WO2014142210A1 - 車両の制御装置、及びそれを備える自動二輪車 - Google Patents
車両の制御装置、及びそれを備える自動二輪車 Download PDFInfo
- Publication number
- WO2014142210A1 WO2014142210A1 PCT/JP2014/056583 JP2014056583W WO2014142210A1 WO 2014142210 A1 WO2014142210 A1 WO 2014142210A1 JP 2014056583 W JP2014056583 W JP 2014056583W WO 2014142210 A1 WO2014142210 A1 WO 2014142210A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- target
- engine
- rotation speed
- speed
- engine rotation
- Prior art date
Links
- 230000005540 biological transmission Effects 0.000 claims abstract description 21
- 230000001133 acceleration Effects 0.000 claims description 43
- 230000008859 change Effects 0.000 claims description 39
- 230000007423 decrease Effects 0.000 claims description 8
- 238000012937 correction Methods 0.000 description 77
- 239000000446 fuel Substances 0.000 description 36
- 238000012545 processing Methods 0.000 description 19
- 238000000034 method Methods 0.000 description 17
- 230000008569 process Effects 0.000 description 17
- 230000009467 reduction Effects 0.000 description 12
- 230000004044 response Effects 0.000 description 11
- 238000010586 diagram Methods 0.000 description 9
- 230000004043 responsiveness Effects 0.000 description 9
- 230000007246 mechanism Effects 0.000 description 7
- 238000012546 transfer Methods 0.000 description 2
- 101150045411 ATG8 gene Proteins 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
- B60W10/101—Infinitely variable gearings
- B60W10/107—Infinitely variable gearings with endless flexible members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/188—Controlling power parameters of the driveline, e.g. determining the required power
- B60W30/1882—Controlling power parameters of the driveline, e.g. determining the required power characterised by the working point of the engine, e.g. by using engine output chart
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/19—Improvement of gear change, e.g. by synchronisation or smoothing gear shift
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D11/00—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated
- F02D11/06—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance
- F02D11/10—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance of the electric type
- F02D11/105—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance of the electric type characterised by the function converting demand to actuation, e.g. a map indicating relations between an accelerator pedal position and throttle valve opening or target engine torque
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/0205—Circuit arrangements for generating control signals using an auxiliary engine speed control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/021—Introducing corrections for particular conditions exterior to the engine
- F02D41/0215—Introducing corrections for particular conditions exterior to the engine in relation with elements of the transmission
- F02D41/0225—Introducing corrections for particular conditions exterior to the engine in relation with elements of the transmission in relation with the gear ratio or shift lever position
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/66—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings
- F16H61/662—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings with endless flexible members
- F16H61/66254—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings with endless flexible members controlling of shifting being influenced by a signal derived from the engine and the main coupling
- F16H61/66259—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings with endless flexible members controlling of shifting being influenced by a signal derived from the engine and the main coupling using electrical or electronical sensing or control means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/30—Driving style
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0605—Throttle position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0644—Engine speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/10—Change speed gearings
- B60W2710/1005—Transmission ratio engaged
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/10—Road Vehicles
- B60Y2200/12—Motorcycles, Trikes; Quads; Scooters
- B60Y2200/126—Scooters
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2400/00—Control systems adapted for specific engine types; Special features of engine control systems not otherwise provided for; Power supply, connectors or cabling for engine control systems
- F02D2400/12—Engine control specially adapted for a transmission comprising a torque converter or for continuously variable transmissions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/66—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings
- F16H2061/6604—Special control features generally applicable to continuously variable gearings
- F16H2061/6611—Control to achieve a particular driver perception, e.g. for generating a shift shock sensation
Definitions
- the present invention relates to a vehicle control device that electronically controls both the opening of a throttle valve that adjusts the amount of air supplied to an engine and the transmission of a continuously variable transmission.
- a vehicle control device that electronically controls a gear ratio of a continuously variable transmission and an opening of a throttle valve (hereinafter, throttle opening) using an actuator (for example, Japanese Patent No. 3754188).
- throttle opening a throttle valve
- the required driving force is calculated based on the amount of accelerator operation (accelerator operation amount) by the driver and the vehicle speed.
- the target engine speed and the throttle opening are calculated so that this required driving force can be obtained.
- the engine speed has a greater influence on the feeling of riding than in a four-wheeled vehicle, so there is a strong demand to set the engine speed to a speed that provides a comfortable riding feeling.
- the required driving force is calculated, and then the target engine speed is calculated so that the required driving force can be obtained.
- the target engine speed is affected by the required driving force, it may be difficult to control the engine speed so as to obtain a comfortable ride feeling.
- One of the objects of the present invention is a vehicle control device that electronically controls the transmission gear ratio and throttle opening of a continuously variable transmission, and can provide a comfortable ride feeling and is adapted to the driving intention of the driver. It is an object of the present invention to provide a control device capable of realizing a rotational speed and a motorcycle including the same.
- the control device electronically controls the gear ratio of the continuously variable transmission and the throttle opening using an actuator.
- the control device previously stores first basic information that defines an engine rotational speed in the first operation mode of the vehicle and second basic information that defines an engine rotational speed in the second operation mode of the vehicle.
- a stored storage device a first basic engine rotational speed calculation unit that calculates an engine rotational speed obtained from the first basic information as a first engine rotational speed; and an engine obtained from the second basic information.
- a second basic engine rotation speed calculation unit that calculates a rotation speed as a second engine rotation speed; a driving intention acquisition unit that acquires a driving intention value that is a numerical value representing the driving intention of the driver; and the first engine.
- a target engine speed calculation for calculating a target engine speed based on the engine speed calculated between the rotation speed and the second engine speed and corresponding to the driving intention value.
- a target speed ratio calculation unit that calculates the target speed ratio of the continuously variable transmission based on the target engine speed, the accelerator operation amount detected by the sensor, and the target engine speed
- a target driving force calculation unit that calculates a target value related to the driving force of the vehicle, and a target throttle opening degree is calculated based on the target value and the target engine speed so as to obtain a driving force corresponding to the target value.
- a target throttle opening degree calculation unit A motorcycle according to the present invention includes the control device.
- the target engine rotation speed is first calculated, and then the target value related to the driving force is calculated. Therefore, it is possible to suppress the target value relating to the driving force of the vehicle from affecting the setting of the target engine speed. As a result, it becomes easy to control the engine speed so that a comfortable riding feeling can be obtained.
- the driving intention value is used to calculate the target engine rotation speed, an engine rotation speed suitable for the driver's driving intention can be realized.
- the engine rotation speed defined by the second basic information is a rotation speed that can realize better acceleration response than the engine rotation speed defined by the first basic information.
- the target engine rotational speed is set to a rotational speed close to the second engine rotational speed obtained from the second basic information.
- the target engine rotation speed may be the same as the engine rotation speed corresponding to the driving intention value, or may be the engine rotation speed obtained by correcting the engine rotation speed corresponding to the driving intention value.
- the target value related to the driving force of the vehicle is, for example, a target value for driving wheel torque or driving wheel output. Further, the target value related to the driving force of the vehicle may be a target value for engine torque, a target value for engine output, a target value for vehicle acceleration, etc. (the product of vehicle acceleration and vehicle weight is the vehicle drive Power).
- the driving intention acquisition unit may calculate the driving intention value based on a driving state of the vehicle. According to this, the driving intention value can be acquired without being operated by the driver.
- the target engine rotation speed unit may correct the engine rotation speed according to the driving intention value, and calculate the corrected engine rotation speed as the target engine rotation speed. According to this, traveling with good fuel consumption can be realized, for example, by reducing the target engine speed by correction.
- the first basic information associates the accelerator operation amount with the engine rotation speed in the first operation mode
- the second basic information associates the accelerator operation amount with the engine rotation speed in the second operation mode.
- the first basic engine rotation speed calculation unit may calculate the first engine rotation speed based on an accelerator operation amount detected by the sensor with reference to the first basic information
- the second basic engine rotation speed calculation unit may calculate the second engine rotation speed from the accelerator operation amount detected by the sensor with reference to the second basic information.
- the driving intention acquisition unit may limit a change in the driving intention value when the vehicle is in a predetermined traveling state.
- the predetermined traveling state is a traveling state estimated that the acceleration request by the driver is increased
- the driving intention acquisition unit is configured to perform the driving in the traveling state estimated that the acceleration request by the driver is increased.
- the change in the driving intention value may be limited so that the change in the direction in which the engine rotation speed decreases according to the intention value is suppressed. According to this, it is possible to suppress a decrease in acceleration responsiveness due to a change in the driving intention value in a driving situation in which the acceleration request is estimated to increase.
- the predetermined traveling situation is, for example, a case where the vehicle is traveling on a curve, a case where a brake device is operating, or a case where the vehicle is traveling on an uphill.
- 1 is a side view of a motorcycle including a control device according to an embodiment of the present invention.
- 1 is a block diagram showing a configuration of a motorcycle. It is a block diagram which shows the process of a control apparatus. It is a block diagram which shows the process of a reference
- (A) is an example of a first engine speed map (first basic information), and (b) is an example of a second engine speed map (second basic information).
- A is an example of a first engine speed map (first basic information)
- (b) is an example of a second engine speed map (second basic information).
- A is an example of a first engine speed map (first basic information)
- (b) is an example of a second engine speed map (second basic information).
- FIG. 1 is a side view of a motorcycle 1 including a control device 10 according to an embodiment of the present invention.
- FIG. 2 is a block diagram showing the configuration of the motorcycle 1.
- the motorcycle 1 has a front wheel 2 and a rear wheel 8.
- the front wheel 2 is provided with a front wheel rotational speed sensor 28 (see FIG. 2) that outputs a signal corresponding to the rotational speed of the front wheel 2, and the rear wheel 8 is a rear wheel that outputs a signal corresponding to the rotational speed of the rear wheel 8.
- a rotation speed sensor 27 (see FIG. 2) is provided.
- the control device 10 calculates the vehicle speed based on the output of the front wheel rotational speed sensor 28 or the rear wheel rotational speed sensor 27.
- the motorcycle 1 has a steering 3 for steering the front wheel 2.
- Grips 3 a are provided on the left and right of the steering 3.
- One grip 3a functions as an accelerator grip, and an accelerator sensor 24 (see FIG.
- the front wheel 2 and the rear wheel 8 are provided with a brake device for braking them, and the steering 3 is provided with a brake lever 3b for operating the brake device.
- the brake lever 3b is provided with a brake switch 29 (see FIG. 2) for detecting the operation.
- the motorcycle 1 has a continuously variable transmission (hereinafter referred to as CVT) 5, a clutch 6, a final reduction mechanism 7, and a torque transmission path from the engine 4 to the rear wheel 8 that is a driving wheel.
- CVT continuously variable transmission
- the clutch 6 is disposed downstream of the CVT 5.
- a final reduction mechanism 7 is disposed between the clutch 6 and the rear wheel 8.
- the clutch 6 is an automatic clutch such as a centrifugal clutch.
- the engine 4 has a cylinder, a piston disposed in the cylinder, a crankshaft connected to the piston, and the like.
- the motorcycle 1 has an engine rotation speed sensor 21 for detecting the engine rotation speed.
- the engine 4 also has a throttle valve that controls the amount of air supplied to the engine 4 and an injector that supplies fuel to the engine 4 in an intake passage connected to the combustion chamber.
- the motorcycle 1 has a throttle opening sensor 22 for detecting the opening of the throttle valve (hereinafter referred to as throttle opening) and a throttle actuator 23 for controlling the throttle valve.
- the CVT 5 is stretched over an input shaft interlocked with the crankshaft, a driving pulley disposed on the input shaft, an output shaft, a driven pulley disposed on the output shaft, a driving pulley and a driven pulley. And a belt for transmitting the rotation (torque) of the driving pulley to the driven pulley.
- the motorcycle 1 has a CVT actuator 25 for controlling the transmission ratio of the CVT 5.
- the CVT actuator 25 controls one of the two sheaves constituting the drive pulley to control the gear ratio.
- the CVT actuator 25 may control the gear ratio by moving one of the two sheaves constituting the driven pulley.
- the CVT 5 is provided with an output shaft rotational speed sensor 26 for detecting the rotational speed of the output shaft of the CVT 5.
- the control device 10 includes a storage device 10c and a microprocessor that executes a program stored in the storage device 10c.
- a map used for controlling the engine 4 and the CVT 5 is stored in the storage device 10c.
- the control device 10 may include a microprocessor mainly responsible for controlling the engine 4 and a microprocessor mainly responsible for controlling the CVT 5.
- the two microprocessors communicate according to a predetermined protocol, and transmit / receive information calculated by each other.
- Output signals from the sensors 21, 22, 24, 26, 27, 28, and 29 are input to the control device 10.
- the control device 10 moves the actuators 23 and 25 based on the output signals of the sensors 21, 22, 24, 26, 27, 28 and 29 to control the CVT 5 and the engine 4.
- the control device 10 controls the transmission ratio of the CVT 5 through the CVT actuator 25 and controls the throttle opening degree through the throttle actuator 23.
- FIG. 3 is a block diagram illustrating processing executed by the control device 10.
- the control device 10 includes a target engine speed calculation unit 12, a target gear ratio calculation unit 13, a reference throttle opening calculation unit 14, a target driving force calculation unit 15, and a target throttle opening.
- a calculation unit 16 and a driving intention acquisition unit 17 are included.
- the processing of the control unit 10 executed at each part is executed at a predetermined cycle while the vehicle is traveling, and the target gear ratio and the target throttle opening of the CVT 5 are updated at that cycle.
- the target engine speed calculation unit 12 calculates the target engine speed based on the accelerator operation amount detected by the accelerator sensor 24.
- the target engine rotation speed calculation unit 12 in the example described here calculates the reference target engine rotation speed based on the accelerator operation amount detected by the accelerator sensor 24 first. Thereafter, the target engine rotation speed calculation unit 12 sets the corrected engine rotation speed as the target engine rotation speed when performing correction processing for the reference target engine rotation speed, and does not perform correction processing for the reference target engine rotation speed. Uses the reference target engine speed as the target engine speed.
- the engine rotation speed calculated by the target engine rotation speed calculation unit 12 (that is, the corrected engine rotation speed and the reference target engine rotation speed when correction processing is not performed) is referred to as a final target engine rotation speed.
- the target engine rotation speed calculation unit 12 corrects the reference target engine rotation speed so that the fuel consumption is better than driving the engine at the reference target engine rotation speed, and uses the corrected engine rotation speed as the final target engine rotation speed.
- the target speed ratio calculation unit 13 calculates a target speed ratio that is a target value for the speed ratio of the CVT 5 based on the final target engine speed so that the actual engine speed becomes the final target engine speed.
- Control device 10 drives CVT actuator 25 so that the actual gear ratio of CVT 5 becomes the target gear ratio.
- the target driving force calculation unit 15 calculates a target value related to the driving force of the vehicle based on the accelerator operation amount detected by the accelerator sensor 24 and the above-described reference target engine rotation speed.
- the target value relating to the driving force of the vehicle is, for example, a target value for the torque of the rear wheel 8 or the output of the rear wheel 8.
- the target value related to the driving force of the vehicle may be a target value for engine torque, a target value for engine output, or the like.
- the target value regarding a driving force is called a target driving force.
- the target throttle opening calculation unit 16 calculates the target throttle opening based on the target driving force and the final target engine rotation speed so that the target driving force can be obtained while driving the engine at the final target engine rotation speed.
- the control device 10 drives the throttle actuator 23 so that the actual throttle opening becomes the target throttle opening.
- the target engine rotation speed is calculated first, and then the target driving force is calculated. Therefore, it is possible to suppress the target driving force of the vehicle from affecting the setting of the target engine speed. As a result, it becomes easy to control the engine speed so as to realize a comfortable riding feeling.
- the target driving force is calculated based on the accelerator operation amount and the reference target engine rotation speed.
- the target throttle opening is calculated based on the final target engine speed obtained from the reference target engine speed and the target driving force. Therefore, for example, the driving force of the vehicle can be adjusted and controlled while maintaining the rotational speed of the engine 4 at the final target engine rotational speed.
- the same driving force as that obtained when the engine 4 is driven at the reference target engine rotational speed and the throttle opening corresponding to the accelerator operation amount while maintaining the rotational speed of the engine 4 at the final target engine rotational speed. can be obtained.
- the engine 4 can be driven so that the corrected target driving force can be obtained while maintaining the rotational speed of the engine 4 at the final target engine rotational speed. It becomes.
- the target engine rotation speed calculation unit 12 includes a reference target engine rotation speed calculation unit 12A.
- the reference target engine rotation speed calculation unit 12A calculates a reference target engine rotation speed based on the accelerator operation amount detected by the sensor and a numerical value indicating driving intention (hereinafter referred to as driving intention value). Specifically, the following processing is performed.
- the storage device 10c includes first basic information (for example, a map) that defines the engine rotation speed in the first operation mode and second basic information that defines the engine rotation speed in the second operation mode. Stored in advance. These operation modes include an operation mode with good acceleration response (acceleration response mode), an operation mode with good fuel consumption (low fuel consumption mode), a normal operation mode, and the like.
- the reference target rotation speed calculation unit 12A calculates the engine rotation speed from each of the two pieces of basic information based on the accelerator operation amount detected by the sensor. Then, the reference target rotation speed calculation unit 12A calculates a reference target engine rotation speed based on a driving intention value between two engine rotation speeds calculated from two pieces of basic information.
- the driving intention value is a numerical value representing the driver's request for the driving mode of the vehicle.
- the driving intention value is a numerical value representing the driver's request level for the acceleration responsiveness mode and the driver's request level for the low fuel consumption mode.
- the driving intention value is calculated based on at least one of the current driving state and the past driving state, for example. For example, when the change speed of the accelerator operation amount is large or when the frequency of change of the accelerator operation amount is high, it is estimated that the driver desires traveling with good acceleration response. In general, the acceleration responsiveness improves as the engine speed increases, and the fuel efficiency improves as the engine speed decreases. Therefore, when the driving intention value indicates that the driver strongly demands traveling with good acceleration responsiveness, the control device 10 sets the reference target engine rotation speed higher.
- FIG. 4 is a block diagram showing processing executed by the reference target engine rotation speed calculation unit 12A.
- the reference target engine rotation speed calculation unit 12A includes a first basic engine rotation speed calculation unit 12a, a second basic engine rotation speed calculation unit 12b, and a calculation unit 12c.
- the storage device 10c stores the first basic information relating the engine rotation speed and the accelerator operation amount, and the second basic information relating the engine rotation speed and the accelerator operation amount.
- the first basic engine rotation speed calculation unit 12a and the second basic engine rotation speed calculation unit 12b use the first basic information and the second basic information, respectively, to rotate the engine according to the accelerator operation amount detected by the sensor. Calculate the speed.
- the engine rotation speed obtained from the first basic information is referred to as a first basic engine rotation speed
- the engine rotation speed obtained from the second basic information is referred to as a second basic engine rotation speed.
- the computing unit 12c calculates a reference target engine rotational speed based on the first basic engine rotational speed, the second basic engine rotational speed, and the driving intention value. More specifically, the calculation unit 12c calculates an engine rotation speed calculated between the first basic engine rotation speed and the second basic engine rotation speed and corresponding to the driving intention value as a reference target engine rotation speed. .
- the engine speed defined by the first basic information and the engine speed defined by the second basic information are different from each other.
- the engine rotation speed defined by the second basic information is a rotation speed that can realize better acceleration response than the engine rotation speed defined by the first basic information.
- the engine rotation speed defined by the first basic information is a rotation speed that can realize lower fuel consumption than the engine rotation speed defined by the second basic information.
- the second basic information defines the engine rotational speed in the acceleration responsiveness mode
- the first basic information defines the engine rotational speed in the low fuel consumption mode.
- the acceleration responsiveness improves as the engine speed increases, and the fuel efficiency improves as the engine speed decreases. Therefore, the engine speed defined by the second basic information is higher than the engine speed defined by the first basic information.
- Each of the two basic information is, for example, a map that relates information on the vehicle speed to the engine rotation speed and the accelerator operation amount.
- the storage device 10c has the first engine rotation speed map as the first basic information and the second engine rotation speed map as the second basic information will be described as an example.
- the vehicle speed information is, for example, the vehicle speed itself calculated from the rotational speed of the front wheels 2 and the rotational speed of the rear wheels 8.
- information on the vehicle speed is obtained in the torque transmission path such as the rotational speed of the rear wheels 8, the rotational speed of the output shaft of the CVT 5, the rotational speed of the members constituting the final reduction mechanism 7, and the rotational speed of the members constituting the clutch 6.
- the rotational speed of the member after the output shaft of CVT5 may be sufficient. That is, the information regarding the vehicle speed is information that can be converted into the vehicle speed by multiplying by a coefficient or a reduction ratio.
- the rotational speed of the output shaft of the CVT 5 can be converted to a vehicle speed when the clutch 6 is engaged.
- the first and second engine rotation speed maps in which the vehicle speed, the accelerator operation amount, and the engine rotation speed are associated is used as the first and second basic information will be described as an example.
- FIG. 5 is a diagram showing an example of an engine speed map that is basic information.
- A of the same figure is an example of a 1st engine speed map
- (b) is an example of a 2nd engine speed map.
- the horizontal axis represents the vehicle speed
- the vertical axis represents the engine rotation speed.
- a plurality of lines showing the relationship between the engine rotation speed and the vehicle speed are illustrated. These lines indicate the relationship between the engine speed and the vehicle speed at the accelerator operation amounts Ac1, Ac2, and Ac3.
- the line Low in the figure shows the relationship between the vehicle speed and the engine speed when the gear ratio is set to low
- the line High shows the vehicle speed and engine speed when the gear ratio is set to high (top). Shows the relationship.
- the engine speed defined by the second engine speed map is higher than the engine speed defined by the first engine speed map.
- the engine rotation speed Ne2 defined by the second engine rotation speed map is higher than the engine rotation speed Ne1 defined by the first engine rotation speed map. That is, when the engine rotation speeds of the two maps are compared with the same accelerator operation amount and the same vehicle speed, the engine rotation speed of the second engine rotation speed map is higher than the engine rotation speed of the first engine rotation speed map.
- the engine rotation speed of the second engine rotation speed map does not necessarily have to be higher than the engine rotation speed of the first engine rotation speed map in the entire range of the vehicle speed.
- the engine rotation speed of the second engine rotation speed map may be higher than the engine rotation speed of the first engine rotation speed map only in the middle vehicle speed region.
- the first basic engine rotation speed calculation unit 12a refers to the first engine rotation speed map which is the first basic information, and determines the engine rotation speed corresponding to the accelerator operation amount and the vehicle speed detected by the sensor as the first basic engine rotation speed. Calculate as speed.
- the second basic engine rotational speed calculation unit 12b refers to the second engine rotational speed map that is the second basic information, and determines the engine rotational speed corresponding to the accelerator operation amount and the vehicle speed detected by the sensor as the second basic rotational speed. Calculated as basic engine speed.
- One of the two pieces of basic information may not be a map that relates the engine rotation speed, the information about the vehicle speed, and the accelerator operation amount.
- the second basic information may be a map in which the difference between the first basic engine rotation speed and the second basic engine rotation speed, the vehicle speed, and the accelerator operation amount are related.
- the second basic information may be a map in which the ratio between the first basic engine rotation speed and the second basic engine rotation speed, the vehicle speed, and the accelerator operation amount are related.
- the second basic engine rotation speed calculation unit 12b calculates a difference or ratio corresponding to the accelerator operation amount detected by the sensor and the vehicle speed, and then refers to the difference or ratio and the first engine rotation speed map.
- the second basic engine rotational speed is calculated.
- the second basic information may be a difference or a ratio between the first basic engine rotation speed and the second basic engine rotation speed that does not depend on the vehicle speed or the accelerator operation amount.
- the second basic engine rotation speed calculation unit 12b calculates the second basic engine rotation speed based on the difference or ratio and the first basic engine rotation speed calculated with reference to the first engine rotation speed map. calculate.
- the calculation unit 12c calculates an engine rotation speed according to the driving intention value calculated by the driving intention acquisition unit 17 between the first basic engine rotation speed and the second basic engine rotation speed.
- the engine rotation speed calculated in this way is the reference target engine rotation speed described above.
- the driving intention value is a numerical value representing the degree of demand of the driver with respect to the traveling mode of the vehicle. For example, when the driving intention value is a numerical value representing the degree of demand of the driver for traveling with good acceleration response, the calculation unit 12c sets the reference target engine rotation speed to the second basic engine rotation speed as the driving intention value increases. Move closer.
- the calculation unit 12c brings the reference target engine rotation speed closer to the first basic engine rotation speed as the driving intention value increases. That is, the arithmetic unit 12c brings the reference target engine speed close to one of the two basic engine speeds as the driving intention value increases.
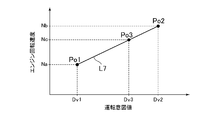
- FIG. 6 is a diagram for explaining an example of processing of the calculation unit 12c.
- the horizontal axis represents the driving intention value
- the vertical axis represents the engine rotation speed.
- a line L7 in the figure is a straight line passing through the point Po1 (operation intention value Dv1, first basic engine rotation speed Na) and the point Po2 (operation intention value Dv2, second basic engine rotation speed Nb).
- the driving intention value is Dv3 (Dv1 ⁇ Dv3 ⁇ Dv2)
- the calculation unit 12c calculates the engine rotation speed Nc at the point Po3 (driving intention value Dv3, engine rotation speed Nc) on the line L7 as the reference target engine rotation speed. (Na ⁇ Nc ⁇ Nb). That is, in the example of FIG.
- the calculation unit 12 c linearly complements the engine rotation speed with the driving intention value between the first basic engine rotation speed Na and the second basic engine rotation speed Nb, and the driving intention acquisition unit 17.
- the engine rotational speed corresponding to the driving intention value Dv3 calculated by the above is used as the reference target engine rotational speed.
- the driving intention value Dv1 is the minimum value of the driving intention value that can be calculated by the driving intention acquisition unit 17 and the driving intention value Dv2 is the maximum value of the driving intention value that can be calculated by the driving intention acquisition unit 17. That is, when the driving intention acquisition unit 17 calculates the minimum value of the driving intention value, the first basic engine rotation speed Na is calculated as the reference target engine rotation speed. On the other hand, when the driving intention acquisition unit 17 calculates the maximum value of the driving intention value, the second basic engine rotation speed Nb is calculated as the reference target engine rotation speed.
- the driving intention value may be a value lower than the driving intention value Dv1.
- the calculation unit 12c sets the first basic engine rotation speed as the reference target engine rotation speed regardless of the driving intention value, for example.
- the driving intention value may be higher than the driving intention value Dv2.
- the calculation unit 12c sets the second basic engine rotation speed as the reference target engine rotation speed regardless of the driving intention value.
- the driving intention acquisition unit 17 calculates a driving intention value based on the driving state of the vehicle detected by the sensor. For example, the driving intention acquisition unit 17 calculates the driving intention value based on at least one parameter selected from the accelerator operation amount, the vehicle speed, the accelerator operation amount change speed that is a differential value of the accelerator operation amount, and the acceleration.
- the driving intention acquisition unit 17 calculates the first load state value based on the accelerator operation amount and the vehicle speed. Further, the driving intention acquisition unit 17 calculates the second load state value based on the change speed of the accelerator operation amount. Furthermore, the driving intention acquisition unit 17 calculates the third load state value based on the vehicle speed and the acceleration of the vehicle. The driving intention acquisition unit 17 calculates the driving intention value by using all or part of these load state values.
- Each load state value is a numerical value for evaluating the possibility that the load applied to the engine 4 changes.
- the driving intention acquisition unit 17 increases as the load applied to the engine changes. Calculate the intended value.
- the driving intention acquisition unit 17 increases as the possibility that the load applied to the engine changes is low. Is calculated.
- FIG. 7A is an example of a map that associates the accelerator operation amount, the vehicle speed, and the first load state value.
- the solid line indicates the contour line of the first load state value.
- the first load state value is relatively small in an operation region (for example, a region where both the vehicle speed and the accelerator operation amount are medium) in which the possibility that the load is unlikely to change is low.
- the driving intention acquisition unit 17 refers to this map, for example, and calculates the first load state value from the accelerator operation amount and the vehicle speed detected based on the output of the sensor.
- FIG. 7B is an example of a map that associates the change speed of the accelerator operation amount with the second load state value. Also in this map, the second load state value is relatively small in the driving region in which the possibility that the load changes is small, that is, in the driving region where the change speed of the accelerator operation amount is small.
- the driving intention acquisition unit 17 calculates the change speed of the accelerator operation amount, and then calculates a second load state value corresponding to the calculated change speed of the accelerator operation amount with reference to this map.
- FIG. 7C is an example of a map that associates the vehicle speed, the acceleration of the vehicle, and the third load state value.
- the solid line shows the contour line of the third load state value.
- the third load state value is small in the driving region in which the possibility that the load will change is low, specifically, in the driving region where the vehicle speed is medium and the acceleration is small.
- the driving intention acquisition unit 17 refers to this map and calculates a third load state value corresponding to the vehicle speed and acceleration detected based on the output of the sensor.
- the driving intention acquisition unit 17 may select a load state value to be used for calculating the driving intention value from among the three load state values described above, and calculate the driving intention value based on the selected load state value. For example, the driving intention acquisition unit 17 calculates the driving intention value using all the load state values when the signs of all the load state values match. On the other hand, if there is one of the three load state values whose signs do not match, the driving intention acquisition unit 17 does not use any load state value and does not calculate the driving intention value in the current process. That is, the driving intention acquisition unit 17 does not update the driving intention value obtained in the previous process. Further, the driving intention acquisition unit 17 selects a load state value having the same sign from the first load state value, the second load state value, and the third load state value, and uses the selected load state value to drive A value may be calculated.
- the driving intention acquisition unit 17 may calculate the driving intention value based on the selected load state value and the driving intention value obtained in the previous process. For example, the driving intention acquisition unit 17 may calculate a product of the selected load state values, add the product to the driving intention value obtained in the previous process, and use the result of the addition as a new driving intention value. Further, the driving intention acquisition unit 17 may calculate the sum of the selected load state values, add the sum to the driving intention value obtained in the previous process, and use the result of the addition as a new driving intention value. Further, the driving intention acquisition unit 17 calculates the average value or median value of the selected load state values, adds the average value or median value to the driving intention value obtained in the previous process, and newly adds the result of the addition. A good driving intention value may be used.
- the driving intention acquisition unit 17 limits the change of the driving intention value when the vehicle is in a predetermined traveling state. For example, the driving intention acquisition unit 17 limits the change of the driving intention value so that a decrease in the reference target engine rotation speed can be suppressed in a driving situation where it is estimated that the acceleration request from the driver increases. That is, the driving intention acquisition unit 17 drives the driving intention value so that the change of the reference target engine rotation speed toward the first basic engine rotation speed is suppressed in a driving situation where it is estimated that the acceleration request from the driver increases. Limit changes in In other words, the driving intention value at which the first basic engine rotation speed is calculated as the reference target engine rotation speed is the first value, and the driving intention value at which the second basic engine rotation speed is calculated is the first target engine rotation speed. When the value is 2, the driving intention acquisition unit 17 limits the change from the second value of the driving intention value toward the first value.
- the driving intention acquisition unit 17 maintains the driving intention value at a value when the vehicle enters the traveling state until the vehicle leaves the above-described traveling state. In another example of the restriction, the driving intention acquisition unit 17 may change the driving intention value toward the second value until the vehicle exits the above-described predetermined traveling state.
- the change in the reference target engine speed itself is not suppressed, but the change in the driving intention value is suppressed. Therefore, although the change of the relative relationship (for example, difference) of the reference target engine rotational speed with respect to the first basic engine rotational speed and the second basic engine rotational speed is suppressed, the first basic engine speed is changed when the accelerator operation amount changes. Since the engine speed and the second basic engine speed change, the reference target engine speed itself changes.
- An example of a driving situation in which the driver's acceleration request is estimated to increase is a situation where the vehicle is turning.
- the vehicle speed is reduced, and then when the vehicle starts straight running, the driver increases the acceleration request and the vehicle speed increases. Determination of whether or not the vehicle is turning can be performed as follows.
- the car body is tilted.
- the tire contacts the ground not at the center in the width direction but at a position close to the side of the tire (hereinafter, a portion of the tire surface that contacts the ground is referred to as a ground contact point).
- the distance between the ground contact point and the axle (the rotation radius of the front wheel and the rotation radius of the rear wheel) is reduced. Since there is a difference between the tire thickness of the front wheel (tire radius of the tire) and the tire thickness of the rear wheel (radius of the tire cross section), the reduction rate of the rotation radius of the front wheel and the rear wheel There is a difference between the reduction rate of the turning radius.
- the driving intention acquisition unit 17 determines whether or not the vehicle is turning based on the difference between the vehicle speed calculated from the rotational speed of the front wheels 2 and the vehicle speed calculated from the rotational speed of the rear wheels 8. .
- the determination of whether or not the vehicle is turning is not limited to the above-described processing.
- a motorcycle may be provided with an acceleration sensor for detecting the inclination of the vehicle body in the left-right direction.
- the driving intention acquisition unit 17 determines that the vehicle is turning, for example, when the vehicle body is tilted and the vehicle speed is higher than the threshold value.
- the motorcycle 1 is provided with, for example, a switch 29 for detecting an operation of the brake lever 3b and a sensor for detecting an operating state of a brake device provided on the front wheel 2 or the rear wheel 8.
- the driving intention acquisition unit 17 determines whether or not the brake device is operating based on the outputs of the switches and sensors.
- the driving intention acquisition unit 17 calculates a traveling load based on, for example, the vehicle speed, the current engine speed, and the current throttle opening, and determines whether or not the vehicle is traveling uphill based on the traveling load. .
- the acceleration of the vehicle is a
- the weight of the vehicle is M
- the engine torque is Teg
- the inertia torque of the engine 4 is Ti
- the mechanical loss of torque in the path from the CVT 5 to the rear wheel 8 is Tloss.
- the total traveling load acting on the vehicle is Lv
- the total travel load Lv includes travel resistance (hereinafter referred to as reference travel resistance) when traveling on a horizontal road such as air resistance.
- (Teg ⁇ Ti) ⁇ speed ratio ⁇ Tloss (M ⁇ a + Lv) ⁇ k
- the engine torque Teg is calculated by referring to an engine torque map showing the relationship among the throttle opening, the engine speed, and the engine torque.
- the inertia torque Ti is a value obtained by multiplying the change speed of the engine rotation speed by the inertia moment of the mechanism (crankshaft or piston of the engine 4) upstream of the CVT 5.
- the gear ratio is, for example, the actual gear ratio of the current CVT 5 and can be calculated from the actual engine speed and the vehicle speed detected through a sensor.
- k is a coefficient obtained from the radius of the rear wheel 8 and the reduction ratio of the final reduction mechanism 7. Therefore, for example, the driving intention acquisition unit 17 calculates the engine torque Teg based on the engine speed and the throttle opening, and based on the engine torque Teg, the engine speed changing speed, and the vehicle speed, the relationship described above.
- the total travel load Lv is calculated from the equation.
- the driving intention acquisition unit 17 calculates a value obtained by subtracting the reference traveling resistance due to air resistance or the like from the total traveling load Lv as the traveling load.
- the travel load calculated in this way is generally a positive value when the vehicle is traveling uphill.
- the reference running resistance increases as the vehicle speed increases.
- the relationship between the vehicle speed and the reference running resistance is obtained in advance through experiments or the like. Therefore, the driving intention acquisition unit 17 refers to, for example, a map or a relational expression that associates the vehicle speed with the reference running resistance, and calculates the reference running resistance based on the vehicle speed.
- the processing of the driving intention acquisition unit 17 is not limited to that described above.
- the motorcycle 1 may have an operation member for accepting a driver's request for the travel mode of the vehicle.
- the motorcycle 1 may include an operation member that allows the driver to input a degree of request for travel with good acceleration response.
- the driving intention acquisition unit 17 detects the operation amount of the operation member and sets the operation amount as the driving intention value.
- FIG. 8 is a diagram for explaining the outline of the processing.
- the horizontal axis in the figure is the engine rotation speed, and the vertical axis is the engine torque.
- a torque curve representing the relationship between the engine torque and the engine rotation speed is drawn.
- FIG. 4A shows a torque curve when the throttle opening is Th1, Th2, and
- FIG. 4B shows a torque curve when the throttle opening is Th1, Th4, Th6.
- a line A is a curve (hereinafter referred to as the best fuel consumption curve) indicating an operation point at which the fuel consumption becomes the best.
- 6A and 6B indicates an operation point at which the same engine output (engine torque ⁇ engine rotation speed) as the operation point P1 (engine rotation speed N1, throttle opening Th1) can be obtained. It is an output curve.
- a line L4 in FIG. 5B is an equal output curve indicating an operation point at which the same engine output as the operation point P4 (engine speed N1, throttle opening Th4) can be obtained.
- the engine speed N1 is the reference target engine speed
- the throttle opening Th1 is a throttle opening (hereinafter referred to as a reference throttle opening) converted from the accelerator operation amount.
- control apparatus 10 of this embodiment may perform one or both of the rotational speed correction which is correction
- the target engine speed calculation unit 12 calculates the reference target engine speed N1 as described above.
- the target engine rotational speed calculation unit 12 corrects the reference target engine rotational speed N1, and sets the result of the correction as the final target engine rotational speed.
- the target engine rotation speed calculation unit 12 calculates the final target engine rotation speed based on the reference target engine rotation speed so that the fuel consumption is improved as compared with driving the engine 4 at the reference target engine rotation speed.
- the target engine speed calculation unit 12 sets an engine speed N2 between the reference target engine speed N1 and the best fuel efficiency engine speed N3 as the final target engine speed N2.
- the final target engine speed is gradually changed from the reference target engine speed N1 toward the best fuel efficiency engine speed N3.
- the target engine rotation speed calculation unit 12 may subtract a predetermined rotation speed from the reference target engine rotation speed N1 and use the subtraction result as the final target engine rotation speed.
- the target transmission ratio calculation unit 13 calculates the target transmission ratio of the CVT 5 based on the final target engine rotation speed, and the control device 10 drives the CVT actuator 25 so that the actual transmission ratio matches the target transmission ratio.
- the engine rotation speed at the operation point P1 shown in FIG. 8A is the reference target engine rotation speed N1.
- the throttle opening Th1 at the operating point P1 is a value obtained by converting the accelerator operation amount into the throttle valve angle.
- the controller 10 obtains the engine output (output indicated by the line L3) at the operation point P1 while driving the engine 4 at the final target engine rotational speed N2.
- Set the target throttle opening so that Therefore, in this case, the throttle opening Th2 at the operation point P2 is set as the target throttle opening.
- the operation point P2 is an operation point at which an engine output equal to the operation point P1 can be obtained and the engine rotation speed becomes the final target engine rotation speed N2.
- the control device 10 drives the throttle actuator 23 so that the actual throttle opening matches the target throttle opening.
- the control device 10 performs the following processing to calculate the target throttle opening.
- the target driving force calculation unit 15 calculates the driving force of the vehicle at the driving point P1 based on the reference target engine speed N1 and the accelerator operation amount (specifically, the throttle opening degree Th1 converted from the accelerator operation amount).
- the driving force is set as a reference target driving force.
- the target throttle opening calculation unit 16 sets the final target engine rotational speed N2 and the reference target driving force so that a driving force corresponding to the reference target driving force can be obtained while driving the engine 4 at the final target engine rotational speed N2. Based on this, the target throttle opening degree Th2 is calculated.
- the reference target driving force refers to the above-described target driving force (for example, the target value for the torque of the rear wheel 8 and the output of the rear wheel 8 (torque of the rear wheel 8 ⁇ rotational speed of the rear wheel 8).
- This is the target value from which the target value) is based. That is, when a correction process for a driving force described later is performed, a value obtained by correcting the reference target driving force is a target driving force. When such a correction process is not performed, the reference target driving force is corrected. Is the target driving force.
- the torque of the rear wheel 8 and the output of the rear wheel 8 are proportional to the engine output. Therefore, as shown in FIG. 8A, by setting the torque of the rear wheel 8 at the driving point P1 and the output of the rear wheel 8 as target values, the engine speed is maintained while maintaining the engine output at the driving point P1. Can be changed.
- the target engine rotational speed calculation unit 12 sets the reference target engine rotational speed N1 as the final target engine rotational speed when the rotational speed correction is not performed.
- the control device 10 obtains an engine output higher or lower than the engine output at the operation point P1 while driving the engine 4 at the final target engine rotational speed N1.
- the target throttle opening is set so that For example, as shown in FIG. 8B, the control device 10 can obtain the engine output indicated by the line L4 higher than the engine output indicated by the line L3 while driving the engine 4 at the final target engine speed N1.
- the throttle opening Th4 at the operation point P4 is set as the target throttle opening.
- the operation point P4 is an operation point on the line L4 where the engine rotation speed is N1.
- the control device 10 performs the following processing in order to calculate the target throttle opening when performing the driving force correction.
- the target driving force calculation unit 15 calculates the driving force of the vehicle at the driving point P1 based on the reference target engine speed N1 and the accelerator operation amount (specifically, the throttle opening degree Th1 converted from the accelerator operation amount).
- the driving force is set as a reference target driving force. Thereafter, the target driving force calculation unit 15 corrects the calculated reference target driving force, and uses the corrected driving force as the target driving force.
- the target throttle opening calculation unit 16 can obtain a driving force corresponding to the target driving force while driving the engine 4 at the target engine rotation speed N1 (equal to the reference target engine rotation speed when the rotation speed correction is not performed). Then, the target throttle opening degree Th4 is calculated based on the target engine speed N1 and the target driving force.
- Rotational speed correction and driving force correction are executed when predetermined conditions are satisfied. For example, in a motorcycle provided with an operation member that enables selection of these two corrections, the driver selects one or both of the two corrections through the operation member.
- the control device 10 executes correction according to the operation. Further, when it is detected that the vehicle is traveling uphill, the target driving force calculation unit 15 may perform driving force correction. Further, the target engine rotation speed calculation unit 12 may perform rotation speed correction when the steady running of the vehicle continues for a certain time or more.
- the target engine rotation speed calculation unit 12 sets the final target engine rotation speed so that the fuel consumption is better than driving the engine 4 at the reference target engine rotation speed N1, and the target throttle opening calculation unit 16
- the target throttle opening is set so that an engine output higher or lower than the engine output at the operation point P1 can be obtained while driving the engine 4 at the target engine rotation speed.
- the target engine speed calculation unit 12 calculates the best fuel efficiency engine speed N5 of the engine output indicated by the line L4 and the reference target engine speed N1.
- the final target engine speed N6 is set in between.
- the target throttle opening calculation unit 16 sets the throttle opening Th6 at the operation point P6 as the target throttle opening so that the engine output indicated by the line L4 can be obtained while driving the engine 4 at the final target engine speed N6.
- the best fuel efficiency engine speed N5 is the engine speed at the driving point P5 that is the intersection of the line L4 and the best fuel efficiency curve A.
- the operation point P6 is an operation point on the line L4 where the engine speed is N6.
- the target engine rotation speed calculation unit 12 sets the reference target engine rotation speed N1 as the final target engine rotation speed, and the target throttle opening calculation unit 16 sets the engine at the operation point P1.
- the target throttle opening is set so that output can be obtained. Therefore, in this case, the throttle opening Th1 is set to the target throttle opening at the operation point P1.
- the target engine rotation speed calculation unit 12 includes a correction unit 12B as shown in FIG.
- the correcting unit 12B calculates the final target engine speed based on the reference target engine speed. Specifically, as described with reference to FIG. 8, when the correction unit 12B does not execute the rotation speed correction, the correction target 12B sets the reference target engine rotation speed as the final target engine rotation speed. On the other hand, when executing the rotational speed correction, the correction unit 12B uses the best fuel efficiency engine rotational speed so that the fuel efficiency can be improved rather than driving the engine at the standard target engine rotational speed. Correction is made, and the result of the correction is made the final target engine speed.
- Rotation speed correction has various forms.
- the correction unit 12B gradually brings the final target engine speed from the reference target engine speed to the best fuel efficiency engine speed.
- the final target engine rotation speed gradually becomes the best.
- the correction amount is gradually changed so as to approach the fuel consumption engine rotation speed.
- the gradual change of the correction amount can be performed by repeatedly executing a process of adding or subtracting a predetermined value to the correction amount calculated in the previous process, for example.
- the correction unit 12B may integrate the difference between the reference target engine rotation speed and the best fuel efficiency engine rotation speed with time, and calculate the correction amount based on the integration value.
- a filter represented by a transfer function having a large time constant may be used for calculating the correction amount. Even in this case, a gradual change in the correction amount can be realized. In this way, by slowly changing the correction amount, even if the reference target engine speed changes due to, for example, a change in the accelerator operation amount, the change in the correction amount is small.
- the final target engine speed also changes by an amount corresponding to.
- the target gear ratio calculation unit 13 calculates the target gear ratio so that the actual engine speed becomes the final target engine speed. That is, the target speed ratio calculation unit 13 calculates the target speed ratio based on the final target engine speed and the speed of the mechanism downstream of the CVT 5.
- the target speed ratio calculation unit 13 in this example calculates the target speed ratio based on the final target engine speed and the vehicle speed detected by the sensor. For example, the target speed ratio calculation unit 13 calculates the target speed ratio based on a value obtained by dividing the final target engine rotation speed by the vehicle speed and the speed reduction ratio of the final speed reduction mechanism 7. When the speed ratio calculated in this way exceeds the upper limit or lower limit of the speed ratio of the CVT 5, the target speed ratio calculating unit 13 sets the upper limit or the lower limit as the target speed ratio.
- the control device 10 includes the reference throttle opening calculation unit 14 and the target driving force calculation unit 15 (see FIG. 3).
- the reference throttle opening calculation unit 14 converts the accelerator operation amount detected by the sensor into a throttle opening (throttle valve angle) using a map or relational expression stored in the storage device 10c in advance, and the result Is the reference throttle opening.
- the target driving force calculation unit 15 calculates a target value relating to the driving force of the vehicle, that is, the above-described target driving force based on the accelerator operation amount (more specifically, the reference throttle opening).
- the target driving force is, for example, the torque of the rear wheel 8 or the output of the rear wheel 8 (torque ⁇ rotational speed of the rear wheel 8).
- the target driving force calculation unit 15 includes a reference target driving force calculation unit 15A and a correction unit 15B.
- the reference target driving force calculation unit 15A calculates a reference target driving force based on the reference throttle opening and the engine speed obtained from the basic information.
- the reference target driving force is a target value input to the correction unit 15B described later.
- the reference target driving force calculation unit 15A calculates the reference target driving force based on the reference throttle opening and the reference target engine rotational speed obtained by referring to the first basic information and the second basic information. . This process is executed as follows, for example.
- an engine torque map that associates the engine speed, the throttle opening, and the engine torque is stored in the storage device 10c in advance.
- the reference target driving force calculation unit 15A calculates an engine torque corresponding to the reference target engine rotation speed and the reference throttle opening from the engine torque map (this engine torque is referred to as a reference target engine torque).
- the reference target driving force calculation unit 15A uses a map that associates the engine rotation speed, the throttle opening, and the engine output in place of the engine torque map, and from this map, the reference target engine rotation speed and the reference An engine output corresponding to the throttle opening may be calculated (this engine output is referred to as a reference target engine output).
- the reference target driving force calculation unit 15A converts the calculated reference target engine torque or reference target engine output into the torque of the rear wheel 8 or the output of the rear wheel 8, and uses the result as the reference target driving force. For example, when the target value for the torque of the rear wheel 8 is set as the target driving force, the reference target driving force calculation unit 15A calculates the inertia torque of the engine 4 based on the change speed of the reference target engine rotation speed. Then, the inertia torque is subtracted from the reference engine torque (reference engine torque-inertia torque), and the result of the subtraction is used as the reference target driving force.
- the reference target driving force calculation unit 15A subtracts the amount of change in output caused by the inertia torque from the reference engine output (reference engine output-inertia torque).
- the amount of change in output due to the above) and the result of the subtraction are used as the reference target driving force.
- the subtraction of the inertia torque or the change amount of the output due to the inertia torque does not necessarily have to be performed.
- the reference target driving force calculation unit 15A may subtract the torque lost in the CVT 5 in the process of transmitting the torque of the engine 4 to the rear wheel 8 or the output loss caused by the torque. Then, the result of the subtraction may be used as the reference target driving force.
- the torque lost in the CVT 5 can be calculated based on the rotational speed of the output shaft of the CVT 5 and the engine torque, for example, due to the torque lost to rotate the belt.
- the calculation of the reference target driving force is not limited to that described above.
- the reference target driving force may be calculated based on the first basic engine rotation speed or the second basic engine rotation speed instead of the reference target engine rotation speed.
- the reference target driving force calculation unit 15A refers to the engine torque map, calculates the engine torque corresponding to the first basic engine rotation speed and the reference throttle opening as the reference engine torque, and calculates the reference target from the reference engine torque.
- the driving force may be calculated.
- the correction unit 15B sets the reference target driving force as the target driving force when the driving force correction is not executed. On the other hand, when executing the driving force correction, the correcting unit 15B sets a value obtained by correcting the reference target driving force as the target driving force. Specifically, the correction unit 15B adds and / or multiplies a correction value to the reference target driving force and sets the calculation result as the target driving force.
- the correction unit 15B calculates a traveling load that acts on the vehicle when the vehicle travels uphill, and adds or multiplies a correction value according to the traveling load to the reference target driving force.
- the traveling load is calculated based on, for example, engine torque calculated based on the engine speed and the throttle opening, the engine speed changing speed, and the vehicle speed. Can be calculated based on
- the correction unit 15B increases the target driving force more than the reference target driving force or increases the reference target driving force when the reference target driving force increases, that is, when the vehicle is about to accelerate.
- the target drive force increase speed is made slower than the increase speed.
- the correction unit 15B may make the lowering speed of the target driving force slower than the lowering speed of the reference target driving force when the reference target driving force increases and then decreases.
- Such a change in the target driving force can be realized, for example, by using a filter represented by a transfer function including a proportional element and a first-order lag element with respect to the reference target driving force.
- the target throttle opening calculation unit 16 drives the engine 4 at the final target engine rotational speed, and the target throttle opening based on the target driving force and the final target engine rotational speed so that the driving force of the vehicle becomes the target driving force. Is calculated.
- the target throttle opening calculation unit 16 in the example shown in FIG. 3 includes a target engine torque calculation unit 16A and a throttle opening calculation unit 16B.
- the target engine torque calculation unit 16A converts the target driving force, which is a target value for the torque and output of the rear wheels 8, into the target engine torque (that is, target engine torque) using the final target engine rotation speed.
- the throttle opening calculation unit 16B calculates the target throttle opening based on the target engine torque and the final target engine speed.
- the target engine torque calculation unit 16A calculates the inertia torque of the engine 4 based on the change speed of the final target engine rotation speed, and based on the inertia torque, the torque lost in the CVT 5, and the final target engine rotation speed.
- the target driving force is converted into the target engine torque.
- the target driving force is a target value for the torque of the rear wheel 8
- the target engine torque calculation unit 16A is opposite to the reference target driving force calculation unit 15A, and the inertia torque and the torque lost in the CVT 5 Is added to the target driving force, and the result is the target engine torque.
- the target engine torque calculation unit 16A is, for example, the output change amount caused by the inertia torque and the CVT 5 in contrast to the reference target driving force calculation unit 15A.
- the output loss resulting from the lost torque is added to the target driving force, and the target engine torque is calculated based on the result of the addition (target engine output) and the final target engine speed.
- the throttle opening calculation unit 16B calculates a target throttle opening based on the target engine torque. Specifically, the throttle opening calculation unit 16B refers to a map that associates the engine torque, the throttle opening, and the engine rotation speed, and calculates the throttle opening that corresponds to the target engine torque and the final target engine rotation speed. The throttle opening is set as the target throttle opening.
- the processing of the target throttle opening calculation unit 16 is not limited to that described above.
- the target throttle opening calculation unit 16 calculates a target engine output based on the target driving force
- the throttle opening calculation unit 16B calculates the target throttle opening based on the target engine output.
- the storage device 10c stores a map that associates the engine output, the throttle opening, and the engine rotation speed. Then, the throttle opening calculation unit 16B refers to this map and calculates the target throttle opening based on the target engine output and the target engine rotation speed.
- the target engine rotational speed calculation unit 12 calculates the best fuel efficiency engine rotational speed when performing rotational speed correction, and the final target engine rotational speed based on the best fuel efficiency engine rotational speed and the reference target engine rotational speed. Is set.
- the best fuel efficiency engine rotational speed is calculated using, for example, the target driving force calculated by the target driving force calculation unit 15.
- the relationship between the output of the rear wheel 8 and the best fuel consumption engine rotation speed is stored in the storage device 10c.
- the target engine rotation speed calculation unit 12 refers to this map, and the best corresponding to the target driving force calculated by the target driving force calculation unit 15 is obtained.
- the fuel consumption engine rotation speed is calculated.
- the target engine rotational speed calculation unit 12 defines the best fuel consumption curve, for example, by multiplying the target driving force by the rotational speed of the rear wheel 8. In the map, the best fuel consumption engine speed corresponding to the multiplication result is calculated.
- the first basic engine rotation speed calculation unit 12a performs the first operation based on the first basic information that defines the engine rotation speed in the first operation mode (for example, the above-described low fuel consumption mode).
- the engine speed is calculated.
- the second basic engine rotational speed calculation unit 12b calculates the second engine rotational speed from the second basic information that defines the engine rotational speed in the second operation mode (for example, the acceleration response mode described above). Yes.
- the driving intention acquisition unit 17 acquires a driving intention value that is a numerical value representing the driving intention of the driver, and the target engine rotation speed calculation unit 12 calculates between the first engine rotation speed and the second engine rotation speed.
- the target engine speed (the final target engine speed in the above description) is calculated on the basis of the engine speed (in the above description, the reference target engine speed) corresponding to the driving intention value.
- the target gear ratio calculation unit 13 calculates the target gear ratio of the CVT 5 based on the final target engine rotation speed
- the throttle opening calculation unit 16B calculates the target driving force calculated based on the accelerator operation amount detected by the sensor.
- the target throttle opening is calculated based on the final target engine speed.
- the target engine rotation speed is calculated first, and then the target value related to the driving force is calculated. Therefore, it is possible to suppress the target value relating to the driving force of the vehicle from affecting the setting of the target engine speed. As a result, it becomes easy to control the engine speed so that a comfortable riding feeling can be obtained.
- the driving intention value is used to calculate the target engine rotation speed, an engine rotation speed suitable for the driver's driving intention can be realized.
- the engine rotation speed defined by the second basic information is a rotation speed that can realize an acceleration response better than the engine rotation speed defined by the first basic information, as described above.
- the target engine speed specifically, the reference target engine speed
- the target engine speed is obtained from the second basic information. It is possible to set the rotation speed close to the engine rotation speed.
- the present invention is not limited to the control device 10 described above, and various modifications can be made.
- the change of the driving intention value is restricted in a situation where the vehicle is turning.
- the limitation on the change in the driving intention value is not necessarily executed.
- control device 10 was able to perform both rotation speed correction and driving force correction.
- the control device 10 may be capable of only one of rotational speed correction and driving force correction.
- the control device 10 may not be able to perform both the rotational speed correction and the driving force correction. That is, the target driving force calculation unit 15 does not necessarily include the correction unit 15B. Further, the target engine rotation speed calculation unit 12 does not necessarily include the correction unit 12B.
- the target driving force and the reference target driving force are the target rear wheel 8 output or the rear wheel 8 torque.
- these may be target engine outputs or vehicle accelerations.
- the target engine rotational speed output by the correction unit 12B is referred to as the final target engine rotational speed.
- the final target engine rotational speed is further corrected, and based on the corrected target engine rotational speed.
- the target gear ratio and the like may be calculated.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- General Engineering & Computer Science (AREA)
- Transportation (AREA)
- Automation & Control Theory (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
- Control Of Transmission Device (AREA)
Abstract
無段変速機の変速比とスロットル開度とを電子制御する車両の制御装置において、快適な乗車感を得ることができ且つ運転者の運転意図に適合したエンジン回転速度を実現する。 記憶装置には、第1の運転モードでのエンジン回転速度を規定する第1のマップと、第2の運転モードでのエンジン回転速度を規定する第2のマップとが格納されている。制御装置は、運転者の運転意図を表す数値である運転意図値を取得する。制御装置は、第1のマップから算出される第1のエンジン回転速度と第2のマップから算出される第2のエンジン回転速度との間で、運転意図値に応じた基準目標エンジン回転速度を算出し、当該基準目標エンジン回転速度から目標エンジン回転速度を算出する。制御装置は、目標エンジン回転速度から目標変速比を算出する。制御装置は目標エンジン回転速度に基づいて車両の駆動力に関する目標値を算出し、その目標値に対応する駆動力が得られるように目標スロットル開度を算出する。
Description
本発明は、エンジンに供給する空気量を調整するスロットルバルブの開度と、無段変速機の変速機の双方を電子制御する車両の制御装置に関する。
従来、無段変速機の変速比とスロットルバルブの開度(以下、スロットル開度)とをアクチュエータを利用して電子制御する車両の制御装置がある(例えば、特許第3754188号公報)。従来の制御では、まず運転者によるアクセル操作の量(アクセル操作量)と車速とに基づいて要求駆動力が算出される。そして、この要求駆動力が得られるように、目標エンジン回転速度とスロットル開度とが算出される。
自動二輪車では、四輪の自動車に比して乗車感に対するエンジン回転速度の影響が大きいので、エンジン回転速度を快適な乗車感を実現する速度に設定したいとする要望が強い。ところが、従来の制御では、まず要求駆動力が算出され、その後に、その要求駆動力が得られるように目標エンジン回転速度が算出される。このような従来の制御では、目標エンジン回転速度が要求駆動力の影響を受けるので、快適な乗車感が得られるようにエンジン回転速度を制御することが難しい場合がある。
本発明の目的の一つは、無段変速機の変速比とスロットル開度とを電子制御する車両の制御装置において、快適な乗車感を得ることができ且つ運転者の運転意図に適合したエンジン回転速度を実現できる制御装置及びそれを備える自動二輪車を提供することにある。
本発明に係る制御装置は、無段変速機の変速比とスロットル開度とをアクチュエータを利用して電子制御する。前記制御装置は、車両の第1の運転モードでのエンジン回転速度を規定する第1の基礎情報と、車両の第2の運転モードでのエンジン回転速度を規定する第2の基礎情報とが予め格納された記憶装置と、前記第1の基礎情報から得られるエンジン回転速度を第1のエンジン回転速度として算出する第1の基礎エンジン回転速度算出部と、前記第2の基礎情報から得られるエンジン回転速度を第2のエンジン回転速度として算出する第2の基礎エンジン回転速度算出部と、運転者の運転意図を表す数値である運転意図値を取得する運転意図取得部と、前記第1のエンジン回転速度と前記第2のエンジン回転速度との間で算出され且つ前記運転意図値に応じたエンジン回転速度に基づいて、目標エンジン回転速度を算出する目標エンジン回転速度算出部と、前記目標エンジン回転速度に基づいて前記無段変速機の目標変速比を算出する目標変速比算出部と、センサーによって検知されたアクセル操作量と前記目標エンジン回転速度とに基づいて、車両の駆動力に関する目標値を算出する目標駆動力算出部と、前記目標値に対応する駆動力が得られるように前記目標値と前記目標エンジン回転速度とに基づいて目標スロットル開度を算出する目標スロットル開度算出部と、を備える。また、本発明に係る自動二輪車は上記制御装置を備える。
本発明によれば、従来の制御とは反対に、最初に目標エンジン回転速度が算出され、その後に駆動力に関する目標値が算出される。そのため、車両の駆動力に関する目標値が目標エンジン回転速度の設定に影響することを抑えることができる。その結果、快適な乗車感を得ることができるようにエンジン回転速度を制御することが容易となる。また、目標エンジン回転速度の算出に運転意図値を利用するので、運転者の運転意図に適合したエンジン回転速度を実現できる。例えば、第2の基礎情報で規定されるエンジン回転速度は、第1の基礎情報で規定されるエンジン回転速度よりも良好な加速応答性を実現できる回転速度である。このような例において、運転者が加速応答性の良い走行を望んでいる場合には、目標エンジン回転速度を第2の基礎情報から得られる第2のエンジン回転速度に近い回転速度に設定することが可能となる。なお、目標エンジン回転速度は、運転意図値に応じたエンジン回転速度と同じでもよいし、運転意図値に応じたエンジン回転速度の補正により得られるエンジン回転速度でもよい。なお、車両の駆動力に関する目標値とは、例えば、駆動輪のトルクや駆動輪の出力についての目標値である。また、車両の駆動力に関する目標値は、エンジントルクについての目標値や、エンジン出力についての目標値、車両の加速度についての目標値などでもよい(車両の加速度と車重との積は車両の駆動力となる)。
前記運転意図取得部は、車両の運転状態に基づいて前記運転意図値を算出してもよい。これによれば、運転者の操作によることなく運転意図値を取得できる。
前記目標エンジン回転速度部は、前記運転意図値に応じた前記エンジン回転速度を補正し、その補正後のエンジン回転速度を目標エンジン回転速度として算出してもよい。これによれば、例えば補正により目標エンジン回転速度を下げることにより、燃費の良い走行を実現できる。
前記第1の基礎情報はアクセル操作量と第1の運転モードにおけるエンジン回転速度とを対応付け、前記第2の基礎情報はアクセル操作量と第2の運転モードにおけるエンジン回転速度とを対応付けてもよい。この場合、前記第1の基礎エンジン回転速度算出部は前記第1の基礎情報を参照し、前記センサーによって検知したアクセル操作量に基づいて前記第1のエンジン回転速度を算出してもよい。また、前記第2の基礎エンジン回転速度算出部は前記第2の基礎情報を参照し、前記センサーによって検知したアクセル操作量から前記第2のエンジン回転速度を算出してもよい。
前記運転意図取得部は、車両が予め定める走行状況にある場合に、前記運転意図値の変化を制限してもよい。ここで、前記予め定める走行状況は、運転者による加速要求が増すと推定される走行状況であり、前記運転意図取得部は、運転者による加速要求が増すと推定される走行状況では、前記運転意図値に応じた前記エンジン回転速度が下がる方向への変化が抑えられるように運転意図値の変化を制限してもよい。これによれば、加速要求が増すと推定される走行状況では、運転意図値が変化することにより加速応答性が低下することを抑えることができる。前記予め定める走行状況は、例えば、車両がカーブを走行している場合、ブレーキ装置が作動している場合、又は車両が登坂を走行している場合である。
以下、本発明の一実施形態について図面を参照しながら説明する。図1は本発明の実施形態に係る制御装置10を備える自動二輪車1の側面図である。図2は自動二輪車1の構成を示すブロック図である。
図1に示すように、自動二輪車1は前輪2と後輪8とを有している。前輪2には前輪2の回転速度に応じた信号を出力する前輪回転速度センサ28(図2参照)が設けられ、後輪8には後輪8の回転速度に応じた信号を出力する後輪回転速度センサ27(図2参照)が設けられている。制御装置10は、前輪回転速度センサ28又は後輪回転速度センサ27の出力に基づいて車速を算出する。自動二輪車1は前輪2を操舵するためのステアリング3を有している。ステアリング3の左右にはグリップ3aが設けられている。一方のグリップ3aはアクセルグリップとして機能し、アクセルグリップにはその操作量(アクセル操作量)を検知するためのアクセルセンサ24(図2参照)が設けられている。前輪2と後輪8とにはこれらを制動するためのブレーキ装置が設けられ、ステアリング3にはブレーキ装置を作動させるためのブレーキレバー3bが設けられている。ブレーキレバー3bにはその操作を検知するためのブレーキスイッチ29(図2参照)が設けられている。
図2に示すように、自動二輪車1は、エンジン4から駆動輪である後輪8に至るトルク伝達経路に、無段変速機(以下、CVT)5と、クラッチ6と、最終減速機構7とを有している。この例では、エンジン4の下流にCVT5が配置され、CVT5の下流にクラッチ6が配置されている。また、クラッチ6と後輪8との間に最終減速機構7が配置されている。クラッチ6は遠心クラッチなどの自動クラッチである。
エンジン4は、シリンダや、シリンダ内に配置されるピストン、ピストンに連結されるクランクシャフトなどを有している。自動二輪車1はエンジン回転速度を検知するためのエンジン回転速度センサ21を有している。また、エンジン4は、その燃焼室に繋がる吸気通路に、エンジン4に供給する空気量を制御するスロットルバルブ及びエンジン4に燃料を供給するインジェクタを有している。自動二輪車1は、スロットルバルブの開度(以下スロットル開度)を検知するためのスロットル開度センサ22、及び、スロットルバルブを制御するスロットルアクチュエータ23を有している。
CVT5は、クランクシャフトに連動する入力軸と、入力軸上に配置される駆動プーリと、出力軸と、出力軸上に配置される被駆動プーリと、駆動プーリと被駆動プーリとに掛け渡され、駆動プーリの回転(トルク)を被駆動プーリに伝えるベルトとを有している。自動二輪車1は、CVT5の変速比を制御するためのCVTアクチュエータ25を有している。CVTアクチュエータ25は、例えば、駆動プーリを構成する2つのシーブのうち一方を動かして、変速比を制御する。また、CVTアクチュエータ25は被駆動プーリを構成する2つのシーブのうち一方を動かして、変速比を制御してもよい。CVT5には、CVT5の出力軸の回転速度を検知するための出力軸回転速度センサ26が設けられている。
制御装置10は、記憶装置10cと、記憶装置10cに格納されたプログラムを実行するマイクロプロセッサとを含んでいる。記憶装置10cには、エンジン4及びCVT5の制御に利用されるマップが格納されている。制御装置10は、主にエンジン4の制御を担うマイクロプロセッサと、主にCVT5の制御を担うマイクロプロセッサとを含んでもよい。この場合、2つのマイクロプロセッサは予め規定されたプロトコルに従って通信し、互いが算出した情報を送受信する。センサ21,22,24,26,27,28,29の出力信号は制御装置10に入力される。制御装置10はセンサ21,22,24,26,27,28,29の出力信号に基づいてアクチュエータ23,25を動かし、CVT5及びエンジン4を制御する。制御装置10はCVTアクチュエータ25を通してCVT5の変速比を制御し、スロットルアクチュエータ23を通してスロットル開度を制御する。
制御装置10が実行する処理について説明する。図3は制御装置10が実行する処理を示すブロック図である。同図に示すように、制御装置10は、目標エンジン回転速度算出部12と、目標変速比算出部13と、基準スロットル開度算出部14と、目標駆動力算出部15と、目標スロットル開度算出部16と、運転意図取得部17とを含んでいる。各部で実行される制御部10の処理は、車両の走行中に所定の周期で実行され、CVT5の目標変速比と目標スロットル開度はその周期で更新される。
目標エンジン回転速度算出部12は、アクセルセンサ24で検知するアクセル操作量に基づいて、目標エンジン回転速度を算出する。ここで説明する例の目標エンジン回転速度算出部12は、最初にアクセルセンサ24で検知するアクセル操作量に基づいて基準目標エンジン回転速度を算出する。その後、目標エンジン回転速度算出部12は、基準目標エンジン回転速度について補正処理を行う場合には補正後のエンジン回転速度を目標エンジン回転速度とし、基準目標エンジン回転速度について補正処理を行わない場合には基準目標エンジン回転速度を目標エンジン回転速度とする。以下では、目標エンジン回転速度算出部12が算出するエンジン回転速度(すなわち、補正後のエンジン回転速度及び補正処理を行わない場合の基準目標エンジン回転速度)を最終目標エンジン回転速度と称する。例えば、目標エンジン回転速度算出部12は、基準目標エンジン回転速度でエンジンを駆動するよりも燃費が良くなるように基準目標エンジン回転速度を補正し、補正後のエンジン回転速度を最終目標エンジン回転速度とする。目標変速比算出部13は、実際のエンジン回転速度が最終目標エンジン回転速度になるように、最終目標エンジン回転速度に基づいてCVT5の変速比についての目標値である目標変速比を算出する。制御装置10はCVT5の実際の変速比が目標変速比になるようにCVTアクチュエータ25を駆動する。
目標駆動力算出部15は、アクセルセンサ24で検知したアクセル操作量と上述の基準目標エンジン回転速度とに基づいて車両の駆動力に関する目標値を算出する。ここで、車両の駆動力に関する目標値は、例えば後輪8のトルクや後輪8の出力についての目標値である。また、車両の駆動力に関する目標値は、エンジントルクについての目標値や、エンジン出力についての目標値などでもよい。以下では、駆動力に関する目標値を目標駆動力と称する。目標スロットル開度算出部16は、最終目標エンジン回転速度でエンジンを駆動しながら目標駆動力が得られるように、目標駆動力と最終目標エンジン回転速度とに基づいて目標スロットル開度を算出する。制御装置10は実際のスロットル開度が目標スロットル開度になるようにスロットルアクチュエータ23を駆動する。
このように、本実施形態では、従来の制御とは反対に、最初に目標エンジン回転速度が算出され、その後に目標駆動力が算出される。そのため、車両の目標駆動力が目標エンジン回転速度の設定に影響することを抑えることができる。その結果、快適な乗車感を実現できるようにエンジン回転速度を制御することが容易となる。特に本実施形態では、最初にアクセル操作量と基準目標エンジン回転速度とに基づいて目標駆動力が算出される。その後に、基準目標エンジン回転速度から得られた最終目標エンジン回転速度と、目標駆動力とに基づいて目標スロットル開度が算出される。そのため、例えば、エンジン4の回転速度を最終目標エンジン回転速度に維持しながら、車両の駆動力を調節・制御できる。例えば、エンジン4の回転速度を最終目標エンジン回転速度に維持しながら、基準目標エンジン回転速度とアクセル操作量に対応するスロットル開度とでエンジン4を駆動した場合に得られる駆動力と同じ駆動力を得ることが可能となる。また、目標駆動力について補正処理を行う場合には、エンジン4の回転速度を最終目標エンジン回転速度に維持しながら、その補正後の目標駆動力が得られるようにエンジン4を駆動することが可能となる。
図3に示すように、目標エンジン回転速度算出部12は基準目標エンジン回転速度算出部12Aを含んでいる。基準目標エンジン回転速度算出部12Aは、センサーで検知したアクセル操作量と、運転意図を表す数値(以下、運転意図値と称する)とに基づいて、基準目標エンジン回転速度を算出する。具体的には次のような処理を行う。記憶装置10cには、第1の運転モードでのエンジン回転速度を規定する第1の基礎情報(例えばマップ)と、第2の運転モードでのエンジン回転速度を規定する第2の基礎情報とが予め格納されている。これらの運転モードは、加速応答性の良い運転モード(加速応答性モード)や、燃費の良い運転モード(低燃費モード)、通常の運転モードなどである。2つの基礎情報のそれぞれでは、例えばエンジン回転速度とアクセル操作量とが関係づけられている。基準目標回転速度算出部12Aは、センサーで検知したアクセル操作量に基づいて2つの基礎情報のそれぞれからエンジン回転速度を算出する。そして、基準目標回転速度算出部12Aは、2つの基礎情報からそれぞれ算出された2つのエンジン回転速度の間で運転意図値に基づいて基準目標エンジン回転速度を算出する。
運転意図値は、車両の走行形態に対する運転者の要求を表す数値である。例えば、運転意図値は、加速応答性モードに対する運転者の要求度合いや、低燃費モードに対する運転者の要求度合いを表す数値である。後において説明するように、運転意図値は、例えば現在の車両の運転状態と過去の運転状態のうち少なくとも一方に基づいて算出される。例えば、アクセル操作量の変化速度が大きい場合や、アクセル操作量の変化の頻度が多い場合には、運転者は加速応答性の良い走行を望んでいると推定される。一般的に、エンジン回転速度が高くなると加速応答性は良くなり、エンジン回転速度が低くなると燃費が良くなる。そのため、運転者が加速応答性の良い走行を強く求めていることを運転意図値が示す場合には、制御装置10は基準目標エンジン回転速度を高めに設定する。
図4は基準目標エンジン回転速度算出部12Aが実行する処理を示すブロック図である。同図に示すように、基準目標エンジン回転速度算出部12Aは、第1基礎エンジン回転速度算出部12aと、第2基礎エンジン回転速度算出部12bと、演算部12cとを含んでいる。
上述したように、記憶装置10cにはエンジン回転速度とアクセル操作量とを関係づける第1の基礎情報と、エンジン回転速度とアクセル操作量とを関係づける第2の基礎情報とが格納されている。第1基礎エンジン回転速度算出部12aと第2基礎エンジン回転速度算出部12bは、第1の基礎情報と第2の基礎情報をそれぞれ利用して、センサーで検知したアクセル操作量に応じたエンジン回転速度を算出する。以下では、第1の基礎情報から得られたエンジン回転速度を第1基礎エンジン回転速度とし、第2の基礎情報から得られたエンジン回転速度を第2基礎エンジン回転速度とする。演算部12cは、第1基礎エンジン回転速度と、第2基礎エンジン回転速度と、運転意図値とに基づいて、基準目標エンジン回転速度を算出する。より具体的には、演算部12cは、第1基礎エンジン回転速度と第2基礎エンジン回転速度との間で算出され且つ運転意図値に応じたエンジン回転速度を、基準目標エンジン回転速度として算出する。
第1の基礎情報で規定されるエンジン回転速度と、第2の基礎情報で規定されるエンジン回転速度は互いに異なっている。例えば、第2の基礎情報で規定されるエンジン回転速度は、第1の基礎情報で規定されるエンジン回転速度よりも良好な加速応答性を実現できる回転速度である。換言すると、第1の基礎情報で規定されるエンジン回転速度は、第2の基礎情報で規定されるエンジン回転速度よりも低燃費を実現できる回転速度である。すなわち、第2の基礎情報は加速応答性モードでのエンジン回転速度を規定し、第1の基礎情報は低燃費モードでのエンジン回転速度を規定している。一般的に、エンジン回転速度が高くなると加速応答性は良くなり、エンジン回転速度が低くなると燃費が良くなる。そのため、第2の基礎情報で規定されるエンジン回転速度は、第1の基礎情報で規定されるエンジン回転速度よりも高い。
2つの基礎情報のそれぞれは、例えば、エンジン回転速度とアクセル操作量とに、車速に関する情報を関係づけるマップである。ここでは、記憶装置10cが、第1の基礎情報として第1エンジン回転速度マップを有し、第2の基礎情報として第2エンジン回転速度マップを有する場合を例にして説明する。
車速に関する情報とは、例えば、前輪2の回転速度や後輪8の回転速度から算出される車速自体である。また、車速に関する情報は、後輪8の回転速度や、CVT5の出力軸の回転速度、最終減速機構7を構成する部材の回転速度、クラッチ6を構成する部材の回転速度など、トルク伝達経路においてCVT5の出力軸以降の部材の回転速度でもよい。すなわち、車速に関する情報は、係数や減速比を乗じることにより車速に換算され得る情報である。CVT5の出力軸の回転速度は、クラッチ6が係合している状態では、車速に換算され得る。ここでは、第1及び第2の基礎情報として、車速と、アクセル操作量と、エンジン回転速度とが対応付けられている第1及び第2エンジン回転速度マップを用いる場合を例にして説明する。
図5は、基礎情報であるエンジン回転速度マップの例を示す図である。同図の(a)は第1エンジン回転速度マップの例であり、(b)は第2エンジン回転速度マップの例である。これらの図で横軸は車速であり、縦軸はエンジン回転速度である。また、これらの図では、エンジン回転速度と車速との関係を示す複数の線が例示されている。これらの線は、アクセル操作量Ac1,Ac2,Ac3でのエンジン回転速度と車速との関係を示している。同図の線Lowは変速比がローに設定されている場合の車速とエンジン回転速度との関係を示し、線Highは変速比がハイ(トップ)に設定されている場合の車速とエンジン回転速度との関係を示している。
第2エンジン回転速度マップで規定されるエンジン回転速度は、第1エンジン回転速度マップで規定されるエンジン回転速度よりも高い。例えば、アクセル操作量がAc1で、車速がV1である場合、第2エンジン回転速度マップで規定されるエンジン回転速度Ne2は、第1エンジン回転速度マップで規定されるエンジン回転速度Ne1よりも高い。つまり、同じアクセル操作量且つ同じ車速で2つのマップのエンジン回転速度を比較した場合、第2エンジン回転速度マップのエンジン回転速度は、第1エンジン回転速度マップのエンジン回転速度よりも高い。なお、第2エンジン回転速度マップのエンジン回転速度は、必ずしも車速の全範囲で、第1エンジン回転速度マップのエンジン回転速度よりも高くなくてもよい。例えば、中車速の領域でのみ、第2エンジン回転速度マップのエンジン回転速度は第1エンジン回転速度マップのエンジン回転速度よりも高くてもよい。
第1基礎エンジン回転速度算出部12aは第1の基礎情報である第1エンジン回転速度マップを参照し、センサーによって検知したアクセル操作量と車速とに対応するエンジン回転速度を、第1基礎エンジン回転速度として算出する。同様に、第2基礎エンジン回転速度算出部12bは第2の基礎情報である第2エンジン回転速度マップを参照し、センサーによって検知したアクセル操作量と車速とに対応するエンジン回転速度を、第2基礎エンジン回転速度として算出する。
なお、2つの基礎情報のうち一方は、エンジン回転速度と、車速に関する情報と、アクセル操作量とを関係づけるマップではなくてもよい。例えば、第2の基礎情報は、第1基礎エンジン回転速度と第2基礎エンジン回転速度との差と、車速と、アクセル操作量とが関係づけられるマップでもよい。また、第2の基礎情報は、第1基礎エンジン回転速度と第2基礎エンジン回転速度との比と、車速と、アクセル操作量とが関係づけられるマップでもよい。この場合、第2基礎エンジン回転速度算出部12bは、センサーによって検知したアクセル操作量と車速とに対応する差又は比を算出し、その後、その差又は比と、第1エンジン回転速度マップを参照して算出された第1基礎エンジン回転速度とに基づいて第2基礎エンジン回転速度を算出する。また、第2の基礎情報は、車速やアクセル操作量に依存しない、第1基礎エンジン回転速度と第2基礎エンジン回転速度との差や比であってもよい。この場合、第2基礎エンジン回転速度算出部12bは、その差又は比と、第1エンジン回転速度マップを参照して算出された第1基礎エンジン回転速度とに基づいて第2基礎エンジン回転速度を算出する。
演算部12cは、第1基礎エンジン回転速度と第2基礎エンジン回転速度との間で、運転意図取得部17によって算出される運転意図値に応じたエンジン回転速度を算出する。このように算出されるエンジン回転速度が、上述の基準目標エンジン回転速度である。上述したように、運転意図値は、車両の走行形態に対する運転者の要求度合いを表す数値である。例えば、運転意図値が加速応答性の良い走行に対する運転者の要求度合いを表す数値である場合、演算部12cは、運転意図値が高くなるに従って基準目標エンジン回転速度を第2基礎エンジン回転速度に近づける。運転意図値が燃費の良い走行に対する運転者の要求度合いを表す数値である場合、演算部12cは、運転意図値が高くなるに従って基準目標エンジン回転速度を第1基礎エンジン回転速度に近づける。つまり、演算部12cは、運転意図値が高くなるに従って、2つの基礎エンジン回転速度のうち一方に基準目標エンジン回転速度を近づける。
図6は演算部12cの処理の例を説明するための図である。同図において横軸は運転意図値であり、縦軸はエンジン回転速度である。同図の線L7は、点Po1(運転意図値Dv1,第1基礎エンジン回転速度Na)と、点Po2(運転意図値Dv2,第2基礎エンジン回転速度Nb)とを通る直線である。運転意図値がDv3(Dv1<Dv3<Dv2)である場合、演算部12cは線L7上の点Po3(運転意図値Dv3,エンジン回転速度Nc)のエンジン回転速度Ncを基準目標エンジン回転速度として算出する(Na<Nc<Nb)。つまり、図6の例では、演算部12cは、第1基礎エンジン回転速度Naと第2基礎エンジン回転速度Nbとの間で、エンジン回転速度を運転意図値によって線形補完し、運転意図取得部17によって算出された運転意図値Dv3に対応するエンジン回転速度を基準目標エンジン回転速度としている。
一例では、運転意図値Dv1は、運転意図取得部17によって算出され得る運転意図値の最小値であり、運転意図値Dv2は運転意図取得部17によって算出され得る運転意図値の最大値である。つまり、運転意図取得部17が運転意図値の最小値を算出する場合には、第1基礎エンジン回転速度Naが基準目標エンジン回転速度として算出される。一方、運転意図取得部17が運転意図値の最大値を算出する場合には、第2基礎エンジン回転速度Nbが基準目標エンジン回転速度として算出される。
演算部12cの処理はこれに限られない。例えば、運転意図値は運転意図値Dv1よりも低い値であってもよい。運転意図取得部17が算出する運転意図値がDv1より小さい場合、演算部12cは、例えば運転意図値によらず第1基礎エンジン回転速度を基準目標エンジン回転速度とする。また、運転意図値は運転意図値Dv2よりも高い値であってもよい。運転意図取得部17が算出する運転意図値がDv2より大きい場合、演算部12cは、例えば、運転意図値によらず第2基礎エンジン回転速度を基準目標エンジン回転速度とする。
運転意図取得部17の処理の例について説明する。運転意図取得部17は、センサによって検知される車両の運転状態に基づいて運転意図値を算出する。例えば、運転意図取得部17は、アクセル操作量、車速、アクセル操作量の微分値であるアクセル操作量変化速度及び加速度から選ばれる少なくとも1以上のパラメータに基づいて運転意図値を算出する。
例えば、運転意図取得部17は、アクセル操作量と車速とに基づいて第1負荷状態値を算出する。また、運転意図取得部17は、アクセル操作量の変化速度に基づいて第2負荷状態値を算出する。さらに運転意図取得部17は、車速と車両の加速度とに基づいて第3負荷状態値を算出する。運転意図取得部17は、これら負荷状態値の全て或いは一部を使用して、運転意図値を算出する。各負荷状態値は、エンジン4にかかっている負荷が変化する可能性を評価する数値である。
例えば、エンジンにかかっている負荷が変化する可能性が高いほど、運転者が加速応答性の良い走行を要求する度合いが高いと推定される。そのため、加速応答性の良い走行に対する運転者の要求度合いを表す数値を運転状態値として用いる例においては、エンジンにかかっている負荷が変化する可能性が高いほど、運転意図取得部17は大きな運転意図値を算出する。
また、例えば、エンジンにかかっている負荷が変化する可能性が低いほど、運転者が燃費の良い走行を要求する度合いが高いと推定される。そのため、燃費の良い走行に対する運転者の要求度合いを表す数値を運転状態値として用いる例においては、エンジンにかかっている負荷が変化する可能性が低いほど、運転意図取得部17は大きな運転意図値を算出する。
図7(a)は、アクセル操作量と車速と第1負荷状態値とを対応付けるマップの例である。同図において、実線は第1負荷状態値の等高線を示している。このマップでは、負荷が変化する可能性が低いと推測される運転領域(例えば、車速とアクセル操作量の双方が中程度の領域)では、第1負荷状態値は比較的小さい。運転意図取得部17は、例えばこのマップを参照し、センサの出力に基づいて検知されたアクセル操作量と車速とから第1負荷状態値を算出する。
図7(b)は、アクセル操作量の変化速度と第2負荷状態値とを対応付けるマップの例である。このマップにおいても、負荷が変化する可能性が小さいと推測される運転領域、すなわちアクセル操作量の変化速度が小さい運転領域では、第2負荷状態値は比較的小さい。運転意図取得部17はアクセル操作量の変化速度を算出し、その後、このマップを参照して、算出したアクセル操作量の変化速度に対応する第2負荷状態値を算出する。
図7(c)は、車速と車両の加速度と第3負荷状態値とを対応付けるマップの例である。この図において、実線は第3負荷状態値の等高線を示している。このマップにおいても、負荷が変化する可能性が低いと推測される運転領域、具体的には、車速が中程度で加速度が小さい運転領域では、第3負荷状態値は小さい。運転意図取得部17は、このマップを参照し、センサの出力に基づいて検知された車速と加速度とに対応する第3負荷状態値を算出する。
運転意図取得部17は、上述の3つの負荷状態値のなかから運転意図値の算出に使用する負荷状態値を選択し、選択した負荷状態値に基づいて運転意図値を算出してもよい。例えば、運転意図取得部17は、上述の全ての負荷状態値の符号が一致する場合には、全ての負荷状態値を使用して運転意図値を算出する。一方、3つの負荷状態値のなかにその符号が一致しないものがある場合には、運転意図取得部17はいずれの負荷状態値も使用せず、今回の処理では運転意図値を算出しない。すなわち、運転意図取得部17は前回の処理で得られた運転意図値を更新しない。また、運転意図取得部17は、第1負荷状態値、第2負荷状態値及び第3負荷状態値のうち符号が一致する負荷状態値を選択し、選択した負荷状態値を使用して運転意図値を算出してもよい。
また、運転意図取得部17は、選択した負荷状態値と、前回の処理で得られた運転意図値とに基づいて、運転意図値を算出してもよい。例えば、運転意図取得部17は選択した負荷状態値の積を算出し、その積を前回の処理で得られた運転意図値に加算し、その加算の結果を新たな運転意図値としてもよい。また、運転意図取得部17は選択した負荷状態値の和を算出し、その和を前回の処理で得られた運転意図値に加算し、その加算の結果を新たな運転意図値としてもよい。また、運転意図取得部17は選択した負荷状態値の平均値又は中央値を算出し、その平均値又は中央値を前回の処理で得られた運転意図値に加算し、その加算の結果を新たな運転意図値としてもよい。
運転意図取得部17は、車両が予め定める走行状況にある場合には、運転意図値の変化を制限する。例えば、運転意図取得部17は、運転者による加速要求が増すと推定される走行状況においては、基準目標エンジン回転速度の低下が抑えられるように運転意図値の変化を制限する。つまり、運転意図取得部17は、運転者による加速要求が増すと推定される走行状況においては、基準目標エンジン回転速度の第1基礎エンジン回転速度に向けた変化が抑制されるように運転意図値の変化を制限する。換言すると、基準目標エンジン回転速度として第1基礎エンジン回転速度が算出される運転意図値を第1の値とし、基準目標エンジン回転速度として第2基礎エンジン回転速度が算出される運転意図値を第2の値とした場合、運転意図取得部17は、運転意図値の第2の値から第1の値に向けた変化を制限する。
制限の一例では、運転意図取得部17は、車両が上述の走行状況を脱するまで、運転意図値を車両が当該走行状況に入った時点での値に維持する。また、制限の他の例では、運転意図取得部17は、車両が上述の予め定める走行状況を脱するまで、運転意図値を第2の値に向けて変化させてもよい。
こうすることにより、運転者による加速要求が増すと推定される走行状況において、加速応答性が下がることを抑えることができる。なお、本実施形態では基準目標エンジン回転速度自体の変化が抑えられるのではなく、運転意図値の変化が抑えられる。そのため、第1基礎エンジン回転速度と第2基礎エンジン回転速度とに対する基準目標エンジン回転速度の相対的な関係(例えば、差)の変化が抑えるものの、アクセル操作量が変化する場合には第1基礎エンジン回転速度と第2基礎エンジン回転速度は変化するので、基準目標エンジン回転速度自体は変化する。
運転者による加速要求が増すと推定される走行状況の一例は、車両が旋回している状況である。車両が曲がり道で旋回している場合には車速が下げられ、その後、車両が直線走行を開始すると、運転者は加速要求を増し、車速が上昇する。車両が旋回しているか否かの判定次のように実行され得る。
自動二輪車が旋回する場合、車体が傾けられる。その結果、タイヤは、その幅方向の中心ではなく、タイヤの側部に寄った位置で地面に接触する(以下、タイヤ表面における地面に接触する部分を接地点と称する)。その結果、接地点と車軸との距離(前輪の回転半径及び後輪の回転半径)が小さくなる。前輪のタイヤの太さ(タイヤの断面の半径)と後輪のタイヤの太さ(タイヤの断面の半径)との間には差があるため、前輪の回転半径の減少率と、後輪の回転半径の減少率との間に差が生じる。具体的には、後輪のタイヤが前輪のタイヤに比べて太い場合には、後輪の回転半径の減少率は前輪の回転半径の減少率よりも大きくなる。その結果、後輪の回転速度から算出される車速は、前輪の回転速度から算出される車速はよりも高くなる。そこで、運転意図取得部17は、前輪2の回転速度から算出される車速と、後輪8の回転速度から算出される車速との差に基づいて、車両が旋回しているか否かを判定する。例えば、後輪の回転速度から算出される車速と前輪の回転速度から算出される車速との差、或いは、2つの車速の平均に対する2つの車速の差の割合が、閾値を超えた場合に、車両が旋回していると判定する。
なお、車両が旋回しているか否かの判定は上述の処理に限られない。例えば、自動二輪車には、車体の左右方向への傾斜を検知するための加速度センサが設けられてもよい。この場合、運転意図取得部17は、例えば車体が傾いており且つ車速が閾値よりも高い場合に、車両が旋回していると判定する。
運転者による加速要求が増すと推定される走行状況の他の例は、ブレーキ装置が作動している場合である。自動二輪車1には、例えばブレーキレバー3bの操作を検知するためのスイッチ29や、前輪2又は後輪8に設けられたブレーキ装置の作動状態を検知するためのセンサが設けられる。運転意図取得部17は、それらのスイッチやセンサの出力に基づいてブレーキ装置が作動しているか否かを判定する。
運転者による加速要求が増すと推定される走行状況の他の例は、車両が登坂を走行している場合である。運転意図取得部17は、例えば車速、現在のエンジン回転速度、及び現在のスロットル開度に基づいて走行負荷を算出し、その走行負荷に基づいて車両が登坂を走行しているか否かを判定する。
車両の加速度をaとし、車両の重量をMとし、エンジントルクをTegとし、エンジン4の慣性トルクをTiとし、CVT5から後輪8に至る経路でのトルクの機械的な損失をTlossとし、車両に作用している全走行負荷をLvとした場合、これらは概ね次の関係を有している。なお、全走行負荷Lvは空気抵抗など水平な道を走行する場合の走行抵抗(以下、基準走行抵抗と称する)を含む。
(Teg-Ti)×変速比-Tloss=(M×a+Lv)×k
エンジントルクTegは、スロットル開度とエンジン回転速度とエンジントルクとの関係を示すエンジントルクマップを参照することで算出される。慣性トルクTiは、エンジン回転速度の変化速度と、CVT5よりも上流側の機構(エンジン4のクランクシャフトやピストン)の慣性モーメントとを乗じた値である。変速比は、例えば現在のCVT5の実変速比であり、センサを通して検知する実エンジン回転速度と車速とから算出され得る。kは後輪8の半径や最終減速機構7の減速比から得られる係数である。そこで、運転意図取得部17は、例えば、エンジン回転速度とスロットル開度とに基づいてエンジントルクTegを算出し、当該エンジントルクTegとエンジン回転速度の変化速度と車速とに基づいて、上述の関係式から全走行負荷Lvを算出する。運転意図取得部17は、空気抵抗等に起因する基準走行抵抗を全走行負荷Lvから差し引いた値を走行負荷として算出する。このように算出される走行負荷は、一般的に、車両が登坂を走行している場合には正の値となる。なお、基準走行抵抗は車速が高くなるに従って大きくなる。車速と基準走行抵抗との関係は予め実験等により得られる。そこで、運転意図取得部17は、例えば車速と基準走行抵抗とを対応づけるマップや関係式を参照し、車速に基づいて基準走行抵抗を算出する。
(Teg-Ti)×変速比-Tloss=(M×a+Lv)×k
エンジントルクTegは、スロットル開度とエンジン回転速度とエンジントルクとの関係を示すエンジントルクマップを参照することで算出される。慣性トルクTiは、エンジン回転速度の変化速度と、CVT5よりも上流側の機構(エンジン4のクランクシャフトやピストン)の慣性モーメントとを乗じた値である。変速比は、例えば現在のCVT5の実変速比であり、センサを通して検知する実エンジン回転速度と車速とから算出され得る。kは後輪8の半径や最終減速機構7の減速比から得られる係数である。そこで、運転意図取得部17は、例えば、エンジン回転速度とスロットル開度とに基づいてエンジントルクTegを算出し、当該エンジントルクTegとエンジン回転速度の変化速度と車速とに基づいて、上述の関係式から全走行負荷Lvを算出する。運転意図取得部17は、空気抵抗等に起因する基準走行抵抗を全走行負荷Lvから差し引いた値を走行負荷として算出する。このように算出される走行負荷は、一般的に、車両が登坂を走行している場合には正の値となる。なお、基準走行抵抗は車速が高くなるに従って大きくなる。車速と基準走行抵抗との関係は予め実験等により得られる。そこで、運転意図取得部17は、例えば車速と基準走行抵抗とを対応づけるマップや関係式を参照し、車速に基づいて基準走行抵抗を算出する。
運転意図取得部17の処理は以上説明したものに限定されない。例えば、自動二輪車1は、車両の走行形態に対する運転者の要求を受け付けるための操作部材を有してもよい。例えば自動二輪車1は、運転者が加速応答性の良い走行に対する要求度合いを入力できる操作部材を有してもよい。この場合、運転意図取得部17は、その操作部材の操作量を検知し、当該操作量を運転意図値とする。
基準目標エンジン回転速度が算出された後の処理の概要について説明する。図8は処理の概要を説明するための図である。同図の横軸はエンジン回転速度であり、縦軸はエンジントルクである。同図には、エンジントルクとエンジン回転速度との関係を表すトルクカーブが描かれている。同図(a)ではスロットル開度がTh1,Th2でのトルクカーブが示され、同図(b)ではスロットル開度がTh1,Th4,Th6でのトルクカーブが示されている。同図(a)及び(b)において線Aは、燃費が最良になる運転ポイントを示す曲線(以下、最良燃費曲線)である。同図(a)及び(b)の線L3は、運転ポイントP1(エンジン回転速度N1,スロットル開度Th1)と同じエンジン出力(エンジントルク×エンジン回転速度)を得ることができる運転ポイントを示す等出力曲線である。同図(b)の線L4は、運転ポイントP4(エンジン回転速度N1,スロットル開度Th4)と同じエンジン出力を得ることができる運転ポイントを示す等出力曲線である。図8では、エンジン回転速度N1が基準目標エンジン回転速度であり、スロットル開度Th1は、アクセル操作量から換算されたスロットル開度(以下、基準スロットル開度)である。
なお、本実施形態の制御装置10は、目標エンジン回転速度についての補正である回転速度補正と、車両の駆動力に関する目標値についての補正である駆動力補正の一方又は双方を行う場合がある。
目標エンジン回転速度算出部12は、上述したように、基準目標エンジン回転速度N1を算出する。回転速度補正を行う場合、目標エンジン回転速度算出部12は、基準目標エンジン回転速度N1を補正し、その補正の結果を最終目標エンジン回転速度とする。目標エンジン回転速度算出部12は、例えば、基準目標エンジン回転速度でエンジン4を駆動するよりも燃費が向上するように、基準目標エンジン回転速度に基づいて最終目標エンジン回転速度を算出する。例えば図8(a)で示すように、目標エンジン回転速度算出部12は基準目標エンジン回転速度N1と最良燃費エンジン回転速度N3との間のエンジン回転速度N2を最終目標エンジン回転速度N2として設定したり、最終目標エンジン回転速度を基準目標エンジン回転速度N1から最良燃費エンジン回転速度N3に向けて徐々に変化させる。また、目標エンジン回転速度算出部12は、基準目標エンジン回転速度N1から所定の回転速度を減算し、その減算結果を最終目標エンジン回転速度としてもよい。目標変速比算出部13は、最終目標エンジン回転速度に基づいてCVT5の目標変速比を算出し、制御装置10は実際の変速比が目標変速比に一致するようにCVTアクチュエータ25を駆動する。
上述したように、図8(a)で示す運転ポイントP1のエンジン回転速度は基準目標エンジン回転速度N1である。また、運転ポイントP1のスロットル開度Th1はアクセル操作量をスロットルバルブの角度に換算した値である。制御装置10は、回転速度補正を行う一方で駆動力補正を行わない場合、最終目標エンジン回転速度N2でエンジン4を駆動しながら運転ポイントP1でのエンジン出力(線L3で示される出力)が得られるように目標スロットル開度を設定する。したがって、この場合、運転ポイントP2のスロットル開度Th2が目標スロットル開度として設定される。運転ポイントP2は、運転ポイントP1と等しいエンジン出力を得ることができ、且つエンジン回転速度が最終目標エンジン回転速度N2となる運転ポイントである。制御装置10は、実際のスロットル開度が目標スロットル開度に一致するようにスロットルアクチュエータ23を駆動する。
制御装置10は、目標スロットル開度を算出するために次のような処理を行う。目標駆動力算出部15は、基準目標エンジン回転速度N1とアクセル操作量(具体的にはアクセル操作量から換算されたスロットル開度Th1)とに基づいて運転ポイントP1での車両の駆動力を算出し、当該駆動力を基準目標駆動力とする。目標スロットル開度算出部16は、最終目標エンジン回転速度N2でエンジン4を駆動しながら基準目標駆動力に対応する駆動力が得られるように、最終目標エンジン回転速度N2と基準目標駆動力とに基づいて目標スロットル開度Th2を算出する。ここで、基準目標駆動力とは、上述の目標駆動力(例えば、後輪8のトルクについての目標値や、後輪8の出力(後輪8のトルク×後輪8の回転速度)についての目標値)の元となる目標値である。すなわち、後述する駆動力についての補正処理が行われる場合には、基準目標駆動力を補正した値が目標駆動力であり、そのような補正処理が行われない場合には、その基準目標駆動力が目標駆動力とされる。後輪8のトルクや後輪8の出力はエンジン出力に比例する。そのため、図8(a)に示すように、運転ポイントP1での後輪8のトルクや後輪8の出力を目標値とすることで、運転ポイントP1でのエンジン出力を維持しながらエンジン回転速度を変えることができる。
目標エンジン回転速度算出部12は、回転速度補正を行わない場合、基準目標エンジン回転速度N1を最終目標エンジン回転速度とする。制御装置10は、回転速度補正を行わず、駆動力補正を行う場合、最終目標エンジン回転速度N1でエンジン4を駆動しながら運転ポイントP1でのエンジン出力よりも高いエンジン出力又は低いエンジン出力が得られるように、目標スロットル開度を設定する。例えば、図8(b)で示すように、制御装置10は、最終目標エンジン回転速度N1でエンジン4を駆動しながら線L3で示すエンジン出力よりも高い線L4で示されるエンジン出力が得られるように、運転ポイントP4でのスロットル開度Th4を目標スロットル開度とする。運転ポイントP4は、エンジン回転速度がN1である線L4上の運転ポイントである。
制御装置10は、駆動力補正を行う場合には、目標スロットル開度を算出するために次のような処理を行う。目標駆動力算出部15は、基準目標エンジン回転速度N1とアクセル操作量(具体的にはアクセル操作量から換算されたスロットル開度Th1)とに基づいて運転ポイントP1での車両の駆動力を算出し、当該駆動力を基準目標駆動力とする。その後、目標駆動力算出部15は算出した基準目標駆動力を補正し、補正後の駆動力を目標駆動力とする。目標スロットル開度算出部16は、目標エンジン回転速度N1(回転速度補正を行わない場合、基準目標エンジン回転速度に等しい)でエンジン4を駆動しながら目標駆動力に対応する駆動力が得られるように、目標エンジン回転速度N1と目標駆動力とに基づいて目標スロットル開度Th4を算出する。
回転速度補正と駆動力補正は、予め定めた条件が満たされた場合に実行される。例えば、これら2つの補正の選択を可能とする操作部材が設けられた自動二輪車では、運転者はその操作部材を通して2つの補正のうち一方又は双方を選択する。制御装置10は、操作に応じた補正を実行する。また、車両が登坂を走行していると検知された場合に、目標駆動力算出部15は駆動力補正を実行してもよい。また、車両の定常走行が一定時間以上継続した場合に、目標エンジン回転速度算出部12は回転速度補正を実行してもよい。
なお、制御装置10は回転速度補正と駆動力補正の双方を同時に行うことができる。この場合、目標エンジン回転速度算出部12は、基準目標エンジン回転速度N1でエンジン4を駆動するよりも燃費が良くなるように最終目標エンジン回転速度を設定し、目標スロットル開度算出部16は最終目標エンジン回転速度でエンジン4を駆動しながら運転ポイントP1でのエンジン出力よりも高い又は低いエンジン出力が得られるように目標スロットル開度を設定する。例えば、制御装置10は、線L4で示すエンジン出力を得ようとする場合、目標エンジン回転速度算出部12は線L4で示すエンジン出力の最良燃費エンジン回転速度N5と基準目標エンジン回転速度N1との間で最終目標エンジン回転速度N6を設定する。そして、目標スロットル開度算出部16は最終目標エンジン回転速度N6でエンジン4を駆動しながら線L4で示すエンジン出力が得られるように、運転ポイントP6でのスロットル開度Th6を目標スロットル開度とする。最良燃費エンジン回転速度N5は、線L4と最良燃費曲線Aとの交点である運転ポイントP5でのエンジン回転速度である。また、運転ポイントP6は、エンジン回転速度がN6である線L4上の運転ポイントである。
回転速度補正と駆動力補正の双方を行わない場合、目標エンジン回転速度算出部12は基準目標エンジン回転速度N1を最終目標エンジン回転速度とし、目標スロットル開度算出部16は運転ポイントP1でのエンジン出力が得られるように目標スロットル開度を設定する。したがって、この場合、運転ポイントP1でスロットル開度Th1が目標スロットル開度とされる。
以下、目標エンジン回転速度算出部12と目標駆動力算出部15と目標スロットル開度算出部16の処理について詳説する。
目標エンジン回転速度算出部12は図3に示すように補正部12Bを含んでいる。補正部12Bは基準目標エンジン回転速度に基づいて最終目標エンジン回転速度を算出する。具体的には、図8を参照して説明したように、補正部12Bは回転速度補正を実行しない場合には、基準目標エンジン回転速度を最終目標エンジン回転速度とする。一方、回転速度補正を実行する場合には、補正部12Bは基準目標エンジン回転速度でエンジンを駆動するよりも燃費を向上できるように、基準目標エンジン回転速度を最良燃費エンジン回転速度を利用して補正し、その補正の結果を最終目標エンジン回転速度とする。
回転速度補正には種々の形態がある。例えば、補正部12Bは最終目標エンジン回転速度を基準目標エンジン回転速度から最良燃費エンジン回転速度に徐々に近づける。例えば、最終目標エンジン回転速度と基準目標エンジン回転速度との差を補正量ΔNとした場合(最終目標エンジン回転速度=基準目標エンジン回転速度+補正量ΔN)、最終目標エンジン回転速度が徐々に最良燃費エンジン回転速度に近づくように補正量を緩やかに変化させる。
補正量の緩やかな変化は、例えば、前回の処理で算出された補正量に予め定めた値を加算又は減算するという処理を繰り返し実行することで可能となる。他の例では、補正部12Bは、基準目標エンジン回転速度と最良燃費エンジン回転速度との差を時間で積分し、その積分値に基づいて補正量を算出してもよい。さらに他の例では、補正量の算出に、時定数の大きな伝達関数で表されるフィルタが利用されてもよい。この場合でも、補正量の緩やかな変化が実現され得る。このように、補正量を緩やかに変化させることにより、例えばアクセル操作量の変化に起因して基準目標エンジン回転速度が変化した場合でも、補正量の変化は小さいので、基準目標エンジン回転速度の変化に応じた量だけ最終目標エンジン回転速度も変化する。
目標変速比算出部13は、実際のエンジン回転速度が最終目標エンジン回転速度になるように目標変速比を算出する。すなわち、目標変速比算出部13は、最終目標エンジン回転速度とCVT5より下流側の機構の回転速度とに基づいて目標変速比を算出する。この例の目標変速比算出部13は、最終目標エンジン回転速度と、センサによって検知した車速とに基づいて目標変速比を算出する。例えば、目標変速比算出部13は、最終目標エンジン回転速度を車速で除した値と、最終減速機構7の減速比とに基づいて目標変速比を算出する。このようにして算出された変速比が、CVT5の変速比の上限又は下限を越える場合には、目標変速比算出部13はその上限または下限を目標変速比とする。
上述したように、制御装置10は基準スロットル開度算出部14と目標駆動力算出部15とを有している(図3参照)。基準スロットル開度算出部14は、センサによって検知したアクセル操作量を、記憶装置10cに予め格納されたマップや関係式を利用して、スロットル開度(スロットルバルブの角度)に換算し、その結果を基準スロットル開度とする。
目標駆動力算出部15は、アクセル操作量(より具体的には基準スロットル開度)に基づいて車両の駆動力に関する目標値、すなわち上述の目標駆動力を算出する。ここで説明する例において、目標駆動力は、例えば、後輪8のトルクや、後輪8の出力(トルク×後輪8の回転速度)である。図3に示すように、目標駆動力算出部15は、基準目標駆動力算出部15Aと、補正部15Bとを含んでいる。
基準目標駆動力算出部15Aは基準スロットル開度と上述の基礎情報で得られたエンジン回転速度とに基づいて基準目標駆動力を算出する。基準目標駆動力は、後述する補正部15Bに入力される目標値である。基準目標駆動力算出部15Aは例えば、基準スロットル開度と、第1基礎情報及び第2基礎情報とを参照して得られた基準目標エンジン回転速度とに基づいて、基準目標駆動力を算出する。この処理は、例えば次のように実行される。
一例では、エンジン回転速度とスロットル開度とエンジントルクとを対応づけるエンジントルクマップが予め記憶装置10cに格納される。基準目標駆動力算出部15Aはこのエンジントルクマップから、基準目標エンジン回転速度と基準スロットル開度とに対応するエンジントルクを算出する(このエンジントルクを基準目標エンジントルクと称する)。他の例では、基準目標駆動力算出部15Aは、エンジントルクマップに替えて、エンジン回転速度とスロットル開度とエンジン出力とを対応づけるマップを利用し、このマップから基準目標エンジン回転速度と基準スロットル開度とに対応するエンジン出力を算出してもよい(このエンジン出力を基準目標エンジン出力と称する)。
基準目標駆動力算出部15Aは、算出した基準目標エンジントルク又は基準目標エンジン出力を後輪8のトルク又は後輪8の出力に換算し、その結果を基準目標駆動力とする。例えば、後輪8のトルクについての目標値を目標駆動力とする場合、基準目標駆動力算出部15Aは、基準目標エンジン回転速度の変化速度に基づいてエンジン4の慣性トルクを算出する。そして、この慣性トルクを基準エンジントルクから差し引き(基準エンジントルク-慣性トルク)、その減算の結果を基準目標駆動力とする。また、後輪8の出力についての目標値を目標駆動力とする場合、基準目標駆動力算出部15Aは、慣性トルクに起因する出力の変化量を基準エンジン出力から差し引き(基準エンジン出力-慣性トルクに起因する出力の変化量)、その減算の結果を基準目標駆動力とする。なお、慣性トルク又は慣性トルクに起因する出力の変化量の減算は必ずしも行われなくてもよい。
さらに、基準目標駆動力算出部15Aは、エンジン4のトルクが後輪8に伝達される過程でCVT5で失うトルク又はそのトルクに起因する出力の損失を差し引いてもよい。そして、その減算の結果を基準目標駆動力としてもよい。なお、CVT5で失うトルクは、例えばベルトを回転させるために失うトルクに起因し、CVT5の出力軸の回転速度及びエンジントルクに基づいて算出され得る。
基準目標駆動力の算出は、以上説明したものに限られない。例えば、基準目標駆動力は、基準目標エンジン回転速度に替えて、第1基礎エンジン回転速度又は第2基礎エンジン回転速度に基づいて算出されてもよい。例えば、基準目標駆動力算出部15Aは、エンジントルクマップを参照し、第1基礎エンジン回転速度と基準スロットル開度とに対応するエンジントルクを基準エンジントルクとして算出し、当該基準エンジントルクから基準目標駆動力を算出してもよい。
補正部15Bは、駆動力補正を実行しない場合、基準目標駆動力を目標駆動力とする。一方、駆動力補正を実行する場合、補正部15Bは、基準目標駆動力を補正した値を目標駆動力とする。具体的には、補正部15Bは、基準目標駆動力に補正値を加算及び/又は乗算し、その演算結果を目標駆動力とする。
補正の一例では、補正部15Bは、車両が登坂を走行する場合に車両に作用する走行負荷を算出し、その走行負荷に応じた補正値を基準目標駆動力に加算又は乗算する。走行負荷は、運転意図取得部17の処理に関連して説明したように、例えば、エンジン回転速度とスロットル開度とに基づいて算出されるエンジントルクと、エンジン回転速度の変化速度と、車速とに基づいて算出され得る。
補正の他の例では、補正部15Bは、基準目標駆動力が上昇する場合、すなわち車両が加速しようとする場合に、基準目標駆動力よりも目標駆動力を大きくしたり、基準目標駆動力の上昇速度よりも目標駆動力の上昇速度を緩やかにする。また、補正部15Bは、基準目標駆動力が上昇しその後に下がる場合に、基準目標駆動力の下降速度よりも目標駆動力の下降速度を緩やかにしてもよい。このような目標駆動力の変化は、例えば、比例要素や一次遅れ要素を含む伝達関数で表されるフィルタを基準目標駆動力に対して利用することで実現できる。このような補正を行うことにより、車両の加速感を向上できる。
目標スロットル開度算出部16は最終目標エンジン回転速度でエンジン4を駆動しながら車両の駆動力が目標駆動力となるように、目標駆動力と最終目標エンジン回転速度とに基づいて目標スロットル開度を算出する。図3に示す例の目標スロットル開度算出部16は目標エンジントルク算出部16Aと、スロットル開度算出部16Bとを含んでいる。目標エンジントルク算出部16Aは最終目標エンジン回転速度を利用して、後輪8のトルクや出力についての目標値である目標駆動力を、目標とするエンジントルク(すなわち、目標エンジントルク)に換算する。スロットル開度算出部16Bは、目標エンジントルクと最終目標エンジン回転速度とに基づいて目標スロットル開度を算出する。
目標エンジントルク算出部16Aは、例えば、最終目標エンジン回転速度の変化速度に基づいてエンジン4の慣性トルクを算出し、この慣性トルクと、CVT5で失うトルクと、最終目標エンジン回転速度とに基づいて、目標駆動力を目標エンジントルクに換算する。具体的には、目標駆動力が後輪8のトルクについての目標値である場合、目標エンジントルク算出部16Aは、基準目標駆動力算出部15Aとは反対に、慣性トルクとCVT5で失うトルクとを目標駆動力に加え、その結果を目標エンジントルクとする。目標駆動力が後輪8の出力についての目標値である場合、目標エンジントルク算出部16Aは、基準目標駆動力算出部15Aとは反対に、例えば慣性トルクに起因する出力の変化量とCVT5で失うトルクに起因する出力の損失とを目標駆動力に加え、その加算の結果(目標となるエンジン出力)と最終目標エンジン回転速度とに基づいて目標エンジントルクを算出する。
スロットル開度算出部16Bは目標エンジントルクに基づいて目標スロットル開度を算出する。具体的には、スロットル開度算出部16Bは、エンジントルクとスロットル開度とエンジン回転速度とを対応づけるマップを参照し、目標エンジントルクと最終目標エンジン回転速度とに対応するスロットル開度を算出し、このスロットル開度を目標スロットル開度とする。
目標スロットル開度算出部16の処理は、以上説明したものに限られない。例えば、目標スロットル開度算出部16は、目標駆動力に基づいて目標とするエンジン出力を算出し、スロットル開度算出部16Bは、目標エンジン出力に基づいて、目標スロットル開度を算出してもよい。この場合、記憶装置10cには、エンジン出力とスロットル開度とエンジン回転速度とを対応づけるマップが格納される。そして、スロットル開度算出部16Bは、このマップを参照し、目標エンジン出力と目標エンジン回転速度とに基づいて、目標スロットル開度を算出する。
上述したように、目標エンジン回転速度算出部12は、回転速度補正を行う場合、最良燃費エンジン回転速度を算出し、最良燃費エンジン回転速度と基準目標エンジン回転速度とに基づいて最終目標エンジン回転速度を設定している。回転速度補正を行う場合、最良燃費エンジン回転速度の算出は、例えば、目標駆動力算出部15が算出した目標駆動力を利用して行われる。例えば、後輪8の出力と最良燃費エンジン回転速度との関係(すなわち最良燃費曲線を規定するマップ)が記憶装置10cに格納される。目標駆動力が後輪8の出力についての目標値である場合には、目標エンジン回転速度算出部12は、このマップを参照し、目標駆動力算出部15が算出した目標駆動力に対応する最良燃費エンジン回転速度を算出する。また、目標駆動力が後輪8のトルクについての目標値である場合には、目標エンジン回転速度算出部12は、例えば、目標駆動力に後輪8の回転速度を乗じ、最良燃費曲線を規定するマップにおいてその乗算結果に対応する最良燃費エンジン回転速度を算出する。
以上説明した制御装置10では、第1基礎エンジン回転速度算出部12aは、第1の運転モード(例えば、上述の低燃費モード)でのエンジン回転速度を規定する第1の基礎情報から第1のエンジン回転速度を算出している。第2基礎エンジン回転速度算出部12bは、第2の運転モード(例えば、上述の加速応答性モード)でのエンジン回転速度を規定する第2の基礎情報から第2のエンジン回転速度を算出している。運転意図取得部17は運転者の運転意図を表す数値である運転意図値を取得し、目標エンジン回転速度算出部12は、第1のエンジン回転速度と第2のエンジン回転速度との間で算出され且つ運転意図値に応じたエンジン回転速度(以上の説明では、基準目標エンジン回転速度)に基づいて、目標エンジン回転速度(以上の説明では、最終目標エンジン回転速度)を算出している。目標変速比算出部13は、最終目標エンジン回転速度に基づいてCVT5の目標変速比を算出し、スロットル開度算出部16Bは、センサーによって検知したアクセル操作量に基づいて算出された目標駆動力と最終目標エンジン回転速度とに基づいて目標スロットル開度を算出している。
制御装置10によれば、従来の制御とは反対に、最初に目標エンジン回転速度が算出され、その後に駆動力に関する目標値が算出される。そのため、車両の駆動力に関する目標値が目標エンジン回転速度の設定に影響することを抑えることができる。その結果、快適な乗車感を得ることができるようにエンジン回転速度を制御することが容易となる。また、目標エンジン回転速度の算出に運転意図値を利用するので、運転者の運転意図に適合したエンジン回転速度を実現できる。例えば、第2の基礎情報で規定されるエンジン回転速度は、上述したように、第1の基礎情報で規定されるエンジン回転速度よりも良好な加速応答性を実現できる回転速度である。このような例において、運転者が加速応答性の良い走行を望んでいる場合には、目標エンジン回転速度(具体的には、基準目標エンジン回転速度)を第2の基礎情報から得られる第2のエンジン回転速度に近い回転速度に設定することが可能となる。
なお、本発明は以上説明した制御装置10に限られず、種々の変更が可能である。
例えば、制御装置10では、車両が旋回している状況では運転意図値の変化が制限されている。しかしながら、運転意図値の変化の制限は必ずしも実行されなくてもよい。
また、制御装置10は、回転速度補正と駆動力補正の双方を行うことが可能であった。しかしながら、制御装置10は、回転速度補正と駆動力補正の一方のみが可能であってもよい。また、制御装置10は、このような回転速度補正と駆動力補正の双方を行えなくてもよい。すなわち、目標駆動力算出部15は必ずしも補正部15Bを含んでいなくてもよい。また、目標エンジン回転速度算出部12は必ずしも補正部12Bを含んでいなくてもよい。
また、以上の説明では、目標駆動力と基準目標駆動力は、目標とする後輪8の出力又は後輪8のトルクであった。しかしながら、これらは、目標とするエンジン出力であってもよいし、車両の加速度でもよい。
また、以上の説明では、補正部12Bが出力する目標エンジン回転速度を最終目標エンジン回転速度と称していたが、最終目標エンジン回転速度がさらに補正され、その補正後の目標エンジン回転速度に基づいて、目標変速比等が算出されてもよい。
Claims (8)
- 無段変速機の変速比とスロットル開度とをアクチュエータを利用して電子制御する車両の制御装置であって、
車両の第1の運転モードでのエンジン回転速度を規定する第1の基礎情報と、車両の第2の運転モードでのエンジン回転速度を規定する第2の基礎情報とが予め格納された記憶装置と、
前記第1の基礎情報から得られるエンジン回転速度を第1のエンジン回転速度として算出する第1の基礎エンジン回転速度算出部と、
前記第2の基礎情報から得られるエンジン回転速度を第2のエンジン回転速度として算出する第2の基礎エンジン回転速度算出部と、
運転者の運転意図を表す数値である運転意図値を取得する運転意図取得部と、
前記第1のエンジン回転速度と前記第2のエンジン回転速度との間で算出され且つ前記運転意図値に応じたエンジン回転速度に基づいて、目標エンジン回転速度を算出する目標エンジン回転速度算出部と、
前記目標エンジン回転速度に基づいて前記無段変速機の目標変速比を算出する目標変速比算出部と、
センサーによって検知されたアクセル操作量と前記目標エンジン回転速度とに基づいて、車両の駆動力に関する目標値を算出する目標駆動力算出部と、
前記目標値に対応する駆動力が得られるように前記目標値と前記目標エンジン回転速度とに基づいて目標スロットル開度を算出する目標スロットル開度算出部と、
を備えることを特徴とする制御装置。 - 請求項1に記載の制御装置において、
前記運転意図取得部は、車両の運転状態に基づいて前記運転意図値を算出する、
ことを特徴とする制御装置。 - 請求項1又は2に記載の制御装置において、
前記目標エンジン回転速度算出部は、前記運転意図値に応じた前記エンジン回転速度を補正し、その補正後のエンジン回転速度を前記目標エンジン回転速度として算出する、
ことを特徴とする制御装置。 - 請求項1に記載の制御装置において、
前記第1の基礎情報はアクセル操作量と第1の運転モードにおけるエンジン回転速度とを対応付けており、
前記第2の基礎情報はアクセル操作量と第2の運転モードにおけるエンジン回転速度とを対応付けており、
前記第1の基礎エンジン回転速度算出部は前記第1の基礎情報を参照し、前記センサーによって検知したアクセル操作量に基づいて前記第1のエンジン回転速度を算出し、
前記第2の基礎エンジン回転速度算出部は前記第2の基礎情報を参照し、前記センサーによって検知したアクセル操作量から前記第2のエンジン回転速度を算出する、
ことを特徴とする制御装置。 - 請求項1乃至4のいずれかに記載の制御装置において、
前記運転意図取得部は、車両が予め定める走行状況にある場合に、前記運転意図値の変化を制限する、
ことを特徴とする制御装置。 - 請求項5に記載の制御装置において、
前記予め定める走行状況は運転者による加速要求が増すと推定される走行状況であり、
前記運転意図取得部は、運転者による加速要求が増すと推定される走行状況では、前記運転意図値に応じた前記エンジン回転速度が下がる方向への変化が抑えられるように前記運転意図値の変化を制限する、
ことを特徴とする制御装置。 - 請求項5又は6に記載の制御装置において、
前記予め定める走行状況は、車両がカーブを走行している場合、ブレーキ装置が作動している場合、又は車両が登坂を走行している場合である、
ことを特徴とする制御装置。 - 請求項1乃至7のいずれかに記載の制御装置を備える自動二輪車。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015505535A JP6082804B2 (ja) | 2013-03-12 | 2014-03-12 | 車両の制御装置、及びそれを備える自動二輪車 |
| EP14763448.9A EP2974929B1 (en) | 2013-03-12 | 2014-03-12 | Vehicle control device and motorcycle equipped with same |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013049636 | 2013-03-12 | ||
| JP2013-049636 | 2013-03-12 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2014142210A1 true WO2014142210A1 (ja) | 2014-09-18 |
Family
ID=51536861
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2014/056583 WO2014142210A1 (ja) | 2013-03-12 | 2014-03-12 | 車両の制御装置、及びそれを備える自動二輪車 |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP2974929B1 (ja) |
| JP (1) | JP6082804B2 (ja) |
| WO (1) | WO2014142210A1 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000356146A (ja) * | 1999-06-11 | 2000-12-26 | Nissan Motor Co Ltd | 車両用パワートレーンの変速制御装置 |
| JP2005001485A (ja) * | 2003-06-11 | 2005-01-06 | Nissan Motor Co Ltd | 車両の駆動力制御装置 |
| JP2005508788A (ja) * | 2001-11-10 | 2005-04-07 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 連続的に調整可能なトランスミッションを有する車両において機関トルクとトランスミッション変速比とを設定するシステムおよび方法 |
| JP3754188B2 (ja) | 1997-09-08 | 2006-03-08 | 日産自動車株式会社 | 車両の駆動力制御装置 |
| WO2012017709A1 (ja) * | 2010-08-04 | 2012-02-09 | ヤマハ発動機株式会社 | 車両及び車両の駆動制御装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2898034B2 (ja) * | 1989-12-29 | 1999-05-31 | アイシン・エィ・ダブリュ株式会社 | 無段変速機の制御装置 |
| DE69309626T2 (de) * | 1992-12-17 | 1997-07-24 | Honda Motor Co Ltd | Verfahren und Vorrichtung zur Steuerung des Übersetzungsverhältnisses eines stufenlosen Getriebes |
| CN102753413B (zh) * | 2009-08-18 | 2015-06-17 | 丰田自动车株式会社 | 用于车辆的控制装置 |
| JP5510227B2 (ja) * | 2010-09-15 | 2014-06-04 | トヨタ自動車株式会社 | 車両制御装置 |
-
2014
- 2014-03-12 EP EP14763448.9A patent/EP2974929B1/en active Active
- 2014-03-12 WO PCT/JP2014/056583 patent/WO2014142210A1/ja active Application Filing
- 2014-03-12 JP JP2015505535A patent/JP6082804B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3754188B2 (ja) | 1997-09-08 | 2006-03-08 | 日産自動車株式会社 | 車両の駆動力制御装置 |
| JP2000356146A (ja) * | 1999-06-11 | 2000-12-26 | Nissan Motor Co Ltd | 車両用パワートレーンの変速制御装置 |
| JP2005508788A (ja) * | 2001-11-10 | 2005-04-07 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 連続的に調整可能なトランスミッションを有する車両において機関トルクとトランスミッション変速比とを設定するシステムおよび方法 |
| JP2005001485A (ja) * | 2003-06-11 | 2005-01-06 | Nissan Motor Co Ltd | 車両の駆動力制御装置 |
| WO2012017709A1 (ja) * | 2010-08-04 | 2012-02-09 | ヤマハ発動機株式会社 | 車両及び車両の駆動制御装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2974929A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2974929B1 (en) | 2022-05-04 |
| EP2974929A4 (en) | 2017-01-04 |
| JP6082804B2 (ja) | 2017-02-15 |
| JPWO2014142210A1 (ja) | 2017-02-16 |
| EP2974929A1 (en) | 2016-01-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5388303B2 (ja) | 無段変速機の変速制御装置 | |
| RU2503559C2 (ru) | Система управления транспортного средства | |
| WO2013011572A1 (ja) | 車両制御装置 | |
| WO2012067234A1 (ja) | 自動二輪車、及びその制御装置 | |
| WO2013046308A1 (ja) | 車両の駆動力制御装置 | |
| CN101163618A (zh) | 驱动力控制设备和驱动力控制方法 | |
| US20130073157A1 (en) | Enhanced torque model for vehicle having a cvt | |
| JP6082805B2 (ja) | 車両の制御装置、及びそれを備える自動二輪車 | |
| JP5447670B2 (ja) | 車両の左右輪駆動力配分制御装置 | |
| JP6082804B2 (ja) | 車両の制御装置、及びそれを備える自動二輪車 | |
| JP5997362B2 (ja) | 車両の制御装置及び自動二輪車 | |
| JP7545323B2 (ja) | 乗物制御プログラム及び乗物制御装置 | |
| JP5946525B2 (ja) | 車両の制御装置、及びそれを備える自動二輪車 | |
| WO2013172465A1 (ja) | 鞍乗型車両 | |
| EP3121083B1 (en) | Drive power control system and vehicle equipped with drive power control system | |
| JP5816363B2 (ja) | 車両の制御装置、車両の制御方法及び鞍乗型車両 | |
| JP5946524B2 (ja) | 車両の制御装置、及びそれを備える自動二輪車 | |
| JP2013252754A (ja) | 車両の駆動力制御装置 | |
| JP5953369B2 (ja) | 鞍乗型車両及び鞍乗型車両の制御方法 | |
| JP2017115935A (ja) | 車両の変速制御装置 | |
| JP5685429B2 (ja) | 全輪駆動車の駆動力配分制御装置 | |
| JP4424195B2 (ja) | 車両の制御装置 | |
| JP2011037363A (ja) | 車両の駆動力制御装置 | |
| JP2022053052A (ja) | 自動二輪車 | |
| WO2013172459A1 (ja) | 車両の制御装置、車両の制御方法及び鞍乗型車両 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 14763448 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2015505535 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2014763448 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |