WO2017141414A1 - 地物データ構造、制御装置、記憶装置、制御方法、プログラム及び記憶媒体 - Google Patents
地物データ構造、制御装置、記憶装置、制御方法、プログラム及び記憶媒体 Download PDFInfo
- Publication number
- WO2017141414A1 WO2017141414A1 PCT/JP2016/054806 JP2016054806W WO2017141414A1 WO 2017141414 A1 WO2017141414 A1 WO 2017141414A1 JP 2016054806 W JP2016054806 W JP 2016054806W WO 2017141414 A1 WO2017141414 A1 WO 2017141414A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- information
- feature
- landmark
- setting information
- unit
- Prior art date
Links
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/28—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network with correlation of data from several navigational instruments
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3807—Creation or updating of map data characterised by the type of data
- G01C21/3811—Point data, e.g. Point of Interest [POI]
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3833—Creation or updating of map data characterised by the source of data
- G01C21/3848—Data obtained from both position sensors and additional sensors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/42—Simultaneous measurement of distance and other co-ordinates
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/86—Combinations of lidar systems with systems other than lidar, radar or sonar, e.g. with direction finders
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/89—Lidar systems specially adapted for specific applications for mapping or imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/484—Transmitters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4865—Time delay measurement, e.g. time-of-flight measurement, time of arrival measurement or determining the exact position of a peak
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/483—Details of pulse systems
- G01S7/486—Receivers
- G01S7/4868—Controlling received signal intensity or exposure of sensor
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/20—Information retrieval; Database structures therefor; File system structures therefor of structured data, e.g. relational data
- G06F16/29—Geographical information databases
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B29/00—Maps; Plans; Charts; Diagrams, e.g. route diagram
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Electromagnetism (AREA)
- Theoretical Computer Science (AREA)
- Automation & Control Theory (AREA)
- Databases & Information Systems (AREA)
- Mathematical Physics (AREA)
- Business, Economics & Management (AREA)
- Educational Administration (AREA)
- Educational Technology (AREA)
- Data Mining & Analysis (AREA)
- General Engineering & Computer Science (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
を有することを特徴とする。
として前記コンピュータを機能させることを特徴とする。
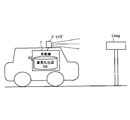
図1は、本実施例に係る高度化地図システムの概略構成である。高度化地図システムは、車両と共に移動する車載機1と、車載機1により制御されるライダ(Lidar:Light Detection and Ranging、または、Laser Illuminated Detection And Ranging)2と、高度化地図DB43を記憶するサーバ装置4とを備える。そして、高度化地図システムは、道路周辺に存在する地物(「ランドマーク」とも呼ぶ。)を検知するためのライダ2の設定をランドマークごとに画一化し、互換性のある高精度な測定データを生成する。図1では、道路沿いに設けられた看板であるランドマークLtagをライダ2により検出する例が示されている。
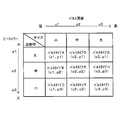
次に、車載機1によるライダ2のパルスレーザの出射制御について説明する。車載機1は、サーバ装置4から受信した応答情報D2に含まれるパルスタイプ情報に基づき、ライダ2に出射させるパルスレーザのピークパワー及びパルス周期を決定する。
図5は、本実施例における処理手順を示すフローチャートである。図5は、代表例として、車載機1がライダ2の出力に基づき高度化地図DB43の更新情報を行う場合の処理フローについて示している。車載機1は、図5のフローチャートの処理を、例えば所定の周期に従い繰り返し実行する。
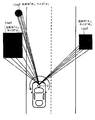
次に、複数のランドマークを同時に検出する場合について説明する。概略的には、車載機1は、検出対象の各ランドマークのランドマーク位置情報と自車位置情報とに基づき各ランドマークが照射される出射角度を認識し、認識した出射角度ごとにライダ2に適用すべきパルスタイプ情報を切り替える。これにより、車載機1は、複数のランドマークを同時に検出する場合であっても、各ランドマークに適した設定条件によりライダ2を駆動させる。
次に、実施例に好適な変形例について説明する。以下の変形例は、任意に組み合わせて上述の実施例に適用してもよい。
車載機1は、サーバ装置4から受信したパルスタイプ情報に基づきライダ2を制御する代わりに、サーバ装置4からランドマークの反射率及びサイズの情報を受信し、これらの情報からライダ2のレーザパルスのピークパワー及びパルス周期を決定し、ライダ2を制御してもよい。
車載機1は、サーバ装置4に代えて、高度化地図DB43を記憶部12に予め記憶してもよい。
車載機1は、センサ部13等により自車位置情報を計測する自車位置計測装置と別体に構成され、自車位置計測装置から自車位置情報を受信してもよい。
2 ライダ
4 サーバ装置
11、41 通信部
12、42 記憶部
13 センサ部
14 入力部
15、45 制御部
16 出力部
43 高度化地図DB
Claims (11)
- 地物を示す地物データ構造であって、
少なくとも、前記地物を検知装置で検知するための前記検知装置における設定情報が含まれる地物データ構造。 - 前記検知装置は、出射方向を変えながら光を出射する出射部と前記光を受光する受光部とを有し、
前記設定情報は、前記出射部による光の出射に関するパラメータの情報である請求項1に記載の地物データ構造。 - 前記設定情報は、前記光のピークパワー又は前記光を出射する周期の情報である請求項2に記載の地物データ構造。
- 複数の地物を示す地物データ構造であって、
少なくとも、前記複数の地物のそれぞれを検知装置で検知するための前記検知装置における複数の設定情報が含まれる地物データ構造。 - 移動体の位置を示す位置情報を取得する第1取得部と、
前記位置情報によって示される位置の周辺に存在する地物を検知部によって検知するための前記検知部における設定に関する設定情報を取得する第2取得部と、
前記設定情報に基づいて、前記検知部を制御する制御部と、
を備える制御装置。 - 前記第2取得部は、地物ごとに前記設定情報を含む地物情報のデータベースを有するサーバ装置から、前記周辺に存在する地物に対応する前記設定情報を取得する請求項5に記載の制御装置。
- 前記検知装置は、出射方向を変えながら光を出射し、
前記地物情報には、地物ごとの位置情報が含まれ、
前記第2取得部は、前記設定情報と共に、前記地物の位置情報を取得し、
前記制御部は、前記検知部により検知すべき地物が複数存在する場合、前記地物の各々の位置情報と、前記移動体の位置情報とに基づき、前記地物の各々が存在する前記光の出射方向を特定し、特定した出射方向ごとに前記検知部に適用すべき前記設定情報を切り替える請求項5または6に記載の制御装置。 - 地物に関する地物情報を記憶する記憶装置であって、
前記地物情報には、少なくとも、前記地物を検知装置で検知するための前記検知装置における設定情報が含まれる記憶装置。 - 制御装置が実行する制御方法であって、
移動体の位置を示す位置情報を取得する第1取得工程と、
前記位置情報によって示される位置の周辺に存在する地物を検知部によって検知するための前記検知部における設定に関する設定情報を取得する第2取得工程と、
前記設定情報に基づいて、前記検知部を制御する制御工程と、
を有する制御方法。 - コンピュータが実行するプログラムであって、
移動体の位置を示す位置情報を取得する第1取得部と、
前記位置情報によって示される位置の周辺に存在する地物を検知部によって検知するための前記検知部における設定に関する設定情報を取得する第2取得部と、
前記設定情報に基づいて、前記検知部を制御する制御部
として前記コンピュータを機能させるプログラム。 - 請求項10に記載のプログラムを記憶したことを特徴とする記憶媒体。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201680081957.0A CN108700415A (zh) | 2016-02-19 | 2016-02-19 | 地物数据结构、控制装置、存储装置、控制方法、程序以及存储介质 |
| JP2017567906A JPWO2017141414A1 (ja) | 2016-02-19 | 2016-02-19 | 地物データ構造、制御装置、記憶装置、制御方法、プログラム及び記憶媒体 |
| PCT/JP2016/054806 WO2017141414A1 (ja) | 2016-02-19 | 2016-02-19 | 地物データ構造、制御装置、記憶装置、制御方法、プログラム及び記憶媒体 |
| US15/999,274 US11971487B2 (en) | 2016-02-19 | 2016-02-19 | Feature data structure, control device, storage device, control method, program and storage medium |
| EP16890555.2A EP3418686A4 (en) | 2016-02-19 | 2016-02-19 | CHARACTERISTIC STRUCTURE, CONTROL DEVICE, MEMORY DEVICE, CONTROL PROCEDURE, PROGRAM AND STORAGE MEDIUM |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2016/054806 WO2017141414A1 (ja) | 2016-02-19 | 2016-02-19 | 地物データ構造、制御装置、記憶装置、制御方法、プログラム及び記憶媒体 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017141414A1 true WO2017141414A1 (ja) | 2017-08-24 |
Family
ID=59625712
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/054806 WO2017141414A1 (ja) | 2016-02-19 | 2016-02-19 | 地物データ構造、制御装置、記憶装置、制御方法、プログラム及び記憶媒体 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11971487B2 (ja) |
| EP (1) | EP3418686A4 (ja) |
| JP (1) | JPWO2017141414A1 (ja) |
| CN (1) | CN108700415A (ja) |
| WO (1) | WO2017141414A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019064741A1 (ja) * | 2017-09-27 | 2019-04-04 | 日本電産株式会社 | 距離測定装置、および移動体 |
| CN111033303A (zh) * | 2017-09-27 | 2020-04-17 | 日本电产株式会社 | 距离测定装置、以及移动体 |
| WO2020166424A1 (ja) * | 2019-02-15 | 2020-08-20 | 日本電信電話株式会社 | 位置座標導出装置、位置座標導出方法、位置座標導出プログラム及びシステム |
| JP2020535058A (ja) * | 2017-09-25 | 2020-12-03 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツングRobert Bosch Gmbh | 高精度位置を決定し、自動運転車両を運転するための方法および装置 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102016204805A1 (de) * | 2016-03-23 | 2017-09-28 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren und Vorrichtungen zum Bereitstellen von Daten für ein Fahrerassistenzsystem eines Kraftfahrzeugs |
| PH12019050076A1 (en) * | 2019-05-06 | 2020-12-02 | Samsung Electronics Co Ltd | Enhancing device geolocation using 3d map data |
| US11754715B2 (en) * | 2019-07-11 | 2023-09-12 | Baidu Usa Llc | Point cloud format optimized for LiDAR data storage based on device property |
| CN110599853B (zh) * | 2019-08-05 | 2022-07-05 | 深圳华桥智能设备科技有限公司 | 驾校智能教学系统及方法 |
| US11675075B2 (en) * | 2019-10-15 | 2023-06-13 | Beijing Voyager Technology Co., Ltd. | Dynamic laser power control in light detection and ranging (LiDAR) systems |
| CN112698305B (zh) * | 2020-12-11 | 2023-09-22 | 上海禾赛科技有限公司 | 激光雷达通信方法和激光雷达通信系统 |
| US11859994B1 (en) * | 2021-02-18 | 2024-01-02 | Aurora Innovation, Inc. | Landmark-based localization methods and architectures for an autonomous vehicle |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005156261A (ja) * | 2003-11-21 | 2005-06-16 | Matsushita Electric Works Ltd | レーザ測距装置 |
| JP2007322138A (ja) * | 2006-05-30 | 2007-12-13 | Toyota Motor Corp | 移動装置及び移動装置の自己位置推定方法 |
| JP2010170449A (ja) * | 2009-01-26 | 2010-08-05 | Calsonic Kansei Corp | 車両用距離画像データ生成装置及び方法 |
| JP2010271166A (ja) * | 2009-05-21 | 2010-12-02 | Toyota Motor Corp | 障害物検出装置 |
| JP2012141233A (ja) * | 2011-01-04 | 2012-07-26 | Nikon Corp | 検出装置 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5170352A (en) * | 1990-05-07 | 1992-12-08 | Fmc Corporation | Multi-purpose autonomous vehicle with path plotting |
| JP3448946B2 (ja) | 1994-03-11 | 2003-09-22 | 日産自動車株式会社 | 車両周囲モニタ装置 |
| JP2003069505A (ja) | 2001-08-29 | 2003-03-07 | Allied Tereshisu Kk | 光無線通信機器及びレーザ光調整方法 |
| US20030043436A1 (en) | 2001-08-29 | 2003-03-06 | Takumi Nagai | Optical wireless communication device, laser light adjustment method, optical wireless communication system, management apparatus and a computer-readable medium storing a management program |
| JP5075331B2 (ja) | 2005-09-30 | 2012-11-21 | アイシン・エィ・ダブリュ株式会社 | 地図データベース生成システム |
| JP5190664B2 (ja) | 2007-04-25 | 2013-04-24 | 株式会社Ihi | レーザレーダ装置の測距方法 |
| EP2181415A2 (de) * | 2007-08-28 | 2010-05-05 | Valeo Schalter und Sensoren GmbH | Verfahren und anordnung zur auswertung von helligkeitswerten in sensorbildern bei bildauswertenden umfelderkennungssystemen, insbesondere hinsichtlich einer tag-/nachtunterscheidung |
| JP5256464B2 (ja) * | 2008-03-21 | 2013-08-07 | アクリーグ株式会社 | 画像上地物計測方法および表示法並びに計測装置 |
| US20090273770A1 (en) * | 2008-04-30 | 2009-11-05 | Honeywell International Inc. | Systems and methods for safe laser imaging, detection and ranging (lidar) operation |
| JP2013113684A (ja) | 2011-11-28 | 2013-06-10 | Fujitsu Ltd | 距離測定装置 |
| US9383753B1 (en) * | 2012-09-26 | 2016-07-05 | Google Inc. | Wide-view LIDAR with areas of special attention |
| US9121703B1 (en) * | 2013-06-13 | 2015-09-01 | Google Inc. | Methods and systems for controlling operation of a laser device |
| JP5991492B2 (ja) * | 2013-11-13 | 2016-09-14 | 株式会社パスコ | データ解析装置、データ解析方法、及びプログラム |
| JP6321145B2 (ja) | 2014-05-02 | 2018-05-09 | 富士フイルム株式会社 | 測距装置、測距方法、及び測距プログラム |
| CA2976344A1 (en) * | 2015-02-10 | 2016-08-18 | Mobileye Vision Technologies Ltd. | Sparse map for autonomous vehicle navigation |
| US9589355B2 (en) * | 2015-03-16 | 2017-03-07 | Here Global B.V. | Guided geometry extraction for localization of a device |
| CN104794506B (zh) * | 2015-04-14 | 2017-11-14 | 天津七一二通信广播股份有限公司 | 一种利用激光测距可自动调整发射功率的物联网终端 |
| CN105093925B (zh) * | 2015-07-15 | 2020-11-03 | 山东理工大学 | 一种基于被测地形特点的机载激光雷达参数实时自适应调整方法 |
| JP6380274B2 (ja) * | 2015-07-28 | 2018-08-29 | トヨタ自動車株式会社 | 自動運転車両用ナビゲーション装置 |
| JPWO2017060965A1 (ja) * | 2015-10-06 | 2018-06-21 | パイオニア株式会社 | 光制御装置、制御方法、プログラム及び記憶媒体 |
| US9818304B2 (en) * | 2015-10-28 | 2017-11-14 | Here Global B.V. | Method and apparatus for representing an aerial delivery path |
-
2016
- 2016-02-19 US US15/999,274 patent/US11971487B2/en active Active
- 2016-02-19 JP JP2017567906A patent/JPWO2017141414A1/ja active Pending
- 2016-02-19 EP EP16890555.2A patent/EP3418686A4/en active Pending
- 2016-02-19 WO PCT/JP2016/054806 patent/WO2017141414A1/ja active Application Filing
- 2016-02-19 CN CN201680081957.0A patent/CN108700415A/zh active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005156261A (ja) * | 2003-11-21 | 2005-06-16 | Matsushita Electric Works Ltd | レーザ測距装置 |
| JP2007322138A (ja) * | 2006-05-30 | 2007-12-13 | Toyota Motor Corp | 移動装置及び移動装置の自己位置推定方法 |
| JP2010170449A (ja) * | 2009-01-26 | 2010-08-05 | Calsonic Kansei Corp | 車両用距離画像データ生成装置及び方法 |
| JP2010271166A (ja) * | 2009-05-21 | 2010-12-02 | Toyota Motor Corp | 障害物検出装置 |
| JP2012141233A (ja) * | 2011-01-04 | 2012-07-26 | Nikon Corp | 検出装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3418686A4 * |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020535058A (ja) * | 2017-09-25 | 2020-12-03 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツングRobert Bosch Gmbh | 高精度位置を決定し、自動運転車両を運転するための方法および装置 |
| JP7000562B2 (ja) | 2017-09-25 | 2022-01-19 | ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング | 高精度位置を決定し、自動運転車両を運転するための方法および装置 |
| US11435191B2 (en) | 2017-09-25 | 2022-09-06 | Robert Bosch Gmbh | Method and device for determining a highly precise position and for operating an automated vehicle |
| WO2019064741A1 (ja) * | 2017-09-27 | 2019-04-04 | 日本電産株式会社 | 距離測定装置、および移動体 |
| CN111033303A (zh) * | 2017-09-27 | 2020-04-17 | 日本电产株式会社 | 距离测定装置、以及移动体 |
| WO2020166424A1 (ja) * | 2019-02-15 | 2020-08-20 | 日本電信電話株式会社 | 位置座標導出装置、位置座標導出方法、位置座標導出プログラム及びシステム |
| JP2020134220A (ja) * | 2019-02-15 | 2020-08-31 | 日本電信電話株式会社 | 位置座標導出装置、位置座標導出方法、位置座標導出プログラム及びシステム |
| JP7159900B2 (ja) | 2019-02-15 | 2022-10-25 | 日本電信電話株式会社 | 位置座標導出装置、位置座標導出方法、位置座標導出プログラム及びシステム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20190041523A1 (en) | 2019-02-07 |
| US11971487B2 (en) | 2024-04-30 |
| JPWO2017141414A1 (ja) | 2018-11-29 |
| EP3418686A1 (en) | 2018-12-26 |
| CN108700415A (zh) | 2018-10-23 |
| EP3418686A4 (en) | 2019-10-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2017141414A1 (ja) | 地物データ構造、制御装置、記憶装置、制御方法、プログラム及び記憶媒体 | |
| US10965099B2 (en) | Light control device, control method, program and storage medium | |
| WO2017208396A1 (ja) | 地物データ構造、記憶媒体、情報処理装置及び検出装置 | |
| EP3460779A1 (en) | Information output device, terminal device, control method, program, and storage medium | |
| US11372090B2 (en) | Light detection and range (LIDAR) device with SPAD and APD sensors for autonomous driving vehicles | |
| JP2023052460A (ja) | 検出装置、制御方法及びプログラム | |
| JP2021182009A (ja) | 光制御装置、制御方法、プログラム及び記憶媒体 | |
| WO2018180245A1 (ja) | 出力装置、制御方法、プログラム及び記憶媒体 | |
| JP2019100853A (ja) | 制御装置、検知装置、制御方法、プログラム及び記憶媒体 | |
| JP7038694B2 (ja) | 車載機、サーバ装置、及び制御方法 | |
| US20200191569A1 (en) | Geodetic stake-out system | |
| JP2011220766A (ja) | 物体認識装置 | |
| KR20200083684A (ko) | 정밀 위치 측위 시스템과 이를 이용한 자율주행차량의 주행 시스템 및 방법 | |
| JP7324925B2 (ja) | 光制御装置、制御方法、プログラム及び記憶媒体 | |
| US20240036175A1 (en) | Single photon detection based light detection and range (lidar) for autonomous driving vehicles | |
| US20220404500A1 (en) | Online lidar intensity normalization | |
| JP2019100854A (ja) | 制御装置、検知装置、制御方法、プログラム及び記憶媒体 | |
| KR102565413B1 (ko) | 차량유도장치 및 차량유도방법 | |
| CN205541022U (zh) | 一种用于客流量统计的高重频激光发射装置 | |
| JP2020073893A (ja) | 地物データ構造、記憶媒体、情報処理装置及び検出装置 | |
| KR101464122B1 (ko) | 승강장 스크린 도어(psd) 장치용 레이저 거리측정기 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16890555 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2017567906 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2016890555 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 2016890555 Country of ref document: EP Effective date: 20180919 |