WO2014163076A1 - 静電容量型センサ、及び非線形出力の補正方法 - Google Patents
静電容量型センサ、及び非線形出力の補正方法 Download PDFInfo
- Publication number
- WO2014163076A1 WO2014163076A1 PCT/JP2014/059634 JP2014059634W WO2014163076A1 WO 2014163076 A1 WO2014163076 A1 WO 2014163076A1 JP 2014059634 W JP2014059634 W JP 2014059634W WO 2014163076 A1 WO2014163076 A1 WO 2014163076A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- acceleration
- movable electrode
- capacitive sensor
- correction
- electrode
- Prior art date
Links
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R35/00—Testing or calibrating of apparatus covered by the other groups of this subclass
- G01R35/005—Calibrating; Standards or reference devices, e.g. voltage or resistance standards, "golden" references
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/125—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values by capacitive pick-up
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/18—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration in two or more dimensions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P21/00—Testing or calibrating of apparatus or devices covered by the preceding groups
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R27/00—Arrangements for measuring resistance, reactance, impedance, or electric characteristics derived therefrom
- G01R27/02—Measuring real or complex resistance, reactance, impedance, or other two-pole characteristics derived therefrom, e.g. time constant
- G01R27/26—Measuring inductance or capacitance; Measuring quality factor, e.g. by using the resonance method; Measuring loss factor; Measuring dielectric constants ; Measuring impedance or related variables
- G01R27/2605—Measuring capacitance
Definitions
- the present invention relates to a capacitance type sensor for detecting acceleration and a method for correcting nonlinear output.
- an acceleration detection device that detects acceleration
- a capacitance type device as described in Patent Document 1, for example.
- This capacitance-type device detects acceleration by arranging a fixed electrode in the vicinity of the movable electrode and detecting a change in capacitance between the movable electrode and the fixed electrode.
- Patent Documents 1, 2, and 3 show that the relationship between the change in capacitance and the amount of displacement of the movable electrode is nonlinear. In Patent Documents 1, 2, and 3, it is described that since the displacement amount of the movable electrode is very small, the relationship between the change in capacitance and the displacement amount of the movable electrode can be regarded as linear.
- the acceleration sensors disclosed in Patent Documents 4 and 5 regard the relationship between the change in capacitance and the amount of displacement of the movable electrode as non-linear, and correct this non-linearity.
- the acceleration sensor disclosed in Patent Document 4 is a cylindrical three-axis acceleration sensor. This acceleration sensor detects acceleration for each of the three axes based on a change in capacitance between electrodes on the fixed disk and electrodes on the movable disk facing each other in the extending direction of the cylinder.
- the acceleration sensor of Patent Document 5 detects the acceleration in one direction.
- the present inventor examined the construction of a capacitive sensor having a movable electrode and a plurality of fixed electrodes facing the movable electrode from different directions.
- the inventor has studied a method of accurately detecting acceleration in each of a plurality of directions in this capacitive sensor.
- the present invention has been made in view of the above circumstances, and an object thereof is to provide a movable electrode and a plurality of fixed electrodes facing the movable electrode from different directions, respectively, in a plurality of directions. It is an object of the present invention to provide a capacitance type sensor and a correction method capable of accurately detecting acceleration.
- the capacitive sensor includes a movable electrode, a support, a beam member, a first fixed electrode, a second fixed electrode, a detection unit, and a correction unit.
- the beam member is attached in a state where the movable electrode is movable to the support.
- the first fixed electrode is opposed to the movable electrode from the first direction.
- the second fixed electrode is opposed to the movable electrode from a second direction different from the first direction.
- a detection part detects the change of the electrostatic capacitance which arises between a movable electrode and each fixed electrode.
- the correction unit corrects the detection result of the detection unit and generates an acceleration signal indicating the acceleration.
- the non-linear output correction method is a method of correcting the output of the detection unit in the above-described capacitance type sensor. First, using the distance between the movable electrode and the fixed electrode and the spring constant of the beam member, a theoretical formula for calculating the capacitance from the acceleration is calculated. And the output of a detection part is correct
- acceleration can be accurately detected in each of a plurality of directions in a capacitive sensor having a movable electrode and a plurality of fixed electrodes facing the movable electrode from different directions.
- FIG. 2 is a cross-sectional view taken along the line AA ′ of FIG. It is a figure which shows the circuit structure of the detection part of an electrostatic capacitance type sensor. It is a figure which shows a motion of a movable electrode when the acceleration of the X direction in FIGS. 1, 2 is added to the movable electrode of an electrostatic capacitance type sensor. It is a figure which shows the relationship between the output from a detection part, and the acceleration G.
- FIG. It is a figure which shows the output (1st acceleration signal) after correct
- FIG. 5 shows the circuit structure of the detection part of an electrostatic capacitance type sensor. It is a figure which shows a motion of a movable electrode when the acceleration of the Z direction in FIG. 2 is added to the movable electrode of an electrostatic capacitance type sensor. It is a figure which shows the relationship between the output from a detection part, and the acceleration G. FIG. It is a figure which shows the output (2nd acceleration signal) after correct
- FIG. 14 is a diagram showing a relationship between an output ⁇ C and an acceleration G when the initial deviation d ofst ⁇ 0 in FIG. 13. It is a figure showing the range of the acceleration which can be applied with respect to the housing
- each component of the detection unit 200 and the correction unit 300 is not a hardware unit configuration but a functional unit block.
- the detection unit 200 and the correction unit 300 are an arbitrary computer CPU, memory, a program loaded in the memory, a storage medium such as a hard disk for storing the program, and an interface for network connection. Realized by combination. There are various modifications to the implementation method.
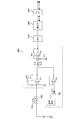
- FIG. 1 is a plan view showing the configuration of the capacitive sensor 10 according to the first embodiment.
- FIG. 2 is a cross-sectional view taken along the line AA ′ of FIG.
- the capacitive sensor 10 according to this embodiment includes a movable electrode 110, a support 120, a beam member 130, fixed electrodes 141 and 142, a detection unit 200, and a correction unit 300.
- the beam member 130 functions as a spring
- the movable electrode 110 is attached to the support 120 in a movable state.
- the detection unit 200 detects a change in capacitance that occurs between the movable electrode 110 and the fixed electrodes 141 and 142.
- the correction unit 300 corrects the detection result of the detection unit 200 and generates an acceleration signal indicating the acceleration.
- the acceleration signal is a value obtained by correcting the detection result of the detection unit 200. For this reason, the relationship between the change in capacitance and the acceleration signal can be made nonlinear. Therefore, the acceleration can be detected with high accuracy.
- the capacitive sensor 10 will be described in detail.
- the movable electrode 110 has a flat plate shape, and its planar shape is a rectangle.
- the fixed electrode 141 (first fixed electrode) is opposed to the first side (edge) of the movable electrode 110, and the fixed electrode is disposed on the side of the movable electrode 110 facing the first side (second side).
- 142 (second fixed electrode) faces each other.
- the fixed electrodes 141 and 142 are opposed to each other via the movable electrode 110, and are disposed at positions that are symmetrical with respect to each other with respect to a line that passes through the center of the movable electrode 110 and is parallel to the first side. .
- each side of the movable electrode 110 is linear. However, these sides may be comb-like. In this case, the sides of the fixed electrodes 141 and 142 facing the movable electrode 110 are also comb-like and are arranged so as to engage with the movable electrode 110.
- the support 120 is provided so as to surround the four sides of the movable electrode 110. Specifically, the support 120 has a rectangular opening. The four sides of the opening are parallel to the four sides of the movable electrode 110.
- Four beam members 130 are provided. One end of each beam member 130 is attached to the corner of the movable electrode 110, and the other end is attached to the corner of the opening of the support 120.
- the arrangement of the beam members 130 is not limited to the example shown in this figure.
- the capacitive sensor 10 includes fixed electrodes 151 and 152.
- the fixed electrode 151 faces the third side of the movable electrode 110
- the fixed electrode 152 faces the side of the movable electrode 110 that faces the third side (fourth side).
- the capacitive sensor 10 is formed using an SOI (Silicon On On Insulator) substrate 160.
- This SOI substrate 160 includes a lower silicon support layer 161, a silicon oxide layer 162 formed on the silicon support layer 161, and an active silicon layer 163 formed on the silicon oxide layer 162. .
- the silicon support layer 161 and the silicon oxide layer 162 are removed by etching, leaving portions (supports 120) surrounding the four sides of the movable electrode 110. In this way, the space portion 164 is formed in the center portion of the silicon support layer 161 and the silicon oxide layer 162.
- the upper active silicon layer 163 is partially removed by, for example, anisotropic dry etching.
- the movable electrode 110 located at the center from the active silicon layer 163, the beam member 130 (elastic member) extending outward from the four corners diagonally from the four corners of the movable electrode 110, and four of the movable electrode 110.
- Fixed electrodes 141, 142, 151, and 152 are formed to face the sides with a predetermined interval.
- the capacitance type sensor 10 has protective members 172 and 174.
- the protection members 172 and 174 are formed using glass, for example.
- the protection member 172 covers the surface (front surface) of the substrate 160 where the movable electrode 110 is formed, and the protection member 174 covers the back surface of the substrate 160.
- the protection members 172 and 174 are separated from the movable electrode 110 and the like except for the edges.
- a fixed electrode 180 (third fixed electrode) is formed on the surface of the protective member 172 facing the movable electrode 110. That is, the fixed electrode 180 faces the movable electrode 110 from a different direction from the fixed electrodes 141, 142, 151, and 152.
- the fixed electrodes 141 and 142 are opposed to the movable electrode 110 from the first direction (X direction in FIGS. 1 and 2), and the fixed electrode 180 is movable from the second direction (Z direction in FIG. 2). Opposite the electrode 110.
- the second direction is a direction facing the front surface or the back surface of the movable electrode 110.
- the correction unit 300 changes the electrostatic capacity (first electrostatic capacity) between the movable electrode 110 and the fixed electrode 141 and the electrostatic capacity (second electrostatic capacity) between the movable electrode 110 and the fixed electrode 142. )
- the component perpendicular to the first side of the movable electrode 110 (the component in the X direction in FIGS. 1 and 2: the acceleration in the first direction) is detected from the acceleration applied to the movable electrode 110 and detected.
- a first acceleration signal indicating the magnitude of acceleration is output.
- the capacitance between the movable electrode 110 and the fixed electrode 141 changes in the opposite direction to the capacitance between the movable electrode 110 and the fixed electrode 142.
- side of the movable electrode 110 among the accelerations applied to the movable electrode 110 among the capacitive sensors 10 has a differential structure symmetrical in the X direction. .
- the correction unit 300 determines the acceleration applied to the movable electrode 110 based on the change in capacitance between the movable electrode 110 and the fixed electrode 151 and the change in capacitance between the movable electrode 110 and the fixed electrode 152. Among these, a component parallel to the first side of the movable electrode 110 (component in the Y direction in FIG. 1) is detected, and an acceleration signal indicating the magnitude of the detected acceleration is output.
- the capacitive sensor 10 has a differential structure that is symmetric in the Y direction when detecting a component parallel to the first side of the movable electrode 110 out of the acceleration applied to the movable electrode 110.
- the correction unit 300 generates a component perpendicular to the movable electrode 110 (acceleration applied to the movable electrode 110 based on a change in capacitance (third capacitance) between the movable electrode 110 and the fixed electrode 180). 2), and a second acceleration signal indicating the magnitude of the detected acceleration is output.
- the capacitive sensor 10 has an asymmetric structure in the Z direction when detecting a component perpendicular to the movable electrode 110 out of the acceleration applied to the movable electrode 110.
- the correction method used by the correction unit 300 differs depending on the combination of the movable electrode 110 and the fixed electrode. Specifically, the correction method used when detecting the component perpendicular to the movable electrode 110 (the component in the Z direction in FIG. 2) among the accelerations applied to the movable electrode 110 is movable among the accelerations applied to the movable electrode 110. This is different from the correction method used when detecting a component perpendicular to the first side of the electrode 110 (component in the X direction in FIGS. 1 and 2).
- correction methods are set as follows, for example. First, using the distance between the movable electrode and the fixed electrode and the spring constant of the beam member, a theoretical formula for calculating the capacitance from the acceleration is calculated. Then, the correction method is set by using the inverse transformation formula of the theoretical formula.
- the correction method used by the correction unit 300 is stored in the correction data storage unit 302.
- the correction data storage unit 302 stores, for example, a correction table.
- the correction unit 300 generates an acceleration signal based on a correction formula using this correction table.
- the correction unit 300 calculates a broken line as an approximate expression of the correction expression by connecting two adjacent points among a plurality of points stored in the correction table with a straight line. In this way, the calculation load applied to the correction unit 300 can be reduced.
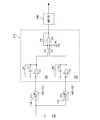
- FIG. 3 is a diagram illustrating a circuit configuration of the detection unit 210 included in the detection unit 200 of the capacitance type sensor 10.
- the detection unit 210 is connected to the fixed electrodes 141 and 142.
- the detection unit 200 includes a circuit connected to the fixed electrodes 151 and 152 separately from the detection unit 210. This circuit also has the same configuration as that of the detection unit 210.
- a DC voltage is applied to the movable electrode 110.
- the fixed electrode 141 is connected to the negative input terminal of the differential amplifier Q1.
- the positive input terminal of the differential amplifier Q1 is grounded.
- a resistor R1 and a capacitor C1 are connected in parallel to the negative input terminal of the differential amplifier Q1 and the output terminal of the differential amplifier Q1.
- the fixed electrode 142 is connected to the negative input terminal of the differential amplifier Q2.
- the positive input terminal of the differential amplifier Q2 is grounded.
- a resistor R2 and a capacitor C2 are connected in parallel to the negative input terminal of the differential amplifier Q2 and the output terminal of the differential amplifier Q2.
- the output terminal of the differential amplifier Q1 is input to one input terminal (for example, the negative side input terminal) of the differential amplifier Q3 via the resistor R3, and the output terminal of the differential amplifier Q2 is input via the resistor R4. Is input to the other input terminal (for example, the positive input terminal) of the differential amplifier Q3.
- a resistor R5 is connected in parallel to one input terminal of the differential amplifier Q3 and the output terminal of the differential amplifier Q3.
- the resistor R4 and the other input terminal of the differential amplifier Q3 are grounded via a resistor R6.
- the output of the differential amplifier Q3 is input to the correction unit 300.
- the above-described circuits of the differential amplifiers Q1 and Q2 are charge / voltage conversion circuits, which convert the capacitance between the electrodes connected to each other into a voltage signal and output it.
- the circuit of the differential amplifier Q3 is a difference calculation circuit, and outputs the difference result of (Q2-Q1).
- the output is expressed as capacitance [F] for ease of expression.
- the voltage signal [V] converted by the Q1 and Q2 is output.
- FIG. 4 shows the movement of the movable electrode 110 when acceleration in the X direction in FIGS. 1 and 2 is applied to the movable electrode 110 of the capacitive sensor 10.
- the distance d 1 between the movable electrode 110 and the fixed electrode 141 is (d 0 ⁇ d)
- the distance d 2 between the movable electrode 110 and the fixed electrode 142 is (d 0 + ⁇ d).
- Equation (1) the capacitance C 1 between the movable electrode 110 and the fixed electrode 141 is obtained by Equation (1).
- ⁇ is a dielectric constant
- S 1 is an area of a portion where the movable electrode 110 and the fixed electrode 141 are opposed to each other.
- Equation (2) the capacitance C 2 between the movable electrode 110 and the fixed electrode 142 is obtained by Equation (2).
- S 2 is the area of a portion fixed electrode 142 and the movable electrode 110 is opposed.
- Equation (4) becomes the following Equation (5).
- the correction unit 300 performs correction based on the equation (6) and calculates the first acceleration signal.
- the specific values of the coefficients ⁇ XY and ⁇ XY in the equation (6) are as follows: the area of each electrode of the design value of the capacitive sensor 10, the initial spacing d 0 between the electrodes, the dielectric constant between the electrodes, and the weight It can be obtained by using numerical values such as mass and beam spring constant.
- Specific values of the coefficients ⁇ XY and ⁇ XY include the area of each electrode of the capacitive sensor 10, the initial distance d 0 between the electrodes, the dielectric constant between the electrodes, the mass of the weight, the spring constant of the beam, etc. A numerical value obtained as a result of actual measurement may be used.
- this specific numerical value is obtained by applying a predetermined acceleration (preferably a plurality of accelerations) to each capacitance type sensor 10 and calculating an actual measurement value of the output from the capacitance type sensor 10 at that time (6) It is also possible to calculate by fitting. For the fitting at this time, for example, a least square method can be used. However, the fitting is not limited to the least square method. Data indicating the coefficients ⁇ XY and ⁇ XY is stored in the correction data storage unit 302. The data stored in the correction data storage unit 302 can be rewritten.
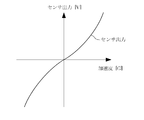
- FIG. 5 is a diagram showing the relationship between the output ⁇ C from the detection unit 210 and the acceleration G. As shown in the figure, the relationship between the output ⁇ C from the detection unit 210 and the acceleration G is non-linear.
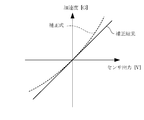
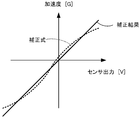
- FIG. 6 is a diagram showing a correction formula shown in Formula (6) and an output (first acceleration signal) after the output ⁇ C shown in FIG. 5 is corrected by this correction formula. As shown in the figure, by performing correction by the correction unit 300, the relationship between the output of the correction unit 300 and the acceleration G can be made linear.
- the correction unit 300 may be provided with different correction methods depending on whether the acceleration is positive or negative. For example, different correction methods are set by performing the above-mentioned fitting separately when the acceleration is positive and when the acceleration is negative. In this way, the accuracy of correction by the correction unit 300 increases.
- the correction unit 300 performs the same correction as described with reference to FIG.
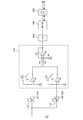
- FIG. 7 is a diagram illustrating a circuit configuration of the detection unit 220 included in the detection unit 200 of the capacitance type sensor 10.
- the detection unit 220 is connected to the fixed electrode 180.
- a DC voltage is applied to the movable electrode 110.
- the fixed electrode 180 is connected to the negative input terminal of the differential amplifier Q11.
- the positive input terminal of the differential amplifier Q11 is grounded.
- a resistor R11 and a capacitor C11 are connected in parallel to the negative input terminal of the differential amplifier Q11 and the output terminal of the differential amplifier Q11.
- the output terminal of the differential amplifier Q11 is input to one input terminal (for example, a negative input terminal) of the differential amplifier Q13 via the resistor R12.
- the output terminal of the differential amplifier Q12 is connected to the other input terminal (for example, the positive input terminal) of the differential amplifier Q13 via the resistor R13.
- One input terminal (eg, negative input terminal) of the differential amplifier Q12 is connected to the output terminal of the differential amplifier Q12, and the other input terminal (eg, positive input terminal) of the differential amplifier Q12 is connected to the differential amplifier Q12.
- the reference voltage is applied via the variable resistor VR11.
- a resistor R14 is connected in parallel to one input terminal of the differential amplifier Q13 and the output terminal of the differential amplifier Q13.
- the resistor R13 and the other input terminal of the differential amplifier Q13 are grounded via a resistor R15.
- the output of the differential amplifier Q13 is input to the correction unit 300.
- FIG. 8 shows the movement of the movable electrode 110 when acceleration in the Z direction in FIG. 2 is applied to the movable electrode 110 of the capacitive sensor 10.
- the initial interval between the movable electrode 110 and the fixed electrode 180 (the electrode interval when the acceleration is 0) is d 0 .
- the distance d 3 between the movable electrode 110 and the fixed electrode 180 becomes (d 0 ⁇ d 2 ).
- Equation (7) the capacitance C 3 between the fixed electrode 180 and the movable electrode 110 is obtained by Equation (7).
- ⁇ is a dielectric constant
- S 3 is an area of a portion where the movable electrode 110 and the fixed electrode 180 are opposed to each other.
- Equation (8) can be transformed into Equation (9).
- This equation (9) is a theoretical equation for calculating the acceleration a.
- the correcting unit 300 performs correction based on the equation (11) and calculates the second acceleration signal. Then, specific numerical values of the coefficients ⁇ z and ⁇ z in the equation (11) can be obtained by the same method as the above-described coefficients ⁇ xy and ⁇ xy .
- FIG. 9 is a diagram showing the relationship between the output ⁇ C from the detection unit 220 and the acceleration G. As shown in the figure, the relationship between the output ⁇ C from the detection unit 220 and the acceleration G is non-linear.
- FIG. 10 is a diagram showing a correction formula shown in Formula (11) and an output (second acceleration signal) after the output ⁇ C shown in FIG. 9 is corrected with this correction formula. As shown in the figure, by performing correction by the correction unit 300, the relationship between the output of the correction unit 300 and the acceleration G can be made linear.
- the correction unit 300 may provide a common correction method when the acceleration is positive and when the acceleration is negative.
- a common correction method is set by performing the fitting described above without dividing the acceleration when the acceleration is positive and when the acceleration is negative.
- the correction unit 300 corrects the output of the detection unit 200. For this reason, the acceleration signal output from the capacitive sensor 10 has high accuracy.
- the correction method used by the correction unit 300 is changed according to the positional relationship (combination type) between the movable electrode 110 and the fixed electrode. Specifically, the correction unit 300 makes a correction method applied to the output from the fixed electrode 180 different from the correction method applied to the output from the fixed electrodes 141 and 142. For this reason, the capacitive sensor 10 can detect accelerations in a plurality of directions (for example, the X direction, the Y direction, and the Z direction) with high accuracy.
- the correction unit 300 calculates a broken line as an approximate expression of the correction formula by connecting two adjacent points among a plurality of points stored in the correction table with a straight line, the correction unit 300 performs the calculation. Arithmetic processing can be reduced.
- FIG. 11 and 12 are diagrams illustrating a functional configuration of the capacitive sensor 10 according to the second embodiment. 11 corresponds to FIG. 3 in the first embodiment, and FIG. 12 corresponds to FIG. 7 in the first embodiment.
- the capacitive sensor 10 according to the present embodiment has the same configuration as that of the capacitive sensor 10 according to the first embodiment, except that the AD sensor 410 and the interface 420 are provided.
- the AD conversion unit 410 is provided between the detection unit 200 and the correction unit 300, and converts an output (analog signal) from the detection unit 200 into a digital signal.
- the correction unit 300 performs correction processing by digitally processing the digital signal output from the AD conversion unit 410.
- the interface 420 is an interface that connects an external device (for example, a computer) of the capacitive sensor 10 and the correction unit 300. Information stored in the correction data storage unit 302 of the correction unit 300 can be rewritten via the interface 420.
- the same effect as that of the first embodiment can be obtained.
- amendment part 300 performs a digital process
- amendment part 300 can be performed by a program, for example.
- the information stored in the correction data storage unit 302 of the correction unit 300 can be rewritten via the interface 420, each capacitance type sensor 10 has the capacitance type sensor 10. Optimal correction data reflecting individual differences can be set.
- FIG. 1 A plan view showing the configuration of the capacitive sensor 10 according to the third embodiment is shown in FIG. 1, similarly to the capacitive sensor 10 according to the first embodiment.
- FIG. 2 shows the AA ′ cross-sectional view of FIG.
- the circuit configuration of the detection unit 210 and the circuit configuration of the detection unit 220 included in the detection unit 200 of the capacitive sensor 10 according to the third embodiment are the same as those in the first embodiment, respectively, as in FIG. And is represented in FIG.
- the distance between the fixed electrode 141 and the movable electrode 110 and the distance between the fixed electrode 142 and the movable electrode 110 are deviated from the design values ( Offset component).
- the design value refers to the distance between the fixed electrode 141 and the movable electrode 110 and the distance between the fixed electrode 142 and the movable electrode 110, both of which are predetermined values and equal values. Therefore, the movable electrode 110 is designed to be positioned at the center between the fixed electrode 141 and the fixed electrode 142.
- the initial state means a state in which the acceleration applied to the capacitive sensor 10 is 0G.
- the above-described deviation occurring in the initial state is referred to as initial deviation.
- the initial deviation corresponds to a manufacturing error that occurs in the actually manufactured capacitive sensor 10.
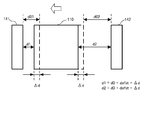
- FIG. 13 is a diagram illustrating the positional relationship between the fixed electrodes 141 and 142 and the movable electrode 110 in the initial state of the capacitive sensor 10 in the X direction in FIGS.
- d 0 is a design value of the distance between the fixed electrode 141 and the movable electrode 110 and the distance between the fixed electrode 142 and the movable electrode 110.
- d ofst represents the size of the initial deviation.
- the distance d 01 between the movable electrode 110 and the fixed electrode 141 is d 0 -d ofst .
- the capacitance C 1 between the movable electrode 110 and the fixed electrode 141 is obtained by Expression (12).
- ⁇ is a dielectric constant
- S 1 is an area of a portion where the movable electrode 110 and the fixed electrode 141 are opposed to each other.
- the distance d 02 between the fixed electrode 142 and the movable electrode 110 is d 0 + d ofst . Therefore, the capacitance C 2 between the movable electrode 110 and the fixed electrode 142 is obtained by the equation (13).
- S 2 is the area of a portion fixed electrode 142 and the movable electrode 110 is opposed.
- S 1 is equal to S 2.
- FIG. 14 shows the movement of the movable electrode 110 when acceleration in the X direction in FIGS. 1 and 2 is applied to the movable electrode 110 of the capacitive sensor 10.
- the initial distance d 01 between the movable electrode 110 and the fixed electrode 141 is (d 0 -d ofst ). Therefore, the electrode interval d 1 when the movable electrode 110 moves to the left by ⁇ d is (d 0 ⁇ d ofst ⁇ d).
- the electrode interval d 02 between the movable electrode 110 and the fixed electrode 142 is (d 0 + d ofst )
- the electrode interval d 2 when the movable electrode 110 moves to the left by ⁇ d is (d 0 + d ofst + ⁇ d).
- Equation (17) is a theoretical equation for calculating the acceleration a.
- Formula (17) can be transformed into the following Formula (18).
- the correction unit 300 of the third embodiment performs correction based on the equation (19) and calculates the first acceleration signal.
- the coefficient alpha XY in equation (19), beta XY, specific numerical values of the gamma XY, the area of each electrode in the capacitance type sensor 10, the initial spacing d 0 of the electrodes, the electrodes initial offset d ofst It can be determined using numerical values such as the dielectric constant between the electrodes, the mass of the movable electrode, and the spring constant of the beam. These values may be design values or actually measured values. Further, it may be a value calculated by a predetermined method.
- the predetermined method for calculating these values is, for example, “adding a predetermined acceleration (preferably a plurality of accelerations) to the capacitance side sensor 10, and the output from the capacitance side sensor 10 at that time” Is calculated by fitting the actual measured value of (2) to the equation (19).
- a least square method can be used for the fitting at this time.
- the fitting is not limited to the least square method.
- Data of the coefficients ⁇ XY , ⁇ XY , and ⁇ XY is stored in the correction data storage unit 302. The data stored in the correction data storage unit 302 can be rewritten.
- the correction unit 300 performs the same correction as described with reference to FIGS. 13 and 14.
- the relationship between the output ⁇ C and the acceleration G (X direction or Y direction) when the correction unit 300 of the third embodiment does not perform correction is represented in FIG.
- the relationship between the output ⁇ C and the acceleration G when the correction unit 300 performs the correction based on the equation (19) is represented in FIG. 15 and 16 include the initial deviation d ofst of the electrodes, and thus it can be seen that the inflection point is shifted from the origin with respect to FIGS. 5 and 6 of the first embodiment.
- the correction unit 300 of the third embodiment performs the correction based on the equation (19), so that the relationship between the output ⁇ C of the correction unit 300 and the acceleration G is linear even when the inflection point is deviated from the origin. be able to.
- FIG. 17 is a diagram showing the positional relationship between the movable electrode 110 and the fixed electrode 180 in the initial state with respect to the Z direction in FIG. 2 of the capacitive sensor 10.
- an initial deviation (offset component) having a magnitude d ofst2 from a predetermined design value is generated in the distance between the movable electrode 110 and the fixed electrode 180.
- d 0 is a design value of the distance between the movable electrode 110 and the fixed electrode 180.
- the initial deviation of the magnitude d ofst2 corresponds to a manufacturing error that occurs in the actually manufactured capacitive sensor 10.
- the capacitance C 5 between the movable electrode 110 and the fixed electrode 180 is obtained by the equation (20).
- ⁇ is a dielectric constant
- S 3 is an area of a portion where the movable electrode 110 and the fixed electrode 180 are opposed to each other.
- FIG. 18 shows the movement of the movable electrode 110 when acceleration in the Z direction in FIG. 2 is applied to the movable electrode 110 of the capacitive sensor 10.
- the movable electrode 110 has moved up by ⁇ d 2 . Since the initial interval d 03 between the movable electrode 110 and the fixed electrode 180 is (d 0 -d ofst2 ), the electrode interval d 3 when the movable electrode 110 moves upward by ⁇ d 2 is (d 0 -d ofst 2 - ⁇ d). 2 ).
- Equation (22) can be transformed into Equation (23).
- Equation (23) is a theoretical equation for calculating the acceleration a.
- the correcting unit 300 performs correction based on the equation (25) and calculates a second acceleration signal. Then, specific numerical values of the coefficients ⁇ Z and ⁇ Z in Expression (25) can be obtained by the same method as the coefficients ⁇ XY , ⁇ XY , and ⁇ XY in Expression (19) described above.
- the relationship between the output ⁇ C and the acceleration G (Z direction) when the correction unit 300 of the third embodiment does not perform correction is represented in FIG. 9 as in the case of the first embodiment. Further, the relationship between the output ⁇ C and the acceleration G when the correction unit 300 performs the correction based on the expression (25) is expressed in FIG. 10 as in the case where the correction unit 300 performs the correction in the first embodiment.
- the initial deviation (manufacturing error) from the design value in the distance between the fixed electrode 141 and the movable electrode 110 and the distance between the fixed electrode 142 and the movable electrode 110 is corrected in consideration of the initial deviation.
- the correction unit 300 of the present embodiment even when an initial deviation (manufacturing error) from the design value occurs in the distance between the fixed electrode 180 and the movable electrode 110, the initial deviation is taken into consideration. Thus, the output of the detection unit 200 is corrected. Therefore, even when an initial deviation (manufacturing error) from such a design value occurs in the capacitive sensor 10, the same effect as that provided by the correction unit 300 of the first embodiment is brought about.
- the correction unit 300 according to the fourth embodiment is illustrated on the movable electrode 110 of the capacitive sensor 10 using a theoretical formula obtained based on a different concept from the theoretical formula used by the correction unit 300 according to the third embodiment.
- the output ⁇ C when the acceleration in the X direction (or Y direction) in 1 and 2 is applied is corrected.
- FIG. 5 is a diagram illustrating the relationship between the output ⁇ C from the detection unit 210 and the acceleration G (X direction or Y direction).
- Equation (26) can be transformed into the following Equation (27). .
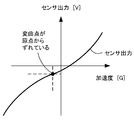
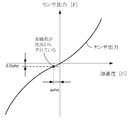
- FIG. 19 is a diagram showing the relationship between the output ⁇ C and the acceleration G when the initial deviation d ofst ⁇ 0 in FIG.
- the inflection point of the graph is deviated from the origin due to the initial shift d ofst .
- a deviation from the origin relating to the acceleration a (hereinafter referred to as an acceleration deviation) is denoted as a ofst
- a deviation from the origin relating to the output ⁇ C (hereinafter referred to as an output deviation) is denoted as ⁇ C ofst .
- equation (32) a theoretical equation for calculating acceleration a can be obtained as in equation (32).
- AA - ⁇ XY ⁇ ⁇ C + ⁇ XY 2 ⁇ ⁇ C + ⁇ XY ⁇ ⁇ XY
- BB 2 ⁇ XY ⁇ ⁇ XY ⁇ ⁇ C-2 ⁇ XY 3 ⁇ ⁇ C- ⁇ XY ⁇ ⁇ XY - ⁇ XY ⁇ ⁇ XY 2
- CC ⁇ XY 2 ⁇ ⁇ C-2 ⁇ XY ⁇ ⁇ XY 2 ⁇ ⁇ C + ⁇ XY 4 ⁇ ⁇ C.
- the correction unit 300 performs correction based on the equation (32) and calculates the first acceleration signal. Then, specific numerical values of the coefficients ⁇ XY , ⁇ XY , and ⁇ XY in the equation (32) can be obtained by the same method as the coefficients ⁇ XY , ⁇ XY , and ⁇ XY of the equation (19) described above. .
- FIG. 20 is a diagram showing the range of acceleration that can be applied to the casing of the capacitive sensor 10 using gravitational acceleration.
- Fig.20 (a) represents a standard installation state. In the standard installation state, it is assumed that the acceleration applied to the casing of the capacitive sensor 10 is 0 G in all directions of the X axis, the Y axis, and the Z axis.
- FIG. 20B is a diagram illustrating a case where acceleration is applied to the X-axis direction of the casing by tilting the casing.
- the range of acceleration applied with respect to the X-axis direction of the housing is a range of acceleration applied when the housing is tilted from ⁇ 90 degrees to +90 degrees around the Y axis.
- an acceleration of ⁇ 1 G is applied to the X axis direction of the casing.
- +90 degrees around the Y axis an acceleration of + 1G is applied to the X axis direction of the casing. Therefore, the range of acceleration applied to the X-axis direction of the housing by gravitational acceleration is in the range of ⁇ 1G to + 1G.
- FIG. 20C is a diagram illustrating a case where acceleration is applied to the Y-axis direction of the casing by tilting the casing.
- the range of acceleration applied with respect to the Y-axis direction of the housing is a range of acceleration applied when the housing is tilted from ⁇ 90 degrees to +90 degrees around the X axis.
- an acceleration of ⁇ 1 G is applied to the Y axis direction of the casing.
- an acceleration of +1 G is applied to the Y axis direction of the casing. Therefore, the range of acceleration applied to the Y-axis direction of the housing by gravitational acceleration is in the range of ⁇ 1G to + 1G.
- FIG. 20D is a diagram illustrating a case where acceleration is applied to the Z-axis direction of the casing by tilting the casing.
- the range of acceleration applied to the Z-axis direction of the casing is the range of acceleration applied when the casing is tilted from 0 degrees to 180 degrees about the Y axis.
- ⁇ 2 G acceleration is applied to the Z axis direction of the case.
- the range of acceleration applied to the casing in the Z-axis direction by gravitational acceleration is in the range of ⁇ 2G to 0G.
- the ranges of acceleration applied in the X direction, Y direction, and Z direction of the casing are ⁇ 1G to + 1G, ⁇ 1G to + 1G, and ⁇ 2G to 0G, respectively.
- an actual measured value of the applied acceleration is obtained using gravitational acceleration, and the measured value To fit the theoretical equation.
- the housing may be attached to a table tilted at a predetermined angle so that a desired acceleration within the above range is applied to the housing, and the sensor output at that time may be measured.
- the sensor output is measured by changing the setting state of the casing so that the range of acceleration applied to the casing extends from positive to negative. Preferably it is done. This is because an inflection point exists in the change of the sensor output as shown in FIG. 5, FIG. 15, and FIG. If measurement is performed with positive and negative acceleration applied to the housing in a balanced manner, an initial deviation from the design value occurs in the interval between the movable electrode 110 and the fixed electrodes 141 and 142 (or the fixed electrodes 151 and 152). Each coefficient of the theoretical formula of acceleration a at can be obtained with high accuracy.
- the range of acceleration applied to the housing may be either positive or negative. This is because, as shown in FIG. 9, there is no inflection point in the change in the sensor output, so even if the acceleration is applied to the housing in either positive or negative range and measured, the theoretical formula of acceleration a This is because each coefficient can be obtained with high accuracy.
- the acceleration range for obtaining actual measurement results is not limited to the above range.
- an actual measurement result of both positive and negative acceleration ranges is inevitably obtained, and the result may be used as it is for fitting.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Pressure Sensors (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
Abstract
Description
図1は、第1の実施形態に係る静電容量型センサ10の構成を示す平面図である。図2は、図1のA-A´断面図である。本実施形態に係る静電容量型センサ10は、可動電極110、支持体120、梁部材130、固定電極141,142、検出部200、及び補正部300を備えている。梁部材130はバネとして機能し、可動電極110を支持体120に移動可能な状態で取り付けている。検出部200は、可動電極110と固定電極141,142の間で生じる静電容量の変化を検出する。そして補正部300は、検出部200の検出結果を補正して加速度を示す加速度信号を生成する。











図11及び図12は、第2の実施形態に係る静電容量型センサ10の機能構成を示す図である。図11は第1の実施形態における図3に対応しており、図12は第1の実施形態における図7に対応している。本実施形態に係る静電容量型センサ10は、AD変換部410及びインターフェース420を備えている点を除いて、第1の実施形態に係る静電容量型センサ10と同様の構成である。
第3の実施形態に係る静電容量型センサ10の構成を示す平面図は、第1の実施形態に係る静電容量型センサ10と同様に、図1で表される。また、第3の実施形態の場合も第1の実施形態の場合と同様に、図2によって、図1のA-A´断面図が表される。さらに、第3の実施形態に係る静電容量型センサ10の検出部200が有する検出部210の回路構成と検出部220の回路構成はそれぞれ、第1の実施形態の場合と同様に、図3と図7で表される。














第4の実施形態では、第3の実施形態とは異なる考え方(アプローチ)によりX方向(もしくはY方向)の出力ΔCを表す理論式を求める方法を示す。







第5の実施形態として、補正部300が補正に用いる加速度aの理論式(逆変換式)の係数を定める方法を示す。
Claims (18)
- 可動電極と、
支持体と、
前記可動電極を前記支持体に移動可能な状態で取り付ける梁部材と、
前記可動電極と第1の方向から対向している第1の固定電極と、
前記可動電極と前記第1の方向とは異なる第2の方向から対向している第2の固定電極と、
前記可動電極と各前記固定電極の間で生じる静電容量の変化を検出する検出部と、
前記検出部の検出結果を補正して加速度を示す加速度信号を生成する補正部と、
を備える静電容量型センサ。 - 請求項1に記載の静電容量型センサにおいて、
前記固定電極と前記可動電極の組み合わせは複数種類あり、
前記補正部は、前記組み合わせの種類ごとに、互いに異なる補正方法に基づいて前記補正を行う静電容量型センサ。 - 請求項2に記載の静電容量型センサにおいて、
前記可動電極を介して前記第1の方向から前記第1の固定電極と対向している第3の前記固定電極を備え、
前記検出部は、前記可動電極と前記第1の固定電極の間で生じる第1の前記静電容量、前記可動電極と前記第2の固定電極の間で生じる第2の前記静電容量、及び前記可動電極と前記第3の固定電極の間で生じる第3の前記静電容量を検出し、
前記補正部は、
前記第1の静電容量及び前記第3の静電容量を用いて前記第1の方向の加速度を示す第1の前記加速度信号を算出し、かつ前記第2の静電容量を用いて前記第2の方向の加速度を示す第2の前記加速度信号を算出し、
前記第2の加速度信号を算出するときの前記補正方法を、前記第1の加速度信号を算出するときの前記補正方法とは異ならせる静電容量型センサ。 - 請求項3に記載の静電容量型センサにおいて、
前記第1の固定電極及び前記第3の固定電極は前記可動電極の縁に対向しており、
前記第2の固定電極は、前記可動電極の表面又は裏面に対向している静電容量型センサ。 - 請求項1~4のいずれか一項に記載の静電容量型センサにおいて、
前記補正部は、補正テーブルを記憶しており、かつ前記補正テーブルを用いた補正式に基づいて前記加速度信号を生成する静電容量型センサ。 - 請求項5に記載の静電容量型センサにおいて、
前記補正テーブルは書き換え可能である静電容量型センサ。 - 可動電極と、
支持体と、
前記可動電極を前記支持体に移動可能な状態で取り付ける梁部材と、
前記可動電極と第1の方向から対向している第1の固定電極と、
前記可動電極と前記第1の方向とは異なる第2の方向から対向している第2の固定電極と、
前記可動電極と各前記固定電極の間で生じる静電容量の変化を検出する検出部と、
前記検出部によって検出された、加速度に対して非線形な出力を、加速度に対して線形な出力となるように補正し、補正後の出力に対応する加速度を示す加速度信号を生成する補正部と、
を備える静電容量型センサにおける非線形出力の補正方法であって、
前記可動電極と前記固定電極の間の距離及び前記梁部材のバネ定数を用いて、加速度から前記静電容量を算出する理論式を算出し、
前記理論式の逆変換式を用いて前記検出部による出力を補正する、非線形出力の補正方法。 - 請求項7に記載の非線形出力の補正方法において、前記理論式を、前記可動電極と前記固定電極の間の距離に関する設計値からのズレを用いて算出する、非線形出力の補正方法。
- 請求項7に記載の非線形出力の補正方法において、
前記静電容量型センサは、
前記可動電極を介して前記第1の方向から前記第1の固定電極と対向している第3の前記固定電極を備え、
前記静電容量型センサの前記検出部は、前記可動電極と前記第1の固定電極の間で生じる第1の前記静電容量、前記可動電極と前記第2の固定電極の間で生じる第2の前記静電容量、及び前記可動電極と前記第3の固定電極の間で生じる第3の前記静電容量を検出し、
前記静電容量型センサの前記補正部は、前記第1の静電容量及び前記第3の静電容量を用いて前記第1の方向の加速度を示す第1の前記加速度信号を算出し、かつ前記第2の静電容量を用いて前記第2の方向の加速度を示す第2の前記加速度信号を算出し、
第1の前記加速度信号と第2の前記加速度信号とについて、互いに異なる前記理論式を算出し、
第1の前記加速度信号と第2の前記加速度信号とを、それぞれについて算出した前記理論式の逆変換式を用いて補正する、非線形出力の補正方法。 - 請求項9に記載の非線形出力の補正方法において、
前記可動電極と前記第1の固定電極との間の距離の設計値と、前記可動電極と前記第3の固定電極との間の距離の設計値とは、等しい値であり、
前記理論式を、前記静電容量型センサの製造時に生じた前記可動電極と前記第1及び第3の固定電極との間の距離の設計値からのズレを用いて算出する、非線形出力の補正方法。 - 請求項7~10のいずれか一項に記載の非線形出力の補正方法において、
前記静電容量型センサに加速度を加えて前記静電容量型センサの出力を実測し、実測した前記静電容量型センサの出力と前記静電容量型センサに加えた加速度とに基づいて前記理論式の係数を定め、係数を定めた後の理論式の逆変換式を用いて補正する、非線形出力の補正方法。 - 請求項11に記載の非線形出力の補正方法において、
前記理論式の係数を定めるために前記第1の方向について前記静電容量型センサに加える加速度の範囲と、前記第2の方向について前記静電容量型センサに加える加速度の範囲とは、互いに異なる、非線形出力の補正方法。 - 請求項12に記載の非線形出力の補正方法において、
第1の前記加速度信号の補正に用いる前記理論式の係数を定めるために前記静電容量型センサに加える加速度の範囲は、負の値と正の値の双方を含む、非線形出力の補正方法。 - 請求項12又は13に記載の非線形出力の補正方法において、
第2の前記加速度信号の補正に用いる前記理論式の係数を定めるために前記静電容量型センサに加える加速度の範囲は、負の値と正の値のいずか一方のみを含む、非線形出力の補正方法。 - 請求項11~14のいずれか一項に記載の非線形出力の補正方法において、
前記理論式の係数を定めるために重力加速度を利用して前記静電容量型センサに対して加速度を加える、非線形出力の補正方法。 - 請求項15に記載の非線形出力の補正方法において、
前記第1の方向について前記静電容量型センサに対して加える加速度の範囲は、-1G以上+1G以下である、非線形出力の補正方法。 - 請求項15又は16に記載の非線形出力の補正方法において、
前記第2の方向について前記静電容量型センサに対して加える加速度の範囲は、-2G以上0G以下である、非線形出力の補正方法。 - 請求項15~17のいずれか一項に記載の非線形出力の補正方法において、
前記静電容量型センサの出力の補正を行う場所における重力加速度を測定し、測定された重力加速度の大きさを基準とする、非線形出力の補正方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015510094A JP6020711B2 (ja) | 2013-04-02 | 2014-04-01 | 静電容量型センサ、及び非線形出力の補正方法 |
| EP14779780.7A EP2982991A4 (en) | 2013-04-02 | 2014-04-01 | CAPACITIVE SENSOR AND CORRECTION FOR A NONLINEAR OUTPUT |
| CN201480002694.0A CN104781678B (zh) | 2013-04-02 | 2014-04-01 | 静电容量型传感器以及非线性输出的校正方法 |
| US14/682,058 US20150212187A1 (en) | 2013-04-02 | 2015-04-08 | Electrostatic capacitance sensor and method for correcting non-linear output |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013-077145 | 2013-04-02 | ||
| JP2013077145 | 2013-04-02 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US14/682,058 Continuation US20150212187A1 (en) | 2013-04-02 | 2015-04-08 | Electrostatic capacitance sensor and method for correcting non-linear output |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2014163076A1 true WO2014163076A1 (ja) | 2014-10-09 |
Family
ID=51658371
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2014/059634 WO2014163076A1 (ja) | 2013-04-02 | 2014-04-01 | 静電容量型センサ、及び非線形出力の補正方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20150212187A1 (ja) |
| EP (1) | EP2982991A4 (ja) |
| JP (1) | JP6020711B2 (ja) |
| CN (1) | CN104781678B (ja) |
| WO (1) | WO2014163076A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105731359A (zh) * | 2014-12-26 | 2016-07-06 | 株式会社东芝 | 传感器及其制造方法 |
| JP2018115891A (ja) * | 2017-01-17 | 2018-07-26 | パナソニックIpマネジメント株式会社 | 加速度センサ |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6661937B2 (ja) * | 2015-09-28 | 2020-03-11 | 富士電機株式会社 | 加速度補正データ算出装置及び加速度センサの製造方法 |
| CN106324282A (zh) * | 2016-08-16 | 2017-01-11 | 中国科学院声学研究所 | 一种加速度计系统,加速度计探头及其制备方法 |
| JP6816603B2 (ja) * | 2017-03-27 | 2021-01-20 | セイコーエプソン株式会社 | 物理量センサー、電子機器、および移動体 |
| CN107505479B (zh) * | 2017-09-26 | 2019-08-30 | 华中科技大学 | 一种静电加速度计 |
| CN109489649A (zh) * | 2018-12-27 | 2019-03-19 | 瑞声声学科技(深圳)有限公司 | Mems陀螺仪及包含该陀螺仪的电子设备 |
| WO2020133096A1 (zh) * | 2018-12-27 | 2020-07-02 | 瑞声声学科技(深圳)有限公司 | Mems陀螺仪及包含该陀螺仪的电子设备 |
| CN111638386A (zh) * | 2020-05-25 | 2020-09-08 | 中国电子科技集团公司第二十六研究所 | 一种基于重力场的加速度计标度因数非线性度测试方法 |
| CN113203939B (zh) * | 2021-04-26 | 2022-03-18 | 中国科学院地质与地球物理研究所 | 一种mems加速度传感器芯片的检测方法及装置 |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02110383A (ja) | 1988-10-20 | 1990-04-23 | Hitachi Ltd | 加速度検出方法及び装置 |
| JPH0572225A (ja) | 1991-09-12 | 1993-03-23 | Hitachi Ltd | 物理量検出センサ,加速度センサ及びこれらセンサの出力信号特性の調整方法と装置 |
| JPH05340958A (ja) | 1990-06-18 | 1993-12-24 | Hitachi Ltd | 加速度センサ |
| JPH07120498A (ja) | 1993-10-25 | 1995-05-12 | Hitachi Ltd | 静電容量式加速度センサの特性調整方法 |
| JPH08313552A (ja) | 1995-05-17 | 1996-11-29 | Sumitomo Precision Prod Co Ltd | 静電容量型加速度センサの非線形性の補正方法 |
| JPH0954114A (ja) * | 1995-08-15 | 1997-02-25 | Murata Mfg Co Ltd | 加速度センサ |
| WO2001096815A1 (fr) * | 2000-06-14 | 2001-12-20 | Omron Corporation | Dispositif de transformation de la sortie d'un capteur |
| JP2002022760A (ja) * | 2000-07-12 | 2002-01-23 | Takata Corp | 加速度計、加速度異常検出装置、ボルト、エアバッグ装置及びシートベルト巻取り装置 |
| JP2003248017A (ja) * | 2001-12-20 | 2003-09-05 | Toyoda Mach Works Ltd | センサ回路 |
| JP2007198789A (ja) * | 2006-01-24 | 2007-08-09 | Sharp Corp | 加速度センサの試験装置および試験方法 |
| JP2009020094A (ja) * | 2007-07-10 | 2009-01-29 | Freescale Semiconductor Inc | センサユニット |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7088492B2 (en) * | 2001-10-11 | 2006-08-08 | Denso Corporation | Micro movable mechanism system and control method for the same |
| US7055387B2 (en) * | 2003-07-25 | 2006-06-06 | The Charles Stark Draper Laboratory, Inc. | Apparatus for and method of sensing a measured input |
| CN1332205C (zh) * | 2004-07-19 | 2007-08-15 | 西北工业大学 | 单质量平板三轴微机械加速度计 |
| CN100483136C (zh) * | 2006-05-23 | 2009-04-29 | 北京航空航天大学 | 一种双轴电容式微机械加速度计 |
| CN101386400B (zh) * | 2007-09-13 | 2010-12-22 | 李刚 | 电容式单质量块三轴加速度传感器及制备方法 |
| US7630850B2 (en) * | 2007-10-15 | 2009-12-08 | Advanced Micro Devices, Inc. | Integrated circuit tester information processing system for nonlinear mobility model for strained device |
| CA2743996A1 (en) * | 2008-11-21 | 2010-05-27 | Makoto Takahashi | Capacitive dynamic quantity sensor element and dynamic quantity sensor |
| US9201091B2 (en) * | 2009-04-14 | 2015-12-01 | Atlantic Inertial Systems Limited | Accelerometer control systems |
| JP5427199B2 (ja) * | 2011-03-17 | 2014-02-26 | 日立オートモティブシステムズ株式会社 | 半導体物理量検出センサ |
| JP5799929B2 (ja) * | 2012-10-02 | 2015-10-28 | 株式会社村田製作所 | 加速度センサ |
-
2014
- 2014-04-01 CN CN201480002694.0A patent/CN104781678B/zh not_active Expired - Fee Related
- 2014-04-01 EP EP14779780.7A patent/EP2982991A4/en not_active Withdrawn
- 2014-04-01 WO PCT/JP2014/059634 patent/WO2014163076A1/ja active Application Filing
- 2014-04-01 JP JP2015510094A patent/JP6020711B2/ja active Active
-
2015
- 2015-04-08 US US14/682,058 patent/US20150212187A1/en not_active Abandoned
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02110383A (ja) | 1988-10-20 | 1990-04-23 | Hitachi Ltd | 加速度検出方法及び装置 |
| JPH05340958A (ja) | 1990-06-18 | 1993-12-24 | Hitachi Ltd | 加速度センサ |
| JPH0572225A (ja) | 1991-09-12 | 1993-03-23 | Hitachi Ltd | 物理量検出センサ,加速度センサ及びこれらセンサの出力信号特性の調整方法と装置 |
| JPH07120498A (ja) | 1993-10-25 | 1995-05-12 | Hitachi Ltd | 静電容量式加速度センサの特性調整方法 |
| JPH08313552A (ja) | 1995-05-17 | 1996-11-29 | Sumitomo Precision Prod Co Ltd | 静電容量型加速度センサの非線形性の補正方法 |
| JPH0954114A (ja) * | 1995-08-15 | 1997-02-25 | Murata Mfg Co Ltd | 加速度センサ |
| WO2001096815A1 (fr) * | 2000-06-14 | 2001-12-20 | Omron Corporation | Dispositif de transformation de la sortie d'un capteur |
| JP2002022760A (ja) * | 2000-07-12 | 2002-01-23 | Takata Corp | 加速度計、加速度異常検出装置、ボルト、エアバッグ装置及びシートベルト巻取り装置 |
| JP2003248017A (ja) * | 2001-12-20 | 2003-09-05 | Toyoda Mach Works Ltd | センサ回路 |
| JP2007198789A (ja) * | 2006-01-24 | 2007-08-09 | Sharp Corp | 加速度センサの試験装置および試験方法 |
| JP2009020094A (ja) * | 2007-07-10 | 2009-01-29 | Freescale Semiconductor Inc | センサユニット |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2982991A4 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105731359A (zh) * | 2014-12-26 | 2016-07-06 | 株式会社东芝 | 传感器及其制造方法 |
| US9921238B2 (en) | 2014-12-26 | 2018-03-20 | Kabushiki Kaisha Toshiba | Sensor and its manufacturing method |
| JP2018115891A (ja) * | 2017-01-17 | 2018-07-26 | パナソニックIpマネジメント株式会社 | 加速度センサ |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2982991A1 (en) | 2016-02-10 |
| EP2982991A4 (en) | 2016-04-06 |
| CN104781678A (zh) | 2015-07-15 |
| JP6020711B2 (ja) | 2016-11-02 |
| JPWO2014163076A1 (ja) | 2017-02-16 |
| CN104781678B (zh) | 2017-05-24 |
| US20150212187A1 (en) | 2015-07-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6020711B2 (ja) | 静電容量型センサ、及び非線形出力の補正方法 | |
| US8862420B2 (en) | Multi-axis tilt sensor for correcting gravitational effects on the measurement of pressure by a capacitance diaphragm gauge | |
| US8836348B2 (en) | Electrostatic capacitance type physical quantity sensor and angular velocity sensor | |
| US10024881B2 (en) | MEMS sensor | |
| US20130057301A1 (en) | Linear capacitance-to-voltage converter using a single amplifier for accelerometer front ends with cancellation of spurious forces contributed by sensor circuitry | |
| CN109983345B (zh) | 信号处理设备、惯性传感器、加速度测量方法、电子设备和程序 | |
| US9395386B2 (en) | Electronic tilt compensation for diaphragm based pressure sensors | |
| CN108008152B (zh) | 获取mems加速度计的寄生失配电容的方法及装置 | |
| CN106403922A (zh) | 具有电性补偿的微机电元件及其读取电路 | |
| IT202000003868A1 (it) | Inclinometro mems avente ridotto errore di rettificazione di vibrazioni | |
| EP2972066B1 (en) | Linear capacitive displacement sensor | |
| CN106556718A (zh) | 加速度校正数据计算装置以及加速度传感器的制造方法 | |
| JP5248182B2 (ja) | 力検出装置 | |
| JP6323137B2 (ja) | 感度検査装置及び感度検査方法 | |
| JP2020153901A (ja) | 温度補正装置、センサーモジュール及び温度補正方法 | |
| JP2015010856A (ja) | 加速度センサ | |
| JP7269697B1 (ja) | 圧電型電圧出力加速度センサ | |
| JP2015017819A (ja) | 加速度センサ | |
| JP7394352B2 (ja) | 信号処理装置、慣性力センサ、信号処理方法、及びプログラム | |
| JP2010025840A (ja) | 力検出装置 | |
| JP3036675B2 (ja) | 静電容量型加速度センサの非線形性の補正方法 | |
| JP3020829B2 (ja) | 多次元方向に関する力・加速度・磁気の検出装置 | |
| Malvern et al. | High performance MEMS accelerometer (Gemini accelerometer) | |
| CN111886485A (zh) | 压力传感器 | |
| JPH11194139A (ja) | 静電容量型加速度センサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 14779780 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2015510094 Country of ref document: JP Kind code of ref document: A |
|
| REEP | Request for entry into the european phase |
Ref document number: 2014779780 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2014779780 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |