WO2016088662A1 - 電動ウインチ装置及び移動式クレーン - Google Patents
電動ウインチ装置及び移動式クレーン Download PDFInfo
- Publication number
- WO2016088662A1 WO2016088662A1 PCT/JP2015/083341 JP2015083341W WO2016088662A1 WO 2016088662 A1 WO2016088662 A1 WO 2016088662A1 JP 2015083341 W JP2015083341 W JP 2015083341W WO 2016088662 A1 WO2016088662 A1 WO 2016088662A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- drum
- electric
- winch
- winch drum
- torque
- Prior art date
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D1/00—Rope, cable, or chain winding mechanisms; Capstans
- B66D1/02—Driving gear
- B66D1/12—Driving gear incorporating electric motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D1/00—Rope, cable, or chain winding mechanisms; Capstans
- B66D1/02—Driving gear
- B66D1/14—Power transmissions between power sources and drums or barrels
- B66D1/16—Power transmissions between power sources and drums or barrels the drums or barrels being freely rotatable, e.g. having a clutch activated independently of a brake
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H1/00—Toothed gearings for conveying rotary motion
- F16H1/02—Toothed gearings for conveying rotary motion without gears having orbital motion
- F16H1/20—Toothed gearings for conveying rotary motion without gears having orbital motion involving more than two intermeshing members
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H1/00—Toothed gearings for conveying rotary motion
- F16H1/02—Toothed gearings for conveying rotary motion without gears having orbital motion
- F16H1/20—Toothed gearings for conveying rotary motion without gears having orbital motion involving more than two intermeshing members
- F16H1/22—Toothed gearings for conveying rotary motion without gears having orbital motion involving more than two intermeshing members with a plurality of driving or driven shafts; with arrangements for dividing torque between two or more intermediate shafts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/18—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes
- B66C23/36—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes specially adapted for use in particular purposes mounted on road or rail vehicles; Manually-movable jib-cranes for use in workshops; Floating cranes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C2700/00—Cranes
- B66C2700/03—Cranes with arms or jibs; Multiple cranes
- B66C2700/0321—Travelling cranes
- B66C2700/0357—Cranes on road or off-road vehicles, on trailers or towed vehicles; Cranes on wheels or crane-trucks
- B66C2700/0364—Cranes on road or off-road vehicles, on trailers or towed vehicles; Cranes on wheels or crane-trucks with a slewing arm
- B66C2700/0371—Cranes on road or off-road vehicles, on trailers or towed vehicles; Cranes on wheels or crane-trucks with a slewing arm on a turntable
Definitions
- the present invention relates to an electric winch device and a mobile crane.
- a mobile crane is equipped with a winch device that is driven by a hydraulic actuator such as a hydraulic motor, and the winch device performs lifting work such as lifting and lowering a suspended load.
- Patent Document 1 discloses a climbing crane that is an example of a tower crane.
- the climbing crane disclosed in Patent Document 1 includes an electric winch device having a winch drum and two electric motors that rotationally drive the winch drum.
- this electric winch device in order to prevent local twisting of the input shaft of the winch drum or the winch drum itself, two electric motors are arranged separately on both sides in the axial direction of the winch drum, and the electric motors from both sides are arranged. Torque is input to the winch drum.
- the winch device is mounted on the upper swing body, and the upper swing body is limited in size when it is transported and when the mobile crane runs on a public road.
- the upper swing body is loaded and transported on a transport vehicle such as a trailer.
- the upper swing body is generally in the width direction of the transport vehicle. Loaded to match. Since the transport vehicle travels on public roads, it is necessary to clear the vehicle width restriction stipulated by laws and regulations, and accordingly, the width of the upper turning body is restricted based on the vehicle width restriction.
- the winch device is mounted on the upper swing body so that the axial direction of the winch drum coincides with the width direction of the upper swing body.
- two electric motors are provided in the axial direction of the winch drum. Since the size of the electric winch device in the axial direction of the winch drum increases, the electric winch device is mounted on the upper swing body due to the above-described width limitation of the upper swing body. It becomes difficult.
- the mobile crane when the mobile crane is traveling on a public road, the mobile crane itself must clear the vehicle width limit.
- the upper swing body is arranged so that its width direction matches the vehicle width direction of the mobile crane. Subject to constraints based on Therefore, also in this case, it is difficult to mount the electric winch device of Patent Document 1 on the upper swing body.
- An object of the present invention is to provide an electric winch device and a mobile crane capable of clearing the restrictions on the dimensions of the mobile crane while ensuring a large suspension capacity.
- An electric winch device is mounted on a mobile crane provided with an operation part for suspension work, and is used for suspension work on the operation part by winding or unwinding a rope connected to the operation part.
- An electric winch device for performing the operation of the winch drum which has a central axis and is provided on the mobile crane so as to be rotatable about the central axis, and on which the rope is wound, and the winch
- a plurality of electric motors arranged on one side of the winch drum in an axial direction in which the central axis of the drum extends, and arranged in a direction perpendicular to the axial direction of the winch drum, and output from each of the plurality of electric motors
- a gear mechanism for synthesizing torque to be transmitted, and the torque synthesized by the gear mechanism is transmitted to the winch drum to rotate the winch drum.
- Te and a transfer unit to perform the winding or unwinding of the rope to the winch drum.
- the mobile crane according to another aspect of the present invention includes the electric winch device according to the one aspect.
- FIG. 1 is a schematic side view of a mobile crane on which an electric winch device for hoisting according to a first embodiment of the present invention is mounted. It is the schematic of the electric winch apparatus in the state in which the electric winch apparatus by 1st Embodiment was installed on the turning frame. It is the schematic perspective view which looked at the electric winch apparatus by 1st Embodiment from the side by which the electric motor and the gear mechanism were arrange
- FIG. 3 is a view corresponding to FIG. 2 of an electric winch device according to a second embodiment of the present invention.
- FIG. 3 is a view corresponding to FIG. 2 of an electric winch device according to a modification of the present invention.
- FIG. 8 is a view corresponding to FIG. 3 of the electric winch device according to the modification shown in FIG. 7.
- FIG. 6 is a view corresponding to FIG. 3 of an electric winch device according to another modification of the present invention.
- FIG. 6 is a view corresponding to FIG. 2 of an electric winch device according to still another modified example of the present invention.
- FIG. 6 is a view corresponding to FIG. 2 of an electric winch device according to still another modified example of the present invention.
- It is a schematic diagram of the mobile crane carrying the electric winch device for hoisting by the modification of this invention.
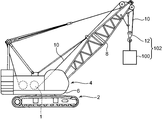
- a mobile crane provided with the electric winch device 1 according to the first embodiment is, for example, a crane as shown in FIG.
- This mobile crane is a crawler crane.
- This mobile crane includes a crawler-type self-propelled lower traveling body 2 and an upper revolving body 4 mounted on the lower traveling body 2.
- the upper turning body 4 includes a turning frame 6, a boom 8, and a hook device 12.
- the turning frame 6 is mounted on the lower traveling body 2 so as to be turnable around the vertical axis.
- the boom 8 is attached to the front part of the revolving frame 6 so that it can be raised and lowered.
- the hook device 12 is suspended from the tip of the boom 8 via a suspension rope 10 that is a wire rope and suspends a suspended load 100.
- the hook device 12 is an example of an operating part for a hanging operation in the present invention.
- the hook device 12 and the suspended load 100 suspended by the hook device 12 are collectively referred to as an object 102 to be rolled up / down.
- front and “rear” mean “front” and “rear” of the upper swing body 4 or the swing frame 6.
- the front side of the upper swing body 4 corresponds to the side on which the boom 8 is provided
- the rear side of the upper swing body 4 corresponds to the side opposite to the side on which the boom 8 is provided.
- the width direction of the upper swing body 4 corresponds to a direction orthogonal to both the front-rear direction and the swing axis direction of the upper swing body 4.
- a first support portion 14 and a second support portion 16 for supporting a winch drum 20 described later are provided on the revolving frame 6.
- the first support part 14 and the second support part 16 are provided at an intermediate position in the front-rear direction of the revolving frame 6, and are arranged behind the attachment site of the boom 8 (see FIG. 1) in the revolving frame 6.
- the first support portion 14 and the second support portion 16 are opposed to each other in the width direction of the swivel frame 6 and are disposed with an interval in the width direction.
- the first support portion 14 includes a first support base 14a fixed on the revolving frame 6 and a first bearing 14b supported by the first support base 14a.
- the second support portion 16 includes a second support base 16a fixed on the revolving frame 6 and a second bearing 16b supported by the second support base 16a.
- the electric winch device 1 is mounted on the upper swing body 4 (see FIG. 1).
- the electric winch device 1 is disposed behind the attachment portion of the boom 8 in the revolving frame 6.
- the electric winch device 1 is a winch device for hoisting that causes the hook device 12 to move up and down for the lifting work by winding or unwinding the hanging rope 10 connected to the hook device 12.
- the electric winch device 1 includes a winch drum 20 (hereinafter simply referred to as the drum 20), a first electric motor 22, a second electric motor 24, a gear mechanism 26, and a transmission unit 28.
- a first brake device 30 and a second brake device 32 are examples of the drum 20.
- the drum 20 is wound with the suspension rope 10 and is rotated to wind / unwind the suspension rope 10, thereby winding / unwinding the hook device 12 (see FIG. 1). That is, the drum 20 rotates and winds / unwinds the suspension rope 10, thereby winding / unwinding the object 102.
- the drum 20 has a central axis 20 a that is the rotation center of the drum 20, and the axial direction of the drum 20, which is the direction in which the central axis 20 a extends, matches the width direction of the upper swing body 4. It is supported by the 1 support part 14 and the 2nd support part 16, and is installed on the turning frame 6 by it.
- the drum 20 includes a drum body 40, a first shaft 41, and a second shaft 42.
- the drum body 40 and the hanging rope 10 are represented by a cross section along the axial direction of the drum body 40 in order to show the internal configuration of the drum body 40.
- the drum body 40 is a portion around which the suspension rope 10 is wound.
- the suspension rope 10 is pulled out from the drum body 40 and passes through the tip of the boom 8 (see FIG. 1), and is suspended from the tip of the boom 8 to suspend the hook device 12.
- the drum body 40 is formed in a cylindrical shape with hooks at both ends in the axial direction.
- the central axis 20 a corresponds to the central axis of the cylindrical drum body 30.
- the drum body 40 has a space inside.
- the first shaft 41 (see FIG. 2) is fixedly provided at one end of the drum main body 40 in the axial direction, so that it can rotate integrally with the drum main body 40.
- the first shaft 41 extends from one end of the drum body 40 in the axial direction to the outside of the drum body 40 and is disposed coaxially with the drum body 40.
- the second shaft 42 (see FIG. 2) is fixedly provided at the other end of the drum body 40 in the axial direction, and can thereby rotate integrally with the drum body 40.
- the second shaft 42 extends from the other axial end of the drum body 40 to the outside of the drum body 40 and is disposed coaxially with the drum body 40.
- the drum 20 is provided on the upper swing body 4 of the mobile crane so as to be rotatable around the central axis 20 a of the drum 20 extending in the width direction of the upper swing body 4.
- the drum 20 is wound in the winding direction which is one of the rotation directions, thereby winding the suspension rope 10 around the drum body 40, thereby winding up the hook device 12 (see FIG. 1) and winding up the object 102.
- the drum 20 is rotated in the lowering direction which is the rotation direction opposite to the hoisting direction, thereby feeding the hanging rope 10, thereby lowering the hook device 12 and lowering the object 102.
- the first electric motor 22 and the second electric motor 24 operate when electric power is supplied, and output torque for rotating the drum 20 in the hoisting direction when the object 102 is hoisted.
- the first and second electric motors 22 and 24 are both disposed on one side of the drum 20 in the axial direction of the drum 20 on the upper swing body 4 of the mobile crane.
- the first and second electric motors 22 and 24 are disposed on the opposite side of the drum main body 40 with the first support portion 14 in between in the axial direction of the drum 20.
- the first motor 22 has a first motor body 22a and a first drive shaft 22b.
- the first electric motor main body 22a is a drive device that operates by being supplied with electric power and rotates the first drive shaft 22b around its axis. That is, the first drive shaft 22b rotates when the first electric motor main body 22a operates.
- the first drive shaft 22b corresponds to an output shaft for torque generated by the first electric motor main body 22a. That is, the first drive shaft 22 b corresponds to the torque output shaft of the first electric motor 22.
- the first electric motor 22 is installed in a posture in which the first drive shaft 22b extends in the axial direction of the drum 20 by the first electric motor main body 22a being supported by an electric motor support portion (not shown) installed on the revolving frame 6. ing.
- the first drive shaft 22b has a protruding portion 22c (see FIG. 2) that extends from the first electric motor main body 22a to the first support portion 14 side.
- the first drive shaft 22 b is connected to the gear
- the second electric motor 24 has a second electric motor main body 24a and a second drive shaft 24b.
- the second electric motor main body 24a is a drive device that operates by being supplied with electric power and rotates the second drive shaft 24b about its axis. That is, the second drive shaft 24b rotates when the second electric motor main body 24a operates.
- the second drive shaft 24b corresponds to an output shaft for torque generated by the second electric motor main body 24a. That is, the second drive shaft 24 b corresponds to the torque output shaft of the second electric motor 24.
- the second electric motor 24 is installed in a posture in which the second drive shaft 24 b extends in the axial direction of the drum 20 by the second electric motor main body 24 a being supported by an electric motor support portion (not shown) installed on the revolving frame 6. ing.
- the second electric motor 24 is arranged side by side with the first electric motor 22 in a direction orthogonal to the axial direction of the drum 20 so that the second driving shaft 24b is parallel to the first driving shaft 22b.
- the second drive shaft 24b has a protruding portion 24c (see FIG. 2) that extends from the second electric motor main body 24a to the first support portion 14 side.
- the gear mechanism 26 synthesizes the torque output from the first electric motor 22 and the torque output from the second electric motor 24. That is, the gear mechanism 26 combines the torque of the first drive shaft 22b and the torque of the second drive shaft 24b.
- the gear mechanism 26 is disposed between the first and second electric motors 22 and 24 and the first support portion 14. In other words, the gear mechanism 26 is disposed on the opposite side of the drum main body 40 with the first support portion 14 interposed therebetween in the axial direction of the drum 20.
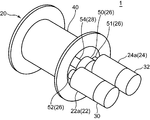
- the gear mechanism 26 has a center gear 50, a first gear 51, and a second gear 52, as shown in FIGS.
- These gears 50, 51, and 52 are all external gears. 2 and 3, the gears 50, 51, and 52 are schematically shown, and the external teeth of those gears are not shown.
- FIG. 3 in order to clearly show the arrangement of the first gear 51 and the second gear 52 with respect to the center gear 50 and a transmission shaft 54 to be described later coupled to the center gear 50, The illustration of the one bearing 14b and the like is omitted. The same applies to FIGS. 5 and 7 to 11 relating to embodiments and modifications described later.
- the center gear 50 is an example of an output unit in the present invention.
- the center gear 50 is disposed coaxially with the drum 20.
- the first gear 51 is arranged coaxially with the first drive shaft 22b (see FIG. 2) and is coupled to the first drive shaft 22b so as to be rotatable integrally with the first drive shaft 22b. .
- the first gear 51 is coupled to the tip of the protrusion 22c of the first drive shaft 22b.
- the second gear 52 is disposed coaxially with the second drive shaft 24b (see FIG. 2) and is coupled to the second drive shaft 24b so as to be rotatable integrally with the second drive shaft 24b.
- the second gear 52 is coupled to the tip of the protruding portion 24c of the second drive shaft 24b.
- the first gear 51 and the second gear 52 are arranged around the center gear 50 as shown in FIG. Specifically, the first gear 51 and the second gear 52 are arranged on the outer side in the radial direction of the center gear 50, and are arranged on opposite sides of the center gear 50 with the center gear 50 interposed therebetween.
- the first gear 51 and the second gear 52 mesh with the center gear 50, respectively.
- the torques 22b and 24b are synthesized. That is, the center gear 50 rotates with a torque obtained by combining the torques of the drive shafts 22b and 24b.
- the first gear 51 and the second gear 52 have the same configuration.
- the first gear 51 and the second gear 52 are smaller in diameter than the center gear 50 and have fewer teeth than the center gear 50. Thereby, the rotational speed of the center gear 50 becomes lower than the rotational speed of each of the first and second gears 51 and 52.
- the torque of the center gear 50 is a torque obtained by synthesizing the torques of the first and second gears 51 and 52, and thus is larger than the torques of the first and second gears 51 and 52. Therefore, the gear mechanism 26 generates a torque larger than the torque of each of the first and second drive shafts 22 and 24b.
- the transmission unit 28 (see FIG. 2) transmits the torque synthesized by the gear mechanism 26 to the drum 20 to rotate the drum 20 and cause the drum 20 to wind or unwind the suspension rope 10.
- the transmission unit 28 includes a transmission shaft 54 and a speed reducer 56.
- the transmission shaft 54 extends from the center gear 50 through the first shaft 41 and into the drum body 40.
- the transmission shaft 54 is arranged coaxially with the center gear 50 and can rotate about the same axis integrally with the center gear 50.
- the transmission shaft 54 is disposed coaxially with the drum 20.
- the transmission shaft 54 is rotatable relative to the first shaft 41 of the drum 20.
- the reduction gear 56 is provided in the internal space of the drum body 40.
- a transmission shaft 54 is connected to the input side of the speed reducer 56.
- the output part of the reduction gear 56 is connected to the drum body 40.
- the speed reducer 56 rotates the drum 20 at a rotational speed obtained by reducing the rotational speeds of the center gear 50 and the transmission shaft 54 by a predetermined reduction ratio when the rotation of the transmission shaft 54 is input. Further, the speed reducer 56 increases the torque of the transmission shaft 54 input from the transmission shaft 54. Thereby, the transmission unit 28 increases the torque input from the center gear 50 of the gear mechanism 26 and transmits the torque to the drum body 40.
- the first brake device 30 (see FIG. 2) is configured such that the drum 20 connected to the first drive shaft 22b via the gear mechanism 26 and the transmission unit 28 by braking the first drive shaft 22b of the first electric motor 22. This brakes the rotation.
- an electromagnetic brake is used as the first brake device 30 .
- the first brake device 30 is disposed on the first support portion 14 side with respect to the first electric motor main body 22a, that is, between the first electric motor main body 22a and the gear mechanism 26, and is fixed to the first electric motor main body 22a.
- the first brake device 30 is provided around the protruding portion 22c of the first drive shaft 22b, and brakes the protruding portion 22c.
- the second brake device 32 (see FIG. 2) is configured such that the drum 20 connected to the second drive shaft 24b via the gear mechanism 26 and the transmission unit 28 by braking the second drive shaft 24b of the second electric motor 24. This brakes the rotation.
- an electromagnetic brake similar to the first brake device 30 is used as the second brake device 32.
- the second brake device 32 is disposed on the first support portion 14 side with respect to the second electric motor main body 24a, that is, between the second electric motor main body 24a and the gear mechanism 26, and is fixed to the second electric motor main body 24a.
- the second brake device 32 is provided around the protruding portion 24c of the second drive shaft 24b, and brakes the protruding portion 24c.
- the mobile crane is equipped with a control system as shown in FIG. 4 for controlling the first and second electric motors 22 and 24 and the first and second brake devices 30 and 32.
- the control system includes a winch operating device 60, a brake operating device 62, a first inverter 64, a second inverter 66, and a controller 68.
- the winch operation device 60 is used for performing an operation of rotating the drum 20 (see FIG. 2) in the winding direction or the winding direction.
- the winch operation device 60 includes an operation lever (not shown), and outputs an instruction signal indicating the operation to the controller 68 in accordance with the operation of the operation lever.
- the brake operation device 62 is used to operate the first brake device 30 and the second brake device 32.
- the brake operation device 62 includes a brake pedal (not shown), and outputs an instruction signal indicating the operation to the controller 68 in accordance with the operation of the brake pedal.
- the first inverter 64 controls the current supplied from the power source 70 to the first electric motor main body 22a.
- the second inverter 66 controls the current supplied from the power source 70 to the second electric motor main body 24a.
- the controller 68 In response to the instruction signal input from the winch operating device 60, the controller 68 causes the first inverter so that a current corresponding to the operation of the operation lever indicated by the instruction signal flows to the first electric motor main body 22a and the second electric motor main body 24a. 64 and the second inverter 66 control the current. Accordingly, the controller 68 controls the operation of the first and second electric motors 22 and 24 so that the drum 20 rotates in the winding direction or the lowering direction according to the operation of the operation lever. Further, the controller 68 performs first braking so that the first and second brake devices 30 and 32 apply braking corresponding to the operation of the brake pedal indicated by the instruction signal in response to the instruction signal input from the brake operation device 62. And the 2nd brake devices 30 and 32 are controlled.
- the gear mechanism 26 synthesizes the torque of the first drive shaft 22b of the first electric motor 22 and the torque of the second drive shaft 24b of the second electric motor 24, and the transmission unit 28 Since the torque synthesized by the gear mechanism 26 is transmitted to the winch drum 20, the drum 20 can be rotated with a large torque. For this reason, in this electric winch device 1 and the mobile crane provided with the same, a large suspension capacity can be secured.
- the first and second electric motors 22 and 24 are disposed on one side of the drum 20 in the axial direction of the drum 20, and the first and second electric motors 22 and 24 are connected to the drum 20. Since the first electric motor 22 and the second electric motor 24 are arranged separately on both sides of the drum 20 in the axial direction of the drum 20, the electric winch is arranged.
- the apparatus 1 can be reduced in size in the axial direction of the drum 20. For this reason, when the electric winch device 1 is mounted on the upper swing body 4 so that the axial direction of the drum 20 coincides with the width direction of the upper swing body 4, the limitation on the width of the upper swing body 4 can be cleared. it can.
- the drum 20 can be rotated at a rotational speed lower than the rotational speed of the center gear 50 of the gear mechanism 26. Moreover, in the first embodiment, since the speed reducer 56 is disposed in the internal space of the drum body 40, the electric winch device 1 can be made smaller than when the speed reducer 56 is disposed outside the drum 20. .
- the first brake device 30 brakes the first drive shaft 22b of the first electric motor 22, and the second brake device 32 brakes the second drive shaft 24b of the second electric motor 24. By applying, the rotation of the drum 20 can be braked.
- the other brake The device can secure a certain braking force against the rotation of the drum 20. For this reason, the reliability of braking against the rotation of the drum 20 can be improved.
- the first brake device 30 brakes the first drive shaft 22b of the first electric motor 22, and the second brake device 32 is applied to the second drive shaft 24b of the second electric motor 24.
- the rotation of the drum 20 can be braked only by exerting a small braking force.
- the gear mechanism 26 and the speed reducer 56 increase the torques of the drive shafts 22b and 24b of the electric motors 22 and 24 and transmit them to the drum 20, but are positioned on the uppermost side in the torque transmission flow. Since the brake devices 30 and 32 corresponding to the drive shafts 22b and 24b of the electric motors 22 and 24 apply braking, the brake devices 30 and 32 can brake the rotation of the drum 20 only by exerting a small braking force. . In other words, the braking force required for each of the brake devices 30 and 32 to brake the rotation of the drum 20 is small. For this reason, a small thing with small braking capability can be used as each brake device 30 and 32, and the enlargement of the electric winch device 1 by providing the brake devices 30 and 32 can be prevented.
- FIG. 5 shows a schematic configuration of an electric winch device 1 according to the second embodiment of the present invention.
- FIG. 6 shows the configuration of a control system for controlling the electric winch device 1 according to the second embodiment.
- the electric winch apparatus 1 by 2nd Embodiment is demonstrated.
- the electric winch device 1 according to the second embodiment is mounted on a mobile crane in the same manner as the electric winch device 1 according to the first embodiment, and performs hoisting / lowering of the object 102 (see FIG. 1). .
- the transmission unit 28 is in a connection state in which torque is transmitted between the gear mechanism 26 and the drum 20, specifically, between the speed reducer 56 and the drum 20.
- a clutch 58 (see FIG. 5) that switches to a disconnected state that interrupts transmission of torque is provided.
- the speed reducer 56 is closer to the first and second electric motors 22 and 24 than in the first embodiment in the internal space of the drum body 40. Is arranged. As a result, a space is secured at a position opposite to the first and second electric motors 22 and 24 with respect to the speed reducer 56 in the internal space of the drum body 40, and the clutch 58 is provided using this space. . That is, the clutch 58 is provided in the inner space of the drum main body 40 on the opposite side of the first and second electric motors 22 and 24 with the speed reducer 56 in the axial direction of the drum 20.
- the clutch 58 for example, a wet clutch is used.
- the clutch 58 includes one clutch plate that rotates integrally with an output shaft (not shown) of the speed reducer 56, the other clutch plate that rotates integrally with the drum body 40, and a combined state in which the clutch plates are coupled to each other. And a switching device for switching to a separated state to be separated from each other. Note that one clutch plate, the other clutch plate, and the switching device of the clutch 58 are not shown.
- the clutch 58 is connected to transmit torque between the speed reducer 56 and the drum body 40 when the switching device brings the clutch plates into a coupled state.
- the clutch 58 connects the speed reducer 56 and the drum body 40 so that the transmission of torque between the speed reducer 56 and the drum body 40 is interrupted. It becomes the cutting state which separates from each other.
- the clutch 58 is controlled by a controller 68 (see FIG. 6) of the control system. Specifically, the controller 68 sends a control signal to the switching device of the clutch 58, and the switching device puts the clutch plates into a connected state or a disconnected state according to the control signal.
- the drum 20 is separated from the speed reducer 56 and the gear mechanism 26 connected thereto and the electric motors 22 and 24 and is freely rotated. Can do. As a result, the hook device 12 (see FIG. 1) can be free-falled.
- the electric winch device 1 can be reduced in size as compared with the case where the clutch is disposed outside the drum.
- the clutch 58 is disposed on the opposite side of the electric motors 22 and 24 with the speed reducer 56 in the axial direction of the drum 20, so that a cooling facility and a clutch for cooling the clutch 58 are provided.
- the 58 electrical wirings can be arranged without interfering with the cooling facilities and electrical wirings related to the motors 22 and 24. For this reason, the cooling equipment of the clutch 58 and the layout of the electrical wiring can be easily performed.
- the first brake device 30 may be disposed on the opposite side of the drum 20 with respect to the first motor body 22a and fixed to the first motor body 22a. . That is, the first brake device 30 may be fixed to the first electric motor main body 22a by disposing it on the opposite side of the gear mechanism 26 with respect to the first electric motor main body 22a. In this case, the first drive shaft 22b protrudes from the end of the first electric motor main body 22a opposite to the gear mechanism 26, and the first brake device 30 brakes the protruding portion of the first drive shaft 22b. You can do it.
- the second brake device 32 may be disposed on the opposite side of the drum 20 with respect to the second electric motor main body 24a and fixed to the second electric motor main body 24a.
- the second brake device 32 may be disposed on the opposite side of the gear mechanism 26 with respect to the second electric motor main body 24a and fixed to the second electric motor main body 24a.
- the second drive shaft 24b protrudes from the end of the second drive shaft 24b opposite to the gear mechanism 26, and the second brake device 32 brakes the protruding portion of the second drive shaft 22b. You can do it.
- the number of electric motors arranged on one side of the drum in the axial direction of the drum in the electric winch device is not necessarily limited to two. That is, three or more electric motors may be arranged on one side of the drum in the axial direction of the drum.
- FIG. 9 shows a modification in which the electric winch device 1 includes three electric motors 72 and these are arranged on one side of the drum 20 in the axial direction of the drum 20.
- the electric motor 72, the gear 74 coupled to the drive shaft of the electric motor 72 and rotating integrally with the drive shaft, and the brake device 76 for applying braking to the drive shaft are set as one unit 78.
- the gear 74 of each unit 78 is engaged with the center gear 50.
- the electric motor 72 is the same as the first and second electric motors 22 and 24 of the first embodiment
- the gear 74 is the same as the first and second gears 51 and 52 of the first embodiment.
- the brake device 76 is the same as the first and second brake devices 30 and 32 of the first embodiment.
- four or more units 78 may be similarly arranged around the center gear 50.
- the brake device 76 may be disposed on the opposite side of the drum 20 with respect to the electric motor body, as in the modified examples of FIGS.
- the torque that can be applied to the drum 20 can be increased by providing more electric motors 72.
- all the electric motors 72 included in the electric winch device 1 are arranged only on one side of the drum 20 in the axial direction of the drum 20, and the electric motors 72 are orthogonal to the axial direction of the drum 20. Therefore, the size of the electric winch device 1 in the axial direction of the drum 20 can be prevented from increasing, and the limitation on the width of the upper swing body 4 can be cleared.
- the electric winch device is not necessarily limited to the one in which the electric motor is arranged only on one side of the drum in the axial direction of the drum.
- the electric winch device 1 is in addition to the first and second electric motors 22 and 24 disposed on the first support portion 14 side, which is one side of the drum 20 in the axial direction.
- a third electric motor 82 disposed on the second support portion 16 side, which is the other side of the drum 20 in the axial direction, may be provided.
- the third electric motor 82 passes through the second electric shaft 42 from the third electric motor main body 82a disposed on the opposite side of the drum 20 across the second support portion 16 in the axial direction of the drum 20. And a third drive shaft 82b extending into the drum body 40.
- the third electric motor main body 82a is the same as the first electric motor main body 22a of the first embodiment.
- the third drive shaft 82 b is disposed coaxially with the drum 20.
- a third brake device 84 is disposed on the second support portion 16 side of the third electric motor main body 82a.
- the third brake device 84 is fixed to the third electric motor main body 82a.
- the third brake device 84 applies braking to a portion of the third drive shaft 82b that protrudes from the third electric motor main body 82a toward the drum 20 side.
- a first reduction gear 86 of the transmission unit 28 that transmits the torque synthesized by the gear mechanism 26 to the drum main body 40, and a second reduction gear in which a third drive shaft 82b is connected to the input side.
- a machine 88 is provided.
- the first speed reducer 86 is the same as the speed reducer 56 of the first embodiment, but is disposed at a position closer to the first support portion 14 than the position where the speed reducer 56 is disposed.
- the second reducer 88 is arranged in the axial direction of the first reducer 86 and the drum 20 in the internal space of the drum body 40, and is arranged on the second support portion 16 side with respect to the first reducer 86. Has been.
- the output part of the second reduction gear 88 is connected to the drum body 40.
- the second speed reducer 88 rotates the drum body 40, that is, the drum 20 at a rotational speed obtained by reducing the rotational speed of the third drive shaft 82 b by a predetermined reduction ratio.
- the axial lengths of the first and second electric motor bodies 22a and 24a are longer than the axial lengths of the first and second electric motor bodies 22a and 24a of the first embodiment. Is also small. Specifically, the axial lengths of the first and second electric motor bodies 22a and 24a in this modification are the axial lengths of the first and second electric motor bodies 22a and 24a of the first embodiment. About half of that.
- the size of the electric winch device 1 in the axial direction of the drum 20 is increased, but the first and second electric motor main bodies 22a, By reducing the length of 24a, it is possible to suppress the size of the electric winch device 1 from greatly increasing.
- the output torque of the first motor 22 in the modified example of FIG. 10 is the first motor 22 of the first embodiment.
- the output torque of the second electric motor 24 in the modification is smaller than the output torque of the second electric motor 24 of the first embodiment, but it is equal to or greater than the reduction of those output torques. Torque can be applied by the third electric motor 82. For this reason, according to the modification of this FIG. 10, it is possible to improve the suspension capacity by the electric winch device 1.
- the first electric motor 22, the first brake device 30, and the second electric motor disposed on the first support portion 14 side, which is one side of the drum 20 in the axial direction of the drum 20.
- the second unit 92 which is the same as the first unit 91 including the second brake device 32, the gear mechanism 26, and the transmission unit 28, on the second support unit 16 side, which is the other side in the axial direction of the drum 20 You may provide so that it may become symmetrical with 91.
- the configurations of the units 91 and 92 are the same as those of the first motor 22, the first brake device 30, the second motor 24, the second brake device 32, the gear mechanism 26, and the transmission unit 28 in the modification shown in FIG. It is the same as the structure of the unit which consists of.
- the axial lengths of the two electric motor bodies 94a, 96a of the second unit 92 provided on the second support portion 16 side are the axial directions of the third electric motor body 82a of the modification shown in FIG. Is less than the length of For this reason, in this modification, the dimension of the electric winch apparatus 1 in the axial direction of the drum 20 can be reduced compared with the case of the modification of FIG.
- the output torques of the electric motors 94 and 96 of the second unit 92 are smaller than the output torque of the third electric motor 82 of the modified example of FIG. 10, but the number of electric motors 94 and 96 is as shown in FIG. Therefore, the torque applied from the second unit 92 to the drum 20 can be equal to or greater than that of the modification of FIG.
- the clutch may not necessarily be provided between the reduction gear and the drum in the transmission unit that transmits torque between the gear mechanism and the drum.
- it may be provided between the gear mechanism and the speed reducer.
- the electric winch device according to the present invention is not necessarily limited to the hoisting device for hoisting / lowering an object.
- the electric winch device according to the present invention may be a hoisting winch device for hoisting hoisting members such as a boom.
- FIG. 12 shows a schematic configuration of a mobile crane equipped with a hoisting electric winch device 105 according to a modification of the present invention.
- the upper swing body 4 of this mobile crane is provided with a gantry 106 erected at the rear part thereof.
- this mobile crane is provided with the hoisting device 107 as an operation part for suspension work.
- the hoisting device 107 includes a boom 8 as a hoisting member, a mast 108, a guy line 110, a mast side spreader 112a, and a gantry side spreader 112b.
- the mast 108 is provided at an intermediate portion in the front-rear direction of the upper swing body 4 so as to be rotatable around an axis extending in the width direction of the upper swing body 4.
- the tip of the mast 108 and the tip of the boom 8 are connected via a guy line 110.
- the mast side spreader 112 a is provided at the tip of the mast 108, and the gantry side spreader 112 b is attached to the top of the gantry 106.
- the electric winch device 105 is installed near the base of the gantry 106. Specifically, a pair of support bases 109 corresponding to the first and second support bases 14a and 16a are attached to a portion near the base of the gantry 106 in a state where the support bases 109 are separately arranged in the width direction of the upper swing body 4. ing.
- the pair of support bases 109 respectively support unillustrated bearings corresponding to the first and second bearings 14b and 16b.
- the shaft of the winch drum 115 (hereinafter simply referred to as the drum 115) of the electric winch device 105 is supported by the unillustrated bearing so as to be rotatable.
- the drum 115 is arranged such that its axial direction coincides with the width direction of the upper swing body 4.
- Undulation rope 116 is wound around the drum 115.
- the hoisting rope 116 drawn from the drum 115 is wound around the gantry spreader 112b and the mast spreader 112a.
- the drum 115 rotates to wind / unwind the hoisting rope 116, thereby causing the hoisting device 107 to perform an operation for hanging work so that the boom 8 is hoisted.
- the drum 115 rotates so as to wind up the undulating rope 116, thereby pulling the mast side spreader 112a toward the gantry side spreader 112b, thereby rotating the mast 108 rearward and via the guy line 110. Pull the tip of the boom 8 backward. Thereby, the boom 8 stands up while rotating backward.
- the drum 115 rotates so as to pay out the hoisting rope 116, thereby allowing the mast side spreader 112a to be separated forward from the gantry side spreader 112b, so that the boom 8 is connected to the mast 108 via the guy line 110. While lying down, it falls down while rotating forward.
- the mobile crane according to the present invention is not limited to the crawler crane.
- the present invention can be similarly applied to a wheel crane having a wheel-type lower traveling body.
- the electric winch device is mounted on a mobile crane provided with an operation unit for suspension work, and performs an operation for suspension work on the operation unit by winding or unwinding a rope connected to the operation unit.
- An electric winch device that has a central axis and is provided on the movable crane so as to be rotatable about the central axis, and the winch drum around which the rope is wound, and the winch drum
- a plurality of electric motors arranged on one side of the winch drum in an axial direction in which the central axis extends and arranged in a direction orthogonal to the axial direction of the winch drum, and torque output from each of the plurality of electric motors
- a gear mechanism for synthesizing the motor, and a torque synthesized by the gear mechanism is transmitted to the winch drum to rotate the winch drum.
- a transmission unit to perform the winding or unwinding of the rope to the winch drum.
- the gear mechanism synthesizes the torque output from each of the plurality of electric motors, and the transmission unit transmits the torque synthesized by the gear mechanism to the winch drum, so the winch drum is rotated with a large torque. be able to. For this reason, the big suspension capability by an electric winch device is securable.
- a plurality of electric motors are arranged on one side of the winch drum in the axial direction of the winch drum, and the plurality of electric motors are arranged in a direction perpendicular to the axial direction of the winch drum.
- the electric winch device can be downsized in the axial direction of the winch drum as compared with the case where the plurality of electric motors are arranged separately on both sides in the axial direction of the winch drum. For this reason, when the electric winch device is mounted on the mobile crane, the size of the mobile crane is not increased, and the limitation on the size of the mobile crane can be cleared.
- the plurality of electric motors are preferably all electric motors included in the electric winch device.
- the winch drum is provided even when the electric winch device includes many electric motors.
- the electric winch device can be reduced in size in the axial direction.
- the transmission unit is configured to interrupt a connection state in which torque is transmitted between the gear mechanism and the winch drum, and transmission of torque between the gear mechanism and the winch drum. It is preferable to have a clutch that switches to a disconnected state in which the gear mechanism and the winch drum are separated from each other.
- the winch drum can be separated from the gear mechanism and the electric motor connected thereto and freely rotated by disengaging the clutch. For this reason, free fall of an object can be carried out.
- the gear mechanism includes an output unit that rotates with a torque obtained by synthesizing torque output from each of the plurality of electric motors, and the transmission unit rotates the winch drum at a rotation speed of the output unit. It is preferable to have a speed reducer that rotates at a lower rotational speed.
- the winch drum can be rotated at a rotational speed lower than the rotational speed of the output portion of the gear mechanism. Moreover, in this configuration, since the speed reducer is disposed inside the winch drum, the electric winch device can be made smaller than when the speed reducer is disposed outside the winch drum.
- the transmission unit is connected so that torque is transmitted between the speed reducer and the winch drum, and transmission of torque is blocked between the speed reducer and the winch drum.
- the winch drum can be separated from the speed reducer, the gear mechanism connected to the speed reducer, and the electric motor by rotating the clutch in a disengaged state, so that free fall of the object can be performed.
- the electric winch device can be made smaller than when the clutch is disposed outside the winch drum.
- the clutch is arranged on the opposite side of the electric motor across the reduction gear in the axial direction of the winch drum, so that the cooling equipment for cooling the clutch and the electric wiring connected to the clutch interfere with the equipment related to the electric motor. It can be arranged without. For this reason, the cooling facility for the clutch and the layout of the electrical wiring can be easily performed.
- each of the plurality of electric motors includes a drive shaft connected to the gear mechanism, and an electric motor main body that rotates the drive shaft, and the gear mechanism and the transmission unit include the drive shaft.
- the electric winch device further includes a plurality of brake devices that apply brakes to the drive shafts of the plurality of electric motors.
- the rotation of the winch drum can be braked by applying braking to the drive shaft of the motor to which each brake device corresponds.
- the gear mechanism and the transmission unit increase the torque of the drive shaft of the motor and transmit the torque to the winch drum. Since each brake device applies braking to the drive shaft, each brake device can brake the rotation of the winch drum with a small braking force.
- each brake device the braking force required for each brake device to brake the rotation of the winch drum is small. For this reason, a small thing with small braking capability can be used as each brake device, and the enlargement of the electric winch device by providing a brake device can be prevented.
- a mobile crane according to the present invention is a mobile crane provided with the electric winch device.
- This mobile crane is equipped with the electric winch device, so that it can clear the dimensional limit while securing a large lifting capacity.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Jib Cranes (AREA)
- Gear Transmission (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
Abstract
電動ウインチ装置は、吊作業用の作動部を備えた移動式クレーンに搭載され、前記作動部に繋がるロープの巻き取り又は繰り出しを行うことにより前記作動部に吊作業のための動作を行わせるものであって、中心軸を有していてその中心軸回りに回転可能となるように前記移動式クレーンに設けられ、前記ロープが巻かれたウインチドラムと、前記ウインチドラムの前記中心軸が延びる方向である軸方向において前記ウインチドラムの一方側に配置されるとともに前記ウインチドラムの軸方向と直交する方向に並ぶ複数の電動機と、前記複数の電動機の各々から出力されるトルクを合成するギア機構と、前記ギア機構により合成されたトルクを前記ウインチドラムに伝達して前記ウインチドラムを回転させて、前記ウインチドラムに前記ロープの巻き取り又は繰り出しを行わせる伝達部と、を備える。
Description
本発明は、電動ウインチ装置及び移動式クレーンに関する。
従来、移動式クレーンでは、油圧モータ等の油圧アクチュエータにより駆動されるウインチ装置が搭載され、そのウインチ装置により吊荷の巻き上げ及び巻き下げ等の吊作業が行われている。
一方、油圧アクチュエータのエネルギ効率が低いことから、省エネルギのため、エネルギ効率の良い電動アクチュエータを用いた電動ウインチ装置をクレーンに搭載することが提案されている。例えば、建築中の建物のフロアに固定されてクレーン作業を行うタワークレーンに、電動ウインチ装置を搭載することが提案されている。下記特許文献1には、タワークレーンの一例であるクライミングクレーンが示されている。
特許文献1に開示されたクライミングクレーンは、ウインチドラムとそれを回転駆動する2つの電動機とを有する電動ウインチ装置を備えている。この電動ウインチ装置では、ウインチドラムの入力軸又はウインチドラム自体に局所的なねじれが発生するのを防ぐために2つの電動機がウインチドラムの軸方向の両側に分かれて配置され、その両側から各電動機のトルクがウインチドラムに入力されるようになっている。
特許文献1の電動ウインチ装置では、2つの電動機が出力するトルクでウインチドラムを回転させるため、大きな吊能力を確保できるという利点はあるものの、この電動ウインチ装置を移動式クレーンに搭載することは、移動式クレーンの寸法の制約上から困難である。その理由は、以下の通りである。
移動式クレーンでは、ウインチ装置は上部旋回体に搭載され、この上部旋回体は、搬送時及び移動式クレーンが公道を自走する時に寸法の制限を受ける。
具体的に、移動式クレーンの搬送時には、上部旋回体はトレーラ等の運搬車両に積載されて搬送されるが、その際、上部旋回体は、一般的に、その幅方向が運搬車両の幅方向に一致するように積載される。運搬車両は、公道を走行するため、法令で定められた車幅制限をクリアする必要があり、それに伴って、上部旋回体の幅は、車幅制限に基づいた制約を受ける。ウインチ装置は、そのウインチドラムの軸方向が上部旋回体の幅方向に一致するように上部旋回体に搭載されるが、特許文献1の電動ウインチ装置のように2つの電動機がウインチドラムの軸方向の両側に配置されている場合には、ウインチドラムの軸方向における電動ウインチ装置の寸法が増大するため、上記のような上部旋回体の幅の制約から当該電動ウインチ装置を上部旋回体に搭載することは困難になる。
また、移動式クレーンが公道を自走する時には、移動式クレーン自体が上記車幅制限をクリアする必要がある。移動式クレーンが公道を自走する際、上部旋回体はその幅方向が移動式クレーンの車幅方向に一致するように配置されるため、この場合も上部旋回体の幅は、車幅制限に基づいた制約を受ける。従って、この場合も、特許文献1の電動ウインチ装置を上部旋回体に搭載することは困難になる。
本発明の目的は、大きな吊能力を確保しつつ、移動式クレーンの寸法の制限をクリアすることが可能な電動ウインチ装置及び移動式クレーンを提供することである。
本発明の一局面に従う電動ウインチ装置は、吊作業用の作動部を備えた移動式クレーンに搭載され、前記作動部に繋がるロープの巻き取り又は繰り出しを行うことにより前記作動部に吊作業のための動作を行わせる電動ウインチ装置であって、中心軸を有していてその中心軸回りに回転可能となるように前記移動式クレーンに設けられ、前記ロープが巻かれたウインチドラムと、前記ウインチドラムの前記中心軸が延びる方向である軸方向において前記ウインチドラムの一方側に配置されるとともに前記ウインチドラムの軸方向と直交する方向に並ぶ複数の電動機と、前記複数の電動機の各々から出力されるトルクを合成するギア機構と、前記ギア機構により合成されたトルクを前記ウインチドラムに伝達して前記ウインチドラムを回転させて、前記ウインチドラムに前記ロープの巻き取り又は繰り出しを行わせる伝達部と、を備える。
また、本発明の別の局面に従う移動式クレーンは、前記一局面に従う電動ウインチ装置を備えている。
以下、本発明の実施形態について図面を参照して説明する。
(第1実施形態)
図1~図4を参照して、本発明の第1実施形態による電動ウインチ装置1及びそれを備えた移動式クレーンについて説明する。
図1~図4を参照して、本発明の第1実施形態による電動ウインチ装置1及びそれを備えた移動式クレーンについて説明する。
この第1実施形態による電動ウインチ装置1を備える移動式クレーンは、例えば図1に示すようなクレーンである。この移動式クレーンは、クローラクレーンである。この移動式クレーンは、クローラ式の自走可能な下部走行体2と、その下部走行体2上に搭載された上部旋回体4とを備える。
上部旋回体4は、旋回フレーム6と、ブーム8と、フック装置12とを備える。旋回フレーム6は、下部走行体2上に縦軸回りに旋回可能となるように搭載されている。ブーム8は、旋回フレーム6の前部に起伏可能となるように取り付けられている。フック装置12は、ブーム8の先端からワイヤロープである吊ロープ10を介して吊り下げられて吊荷100を吊るものである。フック装置12は、本発明における吊作業用の作動部の一例である。以下、場合により、フック装置12及びそれに吊られた吊荷100を一体として巻上/巻下の対象物102という。
なお、以下の説明における「前」、「後」の用語は、上部旋回体4又は旋回フレーム6の「前」、「後」のことを意味する。上部旋回体4の前側は、ブーム8が設けられた側に相当し、上部旋回体4の後側は、ブーム8が設けられた側と反対側に相当する。また、上部旋回体4の幅方向は、上部旋回体4の前後方向及び旋回軸方向の両方に対して直交する方向に相当する。
旋回フレーム6上には、図2に示すように、後述のウインチドラム20を支持するための第1支持部14及び第2支持部16が設けられている。第1支持部14及び第2支持部16は、旋回フレーム6の前後方向の中間位置に設けられており、旋回フレーム6におけるブーム8(図1参照)の取付部位の後方に配置されている。第1支持部14と第2支持部16は、旋回フレーム6の幅方向において互いに対向し且つその幅方向において間隔をあけて配置されている。
第1支持部14は、図2に示すように、旋回フレーム6上に固定された第1支持台14aと、その第1支持台14aにより支持された第1軸受14bとを有する。第2支持部16は、旋回フレーム6上に固定された第2支持台16aと、その第2支持台16aにより支持された第2軸受16bとを有する。
電動ウインチ装置1は、上部旋回体4(図1参照)に搭載されている。電動ウインチ装置1は、旋回フレーム6におけるブーム8の取付部位の後方に配置されている。電動ウインチ装置1は、フック装置12に繋がる吊ロープ10の巻き取り又は繰り出しを行うことによりフック装置12に吊作業のための昇降動作を行わせる巻上用のウインチ装置である。電動ウインチ装置1は、図2及び図3に示すように、ウインチドラム20(以下、単にドラム20と称する)と、第1電動機22と、第2電動機24と、ギア機構26と、伝達部28と、第1ブレーキ装置30と、第2ブレーキ装置32と、を備える。
ドラム20は、吊ロープ10が巻かれていて、回転されて吊ロープ10の巻き取り/繰り出しを行い、それによってフック装置12(図1参照)の巻上/巻下を行うものである。すなわち、ドラム20は、回転されて吊ロープ10の巻き取り/繰り出しを行うことにより、対象物102の巻上/巻下を行うものである。ドラム20は、当該ドラム20の回転中心となる中心軸20aを有していて、その中心軸20aの延びる方向である当該ドラム20の軸方向が上部旋回体4の幅方向に一致するように第1支持部14及び第2支持部16によって支持され、それによって旋回フレーム6上に設置されている。ドラム20は、図2に示すように、ドラム本体40と、第1軸41と、第2軸42とを有する。なお、図2では、ドラム本体40の内部の構成を示すため、ドラム本体40及び吊ロープ10がドラム本体40の軸方向に沿った断面で表されている。
ドラム本体40は、吊ロープ10が巻かれる部分である。吊ロープ10は、このドラム本体40から引き出されてブーム8(図1参照)の先端を経由し、そのブーム8の先端から垂下されてフック装置12を吊り下げる。ドラム本体40は、軸方向両端に鍔の付いた円筒状に形成されている。前記中心軸20aは、この円筒状のドラム本体30の中心軸に相当する。ドラム本体40は、内部に空間を有する。
第1軸41(図2参照)は、ドラム本体40の軸方向の一端に固定的に設けられており、それによって、ドラム本体40と一体的に回転可能となっている。第1軸41は、ドラム本体40の軸方向の一端からドラム本体40の外側へ延びるとともにドラム本体40と同軸に配置されている。
第2軸42(図2参照)は、ドラム本体40の軸方向の他端に固定的に設けられており、それによって、ドラム本体40と一体的に回転可能となっている。第2軸42は、ドラム本体40の軸方向の他端からドラム本体40の外側へ延びるとともにドラム本体40と同軸に配置されている。
ドラム本体40が第1支持部14と第2支持部16との間に配置された状態で、第1軸41が第1軸受14bにより回転自在となるように支持されるとともに第2軸42が第2軸受16bにより回転自在となるように支持されている。これにより、ドラム20は、上部旋回体4の幅方向に延びる当該ドラム20の中心軸20a回りに回転自在となるように移動式クレーンの上部旋回体4に設けられている。ドラム20は、一方の回転方向である巻上方向に回転することにより吊ロープ10をドラム本体40に巻き取り、それによってフック装置12(図1参照)を巻き上げ、対象物102を巻き上げる。また、ドラム20は、巻上方向と逆の回転方向である巻下方向に回転することにより吊ロープ10を繰り出し、それによってフック装置12を巻き下げ、対象物102を巻き下げる。
第1電動機22及び第2電動機24は、電力が供給されることによって作動し、対象物102の巻上時にドラム20を巻上方向に回転させるためのトルクを出力する。第1及び第2電動機22,24は、図2に示すように、両方とも、移動式クレーンの上部旋回体4上において、ドラム20の軸方向における当該ドラム20の一方側に配置されている。具体的には、第1及び第2電動機22,24は、ドラム20の軸方向において、第1支持部14を挟んでドラム本体40と反対側に配置されている。
第1電動機22は、第1電動機本体22aと、第1駆動軸22bとを有する。第1電動機本体22aは、電力が供給されることによって作動して第1駆動軸22bをその軸回りに回転させる駆動装置である。すなわち、第1駆動軸22bは、第1電動機本体22aが作動することにより回転する。第1駆動軸22bは、第1電動機本体22aにより生成されるトルクの出力軸に相当する。すなわち、第1駆動軸22bは、第1電動機22のトルクの出力軸に相当する。第1電動機22は、旋回フレーム6上に設置された図略の電動機支持部によって第1電動機本体22aが支持されることにより、第1駆動軸22bがドラム20の軸方向に延びる姿勢で設置されている。第1駆動軸22bは、第1電動機本体22aから第1支持部14側へ突出して延びる突出部22c(図2参照)を有する。第1駆動軸22bは、ギア機構26に接続されている。
第2電動機24は、第2電動機本体24aと、第2駆動軸24bとを有する。第2電動機本体24aは、電力が供給されることによって作動して第2駆動軸24bをその軸回りに回転させる駆動装置である。すなわち、第2駆動軸24bは、第2電動機本体24aが作動することにより回転する。第2駆動軸24bは、第2電動機本体24aにより生成されるトルクの出力軸に相当する。すなわち、第2駆動軸24bは、第2電動機24のトルクの出力軸に相当する。第2電動機24は、旋回フレーム6上に設置された図略の電動機支持部によって第2電動機本体24aが支持されることにより、第2駆動軸24bがドラム20の軸方向に延びる姿勢で設置されている。また、第2電動機24は、その第2駆動軸24bが第1駆動軸22bと平行になるようにドラム20の軸方向と直交する方向において第1電動機22と並んで配置されている。第2駆動軸24bは、第2電動機本体24aから第1支持部14側へ突出して延びる突出部24c(図2参照)を有する。
ギア機構26は、第1電動機22が出力するトルクと第2電動機24が出力するトルクとを合成するものである。すなわち、ギア機構26は、第1駆動軸22bのトルクと第2駆動軸24bのトルクとを合成する。ギア機構26は、第1及び第2電動機22,24と第1支持部14との間に配置されている。換言すれば、ギア機構26は、ドラム20の軸方向において第1支持部14を挟んでドラム本体40と反対側に配置されている。
ギア機構26は、図2及び図3に示すように、センターギア50と、第1ギア51と、第2ギア52とを有する。これらのギア50,51,52は、いずれも外歯車である。図2及び図3では、ギア50,51,52を模式的に表しており、それらのギアの外歯の図示を省略している。また、図3では、センターギア50に対する第1ギア51と第2ギア52の配置及びセンターギア50に結合された後述の伝達軸54を判りやすく示すために、ドラム20の第1軸41や第1軸受14b等については図示を省略している。これらのことは、後述する実施形態及び変形例に関する図5、図7~図11においても同様である。
センターギア50は、本発明における出力部の一例である。センターギア50は、ドラム20と同軸に配置されている。第1ギア51は、第1駆動軸22b(図2参照)と同軸に配置されるとともに、第1駆動軸22bと一体的に回転可能となるようにその第1駆動軸22bに結合されている。具体的には、第1ギア51は、第1駆動軸22bの突出部22cの先端に結合されている。第2ギア52は、第2駆動軸24b(図2参照)と同軸に配置されるとともに、第2駆動軸24bと一体的に回転可能となるようにその第2駆動軸24bに結合されている。具体的には、第2ギア52は、第2駆動軸24bの突出部24cの先端に結合されている。
第1ギア51と第2ギア52は、図3に示すように、センターギア50の周りに配置されている。具体的には、第1ギア51と第2ギア52は、センターギア50の径方向外側に配置され、センターギア50の径方向においてセンターギア50を挟んで互いに反対側に配置されている。第1ギア51と第2ギア52は、それぞれ、センターギア50と噛み合っている。これにより、第1駆動軸22bのトルクが第1ギア51からセンターギア50に伝達されるとともに、第2駆動軸24bのトルクが第2ギア52からセンターギア50に伝達され、それによって両駆動軸22b,24bのトルクが合成される。すなわち、センターギア50は、両駆動軸22b,24bのトルクを合成したトルクで回転する。
第1ギア51と第2ギア52は、同じ構成を有する。第1ギア51及び第2ギア52は、センターギア50よりも小径であるとともにセンターギア50の歯数よりも少ない歯数を有する。これにより、センターギア50の回転速度は、第1及び第2ギア51,52の各々の回転速度よりも低くなる。一方、センターギア50のトルクは、第1及び第2ギア51,52のトルクを合成したトルクとなるから、それら第1及び第2ギア51,52の各々のトルクよりも大きくなる。従って、ギア機構26は、第1及び第2駆動軸22,24bの各々のトルクよりも大きいトルクを生成する。
伝達部28(図2参照)は、ギア機構26により合成されたトルクをドラム20へ伝達してドラム20を回転させて、ドラム20に吊ロープ10の巻き取り又は繰り出しを行わせるものである。伝達部28は、図2に示すように、伝達軸54と、減速機56とを有する。
伝達軸54は、センターギア50から第1軸41を貫通してドラム本体40内へ延びている。伝達軸54は、センターギア50と同軸に配置されるとともに、センターギア50と一体的に同じ軸回りに回転可能となっている。また、伝達軸54は、ドラム20と同軸に配置されている。伝達軸54は、ドラム20の第1軸41に対して相対回転可能となっている。
減速機56は、ドラム本体40の内部空間に設けられている。減速機56の入力側には、伝達軸54が接続されている。減速機56の出力部は、ドラム本体40に接続されている。減速機56は、伝達軸54の回転が入力されることによりセンターギア50及び伝達軸54の回転速度を所定の減速比で減速させた回転速度でドラム20を回転させる。また、減速機56は、伝達軸54から入力されるその伝達軸54のトルクを増大させる。これにより、伝達部28は、ギア機構26のセンターギア50から入力されるトルクを増大させてドラム本体40へ伝達する。
第1ブレーキ装置30(図2参照)は、第1電動機22の第1駆動軸22bに対して制動を掛けることにより、ギア機構26及び伝達部28を介して第1駆動軸22bと繋がるドラム20の回転を制動するものである。第1ブレーキ装置30としては、例えば電磁ブレーキが用いられる。第1ブレーキ装置30は、第1電動機本体22aに対して第1支持部14側、すなわち第1電動機本体22aとギア機構26との間に配置されて第1電動機本体22aに固定されている。第1ブレーキ装置30は、第1駆動軸22bの突出部22cの周りに設けられており、その突出部22cに対して制動を掛ける。
第2ブレーキ装置32(図2参照)は、第2電動機24の第2駆動軸24bに対して制動を掛けることにより、ギア機構26及び伝達部28を介して第2駆動軸24bと繋がるドラム20の回転を制動するものである。第2ブレーキ装置32としては、第1ブレーキ装置30と同様の電磁ブレーキが用いられる。第2ブレーキ装置32は、第2電動機本体24aに対して第1支持部14側、すなわち第2電動機本体24aとギア機構26との間に配置されて第2電動機本体24aに固定されている。第2ブレーキ装置32は、第2駆動軸24bの突出部24cの周りに設けられており、その突出部24cに対して制動を掛ける。
移動式クレーンには、第1及び第2電動機22,24と第1及び第2ブレーキ装置30,32を制御するための図4に示すような制御システムが搭載される。この制御システムは、ウインチ操作装置60と、ブレーキ操作装置62と、第1インバータ64と、第2インバータ66と、コントローラ68とを有する。
ウインチ操作装置60は、ドラム20(図2参照)を巻上方向又は巻下方向へ回転させる操作を行うために用いられるものである。ウインチ操作装置60は、図略の操作レバーを備えており、この操作レバーの操作に応じてその操作を示す指示信号をコントローラ68へ出力する。
ブレーキ操作装置62は、第1ブレーキ装置30及び第2ブレーキ装置32を操作するために用いられるものである。ブレーキ操作装置62は、図略のブレーキペダルを備えており、このブレーキペダルの操作に応じてその操作を示す指示信号をコントローラ68へ出力する。
第1インバータ64は、電源70から第1電動機本体22aへ供給される電流を制御するものである。
第2インバータ66は、電源70から第2電動機本体24aへ供給される電流を制御するものである。
コントローラ68は、ウインチ操作装置60から入力される指示信号に応じて、その指示信号が示す操作レバーの操作に対応した電流が第1電動機本体22aと第2電動機本体24aへ流れるように第1インバータ64と第2インバータ66に電流を制御させる。それによって、コントローラ68は、ドラム20が操作レバーの操作に応じた巻上方向又は巻下方向への回転を行うように第1及び第2電動機22,24の作動を制御する。また、コントローラ68は、ブレーキ操作装置62から入力される指示信号に応じて、第1及び第2ブレーキ装置30,32がその指示信号が示すブレーキペダルの操作に対応した制動を掛けるように第1及び第2ブレーキ装置30,32を制御する。
この第1実施形態の電動ウインチ装置1では、ギア機構26が第1電動機22の第1駆動軸22bのトルクと第2電動機24の第2駆動軸24bのトルクとを合成し、伝達部28がそのギア機構26により合成されたトルクをウインチドラム20に伝達するため、大きなトルクでドラム20を回転させることができる。このため、この電動ウインチ装置1及びそれを備えた移動式クレーンでは、大きな吊能力を確保できる。
しかも、この第1実施形態では、ドラム20の軸方向における当該ドラム20の一方側に第1及び第2電動機22,24が配置されるとともに、その第1及び第2電動機22,24がドラム20の軸方向と直交する方向に並んで配置されるので、仮に第1電動機22と第2電動機24がドラム20の軸方向においてそのドラム20の両側に分かれて配置される場合に比べて、電動ウインチ装置1をドラム20の軸方向において小型化することができる。このため、ドラム20の軸方向が上部旋回体4の幅方向に一致するように電動ウインチ装置1が上部旋回体4に搭載されたときに、上部旋回体4の幅の制限をクリアすることができる。
また、この第1実施形態では、伝達部28が減速機56を備えているため、ギア機構26のセンターギア50の回転速度よりも低い回転速度でドラム20を回転させることができる。しかも、この第1実施形態では、減速機56がドラム本体40の内部空間に配置されているため、減速機56がドラム20の外側に配置されている場合よりも電動ウインチ装置1を小型化できる。
また、この第1実施形態では、第1ブレーキ装置30が第1電動機22の第1駆動軸22bに制動を掛けるとともに、第2ブレーキ装置32が第2電動機24の第2駆動軸24bに制動を掛けることにより、ドラム20の回転を制動することができる。
しかも、この第1実施形態では、仮に、第1ブレーキ装置30と第2ブレーキ装置32のうちの一方のブレーキ装置が故障して制動力を発揮できなくなった場合であっても、もう一方のブレーキ装置によりドラム20の回転に対する制動力をある程度確保できる。このため、ドラム20の回転に対する制動の信頼性を向上できる。
さらに、この第1実施形態では、第1ブレーキ装置30が第1電動機22の第1駆動軸22bに対して制動を掛けるとともに、第2ブレーキ装置32が第2電動機24の第2駆動軸24bに対して制動を掛けることにより、第1及び第2ブレーキ装置30,32は、それぞれ、小さい制動力を発揮するだけでドラム20の回転を制動することができる。
具体的に、ギア機構26及び減速機56は、各電動機22,24の各駆動軸22b,24bのトルクを増大させてドラム20へ伝達するが、そのトルクの伝達の流れにおいて最も上手側に位置する電動機22,24の駆動軸22b,24bに対して対応するブレーキ装置30,32が制動を掛けるから、各ブレーキ装置30,32は、小さい制動力を発揮するだけでドラム20の回転を制動できる。換言すれば、ドラム20の回転を制動するのに各ブレーキ装置30,32に必要とされる制動力は小さくて済む。このため、各ブレーキ装置30,32として制動能力が小さい小型のものを用いることができ、ブレーキ装置30,32を設けることによる電動ウインチ装置1の大型化を防ぐことができる。
(第2実施形態)
図5には、本発明の第2実施形態による電動ウインチ装置1の概略的な構成が示されている。図6には、この第2実施形態による電動ウインチ装置1を制御するための制御システムの構成が示されている。図5及び図6を参照して、第2実施形態による電動ウインチ装置1について説明する。
図5には、本発明の第2実施形態による電動ウインチ装置1の概略的な構成が示されている。図6には、この第2実施形態による電動ウインチ装置1を制御するための制御システムの構成が示されている。図5及び図6を参照して、第2実施形態による電動ウインチ装置1について説明する。
第2実施形態による電動ウインチ装置1は、上記第1実施形態の電動ウインチ装置1と同様に移動式クレーンに搭載されて対象物102(図1参照)の巻上/巻下を行うものである。ただし、この第2実施形態による電動ウインチ装置1では、伝達部28が、ギア機構26とドラム20との間、具体的には減速機56とドラム20との間でトルクを伝達する接続状態とトルクの伝達を遮断する切断状態とに切り換わるクラッチ58(図5参照)を備えている。
具体的に、この第2実施形態では、減速機56は、図5に示すように、ドラム本体40の内部空間において、上記第1実施形態の場合よりも第1及び第2電動機22,24寄りに配置されている。これにより、ドラム本体40の内部空間のうち減速機56に対して第1及び第2電動機22,24と反対側の位置にスペースが確保され、このスペースを利用してクラッチ58が設けられている。すなわち、クラッチ58は、ドラム20の軸方向において減速機56を挟んで第1及び第2電動機22,24と反対側で且つドラム本体40の内部空間に設けられている。
クラッチ58としては、例えば湿式クラッチが用いられる。クラッチ58は、減速機56の図略の出力軸と一体的に回転する一方のクラッチ板と、ドラム本体40と一体的に回転する他方のクラッチ板と、それらのクラッチ板同士を結合させる結合状態と互いに分離させる分離状態とに切り換えるための切換装置とを備える。なお、このクラッチ58の一方のクラッチ板、他方のクラッチ板及び切換装置については、図示を省略している。切換装置がクラッチ板同士を結合状態にすることによって、クラッチ58は、減速機56とドラム本体40との間でトルクを伝達する接続状態になる。一方、切換装置がクラッチ板同士を分離状態にすることによって、クラッチ58は、減速機56とドラム本体40との間でのトルクの伝達が遮断されるように減速機56とドラム本体40とを互いに切り離す切断状態になる。
クラッチ58は、制御システムのコントローラ68(図6参照)によって制御される。具体的には、コントローラ68がクラッチ58の切換装置に制御信号を送り、切換装置は、その制御信号に応じて前記クラッチ板同士を結合状態又は切断状態にする。
この第2実施形態の電動ウインチ装置1に関する上記以外の構成は、上記第1実施形態の電動ウインチ装置1に関する構成と同様である。
この第2実施形態による電動ウインチ装置1では、クラッチ58を接続状態から切断状態に切り換えることにより、ドラム20を減速機56とそれに繋がるギア機構26及び電動機22,24から切り離して自由に回転させることができる。その結果、フック装置12(図1参照)のフリーフォールを実施できる。
しかも、この第2実施形態では、クラッチ58がドラム本体40の内部空間に配置されているため、クラッチがドラムの外側に配置されている場合に比べて電動ウインチ装置1を小型化できる。
さらに、この第2実施形態では、クラッチ58がドラム20の軸方向において減速機56を挟んで電動機22,24と反対側に配置されていることにより、クラッチ58を冷却するための冷却設備やクラッチ58の電気配線を電動機22,24に係る冷却設備や電気配線と干渉することなく配置できる。このため、クラッチ58の冷却設備や電気配線のレイアウトを容易に行うことができる。
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく請求の範囲によって示され、また、請求の範囲と均等の意味及び範囲内でのすべての変更を含む。
例えば、図7及び図8に示す変形例のように、第1ブレーキ装置30を、第1電動機本体22aに対してドラム20と反対側に配置して第1電動機本体22aに固定してもよい。すなわち、第1ブレーキ装置30を、第1電動機本体22aに対してギア機構26と反対側に配置して第1電動機本体22aに固定してもよい。この場合、第1電動機本体22aのうちギア機構26と反対側の端部から第1駆動軸22bを突出させ、その突出した第1駆動軸22bの部分に第1ブレーキ装置30が制動を掛けるようにすればよい。
また、第2ブレーキ装置32を、第2電動機本体24aに対してドラム20と反対側に配置して第2電動機本体24aに固定してもよい。すなわち、第2ブレーキ装置32を、第2電動機本体24aに対してギア機構26と反対側に配置して第2電動機本体24aに固定してもよい。この場合、第2駆動軸24bのうちギア機構26と反対側の端部から第2駆動軸24bを突出させ、その突出した第2駆動軸22bの部分に第2ブレーキ装置32が制動を掛けるようにすればよい。
また、電動ウインチ装置においてドラムの軸方向における当該ドラムの一方側に配置される電動機の数は、必ずしも2つに限定されない。すなわち、3つ以上の電動機がドラムの軸方向における当該ドラムの一方側に配置されてもよい。
図9には、電動ウインチ装置1が、3つの電動機72を備えていてそれらがドラム20の軸方向における当該ドラム20の一方側に配置された変形例が示されている。この場合、電動機72と、その電動機72の駆動軸に結合されてその駆動軸と一体的に回転するギア74と、駆動軸に制動を掛けるブレーキ装置76とを1つのユニット78とし、そのユニット78をセンターギア50の周りに3つ配置して、各ユニット78のギア74をセンターギア50に噛み合わせればよい。電動機72は、上記第1実施形態の第1及び第2電動機22,24と同様のものであり、ギア74は、上記第1実施形態の第1及び第2ギア51,52と同様のものであり、ブレーキ装置76は、上記第1実施形態の第1及び第2ブレーキ装置30,32と同様のものである。
また、4つ以上のユニット78をセンターギア50の周りに同様に配置してもよい。
これらの変形例において、ブレーキ装置76は、図7及び図8の変形例の場合と同様に、電動機本体に対してドラム20と反対側に配置されてもよい。
以上のように、より多くの電動機72を設けることによって、ドラム20に付与可能なトルクを大きくすることが可能である。しかも、これらの変形例では、電動ウインチ装置1が備える全ての電動機72はドラム20の軸方向における当該ドラム20の一方側のみに配置され、それらの電動機72がドラム20の軸方向に対して直交する方向において並列に配置されるため、ドラム20の軸方向における電動ウインチ装置1の寸法が増大するのを防ぐことができ、上部旋回体4の幅の制限をクリアすることができる。
また、本発明による電動ウインチ装置は、ドラムの軸方向における当該ドラムの一方側のみに電動機が配置されたものに必ずしも限定されない。
例えば、図10に示す変形例のように、電動ウインチ装置1は、ドラム20の軸方向の一方側である第1支持部14側に配置された第1及び第2電動機22,24に加えて、ドラム20の軸方向の他方側である第2支持部16側に配置された第3電動機82を備えていてもよい。
第3電動機82は、ドラム20の軸方向において第2支持部16を挟んでドラム20と反対側に配置された第3電動機本体82aと、その第3電動機本体82aから第2軸42を貫通してドラム本体40内へ延びる第3駆動軸82bとを有する。第3電動機本体82aは、上記第1実施形態の第1電動機本体22aと同様のものである。第3駆動軸82bは、ドラム20と同軸に配置されている。
第3電動機本体82aの第2支持部16側には、第3ブレーキ装置84が配置されている。この第3ブレーキ装置84は、第3電動機本体82aに固定されている。第3ブレーキ装置84は、第3駆動軸82bのうち第3電動機本体82aからドラム20側へ突出した部分に制動を掛ける。
ドラム本体40の内部空間には、ギア機構26により合成されたトルクをドラム本体40へ伝達する伝達部28の第1減速機86と、第3駆動軸82bが入力側に接続された第2減速機88とが設けられている。
第1減速機86は、上記第1実施形態の減速機56と同様のものであるが、その減速機56が配置された位置に比べて第1支持部14寄りの位置に配置されている。
第2減速機88は、ドラム本体40の内部空間において第1減速機86とドラム20の軸方向に並んで配置されており、その第1減速機86に対して第2支持部16側に配置されている。第2減速機88の出力部は、ドラム本体40に接続されている。第2減速機88は、第3駆動軸82bの回転速度を所定の減速比で減速した回転速度でドラム本体40、すなわちドラム20を回転させる。
そして、この図10の変形例では、第1及び第2電動機本体22a,24aの軸方向の長さが、上記第1実施形態の第1及び第2電動機本体22a,24aの軸方向の長さよりも小さい。具体的には、この変形例での第1及び第2電動機本体22a,24aの軸方向の長さは、上記第1実施形態の第1及び第2電動機本体22a,24aの軸方向の長さの約半分である。第2支持部16側に第3電動機82及び第3ブレーキ装置84が設けられることにより、ドラム20の軸方向における電動ウインチ装置1の寸法が増大するが、この第1及び第2電動機本体22a,24aの長さの削減によって、電動ウインチ装置1の寸法が大幅に増大するのを抑制できる。
また、一般的に、電動機の出力トルクは、電動機本体の軸方向の長さに比例するため、図10の変形例における第1電動機22の出力トルクは、上記第1実施形態の第1電動機22の出力トルクよりも小さくなるとともに、同変形例における第2電動機24の出力トルクは、上記第1実施形態の第2電動機24の出力トルクよりも小さくなるが、それらの出力トルクの減少分以上のトルクを第3電動機82により付与できる。このため、この図10の変形例によれば、電動ウインチ装置1による吊能力を向上することが可能である。
また、図11に示す変形例のように、ドラム20の軸方向における当該ドラム20の一方側である第1支持部14側に配置された第1電動機22、第1ブレーキ装置30、第2電動機24、第2ブレーキ装置32、ギア機構26及び伝達部28からなる第1ユニット91と同様の第2ユニット92を、ドラム20の軸方向の他方側である第2支持部16側に第1ユニット91と対称になるように設けてもよい。この変形例において各ユニット91,92の構成は、図10に示した変形例における第1電動機22、第1ブレーキ装置30、第2電動機24、第2ブレーキ装置32、ギア機構26及び伝達部28からなるユニットの構成と同様である。
この変形例では、第2支持部16側に設けられた第2ユニット92が有する2つの電動機本体94a,96aの軸方向の長さは、図10の変形例の第3電動機本体82aの軸方向の長さよりも小さい。このため、この変形例では、図10の変形例の場合に比べて、ドラム20の軸方向における電動ウインチ装置1の寸法を削減できる。
一方、この変形例では、第2ユニット92の各電動機94,96の出力トルクは、図10の変形例の第3電動機82の出力トルクよりも小さくなるが、電動機94,96の数が図10の変形例に比べて多いため、第2ユニット92からドラム20に付与するトルクとしては図10の変形例の場合と同等以上のトルクを確保できる。
また、クラッチは、ギア機構とドラムとの間でトルクを伝達する伝達部において、必ずしも減速機とドラムとの間に設けられていなくてもよい。例えば、ギア機構と減速機との間に設けられていてもよい。
また、本発明による電動ウインチ装置は、対象物の巻上/巻下を行う巻上用のウインチ装置に必ずしも限定されない。例えば、本発明による電動ウインチ装置は、ブーム等の起伏部材を起伏させるための起伏用のウインチ装置であってもよい。
図12には、本発明の変形例による起伏用の電動ウインチ装置105が搭載された移動式クレーンの概略的な構成が示されている。この移動式クレーンの上部旋回体4は、その後部に立設されたガントリ106を備えている。また、この移動式クレーンは、吊作業用の作動部としての起伏装置107を備えている。
起伏装置107は、起伏部材としてのブーム8と、マスト108と、ガイライン110と、マスト側スプレッダ112aと、ガントリ側スプレッダ112bと、を備える。
マスト108は、上部旋回体4の幅方向に延びる軸回りに回動可能となるようにその上部旋回体4の前後方向の中間部に設けられている。このマスト108の先端部とブーム8の先端部とが、ガイライン110を介して接続されている。
マスト側スプレッダ112aは、マスト108の先端部に設けられており、ガントリ側スプレッダ112bは、ガントリ106の頂部に取り付けられている。
電動ウインチ装置105は、ガントリ106の基部近傍の部位に設置されている。具体的に、上記第1及び第2支持台14a,16aに対応する一対の支持台109が、上部旋回体4の幅方向に分かれて配置された状態でガントリ106の基部近傍の部位に取り付けられている。この一対の支持台109は、上記第1及び第2軸受14b,16bに対応する図略の軸受をそれぞれ支持している。その図略の軸受によって、電動ウインチ装置105のウインチドラム115(以下、単にドラム115と称する)の軸が回転自在となるように支持されている。ドラム115は、その軸方向が上部旋回体4の幅方向に一致するように配置されている。
ドラム115には、起伏ロープ116が巻かれている。このドラム115から引き出された起伏ロープ116がガントリ側スプレッダ112bとマスト側スプレッダ112aに掛け回されている。ドラム115は、回転して起伏ロープ116の巻き取り/繰り出しを行うことにより、ブーム8が起伏するように起伏装置107に吊作業のための動作を行わせる。
具体的に、ドラム115は、起伏ロープ116を巻き取るように回転することにより、マスト側スプレッダ112aをガントリ側スプレッダ112b側に引き寄せ、それによってマスト108を後方へ回動させるとともにガイライン110を介してブーム8の先端部を後方へ引っ張る。これにより、ブーム8が後方へ回動しつつ起立する。一方、ドラム115は、起伏ロープ116を繰り出すように回転することにより、マスト側スプレッダ112aがガントリ側スプレッダ112bから前方へ離間することを許容し、それによって、ブーム8がガイライン110を介してマスト108によって支持されながら前方へ回動しつつ倒伏する。
起伏用の電動ウインチ装置105の上記以外の構成としては、上記した電動ウインチ装置1の種々の構成と同様の構成が適用される。それによって、この変形例においても、上記電動ウインチ装置1によって得られる効果と同様の効果が得られる。
また、本発明による移動式クレーンは、クローラクレーンに限定されるものではない。例えば、ホイール式の下部走行体を有するホイールクレーンであっても、本発明を同様に適用可能である。
[実施の形態の概要]
前記実施形態をまとめると、以下の通りである。
前記実施形態をまとめると、以下の通りである。
前記実施形態による電動ウインチ装置は、吊作業用の作動部を備えた移動式クレーンに搭載され、前記作動部に繋がるロープの巻き取り又は繰り出しを行うことにより前記作動部に吊作業のための動作を行わせる電動ウインチ装置であって、中心軸を有していてその中心軸回りに回転可能となるように前記移動式クレーンに設けられ、前記ロープが巻かれたウインチドラムと、前記ウインチドラムの前記中心軸が延びる方向である軸方向において前記ウインチドラムの一方側に配置されるとともに前記ウインチドラムの軸方向と直交する方向に並ぶ複数の電動機と、前記複数の電動機の各々から出力されるトルクを合成するギア機構と、前記ギア機構により合成されたトルクを前記ウインチドラムに伝達して前記ウインチドラムを回転させて、前記ウインチドラムに前記ロープの巻き取り又は繰り出しを行わせる伝達部と、を備える。
この電動ウインチ装置では、ギア機構が複数の電動機の各々から出力されるトルクを合成し、伝達部がそのギア機構により合成されたトルクをウインチドラムに伝達するため、大きなトルクでウインチドラムを回転させることができる。このため、電動ウインチ装置による大きな吊能力を確保できる。しかも、この電動ウインチ装置では、ウインチドラムの軸方向における当該ウインチドラムの一方側に複数の電動機が配置されるとともに、それらの複数の電動機がウインチドラムの軸方向と直交する方向に並ぶため、仮にその複数の電動機がウインチドラムの軸方向の両側に分かれて配置される場合に比べて、電動ウインチ装置をウインチドラムの軸方向において小型化することができる。このため、電動ウインチ装置が移動式クレーンに搭載された場合に移動式クレーンの寸法を増大させることがなく、移動式クレーンの寸法の制限をクリアすることが可能となる。
前記電動ウインチ装置において、前記複数の電動機は、前記電動ウインチ装置が備える全ての電動機であることが好ましい。
この構成によれば、電動ウインチ装置が備える全ての電動機はウインチドラムの軸方向における当該ウインチドラムの一方側のみに配置されるため、電動ウインチ装置が多くの電動機を備える場合であってもウインチドラムの軸方向においてその電動ウインチ装置を小型化することができる。
前記電動ウインチ装置において、前記伝達部は、前記ギア機構と前記ウインチドラムとの間でトルクを伝達する接続状態と、前記ギア機構と前記ウインチドラムとの間でのトルクの伝達が遮断されるように前記ギア機構と前記ウインチドラムとを互いに切り離す切断状態とに切り換わるクラッチを有することが好ましい。
この構成では、クラッチを切断状態にすることにより、ウインチドラムをギア機構とそれに繋がる電動機から切り離して自由に回転させることができる。このため、対象物のフリーフォールを実施できる。
前記電動ウインチ装置において、前記ギア機構は、前記複数の電動機の各々から出力されるトルクを合成したトルクで回転する出力部を有し、前記伝達部は、前記ウインチドラムを前記出力部の回転速度よりも低い回転速度で回転させる減速機を有することが好ましい。
この構成によれば、ギア機構の出力部の回転速度よりも低い回転速度でウインチドラムを回転させることができる。しかも、この構成では、減速機がウインチドラムの内側に配置されているため、減速機がウインチドラムの外側に配置されている場合よりも電動ウインチ装置を小型化できる。
この場合において、前記伝達部は、前記減速機と前記ウインチドラムとの間でトルクを伝達する接続状態と、前記減速機と前記ウインチドラムとの間でのトルクの伝達が遮断されるように前記減速機と前記ウインチドラムとを互いに切り離す切断状態とに切り換わるクラッチを有し、前記クラッチは、前記ウインチドラムの軸方向において前記減速機を挟んで前記電動機と反対側で且つ前記ウインチドラムの内側に配置されていることが好ましい。
この構成では、クラッチを切断状態にすることにより、ウインチドラムを減速機とそれに繋がるギア機構及び電動機から切り離して自由に回転させることができ、その結果、対象物のフリーフォールを実施できる。しかも、この構成では、クラッチがウインチドラムの内側に配置されているため、クラッチがウインチドラムの外側に配置されている場合よりも電動ウインチ装置を小型化できる。また、クラッチがウインチドラムの軸方向において減速機を挟んで電動機と反対側に配置されていることにより、クラッチを冷却するための冷却設備やクラッチに繋がる電気配線を電動機に係る設備と干渉することなく配置できる。このため、クラッチの冷却設備や電気配線のレイアウトを容易に行うことができる。
前記電動ウインチ装置において、前記複数の電動機の各々は、前記ギア機構に接続された駆動軸と、その駆動軸を回転させる電動機本体とを有し、前記ギア機構及び前記伝達部は、前記駆動軸のトルクを増大させて前記ウインチドラムに伝達するように構成され、前記電動ウインチ装置は、前記複数の電動機の各々の前記駆動軸に対して制動を掛ける複数のブレーキ装置をさらに備えることが好ましい。
この構成では、各ブレーキ装置が対応する電動機の駆動軸に制動を掛けることにより、ウインチドラムの回転を制動することができる。しかも、この構成では、複数のブレーキ装置を備えているため、仮にいずれかのブレーキ装置が故障して制動力を発揮できなくなった場合であっても、残りのブレーキ装置で制動力をある程度確保できる。このため、ウインチドラムの回転に対する制動の信頼性を向上できる。さらに、この構成では、ギア機構及び伝達部が電動機の駆動軸のトルクを増大させてウインチドラムに伝達するようになっているが、そのトルクの伝達の流れにおいて最も上手側に位置する各電動機の駆動軸に対して各ブレーキ装置が制動を掛けるから、各ブレーキ装置は小さい制動力でウインチドラムの回転を制動できる。換言すれば、ウインチドラムの回転を制動するのに各ブレーキ装置に必要とされる制動力は小さくて済む。このため、各ブレーキ装置として、制動能力が小さい小型のものを用いることができ、ブレーキ装置を設けることによる電動ウインチ装置の大型化を防ぐことができる。
本発明による移動式クレーンは、前記電動ウインチ装置を備えた移動式クレーンである。
この移動式クレーンは、前記電動ウインチ装置を備えることにより、大きな吊能力を確保しつつ、寸法の制限をクリアすることができる。
以上説明したように、前記実施形態によれば、大きな吊能力を確保しつつ、移動式クレーンの寸法の制限をクリアすることが可能な電動ウインチ装置及び移動式クレーンを提供することができる。
Claims (7)
- 吊作業用の作動部を備えた移動式クレーンに搭載され、前記作動部に繋がるロープの巻き取り又は繰り出しを行うことにより前記作動部に吊作業のための動作を行わせる電動ウインチ装置であって、
中心軸を有していてその中心軸回りに回転可能となるように前記移動式クレーンに設けられ、前記ロープが巻かれたウインチドラムと、
前記ウインチドラムの前記中心軸が延びる方向である軸方向において前記ウインチドラムの一方側に配置されるとともに前記ウインチドラムの軸方向と直交する方向に並ぶ複数の電動機と、
前記複数の電動機の各々から出力されるトルクを合成するギア機構と、
前記ギア機構により合成されたトルクを前記ウインチドラムに伝達して前記ウインチドラムを回転させて、前記ウインチドラムに前記ロープの巻き取り又は繰り出しを行わせる伝達部と、を備える、電動ウインチ装置。 - 請求項1に記載の電動ウインチ装置において、
前記複数の電動機は、前記電動ウインチ装置が備える全ての電動機である、電動ウインチ装置。 - 請求項1又は2に記載の電動ウインチ装置において、
前記伝達部は、前記ギア機構と前記ウインチドラムとの間でトルクを伝達する接続状態と、前記ギア機構と前記ウインチドラムとの間でのトルクの伝達が遮断されるように前記ギア機構と前記ウインチドラムとを互いに切り離す切断状態とに切り換わるクラッチを有する、電動ウインチ装置。 - 請求項1又は2に記載の電動ウインチ装置において、
前記ギア機構は、前記複数の電動機の各々から出力されるトルクを合成したトルクで回転する出力部を有し、
前記伝達部は、前記ウインチドラムを前記出力部の回転速度よりも低い回転速度で回転させる減速機を有する、電動ウインチ装置。 - 請求項4に記載の電動ウインチ装置において、
前記伝達部は、前記減速機と前記ウインチドラムとの間でトルクを伝達する接続状態と、前記減速機と前記ウインチドラムとの間でのトルクの伝達が遮断されるように前記減速機と前記ウインチドラムとを互いに切り離す切断状態とに切り換わるクラッチを有し、
前記クラッチは、前記ウインチドラムの軸方向において前記減速機を挟んで前記電動機と反対側で且つ前記ウインチドラムの内側に配置されている、電動ウインチ装置。 - 請求項1~5のいずれか1項に記載の電動ウインチ装置において、
前記複数の電動機の各々は、前記ギア機構に接続された駆動軸と、その駆動軸を回転させる電動機本体とを有し、
前記ギア機構及び前記伝達部は、前記駆動軸のトルクを増大させて前記ウインチドラムに伝達するように構成され、
前記電動ウインチ装置は、前記複数の電動機の各々の前記駆動軸に対して制動をかける複数のブレーキ装置をさらに備える、電動ウインチ装置。 - 請求項1~6のいずれか1項に記載の電動ウインチ装置を備えた、移動式クレーン。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP15866011.8A EP3228578B1 (en) | 2014-12-05 | 2015-11-27 | Electric winch device and mobile crane |
| US15/532,821 US10189687B2 (en) | 2014-12-05 | 2015-11-27 | Electric winch device and mobile crane |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014-246741 | 2014-12-05 | ||
| JP2014246741A JP6404694B2 (ja) | 2014-12-05 | 2014-12-05 | 電動ウインチ装置及び移動式クレーン |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016088662A1 true WO2016088662A1 (ja) | 2016-06-09 |
Family
ID=56091607
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/083341 WO2016088662A1 (ja) | 2014-12-05 | 2015-11-27 | 電動ウインチ装置及び移動式クレーン |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10189687B2 (ja) |
| EP (1) | EP3228578B1 (ja) |
| JP (1) | JP6404694B2 (ja) |
| WO (1) | WO2016088662A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109132871A (zh) * | 2018-11-09 | 2019-01-04 | 三门正乐电气有限公司 | 一种桥门式起重机变频控制器 |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE202013000627U1 (de) * | 2013-01-22 | 2014-04-23 | Liebherr-Components Biberach Gmbh | Seilwinde |
| US20180111806A1 (en) * | 2016-10-24 | 2018-04-26 | Ingersoll-Rand Company | Dual capacity winch using two motors and a single gearbox and drum |
| US10519013B2 (en) * | 2017-02-28 | 2019-12-31 | Lockheed Martin Corporation | Winch system for an airborne payload control system |
| US10508715B2 (en) | 2017-03-06 | 2019-12-17 | Cameron International Corporation | Motor assembly for drawworks systems and methods |
| US10464791B2 (en) * | 2017-03-06 | 2019-11-05 | Cameron International Corporation | Drawworks systems and methods |
| IT201700046131A1 (it) * | 2017-04-28 | 2018-10-28 | Dana Brevini S P A | Argano a struttura semplificata |
| DE202017105348U1 (de) * | 2017-09-05 | 2018-12-07 | Liebherr-Components Biberach Gmbh | Freifallwinde |
| WO2019118352A1 (en) | 2017-12-11 | 2019-06-20 | Schlumberger Technology Corporation | Air cooled variable-frequency drive |
| US10618782B2 (en) * | 2017-12-21 | 2020-04-14 | Intradin(Shanghai) Machinery Co., Ltd | Electric winch |
| US11014791B2 (en) * | 2018-04-05 | 2021-05-25 | Vermeer Manufacturing Company | Self-raising winch boom and control systems and methods associated therewith |
| US10697254B2 (en) | 2018-04-10 | 2020-06-30 | Cameron International Corporation | Drawworks system with variable frequency drive |
| CN110255413B (zh) * | 2019-04-24 | 2021-04-13 | 武汉船用机械有限责任公司 | 爬绳块定位安装方法 |
| CN113226929B (zh) * | 2019-09-03 | 2024-08-16 | 乐天集团股份有限公司 | 无人飞行装置、货物下降装置及货物搬送方法 |
| CN111039208B (zh) * | 2019-12-10 | 2021-02-09 | 长沙海川自动化设备有限公司 | 变频起升机构及塔机 |
| US11186468B2 (en) * | 2020-04-08 | 2021-11-30 | Comeup Industries Inc. | Winch capable of externally connecting motor to increase dynamic power |
| TWI810467B (zh) * | 2020-06-18 | 2023-08-01 | 惠亞工程股份有限公司 | 組合式高空作業升降機台 |
| CN112723208B (zh) * | 2020-12-22 | 2022-07-15 | 青岛核工机械有限公司 | 一种可以实现垂直位移波浪补偿功能的减速机 |
| CA3153573A1 (en) * | 2021-04-01 | 2022-10-01 | Breeze-Eastern Llc | Hoist system and process implementing slip detection |
| CN113460868B (zh) * | 2021-08-11 | 2023-12-08 | 绍兴南特起重设备有限公司 | 一种海上平台用的双动力悬臂吊 |
| DE102022126670A1 (de) | 2022-10-13 | 2024-04-18 | Liebherr-Components Biberach Gmbh | Zahnkranzseilwinde |
| CN116317343B (zh) * | 2023-05-17 | 2023-08-04 | 河南中鼎智建科技有限公司 | 一种大扭矩电机系统及起重机 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005047717A (ja) * | 2004-11-15 | 2005-02-24 | Kobelco Cranes Co Ltd | 油圧ウィンチ |
| JP2005263420A (ja) * | 2004-03-18 | 2005-09-29 | Kitagawa Iron Works Co Ltd | ウインチの構造 |
| JP2008247583A (ja) * | 2007-03-30 | 2008-10-16 | Ihi Corp | クレーン用ウインチ装置 |
| US20100242824A1 (en) * | 2007-11-09 | 2010-09-30 | Selden Mast Ab | Device at a Line Winch |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2271428A (en) * | 1939-01-12 | 1942-01-27 | Robert J Harry | Hoist crane construction |
| US2345662A (en) * | 1942-02-23 | 1944-04-04 | Freyn Engineering Co | Skip hoist |
| US3757524A (en) * | 1972-02-17 | 1973-09-11 | Chance Co Ab | Multiple speed hydraulic gear motor driven gear unit |
| US4328954A (en) * | 1979-05-07 | 1982-05-11 | Pettibone Corporation | Winch with compact, high efficiency and high ratio gearing suitable for free fall |
| US20020171072A1 (en) * | 2001-05-18 | 2002-11-21 | Lin Tso-Kuo | Two speed windlass |
| DE10208370A1 (de) * | 2002-02-27 | 2003-09-11 | Wirth Co Kg Masch Bohr | Hebewerk |
| CN2811252Y (zh) * | 2005-04-06 | 2006-08-30 | 上海振华港口机械(集团)股份有限公司 | 双40英尺岸边集装箱起重机双起升机构 |
| US7489098B2 (en) * | 2005-10-05 | 2009-02-10 | Oshkosh Corporation | System for monitoring load and angle for mobile lift device |
| US20080001132A1 (en) * | 2006-06-16 | 2008-01-03 | Shih Jyi Huang | Electric winch |
| FR2919280B1 (fr) * | 2007-07-24 | 2010-02-19 | Soc Et De Rech Et Dev D Automa | Treuil pour la traction de cables, en particulier de cables synthetiques employes en offshore. |
| US8517348B2 (en) * | 2010-02-05 | 2013-08-27 | Frederick L. Smith | Windlass system and method |
| US8936167B2 (en) * | 2010-12-17 | 2015-01-20 | Kobelco Cranes Co., Ltd. | Crane |
| NO334469B1 (no) * | 2012-03-27 | 2014-03-10 | I P Huse As | Fremgangsmåte ved drift av vinsj for håndtering av last med en line, konstruksjon samt anvendelse |
| WO2014152323A1 (en) * | 2013-03-20 | 2014-09-25 | Axon Ep, Inc. | Drawworks system |
| DK178120B1 (en) * | 2013-04-18 | 2015-06-01 | A P Møller Mærsk As | An Offshore Floating Vessel and a Method of Operating the Same |
| US9873600B2 (en) * | 2014-04-04 | 2018-01-23 | David R. Hall | Motorized lifting device with isolated logistics and power electronics |
| JP6325801B2 (ja) * | 2013-11-20 | 2018-05-16 | 株式会社神戸製鋼所 | 電動ウインチ装置 |
| JP6271364B2 (ja) * | 2014-07-25 | 2018-01-31 | 株式会社神戸製鋼所 | 電動ウインチ装置 |
| US9796564B2 (en) * | 2015-03-02 | 2017-10-24 | Kobe Steel, Ltd. | Crane |
-
2014
- 2014-12-05 JP JP2014246741A patent/JP6404694B2/ja not_active Expired - Fee Related
-
2015
- 2015-11-27 US US15/532,821 patent/US10189687B2/en active Active
- 2015-11-27 WO PCT/JP2015/083341 patent/WO2016088662A1/ja active Application Filing
- 2015-11-27 EP EP15866011.8A patent/EP3228578B1/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005263420A (ja) * | 2004-03-18 | 2005-09-29 | Kitagawa Iron Works Co Ltd | ウインチの構造 |
| JP2005047717A (ja) * | 2004-11-15 | 2005-02-24 | Kobelco Cranes Co Ltd | 油圧ウィンチ |
| JP2008247583A (ja) * | 2007-03-30 | 2008-10-16 | Ihi Corp | クレーン用ウインチ装置 |
| US20100242824A1 (en) * | 2007-11-09 | 2010-09-30 | Selden Mast Ab | Device at a Line Winch |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3228578A4 * |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109132871A (zh) * | 2018-11-09 | 2019-01-04 | 三门正乐电气有限公司 | 一种桥门式起重机变频控制器 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170362067A1 (en) | 2017-12-21 |
| EP3228578A1 (en) | 2017-10-11 |
| EP3228578A4 (en) | 2017-12-06 |
| US10189687B2 (en) | 2019-01-29 |
| JP2016108085A (ja) | 2016-06-20 |
| JP6404694B2 (ja) | 2018-10-10 |
| EP3228578B1 (en) | 2020-09-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6404694B2 (ja) | 電動ウインチ装置及び移動式クレーン | |
| CN105164045B (zh) | 缆索绞车 | |
| JP5676119B2 (ja) | クレーンのための旋回駆動装置 | |
| JP2008127150A (ja) | クレーン | |
| CN104925673B (zh) | 一种多起重机联合作业辅助起吊装置及方法 | |
| JP5014545B2 (ja) | 2つの牽引ケーブル(tractioncable)を有する巻上装置(hoist)用力バランス装置及びかかる装置を装着した巻上装置 | |
| JP2008030885A (ja) | エレベータのリニューアル方法 | |
| GB2439133A (en) | Lifting and rotating mechanism | |
| JP6090739B2 (ja) | 高架線走行装置および高架線走行装置用アシスト装置 | |
| JP6243746B2 (ja) | 油圧集材機 | |
| CN104261293A (zh) | 四卷筒抓斗卸船机卷筒单动换绳系统及换绳方法 | |
| JP5255884B2 (ja) | コンテナクレーンの巻き上げ装置 | |
| CN105110222A (zh) | 一种行星轮系内置式建筑卷扬机设备 | |
| JP3436157B2 (ja) | クローラクレーン | |
| CN102389911B (zh) | 用于安装钢丝绳的设备和工程车辆 | |
| JP5385601B2 (ja) | クレーン | |
| CN204999536U (zh) | 一种行星轮系内置式建筑卷扬机设备 | |
| CN204057826U (zh) | 四卷筒抓斗卸船机卷筒单动换绳系统 | |
| JP2005263420A (ja) | ウインチの構造 | |
| WO2020129864A1 (ja) | ジブ係留装置 | |
| JP4108176B2 (ja) | 自由落下式クレーン | |
| JP2020158254A (ja) | クレーン | |
| JP7452579B2 (ja) | クレーン | |
| JP2004277165A (ja) | 自走式油圧クレーン | |
| JP5789181B2 (ja) | 建設機械の旋回装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15866011 Country of ref document: EP Kind code of ref document: A1 |
|
| REEP | Request for entry into the european phase |
Ref document number: 2015866011 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15532821 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |