WO2016009757A1 - 電池状態検知装置、二次電池システム、プログラム製品、電池状態検知方法 - Google Patents
電池状態検知装置、二次電池システム、プログラム製品、電池状態検知方法 Download PDFInfo
- Publication number
- WO2016009757A1 WO2016009757A1 PCT/JP2015/067007 JP2015067007W WO2016009757A1 WO 2016009757 A1 WO2016009757 A1 WO 2016009757A1 JP 2015067007 W JP2015067007 W JP 2015067007W WO 2016009757 A1 WO2016009757 A1 WO 2016009757A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- allowable
- current
- battery
- unit
- imax
- Prior art date
Links
Images























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
- B60L58/13—Maintaining the SoC within a determined range
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/36—Arrangements for testing, measuring or monitoring the electrical condition of accumulators or electric batteries, e.g. capacity or state of charge [SoC]
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/36—Arrangements for testing, measuring or monitoring the electrical condition of accumulators or electric batteries, e.g. capacity or state of charge [SoC]
- G01R31/3644—Constructional arrangements
- G01R31/3648—Constructional arrangements comprising digital calculation means, e.g. for performing an algorithm
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/36—Arrangements for testing, measuring or monitoring the electrical condition of accumulators or electric batteries, e.g. capacity or state of charge [SoC]
- G01R31/367—Software therefor, e.g. for battery testing using modelling or look-up tables
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/36—Arrangements for testing, measuring or monitoring the electrical condition of accumulators or electric batteries, e.g. capacity or state of charge [SoC]
- G01R31/389—Measuring internal impedance, internal conductance or related variables
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/36—Arrangements for testing, measuring or monitoring the electrical condition of accumulators or electric batteries, e.g. capacity or state of charge [SoC]
- G01R31/392—Determining battery ageing or deterioration, e.g. state of health
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01M—PROCESSES OR MEANS, e.g. BATTERIES, FOR THE DIRECT CONVERSION OF CHEMICAL ENERGY INTO ELECTRICAL ENERGY
- H01M10/00—Secondary cells; Manufacture thereof
- H01M10/42—Methods or arrangements for servicing or maintenance of secondary cells or secondary half-cells
- H01M10/48—Accumulators combined with arrangements for measuring, testing or indicating the condition of cells, e.g. the level or density of the electrolyte
- H01M10/482—Accumulators combined with arrangements for measuring, testing or indicating the condition of cells, e.g. the level or density of the electrolyte for several batteries or cells simultaneously or sequentially
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/54—Drive Train control parameters related to batteries
- B60L2240/547—Voltage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/54—Drive Train control parameters related to batteries
- B60L2240/549—Current
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/40—Control modes
- B60L2260/50—Control modes by future state prediction
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/40—Control modes
- B60L2260/50—Control modes by future state prediction
- B60L2260/54—Energy consumption estimation
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02E60/10—Energy storage using batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
Definitions
- the present invention relates to a battery state detection device, a secondary battery system, a program product, and a battery state detection method.
- a secondary battery system such as a power supply device using a secondary battery as a power storage means, a distributed power storage device, or an electric vehicle is equipped with a battery control circuit that manages the state of the battery.
- Typical examples of indices used by the battery control circuit to manage the state of the battery include a state of charge (SOC: State Of Charge), a deterioration state (SOH: State Of Health), allowable current, allowable power, and the like. is there.
- SOC indicates how much the battery is charged (how much charge remains in the battery), and the SOH indicates how much the battery has deteriorated from the initial state. It is.
- the allowable current is the maximum value of the current that can be charged and discharged by the battery, and the allowable power is a value obtained by multiplying the allowable current by the battery voltage.
- the allowable current of the battery includes an allowable charging current indicating an allowable current during charging and an allowable discharging current indicating an allowable current during discharging.
- an allowable charging current indicating an allowable current during charging
- an allowable discharging current indicating an allowable current during discharging.
- a battery chargeable / dischargeable power estimation method described in Patent Document 1 has been proposed. This detects the current value of the charge / discharge current flowing through the battery, calculates the open circuit voltage of the battery based on the current accumulated capacity calculated from the current value of the charge / discharge current, and obtains the obtained current value and the open voltage. Based on this, the chargeable / dischargeable power in a predetermined time from the charging / discharging change point of the battery is estimated.
- a battery state detection device is a device that detects a state of a battery, and a first allowable current for obtaining a first allowable current of the battery based on a voltage of the battery detected by a voltage detection unit.
- the calculation unit, the second allowable current calculation unit for obtaining the second allowable current of the battery without using the voltage of the battery, the first allowable current and the second allowable current are compared, and the comparison result And a correction unit that performs a predetermined correction process based on the above.
- a secondary battery system is based on at least one of the first allowable current and the second allowable current, wherein a voltage is detected by the battery state detection device and the voltage detection unit.
- a secondary battery that is charged and discharged based on the determined allowable current is a program product executed by a computer in a battery state detection device connected to a battery, wherein the computer is a first product of the battery based on a voltage detection result of the battery.
- a first allowable current calculation unit for determining an allowable current; a second allowable current calculation unit for determining a second allowable current of the battery without using a voltage detection result of the battery; the first allowable current and the second Are allowed to function as a correction unit that performs a predetermined correction process based on the comparison result.
- a battery state detection method is a method for detecting a state of a battery, detecting a voltage of the battery, and obtaining a first allowable current of the battery based on a voltage detection result of the battery, The second allowable current of the battery is obtained without using the voltage detection result of the battery, the first allowable current and the second allowable current are compared, and a predetermined correction process is performed based on the comparison result. .
- the present invention it is possible to detect the allowable current of the battery with high accuracy in consideration of the influence of the increase in internal resistance according to the deterioration state of the battery.
- a lithium ion battery is used to connect unit cells in series to form an assembled battery, but a unit battery is connected in series to form an assembled battery.
- the assembled battery may be configured by connecting in series the single cells connected in series.
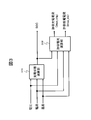
- FIG. 1 is a diagram showing a configuration of a battery system 100 according to the first embodiment of the present invention and its surroundings.
- Battery system 100 is connected to inverter 400 via relays 300a and 300b, and is connected to charger 420 via relays 300c and 300d.
- the battery system 100 includes an assembled battery 110, a single battery management unit 120, a current detection unit 130, a voltage detection unit 140, an assembled battery control unit 150, and a storage unit 180.
- the assembled battery 110 is composed of a plurality of unit cells 111.
- the unit cell management unit 120 monitors the state of the unit cell 111.
- the current detection unit 130 detects a current flowing through the battery system 100.
- the voltage detection unit 140 detects the total voltage of the assembled battery 110.
- the assembled battery control unit 150 detects the state of the assembled battery 110 and also manages the state.
- the assembled battery control unit 150 functions as a battery state detection device that detects the state of the assembled battery 110 in the battery system 100.
- the assembled battery control unit 150 includes a battery voltage and temperature of each unit cell 111 transmitted by the unit cell management unit 120, a current value flowing through the battery system 100 transmitted by the current detection unit 130, and an assembled battery transmitted by the voltage detection unit 140 A total voltage value of 110 is received.
- the assembled battery control unit 150 detects the state of the assembled battery 110 based on the received information. The result of the state detection by the assembled battery control unit 150 is transmitted to the single cell management unit 120 and the vehicle control unit 200.
- the assembled battery 110 is configured by electrically connecting a plurality of unit cells 111 capable of storing and releasing electrical energy (charging and discharging DC power) in series.
- the unit cells 111 constituting the assembled battery 110 are grouped into a predetermined number of units when performing state management / control.
- the grouped unit cells 111 are electrically connected in series to form unit cell groups 112a and 112b.
- the number of the single cells 111 constituting the single cell group 112 may be the same in all the single cell groups 112, or the number of the single cells 111 may be different for each single cell group 112.
- the single cell management unit 120 monitors the state of the single cells 111 constituting the assembled battery 110.
- the unit cell management unit 120 includes a unit cell control unit 121 provided for each unit cell group 112.
- cell control units 121 a and 121 b are provided corresponding to the cell groups 112 a and 112 b.
- the unit cell control unit 121 monitors and controls the state of the unit cells 111 constituting the unit cell group 112.
- unit cells 111 are electrically connected in series to form unit cell groups 112a and 112b, and the unit cell groups 112a and 112b are further electrically connected in series.
- an assembled battery 110 including a total of eight unit cells 111 was obtained.
- the assembled battery control unit 150 and the single cell management unit 120 transmit and receive signals via an insulating element 170 typified by a photocoupler and a signal communication unit 160.
- a communication means between the assembled battery control unit 150 and the unit cell control units 121a and 121b constituting the unit cell management unit 120 will be described.
- the cell control units 121a and 121b are connected in series according to the descending order of potentials of the cell groups 112a and 112b monitored by each.
- a signal transmitted from the assembled battery control unit 150 to the unit cell management unit 120 is input to the unit cell control unit 121 a via the insulating element 170 and the signal communication unit 160.
- the output of the unit cell control unit 121a is input to the unit cell control unit 121b via the signal communication unit 160, and the output of the lowest unit cell control unit 121b is supplied to the assembled battery control unit via the insulating element 170 and the signal communication unit 160.
- the insulating element 170 is not interposed between the unit cell control unit 121a and the unit cell control unit 121b, but signals can be transmitted and received through the insulating element 170.
- the storage unit 180 includes the assembled battery 110, the single battery 111, and the single battery group 112, the internal resistance characteristics, the capacity at full charge, the polarization voltage, the deterioration characteristics, the individual difference information, the SOC and the open circuit voltage (OCV: Open Circuit Voltage). Stores information such as correspondence relationships. Furthermore, characteristic information such as the single cell management unit 120, the single cell control unit 121, and the assembled battery control unit 150 can be stored in advance. Even when the operations of the battery system 100, the assembled battery control unit 150, and the like are stopped, various information stored in the storage unit 180 is retained.
- the assembled battery control unit 150 uses the information received from the single cell management unit 120, the current detection unit 130, the voltage detection unit 140, and the vehicle control unit 200, the SOC table 501 and the resistance characteristic table 901, which will be described later, and the like.
- the calculation for detecting the SOC, SOH, allowable charging / discharging current, electric power, etc. of the unit cell 111 is executed. And based on a calculation result, information is output to the cell management part 120 and the vehicle control part 200.
- the vehicle control unit 200 controls the inverter 400 connected to the battery system 100 via the relays 300a and 300b using the information transmitted by the assembled battery control unit 150. Moreover, the battery charger 420 connected to the battery system 100 via the relays 300c and 300d is controlled. During traveling of the vehicle, the battery system 100 is connected to the inverter 400 and drives the motor generator 410 using the energy stored in the assembled battery 110. At the time of charging, the battery system 100 is connected to a charger 420 and is charged by supplying power from a household power source or a charging stand.
- the charger 420 is used when charging the assembled battery 110 using an external power source represented by a home or a charging stand.
- the charger 420 is configured to control a charging voltage, a charging current, and the like based on a command from the vehicle control unit 200, but the control may be performed based on a command from the assembled battery control unit 150.
- the charger 420 may be installed inside the vehicle according to the configuration of the vehicle, the performance of the charger 420, the purpose of use, the installation conditions of the external power source, and the like, or may be installed outside the vehicle.
- the battery system 100 When the vehicle system on which the battery system 100 is mounted starts and runs, the battery system 100 is connected to the inverter 400 under the control of the vehicle control unit 200, and the motor uses the energy stored in the assembled battery 110.
- the generator 410 is driven.
- the assembled battery 110 is charged with the power generated by the motor generator 410.
- the battery system 100 and the charger 420 are connected based on information transmitted from the vehicle control unit 200, The battery 110 is charged until a predetermined condition is met.
- the energy stored in the assembled battery 110 by charging is used when the vehicle is driven next time, or is used to operate electrical components inside and outside the vehicle. Further, if necessary, it may be discharged to an external power source represented by a household power source.
- FIG. 2 is a diagram showing a circuit configuration of the unit cell control unit 121.
- the cell control unit 121 includes a voltage detection circuit 122, a control circuit 123, a signal input / output circuit 124, and a temperature detection unit 125.
- the voltage detection circuit 122 measures the voltage between the terminals of each unit cell 111.
- the control circuit 123 receives measurement results from the voltage detection circuit 122 and the temperature detection unit 125, and transmits the measurement results to the assembled battery control unit 150 via the signal input / output circuit 124.
- it is determined that the circuit configuration that is generally implemented in the unit cell control unit 121 and that equalizes the voltage and SOC variation between the unit cells 111 generated due to self-discharge and variation in consumption current is known. The description is omitted.
- the temperature detection unit 125 included in the unit cell control unit 121 in FIG. 2 has a function of measuring the temperature of the unit cell group 112.
- the temperature detection unit 125 measures one temperature as the entire cell group 112 and treats the temperature as a temperature representative value of the cell 111 constituting the cell group 112.
- the temperature measured by the temperature detection unit 125 is used for various calculations for detecting the state of the cell 111, the cell group 112, or the assembled battery 110. Since FIG. 2 is based on this assumption, the single battery control unit 121 is provided with one temperature detection unit 125.
- a temperature detection unit 125 may be provided for each single cell 111 to measure the temperature for each single cell 111, and various calculations may be performed based on the temperature for each single cell 111. In this case, the number of temperature detection units 125 Therefore, the configuration of the unit cell control unit 121 becomes complicated.
- the temperature detection unit 125 is simply shown. Actually, a temperature sensor is installed on the temperature measurement target, and the installed temperature sensor outputs temperature information as a voltage. The measurement result is transmitted to the signal input / output circuit 124 via the control circuit 123, and the signal input / output circuit 124 outputs the measurement result to the outside of the unit cell control unit 121. A function for realizing this series of flows is implemented as a temperature detection unit 125 in the single cell control unit 121, and the voltage detection circuit 122 can be used for measuring temperature information (voltage).
- the assembled battery control unit 150 is realized by a microcomputer or the like, and can execute various processes and calculations as described below by executing various programs.
- FIG. 3 is a block diagram showing the processing contents performed by the assembled battery control unit 150 in the first embodiment of the present invention.
- the assembled battery control unit 150 functionally includes a charge state calculation unit 301 and an allowable current calculation unit 302.
- the charge state calculation unit 301 obtains the SOC using the voltage, current, and temperature.
- the allowable current calculation unit 302 calculates the allowable charge current (Imax_chg) and the allowable discharge current (Imax_dis) using the voltage, current, temperature, and the SOC determined by the charge state calculation unit 301.
- Imax_chg represents the allowable current of the assembled battery 110 during charging, that is, the maximum current that can be flowed when the assembled battery 110 is charged.
- Imax_dis represents an allowable current of the assembled battery 110 at the time of discharging, that is, a maximum current that can flow when the assembled battery 110 is discharged.
- the charging state calculation unit 301 includes a voltage obtained by dividing the inter-terminal voltage of the assembled battery 110 measured by the voltage detection unit 140 by the series number of the single cells 111, the current I measured by the current detection unit 130, and the temperature. Based on the temperature T measured by the detection unit 125, the SOC of the battery pack 110 is estimated. Below, the estimation process of the SOC based on a voltage is demonstrated as an example of the content of the process for SOC estimation which the charge condition calculating part 301 performs.
- FIG. 4 is a circuit diagram showing an equivalent circuit of the unit cell 111.
- the unit cell 111 includes a voltage source 401, a DC resistance 402, a polarization resistance 403, and a capacitance component 404.
- the polarization resistor 403 and the capacitance component 404 are connected in parallel, and the parallel connection pair, the voltage source 401, and the DC resistor 402 are connected in series.
- the OCV is used for the calculation of the SOC (charged state), but it is impossible to directly measure the OCV when the single cell 111 is charged / discharged. Therefore, the OCV is calculated by subtracting the IR drop and the polarization voltage Vp from the CCV according to the following formula (2) obtained by modifying the formula (1).
- OCV CCV-I x Ro-Vp (2)
- the resistance value Ro and the polarization voltage Vp of the DC resistor 402 can be determined by the characteristic information extracted from the unit cell 111.
- the characteristic information of the unit cell 111 is stored in advance in the storage unit 180 as a value obtained experimentally by charging and discharging the unit cell 111. If the characteristic information used when determining the resistance value Ro and the polarization voltage Vp of the DC resistor 402 is changed in accordance with the SOC, temperature, current, etc. of the unit cell 111, a highly accurate OCV can be obtained. . Further, the inter-terminal voltage CCV is obtained by dividing the measurement result of the voltage detection unit 140 by the serial number of the single cells 111, and the current I is obtained from the measurement result of the current detection unit 130.
- FIG. 5 is a diagram illustrating an example of the SOC table 501 stored in the storage unit 180.
- the SOC table 501 is a data table describing a correspondence relationship between the OCV of the single battery 111 and the SOC of the single battery 111.
- the data format is arbitrary, but here it is shown in a graph format for convenience of explanation.
- the correspondence relationship between the OCV and the SOC can also be expressed by using a mathematical formula or the like. Other methods may be used as long as the method can convert from OCV to SOC or from SOC to OCV.
- the OCV is calculated by the equation (2), the SOC of the unit cell 111 can be estimated by using this SOC table 501.
- the charge state calculation unit 301 can also perform the SOC estimation of the unit cell 111 by the following equation (3).
- SOC0 represents the initial SOC value before charging / discharging of the unit cell 111
- the current I represents the measured value of the current detector 130.
- Qmax represents the capacity of the single battery 111 when fully charged, and this is stored in advance in the storage unit 180 as a value obtained experimentally by charging or discharging the single battery 111 or the assembled battery 110.
- SOCi SOC0 + 100 ⁇ ⁇ Idt / Qmax (3)
- the state-of-charge calculation unit 301 may perform SOC detection using either the formula (2) or the formula (3).
- the allowable current calculation unit 302 is a voltage obtained by dividing the inter-terminal voltage of the assembled battery 110 measured by the voltage detection unit 140 by the series number of the cells 111, the current measured by the current detection unit 130, and the temperature detection. Based on the temperature measured by the unit 125 and the SOC obtained by the state-of-charge computing unit 301, it has a function of obtaining the allowable current of the assembled battery 110 (unit cell 111).
- the allowable current is the maximum current that can be charged / discharged by the assembled battery 110 (unit cell 111), and is classified into an allowable charging current during charging and an allowable discharging current during discharging.
- FIG. 6 is a diagram showing the relationship between the allowable charging current and the allowable discharging current.
- the allowable discharge current is large and the allowable charge current is small.
- the SOC of the unit cell 111 is low, the allowable discharge current is small and the allowable charging current is large.
- the allowable current calculated by the allowable current calculation unit 302 is transmitted together with the SOC calculated by the charge state calculation unit 301 to a controller (vehicle control unit 200 in this embodiment) installed outside.
- the external controller that has received this charges / discharges the assembled battery 110 within the allowable current range.
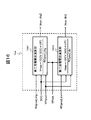
- FIG. 7 shows a block diagram of the allowable current calculation unit 302 in the first embodiment of the present invention.
- the allowable current calculation unit 302 includes an internal resistance detection unit 701, a battery state prediction unit 702, a first allowable current calculation unit 703, a second allowable current calculation unit 704, an allowable charge current determination unit 705, and an allowable discharge current.
- a determination unit 706 In the battery system 100 of FIG. 1, by executing a predetermined program in the assembled battery control unit 150 configured using a microcomputer or the like, the assembled battery control unit 150 can function as each unit illustrated in FIG. it can.
- the internal resistance detection unit 701 uses the SOC estimated by the charge state calculation unit 301 in FIG. 3, the voltage measured by the voltage detection unit 140, and the current measured by the current detection unit 130, and uses the assembled battery 110.
- the current internal resistance value of is calculated. Specifically, using the following formulas (4) and (5), the difference between the CCV during charge / discharge obtained as described above from the measured value of the voltage detection unit 140 and the OCV obtained from the SOC is calculated. By dividing by the current I measured by the current detector 130, the current internal resistance value of the assembled battery 110 can be calculated.
- OCV_SOC represents the value of OCV obtained from the SOC estimation result by the SOC table 501 shown in FIG.
- VDdet CCV-OCV_SOC (4)
- Rdet VDdet / I (5)
- FIG. 8 is an explanatory diagram of an internal resistance value calculation method by the internal resistance detection unit 701.
- diagrams 801 and 802 respectively show how CCV and OCV vary with time when the assembled battery 110 is discharged.
- the OCV gradually decreases with time, while the CCV rapidly decreases at the start of discharge and thereafter gradually decreases.
- the CCV increases rapidly, and then coincides with the OCV after a predetermined time has elapsed.
- the internal resistance detection unit 701 calculates the difference VDdet between the OCV and CCV during discharge shown in FIG. 8 from the equation (4), and divides this VDdet by the current I according to the equation (5), thereby obtaining the internal resistance value Rdet. Calculate.
- the calculation of the internal resistance value by the internal resistance detection unit 701 is executed only when the current measurement value by the current detection unit 130 is equal to or greater than a predetermined threshold value.
- the internal resistance detection unit 701 substitutes the value of Rdet obtained by Equations (4) and (5) into Rdet_chg representing the internal resistance value during charging.
- a charge flag Rflag_chg for indicating whether or not the internal resistance value during charging of the battery 110 has been detected is set to “1”.
- Rdet_dis representing the internal resistance value at the time of discharging to indicate whether or not the internal resistance value at the time of discharging the assembled battery 110 has been detected.
- the discharge flag Rflag_dis is set to “0”.
- the internal resistance detection unit 701 substitutes the value of Rdet obtained in Equations (4) and (5) for Rdet_dis and sets Rflag_dis to '1'. To do.
- a predetermined invalid value or a predetermined internal resistance value is substituted for Rdet_chg, and Rflag_chg is set to ‘0’.
- the internal resistance detection unit 701 When a current less than the threshold is detected, the internal resistance detection unit 701 cannot calculate both the internal resistance value Rdet_chg during charging and the internal resistance value Rdet_dis during discharging. In this case, the internal resistance detection unit 701 substitutes a predetermined invalid value or a predetermined internal resistance value into Rdet_chg and Rdet_dis, respectively, and sets both Rflag_chg and Rflag_dis to ‘0’.
- the voltage used by the internal resistance detection unit 701 is a voltage obtained by dividing the inter-terminal voltage of the assembled battery 110 measured by the voltage detection unit 140 by the number of cells 111 in series. Therefore, the internal resistance value obtained by the above calculation is an average internal resistance value of each unit cell 111 constituting the assembled battery 110. Thereafter, the allowable current is obtained using this internal resistance value, but the voltage to be handled needs to be a value corresponding to the unit cell 111.
- the battery state prediction unit 702 has a function of predicting the state of the assembled battery 110 without using the voltage (CCV) measured by the voltage detection unit 140.
- the battery state prediction unit 702 outputs Rpred_chg that represents the predicted internal resistance value during charging of the current assembled battery 110 and Rpred_dis that represents the predicted internal resistance value during discharge as battery characteristic information that represents the prediction result of the battery state. To do.
- Rpred_chg and Rpred_dis can be estimated from the SOC estimated by the charge state calculation unit 301 in FIG. 3 and the temperature received from the temperature detection unit 125 in FIG. This is because a resistance characteristic is extracted by performing a charge / discharge test on the assembled battery 110 or the single battery 111 in advance, and the result is stored in the storage unit 180 as a resistance characteristic table according to the SOC, temperature, and the like. realizable.
- FIG. 9 is a diagram illustrating an example of the resistance characteristic tables 901, 902, and 903 stored in the storage unit 180. These are data tables describing the correspondence between the internal resistance of the assembled battery 110 and the SOC of the assembled battery 110.
- the resistance characteristic table 901 shows the characteristics at high temperature
- the resistance characteristic table 902 shows the characteristics at normal temperature
- a resistance characteristic table 903 represents characteristics at low temperatures.
- the data format is arbitrary, but here it is shown in a graph format for convenience of explanation. In the present embodiment, three types of data tables corresponding to the temperature are used. However, the correspondence relationship between the internal resistance, the SOC, and the temperature can also be expressed by using mathematical expressions.
- the battery state prediction unit 702 estimates Rpred_chg and Rpred_dis from the SOC estimated by the charge state calculation unit 301 in FIG. 3 and the temperature received from the temperature detection unit 125 in FIG. 2 using the resistance characteristic table. Note that this internal resistance prediction method is an example, and the internal resistance can also be predicted by the following method. That is, the estimated voltage drop value (VDpred) on the charging side when the battery is charged and the discharging side when the battery is discharged is obtained by the equation (6).
- I is the current charge / discharge current
- ROpred is the resistance characteristic table value of the DC resistor 402 having a value according to the SOC, temperature, etc.
- VPpred is the polarization generated by connecting the polarization resistor 403 and the capacitance component 404 in parallel. It is the result of predicting the voltage by calculation. The prediction of the polarization voltage is based on the characteristics of the polarization resistance 403 and the capacitance component 404 (or the time constant obtained by multiplying the polarization resistance 403 and the capacitance component 404 by conducting a charge / discharge test on the assembled battery 110 or the single cell 111 in advance.
- the internal resistance detection unit 701 detects the internal resistance value of the assembled battery 110 based on the voltage of the assembled battery 110 detected by the voltage detection unit 140. In order to detect the internal resistance value, it is necessary to use the voltage detection result of the assembled battery 110. For this reason, the internal resistance detection unit 701 has a restriction that both the internal resistance value Rdet_chg during charging and the internal resistance value Rdet_dis during discharging cannot be calculated simultaneously. That is, as described above, Rdet_chg can be calculated only during charging when the charging current flowing through the assembled battery 110 exceeds the threshold value. Rdet_dis can be calculated only when the discharge current from the assembled battery 110 exceeds a threshold value.
- the battery state prediction unit 702 estimates the internal resistance value of the assembled battery 110 using the characteristic information of the assembled battery 110 stored in advance without using the voltage of the assembled battery 110 detected by the voltage detection unit 140. I do. Therefore, it is possible to always predict Rpred_chg representing the internal resistance value during charging and Rpred_dis representing the internal resistance value during discharging, regardless of the charge / discharge state of the assembled battery 110. However, when the characteristics of the assembled battery 110 extracted in advance do not match the characteristics of the current assembled battery 110, the output from the battery state prediction unit 702 includes an error corresponding to the difference.
- the first allowable current calculation unit 703 obtains an allowable current based on the voltage of the assembled battery 110 detected by the voltage detection unit 140. Specifically, the internal resistance value Rdet_chg on the charge side and the internal resistance value Rdet_dis on the discharge side detected by the internal resistance detection unit 701 based on the voltage measurement result by the voltage detection unit 140, and the charge state calculation unit 301 in FIG.
- the allowable charging is performed using OCV_SOC, which is the OCV value obtained from the SOC estimated by the above, and the upper limit voltage Vmax and the lower limit voltage Vmin determined from the characteristics of the assembled battery 110.
- Imax_chg1 (Vmax ⁇ OCV_SOC) / Rdet_chg (7)
- Imax_dis1 (Vmin ⁇ OCV_SOC) / Rdet_dis (8)
- FIG. 10 is a block diagram of calculation processing performed by the first allowable current calculation unit 703.
- the first allowable current calculation unit 703 includes a first charging current calculation unit 1001 corresponding to the calculation of Equation (7) and a first discharge current calculation unit 1002 corresponding to the calculation of Equation (8).
- the first charging current calculation unit 1001 uses the internal resistance value Rdet_chg on the charging side input from the internal resistance detection unit 701 and the SOC input from the charge state calculation unit 301, and allows the allowable charging according to Expression (7).
- the current Imax_chg1 is calculated and output.
- the first discharge current calculation unit 1002 uses the discharge-side internal resistance value Rdet_dis input from the internal resistance detection unit 701 and the SOC input from the charge state calculation unit 301 to calculate the allowable discharge according to equation (8).
- the current Imax_dis1 is calculated and output.
- the internal resistance detection unit 701 can calculate Rdet_chg only during charging and can calculate Rdet_dis only during discharging. Therefore, there is a restriction that the first allowable current calculation unit 703 can also calculate Imax_chg1 only during charging and can calculate Imax_dis1 only during discharging.
- the first allowable current calculation unit 703 calculates the allowable charging current Imax_chg1 and the allowable discharge current Imax_dis1 using the voltage detection result by the voltage detection unit 140.
- the second allowable current calculation unit 704 obtains the allowable current of the assembled battery 110 without using the voltage of the assembled battery 110 detected by the voltage detection unit 140.
- OCV_SOC OCV value obtained from the SOC estimated by the computing unit 301
- Vmax and the lower limit voltage Vmin determined from the characteristics of the assembled battery 110
- FIG. 11 is a block diagram of calculation processing performed by the second allowable current calculation unit 704.
- the second allowable current calculation unit 704 includes a second charging current calculation unit 1101 corresponding to the calculation of Expression (9) and a second discharge current calculation unit 1102 corresponding to the calculation of Expression (10).
- the second charging current calculation unit 1101 uses the internal resistance value Rpred_chg on the charging side input from the battery state prediction unit 702 and the SOC input from the charging state calculation unit 301, and allows the allowable charging according to Expression (9).
- the current Imax_chg2 is calculated and output.
- the second discharge current calculation unit 1102 uses the discharge-side internal resistance value Rpred_dis input from the battery state prediction unit 702 and the SOC input from the charge state calculation unit 301, and allows the allowable discharge according to the equation (10).
- the current Imax_dis2 is calculated and output.
- the battery state prediction unit 702 can always calculate Rpred_chg and Rpred_dis regardless of the charge / discharge state of the assembled battery 110. Therefore, the second allowable current calculation unit 704 can always calculate the allowable charge current Imax_chg2 and the allowable discharge current Imax_dis2 regardless of the charge / discharge state of the assembled battery 110.
- the output from the battery state prediction unit 702 includes an error corresponding to the difference. There is a possibility. For this reason, the Imax_chg2 and Imax_dis2 output from the second allowable current calculation unit 704 may include an allowable current error corresponding to the above error.
- the first allowable current calculation unit 703 is limited in the calculation condition that the allowable current can be calculated only during charging / discharging of the assembled battery 110, while the second allowable current calculation unit 704 There are no restrictions on the calculation conditions. However, in the allowable current calculated by the second allowable current calculation unit 704, an error occurs when there is a difference between the battery characteristics extracted in advance and the current battery characteristics. Therefore, in the present embodiment, when the allowable current calculation unit 302 satisfies the condition that the first allowable current calculation unit 703 can calculate the allowable current, that is, when the charge / discharge current of the assembled battery 110 is equal to or greater than a predetermined threshold, The output from one allowable current calculation unit 703 is determined as the final allowable current of the assembled battery 110.
- the allowable current calculation unit 302 includes an allowable charging current determination unit 705 and an allowable discharge current determination unit 706.
- the allowable charge current determination unit 705 determines the final allowable charge based on the allowable charge current Imax_chg1 calculated by the first allowable current calculation unit 703 and the allowable charge current Imax_chg2 calculated by the second allowable current calculation unit 704.
- the current Imax_chg is determined and output. Specifically, based on the value of the charging flag Rflag_chg output from the internal resistance detection unit 701, either the allowable charging current Imax_chg1 or the allowable charging current Imax_chg2 is selected and output as the allowable charging current Imax_chg.
- the allowable discharge current determination unit 706 determines the final allowable discharge based on the allowable discharge current Imax_dis1 calculated by the first allowable current calculation unit 703 and the allowable discharge current Imax_dis2 calculated by the second allowable current calculation unit 704.
- the current Imax_dis is determined and output. Specifically, based on the value of the discharge flag Rflag_dis output from the internal resistance detector 701, either the allowable discharge current Imax_dis1 or the allowable discharge current Imax_dis2 is selected and output as the allowable discharge current Imax_dis.
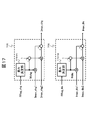
- FIG. 12 is a diagram illustrating an example of a block diagram of arithmetic processing performed by the allowable charging current determination unit 705 and the allowable discharge current determination unit 706 in the first embodiment of the present invention.
- the allowable charge current determination unit 705 realized using a switch selects the allowable charge current Imax_chg1 output from the first allowable current calculation unit 703, and the charge flag When Rflag_chg is “0”, the allowable charging current Imax_chg2 output from the second allowable current calculator 704 is selected.
- the allowable discharge current determination unit 706 realized using a switch selects the allowable discharge current Imax_dis1 output from the first allowable current calculation unit 703 when the discharge flag Rflag_dis is “1”, and discharge flag Rflag_dis. Is “0”, the allowable discharge current Imax_dis2 output from the second allowable current calculation unit 704 is selected.
- FIG. 13 is a diagram illustrating a state of the allowable current finally output from the allowable current calculation unit 302 in the first embodiment of the present invention.
- the charging / discharging current is changed into a sine wave having a fixed period as shown in the figure, and the case where the current value is positive is defined as charging, and the case where the current value is negative is defined as discharging.
- Rflag_chg is immediately set to “1” when the current direction is the charging direction
- Rflag_dis is immediately set to “1” when the current direction is the discharging direction.
- the internal resistance detection unit 701 can obtain the internal resistance value Rdet_chg on the charging side, and using this, the first allowable current calculation unit 703 calculates the allowable charging current Imax_chg1. Can be sought.
- the internal resistance value Rpred_chg on the charging side predicted by the battery state prediction unit 702 is estimated from the battery characteristics stored in advance, it is calculated by the second allowable current calculation unit 704 using this.
- the allowable charging current Imax_chg2 has a larger error than Imax_chg1.
- the allowable charging current determination unit 705 determines Imax_chg1 from the first allowable current calculation unit 703 as the final allowable charging current, and sets the allowable charging current Imax_chg. Output.
- the first allowable current calculator 703 cannot determine the allowable discharge current Imax_dis1.
- the second allowable current calculation unit 704 can obtain the allowable discharge current Imax_dis2 using the internal resistance value Rpred_dis on the discharge side predicted by the battery state prediction unit 702. Therefore, the allowable discharge current determination unit 706 determines Imax_dis2 from the second allowable current calculation unit 704 as the final allowable discharge current when the direction of the charge / discharge current is the charging direction, and sets the allowable discharge current Imax_dis as the allowable discharge current Imax_dis. Output.
- the internal resistance detection unit 701 can obtain the internal resistance value Rdet_dis on the discharge side, and the first allowable current calculation unit 703 uses this to determine the allowable discharge current Imax_dis1. Can be sought.
- the internal resistance value Rpred_dis on the discharge side predicted by the battery state prediction unit 702 is estimated from the battery characteristics stored in advance, it is calculated by the second allowable current calculation unit 704 using this.
- the allowable discharge current Imax_dis2 has a larger error than Imax_dis1.
- the allowable discharge current determination unit 706 determines Imax_dis1 from the first allowable current calculation unit 703 as the final allowable discharge current when the direction of the charge / discharge current becomes the discharge direction, and sets the allowable discharge current Imax_dis as the allowable discharge current Imax_dis. Output.
- the first allowable current calculation unit 703 cannot obtain the allowable charging current Imax_chg1.
- the second allowable current calculation unit 704 can obtain the allowable charging current Imax_chg2 by using the charging-side internal resistance value Rpred_chg predicted by the battery state prediction unit 702. Therefore, when the charge / discharge current direction is the discharge direction, allowable charge current determination unit 705 determines Imax_chg2 from second allowable current calculation unit 704 as the final allowable charge current, and sets the allowable charge current Imax_chg. Output.
- the allowable charging current determination unit 705 determines the allowable charging current Imax_chg2 obtained by the second allowable current calculation unit 704 as a final combination during discharging before the charging of the assembled battery 110 is started.
- the allowable charging current Imax_chg of the battery 110 is determined and output.
- the allowable charging current Imax_chg is determined by the first allowable current calculating unit 703 from the allowable charging current Imax_chg2 determined by the second allowable current calculating unit 704. Switching to an allowable charging current Imax_chg1 with a small error.
- the allowable discharge current determination unit 706 calculates the allowable discharge current Imax_dis2 obtained by the second allowable current calculation unit 704 during the charging before the discharge of the assembled battery 110 is started.
- the allowable discharge current Imax_dis is determined and output.
- the allowable discharge current Imax_dis is obtained from the allowable discharge current Imax_dis2 obtained by the second allowable current calculation unit 704, and obtained from the first allowable current calculation unit 703. Switching to the allowable discharge current Imax_dis1 with a small error.
- FIG. 14 shows a block diagram of an allowable current calculation unit 302 different from FIG. 7 outputs the detected internal resistance values Rdet_chg and Rdet_dis, and Rflag_chg and Rflag_dis indicating whether the internal resistance value has been detected.
- the internal resistance detection unit 701 in FIG. 14 outputs the detected DC resistance values ROdet_chg and ROdet_dis, the detected polarization voltage VPdet, and Rflag_chg and Rflag_dis indicating whether the battery information has been detected.
- 7 output the predicted internal resistance values Rpred_chg and Rpred_dis, but in FIG. 14, the predicted DC resistance values ROpred_chg and ROpred_dis and the predicted polarization voltage VPpred are output.
- the internal resistance detection unit 701 detects the current DC resistance value of the assembled battery 110 using the voltage measured by the voltage detection unit 140 and the current measured by the current detection unit 130. Specifically, the direct current resistance value is obtained using the following equation (11). In equation (11), t is time, V (t) is the voltage measured by the voltage detector 140 at time t, and I (t) is the current value measured by the current detector 130 at time t. Represents.
- ROdet (V (t) -V (t-1)) / (I (t) -I (t-1)) (11)
- the value of the DC resistance obtained by Expression (11) may become unstable depending on the measurement performance of the voltage detection unit 140 and the current detection unit 130 and the condition in which Expression (11) is executed. Therefore, if necessary, the ROdet obtained by executing the expression (11) a plurality of times may be averaged and used in subsequent calculations.
- ROdet_chg a charge flag for indicating whether or not the DC resistance value during charging of the assembled battery 110 has been detected is set to ' Set to 1 '.
- a predetermined invalid value or a predetermined DC resistance value is substituted into ROdet_dis representing the DC resistance value at the time of discharging to indicate whether or not the DC resistance value at the time of discharging the assembled battery 110 has been detected.
- the discharge flag Rflag_dis is set to “0”.
- the direct current resistance of the assembled battery 110 does not change greatly in a short time, when the direct current resistance value ROdet_dis at the time of discharge cannot be calculated, the direct current resistance value ROdet_dis at the time of discharge can be used. .
- Rflag_dis is set to ‘0’.
- the internal resistance detection unit 701 substitutes the obtained ROdet value into ROdet_dis, and Rflag_dis Is set to '1'.
- a predetermined invalid value or a predetermined DC resistance value is substituted for ROdet_chg, and Rflag_chg is set to ‘0’.
- the DC resistance value ROdet_chg at the time of charging cannot be calculated, the DC resistance value ROdet_chg at the time of charging previously obtained Can also be used.
- Rflag_chg is set to “0”.
- the DC resistance is When it is difficult to detect, the internal resistance detection unit 701 cannot calculate both the DC resistance value ROdet_chg during charging and the DC resistance value ROdet_dis during discharging. In this case, the internal resistance detection unit 701 substitutes a predetermined invalid value or a predetermined DC resistance value into ROdet_chg and ROdet_dis, respectively, and sets both Rflag_chg and Rflag_dis to ‘0’.
- the DC resistance value ROdet_chg at the time of charging and the DC resistance value ROdet_dis at the time of discharging cannot be calculated
- the DC resistance value ROdet_chg at the time of charging and the DC resistance value ROdet_dis at the time of discharging are utilized and charged for a predetermined time or more.
- Rflag_chg and Rflag_dis are set to “0”.
- the internal resistance detection unit 701 detects the DC resistance value of the assembled battery 110.
- the internal resistance detector 701 here detects the polarization voltage of the battery pack 110 (VPdet). Equation (12) shows a method for detecting the polarization voltage.
- VPdet CCV-OCV_SOC- I ⁇ ROdet (12)
- CCV is the voltage value during charging / discharging measured by the voltage detection unit 140
- OCV_SOC is the OCV value obtained from the SOC estimation result by the SOC table 501 shown in FIG. 5, and I is measured by the current detection unit 130.
- the current value ROdet is a DC resistance detected on the charging side or discharging side of the assembled battery 110 detected by the internal resistance detection unit 701.
- the detection result of VPdet is output together with the DC resistance values ROdet_chg and ROdet_dis, and Rflag_chg and Rflag_dis indicating whether or not the battery state has been detected, and is used for calculation of allowable current described later.
- the battery state prediction unit 702 in FIG. 14 will be described.
- the internal resistance detection unit 701 can detect a battery state such as a DC resistance value only when a predetermined condition is satisfied.
- the battery state predicting section 702 described here is the battery state predicting section 702 corresponding to the difference.
- the output from the battery includes an error, the battery state can always be output to the outside.
- the battery state prediction unit 702 has a function of predicting the state of the assembled battery 110 without using the voltage (CCV) measured by the voltage detection unit 140.
- the battery state prediction unit 702 predicts the battery state by using ROpred_chg representing the predicted DC resistance value during charging of the current assembled battery 110, ROpred_dis representing the predicted DC resistance value during discharging, and VPpred representing the predicted polarization voltage value. Output as battery characteristic information representing the result.
- ROpred_chg and ROpred_dis can be estimated from the SOC estimated by the charge state calculation unit 301 in FIG. 3 and the temperature received from the temperature detection unit 125 in FIG. This is because a resistance characteristic is extracted by performing a charge / discharge test on the assembled battery 110 or the single battery 111 in advance, and the result is stored in the storage unit 180 as a resistance characteristic table according to the SOC, temperature, and the like. realizable. Further, VPpred can predict the polarization voltage generated by connecting the polarization resistance 403 and the capacitance component 404 in parallel as described in the description of the expression (6).
- FIG. 15 is a block diagram of calculation processing performed by the first allowable current calculation unit 703.
- the influence of the polarization voltage is included in Rdet_chg and Rdet_dis to calculate the allowable current.
- the allowable current is obtained without converting the polarization voltage into a resistance value.
- Imax_chg1 ⁇ Vmax ⁇ (OCV_SOC + VPdet) ⁇ / ROdet_chg (13)
- Imax_dis1 ⁇ Vmin ⁇ (OCV_SOC + VPdet) ⁇ / ROdet_dis (14)
- the second allowable current calculation unit 704 obtains the allowable current of the assembled battery 110 by receiving the output from the battery state prediction unit 702 and VPdet that is the output from the internal resistance detection unit 701. Specifically, the predicted DC resistance predicted value ROpred_chg on the charge side, the predicted DC resistance value ROpred_dis on the discharge side, and OCV_SOC that is the OCV value obtained from the SOC estimated by the charge state calculation unit 301 in FIG.
- FIG. 16 is a block diagram of calculation processing performed by the second allowable current calculation unit 704.
- the reason why VPdet is used as an input in addition to VPpred is that the polarization voltage is a common parameter that can be detected on the charge side and used on the discharge side, and can be detected on the discharge side and used on the charge side.
- the VPdet detected by the internal resistance detection unit 701 can be used also by the second allowable current calculation unit 704, and before the VPdet is detected by the internal resistance detection unit 701, VPpred is used, and when VPdet is detected, priority is given to accuracy.
- the process of adopting VPdet can be realized.
- the second allowable current calculation unit 704 handles only the output from the battery state prediction unit 702, that is, the processing content in which the polarization voltage is only the predicted value VPpred. It is also possible to adopt.
- the polarization voltage predicted value VPpred or the polarization voltage VPdet detected in equation (12) is substituted.
- the polarization voltage predicted value VPpred is substituted and used for VP, and when an effective polarization voltage VPdet is detected by the internal resistance detector 701, VPdet is substituted for VP and used, and Imax_chg2 And Imax_dis2 are obtained.
- the allowable charging current determination unit 705 and the allowable discharge current determination unit 706 in FIG. 14 have the same functions as those in FIG. That is, the allowable charging current determination unit 705 selects either the allowable charging current Imax_chg1 or the allowable charging current Imax_chg2 based on the value of the charging flag Rflag_chg output from the internal resistance detection unit 701, and outputs it as the allowable charging current Imax_chg. To do.
- the allowable discharge current determination unit 706 selects either the allowable discharge current Imax_dis1 or the allowable discharge current Imax_dis2 based on the value of the discharge flag Rflag_dis output from the internal resistance detection unit 701, and outputs it as the allowable discharge current Imax_dis.
- the allowable current can be calculated with high accuracy as described with reference to FIG.
- the allowable current calculation unit 302 includes a first allowable current calculation unit 703, a second allowable current calculation unit 704, an allowable charging current determination unit 705, and an allowable discharge current determination unit 706. Is provided.
- the first allowable current calculation unit 703 obtains the allowable charging current Imax_chg1 and the allowable discharging current Imax_dis1 as the allowable current of the assembled battery 110 based on the voltage of the assembled battery 110 detected by the voltage detecting unit 140.
- the second allowable current calculation unit 704 obtains the allowable charging current Imax_chg2 and the allowable discharging current Imax_dis2 as the allowable current of the assembled battery 110 without using the voltage of the assembled battery 110.
- the allowable charging current determining unit 705 determines the allowable charging current Imax_chg of the assembled battery 110 according to the state of the assembled battery 110 based on at least one of the allowable charging current Imax_chg1 and the allowable charging current Imax_chg2, and the allowable discharging current determining unit 706 determines the allowable discharge current Imax_dis of the assembled battery 110 according to the state of the assembled battery 110 based on at least one of the allowable discharge current Imax_dis1 and the allowable discharge current Imax_dis2. Since it did in this way, the allowable current of the assembled battery 110 can be detected with high accuracy.
- the allowable charging current determination unit 705 determines the allowable charging current Imax_chg1 as the allowable charging current Imax_chg of the assembled battery 110 when the assembled battery 110 is in a state where the allowable charging current Imax_chg1 is obtained, and the allowable charging current When the assembled battery 110 is in a state where Imax_chg1 cannot be obtained, the allowable charging current Imax_chg2 is determined as the allowable charging current Imax_chg of the assembled battery 110.
- the charging current of the assembled battery 110 is equal to or greater than a predetermined threshold, it is determined that the assembled battery 110 is in a state where the allowable charging current Imax_chg1 is obtained, and the allowable charging current Imax_chg1 is determined as the allowable charging of the assembled battery 110.
- the allowable charging current Imax_chg is determined as the allowable charging of the assembled battery 110.
- the allowable charging current Imax_chg2 is The current is determined as Imax_chg.
- the allowable discharge current determination unit 706 determines the allowable discharge current Imax_dis1 as the allowable discharge current Imax_dis of the assembled battery 110, and allows the allowable discharge current Imax_dis1. Is determined as the allowable discharge current Imax_dis of the assembled battery 110. Specifically, when the discharge current of the assembled battery 110 is equal to or greater than a predetermined threshold, it is determined that the assembled battery 110 is in a state where the allowable discharge current Imax_dis1 is obtained, and the allowable discharge current Imax_dis1 is set to the allowable discharge current of the assembled battery 110.
- the allowable discharge current Imax_dis is determined and the discharge current of the assembled battery 110 is less than the threshold, it is determined that the assembled battery 110 is in a state where the allowable discharge current Imax_dis1 cannot be obtained, and the allowable discharge current Imax_dis2 is determined as the allowable discharge of the assembled battery 110. Determined as current Imax_dis. Since it did in this way, according to the state of the assembled battery 110, an optimal allowable current can be determined.
- the allowable charging current determination unit 705 determines the allowable charging current Imax_chg2 as the allowable charging current Imax_chg of the assembled battery 110 before the charging of the assembled battery 110 is started, and charging of the assembled battery 110 is started. After that, the allowable charging current Imax_chg of the assembled battery 110 is switched from the allowable charging current Imax_chg2 to the allowable charging current Imax_chg1. Further, the allowable discharge current determining unit 706 determines the allowable discharge current Imax_dis2 as the allowable discharge current Imax_dis of the assembled battery 110 before the discharge of the assembled battery 110 is started, and after the discharge of the assembled battery 110 is started.
- the allowable charging current determining unit 705 and the allowable discharging current determining unit 706 determine the allowable charging current Imax_chg1 as the allowable charging current Imax_chg of the assembled battery 110 for the charging side.
- the allowable discharge current Imax_dis2 is determined as the allowable discharge current Imax_dis of the battery pack 110.
- the allowable charging current Imax_chg2 is determined as the allowable charging current Imax_chg of the assembled battery 110 for the charging side
- the allowable discharging current Imax_dis1 of the assembled battery 110 is determined for the discharging side. Determined as Imax_dis.
- the allowable charging current Imax_chg and the allowable discharging current Imax_dis of the assembled battery 110 are set to the allowable charging current Imax_chg1 or the allowable discharging current Imax_dis1 for each of the charging side and the discharging side. Switching between charging current Imax_chg2 or allowable discharge current Imax_dis2. Since it did in this way, according to switching of charging / discharging of the assembled battery 110, a suitable allowable current can be selected.
- FIG. 17 is a diagram illustrating an example of a block diagram of arithmetic processing performed by the allowable charging current determination unit 705 and the allowable discharge current determination unit 706 in the second embodiment of the present invention.
- the allowable charge current determination unit 705 and the allowable discharge current determination unit 706 are provided with weight determination units 1701A and 1701B, respectively.
- the weight determination units 1701A and 1701B have a function of outputting weight coefficients Wchg and Wdis that continuously change between 0 and 1 when the charge flag Rflag_chg or the discharge flag Rflag_dis changes.
- the weight determination unit 1701A changes the weight coefficient Wchg from 0 to 1 with a predetermined gradient, and conversely, the charge flag Rflag_chg changes to “1”.
- the weight determination unit 1701A changes the weight coefficient Wchg from 1 to 0 with a predetermined gradient.
- the discharge flag Rflag_dis changes from “0” to “1”
- the weight determination unit 1701B changes the weight coefficient Wdis from 0 to 1 with a predetermined gradient, and conversely, the discharge flag Rflag_dis changes from “1” to “1”.
- the weight determination unit 1701B changes the weight coefficient Wdis from 1 to 0 with a predetermined gradient.
- the allowable charging current determination unit 705 and the allowable discharge current determination unit 706 use the weighting factors Wchg and Wdis output as described above to calculate the first allowable current calculation unit according to the following equations (17) and (18).
- the allowable charge current Imax_chg1 and allowable discharge current Imax_dis1 from 703 and the allowable charge current Imax_chg2 and allowable discharge current Imax_dis2 from the second allowable current calculation unit 704 are respectively weighted, and the final allowable current of the assembled battery 110 is calculated. calculate.
- Imax_chg Wchg x Imax_chg1 + (1-Wchg) x Imax_chg2 (17)
- Imax_dis Wdis ⁇ Imax_dis1 + (1 ⁇ Wdis) ⁇ Imax_dis2 (18)
- FIG. 18 is a diagram illustrating a state of the allowable current finally output from the allowable current calculation unit 302 in the second embodiment of the present invention.
- the charge / discharge current was changed to a sine wave with a constant period as shown in the figure, and the case where the current value was positive was defined as charging, and the case where the current value was negative was defined as discharging.
- Rflag_chg is immediately set to “1” when the current direction is the charging direction
- Rflag_dis is immediately set to “1” when the current direction is the discharging direction.
- the allowable charging current determining unit 705 and the allowable discharging current determining unit 706 set the weighting coefficient Wchg to 1 and the weighting coefficient Wdis to 0, respectively. Thereby, on the charge side, the weight for the allowable charge current Imax_chg1 from the first allowable current calculation unit 703 is relatively increased, and for the discharge side, the weight for the allowable discharge current Imax_dis2 from the second allowable current calculation unit 704. Is relatively large.
- the allowable charge current determination unit 705 gradually changes the weighting coefficient Wchg from 1 to 0.
- the weighting for the allowable charging current Imax_chg1 is gradually decreased, and the weighting for the allowable charging current Imax_chg2 is gradually increased.
- the allowable charging current Imax_chg output from the allowable charging current determination unit 705 gradually changes from Imax_chg1 to Imax_chg2, as shown in the figure.
- the allowable discharge current determination unit 706 gradually changes the weighting coefficient Wdis from 0 to 1.
- the weighting for the allowable discharge current Imax_dis1 is gradually increased, and the weighting for the allowable discharge current Imax_dis2 is gradually decreased.
- the allowable discharge current Imax_dis output from the allowable discharge current determination unit 706 gradually changes from Imax_dis2 to Imax_dis1, as shown in the figure.
- the allowable charging current determining unit 705 and the allowable discharging current determining unit 706 set the weighting coefficient Wchg to 0 and the weighting coefficient Wdis to 1, respectively.
- the weighting for the allowable charging current Imax_chg2 from the second allowable current calculating unit 704 is relatively increased, and for the discharging side, the weighting for the allowable discharging current Imax_dis1 from the first allowable current calculating unit 703. Is relatively large.
- the allowable charge current determination unit 705 gradually changes the weighting coefficient Wchg from 0 to 1.
- the weighting for the allowable charging current Imax_chg1 is gradually increased, and the weighting for the allowable charging current Imax_chg2 is gradually decreased.
- the allowable charging current Imax_chg output from the allowable charging current determination unit 705 gradually changes from Imax_chg2 to Imax_chg1, as shown in the figure.
- the allowable discharge current determining unit 706 gradually changes the weighting coefficient Wdis from 1 to 0.
- the weighting for the allowable discharge current Imax_dis1 is gradually decreased, and the weighting for the allowable discharge current Imax_dis2 is gradually increased.
- the allowable discharge current Imax_dis output from the allowable discharge current determination unit 706 gradually changes from Imax_dis1 to Imax_dis2, as shown in the figure.
- the first allowable current calculation unit 703 uses these values.
- the allowable charging current Imax_chg1 and the allowable discharging current Imax_dis1 are calculated, there is a possibility that a large error is included in the calculation result.
- the maximum value, the minimum value, the average value, and the like of the internal resistance value assumed according to the characteristics of the assembled battery 110 can be considered. The larger the difference is, the larger the error included in the calculation result of the first allowable current calculation unit 703 is.
- the last calculated internal resistance value is held in the internal resistance detection unit 701, and when the internal resistance detection unit 701 cannot execute the calculation of the internal resistance value, the held internal resistance value is output. It is preferable to do. In this way, it is possible to prevent the allowable charging current Imax_chg and the allowable discharging current Imax_dis output from the allowable charging current determining unit 705 and the allowable discharging current determining unit 706 from changing abruptly when charging / discharging is switched. it can.
- the allowable charging current determining unit 705 determines a weighting coefficient Wchg for the allowable charging current Imax_chg1 and the allowable charging current Imax_chg2, and weights the allowable charging current Imax_chg1 and the allowable charging current Imax_chg2 based on the weighting coefficient Wchg, respectively. By doing so, the allowable charging current Imax_chg of the assembled battery 110 is determined.
- the allowable discharge current determination unit 706 determines a weighting factor Wdis for the allowable discharge current Imax_dis1 and the allowable discharge current Imax_dis2, and weights and sums the allowable discharge current Imax_dis1 and the allowable discharge current Imax_dis2 based on the weighting factor Wdis. Thus, the allowable discharge current Imax_dis of the assembled battery 110 is determined. Since it did in this way, an appropriate allowable current can be calculated
- the allowable charging current determination unit 705 and the allowable discharge current determination unit 706 change the weighting factors Wchg and Wdis, respectively, while the assembled battery 110 is being charged or discharged.
- the allowable charging current determination unit 705 relatively increases the weighting for the allowable charging current Imax_chg2 before the charging of the assembled battery 110 is started, and after the charging of the assembled battery 110 is started, The weighting for the charging current Imax_chg1 is gradually increased, and the weighting for the allowable charging current Imax_chg2 is gradually decreased.
- the allowable discharge current determination unit 706 relatively increases the weighting for the allowable discharge current Imax_dis2 before the discharge of the assembled battery 110 is started, and after the discharge of the assembled battery 110 is started, the allowable discharge is determined.
- the weight for the current Imax_dis1 is gradually increased, and the weight for the allowable discharge current Imax_dis2 is gradually decreased. Since it did in this way, an allowable electric current can be changed smoothly at the time of the charge / discharge switching of the assembled battery 110.
- the block diagram of the arithmetic processing performed by the allowable charging current determination unit 705 and the allowable discharge current determination unit 706 is the same as that in FIG. That is, the allowable charging current determination unit 705 and the allowable discharge current determination unit 706 are provided with weight determination units 1701A and 1701B, respectively.
- the weight determination units 1701A and 1701B receive the charge flag Rflag_chg and the discharge flag Rflag_dis, respectively, and the weight coefficient Wchg that continuously changes between 0 and 1 based on these values. , Wdis is described as output.
- the first allowable current calculation unit 703 and the second allowable current calculation unit 704 calculate the error of the respective allowable currents, and the weight determination units 1701A and 1701B use the weighting factor Wchg. , Wdis will be described as an example.
- the first allowable current calculation unit 703 adds an allowable charging current error ⁇ Imax_chg1 and an allowable discharging current error ⁇ Imax_dis1 that represent these errors in addition to the calculation of the allowable charging current Imax_chg1 and the allowable discharging current Imax_dis1 described above. Perform the operation.
- second allowable current calculation unit 704 further calculates allowable charge current error ⁇ Imax_chg2 and allowable discharge current error ⁇ Imax_dis2 representing these errors. .
- the allowable charging current error ⁇ Imax_chg1 obtained by the first allowable current calculating unit 703 and the allowable charging current error ⁇ Imax_chg2 obtained by the second allowable current calculating unit 704 are input to the weight determining unit 1701A by the allowable charging current determining unit 705. Is done.
- the allowable discharge current error ⁇ Imax_dis1 obtained by the first allowable current calculation unit 703 and the allowable discharge current error ⁇ Imax_dis2 obtained by the second allowable current calculation unit 704 are input to the weight determination unit 1701B by the allowable discharge current determination unit 706. Is done.
- the allowable charge current error ⁇ Imax_chg1 and the allowable discharge current error ⁇ Imax_dis1, the allowable charge current error ⁇ Imax_chg2 and the allowable discharge current error ⁇ Imax_dis2 are the measurement errors of the current detection unit 130, the voltage detection unit 140, and the temperature detection unit 125, and It is possible to calculate by grasping in advance the difference between the equivalent circuit and the actual battery voltage and using these as inputs.
- the weight determination units 1701A and 1701B determine the weighting factors Wchg and Wdis by the following equations (19) and (20), respectively, using the input allowable current errors.
- Wchg ⁇ Imax_chg2 2 / ( ⁇ Imax_chg1 2 + ⁇ Imax_chg2 2 ) (19)
- Wdis ⁇ Imax_dis2 2 / ( ⁇ Imax_dis1 2 + ⁇ Imax_dis2 2 ) (20)
- the allowable charging current determining unit 705 and the allowable discharging current determining unit 706 can calculate the allowable current of the final assembled battery 110 according to the above equations (17) and (18), respectively. Can be calculated.
- the processing may be simplified by determining the weight coefficients Wchg and Wdis according to only the error included in the calculation result of the first allowable current calculation unit 703, respectively.
- the allowable charge current determination unit 705 and the allowable discharge current determination unit 706 respectively calculate the weighting factors Wchg and Wdis based on the allowable charge current error ⁇ Imax_chg1 and the allowable discharge current error ⁇ Imax_dis1 obtained by the first allowable current calculation unit 703. decide.
- the first allowable current calculation unit 703 uses these values.
- the allowable charging current Imax_chg1 and the allowable discharging current Imax_dis1 are calculated, there is a possibility that a large error is included in the calculation result. Therefore, in such a case, it is preferable that the values of the allowable charging current error ⁇ Imax_chg1 and the allowable discharging current error ⁇ Imax_dis1 output from the first allowable current calculation unit 703 are the maximum values within an assumed range.
- the weighting for the allowable charging current Imax_chg1 and the allowable discharging current Imax_dis1 including a large error is minimized, while the weighting for the allowable charging current Imax_chg2 and the allowable discharging current Imax_dis2 is maximized to obtain an appropriate allowable current. be able to.
- the first allowable current calculation unit 703 performs the allowable charging current error ⁇ Imax_chg1 that represents the error of the allowable charging current Imax_chg1 and the allowable discharge current that represents the error of the allowable discharge current Imax_dis1.
- An error ⁇ Imax_dis1 is obtained.
- the second allowable current calculation unit 704 obtains an allowable charging current error ⁇ Imax_chg2 that represents an error in the allowable charging current Imax_chg2, and an allowable discharge current error ⁇ Imax_dis2 that represents an error in the allowable discharge current Imax_dis2.
- the allowable charging current determination unit 705 and the allowable discharge current determination unit 706 determine the weighting factors Wchg and Wdis based on at least one of these errors. Since it did in this way, a suitable allowable current can be calculated
- the battery state prediction unit 702 predicts the state of the assembled battery 110 according to the battery characteristics obtained by performing a charge / discharge test in advance, if the battery characteristic changes as described above, an error occurs in the battery state prediction result. . Therefore, this error is also included in the allowable charge current Imax_chg2 and the allowable discharge current Imax_dis2 calculated by the second allowable current calculation unit 704 using the prediction result of the battery state prediction unit 702.
- FIG. 19 shows the allowable current finally output from the allowable current calculation unit 302 when the calculation accuracy of the second allowable current calculation unit 704 is reduced without performing the correction in the fourth embodiment of the present invention. It is a figure which shows a mode.
- the allowable charge current Imax_chg1 output from the first allowable current calculation unit 703, as shown in FIG.
- the difference between the allowable discharge current Imax_dis1 and the allowable charge current Imax_chg2 and the allowable discharge current Imax_dis2 output from the second allowable current calculation unit 704 is increased. Therefore, when charging / discharging of the assembled battery 110 is switched, a large fluctuation occurs in the allowable current output from the allowable current calculation unit 302.
- FIG. 20 is an example of a block diagram of the allowable current calculation unit 302 in the fourth embodiment of the present invention.
- correction units 2001A and 2001B are further added in FIG.
- the correcting unit 2001A compares the allowable charging current Imax_chg1 from the first allowable current calculating unit 703 with the allowable charging current Imax_chg2 from the second allowable current calculating unit 704, and determines the allowable charging current Imax_chg2 based on the comparison result. to correct.
- the correction unit 2001B compares the allowable discharge current Imax_dis1 from the first allowable current calculation unit 703 with the allowable discharge current Imax_dis2 from the second allowable current calculation unit 704, and determines the allowable discharge current Imax_dis2 based on the comparison result. to correct.
- the correction unit 2001A obtains a difference between the allowable charging current Imax_chg1 and the allowable charging current Imax_chg2, and corrects the allowable charging current Imax_chg2 using a correction coefficient determined based on the difference.
- the ratio between the allowable charging current Imax_chg1 and the allowable charging current Imax_chg2 is obtained, and the allowable charging current Imax_chg2 is corrected using a correction coefficient determined based on this ratio. Then, the correction result is output as the corrected allowable charging current Imax_chg2 '.
- the correction unit 2001B calculates a difference between the allowable discharge current Imax_dis1 and the allowable discharge current Imax_dis2, and corrects the allowable discharge current Imax_dis2 using a correction coefficient determined based on the difference.
- a ratio between the allowable discharge current Imax_dis1 and the allowable discharge current Imax_dis2 is obtained, and the allowable discharge current Imax_dis2 is corrected using a correction coefficient determined based on this ratio.
- the correction result is output as a corrected allowable discharge current Imax_dis2 '.
- it is good also as a correction coefficient common by the charge side and the discharge side by determining a correction coefficient from the average value of these differences and ratios.
- the correction may be performed when the difference or ratio is out of the predetermined range without performing the correction.
- a correction coefficient according to the charging / discharging time of the assembled battery 110 and the polarization voltage such as VPpred that can be output from the battery state prediction unit 702.
- the correction units 2001A and 2001B hold in advance a plurality of correction coefficients according to the difference or ratio between the allowable charging current Imax_chg1 and the allowable charging current Imax_chg2, and the difference or ratio between the allowable discharging current Imax_dis1 and the allowable discharging current Imax_dis2.
- the allowable charging current Imax_chg2 and the allowable discharging current Imax_dis2 can be corrected using the correction coefficient selected from these.
- FIG. 21 is another example of a block diagram of the allowable current calculation unit 302 in the fourth embodiment of the present invention.
- correction units 2101A and 2101B are further added in FIG.
- the correction unit 2101A compares the allowable charging current Imax_chg1 from the first allowable current calculation unit 703 with the allowable charging current Imax_chg2 from the second allowable current calculation unit 704, and based on the comparison result, the battery state prediction unit 702 Among the battery characteristic information output as the prediction result of the battery state, the second allowable current calculation unit 704 corrects what is used for obtaining the allowable charging current Imax_chg2.
- the correction unit 2101B compares the allowable discharge current Imax_dis1 from the first allowable current calculation unit 703 with the allowable discharge current Imax_dis2 from the second allowable current calculation unit 704, and based on the comparison result, the battery state prediction unit 702 Among the battery characteristic information output as the prediction result of the battery state is corrected by the second allowable current calculation unit 704 used to obtain the allowable discharge current Imax_dis2.
- the correction unit 2101A obtains the difference or ratio between the allowable charging current Imax_chg1 and the allowable charging current Imax_chg2, and in the direction in which these are eliminated, the internal resistance prediction value Rpred_chg during charging output from the battery state prediction unit 702 Correct.
- the correction unit 2101B obtains the difference or ratio between the allowable discharge current Imax_dis1 and the allowable discharge current Imax_dis2, and corrects the predicted internal resistance value Rpred_dis at the time of discharge output from the battery state prediction unit 702 in a direction in which these are eliminated. To do. In addition, you may perform a correction
- the correction may be performed when the difference or ratio is out of the predetermined range without performing the correction.
- the correction coefficient may be determined according to the charging / discharging time of the battery pack 110 and the polarization voltage such as VPpred that can be output by the battery state prediction unit 702. You may make it correct
- the correction units 2101A and 2101B hold in advance a plurality of correction coefficients corresponding to the difference or ratio between the allowable charge current Imax_chg1 and the allowable charge current Imax_chg2, and the difference or ratio between the allowable discharge current Imax_dis1 and the allowable discharge current Imax_dis2. Then, the internal resistance prediction values Rpred_chg, Rpred_dis, etc. can be corrected using the correction coefficient selected according to the difference or ratio.
- the outputs of the first allowable current calculation unit 703 and the second allowable current calculation unit 704 are compared, and based on the comparison result, the first The allowable current error included in the output of the second allowable current calculation unit 704 can be improved.
- FIG. 22 is a diagram illustrating a state of the allowable current finally output from the allowable current calculation unit 302 in the fourth embodiment of the present invention.
- Imax_chg1 output from the first allowable current calculation unit 703 and Imax_chg2 output from the second allowable current calculation unit 704 within the period from time T0 to time T1. Yes.
- Imax_chg2 output from the second allowable current calculation unit 704 is corrected by the above correction processing.
- Imax_dis2 output from the second allowable current calculation unit 704 is corrected by the above correction processing.
- the allowable current calculation unit 302 includes a first allowable current calculation unit 703, a second allowable current calculation unit 704, an allowable charging current determination unit 705, and an allowable discharge current determination unit 706. , Correction units 2001A and 2001B, or correction units 2101A and 2101B.
- the first allowable current calculation unit 703 obtains the allowable charging current Imax_chg1 and the allowable discharging current Imax_dis1 as the allowable current of the assembled battery 110 based on the voltage of the assembled battery 110 detected by the voltage detecting unit 140.
- the second allowable current calculation unit 704 obtains the allowable charging current Imax_chg2 and the allowable discharging current Imax_dis2 as the allowable current of the assembled battery 110 without using the voltage of the assembled battery 110.
- Correction units 2001A and 2101A compare allowable charging current Imax_chg1 and allowable charging current Imax_chg2, and perform predetermined correction processing based on the comparison result.
- Correction units 2001B and 2101B compare allowable discharge current Imax_dis1 and allowable discharge current Imax_dis2, and perform predetermined correction processing based on the comparison result. Since it did in this way, the allowable current of the assembled battery 110 can be detected with high accuracy in consideration of the influence of the increase in internal resistance according to the deterioration state of the assembled battery 110.
- the correction units 2001A and 2001B perform correction processing by correcting the calculation results of the allowable charge current Imax_chg2 and the allowable discharge current Imax_dis2 by the second allowable current calculation unit 704, respectively. Further, the correction units 2101A and 2101B correct the internal resistance prediction values Rpred_chg and Rpred_dis, which are characteristic information of the assembled battery 110 used by the second allowable current calculation unit 704 to obtain the allowable charging current Imax_chg2 and the allowable discharging current Imax_dis2, respectively. Perform correction processing. Since it did in this way, according to the raise of the internal resistance of the assembled battery 110, an appropriate correction
- the correction units 2001A, 2001B, 2101A, and 2101B have a plurality of correction coefficients according to the difference or ratio between the allowable charge current Imax_chg1 and the allowable charge current Imax_chg2, or the difference or ratio between the allowable discharge current Imax_dis1 and the allowable discharge current Imax_dis2.
- Each correction process is performed using a correction coefficient selected from among the plurality of correction coefficients. Since it did in this way, a correction
- the correction units 2001A, 2001B, 2101A, and 2101B can determine the correction coefficient used for each correction process according to the charging / discharging time of the battery pack 110 or the polarization voltage such as VPpred. In this way, more appropriate correction processing can be performed in consideration of the deterioration state of the assembled battery 110.
- the correction units 2001A and 2101A compare the allowable charging current Imax_chg1 and the allowable charging current Imax_chg2 when the assembled battery 110 is charged, and perform respective correction processes based on the comparison result. Further, the correction units 2001B and 2101B compare the allowable discharge current Imax_dis1 and the allowable discharge current Imax_dis2 when the assembled battery 110 is discharged, and perform respective correction processes based on the comparison result. Since it did in this way, according to the charging / discharging state of the assembled battery 110, the allowable electric current made into the object of a correction process can be switched appropriately.
- FIG. 23 is a block diagram showing the processing contents performed by the assembled battery control unit 150 in the fifth embodiment of the present invention.
- the assembled battery control unit 150 of this embodiment monitors the output of the allowable current calculation unit 302 and compares the assembled battery 110 with the block diagram shown in FIG. 3 in the first embodiment. It further includes a deterioration estimation unit 2301 for estimating the deterioration state.
- the battery pack 110 undergoes characteristic changes such as an increase in internal resistance and a decrease in full charge capacity when deterioration progresses as charging and discharging are repeated.
- the deterioration estimation unit 2301 estimates the deterioration of the assembled battery 110 by monitoring the degree of decrease in the allowable current.
- SOH the SOH of the battery pack 110 when the calculation result of the degree of decrease in the allowable current using the following formula (21) is defined as SOH is obtained.
- Imax_new represents the allowable current of the assembled battery 110 when new
- Imax_det represents the current allowable current of the assembled battery 110 (during deterioration).
- SOH Imax_det / Imax_new (21)
- the allowable charging current determining unit 705 determines the allowable charging current Imax_chg. Further, based on the allowable discharge current Imax_dis1 obtained by the first allowable current calculation unit 703 and the allowable discharge current Imax_dis2 obtained by the second allowable current calculation unit 704, the allowable discharge current determination unit 706 allows the allowable discharge current Imax_dis. Is determined.
- the degradation estimation unit 2301 pays attention to one or both of the allowable charging current Imax_chg and the allowable discharging current Imax_dis, and stores the output from the allowable current calculating unit 302 at the time of starting use of the assembled battery 110 as Imax_new.
- the current SOH of the assembled battery 110 can be estimated by Expression (21) using the current output from the allowable current calculation unit 302 as Imax_det.
- the allowable charge current Imax_chg and the allowable discharge current Imax_dis may be averaged to obtain Imax_det and Imax_new.
- the degradation estimation unit 2301 may directly estimate the SOH of the assembled battery 110 using the output from the first allowable current calculation unit 703 or the output from the second allowable current calculation unit 704 directly. That is, when paying attention to the output of the first allowable current calculation unit 703, one or both of the allowable charging current Imax_chg1 and the allowable discharging current Imax_dis1 at the time when the use of the assembled battery 110 is started is defined as Imax_new, and the current allowable charging current. With one or both of Imax_chg1 and allowable discharge current Imax_dis1 as Imax_det, the current SOH of the assembled battery 110 can be estimated by Expression (21).
- the allowable charging current Imax_chg2 and the allowable discharging current Imax_dis2 at the start of use of the assembled battery 110 is set to Imax_new, and the current allowable charging current is set.
- Imax_chg2 and allowable discharge current Imax_dis2 as Imax_det
- the current SOH of the assembled battery 110 can be estimated from Equation (21).
- the SOH of the assembled battery 110 estimated by the deterioration estimation unit 2301 as described above is received by the vehicle control unit 200.
- the vehicle control unit 200 determines that the assembled battery 110 has a life when the received SOH value falls below a predetermined threshold value. Note that the life estimation of the assembled battery 110 may be performed by the deterioration estimation unit 2301. Moreover, it is also possible to determine that the lifetime is reached when the allowable current value obtained by the calculation is less than the threshold value without using the parameter SOH.
- the deterioration estimation unit 2301 includes at least the calculation result of the allowable current by the first allowable current calculation unit 703 and the calculation result of the allowable current by the second allowable current calculation unit 704.
- One is monitored and the deterioration state of the assembled battery 110 is estimated. Since it did in this way, in the battery system 100, the progress of deterioration of the assembled battery 110 can be determined accurately.
- the deterioration estimation unit 2301 may determine whether the assembled battery 110 is at the end of its life based on the estimation result of the deterioration state of the assembled battery 110. If it does in this way, in battery system 100, lifetime judgment of assembled battery 110 can be performed exactly.
- FIG. 24 is a block diagram of the allowable current calculation unit 302 in the sixth embodiment of the present invention.
- a deterioration estimation unit 2401 is further added in FIG.
- the deterioration estimation unit 2401 monitors the coefficient Kc indicating the correction amount or correction rate of the allowable current by the correction unit 2001A and the coefficient Kd indicating the correction amount or correction rate of the allowable current by the correction unit 2001B, thereby monitoring the assembled battery 110.
- Estimate the SOH Since the allowable current decreases when the assembled battery 110 deteriorates, the correction unit 2001A and the correction unit 2001B correct the calculation result of the allowable current to match this. This is because the coefficients Kc and Kd indicating the correction amount or correction rate of the allowable current for this purpose can be used as parameters for grasping the degree of deterioration of the assembled battery 110 instead of SOH.
- the deterioration estimation unit 2401 monitors the result of the correction processing by the correction units 2001A and 2001B, and estimates the deterioration state of the assembled battery 110. Since it did in this way, in the battery system 100, the progress of deterioration of the assembled battery 110 can be determined accurately.
- the deterioration estimation unit 2401 may determine whether the assembled battery 110 is at the end of its life based on the estimation result of the deterioration state of the assembled battery 110. If it does in this way, in battery system 100, lifetime judgment of assembled battery 110 can be performed exactly.
- FIG. 25 is a block diagram of the allowable current calculation unit 302 in the seventh embodiment of the present invention.
- a deterioration estimation unit 2501 is further added in FIG.
- the deterioration estimation unit 2501 estimates the SOH of the assembled battery 110 by monitoring the correction result Rt for the output from the battery state prediction unit 702 by the correction units 2101A and 2101B.
- the internal resistance prediction values Rpred_chg and Rpred_dis corrected by the correction units 2101A and 2101B are acquired as correction results Rt
- the SOH of the current assembled battery 110 is estimated by using the following equation (22). Can do.
- R_new represents the internal resistance of the assembled battery 110 when new
- R_det represents the current internal resistance of the assembled battery 110 (during deterioration).
- SOH R_det / R_new (22)
- the correcting unit 2101A includes the allowable charging current Imax_chg1 obtained by the first allowable current calculating unit 703 and the allowable charging current Imax_chg2 obtained by the second allowable current calculating unit 704. Based on the above, the internal resistance prediction value Rpred_chg during charging output from the battery state prediction unit 702 is corrected. Further, the correction unit 2101B is configured to output the battery state prediction unit 702 from the allowable discharge current Imax_dis1 obtained by the first allowable current calculation unit 703 and the allowable discharge current Imax_dis2 obtained by the second allowable current calculation unit 704. The predicted internal resistance value Rpred_dis during discharge is corrected.
- the deterioration estimation unit 2501 pays attention to one or both of the correction results of the predicted internal resistance values Rpred_chg and Rpred_dis, and stores the output from the battery state prediction unit 702 as R_new when the use of the assembled battery 110 is started.
- the SOH of the current assembled battery 110 can be estimated by the expression (22), where R_det is the output from the current battery state prediction unit 702.
- R_det and R_new may be obtained by averaging the predicted internal resistance value Rpred_chg during charging and the predicted internal resistance value Rpred_dis during discharging.
- the deterioration estimation unit 2501 monitors the result of correction processing by the correction units 2101A and 2101B, and estimates the deterioration state of the assembled battery 110. Since it did in this way, in the battery system 100, the progress of deterioration of the assembled battery 110 can be determined accurately.
- the deterioration estimation unit 2501 may determine whether the assembled battery 110 is at the end of its life based on the estimation result of the deterioration state of the assembled battery 110. If it does in this way, in battery system 100, lifetime judgment of assembled battery 110 can be performed exactly.
- each of the above-described configurations, functions, processing units, etc. can be realized as hardware by designing all or a part thereof, for example, with an integrated circuit, or the processor executes a program for realizing each function. By doing so, it can also be realized as software. Information such as programs and tables for realizing each function can be stored in a storage device such as a memory or a hard disk, or a storage medium such as an IC card or a DVD. In addition, a program for causing the assembled battery control unit 150 of the battery system 100 according to each of the above-described embodiments to execute processing as described in each of the embodiments through an electric communication line such as the storage medium or the Internet is provided. You can also
- FIG. 26 is a diagram illustrating a state in which a program is provided to the assembled battery control unit 150.
- the personal computer 10 is connected to the assembled battery control unit 150, and supplies the assembled battery control unit 150 with a program provided from the server device 11 via the communication line 12 or a program read from the CD-ROM 13.
- the program can also be supplied from the server device 11 to the assembled battery control unit 150 via the communication line 12 without using the personal computer 10.
- the communication line 12 is a communication line such as the Internet or personal computer communication, a dedicated communication line, a mobile phone line network, or the like.
- the server 11 transmits the program to the personal computer 10 and the assembled battery control unit 150 via the communication line 12. That is, the program is converted into a data signal on a carrier wave and transmitted via the communication line 12.
- a program executable in the assembled battery control unit 150 can be provided as a computer-readable program product in various forms such as a recording medium and a carrier wave.
- battery system 110 assembled battery 111: single battery 112: single battery group 120: single battery management unit 121: single battery control unit 122: voltage detection circuit 123: control circuit 124: signal input Output circuit, 125: temperature detection unit, 130: current detection unit, 140: voltage detection unit, 150: assembled battery control unit, 160: signal communication means, 170: insulating element, 180: storage unit, 200: vehicle control unit, 300a to 300d: relay, 301: charge state calculation unit, 302: allowable current calculation unit, 400: inverter, 410: motor generator, 420: charger, 701: internal resistance detection unit, 702: battery state prediction unit, 703: First allowable current calculation unit, 704: second allowable current calculation unit, 705: allowable charge current determination unit, 706: allowable discharge current determination unit, 2001A, 2001B, 2 01A, 2101B: correction unit, 2301,2401,2501: deterioration estimating unit
Landscapes
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Power Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Sustainable Energy (AREA)
- Sustainable Development (AREA)
- Manufacturing & Machinery (AREA)
- General Chemical & Material Sciences (AREA)
- Electrochemistry (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Chemical & Material Sciences (AREA)
- Secondary Cells (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
- Tests Of Electric Status Of Batteries (AREA)
Abstract
電池状態検知装置は、電池の状態を検知する装置であって、電圧検知部により検知された電池の電圧に基づく電池の第一の許容電流を求める第一許容電流演算部と、電池の電圧を用いずに電池の第二の許容電流を求める第二許容電流演算部と、第一の許容電流と第二の許容電流を比較し、その比較結果に基づいて所定の補正処理を行う補正部と、を備える。
Description
本発明は、電池状態検知装置、二次電池システム、プログラム製品および電池状態検知方法に関する。
蓄電手段として二次電池を用いた電源装置、分散型電力貯蔵装置、電気自動車等の二次電池システムには、一般に、電池の状態を管理する電池制御回路が搭載されている。この電池制御回路が電池の状態を管理するために用いる指標の代表的な例としては、充電状態(SOC:State Of Charge)、劣化状態(SOH:State Of Health)、許容電流、許容電力などがある。SOCは、電池がどの程度まで充電されているか(電池に放電可能な電荷量がどの程度残っているか)を示すものであり、SOHは、電池が初期状態からどの程度劣化しているかを示すものである。許容電流は、電池が充放電可能な電流の最大値であり、許容電力は、許容電流に電池電圧を乗算した値である。
電池の許容電流には、充電時の許容電流を表す許容充電電流と、放電時の許容電流を表す許容放電電流とがある。SOCが高い場合は、許容充電電流が小さくなり、許容放電電流が大きくなる。反対に、SOCが低い場合は、許容充電電流が大きくなり、許容放電電流が小さくなる。電池制御回路がこれらの許容電流を正しく検知できれば、各種の二次電池システムが電池の充放電性能を最大限に活用できるようになる。そのため、高精度な許容電流検知方法の確立は、極めて重要である。
許容電流の検知に関する技術として、特許文献1に記載の電池の充放電可能電力推定方法が提案されている。これは、電池に流れる充放電電流の電流値を検出し、この充放電電流の電流値から算出される電流積算容量に基づき電池の開放電圧を求めて、得られた電流値と開放電圧とに基づき、電池の充放電変化点からの所定時間における充放電可能電力を推定するものである。
電池の劣化により内部抵抗が上昇すると、それに応じて電池の許容電流が変化する。そのため、電池の許容電流を高精度に検知するためには、電池の劣化状態に応じた内部抵抗の上昇による影響を考慮する必要がある。
本発明の一態様による電池状態検知装置は、電池の状態を検知する装置であって、電圧検知部により検知された前記電池の電圧に基づく前記電池の第一の許容電流を求める第一許容電流演算部と、前記電池の電圧を用いずに前記電池の第二の許容電流を求める第二許容電流演算部と、前記第一の許容電流と前記第二の許容電流を比較し、その比較結果に基づいて所定の補正処理を行う補正部と、を備える。
本発明の一態様による二次電池システムは、上記の電池状態検知装置と、前記電圧検知部により電圧が検知され、前記第一の許容電流および前記第二の許容電流の少なくとも一つに基づいて決定された許容電流に基づいて充放電される二次電池と、を備える。
本発明の一態様によるプログラム製品は、電池に接続された電池状態検知装置内のコンピュータにより実行されるプログラム製品であって、前記コンピュータを、前記電池の電圧検知結果に基づく前記電池の第一の許容電流を求める第一許容電流演算部と、前記電池の電圧検知結果を用いずに前記電池の第二の許容電流を求める第二許容電流演算部と、前記第一の許容電流と前記第二の許容電流を比較し、その比較結果に基づいて所定の補正処理を行う補正部として機能させる。
本発明の一態様による電池状態検知方法は、電池の状態を検知する方法であって、前記電池の電圧を検知し、前記電池の電圧検知結果に基づく前記電池の第一の許容電流を求め、前記電池の電圧検知結果を用いずに前記電池の第二の許容電流を求め、前記第一の許容電流と前記第二の許容電流を比較し、その比較結果に基づいて所定の補正処理を行う。
本発明の一態様による二次電池システムは、上記の電池状態検知装置と、前記電圧検知部により電圧が検知され、前記第一の許容電流および前記第二の許容電流の少なくとも一つに基づいて決定された許容電流に基づいて充放電される二次電池と、を備える。
本発明の一態様によるプログラム製品は、電池に接続された電池状態検知装置内のコンピュータにより実行されるプログラム製品であって、前記コンピュータを、前記電池の電圧検知結果に基づく前記電池の第一の許容電流を求める第一許容電流演算部と、前記電池の電圧検知結果を用いずに前記電池の第二の許容電流を求める第二許容電流演算部と、前記第一の許容電流と前記第二の許容電流を比較し、その比較結果に基づいて所定の補正処理を行う補正部として機能させる。
本発明の一態様による電池状態検知方法は、電池の状態を検知する方法であって、前記電池の電圧を検知し、前記電池の電圧検知結果に基づく前記電池の第一の許容電流を求め、前記電池の電圧検知結果を用いずに前記電池の第二の許容電流を求め、前記第一の許容電流と前記第二の許容電流を比較し、その比較結果に基づいて所定の補正処理を行う。
本発明によれば、電池の劣化状態に応じた内部抵抗の上昇による影響を考慮して、電池の許容電流を高精度に検知することができる。
以下、本発明の実施形態を図面に基づいて説明する。以下の各実施形態では、プラグインハイブリッド自動車(PHEV)の電源を構成する電池システムに対して本発明を適用した場合を例に挙げて説明する。
また、以下の各実施形態では、リチウムイオン電池を採用して単電池を直列に接続して組電池を構成しているが、単電池を並列接続したものを直列接続して組電池を構成してもよいし、直列接続した単電池を並列接続して組電池を構成してもよい。
<第1の実施形態>
図1は、本発明の第1の実施形態に係る電池システム100とその周辺の構成を示す図である。電池システム100はリレー300aと300bを介してインバータ400に接続され、リレー300cと300dを介して充電器420に接続される。電池システム100は、組電池110、単電池管理部120、電流検知部130、電圧検知部140、組電池制御部150、記憶部180を備える。
図1は、本発明の第1の実施形態に係る電池システム100とその周辺の構成を示す図である。電池システム100はリレー300aと300bを介してインバータ400に接続され、リレー300cと300dを介して充電器420に接続される。電池システム100は、組電池110、単電池管理部120、電流検知部130、電圧検知部140、組電池制御部150、記憶部180を備える。
組電池110は、複数の単電池111から構成される。単電池管理部120は、単電池111の状態を監視する。電流検知部130は、電池システム100に流れる電流を検知する。電圧検知部140は、組電池110の総電圧を検知する。組電池制御部150は、組電池110の状態を検知し、状態の管理等も行う。
組電池制御部150は、電池システム100において、組電池110の状態を検知する電池状態検知装置として機能する。この組電池制御部150は、単電池管理部120が送信する各単電池111の電池電圧や温度、電流検知部130が送信する電池システム100に流れる電流値、電圧検知部140が送信する組電池110の総電圧値を受け取る。組電池制御部150は、受け取ったこれらの情報をもとに、組電池110の状態を検知する。組電池制御部150による状態検知の結果は、単電池管理部120や車両制御部200に送信される。
組電池110は、電気エネルギーの蓄積および放出(直流電力の充放電)が可能な複数の単電池111を電気的に直列に接続して構成している。組電池110を構成する単電池111は、状態の管理・制御を実施する上で、所定の単位数にグループ分けされている。グループ分けされた単電池111は、電気的に直列に接続され、単電池群112a、112bを構成している。単電池群112を構成する単電池111の個数は、全ての単電池群112において同数でもよいし、単電池群112毎に単電池111の個数が異なっていてもよい。
単電池管理部120は、組電池110を構成する単電池111の状態を監視する。単電池管理部120は、単電池群112毎に設けられた単電池制御部121を備える。図1では、単電池群112aと112bに対応して、単電池制御部121aと121bが設けられている。単電池制御部121は、単電池群112を構成する単電池111の状態を監視および制御する。
本実施形態では、説明を簡略化するために、4個の単電池111を電気的に直列接続して単電池群112aと112bを構成し、単電池群112aと112bをさらに電気的に直列接続して合計8個の単電池111を備える組電池110とした。
組電池制御部150と単電池管理部120は、フォトカプラに代表される絶縁素子170および信号通信手段160を介して信号を送受信する。
組電池制御部150と、単電池管理部120を構成する単電池制御部121aおよび121bとの間の通信手段について説明する。単電池制御部121aおよび121bは、それぞれが監視する単電池群112aおよび112bの電位の高い順にしたがって直列に接続されている。組電池制御部150が単電池管理部120に送信した信号は、絶縁素子170および信号通信手段160を介して単電池制御部121aに入力される。単電池制御部121aの出力は信号通信手段160を介して単電池制御部121bに入力され、最下位の単電池制御部121bの出力は絶縁素子170および信号通信手段160を介して組電池制御部150へと伝送される。本実施形態1では、単電池制御部121aと単電池制御部121bの間は絶縁素子170を介していないが、絶縁素子170を介して信号を送受信することもできる。
記憶部180は、組電池110、単電池111、単電池群112の内部抵抗特性、満充電時の容量、分極電圧、劣化特性、個体差情報、SOCと開回路電圧(OCV:Open Circuit Voltage)の対応関係などの情報を格納する。さらに、単電池管理部120、単電池制御部121、組電池制御部150などの特性情報についてもあらかじめ記憶することができる。電池システム100や組電池制御部150等の動作が停止しても、記憶部180に記憶した各種情報は保持される。
組電池制御部150は、単電池管理部120、電流検知部130、電圧検知部140、車両制御部200からそれぞれ受け取った情報、後述するSOCテーブル501や抵抗特性テーブル901などを用いて、1つ以上の単電池111のSOC、SOH、許容充電・放電電流や電力などを検知するための演算を実行する。そして、演算結果に基づいて、単電池管理部120や車両制御部200に情報を出力する。
車両制御部200は、組電池制御部150が送信する情報を用いて、リレー300aと300bを介して電池システム100と接続されるインバータ400を制御する。また、リレー300cと300dを介して電池システム100に接続される充電器420を制御する。車両走行中には、電池システム100はインバータ400と接続され、組電池110が蓄えているエネルギーを用いて、モータジェネレータ410を駆動する。充電の際には、電池システム100は充電器420と接続され、家庭用の電源または充電スタンドからの電力供給によって充電される。
充電器420は、家庭または充電スタンドに代表される外部の電源を用いて組電池110を充電する際に用いられる。本実施形態1では、充電器420は車両制御部200からの指令に基づき充電電圧や充電電流などを制御する構成としているが、組電池制御部150からの指令に基づき制御を実施してもよい。また、充電器420は車両の構成、充電器420の性能、使用目的、外部の電源の設置条件などに応じて車両内部に設置してもよいし、車両の外部に設置することもできる。
電池システム100を搭載した車両システムが始動して走行する場合には、車両制御部200の管理のもと、電池システム100はインバータ400に接続され、組電池110が蓄えているエネルギーを用いてモータジェネレータ410を駆動する。回生時はモータジェネレータ410の発電電力により組電池110が充電される。電池システム100を備える車両が家庭用または充電スタンドに代表される外部の電源と接続された際には、車両制御部200が発信する情報に基づき電池システム100と充電器420とが接続され、組電池110が所定の条件になるまで充電される。充電によって組電池110に蓄えられたエネルギーは、次回の車両走行時に利用されるか、車両内外の電装品等を動作させるためにも利用される。さらに必要に応じて、家庭用の電源に代表される外部電源へも放出する場合がある。
図2は、単電池制御部121の回路構成を示す図である。単電池制御部121は、電圧検出回路122、制御回路123、信号入出力回路124、温度検知部125を備える。電圧検出回路122は、各単電池111の端子間電圧を測定する。制御回路123は、電圧検出回路122および温度検知部125から測定結果を受け取り、信号入出力回路124を介して組電池制御部150に送信する。なお、単電池制御部121に一般的に実装される、自己放電や消費電流ばらつき等に伴い発生する単電池111間の電圧やSOCばらつきを均等化する回路構成は、周知のものであると判断して記載を省略した。
図2における単電池制御部121が備える温度検知部125は、単電池群112の温度を測定する機能を有する。温度検知部125は、単電池群112全体として1つの温度を測定し、単電池群112を構成する単電池111の温度代表値としてその温度を取り扱う。温度検知部125が測定した温度は、単電池111、単電池群112、または組電池110の状態を検知するための各種演算に用いられる。図2はこれを前提とするため、単電池制御部121に1つの温度検知部125を設けた。単電池111毎に温度検知部125を設けて単電池111毎に温度を測定し、単電池111毎の温度に基づいて各種演算を実行することもできるが、この場合は温度検知部125の数が多くなる分、単電池制御部121の構成が複雑となる。
図2では、簡易的に温度検知部125を示した。実際は温度測定対象に温度センサが設置され、設置した温度センサが温度情報を電圧として出力する。これを測定した結果が制御回路123を介して信号入出力回路124に送信され、信号入出力回路124が単電池制御部121の外に測定結果を出力する。この一連の流れを実現する機能が単電池制御部121に温度検知部125として実装され、温度情報(電圧)の測定には電圧検出回路122を用いることもできる。
以下では組電池制御部150が行う各種演算を説明する。組電池制御部150は、マイクロコンピュータなどによって実現されるものであり、各種のプログラムを実行することで、以下に説明するような各種の処理や演算を行うことができる。
図3は、本発明の第1の実施形態において組電池制御部150が行う処理内容を表すブロック線図である。組電池制御部150は、充電状態演算部301と、許容電流演算部302とを機能的に有する。充電状態演算部301は、電圧、電流、温度を用いてSOCを求める。許容電流演算部302は、電圧、電流、温度と、充電状態演算部301が求めたSOCとを用いて、許容充電電流(Imax_chg)および許容放電電流(Imax_dis)を求める。Imax_chgは、充電時における組電池110の許容電流、すなわち組電池110を充電する際に流すことのできる最大の電流を表している。Imax_disは、放電時における組電池110の許容電流、すなわち組電池110を放電する際に流すことのできる最大の電流を表している。
充電状態演算部301は、電圧検知部140が計測した組電池110の端子間電圧を単電池111の直列数で除算して得られた電圧と、電流検知部130が計測した電流Iと、温度検知部125が計測した温度Tに基づき、組電池110のSOCの推定を行う。以下に、充電状態演算部301が行うSOC推定のための処理内容の一例として、電圧に基づくSOCの推定処理を説明する。
図4は単電池111の等価回路を示す回路図である。図4において、単電池111は、電圧源401と、直流抵抗402と、分極抵抗403と、キャパシタンス成分404から構成される。分極抵抗403とキャパシタンス成分404は並列接続され、その並列接続対と、電圧源401と、直流抵抗402とが直列接続されている。
直流抵抗402の抵抗値をRoと表し、分極抵抗403とキャパシタンス成分404の並列接続対の電圧に相当する分極電圧をVpと表すと、単電池111に電流Iを印加したときの単電池111の端子間電圧(CCV:Closed Circuit Voltage)は、以下の式(1)で表される。式(1)において、OCVは電圧源401の両端電圧である。このOCVは、充放電電流が流れていない時で、かつ、その電圧が時間的に一定である時の単電池111の端子間電圧に相当する。
CCV=OCV+I×Ro+Vp (1)
CCV=OCV+I×Ro+Vp (1)
OCVは、SOC(充電状態)の演算に用いられるが、単電池111が充放電されている状況では、OCVを直接測定することが不可能である。このため、式(1)を変形した以下の式(2)により、CCVからIRドロップと分極電圧Vpを差し引くことで、OCVが算出される。
OCV=CCV-I×Ro-Vp (2)
OCV=CCV-I×Ro-Vp (2)
直流抵抗402の抵抗値Roと分極電圧Vpは、単電池111から抽出される特性情報により決定することができる。単電池111の特性情報は、単電池111を充放電することで実験的に把握した値として記憶部180に予め格納されている。なお、直流抵抗402の抵抗値Roや分極電圧Vpを決定する際に用いる特性情報を、単電池111のSOCや温度、電流などに応じて変えるようにすると、高精度なOCVを得ることができる。また、端子間電圧CCVは、電圧検知部140の計測結果を単電池111の直列数で除算したものを用いるものとし、電流Iは、電流検知部130の計測結果から得られる。
図5は、記憶部180に格納されているSOCテーブル501の例を示す図である。SOCテーブル501は、単電池111のOCVと、単電池111のSOCとの対応関係を記述したデータテーブルである。データ形式は任意だが、ここでは説明の便宜上、グラフ形式で示す。なお、本実施形態ではデータテーブルを用いているが、数式などを用いることでOCVとSOCとの対応関係を表現することもできる。OCVからSOC、またはSOCからOCVへと変換できる方法であれば他の方法を用いてもよい。式(2)でOCVが算出されると、このSOCテーブル501を用いることによって、単電池111のSOCを推定することができる。
次に、充電状態演算部301が行うSOC推定のための処理内容の他の一例として、電流に基づくSOCの推定処理を説明する。充電状態演算部301は、以下の式(3)により単電池111のSOC推定を行うこともできる。式(3)において、SOC0は単電池111の充放電前の初期SOCの値を表し、電流Iは電流検知部130の計測値を表す。また、Qmaxは単電池111の満充電時の容量を表しており、これは、単電池111または組電池110を充放電することで実験的に把握した値として記憶部180に予め格納されている。
SOCi=SOC0+100×∫Idt/Qmax (3)
SOCi=SOC0+100×∫Idt/Qmax (3)
充電状態演算部301は、式(2)、式(3)のどちらを用いたSOC検出を行っても良いものとする。
以降では、図3における許容電流演算部302を説明する。許容電流演算部302は、電圧検知部140が計測した組電池110の端子間電圧を単電池111の直列数で除算して得られた電圧と、電流検知部130が計測した電流と、温度検知部125が計測した温度と、充電状態演算部301が求めたSOCとに基づき、組電池110(単電池111)の許容電流を求める機能を有する。許容電流は、組電池110(単電池111)が充放電可能な電流の最大値であり、充電時の許容充電電流と、放電時の許容放電電流に分類される。
図6は、許容充電電流と許容放電電流の関係を示す線図である。図6に示すように、単電池111のSOCが高い場合は、許容放電電流が大きく、許容充電電流は小さくなる。これとは逆に、単電池111のSOCが低い場合は、許容放電電流が小さく、許容充電電流は大きくなる。許容電流演算部302で求められた許容電流は、充電状態演算部301で求められたSOCと共に、外部に設置されるコントローラ(本実施例では車両制御部200)に送信される。これを受信した外部のコントローラは、許容電流の範囲内で組電池110の充放電を行う。
図7に、本発明の第1の実施形態における許容電流演算部302のブロック線図を示す。許容電流演算部302は、内部抵抗検知部701と、電池状態予測部702と、第一許容電流演算部703と、第二許容電流演算部704と、許容充電電流決定部705と、許容放電電流決定部706とを備える。図1の電池システム100では、マイクロコンピュータ等を用いて構成される組電池制御部150において所定のプログラムを実行することで、この組電池制御部150を、図7に示す各部として機能させることができる。
内部抵抗検知部701は、図3の充電状態演算部301により推定されたSOCと、電圧検知部140により計測された電圧と、電流検知部130により計測された電流とを用いて、組電池110の現在の内部抵抗値を演算する。具体的には、以下の式(4)、(5)を用いて、電圧検知部140の計測値から前述のようにして得られる充放電中のCCVと、SOCから得られるOCVとの差を、電流検知部130で計測された電流Iで除算することにより、組電池110の現在の内部抵抗値を演算することができる。なお、式(4)において、OCV_SOCは、図5に示したSOCテーブル501により、SOCの推定結果から得られるOCVの値を表している。
VDdet=CCV-OCV_SOC (4)
Rdet=VDdet/I (5)
VDdet=CCV-OCV_SOC (4)
Rdet=VDdet/I (5)
図8は、内部抵抗検知部701による内部抵抗値の演算方法の説明図である。図8において、線図801、802は、組電池110を放電したときの時間経過に応じたCCVとOCVの変動の様子をそれぞれ示している。図8に示すように、組電池110の放電を開始すると、OCVは時間経過に応じて徐々に減少する一方で、CCVは放電開始時に急激に低下し、その後は徐々に減少する。組電池110の放電を停止すると、CCVは急激に上昇し、その後、一定時間経過後にOCVと一致する。内部抵抗検知部701は、式(4)から図8に示した放電中のOCVとCCVの差分VDdetを算出し、式(5)によりこのVDdetを電流Iで割ることで、内部抵抗値Rdetを演算する。
なお、内部抵抗検知部701による内部抵抗値の演算は、電流検知部130による電流計測値が所定の閾値以上である場合にのみ実行される。閾値以上の充電電流が検知された場合、内部抵抗検知部701は、式(4)、(5)で得られたRdetの値を、充電時の内部抵抗値を表すRdet_chgに代入すると共に、組電池110の充電時の内部抵抗値を検知できたか否かを示すための充電フラグRflag_chgを‘1’にセットする。一方、放電時の内部抵抗値を表すRdet_disには、所定の無効値や予め定めた内部抵抗値を代入して、組電池110の放電時の内部抵抗値を検知できたか否かを示すための放電フラグRflag_disを‘0’にセットする。
反対に、閾値以上の放電電流が検知された場合、内部抵抗検知部701は、式(4)、(5)で得られたRdetの値をRdet_disに代入して、Rflag_disを‘1’にセットする。一方、Rdet_chgには、所定の無効値や予め定めた内部抵抗値を代入して、Rflag_chgを‘0’にセットする。
なお、閾値未満の電流が検知された場合、内部抵抗検知部701は、充電時の内部抵抗値Rdet_chgと、放電時の内部抵抗値Rdet_disのいずれについても、演算することができない。この場合、内部抵抗検知部701は、所定の無効値や予め定めた内部抵抗値をRdet_chgとRdet_disにそれぞれ代入し、Rflag_chgとRflag_disの両方を‘0’にセットする。
上記の内部抵抗検知部701が用いる電圧は、電圧検知部140が計測した組電池110の端子間電圧を、単電池111の直列数で除算して得られる電圧である。そのため、上記の演算によって得られる内部抵抗値は、組電池110を構成する各単電池111の平均的な内部抵抗値となる。以降、この内部抵抗値を使用して許容電流を求めるが、取り扱う電圧は単電池111相当の値にしておく必要がある。
次に、電池状態予測部702について説明する。電池状態予測部702は、電圧検知部140が測定した電圧(CCV)を用いることなしに、組電池110の状態を予測する機能を有する。この電池状態予測部702は、現在の組電池110の充電時における内部抵抗予測値を表すRpred_chgと、放電時における内部抵抗予測値を表すRpred_disを、電池状態の予測結果を表す電池特性情報として出力する。
電池状態予測部702において、Rpred_chgとRpred_disは、図3の充電状態演算部301により推定されたSOCや、図2の温度検知部125から受け取った温度から推定することができる。これは、組電池110または単電池111を予め充放電試験することで抵抗特性を抽出しておき、その結果をSOCと温度などに応じた抵抗特性テーブルとして記憶部180に記憶させておくことで実現できる。
図9は、記憶部180に格納されている抵抗特性テーブル901、902および903の例を示す図である。これらは、組電池110の内部抵抗と、組電池110のSOCとの対応関係を記述したデータテーブルであり、抵抗特性テーブル901は高温時の特性を、抵抗特性テーブル902は常温時の特性を、抵抗特性テーブル903は低温時の特性をそれぞれ表している。データ形式は任意だが、ここでは説明の便宜上、グラフ形式で示す。なお、本実施形態では、温度に応じた3種類のデータテーブルを用いているが、数式などを用いることで、内部抵抗とSOCおよび温度との対応関係を表現することもできる。
電池状態予測部702は、上記抵抗特性テーブルを用いて、図3の充電状態演算部301により推定されたSOCや、図2の温度検知部125から受け取った温度からRpred_chgとRpred_disとを推定する。なお、この内部抵抗の予測方法は一例であり、次の方法で内部抵抗を予測することもできる。すなわち、電池を充電している場合は充電側、電池を放電している場合は放電側の電圧降下予測値(VDpred)を、式(6)により求める。ここで、Iは現在の充放電電流、ROpredはSOCや温度などに応じて値を持たせた直流抵抗402の抵抗特性テーブル値、VPpredは分極抵抗403とキャパシタンス成分404を並列接続して生じる分極電圧を、計算により予測した結果である。分極電圧の予測は、予め組電池110もしくは単電池111を充放電試験して分極抵抗403の特性およびキャパシタンス成分404の特性(もしくは分極抵抗403とキャパシタンス成分404を乗算して得られる時定数の特性)を予め抽出し、分極抵抗403とキャパシタンス成分404を並列接続した場合の時々刻々と変化する電圧を計算すれば実現できる。求めたVDpredに対して式(5)のように現在の充放電電流Iで除算すれば、充電時にはRpred_chg、放電時にはRpred_disが、内部抵抗検知部701と近い形で求めることができる。なお、充電時におけるRpred_dis、放電時におけるRpred_chgは、式(5)(6)を用いずに、図9で説明した抵抗特性テーブルを用いて推定する。更に、充電も放電も検知されない場合は、充電側と放電側をともに、図9で説明した抵抗特性テーブルを用いる。
VDpred= I×ROpred+VPpred (6)
VDpred= I×ROpred+VPpred (6)
以上説明したように、内部抵抗検知部701は、電圧検知部140が検知した組電池110の電圧に基づいて、組電池110の内部抵抗値を検知する。内部抵抗値を検知するためには、組電池110の電圧検知結果を用いる必要がある。そのため、内部抵抗検知部701では、充電時の内部抵抗値Rdet_chgと、放電時の内部抵抗値Rdet_disとの両方を、同時には演算できないという制約がある。すなわち、前述したように、Rdet_chgについては、組電池110に流れる充電電流が閾値を超える充電時にのみ演算が可能である。また、Rdet_disについては、組電池110からの放電電流が閾値を超える放電時にのみ演算が可能である。
一方、電池状態予測部702は、電圧検知部140が検知した組電池110の電圧を用いずに、事前に記憶された組電池110の特性情報を用いて、組電池110の内部抵抗値の推定を行う。そのため、組電池110の充放電状態に関わらず、充電時の内部抵抗値を表すRpred_chgと、放電時の内部抵抗値を表すRpred_disとを、常時予測することが可能である。ただし、事前に抽出した組電池110の特性が現在の組電池110の特性と不一致である場合には、その差に応じた分だけ、電池状態予測部702からの出力には誤差が含まれる。
次に、第一許容電流演算部703と、第二許容電流演算部704について説明する。第一許容電流演算部703は、電圧検知部140により検知された組電池110の電圧に基づく許容電流を求める。具体的には、電圧検知部140による電圧計測結果を基に内部抵抗検知部701で検知された充電側の内部抵抗値Rdet_chgおよび放電側の内部抵抗値Rdet_disと、図3の充電状態演算部301により推定されたSOCから得られるOCVの値であるOCV_SOCと、組電池110の特性から定められる上限電圧Vmaxおよび下限電圧Vminとを用いて、以下の式(7)、(8)により、許容充電電流Imax_chg1と許容放電電流Imax_dis1をそれぞれ演算する。
Imax_chg1=(Vmax-OCV_SOC)/Rdet_chg (7)
Imax_dis1=(Vmin-OCV_SOC)/Rdet_dis (8)
Imax_chg1=(Vmax-OCV_SOC)/Rdet_chg (7)
Imax_dis1=(Vmin-OCV_SOC)/Rdet_dis (8)
図10は、第一許容電流演算部703が行う演算処理のブロック線図である。図10において、第一許容電流演算部703は、式(7)の演算に対応する第一充電電流演算部1001と、式(8)の演算に対応する第一放電電流演算部1002とにより構成されている。第一充電電流演算部1001は、内部抵抗検知部701から入力される充電側の内部抵抗値Rdet_chgと、充電状態演算部301から入力されるSOCとを用いて、式(7)により、許容充電電流Imax_chg1を演算して出力する。第一放電電流演算部1002は、内部抵抗検知部701から入力される放電側の内部抵抗値Rdet_disと、充電状態演算部301から入力されるSOCとを用いて、式(8)により、許容放電電流Imax_dis1を演算して出力する。
前述した通り、内部抵抗検知部701は、充電時においてのみRdet_chgを演算でき、放電時においてのみRdet_disを演算できる。そのため、第一許容電流演算部703も、充電時においてのみImax_chg1を演算でき、放電時においてのみImax_dis1を演算できるという制約がある。
第一許容電流演算部703は、電圧検知部140による電圧検知結果を用いて、許容充電電流Imax_chg1と許容放電電流Imax_dis1を演算する。一方、第二許容電流演算部704は、電圧検知部140により検知された組電池110の電圧を用いずに、組電池110の許容電流を求める。具体的には、電圧検知部140による電圧計測結果を用いずに電池状態予測部702で予測された充電側の内部抵抗予測値Rpred_chg、放電側の内部抵抗予測値Rpred_disと、図3の充電状態演算部301により推定されたSOCから得られるOCVの値であるOCV_SOCと、組電池110の特性から定められる上限電圧Vmaxおよび下限電圧Vminとを用いて、以下の式(9)、(10)により、許容充電電流Imax_chg2と許容放電電流Imax_dis2をそれぞれ演算する。
Imax_chg2=(Vmax-OCV_SOC)/Rpred_chg (9)
Imax_dis2=(Vmin-OCV_SOC)/Rpred_dis (10)
Imax_chg2=(Vmax-OCV_SOC)/Rpred_chg (9)
Imax_dis2=(Vmin-OCV_SOC)/Rpred_dis (10)
図11は、第二許容電流演算部704が行う演算処理のブロック線図である。図11において、第二許容電流演算部704は、式(9)の演算に対応する第二充電電流演算部1101と、式(10)の演算に対応する第二放電電流演算部1102とにより構成されている。第二充電電流演算部1101は、電池状態予測部702から入力される充電側の内部抵抗値Rpred_chgと、充電状態演算部301から入力されるSOCとを用いて、式(9)により、許容充電電流Imax_chg2を演算して出力する。第二放電電流演算部1102は、電池状態予測部702から入力される放電側の内部抵抗値Rpred_disと、充電状態演算部301から入力されるSOCとを用いて、式(10)により、許容放電電流Imax_dis2を演算して出力する。
前述したとおり、電池状態予測部702は、組電池110の充放電状態に関わらず、Rpred_chgおよびRpred_disを常時演算できる。そのため、第二許容電流演算部704も、組電池110の充放電状態に関わらず、許容充電電流Imax_chg2と許容放電電流Imax_dis2を常時演算できる。ただし、電池状態予測部702からの出力には、前述した通り、事前に抽出した組電池110の特性が現在の組電池110の特性と一致しない場合に、その差に応じた分の誤差が含まれる可能性がある。そのため、第二許容電流演算部704から出力されるImax_chg2およびImax_dis2においても、上記誤差分の許容電流誤差が含まれる可能性がある。
以上説明したように、第一許容電流演算部703は、許容電流を演算できるのが組電池110の充放電中に限られるという演算条件の制約がある一方で、第二許容電流演算部704は、こうした演算条件の制約がない。ただし、第二許容電流演算部704で演算される許容電流では、事前に抽出した電池特性と現在の電池特性との間に違いが生じた場合に、誤差が生じる。そこで、本実施形態において、許容電流演算部302は、第一許容電流演算部703で許容電流が演算できる条件を満たすとき、すなわち組電池110の充放電電流が所定の閾値以上であるときには、第一許容電流演算部703からの出力を、最終的な組電池110の許容電流として決定する。一方、第一許容電流演算部703で許容電流が演算できる条件を満たさないとき、すなわち組電池110の充放電電流が閾値未満であるときには、第二許容電流演算部704からの出力を、最終的な組電池110の許容電流として決定する。こうした処理を実現するために、許容電流演算部302は、許容充電電流決定部705および許容放電電流決定部706を備える。
許容充電電流決定部705は、第一許容電流演算部703により演算された許容充電電流Imax_chg1と、第二許容電流演算部704により演算された許容充電電流Imax_chg2とに基づいて、最終的な許容充電電流Imax_chgを決定し出力する。具体的には、内部抵抗検知部701から出力された充電フラグRflag_chgの値に基づいて、許容充電電流Imax_chg1または許容充電電流Imax_chg2のいずれかを選択し、許容充電電流Imax_chgとして出力する。
許容放電電流決定部706は、第一許容電流演算部703により演算された許容放電電流Imax_dis1と、第二許容電流演算部704により演算された許容放電電流Imax_dis2とに基づいて、最終的な許容放電電流Imax_disを決定し出力する。具体的には、内部抵抗検知部701から出力された放電フラグRflag_disの値に基づいて、許容放電電流Imax_dis1または許容放電電流Imax_dis2のいずれかを選択し、許容放電電流Imax_disとして出力する。
図12は、本発明の第1の実施形態において許容充電電流決定部705と許容放電電流決定部706がそれぞれ行う演算処理のブロック線図の一例を示す図である。図12において、スイッチを用いて実現された許容充電電流決定部705は、充電フラグRflag_chgが‘1’の場合は第一許容電流演算部703から出力された許容充電電流Imax_chg1を選択し、充電フラグRflag_chgが‘0’の場合は第二許容電流演算部704から出力された許容充電電流Imax_chg2を選択する。同様に、スイッチを用いて実現された許容放電電流決定部706は、放電フラグRflag_disが‘1’の場合は第一許容電流演算部703から出力された許容放電電流Imax_dis1を選択し、放電フラグRflag_disが‘0’の場合は第二許容電流演算部704から出力された許容放電電流Imax_dis2を選択する。
図13は、本発明の第1の実施形態において許容電流演算部302から最終的に出力される許容電流の様子を示す図である。ここでは、説明を単純化するために、充放電電流を図に示すように一定周期の正弦波状に変化させ、電流値が正の場合を充電、負の場合を放電と定義した。また、電流の向きが充電方向となった場合は直ちにRflag_chgが‘1’にセットされ、放電方向となった場合は直ちにRflag_disが‘1’にセットされることとした。
充放電電流が充電方向に流れている場合、内部抵抗検知部701は、充電側の内部抵抗値Rdet_chgを求めることができ、これを用いて第一許容電流演算部703は、許容充電電流Imax_chg1を求めることができる。一方、電池状態予測部702で予測される充電側の内部抵抗値Rpred_chgは、事前に記憶された電池特性から推定されたものであるため、これを用いて第二許容電流演算部704で演算される許容充電電流Imax_chg2は、Imax_chg1と比較して誤差が大きい。そこで、許容充電電流決定部705は、充放電電流の向きが充電方向となった場合は、第一許容電流演算部703からのImax_chg1を最終的な許容充電電流に決定し、許容充電電流Imax_chgとして出力する。
またこの場合、内部抵抗検知部701が放電側の内部抵抗値Rdet_disを求めることができないため、第一許容電流演算部703は、許容放電電流Imax_dis1を求めることができない。一方、第二許容電流演算部704は、電池状態予測部702で予測された放電側の内部抵抗値Rpred_disを用いて、許容放電電流Imax_dis2を求めることができる。そこで、許容放電電流決定部706は、充放電電流の向きが充電方向となった場合は、第二許容電流演算部704からのImax_dis2を最終的な許容放電電流に決定し、許容放電電流Imax_disとして出力する。
充放電電流が放電方向に流れている場合、内部抵抗検知部701は、放電側の内部抵抗値Rdet_disを求めることができ、これを用いて第一許容電流演算部703は、許容放電電流Imax_dis1を求めることができる。一方、電池状態予測部702で予測される放電側の内部抵抗値Rpred_disは、事前に記憶された電池特性から推定されたものであるため、これを用いて第二許容電流演算部704で演算される許容放電電流Imax_dis2は、Imax_dis1と比較して誤差が大きい。そこで、許容放電電流決定部706は、充放電電流の向きが放電方向となった場合は、第一許容電流演算部703からのImax_dis1を最終的な許容放電電流に決定し、許容放電電流Imax_disとして出力する。
またこの場合、内部抵抗検知部701が充電側の内部抵抗値Rdet_chgを求めることができないため、第一許容電流演算部703は、許容充電電流Imax_chg1を求めることができない。一方、第二許容電流演算部704は、電池状態予測部702で予測された充電側の内部抵抗値Rpred_chgを用いて、許容充電電流Imax_chg2を求めることができる。そこで、許容充電電流決定部705は、充放電電流の向きが放電方向となった場合は、第二許容電流演算部704からのImax_chg2を最終的な許容充電電流に決定し、許容充電電流Imax_chgとして出力する。
上記を換言すると、許容充電電流決定部705は、組電池110の充電が開始される前の放電中には、第二許容電流演算部704で求められた許容充電電流Imax_chg2を、最終的な組電池110の許容充電電流Imax_chgとして決定し出力する。そして、組電池110の充電が開始された後には、許容充電電流Imax_chgを、第二許容電流演算部704で求められた許容充電電流Imax_chg2から、第一許容電流演算部703で求められた、より誤差の小さな許容充電電流Imax_chg1に切り替える。一方、許容放電電流決定部706は、組電池110の放電が開始される前の充電中には、第二許容電流演算部704で求められた許容放電電流Imax_dis2を、最終的な組電池110の許容放電電流Imax_disとして決定し出力する。そして、組電池110の放電が開始された後には、許容放電電流Imax_disを、第二許容電流演算部704で求められた許容放電電流Imax_dis2から、第一許容電流演算部703で求められた、より誤差の小さな許容放電電流Imax_dis1に切り替える。
以上より、図7の許容電流演算部302のブロック線図を用いて、本発明における許容電流演算の処理内容について説明した。図7は一例であり、以下に述べるのは、他の許容電流演算部302によって本発明を実現した場合の処理内容である。
図14に、図7とは異なる許容電流演算部302のブロック線図を示す。図7の内部抵抗検知部701は、検知した内部抵抗値Rdet_chgとRdet_dis、内部抵抗値を検知できたかを示すRflag_chgとRflag_disを出力した。図14の内部抵抗検知部701は、検知した直流抵抗値ROdet_chgとROdet_dis、検知した分極電圧VPdet、これら電池情報を検知できたかを示すRflag_chgとRflag_disが出力される。また、図7の電池状態予測部702の出力は予測した内部抵抗値Rpred_chgとRpred_disであったが、図14では予測した直流抵抗値ROpred_chgとROpred_dis、予測した分極電圧VPpredが出力される。
図14における内部抵抗検知部701の処理内容について説明する。内部抵抗検知部701は、電圧検知部140により計測された電圧と、電流検知部130により計測された電流とを用いて、組電池110の現在の直流抵抗値を検知する。具体的には、以下の式(11)を用いて、直流抵抗値を求める。なお、式(11)において、tは時間、V(t)は時刻tで電圧検知部140により計測された電圧、I(t)は時刻tで電流検知部130により計測された電流の値を表している。
ROdet=(V(t)-V(t-1))/(I(t)-I(t-1)) (11)
式(11)で得られる直流抵抗は、電圧検知部140と電流検知部130の測定性能や、式(11)を実行した条件によって、値が不安定になる場合がある。そこで、必要に応じて、式(11)を複数回実行して得られたROdetを平均化した後に以降の演算に活用すると良い。
ROdet=(V(t)-V(t-1))/(I(t)-I(t-1)) (11)
式(11)で得られる直流抵抗は、電圧検知部140と電流検知部130の測定性能や、式(11)を実行した条件によって、値が不安定になる場合がある。そこで、必要に応じて、式(11)を複数回実行して得られたROdetを平均化した後に以降の演算に活用すると良い。
式(11)におけるI(t)とI(t-1)が共に充電側の電流値の場合に得られたROdetは、充電側の直流抵抗値とみなせる。そこで、この条件で得られたROdetを、充電側の直流抵抗値であるROdet_chgに代入すると共に、組電池110の充電時の直流抵抗値を検知できたか否かを示すための充電フラグRflag_chgを‘1’にセットする。一方、放電時の直流抵抗値を表すROdet_disには、所定の無効値や予め定めた直流抵抗値を代入して、組電池110の放電時の直流抵抗値を検知できたか否かを示すための放電フラグRflag_disを‘0’にセットする。なお、組電池110の直流抵抗は短い時間で大きく変化するものではないため、放電時の直流抵抗値ROdet_disが演算できない場合は前回求めた放電時の直流抵抗値ROdet_disを活用することも可能である。そして、所定時間以上、放電時の直流抵抗値ROdet_disが演算できない場合にRflag_disを‘0’にセットする。
反対に、式(11)におけるI(t)とI(t-1)が共に放電側の電流値の場合、内部抵抗検知部701は、得られたROdetの値をROdet_disに代入して、Rflag_disを‘1’にセットする。一方、ROdet_chgには、所定の無効値や予め定めた直流抵抗値を代入して、Rflag_chgを‘0’にセットする。これも先ほど述べたことと同様に、組電池110の直流抵抗は短い時間で大きく変化するものではないため、充電時の直流抵抗値ROdet_chgが演算できない場合は前回求めた充電時の直流抵抗値ROdet_chgを活用することも可能である。そして、所定時間以上、充電時の直流抵抗値ROdet_chgが演算できない場合にRflag_chgを‘0’にセットする。
なお、I(t)とI(t-1)が充電側と放電側のペアとなった場合、または、I(t)とI(t-1)の差が閾値未満であり、直流抵抗を検知するのが困難な場合は、内部抵抗検知部701は、充電時の直流抵抗値ROdet_chgと、放電時の直流抵抗値ROdet_disのいずれについても、演算することができない。この場合、内部抵抗検知部701は、所定の無効値や予め定めた直流抵抗値をROdet_chgとROdet_disにそれぞれ代入し、Rflag_chgとRflag_disの両方を‘0’にセットする。もしくは、充電時の直流抵抗値ROdet_chgと放電時の直流抵抗値ROdet_disが演算できない場合は前回求めた充電時の直流抵抗値ROdet_chgと放電時の直流抵抗値ROdet_disを活用し、所定時間以上、充電時の直流抵抗値ROdet_chgと放電時の直流抵抗値ROdet_disが演算できない場合にRflag_chgとRflag_disを‘0’にセットする。
前述した処理によって、内部抵抗検知部701は組電池110の直流抵抗値を検知する。これに加え、ここでの内部抵抗検知部701は組電池110の分極電圧を検知するものとした(VPdet)。式(12)に、分極電圧の検知方法を示す。
VPdet=CCV-OCV_SOC- I×ROdet (12)
ここで、CCVは電圧検知部140が計測した充放電中の電圧値、OCV_SOCは図5に示したSOCテーブル501によりSOCの推定結果から得られるOCVの値、Iは電流検知部130で計測された電流値、ROdetは内部抵抗検知部701が検知した組電池110の充電側もしくは放電側で検知された直流抵抗である。VPdetの検知結果は、直流抵抗値ROdet_chgとROdet_dis、電池状態を検知できたか否かを示すRflag_chgとRflag_disと共に出力され、後述する許容電流の演算に活用される。
VPdet=CCV-OCV_SOC- I×ROdet (12)
ここで、CCVは電圧検知部140が計測した充放電中の電圧値、OCV_SOCは図5に示したSOCテーブル501によりSOCの推定結果から得られるOCVの値、Iは電流検知部130で計測された電流値、ROdetは内部抵抗検知部701が検知した組電池110の充電側もしくは放電側で検知された直流抵抗である。VPdetの検知結果は、直流抵抗値ROdet_chgとROdet_dis、電池状態を検知できたか否かを示すRflag_chgとRflag_disと共に出力され、後述する許容電流の演算に活用される。
次に、図14における電池状態予測部702について説明する。前述したとおり、内部抵抗検知部701は所定条件を満たした場合にのみ、直流抵抗値等の電池状態を検知できる。一方、ここで述べる電池状態予測部702は、事前に抽出した組電池110の特性が現在の組電池110の特性と不一致である場合には、その差に応じた分だけ、電池状態予測部702からの出力には誤差が含まれるものの、常に電池状態を外部に出力することが可能である。
電池状態予測部702は、電圧検知部140が測定した電圧(CCV)を用いることなしに、組電池110の状態を予測する機能を有する。この電池状態予測部702は、現在の組電池110の充電時における直流抵抗予測値を表すROpred_chgと、放電時における直流抵抗予測値を表すROpred_dis、分極電圧予測値を表すVPpredを、電池状態の予測結果を表す電池特性情報として出力する。
電池状態予測部702において、ROpred_chgとROpred_disは、図3の充電状態演算部301により推定されたSOCや、図2の温度検知部125から受け取った温度から推定することができる。これは、組電池110または単電池111を予め充放電試験することで抵抗特性を抽出しておき、その結果をSOCと温度などに応じた抵抗特性テーブルとして記憶部180に記憶させておくことで実現できる。また、VPpredは、式(6)の説明で述べたとおり、分極抵抗403とキャパシタンス成分404を並列接続して生じる分極電圧を、計算により予測することが可能である。
図14における第一許容電流演算部703は、SOCと、ROdet_chgとROdet_dis、VPdetを入力に用いて許容電流を演算する。具体的には、電圧検知部140による電圧計測結果を基に内部抵抗検知部701で検知された充電側の直流抵抗値ROdet_chgおよび放電側の直流抵抗値ROdet_disと、図3の充電状態演算部301により推定されたSOCから得られるOCVの値であるOCV_SOCと、式(12)で検知した分極電圧であるVPdetと、組電池110の特性から定められる上限電圧Vmaxおよび下限電圧Vminとを用いて、以下の式(13)、(14)により、許容充電電流Imax_chg1と許容放電電流Imax_dis1をそれぞれ演算する。図15は、この第一許容電流演算部703が行う演算処理のブロック線図である。式(7)(8)では分極電圧の影響をRdet_chgとRdet_disに含めて許容電流を演算したが、ここでは、分極電圧を抵抗値に換算せずに許容電流を求めている。
Imax_chg1={Vmax-(OCV_SOC+VPdet)}/ROdet_chg (13)
Imax_dis1={Vmin-(OCV_SOC+VPdet)}/ROdet_dis (14)
Imax_chg1={Vmax-(OCV_SOC+VPdet)}/ROdet_chg (13)
Imax_dis1={Vmin-(OCV_SOC+VPdet)}/ROdet_dis (14)
第二許容電流演算部704は、電池状態予測部702からの出力と、内部抵抗検知部701からの出力であるVPdet等を受信して組電池110の許容電流を求める。具体的には、予測された充電側の直流抵抗予測値ROpred_chg、放電側の直流抵抗予測値ROpred_disと、図3の充電状態演算部301により推定されたSOCから得られるOCVの値であるOCV_SOCと、計算で予測した分極電圧予測値VPpredまたは式(12)で検知した分極電圧VPdetと、組電池110の特性から定められる上限電圧Vmaxおよび下限電圧Vminとを用いて、以下の式(15)、(16)により、許容充電電流Imax_chg2と許容放電電流Imax_dis2をそれぞれ演算する。図16は、この第二許容電流演算部704が行う演算処理のブロック線図である。VPpredに加えて、VPdetも入力として用いる理由は、分極電圧は充電側で検知しても放電側で利用でき、放電側で検知しても充電側で利用できる共通パラメータであるためである。内部抵抗検知部701で検知されたVPdetは第二許容電流演算部704でも活用でき、内部抵抗検知部701でVPdetが検知される前はVPpredを活用し、VPdetが検知された場合は精度を優先してVPdetを採用する処理を実現できる。なお、許容電流の演算処理をシンプルにする目的で、第二許容電流演算部704は電池状態予測部702からの出力のみを扱う、すなわち、分極電圧は予測値であるVPpredのみとする処理内容を採用することも可能である。
式(15)(16)、図16の分極電圧VPは、分極電圧予測値VPpredまたは式(12)で検知した分極電圧VPdetが代入される。VPdetが検知されていない場合は分極電圧予測値VPpredがVPに代入されて活用され、内部抵抗検知部701で有効な分極電圧VPdetが検知された場合はVPdetがVPに代入されて活用され、Imax_chg2とImax_dis2が求められる。
Imax_chg2={Vmax-(OCV_SOC+VP)}/ROpred_chg (15)
Imax_dis2={Vmin-(OCV_SOC+VP)}/ROpred_dis (16)
Imax_chg2={Vmax-(OCV_SOC+VP)}/ROpred_chg (15)
Imax_dis2={Vmin-(OCV_SOC+VP)}/ROpred_dis (16)
図14における許容充電電流決定部705と許容放電電流決定部706は、図7の機能と同様である。すなわち、許容充電電流決定部705は、内部抵抗検知部701から出力された充電フラグRflag_chgの値に基づいて、許容充電電流Imax_chg1または許容充電電流Imax_chg2のいずれかを選択し、許容充電電流Imax_chgとして出力する。許容放電電流決定部706は、内部抵抗検知部701から出力された放電フラグRflag_disの値に基づいて、許容放電電流Imax_dis1または許容放電電流Imax_dis2のいずれかを選択し、許容放電電流Imax_disとして出力する。これにより、図7を用いて説明したのと同様に、許容電流を高精度に演算することが可能となる。
以上説明した本発明の第1の実施形態によれば、以下の作用効果を奏する。
(1)組電池制御部150において、許容電流演算部302は、第一許容電流演算部703と、第二許容電流演算部704と、許容充電電流決定部705と、許容放電電流決定部706とを備える。第一許容電流演算部703は、電圧検知部140により検知された組電池110の電圧に基づく組電池110の許容電流として、許容充電電流Imax_chg1および許容放電電流Imax_dis1を求める。第二許容電流演算部704は、組電池110の電圧を用いずに、組電池110の許容電流として、許容充電電流Imax_chg2および許容放電電流Imax_dis2を求める。許容充電電流決定部705は、許容充電電流Imax_chg1および許容充電電流Imax_chg2の少なくとも一つに基づいて、組電池110の状態に応じた組電池110の許容充電電流Imax_chgを決定し、許容放電電流決定部706は、許容放電電流Imax_dis1および許容放電電流Imax_dis2の少なくとも一つに基づいて、組電池110の状態に応じた組電池110の許容放電電流Imax_disを決定する。このようにしたので、組電池110の許容電流を高精度に検知することができる。
(2)許容充電電流決定部705は、許容充電電流Imax_chg1を求められる状態に組電池110がある状態にあるときには、許容充電電流Imax_chg1を組電池110の許容充電電流Imax_chgとして決定し、許容充電電流Imax_chg1を求められない状態に組電池110があるときには、許容充電電流Imax_chg2を組電池110の許容充電電流Imax_chgとして決定する。具体的には、組電池110の充電電流が所定の閾値以上であるときには、許容充電電流Imax_chg1を求められる状態に組電池110があると判断して、許容充電電流Imax_chg1を組電池110の許容充電電流Imax_chgとして決定し、組電池110の充電電流が閾値未満であるときには、許容充電電流Imax_chg1を求められない状態に組電池110があると判断して、許容充電電流Imax_chg2を組電池110の許容充電電流Imax_chgとして決定する。また、許容放電電流決定部706は、許容放電電流Imax_dis1を求められる状態に組電池110がある状態にあるときには、許容放電電流Imax_dis1を組電池110の許容放電電流Imax_disとして決定し、許容放電電流Imax_dis1を求められない状態に組電池110があるときには、許容放電電流Imax_dis2を組電池110の許容放電電流Imax_disとして決定する。具体的には、組電池110の放電電流が所定の閾値以上であるときには、許容放電電流Imax_dis1を求められる状態に組電池110があると判断して、許容放電電流Imax_dis1を組電池110の許容放電電流Imax_disとして決定し、組電池110の放電電流が閾値未満であるときには、許容放電電流Imax_dis1を求められない状態に組電池110があると判断して、許容放電電流Imax_dis2を組電池110の許容放電電流Imax_disとして決定する。このようにしたので、組電池110の状態に応じて、最適な許容電流を決定することができる。
(3)許容充電電流決定部705は、組電池110の充電が開始される前には、許容充電電流Imax_chg2を組電池110の許容充電電流Imax_chgとして決定し、組電池110の充電が開始された後には、組電池110の許容充電電流Imax_chgを、許容充電電流Imax_chg2から許容充電電流Imax_chg1に切り替える。また、許容放電電流決定部706は、組電池110の放電が開始される前には、許容放電電流Imax_dis2を組電池110の許容放電電流Imax_disとして決定し、組電池110の放電が開始された後には、組電池110の許容放電電流Imax_disを、許容放電電流Imax_dis2から許容放電電流Imax_dis1に切り替える。このようにしたので、組電池110の充放電の開始に応じて、より誤差の小さな許容電流を求めることができる。
(4)許容充電電流決定部705および許容放電電流決定部706は、組電池110が充電されているときには、充電側については許容充電電流Imax_chg1を組電池110の許容充電電流Imax_chgとして決定すると共に、放電側については許容放電電流Imax_dis2を組電池110の許容放電電流Imax_disとして決定する。また、組電池110が放電されているときには、充電側については許容充電電流Imax_chg2を組電池110の許容充電電流Imax_chgとして決定すると共に、放電側については許容放電電流Imax_dis1を組電池110の許容放電電流Imax_disとして決定する。そして、組電池110の充放電の切り替わりに応じて、充電側と放電側のそれぞれについて、組電池110の許容充電電流Imax_chgおよび許容放電電流Imax_disを、許容充電電流Imax_chg1または許容放電電流Imax_dis1と、許容充電電流Imax_chg2または許容放電電流Imax_dis2との間で切り替える。このようにしたので、組電池110の充放電の切り替わりに応じて、適切な許容電流を選択することができる。
<第2の実施形態>
次に本発明の第2の実施形態について説明する。本実施形態では、前述の内部抵抗検知部701、許容充電電流決定部705および許容放電電流決定部706の処理内容にそれぞれ変更を加えた例について説明する。その他の機能は、第1の実施形態で説明したのと同じである。
次に本発明の第2の実施形態について説明する。本実施形態では、前述の内部抵抗検知部701、許容充電電流決定部705および許容放電電流決定部706の処理内容にそれぞれ変更を加えた例について説明する。その他の機能は、第1の実施形態で説明したのと同じである。
図17は、本発明の第2の実施形態において許容充電電流決定部705と許容放電電流決定部706がそれぞれ行う演算処理のブロック線図の一例を示す図である。図17において、許容充電電流決定部705と許容放電電流決定部706には、重み決定部1701A、1701Bがそれぞれ設けられている。この重み決定部1701A、1701Bは、充電フラグRflag_chgまたは放電フラグRflag_disが変化した場合に、0と1の間で連続的に変化する重み係数Wchg、Wdisをそれぞれ出力する機能を有する。具体的には、充電フラグRflag_chgが‘0’から‘1’に変化すると、重み決定部1701Aは、重み係数Wchgを0から1まで所定の傾きで変化させ、反対に充電フラグRflag_chgが‘1’から‘0’に変化すると、重み決定部1701Aは、重み係数Wchgを1から0まで所定の傾きで変化させる。同様に、放電フラグRflag_disが‘0’から‘1’に変化すると、重み決定部1701Bは、重み係数Wdisを0から1まで所定の傾きで変化させ、反対に放電フラグRflag_disが‘1’から‘0’に変化すると、重み決定部1701Bは、重み係数Wdisを1から0まで所定の傾きで変化させる。
許容充電電流決定部705と許容放電電流決定部706は、上記のようにして出力される重み係数Wchg、Wdisを用いて、以下の式(17)、(18)により、第一許容電流演算部703からの許容充電電流Imax_chg1および許容放電電流Imax_dis1と、第二許容電流演算部704からの許容充電電流Imax_chg2および許容放電電流Imax_dis2に対してそれぞれ重み付けを行い、最終的な組電池110の許容電流を計算する。
Imax_chg=Wchg×Imax_chg1+(1-Wchg)×Imax_chg2 (17)
Imax_dis=Wdis×Imax_dis1+(1-Wdis)×Imax_dis2 (18)
Imax_chg=Wchg×Imax_chg1+(1-Wchg)×Imax_chg2 (17)
Imax_dis=Wdis×Imax_dis1+(1-Wdis)×Imax_dis2 (18)
この重み決定部1701Aと1701Bの追加により、充電と放電が切り替った際の許容電流の変化をなだらかにすることができる。図18は、本発明の第2の実施形態において許容電流演算部302から最終的に出力される許容電流の様子を示す図である。ここでは図13と同様に、充放電電流を図に示すように一定周期の正弦波状に変化させ、電流値が正の場合を充電、負の場合を放電と定義した。また、電流の向きが充電方向となった場合は直ちにRflag_chgが‘1’にセットされ、放電方向となった場合は直ちにRflag_disが‘1’にセットされることとした。
充放電電流が充電方向に流れている場合、許容充電電流決定部705と許容放電電流決定部706は、重み係数Wchgを1に、重み係数Wdisを0にそれぞれ設定する。これにより、充電側については、第一許容電流演算部703からの許容充電電流Imax_chg1に対する重み付けを相対的に大きくし、放電側については、第二許容電流演算部704からの許容放電電流Imax_dis2に対する重み付けを相対的に大きくする。
充放電電流が充電方向から放電方向に切り替えられると、許容充電電流決定部705は、重み係数Wchgを1から0に次第に変化させる。これにより、許容充電電流Imax_chg1に対する重み付けを次第に小さくして、許容充電電流Imax_chg2に対する重み付けを次第に大きくする。その結果、許容充電電流決定部705から出力される許容充電電流Imax_chgは、図に示すように、Imax_chg1からImax_chg2へと次第に変化する。一方、許容放電電流決定部706は、重み係数Wdisを0から1に次第に変化させる。これにより、許容放電電流Imax_dis1に対する重み付けを次第に大きくして、許容放電電流Imax_dis2に対する重み付けを次第に小さくする。その結果、許容放電電流決定部706から出力される許容放電電流Imax_disは、図に示すように、Imax_dis2からImax_dis1へと次第に変化する。
また、充放電電流が放電方向に流れている場合、許容充電電流決定部705と許容放電電流決定部706は、重み係数Wchgを0に、重み係数Wdisを1にそれぞれ設定する。これにより、充電側については、第二許容電流演算部704からの許容充電電流Imax_chg2に対する重み付けを相対的に大きくし、放電側については、第一許容電流演算部703からの許容放電電流Imax_dis1に対する重み付けを相対的に大きくする。
充放電電流が放電方向から充電方向に切り替えられると、許容充電電流決定部705は、重み係数Wchgを0から1に次第に変化させる。これにより、許容充電電流Imax_chg1に対する重み付けを次第に大きくして、許容充電電流Imax_chg2に対する重み付けを次第に小さくする。その結果、許容充電電流決定部705から出力される許容充電電流Imax_chgは、図に示すように、Imax_chg2からImax_chg1へと次第に変化する。一方、許容放電電流決定部706は、重み係数Wdisを1から0に次第に変化させる。これにより、許容放電電流Imax_dis1に対する重み付けを次第に小さくして、許容放電電流Imax_dis2に対する重み付けを次第に大きくする。その結果、許容放電電流決定部706から出力される許容放電電流Imax_disは、図に示すように、Imax_dis1からImax_dis2へと次第に変化する。
なお、前述のように、内部抵抗検知部701において、充放電電流が閾値未満のときに予め定めた内部抵抗値をRdet_chgやRdet_disに代入する場合、これらを用いて第一許容電流演算部703が許容充電電流Imax_chg1や許容放電電流Imax_dis1を演算すると、演算結果に大きな誤差が含まれる可能性がある。このとき代入される内部抵抗値としては、組電池110の特性に応じて想定される内部抵抗値の最大値、最小値、平均値などが考えられるが、いずれの場合でも、実際の値との差が大きいほど、第一許容電流演算部703の演算結果に含まれる誤差も大きなものとなる。したがって、本実施形態では、最後に演算した内部抵抗値を内部抵抗検知部701内に保持しておき、内部抵抗検知部701が内部抵抗値の演算を実行できないときには、保持した内部抵抗値を出力することが好ましい。このようにすれば、充放電の切り替え時に、許容充電電流決定部705と許容放電電流決定部706からそれぞれ出力される許容充電電流Imax_chgと許容放電電流Imax_disが急激に変動するのを防止することができる。
以上説明した本発明の第2の実施形態によれば、以下の作用効果を奏する。
(1)許容充電電流決定部705は、許容充電電流Imax_chg1と許容充電電流Imax_chg2に対する重み係数Wchgを決定し、この重み係数Wchgに基づいて許容充電電流Imax_chg1と許容充電電流Imax_chg2をそれぞれ重み付けして合計することにより、組電池110の許容充電電流Imax_chgを決定する。また、許容放電電流決定部706は、許容放電電流Imax_dis1と許容放電電流Imax_dis2に対する重み係数Wdisを決定し、この重み係数Wdisに基づいて許容放電電流Imax_dis1と許容放電電流Imax_dis2をそれぞれ重み付けして合計することにより、組電池110の許容放電電流Imax_disを決定する。このようにしたので、別々の方法で求められた二種類の許容電流から、適切な許容電流を求めることができる。
(2)許容充電電流決定部705および許容放電電流決定部706は、組電池110の充電または放電中に、重み係数Wchg、Wdisをそれぞれ変化させる。これにより、許容充電電流決定部705は、組電池110の充電が開始される前には、許容充電電流Imax_chg2に対する重み付けを相対的に大きくし、組電池110の充電が開始された後には、許容充電電流Imax_chg1に対する重み付けを次第に大きくして、許容充電電流Imax_chg2に対する重み付けを次第に小さくする。また、許容放電電流決定部706は、組電池110の放電が開始される前には、許容放電電流Imax_dis2に対する重み付けを相対的に大きくし、組電池110の放電が開始された後には、許容放電電流Imax_dis1に対する重み付けを次第に大きくして、許容放電電流Imax_dis2に対する重み付けを次第に小さくする。このようにしたので、組電池110の充放電の切り替わり時に、許容電流をスムーズに変化させることができる。
<第3の実施形態>
次に本発明の第3の実施形態について説明する。本実施形態では、前述の第一許容電流演算部703、第二許容電流演算部704、許容充電電流決定部705および許容放電電流決定部706の処理内容にそれぞれ変更を加えた例について説明する。その他の機能は、第1の実施形態で説明したのと同じである。
次に本発明の第3の実施形態について説明する。本実施形態では、前述の第一許容電流演算部703、第二許容電流演算部704、許容充電電流決定部705および許容放電電流決定部706の処理内容にそれぞれ変更を加えた例について説明する。その他の機能は、第1の実施形態で説明したのと同じである。
本実施形態において、許容充電電流決定部705と許容放電電流決定部706がそれぞれ行う演算処理のブロック線図は、図17と同じである。すなわち、許容充電電流決定部705と許容放電電流決定部706には、重み決定部1701A、1701Bがそれぞれ設けられている。
前述の第2の実施形態では、重み決定部1701A、1701Bは、充電フラグRflag_chgと放電フラグRflag_disをそれぞれ入力し、これらの値に基づいて、0と1の間で連続的に変化する重み係数Wchg、Wdisをそれぞれ出力するものとして説明した。これに対して、本実施形態では、第一許容電流演算部703と第二許容電流演算部704がそれぞれの許容電流の誤差を演算し、これを用いて重み決定部1701A、1701Bが重み係数Wchg、Wdisをそれぞれ決定する例を説明する。
本実施形態において、第一許容電流演算部703は、前述の許容充電電流Imax_chg1と許容放電電流Imax_dis1の演算に加えて、さらにこれらの誤差をそれぞれ表す許容充電電流誤差ΔImax_chg1と許容放電電流誤差ΔImax_dis1の演算を行う。同様に、第二許容電流演算部704は、前述の許容充電電流Imax_chg2と許容放電電流Imax_dis2の演算に加えて、さらにこれらの誤差を表す許容充電電流誤差ΔImax_chg2と許容放電電流誤差ΔImax_dis2の演算を行う。第一許容電流演算部703で求められた許容充電電流誤差ΔImax_chg1と、第二許容電流演算部704で求められた許容充電電流誤差ΔImax_chg2は、許容充電電流決定部705において、重み決定部1701Aに入力される。第一許容電流演算部703で求められた許容放電電流誤差ΔImax_dis1と、第二許容電流演算部704で求められた許容放電電流誤差ΔImax_dis2は、許容放電電流決定部706において、重み決定部1701Bに入力される。なお、許容充電電流誤差ΔImax_chg1と許容放電電流誤差ΔImax_dis1や、許容充電電流誤差ΔImax_chg2と許容放電電流誤差ΔImax_dis2は、電流検知部130や電圧検知部140、温度検知部125の測定誤差や、図4の等価回路と実際の電池電圧との違いを予め把握し、これらを入力として用いることで演算することが可能である。
重み決定部1701A、1701Bは、入力された上記の各許容電流誤差を用いて、以下の式(19)、(20)により、重み係数Wchg、Wdisをそれぞれ決定する。
Wchg=ΔImax_chg22/(ΔImax_chg12+ΔImax_chg22) (19)
Wdis=ΔImax_dis22/(ΔImax_dis12+ΔImax_dis22) (20)
Wchg=ΔImax_chg22/(ΔImax_chg12+ΔImax_chg22) (19)
Wdis=ΔImax_dis22/(ΔImax_dis12+ΔImax_dis22) (20)
上記の重み係数Wchg、Wdisを用いることで、許容充電電流決定部705と許容放電電流決定部706は、前述の式(17)、(18)により、最終的な組電池110の許容電流をそれぞれ計算することができる。なお、重み決定部1701A、1701Bにおいて、第一許容電流演算部703の演算結果に含まれる誤差のみに応じて重み係数Wchg、Wdisをそれぞれ決定することで、処理を簡略化してもよい。すなわち、許容充電電流決定部705および許容放電電流決定部706は、第一許容電流演算部703で求められた許容充電電流誤差ΔImax_chg1および許容放電電流誤差ΔImax_dis1に基づいて、重み係数Wchg、Wdisをそれぞれ決定する。
なお、前述のように、内部抵抗検知部701において、充放電電流が閾値未満のときに予め定めた内部抵抗値をRdet_chgやRdet_disに代入する場合、これらを用いて第一許容電流演算部703が許容充電電流Imax_chg1や許容放電電流Imax_dis1を演算すると、演算結果に大きな誤差が含まれる可能性がある。したがって、このような場合は、第一許容電流演算部703から出力される許容充電電流誤差ΔImax_chg1や許容放電電流誤差ΔImax_dis1の値を、想定される範囲内で最大の値とすることが好ましい。このようにすれば、大きな誤差を含む許容充電電流Imax_chg1や許容放電電流Imax_dis1に対する重み付けを最小化する一方で、許容充電電流Imax_chg2や許容放電電流Imax_dis2に対する重み付けを最大化して、適切な許容電流を求めることができる。
以上説明した本発明の第3の実施形態によれば、第一許容電流演算部703は、許容充電電流Imax_chg1の誤差を表す許容充電電流誤差ΔImax_chg1と、許容放電電流Imax_dis1の誤差を表す許容放電電流誤差ΔImax_dis1とを求める。また、第二許容電流演算部704は、許容充電電流Imax_chg2の誤差を表す許容充電電流誤差ΔImax_chg2と、許容放電電流Imax_dis2の誤差を表す許容放電電流誤差ΔImax_dis2とを求める。許容充電電流決定部705および許容放電電流決定部706は、これらの誤差の少なくとも一つに基づいて、重み係数Wchg、Wdisをそれぞれ決定する。このようにしたので、別々の方法で求められた二種類の許容電流にそれぞれ含まれる誤差の大きさに応じて、適切な許容電流を求めることができる。
<第4の実施形態>
次に本発明の第4の実施形態について説明する。本実施形態では、組電池110の内部抵抗の変化を考慮して、許容電流を補正する例について説明する。
次に本発明の第4の実施形態について説明する。本実施形態では、組電池110の内部抵抗の変化を考慮して、許容電流を補正する例について説明する。
組電池110は、充放電を繰り返すに従って劣化が進行すると、それに応じて内部抵抗が増加し、満充電容量が低下するなどの特性変化が生じる。電池状態予測部702は、予め充放電試験して得られた電池特性に従って組電池110の状態を予測するため、上記のような電池特性の変化が生じると、電池状態の予測結果に誤差が生じる。そのため、電池状態予測部702の予測結果を用いて第二許容電流演算部704が演算する許容充電電流Imax_chg2や許容放電電流Imax_dis2にも、この誤差が含まれるようになる。
図19は、本発明の第4の実施形態における補正を行わないで、第二許容電流演算部704の演算精度が低下した場合に、許容電流演算部302から最終的に出力される許容電流の様子を示す図である。第二許容電流演算部704の演算精度が低下して、上記の電池状態の予測結果に対する誤差が大きくなると、図19に示すように、第一許容電流演算部703から出力される許容充電電流Imax_chg1や許容放電電流Imax_dis1と、第二許容電流演算部704から出力される許容充電電流Imax_chg2や許容放電電流Imax_dis2との間の差が拡大する。したがって、組電池110の充放電が切り替わったときには、許容電流演算部302から出力される許容電流に大きな変動が生じることとなる。
そこで、本実施形態では、許容電流演算部302に、第二許容電流演算部704の演算結果を補正するための機能を追加するようにした。その具体的な内容について、以下に詳述する。
図20は、本発明の第4の実施形態における許容電流演算部302のブロック線図の一例である。第1の実施形態で説明した図7のブロック線図と比較して、図20では、補正部2001A、2001Bがさらに加えられている。補正部2001Aは、第一許容電流演算部703からの許容充電電流Imax_chg1と、第二許容電流演算部704からの許容充電電流Imax_chg2とを比較し、その比較結果に基づいて、許容充電電流Imax_chg2を補正する。補正部2001Bは、第一許容電流演算部703からの許容放電電流Imax_dis1と、第二許容電流演算部704からの許容放電電流Imax_dis2とを比較し、その比較結果に基づいて、許容放電電流Imax_dis2を補正する。
具体的には、補正部2001Aでは、許容充電電流Imax_chg1と許容充電電流Imax_chg2の差を求め、この差に基づいて決定される補正係数を用いて、許容充電電流Imax_chg2を補正する。または、許容充電電流Imax_chg1と許容充電電流Imax_chg2の比率を求め、この比率に基づいて決定される補正係数を用いて、許容充電電流Imax_chg2を補正する。そして、補正結果を補正後の許容充電電流Imax_chg2’として出力する。同様に、補正部2001Bでは、許容放電電流Imax_dis1と許容放電電流Imax_dis2の差を求め、この差に基づいて決定される補正係数を用いて、許容放電電流Imax_dis2を補正する。または、許容放電電流Imax_dis1と許容放電電流Imax_dis2の比率を求め、この比率に基づいて決定される補正係数を用いて、許容放電電流Imax_dis2を補正する。そして、補正結果を補正後の許容放電電流Imax_dis2’として出力する。なお、これらの差や比率の平均値から補正係数を決定することで、充電側と放電側で共通の補正係数としてもよい。また、差や比率が所定の範囲内の場合は補正を行わずに、所定の範囲外となったときに補正を行ってもよい。さらに、組電池110の充放電時間や、電池状態予測部702が出力できるVPpred等の分極電圧に応じて補正係数を設けることも可能である。いずれの場合でも、補正部2001Aおよび2001Bにおいて、許容充電電流Imax_chg1と許容充電電流Imax_chg2の差または比率や、許容放電電流Imax_dis1と許容放電電流Imax_dis2の差または比率に応じた複数の補正係数を予め保持させておけば、この中から選択した補正係数を用いて、許容充電電流Imax_chg2と許容放電電流Imax_dis2をそれぞれ補正することができる。
図21は、本発明の第4の実施形態における許容電流演算部302のブロック線図の他の一例である。第1の実施形態で説明した図7のブロック線図と比較して、図21では、補正部2101A、2101Bがさらに加えられている。補正部2101Aは、第一許容電流演算部703からの許容充電電流Imax_chg1と、第二許容電流演算部704からの許容充電電流Imax_chg2とを比較し、その比較結果に基づいて、電池状態予測部702から電池状態の予測結果として出力される電池特性情報のうち、第二許容電流演算部704が許容充電電流Imax_chg2を求めるために用いるものを補正する。補正部2101Bは、第一許容電流演算部703からの許容放電電流Imax_dis1と、第二許容電流演算部704からの許容放電電流Imax_dis2とを比較し、その比較結果に基づいて、電池状態予測部702から電池状態の予測結果として出力される電池特性情報のうち、第二許容電流演算部704が許容放電電流Imax_dis2を求めるために用いるものを補正する。
具体的には、補正部2101Aでは、許容充電電流Imax_chg1と許容充電電流Imax_chg2の差や比率を求め、これらが解消する方向に、電池状態予測部702から出力される充電時の内部抵抗予測値Rpred_chgを補正する。同様に、補正部2101Bでは、許容放電電流Imax_dis1と許容放電電流Imax_dis2の差や比率を求め、これらが解消する方向に、電池状態予測部702から出力される放電時の内部抵抗予測値Rpred_disを補正する。なお、これらの差や比率の平均値を計算することで、充電側と放電側で共通の補正を実行しても良い。また、差や比率が所定の範囲内の場合は補正を行わずに、所定の範囲外となったときに補正を行ってもよい。さらに、組電池110の充放電時間や、電池状態予測部702が出力できるVPpred等の分極電圧に応じて、補正係数を決定してもよい。分極電圧VPpredを得るための分極抵抗403やキャパシタンス成分404、分極抵抗403とキャパシタンス成分404で決定される時定数を補正するようにしてもよい。いずれの場合でも、補正部2101Aおよび2101Bにおいて、許容充電電流Imax_chg1と許容充電電流Imax_chg2の差や比率、許容放電電流Imax_dis1と許容放電電流Imax_dis2の差や比率に応じた複数の補正係数を予め保持させれば、前記差や比率に応じて選択した補正係数を用いて、内部抵抗予測値Rpred_chg、Rpred_disなどをそれぞれ補正することができる。
本実施形態では、以上説明したような二つの例のいずれを用いた場合でも、第一許容電流演算部703と第二許容電流演算部704の出力を比較し、その比較結果に基づいて、第二許容電流演算部704の出力に含まれる許容電流誤差を改善できる。
図22は、本発明の第4の実施形態において許容電流演算部302から最終的に出力される許容電流の様子を示す図である。図22において、時刻T0から時刻T1までの期間内に、第一許容電流演算部703が出力するImax_chg1と、第二許容電流演算部704が出力するImax_chg2との間に、大きな違いが発生している。このとき、時刻T1以降では、上記の補正処理により、第二許容電流演算部704が出力するImax_chg2が補正されていることが分かる。また、時刻T1から時刻T2までの期間内に、第一許容電流演算部703が出力するImax_dis1と、第二許容電流演算部704が出力するImax_dis2との間に、大きな違いが発生している。このとき、時刻T2以降では、上記の補正処理により、第二許容電流演算部704が出力するImax_dis2が補正されていることが分かる。
以上説明した本発明の第4の実施形態によれば、以下の作用効果を奏する。
(1)組電池制御部150において、許容電流演算部302は、第一許容電流演算部703と、第二許容電流演算部704と、許容充電電流決定部705と、許容放電電流決定部706と、補正部2001Aおよび2001B、または補正部2101Aおよび2101Bとを備える。第一許容電流演算部703は、電圧検知部140により検知された組電池110の電圧に基づく組電池110の許容電流として、許容充電電流Imax_chg1および許容放電電流Imax_dis1を求める。第二許容電流演算部704は、組電池110の電圧を用いずに、組電池110の許容電流として、許容充電電流Imax_chg2および許容放電電流Imax_dis2を求める。補正部2001Aおよび2101Aは、許容充電電流Imax_chg1と許容充電電流Imax_chg2を比較し、その比較結果に基づいて所定の補正処理をそれぞれ行う。補正部2001Bおよび2101Bは、許容放電電流Imax_dis1と許容放電電流Imax_dis2を比較し、その比較結果に基づいて所定の補正処理をそれぞれ行う。このようにしたので、組電池110の劣化状態に応じた内部抵抗の上昇による影響を考慮して、組電池110の許容電流を高精度に検知することができる。
(2)補正部2001Aおよび2001Bは、第二許容電流演算部704による許容充電電流Imax_chg2と許容放電電流Imax_dis2の演算結果をそれぞれ補正することにより、補正処理を行う。また、補正部2101Aおよび2101Bは、第二許容電流演算部704が許容充電電流Imax_chg2や許容放電電流Imax_dis2を求めるために用いる組電池110の特性情報である内部抵抗予測値Rpred_chg、Rpred_disをそれぞれ補正する補正処理を行う。このようにしたので、組電池110の内部抵抗の上昇に応じて、得られる許容電流に対して適切な補正処理を行うことができる。
(3)補正部2001A、2001B、2101Aおよび2101Bは、許容充電電流Imax_chg1と許容充電電流Imax_chg2の差や比率、または許容放電電流Imax_dis1と許容放電電流Imax_dis2の差や比率に応じた複数の補正係数を予めそれぞれ保持しており、その複数の補正係数の中から選択した補正係数を用いて、それぞれの補正処理を行う。このようにしたので、組電池110の内部抵抗の上昇によって生じる許容充電電流Imax_chg2や許容放電電流Imax_dis2の変化分に応じて、適切に補正処理を行うことができる。
(4)補正部2001A、2001B、2101Aおよび2101Bは、組電池110の充放電時間またはVPpred等の分極電圧に応じて、それぞれの補正処理に用いる補正係数を決定することができる。このようにすれば、組電池110の劣化状態を考慮して、さらに適切な補正処理を行うことができる。
(5)補正部2001Aおよび2101Aは、組電池110が充電されているときに、許容充電電流Imax_chg1と許容充電電流Imax_chg2を比較し、その比較結果に基づいてそれぞれの補正処理を行う。また、補正部2001Bおよび2101Bは、組電池110が放電されているときに、許容放電電流Imax_dis1と許容放電電流Imax_dis2を比較し、その比較結果に基づいてそれぞれの補正処理を行う。このようにしたので、組電池110の充放電状態に応じて、補正処理の対象とする許容電流を適切に切り替えることができる。
<第5の実施形態>
次に本発明の第5の実施形態について説明する。本実施形態では、許容電流の演算結果を監視して組電池110の劣化状態を推定し、その推定結果に基づいて組電池110の寿命判定を行う例について説明する。
次に本発明の第5の実施形態について説明する。本実施形態では、許容電流の演算結果を監視して組電池110の劣化状態を推定し、その推定結果に基づいて組電池110の寿命判定を行う例について説明する。
図23は、本発明の第5の実施形態において組電池制御部150が行う処理内容を表すブロック線図である。図23に示すように、本実施形態の組電池制御部150は、第1の実施形態において図3に示したブロック線図と比べて、許容電流演算部302の出力を監視して組電池110の劣化状態を推定する劣化推定部2301をさらに備えている。
前述したように、組電池110は、充放電を繰り返すに従って劣化が進行すると、内部抵抗が増加して満充電容量が低下するなどの特性変化が生じる。組電池110において内部抵抗が増加すると、許容電流は低下する。劣化推定部2301は、この許容電流の低下度合いを監視することで、組電池110の劣化を推定する。具体的には、以下の式(21)を用いた許容電流の低下度合いの算出結果をSOHと定義した場合の、組電池110のSOHを求める。式(21)において、Imax_newは新品時の組電池110の許容電流を表し、Imax_detは現在の(劣化時の)組電池110の許容電流を表している。
SOH=Imax_det/Imax_new (21)
SOH=Imax_det/Imax_new (21)
前述の各実施形態で説明したように、許容電流演算部302では、図7、14、20および21に示したように、第一許容電流演算部703で求められた許容充電電流Imax_chg1と、第二許容電流演算部704で求められた許容充電電流Imax_chg2とに基づいて、許容充電電流決定部705により許容充電電流Imax_chgが決定される。また、第一許容電流演算部703で求められた許容放電電流Imax_dis1と、第二許容電流演算部704で求められた許容放電電流Imax_dis2とに基づいて、許容放電電流決定部706により許容放電電流Imax_disが決定される。劣化推定部2301は、これら許容充電電流Imax_chgおよび許容放電電流Imax_disの一方、または両方に着目して、組電池110の使用を開始した時点での許容電流演算部302からの出力をImax_newとして記憶しておき、現在の許容電流演算部302からの出力をImax_detとして、式(21)により、現在の組電池110のSOHを推定することができる。この場合、許容充電電流Imax_chgと許容放電電流Imax_disを平均化して、Imax_detやImax_newを求めるようにしてもよい。
あるいは、劣化推定部2301において、第一許容電流演算部703からの出力や、第二許容電流演算部704からの出力を直接用いて、現在の組電池110のSOHを推定してもよい。すなわち、第一許容電流演算部703の出力に着目した場合は、組電池110の使用を開始した時点での許容充電電流Imax_chg1および許容放電電流Imax_dis1の一方または両方をImax_newとし、現在の許容充電電流Imax_chg1および許容放電電流Imax_dis1の一方または両方をImax_detとして、式(21)により、現在の組電池110のSOHを推定することができる。また、第二許容電流演算部704の出力に着目した場合は、組電池110の使用を開始した時点での許容充電電流Imax_chg2および許容放電電流Imax_dis2の一方または両方をImax_newとし、現在の許容充電電流Imax_chg2および許容放電電流Imax_dis2の一方または両方をImax_detとして、式(21)により、現在の組電池110のSOHを推定することができる。
以上説明したようにして劣化推定部2301が推定した組電池110のSOHは、車両制御部200により受信される。車両制御部200は、受信したSOHの値が予め定めた閾値を下回った場合に、組電池110が寿命であると判定する。なお、こうした組電池110の寿命判定を劣化推定部2301において行うようにしてもよい。また、SOHというパラメータで判定せず、演算して得られた許容電流値が閾値を下回った場合に寿命と判定することも可能である。
以上説明した本発明の第5の実施形態によれば、劣化推定部2301は、第一許容電流演算部703による許容電流の演算結果および第二許容電流演算部704による許容電流の演算結果の少なくとも一つを監視し、組電池110の劣化状態を推定する。このようにしたので、電池システム100において、組電池110の劣化の進行状況を的確に判定することができる。
また、劣化推定部2301は、組電池110の劣化状態の推定結果に基づいて、組電池110が寿命であるかを判定してもよい。このようにすれば、電池システム100において、組電池110の寿命判定を的確に行うことができる。
<第6の実施形態>
次に本発明の第6の実施形態について説明する。本実施形態では、許容電流の補正結果を監視して組電池110の劣化状態を推定し、その推定結果に基づいて組電池110の寿命判定を行う例について説明する。
次に本発明の第6の実施形態について説明する。本実施形態では、許容電流の補正結果を監視して組電池110の劣化状態を推定し、その推定結果に基づいて組電池110の寿命判定を行う例について説明する。
図24は、本発明の第6の実施形態における許容電流演算部302のブロック線図である。第4の実施形態で説明した図20のブロック線図と比較して、図24では、劣化推定部2401がさらに加えられている。劣化推定部2401は、補正部2001Aによる許容電流の補正量または補正率を示す係数Kcと、補正部2001Bによる許容電流の補正量または補正率を示す係数Kdとを監視することで、組電池110のSOHを推定する。組電池110が劣化すると許容電流が小さくなるため、補正部2001Aと補正部2001Bは許容電流の演算結果をこれに合わせるように補正する。このための許容電流の補正量または補正率を示す係数KcとKdはSOHの代わりに組電池110の劣化度合いを把握するためのパラメータとして用いることができるためである。
以上説明した本発明の第6の実施形態によれば、劣化推定部2401は、補正部2001A、2001Bによる補正処理の結果を監視し、組電池110の劣化状態を推定する。このようにしたので、電池システム100において、組電池110の劣化の進行状況を的確に判定することができる。
また、劣化推定部2401は、組電池110の劣化状態の推定結果に基づいて、組電池110が寿命であるかを判定してもよい。このようにすれば、電池システム100において、組電池110の寿命判定を的確に行うことができる。
<第7の実施形態>
次に本発明の第7の実施形態について説明する。本実施形態では、組電池110の特定情報の補正結果を監視して組電池110の劣化状態を推定し、その推定結果に基づいて組電池110の寿命判定を行う例について説明する。
次に本発明の第7の実施形態について説明する。本実施形態では、組電池110の特定情報の補正結果を監視して組電池110の劣化状態を推定し、その推定結果に基づいて組電池110の寿命判定を行う例について説明する。
図25は、本発明の第7の実施形態における許容電流演算部302のブロック線図である。第4の実施形態で説明した図21のブロック線図と比較して、図25では、劣化推定部2501がさらに加えられている。劣化推定部2501は、補正部2101A、2101Bによる電池状態予測部702からの出力に対する補正結果Rtを監視することで、組電池110のSOHを推定する。たとえば、補正部2101A、2101Bにより補正された内部抵抗予測値Rpred_chg、Rpred_disを補正結果Rtとして取得し、これを用いて、以下の式(22)により、現在の組電池110のSOHを推定することができる。式(22)において、R_newは新品時の組電池110の内部抵抗を表し、R_detは現在の(劣化時の)組電池110の内部抵抗を表している。
SOH=R_det/R_new (22)
SOH=R_det/R_new (22)
前述の第4の実施形態で説明したように、補正部2101Aは、第一許容電流演算部703で求められた許容充電電流Imax_chg1と、第二許容電流演算部704で求められた許容充電電流Imax_chg2とに基づいて、電池状態予測部702から出力される充電時の内部抵抗予測値Rpred_chgを補正する。また、補正部2101Bは、第一許容電流演算部703で求められた許容放電電流Imax_dis1と、第二許容電流演算部704で求められた許容放電電流Imax_dis2とに基づいて、電池状態予測部702から出力される放電時の内部抵抗予測値Rpred_disを補正する。劣化推定部2501は、これら内部抵抗予測値Rpred_chgおよびRpred_disの補正結果の一方、または両方に着目して、組電池110の使用を開始した時点での電池状態予測部702からの出力をR_newとして記憶しておき、現在の電池状態予測部702からの出力をR_detとして、式(22)により、現在の組電池110のSOHを推定することができる。この場合、充電時の内部抵抗予測値Rpred_chgと放電時の内部抵抗予測値Rpred_disを平均化して、R_detやR_newを求めるようにしてもよい。
以上説明した本発明の第7の実施形態によれば、劣化推定部2501は、補正部2101A、2101Bによる補正処理の結果を監視し、組電池110の劣化状態を推定する。このようにしたので、電池システム100において、組電池110の劣化の進行状況を的確に判定することができる。
また、劣化推定部2501は、組電池110の劣化状態の推定結果に基づいて、組電池110が寿命であるかを判定してもよい。このようにすれば、電池システム100において、組電池110の寿命判定を的確に行うことができる。
以上の各実施形態では、本発明を具体的に説明したが、本発明はこれらの各実施形態に限定されるものではなく、その要旨を逸脱しない範囲で種々に変更可能であることは言うまでもない。さらに、各実施の形態を任意に組み合わせて実施することも可能である。
また、上記各構成、機能、処理部などは、それらの全部または一部を、例えば集積回路で設計することによりハードウェアとして実現することもできるし、プロセッサがそれぞれの機能を実現するプログラムを実行することによりソフトウェアとして実現することもできる。各機能を実現するプログラム、テーブルなどの情報は、メモリやハードディスクなどの記憶装置、ICカード、DVDなどの記憶媒体に格納することができる。また、これらの記憶媒体やインターネットなどの電気通信回線を通じて、上記の各実施形態による電池システム100の組電池制御部150に、各実施形態で説明したような処理を実行させるためのプログラムを提供することもできる。
図26は、組電池制御部150にプログラムを提供する様子を示す図である。パーソナルコンピュータ10は、組電池制御部150と接続されており、サーバ装置11から通信回線12を介して提供されたプログラム、またはCD-ROM13から読み出したプログラムを組電池制御部150に供給する。また、パーソナルコンピュータ10を介さずに、サーバ装置11から通信回線12を介して組電池制御部150にプログラムを供給することもできる。通信回線12は、インターネット、パソコン通信などの通信回線、専用通信回線、携帯電話回線網などである。サーバ11は、通信回線12を介してプログラムをパーソナルコンピュータ10や組電池制御部150に送信する。すなわち、プログラムを搬送波上のデータ信号に変換して、通信回線12を介して送信する。このように、記録媒体や搬送波などの種々の形態のコンピュータ読み込み可能なプログラム製品として、組電池制御部150において実行可能なプログラムを提供することができる。
次の優先権基礎出願の開示内容は引用文としてここに組み込まれる。
日本国特許出願2014年第146750号(2014年7月17日出願)
日本国特許出願2014年第146750号(2014年7月17日出願)
100:電池システム、110:組電池、111:単電池、112:単電池群、120:単電池管理部、121:単電池制御部、122:電圧検出回路、123:制御回路、124:信号入出力回路、125:温度検知部、130:電流検知部、140:電圧検知部、150:組電池制御部、160:信号通信手段、170:絶縁素子、180:記憶部、200:車両制御部、300a~300d:リレー、301:充電状態演算部、302:許容電流演算部、400:インバータ、410:モータジェネレータ、420:充電器、701:内部抵抗検知部、702:電池状態予測部、703:第一許容電流演算部、704:第二許容電流演算部、705:許容充電電流決定部、706:許容放電電流決定部、2001A,2001B,2101A,2101B:補正部、2301,2401,2501:劣化推定部
Claims (10)
- 電池の状態を検知する装置であって、
電圧検知部により検知された前記電池の電圧に基づく前記電池の第一の許容電流を求める第一許容電流演算部と、
前記電池の電圧を用いずに前記電池の第二の許容電流を求める第二許容電流演算部と、
前記第一の許容電流と前記第二の許容電流を比較し、その比較結果に基づいて所定の補正処理を行う補正部と、を備える電池状態検知装置。 - 請求項1に記載の電池状態検知装置において、
前記補正部は、前記第二の許容電流演算部による前記第二の許容電流の演算結果、または前記第二の許容電流演算部が前記第二の許容電流を求めるために用いる前記電池の特性情報を補正することにより、前記補正処理を行う電池状態検知装置。 - 請求項2に記載の電池状態検知装置において、
前記補正部は、前記第一の許容電流と前記第二の許容電流の差に応じた複数の補正係数を予め保持しており、前記複数の補正係数の中から選択した補正係数を用いて前記補正処理を行う電池状態検知装置。 - 請求項3に記載の電池状態検知装置において、
前記補正部は、前記電池の充放電時間または前記電池の分極電圧に基づいて、前記補正処理に用いる前記補正係数を決定する電池状態検知装置。 - 請求項1乃至4のいずれか一項に記載の電池状態検知装置において、
前記第一許容電流演算部による前記第一の許容電流の演算結果、前記第二許容電流演算部による前記第二の許容電流の演算結果、前記補正部による前記補正処理の結果の少なくとも一つを監視し、前記電池の劣化状態を推定する劣化推定部をさらに備える電池状態検知装置。 - 請求項5に記載の電池状態検知装置において、
前記劣化推定部は、前記電池の劣化状態の推定結果に基づいて、前記電池が寿命であるか否かを判定する電池状態検知装置。 - 請求項1に記載の電池状態検知装置において、
前記第一の許容電流は、前記電池の充電に対する第一の許容充電電流と、前記電池の放電に対応する第一の許容放電電流とを含み、
前記第二の許容電流は、前記電池の充電に対する第二の許容充電電流と、前記電池の放電に対応する第二の許容放電電流とを含み、
前記補正部は、
前記電池が充電されているときには、前記第一の許容充電電流と前記第二の許容充電電流を比較し、その比較結果に基づいて前記補正処理を行い、
前記補正部は、
前記電池が放電されているときには、前記第一の許容放電電流と前記第二の許容放電電流を比較し、その比較結果に基づいて前記補正処理を行う電池状態検知装置。 - 請求項1乃至7のいずれか一項に記載の電池状態検知装置と、
前記電圧検知部により電圧が検知され、前記第一の許容電流および前記第二の許容電流の少なくとも一つに基づいて決定された許容電流に基づいて充放電される二次電池と、を備える二次電池システム。 - 電池に接続された電池状態検知装置内のコンピュータにより実行されるプログラム製品であって、前記コンピュータを、
前記電池の電圧検知結果に基づく前記電池の第一の許容電流を求める第一許容電流演算部と、
前記電池の電圧検知結果を用いずに前記電池の第二の許容電流を求める第二許容電流演算部と、
前記第一の許容電流と前記第二の許容電流を比較し、その比較結果に基づいて所定の補正処理を行う補正部として機能させるプログラム製品。 - 電池の状態を検知する方法であって、
前記電池の電圧を検知し、
前記電池の電圧検知結果に基づく前記電池の第一の許容電流を求め、
前記電池の電圧検知結果を用いずに前記電池の第二の許容電流を求め、
前記第一の許容電流と前記第二の許容電流を比較し、その比較結果に基づいて所定の補正処理を行う電池状態検知方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP15822305.7A EP3171187B1 (en) | 2014-07-17 | 2015-06-12 | Battery state detection device, secondary battery system, program product, and battery state detection method |
| US15/317,025 US10725111B2 (en) | 2014-07-17 | 2015-06-12 | Battery state detection device, secondary battery system, program product, and battery state detection method |
| CN201580039065.XA CN106662621B (zh) | 2014-07-17 | 2015-06-12 | 电池状态检测装置、二次电池系统、程序产品和电池状态检测方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014146750A JP6324248B2 (ja) | 2014-07-17 | 2014-07-17 | 電池状態検知装置、二次電池システム、電池状態検知プログラム、電池状態検知方法 |
| JP2014-146750 | 2014-07-17 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016009757A1 true WO2016009757A1 (ja) | 2016-01-21 |
Family
ID=55078258
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/067007 WO2016009757A1 (ja) | 2014-07-17 | 2015-06-12 | 電池状態検知装置、二次電池システム、プログラム製品、電池状態検知方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10725111B2 (ja) |
| EP (1) | EP3171187B1 (ja) |
| JP (1) | JP6324248B2 (ja) |
| CN (1) | CN106662621B (ja) |
| WO (1) | WO2016009757A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018047258A1 (ja) * | 2016-09-07 | 2018-03-15 | 日立化成株式会社 | シミュレーション方法およびシミュレーション装置 |
| CN110281812A (zh) * | 2019-06-27 | 2019-09-27 | 一汽解放汽车有限公司 | 一种基于工况识别的续航里程估算系统 |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015155859A (ja) * | 2014-02-21 | 2015-08-27 | ソニー株式会社 | 電池残量推定装置、電池パック、蓄電装置、電動車両および電池残量推定方法 |
| KR102554151B1 (ko) * | 2017-10-24 | 2023-07-12 | 삼성전자주식회사 | 배터리 충전 방법 및 장치 |
| CN108407626B (zh) * | 2018-01-12 | 2020-12-22 | 山东艾诺仪器有限公司 | 人工智能电动车电池电量检测修正及阶段充电电路 |
| JP2019132696A (ja) * | 2018-01-31 | 2019-08-08 | トヨタ自動車株式会社 | 全固体電池の制御装置 |
| KR102373449B1 (ko) | 2018-02-01 | 2022-03-10 | 주식회사 엘지에너지솔루션 | 배터리의 전력 한계 결정 방법 및 배터리 관리 시스템 |
| US11841401B2 (en) | 2018-08-28 | 2023-12-12 | Honda Motor Co., Ltd. | Diagnostic device, diagnostic method, diagnostic system, and program |
| CN112277724A (zh) * | 2019-07-25 | 2021-01-29 | 北汽福田汽车股份有限公司 | 电池系统的管理方法、管理装置、存储介质和车辆 |
| US11522440B2 (en) * | 2020-07-29 | 2022-12-06 | Cirrus Logic, Inc. | Use of shared feedback among two or more reactive schemes |
| EP4071885B1 (en) * | 2021-02-09 | 2024-10-23 | Contemporary Amperex Technology (Hong Kong) Limited | Battery charging method, controller, battery management system, battery, and electric apparatus |
| FR3122536B1 (fr) * | 2021-04-29 | 2023-06-30 | Psa Automobiles Sa | Contrôle d'un ensemble électrique pour une batterie électrique d'un véhicule automobile |
| FR3123518A1 (fr) * | 2021-05-26 | 2022-12-02 | Psa Automobiles Sa | Procede de gestion energetique d’une batterie de servitude au lithium-ion |
| CN116325286A (zh) * | 2021-07-29 | 2023-06-23 | 宁德时代新能源科技股份有限公司 | 充放电装置、电池充电的方法和充放电系统 |
| KR102508333B1 (ko) * | 2022-11-04 | 2023-03-10 | 씨에스테크놀로지 주식회사 | 전기자동차의 충전 시간 단축을 위한 충전전류 제어 방법 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006197727A (ja) * | 2005-01-13 | 2006-07-27 | Sanyo Electric Co Ltd | 電池の制限電流制御方法 |
| JP4722857B2 (ja) * | 2003-11-20 | 2011-07-13 | エルジー・ケム・リミテッド | 進歩セルモデル予測技術を用いたバッテリパックの電力容量の計算方法 |
| WO2013094057A1 (ja) * | 2011-12-22 | 2013-06-27 | 日立ビークルエナジー株式会社 | 電池制御装置、電池システム |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4097183B2 (ja) * | 2001-12-27 | 2008-06-11 | パナソニックEvエナジー株式会社 | 二次電池の残存容量推定方法および装置、並びに電池パックシステム |
| JP2006129588A (ja) * | 2004-10-28 | 2006-05-18 | Sanyo Electric Co Ltd | 二次電池の電力制御方法及び電源装置 |
| JP4488426B2 (ja) * | 2005-06-08 | 2010-06-23 | 富士重工業株式会社 | 蓄電デバイスの制御装置 |
| JP5004557B2 (ja) | 2006-11-09 | 2012-08-22 | 三洋電機株式会社 | 電池の劣化度の検出方法 |
| JP4987581B2 (ja) * | 2007-06-15 | 2012-07-25 | 日立ビークルエナジー株式会社 | 電池制御装置 |
| JP5040733B2 (ja) | 2008-03-05 | 2012-10-03 | 日産自動車株式会社 | 電池の充放電可能電力推定方法 |
| JP4856209B2 (ja) | 2009-03-30 | 2012-01-18 | 株式会社東芝 | 電池性能測定装置、電池制御システム及び車両 |
| JP5646214B2 (ja) * | 2010-05-27 | 2014-12-24 | 三洋電機株式会社 | 電源装置 |
| DE102010062856A1 (de) | 2010-12-10 | 2012-06-21 | Sb Limotive Company Ltd. | Verfahren zur Ermittlung von Betriebsparametern einer Batterie, Batteriemanagementsystem und Batterie |
| CN102074757B (zh) * | 2010-12-24 | 2013-02-13 | 惠州市亿能电子有限公司 | 一种锂离子电池荷电状态的估算方法 |
| WO2012091077A1 (ja) * | 2010-12-28 | 2012-07-05 | 三洋電機株式会社 | 電池の劣化度の検出方法 |
| WO2012169062A1 (ja) * | 2011-06-10 | 2012-12-13 | 日立ビークルエナジー株式会社 | 電池制御装置、電池システム |
| CN103635822B (zh) * | 2011-08-30 | 2016-02-10 | 三洋电机株式会社 | 电池系统、电动车辆、移动体、电力储存装置以及电源装置 |
| CN104471414B (zh) | 2012-05-24 | 2017-04-05 | 日立汽车系统株式会社 | 电池控制装置 |
| JPWO2014083856A1 (ja) * | 2012-11-30 | 2017-01-05 | 三洋電機株式会社 | 電池管理装置、電源装置およびsoc推定方法 |
-
2014
- 2014-07-17 JP JP2014146750A patent/JP6324248B2/ja active Active
-
2015
- 2015-06-12 US US15/317,025 patent/US10725111B2/en active Active
- 2015-06-12 WO PCT/JP2015/067007 patent/WO2016009757A1/ja active Application Filing
- 2015-06-12 CN CN201580039065.XA patent/CN106662621B/zh active Active
- 2015-06-12 EP EP15822305.7A patent/EP3171187B1/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4722857B2 (ja) * | 2003-11-20 | 2011-07-13 | エルジー・ケム・リミテッド | 進歩セルモデル予測技術を用いたバッテリパックの電力容量の計算方法 |
| JP2006197727A (ja) * | 2005-01-13 | 2006-07-27 | Sanyo Electric Co Ltd | 電池の制限電流制御方法 |
| WO2013094057A1 (ja) * | 2011-12-22 | 2013-06-27 | 日立ビークルエナジー株式会社 | 電池制御装置、電池システム |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3171187A4 * |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018047258A1 (ja) * | 2016-09-07 | 2018-03-15 | 日立化成株式会社 | シミュレーション方法およびシミュレーション装置 |
| JPWO2018047258A1 (ja) * | 2016-09-07 | 2019-06-24 | 日立化成株式会社 | シミュレーション方法およびシミュレーション装置 |
| CN110281812A (zh) * | 2019-06-27 | 2019-09-27 | 一汽解放汽车有限公司 | 一种基于工况识别的续航里程估算系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3171187B1 (en) | 2019-08-28 |
| EP3171187A4 (en) | 2018-04-04 |
| CN106662621A (zh) | 2017-05-10 |
| JP2016023968A (ja) | 2016-02-08 |
| US20170131360A1 (en) | 2017-05-11 |
| EP3171187A1 (en) | 2017-05-24 |
| JP6324248B2 (ja) | 2018-05-16 |
| CN106662621B (zh) | 2020-09-15 |
| US10725111B2 (en) | 2020-07-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6324248B2 (ja) | 電池状態検知装置、二次電池システム、電池状態検知プログラム、電池状態検知方法 | |
| JP6316690B2 (ja) | 電池状態検知装置、二次電池システム、電池状態検知プログラム、電池状態検知方法 | |
| US11124072B2 (en) | Battery control device and electric motor vehicle system | |
| JP6033155B2 (ja) | 電池制御装置 | |
| US10209317B2 (en) | Battery control device for calculating battery deterioration based on internal resistance increase rate | |
| JP6101714B2 (ja) | 電池制御装置、電池システム | |
| CN103608994A (zh) | 电池控制装置、电池系统 | |
| JP7067549B2 (ja) | 蓄電素子管理装置及び蓄電素子管理方法 | |
| KR20090130406A (ko) | 충전상태를 이용한 전지 평활화 시스템 및 방법 | |
| WO2017056732A1 (ja) | 電池制御装置及び電池システム | |
| WO2022049804A1 (en) | Determination device relating to plurality of batteries, electricity storage system, determination method and determination program | |
| JPWO2015019875A1 (ja) | 電池制御システム、車両制御システム | |
| JPWO2019230131A1 (ja) | 充電制御装置、輸送機器、及びプログラム | |
| JP5851514B2 (ja) | 電池制御装置、二次電池システム | |
| JP2016024170A (ja) | 電池制御装置 | |
| JP2014176196A (ja) | 電池制御装置及び電池制御方法 | |
| KR102375843B1 (ko) | 배터리 관리 장치 및 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15822305 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15317025 Country of ref document: US |
|
| REEP | Request for entry into the european phase |
Ref document number: 2015822305 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2015822305 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |