WO2015076152A1 - ヘルメット着用判定方法、ヘルメット着用判定システム、ヘルメット着用判定装置及びプログラム - Google Patents
ヘルメット着用判定方法、ヘルメット着用判定システム、ヘルメット着用判定装置及びプログラム Download PDFInfo
- Publication number
- WO2015076152A1 WO2015076152A1 PCT/JP2014/079825 JP2014079825W WO2015076152A1 WO 2015076152 A1 WO2015076152 A1 WO 2015076152A1 JP 2014079825 W JP2014079825 W JP 2014079825W WO 2015076152 A1 WO2015076152 A1 WO 2015076152A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- helmet
- head
- wearing
- image
- worn
- Prior art date
Links
Images







Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/015—Detecting movement of traffic to be counted or controlled with provision for distinguishing between two or more types of vehicles, e.g. between motor-cars and cycles
-
- A—HUMAN NECESSITIES
- A42—HEADWEAR
- A42B—HATS; HEAD COVERINGS
- A42B3/00—Helmets; Helmet covers ; Other protective head coverings
- A42B3/04—Parts, details or accessories of helmets
- A42B3/0406—Accessories for helmets
- A42B3/0433—Detecting, signalling or lighting devices
- A42B3/0466—Means for detecting that the user is wearing a helmet
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/22—Matching criteria, e.g. proximity measures
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/24—Classification techniques
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/44—Local feature extraction by analysis of parts of the pattern, e.g. by detecting edges, contours, loops, corners, strokes or intersections; Connectivity analysis, e.g. of connected components
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/59—Context or environment of the image inside of a vehicle, e.g. relating to seat occupancy, driver state or inner lighting conditions
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/20—Movements or behaviour, e.g. gesture recognition
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/04—Detecting movement of traffic to be counted or controlled using optical or ultrasonic detectors
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/59—Context or environment of the image inside of a vehicle, e.g. relating to seat occupancy, driver state or inner lighting conditions
- G06V20/597—Recognising the driver's state or behaviour, e.g. attention or drowsiness
Definitions
- the present invention relates to a helmet wear determination method, a helmet wear determination system, a helmet wear determination device, and a program.
- a technique for monitoring a moving body such as an automobile traveling on a road has been proposed from the viewpoint of safety. And that technique is a technique for determining and detecting whether a moving object traveling on a road is an automobile (four-wheeled vehicle), a motorcycle (two-wheeled vehicle), a bicycle (two-wheeled vehicle), or a pedestrian. .
- Patent Document 1 a technique for detecting whether or not a motorcycle passenger is wearing a helmet has been proposed (for example, Patent Document 1).
- a captured image input from a camera is processed and an imaged person is detected in an image processing unit.
- the image processing unit determines whether the person is wearing a helmet.
- the determination method first detects a person's face and head, and determines whether a helmet is worn based on the ratio of the width of the face to the width of the head.
- Patent Document 1 requires image processing for detecting a human face and head, but in the case of wearing a helmet type, for example, a full face type or jet type helmet, the face Is hidden in the helmet and it is difficult to detect the face.
- a helmet type for example, a full face type or jet type helmet
- the present invention has been invented in view of the above problems, and a helmet wear determination method, a helmet wear determination system, and a helmet wear that can accurately detect whether or not a motorcycle occupant is wearing a helmet.
- a helmet wear determination method a helmet wear determination system, and a helmet wear that can accurately detect whether or not a motorcycle occupant is wearing a helmet.
- the present invention provides a photographing unit that is installed at a predetermined position and photographs a two-wheeled vehicle traveling on a road, and processes a photographed image photographed by the photographing unit, and is used by a person on a two-wheeled vehicle traveling on the road.
- the passenger head region corresponding to the head is estimated, and the image characteristics of the passenger head region are compared with the image features corresponding to the head when the helmet is worn and / or when the helmet is not worn;
- It is a helmet wear determination system which has a helmet wear determination means for determining whether a person is wearing or not wearing a helmet.
- the present invention processes a photographed image of a photographing device photographing a road, estimates a passenger head region corresponding to a head of a person riding a motorcycle traveling on the road, and A helmet wear determination for determining whether the occupant is wearing or not wearing a helmet by comparing an image feature extracted from the head region of the person with an image feature corresponding to the head when the helmet is worn and / or when the helmet is not worn Is the method.
- the present invention processes a photographed image of a photographing device photographing a road, estimates a passenger head region corresponding to a head of a person riding a motorcycle traveling on the road, and A helmet wearing determination means for comparing the image characteristics of the head area of the person with the image characteristics corresponding to the head when the helmet is worn and / or when the helmet is not worn, and judging whether the passenger is wearing or not wearing the helmet It is the helmet wear determination apparatus which has.
- the present invention processes a photographed image of a photographing device photographing a road, and estimates a passenger head region corresponding to the head of a person riding in a motorcycle traveling on the road; A process of comparing the image characteristics of the head area of the occupant and the image characteristics corresponding to the head when the helmet is worn or / and when the helmet is not worn, and determining whether the occupant is wearing or not wearing the helmet; A program to be executed by a computer.
- the present invention it is possible to detect with high accuracy whether or not a motorcycle occupant is wearing a helmet from a photographed image of a traveling motorcycle.
- FIG. 1 is a block diagram for explaining the concept of the present invention.
- FIG. 2 is a diagram for explaining the present invention.
- FIG. 3 is a block diagram of the two-wheeled vehicle riding number determination system according to the embodiment of the present invention.
- FIG. 4 is a view for explaining the installation position of the photographing apparatus 1.
- FIG. 5 is a diagram for explaining an embodiment of the present invention.
- FIG. 6 is a diagram for explaining an embodiment of the present invention.
- FIG. 7 is a diagram for explaining an embodiment of the present invention.
- FIG. 8 is a diagram for explaining an embodiment of the present invention.
- FIG. 1 is a block diagram for explaining the concept of the present invention.
- 1 is a photographing device
- 2 is a helmet wearing determination device.
- the photographing apparatus 1 is installed at a predetermined position beside the road on which the two-wheeled vehicle travels, and photographs the two-wheeled vehicle traveling on the road.
- the two-wheeled vehicle is, for example, a motorcycle such as a motorcycle, a bicycle, or the like.
- the helmet wearing determination device 2 processes a photographed image of the photographing device 1, estimates a passenger head region corresponding to the head of a person riding on a motorcycle traveling on a road, and determines a passenger head region. Are compared with image characteristics corresponding to the head when the helmet is worn and / or when the helmet is not worn, to determine whether the occupant is wearing or not wearing the helmet.
- the present invention relates to the image characteristics of the head (the entire shape including the head and face) when the helmet is worn, and the image of the head (the entire shape including the head and face) when the helmet is not worn.
- the feature is characterized by determining whether the helmet of the rider of the motorcycle is worn or not by using the fact that each has a unique image feature.
- the present invention does not need to recognize the face of the occupant of the motorcycle as in the prior art, and can determine whether the helmet of the occupant of the motorcycle is worn or not.
- an image of the region of the upper position of the two-wheeled vehicle is extracted from the photographed image photographed by the photographing device 1.
- the extraction method after extracting an entire image in which a driver or the like is on the motorcycle, an image of a region in the range of the upper position that has been preliminarily taken out is extracted from the entire image.
- the body part of the two-wheeled vehicle may be specified from the entire captured image in which the driver or the like is riding on the two-wheeled vehicle, and an image of a predetermined range area above the body part may be extracted.
- the passenger head area corresponding to the head of the person on board is estimated from the extracted image of the upper area.
- the human head is such a sphere, and even if it is covered with a helmet, the outline of the head is arcuate to some extent, and the tip of the bump is not sharp. If the shape of the head estimated to be a human head is learned in advance and stored in a database, the passenger head region corresponding to the passenger's head can be identified from the extracted region. .
- the shape corresponding to the human head from the shape of the valley of the contour of the image at the upper position.
- the line from the head and back of the person riding in front of the motorcycle to the arm of the person riding behind the motorcycle and from the chest to the head A unique valley is formed between the heads. Therefore, if the shape of the peculiar valley is learned in advance and stored in a database, the passenger head region including the head can be specified from the contour shape of the upper position. Furthermore, by combining the two methods described above, the specific accuracy of the passenger head region including the head can be further increased.
- the image feature of the passenger head region is compared with the image feature corresponding to the head when the helmet is worn or the image feature corresponding to the head when the helmet is not worn.
- the image of the head when the helmet is worn has unique image features. For example, in helmets of full face type, jet type, cap type, etc., in an image from the direction in which the face is reflected, there are unique characteristics when the helmet is worn. On the other hand, the image of the head when the helmet is not worn also has unique image characteristics.
- FIG. 3 is a block diagram of the helmet wearing determination system according to the embodiment of the present invention.
- the helmet wear determination system includes a photographing device 1, a helmet wear determination device 2, and a notification device 3.
- the photographing apparatus 1 photographs a two-wheeled vehicle traveling on a road, and is installed at a position where an image that can easily detect the passenger head region described above can be photographed.
- FIG. 4 it is installed at a position where the two-wheeled vehicle can shoot in the range from the front to the side (mainly diagonally forward) with respect to the traveling direction of the two-wheeled vehicle.
- helmets There are several types of helmets, such as full face type, jet type, and cap type. Therefore, when photographing from the direction in which the face of the passenger of the motorcycle is reflected, the difference between when the helmet is worn and when the helmet is not worn tends to stand out.
- the photographing apparatus 1 be installed in front of a point where the two-wheeled vehicle decelerates, such as an intersection, a temporary stop line, a curve, or a speed-bump.
- the helmet wear determination device 2 includes a mobile body detection unit 21, a category classification unit 22, a vehicle body position detection unit 23, a passenger head region estimation unit 24, a helmet wear determination unit 25, and a category determination dictionary 26.
- the vehicle body detection dictionary 27, the passenger head region estimation dictionary 28, and the helmet wearing determination dictionary 29 are included.
- the moving body detection unit 21 detects a moving body that moves in the image from the photographing apparatus 1.
- Various methods for detecting a moving object have been proposed in the past, and an appropriate method may be selected.
- the category classification unit 22 uses the category determination dictionary 26 to specify a two-wheeled vehicle (bike) from the moving body, and outputs an entire image of the moving two-wheeled vehicle (bike) to the vehicle body position detecting unit 23.
- the category determination dictionary 26 information for specifying a motorcycle is stored in a database.
- the category classification unit 22 receives the detection of the moving object from the moving object detection unit 21, and classifies the type (category) of the moving object.
- the classification of a mobile object type (category) is determined in advance by determining the size of a search range for identifying the type (category) of the mobile object, and the mobile object is other than a two-wheeled vehicle depending on the feature amount in the search range. Is calculated, and based on the result, the moving body excludes those other than the two-wheeled vehicle. For example, a feature in which two circles are arranged substantially linearly within a predetermined search range can be used as a feature for calculating a probability that the moving body is other than a two-wheeled vehicle.
- the characteristics of the position and number of headlights can be used as characteristics for calculating the probability that the headlight is not a motorcycle.
- Such characteristic parts of the image are learned in advance, and the data is stored in the database as the category determination dictionary 25.
- category part 22 determines the probability that the detected moving body is not a two-wheeled vehicle using the category determination dictionary 25, and when this probability exceeds a predetermined threshold value, the whole image of the moving body is displayed as the vehicle body position. In other cases, the entire image of the detected moving object is output to the vehicle body position detection unit 23 without being output to the detection unit 23.
- a moving body that is determined to be not a two-wheeled vehicle with a probability of 90% or less, for example, 85% is a two-wheeled vehicle, so that it is output to the vehicle body position detecting unit 23 for detailed verification.
- the vehicle body position detection unit 23 specifies a range corresponding to the vehicle body part of the two-wheeled vehicle from the moving object image output from the category classification unit 22 using the vehicle body detection dictionary 26.
- the range is specified by connecting the front end of the front wheel of the motorcycle and the rear end of the rear wheel.
- a range in which the height is the width and the length of the wheel in the vertical direction is the width of the vehicle body is specified. Further, in the example of the entire image of the motorcycle (bike) shown in FIG.
- the length connecting the lateral tip of the front wheel of the motorcycle and the lateral rear end of the rear wheel is defined as the lateral width
- a range slightly larger than the width between the front end and the front end of the front wheel and the rear wheel is specified as the range of the vehicle body.
- the vehicle body position detection unit 23 may not be able to identify the vehicle body part of the motorcycle using the vehicle body detection dictionary 26. .
- the moving body is not a motorcycle and is excluded from the processing target.
- the occupant head region estimation unit 24 detects the occupant head region estimated as the head of the person on the vehicle from the upper region of the vehicle body specified by the vehicle body position detection unit 23.
- the contour shape corresponding to the human head is detected from the contour shape of the image in the upper region of the vehicle body specified by the vehicle body position detection unit 23, and a predetermined size region surrounding the contour shape is detected by the passenger. Detect as head region.
- the human head is such a sphere, and even if it is wearing a helmet, its contour shape is to some extent arcuate, etc. Every time, it is registered in the passenger head region estimation dictionary 28.
- the head and back of the person riding in front of the motorcycle, the arm of the person riding behind the motorcycle, and the chest to head A unique valley formed by a continuous line is formed between the heads. Therefore, if this unique valley shape is learned in advance and registered in the occupant head region estimation dictionary 28, the occupant head region including the head is identified from the contour shape of the upper position. Can do. Furthermore, by combining the two methods described above, the specific accuracy of the passenger head region including the head can be further increased.
- the helmet wearing determination unit 25 compares the image feature of the passenger head region with the image feature corresponding to the head when the helmet is worn or the image feature corresponding to the head when the helmet is not worn. Determine whether or not you are wearing.
- an image of a head of a passenger wearing a helmet such as a full face type, a jet type, or a cap type has unique characteristics as shown in FIG.
- the image of the head when the helmet is not worn also has unique features as shown in FIG.
- a unique feature for example, when a helmet is worn, there is a feature that a straight line is formed across the face in the middle of the head and slightly above.
- the head shape is sharper and rounder when wearing the helmet than when not wearing it.
- the head shape is fixed when viewed in chronological order, while when not worn, the hair is fluttered and is not fixed.
- Image features of these features include HOG features, luminance gradient features (direction features), CCS features, Haar like features, and statistical identification methods such as Support Vector Machine, Generalized Learning Vector Quantization, AdaBoost, Real AdaBoost, and pseudo Bayes Learning is performed in advance using identification or the like, and the information is registered in the helmet wearing determination dictionary 29.
- the helmet wear determination unit 25 uses the helmet wear determination dictionary 29 to determine whether the image feature of the passenger head region is similar to the image feature when the helmet is worn or the image feature when the helmet is not worn. It is determined whether or not a two-wheeled vehicle occupant on the photographed image is wearing a helmet.
- the helmet wearing determination dictionary 29 in which the above-described features are stored can be detected from the image features of the head of the passenger head region that a straight line is generated across the head center and slightly above Determine that you are wearing a helmet.
- a straight line is generated across the head center and slightly above Determine that you are wearing a helmet.
- the helmet wearing determination dictionary 29 in which the above-described features are stored can be detected that the head shape is clearly rounded by the image feature of the head in the passenger head region, the helmet is worn. Judge that you are. On the other hand, when the clear roundness cannot be detected, it is determined that the helmet is not worn.
- the helmet wearing determination dictionary 29 in which the above-described features are stored, the helmet is worn. Judge that you are. On the other hand, if it is not fixed, it is determined that the helmet is not worn.
- the notification device 3 is a device that has a display unit 30 that displays a captured image of the imaging device 1 and notifies the monitoring result of the determination result of the helmet wearing determination unit 25.
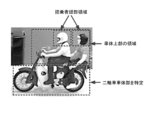
- the notification device 3 includes the determination result of the helmet wearing determination unit 25, the coordinates of the region surrounding the passenger and the motorcycle body from the vehicle body position detection unit 23, and the coordinates of the passenger head region from the passenger head region estimation unit 24. Receive. And as shown in FIG. 8, while displaying the picked-up image of the imaging device 1 on the display part 30, and the determination result of the helmet wearing determination part 25 is a passenger's helmet non-wearing, on the picked-up image, a motorcycle main body is shown. And a graphic surrounding the area including at least the passenger's head and a graphic surrounding the passenger's head area.
- the characteristics of the passenger may be displayed in an easily understandable (for example, large) manner.
- the characteristics of the passenger include, for example, a face, clothes, a motorcycle (color, vehicle type, modification, etc.).
- these features are recognized from the image, the recognized portion is cut out from the image, and the cut out image is displayed in a large size separately from the image shown in FIG. 8 (for example, , Display the driver ’s face larger).
- the above-mentioned recognized features for example, face, clothes, bike color, vehicle type, modification, etc.
- the verification result may be displayed.
- the present embodiment configured as described above, it is not necessary to recognize the face of a two-wheeled vehicle occupant, and it is possible to determine whether or not the motorcycle occupant is wearing a helmet.
- the motorcycle and the head not wearing the helmet are displayed so that they can be easily identified, so that the supervisor can be alerted.
- the helmet wear determination unit 25 may include an infrared detection unit (not shown).
- the infrared detector may be an infrared sensor, for example.
- the helmet wearing determination unit 25 may determine whether or not the helmet is worn based on, for example, an infrared detection result by the infrared detecting unit.
- the helmet wearing determination unit 25 may determine whether or not the helmet is worn by weighting the result of the comparison of the image features described above with an infrared detection result. By including the infrared detection unit, the helmet wearing determination unit 25 can more accurately determine whether or not the helmet is worn.
- the helmet wearing determination device 2 is configured by hardware, but may be realized by a computer program.
- functions and operations similar to those of the above-described embodiment are realized by a processor that operates according to a program stored in the program memory.
- only some functions of the above-described embodiments can be realized by a computer program.
- the determination target is described as a two-wheeled vehicle.
- the present invention is not limited to a two-wheeled vehicle and can be applied to a unicycle, a three-wheeled vehicle, and others.
- photography means installed in the predetermined position, and image
- the helmet wearing determination for comparing the image characteristics of the passenger head region with the image characteristics corresponding to the head when the helmet is worn and / or when the helmet is not worn, and judging whether the passenger is wearing or not wearing the helmet
- the said helmet wearing determination means compares the image characteristic corresponding to the head at the time of helmet wearing or / and the helmet non-wearing learned and memorize
- region estimation means specifies the position of a two-wheeled vehicle from the said picked-up image, and the said passenger's head area
- the helmet wearing determination system according to attachment 2.
- Additional remark 4 The helmet wearing determination system in any one of Additional remark 1 to Additional remark 3 which has an alerting
- reporting means is a helmet wearing determination system of Additional remark 4 which alert
- the notification means includes Display means for displaying the captured image;
- the determination result of the helmet wearing determination means is that the helmet is not worn, a figure surrounding the region including at least the two-wheeled vehicle main body and the passenger head specified by the passenger head area estimation means on the photographed image.
- the helmet wearing determination system according to appendix 5 to be displayed.
- photography means is a helmet wearing determination system in any one of Additional remark 1 to Additional remark 6 installed in the position which can image
- photography means is a helmet wear determination system in any one of Additional remark 1 to Additional remark 7 installed in front of the point where a two-wheeled vehicle decelerates.
- the position of the motorcycle is specified from the captured image, The helmet wearing determination method according to supplementary note 9 or supplementary note 10, wherein the occupant head region is estimated from an image region of an upper position of the identified two-wheeled vehicle.
- photographed the road is processed, the passenger head area
Abstract
Description
前記撮影手段が撮影した撮影画像を処理し、前記道路を走行している二輪車に搭乗している人の頭部に対応する搭乗者頭部領域を推定し、
前記搭乗者頭部領域の画像特徴と、ヘルメット着用時又は/及びヘルメット非着用時の頭部に対応する画像特徴とを比較し、前記搭乗者のヘルメットの着用又は非着用を判定するヘルメット着用判定手段と
を有するヘルメット着用判定システム。
付記1に記載のヘルメット着用判定システム。
付記1又は付記2に記載のヘルメット着用判定システム。
有する
付記1から付記3のいずれかに記載のヘルメット着用判定システム。
付記4に記載のヘルメット着用判定システム。
前記撮影画像を表示する表示手段を有し、
前記ヘルメット着用判定手段の判定結果がヘルメットの非着用である場合、前記撮影画像上に、前記搭乗者頭部領域推定手段が特定した二輪車本体及び前記搭乗者頭部を少なくとも含む領域を囲む図形を表示する
付記5に記載のヘルメット着用判定システム。
付記1から付記6のいずれかに記載のヘルメット着用判定システム。
付記1から付記7のいずれかに記載のヘルメット着用判定システム。
前記搭乗者頭部領域から抽出した画像特徴と、ヘルメット着用時又は/及びヘルメット非着用時の頭部に対応する画像特徴とを比較し、前記搭乗者のヘルメットの着用又は非着用を判定する
ヘルメット着用判定方法。
付記9に記載のヘルメット着用判定方法。
前記特定された二輪車の上部位置の画像領域から、前記搭乗者頭部領域を推定する
付記9又は付記10に記載のヘルメット着用判定方法。
付記9から付記11のいずれかに記載のヘルメット着用判定方法。
付記12に記載のヘルメット着用判定方法。
付記13に記載のヘルメット着用判定方法。
付記9から付記14のいずれかに記載のヘルメット着用判定方法。
付記15に記載のヘルメット着用判定方法。
前記搭乗者頭部領域の画像特徴と、ヘルメット着用時又は/及びヘルメット非着用時の頭部に対応する画像特徴とを比較し、前記搭乗者のヘルメットの着用又は非着用を判定するヘルメット着用判定手段
を有するヘルメット着用判定装置。
前記搭乗者頭部領域の画像特徴と、ヘルメット着用時又は/及びヘルメット非着用時の頭部に対応する画像特徴とを比較し、前記搭乗者のヘルメットの着用又は非着用を判定する処理と
をコンピュータに実行させるプログラム。
2 ヘルメット着用判定装置
3 報知装置
21 移動体検出部
22 カテゴリ分類部
23 車体位置検出部
24 搭乗者頭部領域推定部
25 ヘルメット着用判定部
26 カテゴリ判定辞書
27 車体検出辞書
28 搭乗者頭部領域推定辞書
29 ヘルメット着用判定辞書
30 表示部
Claims (18)
- 所定の位置に設置され、道路を走行する二輪車を撮影する撮影手段と、
前記撮影手段が撮影した撮影画像を処理し、前記道路を走行している二輪車に搭乗している人の頭部に対応する搭乗者頭部領域を推定し、
前記搭乗者頭部領域の画像特徴と、ヘルメット着用時又は/及びヘルメット非着用時の頭部に対応する画像特徴とを比較し、前記搭乗者のヘルメットの着用又は非着用を判定するヘルメット着用判定手段と
を有するヘルメット着用判定システム。 - 前記ヘルメット着用判定手段は、予め学習して記憶されたヘルメット着用時又は/及びヘルメット非着用時の頭部に対応する画像特徴と、前記搭乗者頭部領域の画像特徴とを比較し、前記搭乗者がヘルメットを着用の有無を判定する
請求項1に記載のヘルメット着用判定システム。 - 前記搭乗者頭部領域推定手段は、前記撮影画像から二輪車の位置を特定し、前記特定された二輪車の上部位置の画像領域から、前記搭乗者頭部領域を推定する
請求項1又は請求項2に記載のヘルメット着用判定システム。 - 前記ヘルメット着用判定手段の判定結果を報知する報知手段を
有する
請求項1から請求項3のいずれかに記載のヘルメット着用判定システム。 - 前記報知手段は、前記ヘルメット着用判定手段の判定結果がヘルメットの非着用である場合に報知する
請求項4に記載のヘルメット着用判定システム。 - 前記報知手段は、
前記撮影画像を表示する表示手段を有し、
前記ヘルメット着用判定手段の判定結果がヘルメットの非着用である場合、前記撮影画像上に、前記搭乗者頭部領域推定手段が特定した二輪車本体及び前記搭乗者頭部を少なくとも含む領域を囲む図形を表示する
請求項5に記載のヘルメット着用判定システム。 - 前記撮影手段は、二輪車の進行方向に対して斜め前方から真横までの範囲で、前記二輪車を撮影できる位置に設置される
請求項1から請求項6のいずれかに記載のヘルメット着用判定システム。 - 前記撮影手段は、二輪車が減速する地点の手前に設置される
請求項1から請求項7のいずれかに記載のヘルメット着用判定システム。 - 道路を撮影している撮影装置の撮影画像を処理し、前記道路を走行している二輪車に搭乗している人の頭部に対応する搭乗者頭部領域を推定し、
前記搭乗者頭部領域から抽出した画像特徴と、ヘルメット着用時又は/及びヘルメット非着用時の頭部に対応する画像特徴とを比較し、前記搭乗者のヘルメットの着用又は非着用を判定する
ヘルメット着用判定方法。 - ヘルメット着用時又は/及びヘルメット非着用時の頭部に対応する画像特徴を、予め学習しておく
請求項9に記載のヘルメット着用判定方法。 - 前記撮影画像から二輪車の位置を特定し、
前記特定された二輪車の上部位置の画像領域から、前記搭乗者頭部領域を推定する
請求項9又は請求項10に記載のヘルメット着用判定方法。 - 前記判定の結果を報知する
請求項9から請求項11のいずれかに記載のヘルメット着用判定方法。 - 前記判定の結果が、ヘルメットの非着用である場合に報知する
請求項12に記載のヘルメット着用判定方法。 - 前記判定の結果が、ヘルメットの非着用である場合、前記撮影画像上に、前記二輪車本体及び前記搭乗者頭部を少なくとも含む領域を囲む図形を表示して報知する
請求項13に記載のヘルメット着用判定方法。 - 二輪車の進行方向に対して斜め前方から真横までの範囲で、前記二輪車を撮影する
請求項9から請求項14のいずれかに記載のヘルメット着用判定方法。 - 二輪車が減速する地点の手前から、前記二輪車を撮影する
請求項15に記載のヘルメット着用判定方法。 - 道路を撮影している撮影装置の撮影画像を処理し、前記道路を走行している二輪車に搭乗している人の頭部に対応する搭乗者頭部領域を推定し、
前記搭乗者頭部領域の画像特徴と、ヘルメット着用時又は/及びヘルメット非着用時の頭部に対応する画像特徴とを比較し、前記搭乗者のヘルメットの着用又は非着用を判定するヘルメット着用判定手段
を有するヘルメット着用判定装置。 - 道路を撮影している撮影装置の撮影画像を処理し、前記道路を走行している二輪車に搭乗している人の頭部に対応する搭乗者頭部領域を推定する処理と、
前記搭乗者頭部領域の画像特徴と、ヘルメット着用時又は/及びヘルメット非着用時の頭部に対応する画像特徴とを比較し、前記搭乗者のヘルメットの着用又は非着用を判定する処理と
をコンピュータに実行させるプログラム。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015549086A JP6512410B2 (ja) | 2013-11-20 | 2014-11-11 | ヘルメット着用判定方法、ヘルメット着用判定システム、ヘルメット着用判定装置及びプログラム |
| US15/037,875 US11003929B2 (en) | 2013-11-20 | 2014-11-11 | Helmet wearing determination method, helmet wearing determination system, helmet wearing determination apparatus, and program |
| US16/376,530 US10679078B2 (en) | 2013-11-20 | 2019-04-05 | Helmet wearing determination method, helmet wearing determination system, helmet wearing determination apparatus, and program |
| US17/226,316 US11816983B2 (en) | 2013-11-20 | 2021-04-09 | Helmet wearing determination method, helmet wearing determination system, helmet wearing determination apparatus, and program |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013239598 | 2013-11-20 | ||
| JP2013-239598 | 2013-11-20 |
Related Child Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US15/037,875 A-371-Of-International US11003929B2 (en) | 2013-11-20 | 2014-11-11 | Helmet wearing determination method, helmet wearing determination system, helmet wearing determination apparatus, and program |
| US16/376,530 Continuation US10679078B2 (en) | 2013-11-20 | 2019-04-05 | Helmet wearing determination method, helmet wearing determination system, helmet wearing determination apparatus, and program |
| US17/226,316 Continuation US11816983B2 (en) | 2013-11-20 | 2021-04-09 | Helmet wearing determination method, helmet wearing determination system, helmet wearing determination apparatus, and program |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2015076152A1 true WO2015076152A1 (ja) | 2015-05-28 |
Family
ID=53179419
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2014/079825 WO2015076152A1 (ja) | 2013-11-20 | 2014-11-11 | ヘルメット着用判定方法、ヘルメット着用判定システム、ヘルメット着用判定装置及びプログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (4) | US11003929B2 (ja) |
| JP (4) | JP6512410B2 (ja) |
| AR (1) | AR098462A1 (ja) |
| WO (1) | WO2015076152A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106372662A (zh) * | 2016-08-30 | 2017-02-01 | 腾讯科技(深圳)有限公司 | 安全帽佩戴的检测方法和装置、摄像头、服务器 |
| CN111652120A (zh) * | 2020-06-01 | 2020-09-11 | 福建睿思特科技股份有限公司 | 一种基于stm32h7处理机的头盔识别设备 |
| CN111832461A (zh) * | 2020-07-07 | 2020-10-27 | 浙江工商大学 | 一种基于视频流的非机动车骑行人员头盔佩戴检测方法 |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015076152A1 (ja) * | 2013-11-20 | 2015-05-28 | 日本電気株式会社 | ヘルメット着用判定方法、ヘルメット着用判定システム、ヘルメット着用判定装置及びプログラム |
| US9769638B2 (en) * | 2015-11-22 | 2017-09-19 | United Arab Emirates University | Safety helmet and vehicle system, circuit and device |
| WO2020056677A1 (zh) * | 2018-09-20 | 2020-03-26 | 中建科技有限公司深圳分公司 | 一种用于建筑施工现场的违规检测方法、系统及设备 |
| US10885334B2 (en) * | 2018-11-30 | 2021-01-05 | Hua-Chuang Automobile Information Technical Center Co., Ltd. | Method and system for detecting object(s) adjacent to vehicle |
| US11730221B2 (en) * | 2019-01-12 | 2023-08-22 | Herutu Electronics Corporation | Apparatus for detecting wearing of body protection gear |
| CN110852170A (zh) * | 2019-10-12 | 2020-02-28 | 北京文安智能技术股份有限公司 | 一种人员安全帽的检测方法、装置及系统 |
| KR102221508B1 (ko) * | 2019-12-10 | 2021-03-02 | (주)지와이네트웍스 | 퍼스널 모빌리티용 스마트 헬멧 관리 서버 및 서버 운영 방법 |
| WO2021183552A1 (en) * | 2020-03-09 | 2021-09-16 | Glenn Karen B Z | Bicycle helmet warning system |
| CN112101288B (zh) * | 2020-09-25 | 2024-02-13 | 北京百度网讯科技有限公司 | 安全帽佩戴检测方法、装置、设备及存储介质 |
| CN112507935A (zh) * | 2020-12-17 | 2021-03-16 | 上海依图网络科技有限公司 | 一种图像检测的方法及装置 |
| KR102368127B1 (ko) * | 2021-05-13 | 2022-03-02 | 유니셈 (주) | 이륜차 무인 단속 시스템 |
| CN113486812A (zh) * | 2021-07-08 | 2021-10-08 | 浙江得图网络有限公司 | 一种骑行安全控制系统及控制方法 |
| KR102510765B1 (ko) * | 2022-01-04 | 2023-03-17 | 주식회사 아이에스앤로드테크 | 이륜차 단속 시스템 및 방법. |
| JP2023172536A (ja) | 2022-05-24 | 2023-12-06 | キヤノン株式会社 | 通信装置、通信制御方法、及びコンピュータプログラム |
| CN115393984A (zh) * | 2022-08-17 | 2022-11-25 | 宁波美喵科技有限公司 | 基于共享单车的头盔使用方法、装置、设备及存储介质 |
| CN115460502B (zh) * | 2022-11-11 | 2023-02-14 | 成都智元汇信息技术股份有限公司 | 一种基于缩小目标区域的戴耳机识别方法及系统 |
| KR102558936B1 (ko) * | 2022-12-27 | 2023-07-25 | 주식회사 아이에스앤로드테크 | 이륜차 단속 시스템 및 방법. |
| CN116523321B (zh) * | 2023-07-04 | 2024-02-02 | 深圳鸿祥源科技有限公司 | 一种基于云平台的智能头盔安防管控系统 |
| KR102656253B1 (ko) * | 2023-10-04 | 2024-04-11 | (주)디라직 | 번호 인식률을 극대화한 무인 교통 단속시스템 |
| KR102656252B1 (ko) * | 2023-10-04 | 2024-04-09 | (주)디라직 | 단속 정확성을 높인 무인 교통 단속시스템 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009180124A (ja) * | 2008-01-30 | 2009-08-13 | Honda Motor Co Ltd | 車両駆動制御装置 |
| JP2010211427A (ja) * | 2009-03-10 | 2010-09-24 | Omron Corp | 安全運転監視装置 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6437699A (en) | 1987-08-03 | 1989-02-08 | Nissei Kk | Method for discriminating kind of motorbicycle and device for executing said method |
| US20080234899A1 (en) * | 1992-05-05 | 2008-09-25 | Automotive Technologies International, Inc. | Vehicular Occupant Sensing and Component Control Techniques |
| US7868912B2 (en) * | 2000-10-24 | 2011-01-11 | Objectvideo, Inc. | Video surveillance system employing video primitives |
| US8331621B1 (en) * | 2001-10-17 | 2012-12-11 | United Toll Systems, Inc. | Vehicle image capture system |
| US7783135B2 (en) * | 2005-05-09 | 2010-08-24 | Like.Com | System and method for providing objectified image renderings using recognition information from images |
| US8600174B2 (en) * | 2005-09-28 | 2013-12-03 | Facedouble, Inc. | Method and system for attaching a metatag to a digital image |
| JP5041229B2 (ja) | 2007-12-07 | 2012-10-03 | ソニー株式会社 | 学習装置および方法、認識装置および方法、並びにプログラム |
| US8379917B2 (en) * | 2009-10-02 | 2013-02-19 | DigitalOptics Corporation Europe Limited | Face recognition performance using additional image features |
| ES2884374T3 (es) | 2009-12-25 | 2021-12-10 | Yamaha Motor Co Ltd | Método de determinación de características de conductor |
| AU2010257454B2 (en) * | 2010-12-24 | 2014-03-06 | Canon Kabushiki Kaisha | Summary view of video objects sharing common attributes |
| JP5851108B2 (ja) * | 2011-03-30 | 2016-02-03 | セコム株式会社 | 画像監視装置 |
| JP5691834B2 (ja) | 2011-05-20 | 2015-04-01 | 株式会社豊田中央研究所 | 画像識別装置及びプログラム |
| US9368028B2 (en) * | 2011-12-01 | 2016-06-14 | Microsoft Technology Licensing, Llc | Determining threats based on information from road-based devices in a transportation-related context |
| US9177130B2 (en) * | 2012-03-15 | 2015-11-03 | Google Inc. | Facial feature detection |
| US20160292516A1 (en) | 2013-11-20 | 2016-10-06 | Nec Corporation | Two-wheel vehicle riding person number determination method, two-wheel vehicle riding person number determination system, two-wheel vehicle riding person number determination apparatus, and program |
| WO2015076152A1 (ja) * | 2013-11-20 | 2015-05-28 | 日本電気株式会社 | ヘルメット着用判定方法、ヘルメット着用判定システム、ヘルメット着用判定装置及びプログラム |
| CN104200668B (zh) | 2014-07-28 | 2017-07-11 | 四川大学 | 一种基于图像分析的摩托车不戴头盔违章事件检测方法 |
| GB2560110B (en) | 2015-05-18 | 2019-08-28 | Roadmetric Ltd | Detection and documentation of tailgating and speeding violations |
| KR101936629B1 (ko) | 2018-01-19 | 2019-01-09 | 엘지전자 주식회사 | 차량 및 그 제어방법 |
| WO2021183552A1 (en) * | 2020-03-09 | 2021-09-16 | Glenn Karen B Z | Bicycle helmet warning system |
-
2014
- 2014-11-11 WO PCT/JP2014/079825 patent/WO2015076152A1/ja active Application Filing
- 2014-11-11 JP JP2015549086A patent/JP6512410B2/ja active Active
- 2014-11-11 US US15/037,875 patent/US11003929B2/en active Active
- 2014-11-19 AR ARP140104333A patent/AR098462A1/es active IP Right Grant
-
2019
- 2019-04-04 JP JP2019071796A patent/JP2019169155A/ja active Pending
- 2019-04-05 US US16/376,530 patent/US10679078B2/en active Active
-
2020
- 2020-12-23 JP JP2020213274A patent/JP7130895B2/ja active Active
-
2021
- 2021-04-09 US US17/226,316 patent/US11816983B2/en active Active
-
2022
- 2022-07-19 JP JP2022114800A patent/JP2022140519A/ja active Pending
-
2023
- 2023-10-05 US US18/377,000 patent/US20240029557A1/en active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009180124A (ja) * | 2008-01-30 | 2009-08-13 | Honda Motor Co Ltd | 車両駆動制御装置 |
| JP2010211427A (ja) * | 2009-03-10 | 2010-09-24 | Omron Corp | 安全運転監視装置 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106372662A (zh) * | 2016-08-30 | 2017-02-01 | 腾讯科技(深圳)有限公司 | 安全帽佩戴的检测方法和装置、摄像头、服务器 |
| CN111652120A (zh) * | 2020-06-01 | 2020-09-11 | 福建睿思特科技股份有限公司 | 一种基于stm32h7处理机的头盔识别设备 |
| CN111652120B (zh) * | 2020-06-01 | 2023-03-24 | 福建睿思特科技股份有限公司 | 一种基于stm32h7处理机的头盔识别设备 |
| CN111832461A (zh) * | 2020-07-07 | 2020-10-27 | 浙江工商大学 | 一种基于视频流的非机动车骑行人员头盔佩戴检测方法 |
| CN111832461B (zh) * | 2020-07-07 | 2024-02-06 | 浙江工商大学 | 一种基于视频流的非机动车骑行人员头盔佩戴检测方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20240029557A1 (en) | 2024-01-25 |
| JPWO2015076152A1 (ja) | 2017-03-16 |
| US10679078B2 (en) | 2020-06-09 |
| JP6512410B2 (ja) | 2019-05-15 |
| US20190236384A1 (en) | 2019-08-01 |
| JP2021051799A (ja) | 2021-04-01 |
| AR098462A1 (es) | 2016-05-26 |
| US11003929B2 (en) | 2021-05-11 |
| US20160292520A1 (en) | 2016-10-06 |
| JP2022140519A (ja) | 2022-09-26 |
| JP7130895B2 (ja) | 2022-09-06 |
| US11816983B2 (en) | 2023-11-14 |
| JP2019169155A (ja) | 2019-10-03 |
| US20210232835A1 (en) | 2021-07-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7130895B2 (ja) | ヘルメット着用判定方法、ヘルメット着用判定装置及びプログラム | |
| US10796171B2 (en) | Object recognition apparatus, object recognition method, and object recognition program | |
| US11417108B2 (en) | Two-wheel vehicle riding person number determination method, two-wheel vehicle riding person number determination system, two-wheel vehicle riding person number determination apparatus, and program | |
| JP5774770B2 (ja) | 車両周辺監視装置 | |
| JP6350145B2 (ja) | 顔向き検出装置及び車両用警告システム | |
| EP2908726B1 (en) | Method and device for detecting decreased attentiveness of vehicle driver | |
| JP2007249841A (ja) | 画像認識装置 | |
| WO2022027893A1 (zh) | 安全带佩戴检测方法、装置、电子设备、存储介质及程序 | |
| CN107924466A (zh) | 用于机动车辆的视觉系统和方法 | |
| KR101546893B1 (ko) | 졸음 운전 방지 시스템 | |
| JP2000127849A (ja) | 車両用後側方監視装置 | |
| JP2016192177A (ja) | 車両検出システム、車両検出装置、車両検出方法、及び車両検出プログラム | |
| JPWO2018190362A1 (ja) | 車両周囲の歩行者を検出する方法及び装置 | |
| Xiao et al. | Detection of drivers visual attention using smartphone | |
| Raut et al. | Helmet detection on two-wheeler riders using machine learning | |
| CN113887291A (zh) | 安全带检测方法及装置 | |
| US10945651B2 (en) | Arousal level determination device | |
| JP5692024B2 (ja) | 対象物変化検出装置および対象物変化検出方法 | |
| JP2013029933A (ja) | パターン認識装置 | |
| JP2000020686A (ja) | 車両用後側方監視装置 | |
| JP2000280858A (ja) | 車載機器制御装置および方法 | |
| CN117710946A (zh) | 基于车载摄像头的安全带使用识别方法、装置和存储介质 | |
| Naik et al. | Traffic Rule Violation Detection System using Surveillance Videos in real-time | |
| Choi et al. | In and out vision-based driver-interactive assistance system | |
| KR101292115B1 (ko) | 차량용 영상 시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 14864807 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2015549086 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15037875 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 14864807 Country of ref document: EP Kind code of ref document: A1 |