WO2016171132A1 - 組織押し込み具 - Google Patents
組織押し込み具 Download PDFInfo
- Publication number
- WO2016171132A1 WO2016171132A1 PCT/JP2016/062388 JP2016062388W WO2016171132A1 WO 2016171132 A1 WO2016171132 A1 WO 2016171132A1 JP 2016062388 W JP2016062388 W JP 2016062388W WO 2016171132 A1 WO2016171132 A1 WO 2016171132A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- tissue
- pushing
- shaft
- pushing tool
- pusher
- Prior art date
Links
- 238000005452 bending Methods 0.000 claims description 30
- 239000000463 material Substances 0.000 claims description 13
- 230000003902 lesion Effects 0.000 abstract description 5
- 210000001519 tissue Anatomy 0.000 description 215
- 238000000034 method Methods 0.000 description 46
- 230000003872 anastomosis Effects 0.000 description 31
- 230000004048 modification Effects 0.000 description 21
- 238000012986 modification Methods 0.000 description 21
- 210000000683 abdominal cavity Anatomy 0.000 description 14
- 210000002429 large intestine Anatomy 0.000 description 12
- 238000010586 diagram Methods 0.000 description 11
- 238000002271 resection Methods 0.000 description 10
- 210000000056 organ Anatomy 0.000 description 9
- 230000008569 process Effects 0.000 description 6
- 230000000694 effects Effects 0.000 description 5
- 210000003815 abdominal wall Anatomy 0.000 description 4
- 238000002350 laparotomy Methods 0.000 description 4
- 210000004185 liver Anatomy 0.000 description 4
- 238000013459 approach Methods 0.000 description 3
- 230000033001 locomotion Effects 0.000 description 3
- 238000000926 separation method Methods 0.000 description 3
- 210000000952 spleen Anatomy 0.000 description 3
- 206010061218 Inflammation Diseases 0.000 description 2
- 241000469816 Varus Species 0.000 description 2
- 210000001015 abdomen Anatomy 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 230000004054 inflammatory process Effects 0.000 description 2
- 210000003041 ligament Anatomy 0.000 description 2
- 210000002784 stomach Anatomy 0.000 description 2
- 230000008685 targeting Effects 0.000 description 2
- 229920000954 Polyglycolide Polymers 0.000 description 1
- 230000003187 abdominal effect Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 210000001035 gastrointestinal tract Anatomy 0.000 description 1
- 230000002440 hepatic effect Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 210000000936 intestine Anatomy 0.000 description 1
- 230000009545 invasion Effects 0.000 description 1
- 238000012830 laparoscopic surgical procedure Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 239000004633 polyglycolic acid Substances 0.000 description 1
- 230000003393 splenic effect Effects 0.000 description 1
Images










Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/02—Surgical instruments, devices or methods, e.g. tourniquets for holding wounds open; Tractors
- A61B17/0218—Surgical instruments, devices or methods, e.g. tourniquets for holding wounds open; Tractors for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/068—Surgical staplers, e.g. containing multiple staples or clamps
- A61B17/072—Surgical staplers, e.g. containing multiple staples or clamps for applying a row of staples in a single action, e.g. the staples being applied simultaneously
- A61B17/07292—Reinforcements for staple line, e.g. pledgets
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/11—Surgical instruments, devices or methods, e.g. tourniquets for performing anastomosis; Buttons for anastomosis
- A61B17/1114—Surgical instruments, devices or methods, e.g. tourniquets for performing anastomosis; Buttons for anastomosis of the digestive tract, e.g. bowels or oesophagus
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/03—Automatic limiting or abutting means, e.g. for safety
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/11—Surgical instruments, devices or methods, e.g. tourniquets for performing anastomosis; Buttons for anastomosis
- A61B17/115—Staplers for performing anastomosis in a single operation
- A61B17/1155—Circular staplers comprising a plurality of staples
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00004—(bio)absorbable, (bio)resorbable or resorptive
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00238—Type of minimally invasive operation
- A61B2017/00269—Type of minimally invasive operation endoscopic mucosal resection EMR
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
- A61B2017/00407—Ratchet means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00743—Type of operation; Specification of treatment sites
- A61B2017/00818—Treatment of the gastro-intestinal system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00862—Material properties elastic or resilient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/02—Surgical instruments, devices or methods, e.g. tourniquets for holding wounds open; Tractors
- A61B17/0218—Surgical instruments, devices or methods, e.g. tourniquets for holding wounds open; Tractors for minimally invasive surgery
- A61B2017/0225—Surgical instruments, devices or methods, e.g. tourniquets for holding wounds open; Tractors for minimally invasive surgery flexible, e.g. fabrics, meshes, or membranes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/11—Surgical instruments, devices or methods, e.g. tourniquets for performing anastomosis; Buttons for anastomosis
- A61B2017/1103—Approximator
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/11—Surgical instruments, devices or methods, e.g. tourniquets for performing anastomosis; Buttons for anastomosis
- A61B2017/1121—Surgical instruments, devices or methods, e.g. tourniquets for performing anastomosis; Buttons for anastomosis adapted for performing tissue or graft eversion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/03—Automatic limiting or abutting means, e.g. for safety
- A61B2090/033—Abutting means, stops, e.g. abutting on tissue or skin
- A61B2090/034—Abutting means, stops, e.g. abutting on tissue or skin abutting on parts of the device itself
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/08—Accessories or related features not otherwise provided for
- A61B2090/0817—Spatulas or spatula like extensions
Definitions
- the present invention relates to a tissue pusher used for pushing tissue in a body cavity.
- This application claims priority based on Japanese Patent Application No. 2015-086247 for which it applied to Japan on April 20, 2015, and uses the content here.
- a method of excising a part of a luminal organ such as the digestive tract there are known a method using a laparotomy in which an abdomen is largely incised and a method using an endoscope or the like without incising the abdomen.
- the method of laparotomy can easily perform wide excision, but the invasiveness to the patient is large.
- the method using an endoscope is less invasive to a patient, but has a limited size of a resectable lesion.
- Non-Patent Document 1 proposes a technique for performing cooperation between a medical device introduced from a natural opening and a medical device introduced into the abdominal cavity.
- Non-Patent Document 1 is not general because it requires advanced techniques such as locking and lifting the stomach wall to the abdominal wall.
- it has been proposed to push a luminal organ with forceps introduced into the abdominal cavity and to perform excision on the target tissue with a medical device introduced into the luminal organ.
- a medical device introduced into the luminal organ As will be described in detail later, in some luminal organs, there are portions that are difficult to be pushed in with forceps introduced into the abdominal cavity, and therefore it may be difficult to perform the procedure.
- an object of the present invention is to provide a tissue pushing tool that can push a tissue suitably regardless of the position of a lesion.
- the tissue pushing tool is capable of bending the shaft extending in one direction, the tissue pushing portion pressed against the tissue, and the tissue pushing portion in all directions around the axis of the shaft.
- a passive bending portion connected to the shaft.
- the passive bending portion may be a ball joint.
- the passive bending portion in the tissue pushing tool according to the first aspect, may be made of an elastic body.
- the tissue pushing portion in the tissue pushing tool according to any one of the first to third aspects, can change a direction with respect to the shaft on a distal end side with respect to the passive bending portion. It may be configured.
- the tissue pushing portion in the tissue pushing tool according to the fourth aspect, may have a ratchet on the tip side of the passive bending portion.
- the tissue pushing tool of the fourth or fifth aspect may further comprise a stopper that defines a variable range of the direction of the tissue pushing portion with respect to the shaft.
- the tissue pushing portion in any one of the tissue pushing tools according to the fourth to sixth aspects, the tissue pushing portion may be configured to be able to actively change the orientation with respect to the shaft.
- the tissue pushing portion may have a bent portion having a curved surface at a tip portion.
- the tissue pushing portion in the tissue pushing tool according to any one of the first to eighth aspects, may be made of a biodegradable material at least at a site in contact with the tissue. .
- the tissue pushing portion in the tissue pushing tool according to the ninth aspect, is composed of two arms connected to the passive bending portion and the biodegradable material. And a linear member stretched between the arms.
- the portion made of the biodegradable material may have elasticity that can be expanded and contracted.
- tissue pushing tool of the present invention it is possible to push the tissue suitably regardless of the position of the lesion.
- tissue pushing tool which concerns on the modification of 3rd embodiment of this invention in a partial cross section. It is a figure which shows one process at the time of use of the structure
- tissue excision method (Reference example: Tissue excision method) First, the outline
- a tissue excision method according to a reference example of the present invention will be described by taking, as an example, a case where a tissue of a certain region including a lesioned part is excised over all layers for a large intestine which is a luminal organ.
- a first operator an operator who approaches the tissue to be excised from the lumen side of the large intestine
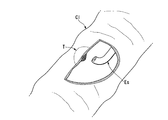
- FIG. 1 is a diagram illustrating an example of a first step in a tissue excision method according to a reference example.
- the first operator introduces observation means such as an endoscope Es into the large intestine Cl, and observes the inside of the large intestine Cl with the observation means to determine the position and range of the tissue T to be excised. Identify (first step).
- the first operator After specifying the position and range of the tissue T to be excised, the first operator shows the position and range of the tissue T to be excised from the abdominal side to the second operator.
- a specific method for indicating the position and the range is not particularly limited, and a known method can be appropriately selected and used.
- a part of the tissue to be excised T is pushed with an endoscope or a treatment tool inserted into the endoscope and protruded to the abdominal cavity side, and a part of the tissue to be excised T is marked. Illuminating a part of the abdominal cavity so as to be visible.
- the second operator who has confirmed the position of the tissue T to be excised inserts the tissue pushing tool into the access port formed in the abdominal wall and introduces the tissue pushing tool into the abdominal cavity.
- the tissue pushing tool into the access port formed in the abdominal wall and introduces the tissue pushing tool into the abdominal cavity.
- FIG. 2 is a view showing a tissue pushing tool 100 used in the tissue resection method according to the reference example.
- the tissue pushing tool 100 has a structure in which a pair of arms 102 and 103 are provided at the tip of a rod-shaped main body 101.
- a linear member (tissue contact portion) 104 is stretched between the distal ends of the pair of arms 102 and 103.
- the linear member 104 is a biodegradable member that is formed of a biodegradable material that is decomposed and absorbed without causing inflammation or the like in the living body, and has a foldable flexibility.
- the base end portions of the pair of arms 102 and 103 are rotatably connected to the distal end portion of the main body 101, and the angle formed by the arms 102 and 103 and the main body 101 can be held with a constant holding force. For this reason, the pair of arms 102 and 103 can be made parallel to the main body 101 so that the entire tissue pushing tool 100 can be linear. Further, the pair of arms 102 and 103 can be opened to stretch the linear member 104 linearly.
- the pair of arms 102 and 103 may be configured to be opened and closed by the second operator.
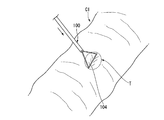
- FIG. 3 is a diagram illustrating an example of a second step in the tissue excision method according to the reference example.
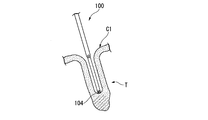
- FIG. 4 is a view showing the tissue to be excised that is turned in the second step.
- the second operator brings the linear member 104 into contact with the tissue T to be excised indicated by the first operator, and pushes the tissue to be excised with the tissue pusher 100.
- the tissue T to be excised is deformed so as to protrude inside the large intestine Cl, and the site where the linear member 104 is in contact is taken as a fold line to the lumen side of the large intestine Cl (Second step).
- the folded state is referred to as a “turned state” or a “varus state”.
- the resection target tissue T in the varus state is sandwiched only by the linear member 104 on the abdominal cavity side, and the arms 102 and 103 are not sandwiched between the resection target tissues T.
- the first operator removes the tissue T to be excised from the luminal side of the large intestine Cl over the entire layer.
- tissue to be excised T When the tissue to be excised T is excised over the entire layer, a hole communicating with the abdominal cavity is formed in the luminal organ. Therefore, the hole is closed by anastomosis or suture (hereinafter also referred to as “anastomosis”).
- anastomosis or suture
- the third step is the process of excising the tissue and anastomosing the hole.
- the tissue excision and the hole anastomosis may be performed separately using different medical devices, but a known linear stapler, circular stapler (hereinafter, sometimes referred to as “stapler etc.”), and high frequency.
- FIG. 5 is a diagram illustrating an example of a third step in the tissue excision method according to the reference example.
- tissue excision, hole anastomosis, and the like are performed using the linear stapler 10.
- the tissue resection method according to the reference example is completed.
- a part of the linear member 104 may be locked on the staple or the like and remain on the outer surface of the luminal organ.
- the linear member 104 is formed of a biodegradable material, it disappears without causing inflammation or the like over time.
- the tissue to be excised in the second step, is deflected to the lumen side of the luminal organ by the tissue pushing tool introduced into the abdominal cavity. Even when approached from the cavity side, the tissue to be excised can be easily excised. In other words, when the tissue to be excised is not turned upside down, it is necessary to perform excision with a separation line that surrounds the tissue to be excised, and this is complicated and difficult to perform from the lumen side. On the other hand, when the tissue to be excised is turned inside out, it is sufficient to set the shape of the separation line so as to surround the tissue to be excised when the tissue to be excised is deployed. Resection can be performed with a straight line or a single arc-shaped line, and can be easily performed using a stapler or the like from the lumen side.
- FIG. 6 is a diagram illustrating an example of a tissue pushing tool according to a modification of the reference example.
- a tissue pusher 110 according to a modification has a sheet-like biodegradable member (tissue contact portion) 114 attached between a first arm 112 and a second arm 113.
- the first arm 112 and the second arm 113 are parallel to the main body 111 and can be linearly deformed as a whole of the tissue pusher 110, and the biodegradable member 114 can be bent, so that it can be easily introduced into the abdominal cavity from the access port. Is possible.
- FIG. 7 is a diagram illustrating an example of the second step using the tissue pushing tool according to the modification of the reference example. As shown in FIG. 7, the second step is performed on the large intestine Cl using the tissue pushing tool 110.
- the tissue pushing tool is not limited to the one that attaches the biodegradable member.
- both ends of the linear member 104 may be gripped with two known grasping forceps, and the linear member stretched linearly may be pressed against the tissue to be excised.
- the biodegradable member 114 may be held by one grasping forceps and pressed against the tissue to be excised. In these cases, the grasping forceps constitute a part of the tissue pushing tool.
- the medical device that performs the third step is not limited to one that uses staples.
- tissue excision or hole anastomosis may be performed by application of energy.
- tissue pushing tool Next, a first embodiment of the present invention will be described with reference to FIGS.
- a tissue pushing tool that is preferably used in the tissue excision method described in the reference example will be described.
- components that are the same as those already described are assigned the same reference numerals and redundant description is omitted.
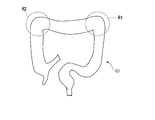
- FIG. 8 is a diagram schematically showing the human large intestine.
- the tissue excision method of the present invention has already been described as targeting luminal organs such as the stomach and intestine, in the case of targeting the large intestine Cl, the spleen curve and its surroundings shown in range R1 in FIG. 8 and the range R2 In the hepatic folds shown in FIG. 4 and the vicinity thereof, the execution of the second step and the third step may be difficult.
- the excision anastomosis device main body and the anvil part cannot be sufficiently brought close to each other while maintaining the state where the tissue pushing tool and the excision anastomosis device are brought into contact with each other and the tissue is pushed in. Tissue excision and hole anastomosis become difficult.
- the tissue pushing tool of the present embodiment can suitably execute the tissue excision method of the present invention even at a site such as a spleen curve (range R1) or a liver curve (range R2). It can also be suitably used for parts other than those such as liver folds.
- a site such as a spleen curve (range R1) or a liver curve (range R2).
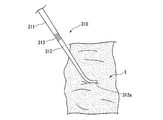
- FIG. 9 is a view showing the tissue pushing tool 310 according to the present embodiment.
- the tissue pushing tool 310 includes a rigid shaft 311 extending in one direction, a pushing member (tissue pushing portion) 312 connected to the shaft 311, and a coil spring (elastic body, passive bending portion) that connects the shaft 311 and the pushing member 312. 313.
- the pushing member 312 can be bent in all directions around the axis of the shaft 311 with respect to the shaft 311 by being connected by the shaft 311 and the coil spring 313.
- the push-in member 312 is a rod-like or belt-like member that is formed of a biodegradable material and has a rigidity that can retain the shape even when pressed against the tissue to be excised.
- the push-in member 312 has a bent portion 312a that is slightly bent and has a curved surface at the tip.
- the coil spring 313 only needs to have an elasticity that can generate passive bending described later, and there is no particular limitation on the material, shape, and the like.
- tissue pushing tool 310 configured as described above is used will be described using an example in which it is used together with a circular stapler-type excision anastomosis device. Since the tissue pushing tool 310 is substantially straight when no force is applied, it can be easily inserted into the access port and introduced into the abdominal cavity.
- FIG. 10 and FIG. 11 are diagrams showing a process during use of the tissue pushing tool according to the first embodiment.
- the second operator brings the curved surface outside the bent shape in the bending portion 312a into contact with the tissue T to be excised as shown in FIG.
- the second operator advances the tissue pushing tool 310
- the excision target tissue T is pressed by the bending portion 312a.
- the reaction force received from the tissue T to be excised acts on the bent portion 312a, and the coil spring 313 is elastically deformed.
- the pushing member 312 rotates so as to form an angle with the shaft 311, and the pushing member 312 comes into contact with the tissue T to be excised in a longer range.
- the tissue T to be excised can be pressed in a linear shape and turned inside out.
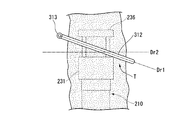
- FIG. 12 is a diagram showing an example of the positional relationship between the tissue pushing tool and the excision anastomosis device according to the first embodiment
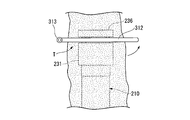
- FIG. 13 is a diagram in which the positional relationship between the tissue pushing tool and the excision anastomosis device in FIG. 12 is corrected.
- FIG. 12 At the end of the second step, as shown in FIG. 12, the direction Dr1 in which the contact portion between the pushing member 312 and the tissue T to be excised extends, and the excision anastomosis device 210 including the excision anastomosis device main body 231 and the anvil portion 236. There may be a case where the width direction Dr2 of the portion is not parallel.
- the push-in member 312 positioned between the anvil portion 236 and the main body 231 becomes the anvil portion. 236 is pressed as the main body 231 approaches.
- the coil spring 313 is elastically deformed, and the pushing member 312 is passively bent (rotated and moved) with the coil spring 313 as a fulcrum as shown in FIG.
- the direction Dr 1 and the direction Dr 2 are finally parallel, and the tissue T to be excised is suitably sandwiched between the anvil part 236 and the main body 231. In this state, tissue excision and hole anastomosis in the third step are performed.
- the passive bending portion including the coil spring 313 is provided between the shaft 311 and the pushing member 312.
- the pushing member 312 can be bent (rotated and moved) in all directions around the axis of the shaft 311 with respect to the shaft 311 by deformation of the coil spring 313. Therefore, there is no relationship between the direction Dr1 and the direction Dr2. However, the direction Dr1 and the direction Dr2 are corrected so as to be parallel. Therefore, even if the tissue to be excised is in a site such as a splenic curve (range R1) or a liver curve (range R2), the second step and the third step are easily performed using an access port formed at a general position.
- the angle adjustment operation of the pushing member 312 by the second operator, the cooperative operation of the first operator and the second operator, and the like are not necessary.
- FIG. 14 is a view showing a tissue pushing tool 320 according to the second embodiment. Similar to the tissue pusher 100 described in the reference example, the tissue pusher 320 includes arms 102 and 103 and a linear member 104. The tissue pushing portion 323 composed of the arms 102 and 103 and the linear member 104 and the shaft 321 are connected via a coil spring 313.
- the shaft 321 is hollow, and a wire 322 for opening and closing the arms 102 and 103 is inserted therethrough.
- the distal end portion of the wire 322 and the proximal end portions of the arms 102 and 103 are connected by a known link mechanism or the like, and the arms 102 and 103 can be opened and closed by moving the wire 322 forward and backward with respect to the shaft. .
- the operation when using the tissue pushing tool 320 is basically the same as that of the tissue pushing tool 100 of the reference example, and the operation of the coil spring 313 is the same as that of the tissue pushing tool 310 of the first embodiment.
- the tissue pushing tool 320 according to the present embodiment having such a configuration has the same effects as the tissue pushing tool 310 of the first embodiment.
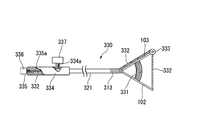
- FIG. 15 is a diagram illustrating a tissue pushing tool according to a modification of the present embodiment with a part thereof broken.
- the tissue pushing tool 330 according to the modification of the present embodiment does not include the wire 322.
- a deployment spring 331 is attached between the arms 102 and 103 and urges the pair of arms 102 and 103 to open.
- One end of the linear member 332 is fixed to the tip of the arm 102.
- the linear member 332 is hooked on a pulley 333 attached to the tip of the arm 103, and then protrudes from the base end of the shaft 321 through the coil spring 313 and the shaft 321.
- the base end side of the shaft 321 is inserted into the adjustment cylinder 334.
- the adjustment cylinder 334 has a bottom surface 335 on the proximal end side.
- the linear member 332 is drawn out from a hole 335 a formed in the bottom surface 335.
- a stopper 336 is fixed to the end portion of the linear member 332 drawn out from the hole 335a to prevent the linear member 332 from coming out of the hole 335a into the adjusting cylinder 334.
- a through hole 334 a that communicates with the inner cavity is provided on the outer peripheral surface of the adjustment cylinder 334, and a screw 337 is attached to the through hole 334 a. When the screw 337 is loose, the adjustment cylinder 334 can move forward and backward with respect to the shaft 321. When the screw 337 is tightened, the positional relationship between the adjustment cylinder 334 and the shaft 321 can be fixed.
- the tissue pushing tool 330 having such a configuration has the same effects as the tissue pushing tool 310 of the first embodiment.
- the length of the linear member 322 between the arms 102 and 103 can be changed according to the tissue to be excised. Regardless of the length of the linear member 322 between the arms, a tension is always applied by the expansion spring 331.
- the linear member 322 is loosened at the distal end side of the tissue pushing tool 330 even if the length of the linear member 322 is adjusted. Absent. As a result, it is possible to suppress a situation in which the linear member is entangled with other devices or the like in the body. Further, since the adjusting cylinder 334 and the screw 337 are provided, the closed state and the opening width of the arms 102 and 103 can be easily maintained, and the operability is good.
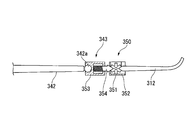
- FIG. 16 is a partial cross-sectional view of the tissue pushing tool 340 according to the third embodiment.
- a passive bending portion is configured by a ball joint 343 instead of a coil spring.
- the proximal end portion of the pushing member 312 is rotatably supported by the block 341.
- the front end 342 a of the shaft 342 is formed in a spherical shape and is fitted in a recess 341 a formed in the block 341. That is, the ball joint 343 is configured by the tip 342 a and the block 341.
- the shaft 342 and the pushing member 312 are connected via a ball joint 343.
- the pushing member 312 When the tissue to be excised is pressed by the pushing member 312, the pushing member 312 is passively rotated with respect to the block 341 by a reaction force received from the tissue to be excised, and changes an angle formed with the shaft 342 (direction with respect to the shaft 342). .
- the pushing member 312 rotates about 90 degrees with respect to the block 341, the pushing member 312 comes into contact with the block 341 and does not turn any further. That is, the block 341 functions as a stopper that defines a variable range of the direction of the pushing member 312 with respect to the shaft 342.
- the operation of the passive bending portion composed of the ball joint 343 is substantially the same as in the first embodiment.
- the tissue pushing tool 340 of this embodiment having such a configuration has the same effects as the tissue pushing tool 310 of the first embodiment. Further, since the pushing member 312 is rotatably attached to the block 341 on the tip side from the ball joint 343, fine adjustment of the direction of the pushing member 312 with respect to the shaft 342 is performed when the second step is executed. be able to. Furthermore, since the block 341 functions as a stopper, it is difficult for the push-in member 312 to rotate too much and be difficult to operate. In the tissue pushing tool 340, the angle of the pushing member 312 where the block 341 starts to function as a stopper can be adjusted by appropriately setting the shape of the block 341.
- FIG. 17 is a partial cross-sectional view of a tissue pushing tool according to a modification of the present embodiment.
- a ratchet 351 is provided at the proximal end portion of the pushing member 312.
- the push-in member 312 is attached to the first member 352 so as to be rotatable by the ratchet 351 being pivotally supported.
- a tip end portion 342 a of the shaft 342 is formed in a spherical shape and is fitted into the second member 353.
- a ball joint 343 is configured by the tip 342 a and the second member 353.
- a ratchet pin 354 that is biased so as to be pressed against the teeth of the ratchet 351 is attached to the second member 353.
- the first member 352 and the second member 353 are integrally connected by a link (not shown) via a ratchet pin 354.
- the pushing member 312 changes the direction with respect to the shaft 342 as the ratchet 351 rotates with respect to the ratchet pin 354. That is, the angle formed by the shaft 342 and the pushing member 312 changes by one tooth of the ratchet 351, and the angle is maintained even if the pushing member 312 is separated from the tissue to be excised.
- the operation of the passive bending portion composed of the ball joint 343 is substantially the same as in the first embodiment.
- the tissue pushing tool 350 having such a configuration has the same effects as the tissue pushing tool 310 of the first embodiment.
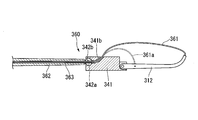
- FIG. 18 is a cross-sectional view showing a tissue pushing tool according to another modification of the present embodiment.
- a pulling member 361 is connected to the distal end portion of the pushing member 312.
- the shaft 362 has substantially the same shape as the shaft 342, but a through hole 363 is formed along the axis.
- the pulling member 361 passes through the block 341 and is passed through the shaft 362 from the front end side opening of the through hole 363. Other points are the same as the tissue pusher 340.
- the pulling member does not necessarily have to be connected to the distal end portion of the pushing member, and may be a position where the pushing member is rotated. For example, it may be connected to a part of the push-in member like a pulling member 361a (dotted line) in FIG.
- the tissue pusher 360 having such a configuration has the same effect as the tissue pusher 310 of the first embodiment. Further, by pulling the pulling member 361, the pushing member 312 can be rotated to actively adjust the direction with respect to the shaft 362, and therefore the second step can be suitably performed.
- the traction member 361 is disposed along the central axis of the shaft 362, and the hole through which the traction member 361 is inserted in the block 341 with respect to the diameter of the hole 342b through which the traction member 361 is inserted in the shaft tip portion 342a. Since the diameter of 341b is sufficiently large, even if the pulling member 361 is pulled, it is difficult to greatly hinder the operation of the ball joint.
- FIG. 19 is a view showing a tissue pushing tool according to this modification in partial cross section.
- FIG. 20 is a diagram illustrating a process in using the tissue pushing tool of FIG.
- the tissue pushing tool 370 of the present modified example is fixed to a block 341, a first arm 371 that extends substantially parallel to the shaft 342, and a second arm that is rotatably attached to the block 341. 372.
- a linear member 373 is stretched between the first arm 371 and the second arm 372.
- a pulling member 374 is connected to the proximal end side of the second arm 372 and is passed through the shaft 342.
- the tissue pushing tool 370 when the pulling member 374 connected to the second arm 372 is pulled from the proximal end side of the shaft 342, the second arm 372 is rotated, and as shown in FIG. Becomes a substantially U-shaped open shape, and tension is applied to the linear member 373.
- the tissue pushing tool 370 of this modification may be configured to include the arms 102 and 103 of the second embodiment described above instead of the first arm 371 and the second arm 372.
- the tissue pushing tool 320 of the second embodiment may be configured to include the first arm 371 and the second arm 372 of this modification.
- the operation is performed when the passive bending part moves before the other part. It can be difficult. Therefore, it is preferable to set the force necessary for the operation of the passive bending portion to be larger than the force necessary for changing the angle in another part.
- the passive bending portion may be accommodated in the outer sheath or the like and held so as not to be bent, and then the outer sheath or the like may be removed to cause passive bending. Good.
- a linear member formed of a biodegradable material that has elasticity that can be expanded and contracted, such as rubber, it can be easily assembled so as to be tensioned and manufactured easily. Further, in the case of a structure that opens and closes the arm over which the linear member is stretched, the amount of slackness of the linear member can be reduced, which is preferable.
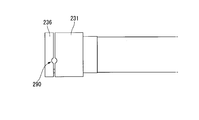
- FIG. 21 is a partially enlarged view of a resecting anastomosis device corresponding to a tissue pushing tool according to a modification of the present invention.
- the excision anastomosis apparatus main body 231 and the anvil part 236 are provided with a relief part 290 corresponding to the size of the tissue pushing part.
- the tissue push-in portion is allowed to escape when the tissue push-in portion is held between the main body and the anvil portion without interfering with the main body and the anvil portion, and the tissue to be excised is held sufficiently.
- the third step may be performed after being removed from the section and retracted.
- the present invention can be widely applied to a tissue pushing tool used when pushing a tissue into a body cavity, and allows the tissue to be suitably pushed regardless of the position of the lesion.
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Molecular Biology (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Animal Behavior & Ethology (AREA)
- Engineering & Computer Science (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Physiology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Pathology (AREA)
- Surgical Instruments (AREA)
Abstract
一方向に延びるシャフト(311)と、組織に押し当てられる組織押し込み部(312)と、前記組織押し込み部を、前記シャフトの軸線まわりの全方向に屈曲可能に前記シャフトと接続する受動屈曲部と(313)とを備えることで、病変の位置に関係なく好適に組織を押し込むことができる組織押込み具(310)を提供する。
Description
本発明は、体腔内で組織を押し込む際に使用する組織押し込み具に関する。
本願は、2015年4月20日に、日本に出願された特願2015-086247号に基づき優先権を主張し、その内容をここに援用する。
本願は、2015年4月20日に、日本に出願された特願2015-086247号に基づき優先権を主張し、その内容をここに援用する。
消化管等の管腔臓器の一部を切除する方法として、腹部を大きく切開する開腹によるものと、内視鏡等を用いて腹部を切開せずに行うものとが知られている。
開腹する方法は、広範囲の切除も容易に行える半面、患者に与える侵襲が大きい。一方、内視鏡を用いた方法は、患者に与える侵襲が小さい反面、切除可能な病変の大きさに限りがある。
開腹する方法は、広範囲の切除も容易に行える半面、患者に与える侵襲が大きい。一方、内視鏡を用いた方法は、患者に与える侵襲が小さい反面、切除可能な病変の大きさに限りがある。
上述したように、開腹する方法、および内視鏡等を用いた方法のいずれにも弱点がある。したがって、内視鏡等を用いた方法よりも広い範囲を切除でき、かつ開腹する方法よりも患者に与える侵襲が小さい組織の切除方法が求められている。これに関連して、非特許文献1には、自然開口から導入した医療機器と腹腔内に導入した医療機器とを協働させて行う術式が提案されている。
日本外科学会雑誌 vol.115,No.2,102-104
しかしながら、非特許文献1に記載の術式は、胃壁を腹壁に係止して吊り上げる等、高度な技術を必要とするため、一般的ではない。
他の方法として、腹腔内に導入した鉗子で管腔臓器を押し込み、管腔臓器内に導入した医療機器で対象組織に切除等を行うことが提案されている。しかし、詳細は後述するが、一部の管腔臓器においては、腹腔内に導入した鉗子では押し込みにくい部位が存在するため、手技の実行が難しい場合がある。
他の方法として、腹腔内に導入した鉗子で管腔臓器を押し込み、管腔臓器内に導入した医療機器で対象組織に切除等を行うことが提案されている。しかし、詳細は後述するが、一部の管腔臓器においては、腹腔内に導入した鉗子では押し込みにくい部位が存在するため、手技の実行が難しい場合がある。
上記事情を踏まえ、本発明は、病変の位置に関係なく好適に組織を押し込むことができる組織押し込み具を提供することを目的とする。
本発明の第1態様によれば、組織押し込み具は、一方向に延びるシャフトと、組織に押し当てられる組織押し込み部と、前記組織押し込み部を、前記シャフトの軸線まわりの全方向に屈曲可能に前記シャフトと接続する受動屈曲部とを備える。
本発明の第2態様によれば、第1態様の組織押し込み具において、前記受動屈曲部は、ボールジョイントからなるものでもよい。
本発明の第3態様によれば、第1態様の組織押し込み具において、前記受動屈曲部は、弾性体からなるものでもよい。
本発明の第3態様によれば、第1態様の組織押し込み具において、前記受動屈曲部は、弾性体からなるものでもよい。
本発明の第4態様によれば、第1態様から第3態様のいずれか1つの組織押し込み具において、前記組織押し込み部は、前記受動屈曲部よりも先端側において前記シャフトに対する向きを変更可能に構成されてもよい。
本発明の第5態様によれば、第4態様の組織押し込み具において、前記組織押し込み部は、前記受動屈曲部よりも先端側にラチェットを有してもよい。
本発明の第6態様によれば、第4態様または第5態様の組織押し込み具において、前記組織押し込み部の前記シャフトに対する向きの可変範囲を規定するストッパーをさらに備えてもよい。
本発明の第7態様によれば、第4態様から第6態様のいずれか1つの組織押し込み具において、前記組織押し込み部は、前記シャフトに対する向きを能動的に変更可能に構成されてもよい。
本発明の第5態様によれば、第4態様の組織押し込み具において、前記組織押し込み部は、前記受動屈曲部よりも先端側にラチェットを有してもよい。
本発明の第6態様によれば、第4態様または第5態様の組織押し込み具において、前記組織押し込み部の前記シャフトに対する向きの可変範囲を規定するストッパーをさらに備えてもよい。
本発明の第7態様によれば、第4態様から第6態様のいずれか1つの組織押し込み具において、前記組織押し込み部は、前記シャフトに対する向きを能動的に変更可能に構成されてもよい。
本発明の第8態様によれば、第1態様から第7態様のいずれか1つの組織押し込み具において、前記組織押し込み部は、先端部に曲面を有する曲げ部を有してもよい。
本発明の第9態様によれば、第1態様から第8態様のいずれか1つの組織押し込み具において、前記組織押し込み部は、少なくとも前記組織と接触する部位が生分解性材料からなるものでもよい。
本発明の第10態様によれば、第9態様の組織押し込み具において、前記組織押し込み部は、前記受動屈曲部に接続された2本のアームと、前記生分解性材料からなり、前記2本のアーム間に張り渡された線状部材とを有してもよい。
本発明の第11態様によれば、第9態様または第10態様の組織押し込み具において、前記生分解性材料からなる部位が、伸縮可能な程度の弾性を有してもよい。
本発明の第10態様によれば、第9態様の組織押し込み具において、前記組織押し込み部は、前記受動屈曲部に接続された2本のアームと、前記生分解性材料からなり、前記2本のアーム間に張り渡された線状部材とを有してもよい。
本発明の第11態様によれば、第9態様または第10態様の組織押し込み具において、前記生分解性材料からなる部位が、伸縮可能な程度の弾性を有してもよい。
本発明の組織押し込み具によれば、病変の位置に関係なく好適に組織を押し込むことができる。
(参考例:組織切除方法)
まず、本発明の組織押し込み具を用いて行う組織切除方法の概要について、図1から図7を参照して説明する。以下、管腔臓器である大腸を対象として、病変部を含む一定の領域の組織を全層にわたって切除する場合を例にとり、本発明の参考例に係る組織切除方法を説明する。
以下の説明では、切除対象組織に対して大腸の内腔側からアプローチする術者を第一術者、切除対象組織に対して腹腔(体腔)側からアプローチする術者を第二術者と称する。
まず、本発明の組織押し込み具を用いて行う組織切除方法の概要について、図1から図7を参照して説明する。以下、管腔臓器である大腸を対象として、病変部を含む一定の領域の組織を全層にわたって切除する場合を例にとり、本発明の参考例に係る組織切除方法を説明する。
以下の説明では、切除対象組織に対して大腸の内腔側からアプローチする術者を第一術者、切除対象組織に対して腹腔(体腔)側からアプローチする術者を第二術者と称する。
図1は、参考例に係る組織切除方法における第一ステップの一例を示す図である。まず、第一術者は、図1に示すように、内視鏡Es等の観察手段を大腸Cl内に導入し、観察手段で大腸Cl内を観察して切除対象組織Tの位置および範囲を特定する(第一ステップ)。
切除対象組織Tの位置および範囲を特定した後、第一術者は、切除対象組織Tの位置や範囲を腹腔側から確認できる方法で第二術者に示す。位置や範囲を示すための具体的方法には特に制限はなく、公知の方法を適宜選択して用いることができる。例えば、内視鏡または内視鏡に挿入した処置具等で切除対象組織Tの一部を押し、腹腔側に突出させる、切除対象組織Tの一部に点墨を行う、切除対象組織Tの一部を腹腔側から視認可能に照明するなどが挙げられる。
切除対象組織Tの位置および範囲を特定した後、第一術者は、切除対象組織Tの位置や範囲を腹腔側から確認できる方法で第二術者に示す。位置や範囲を示すための具体的方法には特に制限はなく、公知の方法を適宜選択して用いることができる。例えば、内視鏡または内視鏡に挿入した処置具等で切除対象組織Tの一部を押し、腹腔側に突出させる、切除対象組織Tの一部に点墨を行う、切除対象組織Tの一部を腹腔側から視認可能に照明するなどが挙げられる。
切除対象組織Tの位置を確認した第二術者は、腹壁に形成したアクセスポートに組織押し込み具を挿入し、腹腔内に組織押し込み具を導入する。アクセスポートの形成方法には特に制限はなく、例えば、トロッカーの腹壁への留置により行うことができる。
図2は、参考例に係る組織切除方法に用いられる組織押し込み具100を示す図である。組織押し込み具100は、棒状の本体101の先端に一対のアーム102、103が設けられた構造を有する。一対のアーム102、103の先端部間には、線状部材(組織接触部)104が張り渡されている。線状部材104は、生体内で炎症等を起こさずに分解および吸収される生分解性の材料で形成され、折り曲げ可能な可撓性を有する生分解性部材である。
一対のアーム102、103の基端部は、本体101の先端部に回動可能に接続されており、アーム102、103と本体101とがなす角度を一定の保持力で保持可能である。このため、一対のアーム102、103を本体101と平行にして組織押し込み具100全体を直線状にすることができる。また、一対のアーム102、103を開いて線状部材104を直線状に張ることができる。一対のアーム102、103は、第二術者の手元で開閉操作可能に構成されてもよい。
第二術者は、腹腔内でアーム102、103を腹壁に押し当てたり、手元でアーム102、103を操作したりして組織押し込み具100のアーム102、103を開く。図3は、参考例に係る組織切除方法における第二ステップの一例を示す図である。図4は、第二ステップにおいて、内反された切除対象組織を示す図である。
図3に示すように、第二術者は、第一術者から示された切除対象組織Tに線状部材104を接触させて、組織押し込み具100で切除対象組織を押す。この動作により、切除対象組織Tは、図4に示すように、大腸Clの内側に突出するように変形し、線状部材104が接触している部位を折り曲げ線として、大腸Clの内腔側に折り畳まれる(第二ステップ)。以下の説明では、このように折りたたまれた状態を、「内反された状態」あるいは「内反状態」と称する。内反状態になった切除対象組織Tは、腹腔側において、線状部材104のみを間に挟んでおり、アーム102、103は切除対象組織Tの間に挟まれていない。
図3に示すように、第二術者は、第一術者から示された切除対象組織Tに線状部材104を接触させて、組織押し込み具100で切除対象組織を押す。この動作により、切除対象組織Tは、図4に示すように、大腸Clの内側に突出するように変形し、線状部材104が接触している部位を折り曲げ線として、大腸Clの内腔側に折り畳まれる(第二ステップ)。以下の説明では、このように折りたたまれた状態を、「内反された状態」あるいは「内反状態」と称する。内反状態になった切除対象組織Tは、腹腔側において、線状部材104のみを間に挟んでおり、アーム102、103は切除対象組織Tの間に挟まれていない。
第一術者は、内反された切除対象組織Tを大腸Clの内腔側から全層にわたって切除する。切除対象組織Tを全層にわたって切除すると、腹腔と連通する孔が管腔臓器に形成されるため、この孔を吻合または縫合(以下、「吻合等」と称することがある。)して閉じる。この組織の切除及び孔の吻合等を行う工程が第三ステップである。
組織の切除と孔の吻合等とは、異なる医療機器を用いて別々に行われてもよいが、公知のリニアステープラやサーキュラーステープラ(以下、「ステープラ等」と総称することがある。)、高周波吻合器等を用いると組織の切除と孔の吻合等とを同時に行うことが可能である。図5は、参考例に係る組織切除方法における第三ステップの一例を示す図である。図5の例では、リニアステープラ10を用いて組織の切除と孔の吻合等を行っている。
以上で、参考例に係る組織切除方法が完了する。
組織の切除と孔の吻合等とは、異なる医療機器を用いて別々に行われてもよいが、公知のリニアステープラやサーキュラーステープラ(以下、「ステープラ等」と総称することがある。)、高周波吻合器等を用いると組織の切除と孔の吻合等とを同時に行うことが可能である。図5は、参考例に係る組織切除方法における第三ステップの一例を示す図である。図5の例では、リニアステープラ10を用いて組織の切除と孔の吻合等を行っている。
以上で、参考例に係る組織切除方法が完了する。
ステープラ等を第三ステップに用いる場合、線状部材104の一部がステープル等に係止されて管腔臓器の外面上に残存することがある。しかし、線状部材104は生分解性の材料で形成されているため、時間経過により炎症等を起こさずに消失する。
以上説明したように、参考例の組織切除方法によれば、第二ステップにおいて、腹腔内に導入された組織押し込み具により切除対象組織が管腔臓器の内腔側に内反されるため、内腔側からのアプローチでも切除対象組織の切除が容易となる。
すなわち、切除対象組織が内反されていない場合、切除対象組織を取り囲むような形状の切離線で切除を行う必要があり、これを内腔側から行うことは煩雑かつ難しい。一方、切除対象組織が内反されている場合は、内反された切除対象組織が展開されたときに切除対象組織を取り囲むように切離線の形状を設定すればよいため、1~2本の直線状切離線または1本の円弧状の切離線で切除を行うことができ、内腔側からステープラ等を用いて容易に行うことができる。
すなわち、切除対象組織が内反されていない場合、切除対象組織を取り囲むような形状の切離線で切除を行う必要があり、これを内腔側から行うことは煩雑かつ難しい。一方、切除対象組織が内反されている場合は、内反された切除対象組織が展開されたときに切除対象組織を取り囲むように切離線の形状を設定すればよいため、1~2本の直線状切離線または1本の円弧状の切離線で切除を行うことができ、内腔側からステープラ等を用いて容易に行うことができる。
なお、参考例の組織切除方法において、切除対象組織と接触する生分解性部材は、上述のような線状部材に限られない。
図6は、参考例の変形例に係る組織押し込み具の一例を示す図である。図6に示すように、変形例の組織押し込み具110は、第一アーム112と第二アーム113との間に、シート状の生分解性部材(組織接触部)114が取り付けられている。第一アーム112および第二アーム113は本体111と平行かつ組織押し込み具110全体として直線状に変形可能であり、生分解性部材114が折り曲げ可能であるため、アクセスポートから容易に腹腔内に導入可能である。シート状の生分解性部材としては、例えばポリグリコール酸を材料としたグンゼ株式会社製ネオベール(NEOVEIL、商品名)などを用いることができる。
図7は、参考例の変形例に係る同組織押し込み具を用いた第二ステップの一例を示す図である。図7のように、組織押し込み具110を用いて、大腸Clに対し第二ステップを行う。
図6は、参考例の変形例に係る組織押し込み具の一例を示す図である。図6に示すように、変形例の組織押し込み具110は、第一アーム112と第二アーム113との間に、シート状の生分解性部材(組織接触部)114が取り付けられている。第一アーム112および第二アーム113は本体111と平行かつ組織押し込み具110全体として直線状に変形可能であり、生分解性部材114が折り曲げ可能であるため、アクセスポートから容易に腹腔内に導入可能である。シート状の生分解性部材としては、例えばポリグリコール酸を材料としたグンゼ株式会社製ネオベール(NEOVEIL、商品名)などを用いることができる。
図7は、参考例の変形例に係る同組織押し込み具を用いた第二ステップの一例を示す図である。図7のように、組織押し込み具110を用いて、大腸Clに対し第二ステップを行う。
さらに組織押し込み具は、上述のように、生分解性部材を取りつけるものには限られない。例えば、公知の把持鉗子2本で線状部材104の両端を把持し、直線状に張った線状部材を切除対象組織に押し当ててもよい。また、1本の把持鉗子で生分解性部材114を把持して生分解性部材114を切除対象組織に押し当ててもよい。これらの場合では、把持鉗子が組織押し込み具の一部を構成する。
また、第三ステップを行う医療機器は、ステープルを用いるものには限られない。例えば、エネルギの印加により組織の切除や孔の吻合が行われてもよい。
(第一実施形態:組織押し込み具)
次に、本発明の第一実施形態について、図8から図13を参照して説明する。本実施形態では、参考例で説明した組織切除方法に好適に用いられる組織押し込み具について説明する。
以降の説明において、既に説明したものと共通する構成については、同一の符号を付して重複する説明を省略する。
次に、本発明の第一実施形態について、図8から図13を参照して説明する。本実施形態では、参考例で説明した組織切除方法に好適に用いられる組織押し込み具について説明する。
以降の説明において、既に説明したものと共通する構成については、同一の符号を付して重複する説明を省略する。
図8は、ヒトの大腸を模式的に示す図である。本発明の組織切除方法は胃や腸等の管腔臓器を対象としていることは既に説明したが、大腸Clを対象とする場合、図8に範囲R1で示す脾弯曲およびその周辺、並びに範囲R2で示す肝弯曲およびその周辺においては、第二ステップおよび第三ステップの実行が困難となる可能性がある。
すなわち、腹腔鏡下の術式における一般的なアクセスポートの位置から組織押し込み具を導入し、サーキュラーステープラ型の切除吻合装置と組み合わせて手技を行おうとする場合、上述の箇所(範囲R1及びR2)では、切除吻合装置における切除吻合装置本体とアンビル部との隙間の長手方向(処置部の径方向に略等しい)と、組織押し込み具と切除対象組織との接触部位の長手方向とを合わせにくい場合がある。上記の二つの方向があっていないと、組織押し込み具と切除吻合装置とを当接させて組織を押し込んだ状態を保持しつつ切除吻合装置本体とアンビル部とを十分に接近させることができず、組織の切除及び孔の吻合が困難になる。
これに対し、切除対象組織の位置を腹腔内で移動させることが考えられるが、上述の箇所(範囲R1及びR2)は、靭帯で固定されているため、移動が困難である。また、移動させるために剥離や靭帯、血管等の切断等を行うと、患者の侵襲が大きくなる。
また、組織切除方法にとって好適な位置にアクセスポートを形成することも考えられるが、想定外の事態が起きた等により通常の腹腔鏡下手技に移行する場合、このようなアクセスポートでは腹腔鏡下手技が困難になる可能性がある。さらに、一般的なアクセスポートに加えて組織押し込み具専用のアクセスポートを形成すると、患者の侵襲が大きくなる。
また、組織切除方法にとって好適な位置にアクセスポートを形成することも考えられるが、想定外の事態が起きた等により通常の腹腔鏡下手技に移行する場合、このようなアクセスポートでは腹腔鏡下手技が困難になる可能性がある。さらに、一般的なアクセスポートに加えて組織押し込み具専用のアクセスポートを形成すると、患者の侵襲が大きくなる。
本実施形態の組織押し込み具は、脾弯曲(範囲R1)や肝弯曲(範囲R2)等の部位であっても、好適に本発明の組織切除方法を実行可能にするものであるが、脾弯曲や肝弯曲等の部位以外でも好適に用いることができる。以下、本実施形態の組織押し込み具の各実施例について説明する。
図9は、本実施形態に係る組織押し込み具310を示す図である。組織押し込み具310は、一方向に延びる硬質のシャフト311と、シャフト311に接続された押し込み部材(組織押し込み部)312と、シャフト311と押し込み部材312とを接続するコイルバネ(弾性体、受動屈曲部)313とを備えている。押し込み部材312は、シャフト311とコイルバネ313で接続されることにより、シャフト311に対して、シャフト311の軸線まわりの全方向に屈曲可能である。
押し込み部材312は、生分解性の材料で形成され、切除対象組織に押し当てても形状を保持できる程度の剛性を有する棒状または帯状の部材である。押し込み部材312は、わずかに曲げられて曲面を有する曲げ部312aを先端部に有する。
コイルバネ313は後述する受動屈曲を発生できる程度の弾性を有していればよく、材料や形状等に特に制限はない。
コイルバネ313は後述する受動屈曲を発生できる程度の弾性を有していればよく、材料や形状等に特に制限はない。
上記のように構成された組織押し込み具310の使用時の動作について、サーキュラーステープラ型の切除吻合装置と共に使用する例を用いて説明する。組織押し込み具310は、力を加えない状態では略直線状であるため、容易にアクセスポートに挿入して腹腔内に導入することができる。
図10および図11は、第一実施形態に係る組織押し込み具の使用時の過程を示す図である。組織押し込み具310を用いて第二ステップを行う際、第二術者は、図10に示すように、曲げ部312aにおける曲げ形状外側の曲面を、切除対象組織Tに接触させる。第二術者が組織押し込み具310を前進させると、曲げ部312aにより切除対象組織Tが押圧される。さらに、切除対象組織Tから受ける反力が曲げ部312aに作用し、コイルバネ313に弾性変形が生じる。その結果、図11に示すように、押し込み部材312がシャフト311と角度をなすように回動し、押し込み部材312が、より長い範囲で切除対象組織Tと接触する。この状態でさらに切除対象組織Tを押し込むことで、切除対象組織Tを線状に押圧して内反させることができる。
図12は、第一実施形態に係る組織押し込み具と切除吻合装置との位置関係の一例を示す図であり、図13は、図12の組織押し込み具と切除吻合装置との位置関係が補正される動作を示す図である。第二ステップの終了時において、図12に示すように、押し込み部材312と切除対象組織Tとの接触部位が延びる方向Dr1と、切除吻合装置210において切除吻合装置本体231およびアンビル部236を含む処置部の幅方向Dr2とが平行でない場合が生じうる。この場合、第二術者が押し込み状態を保持しつつ、第一術者がアンビル部236を本体231に接近させると、アンビル部236と本体231との間に位置する押し込み部材312は、アンビル部236と本体231との接近に伴って押圧される。その結果、コイルバネ313が弾性変形し、押し込み部材312は、図13に示すように、コイルバネ313を支点として受動的に屈曲(回転、移動)する。この押し込み部材312の受動屈曲(回転、移動)により、方向Dr1と方向Dr2とは最終的に平行となり、アンビル部236と本体231との間に好適に切除対象組織Tが挟まれる。この状態で、第三ステップにおける組織の切除および孔の吻合が行われる。
以上説明したように、本実施形態の組織押し込み具310によれば、シャフト311と押し込み部材312との間にコイルバネ313からなる受動屈曲部が設けられている。これにより、切除吻合装置のアンビル部と切除吻合装置本体との間で切除対象組織を内反させることができれば、たとえ方向Dr1と方向Dr2とが平行でなかったとしても、アンビル部と切除吻合装置本体とを接近させることにより、半自動的に方向Dr1と方向Dr2とが平行な状態を実現することができる。すなわち、押し込み部材312は、コイルバネ313の変形により、シャフト311に対して、シャフト311の軸線まわりの全方向に屈曲(回転、移動)可能であるため、方向Dr1と方向Dr2とがいかなる関係にあっても、方向Dr1と方向Dr2とが平行となるように補正される。したがって、切除対象組織が脾弯曲(範囲R1)や肝弯曲(範囲R2)等の部位にあったとしても、一般的な位置に形成されたアクセスポートを用いて第二ステップおよび第三ステップを容易に行うことができ、第二術者による押し込み部材312の角度調整操作や、第一術者と第二術者との協調動作等は必要ない。
(第二実施形態)
次に、本発明の第二実施形態について、図14及び図15を参照して説明する。図14は、第二実施形態に係る組織押し込み具320を示す図である。組織押し込み具320は、参考例で説明した組織押し込み具100同様、アーム102、103、および線状部材104を備えている。アーム102、103および線状部材104からなる組織押し込み部323とシャフト321とは、コイルバネ313を介して接続されている。
次に、本発明の第二実施形態について、図14及び図15を参照して説明する。図14は、第二実施形態に係る組織押し込み具320を示す図である。組織押し込み具320は、参考例で説明した組織押し込み具100同様、アーム102、103、および線状部材104を備えている。アーム102、103および線状部材104からなる組織押し込み部323とシャフト321とは、コイルバネ313を介して接続されている。
シャフト321は、中空であり、アーム102、103を開閉するためのワイヤ322が挿通されている。ワイヤ322の先端部とアーム102、103の基端部とは、公知のリンク機構等により接続されており、ワイヤ322をシャフトに対して進退することにより、アーム102、103を開閉することができる。
組織押し込み具320の使用時の動作は、基本的には参考例の組織押し込み具100と同様であり、コイルバネ313の動作は、第一実施形態の組織押し込み具310と同様である。このような構成の本実施形態に係る組織押し込み具320は、第一実施形態の組織押し込み具310と同様の効果を奏する。
図15は、本実施形態の変形例に係る組織押し込み具を一部破断して示す図である。本実施形態の変形例に係る組織押し込み具330はワイヤ322を備えていない。アーム102、103間には、展開バネ331が取り付けられており、一対のアーム102、103を開くように付勢している。線状部材332の一端は、アーム102の先端に固定されている。線状部材332は、アーム103の先端に取り付けられたプーリ333に掛けられた後、コイルバネ313およびシャフト321内を通ってシャフト321の基端から突出している。
シャフト321の基端側は、調節筒334に挿入されている。調節筒334は基端側に底面335を有する。線状部材332は、底面335に形成された孔335aから引き出されている。孔335aから引き出された線状部材332の端部には、止め具336が固定されており、線状部材332が孔335aから調節筒334の中に抜けることを防止している。調節筒334の外周面には、内腔に通じる貫通孔334aが設けられ、貫通孔334aにネジ337が取り付けられている。ネジ337が緩い状態では、調節筒334は、シャフト321に対して進退自在である。ネジ337を締め込むと、調節筒334とシャフト321との位置関係を固定することができる。
組織押し込み具330の使用時の動作について説明する。線状部材332を調節筒334の基端側に引くと、アーム102、103が閉じる。この操作により組織押し込み具330は全体として直線状になり、アクセスポートへの挿入および抜去が可能になる。
線状部材332の牽引を緩めると、図15に示すように、アーム102、103は展開バネ331により開く。アーム102、103の開き幅は、線状部材332のシャフト321に対する位置を変えることにより調節することができ、ネジ337を締め込むことにより調節された状態を保持することができる。
線状部材332の牽引を緩めると、図15に示すように、アーム102、103は展開バネ331により開く。アーム102、103の開き幅は、線状部材332のシャフト321に対する位置を変えることにより調節することができ、ネジ337を締め込むことにより調節された状態を保持することができる。
このような構成の組織押し込み具330は、第一実施形態の組織押し込み具310と同様の効果を奏する。
組織押し込み具330においては、アーム102、103間の線状部材322の長さを切除対象組織に応じて変更することが可能である。アーム間の線状部材322には、その長さにかかわらず、展開バネ331により常にテンションが付与される。また、線状部材332の端部がシャフト321の基端側に引き出されているため、線状部材322の長さを調節しても、線状部材322が組織押し込み具330の先端側で弛まない。その結果、線状部材が体内で他の器具等に絡む等の事態を抑制することができる。
さらに、調節筒334およびネジ337を備えているため、アーム102、103の閉状態や開き幅等を容易に保持することができ、操作性が良い。
組織押し込み具330においては、アーム102、103間の線状部材322の長さを切除対象組織に応じて変更することが可能である。アーム間の線状部材322には、その長さにかかわらず、展開バネ331により常にテンションが付与される。また、線状部材332の端部がシャフト321の基端側に引き出されているため、線状部材322の長さを調節しても、線状部材322が組織押し込み具330の先端側で弛まない。その結果、線状部材が体内で他の器具等に絡む等の事態を抑制することができる。
さらに、調節筒334およびネジ337を備えているため、アーム102、103の閉状態や開き幅等を容易に保持することができ、操作性が良い。
(第三実施形態)
次に、本発明の第三実施形態について、図16から図20を参照して説明する。図16は、第三実施形態に係る組織押し込み具340を一部断面で示す図である。組織押し込み具340では、コイルバネに代えてボールジョイント343により受動屈曲部が構成されている。
次に、本発明の第三実施形態について、図16から図20を参照して説明する。図16は、第三実施形態に係る組織押し込み具340を一部断面で示す図である。組織押し込み具340では、コイルバネに代えてボールジョイント343により受動屈曲部が構成されている。
押し込み部材312の基端部は、ブロック341に回動可能に支持されている。シャフト342の先端部342aは球状に形成されており、ブロック341に形成された凹部341aに嵌め込まれている。すなわち、先端部342aとブロック341により、ボールジョイント343が構成されている。シャフト342と押し込み部材312とは、ボールジョイント343を介して接続されている。
組織押し込み具340の使用時の動作について説明する。押し込み部材312で切除対象組織を押圧すると、押し込み部材312は、切除対象組織から受ける反力によりブロック341に対して受動的に回動し、シャフト342となす角度(シャフト342に対する向き)を変化させる。押し込み部材312がブロック341に対して約90度回動すると、押し込み部材312がブロック341に接触してそれ以上回動しなくなる。すなわち、ブロック341は、押し込み部材312のシャフト342に対する向きの可変範囲を規定するストッパーとして機能する。ボールジョイント343からなる受動屈曲部の動作は、第一実施形態と概ね同様である。
このような構成の本実施形態の組織押し込み具340は、第一実施形態の組織押し込み具310と同様の効果を奏する。
また、押し込み部材312が、ボールジョイント343よりも先端側においてブロック341に回動可能に取り付けられているため、第二ステップを実行する際に、押し込み部材312のシャフト342に対する向きの微調整を行うことができる。さらに、ブロック341がストッパーとして機能するため、押し込み部材312が回動しすぎて操作しにくくなる事態が起きにくい。組織押し込み具340において、ブロック341がストッパーとして機能し始める押し込み部材312の角度は、ブロック341の形状を適宜設定することにより調節することができる。
また、押し込み部材312が、ボールジョイント343よりも先端側においてブロック341に回動可能に取り付けられているため、第二ステップを実行する際に、押し込み部材312のシャフト342に対する向きの微調整を行うことができる。さらに、ブロック341がストッパーとして機能するため、押し込み部材312が回動しすぎて操作しにくくなる事態が起きにくい。組織押し込み具340において、ブロック341がストッパーとして機能し始める押し込み部材312の角度は、ブロック341の形状を適宜設定することにより調節することができる。
図17は、本実施形態の変形例に係る組織押し込み具を一部断面で示す図である。
変形例に係る組織押し込み具350において、押し込み部材312の基端部には、ラチェット351が設けられている。押し込み部材312は、ラチェット351が軸支されることにより回動可能に第一部材352に取り付けられている。
シャフト342の先端部342aは球状に形成されており、第二部材353に嵌め込まれている。先端部342aと第二部材353により、ボールジョイント343が構成されている。第二部材353には、ラチェット351の歯に押し当てられるように付勢されたラチェットピン354が取り付けられている。第一部材352と第二部材353とは、ラチェットピン354を介して、図示しないリンクにより一体に接続されている。
変形例に係る組織押し込み具350において、押し込み部材312の基端部には、ラチェット351が設けられている。押し込み部材312は、ラチェット351が軸支されることにより回動可能に第一部材352に取り付けられている。
シャフト342の先端部342aは球状に形成されており、第二部材353に嵌め込まれている。先端部342aと第二部材353により、ボールジョイント343が構成されている。第二部材353には、ラチェット351の歯に押し当てられるように付勢されたラチェットピン354が取り付けられている。第一部材352と第二部材353とは、ラチェットピン354を介して、図示しないリンクにより一体に接続されている。
組織押し込み具350において、押し込み部材312で切除対象組織を押圧すると、押し込み部材312は、ラチェットピン354に対してラチェット351が回転することに伴い、シャフト342に対する向きを変化させる。すなわち、シャフト342と押し込み部材312とがなす角度は、ラチェット351の歯一つ分ずつ変化し、その角度は押し込み部材312が切除対象組織から離間しても保持される。
ボールジョイント343からなる受動屈曲部の動作は、第一実施形態と概ね同様である。
このような構成の組織押し込み具350は、第一実施形態の組織押し込み具310と同様の効果を奏する。
ボールジョイント343からなる受動屈曲部の動作は、第一実施形態と概ね同様である。
このような構成の組織押し込み具350は、第一実施形態の組織押し込み具310と同様の効果を奏する。
図18は、本実施形態の他の変形例に係る組織押し込み具を示す断面図である。
本変形例の組織押し込み具360においては、押し込み部材312の先端部に牽引部材361が接続されている。シャフト362は、概ねシャフト342と同一の形状であるが、軸線に沿って貫通孔363が形成されている。牽引部材361は、ブロック341内を通り、貫通孔363の先端側開口からシャフト362内に通されている。その他の点は、組織押し込み具340と同様である。なお、牽引部材は必ずしも押し込み部材の先端部に接続されている必要はなく、押し込み部材の回動を発生させる位置であれば良い。例えば、図18の牽引部材361a(点線)のように押し込み部材の一部に接続されていれば良い。
本変形例の組織押し込み具360においては、押し込み部材312の先端部に牽引部材361が接続されている。シャフト362は、概ねシャフト342と同一の形状であるが、軸線に沿って貫通孔363が形成されている。牽引部材361は、ブロック341内を通り、貫通孔363の先端側開口からシャフト362内に通されている。その他の点は、組織押し込み具340と同様である。なお、牽引部材は必ずしも押し込み部材の先端部に接続されている必要はなく、押し込み部材の回動を発生させる位置であれば良い。例えば、図18の牽引部材361a(点線)のように押し込み部材の一部に接続されていれば良い。
このような構成の組織押し込み具360は、第一実施形態の組織押し込み具310と同様の効果を奏する。
また、牽引部材361を牽引することにより、押し込み部材312を回動させて能動的にシャフト362に対する向きの調節を行うことができるため、第二ステップを好適に行うことができる。また、牽引部材361がシャフト362の中心軸に沿って配置されているおり、シャフト先端部の342aにおいて牽引部材361が挿通する穴342bの径に対して、ブロック341において牽引部材361が挿通する穴341bの径は十分大きいため、牽引部材361が牽引されてもボールジョイントの動作にとって大きな妨げになりにくい。
また、牽引部材361を牽引することにより、押し込み部材312を回動させて能動的にシャフト362に対する向きの調節を行うことができるため、第二ステップを好適に行うことができる。また、牽引部材361がシャフト362の中心軸に沿って配置されているおり、シャフト先端部の342aにおいて牽引部材361が挿通する穴342bの径に対して、ブロック341において牽引部材361が挿通する穴341bの径は十分大きいため、牽引部材361が牽引されてもボールジョイントの動作にとって大きな妨げになりにくい。
本実施形態の他の変形例に係る組織押し込み具として、開閉するアームを備えた構成としてもよい。図19は、本変形例に係る組織押し込み具を一部断面で示す図である。図20は、図19の組織押し込み具の使用時の一過程を示す図である。図19に示すように、本変形例の組織押し込み具370は、ブロック341に固定されて、シャフト342と略平行に延びる第一アーム371と、ブロック341に回動可能に取り付けられた第二アーム372とを備えている。第一アーム371と第二アーム372との間には、線状部材373が張り渡されている。
第二アーム372の基端側には牽引部材374が接続され、シャフト342内に通されている。組織押し込み具370において、第二アーム372に接続された牽引部材374をシャフト342の基端側から牽引すると、第二アーム372が回動し、図20に示すように、一対のアーム371、372が略U字状に開いた形状になり、線状部材373にテンションが付与される。
本変形例の組織押し込み具370においては、第一アーム371及び第二アーム372に代えて、上述した第二実施形態のアーム102、103を備えた構成としてもよい。逆に、第二実施形態の組織押し込み具320において、本変形例の第一アーム371及び第二アーム372を備えた構成としてもよい。
本発明の組織押し込み具において、受動屈曲部とは別の部位で押し込み部材とシャフトとの角度を変更可能に構成する場合、受動屈曲部が当該別の部位よりも先に動いてしまうと操作が困難になる可能性がある。したがって、受動屈曲部の動作に必要な力量を別の部位における角度変更に必要な力量より大きく設定するのが好ましい。あるいは、押し込み部材の角度調節が終わるまでは、受動屈曲部を外シース等に収容して屈曲しないように保持しておき、その後外シース等を除去して受動屈曲を生じさせるよう構成してもよい。
以上、本発明の各実施形態について説明したが、本発明の技術範囲は上記実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲において構成要素の組み合わせを変えたり、各構成要素に種々の変更を加えたり、削除したりすることが可能である。
例えば、生分解性材料で形成された線状部材として、ゴムのような伸縮可能な程度の弾性を有するものを用いると、テンションがかかるように組み付けることが容易となり、製造しやすくなる。また、線状部材が張り渡されたアームを開閉するような構造の場合に、線状部材の弛み量を小さくすることができるため、好ましい。
また、本発明の組織押し込み具においては、組織押し込み部が生分解性材料を用いずに形成されていなくてもよい。この場合は、第三ステップを行う前に、組織押し込み部を切除吻合装置から退避させる必要がある。図21は、本発明の変形例に係る組織押し込み具に対応した切除吻合装置の部分拡大図である。図21の例では、切除吻合装置本体231とアンビル部236とに、組織押し込み部の寸法に応じた逃げ部290を設けている。この切除吻合装置を用いる場合は、組織押し込み部を本体及びアンビル部と干渉させずに、本体とアンビル部とで内反された切除対象組織を挟んで十分に保持したところで、組織押し込み部を逃げ部から抜き取り退避させた後第三ステップを行えばよい。
本発明は、体腔内で組織を押し込む際に使用する組織押し込み具に広く適用でき、病変の位置に関係なく好適に組織を押し込むことを可能とする。
10 リニアステープラ
100、110、310、320、330、340、350、360、370 組織押し込み具
101 組織押し込み具本体
102、103、112、113 アーム
104、332、373 線状部材(組織接触部)
114 生分解性部材(組織接触部)
210 切除吻合装置
231 切除吻合装置本体
236 アンビル部
290 逃げ部
311、321、342、362 シャフト
312 押し込み部材(組織押し込み部)
312a 曲げ部
313 コイルバネ(受動屈曲部)
322 ワイヤ
323 組織押し込み部
331 展開バネ
333 プーリ
334 調節筒
334a 貫通孔
335 調節筒の底面
335a 調節筒の底面の孔
336 止め具
337 ネジ
341 ブロック
341a 凹部
341b ブロックの穴
342a シャフトの先端部
342b シャフトの穴
343 ボールジョイント(受動屈曲部)
351 ラチェット
352 第一部材
353 第二部材
354 ラチェットピン
361、361a、374 牽引部材
363 シャフトの貫通孔
371 第一アーム
372 第二アーム
Cl 大腸
Dr1、Dr2 方向
Es 内視鏡
R1 範囲(脾弯曲)
R2 範囲(肝弯曲)
T 切除対象組織
100、110、310、320、330、340、350、360、370 組織押し込み具
101 組織押し込み具本体
102、103、112、113 アーム
104、332、373 線状部材(組織接触部)
114 生分解性部材(組織接触部)
210 切除吻合装置
231 切除吻合装置本体
236 アンビル部
290 逃げ部
311、321、342、362 シャフト
312 押し込み部材(組織押し込み部)
312a 曲げ部
313 コイルバネ(受動屈曲部)
322 ワイヤ
323 組織押し込み部
331 展開バネ
333 プーリ
334 調節筒
334a 貫通孔
335 調節筒の底面
335a 調節筒の底面の孔
336 止め具
337 ネジ
341 ブロック
341a 凹部
341b ブロックの穴
342a シャフトの先端部
342b シャフトの穴
343 ボールジョイント(受動屈曲部)
351 ラチェット
352 第一部材
353 第二部材
354 ラチェットピン
361、361a、374 牽引部材
363 シャフトの貫通孔
371 第一アーム
372 第二アーム
Cl 大腸
Dr1、Dr2 方向
Es 内視鏡
R1 範囲(脾弯曲)
R2 範囲(肝弯曲)
T 切除対象組織
Claims (11)
- 一方向に延びるシャフトと、
組織に押し当てられる組織押し込み部と、
前記組織押し込み部を、前記シャフトの軸線まわりの全方向に屈曲可能に前記シャフトと接続する受動屈曲部と、
を備える組織押し込み具。 - 前記受動屈曲部がボールジョイントからなる、請求項1に記載の組織押し込み具。
- 前記受動屈曲部が弾性体からなる、請求項1に記載の組織押し込み具。
- 前記組織押し込み部は、前記受動屈曲部よりも先端側において前記シャフトに対する向きを変更可能に構成されている、請求項1から3のいずれか一項に記載の組織押し込み具。
- 前記組織押し込み部は、前記受動屈曲部よりも先端側にラチェットを有する、請求項4に記載の組織押し込み具。
- 前記組織押し込み部の前記シャフトに対する向きの可変範囲を規定するストッパーをさらに備える、請求項4または5に記載の組織押し込み具。
- 前記組織押し込み部は、前記シャフトに対する向きを能動的に変更可能に構成されている、請求項4から6のいずれか一項に記載の組織押し込み具。
- 前記組織押し込み部は、先端部に曲面を有する曲げ部を有する、請求項1から7のいずれか一項に記載の組織押し込み具。
- 前記組織押し込み部は、少なくとも前記組織と接触する部位が生分解性材料からなる、請求項1から8のいずれか一項に記載の組織押し込み具。
- 前記組織押し込み部は、前記受動屈曲部に接続された2本のアームと、前記生分解性材料からなり、前記2本のアーム間に張り渡された線状部材とを有する、請求項9に記載の組織押し込み具。
- 前記生分解性材料からなる部位が、伸縮可能な程度の弾性を有する、請求項9または10に記載の組織押し込み具。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017511810A JP6184644B2 (ja) | 2015-04-20 | 2016-04-19 | 組織押し込み具 |
| CN201680022335.0A CN107530068A (zh) | 2015-04-20 | 2016-04-19 | 组织压入用具 |
| EP16783153.6A EP3292824A4 (en) | 2015-04-20 | 2016-04-19 | FABRIC PRESS TOOL |
| US15/673,723 US20170333022A1 (en) | 2015-04-20 | 2017-08-10 | Tissue pressing tool |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015-086247 | 2015-04-20 | ||
| JP2015086247 | 2015-04-20 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US15/673,723 Continuation US20170333022A1 (en) | 2015-04-20 | 2017-08-10 | Tissue pressing tool |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016171132A1 true WO2016171132A1 (ja) | 2016-10-27 |
Family
ID=57143944
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/062388 WO2016171132A1 (ja) | 2015-04-20 | 2016-04-19 | 組織押し込み具 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20170333022A1 (ja) |
| EP (1) | EP3292824A4 (ja) |
| JP (1) | JP6184644B2 (ja) |
| CN (1) | CN107530068A (ja) |
| WO (1) | WO2016171132A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107847255A (zh) | 2015-07-14 | 2018-03-27 | 奥林巴斯株式会社 | 组织缝合系统 |
| WO2022132351A1 (en) * | 2020-12-18 | 2022-06-23 | Gt Metabolic Solutions, Inc. | Devices and methods for assisting magnetic compression anastomosis |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1995007052A1 (en) * | 1993-09-08 | 1995-03-16 | Surgical Innovations Limited | Surgical retractor |
| JP2013248373A (ja) * | 2012-08-28 | 2013-12-12 | Shoichi Nakamura | 医療用器具 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4909789A (en) * | 1986-03-28 | 1990-03-20 | Olympus Optical Co., Ltd. | Observation assisting forceps |
| US5405073A (en) * | 1993-12-06 | 1995-04-11 | Ethicon, Inc. | Flexible support shaft assembly |
| CA2197614C (en) * | 1996-02-20 | 2002-07-02 | Charles S. Taylor | Surgical instruments and procedures for stabilizing the beating heart during coronary artery bypass graft surgery |
| US6290644B1 (en) * | 1996-02-20 | 2001-09-18 | Cardiothoracic Systems, Inc. | Surgical instruments and procedures for stabilizing a localized portion of a beating heart |
| US6063021A (en) * | 1998-07-31 | 2000-05-16 | Pilling Weck Incorporated | Stabilizer for surgery |
| CN2402267Y (zh) * | 1999-12-25 | 2000-10-25 | 于耀宇 | 缓冲式脑压板 |
| US8083664B2 (en) * | 2005-05-25 | 2011-12-27 | Maquet Cardiovascular Llc | Surgical stabilizers and methods for use in reduced-access surgical sites |
| US8579176B2 (en) * | 2005-07-26 | 2013-11-12 | Ethicon Endo-Surgery, Inc. | Surgical stapling and cutting device and method for using the device |
| US8128559B2 (en) * | 2007-11-26 | 2012-03-06 | Ethicon Endo-Surgery, Inc. | Tissue retractors |
| US20100087711A1 (en) * | 2008-10-06 | 2010-04-08 | Gyrus Ent, L.L.C. | Repeatably flexible surgical instrument |
| US9282956B2 (en) * | 2011-09-15 | 2016-03-15 | Boston Scientific Scimed, Inc. | Devices and methods for manipulating bodily tissues |
| JP2014100344A (ja) * | 2012-11-20 | 2014-06-05 | Iwate Medical Univ | 圧排器具 |
| CN203315016U (zh) * | 2013-06-23 | 2013-12-04 | 李明林 | 新型脑压板 |
-
2016
- 2016-04-19 JP JP2017511810A patent/JP6184644B2/ja active Active
- 2016-04-19 WO PCT/JP2016/062388 patent/WO2016171132A1/ja active Application Filing
- 2016-04-19 EP EP16783153.6A patent/EP3292824A4/en not_active Withdrawn
- 2016-04-19 CN CN201680022335.0A patent/CN107530068A/zh active Pending
-
2017
- 2017-08-10 US US15/673,723 patent/US20170333022A1/en not_active Abandoned
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1995007052A1 (en) * | 1993-09-08 | 1995-03-16 | Surgical Innovations Limited | Surgical retractor |
| JP2013248373A (ja) * | 2012-08-28 | 2013-12-12 | Shoichi Nakamura | 医療用器具 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3292824A4 * |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170333022A1 (en) | 2017-11-23 |
| CN107530068A (zh) | 2018-01-02 |
| JPWO2016171132A1 (ja) | 2017-07-13 |
| EP3292824A4 (en) | 2019-05-15 |
| EP3292824A1 (en) | 2018-03-14 |
| JP6184644B2 (ja) | 2017-08-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9706999B2 (en) | Method for tissue resection | |
| US9827002B2 (en) | Tissue removal and closure device | |
| US20110112434A1 (en) | Kits and procedures for natural orifice translumenal endoscopic surgery | |
| JP6470270B2 (ja) | 最小侵襲手術による胃腸治療のためのマルチルーメンカテーテル・リトラクタシステム | |
| EP2630929B1 (en) | Multi-portion wound protector | |
| JP4658557B2 (ja) | 自己配置ファスナーのための単一内腔吻合用アプライヤー | |
| US9168051B2 (en) | Laparoscopic device with three jaws | |
| US9226760B2 (en) | Laparoscopic devices with flexible actuation mechanisms | |
| JP4473115B2 (ja) | 内視鏡的な器官牽引システムおよびその使用方法 | |
| JP4964660B2 (ja) | 三重に曲がる括約筋切開器 | |
| US8361109B2 (en) | Multi-planar obturator with foldable retractor | |
| JP5138270B2 (ja) | 二重に曲がる括約筋切開器 | |
| US20100081883A1 (en) | Methods and devices for performing gastroplasties using a multiple port access device | |
| US20110275901A1 (en) | Laparoscopic devices with articulating end effectors | |
| JP2010082445A (ja) | 胃切除および胃形成を行うための方法および装置 | |
| JP2010240419A (ja) | 組織を切断し締結するための方法及びデバイス | |
| JP2007296350A (ja) | 可撓性のある内視鏡安全針 | |
| KR101685166B1 (ko) | 복강경 수술용 엔도파우치 및 단일공 복강경 수술용 엔도파우치 조립체 | |
| JP6184644B2 (ja) | 組織押し込み具 | |
| WO2009154192A1 (ja) | 管腔壁穿刺用オーバーチューブ | |
| EP1938758B1 (en) | Endoscopic treatment tool | |
| JP2011518026A (ja) | 手術用具に方向性を与えるための方法及び装置 | |
| US11864752B2 (en) | Endoscopic stitching device for supporting suture needles in various orientations | |
| US10595892B2 (en) | Tissue removal system | |
| US20080312495A1 (en) | Method of Performing Transgastric Abdominal Surgery |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16783153 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2017511810 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2016783153 Country of ref document: EP |