WO2016136346A1 - マニピュレータシステム及び医療システム - Google Patents
マニピュレータシステム及び医療システム Download PDFInfo
- Publication number
- WO2016136346A1 WO2016136346A1 PCT/JP2016/051894 JP2016051894W WO2016136346A1 WO 2016136346 A1 WO2016136346 A1 WO 2016136346A1 JP 2016051894 W JP2016051894 W JP 2016051894W WO 2016136346 A1 WO2016136346 A1 WO 2016136346A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- manipulator
- unit
- tap
- detection unit
- tap operation
- Prior art date
Links
Images









Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/35—Surgical robots for telesurgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Master-slave robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J3/00—Manipulators of master-slave type, i.e. both controlling unit and controlled unit perform corresponding spatial movements
- B25J3/04—Manipulators of master-slave type, i.e. both controlling unit and controlled unit perform corresponding spatial movements involving servo mechanisms
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/017—Gesture based interaction, e.g. based on a set of recognized hand gestures
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0346—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of the device orientation or free movement in a 3D space, e.g. 3D mice, 6-DOF [six degrees of freedom] pointers using gyroscopes, accelerometers or tilt-sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2048—Tracking techniques using an accelerometer or inertia sensor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2065—Tracking using image or pattern recognition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/301—Surgical robots for introducing or steering flexible instruments inserted into the body, e.g. catheters or endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
- A61B2034/742—Joysticks
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2200/00—Indexing scheme relating to G06F1/04 - G06F1/32
- G06F2200/16—Indexing scheme relating to G06F1/16 - G06F1/18
- G06F2200/163—Indexing scheme relating to constructional details of the computer
- G06F2200/1636—Sensing arrangement for detection of a tap gesture on the housing
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Robotics (AREA)
- Public Health (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Pathology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Surgical Instruments (AREA)
Abstract
【課題】 小さいスペースで多様な操作を実現可能なマニピュレータシステム及び医療システムを提供する。 【解決手段】 マニピュレータシステム(1)は、操作者が操作する操作部(2)と、操作部(2)によって操作されるマニピュレータ(3)と、操作部(2)の操作に応じてマニピュレータ(3)を制御するシステム制御部(4)と、操作者のタップ操作を検出するタップ操作検出部(22)と、を備え、システム制御部(4)は、タップ操作検出部(22)が検出する情報に応じて制御を切り替えることを特徴とする。
Description
本発明は、外科手術等において患者に挿入され、観察、処置等を行うことのできるマニピュレータシステム及び医療システムに関するものである。
患者の体腔内に処置具を挿入して、処置具先端をワイヤ等で牽引することで、体腔内臓器を観察したり、治療をおこなったりする医療機器が広く用いられている。近年、このような医療機器は、様々な処置を行う必要があるため構造が複雑化及び高度化している。また、構造の複雑化及び高度化に伴い、操作も複雑化及び高度化している。
特許文献1には、ジョイスティック型操作装置、アーム型操作装置、タッチパッド型操作装置、及びフットスイッチ等を用いて、操作性を向上したマニピュレータシステムが記載されている。
しかしながら、操作装置が多くなると、それらを配置するための大きなスペースが必要となり、そのスペースを確保することが困難となっていた。また、例えば、医療行為を行う際には、感染防止等の理由からゴム製の手袋等を着用することになっているが、手袋等を着用した状態で操作装置を操作することは使い勝手が悪かった。
本発明は上記課題に着目してなされたものであり、小さいスペースで多様な操作を実現可能なマニピュレータシステム及び医療システムを提供することにある。
本発明の一実施形態に係るマニピュレータシステムは、
操作者が操作する操作部と、
前記操作部によって操作されるマニピュレータと、
前記操作部の操作に応じて前記マニピュレータを制御するシステム制御部と、
前記操作者のタップ操作を検出するタップ操作検出部と、
を備え、
前記システム制御部は、前記タップ操作検出部が検出する情報に応じて制御を切り替える
ことを特徴とする。
操作者が操作する操作部と、
前記操作部によって操作されるマニピュレータと、
前記操作部の操作に応じて前記マニピュレータを制御するシステム制御部と、
前記操作者のタップ操作を検出するタップ操作検出部と、
を備え、
前記システム制御部は、前記タップ操作検出部が検出する情報に応じて制御を切り替える
ことを特徴とする。
本発明の一実施形態に係るマニピュレータシステムは、
前記タップ操作検出部が検出する情報は、タップ操作の方向、強さ、又は回数を含み、
前記システム制御部は、前記タップ操作検出部が検出する情報に応じて前記情報毎に設定された制御を行う。
前記タップ操作検出部が検出する情報は、タップ操作の方向、強さ、又は回数を含み、
前記システム制御部は、前記タップ操作検出部が検出する情報に応じて前記情報毎に設定された制御を行う。
本発明の一実施形態に係るマニピュレータシステムは、
前記操作部は、前記マニピュレータを連動させるマスターアームを有し、
前記タップ操作検出部は、前記マスターアームに設けられる。
前記操作部は、前記マニピュレータを連動させるマスターアームを有し、
前記タップ操作検出部は、前記マスターアームに設けられる。
本発明の一実施形態に係るマニピュレータシステムは、
前記システム制御部は、前記タップ操作検出部が検出する情報に応じて、前記マニピュレータの作動を断接するクラッチ制御を含む。
前記システム制御部は、前記タップ操作検出部が検出する情報に応じて、前記マニピュレータの作動を断接するクラッチ制御を含む。
本発明の一実施形態に係るマニピュレータシステムを用いた医療システムは、
前記操作部を有し、操作指令を発するためのマスタ入力部と、
スレーブアーム及び前記マニピュレータを含むスレーブマニピュレータと、
を備え、
前記マスターアームの操作に追従させるようにして前記スレーブアームを遠隔制御する
ことを特徴とする。
前記操作部を有し、操作指令を発するためのマスタ入力部と、
スレーブアーム及び前記マニピュレータを含むスレーブマニピュレータと、
を備え、
前記マスターアームの操作に追従させるようにして前記スレーブアームを遠隔制御する
ことを特徴とする。
本発明の一実施形態に係る医療システムは、
前記マニピュレータは、処置具と内視鏡を有し、
前記マスタ入力部は、前記内視鏡が撮像した映像を表示する表示部を有し、
前記システム制御部は、前記タップ操作検出部が検出する情報に応じて、少なくとも前記処置具、前記内視鏡、及び前記表示部の制御を切り替える。
前記マニピュレータは、処置具と内視鏡を有し、
前記マスタ入力部は、前記内視鏡が撮像した映像を表示する表示部を有し、
前記システム制御部は、前記タップ操作検出部が検出する情報に応じて、少なくとも前記処置具、前記内視鏡、及び前記表示部の制御を切り替える。
この態様に係るマニピュレータシステム及び医療システムによれば、小さいスペースで多様な操作を実現することが可能となる。
以下、実施形態について説明する。
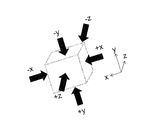
図1は、本実施形態のマニピュレータシステム1を示す。図2は、本実施形態のタップ操作検出部22の一例として用いられる3軸加速度センサを示す。
本実施形態のマニピュレータシステム1は、操作者が操作する操作部2と、操作部2によって操作されるマニピュレータ3と、操作部2の操作に応じてマニピュレータ3を制御するシステム制御部4と、を備える。
操作部2は、操作者が操作するマスターアーム21と、振動又は動きを検出するタップ操作検出部22と、衝撃等を検出する衝撃検出部23と、を有する。マニピュレータ3は、マニピュレータ本体31と、駆動部32と、を有する。
マスターアーム21は、マニピュレータ本体31に対応した形状であって、マニピュレータ本体31の操作及び駆動部32の駆動を指示する。操作者がマスターアーム21を動かすことで、マニピュレータ本体31がマスターアーム21と同様の動きをするようにシステム制御部4が駆動部32を制御する。
タップ操作検出部22は、3軸の動きを検出する3軸加速度センサ又は動きの様子を撮像することで振動の有無を検出する撮像センサ等からなる。例えば、3軸加速度センサの場合、図2に示すように、±x方向、±y方向、及び±z方向の振動を検出することが可能である。
衝撃検出部23は、操作者の肘に対応する位置に配置され、操作者が肘で叩くことで入力を検出する。例えば、1軸加速度センサ又は接触したことを検出するセンサ等でよい。
図3は、本実施形態のマニピュレータシステム1の操作部2の操作の一例を示す。図4は、本実施形態のマニピュレータシステム1の操作部2の操作の他の例を示す。
操作者は、操作部2のマスターアーム21を握り操作する。操作者がマスターアーム21を動かすことで、マニピュレータ本体31がマスターアーム21と同様の動きをする。
本実施形態の操作部2では、この操作とは別に、操作者がマスターアーム21をタップすることによってタップ操作検出部22に振動を与えることで、マニピュレータ本体31の設定変更やモード変換等を行うことができる。
タップ操作検出部22は、図3に示すように、操作者がマスターアーム21を上方から人差し指等でタップした場合、-y方向からの入力を検出する。また、操作者がマスターアーム21を左手や人差し指等で正面からタップした場合、-x方向からの入力を検出する。さらに、操作者がマスターアーム21を親指等で左側面からタップした場合、+z方向からの入力を検出する。
同様に、タップ操作検出部22は、図4に示すように、操作者がマスターアーム21を右側面から人差し指等でタップした場合、-z方向からの入力を検出する。また、操作者がマスターアーム21を下方から中指等でタップした場合、+y方向からの入力を検出する。なお、+x方向のように操作者がマスターアーム21をタップすることが難しい方向の場合には、図1に示した衝撃検出部23を+x方向の入力に割り当てればよい。
なお、タップ操作の方向だけでなく、タップ操作の強さ、回数、又は間隔等によって、マニピュレータ本体31の設定変更やモード変換等を行ってもよい。
次に、本実施形態のマニピュレータシステム1を用いた医療システム10について説明する。
図5は、本実施形態のマニピュレータシステム1を用いた医療システム10を示す。図6は、本実施形態のオーバーチューブ33の先端のマニピュレータ3の構成を示す。
本実施形態の医療システム10は、マスタスレーブ方式が好ましい。医療システム10は、操作部2がマスターアーム21を有し、操作指令を発するためのマスタ入力部5と、スレーブアーム61を有するスレーブマニピュレータ6とを備え、操作者Opによるマスターアーム21の操作に追従させるようにしてスレーブアーム61やマニピュレータ3を遠隔制御するものである。マスターアーム21を介した操作指令は、システム制御部4のマスタ制御部41に送信され、必要に応じて適宜変換処理が施された後、スレーブアーム制御部43やマニピュレータ制御部42に入力される。その後、マニピュレータ制御部42からスレーブマニピュレータ6へ動作信号が送られ、スレーブアーム61やマニピュレータ3が動作する。また、電気メス制御部44は電気メスの出力設定などの制御をおこない、表示部制御部45は内視鏡31cや表示部51の設定変更などの制御をおこなう。これらの制御部は一つの筺体にまとめても良いし、既存の製品を組み合わせるなどして構成しても良い。
図5に示すように、スレーブマニピュレータ6は、患者Pが載置される手術台11に設置されている。スレーブアーム61は複数の多自由度関節を有して構成されており、多軸動作可能である。各多自由度関節は、図示しない動力部によって個別に駆動される。動力部としては、例えばインクリメンタルエンコーダや減速器等を備えたサーボモータ等を用いることができる。
スレーブアーム61の先端部には、患者Pの体内に挿入されて手技を行うマニピュレータ3が取り付けられる。図6に示すように、マニピュレータ3は、処置具31a,31bと内視鏡31cを有し、オーバーチューブ33に挿入される。オーバーチューブ33の先端は、患者Pの体内に挿入される。処置具31a,31bは、手技によって使い分けるため、先端側の処置部の構造や形状が異なる複数種類が用意されており、これをスレーブアーム61の先端部に着脱することで交換したり、オーバーチューブ33に設けられたチャンネル内を挿入・抜去することで交換し、各種手技を行う。内視鏡31cは、患者Pの体内で処置具31a,31bによって手技が行われる手技対象部位を含む術野の映像を取得する。
マスタ入力部5は、操作者Opが操作する複数のマスターアーム21と、内視鏡31cにより取得された映像が表示される表示部51とを備えている。各マスターアーム21は、多軸動作可能な公知の構成を有し、操作者Opに近い先端側に、術者が把持して操作指令を発する。
本実施形態の挿入部分は、可撓性を有する長尺のオーバーチューブ33と、オーバーチューブ33のマニピュレータ挿入孔に挿入される処置具31a,31b及び内視鏡31cを有する。なお、処置具31a,31b及び内視鏡31cは、本実施形態のマニピュレータシステム1に適用可能な構造である。
本実施形態のマニピュレータ3は、第1処置具31aと第2処置具31bを有し、エンドエフェクタとして、第1処置具31aは電気メスを有し、第2処置具31bは把持部を有する。マニピュレータ3の先端側は、オーバーチューブ33から突出可能であって、それぞれ複数の節輪を軸線方向に並べて配置された湾曲部で構成される。最も先端側の節輪には、湾曲部を駆動するための操作ワイヤの両端部が固定されており、操作ワイヤを駆動することで湾曲部を湾曲させることができる。また、軸方向に回転させることも可能である。同様に、オーバーチューブ33自体も湾曲及び軸方向に回転可能であることが好ましい。
本実施形態の医療システム10は、操作部2のマスターアーム21によって、スレーブアーム61及びマニピュレータ3等を制御することができる。本実施形態のマスターアーム21には、図1に記載されたタップ操作検出部22が設けられており、操作者Opがマスターアーム21をタップすることによって、スレーブアーム61、マニピュレータ3、第1処置具31aの電気メス、又は表示部51等を制御する制御モードにそれぞれ切り替えることが可能となっている。例えば、+y方向にタップした場合、スレーブアーム61を制御するモード、-y方向にタップした場合、マニピュレータ3を制御するモード等に切り替える。表示部51には、モードに応じた情報が表示されることが好ましい。なお、タップ操作検出部22は、スレーブアーム61等に設けてもよく、第2の操作者Oaが操作してもよい。
図7は、本実施形態の医療システムのタップ制御フローチャートを示す。
まず、ステップ1で、タップ操作モードか否かを判定する(ST1)。
ステップ1において、タップ操作モードの場合、ステップ2で、タップ操作モードのサブルーチンに進む(ST2)。タップ操作モードのサブルーチンについては後述する。ステップ1において、タップ操作モードでない場合、ステップ3に進む。
次に、ステップ3で、マニピュレータシステム1が動作中か否かを判定する(ST3)。ステップ3において、マニピュレータシステム1が動作中でない場合、ステップ1に戻る。ステップ3において、マニピュレータシステム1が動作中である場合、ステップ4で、マスタスレーブ操作を行う(ST4)。
図8は、本実施形態の医療システムのタップ操作モードの制御フローチャートの一例を示す。
図7に示したステップ2において、タップ操作モードのサブルーチンに進むと、まず、ステップ11で、タップの方向が±z方向か否かを判定する(ST11)。ステップ11において、タップの方向が-z方向の場合、ステップ12で、処置具の断接を行う処置用のクラッチモードに移行し(ST12)、その後ステップ11に戻る。ステップ11において、タップの方向が+z方向の場合、ステップ13で、内視鏡のズーム操作を行う観察用のズームモードに移行し(ST13)、その後ステップ11に戻る。。
ステップ11において、タップの方向が±z方向でない場合、ステップ14で、タップの方向が±x方向か否かを判定する(ST14)。ステップ14において、タップの方向が-x方向の場合、ステップ15で、マスターアームとスレーブアームの動作比率を変更するスケーリング機能を選定する処置用のスケーリングモードに移行し(ST15)、その後ステップ11に戻る。ステップ14において、タップの方向が+x方向の場合、ステップ16で、照明光を選定する観察用の特殊光モードに移行し(ST16)、その後ステップ11に戻る。
ステップ14において、タップの方向が±x方向でない場合、ステップ17で、タップの方向が±y方向か否かを判定する(ST17)。ステップ17において、タップの方向が-y方向の場合、ステップ18で、電気メスなどのエナジー処置具用の出力などを設定する焼灼・切開モードに移行し(ST18)、その後ステップ11に戻る。ステップ17において、タップの方向が+y方向の場合、ステップ19で、モード解除し(ST19)、図7に示した制御フローに戻る。ステップ17において、タップの方向が±y方向でない場合、ステップ11に戻る。
なお、図8に示した本実施形態の医療システムの各モードは、この例に限らず、他のモードを用いてもよい。
このように、本実施形態の医療システムでは、タップ操作によって容易に各モードに移行することが可能となる。
次に、モード内での制御について説明する。本実施形態では、一例としてクラッチモードを説明する。
図9は、クラッチモードの制御フローチャートの一例を示す。
クラッチモードでは、まず、ステップ21で、タップの方向が±x方向か否かを判定する(ST21)。ステップ21において、タップの方向が-x方向の場合、ステップ22で、前の選択項目に移動させ(ST22)、その後ステップ21に戻る。ステップ21において、タップの方向が+x方向の場合、ステップ23で、次の選択項目に移動させ(ST23)、その後ステップ21に戻る。
図10は、クラッチモードのモード遷移の一例を示す。
クラッチモードでは、例えば、マスターアーム21を±x方向にタップすることによって断接する部分の選択が順次切り替わる。一例として図10に示すように、タップする毎に処置具及び内視鏡の断接を選択することができる。現段階で内視鏡が制御可能なONに選択されている場合、マスターアーム21の+x方向にタップが検出されると、右腕用と左腕用の処置具が制御可能なONに選択される。また、マスターアーム21の-x方向にタップが検出されると、左腕用の処置具が制御可能なONに選択される。
ステップ21において、タップの方向が±x方向でない場合、ステップ24で、タップの方向が±y方向か否かを判定する(ST24)。
ステップ24において、タップの方向が-y方向の場合、ステップ25で、選択した項目を決定する(ST25)。その後、図8に示したステップ11に戻る。ステップ24において、タップの方向が+y方向の場合、ステップ26で、選択した項目をキャンセルする(ST26)。その後、図8に示したステップ11に戻る。
ステップ24において、タップの方向が-y方向の場合、ステップ25で、選択した項目を決定する(ST25)。その後、図8に示したステップ11に戻る。ステップ24において、タップの方向が+y方向の場合、ステップ26で、選択した項目をキャンセルする(ST26)。その後、図8に示したステップ11に戻る。
なお、他のモードであっても図9に示すようなフローで制御すればよい。その際、タップ操作の判定基準は異なるものであってもよい。例えば、本実施形態では、タップ操作の方向で判定したが、タップ操作の回数又は強さ等であってもよい。また、図10のモード内での遷移は、それぞれのモードで設定すればよい。
このように、本実施形態の医療システムでは、操作者のタップ操作によって容易に各モード内での選択操作を行うことが可能となる。
以上、本実施形態のマニピュレータシステム1によれば、操作者が操作する操作部2と、操作部2によって操作されるマニピュレータ3と、操作部2の操作に応じてマニピュレータ3を制御するシステム制御部4と、操作者のタップ操作を検出するタップ操作検出部22,23と、を備え、システム制御部4は、タップ操作検出部22が検出する情報に応じて制御を切り替えるので、小さいスペースで多様な操作を実現することが可能となる。
また、本実施形態のマニピュレータシステム1によれば、タップ操作検出部22が検出する情報は、タップ操作の方向、強さ、又は回数を含み、システム制御部4は、タップ操作検出部22,23が検出する情報に応じて情報毎に設定された制御を行うので、操作者のタップ操作によって容易に制御を行うことができ、操作性を向上させることが可能となる。
また、本実施形態のマニピュレータシステム1によれば、操作部2は、マニピュレータ3を連動させるマスターアーム21を有し、タップ操作検出部22は、マスターアーム21に設けられるので、より操作性を向上させることが可能となる。
また、本実施形態のマニピュレータシステム1によれば、システム制御部4は、タップ操作検出部22が検出する情報に応じて、マニピュレータ3の作動を断接するクラッチ制御を含むので、緊急時に迅速にマニピュレータ3の作動を止めることが可能となる。
さらに、本実施形態に係るマニピュレータシステム1を用いた医療システム10によれば、操作部2を有し、操作指令を発するためのマスタ入力部5と、スレーブアーム61及びマニピュレータ3を含むスレーブマニピュレータ6と、を備え、マスターアーム21の操作に追従させるようにしてスレーブアーム61を遠隔制御するので、より多様な操作を実現することが可能となる。スレーブアーム61の位置決め時の速度設定などを第2の操作者Oaがタップ操作することも可能であり、手術前の設置位置決めや、手術中の患者体位変換に伴う設置位置変更なども容易となる。
また、本実施形態に係る医療システム10によれば、マニピュレータ3は、処置具31a,31bと内視鏡31cを有し、マスタ入力部5は、内視鏡31cが撮像した映像を表示する表示部51を有し、システム制御部4は、タップ操作検出部22,23が検出する情報に応じて、少なくとも処置具31a,31b、内視鏡31c、及び表示部51の制御を切り替えるので、操作者のタップ操作によって容易に選択操作を行うことが可能となる。
なお、この実施形態によって本発明は限定されるものではない。すなわち、実施形態の説明に当たって、例示のために特定の詳細な内容が多く含まれるが、当業者であれば、これらの詳細な内容に色々なバリエーションや変更を加えても、本発明の範囲を超えないことは理解できよう。従って、本発明の例示的な実施形態は、権利請求された発明に対して、一般性を失わせることなく、また、何ら限定をすることもなく、述べられたものである。
1…マニピュレータシステム
10…医療システム
2…操作部
21…マスターアーム
22…タップ操作検出部
23…衝撃検出部(タップ操作検出部)
3…マニピュレータ
31…マニピュレータ本体
32…駆動部
4…システム制御部
5…マスタ入力部
6…スレーブマニピュレータ
61…スレーブアーム
10…医療システム
2…操作部
21…マスターアーム
22…タップ操作検出部
23…衝撃検出部(タップ操作検出部)
3…マニピュレータ
31…マニピュレータ本体
32…駆動部
4…システム制御部
5…マスタ入力部
6…スレーブマニピュレータ
61…スレーブアーム
Claims (6)
- 操作者が操作する操作部と、
前記操作部によって操作されるマニピュレータと、
前記操作部の操作に応じて前記マニピュレータを制御するシステム制御部と、
前記操作者のタップ操作を検出するタップ操作検出部と、
を備え、
前記システム制御部は、前記タップ操作検出部が検出する情報に応じて制御を切り替える
ことを特徴とするマニピュレータシステム。 - 前記タップ操作検出部が検出する情報は、タップ操作の方向、強さ、又は回数を含み、
前記システム制御部は、前記タップ操作検出部が検出する情報に応じて前記情報毎に設定された制御を行う
請求項1に記載のマニピュレータシステム。 - 前記操作部は、前記マニピュレータを連動させるマスターアームを有し、
前記タップ操作検出部は、前記マスターアームに設けられる
請求項1又は2に記載のマニピュレータシステム。 - 前記システム制御部は、前記タップ操作検出部が検出する情報に応じて、前記マニピュレータの作動を断接するクラッチ制御を含む
請求項1乃至3のいずれか1つに記載のマニピュレータシステム。 - 前記操作部を有し、操作指令を発するためのマスタ入力部と、
スレーブアーム及び前記マニピュレータを含むスレーブマニピュレータと、
を備え、
前記マスターアームの操作に追従させるようにして前記スレーブアームを遠隔制御する
ことを特徴とする請求項1乃至4のいずれか1つに記載のマニピュレータシステムを用いた医療システム。 - 前記マニピュレータは、処置具と内視鏡を有し、
前記マスタ入力部は、前記内視鏡が撮像した映像を表示する表示部を有し、
前記システム制御部は、前記タップ操作検出部が検出する情報に応じて、少なくとも前記処置具、前記内視鏡、及び前記表示部の制御を切り替える
請求項5に記載の医療システム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016553036A JP6084344B2 (ja) | 2015-02-25 | 2016-01-22 | マニピュレータシステム及び医療システム |
| EP16755096.1A EP3263290A4 (en) | 2015-02-25 | 2016-01-22 | Manipulator system and medical system |
| CN201680003237.2A CN107073704A (zh) | 2015-02-25 | 2016-01-22 | 机械手系统和医疗系统 |
| US15/590,289 US9974620B2 (en) | 2015-02-25 | 2017-05-09 | Manipulator system, and medical system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015-034815 | 2015-02-25 | ||
| JP2015034815 | 2015-02-25 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US15/590,289 Continuation US9974620B2 (en) | 2015-02-25 | 2017-05-09 | Manipulator system, and medical system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016136346A1 true WO2016136346A1 (ja) | 2016-09-01 |
Family
ID=56788336
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/051894 WO2016136346A1 (ja) | 2015-02-25 | 2016-01-22 | マニピュレータシステム及び医療システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9974620B2 (ja) |
| EP (1) | EP3263290A4 (ja) |
| JP (1) | JP6084344B2 (ja) |
| CN (1) | CN107073704A (ja) |
| WO (1) | WO2016136346A1 (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102020393B1 (ko) * | 2017-08-23 | 2019-09-11 | 한국기계연구원 | 원격 초음파 진단시스템 |
| KR20210010871A (ko) | 2018-05-18 | 2021-01-28 | 아우리스 헬스, 인코포레이티드 | 로봇식 원격작동 시스템을 위한 제어기 |
| US11135030B2 (en) * | 2018-06-15 | 2021-10-05 | Verb Surgical Inc. | User interface device having finger clutch |
| CN111374767A (zh) * | 2018-12-27 | 2020-07-07 | 苏州汇控智能技术有限公司 | 医疗内窥镜智能机器人系统及内窥镜的控制方法 |
| CN115379811A (zh) | 2020-03-27 | 2022-11-22 | 奥瑞斯健康公司 | 用于机器人系统的手动输入装置 |
| CN112259192A (zh) * | 2020-10-22 | 2021-01-22 | 华志微创医疗科技(北京)有限公司 | 一种手术操作系统以及控制方法 |
| CN112568998B (zh) * | 2020-12-08 | 2022-08-05 | 北京天使之手机器人科技有限公司 | 一种远程主从交互式医疗系统及方法 |
| CN112959327B (zh) * | 2021-03-31 | 2022-07-29 | 上海电气集团股份有限公司 | 机器人运动控制方法、系统、电子设备及存储介质 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05261691A (ja) * | 1992-03-18 | 1993-10-12 | Fujitsu Ltd | 冗長マニピュレータ制御方式 |
| JP2008228967A (ja) * | 2007-03-20 | 2008-10-02 | Hitachi Ltd | マスタ・スレーブ式マニピュレータシステム |
| JP2014184494A (ja) * | 2013-03-21 | 2014-10-02 | Tsubakimoto Chain Co | マニピュレータ装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8398541B2 (en) * | 2006-06-06 | 2013-03-19 | Intuitive Surgical Operations, Inc. | Interactive user interfaces for robotic minimally invasive surgical systems |
| US20070257881A1 (en) * | 2006-05-08 | 2007-11-08 | Marja-Leena Nurmela | Music player and method |
| US9211160B2 (en) * | 2008-01-16 | 2015-12-15 | Luiz Geraldo Pivotto | Remotely controlled catheter insertion system with automatic control system |
| JP5192898B2 (ja) | 2008-04-25 | 2013-05-08 | オリンパスメディカルシステムズ株式会社 | マニピュレータシステム |
| US20100134327A1 (en) * | 2008-11-28 | 2010-06-03 | Dinh Vincent Vinh | Wireless haptic glove for language and information transference |
| US9439736B2 (en) * | 2009-07-22 | 2016-09-13 | St. Jude Medical, Atrial Fibrillation Division, Inc. | System and method for controlling a remote medical device guidance system in three-dimensions using gestures |
| US8521331B2 (en) * | 2009-11-13 | 2013-08-27 | Intuitive Surgical Operations, Inc. | Patient-side surgeon interface for a minimally invasive, teleoperated surgical instrument |
| US8682489B2 (en) * | 2009-11-13 | 2014-03-25 | Intuitive Sugical Operations, Inc. | Method and system for hand control of a teleoperated minimally invasive slave surgical instrument |
| WO2014144015A2 (en) * | 2013-03-15 | 2014-09-18 | Keller Eric Jeffrey | Computing interface system |
| JP5632040B2 (ja) * | 2013-05-17 | 2014-11-26 | オリンパスイメージング株式会社 | 撮像装置およびそのモード切換え方法 |
-
2016
- 2016-01-22 WO PCT/JP2016/051894 patent/WO2016136346A1/ja active Application Filing
- 2016-01-22 JP JP2016553036A patent/JP6084344B2/ja not_active Expired - Fee Related
- 2016-01-22 CN CN201680003237.2A patent/CN107073704A/zh active Pending
- 2016-01-22 EP EP16755096.1A patent/EP3263290A4/en not_active Withdrawn
-
2017
- 2017-05-09 US US15/590,289 patent/US9974620B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05261691A (ja) * | 1992-03-18 | 1993-10-12 | Fujitsu Ltd | 冗長マニピュレータ制御方式 |
| JP2008228967A (ja) * | 2007-03-20 | 2008-10-02 | Hitachi Ltd | マスタ・スレーブ式マニピュレータシステム |
| JP2014184494A (ja) * | 2013-03-21 | 2014-10-02 | Tsubakimoto Chain Co | マニピュレータ装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3263290A4 * |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170239008A1 (en) | 2017-08-24 |
| EP3263290A1 (en) | 2018-01-03 |
| EP3263290A4 (en) | 2018-11-21 |
| JPWO2016136346A1 (ja) | 2017-04-27 |
| CN107073704A (zh) | 2017-08-18 |
| US9974620B2 (en) | 2018-05-22 |
| JP6084344B2 (ja) | 2017-02-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6084344B2 (ja) | マニピュレータシステム及び医療システム | |
| JP7039497B2 (ja) | 手術用器具を制御するためのシステム及び方法 | |
| EP3025671B1 (en) | Medical system | |
| JP5744455B2 (ja) | マスタ・スレーブ方式マニピュレータの制御装置及びその制御方法 | |
| EP2550926A1 (en) | Medical manipulator system | |
| CN102665590A (zh) | 用于内窥镜辅助机器人的人-机器人共享控制 | |
| JP2021511087A (ja) | 制御可能な操縦可能器具 | |
| JP2008228967A (ja) | マスタ・スレーブ式マニピュレータシステム | |
| JP5865500B2 (ja) | 医療用マニピュレータ | |
| US10660720B2 (en) | Surgical-manipulator operating device and surgical-manipulator system | |
| JPWO2014156250A1 (ja) | マスタスレーブシステム | |
| JP6033512B1 (ja) | マニピュレータシステム | |
| JP5959722B2 (ja) | 処置具交換装置及び医療システム | |
| WO2015129644A1 (ja) | 手術用マニピュレータシステム | |
| JPWO2017109900A1 (ja) | チャネルシース及び医療システム | |
| KR20140121933A (ko) | 수술 로봇 | |
| KR20200030209A (ko) | 탈부착형 로봇 수술 도구를 이용한 다자유도 복강경 수술 장치 | |
| US11399910B2 (en) | Medical system | |
| KR101063281B1 (ko) | 싱글 포트 수술용 어댑터 | |
| WO2015012022A1 (ja) | 医療用マスタースレーブシステムの制御方法 | |
| JP2013017512A (ja) | 医療用マスタスレーブマニピュレータ | |
| CN117426876A (zh) | 医疗设备及调整医疗设备的主从姿态关系的方法 | |
| JPWO2020141487A5 (ja) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| ENP | Entry into the national phase |
Ref document number: 2016553036 Country of ref document: JP Kind code of ref document: A |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16755096 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| REEP | Request for entry into the european phase |
Ref document number: 2016755096 Country of ref document: EP |