WO2017018205A1 - エネルギー処置システム、エネルギー制御装置及びエネルギー処置具 - Google Patents
エネルギー処置システム、エネルギー制御装置及びエネルギー処置具 Download PDFInfo
- Publication number
- WO2017018205A1 WO2017018205A1 PCT/JP2016/070582 JP2016070582W WO2017018205A1 WO 2017018205 A1 WO2017018205 A1 WO 2017018205A1 JP 2016070582 W JP2016070582 W JP 2016070582W WO 2017018205 A1 WO2017018205 A1 WO 2017018205A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- energy
- output
- treatment target
- treatment
- electrical energy
- Prior art date
Links
Images














Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/08—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by means of electrically-heated probes
- A61B18/082—Probes or electrodes therefor
- A61B18/085—Forceps, scissors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/08—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by means of electrically-heated probes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/08—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by means of electrically-heated probes
- A61B18/10—Power sources therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1442—Probes having pivoting end effectors, e.g. forceps
- A61B18/1445—Probes having pivoting end effectors, e.g. forceps at the distal end of a shaft, e.g. forceps or scissors at the end of a rigid rod
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1442—Probes having pivoting end effectors, e.g. forceps
- A61B18/1445—Probes having pivoting end effectors, e.g. forceps at the distal end of a shaft, e.g. forceps or scissors at the end of a rigid rod
- A61B18/1447—Probes having pivoting end effectors, e.g. forceps at the distal end of a shaft, e.g. forceps or scissors at the end of a rigid rod wherein sliding surfaces cause opening/closing of the end effectors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/053—Measuring electrical impedance or conductance of a portion of the body
- A61B5/0537—Measuring body composition by impedance, e.g. tissue hydration or fat content
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/053—Measuring electrical impedance or conductance of a portion of the body
- A61B5/0538—Measuring electrical impedance or conductance of a portion of the body invasively, e.g. using a catheter
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/48—Other medical applications
- A61B5/4836—Diagnosis combined with treatment in closed-loop systems or methods
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/48—Other medical applications
- A61B5/4869—Determining body composition
- A61B5/4875—Hydration status, fluid retention of the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6847—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive mounted on an invasive device
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N27/00—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means
- G01N27/02—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating impedance
- G01N27/04—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating impedance by investigating resistance
- G01N27/048—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating impedance by investigating resistance for determining moisture content of the material
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00022—Sensing or detecting at the treatment site
- A61B2017/00026—Conductivity or impedance, e.g. of tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00022—Sensing or detecting at the treatment site
- A61B2017/00026—Conductivity or impedance, e.g. of tissue
- A61B2017/0003—Conductivity or impedance, e.g. of tissue of parts of the instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00022—Sensing or detecting at the treatment site
- A61B2017/00084—Temperature
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00642—Sensing and controlling the application of energy with feedback, i.e. closed loop control
- A61B2018/00654—Sensing and controlling the application of energy with feedback, i.e. closed loop control with individual control of each of a plurality of energy emitting elements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00696—Controlled or regulated parameters
- A61B2018/00702—Power or energy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00696—Controlled or regulated parameters
- A61B2018/00714—Temperature
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00875—Resistance or impedance
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00994—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body combining two or more different kinds of non-mechanical energy or combining one or more non-mechanical energies with ultrasound
Abstract
エネルギー出力部は、第1の電気エネルギーが出力することにより、処置対象を通して電極の間で高周波電流が流し、第2の電気エネルギーを出力することにより、エンドエフェクタにおいて熱を発生させる。制御部は、前記第2の電気エネルギーの出力開始から前記熱が継続して処置対象を変性させている間の少なくとも一部の時間において、前記第1の電気エネルギーを前記第2の電気エネルギーと同時に出力させる。前記制御部は、前記処置対象が所定の状態になったと判断したことに基づいて、前記第1の電気エネルギーの電力を増加させる。
Description
本発明は、エネルギー制御装置からエネルギー処置具にエネルギーが供給され、供給されたエネルギーを用いてエネルギー処置具に設けられるエンドエフェクタが処置対象を処置するエネルギー処置システムに関する。また、そのエネルギー処置システムに設けられるエネルギー制御装置及びエネルギー処置具に関する。
米国特許出願公開第2009/248002号明細書には、2つ(一対)のクランプ部の間で処置対象を把持するエンドエフェクタが設けられたエネルギー処置具が開示されている。このエネルギー処置具では、クランプ部のそれぞれに電極が設けられ、エネルギー制御装置から電極に高周波電気エネルギー(第1の電気エネルギー)が供給されることにより、把持される処置対象を通して電極の間で高周波電流が流れ、処置対象が変性される。また、エンドエフェクタでは、クランプ部の一方に発熱体が設けられ、発熱体に熱発生電気エネルギー(第2の電気エネルギー)が供給されることにより、発熱体で熱が発生する。高周波電気エネルギーの出力が開始された際には、熱発生電気エネルギーの出力は停止されている、又は、処置対象を変性させる程度まで発熱体の温度が上昇しない状態に熱発生電気エネルギーの出力が制御されている。また、高周波電気エネルギーの出力が開始されると、処置対象の組織インピーダンスが経時的に検出され、組織インピーダンスが閾値以上になったことに基づいて、組織インピーダンスが閾値に到達する前に比べて、熱発生電気エネルギーの電力が増加される。これにより、処置対象を変性させる程度まで発熱体の温度が上昇し、発熱体で発生する熱によって処置対象が変性する。高周波電流及び発熱体で発生する熱を用いて処置対象を変性させることにより、処置対象が凝固及び封止される。
高周波電流、熱等を用いた処置によって変性する前においては、処置対象はある程度の水分を含んでいる。このため、処置対象の変性が開始されてから処置対象の水分がある程度脱水されるまでは、把持される処置対象を含む生体組織においてエンドエフェクタの幅方向について広範囲に高周波電流が流れ易くなる。米国特許出願公開第2009/248002号明細書では、高周波電気エネルギーの出力開始と同時に、大きい電力で高周波電気エネルギーが出力され、処置対象が変性し始める。このため、高周波電気エネルギーの出力が開始された直後(処置対象が変性し始めた直後)では、処置対象はある程度の水分を含み、生体組織においてエンドエフェクタの幅方向についての高周波電流によって発生する熱の侵襲範囲が大きくなる。高周波電流を用いず、発熱体で発生する熱のみを用いて処置対象を変性させることにより、生体組織においてエンドエフェクタの幅方向についての熱の侵襲範囲が小さくなる。しかし、処置対象の変性に高周波電流が用いられないことにより、変性によって処置対象を凝固及び封止する処置において、処置での凝固性能及び封止性能が低下してしまう。
本発明は前記課題に着目してなされたものであり、その目的とするところは、処置対象を変性させる処置において生体組織での熱の侵襲範囲を小さくするとともに、処置における凝固性能及び封止性能が確保されるエネルギー処置システムを提供することにある。また、そのエネルギー処置システムに設けられるエネルギー制御装置及びエネルギー処置具を提供することにある。
前記目的を達成するため、本発明のある態様のエネルギー処置システムは、互いに対して開閉可能な一対のクランプ部を備えるとともに、前記クランプ部の間で処置対象を把持可能であり、前記クランプ部のそれぞれが電極を備えるエンドエフェクタと、第1の電気エネルギー及び第2の電気エネルギーを出力可能であるとともに、前記エンドエフェクタの前記電極に前記第1の電気エネルギーを供給することにより、前記クランプ部の間で把持される前記処置対象を通して前記電極の間で高周波電流を流し、前記第2の電気エネルギーを出力することにより、前記エンドエフェクタを作動し、前記エンドエフェクタにおいて前記処置対象の処置に用いられる熱を発生させるエネルギー出力部と、前記エネルギー出力部からの前記第1の電気エネルギー及び前記第2の電気エネルギーの出力を制御し、前記エンドエフェクタの作動で発生する前記熱によって前記第2の電気エネルギーの出力開始から継続して前記処置対象が変性する状態に、前記エネルギー出力部から前記第2の電気エネルギーを継続して出力させるとともに、前記第2の電気エネルギーの出力によって発生する前記熱が継続して前記処置対象を変性させている間の少なくとも一部の時間において、前記エネルギー出力部から前記第1の電気エネルギーを前記第2の電気エネルギーと同時に出力させ、前記熱が継続して前記処置対象を変性させている状態において、前記処置対象が所定の状態になったと判断したことに基づいて、前記処置対象が前記所定の状態になったと判断した時点より前に比べて前記第1の電気エネルギーの電力を増加させる制御部と、を備える。
本発明の別のある態様は、互いに対して開閉可能な一対のクランプ部を備えるとともに、前記クランプ部の間で処置対象を把持可能であり、前記クランプ部のそれぞれが電極を備えるエンドエフェクタが設けられるエネルギー処置具へのエネルギーの供給を制御するエネルギー制御装置であって、第1の電気エネルギー及び第2の電気エネルギーを出力可能であるとともに、前記エンドエフェクタの前記電極に前記第1の電気エネルギーを供給することにより、前記クランプ部の間で把持される前記処置対象を通して前記電極の間で高周波電流を流し、前記第2の電気エネルギーを出力することにより、前記エンドエフェクタを作動し、前記エンドエフェクタにおいて前記処置対象の処置に用いられる熱を発生させるエネルギー出力部と、前記エネルギー出力部からの前記第1の電気エネルギー及び前記第2の電気エネルギーの出力を制御し、前記エンドエフェクタの作動で発生する前記熱によって前記第2の電気エネルギーの出力開始から継続して前記処置対象が変性する状態に、前記エネルギー出力部から前記第2の電気エネルギーを継続して出力させるとともに、前記第2の電気エネルギーの出力によって発生する前記熱が継続して前記処置対象を変性させている間の少なくとも一部の時間において、前記エネルギー出力部から前記第1の電気エネルギーを前記第2の電気エネルギーと同時に出力させ、前記熱が継続して前記処置対象を変性させている状態において、前記処置対象が所定の状態になったと判断したことに基づいて、前記処置対象が前記所定の状態になったと判断した時点より前に比べて前記第1の電気エネルギーの電力を増加させる制御部と、を備える。
本発明の別のある態様は、第1の電気エネルギー及び第2の電気エネルギーを出力可能なエネルギー出力部と、前記エネルギー出力部からの前記第1の電気エネルギー及び前記第2の電気エネルギーの出力を制御する制御部と、を備えるエネルギー制御装置からエネルギーが供給されるエネルギー処置具であって、互いに対して開閉可能な一対のクランプ部を備えるとともに、前記クランプ部の間で処置対象を把持可能であり、前記クランプ部のそれぞれが電極を備えるエンドエフェクタを備え、前記エンドエフェクタの前記電極は、前記エネルギー出力部から前記第1の電気エネルギーが供給されることにより、前記クランプ部の間で把持される前記処置対象を通して前記電極の間で高周波電流を流し、前記エネルギー処置具は、前記エネルギー出力部から前記第2の電気エネルギーが供給されることにより、前記エンドエフェクタを作動し、前記エンドエフェクタにおいて前記処置対象の処置に用いられる熱を発生させ、前記エンドエフェクタでは、前記エネルギー出力部から前記第2の電気エネルギーが継続して出力されることにより、前記エンドエフェクタの作動で発生する前記熱によって前記第2の電気エネルギーの出力開始から継続して前記処置対象が変性し、前記エネルギー処置具には、前記第2の電気エネルギーの供給によって発生する前記熱が継続して前記処置対象を変性させている間の少なくとも一部の時間において、前記エネルギー出力部から前記第1の電気エネルギーが前記第2の電気エネルギーと同時に供給され、前記エンドエフェクタの前記電極では、前記熱が継続して前記処置対象を変性させている状態において前記処置対象が所定の状態になったと前記制御部が判断したことに基づいて、前記処置対象が前記所定の状態になったと判断された時点より前に比べて、前記エネルギー出力部から供給される前記第1の電気エネルギーの電力が増加する。
(第1の実施形態)
本発明の第1の実施形態について、図1乃至図6Dを参照して説明する。
本発明の第1の実施形態について、図1乃至図6Dを参照して説明する。
図1は、本実施形態のエネルギー処置具(バイポーラ処置具)2が用いられるエネルギー処置システム(バイポーラ処置システム)1を示す図である。図1に示すように、エネルギー処置具(鉗子処置具)2は、長手軸Cを有する。ここで、長手軸Cに沿う方向の一方側が先端側(図1の矢印C1側)であり、先端側とは反対が基端側(図1の矢印C2側)である。
エネルギー処置具2は、保持可能なハウジング3を備え、ハウジング3は、長手軸Cに沿って延設されるハウジング本体5と、長手軸Cに対して交差する方向へ向かってハウジング本体5から延設されるグリップ(固定ハンドル)6と、を備える。また、ハウジング3には、ハンドル(可動ハンドル)7が回動可能に取付けられ、ハンドル7がハウジング3に対して回動することにより、ハンドル7がグリップ6に対して開く又は閉じる。
ハウジング3のハウジング本体5の基端部には、ケーブル8の一端が接続されている。ケーブル8の他端は、エネルギー制御装置10に着脱可能に接続される。エネルギー制御装置10には、操作入力部としてフットスイッチ11が電気的に接続されている。エネルギー制御装置10は、フットスイッチ11での操作入力等に基づいて、エネルギー処置具2へのエネルギーの供給を制御する。なお、操作入力部は、フットスイッチ11に限るものでなく、例えば、ハウジング3に取付けられる操作ボタンであってもよい。
ハウジング本体5には、先端側から筒状のシャフト13が連結されている。シャフト13は、長手軸Cに沿って延設され、シャフト13の先端部には、エンドエフェクタ15が連結されている。エンドエフェクタ15は、第1のクランプ部16及び第2のクランプ部17を備える。一対のクランプ部16,17は、互いに対して開閉可能であり、第1のクランプ部16と第2のクランプ部17との間で処置対象を把持可能である。
図2は、エンドエフェクタ15を含むエネルギー処置具2の先端部の構成をエンドエフェクタ15の幅方向に略垂直な断面(長手軸Cに略平行な断面)で示す図であり、図3は、エンドエフェクタ15を長手軸Cに略垂直な断面で示す図である。図2は、一対のクランプ部16,17の間が開いた状態で示され、図3は、一対のクランプ部16,17の間が閉じた状態で示されている。図2及び図3に示すように、シャフト13の内部には、ロッド18が長手軸Cに沿って延設されている。ハンドル7をグリップ6に対して開く又は閉じることにより、ロッド18がシャフト13に対して長手軸Cに沿って移動する。これにより、クランプ部16,17の間が開く又は閉じる。なお、エンドエフェクタ15の幅方向とは、図2において紙面に対して垂直な方向であり、図3において矢印Bの方向である。
第1のクランプ部16は、シャフト13の先端部に回動可動に連結される支持部材(第1の支持部材)23を備える。ロッド18の先端は、支持部材23に接続されている。第1のクランプ部16の外表面(露出面)には、第2のクランプ部17と対向する把持面(第1の把持面)21と、把持面21とは反対側を向く背面(第1の背面)22と、が設けられている。一対のクランプ部16,17の間で処置対象が把持された状態では、第1のクランプ部16において把持面(第1の把持面)21が処置対象に接触する。第1のクランプ部16では、支持部材23に対して把持面21側(第2のクランプ部17へ向かう側)に、断熱性及び電気的絶縁性を有する中継部材25が、取付けられ、中継部材25に対して把持面21側に、熱伝導性が高く、かつ、導電性を有するブレード(第1の電極)26が取付けられる。そして、ブレード26と中継部材25との間に、ヒータ等の発熱体27が設けられている。したがって、第1のクランプ部16では、発熱体27は、ブレード26に対して背面22側(第2のクランプ部17から離れる側)に設けられている。また、第1のクランプ部16では、支持部材23によって背面22が形成され、ブレード(第1の電極)26によって把持面21が形成されている。支持部材23、中継部材25、ブレード26及び発熱体27は、長手軸Cに沿う方向について第1のクランプ部16の基端部から先端部まで延設されている。また、第1のクランプ部16の把持面21では、ブレード26によって稜部28が形成されている。稜部28は、把持面21において第1のクランプ部16の基端部から先端部まで延設されている。
第2のクランプ部17は、シャフト13に対して固定された状態でシャフト13の先端部に連結される支持部材(第2の支持部材)33を備える。第2のクランプ部17の外表面(露出面)には、第1のクランプ部16(の把持面21)と対向する把持面(第2の把持面)31と、把持面31とは反対側を向く背面(第2の背面)32と、が設けられている。一対のクランプ部16,17の間で処置対象が把持された状態では、第2のクランプ部17において把持面(第2の把持面)31が処置対象に接触する。第2のクランプ部17では、支持部材33に対して把持面31側(第1のクランプ部16へ向かう側)に、断熱性及び電気的絶縁性を有する受け部材35が、取付けられ、受け部材35に、導電性を有する電極部材(第2の電極)36が取付けられる。第2のクランプ部17では、支持部材33によって背面32が形成され、受け部材35及び電極部材(第2の電極)36によって把持面31が形成されている。支持部材33、受け部材35及び電極部材36は、長手軸Cに沿う方向について第2のクランプ部17の基端部から先端部まで延設されている。また、第2のクランプ部17の把持面31では、受け部材35によって受け面37が形成されている。受け面37は、把持面31において第2のクランプ部17の基端部から先端部まで延設され、一対のクランプ部16,17の間が閉じた状態において第1のクランプ部16(ブレード26)の稜部28は、第2のクランプ部17(受け部材35)の受け面37に当接可能である。そして、稜部28が受け面37に当接した状態では、第1のクランプ部16のブレード(第1の電極)26は、第2のクランプ部17の電極部材(第2の電極)36と接触しない。
なお、本実施形態では、第1のクランプ部16がシャフト13に対して回動可能であり、第2のクランプ部17がシャフト13に対し固定されているが、これに限るものではない。例えば、発熱体27が設けられる第1のクランプ部16がシャフト13に対して固定され、第2のクランプ部17がシャフト13に対して回動可能に取り付けられてもよい。また、ロッド18が長手軸Cに沿って移動することにより、クランプ部16,17の両方が回動し、クランプ部16,17の間が開く又は閉じてもよい。
図4は、エネルギー処置具2にエネルギー制御装置10からエネルギーを供給する構成を示す図である。図4に示すように、エネルギー制御装置10は、例えばコンセント又はバッテリーである電源41を備える。また、エネルギー制御装置10は、高周波電気エネルギー(第1の電気エネルギー)を出力可能なエネルギー出力部として高周波駆動回路42と、熱発生電気エネルギー(第2の電気エネルギー)を出力可能なエネルギー出力部として発熱駆動回路43と、を備える。高周波駆動回路42は、電源41からの電力を高周波電気エネルギーに変換する変換回路を備え、発熱駆動回路43は、電源41からの電力を熱発生電気エネルギーに変換する変換回路を備える。なお、高周波電気エネルギーとして出力される高周波電力Pは、交流電力であり、熱発生電気エネルギーとして出力される熱発生電力P´Aは、直流電力又は交流電力である。
エネルギー制御装置10は、制御部45、及び、メモリ等の記憶媒体46を備える。制御部45は、例えばCPU(Central Processing Unit)又はASIC(application specific integrated circuit)を備えるプロセッサを備え、プロセッサに設けられる電子回路から構成されている。また、制御部45は、単一のプロセッサから形成されてもよく、複数のプロセッサから形成されてもよい。制御部45は、バス等のインターフェースを介して、記憶媒体46に情報等を記憶可能であるとともに、記憶媒体46に記憶された情報等を読取り可能である。また、制御部45は、操作入力部であるフットスイッチ11において操作入力が行われているか否かを検出する。制御部45は、フットスイッチ11での操作入力等に基づいて、高周波駆動回路42からの高周波電気エネルギー(第1の電気エネルギー)の出力、及び、発熱駆動回路43からの熱発生電気エネルギー(第2の電気エネルギー)の出力を、バス等のインターフェースを介して制御する。また、高周波駆動回路42からの高周波電気エネルギーの出力状態、及び、発熱駆動回路43からの熱発生電気エネルギーの出力状態が、バス等のインターフェースを介して制御部45にフィードバックされる。
高周波駆動回路42には、高周波電気経路47A,47Bの一端が接続されている。高周波電気経路47A,47Bは、ケーブル8の内部及びエネルギー処置具2の内部を通って延設されている。高周波電気経路47Aの他端は、第1のクランプ部16のブレード(第1の電極)26に接続され、高周波電気経路47Bの他端は、第2のクランプ部17の電極部材(第2の電極)36に接続されている。高周波駆動回路(エネルギー出力部)42から高周波電気エネルギーが出力されることにより、高周波電気経路47Aを通してブレード26に高周波電気エネルギーが供給されるとともに、高周波電気経路47Bを通して電極部材36に高周波電気エネルギーが供給される。
ブレード(第1の電極)26に高周波電気エネルギー(第1の電気エネルギー)が供給されることにより、ブレード26は第1の電位E1を有し、電極部材(第2の電極)36に高周波電気エネルギーが供給されることにより、電極部材36は第1の電位E1とは異なる第2の電位E2を有する。したがって、ブレード26及び電極部材36に高周波電気エネルギーが供給されることにより、ブレード26(高周波電気経路47A)と電極部材36(高周波電気経路47B)との間に、高周波電圧Vが印加される。クランプ部16,17の間で処置対象が把持された状態でブレード26と電極部材36との間に高周波電圧Vが印加されることにより、把持される処置対象を通してブレード(第1の電極)26と電極部材(第2の電極)36との間で高周波電流Iが流れる。制御部45は、高周波電気エネルギーの出力を制御することにより、高周波電流I、高周波電圧V及び高周波電力Pの大きさを調整している。
制御部45には高周波駆動回路42からの高周波電気エネルギーの出力状態がフィードバックされるため、高周波電気エネルギーが出力されている状態では、制御部45に、高周波電流Iの経時的な変化、及び、高周波電圧Vの経時的な変化がフィードバックされる。制御部45は、高周波電圧Vの電圧値及び高周波電流Iの電流値に基づいて、把持される処置対象(生体組織)の組織インピーダンス(高周波インピーダンス)Zを経時的に検出する。すなわち、出力される高周波電気エネルギー(第1の電気エネルギー)に基づいて、制御部45は、組織インピーダンスZを検出する。本実施形態では、制御部45は、組織インピーダンスZに基づいて把持される処置対象での水分の脱水状態を判断する。なお、高周波電流Iと高周波電圧Vとの位相差φを規定した場合、ある実施例では組織インピーダンスZが式(1)のようにして算出される。

発熱駆動回路43には、熱発生電気経路48A,48Bの一端が接続されている。熱発生電気経路48A,48Bは、ケーブル8の内部及びエネルギー処置具2の内部を通って延設され、他端が、第1のクランプ部16の発熱体27に接続されている。発熱駆動回路(エネルギー出力部)43から熱発生電気エネルギーが出力されることにより、熱発生電気経路48A,48Bを通して発熱体27に熱発生電気エネルギーが供給される。発熱体27に熱発生電気エネルギー(第2の電気エネルギー)が供給されることにより、発熱体27に熱発生電流I´Aが流れ、エンドエフェクタ15が作動される。この際、熱発生電気経路48A,48Bの間には熱発生電圧V´Aが印加される。エンドエフェクタ15が作動される(発熱体27に熱発生電流I´Aが流れる)ことにより、発熱体27において熱発生電気エネルギーが熱に変換される。これにより、発熱体27で熱が発生し、発生した熱がブレード26を通して第1のクランプ部16の把持面(第1の把持面)21に伝達される(伝導される)。そして、伝達された熱が把持面21から把持される処置対象に付与される。制御部45は、熱発生電気エネルギーの出力を制御することにより、熱発生電流I´A、熱発生電圧V´A及び熱発生電力P´Aの大きさを調整している。熱発生電流I´A、熱発生電圧V´A及び熱発生電力P´Aの大きさが調整されることにより、発熱体27で発生する熱の発熱量Q´Aが調整され、第1のクランプ部16において把持面21(ブレード26)の温度Tが調整される。
制御部45には発熱駆動回路43からの熱発生電気エネルギーの出力状態がフィードバックされるため、熱発生電気エネルギーが出力されている状態では、制御部45に、熱発生電流I´Aの経時的な変化、及び、熱発生電圧V´Aの経時的な変化がフィードバックされる。制御部45は、熱発生電圧V´Aの電圧値及び発生電流I´Aの電流値に基づいて、発熱体27の抵抗値Rを経時的に検出する。すなわち、出力される熱発生電気エネルギーに基づいて、制御部45は、発熱体27の抵抗値Rを検出する。例えば、熱発生電気エネルギー(第2の電気エネルギー)が直流電力である場合は、発熱体27の抵抗値Rは、式(2)のようにして算出される。
発熱体27の抵抗値Rは、発熱体27の温度、すなわち、発熱体27から熱が伝達される把持面21(ブレード26)の温度Tに対応して変化し、把持面(第1の把持面)21の温度Tが高くなると、発熱体27の抵抗値Rが大きくなる。記憶媒体46には、発熱体27の抵抗値Rと把持面21での温度Tとの関係を示すテーブル等が記憶されている。制御部45は、熱発生電気エネルギーが出力されている状態において、検出された抵抗値R、及び、記憶されている抵抗値Rと温度Tとの関係を用いて、把持面21での温度Tを経時的に検出する。また、制御部45は、検出された把持面21の温度T(発熱体27の抵抗値R)に基づいて、熱発生電流I´A、熱発生電圧V´A及び熱発生電力P´Aの大きさを調整し、発熱体27での発熱量Q´Aを調整している。
次に、本実施形態のエネルギー処置システム1の作用及び効果について説明する。エネルギー処置システム1を用いて処置を行う場合は、術者はエネルギー処置具2のハウジング3を保持し、エンドエフェクタ15を腹腔等の体腔に挿入する。そして、第1のクランプ部16の把持面(第1の把持面)21と第2のクランプ部17の把持面(第2の把持面)31との間に処置対象を配置し、ハンドル7をグリップ6に対して閉じる。これにより、一対のクランプ部16,17の間が閉じ、クランプ部16,17の間で処置対象が把持される。この際、第1のクランプ部16の把持面21及び第2のクランプ部17の把持面31が処置対象に接触している。一対のクランプ部16,17の間で処置対象が把持された状態で、術者は、フットスイッチ11で操作入力を行う。これにより、エネルギー制御装置10からエネルギー処置具2にエネルギー(高周波電気エネルギー及び熱発生電気エネルギー)が供給される。
図5は、エネルギー制御装置10からエネルギー処置具2へのエネルギーの供給におけるエネルギー制御装置10での処理を示すフローチャートである。図5に示すように、エネルギー処置具2にエネルギーを供給し、把持されている処置対象の処置を行う際には、制御部45は、フットスイッチ11で操作入力が行われているか否かを検出する(ステップS101)。操作入力が検出されない限り(ステップS101-No)、ステップS101に戻る。操作入力が検出されると(ステップS101-Yes)、制御部45は、高周波駆動回路(エネルギー出力部)42から高周波電気エネルギー(高周波電力P)の出力を開始させるとともに、発熱駆動回路(エネルギー出力部)43からの熱発生電気エネルギー(熱発生電力P´A)の出力を開始させる(ステップS102)。
本実施形態では、高周波電気エネルギー(第1の電気エネルギー)の出力が開始されると、制御部45は、高周波電力Pが第1の電力P1で経時的に一定に保たれる定電力制御で、高周波電気エネルギーの出力を制御する(ステップS103)。高周波電気エネルギーが出力されることにより、把持される処置対象に高周波電流Iが流れ、処置対象が変性する。ここで、第1の電力P1は小さい。したがって、高周波電力Pが第1の電力P1で経時的に一定に保たれている状態では、把持される処置対象に流れる高周波電流Iは小さく、高周波電流Iによって発生する熱の発熱量Qも小さい。なお、第1の電力P1は、例えば1W以上15W以下であり、5W程度であることが好ましい。
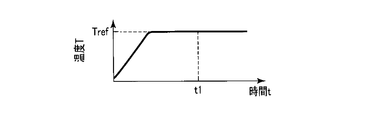
また、本実施形態では、熱発生電気エネルギー(第2の電気エネルギー)の出力が開始されると、制御部45は、把持面(第1の把持面)21の温度Tが基準温度Trefで経時的に一定に保たれる定温度制御で、熱発生電気エネルギーの出力を制御する(ステップS104)。すなわち、制御部45は、把持面21(ブレード26)の温度Tが基準温度Trefで経時的に一定に保たれる状態に、熱発生電流I´A、熱発生電圧V´A及び熱発生電力P´Aの大きさを調整し、発熱体27での発熱量Q´Aを調整している。この際、制御部45は、発熱体27の抵抗値R及び把持面21の温度Tを経時的に検出し、フィードバック制御を行っている。そして、制御部45は、発熱体27の抵抗値Rを、基準抵抗値Rrefで経時的に保つことにより、把持面21での温度T(発熱体27の温度)を基準温度Trefで経時的に一定に保っている。把持面21の温度Tが基準温度Trefで経時的に一定になる状態では、発熱体27で発生する熱によって把持される処置対象が変性する。したがって、把持面21の温度Tを基準温度Trefで経時的に一定に保つ定温度制御が熱発生電気エネルギーの出力開始から継続して行われることにより、発熱体27で発生する熱は、熱発生電気エネルギー(第2の電気エネルギー)の出力開始から継続して処置対象を変性させている。なお、基準温度Trefは、例えば100℃以上270℃以下であり、200℃程度であることが好ましい。
また、本実施形態では、高周波電気エネルギー及び熱発生電気エネルギーの出力が開始されると、制御部45は、組織インピーダンスZを経時的に検出する(ステップS105)。(高周波電気エネルギー及び)熱発生電気エネルギーの出力開始を基準とする時間tを変数として規定する。組織インピーダンスZを検出すると、制御部45は、時間tでの組織インピーダンスZ(t)がインピーダンス閾値Zth以上であったか否かを判断する(ステップS106)。本実施形態では、制御部45は、組織インピーダンスZ(t)に基づいて、(本実施形態では高周波電気エネルギーの出力開始と同時である)熱発生電気エネルギーの出力開始からの処置対象での水分の脱水状態を判断し、処置対象での脱水状態の判断結果に基づいて、処置対象が所定の状態になったか否かを判断する。ここで、処置対象の所定の状態とは、発熱体27で発生する熱(エンドエフェクタ15の作動で発生する熱)によって熱発生電気エネルギー(第2の電気エネルギー)の出力開始時から処置対象がある程度変性した状態であり、熱発生電気エネルギーの出力開始時から処置対象である程度の水分が脱水された状態である。組織インピーダンスZは、処置対象での水分が少なくなるほど、大きくなる。したがって、時間tでの組織インピーダンスZ(t)がインピーダンス閾値Zth以上であったか否かに基づいて、処置対象が所定の状態になったか否かが適切に判断される。なお、インピーダンス閾値Zthは、熱発生電気エネルギーの出力開始時の(初期状態での)組織インピーダンスZである初期インピーダンスZ0より大きいことが好ましく、例えば50Ω以上500Ω以下の範囲で設定される。
時間tでの組織インピーダンスZ(t)がインピーダンス閾値Zthより小さかった場合は(ステップS106-No)、制御部45は、処置対象が所定の状態になっていないと判断する。そして、制御部45は、フットスイッチ11で操作入力が継続されているか否かを検出する(ステップS111)。操作入力が停止されている場合は(ステップS111-Yes)、制御部45は、高周波駆動回路42からの高周波電気エネルギーの出力、及び、発熱駆動回路43からの熱発生電気エネルギーの出力を停止する(ステップS112)。操作入力が継続されている場合は(ステップS111-No)、処理はステップS103に戻り、前述したステップS103~S106の処理が継続して行われる。
ステップS106において時間tでの組織インピーダンスZ(t)がインピーダンス閾値Zth以上であった場合は(ステップS106-Yes)、制御部45は、把持されている処置対象が所定の状態になったと判断する。そして、制御部45は、高周波電力Pが第2の電力P2で経時的に一定に保たれる定電力制御で、高周波電気エネルギーの出力を制御する(ステップS107)。この際も、把持される処置対象に高周波電流Iが流れ、処置対象が変性する。ここで、第2の電力P2は、第1の電力P1は大きい。したがって、本実施形態では、発熱体27で発生する熱が処置対象を継続して変性させている状態において、制御部45は、処置対象が所定の状態になったと判断したことに基づいて、処置対象が所定の状態になったと判断した時点より前の第1の電力P1から第2の電力P2に、高周波電力Pを増加させる。第1の電力P1から第2の電力P2に高周波電力Pが増加することにより、高周波電力Pが第2の電力P2で経時的に一定に保たれている状態では、把持される処置対象に流れる高周波電流Iも大きく、高周波電流Iによって発生する熱の発熱量Qも大きい。なお、第2の電力P2は、例えば15W以上100W以下の範囲で設定される。
また、本実施形態では、処置対象が所定の状態になったと判断した後も、制御部45は、把持面(第1の把持面)21の温度Tが基準温度Trefで経時的に一定に保たれる定温度制御で、熱発生電気エネルギーの出力を制御する(ステップS108)。このため、処対象が所定の状態になったと判断された後も、発熱体27で発生した熱によって処置対象が継続して変性する。
そして、第2の電力Pでの高周波電気エネルギーの定電力制御(ステップS107)、及び、基準温度Trefでの熱発生電気エネルギーの定温度制御(ステップS108)を行っている状態で、制御部45は、フットスイッチ(操作入力部)11で操作入力が継続されているか否かを検出する(ステップS109)。操作入力が停止されている場合は(ステップS109-Yes)、制御部45は、高周波電気エネルギーの出力、及び、熱発生電気エネルギーの出力を停止する(ステップS110)。操作入力が継続されている場合は(ステップS109-No)、処理はステップS107に戻り、前述したステップS107~S109の処理が継続して行われる。
前述のように本実施形態では、発熱体27で発生する熱、及び、処置対象に流れる高周波電流Iを用いて処置対象を変性させている。高周波電流I及び発熱体27で発生する熱によって処置対象が変性することにより、処置対象が凝固及び封止される。また、本実施形態では前述のように高周波電気エネルギー及び熱発生電気エネルギーの出力が制御されるため、発熱体27で発生する熱が処置対象を継続して変性させている間(出力開始から継続して熱発生電気エネルギーが出力されている間)は、熱発生電気エネルギー(第2の電気エネルギー)と同時に高周波電気エネルギー(第1の電気エネルギー)が継続して出力される。
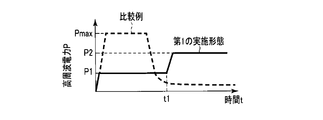
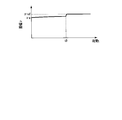
ここで、エネルギー制御装置10によって前述のようにエネルギー(高周波電気エネルギー及び熱発生電気エネルギー)の出力が制御される場合の一例として、図6Aに示すように把持面21(ブレード26)での温度Tは経時的に変化し、図6Bに示すように組織インピーダンスZは経時的に変化し、図6Cに示すように高周波電力Pは経時的に変化し、図6Dに示すようにエンドエフェクタ15の幅方向についての処置対象を含む生体組織における熱侵襲距離δは経時的に変化する。図6A乃至図6Dでは、横軸に熱発生電気エネルギーの出力開始(本実施形態では高周波電気エネルギーの出力開始と同時)を基準とする時間tを示している。そして、図6Aでは縦軸に温度Tを、図6Bでは縦軸に組織インピーダンスZを、図6Cでは縦軸に高周波電力Pを、図6Dでは縦軸に熱侵襲距離δを示している。高周波電流I及び発熱体27で発生する熱が処置対象を変性させている状態では、生体組織においてクランプ部16,17の間で把持されている処置対象以外の部位にも、高周波電流Iによって発生する熱、及び、発熱体27で発生する熱が侵襲する。したがって、処置対象が変性している状態の生体組織では、エンドエフェクタ15の幅方向(図3の矢印Bの方向)について処置対象(クランプ部16,17によって把持される部位)から処置対象以外の部位へ熱が侵襲する。ここで、処置対象が変性している状態の生体組織において、組織温度T´が境界温度T´0以上となる高温範囲Hを規定する。エンドエフェクタ15の幅方向についてエンドエフェクタ15のエッジから高温範囲Hの境界位置までの距離が、生体組織における熱侵襲距離δとなる。
前述のように本実施形態では、熱発生電気エネルギー(第2の電気エネルギー)が出力されている状態では、把持面(第1の把持面)21の温度Tを基準温度Trefで経時的に一定に保つ定温度制御が行われる。したがって、図6Aに示すように、熱発生電気エネルギーの出力開始からある程度の時間が経過すると、把持面21の温度Tが基準温度Trefまで上昇する。そして、把持面21の温度Tが基準温度Trefまで上昇した後は、把持面21の温度Tは基準温度Trefで経時的に一定に保たれる。また、本実施形態では、熱発生電気エネルギーの出力開始と同時に高周波電気エネルギーの出力が開始される。そして、高周波電気エネルギーの出力が開始されると、小さい第1の電力P1で高周波電力Pを経時的に一定に保つ定電力制御が行われる。したがって、図6Cに示すように、熱発生電気エネルギーの出力開始と同時に第1の電力P1で高周波電気エネルギーが出力され、高周波電力Pが小さい第1の電力P1で経時的に一定に保たれる。熱発生電気エネルギー及び高周波電気エネルギーの出力が開始されることにより、発熱体27で発生する熱によって処置対象が継続して変性するとともに、高周波電流Iによって処置対象が変性する。
図6Bに示すように、熱発生電気エネルギー及び高周波電気エネルギーの出力が開始されると、組織インピーダンスZは、熱発生電気エネルギーの出力開始時の(初期状態での)初期インピーダンスZ0から減少する。そして、発熱体27で発生する熱(エンドエフェクタ15の作動で発生する熱)によって熱発生電気エネルギー(第2の電気エネルギー)の出力開始時から処置対象がある程度変性し、熱発生電気エネルギーの出力開始時から処置対象である程度の水分が脱水されると、処置対象は前述の所定の状態になる。処置対象が所定の状態になることにより(すなわち、変性によって熱発生電気エネルギーの出力開始時から処置対象での水分がある程度脱水されることにより)、組織インピーダンスZが経時的に漸増する状態になる。そして、処置対象が所定の状態になった後(組織インピーダンスZが経時的な漸増を開始した後)においても、発熱体27で発生する熱及び高周波電流Iによって継続して処置対象が変性することにより、インピーダンス閾値Zthを超えて組織インピーダンスZが増加する。図6Bでは、時間t1において組織インピーダンスZがインピーダンス閾値Zthまで増加する。
したがって、制御部45は、時間t1又はその直後において、組織インピーダンスZ(t)がインピーダンス閾値Zth以上になったと判断し、処置対象が所定の状態になったと判断する。このため、図6Cに示すように、制御部45は、時間t1又はその直後において、高周波電力Pを第1の電力P1から第2の電力P2に増加させる。そして、時間t1より後においては、大きい第2の電力P2で高周波電力Pが経時的に一定に保たれる。なお、時間t1より後においても、図6Aに示すように、把持面21の温度Tが基準温度Trefで経時的に一定に保たれる。
ここで、第1の実施形態とは高周波電気エネルギーの出力の制御方法が異なる比較例を示す。比較例でも第1の実施形態と同様に、熱発生電気エネルギー及び高周波電気エネルギーが同時に出力開始されるとともに、熱発生電気エネルギーの出力開始と同時に把持面21の温度Tを基準温度Trefで経時的に一定に保つ定温度制御が行われる。ただし、比較例では、高周波電気エネルギーの出力開始と同時に第2の電力P2と同程度の大きさの、又は、第2の電力P2より大きい高周波電力Pが出力され、例えば、高周波電気エネルギーの出力開始からしばらくの間は、第2の電力P2より大きく、かつ、出力可能な範囲での高周波電力Pの最大値である最大電力Pmaxで高周波電力Pを経時的に一定に保つ定電力制御が行われる。図6C及び図6Dでは、第1の実施形態での経時的な変化を実線で示し、比較例での経時的な変化を破線で示している。
高周波電流I及び発熱体27で発生した熱によって変性する前においては、処置対象はある程度の水分を含んでいる。このため、処置対象の変性が開始されてから(熱発生電気エネルギー及び高周波電気エネルギーの出力が開始されてから)処置対象の水分がある程度脱水されるまでは、把持される処置対象を含む生体組織においてエンドエフェクタ15の幅方向について広範囲に高周波電流Iが流れ易くなる。また、比較例では、熱発生電気エネルギー及び高周波電気エネルギーの出力が開始されると同時に、高周波電力Pが大きい値(例えば最大電力Pmax)で経時的に一定に維持する制御が行われる。高周波電力Pが大きく維持されている状態では、把持される処置対象に流れる高周波電流Iは大きく、高周波電流Iによって発生する熱の発熱量Qも大きい。したがって、比較例では、熱発生電気エネルギー及び高周波電気エネルギーの出力開始直後の処置対象の水分が脱水されていない状態において、処置対象を含む生体組織の広範囲で大きい高周波電流Iが流れ、生体組織の広範囲で高周波電流Iによって大きい発熱量Qで熱が発生する。このため、出力開始直後の生体組織において、組織温度T´が境界温度T´0となる高温範囲Hが広くなり、エンドエフェクタ15の幅方向についてのエンドエフェクタ15のエッジから高温範囲Hの境界位置までの距離である生体組織での熱侵襲距離δが大きくなる。すなわち、出力開始直後において、生体組織でのエンドエフェクタ15の幅方向についての熱(特に、高周波電流Iによって発生する熱)の侵襲範囲が大きくなる。
これに対し、本実施形態では、熱発生電気エネルギー及び高周波電気エネルギーの出力開始直後において、高周波電力Pを小さい第1の電力P1で経時的に一定に保つ制御が行われる。高周波電力Pが小さく維持されている状態では、把持される処置対象に流れる高周波電流Iは小さく、高周波電流Iによって発生する熱の発熱量Qも小さい。したがって、出力開始直後の処置対象の水分が脱水されていない状態において、処置対象を含む生体組織の広範囲で高周波電流Iが流れるが、高周波電流Iによって発生する発熱量Qは小さい。このため、熱発生電気エネルギー及び高周波電気エネルギーの出力開始直後の生体組織において、組織温度T´が境界温度T´0となる高温範囲Hが小さくなり、生体組織での熱侵襲距離δが小さくなる。すなわち、出力開始直後において、生体組織でのエンドエフェクタ15の幅方向についての熱(特に、高周波電流Iによって発生する熱)の侵襲範囲が小さくなる。
また、本実施形態では、処置対象が所定の状態になったと判断されたこと、すなわち、出力開始から処置対象で水分がある程度脱水されたと判断されたことに基づいて、高周波電力Pを大きい第2の電力P2で経時的に一定に維持する定電力制御に切替えられる。高周波電力Pが大きく維持されている状態では、把持される処置対象に流れる高周波電流Iは大きく、高周波電流Iによって発生する熱の発熱量Qも大きい。ただし、本実施形態では、出力開始から処置対象で水分がある程度脱水された状態で高周波電力Pが第2の電力P2に切替えられるため、高周波電力Pが第2の電力P2で出力されている状態では、処置対象を含む生体組織において高周波電流Iが流れる範囲が小さくなる。生体組織において高周波電流Iが流れる範囲が小さくなることにより、高周波電流Iによる発熱量Qが大きくなっても、生体組織において高周波電流Iによって発生する熱が侵襲し難くなる。このため、高周波電力Pが第2の電力P2で出力されている状態での生体組織において、組織温度T´が境界温度T´0となる高温範囲Hが小さくなり、生体組織での熱侵襲距離δが小さくなる。すなわち、高周波電力Pが第2の電力P2で出力されても、生体組織でのエンドエフェクタ15の幅方向についての熱(特に、高周波電流Iによって発生する熱)の侵襲範囲が小さくなる。
前述のようにして、本実施形態では、高周波電流I及び発熱体27で発生する熱を用いて処置対象を継続して変性させる処置において、処置対象を含む生体組織での熱(高周波電流Iによって発生する熱及び発熱体27で発生する熱)の侵襲範囲を小さくすることができる。すなわち、本実施形態では、処置対象を変性させる処置が行われている間において、生体組織での熱の侵襲範囲を継続して小さく保つことができる。
また、本実施形態では、発熱体27で発生する熱に加えて処置対象に流れる高周波電流Iを用いて、処置対象を変性させている。高周波電流Iが処置に用いられることにより、処置での凝固性能及び封止性能を確保することができる。
また、本実施形態では、発熱体27で発生する熱が処置対象を継続して変性させている間(出力開始から継続して熱発生電気エネルギーが出力されている間)は、熱発生電気エネルギー(第2の電気エネルギー)と同時に高周波電気エネルギー(第1の電気エネルギー)が継続して出力される。このため、発熱体27で発生した熱によって処置対象を変性させる処置が行われている間は、処置対象に高周波電流Iが継続して付与される。したがって、処置での凝固性能及び封止性能が向上する。
(第2の実施形態)
次に、本発明の第2の実施形態について図7乃至図8Cを参照にして説明する。第2の実施形態は、第1の実施形態の構成を以下の通り変形したものである。なお、第1の実施形態と同一の部分については同一の符号を付して、その説明は省略する。
次に、本発明の第2の実施形態について図7乃至図8Cを参照にして説明する。第2の実施形態は、第1の実施形態の構成を以下の通り変形したものである。なお、第1の実施形態と同一の部分については同一の符号を付して、その説明は省略する。
図7は、本実施形態でのエネルギー制御装置10からエネルギー処置具2へのエネルギーの供給におけるエネルギー制御装置10での処理を示すフローチャートである。図7に示すように、本実施形態でも第1の実施形態と同様に、エネルギー処置具2にエネルギーを供給し、把持されている処置対象の処置を行う際には、ステップS101,S102の処理が行われる。そして、高周波電気エネルギー(第1の電気エネルギー)及び熱発生電気エネルギー(第2の電気エネルギー)の出力が開始されると、第1の実施形態と同様に、制御部45は、高周波電力Pが第1の電力P1で経時的に一定に保たれる定電力制御で、高周波電気エネルギーの出力を制御する(ステップS103)。ただし、本実施形態では、ステップS104の処理が行われず、熱発生電気エネルギー(第2の電気エネルギー)の出力が開始されると、制御部45は、把持面(第1の把持面)21の温度Tが温度(初期温度)Ta以上基準温度Tref以下の範囲で経時的に増加する状態に、熱発生電気エネルギーの出力を制御する(ステップS113)。すなわち、基準温度Tref以下の範囲において温度(初期温度)Taから温度Tが経時的に増加する状態に、熱発生電流I´A、熱発生電圧V´A及び熱発生電力P´Aが調整される。
そして、本実施形態でも第1の実施形態と同様に、ステップS105,S106,S111及びS112の処理が行われる。このため、本実施形態では、時間tでの組織インピーダンスZ(t)がインピーダンス閾値Zthより小さく(ステップS106-No)、かつ、操作入力が継続されている(ステップS111-No)限りは、ステップS103,S113,S105及びS106の処理が継続して行われる。したがって、組織インピーダンスZ(t)がインピーダンス閾値Zthより小さかったと判断される限り(すなわち、処置対象が所定の状態になっていないと判断される限り)は、把持面21の温度Tは、温度Ta以上基準温度Tref以下の範囲で経時的に増加し、基準温度Tref以下で維持される。ここで、温度Taは基準温度Trefより小さいが、把持面21の温度Tが温度(初期温度)Taから経時的に増加している状態では、発熱体27で発生する熱によって把持される処置対象が変性する。したがって、把持面21の温度Tを温度Ta以上基準温度Tref以下の範囲で経時的に増加させる制御が熱発生電気エネルギーの出力開始から継続して行われることにより、本実施形態でも、発熱体27で発生する熱は、熱発生電気エネルギー(第2の電気エネルギー)の出力開始から継続して処置対象を変性させている。なお、温度Taは、例えば60℃以上270℃以下であり、100℃程度であることが好ましい 。
時間tでの組織インピーダンスZ(t)がインピーダンス閾値Zth以上であった場合は(ステップS106-Yes)、第1の実施形態と同様に、制御部45は、高周波電力Pが第2の電力P2で経時的に一定に保たれる定電力制御で、高周波電気エネルギーの出力を制御するとともに(ステップS107)、把持面21の温度Tが基準温度Trefで経時的に一定に保たれる定温度制御で、熱発生電気エネルギーの出力を制御する(ステップS108)。ただし、本実施形態では、組織インピーダンスZ(t)がインピーダンス閾値Zth以上になったと判断した後も、制御部45は、組織インピーダンスZを継続して検出する(ステップS114)。そして、制御部45は、組織インピーダンスZ(t)がインピーダンス基準値Zref以上であったか否かを判断する(ステップS115)。インピーダンス基準値Zrefは、インピーダンス閾値Zthより大きく、例えば100Ω以上1000Ω以下の範囲で設定される。
組織インピーダンスZ(t)がインピーダンス基準値Zrefより小さかった場合は(ステップS115-No)、制御部45は、フットスイッチ11で操作入力が継続されているか否かを検出する(ステップS118)。操作入力が停止されている場合は(ステップS118-Yes)、制御部45は、高周波電気エネルギーの出力、及び、熱発生電気エネルギーの出力を停止する(ステップS119)。操作入力が継続されている場合は(ステップS119-No)、ステップS107に戻り、前述したステップS107,S108,S114及びS115の処理が継続して行われる。
ステップS115において組織インピーダンスZ(t)がインピーダンス基準値Zref以上であった場合は(ステップS115-Yes)、制御部45は、例えば、出力可能な範囲での高周波電圧Vの最大値である最大電圧Vmaxで高周波電圧Vを経時的に一定に保つ定電圧制御で、高周波電気エネルギーの出力を制御する(ステップS116)。この際、代わりに、制御部45は、高周波電気エネルギーの出力を停止させてもよい(ステップS116)。また、組織インピーダンスZ(t)がインピーダンス基準値Zref以上であったと判断したことにより(ステップS115-Yes)、制御部45は、把持面21の温度Tが温度(切開温度)Tbで経時的に一定に維持される定温度制御で、熱発生電気エネルギーの出力を制御する(ステップS117)。温度Tbは、基準温度Trefより高く、把持面21の温度Tが温度Tbで経時的に維持されることにより、把持される処置対象が切開される。したがって、ステップS115において組織インピーダンスZ(t)がインピーダンス基準値Zref以上であったと判断された後では、把持面21の温度Tが温度(切開温度)Tbで経時的に一定に維持される定温度制御が行われるため、発熱体27で発生する熱によって処置対象が切開される。なお、温度Tbは、例えば200℃以上400℃以下であり、300℃程度であることが好ましい。
本実施形態では、温度(切開温度)Tbでの熱発生電気エネルギーの定温度制御を行っている状態で、制御部45は、フットスイッチ11で操作入力が継続されているか否かを検出する(ステップS109)。操作入力が停止されている場合は(ステップS109-Yes)、制御部45は、高周波電気エネルギーの出力、及び、熱発生電気エネルギーの出力を停止する(ステップS110)。この際、ステップS116で高周波電気エネルギーが既に停止されている場合は、高周波電気エネルギーの停止を維持するとともに、熱発生電気エネルギーの出力を停止する。また、操作入力が継続されている場合は(ステップS109-No)、処理はステップS116に戻り、前述したステップS116,S117及びS109の処理が継続して行われる。
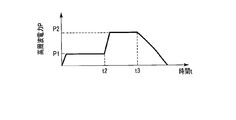
本実施形態のエネルギー制御装置10によって前述のようにエネルギーの出力が制御される場合の一例として、図8Aに示すように把持面21(ブレード26)での温度Tは経時的に変化し、図8Bに示すように組織インピーダンスZは経時的に変化し、図8Cに示すように高周波電力Pは経時的に変化する。図8A乃至図8Cでは、横軸に熱発生電気エネルギーの出力開始(本実施形態では高周波電気エネルギーの出力開始と同時)を基準とする時間tを示している。そして、図8Aでは縦軸に温度Tを、図8Bでは縦軸に組織インピーダンスZを、図8Cでは縦軸に高周波電力Pを、示している。
前述のような制御が行われるため、本実施形態では、図8Aに示すように、熱電気エネルギーの出力開始からある程度の時間が経過すると、把持面21の温度Tが温度Taまで上昇する。そして、温度Ta以上基準温度Tref以下の範囲で把持面21の温度Tが経時的に増加する。また、図8Cに示すように、熱発生電気エネルギーの出力開始と同時に第1の電力P1で高周波電気エネルギーが出力され、高周波電力Pが小さい第1の電力P1で経時的に一定に保たれる。この際、第1の実施形態と同様に、発熱体27で発生する熱によって処置対象が継続して変性されるとともに、高周波電流Iによって処置対象が変性される。
発熱体27で発生する熱(エンドエフェクタ15の作動で発生する熱)によって熱発生電気エネルギー(第2の電気エネルギー)の出力開始時から処置対象がある程度変性する(処置対象である程度の水分が脱水される)ことにより、処置対象は前述の所定の状態になり、組織インピーダンスZが経時的に漸増する状態になる。組織インピーダンスZが経時的に漸増することにより、図8Bに示すように、時間t2において組織インピーダンスZがインピーダンス閾値Zthまで増加する。制御部45は、時間t2又はその直後において、組織インピーダンスZ(t)がインピーダンス閾値Zth以上になった(処置対象が所定の状態になった)と判断する。そして、図8Aに示すように、時間t2又はその直後において、把持面21の温度Tが基準温度Trefで経時的に一定に維持される定温度制御に切替えられるとともに、図8Cに示すように、時間t2又はその直後において、高周波電力Pが大きい第2の電力P2で経時的に一定に維持される定電力制御に切替えられる。温度Trefでの定温度制御及び第2の電力P2での定電力制御に切替えられた後においても、発熱体27で発生する熱及び高周波電流Iによって、処置対象は継続して変性する。
また、組織インピーダンスZ(t)がインピーダンス閾値Zthまで増加した後においても、処置対象は継続して変性し、処置対象で水分が脱水されるため、組織インピーダンスZ(t)は継続して増加する。そして、時間t3において組織インピーダンスZ(t)がインピーダンス基準値Zrefまで増加する。制御部45は、時間t3又はその直後において、組織インピーダンスZ(t)がインピーダンス基準値Zref以上になったと判断する。そして、図8Aに示すように、時間t3又はその直後において、把持面21の温度Tが温度Tbで経時的に一定に維持される定温度制御に切替えられる。温度Tbでの定温度制御に切替えられた後は、発熱体27で発生する熱によって処置対象が切開される。また、時間t3又はその直後において、高周波電圧Vを最大電圧Vmaxで経時的に一定に維持する定電圧制御に切替えられる。組織インピーダンスZ(t)は、インピーダンス基準値Zrefまで増加した後においても、経時的に増加する。このため、最大電圧Vmaxでの定電圧制御に切替えられた後は、図8Cに示すように、高周波電力Pは第2の電力P2から経時的に減少する状態になる。
本実施形態でも、処置対象が所定の状態になるまでは(熱発生電気エネルギー及び高周波電気エネルギーの出力開始直後の処置対象の水分が脱水されていない状態では)、高周波電力Pは小さい第1の電力P1で出力され、処置対象が所定の状態になったこと(処置対象で水分がある程度脱水されたこと)に基づいて、高周波電力Pを大きい第2の電力P2に増加させる。したがって、本実施形態でも第1の実施形態で前述したように、処置対象を変性させる処置が行われている間において、生体組織での熱(特に、高周波電流Iによって発生する熱)の侵襲範囲を継続して小さく保つことができる。また、本実施形態でも、発熱体27で発生する熱に加えて処置対象に流れる高周波電流Iを用いて処置対象を変性させているため、処置での凝固性能及び封止性能を確保することができる。
また、本実施形態では、処置対象が所定の状態になったと判断されるまで(組織インピーダンスZ(t)がインピーダンス閾値Zthより小さい間)は、基準温度Trefより小さい温度(初期温度)Taから把持面21の温度Tが経時的に増加する状態に、熱電気エネルギーの出力を制御している。前述のような制御がおこなわれるため、処置対象が所定の状態になったと判断される前において、発熱体27での発熱量Q´Aが小さくなり、処置対象を含む生体組織での発熱体27で発生する熱の侵襲範囲が小さくなる。このため、処置対象を変性させる処置が行われている間において、生体組織での熱(高周波電流Iによって発生する熱及び発熱体27で発生する熱)の侵襲範囲をさらに低減させることができる。
また、本実施形態では、組織インピーダンスZ(t)がインピーダンス基準値Zref以上になったことに基づいて、把持面21の温度を基準温度Trefより大きい温度Tbで経時的に一定に保つ制御が行われる。このため、処置対象を変性させることによって処置対象を凝固及び封止させる処置を行うことに加えて、処置対象を切開する処置を行うことができる。
(第1の実施形態及び第2の実施形態の変形例)
なお、前述の実施形態では、制御部45は、組織インピーダンスZに基づいて処置対象が所定の状態になったか否かを判断しているが(図5及び図7のステップS105,S106参照)、これに限るものではない。図9は、処置対象が所定の状態になったか否かの判断における判断パラメータ及び判断条件のパターンを示す図である。前述の実施形態では、パターンX1の判断パラメータ及び判断条件で、処置対象が所定の状態になったか否かが判断される。ただし、ある変形例では、パターンX1の代わりにパターンX2~X12のいずれか1つを用いて、処置対象が所定の状態になったか否かが判断されてもよい。
なお、前述の実施形態では、制御部45は、組織インピーダンスZに基づいて処置対象が所定の状態になったか否かを判断しているが(図5及び図7のステップS105,S106参照)、これに限るものではない。図9は、処置対象が所定の状態になったか否かの判断における判断パラメータ及び判断条件のパターンを示す図である。前述の実施形態では、パターンX1の判断パラメータ及び判断条件で、処置対象が所定の状態になったか否かが判断される。ただし、ある変形例では、パターンX1の代わりにパターンX2~X12のいずれか1つを用いて、処置対象が所定の状態になったか否かが判断されてもよい。
パターンX2では、判断パラメータとして組織インピーダンス(高周波インピーダンス)Zの変化率ε及びカウント時間Yが用いられる。ここで、カウント時間Yとは、変化率εが正に切替わった時点をゼロとする時間である。パターンX2では、制御部45は、組織インピーダンスZの変化率εを経時的に検出するとともに、変化率εが正に切替わると、カウント時間Yのカウントを開始する。そして、時間tにおいて変化率ε(t)が正で、かつ、カウント時間Yが基準カウント時間Yref以上であったことに基づいて、制御部45は、組織インピーダンスZが経時的に漸増する状態に切替わったと判断する。すなわち、変化率εが正の状態が基準カウント時間Yrefの間継続したことに基づいて、組織インピーダンスZが経時的に漸増する状態に切替わったと、判断される。そして、組織インピーダンスZが経時的に漸増する状態に切替わったと判断したことに基づいて、制御部45は、処置対象が所定の状態になったと判断する。また、変化率εが正に切替わった時点から基準カウント時間Yref経過する前に、変化率εが再びゼロ又は負になった場合は、制御部45は、カウント時間Yをゼロにリセットする。
パターンX3では、判断パラメータとして高周波電流Iと高周波電圧Vとの位相差φが用いられる。この場合、制御部45は、高周波電流I及び高周波電圧Vの経時的変化から、位相差φの経時的変化を算出する。そして、時間tでの位相差φ(t)と熱発生電気エネルギーの出力開始時(処置開始時)での位相差φ(0)との差の絶対値が位相差閾値φth以上であったことに基づいて、制御部45は、処置対象が所定の状態になったと判断する。処置対象である程度の水分が脱水されることにより、高周波電気エネルギー及び熱発生電気エネルギーの出力開始時に比べ、位相差φは大きくなる。したがって、位相差φを判断基準として用いることにより、処置対象が所定の状態(出力開始時から処置対象である程度の水分が脱水された状態)になったか否かが適切に判断される。
また、第1の実施形態のように把持面21の温度Tが基準温度Trefで経時的に一定に保つ定温度制御が熱発生電気エネルギーの出力開始から継続して行われる場合は、パターンX4~X7のいずれかを用いて、処置対象が所定の状態になったか否かを判断することが可能となる。
パターンX4では、判断パラメータとして発熱体27の抵抗値Rが用いられる。この場合、制御部45は、第1の実施形態と同様に、熱発生電流I´A及び熱発生電圧V´Aの経時的変化から、抵抗値Rを経時的に算出する。そして、時間tでの抵抗値R(t)が抵抗閾値Rth以上であったことに基づいて、制御部45は、処置対象が所定の状態になったと判断する。ここで、抵抗閾値Rthは、把持面21の温度が基準温度Trefになる状態での基準抵抗値Rrefと同一、又は、基準抵抗値Rrefより僅かに小さい値に、設定される。発熱体27で発生した熱によって把持面21の温度Tが基準温度Trefまで上昇した状態では、熱発生電気エネルギーの出力開始からある程度の水分が処置対象で脱水されている。したがって、把持面21の温度Tに対応して変化する発熱体27の抵抗値Rを判断パラメータとして用いることにより、処置対象が所定の状態になったか否かが適切に判断される。
パターンX5では、判断パラメータとして発熱体27の抵抗値Rの変化率γ及びカウント時間Uが用いられる。ここで、カウント時間Uとは、変化率γの絶対値が変化率閾値γth以下に切替わった時点をゼロとする時間である。パターンX5では、制御部45は、抵抗値Rの変化率γを経時的に検出するとともに、変化率γの絶対値が変化率閾値γth以下に切替わると、カウント時間Uのカウントを開始する。そして、時間tにおいて変化率γ(t)の絶対値が変化率閾値γth以下で、かつ、カウント時間Uが基準カウント時間Uref以上であったことに基づいて、制御部45は、抵抗値Rが経時的に一定になる状態に切替わったと判断する。すなわち、変化率γの絶対値が変化率閾値γth以下の状態が基準カウント時間Urefの間継続したことに基づいて、抵抗値Rが経時的に一定になる状態に切替わったと、判断される。そして、抵抗値Rが経時的に一定になる状態に切替わったと判断したことに基づいて、制御部45は、処置対象が所定の状態になったと判断する。また、変化率γの絶対値が変化率閾値γth以下に切替わった時点から基準カウント時間Uref経過する前に、変化率γの絶対値が再び変化率閾値γthより大きくなった場合は、制御部45は、カウント時間Uをゼロにリセットする。
把持面21の温度Tが基準温度Trefで経時的に一定になる状態に切替わった際には、熱発生電気エネルギーの出力開始からある程度の水分が処置対象で脱水されている。したがって、把持面21の温度Tに対応して変化する発熱体27の抵抗値Rが基準抵抗値Rrefで経時的に一定になる状態に切替わったか否かを判断条件とすることにより、処置対象が所定の状態になったか否かが適切に判断される。
また、パターンX4で発熱体27の抵抗値Rを用いる代わりに、パターンX6では、温度センサ(図示しない)等が把持面21の温度Tを直接的に検出し、制御部45は、検出された温度Tを用いて、処置対象が所定の状態になったか否かを判断する。そして、時間tでの温度T(t)が温度閾値Tth以上であったことに基づいて、制御部45は、処置対象が所定の状態になったと判断する。
また、パターンX5で抵抗値Rの変化率γ及びカウント時間Uを用いる代わりに、パターンX7では、温度センサ等が把持面21の温度Tを直接的に検出し、制御部45は、温度Tの変化率γ´及びカウント時間U´を用いて、処置対象が所定の状態になったか否かを判断する。そして、時間tにおいて変化率γ´(t)の絶対値が変化率閾値γ´th以下で、かつ、カウント時間U´が基準カウント時間U´ref以上であったことに基づいて、制御部45は、温度Tが経時的に一定になる状態に切替わったと判断し、処置対象が所定の状態になったと判断する。すなわち、変化率γ´の絶対値が変化率閾値γ´th以下の状態が基準カウント時間U´refの間継続したことに基づいて、処置対象が所定の状態になったと、判断される。
パターンX8では、水量センサ(図示しない)等が把持される処置対象の含水量σを検出し、制御部45は、検出された含水量σに基づいて、処置対象が所定の状態になったか否かを判断する。そして、時間tでの含水量σ(t)が含水量閾値σth以下であったことに基づいて、制御部45は、処置対象が所定の状態になったと、判断する。なお、水量センサの代わりにレーザーセンサ(図示しない)を設け、処置対象での光の透過率、又は、ドップラー効果によって発生する処置対象への入射光に対する散乱光の周波数変位を検出してもよい。この場合、制御部45は、透過率又は周波数変位に基づいて、処置対象の含水量σ及び処置対象での水分の流れを検出する。そして、制御部45は、処置対象の含水量σ及び処置対象での水分の流れに基づいて、処置対象が所定の状態になったか否かを判断する。
パターンX9では、角度センサ(図示しない)等が一対のクランプ部16,17の間の開き角αを検出し、制御部45は、開き角αに基づいて、処置対象が所定の状態になったか否かを判断する。そして、時間tでの開き角α(t)が角度閾値αth以下であったことに基づいて、制御部45は、処置対象が所定の状態になったと判断する。処置対象である程度の水分が脱水されることにより、エネルギーの出力開始時に比べ、開き角αは小さくなる。したがって、開き角αを判断基準として用いることにより、処置対象が所定の状態になったか否かが適切に判断される。
パターンX10では、熱発生電気エネルギー(第2の電気エネルギー)の出力開始を基準とする時間tに基づいて、制御部45は、処置対象での水分の脱水状態を判断し、処置対象が所定の状態になったか否かを判断する。この場合、出力開始を基準とする時間tが切替え時間ta以上になったことに基づいて、すなわち、熱発生電気エネルギーの出力開始から切替え時間ta以上経過したことに基づいて、制御部45は、処置対象が所定の状態になったと判断する。パターンX10では、制御部45は、前回の熱発生電気エネルギーの出力が停止されてから今回の熱発生電気エネルギーの出力開始までのインターバル時間を算出する。そして、算出されたインターバル時間に基づいて、制御部45は、切替え時間taの長さを決定する。
また、パターンX11で示すように、高周波電気エネルギー及び熱発生電気エネルギーが同時に出力開始される場合は、高周波電気エネルギーの出力開始からの高周波電力Pの積算値Wに基づいて、制御部45は、処置対象が所定の状態になったか否かを判断してもよい。この場合、時間tでの積算値W(t)が積算閾値Wth以上になったことに基づいて、制御部45は、処置対象が所定の状態になったと判断する。パターンX11では、熱発生電気エネルギー(高周波電気エネルギー)の出力開始の直前において、制御部45は、発熱体27の抵抗値Rから把持面21の温度Tを検出する。そして、出力開始の直前での把持面21の温度Tに基づいて、積算閾値Wthの大きさを決定する。
また、パターンX12で示すように、高周波電力Pの積算値Wの代わりに熱発生電気エネルギーの出力開始からの熱発生電力P´Aの積算値W´Aを用いて、処置対象が所定の状態になったか否かを判断してもよい。この場合、制御部45は、時間tでの積算値W´A(t)が積算閾値W´Ath以上になったことに基づいて、処置対象が所定の状態になったと判断する。
また、ある変形例では、処置対象が所定の状態になったと判断したことに基づいて、制御部45が前述のように高周波電気エネルギーの出力状態を切替え可能であるとともに、術者のボタン等での操作に基づいて、制御部45は、第1の電力P1での定電力制御から第2の電力P2での定電力制御へ高周波電気エネルギーの出力状態を切替え可能であってもよい。これにより、処置対象が所定の状態になったと術者が判断した場合は、ボタン等での操作によって、高周波電気エネルギーの出力状態を切替えることが可能となる。
また、ある変形例では、第2の実施形態の図7に示す処理において、ステップS114~S119の処理が行われなくてもよい。この場合、第2の電力P2での高周波電気エネルギーの定電力制御(ステップS107)、及び、基準温度Trefでの熱発生電気エネルギーの定温度制御(ステップS108)が行われている状態で、ステップS109の判断が行われる。
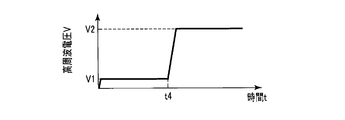
なお、前述の実施形態では、処置対象が所定の状態になったと判断したことに基づいて、第1の電力P1での定電力制御から第2の電力P2での定電力制御に高周波電力の出力が切替えられるが、これに限るものではない。例えば、図10A及び図10Bに示す第1の変形例では、高周波電気エネルギー及び熱発生電気エネルギーの出力が開始されると、第1の電力P1での定電力制御(ステップS103)の代わりに、制御部45は、第1の電圧V1で高周波電圧V(の電圧値)が経時的に一定に保たれる定電圧制御で、高周波電気エネルギーの出力を制御する。そして、処置対象が所定の状態になったと判断された後は、第2の電力P2での定電力制御(ステップS107)の代わりに、制御部45は、第1の電圧V1より大きい第2の電圧V2で高周波電圧V(の電圧値)が経時的に一定に保たれる定電圧制御で、高周波電気エネルギーの出力を制御する。
なお、本変形例のエネルギー制御装置10によってエネルギーの出力が制御される場合の一例として、図10Aに示すように高周波電圧Vは経時的に変化し、図10Bに示すように高周波電力Pは経時的に変化する。図10A及び図10Bでは、横軸に熱発生電気エネルギーの出力開始を基準とする時間tを示し、図10Aでは縦軸に高周波電圧Vを、図10Bでは縦軸に高周波電力Pを示している。本変形例でも、例えばパターンX1~X11のいずれかを用いて、処置対象が所定の状態になったか否かを判断する。図10A及び図10Bでは、時間t4又はその直後に処置対象が所定の状態(処置対象で水分がある程度脱水された状態)になったと判断され、時間t4又はその直後に、制御部45は、第1の電圧V1から第2の電圧V2に高周波電圧Vを増加させる。高周波電圧Vを増加させることにより、処置対象が所定の状態になったと判断した時点より前に比べて、高周波電力Pが増加する。
前述のように本変形例でも、処置対象が所定の状態になったと判断したことに基づいて、制御部45は、処置対象が所定の状態になったと判断した時点より前に比べて、高周波電力Pを増加させている。なお、組織インピーダンスZは、第2の電圧V2での定電圧制御に切替えられた後(処置対象が所定の状態になったと判断された後)も、経時的に増加する。このため、第2の電圧V2での定電圧制御に切替えられた後は、図10Bに示すように、高周波電力Pは経時的に減少する状態になる。
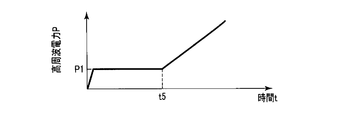
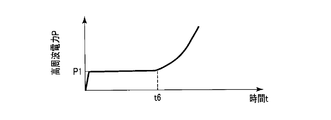
また、処置対象が所定の状態になったと判断した後において、図11Aに示す第2の変形例のように、制御部45は、高周波電力Pを第1の電力P1から経時的に一次関数状に増加させてもよく、図11Bに示す第3の変形例のように、制御部45は、高周波電力Pを第1の電力P1から経時的に二次関数状に増加させてもよい。これらの変形例のそれぞれでは、第1の実施形態と同様に、処置対象が所定の状態になったと判断されるまでは、制御部45は、高周波電力Pを小さい第1の電力P1で経時的に一定に維持する定電力制御で、高周波電気エネルギーの出力を制御している。したがって、これらの変形例のそれぞれにおいても、処置対象が所定の状態になったと判断したことに基づいて、制御部45は、処置対象が所定の状態になったと判断した時点より前に比べて、高周波電力Pを増加させている。
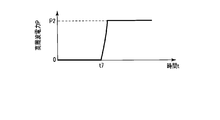
また、図11Cに示す第4の変形例のように、処置対象が所定の状態になったと判断されるまでは、熱発生電気エネルギーのみが出力され、高周波電気エネルギーが出力されていなくてもよい。本変形例では、処置対象が所定の状態になったと判断したことに基づいて、制御部45は、高周波電気エネルギーの出力を開始させ、高周波電力Pが大きい第2の電力P2で経時的に一定に維持される定電力制御で、高周波電気エネルギーの出力が制御される。したがって、処置対象が所定の状態になったと判断したことに基づいて、制御部45は、ゼロから第2の電力P2へ高周波電力を増加させている。また、本変形例では、発熱体27で発生する熱が処置対象を継続して変性させている間(出力開始から継続して熱発生電気エネルギーが出力されている間)の一部の時間でのみ(処置対象が所定の状態になったと判断された後でのみ)、熱発生電気エネルギー(第2の電気エネルギー)と同時に高周波電気エネルギー(第1の電気エネルギー)が出力される。
なお、図11A乃至図11Cでは、横軸に熱発生電気エネルギーの出力開始を基準とする時間tを示し、縦軸に高周波電力Pを示している。また、図11Aでは時間t5又はその直後に、図11Bではt6又はその直後に、図11Cでは時間t7又はその直後に、処置対象が所定の状態になったと判断され、制御部45は、処置対象が所定の状態になったと判断された時点より前に比べて、高周波電力Pを増加させている。
(第3の実施形態)
次に、本発明の第3の実施形態について図12乃至図14Aを参照にして説明する。第3の実施形態は、第1の実施形態の構成を以下の通り変形したものである。なお、第1の実施形態と同一の部分については同一の符号を付して、その説明は省略する。
次に、本発明の第3の実施形態について図12乃至図14Aを参照にして説明する。第3の実施形態は、第1の実施形態の構成を以下の通り変形したものである。なお、第1の実施形態と同一の部分については同一の符号を付して、その説明は省略する。
本実施形態では、エネルギー処置具2(エンドエフェクタ15)に発熱体27が設けられず、代わりに、ハウジング3の内部に振動発生部である(本実施形態では4つの)圧電素子51が設けられている。圧電素子51のそれぞれは、超音波電極52A,52Bの間で挟まれている。圧電素子51及び超音波電極52A,52Bは、振動伝達体50の基端部に取付けられている。振動伝達体50は、ハウジング本体5の内部からシャフト13の内部を通って、長手軸Cに沿って先端側(矢印C1側)へ向かって延設されている。そして、振動伝達体50の先端部が、シャフト13の先端から突出し、振動伝達体50の突出部分によって第2のクランプ部17が形成されている。また、本実施形態でも、シャフト13の先端部に、第1のクランプ部16が回動可能に取り付けられる。そして、ハンドル7をグリップ6に対して開く又は閉じることにより、クランプ部16,17の間が開く又は閉じる。
本実施形態では、エネルギー制御装置10は、発熱駆動回路43の代わりに超音波駆動回路55を備える。超音波駆動回路55は、電源41からの電力を振動発生電気エネルギー(超音波電気エネルギー)に変換する変換回路を備える。超音波駆動回路55からの振動発生電気エネルギー(第2の電気エネルギー)の出力は、バス等のインターフェースを介して、制御部45によって制御される。また、超音波駆動回路55からの振動発生電気エネルギーの出力状態は、バス等のインターフェースを介して制御部45にフィードバックされる。本実施形態では、フットスイッチ11の代わりに操作入力部として操作ボタン57がハウジング3に取付けられている。そして、ハウジング3の内部にはスイッチ58が設けられている。スイッチ58の開閉状態は、操作ボタン57での操作入力の有無に基づいて変化する。したがって、制御部45は、スイッチ58の開閉状態を検出することにより、操作ボタン57で操作入力が行われているか否かを検出する。
本実施形態でも、高周波駆動回路42から出力された高周波電気エネルギー(第1の電気エネルギー)は、高周波電気経路47Aを通して第1のクランプ部16に供給され、高周波電気経路47Bを通して第2のクランプ部17に供給される。これにより、クランプ部(電極)16,17の間に高周波電圧Vが印加され、把持される処置対象を通して第1のクランプ部(第1の電極)16と第2のクランプ部(第2の電極)17との間で高周波電流Iが流れる。このため、前述の実施形態等と同様に、高周波電流Iによって処置対象が変性される。また、制御部45による高周波駆動回路42からの高周波電気エネルギーの出力の制御は、第1の実施形態と同様にして行われる。
超音波駆動回路55には、振動発生電気経路56A,56Bの一端が接続されている。振動発生電気経路56A,56Bは、ケーブル8の内部を通って延設されている。そして、振動発生電気経路56Aの他端は、超音波電極(第1の超音波電極)52Aに接続され、振動発生電気経路56Bの他端は、超音波電極(第2の超音波電極)52Bに接続されている。超音波駆動回路(エネルギー出力部)55から振動発生電気エネルギーが出力されることにより、振動発生電気経路56A,56Bを通して圧電素子(振動発生部)51に振動発生電気エネルギー(第2の電気エネルギー)が供給される。これにより、超音波電極52A,52Bの間に振動発生電圧V´Bが印加され、圧電素子51に振動発生電流I´Bが流れる。
圧電素子51に振動発生電流I´Bが流れることにより、振動発生電流I´Bが超音波振動に変換され、超音波振動が発生する。圧電素子51で発生した超音波振動は、振動伝達体50において基端側から先端側へ第2のクランプ部17に向かって伝達される。第2のクランプ部17に超音波振動が伝達されることにより、エンドエフェクタ15が作動される。振動伝達体50が超音波振動を伝達している状態では、第2のクランプ部17を含む振動伝達体50は、所定の周波数範囲で振動する。この際、第2のクランプ部17(振動伝達体50)での振幅ν及び振動速度は、振動発生電流I´B(の電流値)に対応して変化し、振動発生電流I´Bが大きくなると、第2のクランプ部17での振幅ν及び振動速度は大きくなる。第2のクランプ部17が振動することにより、第2のクランプ部17と把持される処置対象との間で摩擦熱が発生し、摩擦熱によって処置対象が処置される。振動による摩擦熱の発熱量Q´Bは、第2のクランプ部17での振幅ν及び振動速度が大きくなるほど、大きくなる。本実施形態では、制御部45は、振動発生電気エネルギーの出力を制御することにより、振動発生電流I´B、振動発生電圧V´B及び振動発生電力P´Bの大きさを調整している。振動発生電流I´Bが調整されることにより、第2のクランプ部17での振幅ν及び振動速度が調整され、摩擦熱の発熱量Q´Bが調整される。
図13は、本実施形態のエネルギー制御装置10からエネルギー処置具2へのエネルギーの供給におけるエネルギー制御装置10での処理を示すフローチャートである。図13に示すように、本実施形態でも第1の実施形態で前述した図5のフローと同様にして、ステップS101,S103,S105~S107,S109~S112の処理が行われる。ただし、本実施形態では、操作ボタン57での操作入力が検出されると(ステップS101-Yes)、制御部45は、高周波電気エネルギー及び振動発生電気エネルギーを同時に出力開始させる(ステップS122)。そして、振動発生電気エネルギーの出力が開始されると、制御部45は、振動発生電流I´Bを経時的に一定の基準電流値I´Brefで保つ定電流制御で、振動発生電気エネルギーの出力を制御する(ステップS124)。振動発生電流I´Bが基準電流値I´Brefで経時的に一定に維持されることにより、第2のクランプ部17の振幅νが経時的に一定に基準振幅νrefで振動する。第2のクランプ部17が基準振幅νrefで継続して振動することにより、把持される処置対象を変性させる程度の大きい発熱量Q´Bで、超音波振動による摩擦熱が発生する。したがって、本実施形態では、振動発生電流I´Bを基準電流値I´Brefで経時的に一定に保つ定電流制御が振動発生電気エネルギーの出力開始から継続して行われることにより、超音波振動によって発生する摩擦熱は、振動発生電気エネルギー(第2の電気エネルギー)の出力開始から継続して処置対象を変性させている。
また、本実施形態でも第1の実施形態と同様にステップS103,S105~S107の処理が行われるため、処置対象が所定の状態になったと判断したことに基づいて(本実施形態では高周波インピーダンスZ(t)がインピーダンス閾値Zth以上であったことに基づいて)、制御部45は、小さい第1の電力P1での定電力制御(ステップS103)から大きい第2の電力P2での定電力制御(ステップS107)へ、高周波電気エネルギーの出力を切替える。そして、処置対象が所定の状態(処置対象で水分がある程度脱水された状態)になったと判断した後においても、制御部45は、振動発生電流I´Bが基準電流値I´Brefで経時的に一定に維持される定電流制御を継続する(ステップS128)。
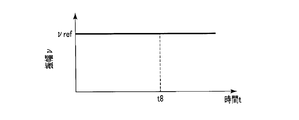
本実施形態のエネルギー制御装置10によってエネルギーの出力が制御される場合の一例として、図14に示すように第2のクランプ部17での振幅νは経時的に変化する。図14では、横軸に振動発生電気エネルギーの出力開始(高周波電気エネルギーの出力開始)を基準とする時間tを示し、縦軸に振幅νを示している。また、図14では時間t8又はその直後に、処置対象が所定の状態になったと判断され、制御部45は、第1の電力P1から第2の電力P2へ高周波電力Pを増加させている。本実施形態では、振動発生電気エネルギーの出力が開始されると、制御部45は、振動発生電流I´Bが基準電流値I´Brefで経時的に一定に維持する定電流制御を継続して行う。したがって、図14に示すように、振動発生電気エネルギーの出力が開始されると、第2のクランプ部17が基準振幅νrefで経時的に継続して振幅する。
前述のように本実施形態でも、処置対象が所定の状態になるまでは(振動発生電気エネルギー及び高周波電気エネルギーの出力開始直後の処置対象の水分が脱水されていない状態では)、高周波電力Pは小さい第1の電力P1で出力され、処置対象が所定の状態になったこと(処置対象で水分がある程度脱水されたこと)に基づいて、高周波電力Pを大きい第2の電力P2に増加させる。したがって、本実施形態でも第1の実施形態で前述したように、処置対象を変性させる処置が行われている間において、生体組織での熱(特に、高周波電流Iによって発生する熱)の侵襲範囲を継続して小さく保つことができる。また、本実施形態では、超音波振動によって発生する摩擦熱に加えて処置対象に流れる高周波電流Iを用いて処置対象を変性させているため、処置での凝固性能及び封止性能を確保することができる。
(第3の実施形態の変形例)
なお、図15に示す第3の実施形態のある変形例では、処置対象が所定の状態になったと判断するまでは、制御部45は、振動発生電流I´Bが電流値(初期電流値)I´Ba以上基準電流値I´Bref以下の範囲で経時的に増加する状態に、振動発生電気エネルギーの出力を制御する。このため、本変形例では、振動発生電気エネルギーの出力が開始されると、基準電流値I´Bref以下の範囲で電流値I´Baから振動発生電流I´Bが経時的に増加し、第2のクランプ部17での振幅νが基準振幅νref以下の範囲で振幅(初期振幅)νaから経時的に増加する。ここで、振幅νaは基準振幅νrefより小さいが、第2のクランプ部17の振幅νが振幅(初期振幅)νaから経時的に増加する状では、超音波振動による摩擦熱の発熱量Q´Bは、処置対象を変性させる程度に大きくなる。このため、本変形例でも、第2のクランプ部17の振幅νを振幅νa以上基準振幅νref以下の範囲で経時的に増加させる制御が振動発生電気エネルギーの出力開始から継続して行われることにより、超音波振動によって発生する摩擦熱は、振動発生電気エネルギー(第2の電気エネルギー)の出力開始から継続して処置対象を変性させている。
なお、図15に示す第3の実施形態のある変形例では、処置対象が所定の状態になったと判断するまでは、制御部45は、振動発生電流I´Bが電流値(初期電流値)I´Ba以上基準電流値I´Bref以下の範囲で経時的に増加する状態に、振動発生電気エネルギーの出力を制御する。このため、本変形例では、振動発生電気エネルギーの出力が開始されると、基準電流値I´Bref以下の範囲で電流値I´Baから振動発生電流I´Bが経時的に増加し、第2のクランプ部17での振幅νが基準振幅νref以下の範囲で振幅(初期振幅)νaから経時的に増加する。ここで、振幅νaは基準振幅νrefより小さいが、第2のクランプ部17の振幅νが振幅(初期振幅)νaから経時的に増加する状では、超音波振動による摩擦熱の発熱量Q´Bは、処置対象を変性させる程度に大きくなる。このため、本変形例でも、第2のクランプ部17の振幅νを振幅νa以上基準振幅νref以下の範囲で経時的に増加させる制御が振動発生電気エネルギーの出力開始から継続して行われることにより、超音波振動によって発生する摩擦熱は、振動発生電気エネルギー(第2の電気エネルギー)の出力開始から継続して処置対象を変性させている。
本変形例では、処置対象が所定の状態になったと判断したことに基づいて、制御部45は、振動発生電流I´Bが経時的に一定に基準電流値I´Brefで維持される定電流制御に切替え、第2のクランプ部17は基準振幅νrefで継続して振動する。なお、本変形例のエネルギー制御装置10によってエネルギーの出力が制御される場合は、図15に示すように第2のクランプ部17での振幅νは経時的に変化する。図15では、横軸に振動発生電気エネルギーの出力開始を基準とする時間tを示し、縦軸に振幅νを示している。また、図15では時間t9又はその直後に、処置対象が所定の状態になったと判断され、制御部45は、第1の電力P1から第2の電力P2へ高周波電力Pを増加させている。
なお、第3の実施形態のようにエネルギー制御装置10から熱発生電気エネルギーの代わりに振動発生電気エネルギーが出力される場合も、処置対象が所定の状態になったか否かの判断は、図9で前述したパターン(X1~X12)のいずれを用いて行ってもよい。ただし、熱発生電気エネルギーが出力されないため、パターンX4~X7,X12以外のパターン(X1~X3,X8~X11のいずれか)を用いて判断が行われる。
また、第3の実施形態のようにエネルギー制御装置10から熱発生電気エネルギーの代わりに振動発生電気エネルギーが出力される場合も、処置対象が所定の状態になったと判断したことに基づいて、制御部45は、第1の実施形態及び第2の実施形態で前述したように(例えば、図10A及び図10Bの変形例、図11Aの変形例、図11Bの変形例及び図11Cの変形例のいずれかに示すように)、高周波電気エネルギーの出力状態を切替えてもよい。
(その他の変形例)
前述の実施形態等では、エンドエフェクタ(15)は、互いに対して開閉可能な一対のクランプ部(16,17)を備え、クランプ部(16,17)の間で処置対象を把持可能であるとともに、クランプ部(16,17)のそれぞれは、対応する電極(26,36の対応する1つ;16,17の対応する1つ)を備える。エネルギー出力部(42,43;42,55)は、第1の電気エネルギー及び第2の電気エネルギーを出力可能である。エンドエフェクタ(15)の電極に第1の電気エネルギーが供給されることにより、クランプ部(16,17)の間で把持される処置対象を通して電極(26,36;16,17)の間で高周波電流(I)が流れ、第2の電気エネルギーが出力されることにより、エンドエフェクタ(15)が作動され、エンドエフェクタ(15)において処置対象の処置に用いられる熱が発生する。制御部(45)は、エネルギー出力部(42,43;42,55)からの第1の電気エネルギー及び第2の電気エネルギーの出力を制御し、エンドエフェクタ(15)の作動で発生する熱によって第2の電気エネルギーの出力開始から継続して処置対象が変性する状態に、エネルギー出力部(43;55)から第2の電気エネルギーを継続して出力させる。また、第2の電気エネルギーの出力によって発生する熱が継続して処置対象を変性させている間の少なくとも一部の時間において、エネルギー出力部(42,43;42,55)から第1の電気エネルギーが第2の電気エネルギーと同時に出力される。熱が継続して処置対象を変性させている状態では、制御部(45)は、処置対象が所定の状態になったと判断したことに基づいて、処置対象が前記所定の状態になったと判断した時点より前に比べて第1の電気エネルギーの電力(P)を増加させる。
前述の実施形態等では、エンドエフェクタ(15)は、互いに対して開閉可能な一対のクランプ部(16,17)を備え、クランプ部(16,17)の間で処置対象を把持可能であるとともに、クランプ部(16,17)のそれぞれは、対応する電極(26,36の対応する1つ;16,17の対応する1つ)を備える。エネルギー出力部(42,43;42,55)は、第1の電気エネルギー及び第2の電気エネルギーを出力可能である。エンドエフェクタ(15)の電極に第1の電気エネルギーが供給されることにより、クランプ部(16,17)の間で把持される処置対象を通して電極(26,36;16,17)の間で高周波電流(I)が流れ、第2の電気エネルギーが出力されることにより、エンドエフェクタ(15)が作動され、エンドエフェクタ(15)において処置対象の処置に用いられる熱が発生する。制御部(45)は、エネルギー出力部(42,43;42,55)からの第1の電気エネルギー及び第2の電気エネルギーの出力を制御し、エンドエフェクタ(15)の作動で発生する熱によって第2の電気エネルギーの出力開始から継続して処置対象が変性する状態に、エネルギー出力部(43;55)から第2の電気エネルギーを継続して出力させる。また、第2の電気エネルギーの出力によって発生する熱が継続して処置対象を変性させている間の少なくとも一部の時間において、エネルギー出力部(42,43;42,55)から第1の電気エネルギーが第2の電気エネルギーと同時に出力される。熱が継続して処置対象を変性させている状態では、制御部(45)は、処置対象が所定の状態になったと判断したことに基づいて、処置対象が前記所定の状態になったと判断した時点より前に比べて第1の電気エネルギーの電力(P)を増加させる。
なお、前述の実施形態等を適宜変更してもよく、前述の実施形態等を適宜部分的に組み合わせてもよい。
以上、本発明の実施形態等について説明したが、本発明は前述の実施形態等に限るものではなく、発明の趣旨を逸脱することなく種々の変形ができることは、もちろんである。
Claims (10)
- 互いに対して開閉可能な一対のクランプ部を備えるとともに、前記クランプ部の間で処置対象を把持可能であり、前記クランプ部のそれぞれが電極を備えるエンドエフェクタと、
第1の電気エネルギー及び第2の電気エネルギーを出力可能であるとともに、前記エンドエフェクタの前記電極に前記第1の電気エネルギーを供給することにより、前記クランプ部の間で把持される前記処置対象を通して前記電極の間で高周波電流を流し、前記第2の電気エネルギーを出力することにより、前記エンドエフェクタを作動し、前記エンドエフェクタにおいて前記処置対象の処置に用いられる熱を発生させるエネルギー出力部と、
前記エネルギー出力部からの前記第1の電気エネルギー及び前記第2の電気エネルギーの出力を制御し、前記エンドエフェクタの作動で発生する前記熱によって前記第2の電気エネルギーの出力開始から継続して前記処置対象が変性する状態に、前記エネルギー出力部から前記第2の電気エネルギーを継続して出力させるとともに、前記第2の電気エネルギーの出力によって発生する前記熱が継続して前記処置対象を変性させている間の少なくとも一部の時間において、前記エネルギー出力部から前記第1の電気エネルギーを前記第2の電気エネルギーと同時に出力させ、前記熱が継続して前記処置対象を変性させている状態において、前記処置対象が所定の状態になったと判断したことに基づいて、前記処置対象が前記所定の状態になったと判断した時点より前に比べて前記第1の電気エネルギーの電力を増加させる制御部と、
を具備するエネルギー処置システム。 - 前記制御部は、前記第2の電気エネルギーの前記出力開始からの前記処置対象での脱水状態を判断し、前記処置対象での前記脱水状態の判断結果に基づいて前記処置対象が前記所定の状態になったか否かを判断する、請求項1のエネルギー処置システム。
- 前記制御部は、出力される前記第1の電気エネルギーに基づいて前記処置対象の組織インピーダンスを経時的に検出するとともに、前記組織インピーダンスに基づいて前記処置対象での前記脱水状態を判断し、前記熱が継続して前記処置対象を変性させている状態において、前記組織インピーダンスがインピーダンス閾値以上になったこと、又は、前記組織インピーダンスが経時的に漸増する状態へ切替わったことに基づいて、前記処置対象が前記所定の状態になったと判断する、請求項2のエネルギー処置システム。
- 前記制御部は、前記第2の電気エネルギーの前記出力開始を基準とする時間に基づいて前記処置対象での前記脱水状態を判断し、前記熱が継続して前記処置対象を変性させている状態において、前記第2の電気エネルギーの前記出力開始から切替え時間以上経過したことに基づいて、前記処置対象が所定の状態になったと判断する、請求項2のエネルギー処置システム。
- 前記エンドエフェクタは、前記第2の電気エネルギーが供給されることにより、前記第2の電気エネルギーを前記処置対象の前記処置に用いられる前記熱に変換する発熱体を備え、
前記制御部は、出力される前記第2の電気エネルギーに基づいて前記発熱体の抵抗値を経時的に検出するとともに、前記抵抗値に基づいて前記処置対象での前記脱水状態を判断し、前記熱が継続して前記処置対象を変性させている状態において、前記発熱体の前記抵抗値が抵抗閾値以上になったこと、又は、前記抵抗値が経時的に一定になる状態へ切替わったこと に基づいて、前記処置対象が前記所定の状態になったと判断する、請求項2のエネルギー処置システム。 - 前記制御部は、前記熱が継続して前記処置対象を変性させている間において、前記エネルギー出力部から前記第1の電気エネルギーを前記第2の電気エネルギーと同時に継続して出力させる、請求項1のエネルギー処置システム。
- 前記一対のクランプ部のぞれぞれは、把持される前記処置対象に接触する把持面と、前記把持面とは反対側を向く背面と、を備え、
前記クランプ部の一方である第1のクランプ部は、前記電極によって前記把持面の少なくとも一部が形成され、
前記第1のクランプ部は、前記電極に対して前記第1のクランプ部の背面側に設けられるとともに、前記第2の電気エネルギーが供給されることにより、前記第2の電気エネルギーを前記処置対象の前記処置に用いられる前記熱に変換し、前記電極を通して発生した前記熱を前記把持面に伝達させる発熱体を備える、
請求項1のエネルギー処置システム。 - 前記第1のクランプ部の前記電極は、前記把持面において前記第1のクランプ部の基端部から先端部まで延設され、前記クランプ部の間を閉じた状態において前記クランプ部の他方である第2のクランプ部の前記把持面に当接可能な稜部を備える、請求項7のエネルギー処置システム。
- 互いに対して開閉可能な一対のクランプ部を備えるとともに、前記クランプ部の間で処置対象を把持可能であり、前記クランプ部のそれぞれが電極を備えるエンドエフェクタが設けられるエネルギー処置具へのエネルギーの供給を制御するエネルギー制御装置であって、
第1の電気エネルギー及び第2の電気エネルギーを出力可能であるとともに、前記エンドエフェクタの前記電極に前記第1の電気エネルギーを供給することにより、前記クランプ部の間で把持される前記処置対象を通して前記電極の間で高周波電流を流し、前記第2の電気エネルギーを出力することにより、前記エンドエフェクタを作動し、前記エンドエフェクタにおいて前記処置対象の処置に用いられる熱を発生させるエネルギー出力部と、
前記エネルギー出力部からの前記第1の電気エネルギー及び前記第2の電気エネルギーの出力を制御し、前記エンドエフェクタの作動で発生する前記熱によって前記第2の電気エネルギーの出力開始から継続して前記処置対象が変性する状態に、前記エネルギー出力部から前記第2の電気エネルギーを継続して出力させるとともに、前記第2の電気エネルギーの出力によって発生する前記熱が継続して前記処置対象を変性させている間の少なくとも一部の時間において、前記エネルギー出力部から前記第1の電気エネルギーを前記第2の電気エネルギーと同時に出力させ、前記熱が継続して前記処置対象を変性させている状態において、前記処置対象が所定の状態になったと判断したことに基づいて、前記処置対象が前記所定の状態になったと判断した時点より前に比べて前記第1の電気エネルギーの電力を増加させる制御部と、
を具備するエネルギー制御装置。 - 第1の電気エネルギー及び第2の電気エネルギーを出力可能なエネルギー出力部と、前記エネルギー出力部からの前記第1の電気エネルギー及び前記第2の電気エネルギーの出力を制御する制御部と、を備えるエネルギー制御装置からエネルギーが供給されるエネルギー処置具であって、
互いに対して開閉可能な一対のクランプ部を備えるとともに、前記クランプ部の間で処置対象を把持可能であり、前記クランプ部のそれぞれが電極を備えるエンドエフェクタを具備し、
前記エンドエフェクタの前記電極は、前記エネルギー出力部から前記第1の電気エネルギーが供給されることにより、前記クランプ部の間で把持される前記処置対象を通して前記電極の間で高周波電流を流し、
前記エネルギー処置具は、前記エネルギー出力部から前記第2の電気エネルギーが供給されることにより、前記エンドエフェクタを作動し、前記エンドエフェクタにおいて前記処置対象の処置に用いられる熱を発生させ、
前記エンドエフェクタでは、前記エネルギー出力部から前記第2の電気エネルギーが継続して出力されることにより、前記エンドエフェクタの作動で発生する前記熱によって前記第2の電気エネルギーの出力開始から継続して前記処置対象が変性し、
前記エネルギー処置具には、前記第2の電気エネルギーの供給によって発生する前記熱が継続して前記処置対象を変性させている間の少なくとも一部の時間において、前記エネルギー出力部から前記第1の電気エネルギーが前記第2の電気エネルギーと同時に供給され、
前記エンドエフェクタの前記電極では、前記熱が継続して前記処置対象を変性させている状態において前記処置対象が所定の状態になったと前記制御部が判断したことに基づいて、前記処置対象が前記所定の状態になったと判断された時点より前に比べて、前記エネルギー出力部から供給される前記第1の電気エネルギーの電力が増加する、
エネルギー処置具。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP16830310.5A EP3326562A4 (en) | 2015-07-24 | 2016-07-12 | ENERGY TREATMENT SYSTEM, ENERGY CONTROL DEVICE AND ENERGY TREATMENT TOOL |
| CN201680004833.2A CN107106232B (zh) | 2015-07-24 | 2016-07-12 | 能量处置系统、能量控制装置以及能量处置器具 |
| JP2016574013A JP6109458B1 (ja) | 2015-07-24 | 2016-07-12 | エネルギー処置システム、エネルギー制御装置及びエネルギー処置具 |
| US15/603,574 US10363083B2 (en) | 2015-07-24 | 2017-05-24 | Energy treatment system, energy control device, and energy treatment instrument |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015-146722 | 2015-07-24 | ||
| JP2015146722 | 2015-07-24 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US15/603,574 Continuation US10363083B2 (en) | 2015-07-24 | 2017-05-24 | Energy treatment system, energy control device, and energy treatment instrument |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017018205A1 true WO2017018205A1 (ja) | 2017-02-02 |
Family
ID=57884536
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/070582 WO2017018205A1 (ja) | 2015-07-24 | 2016-07-12 | エネルギー処置システム、エネルギー制御装置及びエネルギー処置具 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10363083B2 (ja) |
| EP (1) | EP3326562A4 (ja) |
| JP (1) | JP6109458B1 (ja) |
| CN (1) | CN107106232B (ja) |
| WO (1) | WO2017018205A1 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018158913A1 (ja) * | 2017-03-02 | 2018-09-07 | オリンパス株式会社 | 電源装置、高周波処置システム、及び電源装置の作動方法 |
| WO2018163329A1 (ja) * | 2017-03-08 | 2018-09-13 | オリンパス株式会社 | エネルギー源装置 |
| WO2018163330A1 (ja) * | 2017-03-08 | 2018-09-13 | オリンパス株式会社 | エネルギー源装置 |
| WO2018198339A1 (ja) * | 2017-04-28 | 2018-11-01 | オリンパス株式会社 | エネルギー処置具及び処置システム |
| KR20190112253A (ko) * | 2017-03-31 | 2019-10-04 | 주식회사 루트로닉 | Rf치료기기, rf치료기기의 제어방법 및 rf에너지를 이용한 피부치료방법 |
| JP2019205625A (ja) * | 2018-05-29 | 2019-12-05 | 小林 真 | 内視鏡用バイポーラ型加熱処置装置 |
| CN113729864A (zh) * | 2021-08-30 | 2021-12-03 | 以诺康医疗科技(苏州)有限公司 | 基于智能温度感知的超声刀血管自适应剪切方法及系统 |
| US11452558B2 (en) | 2017-03-31 | 2022-09-27 | Lutronic Corporation | RF treatment apparatus, method of controlling RF treatment apparatus and skin treatment method using RF energy |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9375586B2 (en) * | 2013-03-15 | 2016-06-28 | Pavel V. Efremkin | Apparatus and method for treatment of foot and nail diseases |
| US20210393310A1 (en) * | 2020-06-23 | 2021-12-23 | Olympus Corporation | Method for controlling a medical device and a medical device implementing the same |
| WO2022051359A1 (en) * | 2020-09-01 | 2022-03-10 | Covidien Lp | Thermal cutting elements, electrosurgical instruments including thermal cutting elements, and methods of manufacturing |
| US20220265303A1 (en) * | 2021-02-25 | 2022-08-25 | Olympus Medical Systems Corp. | Medical device and method for controlling the same including discriminating end-of-cut conditions based on temperature |
| US20220378494A1 (en) * | 2021-05-27 | 2022-12-01 | Covidien Lp | Methods for open dissection using sealing instrument |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008023335A (ja) * | 2006-07-14 | 2008-02-07 | Covidien Ag | 予熱電極を有する脈管密封器具 |
| JP2009247893A (ja) * | 2008-04-01 | 2009-10-29 | Olympus Medical Systems Corp | 治療用処置システム |
| WO2010084683A1 (ja) * | 2009-01-21 | 2010-07-29 | オリンパスメディカルシステムズ株式会社 | 治療処置装置および治療用処置具 |
| JP2010538796A (ja) * | 2007-09-18 | 2010-12-16 | サージレックス・インコーポレイテッド | 電気外科器具及び方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6736813B2 (en) * | 1998-01-23 | 2004-05-18 | Olympus Optical Co., Ltd. | High-frequency treatment tool |
| US6740085B2 (en) * | 2000-11-16 | 2004-05-25 | Olympus Corporation | Heating treatment system |
| US8500736B2 (en) | 2008-04-01 | 2013-08-06 | Olympus Medical Systems Corp. | Treatment method for living tissue using energy |
| US8500735B2 (en) | 2008-04-01 | 2013-08-06 | Olympus Medical Systems Corp. | Treatment method for living tissue using energy |
| EP2285305A2 (en) * | 2008-05-27 | 2011-02-23 | Maquet Cardiovascular LLC | Surgical instrument and method |
| JP2012165948A (ja) * | 2011-02-16 | 2012-09-06 | Olympus Medical Systems Corp | 治療用処置装置及びその製造方法 |
| DE102011082307A1 (de) * | 2011-09-07 | 2013-03-07 | Celon Ag Medical Instruments | Elektrochirurgisches Instrument, Elektrochirurgieanordnung und zugehörige Verfahren |
| CN103717161B (zh) * | 2011-12-12 | 2016-03-09 | 奥林巴斯株式会社 | 处置系统 |
| US9949785B2 (en) * | 2013-11-21 | 2018-04-24 | Ethicon Llc | Ultrasonic surgical instrument with electrosurgical feature |
-
2016
- 2016-07-12 WO PCT/JP2016/070582 patent/WO2017018205A1/ja active Application Filing
- 2016-07-12 JP JP2016574013A patent/JP6109458B1/ja active Active
- 2016-07-12 CN CN201680004833.2A patent/CN107106232B/zh active Active
- 2016-07-12 EP EP16830310.5A patent/EP3326562A4/en not_active Withdrawn
-
2017
- 2017-05-24 US US15/603,574 patent/US10363083B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008023335A (ja) * | 2006-07-14 | 2008-02-07 | Covidien Ag | 予熱電極を有する脈管密封器具 |
| JP2010538796A (ja) * | 2007-09-18 | 2010-12-16 | サージレックス・インコーポレイテッド | 電気外科器具及び方法 |
| JP2009247893A (ja) * | 2008-04-01 | 2009-10-29 | Olympus Medical Systems Corp | 治療用処置システム |
| WO2010084683A1 (ja) * | 2009-01-21 | 2010-07-29 | オリンパスメディカルシステムズ株式会社 | 治療処置装置および治療用処置具 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3326562A4 * |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018158913A1 (ja) * | 2017-03-02 | 2018-09-07 | オリンパス株式会社 | 電源装置、高周波処置システム、及び電源装置の作動方法 |
| US11317960B2 (en) | 2017-03-02 | 2022-05-03 | Olympus Corporation | Electric power source device, high-frequency treatment system, and actuating method of electric power source |
| WO2018163329A1 (ja) * | 2017-03-08 | 2018-09-13 | オリンパス株式会社 | エネルギー源装置 |
| WO2018163330A1 (ja) * | 2017-03-08 | 2018-09-13 | オリンパス株式会社 | エネルギー源装置 |
| US11507117B2 (en) | 2017-03-08 | 2022-11-22 | Olympus Corporation | Energy source apparatus |
| US11446077B2 (en) | 2017-03-08 | 2022-09-20 | Olympus Corporation | Energy source apparatus |
| KR102287415B1 (ko) | 2017-03-31 | 2021-08-11 | 주식회사 루트로닉 | Rf치료기기 |
| KR20190112253A (ko) * | 2017-03-31 | 2019-10-04 | 주식회사 루트로닉 | Rf치료기기, rf치료기기의 제어방법 및 rf에너지를 이용한 피부치료방법 |
| US11452558B2 (en) | 2017-03-31 | 2022-09-27 | Lutronic Corporation | RF treatment apparatus, method of controlling RF treatment apparatus and skin treatment method using RF energy |
| WO2018198339A1 (ja) * | 2017-04-28 | 2018-11-01 | オリンパス株式会社 | エネルギー処置具及び処置システム |
| US11666373B2 (en) | 2017-04-28 | 2023-06-06 | Olympus Corporation | Treatment system and energy treatment tool |
| JP2019205625A (ja) * | 2018-05-29 | 2019-12-05 | 小林 真 | 内視鏡用バイポーラ型加熱処置装置 |
| CN113729864A (zh) * | 2021-08-30 | 2021-12-03 | 以诺康医疗科技(苏州)有限公司 | 基于智能温度感知的超声刀血管自适应剪切方法及系统 |
| CN113729864B (zh) * | 2021-08-30 | 2023-08-29 | 以诺康医疗科技(苏州)有限公司 | 基于智能温度感知的超声刀血管自适应剪切方法及系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3326562A1 (en) | 2018-05-30 |
| CN107106232B (zh) | 2019-10-08 |
| EP3326562A4 (en) | 2019-03-13 |
| JPWO2017018205A1 (ja) | 2017-07-27 |
| JP6109458B1 (ja) | 2017-04-05 |
| US10363083B2 (en) | 2019-07-30 |
| CN107106232A (zh) | 2017-08-29 |
| US20170252087A1 (en) | 2017-09-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6109458B1 (ja) | エネルギー処置システム、エネルギー制御装置及びエネルギー処置具 | |
| US9750523B2 (en) | Ultrasonic treatment apparatus | |
| JP5911650B2 (ja) | 把持処置装置 | |
| JP6665299B2 (ja) | エネルギー制御装置、処置システム及びエネルギー制御装置の作動方法 | |
| US9597106B2 (en) | Ultrasonic treatment apparatus | |
| WO2017187524A1 (ja) | エネルギー処置具、処置システム及び制御装置 | |
| WO2015156158A1 (ja) | プラズマ処置システム | |
| WO2016067800A1 (ja) | エネルギー処置装置 | |
| JP2005253789A (ja) | 手術用処置具 | |
| US10441341B2 (en) | Treatment system and actuation method for treatment system | |
| WO2018025374A1 (ja) | 制御装置 | |
| US10045815B2 (en) | Energy treatment device and energy control device | |
| WO2016067950A1 (ja) | 把持処置ユニット、把持処置具及び把持処置システム | |
| US11564704B2 (en) | Energy treatment system | |
| JP6665300B2 (ja) | エネルギー制御装置、処置システム及びエネルギー制御装置の作動方法 | |
| WO2017187530A1 (ja) | エネルギー処置具、処置システム及び制御装置 | |
| WO2018198339A1 (ja) | エネルギー処置具及び処置システム | |
| WO2018011972A1 (ja) | エネルギー処置具、制御装置及び処置システム | |
| WO2019186662A1 (ja) | コードレス手術機器、制御方法、及び制御プログラム | |
| WO2018173151A1 (ja) | 処置システム | |
| WO2022186959A1 (en) | Computer vision based control of an energy generator |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| ENP | Entry into the national phase |
Ref document number: 2016574013 Country of ref document: JP Kind code of ref document: A |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16830310 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2016830310 Country of ref document: EP |