WO2017002453A1 - 電動ブレーキ装置 - Google Patents
電動ブレーキ装置 Download PDFInfo
- Publication number
- WO2017002453A1 WO2017002453A1 PCT/JP2016/063811 JP2016063811W WO2017002453A1 WO 2017002453 A1 WO2017002453 A1 WO 2017002453A1 JP 2016063811 W JP2016063811 W JP 2016063811W WO 2017002453 A1 WO2017002453 A1 WO 2017002453A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- control unit
- brake
- brake mechanism
- braking force
- wheel
- Prior art date
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/74—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with electrical assistance or drive
- B60T13/741—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with electrical assistance or drive acting on an ultimate actuator
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/02—Brake-action initiating means for personal initiation
- B60T7/04—Brake-action initiating means for personal initiation foot actuated
- B60T7/042—Brake-action initiating means for personal initiation foot actuated by electrical means, e.g. using travel or force sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/02—Brake-action initiating means for personal initiation
- B60T7/08—Brake-action initiating means for personal initiation hand actuated
- B60T7/10—Disposition of hand control
- B60T7/107—Disposition of hand control with electrical power assistance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/17—Using electrical or electronic regulation means to control braking
- B60T8/176—Brake regulation specially adapted to prevent excessive wheel slip during vehicle deceleration, e.g. ABS
- B60T8/1766—Proportioning of brake forces according to vehicle axle loads, e.g. front to rear of vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/32—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration
- B60T8/88—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration with failure responsive means, i.e. means for detecting and indicating faulty operation of the speed responsive control means
- B60T8/885—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration with failure responsive means, i.e. means for detecting and indicating faulty operation of the speed responsive control means using electrical circuitry
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D55/00—Brakes with substantially-radial braking surfaces pressed together in axial direction, e.g. disc brakes
- F16D55/02—Brakes with substantially-radial braking surfaces pressed together in axial direction, e.g. disc brakes with axially-movable discs or pads pressed against axially-located rotating members
- F16D55/22—Brakes with substantially-radial braking surfaces pressed together in axial direction, e.g. disc brakes with axially-movable discs or pads pressed against axially-located rotating members by clamping an axially-located rotating disc between movable braking members, e.g. movable brake discs or brake pads
- F16D55/224—Brakes with substantially-radial braking surfaces pressed together in axial direction, e.g. disc brakes with axially-movable discs or pads pressed against axially-located rotating members by clamping an axially-located rotating disc between movable braking members, e.g. movable brake discs or brake pads with a common actuating member for the braking members
- F16D55/225—Brakes with substantially-radial braking surfaces pressed together in axial direction, e.g. disc brakes with axially-movable discs or pads pressed against axially-located rotating members by clamping an axially-located rotating disc between movable braking members, e.g. movable brake discs or brake pads with a common actuating member for the braking members the braking members being brake pads
- F16D55/226—Brakes with substantially-radial braking surfaces pressed together in axial direction, e.g. disc brakes with axially-movable discs or pads pressed against axially-located rotating members by clamping an axially-located rotating disc between movable braking members, e.g. movable brake discs or brake pads with a common actuating member for the braking members the braking members being brake pads in which the common actuating member is moved axially, e.g. floating caliper disc brakes
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D65/00—Parts or details
- F16D65/14—Actuating mechanisms for brakes; Means for initiating operation at a predetermined position
- F16D65/16—Actuating mechanisms for brakes; Means for initiating operation at a predetermined position arranged in or on the brake
- F16D65/18—Actuating mechanisms for brakes; Means for initiating operation at a predetermined position arranged in or on the brake adapted for drawing members together, e.g. for disc brakes
- F16D65/183—Actuating mechanisms for brakes; Means for initiating operation at a predetermined position arranged in or on the brake adapted for drawing members together, e.g. for disc brakes with force-transmitting members arranged side by side acting on a spot type force-applying member
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2270/00—Further aspects of brake control systems not otherwise provided for
- B60T2270/40—Failsafe aspects of brake control systems
- B60T2270/402—Back-up
Definitions
- the present invention relates to an electric brake device that includes a frictional member that rotates together with a wheel and a frictional member that moves by power from an electric actuator, and obtains a braking force by pressing the frictional member against the frictional member.
- Patent Document 1 discloses an electric control brake including a brake that suppresses rotation of a wheel, a power source, and a brake control device that controls an operating state of the brake by controlling electric energy supplied from the power source.
- a switch device that is switched from a disconnected state to a connected state in accordance with a braking operation of the brake operation member is provided between the power source and the brake control device.
- a switching device that can be switched between a linked state in which the operation of a mechanical brake that is operated in accordance with the operation of the operating member is linked to the brake operating member, and a separated state that is separated from the brake operating member. Switching device that switches from the separated state to the linked state when the control brake system is abnormal It is disclosed to be those containing a control device.
- the present invention has been made in view of such circumstances, and an object thereof is to improve the convenience of the electric brake device.
- an electric brake device includes a first brake mechanism that brakes a first wheel, a second brake mechanism that brakes a second wheel, and a third brake mechanism. And a fourth brake mechanism for braking the fourth wheel, and at least three control units, each of the control units, When at least one of the four brake mechanisms is controlled and at least one of the three control units fails, at least one of the other non-failed control units is a brake mechanism to be controlled The braking force is reduced temporarily.
- the electric brake device when at least one of the three control units fails, one of the other non-failed control units increases the braking force of the brake mechanism to be controlled.
- the other one of the other non-failed control units temporarily reduces the braking force of the brake mechanism to be controlled, and then the one of the other non-failed control units
- the braking force of the brake mechanism to be controlled is increased in conjunction with the increase of the braking force.
- the first wheel and the second wheel are arranged at intervals in the full width direction of the vehicle
- the third wheel and the fourth wheel are The three control units are arranged at intervals in the full width direction and at intervals from the first wheel and the second wheel in the full length direction of the vehicle.
- an electric brake device comprising: a first brake pair comprising the first brake mechanism and the second brake mechanism; a third brake mechanism comprising the third brake mechanism and the fourth brake mechanism.
- An ideal braking force distribution value in the full length direction of the vehicle is set between the two brake pairs, and the other non-failing control unit temporarily applies the braking force of the brake mechanism to be controlled. The value is lower than the ideal braking force distribution value.
- each of the brake mechanisms is connected to a main battery and a backup battery serving as a power source for controlling and operating the brake mechanism, and to the brake mechanism when the main battery fails.
- the power supply source is switched to a backup battery.
- the electric brake device according to a sixth aspect of the invention is characterized in that the main battery and the backup battery preferentially supply power to a brake mechanism that brakes the front wheels of the vehicle.
- the first wheel is a left front wheel
- the second wheel is a right front wheel
- the third wheel is a left rear wheel
- the fourth wheel The wheel is a right rear wheel
- the first brake mechanism is a left front wheel brake mechanism
- the second brake mechanism is a right front wheel brake mechanism
- the third brake mechanism is a left rear wheel brake.
- the fourth brake mechanism is a right rear wheel brake mechanism
- the three control units are the first control unit, the second control unit, and the third control unit
- the first control unit is a first front wheel control unit
- the second control unit is a second front wheel control unit
- the third control unit is a rear wheel control unit. It is characterized by.
- the third control unit when at least one of the first control unit or the second control unit fails, the third control unit includes the left rear wheel brake mechanism and The braking force of the right rear wheel brake mechanism is temporarily reduced.
- At least one of the three control units fails, at least one of the non-failed control units temporarily reduces the braking force.
- the braking force of the target brake mechanism suddenly decreases, it is advantageous for maintaining the braking force distribution between the wheel pairs in an appropriate state.
- the invention of claim 2 when one control unit fails, one of the other control units that do not fail increases the braking force, and the other one of the other control units After the braking force is temporarily reduced, the braking force is increased in conjunction with the increase of the braking force by one of the other control units, so that the braking force of the entire vehicle is secured while preventing the wheels from being locked. This is advantageous.
- the controller that has not failed reduces the braking force based on the ideal braking force distribution value set for the vehicle, which is advantageous in stabilizing the vehicle posture during braking.
- the brake mechanism can be operated by the sub-battery even when the main battery fails, and the redundancy of the brake mechanism is reduced. It becomes advantageous in raising.
- the redundancy of the front wheel brake mechanism which is more important in braking the vehicle, is increased.
- two control units are assigned to the left and right front wheel brake mechanisms, and one control unit is assigned to the rear wheel brake mechanism on the left and right. Even if the vehicle breaks down, the remaining front wheel brake mechanism can be controlled, which is advantageous in increasing the redundancy of the front wheel brake, which is more important during braking.
- the control unit for controlling the rear wheel brake mechanism temporarily reduces the braking force. This is advantageous in keeping the braking force distribution of the front and rear wheels within an appropriate range when the braking force of the brake mechanism for the vehicle suddenly decreases.
- FIG. 3 is an explanatory diagram illustrating a configuration example of a parking brake in the electric brake device 10. It is explanatory drawing which shows the schematic structural example of a control part. It is explanatory drawing which shows the change of the braking force when a control part fails. It is explanatory drawing which shows the change of the braking force when a control part fails. It is explanatory drawing which shows the change of the braking force when a control part fails. It is explanatory drawing which shows the change of the braking force when a control part fails. It is explanatory drawing which shows the ideal braking force distribution characteristic of a front-and-back wheel. It is an Example of the electric brake device using four control parts.
- FIG. 1 is an explanatory view showing the composition of electric brake equipment 10 concerning an embodiment.
- the electric brake device 10 includes front, rear, left and right wheels 12, 14, 16, 18, brake mechanisms 20, 22, 24, 26, 34, 36 provided on the wheels, and control units 28, 30, 32, 38, 50 and operation units 52 and 54.
- the electric brake device 10 has a main battery 40 and a backup battery 42 (see FIG. 2) in addition to the configuration shown in FIG. 1, but is not shown in FIG.
- the wheels 12, 14, 16, 18 are the left front wheel 12, the right front wheel 14, the left rear wheel 16, and the right rear wheel 18, and the left front wheel brake mechanism 20 is connected to the left front wheel 12.
- the wheels 12, 14, 16, 18 are provided with a right front wheel brake mechanism 22, a left rear wheel 16 with a left rear wheel brake mechanism 24, and a right rear wheel 18 with a right rear wheel brake mechanism 26, which brake the respective wheels.
- Each brake mechanism 20, 22, 24, 26 implements a service brake, and is provided with control units 28, 30, 32, respectively.
- Each control unit 28, 30, 32 controls at least one of the brake mechanisms 20, 22, 24, 26.
- the left front wheel brake mechanism 20 and the right front wheel brake mechanism 22 are separated from the left rear wheel brake mechanism 24 and the right rear wheel by the first front wheel control unit 28 and the second front wheel control unit 30, respectively.
- the wheel brake mechanism 26 is controlled by the rear wheel control unit 32. That is, the first front wheel control unit 28 that is the first control unit controls the left front wheel brake mechanism 20 and the right front wheel brake mechanism 22, and the second front wheel control unit is the second control unit. 30 controls the left front wheel brake mechanism 20 and the right front wheel brake mechanism 22, and the third front wheel control unit 32, which is a third control unit, includes a left rear wheel brake mechanism 24 and a right rear wheel brake.
- the mechanism 26 is controlled.
- the parking control unit 38 controls the parking brake mechanisms 34 and 36.
- Each control unit 28, 30, 32, 38 is connected to a vehicle control unit 50 that controls the main control of the vehicle.
- the vehicle control unit 50 is connected to a brake pedal (service brake operation unit) 52 and a parking brake operation unit 54.
- a brake pedal 52 or the parking brake operation unit 54 When the brake pedal 52 or the parking brake operation unit 54 is operated, the respective control units 28 and 30 are connected. , 32, and 38, a control signal for instructing to operate the brake is output.
- the vehicle control unit 50 monitors the operating state of each control unit 28, 30, 32, 38, and when a failure occurs in any one of the control units 28, 30, 32, 38, the other control unit A control signal indicating a failure is output.
- the control units 28, 30, 32, and 38 are directly connected to monitor the operating state of each other. May be.
- Each brake mechanism 20, 22, 24, 26 includes a friction member that rotates together with the wheel and a friction member that moves by the power of the electric actuator, and applies braking force by pressing the friction member against the friction member.
- Electric calipers each having a pad (friction member). During normal (non-braking) time, the brake pad is located at a non-pressing position away from the brake disc.
- control units 28, 30, and 32 operate the electric actuator to move the brake pad to a pressing position where the brake pad comes into contact with the brake disc, thereby converting the kinetic energy of the wheels into heat energy, thereby causing the vehicle to have a desired vehicle speed To slow down.
- FIG. 3 is an explanatory diagram illustrating a schematic configuration example of the control unit.
- the control units 28, 30, and 32 all control two brake mechanisms, and the configuration is the same.
- FIG. 3 shows the first front wheel controller 28.
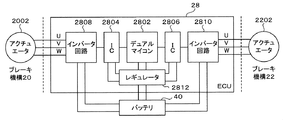
- the first front wheel controller 28 includes a dual microcomputer 2802, two integrated circuits (ICs) 2804 and 2806, two bridge (inverter) circuits 2808 and 2810, and a power supply regulator 2812. .
- the power regulator 2812 and the respective bridge circuits 2808 and 2810 are connected to the battery 40.
- the dual microcomputer 2802 is connected to the vehicle control unit 50 (not shown in FIG. 3). When a brake operation instruction is output from the vehicle control unit 50, the dual microcomputer 2802 drives the bridge circuits 2808 and 2810 to drive the battery.
- the electric power of 40 is converted into three-phase alternating current and supplied to the electric actuators 2002 and 2202 of the brake mechanism (the left front wheel brake mechanism 20 and the right front wheel brake mechanism 22 in FIG. 3) to drive the electric actuators 2002 and 2202. That is, the first front wheel control unit 28 includes a power circuit for the left front wheel brake mechanism 20 and the right front wheel brake mechanism 22. Since the operations of the bridge circuits 2808 and 2810 can be independently controlled, the electric actuators 2002 and 2202 (the left front wheel brake mechanism 20 and the right front wheel brake mechanism 22) can be independently operated. Become. As described above, the left front wheel brake mechanism 20 and the right front wheel brake mechanism 22 are controlled by the first front wheel control unit 28 and the second front wheel control unit 30.
- Electric power required by the brake mechanism 20 for the front and the brake mechanism 22 for the right front wheel is supplied by the first front wheel control unit 28 and the second front wheel control unit 30 by half.
- the operation of the brake mechanism is controlled by an electric signal, so that the operation of the brake mechanism can be finely controlled according to the situation, and hydraulic piping or the like is not required, and the vehicle weight can be significantly reduced.
- each brake mechanism 20, 22, 24, 26 is connected to the main battery 40 and the backup battery 42, and when the main battery 40 breaks down, each brake mechanism 20, The power source of the power supplies 22, 24, and 26 is configured to be switched to the backup battery 42. Thereby, the availability of the brake mechanisms 20, 22, 24, and 26 can be improved.
- the main battery 40 and the backup battery 42 are configured to supply power to the left and right front wheel brake mechanisms 20 and 22 preferentially.
- the left rear wheel 16 and the right rear wheel 18 are further provided with parking brake mechanisms 34 and 36, respectively.
- the parking brake mechanisms 34 and 36 are mainly used for preventing the vehicle from moving during parking.
- the parking brake mechanisms 34 and 36 are controlled by a parking control unit 38.
- the parking brake mechanisms 34 and 36 are electric parking brakes (EPB), and there are a plurality of configurations.
- FIG. 2 is an explanatory diagram illustrating a configuration example of a parking brake in the electric brake device 10.
- EMB 20 corresponds to the left front wheel brake mechanism
- EMB 22 corresponds to the right front wheel brake mechanism
- EMB 24 corresponds to the left rear wheel brake mechanism
- EMB 26 corresponds to the right rear wheel brake mechanism 26.
- the ECU 28 corresponds to the first front wheel control unit 28
- the ECU 30 corresponds to the second front wheel control unit
- the ECU 32 corresponds to the rear wheel control unit 32.
- the EPB 38 corresponds to the parking control unit 38.
- the left rear wheel brake mechanism 24 and the right rear wheel brake mechanism 26 serve as the parking brake mechanisms 34 and 36. That is, the parking control unit 38 operates the electric actuators of the left rear wheel brake mechanism 24 and the right rear wheel brake mechanism 26 when the parking brake is operated, and moves the brake pad to the position pressed against the brake disc. A braking force is applied to the left and right rear wheels 16,18. According to such a configuration, a parking-dedicated brake mechanism is not required, and the vehicle can be reduced in weight.
- FIG. 2B shows an example in which the parking brake mechanisms 34 and 36 are configured by a drum-in-hat (DIH) system in which brake drums are arranged in the brake discs of the left rear wheel brake mechanism 24 and the right rear wheel brake mechanism 26. is there. That is, the parking brake mechanisms 34 and 36 are provided in the hat portions located at the center of the brake pads of the left rear wheel brake mechanism 24 and the right rear wheel brake mechanism 26, respectively, And a brake shoe that is provided in the brake drum and moves between a pressed position and a non-pressed position with respect to the brake drum by an electric actuator for parking.
- DIH drum-in-hat
- the brake shoe is biased by the spring toward the inner periphery of the brake drum and is in a non-pressing position away from the brake drum.
- a brake shoe lever having one end attached to the brake shoe so as to be swingable and a wire attached to the other end is attached to the brake shoe.
- the brake shoe lever swings, the brake shoe moves against the biasing force of the spring, moves toward the outer periphery of the brake drum, and is positioned at the position pressed against the brake drum.
- the parking control unit 38 operates the parking electric actuator when the parking brake is operated, and moves the brake shoes of the parking brake mechanisms 34 and 36 to the pressing position against the brake drum 16 to thereby change the left and right rear wheels 16. , 18 is applied with a braking force.
- FIG. 2C shows an example in which brake drum type electric parking brake mechanisms 34 and 36 are configured in the brake discs of the left rear wheel brake mechanism 24 and the right rear wheel brake mechanism 26. That is, the parking brake mechanisms 34, 36 are provided in the hat portions located at the center of the brake pads of the left rear wheel brake mechanism 24 and the right rear wheel brake mechanism 26, respectively, And a brake shoe that is provided in the brake disc and moves between a pressed position and a non-pressed position with respect to the brake disc by an electric actuator for parking. Further, the parking control unit 38 is configured integrally with the parking brake mechanisms 34 and 36. During normal operation (during non-parking braking), the brake shoe is biased toward the inner periphery of the brake disc and is in a non-pressing position away from the brake disc.
- a motor having a linear motion mechanism is attached between one end of the brake shoe and one end of the brake shoe.
- the drum parking motor rotates, it pushes one end of the brake shoe through the linear motion mechanism.
- the brake shoe moves toward the outer periphery of the brake disc and is positioned at a position where the brake disc is pressed.
- the parking control unit 38 operates the parking electric actuator when the parking brake is operated, and moves the brake shoes of the parking brake mechanisms 34 and 36 to the pressing position against the brake drum 16 to thereby change the left and right rear wheels 16. , 18 is applied with a braking force.
- the electric brake device 10 controls the four brake mechanisms 20, 22, 24, 26 provided on the four wheels 12, 14, 16, 18 with the three control units 28, 30, 32. If the two control units fail, the three wheels cannot be braked, and there is a possibility that the spin will occur. For this reason, in the electric brake device 10, when any of the left front wheel, the right front wheel, the left rear wheel, and the right rear wheel is braked, any one of the three control units 28, 30, and 32 is selected. Even if one or two malfunctions, at least two wheels can be braked to ensure the steering performance of the vehicle and the braking force necessary to stop the vehicle.
- the failure of the control units 28, 30, and 32 refers to a state in which the brake mechanisms 20, 22, 24, and 26 cannot be operated, and examples include failure of a power supply circuit and disconnection of a signal line.
- the ECU 1 is in the first front wheel control unit 28, the ECU 2 is in the second front wheel control unit 30, the ECU 3 is in the rear wheel control unit 32, and the EPB is in the parking control unit 38.
- the control unit increases (or decreases) the braking force of the brake mechanism means, for example, that the power supplied from the control unit is increased (or reduced), for example, from the control unit to the brake mechanism. It indicates the magnitude of the control value, and does not necessarily indicate the braking force of the entire brake mechanism.
- the brake mechanism when the brake mechanism is controlled by a plurality of control units, even when one control unit increases the braking force of the brake mechanism, the brake mechanism as a whole is caused by factors such as failure of another control unit. In some cases, the braking force does not increase.
- the first front wheel control unit 28 and the second front wheel control unit 30 both have a predetermined braking force P1.
- the left and right front wheel brake mechanisms 20 and 22 are driven so as to be generated. That is, the left and right front wheel brake mechanisms 20 and 22 collectively generate a braking force of P1 ⁇ 2.
- the rear wheel control unit 32 (ECU 3) drives the left and right rear wheel brake mechanisms 24 and 26 so as to generate a predetermined braking force P2 ( ⁇ P1).
- the total braking force by the three controllers 28, 30, and 32 is P3.
- the first front wheel control unit 28 (ECU1) breaks down at time T1
- the power supply from the first front wheel control unit 28 to the left and right front wheel brake mechanisms 20, 22 is lost, and the second front wheel control unit Only power from 30 is supplied. Therefore, the total braking force of the left and right front wheel brake mechanisms 20, 22 is halved to P1 ⁇ 1.
- the second front wheel control unit 30 (ECU 2) increases the amount of power supplied to the left and right front wheel brake mechanisms 20, 22, so that the left and right front wheel brake mechanisms 20, 22 are more than P1 ⁇ 1. A large braking force P4 is generated.
- the rear wheel control unit 32 reduces the amount of power supplied to the left and right rear wheel brake mechanisms 24 and 26 immediately after the failure of the first front wheel control unit 28, thereby The braking force is reduced to the braking force P5 ( ⁇ P2) of the brake mechanisms 24 and 26. That is, when at least one of the three control units 28, 30, and 32 fails, at least one of the other non-failed control units (in this case, the rear wheel control unit 32) is a brake mechanism to be controlled. The braking force is temporarily reduced. This is to prevent the left and right rear wheels 16 and 18 from being locked (rear lock) due to a decrease in the braking force of the front wheel brake mechanisms 20 and 22. Thereafter, the rear wheel control unit 32 follows the increase in the braking force of the left and right front wheel brake mechanisms 20 and 22 and follows the ideal braking force distribution characteristics of the left and right rear wheel brake mechanisms 24 and 26. Increase braking force.
- FIG. 8 is an explanatory diagram showing ideal braking force distribution characteristics of the front and rear wheels.
- the vertical axis indicates the braking force distribution for the rear wheels
- the horizontal axis indicates the braking force distribution for the front wheels.
- the ideal braking force distribution is obtained by connecting points of ideal braking force distribution for each friction coefficient.
- the electric brake device 10 has a braking force applied to the front and rear wheels in accordance with an ideal braking force distribution characteristic as shown in FIG. 8A, that is, a braking force generated by the left and right front wheel brake mechanisms 20 and 22 and The braking force generated by the mechanisms 24 and 26 is distributed.
- the braking force of the front wheel brake mechanisms 20, 22 decreases as shown in FIG. 8B. That is, the braking force that was P1 ⁇ 2 becomes P1 ⁇ 1. If this is the case, the braking force of the rear wheel brake mechanisms 24, 26 is greater than the ideal braking force distribution value, and therefore rear locking occurs. In order to prevent such a rear lock, as shown in FIG. 8C, the rear wheel control unit 32 immediately applies the braking force of the left and right rear wheel brake mechanisms 24, 26 immediately after the failure of the first front wheel control unit 28. Is greatly reduced. 8 and 4, the braking force is reduced to P5 that is lower than the ideal braking force distribution value.
- the rear wheel control unit 32 determines the ideal braking force distribution characteristics of the rear wheel brake mechanisms 24 and 26. Is raised to P6 which is a value along Also, when the braking force of the front wheel brake mechanisms 20 and 22 is lower than that immediately after the failure of the first front wheel control unit 28, such as when the brake operation is loosened, the rear wheel control unit 32 is The value is in line with the ideal braking force distribution characteristics of the rear wheel brake mechanisms 24 and 26.
- one of the other non-failed control units increases the braking force of the brake mechanism to be controlled and does not break down.
- the other one of the other control units temporarily reduces the braking force of the brake mechanism to be controlled, and then controls in conjunction with the increase of the braking force by one of the other control units that do not malfunction. Increase the braking force of the target brake mechanism.
- the control unit for reducing the braking force temporarily sets the braking force of the brake mechanism to be controlled to a value lower than the ideal braking force distribution value in the full length direction (front-rear direction) of the vehicle.
- the rear wheel control unit 32 sets the left rear wheel brake.
- the braking force of the mechanism 24 and the right rear wheel brake mechanism 26 is temporarily reduced.
- the rear wheel control unit 32 sets the braking force of the left rear wheel brake mechanism 24 and the right rear wheel brake mechanism 26 to a value lower than the ideal braking force distribution value of the front and rear wheels in the vehicle.
- the first front wheel control unit 28 or the second front wheel control unit 30 when one of the first front wheel control unit 28 or the second front wheel control unit 30 fails, the first front wheel control unit 28 or the second front wheel control unit 30 The other increases the braking force of the left front wheel brake mechanism 20 and the right front wheel brake mechanism 22, and the rear wheel control unit 32 increases the braking force of the left rear wheel brake mechanism 24 and the right rear wheel brake mechanism 26. After the temporary reduction, the left rear wheel brake mechanism 24 and the right rear wheel are interlocked with the increase in the braking force of the left front wheel brake mechanism 20 and the right front wheel brake mechanism 22 by the other control unit that has not failed. The braking force of the brake mechanism 26 is increased. In the case where the second front wheel control unit 30 fails, the first front wheel control unit 28 and the second front wheel control unit 30 in the above description may be replaced with each other.
- the first front wheel control unit 28 and the second front wheel control unit 30 both have a predetermined braking force P1.
- the left and right front wheel brake mechanisms 20 and 22 are driven so as to be generated. That is, the left and right front wheel brake mechanisms 20 and 22 collectively generate a braking force of P1 ⁇ 2.
- the rear wheel control unit 32 (ECU 3) drives the left and right rear wheel brake mechanisms 24 and 26 so as to generate a predetermined braking force P2 ( ⁇ P1).
- the total braking force by the three controllers 28, 30, and 32 is P3.
- the rear wheel control unit 32 (ECU 3) fails at time T1, the power supply from the rear wheel control unit 32 to the left and right rear wheel brake mechanisms 24, 26 is lost, and the left and right rear wheel brake mechanisms 24, 26 are lost.
- the first front wheel control unit 28 and the second front wheel control unit 30 increase the power supplied to the left front wheel brake mechanism 20 and the right front wheel brake mechanism 22, respectively, and P3 (> P1) x 2 braking force is generated.
- the parking control unit 38 operates the parking brake mechanisms 34 and 36 to generate a braking force for braking the rear wheels 16 and 18.
- the braking force of the parking brake mechanisms 34 and 36 is lower than that of the left rear wheel brake mechanism 24 and the right rear wheel brake mechanism 26 that are service brakes, but gives a constant braking force to the rear wheels 16 and 18. And higher braking force can be obtained.
- the first front wheel control unit 28 and the second front wheel control unit 30 use the braking force of the left front wheel brake mechanism 20 and the right front wheel brake mechanism 22. Increase each.
- the parking control unit 38 operates the parking brake mechanisms 34 and 36 to generate a braking force for the left rear wheel 16 and the right rear wheel 18.
- the front wheel brake mechanism is set so as to output a stronger braking force than the rear wheel brake mechanism. For this reason, braking may be performed only with the left front wheel brake mechanism 20 and the right front wheel brake mechanism 22 without operating the parking brake mechanisms 34 and 36, but the parking brake mechanisms 34 and 36 are operated to move the vehicle forward and backward.
- the parking brake mechanisms 34 and 36 are operated to move the vehicle forward and backward.
- FIG. 6A a case where one of the front wheel control units (the first front wheel control unit 28 or the second front wheel control unit 30) and the rear wheel control unit 32 are sequentially failed will be described.
- FIG. 6B the case where the first front wheel control unit 28 (ECU1) fails first and then the rear wheel control unit 32 (ECU3) fails will be described as an example.
- the first front wheel control unit 28 and the second front wheel control unit 30 both have a predetermined braking force P1.
- the left and right front wheel brake mechanisms 20 and 22 are driven so as to be generated.
- the left and right front wheel brake mechanisms 20 and 22 collectively generate a braking force of P1 ⁇ 2.
- the rear wheel control unit 32 (ECU 3) drives the left and right rear wheel brake mechanisms 24 and 26 so as to generate a predetermined braking force P2 ( ⁇ P1).
- P2 predetermined braking force
- the total braking force by the three controllers 28, 30, and 32 is P3. If the first front wheel control unit 28 (ECU1) breaks down at time T1, the power supply from the first front wheel control unit 28 to the left and right front wheel brake mechanisms 20, 22 is lost, and the second front wheel control unit Only power from 30 is supplied. Therefore, the total braking force of the left and right front wheel brake mechanisms 20, 22 is halved to P1 ⁇ 1. In this case, the second front wheel control unit 30 (ECU 2) increases the amount of power supplied to the left and right front wheel brake mechanisms 20, 22, so that the left and right front wheel brake mechanisms 20, 22 are more than P1 ⁇ 1. A large braking force P4 is generated.
- the rear wheel control unit 32 reduces the amount of power supplied to the left and right rear wheel brake mechanisms 24 and 26 immediately after the failure of the first front wheel control unit 28, thereby The braking force is temporarily reduced to the braking force P5 ( ⁇ P2) of the brake mechanisms 24 and 26. This is to prevent the left and right rear wheels 16 and 18 from being locked (rear lock) due to a decrease in the braking force of the front wheel brake mechanisms 20 and 22 as described above. Thereafter, the rear wheel control unit 32 follows the increase in the braking force of the left and right front wheel brake mechanisms 20 and 22 and follows the ideal braking force distribution characteristics of the left and right rear wheel brake mechanisms 24 and 26. Increase braking force to P6.
- the rear wheel control unit 32 (ECU 3) breaks down at time T2
- power is not supplied from the rear wheel control unit 32 to the left and right rear wheel brake mechanisms 24, 26, and the left and right rear wheel brake mechanisms 24 are stopped.
- 26 is zero.
- the second front wheel control unit 30 further increases the power supplied to the left front wheel brake mechanism 20 and the right front wheel brake mechanism 22, so that the left and right front wheel brake mechanisms 20, 22 are larger than P4.
- a braking force P7 is generated.
- the parking control unit 38 operates the parking brake mechanisms 34 and 36 to generate a braking force for braking the rear wheels 16 and 18.
- the braking force of the parking brake mechanisms 34 and 36 is lower than that of the left rear wheel brake mechanism 24 and the right rear wheel brake mechanism 26 that are service brakes, but gives a constant braking force to the rear wheels 16 and 18. Can do.
- the first front wheel control unit 28 or the second front wheel control unit 30 and the rear wheel control unit 32 fail, the first front wheel control unit 28 or the second front wheel control unit 28
- the other of the front wheel control units 30 increases the braking force of the left front wheel brake mechanism 20 and the right front wheel brake mechanism 22, and the parking control unit 38 operates the parking brake mechanisms 34 and 36 to operate the left rear wheel 16. And the braking force with respect to the right rear wheel 18 is generated.
- the rear wheel control unit 32 fails first, and then one of the front wheel control units (the first front wheel control unit 28 or the second front wheel control unit 30) fails.
- the first front wheel control unit 28 and the second front wheel control unit 30 are connected to the left front wheel brake mechanism 20 and the right front wheel, respectively.
- the braking force of the brake mechanism 22 is increased.
- the parking control unit 38 operates the parking brake mechanisms 34 and 36 to brake the rear wheels 16 and 18.
- the front wheel control unit on the non-failed side causes the left and right front wheel brake mechanisms 20 and 22 to generate a larger braking force. . That is, even if the order of failure is different, the final state is the same as in FIG.
- FIG. 7A a case will be described in which both of the front wheel control units (the first front wheel control unit 28 and the second front wheel control unit 30) sequentially fail.
- FIG. 7B the case where the first front wheel control unit 28 fails first and then the second front wheel control unit 30 fails will be described as an example.
- the first front wheel control unit 28 and the second front wheel control unit 30 both have a predetermined braking force P1.
- the left and right front wheel brake mechanisms 20 and 22 are driven so as to be generated. That is, the left and right front wheel brake mechanisms 20 and 22 collectively generate a braking force of P1 ⁇ 2.
- the rear wheel control unit 32 (ECU 3) drives the left and right rear wheel brake mechanisms 24 and 26 so as to generate a predetermined braking force P2 ( ⁇ P1).
- the total braking force by the three controllers 28, 30, and 32 is P3.
- the first front wheel control unit 28 (ECU1) breaks down at time T1
- the power supply from the first front wheel control unit 28 to the left and right front wheel brake mechanisms 20, 22 is lost, and the second front wheel control unit Only power from 30 is supplied. Therefore, the total braking force of the left and right front wheel brake mechanisms 20, 22 is halved to P1 ⁇ 1.
- the second front wheel control unit 30 (ECU 2) increases the amount of power supplied to the left and right front wheel brake mechanisms 20, 22, so that the left and right front wheel brake mechanisms 20, 22 are more than P1 ⁇ 1. A large braking force P4 is generated.
- the rear wheel control unit 32 (ECU 3) temporarily reduces the amount of power supplied to the left and right rear wheel brake mechanisms 24, 26 immediately after the failure of the first front wheel control unit 28, and The braking force is reduced to the braking force P5 ( ⁇ P2) of the rear wheel brake mechanisms 24, 26. This is to prevent the left and right rear wheels 16 and 18 from being locked (rear lock) due to a decrease in the braking force of the front wheel brake mechanisms 20 and 22 as described above. Thereafter, the rear wheel control unit 32 follows the increase in the braking force of the left and right front wheel brake mechanisms 20 and 22 and follows the ideal braking force distribution characteristics of the left and right rear wheel brake mechanisms 24 and 26. Increase braking force to P6.
- the rear wheel control unit 32 (ECU 3) reduces the amount of power supplied to the left and right rear wheel brake mechanisms 24 and 26 immediately after the failure of the second front wheel control unit 30, thereby The braking force is reduced to the braking force P7 ( ⁇ P6) of the mechanisms 24 and 26. This is to prevent the rear lock caused by the braking force of the front wheel brake mechanisms 20, 22 suddenly becoming zero. Thereafter, the rear wheel control unit 32 gradually increases the power supplied to the left and right rear wheel brake mechanisms 24 and 26 to brake the vehicle with a braking force (P8 in FIG. 7) that does not cause a rear lock.
- the control unit 30 may be replaced with the left front wheel brake mechanism 20 and the right front wheel brake mechanism 22, respectively.
- Another form of failure is when the rear wheel control unit 32 and the parking control unit 38 fail.
- the first front wheel control unit 28 and the second front wheel control unit are used.
- the braking force of the left and right front wheel brake mechanisms 20, 22 may be increased by the control unit 30.
- the electric brake device 10 when at least one of the three control units 28, 30, and 32 fails, at least one of the non-failed control units gives the braking force. Since it is temporarily reduced, it is advantageous in maintaining the braking force distribution between the wheel pairs in an appropriate state when the braking force of the brake mechanism to be controlled by the malfunctioning control unit suddenly decreases.
- the electric brake device 10 can control the four brake mechanisms 20, 22, 24, and 26 with the three control units 28, 30, and 32, the number of parts of the electric brake device 10 is reduced and the vehicle cost is reduced. This is advantageous.
- the electric brake device 10 increases the braking force of one of the other control units that do not fail, and the other control unit that does not fail.
- the electric brake device 10 controls the first brake mechanism and the second brake mechanism with the two control units, it is advantageous in increasing the availability of the first brake mechanism and the second brake mechanism.
- the electric brake device 10 assigns two control units 28 and 30 to the left and right front wheel brake mechanisms 20 and 22, and assigns one control unit 32 on the left and right sides to the rear wheel brake mechanisms 24 and 26. Therefore, even if one control unit fails, the remaining front wheel brake mechanisms 20 and 22 can be controlled, which is advantageous in increasing the redundancy of the front wheel brake, which is more important during braking.
- the electric brake device 10 reduces the braking force based on the ideal braking force distribution value set in the vehicle, the controller that is not malfunctioning is advantageous in stabilizing the vehicle posture during braking. .
- the electric brake device 10 temporarily reduces the braking force of the rear wheel brake mechanisms 24 and 26 when at least one of the first front wheel control unit 28 or the second front wheel control unit 30 fails. Therefore, when the braking force of the front-wheel brake mechanisms 20 and 22 suddenly decreases due to a failure of the front-wheel control unit, rear-locking is prevented from occurring due to the braking force distribution of the front and rear wheels deviating from the ideal braking force distribution. This is advantageous.
- the electric brake device 10 temporarily reduces the braking force of the rear wheel brake mechanisms 24 and 26 when one of the front wheel control units 28 and 30 breaks down, and then uses the other of the front wheel control units 28 and 30. Since the braking force of the rear wheel brake mechanisms 24, 26 is increased in conjunction with the increase of the braking force of the front wheel brake mechanisms 20, 22, it is advantageous in securing the braking force of the entire vehicle while preventing the rear lock. . Further, when the rear wheel control unit 32 breaks down, the electric brake device 10 increases the braking force of the left front wheel brake mechanism 20 and the right front wheel brake mechanism 22, respectively. This is advantageous in ensuring a braking force close to that before the failure.
- the electric brake device 10 operates the parking brake mechanisms 34 and 36 to generate braking force for the left rear wheel 16 and the right rear wheel 18 when the rear wheel control unit 32 breaks down. It is possible to prevent the power distribution from changing extremely and obtain a higher braking force. In addition, when one of the front wheel control units 28 and 30 and the rear wheel control unit 32 break down, the electric brake device 10 applies the braking force of the front wheel brake mechanisms 20 and 22 by the front wheel control units 28 and 30.
- each brake mechanism 20, 22, 24, 26 obtains a braking force by pressing the friction member with the electric actuator against the friction target member that rotates together with the wheel. This is advantageous in improving the responsiveness to the brake operation as compared with the type brake, and is advantageous in performing various brake controls according to the vehicle state.
- the electric brake device 10 uses a brake disc as a friction member and a brake pad as a friction member and employs a disc brake system with high heat dissipation, which is advantageous in improving the durability of the brake mechanism. .
- the left rear wheel brake mechanism 24 and the right rear wheel brake mechanism 26 serve also as the parking brake mechanisms 34 and 36, the vehicle is compared with the case where a dedicated parking brake mechanism is provided. This is advantageous in reducing the weight of the vehicle and simplifying the vehicle configuration.
- the left rear wheel brake mechanism 24 and the right rear wheel brake mechanism 26 are This is advantageous in reducing the load on each brake mechanism as compared with the case where the parking brake mechanisms 34 and 36 are also used. Further, since the electric brake device 10 is provided with two batteries for supplying electric power to the brake mechanisms 20, 22, 24, 26, the brake mechanism 20, 22, 24 is operated by the sub battery 42 even when the main battery 40 fails. , 26 can be operated, which is advantageous in increasing the redundancy of the brake mechanisms 20, 22, 24, 26.
- the four wheels of the vehicle are spaced apart in the full width direction from the first wheel pair consisting of the first wheel and the second wheel that are spaced apart in the full width direction of the vehicle.
- the first wheel pair and the second wheel pair that are spaced from the first wheel pair in the full length direction of the vehicle.
- the wheel is the left front wheel 12
- the second wheel is the right front wheel 14
- the third wheel is the left rear wheel 16
- the fourth wheel is the right rear wheel 18
- the present invention is not limited to this.
- the first wheel may be the left rear wheel 16
- the second wheel may be the right rear wheel 18
- the third wheel may be the left front wheel 12
- the fourth wheel may be the right front wheel 14.
- the brake mechanisms 24 and 26 of the left and right rear wheels 16 and 18 are controlled by two control units (first control unit and second control unit), and the brake mechanisms 20 and 22 of the left and right front wheels 12 and 14 are controlled. Are controlled by a single control unit (third control unit).
- the brake mechanisms 20, 22, 24, and 26 of the four wheels 12, 14, 16, and 18 are controlled by the three control units 28, 30, and 32 .
- four or more control units may be provided.
- the rear wheel control unit (first rear wheel control unit) 32 as a control unit for controlling the left and right rear wheel brake mechanisms 24, 26, a second rear wheel control is performed.
- a portion 33 is provided.
- the first front wheel control unit 28 fails, the braking force of the second front wheel control unit 30 is increased.
- the first and second rear wheel controls 32 and 33 temporarily reduce the braking force so as not to lock the rear, and then increase the braking force along the ideal braking force distribution.
- the case where the second front wheel control unit 30 fails is the same as the case where the first front wheel control unit 28 fails.
- the braking force of the second rear wheel control unit 33 is increased.
- the first and second front wheel controllers 28 and 30 also increase the braking force.
- the case where the second rear wheel control unit 33 fails is the same as the case where the first rear wheel control unit 32 fails.
- the first and second rear wheel control units 32 and 33 perform braking to such an extent that the rear lock does not occur.
- the braking force of the second front wheel control unit 30 and the second rear wheel control unit 33 is increased.
- the first front wheel control unit 28 and the second rear wheel control unit 33 fail, or when the second front wheel control unit 30 and the first rear wheel control unit 32 fail, the second The case where the front wheel control unit 30 and the second rear wheel control unit 33 fail is the same as the case where the first front wheel control unit 28 and the first rear wheel control unit 32 fail.
- the braking force of the first and second front wheel control units 28 and 30 is increased. As a result, stable braking can be performed even when the control unit has a double failure.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- General Engineering & Computer Science (AREA)
- Regulating Braking Force (AREA)
- Valves And Accessory Devices For Braking Systems (AREA)
- Braking Systems And Boosters (AREA)
Abstract
電動ブレーキ装置(10)は、左前輪用ブレーキ機構(20)および右前輪用ブレーキ機構(22)を制御する第1の前輪用制御部(28)と、同じく左前輪用ブレーキ機構(20)および右前輪用ブレーキ機構(22)を制御する第2の前輪用制御部(30)と、左後輪用ブレーキ機構(24)および右後輪用ブレーキ機構(26)を制御する後輪用制御部(32)と、の少なくとも3つの制御部を備える。3つの制御部(28),(30),(32)のうち少なくとも1つが故障した場合、故障していない他の制御部のうち少なくとも1つは、制御対象のブレーキ機構の制動力を一時的に低減させる。
Description
本発明は、車輪と共に回転する被摩擦部材と、電動アクチュエータによる動力により移動する摩擦部材とを備え、被摩擦部材に対して摩擦部材を押圧することにより制動力を得る電動ブレーキ装置に関する。
近年、従来から用いられている油圧式ブレーキに代えて、電動アクチュエータによってブレーキパッド等の摩擦部材をブレーキディスク等の被摩擦部材に押圧して制動力を得る電動ブレーキ装置の開発が進んでいる。
また、ブレーキ装置は車両における重要な機構であり、故障が生じた場合でも安全に停止できるような冗長化システムが採用されている。
また、ブレーキ装置は車両における重要な機構であり、故障が生じた場合でも安全に停止できるような冗長化システムが採用されている。
例えば、下記特許文献1には、車輪の回転を抑制するブレーキと、電源と、その電源から供給される電気エネルギーを制御することによってブレーキの作動状態を制御するブレーキ制御装置とを含む電気制御ブレーキシステムにおいて、電源とブレーキ制御装置との間に、ブレーキ操作部材の制動操作に伴って、切断状態から接続状態に切り換えられるスイッチ装置が設けられた電気制御ブレーキシステムにおいて、上記ブレーキ制御装置が、ブレーキ操作部材の操作に伴って作動させられる機械的ブレーキの作動をブレーキ操作部材に連携させる連携状態と、ブレーキ操作部材から分離する分離状態とに切り換え可能な切換装置と、その切換装置を、当該電気制御ブレーキシステムの異常時に、分離状態から連携状態に切り換える切換装置制御装置とを含んだものであることが開示されている。
上述した従来技術では、電気制御ブレーキシステムの故障時には機械的ブレーキを作動させて制動力を得ているが、電気制御ブレーキシステムの他に機械的ブレーキを設ける必要があり、車両のコストが増大するという課題がある。
また、上述した従来技術では、4つの車輪のブレーキ機構に対して4つの制御部が設けられているが、4つの車輪のブレーキ機構を3個以下の制御部で制御するシステムについては言及されておらず、改善の余地がある。
また、上述した従来技術では、4つの車輪のブレーキ機構に対して4つの制御部が設けられているが、4つの車輪のブレーキ機構を3個以下の制御部で制御するシステムについては言及されておらず、改善の余地がある。
本発明は、このような事情に鑑みなされたものであり、その目的は、電動ブレーキ装置の利便性を向上させることにある。
上述の目的を達成するため、請求項1の発明にかかる電動ブレーキ装置は、第1の車輪を制動する第1のブレーキ機構と、第2の車輪を制動する第2のブレーキ機構と、第3の車輪を制動する第3のブレーキ機構と、第4の車輪を制動する第4のブレーキ機構と、少なくとも3つの制御部と、を備える車両の電動ブレーキ装置であって、前記制御部は、それぞれ4つの前記ブレーキ機構のうち少なくともいずれか1つを制御し、前記3つの制御部のうち少なくとも1つが故障した場合、故障していない他の制御部のうち少なくとも1つは、制御対象のブレーキ機構の制動力を一時的に低減させる、ことを特徴とする。
請求項2の発明にかかる電動ブレーキ装置は、前記3つの制御部の少なくとも1つが故障した場合、前記故障していない他の制御部のうち1つは、制御対象のブレーキ機構の制動力を増加させ、前記故障していない他の制御部のうち他の1つは、制御対象のブレーキ機構の制動力を一時的に低減させた後、前記故障していない他の制御部うち1つによる前記制動力の増加と連動して前記制御対象のブレーキ機構の制動力を増加させる、ことを特徴とする。
請求項3の発明にかかる電動ブレーキ装置は、前記第1の車輪および前記第2の車輪は、前記車両の全幅方向に間隔を置いて配置され、前記第3の車輪および前記第4の車輪は、前記全幅方向に間隔を置いて配置されるとともに前記第1の車輪および前記第2の車輪から前記車両の全長方向に間隔を置いて配置され、前記3つの制御部は、前記第1の制御部、前記第2の制御部および前記第3の制御部であり、前記第1の制御部は、前記第1のブレーキ機構および前記第2のブレーキ機構を制御し、前記第2の制御部は、前記第1のブレーキ機構および前記第2のブレーキ機構を制御し、前記第3の制御部は、前記第3のブレーキ機構および前記第4のブレーキ機構を制御する、ことを特徴とする。
請求項4の発明にかかる電動ブレーキ装置は、前記第1のブレーキ機構および前記第2のブレーキ機構からなる第1のブレーキ対と、前記第3のブレーキ機構および前記第4のブレーキ機構からなる第2のブレーキ対との間には、前記車両の前記全長方向における理想制動力配分値が設定されており、前記故障していない他の制御部は、制御対象のブレーキ機構の制動力を一時的に前記理想制動力配分値よりも低い値とする、ことを特徴とする。
請求項5の発明にかかる電動ブレーキ装置は、それぞれの前記ブレーキ機構は、前記ブレーキ機構を制御および作動させる電源となるメインバッテリおよびバックアップバッテリに接続され、メインバッテリが故障した場合は前記ブレーキ機構への電源の供給元がバックアップバッテリに切り替えられる、ことを特徴とする。
請求項6の発明にかかる電動ブレーキ装置は、前記メインバッテリおよび前記バックアップバッテリは、前記車両の前輪を制動するブレーキ機構に対して優先して電源供給する、ことを特徴とする。
請求項7の発明にかかる電動ブレーキ装置は、前記第1の車輪は左前輪であり、前記第2の車輪は右前輪であり、前記第3の車輪は左後輪であり、前記第4の車輪は右後輪であり、前記第1のブレーキ機構は左前輪用ブレーキ機構であり、前記第2のブレーキ機構は右前輪用ブレーキ機構であり、前記第3のブレーキ機構は左後輪用ブレーキ機構であり、前記第4のブレーキ機構は右後輪用ブレーキ機構であり、前記3つの制御部は、前記第1の制御部、前記第2の制御部および前記第3の制御部であり、前記第1の制御部は第1の前輪用制御部であり、前記第2の制御部は第2の前輪用制御部であり、前記第3の制御部は後輪用制御部である、ことを特徴とする。
請求項8の発明にかかる電動ブレーキ装置は、前記第1の制御部または前記第2の制御部のうち少なくとも一方が故障した場合、前記第3の制御部は、前記左後輪用ブレーキ機構および前記右後輪用ブレーキ機構の制動力を一時的に低減させる、ことを特徴とする。
請求項2の発明にかかる電動ブレーキ装置は、前記3つの制御部の少なくとも1つが故障した場合、前記故障していない他の制御部のうち1つは、制御対象のブレーキ機構の制動力を増加させ、前記故障していない他の制御部のうち他の1つは、制御対象のブレーキ機構の制動力を一時的に低減させた後、前記故障していない他の制御部うち1つによる前記制動力の増加と連動して前記制御対象のブレーキ機構の制動力を増加させる、ことを特徴とする。
請求項3の発明にかかる電動ブレーキ装置は、前記第1の車輪および前記第2の車輪は、前記車両の全幅方向に間隔を置いて配置され、前記第3の車輪および前記第4の車輪は、前記全幅方向に間隔を置いて配置されるとともに前記第1の車輪および前記第2の車輪から前記車両の全長方向に間隔を置いて配置され、前記3つの制御部は、前記第1の制御部、前記第2の制御部および前記第3の制御部であり、前記第1の制御部は、前記第1のブレーキ機構および前記第2のブレーキ機構を制御し、前記第2の制御部は、前記第1のブレーキ機構および前記第2のブレーキ機構を制御し、前記第3の制御部は、前記第3のブレーキ機構および前記第4のブレーキ機構を制御する、ことを特徴とする。
請求項4の発明にかかる電動ブレーキ装置は、前記第1のブレーキ機構および前記第2のブレーキ機構からなる第1のブレーキ対と、前記第3のブレーキ機構および前記第4のブレーキ機構からなる第2のブレーキ対との間には、前記車両の前記全長方向における理想制動力配分値が設定されており、前記故障していない他の制御部は、制御対象のブレーキ機構の制動力を一時的に前記理想制動力配分値よりも低い値とする、ことを特徴とする。
請求項5の発明にかかる電動ブレーキ装置は、それぞれの前記ブレーキ機構は、前記ブレーキ機構を制御および作動させる電源となるメインバッテリおよびバックアップバッテリに接続され、メインバッテリが故障した場合は前記ブレーキ機構への電源の供給元がバックアップバッテリに切り替えられる、ことを特徴とする。
請求項6の発明にかかる電動ブレーキ装置は、前記メインバッテリおよび前記バックアップバッテリは、前記車両の前輪を制動するブレーキ機構に対して優先して電源供給する、ことを特徴とする。
請求項7の発明にかかる電動ブレーキ装置は、前記第1の車輪は左前輪であり、前記第2の車輪は右前輪であり、前記第3の車輪は左後輪であり、前記第4の車輪は右後輪であり、前記第1のブレーキ機構は左前輪用ブレーキ機構であり、前記第2のブレーキ機構は右前輪用ブレーキ機構であり、前記第3のブレーキ機構は左後輪用ブレーキ機構であり、前記第4のブレーキ機構は右後輪用ブレーキ機構であり、前記3つの制御部は、前記第1の制御部、前記第2の制御部および前記第3の制御部であり、前記第1の制御部は第1の前輪用制御部であり、前記第2の制御部は第2の前輪用制御部であり、前記第3の制御部は後輪用制御部である、ことを特徴とする。
請求項8の発明にかかる電動ブレーキ装置は、前記第1の制御部または前記第2の制御部のうち少なくとも一方が故障した場合、前記第3の制御部は、前記左後輪用ブレーキ機構および前記右後輪用ブレーキ機構の制動力を一時的に低減させる、ことを特徴とする。
請求項1の発明によれば、3つの制御部のうち少なくとも1つが故障した場合に、故障していない制御部のうち少なくとも1つが制動力を一時的に低減させるので、故障した制御部の制御対象のブレーキ機構の制動力が急激に下がった際に、車輪対間の制動力配分を適切な状態に保つ上で有利となる。
請求項2の発明によれば、1つの制御部が故障した際に、故障していない他の制御部のうち1つは制動力を増加させ、他の制御部のうち更に他の1つは制動力を一時的に低減させた後、他の制御部のうち1つによる制動力の増加に連動して制動力を増加させるので、車輪のロックを防止しつつ車両全体の制動力を確保する上で有利となる。
請求項3の発明によれば、2つの制御部で第1のブレーキ機構および第2のブレーキ機構を制御するので、第1のブレーキ機構および第2のブレーキ機構の可用性を高める上で有利となる。
請求項4の発明によれば、故障していない制御部は、車両に設定されている理想制動力配分値に基づいて制動力を低下させるので、制動中の車両姿勢を安定させる上で有利となる。
請求項5の発明によれば、ブレーキ機構に電力を供給するバッテリを2つ設けているので、メインバッテリが故障した場合でもサブバッテリによりブレーキ機構を作動させることができ、ブレーキ機構の冗長性を高める上で有利となる。
請求項6の発明によれば、メインバッテリおよびサブバッテリが前輪のブレーキ機構に対して優先的に電力を供給するので、車両の制動においてより重要性が高い前輪のブレーキ機構の冗長性を高める上で有利となる。
請求項7の発明によれば、左右の前輪用のブレーキ機構に対して2つの制御部を割り当てるとともに、後輪用のブレーキ機構には左右で1つの制御部を割り当てるので、仮に1つの制御部が故障した場合でも残りの前輪用ブレーキ機構は制御可能となり、制動時における重要度がより高い前輪ブレーキの冗長性を高める上で有利となる。
請求項8の発明によれば、前輪用ブレーキ機構を制御する制御部のうち少なくとも1つが故障した場合に、後輪用ブレーキ機構を制御する制御部が制動力を一時的に低減させるので、前輪用ブレーキ機構の制動力が急激に下がった際に、前後輪の制動力配分を適切な範囲に保つ上で有利となる。
請求項2の発明によれば、1つの制御部が故障した際に、故障していない他の制御部のうち1つは制動力を増加させ、他の制御部のうち更に他の1つは制動力を一時的に低減させた後、他の制御部のうち1つによる制動力の増加に連動して制動力を増加させるので、車輪のロックを防止しつつ車両全体の制動力を確保する上で有利となる。
請求項3の発明によれば、2つの制御部で第1のブレーキ機構および第2のブレーキ機構を制御するので、第1のブレーキ機構および第2のブレーキ機構の可用性を高める上で有利となる。
請求項4の発明によれば、故障していない制御部は、車両に設定されている理想制動力配分値に基づいて制動力を低下させるので、制動中の車両姿勢を安定させる上で有利となる。
請求項5の発明によれば、ブレーキ機構に電力を供給するバッテリを2つ設けているので、メインバッテリが故障した場合でもサブバッテリによりブレーキ機構を作動させることができ、ブレーキ機構の冗長性を高める上で有利となる。
請求項6の発明によれば、メインバッテリおよびサブバッテリが前輪のブレーキ機構に対して優先的に電力を供給するので、車両の制動においてより重要性が高い前輪のブレーキ機構の冗長性を高める上で有利となる。
請求項7の発明によれば、左右の前輪用のブレーキ機構に対して2つの制御部を割り当てるとともに、後輪用のブレーキ機構には左右で1つの制御部を割り当てるので、仮に1つの制御部が故障した場合でも残りの前輪用ブレーキ機構は制御可能となり、制動時における重要度がより高い前輪ブレーキの冗長性を高める上で有利となる。
請求項8の発明によれば、前輪用ブレーキ機構を制御する制御部のうち少なくとも1つが故障した場合に、後輪用ブレーキ機構を制御する制御部が制動力を一時的に低減させるので、前輪用ブレーキ機構の制動力が急激に下がった際に、前後輪の制動力配分を適切な範囲に保つ上で有利となる。
以下に添付図面を参照して、本発明にかかる電動ブレーキ装置の好適な実施の形態を詳細に説明する。
図1は、実施の形態にかかる電動ブレーキ装置10の構成を示す説明図である。
電動ブレーキ装置10は、前後左右の車輪12,14,16,18と、各車輪に設けられたブレーキ機構20,22,24,26,34,36と、制御部28,30,32,38,50と、操作部52,54とを含んで構成される。
なお、電動ブレーキ装置10には図1に示した構成に加えて、メインバッテリ40およびバックアップバッテリ42(図2参照)を有しているが、図1では図示を省略している。
図1は、実施の形態にかかる電動ブレーキ装置10の構成を示す説明図である。
電動ブレーキ装置10は、前後左右の車輪12,14,16,18と、各車輪に設けられたブレーキ機構20,22,24,26,34,36と、制御部28,30,32,38,50と、操作部52,54とを含んで構成される。
なお、電動ブレーキ装置10には図1に示した構成に加えて、メインバッテリ40およびバックアップバッテリ42(図2参照)を有しているが、図1では図示を省略している。
より詳細には、車輪12,14,16,18は、左前輪12、右前輪14、左後輪16、右後輪18であり、左前輪12に左前輪用ブレーキ機構20が、右前輪14に右前輪用ブレーキ機構22が、左後輪16に左後輪用ブレーキ機構24が、右後輪18に右後輪用ブレーキ機構26が、それぞれ設けられており、それぞれの車輪の制動を行う。
各ブレーキ機構20,22,24,26は常用ブレーキを実現するものであり、それぞれ制御部28,30,32が設けられている。
各制御部28,30,32は、各ブレーキ機構20,22,24,26のうち少なくとも1つを制御する。
本実施の形態では、左前輪用ブレーキ機構20および右前輪用ブレーキ機構22は、第1の前輪用制御部28および第2の前輪用制御部30によって、左後輪用ブレーキ機構24および右後輪用ブレーキ機構26は後輪用制御部32によって、それぞれ制御されるものとする。
すなわち、第1の制御部である第1の前輪用制御部28は、左前輪用ブレーキ機構20および右前輪用ブレーキ機構22を制御し、第2の制御部である第2の前輪用制御部30は、左前輪用ブレーキ機構20および右前輪用ブレーキ機構22を制御し、第3の制御部である第3の前輪用制御部32は、左後輪用ブレーキ機構24および右後輪用ブレーキ機構26を制御する。
また、パーキング用制御部38は、パーキングブレーキ機構34,36を制御する。
各ブレーキ機構20,22,24,26は常用ブレーキを実現するものであり、それぞれ制御部28,30,32が設けられている。
各制御部28,30,32は、各ブレーキ機構20,22,24,26のうち少なくとも1つを制御する。
本実施の形態では、左前輪用ブレーキ機構20および右前輪用ブレーキ機構22は、第1の前輪用制御部28および第2の前輪用制御部30によって、左後輪用ブレーキ機構24および右後輪用ブレーキ機構26は後輪用制御部32によって、それぞれ制御されるものとする。
すなわち、第1の制御部である第1の前輪用制御部28は、左前輪用ブレーキ機構20および右前輪用ブレーキ機構22を制御し、第2の制御部である第2の前輪用制御部30は、左前輪用ブレーキ機構20および右前輪用ブレーキ機構22を制御し、第3の制御部である第3の前輪用制御部32は、左後輪用ブレーキ機構24および右後輪用ブレーキ機構26を制御する。
また、パーキング用制御部38は、パーキングブレーキ機構34,36を制御する。
それぞれの制御部28,30,32,38は、車両の主制御を司る車両制御部50に接続されている。
車両制御部50は、ブレーキペダル(常用ブレーキ操作部)52およびパーキングブレーキ操作部54と接続されており、ブレーキペダル52またはパーキングブレーキ操作部54が操作された場合に、それぞれの制御部28,30,32,38に対してブレーキを作動させるよう指示する制御信号を出力する。
また、車両制御部50は、各制御部28,30,32,38の稼働状態を監視し、いずれかの制御部28,30,32,38に故障が生じた場合には、他の制御部に対して故障を示す制御信号を出力する。
なお、車両制御部50を介して制御部28,30,32,38の故障を報知するのでなく、各制御部28,30,32,38間を直接接続して、相互に稼働状態を監視してもよい。
車両制御部50は、ブレーキペダル(常用ブレーキ操作部)52およびパーキングブレーキ操作部54と接続されており、ブレーキペダル52またはパーキングブレーキ操作部54が操作された場合に、それぞれの制御部28,30,32,38に対してブレーキを作動させるよう指示する制御信号を出力する。
また、車両制御部50は、各制御部28,30,32,38の稼働状態を監視し、いずれかの制御部28,30,32,38に故障が生じた場合には、他の制御部に対して故障を示す制御信号を出力する。
なお、車両制御部50を介して制御部28,30,32,38の故障を報知するのでなく、各制御部28,30,32,38間を直接接続して、相互に稼働状態を監視してもよい。
各ブレーキ機構20,22,24,26は、車輪と共に回転する被摩擦部材と、電動アクチュエータによる動力により移動する摩擦部材とを備え、被摩擦部材に対して摩擦部材を押圧することにより制動力を得る電動ブレーキ機構(Electro-mechanical Brake:EMB)である。
より詳細には、各ブレーキ機構20,22,24,26は、車輪とともに回転するブレーキディスク(被摩擦部材)と、電動アクチュエータによってブレーキディスクへの押圧位置と非押圧位置との間を移動するブレーキパッド(摩擦部材)を有する電動キャリパと、をそれぞれ備える。
通常時(非ブレーキ時)には、ブレーキパッドはブレーキディスクから離れた非押圧位置に位置している。ブレーキ時には、制御部28,30,32が電動アクチュエータを動作させて、ブレーキパッドをブレーキディスクと当接する押圧位置に移動させ、車輪の運動エネルギーを熱エネルギーに変換することにより、車両を所望の車速まで減速させる。
より詳細には、各ブレーキ機構20,22,24,26は、車輪とともに回転するブレーキディスク(被摩擦部材)と、電動アクチュエータによってブレーキディスクへの押圧位置と非押圧位置との間を移動するブレーキパッド(摩擦部材)を有する電動キャリパと、をそれぞれ備える。
通常時(非ブレーキ時)には、ブレーキパッドはブレーキディスクから離れた非押圧位置に位置している。ブレーキ時には、制御部28,30,32が電動アクチュエータを動作させて、ブレーキパッドをブレーキディスクと当接する押圧位置に移動させ、車輪の運動エネルギーを熱エネルギーに変換することにより、車両を所望の車速まで減速させる。
図3は、制御部の概略構成例を示す説明図である。
本実施の形態では、制御部28,30,32はいずれも2つのブレーキ機構を制御しており、その構成は同一である。図3には第1の前輪用制御部28を図示する。
第1の前輪用制御部28は、デュアルマイクロコンピュータ(デュアルマイコン)2802、2つの集積回路(IC)2804,2806、2つのブリッジ(インバータ)回路2808,2810、電源レギュレータ2812を含んで構成される。電源レギュレータ2812とそれぞれのブリッジ回路2808,2810はバッテリ40に接続されている。
デュアルマイクロコンピュータ2802は、車両制御部50(図3に図示なし)と接続されており、車両制御部50からブレーキの作動指示が出力された場合には、ブリッジ回路2808,2810を駆動してバッテリ40の電力を三相交流に変換し、ブレーキ機構(図3では左前輪用ブレーキ機構20および右前輪用ブレーキ機構22)の電動アクチュエータ2002,2202に供給して電動アクチュエータ2002,2202を駆動させる。すなわち、第1の前輪用制御部28は、左前輪用ブレーキ機構20および右前輪用ブレーキ機構22の電源回路を含んでいる。
ブリッジ回路2808,2810の動作はそれぞれ独立して制御可能であるため、それぞれの電動アクチュエータ2002,2202(左前輪用ブレーキ機構20および右前輪用ブレーキ機構22)を独立して作動させることが可能となる。
上述のように、左前輪用ブレーキ機構20および右前輪用ブレーキ機構22は、第1の前輪用制御部28と第2の前輪用制御部30とによって制御されているが、通常時は左前輪用ブレーキ機構20および右前輪用ブレーキ機構22で必要とされる電力を、第1の前輪用制御部28と第2の前輪用制御部30とで半分ずつ供給する。
電動ブレーキ機構では電気信号によってブレーキ機構の動作を制御するので、状況に応じてブレーキ機構の動作を細かく制御できるとともに、油圧配管等が不要となり車両重量を大幅に軽量化することができる。
なお、図2に示すように、本実施の形態ではそれぞれのブレーキ機構20,22,24,26はメインバッテリ40およびバックアップバッテリ42に接続され、メインバッテリ40が故障した場合は各ブレーキ機構20,22,24,26への電源の供給元がバックアップバッテリ42に切り替えられるように構成されている。これにより、ブレーキ機構20,22,24,26の可用性を向上させることができる。
また、メインバッテリ40およびバックアップバッテリ42は、左右の前輪用ブレーキ機構20,22に対して優先的に電力を供給するように構成されている。
本実施の形態では、制御部28,30,32はいずれも2つのブレーキ機構を制御しており、その構成は同一である。図3には第1の前輪用制御部28を図示する。
第1の前輪用制御部28は、デュアルマイクロコンピュータ(デュアルマイコン)2802、2つの集積回路(IC)2804,2806、2つのブリッジ(インバータ)回路2808,2810、電源レギュレータ2812を含んで構成される。電源レギュレータ2812とそれぞれのブリッジ回路2808,2810はバッテリ40に接続されている。
デュアルマイクロコンピュータ2802は、車両制御部50(図3に図示なし)と接続されており、車両制御部50からブレーキの作動指示が出力された場合には、ブリッジ回路2808,2810を駆動してバッテリ40の電力を三相交流に変換し、ブレーキ機構(図3では左前輪用ブレーキ機構20および右前輪用ブレーキ機構22)の電動アクチュエータ2002,2202に供給して電動アクチュエータ2002,2202を駆動させる。すなわち、第1の前輪用制御部28は、左前輪用ブレーキ機構20および右前輪用ブレーキ機構22の電源回路を含んでいる。
ブリッジ回路2808,2810の動作はそれぞれ独立して制御可能であるため、それぞれの電動アクチュエータ2002,2202(左前輪用ブレーキ機構20および右前輪用ブレーキ機構22)を独立して作動させることが可能となる。
上述のように、左前輪用ブレーキ機構20および右前輪用ブレーキ機構22は、第1の前輪用制御部28と第2の前輪用制御部30とによって制御されているが、通常時は左前輪用ブレーキ機構20および右前輪用ブレーキ機構22で必要とされる電力を、第1の前輪用制御部28と第2の前輪用制御部30とで半分ずつ供給する。
電動ブレーキ機構では電気信号によってブレーキ機構の動作を制御するので、状況に応じてブレーキ機構の動作を細かく制御できるとともに、油圧配管等が不要となり車両重量を大幅に軽量化することができる。
なお、図2に示すように、本実施の形態ではそれぞれのブレーキ機構20,22,24,26はメインバッテリ40およびバックアップバッテリ42に接続され、メインバッテリ40が故障した場合は各ブレーキ機構20,22,24,26への電源の供給元がバックアップバッテリ42に切り替えられるように構成されている。これにより、ブレーキ機構20,22,24,26の可用性を向上させることができる。
また、メインバッテリ40およびバックアップバッテリ42は、左右の前輪用ブレーキ機構20,22に対して優先的に電力を供給するように構成されている。
図1の説明に戻り、左後輪16および右後輪18には、さらにパーキングブレーキ機構34,36がそれぞれ設けられている。パーキングブレーキ機構34,36は、主に駐車中に車両が移動するのを防止するために使用される。
パーキングブレーキ機構34,36はパーキング用制御部38によって制御される。
本実施の形態では、パーキングブレーキ機構34,36は電動パーキングブレーキ(Electric Parking Brake:EPB)であり、その構成には複数の形態がある。
パーキングブレーキ機構34,36はパーキング用制御部38によって制御される。
本実施の形態では、パーキングブレーキ機構34,36は電動パーキングブレーキ(Electric Parking Brake:EPB)であり、その構成には複数の形態がある。
図2は、電動ブレーキ装置10におけるパーキングブレーキの構成例を示す説明図である。
図2中、EMB20は左前輪用ブレーキ機構20に、EMB22は右前輪用ブレーキ機構22に、EMB24は左後輪用ブレーキ機構24に、EMB26は右後輪用ブレーキ機構26に、それぞれ対応する。
また、ECU28は第1の前輪用制御部28に、ECU30は第2の前輪用制御部30に、ECU32は後輪用制御部32に、それぞれ対応する。
また、EPB38はパーキング用制御部38に対応する。
図2中、EMB20は左前輪用ブレーキ機構20に、EMB22は右前輪用ブレーキ機構22に、EMB24は左後輪用ブレーキ機構24に、EMB26は右後輪用ブレーキ機構26に、それぞれ対応する。
また、ECU28は第1の前輪用制御部28に、ECU30は第2の前輪用制御部30に、ECU32は後輪用制御部32に、それぞれ対応する。
また、EPB38はパーキング用制御部38に対応する。
図2Aは、左後輪用ブレーキ機構24および右後輪用ブレーキ機構26が、パーキングブレーキ機構34,36を兼ねる構成となっている。
すなわち、パーキング用制御部38は、パーキングブレーキを作動時には左後輪用ブレーキ機構24および右後輪用ブレーキ機構26の電動アクチュエータを作動させ、ブレーキパッドをブレーキディスクへの押圧位置に移動させることによって左右の後輪16,18に制動力を付与する。
このような構成によれば、パーキング専用ブレーキ機構が不要になり、車両の軽量化を図ることができる。
すなわち、パーキング用制御部38は、パーキングブレーキを作動時には左後輪用ブレーキ機構24および右後輪用ブレーキ機構26の電動アクチュエータを作動させ、ブレーキパッドをブレーキディスクへの押圧位置に移動させることによって左右の後輪16,18に制動力を付与する。
このような構成によれば、パーキング専用ブレーキ機構が不要になり、車両の軽量化を図ることができる。
図2Bは、左後輪用ブレーキ機構24および右後輪用ブレーキ機構26のブレーキディスク内にブレーキドラムを配置したドラム・イン・ハット(DIH)方式によりパーキングブレーキ機構34,36を構成した例である。
すなわち、パーキングブレーキ機構34,36は、左後輪用ブレーキ機構24および右後輪用ブレーキ機構26のブレーキパッドの中央部に位置するハット部内にそれぞれ設けられ車輪とともに回転するブレーキドラムと、それぞれのブレーキドラム内に設けられパーキング用電動アクチュエータによってブレーキドラムへの押圧位置と非押圧位置との間を移動するブレーキシューと、を備える。
通常時(非パーキングブレーキ時)には、ブレーキシューはスプリングによってブレーキドラム内周方向へ付勢され、ブレーキドラムから離れた非押圧位置にある。また、ブレーキシューには、その一端をブレーキシューに対して揺動可能に取り付けられ、他端にワイヤーが取着されたブレーキシューレバーが取着されている。
パーキング用電動アクチュエータによりワイヤーを引っ張る(巻き取る)と、ブレーキシューレバーが揺動し、ブレーキシューがスプリングの付勢力に対抗してブレーキドラム外周方向に移動し、ブレーキドラムへの押圧位置に位置する。
このように、パーキング用制御部38は、パーキングブレーキの作動時にはパーキング用電動アクチュエータを作動させ、パーキングブレーキ機構34,36のブレーキシューをブレーキドラムへの押圧位置に移動させることによって左右の後輪16,18に制動力を付与する。
すなわち、パーキングブレーキ機構34,36は、左後輪用ブレーキ機構24および右後輪用ブレーキ機構26のブレーキパッドの中央部に位置するハット部内にそれぞれ設けられ車輪とともに回転するブレーキドラムと、それぞれのブレーキドラム内に設けられパーキング用電動アクチュエータによってブレーキドラムへの押圧位置と非押圧位置との間を移動するブレーキシューと、を備える。
通常時(非パーキングブレーキ時)には、ブレーキシューはスプリングによってブレーキドラム内周方向へ付勢され、ブレーキドラムから離れた非押圧位置にある。また、ブレーキシューには、その一端をブレーキシューに対して揺動可能に取り付けられ、他端にワイヤーが取着されたブレーキシューレバーが取着されている。
パーキング用電動アクチュエータによりワイヤーを引っ張る(巻き取る)と、ブレーキシューレバーが揺動し、ブレーキシューがスプリングの付勢力に対抗してブレーキドラム外周方向に移動し、ブレーキドラムへの押圧位置に位置する。
このように、パーキング用制御部38は、パーキングブレーキの作動時にはパーキング用電動アクチュエータを作動させ、パーキングブレーキ機構34,36のブレーキシューをブレーキドラムへの押圧位置に移動させることによって左右の後輪16,18に制動力を付与する。
図2Cは、左後輪用ブレーキ機構24および右後輪用ブレーキ機構26のブレーキディスク内にブレーキドラム型電動パーキングブレーキ機構34,36を構成した例である。
すなわち、パーキングブレーキ機構34,36は、左後輪用ブレーキ機構24および右後輪用ブレーキ機構26のブレーキパッドの中央部に位置するハット部内にそれぞれ設けられ車輪とともに回転するブレーキディスクと、それぞれのブレーキディスク内に設けられパーキング用電動アクチュエータによってブレーキディスクへの押圧位置と非押圧位置との間を移動するブレーキシューと、を備える。また、パーキング用制御部38は各パーキングブレーキ機構34,36と一体に構成される。
通常時(非パーキングブレーキ時)には、ブレーキシューはブレーキディスク内周方向へ付勢され、ブレーキディスクから離れた非押圧位置にある。また、ブレーキシューの一端とブレーキシューの一端の間に直動機構を有したモータが取り付けられている。
ドラム型パーキングのモータが回転すると直動機構を介し、ブレーキシューの一端を押す。ブレーキシューが押されるとブレーキディスク外周方向に移動し、ブレーキディスクへの押圧位置に位置する。
このように、パーキング用制御部38は、パーキングブレーキの作動時にはパーキング用電動アクチュエータを作動させ、パーキングブレーキ機構34,36のブレーキシューをブレーキドラムへの押圧位置に移動させることによって左右の後輪16,18に制動力を付与する。
すなわち、パーキングブレーキ機構34,36は、左後輪用ブレーキ機構24および右後輪用ブレーキ機構26のブレーキパッドの中央部に位置するハット部内にそれぞれ設けられ車輪とともに回転するブレーキディスクと、それぞれのブレーキディスク内に設けられパーキング用電動アクチュエータによってブレーキディスクへの押圧位置と非押圧位置との間を移動するブレーキシューと、を備える。また、パーキング用制御部38は各パーキングブレーキ機構34,36と一体に構成される。
通常時(非パーキングブレーキ時)には、ブレーキシューはブレーキディスク内周方向へ付勢され、ブレーキディスクから離れた非押圧位置にある。また、ブレーキシューの一端とブレーキシューの一端の間に直動機構を有したモータが取り付けられている。
ドラム型パーキングのモータが回転すると直動機構を介し、ブレーキシューの一端を押す。ブレーキシューが押されるとブレーキディスク外周方向に移動し、ブレーキディスクへの押圧位置に位置する。
このように、パーキング用制御部38は、パーキングブレーキの作動時にはパーキング用電動アクチュエータを作動させ、パーキングブレーキ機構34,36のブレーキシューをブレーキドラムへの押圧位置に移動させることによって左右の後輪16,18に制動力を付与する。
つづいて、電動ブレーキ装置10に不具合が生じた場合の制御について説明する。
一般に、4つの車輪12,14,16,18のうち3つの車輪が制動できなくなった場合(1つの車輪のみが制動可能な場合)、ブレーキ時にスピンが生じて車両が意図しない方向を向いてしまう可能性が高くなる。
電動ブレーキ装置10は、4つの車輪12,14,16,18に設けられた4つのブレーキ機構20,22,24,26を、3つの制御部28,30,32で制御しており、このうち2つの制御部が故障すると3つの車輪が制動できなくなり、上記スピンが発生する可能性が生じる。
このため、電動ブレーキ装置10では、左前輪、右前輪、左後輪および右後輪のうちいずれかの制動に不具合が生じた場合、特に3つの制御部28,30,32のうち、いずれか1つまたは2つが故障した場合でも、少なくとも2つの車輪は制動可能とし、車両の操舵性を確保するとともに、車両が停止するのに必要な制動力を確保している。
一般に、4つの車輪12,14,16,18のうち3つの車輪が制動できなくなった場合(1つの車輪のみが制動可能な場合)、ブレーキ時にスピンが生じて車両が意図しない方向を向いてしまう可能性が高くなる。
電動ブレーキ装置10は、4つの車輪12,14,16,18に設けられた4つのブレーキ機構20,22,24,26を、3つの制御部28,30,32で制御しており、このうち2つの制御部が故障すると3つの車輪が制動できなくなり、上記スピンが発生する可能性が生じる。
このため、電動ブレーキ装置10では、左前輪、右前輪、左後輪および右後輪のうちいずれかの制動に不具合が生じた場合、特に3つの制御部28,30,32のうち、いずれか1つまたは2つが故障した場合でも、少なくとも2つの車輪は制動可能とし、車両の操舵性を確保するとともに、車両が停止するのに必要な制動力を確保している。
なお、本実施の形態において制御部28,30,32の故障とは、ブレーキ機構20,22,24,26を作動できない状態であり、例えば電源回路の故障や信号線の断線等が挙げられる。
またこれ以外に、ブレーキ機構20,22,24,26の故障、例えば電動アクチュエータの故障やブレーキパッドの摩耗などにより車輪の制動に不具合が生じる場合がある。そのような場合にも以下に示す制御を適用可能である。
またこれ以外に、ブレーキ機構20,22,24,26の故障、例えば電動アクチュエータの故障やブレーキパッドの摩耗などにより車輪の制動に不具合が生じる場合がある。そのような場合にも以下に示す制御を適用可能である。
図4~図7は、制御部が故障した際の制動力の変化を示す説明図である。
なお、図4~図7において、ECU1は第1の前輪用制御部28に、ECU2は第2の前輪用制御部30に、ECU3は後輪用制御部32に、EPBはパーキング用制御部38に、それぞれ対応する。
以下の説明において、「制御部がブレーキ機構の制動力を増加させる(または低減する)」とは、例えば当該制御部からの供給電力を増加(または低減)させるなど、当該制御部からブレーキ機構に対する制御値の大きさを示すものであり、必ずしもブレーキ機構全体としての制動力を指すものではない。
すなわち、ブレーキ機構が複数の制御部により制御される場合には、1つの制御部がブレーキ機構の制動力を増加させた場合においても、他の制御部の故障などの要因によりブレーキ機構全体としては制動力が増加しない場合もある。
なお、図4~図7において、ECU1は第1の前輪用制御部28に、ECU2は第2の前輪用制御部30に、ECU3は後輪用制御部32に、EPBはパーキング用制御部38に、それぞれ対応する。
以下の説明において、「制御部がブレーキ機構の制動力を増加させる(または低減する)」とは、例えば当該制御部からの供給電力を増加(または低減)させるなど、当該制御部からブレーキ機構に対する制御値の大きさを示すものであり、必ずしもブレーキ機構全体としての制動力を指すものではない。
すなわち、ブレーキ機構が複数の制御部により制御される場合には、1つの制御部がブレーキ機構の制動力を増加させた場合においても、他の制御部の故障などの要因によりブレーキ機構全体としては制動力が増加しない場合もある。
まず、図4Aに示すように、前輪用制御部の一方(図4では第1の前輪用制御部28)が故障した場合について説明する。
図4Bに示すように、故障が生じていない初期時刻T0の段階では、第1の前輪用制御部28および第2の前輪用制御部30(ECU1,2)は、共に所定の制動力P1を発生するよう左右の前輪用ブレーキ機構20,22を駆動する。すなわち、左右の前輪用ブレーキ機構20,22は、合わせてP1×2の制動力を発生している。
また、後輪用制御部32(ECU3)は、所定の制動力P2(<P1)を発生するよう左右の後輪用ブレーキ機構24,26を駆動している。
3つの制御部28,30,32による合計の制動力はP3である。
図4Bに示すように、故障が生じていない初期時刻T0の段階では、第1の前輪用制御部28および第2の前輪用制御部30(ECU1,2)は、共に所定の制動力P1を発生するよう左右の前輪用ブレーキ機構20,22を駆動する。すなわち、左右の前輪用ブレーキ機構20,22は、合わせてP1×2の制動力を発生している。
また、後輪用制御部32(ECU3)は、所定の制動力P2(<P1)を発生するよう左右の後輪用ブレーキ機構24,26を駆動している。
3つの制御部28,30,32による合計の制動力はP3である。
時刻T1に第1の前輪用制御部28(ECU1)が故障すると、第1の前輪用制御部28から左右の前輪用ブレーキ機構20,22への電力供給がなくなり、第2の前輪用制御部30からの電力供給だけになる。よって、左右の前輪用ブレーキ機構20,22の合計の制動力はP1×1と半減する。
この場合、第2の前輪用制御部30(ECU2)は、左右の前輪用ブレーキ機構20,22への供給電力量を増加させて、左右の前輪用ブレーキ機構20,22がP1×1よりも大きい制動力P4を発生するようにする。
この場合、第2の前輪用制御部30(ECU2)は、左右の前輪用ブレーキ機構20,22への供給電力量を増加させて、左右の前輪用ブレーキ機構20,22がP1×1よりも大きい制動力P4を発生するようにする。
また、後輪用制御部32(ECU3)は、第1の前輪用制御部28の故障直後に左右の後輪用ブレーキ機構24,26への供給電力量を低減させて、左右の後輪用ブレーキ機構24,26の制動力P5(<P2)まで低減させる。
すなわち、3つの制御部28,30,32のうち少なくとも1つが故障した場合、故障していない他の制御部のうち少なくとも1つ(この場合後輪用制御部32)は、制御対象のブレーキ機構の制動力を一時的に低減させる。
これは、前輪用ブレーキ機構20,22の制動力が下がったことによって左右の後輪16,18がロックする(リヤロック)のを防止するためである。
その後、後輪用制御部32は、左右の前輪用ブレーキ機構20,22の制動力の増加に追従して、車両の理想制動力配分特性に沿って左右の後輪用ブレーキ機構24,26の制動力を増加させる。
すなわち、3つの制御部28,30,32のうち少なくとも1つが故障した場合、故障していない他の制御部のうち少なくとも1つ(この場合後輪用制御部32)は、制御対象のブレーキ機構の制動力を一時的に低減させる。
これは、前輪用ブレーキ機構20,22の制動力が下がったことによって左右の後輪16,18がロックする(リヤロック)のを防止するためである。
その後、後輪用制御部32は、左右の前輪用ブレーキ機構20,22の制動力の増加に追従して、車両の理想制動力配分特性に沿って左右の後輪用ブレーキ機構24,26の制動力を増加させる。
図8は、前後輪の理想制動力配分特性を示す説明図である。
図8において、縦軸は後輪に対する制動力配分、横軸は前輪に対する制動力配分を示す。
理想制動力配分とは、摩擦係数毎の理想制動力配分の各点を結んでいったものである。通常、電動ブレーキ装置10は、図8Aに示すような理想制動力配分特性に沿って前後輪に対する制動力、すなわち左右の前輪用ブレーキ機構20,22で発生する制動力と左右の後輪用ブレーキ機構24,26で発生する制動力とを分配している。
図8において、縦軸は後輪に対する制動力配分、横軸は前輪に対する制動力配分を示す。
理想制動力配分とは、摩擦係数毎の理想制動力配分の各点を結んでいったものである。通常、電動ブレーキ装置10は、図8Aに示すような理想制動力配分特性に沿って前後輪に対する制動力、すなわち左右の前輪用ブレーキ機構20,22で発生する制動力と左右の後輪用ブレーキ機構24,26で発生する制動力とを分配している。
ここで、図4の例のように第1の前輪用制御部28が故障すると、図8Bに示すように前輪用ブレーキ機構20,22の制動力が低下する。すなわち、P1×2であった制動力がP1×1となる。このままでは後輪用ブレーキ機構24,26の制動力が理想制動力配分値に対して大きいため、リヤロックが生じる。
このようなリヤロックを防止するため、図8Cに示すように、後輪用制御部32は、第1の前輪用制御部28の故障直後には左右の後輪用ブレーキ機構24,26の制動力を大きく低減させる。図8および図4の例では、理想制動力配分値よりも低いP5まで制動力を低減させている。
その後、第2の前輪用制御部30によって前輪用ブレーキ機構20,22の制動力がP4まで上昇した場合、後輪用制御部32は、後輪用ブレーキ機構24,26の理想制動力配分特性に沿った値であるP6に上昇させる。
また、ブレーキ操作が緩められた場合など、前輪用ブレーキ機構20,22の制動力が第1の前輪用制御部28の故障直後よりも低くなった場合にも、後輪用制御部32は、後輪用ブレーキ機構24,26の理想制動力配分特性に沿った値とする。
このようなリヤロックを防止するため、図8Cに示すように、後輪用制御部32は、第1の前輪用制御部28の故障直後には左右の後輪用ブレーキ機構24,26の制動力を大きく低減させる。図8および図4の例では、理想制動力配分値よりも低いP5まで制動力を低減させている。
その後、第2の前輪用制御部30によって前輪用ブレーキ機構20,22の制動力がP4まで上昇した場合、後輪用制御部32は、後輪用ブレーキ機構24,26の理想制動力配分特性に沿った値であるP6に上昇させる。
また、ブレーキ操作が緩められた場合など、前輪用ブレーキ機構20,22の制動力が第1の前輪用制御部28の故障直後よりも低くなった場合にも、後輪用制御部32は、後輪用ブレーキ機構24,26の理想制動力配分特性に沿った値とする。
言い換えると、3つの制御部28,30,32の少なくとも1つが故障した場合、故障していない他の制御部のうち1つは、制御対象のブレーキ機構の制動力を増加させ、故障していない他の制御部のうち他の1つは、制御対象のブレーキ機構の制動力を一時的に低減させた後、故障していない他の制御部うち1つによる制動力の増加と連動して制御対象のブレーキ機構の制動力を増加させる。
このとき、制動力を低減させる制御部は、制御対象のブレーキ機構の制動力を一時的に車両の全長方向(前後方向)における理想制動力配分値よりも低い値とする。
このとき、制動力を低減させる制御部は、制御対象のブレーキ機構の制動力を一時的に車両の全長方向(前後方向)における理想制動力配分値よりも低い値とする。
さらに、本実施の形態に沿って言い換えると、第1の前輪用制御部28または第2の前輪用制御部30の少なくとも一方が故障した場合、後輪用制御部32は、左後輪用ブレーキ機構24および右後輪用ブレーキ機構26の制動力を一時的に低減させる。このとき、後輪用制御部32は、左後輪用ブレーキ機構24および右後輪用ブレーキ機構26の制動力を、車両における前後輪の理想制動力配分値よりも低い値にする。
さらに詳細には、第1の前輪用制御部28または第2の前輪用制御部30のいずれか一方が故障した場合、第1の前輪用制御部28または第2の前輪用制御部30のうち他方は、左前輪用ブレーキ機構20および右前輪用ブレーキ機構22の制動力を増加させ、後輪用制御部32は、左後輪用ブレーキ機構24および右後輪用ブレーキ機構26の制動力を一時的に低減させた後、故障していない他方の制御部による左前輪用ブレーキ機構20および右前輪用ブレーキ機構22の制動力の増加と連動して左後輪用ブレーキ機構24および右後輪用ブレーキ機構26の制動力を増加させる。
なお、第2の前輪用制御部30が故障した場合については、上記の説明における第1の前輪用制御部28と第2の前輪用制御部30を、それぞれ読み替えればよい。
さらに詳細には、第1の前輪用制御部28または第2の前輪用制御部30のいずれか一方が故障した場合、第1の前輪用制御部28または第2の前輪用制御部30のうち他方は、左前輪用ブレーキ機構20および右前輪用ブレーキ機構22の制動力を増加させ、後輪用制御部32は、左後輪用ブレーキ機構24および右後輪用ブレーキ機構26の制動力を一時的に低減させた後、故障していない他方の制御部による左前輪用ブレーキ機構20および右前輪用ブレーキ機構22の制動力の増加と連動して左後輪用ブレーキ機構24および右後輪用ブレーキ機構26の制動力を増加させる。
なお、第2の前輪用制御部30が故障した場合については、上記の説明における第1の前輪用制御部28と第2の前輪用制御部30を、それぞれ読み替えればよい。
つぎに、図5Aに示すように、後輪用制御部32が故障した場合について説明する。
図5Bに示すように、故障が生じていない初期時刻T0の段階では、第1の前輪用制御部28および第2の前輪用制御部30(ECU1,2)は、共に所定の制動力P1を発生するよう左右の前輪用ブレーキ機構20,22を駆動する。すなわち、左右の前輪用ブレーキ機構20,22は、合わせてP1×2の制動力を発生している。
また、後輪用制御部32(ECU3)は、所定の制動力P2(<P1)を発生するよう左右の後輪用ブレーキ機構24,26を駆動している。
3つの制御部28,30,32による合計の制動力はP3である。
図5Bに示すように、故障が生じていない初期時刻T0の段階では、第1の前輪用制御部28および第2の前輪用制御部30(ECU1,2)は、共に所定の制動力P1を発生するよう左右の前輪用ブレーキ機構20,22を駆動する。すなわち、左右の前輪用ブレーキ機構20,22は、合わせてP1×2の制動力を発生している。
また、後輪用制御部32(ECU3)は、所定の制動力P2(<P1)を発生するよう左右の後輪用ブレーキ機構24,26を駆動している。
3つの制御部28,30,32による合計の制動力はP3である。
時刻T1に後輪用制御部32(ECU3)が故障すると、後輪用制御部32から左右の後輪用ブレーキ機構24,26への電力供給がなくなり、左右の後輪用ブレーキ機構24,26の制動力はゼロとなる。
この場合、第1の前輪用制御部28および第2の前輪用制御部30は、それぞれ左前輪用ブレーキ機構20および右前輪用ブレーキ機構22への供給電力を増加させて、合わせてP3(>P1)×2の制動力を発生させる。
また、パーキング用制御部38はパーキングブレーキ機構34,36を作動させて後輪16,18を制動する制動力を発生させる。
パーキングブレーキ機構34,36の制動力は、常用ブレーキである左後輪用ブレーキ機構24および右後輪用ブレーキ機構26よりも低いが、後輪16,18に対して一定の制動力を与えることができ、より高い制動力を得ることができる。
この場合、第1の前輪用制御部28および第2の前輪用制御部30は、それぞれ左前輪用ブレーキ機構20および右前輪用ブレーキ機構22への供給電力を増加させて、合わせてP3(>P1)×2の制動力を発生させる。
また、パーキング用制御部38はパーキングブレーキ機構34,36を作動させて後輪16,18を制動する制動力を発生させる。
パーキングブレーキ機構34,36の制動力は、常用ブレーキである左後輪用ブレーキ機構24および右後輪用ブレーキ機構26よりも低いが、後輪16,18に対して一定の制動力を与えることができ、より高い制動力を得ることができる。
言い換えると、後輪用制御部32が故障した場合、第1の前輪用制御部28および第2の前輪用制御部30は、左前輪用ブレーキ機構20および右前輪用ブレーキ機構22の制動力をそれぞれ増加させる。また、パーキング用制御部38は、パーキングブレーキ機構34,36を作動させて左後輪16および右後輪18に対する制動力を発生させる。
なお、図8に示すように理想制動力配分では前輪用ブレーキ機構の方が後輪用ブレーキ機構よりも強い制動力を出すように設定されている。このため、パーキングブレーキ機構34,36を作動させずに左前輪用ブレーキ機構20および右前輪用ブレーキ機構22のみで制動を行ってもよいが、パーキングブレーキ機構34,36を作動させて車両前後に制動力を与えることにより車両姿勢が安定するとともに、より高い制動力を得ることができるため効果的である。
なお、図8に示すように理想制動力配分では前輪用ブレーキ機構の方が後輪用ブレーキ機構よりも強い制動力を出すように設定されている。このため、パーキングブレーキ機構34,36を作動させずに左前輪用ブレーキ機構20および右前輪用ブレーキ機構22のみで制動を行ってもよいが、パーキングブレーキ機構34,36を作動させて車両前後に制動力を与えることにより車両姿勢が安定するとともに、より高い制動力を得ることができるため効果的である。
つぎに、図6Aに示すように、前輪用制御部の一方(第1の前輪用制御部28または第2の前輪用制御部30)と、後輪用制御部32が順次故障した場合について説明する。
図6Bでは、まず第1の前輪用制御部28(ECU1)が故障し、つぎに後輪用制御部32(ECU3)が故障した場合を例にして説明する。
図6Bに示すように、故障が生じていない初期時刻T0の段階では、第1の前輪用制御部28および第2の前輪用制御部30(ECU1,2)は、共に所定の制動力P1を発生するよう左右の前輪用ブレーキ機構20,22を駆動する。すなわち、左右の前輪用ブレーキ機構20,22は、合わせてP1×2の制動力を発生させている。
また、後輪用制御部32(ECU3)は、所定の制動力P2(<P1)を発生するよう左右の後輪用ブレーキ機構24,26を駆動している。
3つの制御部28,30,32による合計の制動力はP3である。
時刻T1に第1の前輪用制御部28(ECU1)が故障すると、第1の前輪用制御部28から左右の前輪用ブレーキ機構20,22への電力供給がなくなり、第2の前輪用制御部30からの電力供給だけになる。よって、左右の前輪用ブレーキ機構20,22の合計の制動力はP1×1と半減する。
この場合、第2の前輪用制御部30(ECU2)は、左右の前輪用ブレーキ機構20,22への供給電力量を増加させて、左右の前輪用ブレーキ機構20,22がP1×1よりも大きい制動力P4を発生するようにする。
図6Bでは、まず第1の前輪用制御部28(ECU1)が故障し、つぎに後輪用制御部32(ECU3)が故障した場合を例にして説明する。
図6Bに示すように、故障が生じていない初期時刻T0の段階では、第1の前輪用制御部28および第2の前輪用制御部30(ECU1,2)は、共に所定の制動力P1を発生するよう左右の前輪用ブレーキ機構20,22を駆動する。すなわち、左右の前輪用ブレーキ機構20,22は、合わせてP1×2の制動力を発生させている。
また、後輪用制御部32(ECU3)は、所定の制動力P2(<P1)を発生するよう左右の後輪用ブレーキ機構24,26を駆動している。
3つの制御部28,30,32による合計の制動力はP3である。
時刻T1に第1の前輪用制御部28(ECU1)が故障すると、第1の前輪用制御部28から左右の前輪用ブレーキ機構20,22への電力供給がなくなり、第2の前輪用制御部30からの電力供給だけになる。よって、左右の前輪用ブレーキ機構20,22の合計の制動力はP1×1と半減する。
この場合、第2の前輪用制御部30(ECU2)は、左右の前輪用ブレーキ機構20,22への供給電力量を増加させて、左右の前輪用ブレーキ機構20,22がP1×1よりも大きい制動力P4を発生するようにする。
また、後輪用制御部32(ECU3)は、第1の前輪用制御部28の故障直後に左右の後輪用ブレーキ機構24,26への供給電力量を低減させて、左右の後輪用ブレーキ機構24,26の制動力P5(<P2)まで一時的に低減させる。これは、上述のように前輪用ブレーキ機構20,22の制動力が下がったことによって左右の後輪16,18がロックする(リヤロック)のを防止するためである。
その後、後輪用制御部32は、左右の前輪用ブレーキ機構20,22の制動力の増加に追従して、車両の理想制動力配分特性に沿って左右の後輪用ブレーキ機構24,26の制動力をP6まで増加させる。
その後、後輪用制御部32は、左右の前輪用ブレーキ機構20,22の制動力の増加に追従して、車両の理想制動力配分特性に沿って左右の後輪用ブレーキ機構24,26の制動力をP6まで増加させる。
その後、時刻T2に後輪用制御部32(ECU3)が故障すると、後輪用制御部32から左右の後輪用ブレーキ機構24,26への電力供給がなくなり、左右の後輪用ブレーキ機構24,26の制動力はゼロとなる。
この場合、第2の前輪用制御部30は、左前輪用ブレーキ機構20および右前輪用ブレーキ機構22への供給電力をさらに増加させて、左右の前輪用ブレーキ機構20,22がP4よりも大きい制動力P7を発生するようにする。
また、パーキング用制御部38はパーキングブレーキ機構34,36を作動させて後輪16,18を制動する制動力を発生させる。パーキングブレーキ機構34,36の制動力は、常用ブレーキである左後輪用ブレーキ機構24および右後輪用ブレーキ機構26よりも低いが、後輪16,18に対して一定の制動力を与えることができる。
この場合、第2の前輪用制御部30は、左前輪用ブレーキ機構20および右前輪用ブレーキ機構22への供給電力をさらに増加させて、左右の前輪用ブレーキ機構20,22がP4よりも大きい制動力P7を発生するようにする。
また、パーキング用制御部38はパーキングブレーキ機構34,36を作動させて後輪16,18を制動する制動力を発生させる。パーキングブレーキ機構34,36の制動力は、常用ブレーキである左後輪用ブレーキ機構24および右後輪用ブレーキ機構26よりも低いが、後輪16,18に対して一定の制動力を与えることができる。
言い換えると、第1の前輪用制御部28または第2の前輪用制御部30のいずれか一方と、後輪用制御部32とが故障した場合、第1の前輪用制御部28または第2の前輪用制御部30のうち他方は左前輪用ブレーキ機構20および右前輪用ブレーキ機構22の制動力を増加させ、パーキング用制御部38は、パーキングブレーキ機構34,36を作動させて左後輪16および右後輪18に対する制動力を発生させる。
ここで、後輪用制御部32が先に故障し、次いで前輪用制御部の一方(第1の前輪用制御部28または第2の前輪用制御部30)が故障した場合について説明する。
この場合、図5Bに示すように後輪用制御部32が故障した時点で、第1の前輪用制御部28および第2の前輪用制御部30は、それぞれ左前輪用ブレーキ機構20および右前輪用ブレーキ機構22の制動力を増加させる。また、パーキング用制御部38はパーキングブレーキ機構34,36を作動させて後輪16,18を制動する。
その後、前輪用制御部の一方が故障した際には、故障していない側(他方)の前輪用制御部が、左右の前輪用ブレーキ機構20,22がさらに大きい制動力を発生するようにする。
すなわち、故障する順番が異なっても、最終的には図6と同じ状態になる。
この場合、図5Bに示すように後輪用制御部32が故障した時点で、第1の前輪用制御部28および第2の前輪用制御部30は、それぞれ左前輪用ブレーキ機構20および右前輪用ブレーキ機構22の制動力を増加させる。また、パーキング用制御部38はパーキングブレーキ機構34,36を作動させて後輪16,18を制動する。
その後、前輪用制御部の一方が故障した際には、故障していない側(他方)の前輪用制御部が、左右の前輪用ブレーキ機構20,22がさらに大きい制動力を発生するようにする。
すなわち、故障する順番が異なっても、最終的には図6と同じ状態になる。
つづいて、図7Aに示すように、前輪用制御部の両方(第1の前輪用制御部28および第2の前輪用制御部30)が順次故障した場合について説明する。
図7Bでは、まず第1の前輪用制御部28が故障し、つぎに第2の前輪用制御部30が故障した場合を例にして説明する。
図7Bに示すように、故障が生じていない初期時刻T0の段階では、第1の前輪用制御部28および第2の前輪用制御部30(ECU1,2)は、共に所定の制動力P1を発生するよう左右の前輪用ブレーキ機構20,22を駆動する。すなわち、左右の前輪用ブレーキ機構20,22は、合わせてP1×2の制動力を発生している。
また、後輪用制御部32(ECU3)は、所定の制動力P2(<P1)を発生するよう左右の後輪用ブレーキ機構24,26を駆動している。
3つの制御部28,30,32による合計の制動力はP3である。
図7Bでは、まず第1の前輪用制御部28が故障し、つぎに第2の前輪用制御部30が故障した場合を例にして説明する。
図7Bに示すように、故障が生じていない初期時刻T0の段階では、第1の前輪用制御部28および第2の前輪用制御部30(ECU1,2)は、共に所定の制動力P1を発生するよう左右の前輪用ブレーキ機構20,22を駆動する。すなわち、左右の前輪用ブレーキ機構20,22は、合わせてP1×2の制動力を発生している。
また、後輪用制御部32(ECU3)は、所定の制動力P2(<P1)を発生するよう左右の後輪用ブレーキ機構24,26を駆動している。
3つの制御部28,30,32による合計の制動力はP3である。
時刻T1に第1の前輪用制御部28(ECU1)が故障すると、第1の前輪用制御部28から左右の前輪用ブレーキ機構20,22への電力供給がなくなり、第2の前輪用制御部30からの電力供給だけになる。よって、左右の前輪用ブレーキ機構20,22の合計の制動力はP1×1と半減する。
この場合、第2の前輪用制御部30(ECU2)は、左右の前輪用ブレーキ機構20,22への供給電力量を増加させて、左右の前輪用ブレーキ機構20,22がP1×1よりも大きい制動力P4を発生するようにする。
この場合、第2の前輪用制御部30(ECU2)は、左右の前輪用ブレーキ機構20,22への供給電力量を増加させて、左右の前輪用ブレーキ機構20,22がP1×1よりも大きい制動力P4を発生するようにする。
また、後輪用制御部32(ECU3)は、第1の前輪用制御部28の故障直後に左右の後輪用ブレーキ機構24,26への供給電力量を一時的に低減させて、左右の後輪用ブレーキ機構24,26の制動力P5(<P2)まで低減させる。これは、上述のように前輪用ブレーキ機構20,22の制動力が下がったことによって左右の後輪16,18がロックする(リヤロック)のを防止するためである。
その後、後輪用制御部32は、左右の前輪用ブレーキ機構20,22の制動力の増加に追従して、車両の理想制動力配分特性に沿って左右の後輪用ブレーキ機構24,26の制動力をP6まで増加させる。
その後、後輪用制御部32は、左右の前輪用ブレーキ機構20,22の制動力の増加に追従して、車両の理想制動力配分特性に沿って左右の後輪用ブレーキ機構24,26の制動力をP6まで増加させる。
また、時刻T2に第2の前輪用制御部30(ECU2)が故障すると、左右の前輪用ブレーキ機構20,22に電力が供給されなくなり、左右の前輪用ブレーキ機構22,24の制動力がゼロとなる。
後輪用制御部32(ECU3)は、第2の前輪用制御部30の故障直後にも左右の後輪用ブレーキ機構24,26への供給電力量を低減させて、左右の後輪用ブレーキ機構24,26の制動力P7(<P6)まで低減させる。これは、前輪用ブレーキ機構20,22の制動力が急激にゼロになったことによるリヤロックを防止するためである。
その後、後輪用制御部32は、左右の後輪用ブレーキ機構24,26への供給電力を徐々に増加させ、リヤロックが生じない程度の制動力(図7ではP8)で車両を制動する。
後輪用制御部32(ECU3)は、第2の前輪用制御部30の故障直後にも左右の後輪用ブレーキ機構24,26への供給電力量を低減させて、左右の後輪用ブレーキ機構24,26の制動力P7(<P6)まで低減させる。これは、前輪用ブレーキ機構20,22の制動力が急激にゼロになったことによるリヤロックを防止するためである。
その後、後輪用制御部32は、左右の後輪用ブレーキ機構24,26への供給電力を徐々に増加させ、リヤロックが生じない程度の制動力(図7ではP8)で車両を制動する。
なお、第2の前輪用制御部30が先に故障し、次いで第1の前輪用制御部28が故障した場合については、上記の説明における第1の前輪用制御部28と第2の前輪用制御部30を、また、左前輪用ブレーキ機構20と右前輪用ブレーキ機構22を、それぞれ読み替えればよい。
なお、この他の故障の形態として、後輪用制御部32とパーキング用制御部38とが故障する場合が挙げられるが、この場合には第1の前輪用制御部28および第2の前輪用制御部30によって左右の前輪用ブレーキ機構20,22の制動力を増加させればよい。
以上説明したように、実施の形態にかかる電動ブレーキ装置10は、3つの制御部28,30,32のうち少なくとも1つが故障した場合に、故障していない制御部のうち少なくとも1つが制動力を一時的に低減させるので、故障した制御部の制御対象のブレーキ機構の制動力が急激に下がった際に、車輪対間の制動力配分を適切な状態に保つ上で有利となる。
また、電動ブレーキ装置10は、4つのブレーキ機構20,22,24,26を3つの制御部28,30,32で制御可能なので、電動ブレーキ装置10の部品点数を削減して車両コストを低減する上で有利となる。
また、電動ブレーキ装置10は、1つの制御部が故障した際に、故障していない他の制御部のうち1つは制動力を増加させ、故障していない他の制御部のうち更に他の1つは制動力を一時的に低減させた後、他の制御部のうち1つによる制動力の増加に連動して制動力を増加させるので、車輪のロックを防止しつつ車両全体の制動力を確保する上で有利となる。
また、電動ブレーキ装置10は、2つの制御部で第1のブレーキ機構および第2のブレーキ機構を制御するので、第1のブレーキ機構および第2のブレーキ機構の可用性を高める上で有利となる。
特に、電動ブレーキ装置10は、左右の前輪用ブレーキ機構20,22に対して2つの制御部28,30を割り当てるとともに、後輪用ブレーキ機構24,26には左右で1つの制御部32を割り当てるので、仮に1つの制御部が故障した場合でも残りの前輪用ブレーキ機構20,22は制御可能となり、制動時における重要度がより高い前輪ブレーキの冗長性を高める上で有利となる。
また、電動ブレーキ装置10は、故障していない制御部は、車両に設定されている理想制動力配分値に基づいて制動力を低下させるので、制動中の車両姿勢を安定させる上で有利となる。
特に、電動ブレーキ装置10は、第1の前輪用制御部28または第2の前輪用制御部30の少なくとも一方が故障した場合に、後輪用ブレーキ機構24,26の制動力を一時的に低減させるので、前輪用制御部の故障により前輪用ブレーキ機構20,22の制動力が急激に下がった際に、前後輪の制動力配分が理想制動力配分から外れることによりリヤロックが生じるのを防止する上で有利となる。
また、電動ブレーキ装置10は、前輪用制御部28,30の一方の故障時に後輪用ブレーキ機構24,26の制動力を一時的に低減させた後、前輪用制御部28,30の他方による前輪用ブレーキ機構20,22の制動力の増加に連動して後輪用ブレーキ機構24,26の制動力を増加させるので、リヤロックを防止しつつ車両全体の制動力を確保する上で有利となる。
また、電動ブレーキ装置10は、後輪用制御部32が故障した場合に、左前輪用ブレーキ機構20および右前輪用ブレーキ機構22の制動力をそれぞれ増加させるので、車両左右方向の制動力を均衡させつつ故障前に近い制動力を確保する上で有利となる。
また、電動ブレーキ装置10は、後輪用制御部32が故障した場合にパーキングブレーキ機構34,36を作動させて左後輪16および右後輪18に対する制動力を発生させるので、前後輪の制動力配分が極端に変化するのを防止して、より高い制動力を得ることができる。
また、電動ブレーキ装置10は、前輪用制御部28,30の一方と後輪用制御部32とが故障した場合に、前輪用制御部28,30によって前輪用ブレーキ機構20,22の制動力を増加させつつ、パーキングブレーキ機構34,36を作動させて左後輪16および右後輪18に対する制動力を発生させるので、前後輪の制動力配分が極端に変化するのを防止して、車両の走行姿勢を安定させる上で有利となるとともに、故障前に近い制動力を確保する上で有利となる。
また、電動ブレーキ装置10は、各ブレーキ機構20,22,24,26は、車輪と共に回転する被摩擦部材に対して、電動アクチュエータで摩擦部材を押圧することにより制動力を得るので、従来の油圧式ブレーキと比較してブレーキ操作への応答性を向上させる上で有利であるとともに、車両の状態に応じた様々なブレーキ制御を行う上で有利となる。
また、電動ブレーキ装置10は、被摩擦部材としてブレーキディスクを、摩擦部材としてブレーキパッドを用い、放熱性が高いディスクブレーキシステムを採っているので、ブレーキ機構の耐久性を向上させる上で有利となる。
また、電動ブレーキ装置10において、左後輪用ブレーキ機構24および右後輪用ブレーキ機構26がパーキングブレーキ機構34,36を兼ねるようにすれば、専用のパーキングブレーキ機構を設ける場合と比較して車両の軽量化および車両構成の簡素化を図る上で有利となる。
また、電動ブレーキ装置10において、ブレーキディスクの中央部にドラムブレーキシステムを設けてパーキングブレーキ機構34,36を構成するようにすれば、左後輪用ブレーキ機構24および右後輪用ブレーキ機構26がパーキングブレーキ機構34,36を兼ねる場合と比較して各ブレーキ機構の負荷を軽減する上で有利となる。
また、電動ブレーキ装置10は、ブレーキ機構20,22,24,26に電力を供給するバッテリを2つ設けているので、メインバッテリ40が故障した場合でもサブバッテリ42によりブレーキ機構20,22,24,26を作動させることができ、ブレーキ機構20,22,24,26の冗長性を高める上で有利となる。
また、電動ブレーキ装置10は、4つのブレーキ機構20,22,24,26を3つの制御部28,30,32で制御可能なので、電動ブレーキ装置10の部品点数を削減して車両コストを低減する上で有利となる。
また、電動ブレーキ装置10は、1つの制御部が故障した際に、故障していない他の制御部のうち1つは制動力を増加させ、故障していない他の制御部のうち更に他の1つは制動力を一時的に低減させた後、他の制御部のうち1つによる制動力の増加に連動して制動力を増加させるので、車輪のロックを防止しつつ車両全体の制動力を確保する上で有利となる。
また、電動ブレーキ装置10は、2つの制御部で第1のブレーキ機構および第2のブレーキ機構を制御するので、第1のブレーキ機構および第2のブレーキ機構の可用性を高める上で有利となる。
特に、電動ブレーキ装置10は、左右の前輪用ブレーキ機構20,22に対して2つの制御部28,30を割り当てるとともに、後輪用ブレーキ機構24,26には左右で1つの制御部32を割り当てるので、仮に1つの制御部が故障した場合でも残りの前輪用ブレーキ機構20,22は制御可能となり、制動時における重要度がより高い前輪ブレーキの冗長性を高める上で有利となる。
また、電動ブレーキ装置10は、故障していない制御部は、車両に設定されている理想制動力配分値に基づいて制動力を低下させるので、制動中の車両姿勢を安定させる上で有利となる。
特に、電動ブレーキ装置10は、第1の前輪用制御部28または第2の前輪用制御部30の少なくとも一方が故障した場合に、後輪用ブレーキ機構24,26の制動力を一時的に低減させるので、前輪用制御部の故障により前輪用ブレーキ機構20,22の制動力が急激に下がった際に、前後輪の制動力配分が理想制動力配分から外れることによりリヤロックが生じるのを防止する上で有利となる。
また、電動ブレーキ装置10は、前輪用制御部28,30の一方の故障時に後輪用ブレーキ機構24,26の制動力を一時的に低減させた後、前輪用制御部28,30の他方による前輪用ブレーキ機構20,22の制動力の増加に連動して後輪用ブレーキ機構24,26の制動力を増加させるので、リヤロックを防止しつつ車両全体の制動力を確保する上で有利となる。
また、電動ブレーキ装置10は、後輪用制御部32が故障した場合に、左前輪用ブレーキ機構20および右前輪用ブレーキ機構22の制動力をそれぞれ増加させるので、車両左右方向の制動力を均衡させつつ故障前に近い制動力を確保する上で有利となる。
また、電動ブレーキ装置10は、後輪用制御部32が故障した場合にパーキングブレーキ機構34,36を作動させて左後輪16および右後輪18に対する制動力を発生させるので、前後輪の制動力配分が極端に変化するのを防止して、より高い制動力を得ることができる。
また、電動ブレーキ装置10は、前輪用制御部28,30の一方と後輪用制御部32とが故障した場合に、前輪用制御部28,30によって前輪用ブレーキ機構20,22の制動力を増加させつつ、パーキングブレーキ機構34,36を作動させて左後輪16および右後輪18に対する制動力を発生させるので、前後輪の制動力配分が極端に変化するのを防止して、車両の走行姿勢を安定させる上で有利となるとともに、故障前に近い制動力を確保する上で有利となる。
また、電動ブレーキ装置10は、各ブレーキ機構20,22,24,26は、車輪と共に回転する被摩擦部材に対して、電動アクチュエータで摩擦部材を押圧することにより制動力を得るので、従来の油圧式ブレーキと比較してブレーキ操作への応答性を向上させる上で有利であるとともに、車両の状態に応じた様々なブレーキ制御を行う上で有利となる。
また、電動ブレーキ装置10は、被摩擦部材としてブレーキディスクを、摩擦部材としてブレーキパッドを用い、放熱性が高いディスクブレーキシステムを採っているので、ブレーキ機構の耐久性を向上させる上で有利となる。
また、電動ブレーキ装置10において、左後輪用ブレーキ機構24および右後輪用ブレーキ機構26がパーキングブレーキ機構34,36を兼ねるようにすれば、専用のパーキングブレーキ機構を設ける場合と比較して車両の軽量化および車両構成の簡素化を図る上で有利となる。
また、電動ブレーキ装置10において、ブレーキディスクの中央部にドラムブレーキシステムを設けてパーキングブレーキ機構34,36を構成するようにすれば、左後輪用ブレーキ機構24および右後輪用ブレーキ機構26がパーキングブレーキ機構34,36を兼ねる場合と比較して各ブレーキ機構の負荷を軽減する上で有利となる。
また、電動ブレーキ装置10は、ブレーキ機構20,22,24,26に電力を供給するバッテリを2つ設けているので、メインバッテリ40が故障した場合でもサブバッテリ42によりブレーキ機構20,22,24,26を作動させることができ、ブレーキ機構20,22,24,26の冗長性を高める上で有利となる。
なお、本実施の形態では、車両の4輪が、車両の全幅方向に間隔を置いて配置される第1の車輪および第2の車輪からなる第1の車輪対と、全幅方向に間隔を置いて配置される第3の車輪および第4の車輪からなり第1の車輪対から前記車両の全長方向に間隔を置いて配置される第2の車輪対と、からなるとした場合に、第1の車輪は左前輪12であり、第2の車輪は右前輪14であり、第3の車輪は左後輪16であり、第4の車輪は右後輪18であるものとしたが、これに限らず、例えば第1の車輪を左後輪16とし、第2の車輪を右後輪18とし、第3の車輪を左前輪12とし、第4の車輪を右前輪14としてもよい。
この場合、左右の後輪16,18のブレーキ機構24,26が2つの制御部(第1の制御部、第2の制御部)により制御され、左右の前輪12,14のブレーキ機構20,22が単一の制御部(第3の制御部)により制御されることとなる。
この場合、左右の後輪16,18のブレーキ機構24,26が2つの制御部(第1の制御部、第2の制御部)により制御され、左右の前輪12,14のブレーキ機構20,22が単一の制御部(第3の制御部)により制御されることとなる。
また、本実施の形態では、4つの車輪12,14,16,18のブレーキ機構20,22,24,26を3つの制御部28,30,32で制御する場合について説明したが、図9に示すように4つ以上の制御部を設けてもよい。
図9の例では、左右の後輪用ブレーキ機構24,26を制御する制御部として、後輪用制御部(第1の後輪用制御部)32に加えて、第2の後輪用制御部33を設けている。
この場合、第1の前輪用制御部28が故障した場合には、第2の前輪用制御部30の制動力を上昇させる。その際、第1および第2の後輪用制御32,33はリヤロックしないように一時的に制動力を低下させ、その後理想制動力配分に沿って制動力を上昇させる。
第2の前輪用制御部30が故障した場合も、第1の前輪用制御部28が故障した場合と同様である。
第1の後輪用制御部32が故障した場合には、第2の後輪用制御部33の制動力を上昇させる。また、第1および第2の前輪用制御部28,30もそれぞれ制動力を上昇させる。
第2の後輪用制御部33が故障した場合も、第1の後輪用制御部32が故障した場合と同様である。
図9の例では、左右の後輪用ブレーキ機構24,26を制御する制御部として、後輪用制御部(第1の後輪用制御部)32に加えて、第2の後輪用制御部33を設けている。
この場合、第1の前輪用制御部28が故障した場合には、第2の前輪用制御部30の制動力を上昇させる。その際、第1および第2の後輪用制御32,33はリヤロックしないように一時的に制動力を低下させ、その後理想制動力配分に沿って制動力を上昇させる。
第2の前輪用制御部30が故障した場合も、第1の前輪用制御部28が故障した場合と同様である。
第1の後輪用制御部32が故障した場合には、第2の後輪用制御部33の制動力を上昇させる。また、第1および第2の前輪用制御部28,30もそれぞれ制動力を上昇させる。
第2の後輪用制御部33が故障した場合も、第1の後輪用制御部32が故障した場合と同様である。
また、第1および第2の前輪用制御部28,30が故障した場合には、第1および第2の後輪用制御部32,33によってリヤロックしない程度に制動を行う。
第1の前輪用制御部28と第1の後輪用制御部32が故障した場合には、第2の前輪用制御部30と第2の後輪用制御部33の制動力を上昇させる。
第1の前輪用制御部28と第2の後輪用制御部33が故障した場合や、第2の前輪用制御部30と第1の後輪用制御部32が故障した場合、第2の前輪用制御部30と第2の後輪用制御部33が故障した場合も、第1の前輪用制御部28と第1の後輪用制御部32が故障した場合と同様である。
第1のおよび第2の後輪用制御部32と33が故障した場合には、第1および第2の前輪用制御部28,30の制動力を上昇させる。
これにより、制御部が二重故障した場合でも安定した制動を実施することができる。
第1の前輪用制御部28と第1の後輪用制御部32が故障した場合には、第2の前輪用制御部30と第2の後輪用制御部33の制動力を上昇させる。
第1の前輪用制御部28と第2の後輪用制御部33が故障した場合や、第2の前輪用制御部30と第1の後輪用制御部32が故障した場合、第2の前輪用制御部30と第2の後輪用制御部33が故障した場合も、第1の前輪用制御部28と第1の後輪用制御部32が故障した場合と同様である。
第1のおよび第2の後輪用制御部32と33が故障した場合には、第1および第2の前輪用制御部28,30の制動力を上昇させる。
これにより、制御部が二重故障した場合でも安定した制動を実施することができる。
10……電動ブレーキ装置、12……左前輪、14……右前輪、16……左後輪、18……右後輪、20……左前輪用ブレーキ機構、22……右前輪用ブレーキ機構、24……左後輪用ブレーキ機構、26……右後輪用ブレーキ機構、28……第1の前輪用制御部、30……第2の前輪用制御部、32……後輪用制御部、34,36……パーキングブレーキ機構、38……パーキング用制御部、40……メインバッテリ、42……バックアップバッテリ、50……車両制御部、52……ブレーキペダル、54……パーキングブレーキ操作部。
Claims (8)
- 第1の車輪を制動する第1のブレーキ機構と、第2の車輪を制動する第2のブレーキ機構と、第3の車輪を制動する第3のブレーキ機構と、第4の車輪を制動する第4のブレーキ機構と、少なくとも3つの制御部と、を備える車両の電動ブレーキ装置であって、
前記制御部は、それぞれ4つの前記ブレーキ機構のうち少なくともいずれか1つを制御し、
前記3つの制御部のうち少なくとも1つが故障した場合、故障していない他の制御部のうち少なくとも1つは、制御対象のブレーキ機構の制動力を一時的に低減させる、
ことを特徴とする電動ブレーキ装置。 - 前記3つの制御部の少なくとも1つが故障した場合、前記故障していない他の制御部のうち1つは、制御対象のブレーキ機構の制動力を増加させ、前記故障していない他の制御部のうち他の1つは、制御対象のブレーキ機構の制動力を一時的に低減させた後、前記故障していない他の制御部うち1つによる前記制動力の増加と連動して前記制御対象のブレーキ機構の制動力を増加させる、
ことを特徴とする請求項1記載の電動ブレーキ装置。 - 前記第1の車輪および前記第2の車輪は、前記車両の全幅方向に間隔を置いて配置され、前記第3の車輪および前記第4の車輪は、前記全幅方向に間隔を置いて配置されるとともに前記第1の車輪および前記第2の車輪から前記車両の全長方向に間隔を置いて配置され、
前記3つの制御部は、前記第1の制御部、前記第2の制御部および前記第3の制御部であり、
前記第1の制御部は、前記第1のブレーキ機構および前記第2のブレーキ機構を制御し、
前記第2の制御部は、前記第1のブレーキ機構および前記第2のブレーキ機構を制御し、
前記第3の制御部は、前記第3のブレーキ機構および前記第4のブレーキ機構を制御する、
ことを特徴とする請求項1または2記載の電動ブレーキ装置。 - 前記第1のブレーキ機構および前記第2のブレーキ機構からなる第1のブレーキ対と、前記第3のブレーキ機構および前記第4のブレーキ機構からなる第2のブレーキ対との間には、前記車両の前記全長方向における理想制動力配分値が設定されており、
前記故障していない他の制御部は、制御対象のブレーキ機構の制動力を一時的に前記理想制動力配分値よりも低い値とする、
ことを特徴とする請求項3記載の電動ブレーキ装置。 - それぞれの前記ブレーキ機構は、前記ブレーキ機構を制御および作動させる電源となるメインバッテリおよびバックアップバッテリに接続され、メインバッテリが故障した場合は前記ブレーキ機構への電源の供給元がバックアップバッテリに切り替えられる、
ことを特徴とする請求項1から4のいずれか1項記載の電動ブレーキ装置。 - 前記メインバッテリおよび前記バックアップバッテリは、前記車両の前輪を制動するブレーキ機構に対して優先して電源供給する、
ことを特徴とする請求項5のバッテリシステム。 - 前記第1の車輪は左前輪であり、前記第2の車輪は右前輪であり、前記第3の車輪は左後輪であり、前記第4の車輪は右後輪であり、
前記第1のブレーキ機構は左前輪用ブレーキ機構であり、前記第2のブレーキ機構は右前輪用ブレーキ機構であり、前記第3のブレーキ機構は左後輪用ブレーキ機構であり、前記第4のブレーキ機構は右後輪用ブレーキ機構であり、
前記3つの制御部は、前記第1の制御部、前記第2の制御部および前記第3の制御部であり、
前記第1の制御部は第1の前輪用制御部であり、前記第2の制御部は第2の前輪用制御部であり、前記第3の制御部は後輪用制御部である、
ことを特徴とする請求項1から6のいずれか1項記載の電動ブレーキ装置。 - 前記第1の制御部または前記第2の制御部のうち少なくとも一方が故障した場合、前記第3の制御部は、前記左後輪用ブレーキ機構および前記右後輪用ブレーキ機構の制動力を一時的に低減させる、
ことを特徴とする請求項7記載の電動ブレーキ装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP16817562.8A EP3318459B1 (en) | 2015-07-02 | 2016-05-10 | Electromechanical brake device |
| US15/515,454 US10407033B2 (en) | 2015-07-02 | 2016-05-10 | Electric brake device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015133304A JP6589416B2 (ja) | 2015-07-02 | 2015-07-02 | 電動ブレーキ装置 |
| JP2015-133304 | 2015-07-02 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017002453A1 true WO2017002453A1 (ja) | 2017-01-05 |
Family
ID=57608574
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/063811 WO2017002453A1 (ja) | 2015-07-02 | 2016-05-10 | 電動ブレーキ装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10407033B2 (ja) |
| EP (1) | EP3318459B1 (ja) |
| JP (1) | JP6589416B2 (ja) |
| WO (1) | WO2017002453A1 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102556617B1 (ko) * | 2016-09-05 | 2023-07-19 | 에이치엘만도 주식회사 | 전자제어식 브레이크 시스템 및 그 제어방법 |
| IT201700105896A1 (it) * | 2017-09-21 | 2019-03-21 | Freni Brembo Spa | Impianto frenante per veicoli di tipo brake by wire munito di azionamento elettrico e di back-up elettrico |
| JP7172352B2 (ja) * | 2018-09-24 | 2022-11-16 | 株式会社アドヴィックス | 制動制御装置 |
| DE102019207517A1 (de) | 2019-05-22 | 2020-11-26 | Volkswagen Aktiengesellschaft | Bremssteuersystem |
| KR20220106806A (ko) * | 2019-12-10 | 2022-07-29 | 볼보 트럭 코퍼레이션 | 이중화 제동 장치 시스템 제어 |
| WO2021115564A1 (en) | 2019-12-10 | 2021-06-17 | Volvo Truck Corporation | A redundant brake device system |
| EP3835148B1 (en) | 2019-12-13 | 2022-09-21 | KNORR-BREMSE Systeme für Nutzfahrzeuge GmbH | System and method for automatically stopping an autonomous vehicle |
| WO2022010034A1 (ko) * | 2020-07-10 | 2022-01-13 | 엘지전자 주식회사 | 브레이크 제어 장치와 이를 포함하는 로봇 |
| KR20220053716A (ko) * | 2020-10-22 | 2022-05-02 | 현대모비스 주식회사 | 전동식 브레이크 장치 및 제어방법 |
| JP6936380B1 (ja) | 2020-12-28 | 2021-09-15 | 本田技研工業株式会社 | 車両制御システム、および車両制御方法 |
| KR20220102001A (ko) | 2021-01-12 | 2022-07-19 | 현대모비스 주식회사 | 전동식 브레이크의 제어장치 및 방법 |
| JP2023019693A (ja) * | 2021-07-29 | 2023-02-09 | 株式会社アドヴィックス | 車両の制動制御装置 |
| US20240075817A1 (en) * | 2022-09-07 | 2024-03-07 | Harbinger Motors Inc. | Commercial electric vehicle braking systems |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000016258A (ja) * | 1998-06-26 | 2000-01-18 | Toyota Motor Corp | 車両用電動ブレーキ装置 |
| WO2012121199A1 (ja) * | 2011-03-07 | 2012-09-13 | Ntn株式会社 | 電気自動車 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000225935A (ja) * | 1999-02-03 | 2000-08-15 | Toyota Motor Corp | 電気制御ブレーキシステム |
| JP4723706B2 (ja) * | 1999-09-02 | 2011-07-13 | トヨタ自動車株式会社 | 車両用電気制御システム |
| DE102006059919A1 (de) * | 2006-12-19 | 2008-07-03 | Robert Bosch Gmbh | Datenverarbeitungssystem für ein Kraftfahreug |
| KR101228492B1 (ko) * | 2010-06-28 | 2013-01-31 | 현대모비스 주식회사 | 차량의 제동 제어시스템 및 제동 제어방법 |
-
2015
- 2015-07-02 JP JP2015133304A patent/JP6589416B2/ja active Active
-
2016
- 2016-05-10 US US15/515,454 patent/US10407033B2/en active Active
- 2016-05-10 EP EP16817562.8A patent/EP3318459B1/en active Active
- 2016-05-10 WO PCT/JP2016/063811 patent/WO2017002453A1/ja active Application Filing
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000016258A (ja) * | 1998-06-26 | 2000-01-18 | Toyota Motor Corp | 車両用電動ブレーキ装置 |
| WO2012121199A1 (ja) * | 2011-03-07 | 2012-09-13 | Ntn株式会社 | 電気自動車 |
Also Published As
| Publication number | Publication date |
|---|---|
| US10407033B2 (en) | 2019-09-10 |
| EP3318459A1 (en) | 2018-05-09 |
| EP3318459B1 (en) | 2021-04-14 |
| US20170210361A1 (en) | 2017-07-27 |
| JP6589416B2 (ja) | 2019-10-16 |
| EP3318459A4 (en) | 2019-05-01 |
| JP2017013669A (ja) | 2017-01-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2017002453A1 (ja) | 電動ブレーキ装置 | |
| JP6565388B2 (ja) | 電動ブレーキ装置 | |
| JP6575175B2 (ja) | 電動ブレーキ装置 | |
| KR101228492B1 (ko) | 차량의 제동 제어시스템 및 제동 제어방법 | |
| JP2000225935A5 (ja) | ||
| WO2016178428A1 (ja) | 電動ブレーキシステム | |
| US8733847B2 (en) | Asymmetrical electric braking architecture for aircraft | |
| JP7230009B2 (ja) | 電気作動および電気的バックアップを設けられた車両用ブレーキ・バイ・ワイヤ制動システム | |
| JP6066082B2 (ja) | 緊急時の車両の複数のアクチュエータを駆動制御するための方法及び制御ユニット | |
| EP3623242B1 (en) | A system and a method for controlling an electric vehicle | |
| CN112739593B (zh) | 汽车的驻车制动系统、汽车及其控制方法 | |
| WO2020235630A1 (ja) | 制動制御装置 | |
| JP7239709B2 (ja) | 車両の電動制動および電動操舵のための制御アーキテクチャおよび当該制御アーキテクチャの制御方法 | |
| JP2023522306A (ja) | 電気ブレーキシステム故障運用 | |
| US20240278760A1 (en) | Braking system for a vehicle and method for braking a vehicle | |
| US12122250B2 (en) | System and a method for controlling an electric vehicle | |
| CN118722549A (zh) | Emb驻车系统的主副控制器冗余架构及冗余控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16817562 Country of ref document: EP Kind code of ref document: A1 |
|
| REEP | Request for entry into the european phase |
Ref document number: 2016817562 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15515454 Country of ref document: US Ref document number: 2016817562 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |