WO2016075935A1 - 触感呈示装置 - Google Patents
触感呈示装置 Download PDFInfo
- Publication number
- WO2016075935A1 WO2016075935A1 PCT/JP2015/005625 JP2015005625W WO2016075935A1 WO 2016075935 A1 WO2016075935 A1 WO 2016075935A1 JP 2015005625 W JP2015005625 W JP 2015005625W WO 2016075935 A1 WO2016075935 A1 WO 2016075935A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- panel
- displacement
- actuator
- tactile sensation
- providing apparatus
- Prior art date
Links
Images












Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/016—Input arrangements with force or tactile feedback as computer generated output to the user
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2203/00—Indexing scheme relating to G06F3/00 - G06F3/048
- G06F2203/041—Indexing scheme relating to G06F3/041 - G06F3/045
- G06F2203/04105—Pressure sensors for measuring the pressure or force exerted on the touch surface without providing the touch position
Definitions
- the present invention relates to a tactile sensation presentation apparatus.
- Patent Document 1 discloses a technique for presenting a realistic tactile sensation to a contact object such as a finger on a panel such as a touch panel.
- the tactile sensation providing apparatus disclosed in Patent Document 1 presents the operator with a pressing feeling of “pressed” by vibrating the panel in the thickness direction.
- Conventionally known tactile sensation presentation devices may not exhibit a good tactile sensation depending on the structure of the vibration part that vibrates the panel, because the amount of displacement of the panel is small or the vibration of the panel is difficult to be transmitted to the user. Since there are cases, there is room for improvement in the device configuration.
- An object of the present invention made in view of such circumstances is to provide an improved tactile sensation providing apparatus.
- a tactile sensation providing apparatus includes: A panel, An actuator, A converter that engages with the panel and the actuator, converts a displacement direction and a displacement amount of the actuator into a different displacement direction and a different displacement amount by displacement of the actuator, and displaces the panel;
- the displacement direction of the panel is the thickness direction of the panel, The displacement direction of the actuator and the displacement direction of the panel intersect each other.
- the conversion unit may include a rotation member that is rotated by displacement of the actuator to displace the panel.
- the conversion unit has a slope extending in a direction intersecting with a displacement direction of the actuator, a linearly moving member that linearly moves in the displacement direction of the actuator by the displacement of the actuator, and the slope according to the displacement of the linearly moving member. And a sliding member that displaces the panel.
- a housing having an upper housing and a lower housing joined by a joint having elasticity
- the panel is supported by the upper housing and is engaged in a state in which a pressure is applied to the conversion portion by the elastic force of the joint portion
- the actuator and the conversion unit may be supported by the lower housing, and the conversion unit may be engaged in a state where a pressure is applied to the actuator.
- a tactile sensation providing apparatus includes: A panel, An actuator for displacing the panel in the thickness direction of the panel; A restricting portion for restricting displacement of the panel.
- the actuator may displace the panel on the back surface of the panel by displacing at least two points sandwiching the center of gravity of the panel in a plan view of the tactile sensation providing apparatus.
- a conversion unit that engages with the panel and the actuator, converts the displacement direction and the displacement amount of the actuator into a different displacement direction and a different displacement amount according to the displacement of the actuator, and displaces the panel may be provided.
- the actuator may include a multilayer piezoelectric element.
- an improved tactile sensation presentation apparatus can be provided.
- FIG. 1 is an external perspective view showing a schematic configuration of a tactile sensation providing apparatus according to a first embodiment of the present invention. It is a top view which shows the example of arrangement
- FIG. 1 is an external perspective view showing a schematic configuration of the tactile sensation providing apparatus according to the first embodiment of the present invention.
- the tactile sensation providing apparatus 10 is realized as an electronic device having other functions such as a mobile phone such as a smartphone, a portable music player, a notebook computer, a wristwatch, a tablet terminal, and a game machine.
- the tactile sensation providing apparatus 10 includes a housing 20 whose external shape is a substantially rectangular shape.
- the housing 20 includes an upper housing 20a and a lower housing 20b.
- the upper housing 20a and the lower housing 20b are joined together by a joint portion 23 made of an elastic member to form one housing 20.
- the joint portion 23 may be configured as a waterproof tape, sponge, or the like.
- the upper housing 20a and the lower housing 20b are joined to each other via a joint 23 so as to be displaceable.
- the upper housing 20a and the lower housing 20b may be displaced along a guide that restricts the displacement direction to the thickness direction of the housing 20.
- the housing 20 is made of metal or hard plastic.
- a panel 30 is disposed on the front surface 21 side of the housing 20 in the upper housing 20a. Further, as shown in FIG. 1 with a part of the panel 30 cut away, a display unit 40 is held inside the housing 20 on the lower side of the panel 30.
- the housing 20 includes an actuator and a conversion unit inside.
- the panel 30 includes a touch panel that detects contact, a cover panel that protects the display unit 40, and the like.
- the panel 30 is formed, for example, in a rectangular shape from a synthetic resin such as glass or acrylic.
- a contact object such as an operator's finger, pen, or stylus pen.
- a detection method of the touch panel an arbitrary method such as a capacitance method, a resistance film method, a surface acoustic wave method (or an ultrasonic method), an infrared method, an electromagnetic induction method, or a load detection method can be used.
- panel 30 is a touch panel.
- the panel 30 may be configured integrally with the display unit 40.
- the region excluding the peripheral portion of the panel surface 30 a is exposed from the opening 21 a formed in the surface 21 of the housing 20.
- the display unit 40 is configured using, for example, a liquid crystal display, an organic EL display, an inorganic EL display, electronic paper, or the like.
- the display unit 40 displays images (pages), input objects such as icons and push buttons in application software (hereinafter simply referred to as “applications”) such as browsers and electronic books.
- applications application software
- FIG. 2 is a plan view showing an arrangement example of actuators in the lower housing 20b, with the upper housing 20a removed. As shown in FIG. 2, four actuators 50 are arranged in the lower housing 20b.
- the actuator 50 constitutes a drive source for displacing the panel 30 and is constituted by using, for example, a piezoelectric element 51.
- the piezoelectric element 51 is an element that expands or contracts or bends according to an electromechanical coupling coefficient of a constituent material by applying an electric signal (voltage). These elements are made of, for example, ceramic or quartz.
- the piezoelectric element 51 may be a unimorph, bimorph, or multilayer piezoelectric element.
- the laminated piezoelectric element includes a laminated bimorph element in which bimorphs are laminated, or a laminate of a plurality of dielectric layers made of PZT (lead zirconate titanate), for example, and an electrode layer disposed between the plurality of dielectric layers.
- the piezoelectric element 51 is formed of a stack type stacked piezoelectric element.
- One end of the piezoelectric element 51 is fixed to the fixing portion 24 provided in the lower housing 20b, and is arranged to extend substantially parallel to the longitudinal direction of the lower housing 20b.
- the fixing portion 24 is disposed on the center side of the lower housing 20b with respect to the extending direction of each piezoelectric element 51. Accordingly, the piezoelectric element 51 expands and contracts substantially parallel to the longitudinal direction of the lower housing 20b.
- a pair of guide members 22 are arranged in the lower housing 20b so as to sandwich each piezoelectric element 51 therebetween.
- the piezoelectric element 51 engages with the conversion unit 60 on the end surface on the other end side that is not fixed to the fixing unit 24.
- a specific configuration of the conversion unit 60 will be described in detail in the description of FIG.
- the conversion unit 60 is held in the lower housing 20b so as to engage with the panel 30 in the vicinity of the four corners of the lower housing 20b, which is out of the display area D of the display unit 40 indicated by phantom lines in FIG. .
- the portion of the conversion unit 60 that engages with the panel 30 is displayed as a shaded area on a part of the conversion unit 60.
- FIG. 3 is a cross-sectional view showing a schematic configuration of a main part of the tactile sensation providing apparatus 10.
- the piezoelectric element 51 is supported by the guide member 22 at the bottom of the lower housing 20b.
- the conversion unit 60 is arranged to engage with the panel back surface 30 b on the inner side of the housing 20 of the panel 30 and the end surface of the other end of the piezoelectric element 51.
- the conversion unit 60 converts the displacement direction and the displacement amount into different displacement directions and different displacement amounts by the expansion / contraction displacement of the piezoelectric element 51, and displaces the panel 30.
- the conversion unit 60 has a rotating member 61.
- the rotating member 61 includes an engaging portion 61a that is rotatably engaged with the fixed shaft 62, an abutting portion 61b with which the piezoelectric element 51 abuts, and an abutting portion 61c with which the panel back surface 30b of the panel 30 abuts.
- the locking portion 61a is formed in a hook shape, and the contact portions 61b and 61c are formed in a protruding shape.
- the panel 30 is supported by the upper casing 20a, and pressure is applied to the conversion section 60 in the inner direction of the casing 20 (downward in FIG. 3) at the contact portion 61c by the elastic force of the joint section 23. Engaged in a state.
- the actuator 50 and the conversion unit 60 are supported by the lower housing 20b, and the conversion unit 60 is engaged in a state where pressure is applied to the actuator 50 at the contact portion 61b.
- FIG. 4 is an enlarged view of the conversion unit 60.
- the fulcrum indicates the fixed shaft 62 with which the locking portion 61 a of the rotating member 61 is engaged
- the force point indicates the abutting portion 61 b of the rotating member 61 with which the piezoelectric element 51 abuts
- the operating point is the panel 30.
- the contact part 61c with which the panel back surface 30b contacts is shown.
- the input displacement amount input to the force point by the displacement of the piezoelectric element 51 is S
- the throwing input is T
- the displacement amount acting on the action point is D
- the generated force is F
- the distance from the fulcrum to the action point is L2
- the displacement amount D and the generated force F can be approximated by the following equations (1) and (2).
- L1 and L2 are sufficiently larger than S and D, respectively.
- D S ⁇ L2 / L1
- F T ⁇ L1 / L2
- the laminated piezoelectric element 51 has a large throwing input T but a small throwing displacement amount S. Therefore, the general piezoelectric element 51 may not easily present a tactile sensation that can be detected well by the operator.
- the displacement amount D of the panel 30 that can present a tactile sensation by the conversion unit 60 is larger than the input displacement amount S. Therefore, the tactile sensation providing apparatus 10 can easily present a good tactile sensation.
- the angle formed between the expansion / contraction displacement direction of the piezoelectric element 51 and the displacement direction of the panel 30, that is, the conversion angle of the expansion / contraction displacement direction of the piezoelectric element 51 is not limited to 90 degrees and can be arbitrarily set.
- the rotating member 61 shown in FIG. 5A has a locking portion 61a formed in a hook shape and contact portions 61b and 61c formed on both fan-shaped side surfaces.
- the rotating member 61 shown in FIG. 5 (b) has a fan-shaped polygonal shape as a whole, and a locking portion 61a having an opening larger in diameter than the fixed shaft 62 is formed at the fan-shaped apex portion. Abutting portions 61b and 61c are formed on both side surfaces.
- the rotating member 61 shown in FIG. 5C has an L shape as a whole, an L-shaped inner corner portion forms a locking portion 61a, and contact portions 61b and 61c are formed on the outer surface. It is.
- L1: L2 that is, D: S and T: F can be maintained almost constant. Therefore, the panel 30 can be stably displaced over a long period of time under the initial conditions without being affected by wear.
- the tactile sensation providing apparatus 10 detects contact or pressing of the panel 30 with a contact object such as an operator's finger, pen, or stylus pen, and causes the piezoelectric element 51 to expand and contract. As a result, the panel 30 is displaced, and the tactile sensation is fed back to the operator.
- a contact object such as an operator's finger, pen, or stylus pen
- the piezoelectric element 51 in the present embodiment also functions as a press detection unit that detects a press on the panel 30 by the operator.
- the function of the piezoelectric element 51 as a pressing detection unit will be described with reference to FIG. 3 again.
- the tactile sensation providing apparatus 10 may include a pressure detection unit such as a pressure detection piezoelectric element or a strain sensor, in addition to the piezoelectric element 51.
- the tactile sensation providing apparatus 10 configured as an electronic device such as a mobile phone
- a pressure by the input operation is input to the panel 30.
- the upper housing 20a in which the panel 30 is disposed is displaced in the direction of the lower housing 20b against the elastic force of the joint portion 23 formed of an elastic member, the contact portion 61c is displaced downward.
- the rotating member 61 rotates clockwise with the fixed shaft 62 as a fulcrum.
- the displacement direction by the panel 30 is converted by the conversion unit 60 by approximately 90 degrees and transmitted to the piezoelectric element 51, and the piezoelectric element 51 is displaced so as to contract in the left direction.
- the piezoelectric element 51 has electrical characteristics corresponding to the magnitude of the load (force) applied to the pressure from the contact portion 61b (or the speed (acceleration) at which the magnitude of the load (force) changes). Outputs the magnitude of voltage (voltage value (hereinafter referred to as data based on pressing)). Data based on the pressure output from the piezoelectric element 51 is transmitted to the control unit of the tactile sensation providing apparatus 10, and it is detected that the pressure (input) corresponding to the data is made. Thus, the piezoelectric element 51 can be used for pressing detection as well as tactile sensation presentation.
- FIG. 6 is a functional block diagram showing a circuit configuration of a main part of the tactile sensation providing apparatus 10 of FIG.
- the tactile sensation providing apparatus 10 includes a control unit 70, a storage unit 71, a piezoelectric element driving unit 72, the panel 30, the display unit 40, and the piezoelectric element 51 described above.
- the control unit 70 is a processor that controls and manages the entire apparatus including the functional blocks of the tactile sensation providing apparatus 10.
- the control unit 70 includes a processor such as a CPU (Central Processing Unit) that executes a program that defines a control procedure.
- a program is stored, for example, in the storage unit 71 or an external storage medium.
- the storage unit 71 is composed of a semiconductor memory or the like, and stores various information and programs for operating the tactile sensation providing apparatus 10 and also functions as a work memory.
- the piezoelectric element driving unit 72 generates an electrical signal to be applied to the piezoelectric element 51 based on a control signal from the control unit 70 and applies the electrical signal to the piezoelectric element 51.
- the display unit 40 displays an image (page) in the application, an input object such as an icon or a push button, and the like under the control of the control unit 70.
- the panel 30 detects contact by an object with respect to the object displayed on the display unit 40.
- the output of the panel 30 is supplied to the control unit 70, and the position of contact of the contact object with the panel 30 is detected.
- the control unit 70 detects contact by the contact object with respect to the input object displayed on the display unit 40 based on the output of the panel 30, and presses the panel 30 based on the output (data based on the pressure) of the piezoelectric element 51.
- the piezoelectric element driving unit 72 drives the piezoelectric element 51 with a predetermined driving pattern. By driving the piezoelectric element 51, the panel 30 is displaced, and the tactile sensation of operating the input object is presented to the operator.
- the drive pattern of the piezoelectric element 51 can be stored in the storage unit 71 in accordance with, for example, an input object in which contact with a contact object is detected. For example, in the case of presenting a tactile sensation when a push button is pressed, a driving pattern in which a half-cycle pulsed driving voltage having a predetermined frequency is applied to the piezoelectric element 51 to cause the panel 30 to be displaced once and again. In addition, a driving pattern in which a plurality of cycles of the panel 30 are reciprocally displaced by applying a driving voltage of a plurality of cycles having a predetermined frequency to the piezoelectric element 51 in accordance with the input object may be used.
- the expansion / contraction displacement parallel to the panel 30 by the piezoelectric element 51 can be converted into the displacement in the thickness direction of the panel 30.
- the displacement amount of the piezoelectric element 51 can be converted into a larger displacement amount by the conversion unit 60 and the panel 30 can be displaced. Therefore, compared with the case where the piezoelectric element 51 is arranged in the thickness direction of the apparatus, the panel 30 can be displaced by a larger displacement amount, and it becomes easy to present a good tactile sensation in the thickness direction.
- the apparatus can be easily configured as compared with the case where the piezoelectric element 51 for detecting pressure on the panel 30 is separately provided. Further, since it is not necessary to hold the rotating member 61 tightly on the fixed shaft 62, the degree of freedom of the shape of the rotating member 61 can be improved, the assembling property of the conversion unit 60 can be improved, and the rotating member 61 can be fixed.
- the panel 30 can be stably displaced over a long period of time under the initial conditions without being affected by the wear of the engaging portion with the shaft 62.
- the piezoelectric element 51 is arranged in the longitudinal direction of the housing 20, that is, in the side view of the tactile sensation providing device 10, so that the displacement direction of the piezoelectric element 51 intersects the displacement direction of the panel 30.
- the size of the device in the thickness direction can be reduced, and downsizing is possible.
- the tactile sensation providing apparatus 10 includes four piezoelectric elements 51, and the conversion unit 60 engaged with each piezoelectric element 51 is in contact with the panel 30 in the vicinity of the four corners of the housing 20. Displace the whole to present a tactile sensation. Therefore, the tactile sensation providing apparatus 10 can present the tactile sensation with a smaller force as compared with the case where the tactile sensation is presented by bending the panel 30.
- FIG. 7 is a plan view showing a schematic configuration of the main part of the tactile sensation providing apparatus according to the second embodiment of the present invention, and corresponds to FIG.
- the tactile sensation providing apparatus 11 according to the present embodiment is different from the tactile sensation providing apparatus 10 according to the first embodiment in the configuration of the conversion unit 60.
- the same components as those in the first embodiment are denoted by the same reference numerals, and different portions will be described.
- the conversion unit 60 includes a linear moving member 63 and a sliding member 64.
- the linearly moving member 63 includes a slope 63a extending in a direction intersecting the displacement direction of the piezoelectric element 51, a side 63b coupled to the piezoelectric element 51, and a side 63c sliding on the inner wall (bottom surface 20c) of the lower housing 20b. And has a wedge shape.
- the sliding member 64 is provided in the housing 20 by extending in the thickness direction of the housing 20, a sliding surface 64 a that slides on the slope 63 a of the linear moving member 63, a side 64 b that is coupled to the panel back surface 30 b of the panel 30.
- the guide member 25 is formed in a triangular shape having a side 64c that slides.
- the linearly moving member 63 is also guided by the bottom surface 20 c of the lower housing 20 b and is displaced in the right direction integrally with the piezoelectric element 51.
- the sliding member 64 slides on the slope 63a of the linear moving member 63 along with the displacement, and moves upward in FIG. Move straight in the direction.
- the expansion / contraction displacement direction by the piezoelectric element 51 is converted to approximately 90 degrees by the conversion unit 60 and transmitted to the panel 30, and the panel 30 is displaced upward against the elastic force of the joint 23.
- FIGS. 8A is an enlarged view of the conversion unit 60
- FIG. 8B is an enlarged view of the linear moving member 63
- FIG. 8C is an enlarged view of the sliding member 64.
- the amount of displacement applied to the force point of the linear moving member 63 due to the displacement of the piezoelectric element 51 is S
- the throwing input is T
- D the amount of displacement received by F
- F be the generated force
- ⁇ be the angle formed by the slope 63a with respect to the displacement direction of the linear moving member 63.
- the displacement amount D is expressed by the following expression (3).
- D S ⁇ tan ⁇ (3)
- the frictional force between the linear movement member 63 and the bottom surface 20c of the lower housing 20b serving as a guide is P1
- the friction coefficient is ⁇ 1
- the frictional force between the linear movement member 63 and the sliding member 64 is P2
- the friction coefficient is ⁇ 3
- the frictional coefficient is ⁇ 3
- the throwing-in force and the generated force considering the friction are T ′ and F ′, respectively.
- the frictional forces P1 and P2 act on the linear moving member 63 as shown in FIG.
- N ′ is a combined force of the throwing force T ′ acting in the normal direction of the slope 63a and the generated force F ′.
- P1 ⁇ 1 ⁇ F ′
- the tactile sensation providing device 10 when used while being placed on a horizontal surface such as a desk, it is necessary to consider the influence of the gravity.
- the piezoelectric element 51 can function as a press detection unit. That is, when the operator performs an input operation on the tactile sensation providing apparatus 10 configured as an electronic device such as a mobile phone, a pressure by the input operation is input to the panel 30.
- the sliding member 64 is moved to the guide member 25. Displaces downward along Then, the linear moving member 63 activates the sliding surface 64a and linearly moves in the left direction, that is, in the direction of the piezoelectric element 51 along the bottom surface 20c of the lower housing 20b.
- the displacement direction by the panel 30 is converted by the conversion unit 60 by approximately 90 degrees and transmitted to the piezoelectric element 51, and the piezoelectric element 51 is displaced so as to contract in the left direction.
- the piezoelectric element 51 transmits data based on the pressure to the control unit of the tactile sensation providing apparatus 10, and the control unit detects the pressure.
- the tactile sensation providing apparatus 10 can be configured more simply because both the linear moving member 63 and the sliding member 64 move linearly. Other functions and effects are the same as those in the first embodiment.
- the conversion angle of the displacement direction by the linear moving member 63 and the sliding member 64 is not limited to 90 °, and can be an arbitrary angle.
- FIG. 9 is a plan view illustrating an arrangement example of actuators in the tactile sensation providing apparatus according to the third embodiment of the present invention, and corresponds to FIG.
- two actuators 50 are arranged in the lower housing 20b as shown in FIG.
- the same components as those in the first embodiment are denoted by the same reference numerals, and different portions will be described.
- the housing 20 includes an upper housing 20a and a restriction portion 27 that is a mechanism for restricting the displacement of the panel 30 disposed in the upper housing 20a. Details of the inside of the housing 20 will be described later.
- the piezoelectric element 51 engages with the conversion unit 60 on the end surface on the other end side that is not fixed to the fixing unit 24.
- the configuration of the conversion unit 60 is the same as that of the first embodiment.
- the converter 60 engages with the panel 30 at two points sandwiching the center of gravity of the panel 30 in a plan view of the housing 20 (tactile sensation providing apparatus 10).
- the conversion unit 60 is engaged with the displacement point in the vicinity of the short sides 20d and 20e of the lower housing 20b, which is out of the display area D of the display unit 40 shown by phantom lines in FIG. Retained.
- FIG. 9 the portion of the conversion unit 60 that engages with the displacement point is displayed as a shaded area on a part of the conversion unit 60.
- FIG. 10 is a schematic diagram illustrating the displacement of the panel 30 included in the tactile sensation providing apparatus, and is a cross-sectional view along the short side direction of the tactile sensation providing apparatus.
- FIG. 10 particularly shows the displacement of the panel 30 when the tactile sensation providing apparatus does not include the restricting portion 27.
- the actuator 50 is driven in this state and the displacement of the actuator 50 is transmitted to the displacement point via the conversion unit 60, the panel 30 is pushed up in the thickness direction at the displacement point as shown in FIG. .
- the panel 30 uses the location where the finger is in contact as a fulcrum.
- the other end side of the panel 30 through the displacement point is displaced upward.
- the location where the user touches the finger on the panel 30 is less likely to be displaced in the thickness direction by limiting the displacement of the panel 30 by the finger. Therefore, even if the actuator 50 is displaced, it is difficult to provide a good tactile sensation.
- FIG. 11 is a schematic diagram showing the displacement of the panel 30 included in the tactile sensation providing apparatus, similarly to FIG. 10, and is a cross-sectional view along the short side direction of the tactile sensation providing apparatus.
- FIG. 11 is different from FIG. 10 and shows the displacement of the panel 30 when the tactile sensation providing apparatus includes the restricting portion 27. That is, the tactile sensation providing apparatus shown in FIG. 11 includes a restricting portion 27 that restricts the upward displacement of the panel 30 at the end of the long side of the panel 30.
- the user touches a finger in the vicinity of the long side of the tactile sensation providing apparatus on the panel 30 in a state where the actuator 50 is not driven as illustrated in FIG. .
- the actuator 50 is driven in this state and the displacement of the actuator 50 is transmitted to the displacement point via the converter 60, the panel 30 is pushed up in the thickness direction at the displacement point.
- the panel 30 uses the location where the finger is in contact as a fulcrum. The other end side of the panel 30 through the displacement point is displaced upward.
- the tactile sensation providing device includes the restriction portion 27, when the other end side comes into contact with the restriction portion 27, the displacement of the panel 30 is restricted on the other end side as shown in FIG. . Then, as shown in FIG. 11C, the panel 30 is displaced in the upward direction at the position where the finger is in contact with the other end contacting the restricting portion 27 as a fulcrum. As described above, when the tactile sensation providing apparatus includes the restricting portion 27, the entire panel 30 is displaced in the thickness direction, and thus it is easy to present a good tactile sensation regardless of the position where the finger is in contact.
- FIG. 12 is a diagram illustrating a configuration of the restriction unit 27 included in the tactile sensation providing apparatus 10 of FIG.
- the restricting portion 27 is configured by a hook portion 26 provided so as to be able to engage with the upper housing 20a on which the panel 30 is disposed and the lower housing 20b.
- the distance d between the hook portion 26 a of the upper housing 20 a and the hook portion 26 b of the lower housing 20 b is configured to be larger than the displacement amount of the panel 30 driven by the actuator 50.
- the upper housing 20a and the lower housing 20b are joined by the joint 23, and the joint 23 keeps the distance d between the hooks 26a and 26b constant when the actuator 50 is not driven. To do.
- the panel 30 is displaced upward by driving the actuator 50 in the same manner as the principle shown in FIG. 11 against the elastic force of the joint 23. Further, the hook portion 26 regulates the displacement of the panel 30 and makes it difficult for the upper housing 20a and the lower housing 20b to be detached from each other.
- the restricting portions 27 are arranged at, for example, the four corners of the housing 20 in a top view.
- the position of the restricting portion 27 is not limited to that shown in FIG. 9 and can be arranged at any position where the entire panel 30 can be displaced.
- the panel 30 disposed in the upper housing 20 a is pressurized against the rotating member 61 so as to be urged toward the inside of the housing 20 at the contact portion 61 c by the elastic force of the joint portion 23.
- the rotating member 61 is brought into contact with the piezoelectric element 51 by applying pressure to the contact portion 61b.
- the restricting unit 27 restricts the displacement of the panel 30 so that the entire panel 30 is displaced. Therefore, the tactile sensation providing apparatus 10 can easily provide a good tactile sensation regardless of the position where the user's finger is in contact with the panel 30.
- the tactile sensation providing apparatus 10 in order to displace the entire panel 30 in the tactile sensation providing apparatus that does not include the restricting portion 27, it is necessary to arrange the four actuators 50 at the four corners of the housing 20 so as to displace the four corners of the panel 30, for example.
- the tactile sensation providing apparatus 10 according to the present embodiment restricts the displacement of the panel 30 by the restricting portion 27, the entire panel 30 can be displaced by the two actuators 50, for example.
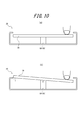
- the conversion unit 60 may be configured as shown in FIG. 13 or FIG.
- the slope 63a of the linear moving member 63 is formed into a curved surface
- the sliding surface 64a of the sliding member 64 is formed into a curved surface according to the shape of the slope 63a. In this way, if the slope 63a of the linear moving member 63 is formed into a curved surface, the angle of the tangent line at the point of contact with the sliding member 64 changes with the displacement of the linear moving member 63, so the displacement amount D and the generated force F Can be made non-linear with respect to the input displacement.
- the displacement of the sliding member 64 is small at the beginning of the throwing-in input T, but the frictional force P2 It is possible to reduce the load caused by the static friction and to increase the displacement of the sliding member 64 after the dynamic friction. Thereby, the panel 30 can be displaced more smoothly.
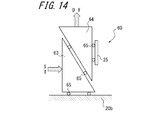
- the 14 includes a linear moving member 63 and a bottom surface 20c of the lower housing 20b serving as a guide, between the linear moving member 63 and the sliding member 64, and between the sliding member 64 and the guide member 25.
- a plurality of bearings 65 are provided.
- the bearing 65 may be spherical or cylindrical.
- the tactile sensation providing apparatus 10 may not include the conversion unit 60.
- the actuator 50 is disposed so as to be displaced in the thickness direction of the housing 20.
- the number of actuators 50 is described as two, but the number of actuators 50 is not limited to two.
- the tactile sensation providing apparatus 10 may include three or more actuators. Further, the tactile sensation providing apparatus 10 may include only one actuator 50 at the position of the center of gravity of the panel 30 in the plan view of the housing 20.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- User Interface Of Digital Computer (AREA)
Abstract
触感呈示装置10は、パネル30と、アクチュエータ50と、パネル30及びアクチュエータ50に係合し、アクチュエータ50の変位によりアクチュエータ50の変位方向及び変位量を異なる変位方向及び異なる変位量に変換して、パネル30を変位させる変換部と、を備え、パネル30の変位方向は、パネル30の厚み方向であり、アクチュエータ50の変位方向とパネル30の変位方向とは交差する。
Description
本出願は、日本国特許出願2014-229420号(2014年11月12日出願)及び日本国特許出願2014-229421号(2014年11月12日出願)の優先権を主張するものであり、当該出願の開示全体を、ここに参照のために取り込む。
本発明は、触感呈示装置に関するものである。
例えば特許文献1には、タッチパネル等のパネル上で、指等の接触物に対してリアルな触感を呈示する技術が開示されている。特許文献1に開示の触感呈示装置は、パネルを厚み方向に振動させることにより、操作者に「押した」という押下感を呈示している。
従来知られている触感呈示装置は、パネルを振動させる振動部の構造によっては、パネルが振動する変位量が小さかったりパネルの振動がユーザに伝達されにくかったりして、良好な触感を呈示しにくい場合があることから、装置構成上、改善の余地がある。
かかる事情に鑑みてなされた本発明の目的は、改善された触感呈示装置を提供することにある。
上記課題を解決するため、本発明の一実施形態に係る触感呈示装置は、
パネルと、
アクチュエータと、
前記パネル及び前記アクチュエータに係合し、前記アクチュエータの変位により当該アクチュエータの変位方向及び変位量を異なる変位方向及び異なる変位量に変換して、前記パネルを変位させる変換部と、
を備え、
前記パネルの変位方向は、前記パネルの厚み方向であり、
前記アクチュエータの変位方向と前記パネルの変位方向とは交差することを特徴とする。
パネルと、
アクチュエータと、
前記パネル及び前記アクチュエータに係合し、前記アクチュエータの変位により当該アクチュエータの変位方向及び変位量を異なる変位方向及び異なる変位量に変換して、前記パネルを変位させる変換部と、
を備え、
前記パネルの変位方向は、前記パネルの厚み方向であり、
前記アクチュエータの変位方向と前記パネルの変位方向とは交差することを特徴とする。
前記変換部は、前記アクチュエータの変位により回動して前記パネルを変位させる回動部材を備えていてもよい。
前記変換部は、前記アクチュエータの変位方向と交差して延在する斜面を有し、前記アクチュエータの変位により当該アクチュエータの変位方向に直線移動する直線移動部材と、該直線移動部材の変位により前記斜面を滑動して前記パネルを変位させる滑動部材と、を備えていてもよい。
弾性を有する接合部により接合された上部筐体及び下部筐体を有する筐体を備え、
前記パネルは、前記上部筐体に支持されて、前記接合部の弾性力により前記変換部に与圧を加えた状態で係合され、
前記アクチュエータ及び前記変換部は、前記下部筐体に支持されて、前記変換部が前記アクチュエータに与圧を加えた状態で係合されていてもよい。
前記パネルは、前記上部筐体に支持されて、前記接合部の弾性力により前記変換部に与圧を加えた状態で係合され、
前記アクチュエータ及び前記変換部は、前記下部筐体に支持されて、前記変換部が前記アクチュエータに与圧を加えた状態で係合されていてもよい。
また、本発明の他の一実施形態に係る触感呈示装置は、
パネルと、
前記パネルを該パネルの厚み方向に変位させるアクチュエータと、
前記パネルの変位を規制する規制部とを備える。
パネルと、
前記パネルを該パネルの厚み方向に変位させるアクチュエータと、
前記パネルの変位を規制する規制部とを備える。
前記アクチュエータは、前記パネルの裏面において、当該触感呈示装置の平面視で前記パネルの重心を挟んだ少なくとも2点を変位させることにより、前記パネルを変位させてもよい。
前記パネル及び前記アクチュエータに係合し、前記アクチュエータの変位により当該アクチュエータの変位方向及び変位量を異なる変位方向及び異なる変位量に変換して、前記パネルを変位させる変換部を備えていてもよい。
前記アクチュエータは、積層型圧電素子を備えていてもよい。
本発明によれば、改善された触感呈示装置を提供できる。
以下、本発明の実施の形態について、図を参照して説明する。
(第1実施の形態)
図1は、本発明の第1実施の形態に係る触感呈示装置の概略構成を示す外観斜視図である。触感呈示装置10は、例えば、スマートフォン等の携帯電話機、携帯型ミュージックプレイヤ、ノートパソコン、腕時計、タブレット端末、ゲーム機などの他の機能を有する電子機器として実現される。
図1は、本発明の第1実施の形態に係る触感呈示装置の概略構成を示す外観斜視図である。触感呈示装置10は、例えば、スマートフォン等の携帯電話機、携帯型ミュージックプレイヤ、ノートパソコン、腕時計、タブレット端末、ゲーム機などの他の機能を有する電子機器として実現される。
本実施の形態に係る触感呈示装置10は、外観形状が概略長方形状を成す筐体20を備える。筐体20は、上部筐体20aと下部筐体20bとにより構成される。上部筐体20aと下部筐体20bとは、弾性部材で構成される接合部23により接合され、1つの筐体20を構成している。接合部23は、防水性のテープ又はスポンジ等として構成されていてもよい。上部筐体20aと下部筐体20bとは、接合部23を介して、互いに変位可能に接合される。上部筐体20aと下部筐体20bとは、変位方向を筐体20の厚み方向に制限するガイドに沿って変位するものであってもよい。
筐体20は、金属や硬質プラスチック等で形成される。上部筐体20aには、筐体20の表面21側にパネル30が配置されている。また、筐体20の内部には、図1にパネル30の一部を切り欠いて示すように、パネル30の下側に表示部40が保持されている。筐体20は、内部に、アクチュエータと変換部とを備える。
パネル30は、接触を検出するタッチパネル又は表示部40を保護するカバーパネル等からなる。パネル30は、例えばガラス又はアクリル等の合成樹脂により、例えば長方形状に形成される。パネル30は、タッチパネルである場合、操作者の指、ペン又はスタイラスペン等の接触物による接触を検出する。タッチパネルの検出方式は、静電容量方式、抵抗膜方式、表面弾性波方式(又は超音波方式)、赤外線方式、電磁誘導方式又は荷重検出方式等の任意の方式を用いることができる。本実施の形態では、説明の便宜上、パネル30は、タッチパネルとする。この場合、パネル30は表示部40と一体的に構成される場合もある。パネル30は、パネル表面30aの周辺部を除く領域が、筐体20の表面21に形成された開口21aから露出する。
表示部40は、例えば、液晶ディスプレイ、有機ELディスプレイ、無機ELディスプレイ、電子ペーパ等を用いて構成される。表示部40は、ブラウザや電子ブック等のアプリケーションソフトウェア(以下、単に「アプリケーション」と記す)における画像(ページ)、アイコンや押しボタン等の入力用オブジェクト等を表示する。
図2は、上部筐体20aを取り除いて示す、下部筐体20bにおけるアクチュエータの配置例を示す平面図である。下部筐体20bには、図2に示すように、4つのアクチュエータ50が配置されている。アクチュエータ50は、パネル30を変位させるための駆動源を構成するもので、例えば圧電素子51を用いて構成される。圧電素子51は、電気信号(電圧)を印加することで、構成材料の電気機械結合係数に従い伸縮又は屈曲変位する素子である。これらの素子は、例えばセラミックや水晶からなるものが用いられる。圧電素子51は、ユニモルフ、バイモルフ又は積層型圧電素子であってよい。積層型圧電素子には、バイモルフを積層した積層型バイモルフ素子や、例えばPZT(チタン酸ジルコン酸鉛)からなる複数の誘電体層と、該複数の誘電体層間に配置された電極層との積層構造体から構成されるスタックタイプのものがある。ユニモルフは電気信号が印加されると伸縮変位し、バイモルフは電気信号が印加されると屈曲変位し、スタックタイプの積層型圧電素子は電気信号が印加されると積層方向に沿って伸縮変位する。本実施の形態では、圧電素子51がスタックタイプの積層型圧電素子からなる。
圧電素子51は、一端部が、下部筐体20bが備える固定部24に固定されて、下部筐体20bの長手方向とほぼ平行に延在して配置される。固定部24は、各圧電素子51の延在方向に対して、下部筐体20bの中央側に配置される。したがって、圧電素子51は、下部筐体20bの長手方向にほぼ平行に伸縮変位する。圧電素子51の伸縮変位をガイドするため、下部筐体20bには、各圧電素子51を挟むように、それぞれ一対のガイド部材22が配置されている。
圧電素子51は、固定部24に固定されていない他端側の端面において、変換部60に係合する。変換部60の具体的な構成については、図3の説明において詳細に述べる。変換部60は、下部筐体20bにおいて、図2に仮想線で示した表示部40の表示領域Dから外れた、下部筐体20bの四隅の近傍でパネル30と係合するように保持される。変換部60におけるパネル30との係合部分は、図2では、変換部60の一部に網掛け領域として表示されている。
図3は、触感呈示装置10の要部の概略構成を示す断面図である。圧電素子51は、下部筐体20bの底部において、ガイド部材22により支持される。変換部60は、パネル30の筐体20の内部側のパネル裏面30b及び圧電素子51の他端部の端面に係合して配置される。変換部60は、圧電素子51の伸縮変位により、その変位方向及び変位量を異なる変位方向及び異なる変位量に変換して、パネル30を変位させる。本実施の形態において、変換部60は回動部材61を有する。回動部材61は、固定軸62に回動可能に係止される係止部61aと、圧電素子51が当接する当接部61bと、パネル30のパネル裏面30bが当接する当接部61cとを有し、係止部61aがフック状に形成され、当接部61b及び61cが突状に形成されている。
パネル30は、上部筐体20aに支持されて、接合部23の弾性力により、当接部61cにおいて筐体20の内部方向(図3では下方向)に、変換部60に与圧を加えた状態で係合される。アクチュエータ50及び変換部60は、下部筐体20bに支持されて、変換部60が当接部61bにおいてアクチュエータ50に与圧を加えた状態で係合される。
図3において、圧電素子51が右方向に伸びるように変位すると、回動部材61は固定軸62を支点として左回りに回動する。これにより、圧電素子51による変位方向が、変換部60によりほぼ90度変換されてパネル30に伝達され、パネル30が、接合部23の弾性力に抗して上部筐体20aと一体に上方向に変位する。つまり、パネル30の変位方向は、当該パネル30の厚み方向となる。また、圧電素子51の伸縮変位方向とパネル30の変位方向とは、触感呈示装置10の側面視において交差している。
ここで、変換部60の作用について、図4を参照して説明する。図4は、変換部60の拡大図である。図4において、支点は回動部材61の係止部61aが係合する固定軸62を示し、力点は圧電素子51が当接する回動部材61の当接部61bを示し、作用点はパネル30のパネル裏面30bが当接する当接部61cを示す。圧電素子51の変位によって力点に投入される投入変位量をS、投入力をTとし、作用点に作用する変位量をD、発生力をFとし、支点となる固定軸62から力点までの距離をL1、支点から作用点までの距離をL2とするとき、変位量D及び発生力Fは、下式(1)及び(2)のように近似できる。ただし、L1、L2は、それぞれS、Dよりも十分大きいものとする。
D=S×L2/L1 ・・・(1)
F=T×L1/L2 ・・・(2)
D=S×L2/L1 ・・・(1)
F=T×L1/L2 ・・・(2)
上式(1)及び(2)から、力点や作用点の位置すなわち距離L1やL2を適切に設定することにより、触感を呈示できる十分な変位量D及び発生力Fを得ることが可能となる。一般に、積層型の圧電素子51は、投入力Tは大きいが、投入変位量Sは小さい。そのため、一般の圧電素子51では、操作者が良好に検出できる触感を呈示しにくい場合がある。しかし、本実施の形態においては、変換部60により、触感を呈示できるパネル30の変位量Dは投入変位量Sに比べて大きくなる。そのため、触感呈示装置10は、良好な触感を呈示しやすくなる。
なお、圧電素子51の伸縮変位方向とパネル30の変位方向とのなす角度、すなわち圧電素子51の伸縮変位方向の変換角度は、90度に限らず任意に設定することができる。
一方、図4に示すように、回動部材61には、力の発生体である圧電素子51による抗力A(=T)と、移動対象物であるパネル30による抗力B(=F)と、抗力A及び抗力Bをバランスさせるための抗力C(=(T2+F2)1/2)とが発生する。つまり、抗力A及び抗力Bが常に発生するように、固定軸62の位置を定めれば、3つの抗力A、B、Cのバランスにより回動部材61の位置が定まる。したがって、回動部材61を固定軸62に緊密に保持させる必要がないので、回動部材61を図4の形状に代えて、例えば図5(a)~(c)に示すような形状とするなど、回動部材61の形状の自由度を向上できるとともに、変換部60の組み立て性を向上できる。
図5(a)に示す回動部材61は、係止部61aがフック状に形成され、扇形状の両側面に当接部61b及び61cが形成されるものである。図5(b)に示す回動部材61は、全体が扇形の多角形状からなり、扇形状の頂角部に固定軸62よりも大径の開口からなる係止部61aが形成され、扇形状の両側面に当接部61b及び61cが形成されるものである。図5(c)に示す回動部材61は、全体がL字形状からなり、L字形状の内角部が係止部61aを構成し、外側面に当接部61b及び61cが形成されるものである。
また、回動部材61に抗力A及び抗力Bが常に作用することにより、回動部材61と固定軸62との係合部に摩擦が発生しても、L1:L2すなわちD:S及びT:Fをほぼ一定に維持することができる。したがって、磨耗に影響されることなく、パネル30を初期の条件で長期間に亘って安定して変位させることが可能となる。
本実施の形態に係る触感呈示装置10は、パネル30への操作者の指、ペン又はスタイラスペン等の接触物による接触又は押下を検出して、圧電素子51を伸縮変位させる。これにより、パネル30を変位させて、操作者に触感をフィードバックする。
ここで、本実施の形態における圧電素子51は、操作者によるパネル30への押圧を検出する押圧検出部としても機能する。圧電素子51の押圧検出部としての機能について、再び図3を参照して説明する。なお、触感呈示装置10は、圧電素子51とは別に、押圧検出用の圧電素子又は歪センサ等の押圧検出部を備えていてもよい。
操作者が、携帯電話機等の電子機器として構成された触感呈示装置10に対して入力操作を行うと、パネル30に対して入力操作による押圧が入力される。パネル30が配置された上部筐体20aが、弾性部材により構成される接合部23の弾性力に抗して下部筐体20bの方向へ変位すると、当接部61cは下方向に変位する。その結果、回動部材61は固定軸62を支点として右回りに回動する。これにより、パネル30による変位方向が、変換部60によりほぼ90度変換されて圧電素子51に伝達され、圧電素子51が、左方向に縮むように変位する。
圧電素子51は、当接部61bからの押圧に係る荷重(力)の大きさ(または、荷重(力)の大きさが変化する速さ(加速度))に応じた、電気的な特性である電圧の大きさ(電圧値(以下、押圧に基づくデータと称する))の出力を行う。圧電素子51から出力された押圧に基づくデータは、触感呈示装置10の制御部に送信され、当該データに対応する押圧(入力)がされたことが検出される。このように、圧電素子51は、触感呈示とともに押圧検出にも用いることができる。
図6は、図1の触感呈示装置10の要部の回路構成を示す機能ブロック図である。触感呈示装置10は、制御部70と、記憶部71と、圧電素子駆動部72と、上述したパネル30、表示部40及び圧電素子51とを有する。
制御部70は、触感呈示装置10の各機能ブロックを含む装置全体を制御及び管理するプロセッサである。制御部70は、制御手順を規定したプログラムを実行するCPU(Central Processing Unit)等のプロセッサで構成される。かかるプログラムは、例えば記憶部71又は外部の記憶媒体等に格納される。
記憶部71は、半導体メモリ等で構成され、各種情報や触感呈示装置10を動作させるためのプログラム等を記憶するとともに、ワークメモリとしても機能する。
圧電素子駆動部72は、制御部70からの制御信号に基づいて圧電素子51に印加する電気信号を生成して圧電素子51に印加する。
表示部40は、制御部70による制御のもとに、アプリケーションにおける画像(ページ)、アイコンや押しボタン等の入力用オブジェクト等を表示する。パネル30は、表示部40に表示されたオブジェクトに対する接触物による接触を検出する。パネル30の出力は、制御部70に供給されてパネル30に対する接触物の接触の位置が検出される。
制御部70は、パネル30の出力に基づいて表示部40に表示された入力用オブジェクトに対する接触物による接触を検出し、圧電素子51の出力(押圧に基づくデータ)に基づいてパネル30への押下荷重が所定値に達したことを検出すると、圧電素子駆動部72により圧電素子51を所定の駆動パターンで駆動する。圧電素子51の駆動により、パネル30が変位して、操作者に入力用オブジェクトを操作した触感が呈示される。
圧電素子51の駆動パターンは、例えば接触物の接触が検出された入力用オブジェクトに応じて記憶部71に記憶しておくことができる。例えば、押しボタンを押した触感を呈示する場合は、所定周波数の半サイクルのパルス状の駆動電圧を圧電素子51に印加して、パネル30を一往復変位させる駆動パターンとすることができる。その他、入力用オブジェクトに応じて、所定周波数の複数サイクルの駆動電圧を圧電素子51に印加して、パネル30を複数往復変位させる駆動パターンとすることもできる。
本実施の形態に係る触感呈示装置10によると、圧電素子51によるパネル30に平行な伸縮変位をパネル30の厚み方向の変位に変換することができる。このとき、圧電素子51の変位量を、変換部60により、より大きな変位量に変換してパネル30を変位させることができる。そのため、圧電素子51を装置の厚み方向に配置する場合と比較して、より大きな変位量でパネル30を変位させることができ、厚み方向に良好な触感を呈示しやすくなる。また、圧電素子51を押圧検出部として機能させることにより、パネル30への押圧検出用の圧電素子51を別途配置する場合と比較して、簡単に装置を構成することができる。また、回動部材61を固定軸62に緊密に保持させる必要がないので、回動部材61の形状の自由度を向上でき、変換部60の組み立て性を向上できるとともに、回動部材61と固定軸62との係合部の磨耗に影響されることなく、パネル30を初期の条件で長期間に亘って安定して変位させることが可能となる。
また、圧電素子51は、筐体20の長手方向に、つまり触感呈示装置10の側面視において、圧電素子51の変位方向がパネル30の変位方向と交差して配置されているので、筐体20の厚み方向の装置の寸法を小さくでき、小型化が可能となる。また、触感呈示装置10は、4つの圧電素子51を備えており、各圧電素子51に係合された変換部60が筐体20の四隅の近傍でパネル30に接触しているため、パネル30全体を変位させて触感を呈示する。そのため、触感呈示装置10は、パネル30をたわませて触感を提示する場合と比較して、より小さな力で良好に触感を呈示できる。
(第2実施の形態)
図7は、本発明の第2実施の形態に係る触感呈示装置の要部の概略構成を示す平面図であり、図3に対応する図である。本実施の形態に係る触感呈示装置11は、第1実施の形態に係る触感呈示装置10と変換部60の構成が異なるものである。以下、第1実施の形態と同一構成要素には同一参照符号を付し、異なる部分について説明する。
図7は、本発明の第2実施の形態に係る触感呈示装置の要部の概略構成を示す平面図であり、図3に対応する図である。本実施の形態に係る触感呈示装置11は、第1実施の形態に係る触感呈示装置10と変換部60の構成が異なるものである。以下、第1実施の形態と同一構成要素には同一参照符号を付し、異なる部分について説明する。
図7において、変換部60は、直線移動部材63と滑動部材64とを備える。直線移動部材63は、圧電素子51の変位方向と交差する方向に延在する斜面63aと、圧電素子51に結合される辺63bと、下部筐体20bの内壁(底面20c)を滑動する辺63cとを有するくさび形状からなる。滑動部材64は、直線移動部材63の斜面63aを滑動する滑動面64aと、パネル30のパネル裏面30bに結合される辺64bと、筐体20の厚み方向に延在して筐体20に設けられたガイド部材25を滑動する辺64cとを有する三角形状からなる。
図7において、圧電素子51が右方向に伸びるように変位すると、直線移動部材63も下部筐体20bの底面20cにガイドされて圧電素子51と一体に右方向に変位する。直線移動部材63が右方向に変位すると、その変位に伴って、滑動部材64は、直線移動部材63の斜面63aを滑動して、ガイド部材25に沿って図7の上方向、すなわちパネル30の方向に直線移動する。これにより、圧電素子51による伸縮変位方向が、変換部60によりほぼ90度変換されてパネル30に伝達されて、パネル30が接合部23の弾性力に抗して上方向に変位する。
ここで、変換部60の作用について、図8(a)~(c)を参照して説明する。図8(a)は変換部60の拡大図であり、図8(b)は直線移動部材63の拡大図であり、図8(c)は滑動部材64の拡大図である。図8(a)において、圧電素子51の変位によって直線移動部材63の力点に投入される投入変位量をS、投入力をTとし、直線移動部材63の作用点から滑動部材64(パネル30)が受ける変位量をD、発生力をFとし、直線移動部材63の変位方向に対する斜面63aのなす角度をθとする。この場合、変位量Dは、下式(3)で表される。
D=S×tanθ ・・・(3)
D=S×tanθ ・・・(3)
一方、直線移動部材63とガイドとなる下部筐体20bの底面20cとの間の摩擦力をP1、摩擦係数をμ1、直線移動部材63と滑動部材64との間の摩擦力をP2、摩擦係数をμ2、滑動部材64とガイド部材25との間の摩擦力をP3、摩擦係数をμ3とし、摩擦を考慮した投入力及び発生力をそれぞれT´及びF´とする。この場合、直線移動部材63には、図8(b)に示すように摩擦力P1及びP2が作用する。これら摩擦力P1及びP2は、下式によって表される。なお、N´は、斜面63aの法線方向に作用する投入力T´と発生力F´との合成力である。
P1=μ1×F´
P2=μ2×N´=μ2×T´/sinθ
P1=μ1×F´
P2=μ2×N´=μ2×T´/sinθ
したがって、この場合の投入力Tは、下式(4)のようになる。
T=T´+P1+P2×cosθ
=T´+μ1×F´+μ2×T´/sinθ×cosθ
=T´+μ1×T´×cotθ+μ2×T´cotθ
=T´×(1+μ1cotθ+μ2cotθ) ・・・(4)
T=T´+P1+P2×cosθ
=T´+μ1×F´+μ2×T´/sinθ×cosθ
=T´+μ1×T´×cotθ+μ2×T´cotθ
=T´×(1+μ1cotθ+μ2cotθ) ・・・(4)
また、滑動部材64には、図8(c)に示すように摩擦力P2及びP3が作用する。これら摩擦力P2及びP3は、下式によって表される。
P2=μ2×N´=μ2×T´/sinθ
P3=μ3×T´
P2=μ2×N´=μ2×T´/sinθ
P3=μ3×T´
したがって、この場合の発生力Fは、下式(5)のようになる。
F=F´-P3-P2×sinθ
=T´/tanθ-μ3×T´-μ2×T´
=T´×(cotθ-μ2-μ3) ・・・(5)
F=F´-P3-P2×sinθ
=T´/tanθ-μ3×T´-μ2×T´
=T´×(cotθ-μ2-μ3) ・・・(5)
上式(4)及び(5)から、圧電素子51による投入力Tによって、パネル30に作用する発生力Fは、下式(6)で表される。
F=T×(cotθ-μ2-μ3)/(1+μ1cotθ+μ2cotθ) ・・・(6)
F=T×(cotθ-μ2-μ3)/(1+μ1cotθ+μ2cotθ) ・・・(6)
なお、摩擦がない場合、F=T×cotθとなる。また、摩擦係数が全て同一(μ)とすると、F=T×(cotθ-2μ)/(1+2μcotθ)となる。
また、触感呈示装置10を机等の水平面に載置して使用する場合、上記重力の影響を考慮する必要がある。
また、第2実施の形態においても、第1実施の形態と同様に、圧電素子51を押圧検出部として機能させることができる。すなわち、操作者が、携帯電話機等の電子機器として構成された触感呈示装置10に対して入力操作を行うと、パネル30に対して入力操作による押圧が入力される。図7において、パネル30が配置された上部筐体20aが、弾性部材により構成される接合部23の弾性力に抗して下部筐体20bの方向へ変位すると、滑動部材64は、ガイド部材25に沿って下方向に変位する。すると、直線移動部材63が、滑動面64aを活動して、下部筐体20bの底面20cに沿って左方向、すなわち圧電素子51の方向に直線移動する。これにより、パネル30による変位方向が、変換部60によりほぼ90度変換されて圧電素子51に伝達され、圧電素子51が、左方向に縮むように変位する。圧電素子51は、押圧に基づくデータを触感呈示装置10の制御部に送信し、制御部において、押圧が検出される。
本実施の形態によると、上式(3)及び(6)から、直線移動部材63の変位方向に対する斜面63aのなす角度θを適切に設定することにより、触感を呈示できる十分な変位量D及び発生力Fを得ることが可能となる。したがって、第1実施の形態の場合と同様に、厚み方向に良好な触感を呈示しやすくなる。また、本実施の形態に係る触感呈示装置10は、直線移動部材63及び滑動部材64がともに直線的に移動するので、より簡易に構成できる。その他の作用効果については、第1実施の形態と同様である。なお、直線移動部材63及び滑動部材64による変位方向の変換角度は、90°の限らず、任意の角度とすることが可能である。
(第3実施の形態)
図9は、本発明の第3実施の形態に係る触感呈示装置におけるアクチュエータの配置例を示す平面図であり、図2に対応する図である。本実施の形態に係る触感呈示装置11において、下部筐体20bには、図9に示すように、2つのアクチュエータ50が配置されている。以下、第1実施の形態と同一構成要素には同一参照符号を付し、異なる部分について説明する。
図9は、本発明の第3実施の形態に係る触感呈示装置におけるアクチュエータの配置例を示す平面図であり、図2に対応する図である。本実施の形態に係る触感呈示装置11において、下部筐体20bには、図9に示すように、2つのアクチュエータ50が配置されている。以下、第1実施の形態と同一構成要素には同一参照符号を付し、異なる部分について説明する。
本実施形態において、筐体20は、内部に、上部筐体20a及び上部筐体20aに配置されたパネル30の変位を規制する機構である規制部27を備える。筐体20の内部の詳細については後述する。
圧電素子51は、固定部24に固定されていない他端側の端面において、変換部60に係合する。変換部60の構成は、第1実施の形態と同様である。変換部60は、筐体20(触感呈示装置10)の平面視でパネル30の重心を挟んだ2点において、パネル30に係合する。変換部60は、下部筐体20bにおいて、図9に仮想線で示す表示部40の表示領域Dから外れた、下部筐体20bの短辺20d及び20eの近傍で変位点に係合するように保持される。変換部60における変位点との係合部分は、図9では、変換部60の一部に網掛け領域として表示されている。圧電素子51が伸縮変位すると、変換部60を介して、伸縮変位が変位点に伝達され、その結果パネル30が変位する。
ここで、図10及び図11を参照して、触感呈示装置10が備える規制部27の機能について説明する。図10は、触感呈示装置が備えるパネル30の変位を示す模式図であり、触感呈示装置の短辺方向に沿った断面図である。図10は特に、触感呈示装置が規制部27を備えない場合におけるパネル30の変位を示す。
例えば、図10(a)に示すようにアクチュエータ50が駆動されていない状態で、ユーザが、パネル30における触感呈示装置の長辺の近傍に指を接触させたとする。この状態でアクチュエータ50が駆動され、アクチュエータ50の変位が変換部60を介して変位点に伝達されると、図10(b)に示すように、パネル30は、変位点において厚み方向に押し上げられる。このとき、パネル30において指が接触している箇所は、指により厚み方向(上方向)への変位ができないよう制限されているため、パネル30は、指が接触している箇所を支点として、変位点を介したパネル30の他端側が上方向に変位する。このように、パネル30においてユーザが指を接触させた箇所は、指がパネル30の変位を制限することにより、厚み方向に変位しにくい。そのため、アクチュエータ50が変位しても、良好な触感を呈示しにくい。
図11は、図10と同様に、触感呈示装置が備えるパネル30の変位を示す模式図であり、触感呈示装置の短辺方向に沿った断面図である。図11は、図10と異なり、触感呈示装置が規制部27を備える場合におけるパネル30の変位を示す。すなわち、図11に示す触感呈示装置は、パネル30の上方向への変位を、パネル30の長辺の端部において規制する規制部27を備える。
規制部27を備える触感呈示装置において、図11(a)に示すようにアクチュエータ50が駆動されていない状態で、ユーザが、パネル30における触感呈示装置の長辺の近傍に指を接触させたとする。この状態でアクチュエータ50が駆動され、アクチュエータ50の変位が変換部60を介して変位点に伝達されると、パネル30は、変位点において厚み方向に押し上げられる。このとき、パネル30において指が接触している箇所は、指により厚み方向(上方向)への変位ができないよう制限されているため、パネル30は、指が接触している箇所を支点として、変位点を介したパネル30の他端側が上方向に変位する。ここで、触感呈示装置は、規制部27を備えているため、当該他端側が規制部27に接触すると、パネル30は、図11(b)に示すように他端側において変位が規制される。すると、パネル30は、図11(c)に示すように、規制部27に接触する他端側を支点として、指が接触している箇所が上方向に変位する。このように、触感呈示装置が規制部27を備える場合、パネル30の全体が厚み方向に変位するため、指が接触している位置にかかわらず良好な触感を呈示しやすい。
図12は、図9の触感呈示装置10が備える規制部27の構成を示す図である。規制部27は、パネル30が配置された上部筐体20aと、下部筐体20bとに互いに係合可能に設けられたフック部26により構成される。上部筐体20aのフック部26aと、下部筐体20bのフック部26bとの間の距離dは、アクチュエータ50の駆動によるパネル30の変位量よりも大きくなるように構成される。上部筐体20aと下部筐体20bとの間は、接合部23により接合され、接合部23は、アクチュエータ50が駆動していない場合におけるフック部26aと26bとの間の距離dを一定に維持する。パネル30は、アクチュエータ50の駆動により、図11に示した原理と同様にして、接合部23の弾性力に反して上方向に変位する。また、フック部26は、パネル30の変位を規制するとともに、上部筐体20aと下部筐体20bとを互いに外れにくくする。
規制部27は、図9に示したように、例えば筐体20の上面視における四隅に配置される。規制部27の位置は、図9に示したものに限られず、パネル30の全体を変位させることができる任意の位置に配置できる。
本実施形態において、上部筐体20aに配置されたパネル30は、接合部23の弾性力により、当接部61cにおいて、筐体20の内部方向に附勢するように回動部材61に与圧を加える。これにより、回動部材61は、当接部61bにおいて圧電素子51に与圧を加えて当接される。
本実施の形態に係る触感呈示装置10によると、規制部27が、パネル30の全体が変位するようにパネル30の変位を規制する。そのため、触感呈示装置10は、ユーザの指がパネル30に接触している位置にかかわらず、良好な触感を呈示しやすくなる。
また、規制部27を備えない触感呈示装置においてパネル30全体を変位させるためには、例えばパネル30の四隅を変位させるように、筐体20の四隅に4つのアクチュエータ50を配置する必要がある。しかし、本実施の形態に係る触感呈示装置10は、規制部27によってパネル30の変位を規制しているため、例えば、2つのアクチュエータ50により、パネル30の全体を変位させることができる。このように、本実施の形態に係る触感呈示装置10によれば、より少ないアクチュエータ50によっても、良好な触感を呈示しやすくなる。
なお、本発明は、上記実施の形態にのみ限定されるものではなく、幾多の変形又は変更が可能である。例えば、第2実施の形態において、変換部60は図13又は図14に示すように構成されてもよい。
図13に示す変換部60は、直線移動部材63の斜面63aが曲面に形成され、斜面63aの形状に応じて滑動部材64の滑動面64aが曲面に形成されたものである。このように、直線移動部材63の斜面63aを曲面に形成すれば、直線移動部材63の変位に伴って滑動部材64と接する作用点における接線の角度が変化するので、変位量D及び発生力Fの変化を投入変位に対して非線形にできる。
したがって、例えば、図13において直線移動部材63の上部の角度θ´を図8に示した角度θよりも小さくすることで、投入力Tの投入当初は滑動部材64の変位は小さいが摩擦力P2の静止摩擦による負荷を低減させ、動摩擦以降後は滑動部材64の変位を大きくすることができる。これにより、パネル30をよりスムーズに変位させることが可能となる。
図14に示す変換部60は、直線移動部材63とガイドとなる下部筐体20bの底面20cとの間、直線移動部材63と滑動部材64との間、及び、滑動部材64とガイド部材25との間に、それぞれ複数のベアリング65を備える。ベアリング65は、球状であってもよいし、円柱状であってもよい。このように、第2実施の形態において摩擦力P1、P2及びP3が発生する部分にそれぞれベアリング65を装填すれば、摩擦力をほぼゼロにすることができるので、より小さい投入力Tで、パネル30をよりスムーズに変位させることが可能となる。
また、例えば、第3実施の形態において、触感呈示装置10は、変換部60を備えていなくてもよい。この場合、アクチュエータ50は、筐体20の厚み方向に変位するように配置される。
また、第3実施の形態において、アクチュエータ50の数量が2つであるとして説明したが、アクチュエータ50の数量は、2つに限られない。例えば、触感呈示装置10は、3つ以上のアクチュエータを備えていてもよい。また、触感呈示装置10は、筐体20の平面視におけるパネル30の重心位置にアクチュエータ50を1つのみ備えていてもよい。
10 触感呈示装置
20 筐体
20a 上部筐体
20b 下部筐体
20c 底面
20d、20e 短辺
21 表面
21a 開口
22、25 ガイド部材
23 接合部
24 固定部
26 フック部
27 規制部
30 パネル
30a パネル表面
30b パネル裏面
40 表示部
50 アクチュエータ
51 圧電素子
60 変換部
61 回動部材
61a 係止部
61b、61c 当接部
62 固定軸
63 直線移動部材
64 滑動部材
65 ベアリング
70 制御部
71 記憶部
72 圧電素子駆動部
20 筐体
20a 上部筐体
20b 下部筐体
20c 底面
20d、20e 短辺
21 表面
21a 開口
22、25 ガイド部材
23 接合部
24 固定部
26 フック部
27 規制部
30 パネル
30a パネル表面
30b パネル裏面
40 表示部
50 アクチュエータ
51 圧電素子
60 変換部
61 回動部材
61a 係止部
61b、61c 当接部
62 固定軸
63 直線移動部材
64 滑動部材
65 ベアリング
70 制御部
71 記憶部
72 圧電素子駆動部
Claims (9)
- パネルと、
アクチュエータと、
前記パネル及び前記アクチュエータに係合し、前記アクチュエータの変位により当該アクチュエータの変位方向及び変位量を異なる変位方向及び異なる変位量に変換して、前記パネルを変位させる変換部と、
を備え、
前記パネルの変位方向は、前記パネルの厚み方向であり、
前記アクチュエータの変位方向と前記パネルの変位方向とは交差する
ことを特徴とする触感呈示装置。 - 前記変換部は、前記アクチュエータの変位により回動して前記パネルを変位させる回動部材を備える、請求項1に記載の触感呈示装置。
- 前記変換部は、前記アクチュエータの変位方向と交差して延在する斜面を有し、前記アクチュエータの変位により当該アクチュエータの変位方向に直線移動する直線移動部材と、該直線移動部材の変位により前記斜面を滑動して前記パネルを変位させる滑動部材と、を備える、請求項1に記載の触感呈示装置。
- 弾性を有する接合部により接合された上部筐体及び下部筐体を有する筐体を備え、
前記パネルは、前記上部筐体に支持されて、前記接合部の弾性力により前記変換部に与圧を加えた状態で係合され、
前記アクチュエータ及び前記変換部は、前記下部筐体に支持されて、前記変換部が前記アクチュエータに与圧を加えた状態で係合されることを特徴とする、請求項1に記載の触感呈示装置。 - 前記アクチュエータは、積層型圧電素子を備える、請求項1に記載の触感呈示装置。
- パネルと、
前記パネルを該パネルの厚み方向に変位させるアクチュエータと、
前記パネルの変位を規制する規制部と
を備える触感呈示装置。 - 前記アクチュエータは、前記パネルの裏面において、当該触感呈示装置の平面視で前記パネルの重心を挟んだ少なくとも2点を変位させることにより、前記パネルを変位させる、請求項6に記載の触感呈示装置。
- 前記パネル及び前記アクチュエータに係合し、前記アクチュエータの変位により当該アクチュエータの変位方向及び変位量を異なる変位方向及び異なる変位量に変換して、前記パネルを変位させる変換部を備える、請求項6に記載の触感呈示装置。
- 前記アクチュエータは、積層型圧電素子を備える、請求項6に記載の触感呈示装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP15859504.1A EP3220232B1 (en) | 2014-11-12 | 2015-11-11 | Tactile-sense-presenting device |
| US15/526,032 US10353469B2 (en) | 2014-11-12 | 2015-11-11 | Tactile sensation providing device |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014229421A JP6490400B2 (ja) | 2014-11-12 | 2014-11-12 | 触感呈示装置 |
| JP2014229420A JP6282575B2 (ja) | 2014-11-12 | 2014-11-12 | 触感呈示装置 |
| JP2014-229421 | 2014-11-12 | ||
| JP2014-229420 | 2014-11-12 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016075935A1 true WO2016075935A1 (ja) | 2016-05-19 |
Family
ID=55954038
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/005625 WO2016075935A1 (ja) | 2014-11-12 | 2015-11-11 | 触感呈示装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10353469B2 (ja) |
| EP (1) | EP3220232B1 (ja) |
| WO (1) | WO2016075935A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3547078A4 (en) * | 2016-11-28 | 2020-07-22 | Kyocera Corporation | TACTILE SENSATIONS PRESENTATION DEVICE |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6294170B2 (ja) * | 2014-06-26 | 2018-03-14 | 京セラ株式会社 | 触感呈示装置 |
| GB201803084D0 (en) | 2018-02-26 | 2018-04-11 | Cambridge Mechatronics Ltd | Haptic button with SMA |
| JP6926029B2 (ja) * | 2018-05-23 | 2021-08-25 | 京セラ株式会社 | 構造体及び触感呈示装置 |
| JP2021094509A (ja) | 2019-12-16 | 2021-06-24 | ホシデン株式会社 | 電磁アクチュエータ及びこれを備えた振動付与機構 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07155297A (ja) * | 1993-12-03 | 1995-06-20 | Nikon Corp | 生体診断用プローブ |
| JP2004047852A (ja) * | 2002-07-15 | 2004-02-12 | Sumitomo Heavy Ind Ltd | Zチルトステージ |
| JP2014056337A (ja) * | 2012-09-11 | 2014-03-27 | Tokai Rika Co Ltd | 触覚提示装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US231550A (en) * | 1880-08-24 | Carpet-cleaner | ||
| US84384A (en) * | 1868-11-24 | Improvement in bottle-filling apparatus | ||
| WO2000017739A1 (fr) * | 1998-09-22 | 2000-03-30 | Yasufumi Mase | Processeur de donnees pour personne atteinte de troubles visuels et peripherique tactile entree/sortie |
| US7342573B2 (en) * | 2004-07-07 | 2008-03-11 | Nokia Corporation | Electrostrictive polymer as a combined haptic-seal actuator |
| JP2006146611A (ja) | 2004-11-19 | 2006-06-08 | Fujitsu Component Ltd | ハプティックパネル装置 |
| US20080084384A1 (en) * | 2006-10-05 | 2008-04-10 | Immersion Corporation | Multiple Mode Haptic Feedback System |
| JP4633167B2 (ja) | 2008-12-22 | 2011-02-16 | 京セラ株式会社 | 入力装置および入力装置の制御方法 |
| US9696803B2 (en) * | 2009-03-12 | 2017-07-04 | Immersion Corporation | Systems and methods for friction displays and additional haptic effects |
| US8633916B2 (en) | 2009-12-10 | 2014-01-21 | Apple, Inc. | Touch pad with force sensors and actuator feedback |
| KR101894951B1 (ko) * | 2011-09-20 | 2018-10-15 | 삼성전자주식회사 | 촉각 전달 장치 및 촉각 전달 장치의 동작 방법 |
| KR101452055B1 (ko) * | 2012-12-03 | 2014-10-21 | 삼성전기주식회사 | 진동발생장치 |
| JP2015184886A (ja) | 2014-03-24 | 2015-10-22 | 東京パーツ工業株式会社 | 触覚型ソレノイドシステム |
-
2015
- 2015-11-11 EP EP15859504.1A patent/EP3220232B1/en active Active
- 2015-11-11 US US15/526,032 patent/US10353469B2/en active Active
- 2015-11-11 WO PCT/JP2015/005625 patent/WO2016075935A1/ja active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07155297A (ja) * | 1993-12-03 | 1995-06-20 | Nikon Corp | 生体診断用プローブ |
| JP2004047852A (ja) * | 2002-07-15 | 2004-02-12 | Sumitomo Heavy Ind Ltd | Zチルトステージ |
| JP2014056337A (ja) * | 2012-09-11 | 2014-03-27 | Tokai Rika Co Ltd | 触覚提示装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3547078A4 (en) * | 2016-11-28 | 2020-07-22 | Kyocera Corporation | TACTILE SENSATIONS PRESENTATION DEVICE |
| US10969868B2 (en) | 2016-11-28 | 2021-04-06 | Kyocera Corporation | Tactile sensation providing apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3220232B1 (en) | 2020-01-01 |
| EP3220232A4 (en) | 2018-06-20 |
| EP3220232A1 (en) | 2017-09-20 |
| US20170315617A1 (en) | 2017-11-02 |
| US10353469B2 (en) | 2019-07-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2016075935A1 (ja) | 触感呈示装置 | |
| JP6014107B2 (ja) | 複合物圧電アクチュエータを用いた触覚フィードバック | |
| WO2005015375A1 (ja) | 力覚フィードバック装置 | |
| JP6073451B1 (ja) | 電子機器 | |
| US9152264B2 (en) | Electronic device with piezoelectric actuator | |
| US20110261021A1 (en) | Transparent composite piezoelectric combined touch sensor and haptic actuator | |
| JP2013003754A (ja) | 入力装置 | |
| WO2017090448A1 (ja) | 触感呈示装置 | |
| TW202006981A (zh) | 配置 | |
| JP6294170B2 (ja) | 触感呈示装置 | |
| JP6490400B2 (ja) | 触感呈示装置 | |
| JP6282575B2 (ja) | 触感呈示装置 | |
| JP6084950B2 (ja) | 電子機器の外付けケース | |
| JP6613153B2 (ja) | 触感呈示装置 | |
| JP2013012005A (ja) | スイッチ装置 | |
| JP6382409B2 (ja) | 触感呈示装置 | |
| JP6199847B2 (ja) | 触感呈示装置 | |
| WO2017130768A1 (ja) | 触感呈示装置 | |
| US20240220017A1 (en) | Electronic apparatus and method of operation electronic apparatus | |
| JP6572144B2 (ja) | 触感呈示装置 | |
| JP2017083971A (ja) | 操作装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15859504 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15526032 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| REEP | Request for entry into the european phase |
Ref document number: 2015859504 Country of ref document: EP |