WO2017022351A1 - 磁気検出装置 - Google Patents
磁気検出装置 Download PDFInfo
- Publication number
- WO2017022351A1 WO2017022351A1 PCT/JP2016/068383 JP2016068383W WO2017022351A1 WO 2017022351 A1 WO2017022351 A1 WO 2017022351A1 JP 2016068383 W JP2016068383 W JP 2016068383W WO 2017022351 A1 WO2017022351 A1 WO 2017022351A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- magnetic field
- magnetic
- wire
- coil
- component
- Prior art date
Links
- 230000005291 magnetic effect Effects 0.000 title claims abstract description 293
- 238000001514 detection method Methods 0.000 claims abstract description 79
- 239000000758 substrate Substances 0.000 claims abstract description 35
- 239000000696 magnetic material Substances 0.000 claims description 19
- 230000004907 flux Effects 0.000 description 14
- 238000000034 method Methods 0.000 description 13
- 230000035945 sensitivity Effects 0.000 description 12
- 238000012545 processing Methods 0.000 description 11
- 239000011347 resin Substances 0.000 description 11
- 229920005989 resin Polymers 0.000 description 11
- 229910045601 alloy Inorganic materials 0.000 description 10
- 239000000956 alloy Substances 0.000 description 10
- 239000000463 material Substances 0.000 description 10
- 238000004519 manufacturing process Methods 0.000 description 8
- 238000000206 photolithography Methods 0.000 description 8
- 238000007747 plating Methods 0.000 description 8
- 230000008569 process Effects 0.000 description 8
- 229910000889 permalloy Inorganic materials 0.000 description 7
- 239000007787 solid Substances 0.000 description 7
- 230000008859 change Effects 0.000 description 6
- 238000005259 measurement Methods 0.000 description 6
- 230000002093 peripheral effect Effects 0.000 description 6
- 238000004364 calculation method Methods 0.000 description 5
- 230000005389 magnetism Effects 0.000 description 5
- 238000004804 winding Methods 0.000 description 5
- 230000000694 effects Effects 0.000 description 4
- 239000010409 thin film Substances 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 3
- 229910052802 copper Inorganic materials 0.000 description 3
- 239000010949 copper Substances 0.000 description 3
- 230000010355 oscillation Effects 0.000 description 3
- 230000035699 permeability Effects 0.000 description 3
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 229910008423 Si—B Inorganic materials 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000005307 ferromagnetism Effects 0.000 description 2
- 238000010438 heat treatment Methods 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 230000009466 transformation Effects 0.000 description 2
- 241000052343 Dares Species 0.000 description 1
- 229910003271 Ni-Fe Inorganic materials 0.000 description 1
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 238000000137 annealing Methods 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 230000002500 effect on skin Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 239000003302 ferromagnetic material Substances 0.000 description 1
- 239000010408 film Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- 239000012212 insulator Substances 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 230000005415 magnetization Effects 0.000 description 1
- 230000005408 paramagnetism Effects 0.000 description 1
- 238000005498 polishing Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000032261 response to magnetism Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 229910000702 sendust Inorganic materials 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 238000005549 size reduction Methods 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/06—Measuring direction or magnitude of magnetic fields or magnetic flux using galvano-magnetic devices
- G01R33/063—Magneto-impedance sensors; Nanocristallin sensors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/0011—Arrangements or instruments for measuring magnetic variables comprising means, e.g. flux concentrators, flux guides, for guiding or concentrating the magnetic flux, e.g. to the magnetic sensor
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N50/00—Galvanomagnetic devices
- H10N50/10—Magnetoresistive devices
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N50/00—Galvanomagnetic devices
- H10N50/80—Constructional details
Definitions
- the present invention relates to a magnetic detection device (including a single “MI sensor”) that detects magnetism using a magneto-impedance element (hereinafter referred to as “MI element”).
- MI element magneto-impedance element
- Magnetic measurements have been made to know the orientation and the like.
- a three-dimensional magnetic vector is measured in order to know an accurate orientation.
- This magnetic vector is measured by a magnetic sensor.
- This magnetic sensor includes a Hall element, an MR element, and the like, but the structure and principle are completely different from such a conventional element, and an MI element that is extremely sensitive in recent years has attracted attention.
- the MI element utilizes a magneto-impedance effect (referred to as “MI effect”) in which the impedance changes according to the magnetic field due to the skin effect when a high-frequency pulse current or the like is passed through a magnetosensitive wire such as an amorphous wire.
- MI effect a magneto-impedance effect
- the change in the amount of magnetic flux generated in the magnetosensitive wire that is the origin of the MI effect is indirectly measured via a detection coil (pickup coil) wound around the magnetosensitive wire. Also, it is possible to detect a magnetic field such as an external magnetic field.
- the MI element can basically detect only the magnetic field component in the extending direction of the magnetosensitive wire. Therefore, in the conventional MI sensor, as disclosed in Patent Document 1, it is necessary to provide an MI element for each magnetic vector component to be detected.
- an X-axis MI element and a Y-axis MI element are provided on a substrate plane (XY plane), and a Z-axis MI element is perpendicular to the substrate plane. It was necessary to provide.
- This Z-axis MI element has a certain length in the Z-axis direction like the other MI elements due to its structure. For this reason, it is inherently difficult to reduce the size and thickness of the conventional three-dimensional magnetic sensor in the Z-axis direction.
- Patent Document 2 proposes that the Z-axis MI element can be omitted and the magnetic field component in the Z-axis direction can be measured by the X-axis MI element and the Y-axis MI element.
- a pair of opposed X-axis MI elements and a pair of opposed Y-axis MI elements are arranged orthogonally, and a soft magnetic material (permalloy alloy or the like) is formed at the center thereof.
- a soft magnetic material permalloy alloy or the like
- the present invention has been made in view of such circumstances, and it is desirable to provide a magnetic detection device that can be further reduced in size, increased in accuracy, improved in productivity, or reduced in production cost. Objective.
- the present inventor has changed the magnetic field redirector used in the conventional magnetic detection device from a solid structure of a soft magnetic material to a hollow structure (shell structure). ) The present invention was completed by developing this result.
- the magnetic detection device of the present invention is a magneto-impedance having a substrate, a magnetosensitive wire disposed on the substrate and sensitive to an external magnetic field component in the extending direction, and a detection coil that circulates the magnetosensitive wire.
- An element referred to as an “MI element”
- a magnetic field redirector that is disposed at least partially on or in the substrate and redirects an external magnetic field around the magnetosensitive wire.
- the magnetic field redirector includes a core portion made of a non-magnetic material and a shell portion made of a soft magnetic material that covers at least a part of the core portion. .
- the magnetic field redirector according to the present invention has a shell portion made of a soft magnetic material that covers at least a part of the outside of the core portion made of a nonmagnetic material. By this shell, the external magnetic field around the magnetosensitive wire is redirected, and even an external magnetic field component orthogonal to the magnetosensitive wire can be detected by the magnetosensitive wire.
- the magnetic field redirector (particularly the shell) according to the present invention is not a solid body of a soft magnetic material but a hollow body (shell structure), so that the volume of the soft magnetic material to be used is extremely small. Can do. Thereby, the hysteresis which arises in the magnetic field transformation body (especially shell part) which concerns on this invention is also reduced significantly.
- the magnetic field redirector according to the present invention has excellent followability to changes in the magnetic field component, and the magnetic detection device of the present invention detects an external magnetic field (particularly, a magnetic field component orthogonal to the magnetosensitive wire). Accuracy (particularly linearity) is excellent.
- the shell according to the present invention may be a thin film, it can be formed in a short time by plating a soft magnetic material using photolithography. Therefore, the magnetic detection device of the present invention is excellent in improving productivity and reducing production cost.
- the magnetic field redirector according to the present invention since the shell part according to the present invention is thin and formed in a short time, the introduced strain is not limited. For this reason, it can be said that the magnetic field redirector according to the present invention (especially the shell) does not need to be subjected to a predetermined heat treatment and is less likely to be subject to hysteresis due to strain or the like.
- the magnetic detection device of the present invention it is possible to improve detection accuracy and improve production efficiency or reduce costs at a high level.
- the “detection coil” referred to in this specification may be one in which a wire is actually wound, but if it is composed of a wiring pattern formed by photolithography or the like, the magnetic detection device can be further reduced in thickness and size. It is preferable because it can be realized.
- turning refers to changing the direction of a magnetic field component not sensitive to a magnetosensitive wire to a direction in which the magnetosensitive wire can be sensitive. As a result, at least a part of the magnetic field component that is not normally sensitive to the magnetosensitive wire can be detected by the magnetosensitive wire.
- the “external magnetic field” in the present specification is a magnetic field (environmental magnetic field) that acts on the magnetic detection device from the outside, and is a magnetic field that is an original detection target of the magnetic detection device.
- the “measurement magnetic field” is a magnetic field that can be detected or measured by the MI element in response to the magnetosensitive wire among the external magnetic fields affected by the magnetic field redirector.
- Left side”, “Right side”, “X axis (direction, component)”, “Y axis (direction, component)”, “Z axis (direction, component)”, etc. are used for convenience, unless otherwise noted. They have no special meaning such as priority.
- the direction of the magnetic field component detected by the magnetosensitive wire is referred to as a uniaxial direction (the direction in which the magnetosensitive wire extends), and the magnetic field is changed by the magnetic field redirector and detected by the uniaxial magnetosensitive wire.
- the direction of the component is called the other axis direction.
- One or two or more components arbitrarily selected from the present specification can be added to the above-described components of the present invention.
- the contents described in this specification can be applied not only to the magnetic detection device of the present invention but also to the manufacturing method thereof. Constituent elements related to the manufacturing method are fixed (when it is impossible or impractical (impossible / unpractical circumstances), etc.) to directly identify the “product” by structure or characteristics It can also be a component related to “things” as a product-by-process. Which embodiment is the best depends on the target, required performance, and the like.
- the MI element according to the present invention includes a magnetic sensing wire that can cause an impedance change and a magnetic flux amount change in response to magnetism such as an external magnetic field (magnetic field), and a detection coil that is a detection means for detecting the change amount of the magnetic sensing wire.
- the magnetosensitive wire is made of, for example, a wire (wire material) or a thin film having a corresponding length made of a soft magnetic material. Particularly in terms of sensitivity and cost, the magnetosensitive wire is preferably a zero magnetostrictive amorphous wire.
- the amorphous wire is a wire having a diameter of 1 to 30 ⁇ m made of, for example, a Co—Fe—Si—B alloy, and details are described in Japanese Patent No. 4650591.
- the magnetosensitive wire may be provided in contact with the mounting surface, floated from the mounting surface via an insulator or the like, or embedded in a groove or the like.
- the detection coil suffices if it wraps around the magnetic sensing wire in accordance with the arrangement of the magnetic sensing wire. However, if it is formed by photolithography, the MI element can be made thinner or smaller. This is preferable.
- the MI element according to the present invention does not necessarily need to be used for detecting the magnetic field component in the uniaxial direction extending in itself as long as it is used for detecting the magnetic field component in the other axis direction.
- the magnetic field components in both axial directions can be detected with one MI element.
- the magnetic field redirector changes the magnetic field component in the other axis direction intersecting the substrate on which the magnetosensitive wire is disposed in the extending direction (uniaxial direction) of the magnetosensitive wire.
- the magnetic field redirector according to the present invention is not a solid body of a soft magnetic material, but includes a core portion made of a nonmagnetic material and a shell portion made of a soft magnetic material that covers at least a part of the core portion. As long as the magnetic field component in the other axis direction is detected by the magnetosensitive wire extending in one axis direction, various forms of the shell portion or the core portion are conceivable.
- the core is preferably a columnar shape or a conical shape extending in a direction orthogonal to the magnetosensitive wire.
- at least one part of the shell part is preferably formed on the top face which is the end face of the core part on the magnetic sensing wire side (side closest to the magnetic sensing wire).
- Such a core and shell can be formed with high accuracy and efficiency by photolithography or the like.
- the shell is formed at least on the top surface, the magnetic field component in the other axis direction is stably changed in the extending direction (uniaxial direction) of the magnetosensitive wire, The magnetic field component can be easily detected.
- the non-magnetic material constituting the core of the magnetic field redirector is a material having a smaller magnetic property (permeability, saturation magnetization or magnetic susceptibility) than the soft magnetic material constituting the shell. If it dares to say, a nonmagnetic material is a material (particularly a material showing paramagnetism) that does not exhibit ferromagnetism (ferromagnetism), for example, (insulation) resin, nonmagnetic metal (copper, aluminum, or an alloy thereof) Such as ceramics. If the shell portion can be formed, the core portion may be hollow, but usually as a solid substance of insulating resin or wiring metal (Cu, Al, etc.) constituting a part of the substrate on which the MI element is mounted. A core part is formed.
- the soft magnetic material constituting the shell of the magnetic field redirector is preferably a material having a high magnetic permeability, which has a large magnetic flux collecting effect.
- a ferromagnetic material such as permalloy alloy, pure Ni, pure iron, sendust, permendur, etc. It is better to use materials.
- the shell is preferably formed with a uniform thickness on all or part of the outer surface of the core, which is a solid body. When the shell portion is formed on a part of the outer surface of the core portion, it is preferable that the shell portion is at least in a region (for example, the top surface) close to the magnetosensitive wire as described above.
- the shell part depends on the arrangement of the MI element and the magnetic field redirector, if it is formed symmetrically at least with respect to the extending direction of the MI element, it is easy to detect the magnetic field component in the other axis direction and its arithmetic processing. It is preferable.
- the magnetic field redirector according to the present invention includes a magnetic flux collecting portion that collects magnetic field components in the direction of the other axis in addition to the core portion and the shell portion. It is preferable that the magnetism collecting portion is enlarged on the side far from the magnetic sensing wire and is connected to the shell portion on the side close to the magnetic sensing wire.
- the magnetism collecting part may be a crosslinked body (crosslinked part) that bridges a plurality of shell parts. Providing such a magnetic flux collector makes it easy to detect magnetic field components in the other axis direction with high sensitivity and to expand the measurement range.
- the magnetic detection device of the present invention all or a part of the magnetic field redirecting body may have a shell structure, and various arrangement relations and the number of arrangements of the MI element and the magnetic field redirecting body are conceivable.
- the following types can be considered as the magnetic detection device of the present invention.
- the shell of the magnetic field redirector is formed symmetrically with respect to one or a plurality of MI elements. .
- the detection coil is composed of a left coil part and a right coil part that are arranged along the magnetosensitive wire, and the magnetic field changing body is disposed between the left coil part and the right coil part. Conceivable.
- the magnetic field component in the other axis direction can be obtained based on the left output obtained from the left coil part and the right output obtained from the right coil part. Detection (and calculation processing) can be performed. As a result, the height in the direction intersecting the substrate of the magnetic detection device (the height in the third axis direction) can be suppressed, and the degree of freedom in arrangement of the MI element and the degree of design in the magnetic detection device are increased. Further thinning, downsizing, high performance, etc. can be facilitated.
- Detecting magnetic field components in two directions with one MI element can be easily performed by switching between left and right output calculations. For example, when the number of turns of the left coil part and the right coil part is the same, the difference between the left output and the right output or the sum of the left output and the right output is calculated according to the winding direction of the left coil part and the right coil part. It is also possible to detect the magnetic field component of the other axis and to detect the magnetic field component in the direction of the other axis. More specifically, if the winding directions of the left coil portion and the right coil portion are the same, the magnetic field component in the other axis direction is detected based on the difference between the left output and the right output, and the uniaxial direction is determined based on the sum thereof. Are detected.
- the magnetic detection device of the present invention preferably includes an arithmetic circuit that detects a magnetic field component in each direction based on the output from each coil unit.
- the arithmetic circuit further switches between the difference between the left output and the right output and makes it possible to detect both the magnetic field component in the uniaxial direction (first axial direction) and the magnetic field component in the other axial direction (third axial direction). It is preferable to include a switching circuit.
- the left turning part and the right coil part in which the detection coil is composed of a left coil part and a right coil part that are arranged along the magnetosensitive wire, and the magnetic field changing body is disposed closer to the left coil part side. It is conceivable to have a right-side turning portion disposed on the side.
- the magnetic field diverter further has a bridging portion that bridges the left diverting portion and the right diverting portion on the side far from the magnetosensitive wire.
- the left turning portion, the bridge portion, and the right turning portion serve as yokes, and the magnetic field component that enters from one of the left turning portion or the right turning portion passes through the bridging portion.
- a magnetic circuit exiting from the other side of the right turning portion is formed.
- the bridging portion also functions as the above-described magnetic flux collecting portion, and more orthogonal components are collected and guided to the magnetic sensitive wire, which can contribute to high sensitivity of the magnetic detection device.
- a magnetic sensing wire is composed of a first wire and a second wire arranged in parallel, and a detection coil is composed of a first coil that circulates the first wire and a second coil that circulates the second wire.
- the magnetic field diverting body may have a first diverting body disposed near one end of the first wire and a second diverting body disposed near the other end of the second wire. Conceivable.
- magnetic poles are formed not only at both ends of the magnetic sensing wire but also in the middle (for example, both ends are S poles and the center is N poles).
- both ends are S poles and the center is N poles.
- the third type only magnetic poles (N pole and S pole) are formed at each one end of the magnetosensitive wire.
- the distance between magnetic poles which can be made to a magnetosensitive wire can be made longer than in the case of the 2nd type, and the influence of the demagnetizing field in the magnetosensitive wire can be suppressed accordingly. Therefore, if the lengths of the magnetic sensing wires are the same, the magnetic field component can be detected with higher sensitivity in the third type than in the second type.
- the third type one pair or more of magnetosensitive wires and detection coils are provided, so that a detection output approximately twice as large as that of the magnetic field component in the same direction can be obtained, thereby increasing the sensitivity of the magnetic detection device. easy.
- the magnetic detection device of the present invention has a first axis direction (one axis direction, eg, X axis direction) on the substrate. It is preferable to provide at least one MI element that detects a magnetic field component in a second axis direction (for example, the Y-axis direction) different from). That is, the magnetic detection device of the present invention is provided on the substrate, extends in the second axial direction different from the first axial direction, and is sensitive to the magnetic field component in the second axial direction and the second magnetic sensing wire. It is preferable to further include a second MI element including a second detection coil that circulates around the magnetic sensing wire.
- the second MI element does not necessarily have to detect a magnetic field component in the other axis direction (third axis direction, for example, the Z axis direction).
- the magnetic field component in the other axis direction can be detected more accurately by using both detection results. It becomes possible.
- a plurality of first MI elements for detecting a magnetic field component in the first axis direction and / or a plurality of second MI elements for detecting a magnetic field component in the second axis direction are arranged on the substrate. May be. Even if it is difficult to obtain sufficient sensitivity with only one, it is possible to obtain higher output and increase sensitivity by arranging a plurality of sensitivity.
- the MI element or the magnetic field redirector may be disposed only on one side of the substrate, disposed on both sides, or further disposed in the substrate.
- One or more magnetic field redirectors may be arranged for one or a pair of MI elements.
- each magnetic field redirector may have the same or different form and size.
- multiple or multiple pairs of MI elements may share one or multiple magnetic field redirectors.
- the magnetic detection device of the present invention may be an MI sensor provided with an MI element, or may be various information terminals or measurement devices provided with the MI sensor.
- the magnetic detection device of the present invention is obtained from a pulse oscillation circuit for supplying a high-frequency voltage (current) to the magnetosensitive wire, and a detection coil (particularly each coil section) in addition to the MI element including the magnetosensitive wire and the detection coil. It is preferable to include a signal processing circuit that samples and outputs the detected detection voltage, an arithmetic circuit that performs an operation based on the output, and calculates a magnetic field component in each direction.
- the magnetic detection device of the present invention is an MI sensor
- the MI sensor can be made thinner and smaller. It is possible to achieve.
- the mounting of the MI element on the substrate is preferable according to flip bonding, in particular wafer level CSP (Wafer Level Chip Size Package), in addition to wire bonding, because the MI sensor can be further reduced in thickness and size.
- wafer level CSP Wafer Level Chip Size Package
- the magnetic detection device of the present invention can be obtained, for example, through a process of mounting an MI element on a built-in base substrate having a built-in magnetic field redirecting body corresponding to the arrangement of the magnetic field redirecting body.
- the built-in base substrate is obtained through a step of forming a magnetic field changing body and a step of forming a resin layer in which the magnetic field changing body is embedded using photolithography or the like.
- the magnetic field redirector is formed by a step of forming a core made of a nonmagnetic material (resin or copper) and a step of forming a shell made of a soft magnetic material on the outer surface of the core (for example, a plating step). ) And obtained.
- MI sensor Magnetic Infrared Sensor
- a small magnetic detection device is obtained by dividing (dicing) a mounting substrate on which a large number of MI elements are mounted on a built-in base substrate that includes a large number (plurality) of magnetic field redirectors. Is efficiently produced.
- FIG. 2A shows a partial cross-sectional view taken along the line AA shown in FIG. 1 and magnetic flux lines acting on the Z-axis direction (the other axis direction, the third axis direction). Further, a detailed plan view of the portion shown in FIG. 2A is shown in FIG. 2B.
- the MI sensor 1 includes four MI elements M1 to M4 for detecting an external magnetic field such as geomagnetism, magnetic field redirectors F1 to F4, MI elements M1 to M4, and built-in magnetic field redirectors F1 to F4.
- Circuit board S (corresponding to “substrate” in the present invention).
- an integrated circuit including a pulse transmission circuit (drive circuit), a signal processing circuit, an arithmetic circuit, and the like necessary for driving each MI element is also formed.
- ASIC application specific integrated circuit
- driving circuit a pulse transmission circuit
- signal processing circuit a signal processing circuit
- arithmetic circuit arithmetic circuit, and the like necessary for driving each MI element.
- each MI element and the integrated circuit in the circuit board S are electrically connected via bumps. This realizes a wafer level CSP in which wire bonding is omitted.
- each circuit or the like is formed by photolithography.
- MI elements M1 to M4 are mounted on the circuit board S in a square shape by flip chip. Then, the MI elements M1 and M3 mounted in parallel with the X-axis direction detect the magnetic field component (simply referred to as “X component”) in the X-axis direction (uniaxial direction or first axial direction), and the Y-axis direction (second A magnetic field component in the Y-axis direction (simply referred to as “Y component”) can be detected by the MI elements M2 and M4 mounted in parallel in the axial direction. Then, magnetic field components in the Z-axis direction (simply referred to as “Z component”) can be detected by the MI elements M1 to M4 by the magnetic field redirectors F1 to F4 arranged on the center lines of the MI elements.
- X component magnetic field component
- Y component second A magnetic field component in the Y-axis direction
- Z component magnetic field components in the Z-axis direction
- MI element M1 and the magnetic field redirector F1 will be described as representatives as appropriate.
- a description of M2 to M4 and the magnetic field redirectors F2 to F4 is omitted.
- the MI element M1 includes a magnetic sensing wire W1, a detection coil C1 wound around the magnetic sensing wire W1, and a terminal group T1 connected to the magnetic sensing wire W1 and the detection coil C1, as shown in FIG. 2B.
- the magnetosensitive wire W1 is a zero magnetostrictive amorphous wire made of a Co—Fe—Si—B alloy.
- the detection coil C1 includes a left coil part C11 and a right coil part C12.
- the left coil portion C11 and the right coil portion C12 have the same specifications that affect the magnitude of output, such as the number of turns, the winding diameter, the winding direction, and the pitch, and the center position (the center axis of the magnetic field redirector F1 passes through) Point).
- Each coil part C11, C12 and terminal group T1 are formed on the circuit board S using photolithography.
- the terminal group T1 is generated at terminals T101 and T102 for supplying a pulse signal to the magnetic sensing wire W1, terminals T111 and T112 for outputting an electromotive force (V11) generated at the left coil part C11, and a right coil part C12.
- Terminal T121, T122 which outputs the electromotive force (V12).
- the magnetic field redirector F1 includes a columnar or truncated cone-shaped core portion F10 made of an insulating resin, a thin-film shell portion F11 that covers the side peripheral surface F101 and the top surface F102 of the core portion F10, and a core portion. It consists of the enlarged part F13 extended on the bottom face side (opposite face side of the top face F102) of F10.
- the magnetic field redirector F1 changes the Z component flux lines as shown in FIG. 2A.
- the Z component is collected by the enlarged portion F13, passes through the peripheral side portion of the shell portion F11, and radiates from the top surface portion of the shell portion F11 toward the MI element M1 (equally in the left-right direction). To spread).
- the Z component can be detected by the MI element M1 as a result of being changed in the extending direction (X-axis direction) of the magnetosensitive wire W1 by the magnetic field changing body F1.
- the integrated circuit (ASIC) formed on the circuit board S includes a pulse transmission circuit (driving circuit) that supplies a pulse signal to the magnetosensitive wire W1, and an output (voltage) from the left coil portion C11.
- a signal processing circuit for obtaining V11 and an output (voltage) V12 from the right coil portion C12 and an arithmetic circuit (including a switching circuit) are included.
- the pulse transmission circuit and signal processing circuit operate as follows. First, a high-frequency (for example, equivalent to 200 MHz) pulse current generated by the pulse oscillation circuit is supplied to the magnetosensitive wire W1. A magnetic field generated in the wire circumferential direction of the magnetosensitive wire W1 by this pulse current and an external magnetic field act, and a voltage corresponding to the magnetic field component acting in the axial direction is generated in the left coil part C11 and the right coil part C12. To do. Note that the frequency here is obtained by calculating the “rise” or “fall” time ⁇ t of the pulse current waveform pulse shown in FIG. 4A, and that ⁇ t corresponds to a quarter period as shown in FIG. 4B. It is a thing.
- the analog switch is turned on and off for a short time at a predetermined timing. Accordingly, the analog switch samples each voltage generated in the left coil portion C11 and the right coil portion C12. The sampling voltages are respectively amplified by amplifiers to obtain outputs V11 and V12. It is also possible to obtain V11 and V12 by processing when the pulse current is interrupted instead of rising (when the pulse current falls).
- the arithmetic circuit alternately calculates the sum and difference of the output V11 and the output V12, performs an output indicating the X component (magnetic field component in one axis direction) of the external magnetic field based on the sum of the output V11 and the output V12, and outputs the output V11. Based on the difference of the output V12, an output for indicating the Z component (magnetic field component in the other axis direction) of the external magnetic field is performed. The reason why an output indicating the X component and the Z component by the sum and difference can be performed will be described below.
- the magnetic field redirector F1 is disposed at the center of the symmetrical left coil portion C11 and right coil portion C12 of the MI element M1.
- the influence of the magnetic field redirector F1 on the output of each coil section is also symmetric.
- the turning magnetic field component measured magnetic field / magnetic vector H
- the left coil portion C11 and the right coil portion C12 are as described above.
- the specifications that affect the output size are all the same.
- the output difference (V11 ⁇ V12) between the output V11 of the left coil portion C11 and the output V12 of the right coil portion C12 is influenced by the X-axis direction component of the original external magnetic field generated around the MI element M1. Is offset, and only the influence of the additional X component (Hx) of the diverting magnetic field component acting in the opposite direction on the left coil portion C11 and the right coil portion C12 is reflected.
- the magnetosensitive wire W1 does not respond to the Z component (Hz) of the diverting magnetic field component, it naturally does not affect the output difference. If the output difference is multiplied by an appropriate coefficient, the Z component of the original external magnetic field can be obtained from the output difference.
- the output sum (V11 + V12) of the output V11 and the output V12 cancels the influence of the X component (Hx) of the turning magnetic field component, and has no influence of the Z component (Hz) of the turning magnetic field component as described above. Only the influence of the additional X component (projection component in the X-axis direction) of the magnetic field component generated when the X component of the original external magnetic field is redirected by the magnetic field redirector F1 is reflected. If the output sum is multiplied by an appropriate coefficient, the X component of the original external magnetic field can be obtained from the output sum. Such a situation also applies to the MI element M3. Further, with the same concept, the Y component and the Z component can be detected by the MI element M2 and the MI element M4.
- the component in each axial direction of the external magnetic field is calculated based on an average value (for example, an arithmetic average) of outputs of a plurality of MI elements without depending on only the output of one MI element.
- an appropriate correction coefficient or correction term can be added to the output value in consideration of the shape of the magnetic field redirector, the arrangement and characteristics of the MI element, and the like.
- Such arithmetic processing may be performed by the arithmetic circuit described above, or may be performed by a program such as an information terminal in which the MI sensor 1 is mounted. The basic concept regarding the arithmetic processing is also described in detail in WO2010 / 110456.
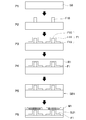
- the circuit board S having the built-in magnetic field redirector F1 is manufactured through, for example, the process shown in FIG. Specifically, first, a base substrate S0 is prepared in which a large number of integrated circuits including the above-described pulse oscillation circuit, signal processing circuit, and arithmetic circuit are formed on a silicon wafer (step P1).
- a post made of an insulating resin to be the core F10 is formed on the base substrate S0 (process P2).
- a permalloy alloy plating layer to be the enlarged part F13 and the shell part F11 is formed (process P3).
- plating steps are also performed by photolithography.
- a slight internal stress (or internal strain) introduced into the formed shell portion F11 and enlarged portion F13 may be removed by heat treatment (annealing) after the plating step.
- An insulating resin layer R1 surrounding the magnetic field changing body F1 formed on the base substrate S0 is formed by a resin mold (step P4).
- the upper end surface of the insulating resin layer R1 is polished and flattened (process P5). After this polishing, permalloy alloy plating may be further performed to adjust the film thickness on the top surface side (upper end surface side) of the shell F11 to a desired value.
- the built-in base substrate SB1 including the magnetic field redirector F1 is obtained.
- the MI element M1 is mounted on the built-in base substrate SB1 by flip chip or the like (process P6 / mounting process). Thereafter, the other surface side of the built-in base substrate SB1 is polished (back grind) or the like. In this way, the combined base substrate SU1 is obtained.
- a large number of MI sensors 1 can be obtained by dicing the combined base substrate SU1 (dividing step). Each MI sensor may be formed on the surface of the built-in base substrate SB1 or the like by a method described in detail in WO2014 / 054371 or the like.
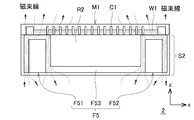
- FIGS. 6A and 6B Sectional views of the MI sensor 2 according to the second embodiment are shown in FIGS. 6A and 6B.
- FIG. 6C is a perspective view schematically showing the arrangement relationship among the magnetosensitive wire W1, the detection coil C1, and the magnetic field redirector F5 that are the main parts of the MI sensor 2. 6A to 6C are collectively referred to as FIG.
- symbol was attached
- the magnetic field redirector F5 includes a plate-shaped bridging portion F53 (enlarged portion or magnetism collecting portion), a prismatic left-side turning portion F51 standing upright from the left end of the bridging portion F53, and an upright from the right end of the bridging portion F53. And a right-side turning portion F52 having a prismatic shape.
- the left turning portion F51 includes a core portion F510 and a thin-film shell portion F511 that covers the top surface and the side peripheral surface of the core portion F510.
- the shell portion F511 and the bridging portion F53 are continuous on the bottom surface side of the core portion F510.
- the right turning portion F52 includes a core portion F520 and a thin film-shaped shell portion F521 that covers the top surface and the side peripheral surface of the core portion F520.
- the shell part F521 and the bridging part F53 are also connected on the bottom surface side of the core part F520.
- the shell part F511, the shell part F521, and the bridge part F53 are made of the soft magnetic material (permalloy alloy) described above.
- the core part F510 and the core part F520 are made of the insulating resin described above.
- the external magnetic field that acts on the MI element M1 is redirected by the magnetic field redirector F5 like the magnetic flux lines shown in FIGS. 6A and 6B. Specifically, as shown in FIG. 6A, only a part of the external magnetic field component (extension component) in the extending direction (X direction) of the magnetosensitive wire W1 is introduced into the magnetosensitive wire W1, Most of them bypass the magnetosensitive wire W1 via the right turning portion F52, the bridging portion F53, and the left turning portion F51.
- the bridging portion F53 As shown in FIG. 6B, the left turning portion F51 and the right turning portion. It branches to F52 and is introduced into the magnetosensitive wire W1 from the upper end surface side (the opposite surface side of the bridging portion F53) of the left turning portion F51 and the right turning portion F52. Then, a part of the orthogonal component changed in the extending direction of the magnetosensitive wire W1 is detected by the MI element M1.
- the left turning portion F51 and the right turning portion F52 are arranged symmetrically with respect to the center of the magnetosensitive wire W1, and have the same size and a symmetrical shape. For this reason, each of the orthogonal component of the orthogonal component introduced to the magnetic sensing wire W1 via the left deflection portion F51 and the right deflection portion F52 is also symmetric (in the opposite direction, the size is equal).
- the X component of the external magnetic field can be detected based on the sum of the output V11 and the output V12 obtained from the MI element M1, and the output V11 and the output V12. Based on the difference, the Z component of the external magnetic field can be detected.
- part of the extension component and the orthogonal component of the original external magnetic field are redirected by the magnetic field redirector F5 and guided to the magnetosensitive wire W1. For this reason, the level difference between the outputs (V11 + V12 and V11 ⁇ V12) obtained by the left coil part C11 and the right coil part C12 is small.
- both the extended component and the orthogonal component of the external magnetic field can be measured with appropriate sensitivity and in a wide range.
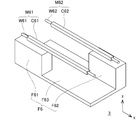
- FIG. 7A A sectional view of the MI sensor 3 according to the third embodiment is shown in FIG. 7A. Further, FIG. 7B is a perspective view schematically showing the arrangement relationship between the magnetosensitive wires W61 and W62, the detection coils C61 and C62, and the magnetic field changing body F6, which are the main parts of the MI sensor 3. 7A and 7B are collectively referred to as FIG. 7 as appropriate.
- the MI sensor 3 is different from the MI sensor 2 in that the magnetic field changing body F5 is changed to the magnetic field changing body F6 and the MI element M1 is changed to MI elements M61 and M62.
- the MI element M61 has a magnetic sensing wire W61 and a detection coil C61 wound around it
- the MI element M62 has a magnetic sensing wire W62 and a detection coil C62 wound around it.
- the detection coil C61 and the detection coil C62 correspond to the left coil portion C11 and the right coil portion C12 of the MI element M1, respectively, but they are not divided in the middle, and are surrounded by the magnetic sensing wire W61 and the magnetic sensing wire W62. Are formed independently.
- the magnetic field changing body F6 includes a plate-like cross-linked body F63 (enlarged portion or magnetic flux collecting section), a first prism-shaped first diverting body F61 standing upright from the left end corner of the cross-linked body F63, and a right end angle of the cross-linked body F63.
- Second prism F2 having a prismatic shape upright from the portion.
- the first turning portion F61 includes a core portion F610 (not shown) and a thin film-like shell portion F611 (not shown) that covers the top surface and the side peripheral surface of the core portion F610.
- the shell part F611 and the bridging part F63 are continuous on the bottom side of the core part F610.
- the second turning portion F62 includes a core portion F620 and a thin film-shaped shell portion F621 that covers the top surface and the side peripheral surface of the core portion F620.
- the shell portion F621 and the bridging portion F63 are continuous on the bottom surface side of the core portion F620.
- the shell part F611, the shell part F621, and the bridging part F63 are made of the soft magnetic material (permalloy alloy) described above.
- the core part F610 and the core part F620 are made of the insulating resin described above.
- the orientation is slightly different from that of the magnetic field redirector F5. More specifically, first, the external magnetic field component (extension component) in the extending direction (X direction) of the magnetosensitive wires W61 and W62 is changed, and a part thereof is introduced into the magnetosensitive wires W61 and W62. The Next, the external magnetic field component (orthogonal component) in the orthogonal direction (Z direction) is collected by the bridge F63, and is branched (converged) into the first deflector F61 and the second deflector F62. It changes from the upper end surface side toward the center of the magnetosensitive wires W61 and W62. A further part (Hx) of the diverting magnetic field component (H) is introduced into the magnetosensitive wires W61 and W62.
- the first diverting body F61 and the second diverting body F62 are respectively disposed only on one end sides of the magnetic sensitive wires W61 and W62.
- the magnetic sensing wire W62 as shown in FIG. 7A, an S pole is formed on one end side, an N pole is formed on the other end side, and no magnetic pole is formed in the middle.
- the distance between the magnetic poles formed on W62 becomes longer.
- there are the left turning portion F51 and the right turning portion F52 at both ends of the magnetosensitive wire W1 as in the MI sensor 2 for example, there are S poles at both ends of the magnetosensitive wire W1, and N between them. A pole is formed, and the distance between the magnetic poles is shortened.
- the MI sensor 3 is less affected by the demagnetizing field acting on the magnetosensitive wires W61 and W62, and is more sensitive than the MI sensor 2.
- the MI sensor 3 since the MI sensor 3 includes a pair of a pair of magnetosensitive wires and a detection coil arranged in parallel, the external magnetic field can be measured with higher sensitivity.
- the MI element M61 and the first diverting body F61, and the MI element M62 and the second diverting body F62 are symmetrically arranged and formed around the central axis of the bridging body F63. Therefore, the MI sensor 3 can detect the extended component and the orthogonal component of the external magnetic field by the same calculation method as that of the MI sensor 2.
Landscapes
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Engineering & Computer Science (AREA)
- Nanotechnology (AREA)
- Measuring Magnetic Variables (AREA)
- Hall/Mr Elements (AREA)
Abstract
小型化・薄型化のみならず高精度化も図れる磁気検出装置を提供することを目的とする。 本発明の磁気検出装置(1)は、基板(S1)と、基板に配設され、延在方向の外部磁場成分に感応する感磁ワイヤー(W1)と感磁ワイヤーを周回する検出コイル(C1)とを有するMI素子と、感磁ワイヤーの周囲の外部磁場を変向する磁場変向体(F1)を備える。本発明に係る磁場変向体は、非磁性材からなる芯部(F10)と、芯部の少なくとも一部の外側を覆う軟磁性材からなる殻部(F11)とを有する。このように磁場変向体が軟磁性材の中実構造ではなく、中空構造となっているため、従来よりも軟磁性材のボリュームが大幅に低減され、磁場変向体に生じるヒステリシスも大幅に縮小される。このため本発明の磁気検出装置によれば、基板に直交する磁場成分もより高精度に検出される。
Description
本発明は、マグネトインピーダンス素子(Magneto-Impedance element:「MI素子」という。)により磁気を検出する磁気検出装置(「MIセンサ」単体を含む。)に関する。
従来より方位等を知るために磁気測定がなされている。例えば、電子コンパスなどでは、正確な方位を知るために3次元の磁気ベクトルが測定されている。この磁気ベクトルの測定は磁気センサによりなされる。この磁気センサには、ホール素子、MR素子等もあるが、このような従来の素子とは構造や原理が全く異なり、桁違いに高感度なMI素子が近年注目されている。
MI素子は、アモルファスワイヤー等の感磁ワイヤーに高周波のパルス電流等を流すと、表皮効果によりそのインピーダンスが磁場に応じて変化するマグネトインピーダンス効果(「MI効果」という。)を利用したものである。そのインピーダンス変化を直接的に測定する他、そのMI効果の起源となる感磁ワイヤーに生じる磁束量の変化を、その感磁ワイヤーの周囲に巻回した検出コイル(ピックアップコイル)を介して間接的に測定することによっても、外部磁場等の磁気検出が可能となる。
もっとも、MI素子は、基本的に感磁ワイヤーの延在する方向の磁場成分しか検出できない。このため従来のMIセンサでは、特許文献1にもあるように、検出する磁気ベクトルの成分ごとにMI素子を個別に設ける必要があった。例えば、外部磁場の三次元成分を計測する場合、基板平面(X-Y平面)上にX軸用MI素子とY軸用MI素子を設けると共に、その基板平面の垂直方向にZ軸用MI素子を設ける必要があった。このZ軸用MI素子は、その構造上、他のMI素子と同様にZ軸方向にある程度の長さを有する。このため従来の三次元磁気検出装置では、Z軸方向の小型化、薄型化が本来的に困難であった。
しかし、MI素子を組み込んだMIセンサは、既に、各種の携帯情報端末等に組み込まれており、その高性能化(高感度化、高精度化)と共に、さらなる小型化が強く要請されている。そこで、Z軸用MI素子を省略して、X軸用MI素子とY軸用MI素子によりZ軸方向の磁場成分を計測可能とする提案が特許文献2でなされている。
特許文献2の磁気検出装置は、例えば、対向した一対のX軸用MI素子と対向した一対のY軸用MI素子を直交配置すると共に、それらの中心に軟磁性材(パーマロイ合金等)からなる中実の磁場変向体を設け、各MI素子から得られる検出電圧を演算することにより、Z軸用MI素子を用いることなく、Z軸方向の磁場成分の検出を可能としている。これにより特許文献2の磁気検出装置によれば、その大幅な小型化が可能となる。もっとも本発明者が鋭意検討したところ、その小型化、高精度化、生産性の向上等がさらに可能であることもわかった。
本発明はこのような事情に鑑みて為されたものであり、小型化、高精度化、生産性の向上または生産コストの低減等をさらに図ることが可能となる磁気検出装置を提供することを目的とする。
本発明者はこの課題を解決すべく鋭意研究し、試行錯誤を重ねた結果、従来の磁気検出装置で用いられていた磁場変向体を、軟磁性材の中実構造から中空構造(シェル構造)とすることを思いついた。この成果を発展させることにより本発明は完成された。
《磁気検出装置》
(1)すなわち本発明の磁気検出装置は、基板と、該基板に配設され、延在方向の外部磁場成分に感応する感磁ワイヤーと該感磁ワイヤーを周回する検出コイルとを有するマグネトインピーダンス素子(「MI素子」という。)と、該基板上または該基板内に少なくとも一部が配設されており、該感磁ワイヤーの周囲の外部磁場を変向する磁場変向体と、を備える磁気検出装置であって、前記磁場変向体は、非磁性材からなる芯部と、該芯部の少なくとも一部の外側を覆う軟磁性材からなる殻部と、を有することを特徴とする。
(1)すなわち本発明の磁気検出装置は、基板と、該基板に配設され、延在方向の外部磁場成分に感応する感磁ワイヤーと該感磁ワイヤーを周回する検出コイルとを有するマグネトインピーダンス素子(「MI素子」という。)と、該基板上または該基板内に少なくとも一部が配設されており、該感磁ワイヤーの周囲の外部磁場を変向する磁場変向体と、を備える磁気検出装置であって、前記磁場変向体は、非磁性材からなる芯部と、該芯部の少なくとも一部の外側を覆う軟磁性材からなる殻部と、を有することを特徴とする。
(2)本発明に係る磁場変向体は、非磁性材からなる芯部の少なくとも一部の外側を覆う軟磁性材からなる殻部を有する。この殻部により、感磁ワイヤーの周囲にある外部磁場は変向され、感磁ワイヤーに直交する外部磁場成分でも、その感磁ワイヤーにより検出可能となる。
ところで、本発明に係る磁場変向体(特に殻部)は、軟磁性材の中実体ではなく、中空体(シェル構造体)からなるため、使用する軟磁性材のボリュームを非常に小さくすることができる。これにより、本発明に係る磁場変向体(特に殻部)に生じるヒステリシスも大幅に低減される。この結果、本発明に係る磁場変向体は、磁場成分の変化に対する追従性に優れたものとなり、本発明の磁気検出装置は、外部磁場(特に感磁ワイヤーに直交する磁場成分)を検出する際の精度(特に直線性)が優れたものとなる。
また本発明に係る殻部は、薄膜状でもよいため、フォトリソグラフィを用いた軟磁性材のメッキ等により短時間で形成され得る。従って本発明の磁気検出装置は、生産性の向上や生産コストの低減にも優れたものである。
さらに、長時間のメッキ等により中実構造の磁場変向体を形成する場合、その磁場変向体には歪み(応力)が導入され易い。これに対して本発明に係る殻部は、薄くて短時間に形成されるため、導入される歪みも少なくない。このため本発明に係る磁場変向体(特に殻部)には、所定の熱処理を施すまでもなく、そもそも歪み等に起因したヒステリシスが生じ難いともいえる。こうして本発明の磁気検出装置によれば、検出精度の向上と生産効率の向上または低コスト化等とを、高次元で両立させることが可能となる。
《その他》
本明細書でいう「検出コイル」は、ワイヤーを実際に巻回したものでもよいが、フォトリソグラフィ等により形成された配線パターンより構成されたものであると、磁気検出装置のさらなる薄型化、小型化等を図れて好ましい。
本明細書でいう「検出コイル」は、ワイヤーを実際に巻回したものでもよいが、フォトリソグラフィ等により形成された配線パターンより構成されたものであると、磁気検出装置のさらなる薄型化、小型化等を図れて好ましい。
本明細書でいう「変向」とは、感磁ワイヤーによって感応されない磁場成分の方向を、その感磁ワイヤーが感応し得る方向へ変えることをいう。これにより、本来なら感磁ワイヤーに感応しない磁場成分の少なくとも一部が、その感磁ワイヤーで検出可能となる。
本明細書でいう「外部磁場」とは、外部から磁気検出装置へ作用する磁場(環境磁場)であって、磁気検出装置の本来的な検出対象となる磁場である。「測定磁場」とは、磁場変向体により影響を受けた外部磁場のうちで、実際に感磁ワイヤーに感応してMI素子により検出または測定され得る磁場である。
本明細書では、各部材や各部を区別して説明のために、「第1」、「第2」、「第3」、「一方」、「他方」、「一面側」、「他面側」、「左側」、「右側」、「X軸(方向、成分)」、「Y軸(方向、成分)」、「Z軸(方向、成分)」等を便宜的に用いるが、特に断らない限り、それらに優先順位などの特別な意味はない。また適宜、感磁ワイヤーにより検出される磁場成分の方向を一軸方向(感磁ワイヤーの延在方向)といい、磁場変向体により変向されてその一軸方向の感磁ワイヤーに検出される磁場成分の方向を他軸方向という。
上述した本発明の構成要素に、本明細書中から任意に選択した一つまたは二つ以上の構成要素を付加し得る。本明細書で説明する内容は、本発明の磁気検出装置のみならず、その製造方法にも該当し得る。製造方法に関する構成要素は、一定の場合(構造または特性により「物」を直接特定することが不可能であるかまたは非実際的である事情(不可能・非実際的事情)等がある場合)、プロダクトバイプロセスとして「物」に関する構成要素ともなり得る。いずれの実施形態が最良であるか否かは、対象、要求性能等によって異なる。
《MI素子》
本発明に係るMI素子は、外部磁場(磁界)などの磁気に感応してインピーダンス変化や磁束量変化を生じ得る感磁ワイヤーと、その感磁ワイヤーの変化量を検出する検出手段である検出コイルを有する。感磁ワイヤーは、例えば、軟磁性材からなる相応な長さを有するワイヤー(線材)または薄膜からなる。特に感度やコスト等の点で、感磁ワイヤーは零磁歪のアモルファスワイヤーが好ましい。このアモルファスワイヤーは、例えば、Co-Fe-Si-B系合金からなる直径1~30μmのワイヤーであり、特許第4650591号公報等に詳細が記載されている。
本発明に係るMI素子は、外部磁場(磁界)などの磁気に感応してインピーダンス変化や磁束量変化を生じ得る感磁ワイヤーと、その感磁ワイヤーの変化量を検出する検出手段である検出コイルを有する。感磁ワイヤーは、例えば、軟磁性材からなる相応な長さを有するワイヤー(線材)または薄膜からなる。特に感度やコスト等の点で、感磁ワイヤーは零磁歪のアモルファスワイヤーが好ましい。このアモルファスワイヤーは、例えば、Co-Fe-Si-B系合金からなる直径1~30μmのワイヤーであり、特許第4650591号公報等に詳細が記載されている。
感磁ワイヤーは、搭載面に接して設けられても、絶縁体等を介して搭載面から浮上して設けられても、さらには溝などに埋設されてもよい。検出コイルは、そのような感磁ワイヤーの配設態様に応じて、感磁ワイヤーを周回するものであれば足りるが、フォトリソグラフィにより形成されたものであると、MI素子の薄型化または小型化を図れて好ましい。
なお、本発明に係るMI素子は、他軸方向の磁場成分の検出に利用される限り、必ずしも、それ自身の延在する一軸方向の磁場成分の検出に利用される必要はない。但し、磁気検出装置の薄型化、小型化、低コスト化等を考慮すると、一つのMI素子で、両軸方向の磁場成分がそれぞれ検出可能であると好ましい。
《磁場変向体》
磁場変向体は、感磁ワイヤーが配設された基板に交差する他軸方向の磁場成分を、感磁ワイヤーの延在方向(一軸方向)へ変向する。本発明に係る磁場変向体は、軟磁性材の中実体ではなく、非磁性材からなる芯部と、芯部の少なくとも一部の外側を覆う軟磁性材からなる殻部とからなる。一軸方向に延在する感磁ワイヤーにより他軸方向の磁場成分が検出される限り、殻部または芯部の形態は種々考えられる。
磁場変向体は、感磁ワイヤーが配設された基板に交差する他軸方向の磁場成分を、感磁ワイヤーの延在方向(一軸方向)へ変向する。本発明に係る磁場変向体は、軟磁性材の中実体ではなく、非磁性材からなる芯部と、芯部の少なくとも一部の外側を覆う軟磁性材からなる殻部とからなる。一軸方向に延在する感磁ワイヤーにより他軸方向の磁場成分が検出される限り、殻部または芯部の形態は種々考えられる。
例えば、芯部は、感磁ワイヤーに対して直交する方向に延在する柱状または円錐状であると好ましい。そして殻部は、少なくとも一部が、その芯部の感磁ワイヤー側(感磁ワイヤーに最も近い側)の端面である頂面に形成されていると好ましい。このような芯部や殻部はフォトリソグラフィ等による高精度かつ効率的に形成可能である。また、少なくとも頂面に殻部が形成されていることにより、他軸方向の磁場成分が感磁ワイヤーの延在方向(一軸方向)へ安定的に変向され、感磁ワイヤーによる他軸方向の磁場成分の検出が容易となる。
磁場変向体の芯部を構成する非磁性材は、殻部を構成する軟磁性材よりも磁気特性(透磁率、飽和磁化または磁化率)が小さい材質である。敢えていうなら非磁性材は、強磁性(フェロ磁性)を示さない材質(特に常磁性を示す材質)であり、例えば、(絶縁)樹脂、非磁性金属(銅、アルミニウムまたはそれらの合金等)、セラミックスなどである。なお、殻部の形成が可能ならば、芯部は空洞でもよいが、通常、MI素子が搭載される基板の一部を構成する絶縁樹脂や配線用金属(Cu、Al等)の中実体として芯部は形成される。
磁場変向体の殻部を構成する軟磁性材は、高透磁率なものほど、集磁効果が大きくて好ましく、例えば、パーマロイ合金、純Ni、純鉄、センダスト、パーメンジュール等の強磁性材を用いるとよい。殻部は、中実体である芯部の外表面の全部または一部に均一的な厚さで形成されていると好ましい。殻部が芯部の外表面の一部に形成されている場合、前述したように、少なくとも感磁ワイヤーに近接した領域(例えば頂面)にあると好ましい。また殻部は、MI素子と磁場変向体の配置にも依るが、少なくともMI素子の延在方向に関して対称的に形成されていると、他軸方向の磁場成分の検出やその演算処理も容易となり好ましい。
本発明に係る磁場変向体は、芯部および殻部以外に、他軸方向の磁場成分を集磁する集磁部を備えると好ましい。集磁部は、感磁ワイヤーに遠い側で拡大しており、感磁ワイヤーに近い側にある殻部に連なっていると好ましい。また集磁部は、複数の殻部を架橋する架橋体(架橋部)でもよい。このような集磁部を設けることにより、他軸方向の磁場成分を高感度に検出したり、測定レンジを拡大したりし易くなる。
《磁気検出装置》
(1)本発明の磁気検出装置は、磁場変向体の全部または一部がシェル構造であればよく、MI素子と磁場変向体の配置関係や配設数等は種々考えられる。例えば、本発明の磁気検出装置として、次のようなタイプが考えられる。なお、いずれの場合でも、他軸方向の磁場成分の検出やその演算処理を容易に行うため、磁場変向体の殻部は、単数または複数のMI素子に関して対称的に形成されていると好ましい。
(1)本発明の磁気検出装置は、磁場変向体の全部または一部がシェル構造であればよく、MI素子と磁場変向体の配置関係や配設数等は種々考えられる。例えば、本発明の磁気検出装置として、次のようなタイプが考えられる。なお、いずれの場合でも、他軸方向の磁場成分の検出やその演算処理を容易に行うため、磁場変向体の殻部は、単数または複数のMI素子に関して対称的に形成されていると好ましい。
第1タイプとして、検出コイルが感磁ワイヤーに沿って並存する左側コイル部と右側コイル部とからなり、磁場変向体が左側コイル部と右側コイル部の中間上に配設されている場合が考えられる。
この場合、一対のMI素子を設けるまでもなく、一つのMI素子で、その左側コイル部から得られる左側出力とその右側コイル部から得られる右側出力とに基づいて、他軸方向の磁場成分を検出(さらには演算処理)することが可能となる。これにより、磁気検出装置の基板に交差する方向の高さ(第3軸方向の高さ)を抑制できることは勿論、MI素子の配置自由度や磁気検出装置の設計自由度も高まり、磁気検出装置のさらなる薄型化、小型化、高性能化等を図ることが容易となり得る。
一つのMI素子による二方向の磁場成分の検出は、左側出力と右側出力の演算を切り替えることにより容易に行うことができる。例えば、左側コイル部と右側コイル部の巻数が同じである場合、左側コイル部と右側コイル部の巻回方向に応じて、左側出力と右側出力の差または和を切り替えて演算することにより一軸方向の磁場成分を検出することも、他軸方向の磁場成分を検出することも可能となる。より具体的にいうと、左側コイル部と右側コイル部の巻回方向が同じなら、左側出力と右側出力の差に基づいて他軸方向の磁場成分が検出され、それらの和に基づいて一軸方向の磁場成分が検出される。各コイル部の巻回方向(または配線方法)が逆の場合は、各出力の演算も逆に行えば、同様な結果を得ることができる。このように本発明の磁気検出装置は、各コイル部からの出力に基づいて、各方向の磁場成分を検出する演算回路を備えると好適である。この演算回路は、さらに、左側出力と右側出力の差と和を切り替えて、一軸方向(第1軸方向)の磁場成分と他軸方向(第3軸方向)の磁場成分を共に検出可能とする切替回路を含むと好ましい。
第2タイプとして、検出コイルが感磁ワイヤーに沿って並存する左側コイル部と右側コイル部とからなり、磁場変向体が左側コイル部側寄りに配設される左側変向部と右側コイル部側寄りに配設される右側変向部とを有する場合が考えられる。
この場合、外部磁場の延在成分(感磁ワイヤーの延在方向の磁場成分)の一部は、左側変向部または右側変向部の一方から入って他方から出るようになり、感磁ワイヤーを迂回するようになる。このため、感磁ワイヤーを通過する延在成分は低減される。この結果、上記のような磁場変向体が配設されていない場合と比較して、その感磁ワイヤーひいてはMI素子の測定レンジが拡大することになる。そして左側変向部または右側変向部の配置や大きさを調整することにより、感磁ワイヤーに導入される延在成分と直交成分のバランス調整も可能となり、外部磁場の各成分を適当な感度を確保しつつ、広いレンジで測定可能となる。
磁場変向体は、さらに、左側変向部と右側変向部を感磁ワイヤーに対して遠い側で架橋する架橋部を有すると好ましい。この場合、左側変向部と架橋部と右側変向部がヨーク(継鉄)となり、左側変向部または右側変向部の一方から入った磁場成分が架橋部を介して左側変向部または右側変向部の他方から抜ける磁気回路が形成される。また架橋部は、前述した集磁部としても機能し、より多くの直交成分が集磁されて感磁ワイヤーへ導かれるようになり磁気検出装置の高感度化にも寄与し得る。
第3タイプとして、感磁ワイヤーが平行に配設された第1ワイヤーと第2ワイヤーとからなり、検出コイルが第1ワイヤーを周回する第1コイルと第2ワイヤーを周回する第2コイルとからなり、磁場変向体が第1ワイヤーの一端部側寄りに配設された第1変向体と第2ワイヤーの他端部側寄りに配設された第2変向体とを有する場合が考えられる。
この場合、上述した第2タイプと同様に、外部磁場の延在成分の一部は、第1変向体と第2変向体により変向され、感磁ワイヤーを迂回するようになる。このため、感磁ワイヤーを通過する延在成分は低減され、磁場変向体を配設しない場合と比較して、MI素子の測定レンジが拡大し得る。
ところで、第2タイプの場合は、感磁ワイヤーの両端部のみならず、その中間にもそれぞれ磁極が形成される(例えば両端部がS極で中央がN極となること)。これに対して、第3タイプの場合は、感磁ワイヤーのそれぞれの一端部に磁極(N極とS極)が形成されるのみである。このため第3タイプの場合は、第2タイプの場合よりも、感磁ワイヤーにできる磁極間距離を長くすることができ、その分、感磁ワイヤー中の反磁界の影響を抑制できる。従って、感磁ワイヤーの長さが同じなら、第2タイプの場合よりも第3タイプの場合の方が、磁場成分をより高感度に検出することが可能となる。
また第3タイプの場合、感磁ワイヤーと検出コイルがそれぞれ1対づつ以上設けられるため、同方向の磁場成分に対して約2倍の検出出力が得られ、磁気検出装置の高感度化を図り易い。そして第3タイプの場合でも、第1変向体と第2変向体を、第1ワイヤーおよび第2ワイヤーに対して遠い側で架橋する架橋体を有すると好ましい。この架橋体も、第2タイプの架橋部と同様に、ヨーク(継鉄)として機能すると共に集磁部としても機能し得る。
(2)本発明の磁気検出装置は、外部磁場の三次元成分(例えば、X成分、Y成分、Z成分)を検出する場合なら、基板上に第1軸方向(一軸方向、例えばX軸方向)とは異なる第2軸方向(例えばY軸方向)の磁場成分を検出するMI素子を少なくとも一つ備えるとよい。すなわち、本発明の磁気検出装置は、基板に配設され、第1軸方向とは異なる第2軸方向へ延在して第2軸方向の磁場成分に感応する第2感磁ワイヤーと第2感磁ワイヤーを周回する第2検出コイルとからなる第2MI素子をさらに備えると好適である。
第2MI素子は、必ずしも他軸方向(第3軸方向、例えばZ軸方向)の磁場成分を検出するものでなくてもよい。但し、第1MI素子と共に第2MI素子も独立して他軸方向の磁場成分を検出するものであると、両検出結果を利用することにより、他軸方向の磁場成分をより精確に検出することが可能となる。また本発明の磁気検出装置は、第1軸方向の磁場成分を検出する第1MI素子および/または第2軸方向の磁場成分を検出する第2MI素子が、それぞれ、基板上に複数配設されていてもよい。1つでは十分な感度が得にくい場合でも、複数配設することにより、より高出力を得て、感度を高めることができる。
ちなみにMI素子または磁場変向体は、例えば、基板の片面側のみに配設されても、両面側に配設されても、さらには基板中に配設されてもよい。磁場変向体は、一つまたは一対のMI素子に対して、単数配置されても複数配置されてもよい。磁場変向体が複数配置される場合、各磁場変向体は形態や大きさが同じでも異なっていてもよい。一つまたは一対のMI素子に対して磁場変向体を複数配置する場合、それらは対称的に配置されると好ましい。逆に、複数または複数対のMI素子が、一つまたは複数の磁場変向体を共用してもよい。
(3)本発明の磁気検出装置は、MI素子を備えたMIセンサでもよいし、さらに、そのMIセンサを備えた各種の情報端末や計測装置等でもよい。また本発明の磁気検出装置は、感磁ワイヤーと検出コイルを備えるMI素子の他に、その感磁ワイヤーに高周波電圧(電流)を供給するパルス発振回路、検出コイル(特に各コイル部)から得られた検出電圧をサンプリングして出力する信号処理回路、それらの出力に基づいて演算を行い、各方向の磁場成分を算出する演算回路等を含むと好ましい。特に本発明の磁気検出装置がMIセンサである場合、それら各回路は、集積回路(駆動回路)としてMI素子が実装される基板内に形成されていると、MIセンサの薄型化や小型化を図れて好適である。なお、MI素子の基板への実装は、ワイヤーボンディングの他、フリップチップ、特にウエハーレベルCSP(Wafer Level Chip Size Package)に依ると、MIセンサのさらなる薄型化、小型化を図れて好ましい。
《磁気検出装置の製造方法》
本発明の磁気検出装置は、例えば、磁場変向体を内蔵した内蔵ベース基板上に、磁場変向体の配置に対応させてMI素子を実装する工程を経て得られる。内蔵ベース基板は、フォトリソグラフィ等を用いて、磁場変向体を形成する工程と、磁場変向体を埋設する樹脂層を形成する工程とを経て得られる。磁場変向体の形成は、非磁性材(樹脂または銅等)からなる芯部を形成する工程と、その芯部の外表面に軟磁性材からなる殻部を形成する工程(例えば、メッキ工程)とを経て得られる。
本発明の磁気検出装置は、例えば、磁場変向体を内蔵した内蔵ベース基板上に、磁場変向体の配置に対応させてMI素子を実装する工程を経て得られる。内蔵ベース基板は、フォトリソグラフィ等を用いて、磁場変向体を形成する工程と、磁場変向体を埋設する樹脂層を形成する工程とを経て得られる。磁場変向体の形成は、非磁性材(樹脂または銅等)からなる芯部を形成する工程と、その芯部の外表面に軟磁性材からなる殻部を形成する工程(例えば、メッキ工程)とを経て得られる。
なお、通常は、多数(複数)の磁場変向体を内蔵した内蔵ベース基板上に多数のMI素子を実装した実装基板を、分割(ダイシング)することにより、小型の磁気検出装置(MIセンサ)が効率的に生産される。
《第1実施例》
[装置概要]
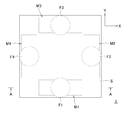
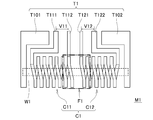
本発明の磁気検出装置に係る第1実施例であるMIセンサモジュール1(単に「MIセンサ1」という。)の概略(平面図)を図1に示した。また、その図1中に示したA-A線における部分断面図と、それに作用するZ軸方向(他軸方向、第3軸方向)の磁束線を図2Aに示した。さらに、図2Aに示した部分の詳細な平面図を図2Bに示した。
[装置概要]
本発明の磁気検出装置に係る第1実施例であるMIセンサモジュール1(単に「MIセンサ1」という。)の概略(平面図)を図1に示した。また、その図1中に示したA-A線における部分断面図と、それに作用するZ軸方向(他軸方向、第3軸方向)の磁束線を図2Aに示した。さらに、図2Aに示した部分の詳細な平面図を図2Bに示した。
MIセンサ1は、地磁気等の外部磁場を検出する4つのMI素子M1~M4と、磁場変向体F1~F4と、MI素子M1~M4が搭載されると共に磁場変向体F1~F4を内蔵する回路基板S(本発明でいう「基板」に相当する。)とを有する。
回路基板S中には、各MI素子の駆動に必要なパルス発信回路(駆動回路)、信号処理回路、演算回路等を含む集積回路(ASIC:application specific integrated circuit)も形成されている。なお、詳細は省略しているが、各MI素子と回路基板S内の集積回路とは、バンプを介して電気的に接続される。これによりワイヤーボンディングを省略したウエハーレベルCSPが実現される。また、特に断らない限り、各回路等はフォトリソグラフィにより形成される。
MI素子M1~M4は、回路基板S上にフリップチップにより正方形状に実装されている。そしてX軸方向に並行に実装されたMI素子M1、M3によりX軸方向(一軸方向または第1軸方向)の磁場成分(単に「X成分」という。)が検出され、Y軸方向(第2軸方向)に並行に実装されたMI素子M2、M4によりY軸方向の磁場成分(単に「Y成分」という。)が検出され得る。そして、各MI素子の各中央線上に配設された磁場変向体F1~F4により、Z軸方向の磁場成分(単に「Z成分」という。)もMI素子M1~M4によって検出可能となる。
なお、MI素子M1~M4と磁場変向体F1~F4はそれぞれ同形態であるため、以下では、適宜、MI素子M1と磁場変向体F1を代表的に取り上げて説明し、他のMI素子M2~M4と磁場変向体F2~F4に関する説明は省略する。
MI素子M1は、図2Bに示すように感磁ワイヤーW1と、その周囲に巻回された検出コイルC1と、感磁ワイヤーW1および検出コイルC1に接続される端子群T1とからなる。感磁ワイヤーW1は、Co-Fe-Si-B系合金製の零磁歪アモルファスワイヤーからなる。検出コイルC1は、左側コイル部C11と右側コイル部C12とからなる。左側コイル部C11と右側コイル部C12は、巻数、巻径、巻回方向、ピッチ等、出力の大きさに影響する仕様が全て同じで、磁場変向体F1の中心軸が通過する中心位置(点)に関して左右対称に形成されている。各コイル部C11、C12と端子群T1は、フォトリソグラフィを用いて回路基板S上に形成される。端子群T1は、感磁ワイヤーW1にパルス信号を供給するための端子T101、T102と、左側コイル部C11で生じた起電力(V11)を出力する端子T111、T112と、右側コイル部C12で生じた起電力(V12)を出力する端子T121、T122とからなる。
磁場変向体F1は、絶縁樹脂からなる円柱状または円錐台状の芯部F10と、芯部F10の側周面F101および頂面F102を被覆してなる薄膜状の殻部F11と、芯部F10の底面側(頂面F102の反対面側)で拡張した拡大部F13とからなる。殻部F11と拡大部F13は連なっており、両者は高透磁率(μ=180000)のパーマロイ合金(78質量%Ni-Fe)からなる。磁場変向体F1により、Z成分の磁束線は図2Aに示すように変向される。具体的にいうと、Z成分は、拡大部F13で集磁され殻部F11の周側部分を通過して、殻部F11の頂面部分からMI素子M1に向けて放射状に(左右方向へ均等に)拡散していく。このようにZ成分は、磁場変向体F1により感磁ワイヤーW1の延在方向(X軸方向)に変向される結果、MI素子M1により検出され得る。
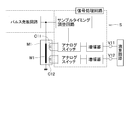
回路基板Sに形成される集積回路(ASIC)は、図3に示すように、感磁ワイヤーW1にパルス信号を供給するパルス発信回路(駆動回路)と、左側コイル部C11からの出力(電圧)V11と右側コイル部C12からの出力(電圧)V12を得る信号処理回路と、演算回路(切替回路を含む。)とからなる。
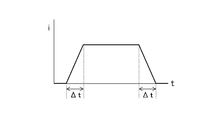
パルス発信回路と信号処理回路は次のように作動する。先ず、パルス発振回路により発生した高周波(例えば200MHz相当)のパルス電流が感磁ワイヤーW1へ供給される。このパルス電流により感磁ワイヤーW1のワイヤー円周方向に生じた磁場と外部磁場とが作用して、その軸方向に作用する磁場成分に対応した電圧が左側コイル部C11と右側コイル部C12に発生する。なお、ここでいう周波数は、図4Aに示すパルス電流波形パルスの「立ち上がり」若しくは「立ち下り」の時間Δtを求め、そのΔtが図4Bに示すように4分の1周期に相当するとして求めたものである。
次に、信号処理回路中のサンプルタイミング調整回路により、上記のパルス電流が立ち上がった後、所定のタイミングで、アナログスイッチを短時間スイッチをオン-オフする。これによりアナログスイッチは、左側コイル部C11と右側コイル部C12にそれぞれ発生した各電圧をサンプリングする。サンプリング電圧は、それぞれ増幅器により増幅されて出力V11、V12が得られる。なお、パルス電流が立ち上がる時ではなく遮断されるとき(パルス電流が立ち下るとき)に処理してV11、V12を得ることもできる。
演算回路は、出力V11と出力V12の和と差を交互に演算し、出力V11と出力V12の和に基づき外部磁場のX成分(一軸方向の磁場成分)を指標する出力を行い、出力V11と出力V12の差に基づき外部磁場のZ成分(他軸方向の磁場成分)を指標する出力を行う。なお、和と差でX成分とZ成分を指標する出力ができる理由について以下に説明する。
[磁場検出]
磁場変向体F1は、MI素子M1の対称な左側コイル部C11と右側コイル部C12の中央に配置されている。磁場変向体F1が各コイル部の出力へ及ぼす影響も対称的となる。例えば、磁場変向体F1により変向された外部磁場のZ成分である変向磁場成分(測定磁場/磁気ベクトルH)を観ると、左側コイル部C11と右側コイル部C12は、前述した通り、出力の大きさに影響する仕様が全て同一となっている。このため、左側コイル部C11の出力V11と右側コイル部C12の出力V12との出力差(V11-V12)は、MI素子M1の周囲に生じている元の外部磁場のX軸方向の成分の影響が相殺されて、左側コイル部C11と右側コイル部C12に逆向きに作用する変向磁場成分のさらなるX成分(Hx)の影響だけが反映されたものとなる。なお、変向磁場成分のZ成分(Hz)は感磁ワイヤーW1が感応しないため、当然、上記の出力差に影響はしない。この出力差に適当な係数を乗じて演算すれば、その出力差から元の外部磁場のZ成分を求めることが可能となる。
磁場変向体F1は、MI素子M1の対称な左側コイル部C11と右側コイル部C12の中央に配置されている。磁場変向体F1が各コイル部の出力へ及ぼす影響も対称的となる。例えば、磁場変向体F1により変向された外部磁場のZ成分である変向磁場成分(測定磁場/磁気ベクトルH)を観ると、左側コイル部C11と右側コイル部C12は、前述した通り、出力の大きさに影響する仕様が全て同一となっている。このため、左側コイル部C11の出力V11と右側コイル部C12の出力V12との出力差(V11-V12)は、MI素子M1の周囲に生じている元の外部磁場のX軸方向の成分の影響が相殺されて、左側コイル部C11と右側コイル部C12に逆向きに作用する変向磁場成分のさらなるX成分(Hx)の影響だけが反映されたものとなる。なお、変向磁場成分のZ成分(Hz)は感磁ワイヤーW1が感応しないため、当然、上記の出力差に影響はしない。この出力差に適当な係数を乗じて演算すれば、その出力差から元の外部磁場のZ成分を求めることが可能となる。
また、出力V11と出力V12の出力和(V11+V12)は、変向磁場成分のX成分(Hx)の影響が相殺され、上述したように変向磁場成分のZ成分(Hz)の影響もなく、元の外部磁場のX成分が磁場変向体F1により変向されて生じた磁場成分のさらなるX成分(X軸方向への投影成分)の影響だけが反映されたものとなる。この出力和に適当な係数を乗じて演算すれば、その出力和から元の外部磁場のX成分を求めることが可能となる。このような事情はMI素子M3についても同様である。また、同様の考え方で、MI素子M2とMI素子M4によりY成分とZ成分を検出することができる。
なお、外部磁場の各軸方向の成分は、一つのMI素子の出力のみに依ることなく、複数のMI素子の出力の平均値(例えば相加平均)に基づいて算出されると好ましい。さらに、磁場変向体の形状、MI素子の配置や特性等を考慮して、出力値に適切な補正係数または補正項が加味され得ることは当然である。このような演算処理は、上述した演算回路でなされてもよいし、MIセンサ1を搭載する情報端末等のプログラムでなされてもよい。演算処理に関する基本的な考え方は、WO2010/110456号公報等にも詳述されている。
[製造方法]
磁場変向体F1を内蔵した回路基板Sは、例えば、図5に示す工程を経て製造される。具体的にいうと、先ず、シリコンウェハーに上述したパルス発振回路、信号処理回路、演算回路からなる集積回路を多数形成したベース基板S0を用意する(工程P1)。
磁場変向体F1を内蔵した回路基板Sは、例えば、図5に示す工程を経て製造される。具体的にいうと、先ず、シリコンウェハーに上述したパルス発振回路、信号処理回路、演算回路からなる集積回路を多数形成したベース基板S0を用意する(工程P1)。
ベース基板S0上に芯部F10となる絶縁樹脂製のポストを形成する(工程P2)。この芯部F10上に、拡大部F13および殻部F11となるパーマロイ合金のメッキ層を形成する(工程P3)。これらメッキ層の形成工程(メッキ工程)もフォトリソグラフィによりなされる。このメッキ工程後に熱処理(焼鈍)して、形成された殻部F11および拡大部F13に導入された僅かな内部応力(または内部歪み)を除去してもよい。
ベース基板S0上に形成された磁場変向体F1を囲繞する絶縁樹脂層R1を樹脂モールドにより形成する(工程P4)。絶縁樹脂層R1の上端面を研磨して平坦にする(工程P5)。この研磨後にパーマロイ合金のメッキをさらに行い、殻部F11の頂面側(上端面側)の膜厚を所望値に調整しても良い。こうして磁場変向体F1を内蔵した内蔵ベース基板SB1が得られる。
内蔵ベース基板SB1上に、MI素子M1をフリップチップ等により実装する(工程P6/実装工程)。この後、内蔵ベース基板SB1の他面側を研磨(バックグラインド)等する。こうして合体ベース基板SU1が得られる。この合体ベース基板SU1をダイシングすることにより(分割工程)、多数のMIセンサ1が得られる。なお、各MIセンサは、WO2014/054371号公報等に詳述されている方法で、内蔵ベース基板SB1等の表面に形成されてもよい。
《第2実施例》
第2実施例であるMIセンサ2の断面図を図6Aおよび図6Bに示した。またMIセンサ2の要部となる感磁ワイヤーW1と検出コイルC1と磁場変向体F5の配置関係を模式的に示す斜視図を図6Cに示した。適宜、図6A~図6Cをまとめて図6という。なお、第1実施例の場合と同様な部材または部分には同符号を付して、それらの部材に関する説明は省略した。
第2実施例であるMIセンサ2の断面図を図6Aおよび図6Bに示した。またMIセンサ2の要部となる感磁ワイヤーW1と検出コイルC1と磁場変向体F5の配置関係を模式的に示す斜視図を図6Cに示した。適宜、図6A~図6Cをまとめて図6という。なお、第1実施例の場合と同様な部材または部分には同符号を付して、それらの部材に関する説明は省略した。
磁場変向体F5は、板状の架橋部F53(拡大部または集磁部)と、架橋部F53の左端部から直立した角柱状の左側変向部F51と、架橋部F53の右端部から直立した角柱状の右側変向部F52とを有する。左側変向部F51は、芯部F510と、芯部F510の頂面および側周面を被覆する薄膜状の殻部F511とからなる。殻部F511と架橋部F53は芯部F510の底面側で連なっている。右側変向部F52は、芯部F520と、芯部F520の頂面および側周面を被覆する薄膜状の殻部F521とからなる。殻部F521と架橋部F53も芯部F520の底面側で連なっている。殻部F511、殻部F521および架橋部F53は前述した軟磁性材(パーマロイ合金)からなる。芯部F510および芯部F520は前述した絶縁樹脂からなる。
磁場変向体F5により、MI素子M1に作用する外部磁場は、図6Aおよび図6Bに示す磁束線のように変向される。具体的にいうと、感磁ワイヤーW1の延在方向(X方向)の外部磁場成分(延在成分)は、図6Aに示すように、その一部のみが感磁ワイヤーW1へ導入され、その大部分は右側変向部F52、架橋部F53および左側変向部F51を経由して感磁ワイヤーW1を迂回する。
一方、感磁ワイヤーW1の直交方向(Z方向)の外部磁場成分(直交成分)は、図6Bに示すように、架橋部F53により集磁された後、左側変向部F51と右側変向部F52へ分岐して、左側変向部F51と右側変向部F52の上端面側(架橋部F53の反対面側)から感磁ワイヤーW1へ導入される。そして感磁ワイヤーW1の延在方向へ変向した直交成分の一部が、MI素子M1によって検出される。
左側変向部F51と右側変向部F52は、感磁ワイヤーW1の中央に関して対称的に配置されていると共に、同じ大きさで対称形状をしている。このため左側変向部F51と右側変向部F52を経由して感磁ワイヤーW1へ導入される直交成分の各変向成分も、それぞれ対称的と(逆向きで大きさが等しく)なる。
従って本実施例でも、第1実施例の場合と同様に、MI素子M1から得られる出力V11と出力V12の和に基づいて外部磁場のX成分の検出が可能であり、また出力V11と出力V12の差に基づいて外部磁場のZ成分の検出が可能である。但し、本実施例の場合、元の外部磁場の延在成分と直交成分のそれぞれ一部が、磁場変向体F5により変向されて感磁ワイヤーW1へ導かれる。このため、左側コイル部C11と右側コイル部C12により得られるそれぞれの出力(V11+V12とV11-V12)のレベル差は小さい。この結果、本実施例のMIセンサ2によれば、外部磁場の延在成分と直交成分の両方を適当な感度で、かつ広レンジで測定できる。
《第3実施例》
第3実施例であるMIセンサ3の断面図を図7Aに示した。また、MIセンサ3の要部となる感磁ワイヤーW61、W62と検出コイルC61、C62と磁場変向体F6の配置関係を模式的に示す斜視図を図7Bに示した。図7Aおよび図7Bをまとめて、適宜、図7という。
第3実施例であるMIセンサ3の断面図を図7Aに示した。また、MIセンサ3の要部となる感磁ワイヤーW61、W62と検出コイルC61、C62と磁場変向体F6の配置関係を模式的に示す斜視図を図7Bに示した。図7Aおよび図7Bをまとめて、適宜、図7という。
MIセンサ3は、MIセンサ2に対して、磁場変向体F5を磁場変向体F6に、MI素子M1をMI素子M61、M62に、それぞれ変更したものである。MI素子M61は感磁ワイヤーW61とその周囲に巻回された検出コイルC61とを有し、MI素子M62は感磁ワイヤーW62とその周囲に巻回された検出コイルC62とを有する。検出コイルC61と検出コイルC62は、MI素子M1の左側コイル部C11と右側コイル部C12にそれぞれ対応するが、それらは途中で分割はされておらず、感磁ワイヤーW61と感磁ワイヤーW62の周囲にそれぞれ独立して形成されている。
磁場変向体F6は、板状の架橋体F63(拡大部または集磁部)と、架橋体F63の左端角部から直立した角柱状の第1変向体F61と、架橋体F63の右端角部から直立した角柱状の第2変向体F62とを有する。第1変向部F61は、芯部F610(図略)と、芯部F610の頂面および側周面を被覆する薄膜状の殻部F611(図略)とからなる。殻部F611と架橋部F63は芯部F610の底面側で連なっている。第2変向部F62は、芯部F620と、芯部F620の頂面および側周面を被覆する薄膜状の殻部F621とからなる。殻部F621と架橋部F63は芯部F620の底面側で連なっている。殻部F611、殻部F621および架橋部F63は前述した軟磁性材(パーマロイ合金)からなる。芯部F610および芯部F620は前述した絶縁樹脂からなる。
磁場変向体F6により、感磁ワイヤーW61、W62の周囲の外部磁場分布(磁束線)が変向されるが、変向形態は磁場変向体F5の場合と多少異なる。具体的にいうと、先ず、感磁ワイヤーW61、W62の延在方向(X方向)の外部磁場成分(延在成分)は変向されて、その一部が感磁ワイヤーW61、W62へ導入される。次に、直交方向(Z方向)の外部磁場成分(直交成分)は、架橋体F63により集磁され、第1変向体F61と第2変向体F62に分岐(収束)して、それらの上端面側から感磁ワイヤーW61、W62の中央寄りへ変向する。その変向磁場成分(H)のさらに一部(Hx)が感磁ワイヤーW61、W62へ導入される。
ここで本実施例の場合、第1変向体F61と第2変向体F62は、感磁ワイヤーW61、W62の各一端側にのみそれぞれ配設されている。このため、例えば、感磁ワイヤーW62には、図7Aに示すように、一端側にS極、他端側にN極が形成され、その途中に磁極が形成されることがなく、感磁ワイヤーW62上に形成される磁極間距離が長くなる。これに対して、MIセンサ2のように感磁ワイヤーW1の両端に左側変向部F51と右側変向部F52がある場合、例えば、感磁ワイヤーW1の両端にS極、それらの中間にN極が形成されて、磁極間距離が短くなる。
従ってMIセンサ3は、感磁ワイヤーW61、W62に作用する反磁界の影響が少なくなり、MIセンサ2よりも高感度となり易い。加えてMIセンサ3は、並設された一対の感磁ワイヤーと検出コイルが1セットとなっているため、外部磁場の測定をより高感度で行える。
なお、MI素子M61と第1変向体F61およびMI素子M62と第2変向体F62は、架橋体F63の中心軸まわりに対称的な配置および形態となっている。このためMIセンサ3でも、MIセンサ2の場合と同様な演算方法により、外部磁場の延在成分および直交成分の検出が可能となる。
1 MIセンサ(磁気検出装置)
M1 MI素子
W1 感磁ワイヤー
C1 検出コイル
C11 左側コイル部
C12 右側コイル部
F1 磁場変向体(磁場変向体)
F10 芯部
F11 殻部
S 回路基板(基板)
M1 MI素子
W1 感磁ワイヤー
C1 検出コイル
C11 左側コイル部
C12 右側コイル部
F1 磁場変向体(磁場変向体)
F10 芯部
F11 殻部
S 回路基板(基板)
Claims (6)
- 基板と、
該基板に配設され、延在方向の外部磁場成分に感応する感磁ワイヤーと該感磁ワイヤーを周回する検出コイルとを有するマグネトインピーダンス素子(「MI素子」という。)と、
該基板上または該基板内に少なくとも一部が配設されており、該感磁ワイヤーの周囲の外部磁場を変向する磁場変向体と、
を備える磁気検出装置であって、
前記磁場変向体は、
非磁性材からなる芯部と、
該芯部の少なくとも一部の外側を覆う軟磁性材からなる殻部と、
を有することを特徴とする磁気検出装置。 - 前記芯部は、前記感磁ワイヤーに対して直交する方向に延在する柱状または円錐状であり、
前記殻部の少なくとも一部は、該芯部の該感磁ワイヤー側の端面である頂面に形成されている請求項1に記載の磁気検出装置。 - 前記検出コイルは、前記感磁ワイヤーに沿って並存する左側コイル部と右側コイル部とからなり、
前記磁場変向体は、該左側コイル部と該右側コイル部の中間上に配設されている請求項1または2に記載の磁気検出装置。 - 前記検出コイルは、前記感磁ワイヤーに沿って並存する左側コイル部と右側コイル部とからなり、
前記磁場変向体は、該左側コイル部側寄りに配設される左側変向部と該右側コイル部側寄りに配設される右側変向部とを有する請求項1または2に記載の磁気検出装置。 - 前記感磁ワイヤーは、平行に配設された第1ワイヤーと第2ワイヤーとからなり、
前記検出コイルは、該第1ワイヤーを周回する第1コイルと該第2ワイヤーを周回する第2コイルとからなり、
前記磁場変向体は、該第1ワイヤーの一端部側寄りに配設された第1変向体と該第2ワイヤーの他端部側寄りに配設された第2変向体とを有する請求項1または2に記載の磁気検出装置。 - 前記磁場変向体の殻部は、単数または複数の前記MI素子に関して対称的に形成されている請求項1~5のいずれかに記載の磁気検出装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP16832630.4A EP3333582B1 (en) | 2015-08-05 | 2016-06-21 | Magnetic detector |
| CN201680045285.8A CN107850647B (zh) | 2015-08-05 | 2016-06-21 | 磁检测装置 |
| US15/745,910 US10620276B2 (en) | 2015-08-05 | 2016-06-21 | Magnetic detector |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015155323A JP6036938B1 (ja) | 2015-08-05 | 2015-08-05 | 磁気検出装置 |
| JP2015-155323 | 2015-08-05 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017022351A1 true WO2017022351A1 (ja) | 2017-02-09 |
Family
ID=57419943
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/068383 WO2017022351A1 (ja) | 2015-08-05 | 2016-06-21 | 磁気検出装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10620276B2 (ja) |
| EP (1) | EP3333582B1 (ja) |
| JP (1) | JP6036938B1 (ja) |
| CN (1) | CN107850647B (ja) |
| WO (1) | WO2017022351A1 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017219457A (ja) * | 2016-06-09 | 2017-12-14 | 愛知製鋼株式会社 | マグネトインピーダンスセンサ |
| DE102016115415B4 (de) * | 2016-08-19 | 2018-04-12 | Precitec Gmbh & Co. Kg | Isolationsteil zur isolierten Halterung einer elektrisch leitenden Düse und Laserbearbeitungskopf mit einem Sensor zur Erkennung eines derartigen Isolationsteils |
| JP6240994B1 (ja) | 2016-12-15 | 2017-12-06 | 朝日インテック株式会社 | 3次元磁界検出素子および3次元磁界検出装置 |
| WO2021144876A1 (ja) * | 2020-01-15 | 2021-07-22 | 朝日インテック株式会社 | 測定装置、検出装置、および測定方法 |
| KR102649010B1 (ko) * | 2020-03-05 | 2024-03-20 | 한국전자통신연구원 | Rf 미소 자계 검출 센서 및 그 제조 방법 |
| JP2023002228A (ja) * | 2021-06-22 | 2023-01-10 | 昭和電工株式会社 | 情報処理装置および磁気センサシステム |
| EP4394417A1 (en) * | 2022-12-31 | 2024-07-03 | Melexis Technologies SA | Sensor device with circuit and integrated component for magneto-impedance measurement, and method of producing same |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003318466A (ja) * | 2002-04-26 | 2003-11-07 | Tohoku Ricoh Co Ltd | 磁気センサ、この磁気センサを用いた方位検知システム及び携帯通信端末 |
| WO2010110456A1 (ja) * | 2009-03-26 | 2010-09-30 | 愛知製鋼株式会社 | 磁気検出装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20040098666A (ko) * | 2002-03-27 | 2004-11-20 | 마쯔시다덴기산교 가부시키가이샤 | 자기검출소자 및 자기검출기, 및 그 제조방법 |
| KR100743384B1 (ko) | 2003-07-18 | 2007-07-30 | 아이치 세이코우 가부시키가이샤 | 3차원 자기 방위센서 및 마그네토-임피던스 센서 소자 |
| JP4984408B2 (ja) * | 2005-03-17 | 2012-07-25 | ヤマハ株式会社 | 磁気センサおよびその製法 |
| JP2008197089A (ja) * | 2007-01-17 | 2008-08-28 | Fujikura Ltd | 磁気センサ素子及びその製造方法 |
| JP2008249406A (ja) * | 2007-03-29 | 2008-10-16 | Fujikura Ltd | 磁気インピーダンス効果素子及びその製造方法 |
| CN103454601B (zh) | 2008-03-28 | 2016-05-18 | 爱知制钢株式会社 | 磁敏线、磁阻抗元件及磁阻抗传感器 |
| WO2010097932A1 (ja) * | 2009-02-27 | 2010-09-02 | 愛知製鋼株式会社 | マグネトインピーダンスセンサ素子及びその製造方法 |
| JP4655247B2 (ja) * | 2009-04-23 | 2011-03-23 | 愛知製鋼株式会社 | 超高感度マグネトインピーダンスセンサ |
| US20150262748A1 (en) | 2012-10-04 | 2015-09-17 | Aichi Steel Corporation | Magneto-impedance element and method for producing the same |
| US9341684B2 (en) * | 2013-03-13 | 2016-05-17 | Plures Technologies, Inc. | Magnetic field sensing apparatus and methods |
-
2015
- 2015-08-05 JP JP2015155323A patent/JP6036938B1/ja active Active
-
2016
- 2016-06-21 US US15/745,910 patent/US10620276B2/en active Active
- 2016-06-21 CN CN201680045285.8A patent/CN107850647B/zh active Active
- 2016-06-21 WO PCT/JP2016/068383 patent/WO2017022351A1/ja active Application Filing
- 2016-06-21 EP EP16832630.4A patent/EP3333582B1/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003318466A (ja) * | 2002-04-26 | 2003-11-07 | Tohoku Ricoh Co Ltd | 磁気センサ、この磁気センサを用いた方位検知システム及び携帯通信端末 |
| WO2010110456A1 (ja) * | 2009-03-26 | 2010-09-30 | 愛知製鋼株式会社 | 磁気検出装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3333582A4 * |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3333582A1 (en) | 2018-06-13 |
| EP3333582B1 (en) | 2019-06-05 |
| CN107850647A (zh) | 2018-03-27 |
| JP2017032499A (ja) | 2017-02-09 |
| EP3333582A4 (en) | 2018-08-29 |
| US20180210040A1 (en) | 2018-07-26 |
| CN107850647B (zh) | 2020-03-03 |
| JP6036938B1 (ja) | 2016-11-30 |
| US10620276B2 (en) | 2020-04-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6036938B1 (ja) | 磁気検出装置 | |
| JP6222351B2 (ja) | 磁気検出装置およびその製造方法 | |
| KR101235524B1 (ko) | 자기 검출 장치 | |
| US8952687B2 (en) | Current sensor | |
| KR101267246B1 (ko) | 플럭스 게이트 센서 및 이것을 사용한 전자 방위계 | |
| US7759933B2 (en) | Magnetic amplification device comprising a magnetic sensor with longitudinal sensitivity | |
| US11009566B2 (en) | Three-dimensional magnetic field detection element and three-dimensional magnetic field detection device | |
| WO2011155527A1 (ja) | フラックスゲートセンサおよびそれを利用した電子方位計ならびに電流計 | |
| JP6609947B2 (ja) | 磁気検出装置 | |
| JP2012052980A (ja) | 電流センサ | |
| JP2020160081A (ja) | 3次元磁界検出装置 | |
| US8270127B2 (en) | Magnetic coupling-type isolator | |
| US20240219487A1 (en) | Sensor device with circuit and integrated component for magneto-impedance measurement, and method of producing same | |
| JP6222897B2 (ja) | 多軸磁気センサ、および、その製造方法 | |
| WO2015046206A1 (ja) | 電流センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16832630 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15745910 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2016832630 Country of ref document: EP |