WO2017164251A1 - 極端紫外光生成装置及び極端紫外光の重心位置の制御方法 - Google Patents
極端紫外光生成装置及び極端紫外光の重心位置の制御方法 Download PDFInfo
- Publication number
- WO2017164251A1 WO2017164251A1 PCT/JP2017/011516 JP2017011516W WO2017164251A1 WO 2017164251 A1 WO2017164251 A1 WO 2017164251A1 JP 2017011516 W JP2017011516 W JP 2017011516W WO 2017164251 A1 WO2017164251 A1 WO 2017164251A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- target
- euv light
- extreme ultraviolet
- ultraviolet light
- center
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 72
- 238000005259 measurement Methods 0.000 claims abstract description 56
- 230000001678 irradiating effect Effects 0.000 claims abstract description 9
- 230000005484 gravity Effects 0.000 claims description 169
- 238000011156 evaluation Methods 0.000 claims description 104
- 230000036278 prepulse Effects 0.000 claims description 62
- 238000012886 linear function Methods 0.000 claims description 6
- 238000012888 cubic function Methods 0.000 claims description 5
- 230000003287 optical effect Effects 0.000 description 92
- 238000001514 detection method Methods 0.000 description 60
- 230000008569 process Effects 0.000 description 55
- 238000005286 illumination Methods 0.000 description 27
- 238000010586 diagram Methods 0.000 description 26
- 230000000052 comparative effect Effects 0.000 description 16
- 238000012545 processing Methods 0.000 description 14
- 230000007246 mechanism Effects 0.000 description 13
- 230000000694 effects Effects 0.000 description 12
- 230000005540 biological transmission Effects 0.000 description 10
- 230000036544 posture Effects 0.000 description 10
- 230000005855 radiation Effects 0.000 description 8
- ATJFFYVFTNAWJD-UHFFFAOYSA-N Tin Chemical compound [Sn] ATJFFYVFTNAWJD-UHFFFAOYSA-N 0.000 description 4
- 230000003111 delayed effect Effects 0.000 description 4
- 230000006866 deterioration Effects 0.000 description 4
- 239000007769 metal material Substances 0.000 description 4
- 230000035945 sensitivity Effects 0.000 description 4
- 229910052718 tin Inorganic materials 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 238000011084 recovery Methods 0.000 description 3
- 230000005469 synchrotron radiation Effects 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- 238000004364 calculation method Methods 0.000 description 2
- 239000000155 melt Substances 0.000 description 2
- 238000002844 melting Methods 0.000 description 2
- 230000008018 melting Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 239000002245 particle Substances 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 229910052688 Gadolinium Inorganic materials 0.000 description 1
- ZOKXTWBITQBERF-UHFFFAOYSA-N Molybdenum Chemical compound [Mo] ZOKXTWBITQBERF-UHFFFAOYSA-N 0.000 description 1
- 229910052771 Terbium Inorganic materials 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 238000011109 contamination Methods 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 239000010419 fine particle Substances 0.000 description 1
- UIWYJDYFSGRHKR-UHFFFAOYSA-N gadolinium atom Chemical compound [Gd] UIWYJDYFSGRHKR-UHFFFAOYSA-N 0.000 description 1
- 230000010365 information processing Effects 0.000 description 1
- 150000002500 ions Chemical class 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 239000003595 mist Substances 0.000 description 1
- 239000003607 modifier Substances 0.000 description 1
- 229910052750 molybdenum Inorganic materials 0.000 description 1
- 239000011733 molybdenum Substances 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000000206 photolithography Methods 0.000 description 1
- 230000002250 progressing effect Effects 0.000 description 1
- 238000012887 quadratic function Methods 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- GZCRRIHWUXGPOV-UHFFFAOYSA-N terbium atom Chemical compound [Tb] GZCRRIHWUXGPOV-UHFFFAOYSA-N 0.000 description 1
Images





















Classifications
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05G—X-RAY TECHNIQUE
- H05G2/00—Apparatus or processes specially adapted for producing X-rays, not involving X-ray tubes, e.g. involving generation of a plasma
- H05G2/001—X-ray radiation generated from plasma
- H05G2/008—X-ray radiation generated from plasma involving a beam of energy, e.g. laser or electron beam in the process of exciting the plasma
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J1/00—Photometry, e.g. photographic exposure meter
- G01J1/02—Details
- G01J1/04—Optical or mechanical part supplementary adjustable parts
- G01J1/0407—Optical elements not provided otherwise, e.g. manifolds, windows, holograms, gratings
- G01J1/0411—Optical elements not provided otherwise, e.g. manifolds, windows, holograms, gratings using focussing or collimating elements, i.e. lenses or mirrors; Aberration correction
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J1/00—Photometry, e.g. photographic exposure meter
- G01J1/42—Photometry, e.g. photographic exposure meter using electric radiation detectors
- G01J1/4209—Photoelectric exposure meters for determining the exposure time in recording or reproducing
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J1/00—Photometry, e.g. photographic exposure meter
- G01J1/42—Photometry, e.g. photographic exposure meter using electric radiation detectors
- G01J1/4257—Photometry, e.g. photographic exposure meter using electric radiation detectors applied to monitoring the characteristics of a beam, e.g. laser beam, headlamp beam
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J1/00—Photometry, e.g. photographic exposure meter
- G01J1/42—Photometry, e.g. photographic exposure meter using electric radiation detectors
- G01J1/429—Photometry, e.g. photographic exposure meter using electric radiation detectors applied to measurement of ultraviolet light
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70008—Production of exposure light, i.e. light sources
- G03F7/70033—Production of exposure light, i.e. light sources by plasma extreme ultraviolet [EUV] sources
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01S—DEVICES USING THE PROCESS OF LIGHT AMPLIFICATION BY STIMULATED EMISSION OF RADIATION [LASER] TO AMPLIFY OR GENERATE LIGHT; DEVICES USING STIMULATED EMISSION OF ELECTROMAGNETIC RADIATION IN WAVE RANGES OTHER THAN OPTICAL
- H01S3/00—Lasers, i.e. devices using stimulated emission of electromagnetic radiation in the infrared, visible or ultraviolet wave range
- H01S3/005—Optical devices external to the laser cavity, specially adapted for lasers, e.g. for homogenisation of the beam or for manipulating laser pulses, e.g. pulse shaping
- H01S3/0071—Beam steering, e.g. whereby a mirror outside the cavity is present to change the beam direction
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Engineering & Computer Science (AREA)
- Plasma & Fusion (AREA)
- Electromagnetism (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- X-Ray Techniques (AREA)
Abstract
極端紫外光生成装置は、チャンバ内の所定領域に供給されたターゲットにレーザ光が照射されることによって生成された極端紫外光のエネルギを互いに異なる方向から計測する複数のEUV光センサと、所定領域に供給されたターゲットに対するレーザ光の照射位置を調節する照射位置調節部と、複数のEUV光センサの計測結果から特定された極端紫外光の重心位置が目標重心位置となるよう照射位置調節部を制御する制御部と、を備え、制御部は、互いに位置が異なる複数の走査水準に従って照射位置が走査されるよう照射位置調節部を制御し、複数の走査水準のそれぞれで取得された計測結果に基づいて目標重心位置を較正する。
Description
本開示は、極端紫外光生成装置及び極端紫外光の重心位置の制御方法に関する。
近年、半導体プロセスの微細化に伴って、半導体プロセスの光リソグラフィにおける転写パターンの微細化が急速に進展している。次世代においては、20nm以下の微細加工が要求されるようになる。このため、波長13nm程度の極端紫外(EUV)光を生成する極端紫外(EUV)光生成装置と縮小投影反射光学系とを組み合わせた露光装置の開発が期待されている。
EUV光生成装置としては、ターゲットにレーザ光を照射することによって生成されるプラズマが用いられるLPP(Laser Produced Plasma)式の装置と、放電によって生成されるプラズマが用いられるDPP(Discharge Produced Plasma)式の装置と、軌道放射光が用いられるSR(Synchrotron Radiation)式の装置との3種類の装置が提案されている。
本開示の1つの観点に係る極端紫外光生成装置は、チャンバ内の所定領域に供給されたターゲットにレーザ光が照射されることによって生成された極端紫外光のエネルギを互いに異なる方向から計測する複数のEUV光センサと、所定領域に供給されたターゲットに対するレーザ光の照射位置を調節する照射位置調節部と、複数のEUV光センサの計測結果から特定された極端紫外光の重心位置が目標重心位置となるよう照射位置調節部を制御する制御部と、を備え、制御部は、互いに位置が異なる複数の走査水準に従って照射位置が走査されるよう照射位置調節部を制御し、複数の走査水準のそれぞれで取得された計測結果に基づいて目標重心位置を較正する。
本開示の他の観点に係る極端紫外光の重心位置の制御方法は、ターゲットにレーザ光が照射されることによって生成された極端紫外光の重心位置を制御する方法であって、互いに位置が異なる複数の走査水準に従ってターゲットに対するレーザ光の照射位置を走査して、複数の走査水準のそれぞれで極端紫外光のエネルギを取得する第1ステップと、第1ステップによって取得されたエネルギから、複数の走査水準のそれぞれでの重心位置の評価値を特定する第2ステップと、第1ステップによって取得されたエネルギと、第2ステップによって特定された評価値との少なくとも一方に基づいて、重心位置の目標重心位置を較正する第3ステップと、を備える。
本開示のいくつかの実施形態を、単なる例として、添付の図面を参照して以下に説明する。
図1は、比較例のEUV光生成装置の構成を説明するための図を示す。
図2は、図1に示されたEUV光センサの配置を説明するための図を示す。
図3は、図2に示されたEUV光センサの配置をX軸方向の逆方向から視た図を示す。
図4は、第1実施形態に係る制御部によって実行される目標重心位置の較正処理を説明するためのフローチャートを示す。
図5は、図4のステップS1において設定される走査水準群の例を示す。
図6は、図4のステップS7において作成されるEUV光のエネルギの分布図の例を示す。
図7は、図4のステップS7において作成されるEUV光の重心位置のX軸座標成分における評価値の分布図の例を示す。
図8は、図4のステップS7において作成されるEUV光の重心位置のY軸座標成分における評価値の分布図の例を示す。
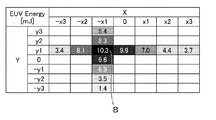
図9は、図6に示された走査水準Aを中心としてX軸及びY軸に沿って配列された複数の走査水準と、これらの走査水準に対応付けて記憶されたEUV光センサの計測結果とを示す。
図10は、図6に示された走査水準Aを中心としてX軸に沿って配列された複数の走査水準と、これらの走査水準に対応付けて記憶されたEUV光の重心位置のX軸座標成分における評価値とを示す。
図11は、図6に示された走査水準Aを中心としてY軸に沿って配列された複数の走査水準と、これらの走査水準に対応付けて記憶されたEUV光の重心位置のY軸座標成分における評価値とを示す。
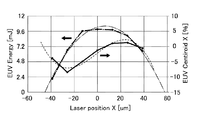
図12は、X軸に沿った方向においてのEUV光のエネルギ分布と重心位置の評価値の分布とを示す。
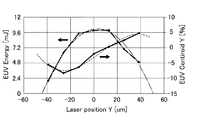
図13は、Y軸に沿った方向においてのEUV光のエネルギ分布と重心位置の評価値の分布とを示す。
図14は、図6に示された走査水準Bを中心としてX軸及びY軸に沿って配列された複数の走査水準と、これらの走査水準に対応付けて記憶されたEUV光センサの計測結果とを示す。
図15は、図6に示された走査水準B中心としてX軸に沿って配列された複数の走査水準と、これらの走査水準に対応付けて記憶されたEUV光の重心位置のX軸座標成分における評価値とを示す。
図16は、図6に示された走査水準Bを中心としてY軸に沿って配列された複数の走査水準と、これらの走査水準に対応付けて記憶されたEUV光の重心位置のY軸座標成分における評価値とを示す。
図17は、走査水準Bを中心としX軸に沿った方向においてのEUV光のエネルギ分布と重心位置の評価値の分布とを示す。
図18は、走査水準Bを中心としY軸に沿った方向においてのEUV光のエネルギ分布と重心位置の評価値の分布とを示す。
図19は、第3実施形態のEUV光生成装置を備えるEUV光生成システムの構成を説明するための図を示す。
図20は、第3実施形態に係る制御部によって実行される目標重心位置の較正処理を説明するためのフローチャートを示す。
図21は、第4実施形態に係る制御部が目標重心位置の較正処理を実行する時期を説明するためのフローチャートを示す。
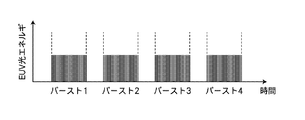
図22は、第5実施形態においてなされるEUV光のバースト発光を説明するための図を示す。
図23は、第5実施形態において測定されるEUV光エネルギのばらつき指標の分布図の例を示す。
図24は、第5実施形態において測定されるEUV光の重心位置のX軸座標成分に関する評価値の分布図の例を示す。
図25は、第5実施形態において測定されるEUV光の重心位置のY軸座標成分に関する評価値の分布図の例を示す。
図26は、図23に示された走査水準Aを中心としてX軸及びY軸に沿って配列された複数の走査水準と、これらの走査水準に対応付けて記憶されたEUV光エネルギのばらつき指標とを示す。
図27は、図23に示された走査水準Aを中心としてX軸に沿って配列された複数の走査水準と、これらの走査水準に対応付けて記憶されたEUV光の重心位置のX軸座標成分に関する評価値とを示す。
図28は、図23に示された走査水準Aを中心としてY軸に沿って配列された複数の走査水準と、これらの走査水準に対応付けて記憶されたEUV光の重心位置のY軸座標成分に関する評価値とを示す。
図29は、X軸に沿った方向に関するEUV光エネルギのばらつき指標分布及び、EUV光重心位置の評価値の分布をそれぞれ曲線に近似させた例を示す。
図30は、Y軸に沿った方向に関するEUV光エネルギのばらつき指標分布及び、EUV光重心位置の評価値の分布をそれぞれ曲線に近似させた例を示す。
図31は、第5実施形態における目標重心位置の較正処理を説明するための図を示す。
図32は、第1実施形態における目標重心位置の較正処理を説明するための図を示す。
図33は、第6実施形態における目標重心位置の較正処理を説明するための図を示す。
図34は、第7実施形態における目標重心位置の較正処理を説明するための図を示す。
<内容>
1.用語の説明
2.課題
2.1 比較例の構成
2.2 比較例の動作
2.3 EUV光センサ及びEUV光重心制御
2.4 課題
3.第1実施形態
3.1 構成
3.2 動作
3.3 目標重心位置の決定
3.4 作用効果
4.第2実施形態
5.第3実施形態
5.1 構成
5.2 動作
5.3 作用効果
6.第4実施形態
7.第5実施形態
7.1 構成
7.2 動作
7.3 作用効果
8.第6実施形態
9.第7実施形態
10.その他
1.用語の説明
2.課題
2.1 比較例の構成
2.2 比較例の動作
2.3 EUV光センサ及びEUV光重心制御
2.4 課題
3.第1実施形態
3.1 構成
3.2 動作
3.3 目標重心位置の決定
3.4 作用効果
4.第2実施形態
5.第3実施形態
5.1 構成
5.2 動作
5.3 作用効果
6.第4実施形態
7.第5実施形態
7.1 構成
7.2 動作
7.3 作用効果
8.第6実施形態
9.第7実施形態
10.その他
以下、本開示の実施形態について、図面を参照しながら詳しく説明する。以下に説明される実施形態は、本開示のいくつかの例を示すものであって、本開示の内容を限定するものではない。また、各実施形態で説明される構成及び動作の全てが本開示の構成及び動作として必須であるとは限らない。なお、同一の構成要素には同一の参照符号を付して、重複する説明を省略する。
[1.用語の説明]
「ターゲット」は、チャンバ内に導入されたレーザ光の被照射物である。レーザ光が照射されたターゲットは、プラズマ化してEUV光を含む光を放射する。
「プラズマ生成領域」は、チャンバ内の所定領域である。プラズマ生成領域は、チャンバ内に出力されたターゲットに対してレーザ光が照射され、ターゲットがプラズマ化される領域である。
「ターゲット軌道」は、チャンバ内に出力されたターゲットが進行する経路である。ターゲット軌道は、プラズマ生成領域において、チャンバ内に導入されたレーザ光の光路と交差する。
「光路軸」は、レーザ光の進行方向に沿ってレーザ光のビーム断面の中心を通る軸である。
「光路」は、レーザ光が通る経路である。光路には、光路軸が含まれる。
「Z軸方向」は、チャンバ内に導入されたレーザ光がプラズマ生成領域に向かって進行する際の当該レーザ光の進行方向である。Z軸方向は、EUV光生成装置がEUV光を出力する方向と略同一であってもよい。
「Y軸方向」は、ターゲット供給器がチャンバ内にターゲットを出力する方向の逆方向である。Y軸方向は、X軸方向及びZ軸方向に垂直な方向である。
「X軸方向」は、Y軸方向及びZ軸方向に垂直な方向である。
EUV光生成装置による「バースト発光」とは、ある所定の期間、比較的高い周波数で繰り返しEUV光を発光することである。上記所定の期間は「バースト発光期間」とも言われる。通常、このバースト発光期間は、所定の休止期間を間に置いて繰り返すように設定される。つまり各バースト発光期間には、高周波数でパルス状に発光する一まとまりのEUV光が出力される。
「走査水準」は、ターゲットに対するレーザ光の照射位置内でレーザ光を走査させた際の、相異なる複数の走査位置の各々を指す。
「ターゲット」は、チャンバ内に導入されたレーザ光の被照射物である。レーザ光が照射されたターゲットは、プラズマ化してEUV光を含む光を放射する。
「プラズマ生成領域」は、チャンバ内の所定領域である。プラズマ生成領域は、チャンバ内に出力されたターゲットに対してレーザ光が照射され、ターゲットがプラズマ化される領域である。
「ターゲット軌道」は、チャンバ内に出力されたターゲットが進行する経路である。ターゲット軌道は、プラズマ生成領域において、チャンバ内に導入されたレーザ光の光路と交差する。
「光路軸」は、レーザ光の進行方向に沿ってレーザ光のビーム断面の中心を通る軸である。
「光路」は、レーザ光が通る経路である。光路には、光路軸が含まれる。
「Z軸方向」は、チャンバ内に導入されたレーザ光がプラズマ生成領域に向かって進行する際の当該レーザ光の進行方向である。Z軸方向は、EUV光生成装置がEUV光を出力する方向と略同一であってもよい。
「Y軸方向」は、ターゲット供給器がチャンバ内にターゲットを出力する方向の逆方向である。Y軸方向は、X軸方向及びZ軸方向に垂直な方向である。
「X軸方向」は、Y軸方向及びZ軸方向に垂直な方向である。
EUV光生成装置による「バースト発光」とは、ある所定の期間、比較的高い周波数で繰り返しEUV光を発光することである。上記所定の期間は「バースト発光期間」とも言われる。通常、このバースト発光期間は、所定の休止期間を間に置いて繰り返すように設定される。つまり各バースト発光期間には、高周波数でパルス状に発光する一まとまりのEUV光が出力される。
「走査水準」は、ターゲットに対するレーザ光の照射位置内でレーザ光を走査させた際の、相異なる複数の走査位置の各々を指す。
[2.課題]
図1乃至図3を用いて、比較例のEUV光生成装置1について説明する。
比較例のEUV光生成装置1は、LPP方式のEUV光生成装置である。EUV光生成装置1は、少なくとも1つのレーザ装置3と共に用いられる。
EUV光生成装置1及びレーザ装置3を含むシステムを、EUV光生成システム11ともいう。
図1乃至図3を用いて、比較例のEUV光生成装置1について説明する。
比較例のEUV光生成装置1は、LPP方式のEUV光生成装置である。EUV光生成装置1は、少なくとも1つのレーザ装置3と共に用いられる。
EUV光生成装置1及びレーザ装置3を含むシステムを、EUV光生成システム11ともいう。
EUV光生成装置1は、レーザ装置3から出力された少なくとも1つのパルスレーザ光31をターゲット27に照射することによって、ターゲット27のプラズマ275を生成する。生成されたプラズマ275は、放射光276を放射する。放射光276は、EUV光277の他、様々な波長の光を含む。EUV光生成装置1は、放射光276に含まれるEUV光277を捕集して、露光装置9に出力する。
このようにして、EUV光生成装置1は、EUV光277を生成し得る。
このようにして、EUV光生成装置1は、EUV光277を生成し得る。
[2.1 比較例の構成]
図1は、比較例のEUV光生成装置1の構成を説明するための図を示す。
比較例のEUV光生成装置1は、チャンバ2と、レーザ光集光光学系22と、EUV光集光光学系23と、接続部24と、レーザ光伝送光学系33とを備える。加えて、比較例のEUV光生成装置1は、ターゲット供給器25と、ステージ26と、ターゲット回収器28と、ターゲット検出センサ41と、EUV光センサ43と、制御部8とを備える。
図1は、比較例のEUV光生成装置1の構成を説明するための図を示す。
比較例のEUV光生成装置1は、チャンバ2と、レーザ光集光光学系22と、EUV光集光光学系23と、接続部24と、レーザ光伝送光学系33とを備える。加えて、比較例のEUV光生成装置1は、ターゲット供給器25と、ステージ26と、ターゲット回収器28と、ターゲット検出センサ41と、EUV光センサ43と、制御部8とを備える。
チャンバ2は、内部に供給されたターゲット27にパルスレーザ光31が照射されることで、ターゲット27からプラズマ275が生成され、EUV光277が生成される容器である。
チャンバ2の壁211は、チャンバ2の内部空間を形成し、チャンバ2の内部空間を外界から隔絶する。壁211には、パルスレーザ光31をチャンバ2内に導入するためのウインドウ215が設けられている。
また、チャンバ2は、チャンバ2内にターゲット27を供給するためのターゲット供給路212を含む。
チャンバ2の壁211は、チャンバ2の内部空間を形成し、チャンバ2の内部空間を外界から隔絶する。壁211には、パルスレーザ光31をチャンバ2内に導入するためのウインドウ215が設けられている。
また、チャンバ2は、チャンバ2内にターゲット27を供給するためのターゲット供給路212を含む。
レーザ光伝送光学系33は、レーザ装置3から出力されたパルスレーザ光31を、ウインドウ215を介してチャンバ2内に導入する光学系である。
レーザ光伝送光学系33は、チャンバ2の外部に配置される。レーザ光伝送光学系33は、レーザ装置3から出力されたパルスレーザ光31の光路上であって、レーザ装置3とウインドウ215との間に配置される。
レーザ光伝送光学系33は、高反射ミラー331と、高反射ミラー332とを含む。
高反射ミラー331及び332のそれぞれは、それらの位置及び姿勢の少なくとも1つを調節する不図示のステージに搭載される。高反射ミラー331及び332を搭載するステージの動作は、制御部8によって制御される。
レーザ光伝送光学系33は、チャンバ2の外部に配置される。レーザ光伝送光学系33は、レーザ装置3から出力されたパルスレーザ光31の光路上であって、レーザ装置3とウインドウ215との間に配置される。
レーザ光伝送光学系33は、高反射ミラー331と、高反射ミラー332とを含む。
高反射ミラー331及び332のそれぞれは、それらの位置及び姿勢の少なくとも1つを調節する不図示のステージに搭載される。高反射ミラー331及び332を搭載するステージの動作は、制御部8によって制御される。
レーザ光集光光学系22は、ウインドウ215を介してチャンバ2内に導入されたパルスレーザ光31を、プラズマ生成領域R1に集光する光学系である。
レーザ光集光光学系22は、チャンバ2の内部に配置される。レーザ光集光光学系22は、ウインドウ215を透過したパルスレーザ光31の光路上であって、ウインドウ215とプラズマ生成領域R1との間に配置される。
レーザ光集光光学系22は、レーザ光集光ミラー221と、マニピュレータ224とを含む。
レーザ光集光光学系22は、チャンバ2の内部に配置される。レーザ光集光光学系22は、ウインドウ215を透過したパルスレーザ光31の光路上であって、ウインドウ215とプラズマ生成領域R1との間に配置される。
レーザ光集光光学系22は、レーザ光集光ミラー221と、マニピュレータ224とを含む。
レーザ光集光ミラー221は、ウインドウ215を透過したパルスレーザ光31を、プラズマ生成領域R1に向けて反射する。レーザ光集光ミラー221は、反射されたパルスレーザ光31を、プラズマ生成領域R1に集光する。
レーザ光集光ミラー221は、マニピュレータ224に搭載される。
レーザ光集光ミラー221は、軸外放物面ミラー222及び平面ミラー223を用いて構成される。
レーザ光集光ミラー221は、マニピュレータ224に搭載される。
レーザ光集光ミラー221は、軸外放物面ミラー222及び平面ミラー223を用いて構成される。
マニピュレータ224は、レーザ光集光ミラー221の位置及び姿勢の少なくとも1つを調節する機構である。マニピュレータ224は、プラズマ生成領域R1においてパルスレーザ光31がターゲット27に照射されるよう、レーザ光集光ミラー221の位置及び姿勢の少なくとも1つを調節する機構である。
マニピュレータ224の駆動は、制御部8によって制御される。
マニピュレータ224は、X軸及びY軸の少なくとも1つに沿った方向において、レーザ光集光ミラー221を移動させる機構であってもよい。マニピュレータ224は、X軸及びY軸に加えてZ軸に沿った方向において、レーザ光集光ミラー221を移動させる機構であってもよい。マニピュレータ224は、レーザ光集光ミラー221の位置及び姿勢の少なくとも1つを調節する機構であるステージであってもよい。
マニピュレータ224の駆動は、制御部8によって制御される。
マニピュレータ224は、X軸及びY軸の少なくとも1つに沿った方向において、レーザ光集光ミラー221を移動させる機構であってもよい。マニピュレータ224は、X軸及びY軸に加えてZ軸に沿った方向において、レーザ光集光ミラー221を移動させる機構であってもよい。マニピュレータ224は、レーザ光集光ミラー221の位置及び姿勢の少なくとも1つを調節する機構であるステージであってもよい。
EUV光集光光学系23は、放射光276に含まれるEUV光277を捕集し、中間集光点IFに集光する光学系である。
EUV光集光光学系23は、チャンバ2の内部に配置される。
EUV光集光光学系23は、EUV光集光ミラー231を含む。
EUV光集光光学系23は、チャンバ2の内部に配置される。
EUV光集光光学系23は、EUV光集光ミラー231を含む。
EUV光集光ミラー231は、プラズマ生成領域R1においてプラズマ275から放射された放射光276のうちから選択的にEUV光277を反射する。EUV光集光ミラー231は、選択的に反射されたEUV光277を、接続部24内に位置する中間集光点IFに集光する。
EUV光集光ミラー231の反射面は、例えば、モリブデン及びシリコンが交互に積層された多層反射膜によって形成される。EUV光集光ミラー231の反射面は、例えば、第1及び第2焦点を有する回転楕円面の一部で形成される。
EUV光集光ミラー231は、第1焦点がプラズマ生成領域R1に位置し、第2焦点が中間集光点IFに位置するように配置される。
EUV光集光ミラー231の中央部には、貫通孔232が形成される。貫通孔232は、レーザ光集光ミラー221で反射されたパルスレーザ光31をプラズマ生成領域R1に向けて通過させるための孔である。
EUV光集光ミラー231の反射面は、例えば、モリブデン及びシリコンが交互に積層された多層反射膜によって形成される。EUV光集光ミラー231の反射面は、例えば、第1及び第2焦点を有する回転楕円面の一部で形成される。
EUV光集光ミラー231は、第1焦点がプラズマ生成領域R1に位置し、第2焦点が中間集光点IFに位置するように配置される。
EUV光集光ミラー231の中央部には、貫通孔232が形成される。貫通孔232は、レーザ光集光ミラー221で反射されたパルスレーザ光31をプラズマ生成領域R1に向けて通過させるための孔である。
接続部24は、チャンバ2と露光装置9との接続部である。
接続部24は、中間集光点IFに集光されたEUV光277を露光装置9に出力するための不図示のゲートバルブを含む。接続部24に含まれるゲートバルブは、チャンバ2の内部と露光装置9の内部とを気密的に連通又は隔絶させる。
接続部24の内部には、壁241が設けられる。壁241には、アパーチャ242が形成される。アパーチャ242は、中間集光点IFに位置するように形成される。
接続部24は、中間集光点IFに集光されたEUV光277を露光装置9に出力するための不図示のゲートバルブを含む。接続部24に含まれるゲートバルブは、チャンバ2の内部と露光装置9の内部とを気密的に連通又は隔絶させる。
接続部24の内部には、壁241が設けられる。壁241には、アパーチャ242が形成される。アパーチャ242は、中間集光点IFに位置するように形成される。
ターゲット供給器25は、チャンバ2内に供給されるターゲット27を溶融させ、ドロップレットの形態で、プラズマ生成領域R1に向けて出力する機器である。ターゲット供給器25は、いわゆるコンティニュアスジェット方式でターゲット27を出力する機器である。
ターゲット供給器25によって供給されるターゲット27は、金属材料で形成される。ターゲット27を形成する金属材料は、スズ、テルビウム、ガドリニウム、又は、それらの内のいずれか2つ以上の組合せを含む材料である。好適には、ターゲット27を形成する金属材料は、スズである。
ターゲット供給器25は、ステージ26に搭載される。
ターゲット供給器25は、タンク251、ノズル252、ヒータ253、圧力調節器254及びピエゾ素子255を用いて構成される。
ターゲット供給器25の動作は、制御部8によって制御される。
ターゲット供給器25によって供給されるターゲット27は、金属材料で形成される。ターゲット27を形成する金属材料は、スズ、テルビウム、ガドリニウム、又は、それらの内のいずれか2つ以上の組合せを含む材料である。好適には、ターゲット27を形成する金属材料は、スズである。
ターゲット供給器25は、ステージ26に搭載される。
ターゲット供給器25は、タンク251、ノズル252、ヒータ253、圧力調節器254及びピエゾ素子255を用いて構成される。
ターゲット供給器25の動作は、制御部8によって制御される。
ステージ26は、ターゲット供給器25の位置を調節する機構である。ステージ26は、X軸及びZ軸の少なくとも1つに沿った方向において、ターゲット供給器25を移動させる機構である。
ステージ26は、ターゲット供給器25から出力されたターゲット27がプラズマ生成領域R1に供給されるよう、ターゲット供給器25の位置を調節する機構である。
ステージ26の駆動は、制御部8によって制御される。
ステージ26は、ターゲット供給器25から出力されたターゲット27がプラズマ生成領域R1に供給されるよう、ターゲット供給器25の位置を調節する機構である。
ステージ26の駆動は、制御部8によって制御される。
ターゲット回収器28は、チャンバ2内に出力されたターゲット27のうち、パルスレーザ光31が照射されなかったターゲット27を回収する機器である。
ターゲット回収器28は、ターゲット軌道Qの延長線上にあるチャンバ2の壁211に設けられる。
ターゲット回収器28は、ターゲット軌道Qの延長線上にあるチャンバ2の壁211に設けられる。
ターゲット検出センサ41は、ターゲット検出領域R2を通過するターゲット27を検出するセンサである。
ターゲット検出領域R2は、チャンバ2内の所定領域であって、ターゲット供給器25とプラズマ生成領域R1との間にあるターゲット軌道Q上の所定位置に位置する領域である。
ターゲット検出センサ41は、照明部410と、検出部420とを含む。
ターゲット検出領域R2は、チャンバ2内の所定領域であって、ターゲット供給器25とプラズマ生成領域R1との間にあるターゲット軌道Q上の所定位置に位置する領域である。
ターゲット検出センサ41は、照明部410と、検出部420とを含む。
照明部410及び検出部420は、それぞれウインドウ216及びウインドウ217を介して、ターゲット供給路212の壁211に接続される。
照明部410及び検出部420は、ターゲット軌道Q上のターゲット検出領域R2を挟んで互いに対向するように配置される。
照明部410及び検出部420は、照明部410の照明光軸及び検出部420の検出光軸が、図1に示されるように、互いに略同軸でターゲット検出領域R2を通るように配置される。
なお、照明部410の照明光軸とは、照明部410からターゲット検出領域R2に向けて出力された照明光の光路軸である。検出部420の検出光軸とは、照明部410からターゲット検出領域R2に向けて出力された照明光のうち、検出部420によって検出される照明光の光路軸である。
照明部410及び検出部420は、ターゲット軌道Q上のターゲット検出領域R2を挟んで互いに対向するように配置される。
照明部410及び検出部420は、照明部410の照明光軸及び検出部420の検出光軸が、図1に示されるように、互いに略同軸でターゲット検出領域R2を通るように配置される。
なお、照明部410の照明光軸とは、照明部410からターゲット検出領域R2に向けて出力された照明光の光路軸である。検出部420の検出光軸とは、照明部410からターゲット検出領域R2に向けて出力された照明光のうち、検出部420によって検出される照明光の光路軸である。
照明部410は、ターゲット検出領域R2を通過するターゲット27を照明するように、ターゲット検出領域R2に向けて照明光を出力する。
照明部410は、光源411及び照明光学系412を用いて構成される。
照明部410は、光源411及び照明光学系412を用いて構成される。
検出部420は、ターゲット検出領域R2を通過するターゲット27を照明するように出力された照明光の光強度を検出することで、ターゲット検出領域R2を通過するターゲット27を検出する。
検出部420は、光センサ421及び受光光学系422を用いて構成される。
検出部420は、光センサ421及び受光光学系422を用いて構成される。
EUV光センサ43は、プラズマ275から放射された放射光276に含まれるEUV光277のエネルギを計測するセンサである。
EUV光センサ43は、複数のEUV光センサ43から構成される。
複数のEUV光センサ43のそれぞれは、互いに異なる方向からEUV光277のエネルギを計測し、その計測値を制御部8に送信する。
複数のEUV光センサ43のそれぞれの動作は、制御部8によって制御される。
EUV光センサ43の詳細な構成については、図2及び図3を用いて後述する。
EUV光センサ43は、複数のEUV光センサ43から構成される。
複数のEUV光センサ43のそれぞれは、互いに異なる方向からEUV光277のエネルギを計測し、その計測値を制御部8に送信する。
複数のEUV光センサ43のそれぞれの動作は、制御部8によって制御される。
EUV光センサ43の詳細な構成については、図2及び図3を用いて後述する。
制御部8は、外部装置である露光装置9からの各種指令に基づいて、EUV光生成システム11の各構成要素の動作を統括的に制御する。
制御部8は、レーザ装置3を制御し、レーザ装置3からのパルスレーザ光31の出力を制御する。
制御部8は、ターゲット供給器25を制御し、ターゲット供給器25からのターゲット27の出力を制御する。
制御部8は、高反射ミラー331及び332を搭載する不図示のステージを制御し、高反射ミラー331及び332のそれぞれの位置及び姿勢の少なくとも1つを制御する。
制御部8は、マニピュレータ224を制御し、レーザ光集光ミラー221の位置及び姿勢の少なくとも1つを制御する。それにより、制御部8は、プラズマ生成領域R1におけるパルスレーザ光31の集光位置を制御する。
制御部8は、ステージ26を制御し、ターゲット供給器25の位置を制御する。それにより、制御部8は、プラズマ生成領域R1に供給されたターゲット27の位置を制御する。
制御部8は、レーザ装置3を制御し、レーザ装置3からのパルスレーザ光31の出力を制御する。
制御部8は、ターゲット供給器25を制御し、ターゲット供給器25からのターゲット27の出力を制御する。
制御部8は、高反射ミラー331及び332を搭載する不図示のステージを制御し、高反射ミラー331及び332のそれぞれの位置及び姿勢の少なくとも1つを制御する。
制御部8は、マニピュレータ224を制御し、レーザ光集光ミラー221の位置及び姿勢の少なくとも1つを制御する。それにより、制御部8は、プラズマ生成領域R1におけるパルスレーザ光31の集光位置を制御する。
制御部8は、ステージ26を制御し、ターゲット供給器25の位置を制御する。それにより、制御部8は、プラズマ生成領域R1に供給されたターゲット27の位置を制御する。
なお、制御部8は、プロセッサ等のハードウェアとプログラムモジュール等のソフトウェアとを組み合わせたコンピュータで構成される。制御部8に含まれるソフトウェアによる情報処理は、制御部8に含まれるハードウェアを用いて具体的に実現される。
[2.2 比較例の動作]
制御部8は、ターゲット供給器25を制御し、ターゲット供給器25からプラズマ生成領域R1に向けてターゲット27を出力させる。
具体的には、制御部8は、ターゲット供給器25のヒータ253をターゲット27の融点以上の温度まで加熱させ、ターゲット供給器25のタンク251に収容された固体のターゲット27を溶融させる。ターゲット27を形成する金属材料がスズである場合、スズの融点が232℃であることから、制御部8は、例えば250℃以上290℃以下の温度でヒータ253を加熱させる。
制御部8は、ターゲット供給器25の圧力調節器254を制御して、タンク251内のターゲット27が所定速度で連続的にノズル252から出力されるよう、タンク251内のターゲット27に所定圧力を加える。
制御部8は、ターゲット供給器25のピエゾ素子255を所定波形で振動させ、連続的に出力されたターゲット27を所定周期で分断してドロップレット状のターゲット27を形成し、ノズル252から所定周波数で出力させる。
制御部8は、ターゲット供給器25を制御し、ターゲット供給器25からプラズマ生成領域R1に向けてターゲット27を出力させる。
具体的には、制御部8は、ターゲット供給器25のヒータ253をターゲット27の融点以上の温度まで加熱させ、ターゲット供給器25のタンク251に収容された固体のターゲット27を溶融させる。ターゲット27を形成する金属材料がスズである場合、スズの融点が232℃であることから、制御部8は、例えば250℃以上290℃以下の温度でヒータ253を加熱させる。
制御部8は、ターゲット供給器25の圧力調節器254を制御して、タンク251内のターゲット27が所定速度で連続的にノズル252から出力されるよう、タンク251内のターゲット27に所定圧力を加える。
制御部8は、ターゲット供給器25のピエゾ素子255を所定波形で振動させ、連続的に出力されたターゲット27を所定周期で分断してドロップレット状のターゲット27を形成し、ノズル252から所定周波数で出力させる。
チャンバ2内へ出力されたターゲット27は、ドロップレットの形態でターゲット軌道Q上を進行し、ターゲット検出領域R2を通過する。ターゲット検出領域R2を通過したターゲット27は、プラズマ生成領域R1に供給される。
ターゲット検出センサ41は、ターゲット27がターゲット検出領域R2を通過したタイミングを検出する。
具体的には、照明部410の光源411は、ターゲット検出領域R2を通過するターゲット27を照明するように、照明光学系412を介して、ターゲット検出領域R2に向けて照明光を出力する。
検出部420の光センサ421は、ターゲット検出領域R2に出力された照明光を受光光学系422を介して検出することで、ターゲット検出領域R2を通過するターゲット27を検出する。光センサ421で検出された照明光の光強度は、ターゲット27がターゲット検出領域R2を通過する毎に低下し得る。光センサ421は、検出された照明光の光強度の変化に応じた出力信号を生成し、制御部8に送信する。
なお、光センサ421によって検出された照明光の光強度の変化に応じた出力信号を、通過タイミング信号ともいう。
具体的には、照明部410の光源411は、ターゲット検出領域R2を通過するターゲット27を照明するように、照明光学系412を介して、ターゲット検出領域R2に向けて照明光を出力する。
検出部420の光センサ421は、ターゲット検出領域R2に出力された照明光を受光光学系422を介して検出することで、ターゲット検出領域R2を通過するターゲット27を検出する。光センサ421で検出された照明光の光強度は、ターゲット27がターゲット検出領域R2を通過する毎に低下し得る。光センサ421は、検出された照明光の光強度の変化に応じた出力信号を生成し、制御部8に送信する。
なお、光センサ421によって検出された照明光の光強度の変化に応じた出力信号を、通過タイミング信号ともいう。
制御部8は、ターゲット検出センサ41から送信された通過タイミング信号を受信する。
制御部8は、通過タイミング信号が所定の閾値より低くなったタイミングを、ターゲット27がターゲット検出領域R2を通過したタイミングと判定する。すなわち、制御部8は、ターゲット検出センサ41の検出結果に基づいて、ターゲット27がターゲット検出領域R2を通過したタイミングを特定する。
制御部8は、通過タイミング信号が所定の閾値より低くなったタイミングで、ターゲット27がターゲット検出領域R2を通過したことを示すターゲット検出信号を生成する。
なお、ターゲット27がターゲット検出領域R2を通過したタイミングを、単に、ターゲット検出領域R2の通過タイミングともいう。
制御部8は、通過タイミング信号が所定の閾値より低くなったタイミングを、ターゲット27がターゲット検出領域R2を通過したタイミングと判定する。すなわち、制御部8は、ターゲット検出センサ41の検出結果に基づいて、ターゲット27がターゲット検出領域R2を通過したタイミングを特定する。
制御部8は、通過タイミング信号が所定の閾値より低くなったタイミングで、ターゲット27がターゲット検出領域R2を通過したことを示すターゲット検出信号を生成する。
なお、ターゲット27がターゲット検出領域R2を通過したタイミングを、単に、ターゲット検出領域R2の通過タイミングともいう。
制御部8は、ターゲット検出信号を生成したタイミングから遅延時間Tdだけ遅延したタイミングで、パルスレーザ光31を出力する契機を与えるトリガ信号をレーザ装置3に送信する。すなわち、制御部8は、ターゲット検出領域R2の通過タイミングに遅延時間Tdを付加したタイミングで、レーザ装置3からパルスレーザ光31を出力させる。
遅延時間Tdは、パルスレーザ光31がプラズマ生成領域R1に集光されるタイミングを、ターゲット27がプラズマ生成領域R1に供給されるタイミングに略一致させるための時間である。遅延時間Tdは、プラズマ生成領域R1に供給されたターゲット27にパルスレーザ光31が照射されるタイミングを規定する。遅延時間Tdは、制御部8に予め記憶されている。
なお、プラズマ生成領域R1に供給されたターゲット27に対するパルスレーザ光31の照射タイミングを、単に、パルスレーザ光31の照射タイミングともいう。
遅延時間Tdは、パルスレーザ光31がプラズマ生成領域R1に集光されるタイミングを、ターゲット27がプラズマ生成領域R1に供給されるタイミングに略一致させるための時間である。遅延時間Tdは、プラズマ生成領域R1に供給されたターゲット27にパルスレーザ光31が照射されるタイミングを規定する。遅延時間Tdは、制御部8に予め記憶されている。
なお、プラズマ生成領域R1に供給されたターゲット27に対するパルスレーザ光31の照射タイミングを、単に、パルスレーザ光31の照射タイミングともいう。
レーザ装置3は、トリガ信号を受信すると、パルスレーザ光31を出力する。
レーザ装置3から出力されたパルスレーザ光31は、レーザ光伝送光学系33の高反射ミラー331及び332で反射され、ウインドウ215を透過して、チャンバ2内に導入される。チャンバ2内に導入されたパルスレーザ光31は、レーザ光集光光学系22によってプラズマ生成領域R1に集光される。プラズマ生成領域R1に集光されたパルスレーザ光31は、プラズマ生成領域R1に供給されたターゲット27に照射される。
プラズマ生成領域R1に供給されたターゲット27は、パルスレーザ光31が照射されることによって、プラズマ化し、放射光276を放射する。放射光276に含まれるEUV光277は、EUV光集光光学系23のEUV光集光ミラー231で選択的に反射され、接続部24の中間集光点IFに集光される。中間集光点IFに集光されたEUV光277は、露光装置9に向かって出力される。
[2.3 EUV光センサ及びEUV光重心制御]
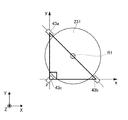
図2は、図1に示されたEUV光センサ43の配置を説明するための図を示す。図3は、図2に示されたEUV光センサ43の配置をX軸方向の逆方向から視た図を示す。
比較例に係る複数のEUV光センサ43は、少なくとも3つのEUV光センサ43から構成される。複数のEUV光センサ43は、図2及び図3に示されるように、例えばEUV光センサ43a乃至43cから構成される。
複数のEUV光センサ43a乃至43cのそれぞれは、互いに異なる方向からプラズマ生成領域R1と対向するようにチャンバ2の壁211に設けられる。複数のEUV光センサ43a乃至43cのそれぞれは、EUV光集光ミラー231によって反射されたEUV光277の光路を遮らないように配置される。複数のEUV光センサ43a乃至43cのそれぞれは、EUV光集光ミラー231の外周縁に沿って配置される。複数のEUVセンサ光43a乃至43cは、プラズマ生成領域R1においてプラズマ275が生成された際にそれらによって計測されるエネルギの差が小さくなるよう、プラズマ生成領域R1に対して互いに等距離に配置される。
図2は、図1に示されたEUV光センサ43の配置を説明するための図を示す。図3は、図2に示されたEUV光センサ43の配置をX軸方向の逆方向から視た図を示す。
比較例に係る複数のEUV光センサ43は、少なくとも3つのEUV光センサ43から構成される。複数のEUV光センサ43は、図2及び図3に示されるように、例えばEUV光センサ43a乃至43cから構成される。
複数のEUV光センサ43a乃至43cのそれぞれは、互いに異なる方向からプラズマ生成領域R1と対向するようにチャンバ2の壁211に設けられる。複数のEUV光センサ43a乃至43cのそれぞれは、EUV光集光ミラー231によって反射されたEUV光277の光路を遮らないように配置される。複数のEUV光センサ43a乃至43cのそれぞれは、EUV光集光ミラー231の外周縁に沿って配置される。複数のEUVセンサ光43a乃至43cは、プラズマ生成領域R1においてプラズマ275が生成された際にそれらによって計測されるエネルギの差が小さくなるよう、プラズマ生成領域R1に対して互いに等距離に配置される。
複数のEUV光センサ43a乃至43cのそれぞれは、EUV光277の重心位置を評価し易いような位置に配置される。
例えば、複数のEUV光センサ43a乃至43cは、図2に示されるような直角二等辺三角形の各頂点にそれぞれ配置される。図2に示された直角二等辺三角形は、その長辺の中点がプラズマ生成領域R1に位置し、その頂角がZ軸上に位置し、その2つの短辺がX軸及びY軸にそれぞれ沿うように配置された直角二等辺三角形である。
EUV光センサ43aは、図2に示された直角二等辺三角形のY軸に沿った軸上に位置する頂点に配置されたEUV光センサ43である。EUV光センサ43bは、図2に示された直角二等辺三角形のX軸に沿った軸上に位置する頂点に配置されたEUV光センサ43である。EUV光センサ43cは、図2に示された直角二等辺三角形のZ軸上に位置する頂点に配置されたEUV光センサ43である。
例えば、複数のEUV光センサ43a乃至43cは、図2に示されるような直角二等辺三角形の各頂点にそれぞれ配置される。図2に示された直角二等辺三角形は、その長辺の中点がプラズマ生成領域R1に位置し、その頂角がZ軸上に位置し、その2つの短辺がX軸及びY軸にそれぞれ沿うように配置された直角二等辺三角形である。
EUV光センサ43aは、図2に示された直角二等辺三角形のY軸に沿った軸上に位置する頂点に配置されたEUV光センサ43である。EUV光センサ43bは、図2に示された直角二等辺三角形のX軸に沿った軸上に位置する頂点に配置されたEUV光センサ43である。EUV光センサ43cは、図2に示された直角二等辺三角形のZ軸上に位置する頂点に配置されたEUV光センサ43である。
EUV光277の重心位置は、EUV光277のエネルギ分布の重心位置である。すなわち、EUV光277の重心位置は、EUV光277のエネルギ分布における加重平均の位置である。具体的には、EUV光277の重心位置は、EUV光277のエネルギを複数のEUV光センサ43a乃至43cで計測して得られた複数の計測値から特定された空間的な位置である。
EUV光277の重心位置は、プラズマ生成領域R1に供給されたターゲット27に対するパルスレーザ光31の照射位置を反映する指標である。EUV光277の重心位置は、パルスレーザ光31の照射条件がEUV光277の性能を満たすような条件であるかを評価する指標である。EUV光277の重心位置が目標重心位置となるように制御されることは、パルスレーザ光31がターゲット27に適切に照射されることを意味する。目標重心位置は、例えば、プラズマ生成領域R1における所定位置である。
EUV光277の重心位置は、プラズマ生成領域R1に供給されたターゲット27に対するパルスレーザ光31の照射位置を反映する指標である。EUV光277の重心位置は、パルスレーザ光31の照射条件がEUV光277の性能を満たすような条件であるかを評価する指標である。EUV光277の重心位置が目標重心位置となるように制御されることは、パルスレーザ光31がターゲット27に適切に照射されることを意味する。目標重心位置は、例えば、プラズマ生成領域R1における所定位置である。
比較例に係る制御部8は、数式1の計算値を、EUV光277の重心位置におけるX軸座標成分を評価する指標を示す評価値として定義する。制御部8は、数式2の計算値を、EUV光277の重心位置におけるY軸座標成分を評価する指標を示す評価値として定義する。なお、この評価値の定義は、EUV光277の目標重心位置が、図2に示すEUV光センサ43a、43b及び43aの各々から等距離の位置にあることを前提とする。


E1は、EUV光センサ43aの計測値である。E2は、EUV光センサ43bの計測値である。E3は、EUV光センサ43cの計測値である。
EUVCentroid_xは、現在のEUV光277の重心位置におけるX軸座標成分と、目標重心位置におけるX軸座標成分との偏差を規格化した値である。EUVCentroid_xは、X軸に沿った方向におけるEUV光277のエネルギ分布の偏在性を示す。EUVCentroid_yは、現在のEUV光277の重心位置におけるY軸座標成分と、目標重心位置におけるY軸座標成分との偏差を規格化した値である。EUVCentroid_yは、Y軸に沿った方向におけるEUV光277のエネルギ分布の偏在性を示す。
EUVCentroid_xは、現在のEUV光277の重心位置におけるX軸座標成分と、目標重心位置におけるX軸座標成分との偏差を規格化した値である。EUVCentroid_xは、X軸に沿った方向におけるEUV光277のエネルギ分布の偏在性を示す。EUVCentroid_yは、現在のEUV光277の重心位置におけるY軸座標成分と、目標重心位置におけるY軸座標成分との偏差を規格化した値である。EUVCentroid_yは、Y軸に沿った方向におけるEUV光277のエネルギ分布の偏在性を示す。
制御部8は、EUV光重心制御を実行可能に構成される。
EUV光重心制御とは、EUV光277の生成中に複数のEUV光センサ43a乃至43cのそれぞれの計測結果に基づいてEUV光277の重心位置が目標重心位置となるようレーザ光集光光学系22をフィードバック方式で制御することである。
具体的には、制御部8は、EUV光重心制御として、次のような処理を実行する機能を備える。
EUV光重心制御とは、EUV光277の生成中に複数のEUV光センサ43a乃至43cのそれぞれの計測結果に基づいてEUV光277の重心位置が目標重心位置となるようレーザ光集光光学系22をフィードバック方式で制御することである。
具体的には、制御部8は、EUV光重心制御として、次のような処理を実行する機能を備える。
制御部8は、ターゲット検出信号を生成したタイミングから所定の遅延時間だけ遅延したタイミングで、複数のEUV光センサ43a乃至43cのそれぞれに第1ゲート信号を送信する。
第1ゲート信号は、EUV光277のエネルギを計測する契機を複数のEUV光センサ43a乃至43cのそれぞれに与える信号である。
複数のEUV光センサ43a乃至43cは、それぞれ第1ゲート信号を受信すると、それぞれEUV光277のエネルギを計測し、その計測値E1乃至E3を制御部8に送信する。
制御部8は、数式1及び数式2を用いて、EUV光277の重心位置を評価する。
制御部8は、数式1及び数式2のそれぞれの計算値から、現在のEUV光277の重心位置と目標重心位置との偏差を特定する。
制御部8は、EUV光277の重心位置が目標重心位置となるよう、プラズマ生成領域R1に供給されたターゲット27に対するパルスレーザ光31の照射位置の目標照射位置を設定する。そして、制御部8は、設定された目標照射位置に応じてレーザ光集光光学系22を制御する。具体的には、制御部8は、プラズマ生成領域R1に供給されたターゲット27に対する現在のパルスレーザ光31の照射位置と、目標重心位置に応じたパルスレーザ光31の目標照射位置との偏差を特定する。そして、制御部8は、現在のパルスレーザ光31の集光位置と、目標照射位置に応じたパルスレーザ光31の目標集光位置との偏差を特定する。そして、制御部8は、パルスレーザ光31の集光位置における偏差が無くなるようなマニピュレータ224の駆動量を決定する。制御部8は、決定された駆動量に応じてマニピュレータ224を駆動させ、パルスレーザ光31の集光位置を移動させる。
それにより、制御部8は、プラズマ生成領域R1に供給されたターゲット27に対するパルスレーザ光31の照射位置を目標照射位置に略一致させ、EUV光277の重心位置を目標重心位置に略一致させ得る。
第1ゲート信号は、EUV光277のエネルギを計測する契機を複数のEUV光センサ43a乃至43cのそれぞれに与える信号である。
複数のEUV光センサ43a乃至43cは、それぞれ第1ゲート信号を受信すると、それぞれEUV光277のエネルギを計測し、その計測値E1乃至E3を制御部8に送信する。
制御部8は、数式1及び数式2を用いて、EUV光277の重心位置を評価する。
制御部8は、数式1及び数式2のそれぞれの計算値から、現在のEUV光277の重心位置と目標重心位置との偏差を特定する。
制御部8は、EUV光277の重心位置が目標重心位置となるよう、プラズマ生成領域R1に供給されたターゲット27に対するパルスレーザ光31の照射位置の目標照射位置を設定する。そして、制御部8は、設定された目標照射位置に応じてレーザ光集光光学系22を制御する。具体的には、制御部8は、プラズマ生成領域R1に供給されたターゲット27に対する現在のパルスレーザ光31の照射位置と、目標重心位置に応じたパルスレーザ光31の目標照射位置との偏差を特定する。そして、制御部8は、現在のパルスレーザ光31の集光位置と、目標照射位置に応じたパルスレーザ光31の目標集光位置との偏差を特定する。そして、制御部8は、パルスレーザ光31の集光位置における偏差が無くなるようなマニピュレータ224の駆動量を決定する。制御部8は、決定された駆動量に応じてマニピュレータ224を駆動させ、パルスレーザ光31の集光位置を移動させる。
それにより、制御部8は、プラズマ生成領域R1に供給されたターゲット27に対するパルスレーザ光31の照射位置を目標照射位置に略一致させ、EUV光277の重心位置を目標重心位置に略一致させ得る。
なお、EUV光重心制御において、制御部8は、マニピュレータ224の代わりに、高反射ミラー331を搭載する上述のステージ及び高反射ミラー332を搭載する上述のステージを駆動させることによって、パルスレーザ光31の集光位置を移動させてもよい。また、制御部8は、パルスレーザ光31の集光位置の移動量や移動速度に応じて、マニピュレータ224、高反射ミラー331を搭載する上述のステージ、及び、高反射ミラー332を搭載する上述のステージ、の何れかを駆動させてもよい。
制御部8がEUV光重心制御を実行することにより、プラズマ生成領域R1に供給されたターゲット27の位置とパルスレーザ光31の集光位置との相対的な位置関係が適切な位置関係となる。すなわち、制御部8がEUV光重心制御を実行することにより、プラズマ生成領域R1に供給されたターゲット27に対するパルスレーザ光31の照射位置が適切な位置となる。
プラズマ生成領域R1に供給されたターゲット27の位置とパルスレーザ光31の集光位置との相対的な位置関係がずれると、EUV光生成装置1から出力されるEUV光277の性能が劣化することがある。
EUV光277の性能を評価する指標は、例えば、EUV光277のエネルギ又はエネルギ安定性である。EUV光277の性能が劣化するとは、例えば、EUV光生成装置1から出力されるEUV光277のエネルギ又はエネルギ安定性がそれらの許容範囲から外れることである。EUV光277のエネルギ安定性とは、EUV光277のエネルギのばらつきであり、例えば3σで記述される。
EUV光277の性能を評価する指標は、例えば、EUV光277のエネルギ又はエネルギ安定性である。EUV光277の性能が劣化するとは、例えば、EUV光生成装置1から出力されるEUV光277のエネルギ又はエネルギ安定性がそれらの許容範囲から外れることである。EUV光277のエネルギ安定性とは、EUV光277のエネルギのばらつきであり、例えば3σで記述される。
なお、プラズマ生成領域R1に供給されたターゲット27に対するパルスレーザ光31の照射位置を、単に、パルスレーザ光31の照射位置ともいう。
プラズマ生成領域R1に供給されたターゲット27に対してパルスレーザ光31を照射することを、シューティングともいう。
プラズマ生成領域R1に供給されたターゲット27の位置とパルスレーザ光31の集光位置との相対的な位置関係がずれることを、シューティングずれともいう。
プラズマ生成領域R1に供給されたターゲット27に対してパルスレーザ光31を照射することを、シューティングともいう。
プラズマ生成領域R1に供給されたターゲット27の位置とパルスレーザ光31の集光位置との相対的な位置関係がずれることを、シューティングずれともいう。
[2.4 課題]
プラズマ275から放射された放射光276は、プラズマ生成領域R1を中心として等方的に発散すると考えられる。
このため、複数のEUV光センサ43a乃至43cのそれぞれの検出感度が略同じである場合、EUV光277の生成効率の高いシューティング条件においては、複数のEUV光センサ43a乃至43cのそれぞれの計測値E1乃至E3が、略同じ値となる。この場合、EUV光277の重心位置を評価する指標である数式1及び数式2のそれぞれの計算値は、略ゼロになる。
数式1及び数式2のそれぞれの計算値が略ゼロになることは、EUV光277の重心位置が目標重心位置に略一致することを意味する。言い換えると、複数のEUV光センサ43a乃至43cのそれぞれの検出感度が略同じである場合、数式1及び数式2のそれぞれの計算値に対応した目標重心位置は、ゼロに設定される。
プラズマ275から放射された放射光276は、プラズマ生成領域R1を中心として等方的に発散すると考えられる。
このため、複数のEUV光センサ43a乃至43cのそれぞれの検出感度が略同じである場合、EUV光277の生成効率の高いシューティング条件においては、複数のEUV光センサ43a乃至43cのそれぞれの計測値E1乃至E3が、略同じ値となる。この場合、EUV光277の重心位置を評価する指標である数式1及び数式2のそれぞれの計算値は、略ゼロになる。
数式1及び数式2のそれぞれの計算値が略ゼロになることは、EUV光277の重心位置が目標重心位置に略一致することを意味する。言い換えると、複数のEUV光センサ43a乃至43cのそれぞれの検出感度が略同じである場合、数式1及び数式2のそれぞれの計算値に対応した目標重心位置は、ゼロに設定される。
一方、複数のEUV光センサ43a乃至43cのそれぞれには個体差があることが多い。このため、複数のEUV光センサ43a乃至43cのそれぞれの検出感度には有意な差がある場合がある。この場合、EUV光277の重心位置が目標重心位置に略一致していたとしても、数式1及び数式2のそれぞれの計算値は略ゼロにならないことがある。
また、複数のEUV光センサ43a乃至43cのそれぞれは、EUV光277の生成に寄与しないターゲット27であるデブリによって汚染されることがある。この際、EUV光センサ43の汚染のされ方は、複数のEUV光センサ43a乃至43cのそれぞれによって異なる場合がある。この場合、EUV光277の重心位置が目標重心位置に略一致していたとしても、数式1及び数式2のそれぞれの計算値は略ゼロにならないことがある。
よって、比較例に係る制御部8は、数式1及び数式2の各計算値に対応した目標重心位置を一意的にゼロに設定してEUV光重心制御を実行しても、パルスレーザ光31の照射位置が適切な位置とならず、シューティングずれを抑制できないことがある。
また、複数のEUV光センサ43a乃至43cのそれぞれは、EUV光277の生成に寄与しないターゲット27であるデブリによって汚染されることがある。この際、EUV光センサ43の汚染のされ方は、複数のEUV光センサ43a乃至43cのそれぞれによって異なる場合がある。この場合、EUV光277の重心位置が目標重心位置に略一致していたとしても、数式1及び数式2のそれぞれの計算値は略ゼロにならないことがある。
よって、比較例に係る制御部8は、数式1及び数式2の各計算値に対応した目標重心位置を一意的にゼロに設定してEUV光重心制御を実行しても、パルスレーザ光31の照射位置が適切な位置とならず、シューティングずれを抑制できないことがある。
したがって、EUV光277の重心位置における目標重心位置を較正することでEUV光重心制御を適切に実行し、シューティングずれを抑制し得る技術が望まれている。
[3.第1実施形態]
図2乃至図13を用いて、第1実施形態のEUV光生成装置1について説明する。
第1実施形態のEUV光生成装置1は、EUV光277の重心位置における目標重心位置を較正する機能を備える。
第1実施形態のEUV光生成装置1の構成及び動作において、比較例のEUV光生成装置1と同様の構成及び動作については説明を省略する。
図2乃至図13を用いて、第1実施形態のEUV光生成装置1について説明する。
第1実施形態のEUV光生成装置1は、EUV光277の重心位置における目標重心位置を較正する機能を備える。
第1実施形態のEUV光生成装置1の構成及び動作において、比較例のEUV光生成装置1と同様の構成及び動作については説明を省略する。
[3.1 構成]
第1実施形態のEUV光生成装置1は、照射位置調節部7を備えてもよい。
照射位置調節部7は、パルスレーザ光31の照射位置を調節する機構である。
照射位置調節部7は、図2に示されたレーザ光集光光学系22を用いて構成される。
なお、照射位置調節部7は、EUV光重心制御において、マニピュレータ224の代わりに、高反射ミラー331を搭載する上述のステージ及び高反射ミラー332を搭載する上述のステージを駆動させる場合、これらのステージを用いて構成されてもよい。或いは、照射位置調節部7は、高反射ミラー331及び332を搭載するこれらのステージと、レーザ光集光光学系22とを用いて構成されてもよい。
照射位置調節部7の動作は、制御部8によって制御される。
第1実施形態のEUV光生成装置1は、照射位置調節部7を備えてもよい。
照射位置調節部7は、パルスレーザ光31の照射位置を調節する機構である。
照射位置調節部7は、図2に示されたレーザ光集光光学系22を用いて構成される。
なお、照射位置調節部7は、EUV光重心制御において、マニピュレータ224の代わりに、高反射ミラー331を搭載する上述のステージ及び高反射ミラー332を搭載する上述のステージを駆動させる場合、これらのステージを用いて構成されてもよい。或いは、照射位置調節部7は、高反射ミラー331及び332を搭載するこれらのステージと、レーザ光集光光学系22とを用いて構成されてもよい。
照射位置調節部7の動作は、制御部8によって制御される。
第1実施形態に係る制御部8は、EUV光重心制御を実行するにあたって、EUV光277の重心位置における目標重心位置を較正する機能を含む。
具体的には、制御部8は、EUV光重心制御を実行するにあたって、互いに位置が異なる複数の走査水準を含む走査水準群に従ってパルスレーザ光31の照射位置が走査されるよう照射位置調節部7を制御する。そして、制御部8は、複数の走査水準のそれぞれでEUV光センサ43の計測結果を取得する。そして、制御部8は、取得されたEUV光センサ43の計測結果から、複数の走査水準のそれぞれでのEUV光277の重心位置の評価値を特定する。そして、制御部8は、取得されたEUV光センサ43の計測結果と、特定された重心位置の評価値とに基づいて、EUV光277の重心位置における目標重心位置を較正する。
具体的には、制御部8は、EUV光重心制御を実行するにあたって、互いに位置が異なる複数の走査水準を含む走査水準群に従ってパルスレーザ光31の照射位置が走査されるよう照射位置調節部7を制御する。そして、制御部8は、複数の走査水準のそれぞれでEUV光センサ43の計測結果を取得する。そして、制御部8は、取得されたEUV光センサ43の計測結果から、複数の走査水準のそれぞれでのEUV光277の重心位置の評価値を特定する。そして、制御部8は、取得されたEUV光センサ43の計測結果と、特定された重心位置の評価値とに基づいて、EUV光277の重心位置における目標重心位置を較正する。
第1実施形態のEUV光生成装置1の他の構成については、比較例のEUV光生成装置1と同様である。
[3.2 動作]
第1実施形態のEUV光生成装置1の動作について説明する。具体的には、EUV光277の重心位置における目標重心位置を較正する際に、第1実施形態に係る制御部8が実行する処理について説明する。なお、この「重心位置における目標重心位置」とは、言い換えれば、重心位置の目標値である。
EUV光重心制御を実行するにあたって、EUV光277の重心位置における目標重心位置を較正するために制御部8が実行する処理を、単に、目標重心位置の較正処理ともいう。
第1実施形態のEUV光生成装置1の動作について説明する。具体的には、EUV光277の重心位置における目標重心位置を較正する際に、第1実施形態に係る制御部8が実行する処理について説明する。なお、この「重心位置における目標重心位置」とは、言い換えれば、重心位置の目標値である。
EUV光重心制御を実行するにあたって、EUV光277の重心位置における目標重心位置を較正するために制御部8が実行する処理を、単に、目標重心位置の較正処理ともいう。
図4は、第1実施形態に係る制御部8によって実行される目標重心位置の較正処理を説明するためのフローチャートを示す。図5は、図4のステップS1において設定される走査水準群の例を示す。図6は、図4のステップS7において作成されるEUV光277のエネルギの分布図の例を示す。図7は、図4のステップS7において作成されるEUV光277の重心位置のX軸座標成分における評価値の分布図の例を示す。図8は、図4のステップS7において作成されるEUV光277の重心位置のY軸座標成分における評価値の分布図の例を示す。
制御部8が目標重心位置の較正処理を実行する時期については、図21を用いて後述する。
制御部8が目標重心位置の較正処理を実行する時期については、図21を用いて後述する。
ステップS1において、制御部8は、走査水準群を設定する。
制御部8は、パルスレーザ光31の照射位置がプラズマ生成領域R1に交差するXY平面上で走査されるよう照射位置調節部7を制御する。そして、制御部8は、走査毎にEUV光センサ43の計測結果を取得する。
パルスレーザ光31のプラズマ生成領域R1におけるレイリー長は、100μm以上1000μm以下である。このため、パルスレーザ光31の照射位置がZ軸方向に走査されても、取得される計測結果の走査毎での変化量は小さくなり得る。言い換えると、パルスレーザ光31の照射位置をZ軸方向において走査させても、EUV光重心制御には大きな影響を及ぼさない。よって、制御部8は、照射位置調節部7に、プラズマ生成領域R1に交差するXY平面上でパルスレーザ光31の照射位置を走査させる。なお、XY平面は、プラズマ生成領域R1に向かって進行するパルスレーザ光31の進行方向に垂直な平面である。
制御部8は、パルスレーザ光31の照射位置がプラズマ生成領域R1に交差するXY平面上で走査されるよう照射位置調節部7を制御する。そして、制御部8は、走査毎にEUV光センサ43の計測結果を取得する。
パルスレーザ光31のプラズマ生成領域R1におけるレイリー長は、100μm以上1000μm以下である。このため、パルスレーザ光31の照射位置がZ軸方向に走査されても、取得される計測結果の走査毎での変化量は小さくなり得る。言い換えると、パルスレーザ光31の照射位置をZ軸方向において走査させても、EUV光重心制御には大きな影響を及ぼさない。よって、制御部8は、照射位置調節部7に、プラズマ生成領域R1に交差するXY平面上でパルスレーザ光31の照射位置を走査させる。なお、XY平面は、プラズマ生成領域R1に向かって進行するパルスレーザ光31の進行方向に垂直な平面である。
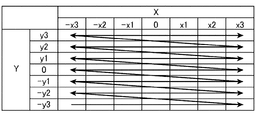
制御部8は、パルスレーザ光31の照射位置を走査させる場合、図5に示されるような、互いに位置が異なる複数の走査水準を含む走査水準群に従って走査させる。すなわち、走査水準群に含まれる複数の走査水準のそれぞれは、パルスレーザ光31の照射位置が走査される位置である。図5の矢印は、走査水準の進行順番を示している。
走査水準群は、図5に示されるように、現在の照射位置を中心としてマトリックス状に配列されたテーブルを用いて作成される。走査水準群に含まれる複数の走査水準は、プラズマ生成領域R1に交差するXY平面上においてX軸及びY軸に沿って配列された複数の位置を示す。
走査水準群は、走査幅R及び間隔Sによって決定される。走査幅Rは、走査水準群全体が示す走査範囲のX軸及びY軸に沿った方向における各幅である。間隔Sは、複数の走査水準のそれぞれの走査間隔である。
走査幅Rは、プラズマ生成領域R1におけるパルスレーザ光31の照射径Dに応じて決定される。照射径Dは、予め実験又はシミュレーション等により決定される。或いは、照射径Dは、レーザ光集光光学系22又はレーザ光伝送光学系33に含まれる光学素子の配置角度等から推定されてもよい。走査幅Rは、例えば、(1/3)D以上(2/3)D以下の範囲に含まれる長さである。走査幅Rは、例えば(2/3)Dである。
間隔Sは、(R/N)から算出される。Nは、走査幅RをX軸及びY軸に沿った方向においてそれぞれ複数の走査水準に分割する場合の分割数である。すなわち、分割数がNである場合、X軸及びY軸方向における走査水準の数は、それぞれN+1となる。分割数Nは、例えば2以上6以下の自然数である。
具体例を挙げると、照射径Dは、例えば120μmである。走査幅Rは、照射径Dが120μmである場合、例えば80μmである。分割数Nは、図5に示されるように、例えば6である。間隔Sは、走査幅Rが80μmであると共に分割数Nが6である場合、例えば13μmである。
なお、走査幅Rは、パルスレーザ光31のビームウエスト部分におけるビーム径であるパルスレーザ光31のスポット径に応じて決定されてもよい。この場合、走査幅Rは、上述の照射径Dをパルスレーザ光31のスポット径に置き換えることで決定される。
走査水準群は、図5に示されるように、現在の照射位置を中心としてマトリックス状に配列されたテーブルを用いて作成される。走査水準群に含まれる複数の走査水準は、プラズマ生成領域R1に交差するXY平面上においてX軸及びY軸に沿って配列された複数の位置を示す。
走査水準群は、走査幅R及び間隔Sによって決定される。走査幅Rは、走査水準群全体が示す走査範囲のX軸及びY軸に沿った方向における各幅である。間隔Sは、複数の走査水準のそれぞれの走査間隔である。
走査幅Rは、プラズマ生成領域R1におけるパルスレーザ光31の照射径Dに応じて決定される。照射径Dは、予め実験又はシミュレーション等により決定される。或いは、照射径Dは、レーザ光集光光学系22又はレーザ光伝送光学系33に含まれる光学素子の配置角度等から推定されてもよい。走査幅Rは、例えば、(1/3)D以上(2/3)D以下の範囲に含まれる長さである。走査幅Rは、例えば(2/3)Dである。
間隔Sは、(R/N)から算出される。Nは、走査幅RをX軸及びY軸に沿った方向においてそれぞれ複数の走査水準に分割する場合の分割数である。すなわち、分割数がNである場合、X軸及びY軸方向における走査水準の数は、それぞれN+1となる。分割数Nは、例えば2以上6以下の自然数である。
具体例を挙げると、照射径Dは、例えば120μmである。走査幅Rは、照射径Dが120μmである場合、例えば80μmである。分割数Nは、図5に示されるように、例えば6である。間隔Sは、走査幅Rが80μmであると共に分割数Nが6である場合、例えば13μmである。
なお、走査幅Rは、パルスレーザ光31のビームウエスト部分におけるビーム径であるパルスレーザ光31のスポット径に応じて決定されてもよい。この場合、走査幅Rは、上述の照射径Dをパルスレーザ光31のスポット径に置き換えることで決定される。
制御部8は、予め複数の走査水準群を保持し、パルスレーザ光31の照射条件及び照射径Dに応じて読み込んでもよい。或いは、制御部8は、パルスレーザ光31の照射条件及び照射径Dに応じて走査水準群を作成してもよい。そして、制御部8は、読み込まれた走査水準群、又は、作成された走査水準群を設定する。
ステップS2において、制御部8は、設定された走査水準群に従ってパルスレーザ光31の照射位置が走査されるよう、照射位置調節部7を制御する。
ステップS3において、制御部8は、トリガ信号をレーザ装置3に送信し、パルスレーザ光31をターゲット27に照射させる。EUV光277が生成される。
ステップS4において、制御部8は、EUV光センサ43の計測結果を取得する。
具体的には、制御部8は、複数のEUV光センサ43a乃至43cのそれぞれから送信された複数の計測値に統計処理を施し、EUV光277のエネルギを取得する。EUV光277のエネルギは、複数のEUV光センサ43a乃至43cのそれぞれから送信された複数の計測値の平均値であってもよい。
制御部8は、EUV光277のエネルギを、EUVセンサ43の計測結果として取得し、現在の走査水準に対応付けて記憶する。
なお、制御部8は、EUV光277のエネルギだけに加えて、EUV光277のエネルギのばらつきを、EUVセンサ43の計測結果として取得してもよい。EUV光277のエネルギのばらつきは、例えば3σであってもよい。
具体的には、制御部8は、複数のEUV光センサ43a乃至43cのそれぞれから送信された複数の計測値に統計処理を施し、EUV光277のエネルギを取得する。EUV光277のエネルギは、複数のEUV光センサ43a乃至43cのそれぞれから送信された複数の計測値の平均値であってもよい。
制御部8は、EUV光277のエネルギを、EUVセンサ43の計測結果として取得し、現在の走査水準に対応付けて記憶する。
なお、制御部8は、EUV光277のエネルギだけに加えて、EUV光277のエネルギのばらつきを、EUVセンサ43の計測結果として取得してもよい。EUV光277のエネルギのばらつきは、例えば3σであってもよい。
ステップS5において、制御部8は、EUV光277の重心位置の評価値を特定する。
具体的には、制御部8は、ステップS4において取得されたEUV光センサ43の計測結果から、数式1及び数式2を計算する。そして、制御部8は、数式1の計算値を、EUV光277の重心位置のX軸座標成分における評価値として特定する。制御部8は、数式2の計算値を、EUV光277の重心位置のY軸座標成分における評価値として特定する。そして、制御部8は、EUV光277の重心位置の評価値として特定された数式1及び数式2のそれぞれの計算値を、現在の走査水準に対応付けて記憶する。
具体的には、制御部8は、ステップS4において取得されたEUV光センサ43の計測結果から、数式1及び数式2を計算する。そして、制御部8は、数式1の計算値を、EUV光277の重心位置のX軸座標成分における評価値として特定する。制御部8は、数式2の計算値を、EUV光277の重心位置のY軸座標成分における評価値として特定する。そして、制御部8は、EUV光277の重心位置の評価値として特定された数式1及び数式2のそれぞれの計算値を、現在の走査水準に対応付けて記憶する。
ステップS6において、制御部8は、設定された走査水準群に含まれる複数の走査水準の全てが走査されたか否かを判定する。
制御部8は、全ての走査水準が走査されていなければ、ステップS2に移行する。一方、制御部8は、全ての走査水準が走査されたならば、ステップS7に移行する。
制御部8は、全ての走査水準が走査されていなければ、ステップS2に移行する。一方、制御部8は、全ての走査水準が走査されたならば、ステップS7に移行する。
ステップS7において、制御部8は、各走査水準に対応付けて記憶されたEUV光センサ43の計測結果に基づいて、図6に示されるようなEUV光277のエネルギの分布図を作成する。加えて、制御部8は、各走査水準に対応付けて記憶された数式1の計算値に基づいて、図7に示されるようなEUV光277の重心位置のX軸座標成分における評価値の分布図を作成する。加えて、制御部8は、各走査水準に対応付けて記憶された数式2の計算値に基づいて、図8に示されるようなEUV光277の重心位置のY軸座標成分における評価値の分布図を作成する。
ステップS8において、制御部8は、ステップS7において作成された各分布図に基づいて、目標重心位置を決定する。
制御部8が目標重心位置を決定する処理については、図6乃至図13を用いて後述する。
制御部8が目標重心位置を決定する処理については、図6乃至図13を用いて後述する。
ステップS9において、制御部8は、ステップS8において決定された目標重心位置を新たな目標重心位置に設定する。そして、制御部8は、EUV光重心制御に移行する。
制御部8は、EUV光277の重心位置が新たな目標重心位置となるよう、パルスレーザ光31の照射位置の目標照射位置を設定する。そして、制御部8は、設定された目標照射位置に応じて照射位置調節部7を制御する。
制御部8は、EUV光277の重心位置が新たな目標重心位置となるよう、パルスレーザ光31の照射位置の目標照射位置を設定する。そして、制御部8は、設定された目標照射位置に応じて照射位置調節部7を制御する。
具体的には、制御部8は、現在のパルスレーザ光31の照射位置と、新たな目標重心位置に応じたパルスレーザ光31の新たな目標照射位置との偏差を特定する。
そして、制御部8は、現在のパルスレーザ光31の集光位置と、新たな目標照射位置に応じたパルスレーザ光31の新たな目標集光位置との偏差を特定する。そして、制御部8は、パルスレーザ光31の集光位置における偏差が無くなるような照射位置調節部7の調節量を決定する。
或いは、制御部8は、パルスレーザ光31の照射位置における偏差と、照射位置調節部7の調節量との対応関係を示すテーブルを予め保持している。そして、制御部8は、このテーブルを参照することで、パルスレーザ光31の照射位置における偏差が無くなるような照射位置調節部7の調節量を決定する。また、制御部8は、パルスレーザ光31の照射位置における偏差と照射位置調節部7の調節量との対応関係が定義された関数を予め保持していてもよい。そして、制御部8は、この関数を計算することで、パルスレーザ光31の照射位置における偏差が無くなるような照射位置調節部7の調節量を決定してもよい。
そして、制御部8は、決定された調節量に応じて照射位置調節部7を制御し、パルスレーザ光31の集光位置を移動させる。それにより、制御部8は、パルスレーザ光31の照射位置を新たな目標照射位置に略一致させ、EUV光277の重心位置を新たな目標重心位置に略一致させ得る。
このようにして、制御部8は、EUV光重心制御を実行するにあたって、その都度、目標重心位置を較正し得る。
そして、制御部8は、現在のパルスレーザ光31の集光位置と、新たな目標照射位置に応じたパルスレーザ光31の新たな目標集光位置との偏差を特定する。そして、制御部8は、パルスレーザ光31の集光位置における偏差が無くなるような照射位置調節部7の調節量を決定する。
或いは、制御部8は、パルスレーザ光31の照射位置における偏差と、照射位置調節部7の調節量との対応関係を示すテーブルを予め保持している。そして、制御部8は、このテーブルを参照することで、パルスレーザ光31の照射位置における偏差が無くなるような照射位置調節部7の調節量を決定する。また、制御部8は、パルスレーザ光31の照射位置における偏差と照射位置調節部7の調節量との対応関係が定義された関数を予め保持していてもよい。そして、制御部8は、この関数を計算することで、パルスレーザ光31の照射位置における偏差が無くなるような照射位置調節部7の調節量を決定してもよい。
そして、制御部8は、決定された調節量に応じて照射位置調節部7を制御し、パルスレーザ光31の集光位置を移動させる。それにより、制御部8は、パルスレーザ光31の照射位置を新たな目標照射位置に略一致させ、EUV光277の重心位置を新たな目標重心位置に略一致させ得る。
このようにして、制御部8は、EUV光重心制御を実行するにあたって、その都度、目標重心位置を較正し得る。
[3.3 目標重心位置の決定]
図6乃至図13を用いて、図4のステップS8において制御部8が目標重心位置を決定する処理について説明する。
図9は、図6に示された走査水準Aを中心としてX軸及びY軸に沿って配列された複数の走査水準と、これらの走査水準に対応付けて記憶されたEUV光センサ43の計測結果とを示す。図10は、図6に示された走査水準Aを中心としてX軸に沿って配列された複数の走査水準と、これらの走査水準に対応付けて記憶されたEUV光277の重心位置のX軸座標成分における評価値とを示す。図11は、図6に示された走査水準Aを中心としてY軸に沿って配列された複数の走査水準と、これらの走査水準に対応付けて記憶されたEUV光277の重心位置のY軸座標成分における評価値とを示す。図12は、X軸に沿った方向においてのEUV光277のエネルギ分布と重心位置の評価値の分布とを示す。図13は、Y軸に沿った方向においてのEUV光277のエネルギ分布と重心位置の評価値の分布とを示す。
制御部8は、図4のステップS7において作成された分布図に基づいて次のような処理を行うことによって、目標重心位置を決定する。
図6乃至図13を用いて、図4のステップS8において制御部8が目標重心位置を決定する処理について説明する。
図9は、図6に示された走査水準Aを中心としてX軸及びY軸に沿って配列された複数の走査水準と、これらの走査水準に対応付けて記憶されたEUV光センサ43の計測結果とを示す。図10は、図6に示された走査水準Aを中心としてX軸に沿って配列された複数の走査水準と、これらの走査水準に対応付けて記憶されたEUV光277の重心位置のX軸座標成分における評価値とを示す。図11は、図6に示された走査水準Aを中心としてY軸に沿って配列された複数の走査水準と、これらの走査水準に対応付けて記憶されたEUV光277の重心位置のY軸座標成分における評価値とを示す。図12は、X軸に沿った方向においてのEUV光277のエネルギ分布と重心位置の評価値の分布とを示す。図13は、Y軸に沿った方向においてのEUV光277のエネルギ分布と重心位置の評価値の分布とを示す。
制御部8は、図4のステップS7において作成された分布図に基づいて次のような処理を行うことによって、目標重心位置を決定する。
具体的には、制御部8は、図6に示されるように、設定された走査水準群に含まれる複数の走査水準のそれぞれで取得されたEUV光センサ43の計測結果のうちで、EUV光277のエネルギが所定範囲内にある走査水準の範囲Kを特定する。所定範囲は、例えば、EUV光277のエネルギが上位10%以内にある範囲である。
続いて、制御部8は、特定された範囲K内にある各走査水準に対応付けて記憶されたEUV光センサ43の各計測結果についての加重平均値を計算する。そして、制御部8は、図6に示されるように、この加重平均値に最も近いEUV光センサ43の計測結果が取得された走査水準Aを特定する。
続いて、制御部8は、図9に示されるように、特定された走査水準Aを中心としてX軸に沿って配列された複数の走査水準と、特定された走査水準Aを中心としてY軸に沿って配列された複数の走査水準とを特定する。
続いて、制御部8は、特定された範囲K内にある各走査水準に対応付けて記憶されたEUV光センサ43の各計測結果についての加重平均値を計算する。そして、制御部8は、図6に示されるように、この加重平均値に最も近いEUV光センサ43の計測結果が取得された走査水準Aを特定する。
続いて、制御部8は、図9に示されるように、特定された走査水準Aを中心としてX軸に沿って配列された複数の走査水準と、特定された走査水準Aを中心としてY軸に沿って配列された複数の走査水準とを特定する。
続いて、制御部8は、図10に示されるように、走査水準Aを中心としてX軸に沿って配列された複数の走査水準に対応付けて記憶されたEUV光277の重心位置のX軸座標成分における評価値を特定する。加えて、制御部8は、図11に示されるように、走査水準Aを中心としてY軸に沿って配列された複数の走査水準に対応付けて記憶されたEUV光277の重心位置のY軸座標成分における評価値を特定する。
そして、制御部8は、図12の実線で示されるように、図10のように特定された評価値から、走査水準Aを中心としX軸に沿った方向においてのEUV光277の重心位置の評価値の分布を求める。加えて、制御部8は、図13の実線で示されるように、図11のように特定された評価値から、走査水準Aを中心としY軸に沿った方向においてのEUV光277の重心位置の評価値の分布を求める。
そして、制御部8は、図12の実線で示されるように、図10のように特定された評価値から、走査水準Aを中心としX軸に沿った方向においてのEUV光277の重心位置の評価値の分布を求める。加えて、制御部8は、図13の実線で示されるように、図11のように特定された評価値から、走査水準Aを中心としY軸に沿った方向においてのEUV光277の重心位置の評価値の分布を求める。
EUV光277の重心位置の評価値の各分布は、それぞれ図12及び図13の実線で示されるように、走査水準A及びその付近の位置においてそれぞれ線形的に変化し、走査水準Aから離れた位置においてそれぞれ非線形的に変化する。EUV光277の重心位置の評価値の分布が非線形的に変化する部分は、パルスレーザ光31の照射位置が適切な位置から外れ、比較的大きなシューティングずれが発生する照射位置と考えられる。
そこで、制御部8は、図12及び図13の各破線で示されるように、EUV光277の重心位置の評価値の各分布を、それぞれ3次関数でフィッティングする。そして、制御部8は、フィッティングされたそれぞれの3次関数が示す3次曲線における各変曲点に対応する位置を、目標重心位置に決定する。すなわち、制御部8は、図12の破線で示された3次曲線の変曲点に対応する位置を、目標重心位置のX軸座標成分に決定する。制御部8は、図13の破線で示された3次曲線の変曲点に対応する位置を、目標重心位置のY軸座標成分に決定する。
或いは、制御部8は、EUV光277の重心位置の評価値の各分布を、それぞれ1次関数でフィッティングしてもよい。そして、制御部8は、フィッティングされたそれぞれの1次関数が示す線分における各中点に対応する位置を、目標重心位置のX軸及びY軸座標成分に決定してもよい。
或いは、制御部8は、EUV光277の重心位置の評価値の各分布における最大値及び最小値を特定してもよい。そして、制御部8は、特定されたそれぞれの最大値及び最小値における各平均値に対応する位置を、目標重心位置のX軸及びY軸座標成分に決定してもよい。
そこで、制御部8は、図12及び図13の各破線で示されるように、EUV光277の重心位置の評価値の各分布を、それぞれ3次関数でフィッティングする。そして、制御部8は、フィッティングされたそれぞれの3次関数が示す3次曲線における各変曲点に対応する位置を、目標重心位置に決定する。すなわち、制御部8は、図12の破線で示された3次曲線の変曲点に対応する位置を、目標重心位置のX軸座標成分に決定する。制御部8は、図13の破線で示された3次曲線の変曲点に対応する位置を、目標重心位置のY軸座標成分に決定する。
或いは、制御部8は、EUV光277の重心位置の評価値の各分布を、それぞれ1次関数でフィッティングしてもよい。そして、制御部8は、フィッティングされたそれぞれの1次関数が示す線分における各中点に対応する位置を、目標重心位置のX軸及びY軸座標成分に決定してもよい。
或いは、制御部8は、EUV光277の重心位置の評価値の各分布における最大値及び最小値を特定してもよい。そして、制御部8は、特定されたそれぞれの最大値及び最小値における各平均値に対応する位置を、目標重心位置のX軸及びY軸座標成分に決定してもよい。
また、制御部8は、図9に示されるように、走査水準Aを中心としてX軸に沿って配列された複数の走査水準に対応付けて記憶されたEUV光センサ43の計測結果を特定する。加えて、制御部8は、図9に示されるように、走査水準Aを中心としてY軸に沿って配列された複数の走査水準に対応付けて記憶されたEUV光センサ43の計測結果を特定する。
そして、制御部8は、図12の太い一点鎖線で示されるように、図9のように特定されたEUV光センサ43の計測結果から、走査水準Aを中心としX軸に沿った方向においてのEUV光277のエネルギ分布を求める。加えて、制御部8は、図13の太い一点鎖線で示されるように、図9のように特定されたEUV光センサ43の計測結果から、走査水準Aを中心としY軸に沿った方向においてのEUV光277のエネルギ分布を求める。
そして、制御部8は、図12及び図13のそれぞれの細い一点鎖線で示されるように、EUV光277の各エネルギ分布を、それぞれ2次関数又はガウス関数でフィッティングする。
そして、制御部8は、図12の太い一点鎖線で示されるように、図9のように特定されたEUV光センサ43の計測結果から、走査水準Aを中心としX軸に沿った方向においてのEUV光277のエネルギ分布を求める。加えて、制御部8は、図13の太い一点鎖線で示されるように、図9のように特定されたEUV光センサ43の計測結果から、走査水準Aを中心としY軸に沿った方向においてのEUV光277のエネルギ分布を求める。
そして、制御部8は、図12及び図13のそれぞれの細い一点鎖線で示されるように、EUV光277の各エネルギ分布を、それぞれ2次関数又はガウス関数でフィッティングする。
第1実施形態のEUV光生成装置1の他の動作については、比較例のEUV光生成装置1と同様である。
[3.4 作用効果]
第1実施形態に係る制御部8は、EUV光重心制御を実行するにあたって、その都度、EUV光277の重心位置における目標重心位置を較正し得る。すなわち、制御部8は、検出感度や汚染のされ方等の影響でEUV光センサ43の計測精度が安定していなくても、その計測精度を考慮した最適な位置に目標重心位置を較正し得る。
それにより、第1実施形態のEUV光生成装置1は、適切なEUV光重心制御を恒常的に実行し得るため、パルスレーザ光31の照射位置を適切な位置に制御し得る。
その結果、第1実施形態のEUV光生成装置1は、シューティングずれを抑制し得るため、EUV光277の性能劣化を抑制し得る。
第1実施形態に係る制御部8は、EUV光重心制御を実行するにあたって、その都度、EUV光277の重心位置における目標重心位置を較正し得る。すなわち、制御部8は、検出感度や汚染のされ方等の影響でEUV光センサ43の計測精度が安定していなくても、その計測精度を考慮した最適な位置に目標重心位置を較正し得る。
それにより、第1実施形態のEUV光生成装置1は、適切なEUV光重心制御を恒常的に実行し得るため、パルスレーザ光31の照射位置を適切な位置に制御し得る。
その結果、第1実施形態のEUV光生成装置1は、シューティングずれを抑制し得るため、EUV光277の性能劣化を抑制し得る。
[4.第2実施形態]
図6乃至図8及び図14乃至図18を用いて、第2実施形態のEUV光生成装置1について説明する。
第2実施形態のEUV光生成装置1は、第1実施形態のEUV光生成装置1と同様の構成を備える。
但し、第2実施形態のEUV光生成装置1は、第1実施形態のEUV光生成装置1に対して、EUV光277の重心位置における目標重心位置を決定する処理に関する制御部8の動作が異なる。
第2実施形態のEUV光生成装置1の構成及び動作において、第1実施形態のEUV光生成装置1と同様の構成及び動作については説明を省略する。
図6乃至図8及び図14乃至図18を用いて、第2実施形態のEUV光生成装置1について説明する。
第2実施形態のEUV光生成装置1は、第1実施形態のEUV光生成装置1と同様の構成を備える。
但し、第2実施形態のEUV光生成装置1は、第1実施形態のEUV光生成装置1に対して、EUV光277の重心位置における目標重心位置を決定する処理に関する制御部8の動作が異なる。
第2実施形態のEUV光生成装置1の構成及び動作において、第1実施形態のEUV光生成装置1と同様の構成及び動作については説明を省略する。
図14は、図6に示された走査水準Bを中心としてX軸及びY軸に沿って配列された複数の走査水準と、これらの走査水準に対応付けて記憶されたEUV光センサ43の計測結果とを示す。図15は、図6に示された走査水準B中心としてX軸に沿って配列された複数の走査水準と、これらの走査水準に対応付けて記憶されたEUV光277の重心位置のX軸座標成分における評価値とを示す。図16は、図6に示された走査水準Bを中心としてY軸に沿って配列された複数の走査水準と、これらの走査水準に対応付けて記憶されたEUV光277の重心位置のY軸座標成分における評価値とを示す。図17は、走査水準Bを中心としX軸に沿った方向においてのEUV光277のエネルギ分布と重心位置の評価値の分布とを示す。図18は、走査水準Bを中心としY軸に沿った方向においてのEUV光277のエネルギ分布と重心位置の評価値の分布とを示す。
第2実施形態に係る制御部8は、図4のステップS7において作成された分布図に基づいて次のような処理を行うことによって、目標重心位置を決定する。
具体的には、制御部8は、図6に示されるように、設定された走査水準群に含まれる複数の走査水準のそれぞれで取得されたEUV光センサ43の計測結果のうちで、EUV光277のエネルギが最大である走査水準Bを特定する。
続いて、制御部8は、図14に示されるように、特定された走査水準Bを中心としてX軸に沿って配列された複数の走査水準と、特定された走査水準Bを中心としてY軸に沿って配列された複数の走査水準とを特定する。
続いて、制御部8は、図14に示されるように、特定された走査水準Bを中心としてX軸に沿って配列された複数の走査水準と、特定された走査水準Bを中心としてY軸に沿って配列された複数の走査水準とを特定する。
続いて、制御部8は、図15に示されるように、走査水準Bを中心としてX軸に沿って配列された複数の走査水準に対応付けて記憶されたEUV光277の重心位置のX軸座標成分における評価値を特定する。加えて、制御部8は、図16に示されるように、走査水準Bを中心としてY軸に沿って配列された複数の走査水準に対応付けて記憶されたEUV光277の重心位置のY軸座標成分における評価値を特定する。
そして、制御部8は、図17の実線で示されるように、図15のように特定された評価値から、走査水準Bを中心としX軸に沿った方向においてのEUV光277の重心位置の評価値の分布を求める。加えて、制御部8は、図18の実線で示されるように、図16のように特定された評価値から、走査水準Bを中心としY軸に沿った方向においてのEUV光277の重心位置の評価値の分布を求める。
そして、制御部8は、図17の実線で示されるように、図15のように特定された評価値から、走査水準Bを中心としX軸に沿った方向においてのEUV光277の重心位置の評価値の分布を求める。加えて、制御部8は、図18の実線で示されるように、図16のように特定された評価値から、走査水準Bを中心としY軸に沿った方向においてのEUV光277の重心位置の評価値の分布を求める。
第2実施形態に係る制御部8は、第1実施形態と同様に、EUV光277の重心位置の評価値の各分布を、図17及び図18の各破線で示されるように、それぞれ3次関数でフィッティングする。そして、制御部8は、フィッティングされたそれぞれの3次関数が示す3次曲線における各変曲点に対応する位置を、目標重心位置に決定する。
或いは、制御部8は、第1実施形態と同様に、EUV光277の重心位置の評価値の各分布を、それぞれ1次関数でフィッティングしてもよい。そして、制御部8は、フィッティングされたそれぞれの1次関数が示す線分における各中点に対応する位置を、目標重心位置に決定してもよい。
或いは、制御部8は、第1実施形態と同様に、EUV光277の重心位置の評価値の各分布における最大値及び最小値を特定してもよい。そして、制御部8は、特定されたそれぞれの最大値及び最小値における各平均値に対応する位置を、目標重心位置に決定してもよい。
或いは、制御部8は、第1実施形態と同様に、EUV光277の重心位置の評価値の各分布を、それぞれ1次関数でフィッティングしてもよい。そして、制御部8は、フィッティングされたそれぞれの1次関数が示す線分における各中点に対応する位置を、目標重心位置に決定してもよい。
或いは、制御部8は、第1実施形態と同様に、EUV光277の重心位置の評価値の各分布における最大値及び最小値を特定してもよい。そして、制御部8は、特定されたそれぞれの最大値及び最小値における各平均値に対応する位置を、目標重心位置に決定してもよい。
第2実施形態のEUV光生成装置1の他の動作については、第1実施形態のEUV光生成装置1と同様である。
第2実施形態のEUV光生成装置1は、第1実施形態と同様に、EUV光277の重心位置における目標重心位置を都度較正し、適切なEUV光重心制御を恒常的に実行し得る。
その結果、第2実施形態のEUV光生成装置1は、第1実施形態と同様に、シューティングずれを抑制し、EUV光277の性能劣化を抑制し得る。
その結果、第2実施形態のEUV光生成装置1は、第1実施形態と同様に、シューティングずれを抑制し、EUV光277の性能劣化を抑制し得る。
[5.第3実施形態]
図19及び図20を用いて、第3実施形態のEUV光生成装置1について説明する。
第3実施形態のEUV光生成装置1では、プラズマ生成領域R1に供給された1つのターゲット27に対して複数のパルスレーザ光31が照射される。そのために、第3実施形態に係るレーザ装置3は、第1又は第2実施形態に係るレーザ装置3と異なる構成を備える。
更に、第3実施形態のEUV光生成装置1は、第1又は第2実施形態のEUV光生成装置1に対して、レーザ光伝送光学系33及び照射位置調節部7の構成が異なると共に、遅延回路81が追加された構成を備える。
また、第3実施形態のEUV光生成装置1は、第1又は第2実施形態のEUV光生成装置1に対して、目標重心位置の較正処理に関する制御部8の動作が異なる。
第3実施形態のEUV光生成装置1の構成及び動作において、第1又は第2実施形態のEUV光生成装置1と同様の構成及び動作については説明を省略する。
図19及び図20を用いて、第3実施形態のEUV光生成装置1について説明する。
第3実施形態のEUV光生成装置1では、プラズマ生成領域R1に供給された1つのターゲット27に対して複数のパルスレーザ光31が照射される。そのために、第3実施形態に係るレーザ装置3は、第1又は第2実施形態に係るレーザ装置3と異なる構成を備える。
更に、第3実施形態のEUV光生成装置1は、第1又は第2実施形態のEUV光生成装置1に対して、レーザ光伝送光学系33及び照射位置調節部7の構成が異なると共に、遅延回路81が追加された構成を備える。
また、第3実施形態のEUV光生成装置1は、第1又は第2実施形態のEUV光生成装置1に対して、目標重心位置の較正処理に関する制御部8の動作が異なる。
第3実施形態のEUV光生成装置1の構成及び動作において、第1又は第2実施形態のEUV光生成装置1と同様の構成及び動作については説明を省略する。
[5.1 構成]
図19は、第3実施形態のEUV光生成装置1を備えるEUV光生成システム11の構成を説明するための図を示す。
第3実施形態に係るレーザ装置3は、プラズマ生成領域R1に供給された1つのターゲット27を照射するために複数のパルスレーザ光を出力する。レーザ装置3は、この複数のパルスレーザ光として、例えば、第1プリパルスレーザ光31b、第2プリパルスレーザ光31c及びメインパルスレーザ光31aの3つのパルスレーザ光をこの順番で出力する。
レーザ装置3は、メインパルスレーザ装置3aと、第1プリパルスレーザ装置3bと、第2プリパルスレーザ装置3cとを備える。
図19は、第3実施形態のEUV光生成装置1を備えるEUV光生成システム11の構成を説明するための図を示す。
第3実施形態に係るレーザ装置3は、プラズマ生成領域R1に供給された1つのターゲット27を照射するために複数のパルスレーザ光を出力する。レーザ装置3は、この複数のパルスレーザ光として、例えば、第1プリパルスレーザ光31b、第2プリパルスレーザ光31c及びメインパルスレーザ光31aの3つのパルスレーザ光をこの順番で出力する。
レーザ装置3は、メインパルスレーザ装置3aと、第1プリパルスレーザ装置3bと、第2プリパルスレーザ装置3cとを備える。
メインパルスレーザ装置3aは、メインパルスレーザ光31aを出力するレーザ装置3である。メインパルスレーザ装置3aは、CO2レーザ装置等のガスレーザ装置である。
メインパルスレーザ光31aは、プラズマ275を生成してEUV光277を生成するためにターゲット27に照射されるレーザ光である。
メインパルスレーザ光31aは、プラズマ275を生成してEUV光277を生成するためにターゲット27に照射されるレーザ光である。
第1及び第2プリパルスレーザ装置3b及び3cは、それぞれ、第1及び第2プリパルスレーザ光31b及び31cを出力するレーザ装置3である。第1及び第2プリパルスレーザ装置3b及び3cのそれぞれは、YAGレーザ装置等の固体レーザ装置である。
第1及び第2プリパルスレーザ光31b及び31cのそれぞれは、メインパルスレーザ光31aがターゲット27に照射される前段階として、ターゲット27に照射されるレーザ光である。
第1及び第2プリパルスレーザ光31b及び31cの波長は、互いに異なってもよい。
なお、第1プリパルスレーザ光31b、第2プリパルスレーザ光31c及びメインパルスレーザ光31aを総称して、パルスレーザ光31ともいう。
第1及び第2プリパルスレーザ光31b及び31cのそれぞれは、メインパルスレーザ光31aがターゲット27に照射される前段階として、ターゲット27に照射されるレーザ光である。
第1及び第2プリパルスレーザ光31b及び31cの波長は、互いに異なってもよい。
なお、第1プリパルスレーザ光31b、第2プリパルスレーザ光31c及びメインパルスレーザ光31aを総称して、パルスレーザ光31ともいう。
第3実施形態に係るレーザ光伝送光学系33は、高反射ミラー341と、ミラー342と、第1ミラー光学系343と、ビームコンバイナ351とを含む。
高反射ミラー341は、メインパルスレーザ装置3aから出力されたメインパルスレーザ光31aをビームコンバイナ351に向けて反射するミラーである。
ミラー342は、第1プリパルスレーザ装置3bから出力された第1プリパルスレーザ光31bをビームコンバイナ351に向けて反射するミラーである。加えて、ミラー342は、第1ミラー光学系343で反射された第2プリパルスレーザ光31cをビームコンバイナ351に向けて透過させるミラーである。
第1ミラー光学系343は、第2プリパルスレーザ装置3cから出力された第2プリパルスレーザ光31cを、第1プリパルスレーザ光31bと略同一の光路軸でビームコンバイナ351に導入する光学系である。
第1ミラー光学系343は、レーザ光集光光学系22に入射する前の第2プリパルスレーザ光31cの光路上に配置される。
第1ミラー光学系343は、高反射ミラー344と、ステージ345とを含む。
高反射ミラー344は、第2プリパルスレーザ装置3cから出力された第2プリパルスレーザ光31cを、ミラー342を介して、ビームコンバイナ351に向けて反射するミラーである。
高反射ミラー344は、ステージ345に搭載される。
ステージ345は、高反射ミラー344の位置及び姿勢の少なくとも1つを調節する機構である。ステージ345は、高反射ミラー344で反射された第2プリパルスレーザ光31cの光路軸が、ミラー342で反射された第1プリパルスレーザ光31bの光路軸と略同一となるよう、高反射ミラー344の位置及び姿勢を調節する機構である。
ステージ345の駆動は、制御部8によって制御される。
第1ミラー光学系343は、レーザ光集光光学系22に入射する前の第2プリパルスレーザ光31cの光路上に配置される。
第1ミラー光学系343は、高反射ミラー344と、ステージ345とを含む。
高反射ミラー344は、第2プリパルスレーザ装置3cから出力された第2プリパルスレーザ光31cを、ミラー342を介して、ビームコンバイナ351に向けて反射するミラーである。
高反射ミラー344は、ステージ345に搭載される。
ステージ345は、高反射ミラー344の位置及び姿勢の少なくとも1つを調節する機構である。ステージ345は、高反射ミラー344で反射された第2プリパルスレーザ光31cの光路軸が、ミラー342で反射された第1プリパルスレーザ光31bの光路軸と略同一となるよう、高反射ミラー344の位置及び姿勢を調節する機構である。
ステージ345の駆動は、制御部8によって制御される。
ビームコンバイナ351は、第1及び第2プリパルスレーザ光31b及び31cとメインパルスレーザ光31aとを略同一の光路軸に結合してチャンバ2内に導入する光学系である。
ビームコンバイナ351は、ダイクロイックミラー352と、第2ミラー光学系353とを含む。
ダイクロイックミラー352は、ミラー342で反射された第1プリパルスレーザ光31b及びミラー342を透過した第2プリパルスレーザ光31cを、ウインドウ215に向けて反射するミラーである。ダイクロイックミラー352は、第2ミラー光学系353で反射されたメインパルスレーザ光31aをウインドウ215に向けて透過させるミラーである。
第2ミラー光学系353は、高反射ミラー341で反射されたメインパルスレーザ光31aを、ダイクロイックミラー352で反射された第1及び第2プリパルスレーザ光31b及び31cと略同一の光路軸でチャンバ2内に導入する光学系である。
第2ミラー光学系353は、レーザ光集光光学系22に入射する前のメインパルスレーザ光31aの光路上に配置される。
第2ミラー光学系353は、高反射ミラー354と、ステージ355とを含む。
高反射ミラー354は、高反射ミラー341で反射されたメインパルスレーザ光31aを、ダイクロイックミラー352を介して、ウインドウ215に向けて反射するミラーである。
高反射ミラー354は、ステージ355に搭載される。
ステージ355は、高反射ミラー354の位置及び姿勢の少なくとも1つを調節する機構である。ステージ355は、高反射ミラー354で反射されたメインパルスレーザ光31aの光路軸が、ダイクロイックミラー352で反射された第1プリパルスレーザ光31bの光路軸と略同一となるよう、高反射ミラー354の位置及び姿勢を調節する機構である。
ステージ355の駆動は、制御部8によって制御される。
ビームコンバイナ351は、ダイクロイックミラー352と、第2ミラー光学系353とを含む。
ダイクロイックミラー352は、ミラー342で反射された第1プリパルスレーザ光31b及びミラー342を透過した第2プリパルスレーザ光31cを、ウインドウ215に向けて反射するミラーである。ダイクロイックミラー352は、第2ミラー光学系353で反射されたメインパルスレーザ光31aをウインドウ215に向けて透過させるミラーである。
第2ミラー光学系353は、高反射ミラー341で反射されたメインパルスレーザ光31aを、ダイクロイックミラー352で反射された第1及び第2プリパルスレーザ光31b及び31cと略同一の光路軸でチャンバ2内に導入する光学系である。
第2ミラー光学系353は、レーザ光集光光学系22に入射する前のメインパルスレーザ光31aの光路上に配置される。
第2ミラー光学系353は、高反射ミラー354と、ステージ355とを含む。
高反射ミラー354は、高反射ミラー341で反射されたメインパルスレーザ光31aを、ダイクロイックミラー352を介して、ウインドウ215に向けて反射するミラーである。
高反射ミラー354は、ステージ355に搭載される。
ステージ355は、高反射ミラー354の位置及び姿勢の少なくとも1つを調節する機構である。ステージ355は、高反射ミラー354で反射されたメインパルスレーザ光31aの光路軸が、ダイクロイックミラー352で反射された第1プリパルスレーザ光31bの光路軸と略同一となるよう、高反射ミラー354の位置及び姿勢を調節する機構である。
ステージ355の駆動は、制御部8によって制御される。
第3実施形態に係る照射位置調節部7は、第1実施形態と同様に、レーザ光集光光学系22を用いて構成される。或いは、照射位置調節部7は、第1及び第2ミラー光学系343及び353を用いて構成される。或いは、照射位置調節部7は、第1及び第2ミラー光学系343及び353と、レーザ光集光光学系22とを用いて構成される。
第3実施形態に係る遅延回路81は、制御部8によって設定された遅延時間に応じて、レーザ装置3からのパルスレーザ光31の出力タイミングを調節する回路である。
第3実施形態のEUV光生成装置1の他の構成については、第1又は第2実施形態のEUV光生成装置1と同様である。
[5.2 動作]
第3実施形態のEUV光生成装置1の動作について説明する。
まず、第3実施形態に係るレーザ装置3の動作を制御する制御部8及び遅延回路81の動作について説明する。
第3実施形態に係る制御部8は、遅延時間Td1乃至Td3を遅延回路81に設定する。
遅延時間Td1は、第1プリパルスレーザ光31bがプラズマ生成領域R1に集光されるタイミングを、ターゲット27がプラズマ生成領域R1に供給されるタイミングに略一致させるための時間である。
遅延時間Td2は、第2プリパルスレーザ光31cがプラズマ生成領域R1に集光されるタイミングを、第1プリパルスレーザ光31bが照射されたターゲット27が適切に拡散するタイミングに略一致させるための時間である。
遅延時間Td3は、メインパルスレーザ光31aがプラズマ生成領域R1に集光されるタイミングを、第2プリパルスレーザ光31cが照射されたターゲット27が適切に拡散するタイミングに略一致させるための時間である。
第3実施形態のEUV光生成装置1の動作について説明する。
まず、第3実施形態に係るレーザ装置3の動作を制御する制御部8及び遅延回路81の動作について説明する。
第3実施形態に係る制御部8は、遅延時間Td1乃至Td3を遅延回路81に設定する。
遅延時間Td1は、第1プリパルスレーザ光31bがプラズマ生成領域R1に集光されるタイミングを、ターゲット27がプラズマ生成領域R1に供給されるタイミングに略一致させるための時間である。
遅延時間Td2は、第2プリパルスレーザ光31cがプラズマ生成領域R1に集光されるタイミングを、第1プリパルスレーザ光31bが照射されたターゲット27が適切に拡散するタイミングに略一致させるための時間である。
遅延時間Td3は、メインパルスレーザ光31aがプラズマ生成領域R1に集光されるタイミングを、第2プリパルスレーザ光31cが照射されたターゲット27が適切に拡散するタイミングに略一致させるための時間である。
制御部8は、ターゲット検出領域R2の通過タイミングで生成されたターゲット検出信号を、そのまま遅延回路81に送信する。
遅延回路81は、ターゲット検出信号を受信したタイミングから遅延時間Td1だけ遅延したタイミングで、第1プリパルスレーザ光31bを出力する契機を与える第1トリガ信号を第1プリパルスレーザ装置3bに送信する。すなわち、遅延回路81は、ターゲット検出領域R2の通過タイミングに遅延時間Td1を付加したタイミングで、第1プリパルスレーザ装置3bから第1プリパルスレーザ光31bを出力させる。
それにより、第1プリパルスレーザ装置3bから出力された第1プリパルスレーザ光31bは、プラズマ生成領域R1に供給されたターゲット27に照射される。第1プリパルスレーザ光31bが照射されたターゲット27は、マイクロドロップレット及びクラスタ等の微粒子がミスト状に拡散した状態となる。
それにより、第1プリパルスレーザ装置3bから出力された第1プリパルスレーザ光31bは、プラズマ生成領域R1に供給されたターゲット27に照射される。第1プリパルスレーザ光31bが照射されたターゲット27は、マイクロドロップレット及びクラスタ等の微粒子がミスト状に拡散した状態となる。
遅延回路81は、第1プリパルスレーザ光31bと同様に、ターゲット検出領域R2の通過タイミングに遅延時間Td2を付加したタイミングで、第2プリパルスレーザ装置3cから第2プリパルスレーザ光31cを出力させる。
それにより、第2プリパルスレーザ装置3cから出力された第2プリパルスレーザ光31cは、第1プリパルスレーザ光31bが照射され適切に拡散したターゲット27に照射される。第2プリパルスレーザ光31cが照射されたターゲット27は、更に微細になった微粒子と、ターゲット27の蒸気とを含んで拡散した状態となる。第2プリパルスレーザ光31cが照射されたターゲット27は、ターゲット27の一部がプラズマ化してイオン又は中性粒子を含むプリプラズマを含んた状態であってもよい。
それにより、第2プリパルスレーザ装置3cから出力された第2プリパルスレーザ光31cは、第1プリパルスレーザ光31bが照射され適切に拡散したターゲット27に照射される。第2プリパルスレーザ光31cが照射されたターゲット27は、更に微細になった微粒子と、ターゲット27の蒸気とを含んで拡散した状態となる。第2プリパルスレーザ光31cが照射されたターゲット27は、ターゲット27の一部がプラズマ化してイオン又は中性粒子を含むプリプラズマを含んた状態であってもよい。
遅延回路81は、第1及び第2プリパルスレーザ光31b及び31cと同様に、ターゲット検出領域R2の通過タイミングに遅延時間Td3を付加したタイミングで、メインパルスレーザ装置3aからメインパルスレーザ光31aを出力させる。
それにより、メインパルスレーザ装置3aから出力されたメインパルスレーザ光31aは、第2プリパルスレーザ光31cが照射され適切に拡散したターゲット27に照射される。メインパルスレーザ光31aが照射されたターゲット27は、プラズマ化して、EUV光277を含む放射光276を放射する。
第2プリパルスレーザ光31cが照射されたターゲット27に対するメインパルスレーザ光31aの照射は、プラズマ生成領域R1に供給されたターゲット27に対するメインパルスレーザ光31aの照射に比べて、EUV光277の生成効率を高め得る。
それにより、メインパルスレーザ装置3aから出力されたメインパルスレーザ光31aは、第2プリパルスレーザ光31cが照射され適切に拡散したターゲット27に照射される。メインパルスレーザ光31aが照射されたターゲット27は、プラズマ化して、EUV光277を含む放射光276を放射する。
第2プリパルスレーザ光31cが照射されたターゲット27に対するメインパルスレーザ光31aの照射は、プラズマ生成領域R1に供給されたターゲット27に対するメインパルスレーザ光31aの照射に比べて、EUV光277の生成効率を高め得る。
続いて、図20を用いて、第3実施形態に係る制御部8が実行する目標重心位置の較正処理について説明する。
図20は、第3実施形態に係る制御部8によって実行される目標重心位置の較正処理を説明するためのフローチャートを示す。
図20は、第3実施形態に係る制御部8によって実行される目標重心位置の較正処理を説明するためのフローチャートを示す。
ステップS11において、制御部8は、図4に示されたステップS1と同様の処理を実行する。
ステップS12において、制御部8は、設定された走査水準群に従って、第1及び第2プリパルス並びにメインパルスレーザ光31a乃至31cの照射位置が走査されるよう、照射位置調節部7を制御する。
具体的には、制御部8は、第1及び第2プリパルス並びにメインパルスレーザ光31a乃至31cの照射位置が走査されるよう、レーザ光集光光学系22を制御する。この際、制御部8は、レーザ光集光光学系22に加えて、第1及び第2ミラー光学系343及び353を制御してもよい。
具体的には、制御部8は、第1及び第2プリパルス並びにメインパルスレーザ光31a乃至31cの照射位置が走査されるよう、レーザ光集光光学系22を制御する。この際、制御部8は、レーザ光集光光学系22に加えて、第1及び第2ミラー光学系343及び353を制御してもよい。
ステップS13において、制御部8は、第1乃至第3トリガ信号を第1及び第2プリパルス並びにメインパルスレーザ装置3a乃至3cにそれぞれ送信し、第1及び第2プリパルス並びにメインパルスレーザ光31a乃至31cをターゲット27に照射させる。
ステップS14乃至S19において、制御部8は、図4に示されたステップS4乃至S9と同様の処理を実行する。
第3実施形態のEUV光生成装置1の他の動作については、第1又は第2実施形態のEUV光生成装置1と同様である。
[5.3 作用効果]
第3実施形態のEUV光生成装置1は、パルスレーザ光31が複数のパルスレーザ光から構成されていても、第1又は第2実施形態と同様に、EUV光277の重心位置における目標重心位置を都度較正し、適切なEUV光重心制御を恒常的に実行し得る。
その結果、第3実施形態のEUV光生成装置1は、第1又は第2実施形態と同様に、シューティングずれを抑制し、EUV光277の性能劣化を抑制し得る。
第3実施形態のEUV光生成装置1は、パルスレーザ光31が複数のパルスレーザ光から構成されていても、第1又は第2実施形態と同様に、EUV光277の重心位置における目標重心位置を都度較正し、適切なEUV光重心制御を恒常的に実行し得る。
その結果、第3実施形態のEUV光生成装置1は、第1又は第2実施形態と同様に、シューティングずれを抑制し、EUV光277の性能劣化を抑制し得る。
[6.第4実施形態]
図21を用いて、第4実施形態のEUV光生成装置1について説明する。
第4実施形態のEUV光生成装置1は、第1、第2又は第3実施形態のEUV光生成装置1と同様の構成を備える。
第4実施形態のEUV光生成装置1は、第1、第2又は第3実施形態のEUV光生成装置1に対して、目標重心位置の較正処理に関する制御部8の動作が異なる。
第4実施形態のEUV光生成装置1の構成及び動作において、第1、第2又は第3実施形態のEUV光生成装置1と同様の構成及び動作については説明を省略する。
図21を用いて、第4実施形態のEUV光生成装置1について説明する。
第4実施形態のEUV光生成装置1は、第1、第2又は第3実施形態のEUV光生成装置1と同様の構成を備える。
第4実施形態のEUV光生成装置1は、第1、第2又は第3実施形態のEUV光生成装置1に対して、目標重心位置の較正処理に関する制御部8の動作が異なる。
第4実施形態のEUV光生成装置1の構成及び動作において、第1、第2又は第3実施形態のEUV光生成装置1と同様の構成及び動作については説明を省略する。
第4実施形態に係る制御部8は、第1、第2又は第3実施形態と同様に、EUV光重心制御を実行する。
第4実施形態に係る制御部8は、所定事象が発生した際に、目標重心位置の較正処理を実行する。すなわち、制御部8が目標重心位置の較正処理を実行する時期は、所定事象が発生した際である。
所定事象とは、EUV光生成装置1が起動すること、EUV光277が所定パルス数だけ生成されたこと、EUV光277の性能が劣化したこと、及び、EUV光生成装置1が起動してから所定時間だけ経過したこと、のうちの少なくとも1つの事象である。
所定パルス数は、例えば、0.5Bpls(Billion pulse)以上5Bpls以下の範囲に含まれるパルス数である。所定パルス数は、例えば0.5Bplsである。所定時間は、例えば1日である。EUV光277の性能は、上述のように、EUV光277のエネルギ及びEUV光277のエネルギのばらつきの少なくとも1つである。
第4実施形態に係る制御部8は、所定事象が発生した際に、目標重心位置の較正処理を実行する。すなわち、制御部8が目標重心位置の較正処理を実行する時期は、所定事象が発生した際である。
所定事象とは、EUV光生成装置1が起動すること、EUV光277が所定パルス数だけ生成されたこと、EUV光277の性能が劣化したこと、及び、EUV光生成装置1が起動してから所定時間だけ経過したこと、のうちの少なくとも1つの事象である。
所定パルス数は、例えば、0.5Bpls(Billion pulse)以上5Bpls以下の範囲に含まれるパルス数である。所定パルス数は、例えば0.5Bplsである。所定時間は、例えば1日である。EUV光277の性能は、上述のように、EUV光277のエネルギ及びEUV光277のエネルギのばらつきの少なくとも1つである。
図21は、第4実施形態に係る制御部8が目標重心位置の較正処理を実行する時期を説明するためのフローチャートを示す。
図21には、上述の所定事象のうち、EUV光生成装置1が起動すること、及び、EUV光277が所定パルス数だけ生成されたことの2つの事象が発生した際に、制御部8が目標重心位置の較正処理を実行することが代表して示されている。
制御部8は、EUV光生成装置1が起動する際、以下の処理を行う。
図21には、上述の所定事象のうち、EUV光生成装置1が起動すること、及び、EUV光277が所定パルス数だけ生成されたことの2つの事象が発生した際に、制御部8が目標重心位置の較正処理を実行することが代表して示されている。
制御部8は、EUV光生成装置1が起動する際、以下の処理を行う。
ステップS21において、制御部8は、目標重心位置の較正処理を実行する旨を露光装置9に通知する。
ステップS22において、制御部8は、目標重心位置の較正処理を実行する。
目標重心位置の較正処理の内容については、第1、第2又は第3実施形態に係る較正処理と同様の処理である。
すなわち、制御部8は、互いに位置が異なる複数の走査水準に従ってパルスレーザ光31の照射位置を走査して、複数の走査水準のそれぞれでEUV光センサ43の計測結果を取得する。続いて、制御部8は、取得されたEUV光センサ43の計測結果から、複数の走査水準のそれぞれでのEUV光277の重心位置の評価値を特定する。続いて、制御部8は、取得されたEUV光センサ43の計測結果と、特定された重心位置の評価値とに基づいて、EUV光277の重心位置における目標重心位置を較正する。
目標重心位置の較正処理の内容については、第1、第2又は第3実施形態に係る較正処理と同様の処理である。
すなわち、制御部8は、互いに位置が異なる複数の走査水準に従ってパルスレーザ光31の照射位置を走査して、複数の走査水準のそれぞれでEUV光センサ43の計測結果を取得する。続いて、制御部8は、取得されたEUV光センサ43の計測結果から、複数の走査水準のそれぞれでのEUV光277の重心位置の評価値を特定する。続いて、制御部8は、取得されたEUV光センサ43の計測結果と、特定された重心位置の評価値とに基づいて、EUV光277の重心位置における目標重心位置を較正する。
ステップS23において、制御部8は、目標重心位置の較正処理が終了した旨を露光装置9に通知する。
ステップS24において、制御部8は、生成されたEUV光277のパルス数をカウントする。
制御部8は、例えば、ターゲット検出信号を生成した回数をカウントすることによって、EUV光277のパルス数をカウントする。或いは、制御部8は、例えば、EUV光センサ43の計測結果を取得した回数をカウントすることにとって、EUV光277のパルス数をカウントしてもよい。
制御部8は、例えば、ターゲット検出信号を生成した回数をカウントすることによって、EUV光277のパルス数をカウントする。或いは、制御部8は、例えば、EUV光センサ43の計測結果を取得した回数をカウントすることにとって、EUV光277のパルス数をカウントしてもよい。
ステップS25において、制御部8は、EUV光277が所定パルス数だけ生成されたか否かを判定する。
所定パルス数は、上述のように、例えば、0.5Bpls(Billion pulse)以上5Bpls以下の範囲に含まれるパルス数である。所定パルス数は、例えば0.5Bplsである。
制御部8は、EUV光277が所定パルス数だけ生成されていなければ、ステップS24に移行する。一方、制御部8は、EUV光277が所定パルス数だけ生成されたならば、ステップS21に移行する。
所定パルス数は、上述のように、例えば、0.5Bpls(Billion pulse)以上5Bpls以下の範囲に含まれるパルス数である。所定パルス数は、例えば0.5Bplsである。
制御部8は、EUV光277が所定パルス数だけ生成されていなければ、ステップS24に移行する。一方、制御部8は、EUV光277が所定パルス数だけ生成されたならば、ステップS21に移行する。
制御部8は、上述の所定事象のうちの他の事象が発生した際も、図21と同様に目標重心位置の較正処理を実行し得る。
例えば、EUV光277の性能が劣化した際に目標重心位置の較正処理を実行する場合には、制御部8は、ステップS24において、EUV光センサ43の計測結果を取得する処理を実行すればよい。そして、制御部8は、ステップS25において、EUV光277のエネルギ及びEUV光277のエネルギのばらつきの少なくとも1つが許容範囲から外れたか否かを判定する処理を実行すればよい。
また、EUV光生成装置1が起動してから所定時間だけ経過した際に目標重心位置の較正処理を実行する場合には、制御部8は、ステップS24においてEUV光生成装置1の起動時からの経過時間をカウントする処理を実行すればよい。そして、制御部8は、ステップS25において、この経過時間が所定時間に達したか否かを判定する処理を実行すればよい。
例えば、EUV光277の性能が劣化した際に目標重心位置の較正処理を実行する場合には、制御部8は、ステップS24において、EUV光センサ43の計測結果を取得する処理を実行すればよい。そして、制御部8は、ステップS25において、EUV光277のエネルギ及びEUV光277のエネルギのばらつきの少なくとも1つが許容範囲から外れたか否かを判定する処理を実行すればよい。
また、EUV光生成装置1が起動してから所定時間だけ経過した際に目標重心位置の較正処理を実行する場合には、制御部8は、ステップS24においてEUV光生成装置1の起動時からの経過時間をカウントする処理を実行すればよい。そして、制御部8は、ステップS25において、この経過時間が所定時間に達したか否かを判定する処理を実行すればよい。
第4実施形態のEUV光生成装置1の他の動作については、第1、第2又は第3実施形態のEUV光生成装置1と同様である。
第4実施形態のEUV光生成装置1は、第1、第2又は第3実施形態と同様に、EUV光277の重心位置における目標重心位置を都度較正し、適切なEUV光重心制御を恒常的に実行し得る。
その結果、第4実施形態のEUV光生成装置1は、第1、第2又は第3実施形態と同様に、シューティングずれを抑制し、EUV光277の性能劣化を抑制し得る。
その結果、第4実施形態のEUV光生成装置1は、第1、第2又は第3実施形態と同様に、シューティングずれを抑制し、EUV光277の性能劣化を抑制し得る。
[7.第5実施形態]
次に図22乃至図31を用いて、第5実施形態のEUV光生成装置1について説明する。なお、この第5実施形態、並びに後述する第6実施形態及び第7実施形態のEUV光生成装置1においては、EUV光277はバースト発光する。
次に図22乃至図31を用いて、第5実施形態のEUV光生成装置1について説明する。なお、この第5実施形態、並びに後述する第6実施形態及び第7実施形態のEUV光生成装置1においては、EUV光277はバースト発光する。
[7.1 構成]
第5実施形態のEUV光生成装置1は、EUV光277をバースト発光させるために、図1に示されるレーザ装置3として、所定の高周波数でパルスレーザ光31を発生し得るレーザ装置が用いられる。また第5実施形態のEUV光生成装置1においては、EUV光277の重心位置を求める処理、および目標重心位置の較正処理が第1乃至第4実施形態における各処理と異なっている。制御部8は、これらの異なる処理を行い得る構成を備える。以上述べた3つの点以外、第5実施形態のEUV光生成装置1は、基本的に第1実施形態のEUV光生成装置1と同様に構成されてもよい。また、この第5実施形態、並びに後述する第6実施形態及び第7実施形態のEUV光生成装置1においては、第3実施形態のEUV光生成装置1と同様に、プリパルスによるターゲット照射を行う構成が適用されてもよい。
第5実施形態のEUV光生成装置1は、EUV光277をバースト発光させるために、図1に示されるレーザ装置3として、所定の高周波数でパルスレーザ光31を発生し得るレーザ装置が用いられる。また第5実施形態のEUV光生成装置1においては、EUV光277の重心位置を求める処理、および目標重心位置の較正処理が第1乃至第4実施形態における各処理と異なっている。制御部8は、これらの異なる処理を行い得る構成を備える。以上述べた3つの点以外、第5実施形態のEUV光生成装置1は、基本的に第1実施形態のEUV光生成装置1と同様に構成されてもよい。また、この第5実施形態、並びに後述する第6実施形態及び第7実施形態のEUV光生成装置1においては、第3実施形態のEUV光生成装置1と同様に、プリパルスによるターゲット照射を行う構成が適用されてもよい。
[7.2 動作]
図22は、この第5実施形態、並びに後述する第6実施形態及び第7実施形態のEUV光生成装置1においてなされるバースト発光の様子を概略的に示している。この図22に示される通り、「バースト1」、「バースト2」、「バースト3」・・・として示される各バースト発光期間は、所定の休止期間を間に置いて繰り返す。各バースト発光期間の縦線は、例えば図1に示されるEUV光277のエネルギを示している。つまり各バースト発光期間においては、高周波数でパルス状に発光する一まとまりのEUV光277が出力される。
図22は、この第5実施形態、並びに後述する第6実施形態及び第7実施形態のEUV光生成装置1においてなされるバースト発光の様子を概略的に示している。この図22に示される通り、「バースト1」、「バースト2」、「バースト3」・・・として示される各バースト発光期間は、所定の休止期間を間に置いて繰り返す。各バースト発光期間の縦線は、例えば図1に示されるEUV光277のエネルギを示している。つまり各バースト発光期間においては、高周波数でパルス状に発光する一まとまりのEUV光277が出力される。
本第5実施形態でも、制御部8が行う処理は、基本的に第1実施形態における処理と同様に、図4に示すフローチャートに従ってなされるが、いくつかのステップにおける処理が第1実施形態における処理と異なる。以下では、主に、この異なる処理について説明する。
また本第5実施形態では、図5に示すような複数の走査水準を順次照射するように、ターゲット27に対してパルスレーザ光31が走査される。このパルスレーザ光31は、EUV光277をバースト発光させるために、所定の高周波数でバースト発振される。こうして1つの走査水準において、複数のパルス状EUV光277が発せられる。
以下、制御部8による処理について、図4を参照して詳しく説明する。制御部8はステップS4において、EUV光センサ43の計測結果を取得する。 具体的には、制御部8は、複数のEUV光センサ43a乃至43cのそれぞれから送信された複数の計測値に統計処理を施し、1つの走査水準毎に、複数のEUV光277のエネルギを取得する。ここで、パルス状に発光する1つのEUV光277のエネルギは、複数のEUV光センサ43a乃至43cのそれぞれから送信された複数の計測値の平均値であってもよい。
本実施形態において制御部8は、ステップS5において、複数のEUV光277のエネルギのばらつきを示す指標を、EUVセンサ43の計測結果に基づいて取得する。この指標は、より詳しくは、1つの走査水準における複数のパルス状EUV光277について、エネルギのばらつきを示す指標である。この指標は、一例として、以下で述べるEUVエネルギ3σ[%]とされる。
このEUVエネルギ3σ[%]は、以下のように求められる。例えば1つのバースト発光期間において、パルスレーザ光31は10,000パルス発振される。つまり1つのバーストにおいて、EUV光277は10,000回パルス状に発せられる。制御部8はステップS4において、1つの走査水準毎に、バースト発光するEUV光277のエネルギの平均値と、標準偏差σとを求める。そして制御部8は、それらの平均値と標準偏差σとから、各バーストの(3σ/平均値)x100[%]の値を求め、その値の10バースト分の平均値を求めて、EUVエネルギ3σ[%]とする。制御部8は、このEUVエネルギ3σ[%]の値を、各走査水準と対応付けて記憶する。
ステップS5において、制御部8は、EUV光277の重心位置の評価値を特定する。この評価値の特定は、第1実施形態におけるのと同様に、例えば数式1及び数式2を計算してなされる。そして、制御部8は、数式1の計算値を、EUV光277の重心位置のX軸座標成分における評価値として特定する。また制御部8は、数式2の計算値を、EUV光277の重心位置のY軸座標成分における評価値として特定する。そして制御部8は、特定された上記2つの評価値を、各走査水準と対応付けて記憶する。ステップS6において、制御部8は、設定された走査水準群に含まれる複数の走査水準の全てが走査されたか否かを判定する。制御部8は、全ての走査水準が走査されていなければ、ステップS2に移行して処理を続行する。一方、制御部8は、全ての走査水準が走査されたならば、ステップS7に移行して処理を続行する。
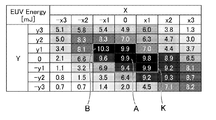
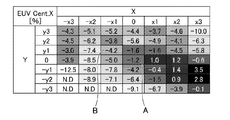
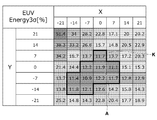
ステップS7において、制御部8は、各走査水準に対応付けて記憶されたEUVエネルギ3σ[%]の値に基づいて、図23に示されるようなEUVエネルギ3σ[%]の値の分布図を作成する。さらに制御部8は、各走査水準に対応付けて記憶された数式1の計算値に基づいて、図24に示されるような分布図を作成する。この分布図は、EUV光277の重心位置のX軸座標成分における評価値の分布を示す。加えて制御部8は、各走査水準に対応付けて記憶された数式2の計算値に基づいて、図25に示されるような分布図を作成する。この分布図は、EUV光277の重心位置のY軸座標成分における評価値の分布を示す。
なお、図24及び図25において、Xと共に記された-21、-14、-7、0、7、14及び21の値は、X軸方向に並ぶ複数の走査水準の、基準位置からのX軸方向距離を示す。同様に図24及び図25において、Yと共に記された-21、-14、-7、0、7、14及び21の値は、Y軸方向に並ぶ複数の走査水準の、基準位置からのY軸方向距離を示す。それらの距離の単位はμmである。また、距離0の位置が上記基準位置である。
ステップS8において、制御部8は、ステップS7において作成された各分布図に基づいて、目標重心位置を決定する。制御部8が目標重心位置を決定する処理については、図23乃至図30を参照して後述する。
制御部8によるステップS9の処理は、基本的に、第1実施形態における処理と同様になされる。
次に、主に図23乃至図30を参照して、図4のステップS8において制御部8が目標重心位置を決定する処理について説明する。図26は、図23に示された走査水準Aを中心としてX軸及びY軸に沿って配列された複数の走査水準と、これらの走査水準の各々に対応付けて記憶されたEUVエネルギ3σ[%]の値とを示す。図27は、図23に示された走査水準Aを中心としてX軸に沿って配列された複数の走査水準と、これらの走査水準の各々に対応付けて記憶されたEUV光277の重心位置のX軸座標成分における評価値とを示す。図28は、図23に示された走査水準Aを中心としてY軸に沿って配列された複数の走査水準と、これらの走査水準の各々に対応付けて記憶されたEUV光277の重心位置のY軸座標成分における評価値とを示す。
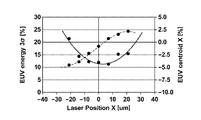
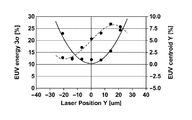
図29は、X軸に沿った方向におけるEUVエネルギ3σ[%]の値の分布と、重心位置の評価値の分布とを示す。この評価値は、前述した数式1による計算結果である。また図30は、Y軸に沿った方向におけるEUVエネルギ3σ[%]の値の分布と、重心位置の評価値の分布とを示す。この評価値は、前述した数式2による計算結果である。なお図29及び図30には、それぞれ、EUVエネルギ3σ[%]の値の分布を次数2次の多項式近似を用いてフィッティングした曲線を実線で、また重心位置の評価値の分布を次数3次の多項式近似を用いてフィッティングした曲線を破線で示している。
制御部8は、図4のステップS7において作成された分布図に基づいて次のような処理を行うことによって、目標重心位置を決定する。すなわち制御部8は、図23に示されるように、設定された走査水準群に含まれる複数の走査水準のそれぞれで取得されたEUVエネルギ3σ[%]の値が所定範囲内にある走査水準の範囲Kを特定する。この範囲Kは、例えばEUVエネルギ3σ[%]の値が下位10%以内にある範囲である。より詳しく言えば範囲Kは、EUVエネルギ3σ[%]の値が、最小値以上で、最小値よりも10%大の値以下となる範囲である。
制御部8は、図23に示された走査水準Aを、下記のように範囲Kに基づいて求める。すなわち制御部8は、特定された範囲K内にある各走査水準に対応付けて記憶されたEUVエネルギ3σ[%]の値を、それらの値の平均値で重み付けした幾何学重心を求め、その幾何学重心に最も近い走査水準を走査水準Aと特定する。続いて制御部8は、図26に示されるように、特定された走査水準Aを中心としてX軸に沿って配列された複数の走査水準と、特定された走査水準Aを中心としてY軸に沿って配列された複数の走査水準とを特定する。
続いて制御部8は、図27に示されるように、走査水準Aを中心としてX軸に沿って配列された複数の走査水準に対応付けて記憶された、EUV光277の重心位置の評価値を特定する。加えて、制御部8は、図28に示されるように、走査水準Aを中心としてY軸に沿って配列された複数の走査水準に対応付けて記憶された、EUV光277の重心位置の評価値を特定する。
続いて制御部8は、図27のように特定された評価値の分布、つまり走査水準Aを中心としX軸に沿った方向におけるEUV光277の重心位置の評価値の分布を求める。制御部8は、この分布を次数3次の多項式近似を用いてフィッティングする。このフィッティングによる3次曲線は、前述した通り、図29に破線で示された曲線である。さらに制御部8は、走査水準Aを中心としX軸に沿った方向におけるEUVエネルギ3σ[%]の値の分布を求める。制御部8は、この分布を次数2次の多項式近似を用いてフィッティングする。このフィッティングによる2次曲線は、前述した通り、図29に実線で示された曲線である。
加えて制御部8は、図28のように特定された評価値の分布、つまり走査水準Aを中心としY軸に沿った方向におけるEUV光277の重心位置の評価値の分布を求める。制御部8は、この分布を次数3次の多項式近似を用いてフィッティングする。このフィッティングによる3次曲線は、前述した通り、図30に破線で示された曲線である。さらに制御部8は、走査水準Aを中心としY軸に沿った方向におけるEUVエネルギ3σ[%]の値の分布を求める。制御部8は、この分布を次数2次の多項式近似を用いてフィッティングする。このフィッティングによる2次曲線は、前述した通り、図30に実線で示された曲線である。
EUV光277の重心位置の評価値の分布は、各々図29及び図30の破線で示されるように、走査水準A及びその付近の位置において線形的に変化し、走査水準Aから離れた位置において非線形的に変化し得る。この評価値の分布が非線形的に変化する部分は、パルスレーザ光31の照射位置が適切な位置から外れ、比較的大きなシューティングずれが発生し得る照射位置と考えられる。
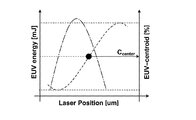
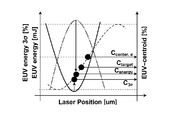
そこで制御部8は、図29及び図30の各破線で示される3次曲線における各変曲点に基づいて、目標重心位置を決定する。本実施形態において制御部8は、この変曲点だけでなく、EUVエネルギ3σ[%]の値の分布にも基づいて、目標重心位置を決定する。図31は、この目標重心位置を決定する処理を説明する図である。なおこの図31では、図29及び図30における3次曲線および2次曲線を、典型的な曲線としてそれぞれ破線、実線で概略的に示している。
制御部8は、以下の通りにして目標重心位置を決定する。すなわち制御部8は、図31に示す3次曲線の変曲点に対応するEUV重心位置Ccenter,sを求める。なお、EUV重心位置Ccenter,sとしては、EUV重心計測値の最大・最小値の中点を選んでもよく、1次近似の計測範囲における中点を選んでもよい。また制御部8は、図31に示す2次曲線から、その頂点となるレーザ照射位置に対応するEUV重心位置C3σを求める。このEUV重心位置C3σは、上記頂点となるレーザ照射位置における3次曲線上の点に対応する、上記重心位置の評価値と等価である。そして制御部8は、下記の数式3から得るCtargetを、目標重心位置として求める。制御部8は、このCtargetを求める処理を、例えば図4のステップS8において行う。
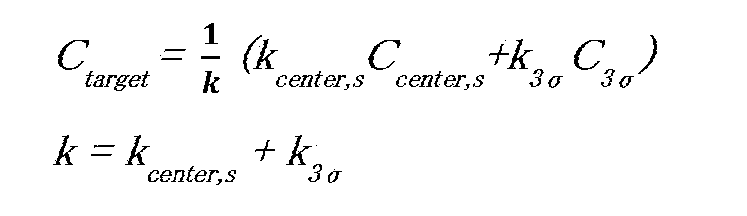
ここで、kcenter,s及びk3σは例えば共に1とされ、その場合k=2となる。
なお、数式3からCtargetを求める処理は、図29に示すX軸方向に関する重心位置の評価値の分布、並びにEUVエネルギ3σ[%]の値の分布に基づいてなされる。またCtargetを求める処理は、図30に示すY軸方向に関する重心位置の評価値の分布、並びにEUVエネルギ3σ[%]の値の分布に基づいて同様になされる。
制御部8は、例えば図4のステップS9において、ステップS8で決定された目標重心位置を新たな目標重心位置に設定する。そして、制御部8は、EUV光重心制御に移行する。制御部8は、EUV光277の重心位置が新たな目標重心位置となるよう、パルスレーザ光31の照射位置の目標照射位置を設定する。そして、制御部8は、設定された目標照射位置に応じて照射位置調節部7を制御する。
具体的には、制御部8は、現在のパルスレーザ光31の照射位置と、新たな目標重心位置に応じたパルスレーザ光31の新たな目標照射位置との偏差を特定する。そして、制御部8は、現在のパルスレーザ光31の集光位置と、新たな目標照射位置に応じたパルスレーザ光31の新たな目標集光位置との偏差を特定する。次に制御部8は、パルスレーザ光31の集光位置における偏差が無くなるような照射位置調節部7の調節量を決定する。このようにして、制御部8は、EUV光重心制御を実行するにあたって、その都度、目標重心位置を較正し得る。
[7.3 作用効果]
以上の通り、第5実施形態に係る制御部8は、EUV光重心制御を実行するにあたって、その都度、EUV光277の重心位置における目標重心位置を較正し得る。それによって得られる作用効果は、基本的に第1実施形態における作用効果と同じである。それに加えて、本第5実施形態においては、複数のEUV光277のばらつきを示す指標であるEUVエネルギ3σ[%]の値の最小値に近いEUV重心位置C3σの値も考慮して目標重心位置を較正している。上記指標がより小さいということは、複数のEUV光277がより安定して発せられているということである。そこで、EUV重心位置C3σの値も考慮して目標重心位置を較正すれば、バースト発光するEUV光277の出力がより安定化され得る。
以上の通り、第5実施形態に係る制御部8は、EUV光重心制御を実行するにあたって、その都度、EUV光277の重心位置における目標重心位置を較正し得る。それによって得られる作用効果は、基本的に第1実施形態における作用効果と同じである。それに加えて、本第5実施形態においては、複数のEUV光277のばらつきを示す指標であるEUVエネルギ3σ[%]の値の最小値に近いEUV重心位置C3σの値も考慮して目標重心位置を較正している。上記指標がより小さいということは、複数のEUV光277がより安定して発せられているということである。そこで、EUV重心位置C3σの値も考慮して目標重心位置を較正すれば、バースト発光するEUV光277の出力がより安定化され得る。
なお、前述した第1実施形態においては、図32に概略を示すように、下記の数式4から得るCtargetを、目標重心位置として求めている。ここで、図32において1点鎖線で示す2次曲線は、図12或いは図13に示すEUV光277のエネルギ分布を、次数2次の多項式近似を用いてフィッティングして得られる。また、図32において破線で示す3次曲線は、図31において破線で示す3次曲線と同等である。
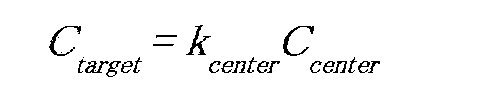
ここで、EUV重心位置Ccenterは、図31におけるEUV重心位置Ccenter,sに相当する。またkcenterは例えば1とされる。
[8.第6実施形態]
次に図33を参照して、第6実施形態のEUV光生成装置1について説明する。この第6実施形態のEUV光生成装置1は、上述した第5実施形態のEUV光生成装置1と対比すると、目標重心位置となるCtargetの求め方が異なる。第6実施形態のEUV光生成装置1の制御部8は、この異なるCtargetを求めるための構成を備え得る。
次に図33を参照して、第6実施形態のEUV光生成装置1について説明する。この第6実施形態のEUV光生成装置1は、上述した第5実施形態のEUV光生成装置1と対比すると、目標重心位置となるCtargetの求め方が異なる。第6実施形態のEUV光生成装置1の制御部8は、この異なるCtargetを求めるための構成を備え得る。
図33において1点鎖線で示す2次曲線は、図32において1点鎖線で示す2次曲線に相当する曲線である。また、図33において破線で示す3次曲線は、図31及び図32において破線で示す3次曲線に相当する。また、図33に示すEUV重心位置Ccenter,eは、図31に示すEUV重心位置Ccenter,sと同等である。この場合も、EUV重心位置Ccenter,eとしては、EUV重心計測値の最大・最小値の中点を選んでもよく、1次近似の計測範囲における中点を選んでもよい。制御部8は、EUV光277のエネルギ分布をフィッティングして上記の2次曲線を求める。このエネルギ分布は例えば、EUV光277のエネルギの上位10%以内の範囲を抽出した値の重心点から求められる。その場合、EUV光277のエネルギとしては、例えばEUV光277の10バースト分の平均値が適用される。また、このEUV光277のエネルギ分布に代えて、EUV光の発光効率の分布が用いられてもよい。EUV光の発光効率は、ターゲットを照射するレーザ光のエネルギに対するEUV光のエネルギの比率である。
制御部8は、以上のようにして得た2次曲線から、その頂点に基づいてEUV重心位置Cenergyを求める。つまりこのEUV重心位置Cenergyは、上記頂点に対応するパルスレーザ照射位置において、上記3次曲線が取る値である。そして制御部8は、下記の数式5から得るCtargetを、目標重心位置として求める。制御部8は、このCtargetを求める処理を、例えば図4のステップS8において行う。

ここで、kcenter,e及びkenergyは例えば共に1とされ、その場合k=2となる。
本第6実施形態による作用効果は、基本的に第1実施形態における作用効果と同じである。それに加えて本第6実施形態においては、EUV重心位置Cenergyの値も考慮して目標重心位置を較正している。そこで、バースト発光するEUV光277がより高出力化され得る。
[9.第7実施形態]
次に図34を参照して、第7実施形態のEUV光生成装置1について説明する。この第7実施形態のEUV光生成装置1は、上述した第5実施形態のEUV光生成装置1と対比すると、目標重心位置となるCtargetの求め方が異なる。第7実施形態のEUV光生成装置1の制御部8は、この異なるCtargetを求めるための構成を備え得る。
次に図34を参照して、第7実施形態のEUV光生成装置1について説明する。この第7実施形態のEUV光生成装置1は、上述した第5実施形態のEUV光生成装置1と対比すると、目標重心位置となるCtargetの求め方が異なる。第7実施形態のEUV光生成装置1の制御部8は、この異なるCtargetを求めるための構成を備え得る。
図34において1点鎖線で示す2次曲線は、図32及び図33において1点鎖線で示す2次曲線に相当する。図34において破線で示す3次曲線は、図31乃至図33において破線で示す3次曲線に相当する。図34において実線で示す2次曲線は、図31において実線で示す2次曲線に相当する。図34に示すEUV重心位置Ccenter,e及びCenergyは、図33に示すEUV重心位置Ccenter,e及びCenergyとそれぞれ同等である。また図34に示すEUV重心位置C3σは、図31に示すEUV重心位置C3σと同等である。
制御部8は、下記の数式6から得るCtargetを、目標重心位置として求める。制御部8は、このCtargetを求める処理を、例えば図4のステップS8において行う。

ここで、kcenter,s、kcenter,e、k3σ及びkenergyは例えば全て1とされ、その場合k=4となる。
本第7実施形態による作用効果は、基本的に第1実施形態における作用効果と同じである。それに加えて本第7実施形態においては、EUV重心位置C3σの値及びEUV重心位置Cenergyの値も考慮して目標重心位置を較正している。そこで、バースト発光するEUV光277の出力がより安定し、また高出力化され得る。
[10.その他]
上記で説明した実施形態は、変形例を含めて各実施形態同士で互いの技術を適用し得ることは、当業者には明らかであろう。
上記で説明した実施形態は、変形例を含めて各実施形態同士で互いの技術を適用し得ることは、当業者には明らかであろう。
上記の説明は、制限ではなく単なる例示を意図している。従って、添付の特許請求の範囲を逸脱することなく本開示の実施形態に変更を加えることができることは、当業者には明らかであろう。
本明細書及び添付の特許請求の範囲全体で使用される用語は、「限定的でない」用語と解釈されるべきである。例えば、「含む」又は「含まれる」という用語は、「含まれるものとして記載されたものに限定されない」と解釈されるべきである。「有する」という用語は、「有するものとして記載されたものに限定されない」と解釈されるべきである。また、本明細書、及び添付の特許請求の範囲に記載される修飾語「1つの」は、「少なくとも1つ」又は「1又はそれ以上」を意味すると解釈されるべきである。
1 …EUV光生成装置
11 …EUV光生成システム
2 …チャンバ
211 …壁
212 …ターゲット供給路
215 …ウインドウ
216 …ウインドウ
217 …ウインドウ
22 …レーザ光集光光学系
221 …レーザ光集光ミラー
222 …軸外放物面ミラー
223 …平面ミラー
224 …マニピュレータ
23 …EUV光集光光学系
231 …EUV光集光ミラー
232 …貫通孔
24 …接続部
241 …壁
242 …アパーチャ
25 …ターゲット供給器
251 …タンク
252 …ノズル
253 …ヒータ
254 …圧力調節器
255 …ピエゾ素子
26 …ステージ
27 …ターゲット
275 …プラズマ
276 …放射光
277 …EUV光
28 …ターゲット回収器
3 …レーザ装置
3a …メインパルスレーザ装置
3b …第1プリパルスレーザ装置
3c …第2プリパルスレーザ装置
31 …パルスレーザ光
31a …メインパルスレーザ光
31b …第1プリパルスレーザ光
31c …第2プリパルスレーザ光
33 …レーザ光伝送光学系
331 …高反射ミラー
332 …高反射ミラー
341 …高反射ミラー
342 …ミラー
343 …第1ミラー光学系
344 …高反射ミラー
345 …ステージ
351 …ビームコンバイナ
352 …ダイクロイックミラー
353 …第2ミラー光学系
354 …高反射ミラー
355 …ステージ
41 …ターゲット検出センサ
410 …照明部
411 …光源
412 …照明光学系
420 …検出部
421 …光センサ
422 …受光光学系
43 …EUV光センサ
43a …EUV光センサ
43b …EUV光センサ
43c …EUV光センサ
7 …照射位置調節部
8 …制御部
81 …遅延回路
9 …露光装置
A …走査水準
B …走査水準
IF …中間集光点
K …範囲
Q …ターゲット軌道
R1 …プラズマ生成領域
R2 …ターゲット検出領域
11 …EUV光生成システム
2 …チャンバ
211 …壁
212 …ターゲット供給路
215 …ウインドウ
216 …ウインドウ
217 …ウインドウ
22 …レーザ光集光光学系
221 …レーザ光集光ミラー
222 …軸外放物面ミラー
223 …平面ミラー
224 …マニピュレータ
23 …EUV光集光光学系
231 …EUV光集光ミラー
232 …貫通孔
24 …接続部
241 …壁
242 …アパーチャ
25 …ターゲット供給器
251 …タンク
252 …ノズル
253 …ヒータ
254 …圧力調節器
255 …ピエゾ素子
26 …ステージ
27 …ターゲット
275 …プラズマ
276 …放射光
277 …EUV光
28 …ターゲット回収器
3 …レーザ装置
3a …メインパルスレーザ装置
3b …第1プリパルスレーザ装置
3c …第2プリパルスレーザ装置
31 …パルスレーザ光
31a …メインパルスレーザ光
31b …第1プリパルスレーザ光
31c …第2プリパルスレーザ光
33 …レーザ光伝送光学系
331 …高反射ミラー
332 …高反射ミラー
341 …高反射ミラー
342 …ミラー
343 …第1ミラー光学系
344 …高反射ミラー
345 …ステージ
351 …ビームコンバイナ
352 …ダイクロイックミラー
353 …第2ミラー光学系
354 …高反射ミラー
355 …ステージ
41 …ターゲット検出センサ
410 …照明部
411 …光源
412 …照明光学系
420 …検出部
421 …光センサ
422 …受光光学系
43 …EUV光センサ
43a …EUV光センサ
43b …EUV光センサ
43c …EUV光センサ
7 …照射位置調節部
8 …制御部
81 …遅延回路
9 …露光装置
A …走査水準
B …走査水準
IF …中間集光点
K …範囲
Q …ターゲット軌道
R1 …プラズマ生成領域
R2 …ターゲット検出領域
Claims (25)
- チャンバ内の所定領域に供給されたターゲットにレーザ光が照射されることによって生成された極端紫外光のエネルギを互いに異なる方向から計測する複数のEUV光センサと、
前記所定領域に供給された前記ターゲットに対する前記レーザ光の照射位置を調節する照射位置調節部と、
前記複数のEUV光センサの計測結果から特定された前記極端紫外光の重心位置が目標重心位置となるよう前記照射位置調節部を制御する制御部と、
を備え、
前記制御部は、
互いに位置が異なる複数の走査水準に従って前記照射位置が走査されるよう前記照射位置調節部を制御し、
前記複数の走査水準のそれぞれで取得された前記計測結果に基づいて前記目標重心位置を較正する
極端紫外光生成装置。 - 前記制御部は、
前記極端紫外光の前記重心位置が前記目標重心位置となるよう前記照射位置の目標照射位置を設定し、
設定された前記目標照射位置に応じて前記照射位置調節部を制御する
請求項1に記載の極端紫外光生成装置。 - 前記制御部は少なくとも、前記複数の走査水準のそれぞれで取得された前記計測結果から特定された、前記複数の走査水準のそれぞれでの前記重心位置の評価値に基づいて前記目標重心位置を較正する
請求項2に記載の極端紫外光生成装置。 - 前記制御部は、前記評価値と、前記複数の走査水準のそれぞれで発生した複数の極端紫外光の間のエネルギばらつきとに基づいて前記目標重心位置を較正する
請求項3に記載の極端紫外光生成装置。 - 前記制御部は、前記評価値と、前記複数の走査水準のそれぞれで発生した極端紫外光のエネルギとに基づいて前記目標重心位置を較正する
請求項3に記載の極端紫外光生成装置。 - 前記制御部は、前記評価値と、前記複数の走査水準のそれぞれで発生した極端紫外光のエネルギと、前記複数の走査水準のそれぞれで発生した複数の極端紫外光の間のエネルギばらつきとに基づいて前記目標重心位置を較正する
請求項3に記載の極端紫外光生成装置。 - 前記照射位置調節部は、
前記レーザ光を前記所定領域に集光する集光ミラーと、
前記集光ミラーの位置及び姿勢の少なくとも1つを調節するマニピュレータと、
を含む
請求項3に記載の極端紫外光生成装置。 - 前記複数のEUV光センサは、前記所定領域に対して互いに等距離に配置された少なくとも3つのEUV光センサから構成される
請求項3に記載の極端紫外光生成装置。 - 前記レーザ光は、
前記所定領域に供給されたターゲットに照射される第1プリパルスレーザ光と、
前記第1プリパルスレーザ光が照射された前記ターゲットに照射される第2プリパルスレーザ光と、
前記第2プリパルスレーザ光が照射された前記ターゲットに照射されるメインパルスレーザ光と、
を含む請求項3に記載の極端紫外光生成装置。 - 前記制御部は、
前記極端紫外光生成装置が起動すること、
前記極端紫外光が所定パルス数だけ生成されたこと、
前記極端紫外光の前記エネルギ及び前記エネルギのばらつきの少なくとも1つが許容範囲から外れたこと、及び、
前記極端紫外光生成装置が起動してから所定時間だけ経過したこと、
のうちの少なくとも1つの事象が発生した際に、
前記照射位置が走査されるよう前記照射位置調節部を制御すると共に前記目標重心位置を較正する
請求項3に記載の極端紫外光生成装置。 - 前記制御部は、前記所定領域における前記レーザ光の照射径に応じて前記複数の走査水準を設定する
請求項3に記載の極端紫外光生成装置。 - 前記制御部は、前記所定領域に向かって進行する前記レーザ光の進行方向に垂直であって前記所定領域に交差する平面上の2つの軸に沿って配列された複数の位置を、前記複数の走査水準に設定する
請求項3に記載の極端紫外光生成装置。 - 前記制御部は、
前記複数の走査水準のそれぞれで取得された前記計測結果のうちで前記エネルギが最大である前記計測結果が取得された前記走査水準を特定し、
特定された前記走査水準を中心として前記2つの軸の一方に沿って配列された前記複数の走査水準での前記評価値と、特定された前記走査水準を中心として前記2つの軸の他方に沿って配列された前記複数の走査水準での前記評価値とに基づいて前記目標重心位置を較正する
請求項12に記載の極端紫外光生成装置。 - 前記制御部は、
前記複数の走査水準のそれぞれで取得された前記計測結果のうちで前記エネルギが所定範囲内にある前記走査水準の範囲を特定し、
特定された前記範囲内での前記計測結果の加重平均値に最も近い前記計測結果が取得された前記走査水準を特定し、
特定された前記走査水準を中心として前記2つの軸の一方に沿って配列された前記複数の走査水準での前記評価値と、特定された前記走査水準を中心として前記2つの軸の他方に沿って配列された前記複数の走査水準での前記評価値とに基づいて前記目標重心位置を較正する
請求項12に記載の極端紫外光生成装置。 - 前記制御部は、
特定された前記走査水準を中心として前記2つの軸の一方に沿った方向においての前記評価値の分布と、特定された前記走査水準を中心として前記2つの軸の他方に沿った方向においての前記評価値の分布とを、それぞれ3次関数でフィッティングし、
フィッティングされたそれぞれの前記3次関数が示す3次曲線における各変曲点に対応する位置を前記目標重心位置に決定することによって、前記目標重心位置を較正する
請求項14に記載の極端紫外光生成装置。 - 前記制御部は、
特定された前記走査水準を中心として前記2つの軸の一方に沿った方向においての前記評価値の分布と、特定された前記走査水準を中心として前記2つの軸の他方に沿った方向においての前記評価値の分布とを、それぞれ1次関数でフィッティングし、
フィッティングされたそれぞれの前記1次関数が示す線分における各中点に対応する位置を前記目標重心位置に決定することによって、前記目標重心位置を較正する
請求項14に記載の極端紫外光生成装置。 - 前記制御部は、
特定された前記走査水準を中心として前記2つの軸の一方に沿った方向においての前記評価値の分布における最大値及び最小値と、特定された前記走査水準を中心として前記2つの軸の他方に沿った方向においての前記評価値の分布における最大値及び最小値とを特定し、
特定されたそれぞれの前記最大値及び前記最小値における各平均値に対応する位置を前記目標重心位置に決定することによって、前記目標重心位置を較正する
請求項14に記載の極端紫外光生成装置。 - ターゲットにレーザ光が照射されることによって生成された極端紫外光の重心位置を制御する方法であって、
互いに位置が異なる複数の走査水準に従って前記ターゲットに対する前記レーザ光の照射位置を走査して、前記複数の走査水準のそれぞれで前記極端紫外光のエネルギを取得する第1ステップと、
前記第1ステップによって取得された前記エネルギから、前記複数の走査水準のそれぞれでの前記重心位置の評価値を特定する第2ステップと、
前記第1ステップによって取得された前記エネルギと、前記第2ステップによって特定された前記評価値との少なくとも一方に基づいて、前記重心位置の目標重心位置を較正する第3ステップと、
を備える
極端紫外光の重心位置の制御方法。 - 前記極端紫外光を生成する極端紫外光生成装置が起動する際に、前記第1乃至第3ステップを実行する
請求項18に記載の極端紫外光の重心位置の制御方法。 - 前記極端紫外光が所定パルス数だけ生成された際に、前記第1乃至第3ステップを実行する
請求項18に記載の極端紫外光の重心位置の制御方法。 - 前記極端紫外光の前記エネルギ及び前記エネルギのばらつきの少なくとも1つが許容範囲から外れた際に、前記第1乃至第3ステップを実行する
請求項18に記載の極端紫外光の重心位置の制御方法。 - 前記極端紫外光を生成する極端紫外光生成装置が起動してから所定時間だけ経過した際に、前記第1乃至第3ステップを実行する
請求項18に記載の極端紫外光の重心位置の制御方法。 - 前記第3ステップとして、前記評価値と、前記複数の走査水準のそれぞれで発生した複数の極端紫外光の間のエネルギばらつきとに基づいて前記目標重心位置を較正するステップを実行する
請求項18に記載の極端紫外光の重心位置の制御方法。 - 前記第3ステップとして、前記評価値と、前記エネルギとに基づいて前記目標重心位置を較正するステップを実行する
請求項18に記載の極端紫外光の重心位置の制御方法。 - 前記第3ステップとして、前記評価値と、前記エネルギと、前記複数の走査水準のそれぞれで発生した複数の極端紫外光の間のエネルギばらつきとに基づいて前記目標重心位置を較正するステップを実行する
請求項18に記載の極端紫外光の重心位置の制御方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018507379A JP6799583B2 (ja) | 2016-03-23 | 2017-03-22 | 極端紫外光生成装置及び極端紫外光の重心位置の制御方法 |
| US16/055,279 US10251254B2 (en) | 2016-03-23 | 2018-08-06 | Extreme ultraviolet light generating apparatus and control method for centroid of extreme ultraviolet light |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JPPCT/JP2016/059236 | 2016-03-23 | ||
| PCT/JP2016/059236 WO2017163345A1 (ja) | 2016-03-23 | 2016-03-23 | 極端紫外光生成装置及び極端紫外光の重心位置の制御方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US16/055,279 Continuation US10251254B2 (en) | 2016-03-23 | 2018-08-06 | Extreme ultraviolet light generating apparatus and control method for centroid of extreme ultraviolet light |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017164251A1 true WO2017164251A1 (ja) | 2017-09-28 |
Family
ID=59900033
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/059236 WO2017163345A1 (ja) | 2016-03-23 | 2016-03-23 | 極端紫外光生成装置及び極端紫外光の重心位置の制御方法 |
| PCT/JP2017/011516 WO2017164251A1 (ja) | 2016-03-23 | 2017-03-22 | 極端紫外光生成装置及び極端紫外光の重心位置の制御方法 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/059236 WO2017163345A1 (ja) | 2016-03-23 | 2016-03-23 | 極端紫外光生成装置及び極端紫外光の重心位置の制御方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10251254B2 (ja) |
| JP (1) | JP6799583B2 (ja) |
| WO (2) | WO2017163345A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2019175964A1 (ja) * | 2018-03-13 | 2021-03-18 | ギガフォトン株式会社 | 架台、極端紫外光生成システム、及びデバイスの製造方法 |
| JP2022007446A (ja) * | 2020-06-26 | 2022-01-13 | ギガフォトン株式会社 | 極端紫外光生成システム及び電子デバイスの製造方法 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7261683B2 (ja) * | 2019-07-23 | 2023-04-20 | ギガフォトン株式会社 | 極端紫外光生成システム及び電子デバイスの製造方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007109451A (ja) * | 2005-10-12 | 2007-04-26 | Komatsu Ltd | 極端紫外光源装置の初期アライメント方法 |
| US8598552B1 (en) * | 2012-05-31 | 2013-12-03 | Cymer, Inc. | System and method to optimize extreme ultraviolet light generation |
| JP2014531743A (ja) * | 2011-08-19 | 2014-11-27 | エーエスエムエル ネザーランズ ビー.ブイ. | 光ビームアラインメントのためのエネルギセンサ |
| JP2015524599A (ja) * | 2012-07-06 | 2015-08-24 | イーティーエイチ・チューリッヒ | 液滴ターゲットとレーザとの間の相互作用を制御するための方法、および、前記方法を行なうための装置 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102014208792A1 (de) * | 2014-05-09 | 2015-11-12 | Carl Zeiss Smt Gmbh | System und Verfahren zur Analyse eines von einer Strahlführungsoptik geführten Lichtstrahls |
-
2016
- 2016-03-23 WO PCT/JP2016/059236 patent/WO2017163345A1/ja active Application Filing
-
2017
- 2017-03-22 JP JP2018507379A patent/JP6799583B2/ja active Active
- 2017-03-22 WO PCT/JP2017/011516 patent/WO2017164251A1/ja active Application Filing
-
2018
- 2018-08-06 US US16/055,279 patent/US10251254B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007109451A (ja) * | 2005-10-12 | 2007-04-26 | Komatsu Ltd | 極端紫外光源装置の初期アライメント方法 |
| JP2014531743A (ja) * | 2011-08-19 | 2014-11-27 | エーエスエムエル ネザーランズ ビー.ブイ. | 光ビームアラインメントのためのエネルギセンサ |
| US8598552B1 (en) * | 2012-05-31 | 2013-12-03 | Cymer, Inc. | System and method to optimize extreme ultraviolet light generation |
| JP2015524599A (ja) * | 2012-07-06 | 2015-08-24 | イーティーエイチ・チューリッヒ | 液滴ターゲットとレーザとの間の相互作用を制御するための方法、および、前記方法を行なうための装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2019175964A1 (ja) * | 2018-03-13 | 2021-03-18 | ギガフォトン株式会社 | 架台、極端紫外光生成システム、及びデバイスの製造方法 |
| JP7110323B2 (ja) | 2018-03-13 | 2022-08-01 | ギガフォトン株式会社 | 架台、極端紫外光生成システム、及びデバイスの製造方法 |
| JP2022007446A (ja) * | 2020-06-26 | 2022-01-13 | ギガフォトン株式会社 | 極端紫外光生成システム及び電子デバイスの製造方法 |
| JP7426299B2 (ja) | 2020-06-26 | 2024-02-01 | ギガフォトン株式会社 | 極端紫外光生成システム及び電子デバイスの製造方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2017163345A1 (ja) | 2017-09-28 |
| JP6799583B2 (ja) | 2020-12-16 |
| US20180343729A1 (en) | 2018-11-29 |
| JPWO2017164251A1 (ja) | 2019-02-14 |
| US10251254B2 (en) | 2019-04-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN105723811B (zh) | 用于控制euv光源中的靶材料的微滴的系统和方法 | |
| US9241395B2 (en) | System and method for controlling droplet timing in an LPP EUV light source | |
| US8809823B1 (en) | System and method for controlling droplet timing and steering in an LPP EUV light source | |
| US10225918B2 (en) | Extreme ultraviolet light generating apparatus | |
| US9661730B2 (en) | Extreme ultraviolet light generation apparatus with a gas supply toward a trajectory of a target | |
| US10102938B2 (en) | Extreme ultraviolet light generating apparatus | |
| JP6775606B2 (ja) | 極端紫外光生成システム | |
| WO2017164251A1 (ja) | 極端紫外光生成装置及び極端紫外光の重心位置の制御方法 | |
| WO2016013114A1 (ja) | 極端紫外光生成装置 | |
| CN108348763B (zh) | 用于在lpp euv光源中控制源激光器激发的系统和方法 | |
| JP2014534559A (ja) | 放射源 | |
| US9510434B2 (en) | Extreme ultraviolet light generating apparatus, method of generating extreme ultraviolet light, concentrated pulsed laser light beam measuring apparatus, and method of measuring concentrated pulsed laser light beam | |
| WO2017130346A1 (ja) | 極端紫外光生成装置 | |
| JP6378355B2 (ja) | 極端紫外光生成装置及び極端紫外光の生成方法 | |
| JP6866471B2 (ja) | Euv光生成装置 | |
| US20180173102A1 (en) | Extreme ultraviolet light generation device | |
| US9578730B2 (en) | Extreme ultraviolet light generation apparatus and extreme ultraviolet light generation system | |
| JP6556235B2 (ja) | 極端紫外光生成装置 | |
| JP2023048733A (ja) | Euv光生成装置、電子デバイス製造方法、及び検査方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 2018507379 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17770291 Country of ref document: EP Kind code of ref document: A1 |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 17770291 Country of ref document: EP Kind code of ref document: A1 |