WO2015111633A1 - 咬合測定装置及び咬合力検出方法 - Google Patents
咬合測定装置及び咬合力検出方法 Download PDFInfo
- Publication number
- WO2015111633A1 WO2015111633A1 PCT/JP2015/051568 JP2015051568W WO2015111633A1 WO 2015111633 A1 WO2015111633 A1 WO 2015111633A1 JP 2015051568 W JP2015051568 W JP 2015051568W WO 2015111633 A1 WO2015111633 A1 WO 2015111633A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- electrodes
- electrode
- potential
- sensor sheet
- intersection
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 24
- 238000005259 measurement Methods 0.000 title description 9
- 238000012545 processing Methods 0.000 claims abstract description 84
- 230000010365 information processing Effects 0.000 claims abstract description 34
- 230000010354 integration Effects 0.000 claims abstract description 20
- 230000008859 change Effects 0.000 claims abstract description 12
- 238000004364 calculation method Methods 0.000 claims description 29
- 238000001514 detection method Methods 0.000 claims description 25
- 210000004513 dentition Anatomy 0.000 claims description 18
- 230000036346 tooth eruption Effects 0.000 claims description 18
- 230000008569 process Effects 0.000 claims description 16
- 239000010408 film Substances 0.000 description 27
- 238000010586 diagram Methods 0.000 description 19
- 230000006870 function Effects 0.000 description 12
- 238000004458 analytical method Methods 0.000 description 7
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 6
- 229910052799 carbon Inorganic materials 0.000 description 6
- WVMLRRRARMANTD-FHLIZLRMSA-N ram-316 Chemical compound C1=CCC[C@@]2(O)[C@H]3CC4=CC=C(OC)C(O)=C4[C@]21CCN3C WVMLRRRARMANTD-FHLIZLRMSA-N 0.000 description 6
- 239000010409 thin film Substances 0.000 description 5
- 239000011159 matrix material Substances 0.000 description 4
- 238000005070 sampling Methods 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 3
- 230000001419 dependent effect Effects 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 229910052751 metal Inorganic materials 0.000 description 3
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000036541 health Effects 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 230000001965 increasing effect Effects 0.000 description 2
- 238000013507 mapping Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 229920000139 polyethylene terephthalate Polymers 0.000 description 2
- 239000005020 polyethylene terephthalate Substances 0.000 description 2
- 229920002981 polyvinylidene fluoride Polymers 0.000 description 2
- 230000001681 protective effect Effects 0.000 description 2
- 239000011347 resin Substances 0.000 description 2
- 229920005989 resin Polymers 0.000 description 2
- 229910052710 silicon Inorganic materials 0.000 description 2
- 239000010703 silicon Substances 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 239000002033 PVDF binder Substances 0.000 description 1
- 240000004050 Pentaglottis sempervirens Species 0.000 description 1
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 description 1
- 239000002253 acid Substances 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 239000011889 copper foil Substances 0.000 description 1
- 230000006837 decompression Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 238000010292 electrical insulation Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000011888 foil Substances 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- -1 polyethylene terephthalate Polymers 0.000 description 1
- 230000008439 repair process Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 210000003296 saliva Anatomy 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000004544 sputter deposition Methods 0.000 description 1
- 238000001931 thermography Methods 0.000 description 1
- 210000000707 wrist Anatomy 0.000 description 1
Images







Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C19/00—Dental auxiliary appliances
- A61C19/04—Measuring instruments specially adapted for dentistry
- A61C19/05—Measuring instruments specially adapted for dentistry for determining occlusion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C19/00—Dental auxiliary appliances
- A61C19/04—Measuring instruments specially adapted for dentistry
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C9/00—Impression cups, i.e. impression trays; Impression methods
- A61C9/004—Means or methods for taking digitized impressions
- A61C9/0046—Data acquisition means or methods
- A61C9/008—Mechanical means or methods, e.g. a contact probe moving over the teeth
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/14—Measuring force or stress, in general by measuring variations in capacitance or inductance of electrical elements, e.g. by measuring variations of frequency of electrical oscillators
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/16—Measuring force or stress, in general using properties of piezoelectric devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C9/00—Impression cups, i.e. impression trays; Impression methods
- A61C9/004—Means or methods for taking digitized impressions
- A61C9/0046—Data acquisition means or methods
Definitions
- the second ideal diode 308 outputs only the positive voltage component of the signal amplified by the inverting amplifier 307.
- the output signal of the first ideal diode 306 is held for each sampling clock by the first sample hold circuit 309 and then converted to digital data by the first A / D converter 310.
- the output signal of the second ideal diode 308 is held for each sampling clock by the second sample and hold circuit 311 and then converted to digital data by the second A / D converter 312.
- the first sample hold circuit 309 and the second sample hold circuit 311 are “S / H”, the first A / D converter 310, and the second A / D.
- the converter 312 is simply expressed as “A / D”. That is, the positive signal component of the AC signal output from the differential amplifier 303 is digitized by the first A / D converter 310, and the negative signal component is numeric by the second A / D converter 312. It becomes.
- FIG. 8A is a conceptual diagram in the form of a graph showing changes on the time axis of the occlusal force.
- FIG. 8B is a conceptual diagram in the form of a graph showing changes on the time axis of signals detected from the sensor sheet 102.
- the graphs of FIGS. 8A and 8B coincide on the time axis.
- 8A and 8B are graphs assuming that the patient 110 bites the sensor sheet 102 with a constant maximum bite force.
- an integral operation must be performed on the raw data obtained from the sensor sheet 102.
- occlusal force display area 903 portions where the occlusal force is generated are displayed on the check bite image in different colors or displayed as a bar graph corresponding to the occlusal force. Further, a location P909 where the occlusion pressure is first generated in the sensor sheet 102 during occlusion and a location P910 displayed in the occlusal force display area 903 are marked.
- the moving image generation processing unit 712 performs color coding processing according to the strength of the occlusal force.
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Dentistry (AREA)
- Epidemiology (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Biophysics (AREA)
- Biomedical Technology (AREA)
- Engineering & Computer Science (AREA)
- Dental Tools And Instruments Or Auxiliary Dental Instruments (AREA)
Abstract
情報処理装置104は、有機圧電フィルム201を用いたセンサシート102を有する咬合力検出装置が出力した、交点毎のアドレス情報と、咬合力の変化を示す信号に基づくデータを含む生データに対し、交点毎に積分演算処理を行って、咬合力のデータを作成する。
Description
本発明は、歯科医師、歯科技工士等が患者の歯の咬み合わせに関する情報を取得するための咬合測定装置及び咬合力検出方法に関する。
健康の維持は、人のQOL(クォリティ・オブ・ライフ:生活の質)に必須である。医療分野においては、人々の健康の維持を図るために、医療行為には様々な技術革新がもたらされている。近年では、電子デバイスの性能向上が、医療行為の技術革新にも貢献している。しかし、幾つかの医療行為には、未だ改良が進んでいないものも見受けられる。本発明は、そのような早期の改良が待たれる医療行為のうちの一つである、患者の歯の咬み合わせに関する情報を得る、咬合分析に関する。
現在、患者の咬合分析を行う際には、朱色のカーボンシートを用いた咬合部視認方法が、殆どの歯科技工士等によって行われている。患者が朱色のカーボンシートを噛むと、歯に朱色のカーボンが付着する。付着したカーボンは歯と歯が噛み合わせによって接触したことを示す。
特許文献1は、本発明の先行技術に相当する、抵抗膜を用いた、咬合測定用接点検出器に関する先行技術文献である。
特許文献2は触覚マトリックスセンサーの圧力分布を素早く検出する方法に関する技術文献である。
特許文献2は触覚マトリックスセンサーの圧力分布を素早く検出する方法に関する技術文献である。
朱色のカーボンシートを用いた咬合部視認方法は、歯列が咬合する部位はわかるものの、(1)歯列が咬合する順序がわからない、(2)歯列が咬合する強さがわからない、(3)歯列全体を俯瞰してどの部位が咬合しているのかを一目で把握できない、(4)自然歯、金属歯、補修歯等の種類によって、朱色カーボンが転写される量が異なるため、咬合状態の把握が不正確になりやすい、等の問題点がある。特に、一部の歯科技工士は、(3)の、歯列全体の咬合状態を把握するために、患者の口腔内に鏡を差し込み、デジタルカメラで撮影する、等の手間をかけている。
特許文献1に開示される、抵抗膜を使用したセンサシートを用いる咬合測定装置は、分解能が低く、センサシートが高価なために、僅かな使用にとどまっている。
特許文献2に開示される技術では、マトリックスセンサー上に1つの接触群を見つけることは出来るが、マトリックス平面上に複数の接触群が存在する際には適用することができないといった問題がある。
特許文献2に開示される技術では、マトリックスセンサー上に1つの接触群を見つけることは出来るが、マトリックス平面上に複数の接触群が存在する際には適用することができないといった問題がある。
本発明はかかる課題を解決し、咬合分析に関し高精度かつ迅速にして多岐に渡る情報を出力できる咬合測定装置と、咬合力検出方法を提供することを目的とする。
上記課題を解決するために、本発明の咬合測定装置は、センサシートと、咬合力検出装置と、情報処理装置よりなる。
センサシートは、感圧フィルムと、感圧フィルムの一の面に形成される複数のX電極と、感圧フィルムの他の面に形成される、複数のX電極と直交する複数のY電極とを具備する。
咬合力検出装置は、複数のX電極のうちの一つと、複数のY電極のうちの一つとの相対電位を出力する差動増幅器と、差動増幅器の出力信号に基づくデータを出力するA/D変換器と、複数のX電極と差動増幅器との間に接続される第一マルチプレクサと、複数のY電極と差動増幅器との間に接続される第二マルチプレクサと、第一マルチプレクサと第二マルチプレクサを制御すると共に、X電極及びY電極のアドレス情報を生成して、データと共に後続の装置に出力する制御部とを具備する。制御部は、第一マルチプレクサ及び第二マルチプレクサを制御して、複数のX電極と複数のY電極の何れか一方の電極群を一定の電圧のノードに接続しつつ、他方の電極の電位を検出して、所定の電位を検出した電極よりなる特定アドレス範囲を特定した後、複数のX電極のうち、所定の電位を検出した電極群と、複数のY電極のうち、所定の電位を検出した電極群とで構成される交点を走査して、所定の相対電位を検出する交点よりなる走査アドレス領域を特定して、走査アドレス領域に含まれる交点における、X電極とY電極の相対電位を差動増幅器から出力させる。
情報処理装置は、歯列に咬合力に基づく圧力が発生した箇所のアドレス情報と、咬合力の変化を示すデータに対し、アドレス情報毎に積分演算処理を行う積分演算処理部と、積分演算処理部によって積分されたデータを、アドレス情報に基づいて動画像データを作成する動画生成処理部とを具備する。
センサシートは、感圧フィルムと、感圧フィルムの一の面に形成される複数のX電極と、感圧フィルムの他の面に形成される、複数のX電極と直交する複数のY電極とを具備する。
咬合力検出装置は、複数のX電極のうちの一つと、複数のY電極のうちの一つとの相対電位を出力する差動増幅器と、差動増幅器の出力信号に基づくデータを出力するA/D変換器と、複数のX電極と差動増幅器との間に接続される第一マルチプレクサと、複数のY電極と差動増幅器との間に接続される第二マルチプレクサと、第一マルチプレクサと第二マルチプレクサを制御すると共に、X電極及びY電極のアドレス情報を生成して、データと共に後続の装置に出力する制御部とを具備する。制御部は、第一マルチプレクサ及び第二マルチプレクサを制御して、複数のX電極と複数のY電極の何れか一方の電極群を一定の電圧のノードに接続しつつ、他方の電極の電位を検出して、所定の電位を検出した電極よりなる特定アドレス範囲を特定した後、複数のX電極のうち、所定の電位を検出した電極群と、複数のY電極のうち、所定の電位を検出した電極群とで構成される交点を走査して、所定の相対電位を検出する交点よりなる走査アドレス領域を特定して、走査アドレス領域に含まれる交点における、X電極とY電極の相対電位を差動増幅器から出力させる。
情報処理装置は、歯列に咬合力に基づく圧力が発生した箇所のアドレス情報と、咬合力の変化を示すデータに対し、アドレス情報毎に積分演算処理を行う積分演算処理部と、積分演算処理部によって積分されたデータを、アドレス情報に基づいて動画像データを作成する動画生成処理部とを具備する。
また、上記課題を解決するために、本発明の咬合力検出方法は、特定アドレス範囲特定ステップと、走査アドレス領域特定ステップと、相対電位検出ステップと、積分処理ステップとを有する。
特定アドレス範囲特定ステップは、感圧フィルムと、感圧フィルムの一の面に形成される複数のX電極と、感圧フィルムの他の面に形成される、複数のX電極と直交する複数のY電極とを具備するセンサシートの、複数のX電極と複数のY電極の何れか一方の電極群を一定の電圧のノードに接続しつつ、他方の電極の電位を検出して、所定の電位を検出した電極よりなる特定アドレス範囲を特定する。
走査アドレス領域特定ステップは、特定アドレス範囲特定ステップにて特定した、複数のX電極のうち、所定の電位を検出した電極群と、複数のY電極のうち、所定の電位を検出した電極群とで構成される交点を走査して、所定の相対電位を検出する交点よりなる走査アドレス領域を特定する。
相対電位検出ステップは、走査アドレス領域に含まれる交点における、X電極とY電極の相対電位を検出する。
積分処理ステップは、相対電位検出ステップにて得られた相対電位を積分処理する。
特定アドレス範囲特定ステップは、感圧フィルムと、感圧フィルムの一の面に形成される複数のX電極と、感圧フィルムの他の面に形成される、複数のX電極と直交する複数のY電極とを具備するセンサシートの、複数のX電極と複数のY電極の何れか一方の電極群を一定の電圧のノードに接続しつつ、他方の電極の電位を検出して、所定の電位を検出した電極よりなる特定アドレス範囲を特定する。
走査アドレス領域特定ステップは、特定アドレス範囲特定ステップにて特定した、複数のX電極のうち、所定の電位を検出した電極群と、複数のY電極のうち、所定の電位を検出した電極群とで構成される交点を走査して、所定の相対電位を検出する交点よりなる走査アドレス領域を特定する。
相対電位検出ステップは、走査アドレス領域に含まれる交点における、X電極とY電極の相対電位を検出する。
積分処理ステップは、相対電位検出ステップにて得られた相対電位を積分処理する。
本発明によれば、咬合分析に関し高精度で迅速かつ多岐に渡る情報を出力できる咬合測定装置と、咬合力検出方法を提供できる。
上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
[咬合測定装置の全体構成]
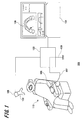
図1は、本発明の実施形態に係る、咬合測定装置101の全体構成を示すブロック図である。
咬合測定装置101は、センサシート102と、信号処理装置103と、情報処理装置104よりなる。
センサシート102は、患者110の咬合分析に用いるため、歯列をカバーするように略U字形状に形成されている。センサシート102は専用のコネクタ105を通じて信号処理装置103に接続される。
信号処理装置103は、センサシート102が出力するアナログの電圧信号をデジタルのデータに変換し、データを情報処理装置104に送出する。
情報処理装置104は周知のパソコンよりなり、信号処理装置103から受信したデータに基づき、咬合分析のための動画像データを生成し、表示部106に表示する。
センサシート102は信号処理装置103と組み合わされて、咬合力検出装置を構成する。
図1は、本発明の実施形態に係る、咬合測定装置101の全体構成を示すブロック図である。
咬合測定装置101は、センサシート102と、信号処理装置103と、情報処理装置104よりなる。
センサシート102は、患者110の咬合分析に用いるため、歯列をカバーするように略U字形状に形成されている。センサシート102は専用のコネクタ105を通じて信号処理装置103に接続される。
信号処理装置103は、センサシート102が出力するアナログの電圧信号をデジタルのデータに変換し、データを情報処理装置104に送出する。
情報処理装置104は周知のパソコンよりなり、信号処理装置103から受信したデータに基づき、咬合分析のための動画像データを生成し、表示部106に表示する。
センサシート102は信号処理装置103と組み合わされて、咬合力検出装置を構成する。
信号処理装置103には、センサシート102の出力信号から電灯線に起因するハムノイズ等を低減させるために、患者接地線107の一端が接続されている。患者接地線107の他端は患者110の手首に装着したリストバンド108に接続されている。また、信号処理装置103自体も電灯線に起因するハムノイズ等を低減させるために、装置接地線109の一端が接続されている。装置接地線109の他端は接地されている。患者接地線107及び装置接地線109は、信号処理装置103内部の回路の接地ノードと、患者110の身体と、地面の電位を共通化することで、センサシート102が出力する信号に混入するハムノイズ等を低減する。
[センサシート102の構成]
本実施形態のセンサシート102は、有機圧電フィルム201を用いた、容量性のセンサである。
図2A、図2B、図2C及び図2Dは、センサシート102の構成を説明する図である。
図2Aは、センサシート102の表側の外観図である。センサシート102は患者110の歯列を大きく包含するように略馬蹄形状に形成されている。センサシート102の表側は、センサシート102を横切る方向に、複数の電極線202が印刷されている。
図2Bは、センサシート102の裏側の外観図である。センサシート102の裏側は、センサシート102の縦方向に、複数の電極線202が印刷されている。
本実施形態のセンサシート102は、有機圧電フィルム201を用いた、容量性のセンサである。
図2A、図2B、図2C及び図2Dは、センサシート102の構成を説明する図である。
図2Aは、センサシート102の表側の外観図である。センサシート102は患者110の歯列を大きく包含するように略馬蹄形状に形成されている。センサシート102の表側は、センサシート102を横切る方向に、複数の電極線202が印刷されている。
図2Bは、センサシート102の裏側の外観図である。センサシート102の裏側は、センサシート102の縦方向に、複数の電極線202が印刷されている。
図2Cは、センサシート102の終端部分の一部拡大図である。図2Dは、センサシート102の横断面の拡大図である。
センサシート102は、中心にポリアミノ酸やPVDF(PolyVinylidene DiFluoride:ポリフッ化ビニリデン)等から成る有機圧電フィルム201を有し、この有機圧電フィルム201の表面と裏面のそれぞれに、複数の電極線202が印刷されている電極シートが貼付されている。これ以降、表側の電極シートをY電極シート203、裏側の電極シートをX電極シート204と呼ぶ。X電極シート204に形成されている電極線202と、Y電極シート203に形成されている電極線202は、90°で直交する。
X電極シート204は、ポリエチレンテレフタラート樹脂(PET樹脂)等の電気絶縁性を有する薄膜フィルム(第一保護フィルム)に、有機導電インク等で電極線202を印刷して構成される。同様に、Y電極シート203も、薄膜フィルム(第二保護フィルム)に電極線202を印刷して構成される。X電極シート204とY電極シート203の、電極線202が印刷されている側の面は、有機圧電フィルム201に接する。薄膜フィルムは、電極線202が患者110の唾液に接触しないために設けられる。
有機導電インクの印刷あるいは金属薄膜形成技術等によって構成される電極線202と、コネクタ105との接続を低価格で実現するため、センサシート102の終端部分は、図2Cに示すようにX電極シート204とY電極シート203が折り返されている。X電極シート204とY電極シート203の折り返し部分にはコネクタ105の電極と接触するランド206が形成されている。
センサシート102は、中心にポリアミノ酸やPVDF(PolyVinylidene DiFluoride:ポリフッ化ビニリデン)等から成る有機圧電フィルム201を有し、この有機圧電フィルム201の表面と裏面のそれぞれに、複数の電極線202が印刷されている電極シートが貼付されている。これ以降、表側の電極シートをY電極シート203、裏側の電極シートをX電極シート204と呼ぶ。X電極シート204に形成されている電極線202と、Y電極シート203に形成されている電極線202は、90°で直交する。
X電極シート204は、ポリエチレンテレフタラート樹脂(PET樹脂)等の電気絶縁性を有する薄膜フィルム(第一保護フィルム)に、有機導電インク等で電極線202を印刷して構成される。同様に、Y電極シート203も、薄膜フィルム(第二保護フィルム)に電極線202を印刷して構成される。X電極シート204とY電極シート203の、電極線202が印刷されている側の面は、有機圧電フィルム201に接する。薄膜フィルムは、電極線202が患者110の唾液に接触しないために設けられる。
有機導電インクの印刷あるいは金属薄膜形成技術等によって構成される電極線202と、コネクタ105との接続を低価格で実現するため、センサシート102の終端部分は、図2Cに示すようにX電極シート204とY電極シート203が折り返されている。X電極シート204とY電極シート203の折り返し部分にはコネクタ105の電極と接触するランド206が形成されている。
以上のように構成されているセンサシート102を患者110が噛むと、有機圧電フィルム201の、咬合によって歯から圧力が加わった部位には、圧力に伴う電圧が発生する。この電圧を捉え、後述するデータ処理を行うことで、咬合分析が可能になる。
また、センサシート102は有機圧電フィルム201を用いていることから、信号の検出は電圧を検出することとなる。コイル等の誘導性のセンサとは異なり、X電極シート204とY電極シート203に設けられる電極線202や配線の抵抗値を極力下げる等の必要性はない。センサシート102が出力する信号は、高インピーダンスのプリアンプを用いて増幅すればよい。
また、センサシート102は有機圧電フィルム201を用いていることから、信号の検出は電圧を検出することとなる。コイル等の誘導性のセンサとは異なり、X電極シート204とY電極シート203に設けられる電極線202や配線の抵抗値を極力下げる等の必要性はない。センサシート102が出力する信号は、高インピーダンスのプリアンプを用いて増幅すればよい。
[信号処理装置103の構成]
図3Aは、信号処理装置103のハードウェアの構成を示すブロック図である。
X電極シート204は、複数の電極線202を選択的に後続の回路に接続するアナログスイッチである、第一マルチプレクサ301に接続される。同様に、Y電極シート203は第二マルチプレクサ302に接続される。なお、紙面の都合上、図3A及び図3B中では、第一マルチプレクサ301と第二マルチプレクサ302は「MPX」と簡略表記している。
第一マルチプレクサ301と第二マルチプレクサ302の出力信号は、差動増幅器303に入力される。差動増幅器303は、第一マルチプレクサ301によって選択されたX電極シート204の電極線202と、第二マルチプレクサ302によって選択されたY電極シート203の電極線202との、相対的な電位を出力する。
なお、第一マルチプレクサ301と第二マルチプレクサ302は、複数の電極線202を選択的に出力端子に接続する他、複数の電極線202を疑似的に同電位とするないしは接地する機能も備える。この同電位化ないしは接地機能については、図4にて後述する。
図3Aは、信号処理装置103のハードウェアの構成を示すブロック図である。
X電極シート204は、複数の電極線202を選択的に後続の回路に接続するアナログスイッチである、第一マルチプレクサ301に接続される。同様に、Y電極シート203は第二マルチプレクサ302に接続される。なお、紙面の都合上、図3A及び図3B中では、第一マルチプレクサ301と第二マルチプレクサ302は「MPX」と簡略表記している。
第一マルチプレクサ301と第二マルチプレクサ302の出力信号は、差動増幅器303に入力される。差動増幅器303は、第一マルチプレクサ301によって選択されたX電極シート204の電極線202と、第二マルチプレクサ302によって選択されたY電極シート203の電極線202との、相対的な電位を出力する。
なお、第一マルチプレクサ301と第二マルチプレクサ302は、複数の電極線202を選択的に出力端子に接続する他、複数の電極線202を疑似的に同電位とするないしは接地する機能も備える。この同電位化ないしは接地機能については、図4にて後述する。
差動増幅器303の出力信号は、ノイズ除去部304に入力される。ノイズ除去部304は、オペアンプよりなる非反転増幅器305と、非反転増幅器305に接続され、理想ダイオードとしての機能を持つ第一のオペアンプ(以下「第一理想ダイオード306」)と、オペアンプよりなる反転増幅器307と、反転増幅器307に接続され、理想ダイオードとしての機能を持つ第二のオペアンプ(以下「第二理想ダイオード308」)よりなる。
第一理想ダイオード306は、非反転増幅器305によって増幅された信号の、正の電圧成分のみを出力する。
第二理想ダイオード308は、反転増幅器307によって増幅された信号の、正の電圧成分のみを出力する。
第一理想ダイオード306の出力信号は、第一サンプルホールド回路309によってサンプリングクロック毎に電圧を保持された後、第一A/D変換器310によってデジタルデータに変換される。
同様に、第二理想ダイオード308の出力信号は、第二サンプルホールド回路311によってサンプリングクロック毎に電圧を保持された後、第二A/D変換器312によってデジタルデータに変換される。なお、紙面の都合上、図3A及び図3B中では、第一サンプルホールド回路309と第二サンプルホールド回路311は「S/H」と、第一A/D変換器310と第二A/D変換器312は「A/D」と、それぞれ簡略表記している。
すなわち、差動増幅器303から出力される交流の信号の、正方向の信号成分は第一A/D変換器310によって数値化され、負方向の信号成分は第二A/D変換器312によって数値化される。
第一理想ダイオード306は、非反転増幅器305によって増幅された信号の、正の電圧成分のみを出力する。
第二理想ダイオード308は、反転増幅器307によって増幅された信号の、正の電圧成分のみを出力する。
第一理想ダイオード306の出力信号は、第一サンプルホールド回路309によってサンプリングクロック毎に電圧を保持された後、第一A/D変換器310によってデジタルデータに変換される。
同様に、第二理想ダイオード308の出力信号は、第二サンプルホールド回路311によってサンプリングクロック毎に電圧を保持された後、第二A/D変換器312によってデジタルデータに変換される。なお、紙面の都合上、図3A及び図3B中では、第一サンプルホールド回路309と第二サンプルホールド回路311は「S/H」と、第一A/D変換器310と第二A/D変換器312は「A/D」と、それぞれ簡略表記している。
すなわち、差動増幅器303から出力される交流の信号の、正方向の信号成分は第一A/D変換器310によって数値化され、負方向の信号成分は第二A/D変換器312によって数値化される。
第一A/D変換器310の出力データと、第二A/D変換器312の出力データは、バス313に供給される。バス313には、CPU314、ROM315、RAM316、そして情報処理装置104に接続するためのUSBインターフェース317(図3A及び図3B中では「USB I/F」と簡略表記)が接続されている。
CPU314、ROM315、RAM316、そしてこれらが接続されるバス313は、周知のマイコンを構成する。
更に、バス313には、第一マルチプレクサ301と第二マルチプレクサ302を制御する制御線317aと、第一サンプルホールド回路309と第二サンプルホールド回路311を制御する制御線317bと、第一A/D変換器310と第二A/D変換器312を制御する制御線317cが接続されている。制御線317cは第一A/D変換器310と第二A/D変換器312に一定周期のサンプリングクロックを供給する。なお、サンプルホールド回路及びA/D変換器は第一理想ダイオード306及び第二理想ダイオード308の出力信号のそれぞれに設けたが、第一理想ダイオード306及び第二理想ダイオード308の出力に加算器を設けることによって、これらを一つにすることもできる。この場合、第一理想ダイオード306及び第二理想ダイオード308の出力をコンパレータに与えて、符号を検出する必要がある。
CPU314、ROM315、RAM316、そしてこれらが接続されるバス313は、周知のマイコンを構成する。
更に、バス313には、第一マルチプレクサ301と第二マルチプレクサ302を制御する制御線317aと、第一サンプルホールド回路309と第二サンプルホールド回路311を制御する制御線317bと、第一A/D変換器310と第二A/D変換器312を制御する制御線317cが接続されている。制御線317cは第一A/D変換器310と第二A/D変換器312に一定周期のサンプリングクロックを供給する。なお、サンプルホールド回路及びA/D変換器は第一理想ダイオード306及び第二理想ダイオード308の出力信号のそれぞれに設けたが、第一理想ダイオード306及び第二理想ダイオード308の出力に加算器を設けることによって、これらを一つにすることもできる。この場合、第一理想ダイオード306及び第二理想ダイオード308の出力をコンパレータに与えて、符号を検出する必要がある。
図3Bは、信号処理装置103のソフトウェアの機能を示すブロック図である。
図3Aと比較して判るように、信号処理装置103は信号処理回路を有するマイコンである。そして、マイコンのソフトウェアの機能は、マルチプレクサ、サンプルホールド回路、A/D変換器のタイミング制御と、後述するアドレス処理と、USBインターフェース317を通じた情報処理装置104とのデータの入出力を制御する制御部318を構成する。制御部318は、咬合力を測定する処理の過程で、RAM316内に走査アドレステーブル319を作成する。走査アドレステーブル319の詳細は図4及び図5にて後述する。
図3Aと比較して判るように、信号処理装置103は信号処理回路を有するマイコンである。そして、マイコンのソフトウェアの機能は、マルチプレクサ、サンプルホールド回路、A/D変換器のタイミング制御と、後述するアドレス処理と、USBインターフェース317を通じた情報処理装置104とのデータの入出力を制御する制御部318を構成する。制御部318は、咬合力を測定する処理の過程で、RAM316内に走査アドレステーブル319を作成する。走査アドレステーブル319の詳細は図4及び図5にて後述する。
[信号処理装置103の動作]
信号処理装置103は、センサシート102が出力する信号を、ノイズを除去しつつできるだけ忠実にA/D変換し、データを情報処理装置104に出力する。信号処理装置103は、咬合力を二次元のセンサシート102で検出するため、X軸方向とY軸方向に存在する多数の電極線202をそれぞれ連続的に選択して、電極線202同士の相対電位を計測しなければならない。この動作は、タッチパネル等における、センサ面をスキャンする動作に類似する。
信号処理装置103は、センサシート102が出力する信号を、ノイズを除去しつつできるだけ忠実にA/D変換し、データを情報処理装置104に出力する。信号処理装置103は、咬合力を二次元のセンサシート102で検出するため、X軸方向とY軸方向に存在する多数の電極線202をそれぞれ連続的に選択して、電極線202同士の相対電位を計測しなければならない。この動作は、タッチパネル等における、センサ面をスキャンする動作に類似する。
X電極シート204とY電極シート203に電極線202を細密に配置すれば、分解能が向上する反面、センサシート102全面のスキャンに時間がかかってしまう。しかし、タッチパネル等とは異なり、本実施形態のセンサシート102は歯の咬合力とその位置を検出するものである。そして、検出対象である歯列はタッチパネルが検出する対象である指とは異なり、検出面方向に大きく移動するものではない。また、健常者であっても咬合箇所は歯列全体の中の30箇所未満であることが知られている。したがって、予めスキャンする範囲を咬合箇所近傍の位置に限定することで、スキャンに要する時間を大幅に短縮できる。
図4は、信号処理装置103の動作の流れを示すフローチャートである。なお、これ以降、X電極シート204に印刷されている複数の電極線202をX電極、Y電極シート203に印刷されている複数の電極線202をY電極と略す。
処理を開始すると(S401)、先ず、制御部318は第一マルチプレクサ301を制御して、全てのX電極を接地する(S402)。そして、制御部318は第二マルチプレクサ302を制御して、全てのY電極を接地する(S403)。この時点で、全てのX電極とY電極に帯電している余計な電荷が放電される。
次に、制御部318は再び第一マルチプレクサ301を制御して、X電極のみ接地を解除した後、全てのX電極を順に選択(走査)する。そして、所定電圧以上の電圧を検出したX電極を特定し、そのX電極のアドレスをRAM316に記憶する(S404)。
続いて、制御部318は第一マルチプレクサ301を制御して、全てのX電極を接地する(S405)。次に、制御部318は第二マルチプレクサ302を制御して、全てのY電極を順に選択し、所定電圧以上の電圧を検出したY電極を特定し、そのY電極のアドレスをRAM316に記憶する(S406)。
処理を開始すると(S401)、先ず、制御部318は第一マルチプレクサ301を制御して、全てのX電極を接地する(S402)。そして、制御部318は第二マルチプレクサ302を制御して、全てのY電極を接地する(S403)。この時点で、全てのX電極とY電極に帯電している余計な電荷が放電される。
次に、制御部318は再び第一マルチプレクサ301を制御して、X電極のみ接地を解除した後、全てのX電極を順に選択(走査)する。そして、所定電圧以上の電圧を検出したX電極を特定し、そのX電極のアドレスをRAM316に記憶する(S404)。
続いて、制御部318は第一マルチプレクサ301を制御して、全てのX電極を接地する(S405)。次に、制御部318は第二マルチプレクサ302を制御して、全てのY電極を順に選択し、所定電圧以上の電圧を検出したY電極を特定し、そのY電極のアドレスをRAM316に記憶する(S406)。
ここで一旦、図5を参照して、ステップS403からステップS407迄の制御部318の動作を説明する。
図5A、図5B及び図5Cは、制御部318がセンサシート102を走査する範囲を特定する動作の流れを説明する概念図である。
図5Aは、制御部318が把握するセンサシート102の全アドレス範囲501を示す概念図である。図5Aにおいて、制御部318が把握するセンサシート102のアドレスの範囲は、歯列502を大きく囲む長方形形状である。この全アドレス範囲501は、実際にはX電極とY電極が存在しないアドレスも含む。図2にて説明したように、センサシート102は歯列502を大きく包含するように略馬蹄形状に形成されている。この、略馬蹄形状を含む長方形の範囲が、全アドレス範囲501である。この全アドレス範囲501に存在するX電極とY電極の交点を一つずつ順に走査すると、非常に時間が掛かる。また、走査時間を短縮しようとすると、回路規模や電子デバイスに高性能なものを必要とし、コスト高を招く。
図5A、図5B及び図5Cは、制御部318がセンサシート102を走査する範囲を特定する動作の流れを説明する概念図である。
図5Aは、制御部318が把握するセンサシート102の全アドレス範囲501を示す概念図である。図5Aにおいて、制御部318が把握するセンサシート102のアドレスの範囲は、歯列502を大きく囲む長方形形状である。この全アドレス範囲501は、実際にはX電極とY電極が存在しないアドレスも含む。図2にて説明したように、センサシート102は歯列502を大きく包含するように略馬蹄形状に形成されている。この、略馬蹄形状を含む長方形の範囲が、全アドレス範囲501である。この全アドレス範囲501に存在するX電極とY電極の交点を一つずつ順に走査すると、非常に時間が掛かる。また、走査時間を短縮しようとすると、回路規模や電子デバイスに高性能なものを必要とし、コスト高を招く。
そこで、歯科技工士等は患者110にセンサシート102を咥えさせた上で、「歯をカチカチして下さい」等と告げて、咬合をお願いする。患者110がセンサシート102を噛むと、最初の咬合によって、歯列502がセンサシート102に当たった箇所に存在するX電極とY電極に電圧が発生する。この、電圧が発生したX電極を特定する作業が、ステップS403とS404であり、電圧が発生したY電極を特定する作業が、ステップS405とS406である。
図5Bは、ステップS406の時点で制御部318が把握した、信号を検出したX電極とY電極よりなる特定アドレス範囲503a、503b、503c及び503dを示す概念図である。図5Bにおいて、制御部318がステップS406の時点において把握する特定アドレス範囲503a、503b、503c及び503dは、歯列502において歯と歯が噛み合った箇所を含む長方形形状である。
図5Bは、ステップS406の時点で制御部318が把握した、信号を検出したX電極とY電極よりなる特定アドレス範囲503a、503b、503c及び503dを示す概念図である。図5Bにおいて、制御部318がステップS406の時点において把握する特定アドレス範囲503a、503b、503c及び503dは、歯列502において歯と歯が噛み合った箇所を含む長方形形状である。
ステップS406の時点で、制御部318は信号を検出したX電極とY電極のアドレスを把握できている。しかし、信号を検出したX電極とY電極のアドレスだけでは、歯列502を含む長方形形状の領域(特定アドレス範囲503a、503b、503c及び503d)を特定したに過ぎず、図5Bを見て判るように、特定アドレス範囲503a、503b、503c及び503dは、歯と歯が噛み合っていない無駄な領域を多く含む。例えば、特定アドレス範囲503dは、実際には歯と歯が噛み合っていないが、特定アドレス範囲503aと503cに歯と歯が噛みあった箇所があるために、制御部318によって形成された特定アドレス範囲である。
そこで、今度は特定アドレス範囲503a、503b、503c及び503dに含まれるX電極とY電極の交点を順に走査して、信号を検出した交点のアドレスを特定する。そして、特定したアドレスをRAM316内に格納し、走査アドレステーブル319を作成する(図4のステップS407)。その際、患者110が複数回センサシート102を咬合する時にセンサシート102と歯列502との相対的な位置がずれる可能性を考慮して、信号を検出した交点を中心に、上下左右に数個分の、交点のマージンを含める。
図5Cは、ステップS407の時点で制御部318が作成する走査アドレス領域504a、504b及び504cを示す概念図である。走査アドレス領域504a、504b及び504cは、歯列502の、咬合によって歯とセンサシート102が当接した箇所を取り巻くように形成される。すなわち、走査アドレス領域504a、504b及び504cは、前述の「咬合箇所近傍の位置」である。走査アドレス領域504a、504b及び504cに含まれる、X電極とY電極の交点のアドレスが、走査アドレステーブル319の要素である。ステップS407の時点で、特定アドレス範囲503dに含まれていた交点は、走査アドレス領域からは除外される。
そこで、今度は特定アドレス範囲503a、503b、503c及び503dに含まれるX電極とY電極の交点を順に走査して、信号を検出した交点のアドレスを特定する。そして、特定したアドレスをRAM316内に格納し、走査アドレステーブル319を作成する(図4のステップS407)。その際、患者110が複数回センサシート102を咬合する時にセンサシート102と歯列502との相対的な位置がずれる可能性を考慮して、信号を検出した交点を中心に、上下左右に数個分の、交点のマージンを含める。
図5Cは、ステップS407の時点で制御部318が作成する走査アドレス領域504a、504b及び504cを示す概念図である。走査アドレス領域504a、504b及び504cは、歯列502の、咬合によって歯とセンサシート102が当接した箇所を取り巻くように形成される。すなわち、走査アドレス領域504a、504b及び504cは、前述の「咬合箇所近傍の位置」である。走査アドレス領域504a、504b及び504cに含まれる、X電極とY電極の交点のアドレスが、走査アドレステーブル319の要素である。ステップS407の時点で、特定アドレス範囲503dに含まれていた交点は、走査アドレス領域からは除外される。
再度図4を参照して、フローチャートの説明を続ける。
患者110がセンサシート102を1回噛んだことに呼応して、制御部318はステップS403からS407にかけて、走査アドレステーブル319を作成した。これ以降、制御部318は走査アドレステーブル319に含まれるアドレスのみ走査して、X電極とY電極の相対電位を検出し、データを出力する(S408)。この動作は、上位装置である情報処理装置104から停止指令が来るまで繰り返され(S409のNO)、停止指令が来たら(S409のYES)、制御部318は一連の処理を終了する(S410)。なお、こうした動作の変形として市販のマルチプレクサの構成により、一括して同電位とせずに幾つかのグループに分けて類似の走査を繰り返して行ってもよい。
以上の説明で明らかなように、本実施形態の信号処理装置103は、センサシート102を患者110が噛んだ際の、最初の咬合にて走査アドレステーブル319を作成し、二回目以降の咬合を検出して咬合力に起因するデータを出力する。
患者110がセンサシート102を1回噛んだことに呼応して、制御部318はステップS403からS407にかけて、走査アドレステーブル319を作成した。これ以降、制御部318は走査アドレステーブル319に含まれるアドレスのみ走査して、X電極とY電極の相対電位を検出し、データを出力する(S408)。この動作は、上位装置である情報処理装置104から停止指令が来るまで繰り返され(S409のNO)、停止指令が来たら(S409のYES)、制御部318は一連の処理を終了する(S410)。なお、こうした動作の変形として市販のマルチプレクサの構成により、一括して同電位とせずに幾つかのグループに分けて類似の走査を繰り返して行ってもよい。
以上の説明で明らかなように、本実施形態の信号処理装置103は、センサシート102を患者110が噛んだ際の、最初の咬合にて走査アドレステーブル319を作成し、二回目以降の咬合を検出して咬合力に起因するデータを出力する。
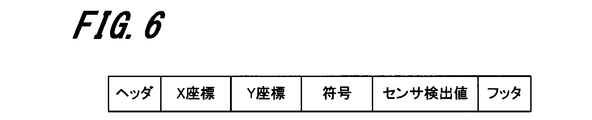
図6は、信号処理装置103が情報処理装置104へ出力するデータフレームの形式の一例を示す図である。
データフレームはヘッダから始まり、X座標、Y座標、符号、センサ検出値、そしてフッタで構成される。これらフィールドは全て固定ビット長であることが望ましい。そうでない場合は、フィールド同士を区切るフィールドセパレータが必要になる。
ヘッダとフッタはデータフレーム同士を識別するセパレータである。バイナリであれば特定のビットパターンであり、テキストであれば改行コード等が該当する。
X座標とY座標は、それぞれのアドレス情報である。
符号は、後続するセンサ検出値の正負の符号を示す情報である。センサ検出値は、第一A/D変換器310又は第二A/D変換器312が出力したデータである。符号が正を示す情報である場合、センサ検出値は第一A/D変換器310の値を示し、符号が負を示す情報である場合、センサ検出値は第二A/D変換器312の値を示す。
このデータフレームの形式は、バイナリであってもテキストであってもよいが、情報の冗長度を抑えるためにはバイナリ形式が望ましい。
データフレームはヘッダから始まり、X座標、Y座標、符号、センサ検出値、そしてフッタで構成される。これらフィールドは全て固定ビット長であることが望ましい。そうでない場合は、フィールド同士を区切るフィールドセパレータが必要になる。
ヘッダとフッタはデータフレーム同士を識別するセパレータである。バイナリであれば特定のビットパターンであり、テキストであれば改行コード等が該当する。
X座標とY座標は、それぞれのアドレス情報である。
符号は、後続するセンサ検出値の正負の符号を示す情報である。センサ検出値は、第一A/D変換器310又は第二A/D変換器312が出力したデータである。符号が正を示す情報である場合、センサ検出値は第一A/D変換器310の値を示し、符号が負を示す情報である場合、センサ検出値は第二A/D変換器312の値を示す。
このデータフレームの形式は、バイナリであってもテキストであってもよいが、情報の冗長度を抑えるためにはバイナリ形式が望ましい。
[情報処理装置104の構成]
図7Aは、情報処理装置104のハードウェアの構成を示すブロック図である。一般的なパソコンである情報処理装置104は、CPU701、ROM702、RAM703、ハードディスク装置等の不揮発性ストレージ704、キーボード等の操作部705、ディスプレイである表示部106と、信号処理装置103に接続されるUSBインターフェース706が、バス313に接続されて構成される。不揮発性ストレージ704には、パソコンを本実施形態の情報処理装置104として稼働させるためのプログラムが格納されている。
図7Aは、情報処理装置104のハードウェアの構成を示すブロック図である。一般的なパソコンである情報処理装置104は、CPU701、ROM702、RAM703、ハードディスク装置等の不揮発性ストレージ704、キーボード等の操作部705、ディスプレイである表示部106と、信号処理装置103に接続されるUSBインターフェース706が、バス313に接続されて構成される。不揮発性ストレージ704には、パソコンを本実施形態の情報処理装置104として稼働させるためのプログラムが格納されている。
図7Bは、情報処理装置104のソフトウェアの機能を示すブロック図である。
信号処理装置103が出力するデータは、USBインターフェース706を通じて不揮発性ストレージ704に形成されるファイルシステム707に供給される。ファイルシステム707は、制御部708の制御に従って、信号処理装置103から受信したデータに時間情報を付加して、一旦生データファイル709に格納する。
生データファイル709が生成されたら、制御部708は次に温度補償処理部710を起動する。温度補償処理部710は、生データファイル709を読み込み、温度補償演算処理を行う。
温度補償処理部710が生データファイル709の温度補償演算処理を終えたら、制御部708は次に積分演算処理部711を起動する。積分演算処理部711は、温度補償演算処理されたデータを読み込み、積分演算処理を行う。
積分演算処理部711がデータの積分演算処理を終えたら、制御部708は次に動画生成処理部712を起動する。動画生成処理部712は、積分演算処理されたデータと生データファイル709に含まれているアドレス情報(X座標及びY座標)を読み込み、ビットマップに展開し、更に咬合力の強さに応じた色分けを施すかあるいは棒グラフ化を施して、動画ファイル713をファイルシステム707に作成する。動画生成処理部712は、咬合力に応じた色分けを施すことで、周知のサーモグラフィに類似する、時間と共に変動する咬合力の変化を色彩で表す動画を生成する。
信号処理装置103が出力するデータは、USBインターフェース706を通じて不揮発性ストレージ704に形成されるファイルシステム707に供給される。ファイルシステム707は、制御部708の制御に従って、信号処理装置103から受信したデータに時間情報を付加して、一旦生データファイル709に格納する。
生データファイル709が生成されたら、制御部708は次に温度補償処理部710を起動する。温度補償処理部710は、生データファイル709を読み込み、温度補償演算処理を行う。
温度補償処理部710が生データファイル709の温度補償演算処理を終えたら、制御部708は次に積分演算処理部711を起動する。積分演算処理部711は、温度補償演算処理されたデータを読み込み、積分演算処理を行う。
積分演算処理部711がデータの積分演算処理を終えたら、制御部708は次に動画生成処理部712を起動する。動画生成処理部712は、積分演算処理されたデータと生データファイル709に含まれているアドレス情報(X座標及びY座標)を読み込み、ビットマップに展開し、更に咬合力の強さに応じた色分けを施すかあるいは棒グラフ化を施して、動画ファイル713をファイルシステム707に作成する。動画生成処理部712は、咬合力に応じた色分けを施すことで、周知のサーモグラフィに類似する、時間と共に変動する咬合力の変化を色彩で表す動画を生成する。
動画ファイル713が生成されたら、情報処理装置104は表示部106に動画を再生できる。動画再生処理部714は、操作部705の操作に従って、動画ファイル713をデコードし、再生する。
画像合成処理部715は、動画再生処理部714が出力する動画データと、ファイルシステム707に予め格納されているチェックバイト画像ファイル716を重ね合わせて、表示部106に表示する。チェックバイトとは、温めたシリコン印象材を患者110に噛んで貰い、歯型をシリコン印象材に形成させることを指す。チェックバイト画像とは、その歯型の画像である。
画像合成処理部715は、動画再生処理部714が出力する動画データと、ファイルシステム707に予め格納されているチェックバイト画像ファイル716を重ね合わせて、表示部106に表示する。チェックバイトとは、温めたシリコン印象材を患者110に噛んで貰い、歯型をシリコン印象材に形成させることを指す。チェックバイト画像とは、その歯型の画像である。
有機圧電フィルム201を有するセンサシート102が出力する信号には、温度に依存するオフセットノイズが含まれていることがある。このような温度依存成分を除去するために、走査アドレステーブル319に格納されるアドレスのうち、圧力が加わっていない交点のアドレスの値を参照して、圧力が加わっている交点のアドレスの値から減算することで、温度依存成分を除去できる。このために、温度補償処理部710が設けられている。
また、有機圧電フィルム201を有するセンサシート102は、センサシート102に加わった圧力の変化を、電圧信号として出力する。すなわち、センサシート102は圧力の微分信号を出力する。このため、咬合力を表示部106に表示するためには、センサシート102から得られたデータに対し、積分演算を施さなければならない。このために、情報処理装置104には積分演算処理部711が設けられている。
温度補償処理と積分演算処理は、咬合力を検出した全ての交点に対して行わなければならない。図4及び図5で説明した走査アドレステーブル319の生成は、この演算処理をできるだけ少なくするためにも必要である。
また、有機圧電フィルム201を有するセンサシート102は、センサシート102に加わった圧力の変化を、電圧信号として出力する。すなわち、センサシート102は圧力の微分信号を出力する。このため、咬合力を表示部106に表示するためには、センサシート102から得られたデータに対し、積分演算を施さなければならない。このために、情報処理装置104には積分演算処理部711が設けられている。
温度補償処理と積分演算処理は、咬合力を検出した全ての交点に対して行わなければならない。図4及び図5で説明した走査アドレステーブル319の生成は、この演算処理をできるだけ少なくするためにも必要である。
[積分演算処理について]
図8Aは、咬合力の時間軸上の変化を示す、グラフ形式の概念図である。図8Bは、センサシート102から検出される信号の、時間軸上の変化を示す、グラフ形式の概念図である。図8Aと図8Bのグラフは、時間軸上で一致する。図8Aと図8Bは、患者110がセンサシート102を一定の最大咬合力で噛みしめた場合を想定したグラフである。
前述の通り、表示部106に表示するための咬合力を算出するには、センサシート102から得られた生のデータに対し、積分演算を施さなければならない。積分演算処理部711の積分演算処理は、患者110が歯を噛みしめて(加圧)から離す(減圧)迄の期間を1サイクルと定義して、この1サイクル単位で行う。特に患者110が咬合について意識をしない限り、1サイクルは概ね0.2秒から数秒程度である。
図8Aは、咬合力の時間軸上の変化を示す、グラフ形式の概念図である。図8Bは、センサシート102から検出される信号の、時間軸上の変化を示す、グラフ形式の概念図である。図8Aと図8Bのグラフは、時間軸上で一致する。図8Aと図8Bは、患者110がセンサシート102を一定の最大咬合力で噛みしめた場合を想定したグラフである。
前述の通り、表示部106に表示するための咬合力を算出するには、センサシート102から得られた生のデータに対し、積分演算を施さなければならない。積分演算処理部711の積分演算処理は、患者110が歯を噛みしめて(加圧)から離す(減圧)迄の期間を1サイクルと定義して、この1サイクル単位で行う。特に患者110が咬合について意識をしない限り、1サイクルは概ね0.2秒から数秒程度である。
患者110がセンサシート102を噛むと、咬合力は、図8Aに示すような変化を示す。歯を噛みしめる際の、咬合力の立ち上がりは、時間軸上で大きなばらつきを示す。このばらつきT801は、図8Bに示すように、センサシート102から出力される電圧信号の、電圧の高低E802になって現れる。このため、センサシート102から得られる信号の立ち上がりを基準に積分演算を行うと、大きな誤差を含む虞がある。そこで本発明では、あらかじめ走査範囲を限定することで1サイクルの期間中に何度も高速に咬合個所の走査を行うようにした。そして走査の度に得られた同一アドレスのA/D変換出力を加算することにより、正確に咬合力を得ることができる。例えば第一A/D変換器310及び第二A/D変換器312に用いるサンプリングクロックを1KHz以上に、良好な実施例では1MHz以上の一定周波数に設定すれば、1サイクルの期間中にセンサシート102から得られる信号の変化を高い精度で検出できる。
患者110がセンサシート102をゆっくり噛んだ場合、すなわち加圧時のセンサ出力の立ち上がり時間が長い場合は、積分誤差が大きくなる。一方、噛みしめた歯を離す際の、咬合力の立ち下がりは、時間軸上におけるばらつきが少ない(T803)。このため、図8Bに示すように、噛みしめた歯を離した際の、センサシート102から出力される電圧信号は、あまり電圧がばらつかない(E804)。すなわち、咬合力の最大値は、センサシート102の電圧信号の、負方向の信号から算出することで、比較的誤差の少ない積分演算処理が期待できる。このように、積分演算処理において咬合力の減圧時点の値を基に演算することから、積分演算処理は時間軸を遡る演算処理になる。このため、信号処理装置103が出力するデータは、一旦、生データファイル709としてファイル化する必要がある。
なお、咬合力の把握は加圧時と解放時のセンサ出力を用いてもよい。この時は、前記1サイクル期間中に複数回走査して得た信号をA/D変換したデジタル値を積算することで積分動作がなされる。積分して得られた値はセンサシート102に与えた加圧量が同じなら、積算値もほぼ同じ値となる。また1サイクル内の走査回数が多ければ多いほど、波形によらず咬合力に比例した、正確な積分値が得られる。なお、1サイクル内の走査回数は、走査アドレス領域の面積に反比例する。
なお、咬合力の把握は加圧時と解放時のセンサ出力を用いてもよい。この時は、前記1サイクル期間中に複数回走査して得た信号をA/D変換したデジタル値を積算することで積分動作がなされる。積分して得られた値はセンサシート102に与えた加圧量が同じなら、積算値もほぼ同じ値となる。また1サイクル内の走査回数が多ければ多いほど、波形によらず咬合力に比例した、正確な積分値が得られる。なお、1サイクル内の走査回数は、走査アドレス領域の面積に反比例する。
[表示画面]
図9は、表示部106に表示される表示画像の一例を示す図である。
画面901には、動画表示領域902と、咬合力表示領域903と、停止ボタン904と、再生又は一時停止ボタン905と、再生速度指示スケール906が表示されている。また、画面901の一部には患者110の氏名等を示す患者情報P907と、最大咬合力情報P908が表示されている。咬合力表示領域903には再生ポインタP911が表示されており、この再生ポインタP911を図示しないマウス等のポインティングデバイスで移動させることで、再生位置を変更できる。
図9は、表示部106に表示される表示画像の一例を示す図である。
画面901には、動画表示領域902と、咬合力表示領域903と、停止ボタン904と、再生又は一時停止ボタン905と、再生速度指示スケール906が表示されている。また、画面901の一部には患者110の氏名等を示す患者情報P907と、最大咬合力情報P908が表示されている。咬合力表示領域903には再生ポインタP911が表示されており、この再生ポインタP911を図示しないマウス等のポインティングデバイスで移動させることで、再生位置を変更できる。
咬合力表示領域903には、チェックバイト画像の上に、咬合力が発生している箇所が色分けされて表示あるいは咬合力に応じた棒グラフとして表示されている。更に、咬合の際に最初にセンサシート102に咬合圧力が発生した箇所P909と、咬合力表示領域903に表示する箇所P910がマーキング表示されている。
動画生成処理部712は、積分演算処理部711から出力されたデータを基に画像ファイルを作成する際、咬合力の強弱に応じて色分け処理を行う。例えば、周知の等高線と同様の、咬合力の弱い順から、青→緑→黄緑→黄→橙→赤というような色分けを、咬合力が生じている交点に対して施す。そして、画像合成処理部715はチェックバイト画像に動画再生処理部714が出力する動画データをオーバーラップさせる。すると、歯のどの部分で噛み合わせが生じたのか、そして咬合力はどの程度なのかが、一目瞭然で判る。
動画生成処理部712は、積分演算処理部711から出力されたデータを基に画像ファイルを作成する際、咬合力の強弱に応じて色分け処理を行う。例えば、周知の等高線と同様の、咬合力の弱い順から、青→緑→黄緑→黄→橙→赤というような色分けを、咬合力が生じている交点に対して施す。そして、画像合成処理部715はチェックバイト画像に動画再生処理部714が出力する動画データをオーバーラップさせる。すると、歯のどの部分で噛み合わせが生じたのか、そして咬合力はどの程度なのかが、一目瞭然で判る。
更に、動画再生処理部714は、動画ファイル713又は生データファイル709を読み込み、スキャンして、時間軸上で最初に信号の変化が現れた交点を特定する。この特定した交点が、噛み合わせの際、最初に歯が当たった箇所であるので、動画再生処理部714は動画表示領域902にこの交点をマーキング表示する。
また、歯科技工士等が患者110に対して「ぐっと強く噛んで下さい」と指示する。すると、強い咬合力がデータとなって生データファイル709に現れる。動画再生処理部714は同一時間軸上の、咬合力が発生している全ての交点の値を積算して、最大値を示す時間の値を、最大咬合力として動画表示領域902の横に表示する。
上述の実施形態の他、以下のような応用例(a)乃至(d)が考えられる。
(a)電極線202の形成方法は、上述のX電極シート204及びY電極シート203のように、カバーとなるシートに印刷処理を施す方法に限られない。有機圧電フィルム201に対して有機導電インクにて電極線202を印刷してもよい。この場合、ランド206は有機圧電フィルム201上に形成されるので、図2CのようにX電極シート204及びY電極シート203を折り返す必要がなく、有機圧電フィルム201のランド206が形成された部分だけ露出する構成にすればよい。
また、電極線202を形成する方法は、スパッターによる薄膜形成や銅箔等の金属箔を貼付してもよい。
(a)電極線202の形成方法は、上述のX電極シート204及びY電極シート203のように、カバーとなるシートに印刷処理を施す方法に限られない。有機圧電フィルム201に対して有機導電インクにて電極線202を印刷してもよい。この場合、ランド206は有機圧電フィルム201上に形成されるので、図2CのようにX電極シート204及びY電極シート203を折り返す必要がなく、有機圧電フィルム201のランド206が形成された部分だけ露出する構成にすればよい。
また、電極線202を形成する方法は、スパッターによる薄膜形成や銅箔等の金属箔を貼付してもよい。
(b)信号処理装置103が不揮発性ストレージ704を備え、生データファイル709を信号処理装置103が生成してもよい。この場合、図6に示したデータフレームを定めて、信号処理装置103と情報処理装置104が通信を行う必要がなくなり、信号処理装置103は情報処理装置104に対する、生データファイル709が格納されるUSBストレージ機能を提供すればよい。
(c)センサシート102の分解能を向上させるために電極線202の密度を上げることは、物理的限界がある。また、コストも上昇する。コストを抑えつつ咬合力検出装置の分解能を向上させるために、隣接する電極線202の間に仮想的な電極線202があるものとする、補間演算を採用してもよい。また、咬合力を計測できない領域を極力少なくするために、電極線202の幅をできるだけ広く確保して、同一平面上の電極間の隙間を少なくすることが好ましい。
(d)患者110からチェックバイト画像を撮影していない場合、チェックバイト画像ファイル716に代えて、標準的な歯列のサンプル画像データを動画表示領域902にオーバーラップ表示してもよい。またチェックバイト画像がある場合にはチェックバイト画像と咬合箇所の位置合わせは咬合した歯列上のアドレスの少なくとも2か所を用いてマウスによる位置合わせ操作をすれば容易に合致させることができる。
(e)図4のステップS402及びS403において、X電極シート204及びY電極シート203に印刷されている複数の電極線202に帯電している余計な電荷を放電するために、全てのX電極とY電極を接地した。この、複数の電極線202に帯電している電荷を逃がす対象は、必ずしも接地電位でなくてもよい。例えば、信号処理装置103を単一電源で構成する場合、オペアンプがセンサシート102から生じる電圧信号を検出するために、抵抗等で分圧して、単一電源の半分の電位(中点電圧)を得ることが多い。このような場合、電極線202は中点電圧のノードに接続して、電荷を逃がす。またその際、患者110の人体は接地電位であっても構わない。また、中点電圧に限らず、電極線202の電荷を放電するノードは、任意の、一定の電圧に固定されたノードであればよい。
(f)本実施形態のセンサシート102は有機圧電材料を用いた容量性のセンサであったが、抵抗膜を用いてもよい。例えば、特開2013-48680に開示される技術にも適用できる。つまり、マトリクス形式のあらゆるセンサに適用できる。抵抗膜を用いたセンサシート102を採用する場合、咬合力と電流または電圧信号から検出される抵抗値との関係は線形性を有するので、情報処理装置104の積分演算処理部711は不要になる。
本実施形態では、咬合測定装置101と、これを構成するセンサシート102と信号処理装置103よりなる咬合力検出装置、そして情報処理装置104を開示した。以上に開示した本実施形態には、以下の(1)乃至(7)に示す作用効果が認められる。
(1)有機圧電フィルム201の両面に、複数の電極線202を設けたX電極シート204とY電極シート203を設けることで、従来技術と比べて低コストで高分解能の、咬合力を検出するためのセンサシート102を実現できる。このセンサシート102は従来技術と比べて極めて安価に製造できるので、使い捨てが可能であり、故に清潔である。
(2)有機圧電フィルム201の両面に貼付されたX電極シート204とY電極シート203の、それぞれの電極線202を選択するマルチプレクサを通じて、差動増幅器303で電圧を検出することで、咬合力に起因する信号を的確に検出できる、咬合力検出装置を実現できる。
(3)患者110に二回以上センサシート102を噛んで貰い、第一回目の咬合で、センサシート102に咬合力に起因する圧力が発生している箇所を特定し、第二回目以降の咬合で咬合力を検出することで、最小限のデータ量で精緻に測定できる、咬合力検出装置を実現できる。
(1)有機圧電フィルム201の両面に、複数の電極線202を設けたX電極シート204とY電極シート203を設けることで、従来技術と比べて低コストで高分解能の、咬合力を検出するためのセンサシート102を実現できる。このセンサシート102は従来技術と比べて極めて安価に製造できるので、使い捨てが可能であり、故に清潔である。
(2)有機圧電フィルム201の両面に貼付されたX電極シート204とY電極シート203の、それぞれの電極線202を選択するマルチプレクサを通じて、差動増幅器303で電圧を検出することで、咬合力に起因する信号を的確に検出できる、咬合力検出装置を実現できる。
(3)患者110に二回以上センサシート102を噛んで貰い、第一回目の咬合で、センサシート102に咬合力に起因する圧力が発生している箇所を特定し、第二回目以降の咬合で咬合力を検出することで、最小限のデータ量で精緻に測定できる、咬合力検出装置を実現できる。
(4)情報処理装置104は、有機圧電フィルム201を用いたセンサシート102を有する咬合力検出装置が出力した、交点毎のアドレス情報と、咬合力の変化を示す信号に基づくデータを含む生データに対し、交点毎に積分演算処理を行って、咬合力のデータを作成する。積分演算処理を有することで、時間軸上の咬合力を精緻に測定できる、情報処理装置104を実現できる。
(5)情報処理装置104は、咬合力のデータを作成した後、交点毎のアドレスを基に画像マッピング処理を行い、咬合力の動画を作成し、これを表示部106に表示する。画像マッピング処理を有することで、歯列全体における咬合力の発生箇所と変化を一目で把握できる、情報処理装置104を実現できる。もちろんこの際に静止画を選択することもできる。
(6)情報処理装置104は、咬合力の動画を作成した後、咬合力の動画をチェックバイト画像とオーバーラップ表示する。オーバーラップ表示を行うことで、歯列全体における咬合力の発生箇所と変化を一目で把握できる、情報処理装置104を実現できる。
(7)情報処理装置104は、咬合力の動画を作成した後、歯列中の、咬合力が最初に発生した箇所をマーキング表示する。マーキング表示を行うことで、歯列全体のうち最も突出している箇所を一目で把握できる、情報処理装置104を実現できる。
(5)情報処理装置104は、咬合力のデータを作成した後、交点毎のアドレスを基に画像マッピング処理を行い、咬合力の動画を作成し、これを表示部106に表示する。画像マッピング処理を有することで、歯列全体における咬合力の発生箇所と変化を一目で把握できる、情報処理装置104を実現できる。もちろんこの際に静止画を選択することもできる。
(6)情報処理装置104は、咬合力の動画を作成した後、咬合力の動画をチェックバイト画像とオーバーラップ表示する。オーバーラップ表示を行うことで、歯列全体における咬合力の発生箇所と変化を一目で把握できる、情報処理装置104を実現できる。
(7)情報処理装置104は、咬合力の動画を作成した後、歯列中の、咬合力が最初に発生した箇所をマーキング表示する。マーキング表示を行うことで、歯列全体のうち最も突出している箇所を一目で把握できる、情報処理装置104を実現できる。
以上、本発明の実施形態について説明したが、本発明は上記実施形態に限定されるものではなく、請求の範囲に記載した本発明の要旨を逸脱しない限りにおいて、他の変形例、応用例を含む。
例えば、上記した実施形態例は本発明をわかりやすく説明するために装置及びシステムの構成を詳細かつ具体的に説明したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、ある実施例の構成の一部を他の実施例の構成に置き換えることは可能であり、更にはある実施例の構成に他の実施例の構成を加えることも可能である。また、各実施例の構成の一部について、他の構成の追加・削除・置換をすることも可能である。
また、上記の各構成、機能、処理部等は、それらの一部又は全部を、例えば集積回路で設計するなどによりハードウェアで実現してもよい。また、上記の各構成、機能等は、プロセッサがそれぞれの機能を実現するプログラムを解釈し、実行するためのソフトウェアで実現してもよい。各機能を実現するプログラム、テーブル、ファイル等の情報は、メモリや、ハードディスク、SSD(Solid State Drive)等の揮発性或は不揮発性のストレージ、または、ICカード、光ディスク等の記録媒体に保持することができる。
また、制御線や情報線は説明上必要と考えられるものを示しており、製品上必ずしもすべての制御線や情報線を示しているとは限らない。実際には殆ど全ての構成が相互に接続されていると考えてもよい。
例えば、上記した実施形態例は本発明をわかりやすく説明するために装置及びシステムの構成を詳細かつ具体的に説明したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、ある実施例の構成の一部を他の実施例の構成に置き換えることは可能であり、更にはある実施例の構成に他の実施例の構成を加えることも可能である。また、各実施例の構成の一部について、他の構成の追加・削除・置換をすることも可能である。
また、上記の各構成、機能、処理部等は、それらの一部又は全部を、例えば集積回路で設計するなどによりハードウェアで実現してもよい。また、上記の各構成、機能等は、プロセッサがそれぞれの機能を実現するプログラムを解釈し、実行するためのソフトウェアで実現してもよい。各機能を実現するプログラム、テーブル、ファイル等の情報は、メモリや、ハードディスク、SSD(Solid State Drive)等の揮発性或は不揮発性のストレージ、または、ICカード、光ディスク等の記録媒体に保持することができる。
また、制御線や情報線は説明上必要と考えられるものを示しており、製品上必ずしもすべての制御線や情報線を示しているとは限らない。実際には殆ど全ての構成が相互に接続されていると考えてもよい。
101…咬合測定装置、102…センサシート、103…信号処理装置、104…情報処理装置、105…コネクタ、106…表示部、107…患者接地線、108…リストバンド、109…装置接地線、110…患者、201…有機圧電フィルム、202…電極線、203…Y電極シート、204…X電極シート、206…ランド、301…第一マルチプレクサ、302…第二マルチプレクサ、303…差動増幅器、304…ノイズ除去部、305…非反転増幅器、306…第一理想ダイオード、307…反転増幅器、308…第二理想ダイオード、309…第一サンプルホールド回路、310…第一A/D変換器、311…第二サンプルホールド回路、312…第二A/D変換器、313…バス、314…CPU、315…ROM、316…RAM、317…USBインターフェース、318…制御部、319…走査アドレステーブル、501…全アドレス範囲、502…歯列、503…特定アドレス範囲、504…走査アドレス領域、701…CPU、702…ROM、703…RAM、704…不揮発性ストレージ、705…操作部、706…USBインターフェース、707…ファイルシステム、708…制御部、709…生データファイル、710…温度補償処理部、711…積分演算処理部、712…動画生成処理部、713…動画ファイル、714…動画再生処理部、715…画像合成処理部、716…チェックバイト画像ファイル、901…画面、902…動画表示領域、903…咬合力表示領域、904…停止ボタン、905…一時停止ボタン、906…再生速度指示スケール
Claims (2)
- 感圧フィルムと、前記感圧フィルムの一の面に形成される複数のX電極と、前記感圧フィルムの他の面に形成される、前記複数のX電極と直交する複数のY電極とを具備するセンサシートと、
前記複数のX電極のうちの一つと、前記複数のY電極のうちの一つとの相対電位を出力する差動増幅器と、
前記差動増幅器の出力信号に基づくデータを出力するA/D変換器と、
前記複数のX電極と前記差動増幅器との間に接続される第一マルチプレクサと、
前記複数のY電極と前記差動増幅器との間に接続される第二マルチプレクサと、
前記第一マルチプレクサと前記第二マルチプレクサを制御すると共に、前記X電極及び前記Y電極のアドレス情報を生成して、前記データと共に後続の装置に出力する制御部と
を具備する咬合力検出装置と、
歯列に咬合力に基づく圧力が発生した箇所のアドレス情報と、前記咬合力の変化を示すデータに対し、前記アドレス情報毎に積分演算処理を行う積分演算処理部と、
前記積分演算処理部によって積分されたデータを、前記アドレス情報に基づいて動画像データを作成する動画生成処理部と
を具備する情報処理装置と
よりなり、
前記制御部は、前記第一マルチプレクサ及び前記第二マルチプレクサを制御して、前記複数のX電極と前記複数のY電極の何れか一方の電極群を一定の電圧のノードに接続しつつ、他方の電極の電位を検出して、所定の電位を検出した電極よりなる特定アドレス範囲を特定した後、前記複数のX電極のうち、前記所定の電位を検出した電極群と、前記複数のY電極のうち、前記所定の電位を検出した電極群とで構成される交点を走査して、所定の相対電位を検出する交点よりなる走査アドレス領域を特定して、前記走査アドレス領域に含まれる前記交点における、前記X電極と前記Y電極の相対電位を前記差動増幅器から出力させる、
咬合測定装置。 - 感圧フィルムと、前記感圧フィルムの一の面に形成される複数のX電極と、前記感圧フィルムの他の面に形成される、前記複数のX電極と直交する複数のY電極とを具備するセンサシートの、前記複数のX電極と前記複数のY電極の何れか一方の電極群を一定の電圧のノードに接続しつつ、他方の電極の電位を検出して、所定の電位を検出した電極よりなる特定アドレス範囲を特定する、特定アドレス範囲特定ステップと、
前記特定アドレス範囲特定ステップにて特定した、前記複数のX電極のうち、前記所定の電位を検出した電極群と、前記複数のY電極のうち、前記所定の電位を検出した電極群とで構成される交点を走査して、所定の相対電位を検出する交点よりなる走査アドレス領域を特定する、走査アドレス領域特定ステップと、
前記走査アドレス領域に含まれる前記交点における、前記X電極と前記Y電極の相対電位を検出する、相対電位検出ステップと、
前記相対電位検出ステップにて得られた前記相対電位を積分処理する積分処理ステップと
を有する、咬合力検出方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/112,097 US10485642B2 (en) | 2014-01-21 | 2015-01-21 | Occlusion measurement device and method for detecting occlusal force |
| EP15740135.7A EP3097888B1 (en) | 2014-01-21 | 2015-01-21 | Occlusion measurement device and method for detecting occlusal force |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014008605 | 2014-01-21 | ||
| JP2014-008605 | 2014-01-21 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2015111633A1 true WO2015111633A1 (ja) | 2015-07-30 |
Family
ID=53681434
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/051568 WO2015111633A1 (ja) | 2014-01-21 | 2015-01-21 | 咬合測定装置及び咬合力検出方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10485642B2 (ja) |
| EP (1) | EP3097888B1 (ja) |
| WO (1) | WO2015111633A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021201247A1 (ja) * | 2020-04-03 | 2021-10-07 | 凸版印刷株式会社 | 信号検出回路、駆動検出回路、センサアレイおよびセンサシステム |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111065354B (zh) * | 2017-09-14 | 2022-05-31 | 株式会社Gc | 咬合压力解析装置、咬合压力解析程序及咬合压力解析方法 |
| EP3536277B1 (en) * | 2018-03-09 | 2021-05-19 | Universidad del Pais Vasco - Euskal Herriko Unibertsitatea (UPV/EHU) | Method and system of dental occlusion measurement and virtual deployment |
| EP3536278A1 (en) * | 2018-03-09 | 2019-09-11 | Universidad del Pais Vasco - Euskal Herriko Unibertsitatea (UPV/EHU) | Method and system of occlusion forces measurement and alignment |
| JP7422545B2 (ja) * | 2020-01-06 | 2024-01-26 | 学校法人 日本歯科大学 | 咬合圧解析プログラム |
| US20220378350A1 (en) | 2021-05-25 | 2022-12-01 | Cheng-Hsiang Hung | System and method for generating occlusal loading based on simulated human ingestion actions |
| JP7563406B2 (ja) | 2022-03-04 | 2024-10-08 | 株式会社村田製作所 | 口腔用圧力測定装置 |
| CN119950997A (zh) * | 2023-12-26 | 2025-05-09 | 杭州海莱新创医疗科技有限公司 | 电极片及肿瘤电场治疗系统 |
Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS56142430A (en) * | 1980-03-24 | 1981-11-06 | Morita Mfg Co Ltd | Biting pressure sensor |
| JPS56156137A (en) * | 1980-05-02 | 1981-12-02 | Morita Mfg | Aparatus for displaying biting pressure image of total jaw |
| JPH03284257A (ja) * | 1990-03-30 | 1991-12-13 | Anritsu Corp | かみ合わせ検出センサ |
| JPH05322679A (ja) * | 1992-05-21 | 1993-12-07 | Shinei Denki Seisakusho:Kk | 2次元圧力センサ及びモニタ装置 |
| JPH0720478B2 (ja) | 1985-03-29 | 1995-03-08 | テクスカン・インコーポレーテッド | 咬合測定用接点検出器 |
| JPH07190870A (ja) | 1993-12-24 | 1995-07-28 | Fujitsu Ltd | 触覚センサ及びその制御方法 |
| JP2904494B2 (ja) * | 1987-10-02 | 1999-06-14 | テクスカン・インコーポレーテッド | 歯の噛み合わせを測定するための改良された加圧接触センサ |
| JP3668312B2 (ja) * | 1996-01-25 | 2005-07-06 | オリンパス株式会社 | 触覚センサ |
| JP2008125872A (ja) * | 2006-11-22 | 2008-06-05 | Kaohsiung Medical Univ | 歯科用咬合力測定装置及び測定システム |
| JP2008264024A (ja) * | 2007-04-16 | 2008-11-06 | Etcc:Kk | 咬合特性分析装置及び咬合特性分析方法 |
| JP4240224B2 (ja) * | 2004-03-30 | 2009-03-18 | 株式会社モリタ東京製作所 | 歯科用咬合圧測定・調整システム |
| JP4243843B2 (ja) * | 2003-09-19 | 2009-03-25 | 株式会社モリタ東京製作所 | 歯科用咬合圧測定・調整システム |
| JP2013048680A (ja) | 2011-08-30 | 2013-03-14 | Gc Corp | 咬合圧測定器、咬合圧測定システム |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6148852A (ja) | 1984-08-16 | 1986-03-10 | Fuji Photo Film Co Ltd | 写真要素 |
| JP3177347B2 (ja) | 1993-06-30 | 2001-06-18 | シャープ株式会社 | 液晶表示素子の製造方法 |
| JP5805204B2 (ja) * | 2010-11-03 | 2015-11-04 | カーディオインサイト テクノロジーズ インコーポレイテッド | 心臓の機能を評価するためのシステム |
| JP2013025555A (ja) * | 2011-07-21 | 2013-02-04 | Sony Corp | 情報処理装置、情報処理システム、情報処理方法、及び、プログラム |
-
2015
- 2015-01-21 EP EP15740135.7A patent/EP3097888B1/en active Active
- 2015-01-21 WO PCT/JP2015/051568 patent/WO2015111633A1/ja active Application Filing
- 2015-01-21 US US15/112,097 patent/US10485642B2/en active Active
Patent Citations (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6148852B2 (ja) * | 1980-03-24 | 1986-10-27 | Morita Mfg | |
| JPS56142430A (en) * | 1980-03-24 | 1981-11-06 | Morita Mfg Co Ltd | Biting pressure sensor |
| JPS56156137A (en) * | 1980-05-02 | 1981-12-02 | Morita Mfg | Aparatus for displaying biting pressure image of total jaw |
| JPH0720478B2 (ja) | 1985-03-29 | 1995-03-08 | テクスカン・インコーポレーテッド | 咬合測定用接点検出器 |
| JP2904494B2 (ja) * | 1987-10-02 | 1999-06-14 | テクスカン・インコーポレーテッド | 歯の噛み合わせを測定するための改良された加圧接触センサ |
| JPH03284257A (ja) * | 1990-03-30 | 1991-12-13 | Anritsu Corp | かみ合わせ検出センサ |
| JPH05322679A (ja) * | 1992-05-21 | 1993-12-07 | Shinei Denki Seisakusho:Kk | 2次元圧力センサ及びモニタ装置 |
| JPH07190870A (ja) | 1993-12-24 | 1995-07-28 | Fujitsu Ltd | 触覚センサ及びその制御方法 |
| JP3668312B2 (ja) * | 1996-01-25 | 2005-07-06 | オリンパス株式会社 | 触覚センサ |
| JP4243843B2 (ja) * | 2003-09-19 | 2009-03-25 | 株式会社モリタ東京製作所 | 歯科用咬合圧測定・調整システム |
| JP4240224B2 (ja) * | 2004-03-30 | 2009-03-18 | 株式会社モリタ東京製作所 | 歯科用咬合圧測定・調整システム |
| JP2008125872A (ja) * | 2006-11-22 | 2008-06-05 | Kaohsiung Medical Univ | 歯科用咬合力測定装置及び測定システム |
| JP2008264024A (ja) * | 2007-04-16 | 2008-11-06 | Etcc:Kk | 咬合特性分析装置及び咬合特性分析方法 |
| JP2013048680A (ja) | 2011-08-30 | 2013-03-14 | Gc Corp | 咬合圧測定器、咬合圧測定システム |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2021201247A1 (ja) * | 2020-04-03 | 2021-10-07 | 凸版印刷株式会社 | 信号検出回路、駆動検出回路、センサアレイおよびセンサシステム |
| JPWO2021201247A1 (ja) * | 2020-04-03 | 2021-10-07 | ||
| JP7670053B2 (ja) | 2020-04-03 | 2025-04-30 | Toppanホールディングス株式会社 | センサアレイ |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3097888A1 (en) | 2016-11-30 |
| US20160338812A1 (en) | 2016-11-24 |
| US10485642B2 (en) | 2019-11-26 |
| EP3097888B1 (en) | 2019-11-20 |
| EP3097888A4 (en) | 2017-11-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2015111633A1 (ja) | 咬合測定装置及び咬合力検出方法 | |
| JP5782599B2 (ja) | 咬合力検出装置及び咬合力検出方法 | |
| KR940000860B1 (ko) | 치아 교합을 측정하기 위한 접촉 감지기 | |
| US7402996B2 (en) | Instrument and method for measuring three-dimensional motion | |
| CN105559941B (zh) | 测量全牙列动态啮合的凝胶薄膜阵列式电容传感器及方法 | |
| López et al. | High-performance analog front-end (AFE) for EOG systems | |
| EP2378834A1 (en) | Method and circuit for automatic calibration of the power of electromagnetic oven | |
| O'Toole et al. | Influence of scanner precision and analysis software in quantifying three-dimensional intraoral changes: two-factor factorial experimental design | |
| EP2564809B1 (en) | Occlusal pressure measuring device and occlusal pressure measuring system | |
| CN112237424A (zh) | 高精度阻抗测量 | |
| US20250175566A1 (en) | Information processing apparatus, information processing method, and information processing program | |
| CN112263235A (zh) | 基于混合电断层成像技术的手势识别系统 | |
| CN102411095B (zh) | 一种有源静电电场探头 | |
| CN104997569B (zh) | 一种基于可拆卸牙套的牙齿综合测量仪 | |
| JP6492103B2 (ja) | 生体内信号源位置検出方法及び生体内信号源位置検出装置 | |
| CN105852821A (zh) | 一种体温测量装置及其测量方法 | |
| JP7267525B2 (ja) | センサシート | |
| WO2004110298A1 (ja) | 根尖位置検出装置 | |
| JP4209429B2 (ja) | ひずみ・温度測定方法 | |
| JP7081793B2 (ja) | 触覚センサ | |
| JP2005517949A (ja) | 物理量を測定するためのユニバーサル入力式のデータ収集モジュール | |
| CN114681047A (zh) | 用于检测电极线噪声的系统、方法和过程 | |
| CN209279879U (zh) | 一种新型电阻应变片 | |
| CN222033045U (zh) | 一种压力信号检测电路以及医疗设备 | |
| TWI445951B (zh) | Detection system and data processing device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15740135 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15112097 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| REEP | Request for entry into the european phase |
Ref document number: 2015740135 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2015740135 Country of ref document: EP |