WO2014027699A1 - 消費電力量推定装置 - Google Patents
消費電力量推定装置 Download PDFInfo
- Publication number
- WO2014027699A1 WO2014027699A1 PCT/JP2013/072114 JP2013072114W WO2014027699A1 WO 2014027699 A1 WO2014027699 A1 WO 2014027699A1 JP 2013072114 W JP2013072114 W JP 2013072114W WO 2014027699 A1 WO2014027699 A1 WO 2014027699A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- power consumption
- information
- road
- vehicle
- electric vehicle
- Prior art date
Links
Images

















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
- B60L3/12—Recording operating variables ; Monitoring of operating variables
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B60L15/2045—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed for optimising the use of energy
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R16/00—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for
- B60R16/02—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements
- B60R16/023—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements for transmission of signals between vehicle parts or subsystems
- B60R16/0231—Circuits relating to the driving or the functioning of the vehicle
- B60R16/0236—Circuits relating to the driving or the functioning of the vehicle for economical driving
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/80—Technologies aiming to reduce greenhouse gasses emissions common to all road transportation technologies
- Y02T10/84—Data processing systems or methods, management, administration
Definitions
- Embodiments of the present invention relate to a power consumption estimation device that estimates a running power consumption of an electric vehicle.
- EV electric vehicles
- EV is not necessarily limited to four-wheeled vehicles, but also includes two-wheeled vehicles and three-wheeled vehicles.
- Possible plug-in hybrid vehicles also applicable to Plug-in Hybrid Vehicle
- EV does not use fossil fuel and does not emit exhaust gas such as carbon dioxide. Therefore, EV is expected as one of the trump cards for energy saving and global warming countermeasures.
- the use of EV as a storage battery that supplies power to homes and important facilities in the event of a power failure due to a disaster or the like is also being studied. Therefore, EV is attracting attention as a new social infrastructure.
- EV uses the power stored in the storage battery to run. For this reason, EV users need to charge EVs instead of refueling conventional gasoline vehicles. However, the time required for charging the current EV is longer than the time required for refueling a gasoline vehicle. Moreover, the distance that can be traveled by one charge is shorter than the distance that can be traveled by one refueling of a gasoline vehicle.
- the operation plan includes the remaining electricity for the batteries installed in EVs. It is necessary to take into consideration the planned travel distance of EV, which depends on the amount, the time required for charging, the fluctuation of the amount of power supply used for charging, and the like. Therefore, there is a demand for a technique for accurately estimating the distance that can be traveled by the remaining amount of the storage battery mounted on the EV, the amount of charge necessary to reach the destination, and the like.
- the automobile manufacturer provides the driver with an estimated value of the travelable distance based on the remaining battery level.
- a travelable distance estimation system that is a technique for determining parameters of a power consumption model from an EV travel history. This technique is a technique for improving the estimation accuracy of the power consumption amount by adjusting the parameters of the power consumption model of the EV alone based on the traveling history of the individual EV.
- a navigation device and a destination reachability determination method as a technique for estimating a travelable distance based on some information.
- the device for estimating the travelable distance itself is installed in the EV vehicle.
- not only information in the EV itself but also information outside the EV is captured, and a travelable distance is estimated based on the captured information.
- power consumption represents the amount of power consumed by the EV, and is used in the expression “estimation of power consumption”.
- Power consumption represents a phenomenon in which EV consumes power, and is used in the expression “power consumption model”.
- the first problem is that there is no mechanism that allows other operators such as highway operators and EV service providers to use EV power consumption amounts and estimated travel distances by automobile manufacturers.
- the second problem is that the definition and accuracy of estimated values of automobile manufacturers vary among manufacturers.
- the third problem is that the driver cannot effectively acquire and use knowledge about external factors that affect the power consumption of the EV.
- Each automobile manufacturer for only its own EV, notifies the driver of the estimated travelable distance based on the remaining amount of electricity in the storage battery for the driver of the EV.
- the estimated value is notified to the driver via a user interface such as a driver's console or a car navigation device.
- each automobile manufacturer does not disclose the estimated distance that can be traveled as a form accessible to other operators such as expressway operators and EV service providers from a computer system. Therefore, for example, even if an expressway operator wants to grasp the power consumption and the mileage of EVs traveling on a highway, currently the estimated values of the power consumption and mileage by automakers Cannot be used by expressway operators.
- EV power consumption is influenced not only by the mechanical factors (motor, battery, body shape, etc.) of the EV itself but also by factors outside the EV.
- factors outside the EV for example, weather such as temperature and wind, road shape such as road surface conditions and slopes, traffic conditions such as traffic congestion, drivers-dependent factors (such as sudden start and sudden braking) can be considered. Since these external factors change from moment to moment, data resulting from the external factors may not be incorporated in advance in an estimation device installed in an EV vehicle or an external server connected via a network.
- a method for estimating the electric power consumption of the EV a method of estimating the influence on the electric power consumption due to these external factors based on the past driving history of the EV can be considered.
- the travel range of the past travel history of each EV is limited.
- the conditions of external factors encountered during EV travel are limited. Therefore, it is difficult to deal with unknown external factors.
- An object of the present invention is to provide a power consumption estimation device that can estimate the power consumption and travelable distance, reflecting the influence of external factors.
- the power consumption amount estimation device includes a storage device that stores information that affects power consumption due to running of an electric vehicle, and a plurality of the power consumption trends similar to each other from information stored in the storage device.
- An extraction unit is provided for extracting information on the power consumption of each electric vehicle.
- This power consumption amount estimation device estimates a required power amount for an electric vehicle to travel using information that affects power consumption due to traveling of the electric vehicle as information based on the information extracted by the extraction unit.
- an estimation unit that estimates the amount of electric power required for the electric vehicle to travel based on the parameters for the purpose.
- the figure which shows an example of a traffic information model grouping rule The figure which shows an example of a road model parameter. The figure which shows an example of a vehicle model parameter. The figure which shows an example of a driver model parameter. The figure which shows an example of a traffic information model parameter.
- the flowchart which shows an example of the procedure of the power consumption amount estimation in a power consumption amount estimation part.
- the block diagram which shows an example of the system configuration
- FIG. 1 is a block diagram illustrating a configuration example of an EV travel power consumption estimation device.
- the EV travel power consumption estimation system includes a data shaping unit 11, an analysis data storage unit 12, a knowledge extraction unit 13, a knowledge storage unit 14, and a power consumption estimation unit 15.
- the data shaping unit 11 generates analysis data by referring to history data and fixed data, which are information that affects power consumption due to EV travel.
- the data shaping unit 11 stores the analysis data in the analysis data storage unit 12 as a storage device.
- the history data includes, for example, various EV traveling logs, drivers' behavior logs, weather information logs, traffic information logs, and the like.
- EV traveling log is not limited to traveling logs of specific car manufacturers or specific vehicle types.
- the fixed data include EV catalog information (vehicle weight, air resistance coefficient, etc.) data and map information data.
- the external device 20 is provided with a history data storage unit 20a and a fixed data storage unit 20b. It is assumed that history data related to EV power consumption is stored in the history data storage unit 20a. In addition, it is assumed that fixed data related to EV power consumption is stored in the fixed data storage unit 20b.
- the types and number of historical data and fixed data that can be used for estimation of EV travel power consumption vary.
- the EV travel power consumption can be rephrased as a required power amount for the electric vehicle to travel thereafter.
- the type and number of history data and fixed data are not particularly limited.
- history data other than the various logs described above may be stored in the history data storage unit 20a.
- fixed data other than EV catalog information and map information data may be stored in the fixed data storage unit 20b.
- the knowledge extracting unit 13 functions as an extracting unit that extracts information on power consumption of each of a plurality of EVs having similar power consumption trends from information stored in the analysis data storage unit 12 (storage device).
- the knowledge extraction unit 13 refers to the analysis data stored in the analysis data storage unit 12, extracts knowledge related to EV power consumption from the analysis data storage unit 12, and stores the knowledge in the knowledge storage unit 14. .
- the knowledge extracted here includes model knowledge as a framework for expressing individual knowledge, and parameter knowledge expressing individual specific knowledge according to the model knowledge.
- the knowledge extraction unit 13 extracts grouping rules from the analysis data stored in the analysis data storage unit 12 as model knowledge.
- the grouping rule is a rule for specifying a group having a similar influence on EV travel power consumption.
- the vehicle type when the same vehicle type has the same power consumption tendency, the vehicle type becomes a unit of the group. Even if the model is the same, if the trend of power consumption differs depending on the model year, the vehicle model and model year will be the group unit.
- the knowledge storage unit 14 it is possible to identify parameters for supplementing information that affects power consumption due to EV travel based on the information extracted by the knowledge extraction unit 13.
- the model knowledge extracted from the knowledge extraction unit 13 is stored in the model knowledge storage unit 14 a of the knowledge storage unit 14.
- the parameter knowledge extracted from the knowledge extraction unit 13 is stored in the parameter knowledge storage unit 14b.
- the power consumption amount estimation unit 15 uses other EVs having similar power consumption trends due to traveling. Estimate the amount of power required to travel.
- the power consumption estimation unit 15 uses the knowledge stored in the knowledge storage unit 14 to estimate the power consumption required for EV travel.
- the power consumption estimation unit 15 is used by any external system 30 that uses the power consumption estimation function.
- the external system is not particularly limited.
- FIG. 2 is a block diagram showing a modification of the configuration of the EV traveling power consumption estimation device.
- the EV reflecting power consumption estimating apparatus 10 is further provided with a knowledge reflecting unit 16.
- the knowledge storage unit 14 described above is divided into an extraction knowledge storage unit 14-1 for the knowledge extraction unit 13 and an estimation knowledge storage unit 14-2 for the power consumption amount estimation unit 15. It has been.
- the knowledge reflection unit 16 reflects knowledge from the extraction knowledge storage unit 14-1 to the estimation knowledge storage unit 14-2.
- This knowledge reflection unit 16 may be automated as a system or may be reflected manually.
- FIG. 3 is a flowchart illustrating an example of a knowledge extraction procedure in the knowledge extraction unit 13 of the EV travel power consumption estimation device.
- the knowledge extraction unit 13 divides the data stored in the analysis data storage unit 12. Based on the divided data, the knowledge extraction unit 13 generates a group having a similar power consumption tendency due to EV travel (step S11).
- the knowledge extraction unit 13 may use heuristics (simple and approximate rules, methods, clues, rules of thumb for solving problems) based on human knowledge to perform the division. Good.
- the knowledge extraction unit 13 estimates model parameters for each group generated in S11 (step S12).
- the knowledge extraction unit 13 extracts the grouping rule of this group from the analysis data stored in the analysis data storage unit 12.
- the knowledge extraction unit 13 stores the extracted grouping rules in the model knowledge storage unit 14a.
- the knowledge extraction unit 13 stores the parameter estimated in S12 in the parameter knowledge storage unit 14b (step S15).
- the knowledge extracting unit 13 regenerates the group by subdividing or merging the group based on the estimation error (step S17). . And the knowledge extraction part 13 performs the same procedure as after S12.
- the knowledge extracting unit 13 stores the grouping rule extracted in S15 in the model knowledge storage unit 14a.
- the knowledge extraction unit 13 stores the parameter estimated in S12 in the parameter knowledge storage unit 14b, and stores information having accuracy capable of achieving the estimation error in a predetermined storage area of the knowledge storage unit 14 (step S18). .
- FIG. 4 is a block diagram illustrating an example of a system configuration of the EV travel power consumption estimation device according to the first embodiment.
- the EV traveling power consumption estimation device includes the data shaping unit 11, the analysis data storage unit 12, the knowledge extraction unit 13, the knowledge storage unit 14, and the power consumption estimation unit 15.
- an external device 20 an external system 30 that uses a power consumption estimation function, and a weather information providing system 40 are provided.
- the external device 20 includes a history data storage unit 20a and a fixed data storage unit 20b.
- the history data storage unit 20a stores EV travel log data, traffic information log data, and weather information log data.
- the fixed data storage unit 20b stores EV vehicle information data and road information data.
- the data shaping unit 11 refers to an EV travel log, a traffic information log, and a weather information log as logs stored in the history data storage unit 20a of the external device 20.
- the EV travel log is data collected through, for example, a roadside device on an expressway.
- the traffic information log is, for example, a history of a traffic control station.
- the weather information log is a history of, for example, the Japan Meteorological Agency.
- a method for collecting the history data, a method for accessing the history data, and a data format thereof are not particularly defined.
- the data shaping unit 11 refers to the EV vehicle information data and the road information data as data stored in the fixed data storage unit 20b of the external device 20.
- EV vehicle information data is data that can be obtained from a catalog of an automobile manufacturer.
- the road information data is data that can be obtained from map data. In the present embodiment, these data formats are not particularly defined.
- the data shaped by the data shaping unit 11 is stored in the analysis data storage unit 12.
- the data shaping unit 11 shapes various log data stored in the history data storage unit 20a of the external device 20, and creates driver information and EV travel power consumption information.
- the data shaping unit 11 stores the created various information in the analysis data storage unit 12.
- the traffic information log data stored in the analysis data storage unit 12 uses the traffic information log data stored in the history data storage unit 20a as it is.
- the weather information log data stored in the analysis data storage unit 12 uses the weather information log data stored in the history data storage unit 20a as it is.
- the EV vehicle information stored in the analysis data storage unit 12 uses EV vehicle information as data stored in the fixed data storage unit 20b as it is.
- the road information stored in the analysis data storage unit 12 also uses road information as data stored in the fixed data storage unit 20b as it is.
- the model knowledge storage unit 14a of the knowledge storage unit 14 includes a driver model grouping rule, a vehicle model grouping rule, a road model grouping rule, and a traffic information model grouping rule as grouping rules for a driver model, a vehicle model, a road model, and a traffic information model. Is stored. These are merely examples, and the grouping rules described here are not all the grouping rules handled in this embodiment. For example, when a certain driver can travel on a certain road and the characteristics of the travel can be grouped by a pair of the driver and the road, a travel model grouping rule for expressing the grouping rule of the pair of the driver and the road can be prepared.
- the parameter knowledge storage unit 14b of the knowledge storage unit 14 includes a driver model parameter, a vehicle model parameter, a road model parameter, and a traffic information model parameter as parameters of the driver model, vehicle model, road model, and traffic information model, respectively. Stored. These are merely examples, and the parameters described here are not all parameters handled in the present embodiment. For example, as described above, when driving characteristics can be grouped by a driver and road pair, such as when a driver is driving on a certain road, a driving model parameter for representing the parameter of the driver and road pair is prepared. You can also.
- FIGS. are merely examples, and the data described here is not all data handled in the present embodiment.
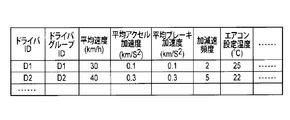
- FIG. 5 is a diagram showing an example of the data structure of the driver information stored in the analysis data storage unit 12 in a table format. Various data constituting the driver information is calculated and shaped by the data shaping unit 11 based on the EV travel log data obtained from the history data storage unit 20a of the external device 20.
- driver information data that affects EV power consumption is calculated and stored by the data shaping unit 11 for each driver.
- This stored data includes (1) a driver ID unique to the driver, (2) an average speed (km / h) of the EV operated by the driver, and (3) an average of the EV when the driver steps on the accelerator pedal of the EV.
- (4) Average brake acceleration (km / s ⁇ 2) as EV deceleration when the driver steps on the EV brake pedal (5) EV by driver Acceleration / deceleration frequency (%), (6) air conditioner set temperature (° C.) in the EV operated by the driver, and the like.
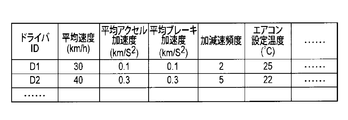
- the acceleration / deceleration frequency is a ratio of the acceleration / deceleration time in the entire EV travel time.
- FIG. 6 is a diagram showing an example of a data structure of EV travel power consumption information stored in the analysis data storage unit 12 in a table format.
- the data constituting the EV running power consumption information is calculated and shaped by the data shaping unit 11 based on the EV running log data obtained from the history data storage unit 20a of the external device 20.
- snapshot data when a certain driver operates an EV at a certain time and passes through a certain road section (route section) is listed.
- a road segment is a road segmented into appropriate segments.
- data that affects EV power consumption is calculated and stored by the data shaping unit 11 for each travel date and time of the EV.
- the stored data includes (1) current date and time, (2) road section ID unique to the road section, (3) EV body ID unique to the EV body, (4) EV model ID unique to the EV model, ( 5) Driver ID, (6) Average speed (km / h) when EV passes a road segment corresponding to road segment ID, (7) EV acceleration / deceleration frequency passing through road segment corresponding to road segment ID (%), (8) Electric power consumption (kWh) required while the EV corresponding to the EV vehicle body ID passes through the road segment corresponding to the road segment ID.
- FIG. 7 is a diagram showing an example of the data structure of the traffic information log stored in the analysis data storage unit 12 in a table format.
- Various data constituting the traffic information log is shaped by the data shaping unit 11 based on the traffic information log data obtained from the history data storage unit 20a of the external device 20.
- the data shaping unit 11 calculates and stores data that affects EV power consumption.
- the stored data includes (1) a traffic information ID unique to the traffic information, (2) a date of traffic information, (3) day of the week, (4) time, and (5) a road segment targeted by the traffic information. ID, (6) Speed limit (km / h) of the road section corresponding to this road section ID, (7) Average speed (km / h) of vehicles passing through the road section corresponding to this road section ID, (8 ) The number of traffic per unit time for the road section corresponding to the road section ID.
- FIG. 8 is a diagram illustrating an example of a data structure of a weather information log stored in the analysis data storage unit 12 in a table format.
- Various data constituting the weather information log is shaped by the data shaping unit 11 based on the weather information log data obtained from the history data storage unit 20a of the external device 20.
- the data shaping unit 11 calculates and stores data that affects EV power consumption.
- This stored data includes (1) weather information log ID unique to weather information, (2) date of weather information, (3) day of the week, (4) time, and (5) location targeted by weather information.
- Information (6) temperature (° C.) at the location indicated by the location information, (7) weather at the location indicated by the location information, and (8) wind power (m / s) at the location indicated by the location information.
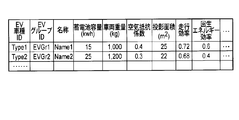
- FIG. 9 is a diagram illustrating an example of a data structure of EV vehicle information stored in the analysis data storage unit 12 in a table format.
- the various data constituting the EV vehicle information is shaped by the data shaping unit 11 based on the EV vehicle information data (catalog information published by the automobile manufacturer) obtained from the history data storage unit 20a of the external device 20. is there.
- the data shaping unit 11 calculates and stores data that affects EV power consumption for each EV vehicle.
- This stored data includes (1) EV model ID specific to the model to which the EV vehicle belongs, (2) EV vehicle name, (3) EV storage battery capacity (kWh), (4) Vehicle weight (kg), (5) Air resistance coefficient, (6) Projected area (m ⁇ 2), (7) Travel efficiency, (8) Regenerative energy efficiency, etc.
- the travel efficiency and regenerative energy efficiency columns in the EV vehicle information shown in FIG. 9 are not available from the catalog information and are blank.
- FIG. 10 is a diagram illustrating an example of a data structure of road information stored in the analysis data storage unit 12 in a table format.
- Various data constituting the road information is shaped by the data shaping unit 11 based on road information data (see map information data) obtained from the history data storage unit 20a of the external device 20.
- the data shaping unit 11 calculates and stores data affecting the EV power consumption for each road segment obtained by dividing the road into appropriate segments.
- the stored data includes (1) a road segment ID unique to the road segment, (2) a start point of the road segment corresponding to the road segment ID, (3) an end point of the road segment corresponding to the road segment ID, (4 ) Length of road section (m), (5) Speed limit (km / h) in road section, (6) Gradient, (7) Road surface rolling resistance coefficient, etc.
- the gradient and road surface rolling resistance coefficient columns in the road information cannot be obtained from the map information data and are blank.
- the knowledge extraction unit 13 generates model knowledge and parameter knowledge according to the knowledge extraction procedure shown in FIG. A procedure for knowledge extraction in this embodiment will be described.
- the knowledge extraction unit 13 divides the EV travel power consumption information data stored in the analysis data storage unit 12 into appropriate groups. And the knowledge extraction part 13 estimates the parameter of each group. If improvement in accuracy of the estimation error is recognized as a result of this estimation, the knowledge extraction unit 13 stores the new grouping rule in the model knowledge storage unit 14a of the knowledge storage unit 14.
- the knowledge extracting unit 13 stores parameters for identifying each group in the parameter knowledge storing unit 14b of the knowledge storing unit 14.
- the knowledge storage unit 14 uses the characteristics of the road segment sequence ( Slope, road rolling resistance coefficient, etc.).
- the knowledge storage unit 14 determines the characteristics (running efficiency, Identify regenerative energy efficiency).
- the knowledge storage unit 14 uses the road and EV in this group division. Identify the characteristics (such as road surface rolling resistance coefficient) due to the interaction.
- the knowledge storage unit 14 obtains the first parameter and the second parameter.
- the first parameter is the power consumption information of each of a plurality of EVs passing through a road segment belonging to a predetermined road segment group as the power consumption information extracted by the knowledge extraction unit 13 (for example, the travel power consumption of the EV)
- This is a parameter for supplementing road information related to road segments belonging to this predetermined road segment group based on (information data).
- the second parameter is a predetermined vehicle group having characteristics related to power consumption (for example, EV travel power consumption information data) as power consumption information extracted by the knowledge extraction unit 13 (described later with reference to FIG. 14). ) Is the power consumption amount information of each of the plurality of EVs belonging to (1).
- the knowledge storage unit 14 identifies both the first and second parameters for the parameters for supplementing the EV vehicle information related to the EVs belonging to the predetermined vehicle group based on the first and second parameters.
- the knowledge storage unit 14 may identify only one of the first and second parameters. The same applies to other parameters described below other than those described above.
- drivers are handled individually without grouping.
- FIG. 12 is a diagram showing a list of grouping rules applied in the present embodiment.
- a rule ID unique to this grouping rule (2) a model ID unique to the model type targeted by the grouping rule, and (3) this model ID
- a rule item indicating a grouping method for the corresponding model is associated.
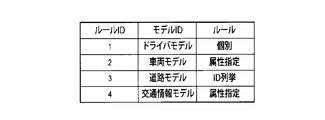
- driver models are grouped individually, vehicle models are grouped by specifying the EV vehicle type attribute, road models are grouped by enumerating road section IDs, and the traffic information model is an attribute of traffic information. Grouped by specification.
- the grouping method is managed by the grouping rule list shown in FIG.
- the grouping rule list in FIG. 12 is not particularly required.
- FIG. 13 is a diagram illustrating an example of a road model grouping rule.
- the road models are grouped by enumerating road section IDs.
- several adjacent road segment sequences are grouped on the assumption that they have the same characteristics that affect EV power consumption, and parameters are identified.
- adjacent road segments R1, R2, and R3 are grouped into groups corresponding to the group ID “1”, and adjacent road segments R4 and R5 are grouped into groups corresponding to the group ID “2”. Is done.
- FIG. 14 is a diagram illustrating an example of a vehicle model grouping rule.
- Vehicle (EV) models are grouped by specifying attributes as described above.
- vehicle models are grouped for each vehicle type corresponding to the EV vehicle type ID.
- grouping may be made not only for the vehicle type but also for the vehicle type and year.
- FIG. 15 is a diagram illustrating an example of a driver model grouping rule. In this embodiment, the drivers are handled individually without grouping the driver models.
- FIG. 16 is a diagram illustrating an example of a traffic information model grouping rule. The traffic information model is grouped by specifying attributes. In the present embodiment, the traffic information model is grouped by day of the week and time zone.
- the data structure (FIGS. 17 to 20) of the parameter knowledge storage unit 14b extracted by the knowledge extraction unit 13 includes the data structure (FIG. 5) of the analysis data storage unit 12 generated by the data shaping unit 11. To FIG. 10) are represented by adding columns.
- the data structure of the parameter knowledge storage unit 14b and the analysis data storage unit 12 may have completely different formats.
- FIG. 17 is a diagram illustrating an example of road model parameters.
- data that affects EV power consumption is associated with each road segment.
- the data affecting the power consumption are (1) road segment ID, (2) road group ID determined based on the road model grouping rule, (3) start point of the road segment corresponding to the road segment ID, (4) road End point of road section corresponding to section ID, (5) Length of road section (m), (6) Speed limit in road section (km / h), (7) Gradient, (8) Road surface rolling resistance coefficient, etc. It is.
- road model parameters are grouped by adjacent road sections.
- the knowledge extraction unit 13 assigns the same road group ID to the row corresponding to the road segment having similar characteristics that affect the EV power consumption as the ID shown in FIG.
- This road model parameter is different from the road information shown in FIG. 10 in that an EV group ID is set.
- a gradient, a road surface rolling resistance coefficient value, and the like are newly estimated as parameter values.
- the first reason why these values are estimated is that historical data indicating the amount of power consumed when a large number of EVs have traveled on road segments belonging to a group corresponding to a certain road group ID is EV travel power consumption information data. It is because it is shown.
- the second reason is that, based on the average speed, acceleration / deceleration speed, power consumption, and the like indicated by the EV travel power consumption information, the knowledge extraction unit 13 determines the characteristics of road segments belonging to the group corresponding to the same road group ID. This is because it can be estimated.
- FIG. 18 is a diagram illustrating an example of vehicle model parameters.
- the vehicle model parameter is associated with data that affects EV power consumption for each EV model.
- This data includes (1) EV model ID, (2) EV group ID determined based on the vehicle model grouping rule, (3) name of EV vehicle belonging to this EV group ID, (4) storage battery capacity (kWh), (5) Vehicle weight (kg), (6) Air resistance coefficient, (7) Projected area (m ⁇ 2), (8) Travel efficiency, (9) Regenerative energy efficiency, etc.
- the vehicle model parameters are grouped according to the EV model, and the knowledge extracting unit 13 assigns the same EV group ID to the row corresponding to the model having similar characteristics that affect the EV power consumption shown in FIG. Is granted.
- the vehicle model parameters differ from the EV vehicle information shown in FIG. 9 in that the EV group ID is set, and new parameters such as travel efficiency and regenerative energy efficiency are newly set. Estimated as a value.
- the first reason why this parameter is estimated is that when a road model parameter value is estimated as shown in FIG. 17, a large number of EVs belonging to the same EV vehicle group travel on road segments belonging to each road group. This is because the history data of the power consumption is shown in the EV travel power consumption information data.
- the second reason is that, based on the average speed, acceleration / deceleration speed, power consumption amount, and the like indicated by this EV travel power consumption information data, EV vehicles belonging to the group corresponding to the same vehicle group ID (in this embodiment, individual vehicles) This is because the knowledge extraction unit 13 can estimate the characteristics of the EV vehicle.
- FIG. 19 is a diagram illustrating an example of driver model parameters.
- the driver model parameter is associated with data that affects EV power consumption for each driver.
- This data includes (1) a driver ID, (2) a driver group ID determined based on a driver model grouping rule, (3) an average speed (km / h) of EVs operated by drivers belonging to this driver group ID, ( 4) Average accelerator acceleration (km / s ⁇ 2), (5) Average brake acceleration (km / s ⁇ 2), (6) Acceleration / deceleration frequency (%), (7) Air conditioner set temperature (° C), and the like.
- the driver model parameters differ from the driver information data shown in FIG. 5 in that a driver group ID is further set.
- driver grouping is not particularly performed, and each characteristic of the driver is handled individually. Therefore, no new knowledge about the driver information is specifically extracted for the driver model.
- the knowledge extraction unit 13 uses the driver information data shown in FIG. 5 as a parameter stored in the analysis data storage unit 12 as a driver model parameter as it is. Accordingly, the driver group ID in the driver model parameter shown in FIG. 19 is the same as the driver ID.
- FIG. 20 is a diagram illustrating an example of a traffic information model parameter.
- the traffic information model parameter is associated with data that affects EV power consumption. This data includes (1) traffic information ID, (2) traffic information group ID determined based on the traffic information model grouping rule, (3) date of traffic information, (4) day of the week, (5) time, ( 6) Road segment ID targeted by the traffic information, (7) Speed limit (km / h) of the road segment corresponding to the road segment ID, (8) Average speed of vehicles passing through the road segment corresponding to the road segment ID (Km / h), (9) The number of traffic per unit time for the road segment corresponding to the road segment ID.
- the traffic information model parameter is different from the traffic information data shown in FIG. 7 in that a traffic information group ID is further set.
- traffic information model parameters are grouped by day of the week and time zone.
- the same traffic information group ID is given to the row corresponding to the traffic information having similar characteristics affecting the EV power consumption shown in FIG.
- the reason for this is that in the present embodiment, there is no particular difference in the traffic state depending on the date in the traffic information, and the knowledge extracting unit 13 is similar that affects the power consumption in the EV based on the day of the week and the time zone indicated by the traffic information. This is because it is possible to identify a traffic state having the above characteristics.
- FIG. 21 is a flowchart illustrating an example of a procedure for power consumption amount estimation in the power consumption amount estimation unit 15.
- the power consumption estimation unit 15 receives information on the power consumption estimation point related to the power consumption estimation from the external system 30 using the power consumption estimation function (step S21). Next, the power consumption estimation unit 15 searches the knowledge storage unit 14 and selects a group that matches the information at the time of power consumption estimation received from the external system 30 (step S22).
- the power consumption estimation unit 15 selects the most subdivided group among the plurality of groups matching in each model. (Step S24).
- the power consumption amount estimation unit 15 specifies parameters as shown in FIGS. 16 to 20 for each group (step S25).
- the power consumption amount estimation unit 15 calculates an estimated value of the power consumption amount of EV using these parameters (step S26).
- the external system 30 can estimate the estimated value of the EV travelable distance based on the estimated value of the power consumption.
- the method for calculating the estimated value of power consumption is not particularly limited in the present embodiment. Further, the method for calculating the estimated value of the power consumption may be any calculation method.
- Running resistance R Ra + Rr + Re + Rc (4)
- Ra Air resistance
- Rr Rolling resistance
- Rc Acceleration resistance
- the air resistance Ra of the equation (4) is expressed by the following equation (5).
- Air resistance Ra 1/2 ⁇ ⁇ ⁇ Cd ⁇ A ⁇ V ⁇ 2 Equation (5)
- ⁇ Air density
- Cd Air resistance coefficient
- A Projection area
- V Speed
- the rolling resistance Rr in the equation (4) is expressed by the following equation (6).
- Rolling resistance Rr ⁇ ⁇ M ⁇ g ⁇ cos ⁇ (6)
- ⁇ Road surface rolling resistance coefficient
- M Total vehicle weight
- g Gravity acceleration
- ⁇ Gradient Gradient resistance Re in Expression (4) is expressed by Expression (7) below.
- the acceleration resistance Rc of the formula (4) is expressed by the following formula (8).
- Acceleration resistance Rc ⁇ ⁇ (M + Mi) (8)
- acceleration Mi partial inertia weight of rotation
- the amount of power consumption is the amount of regenerative energy based on the sum of the amount of power consumed for EV travel (travel power consumption) and the amount of power consumed for other than travel. Is the amount after subtracting.
- the travel power consumption is an amount obtained by multiplying the work efficiency (travel work amount) necessary for travel by travel efficiency.
- the travel work amount is proportional to the resistance (travel resistance) received by the car during travel and the travel distance.
- the running resistance is the sum of air resistance, rolling resistance, gradient resistance, and acceleration resistance.
- the power consumption estimation unit 15 acquires weather information data (see FIG. 8).
- the power consumption estimation unit 15 calculates the relationship between the location indicated by the acquired weather information and the road intercept indicated by the EV travel power consumption information.
- the power consumption amount estimation unit 15 estimates the power consumption amount required for EV travel in consideration of the calculation result.
- the weather information may be provided from the weather information providing system 40 shown in FIG.
- the weather information provision system 40 mentioned above for utilizing for the estimation of the electric energy consumption of EV is arbitrary, and is not particularly limited in the present embodiment. In estimating the electric power consumption of EV, it is not always necessary to acquire weather information using the weather information providing system 40.
- this EV travel power consumption estimation device in the function of estimating the power consumption required for EV travel, new conditions such as driver information, traffic information, vehicle information, and the like are applied. Increase adaptability.
- this EV travel power consumption estimation device groups and analyzes EV travel history data, etc., groups models for estimating power consumption, and consumes power of EVs belonging to the group specified by this grouping. Is estimated. Thereby, this EV driving
- the EV travel power consumption estimation device estimates the power consumption and the travelable distance reflecting the influence of external factors outside the EV vehicle, which is an effect that is difficult to estimate with a single EV alone. it can. Further, this EV travel power consumption estimation device can estimate the power consumption and travelable distance without depending on a specific automobile manufacturer or vehicle type. In addition, the EV travel power consumption estimation device in the present embodiment can estimate power consumption and travelable distance for a plurality of vehicle manufacturers and a plurality of vehicle types without being limited to a specific vehicle manufacturer or a specific vehicle type. .
- FIG. 22 is a block diagram illustrating an example of a system configuration of an EV travel power consumption estimation device according to the second embodiment.
- This system configuration is almost the same as the system configuration of the first embodiment.
- the system configuration of the second embodiment is different from the system configuration of the first embodiment in that a reservation application information log for using EV as a car share or a rental car is further stored in the history data storage unit 20a of the external device 20. It is a point that has been.
- the reservation application information log is stored in the analysis data storage unit 12 as it is.
- FIG. 23 is a diagram showing an example of reservation application information.
- the reservation application information includes information for applying for a car share or reservation by a rental car user.
- a reservation ID and a reservation person ID are set as information for specifying a driver of an EV rental destination.
- the reservation application information includes the date and time when the driver plans to start borrowing, the date and time when borrowing is scheduled to end, and the EV destination that is scheduled to be lent.
- the departure place is determined as fixed information.
- the reservation application information is passed as an argument to the power consumption estimation unit 15. .
- the power consumption amount estimation unit 15 that has received the reservation application information as an argument identifies parameters related to the EV scheduled to be lent out of the parameters stored in the parameter knowledge storage unit 14b in the following procedure.
- the power consumption estimation unit 15 identifies a driver that borrows an EV scheduled to be lent and a group to which the driver belongs based on reservation application information and driver model parameters (see FIG. 19).
- the power consumption amount estimation unit 15 specifies a driver model parameter that depends on a driver that borrows an EV that is scheduled to be lent.
- the driver model parameters are, for example, the average speed, average accelerator acceleration, average brake acceleration, acceleration / deceleration frequency, and the like of the driver.
- the power consumption estimation unit 15 estimates the EV traveling route scheduled to be lent based on the destination described in the reservation application information.
- the power consumption estimation unit 15 estimates the road intercept of the estimated travel route based on the estimated travel route and the road model parameter (see FIG. 17). Thereby, the power consumption amount estimation unit 15 can specify the road model parameters (speed limit, gradient, etc.) on which the EV scheduled to be rented travels.
- Congestion information on the route of the EV scheduled to be rented is generated.
- the power consumption estimation unit 15 uses this traffic jam information to update the road model parameters (such as speed limit) on which the EV scheduled to be rented travels as the parameters specified as described above.
- the power consumption estimation unit 15 uses the parameters of weather information at the time of lending EV based on the borrowing start date and time and the borrowing end date and time described in the reservation application information and the weather forecast information obtained from the weather information providing system.
- the temperature and weather at the time of renting the EV scheduled to be lent are estimated.
- the power consumption amount estimation unit 15 specifies the vehicle model parameter related to the EV scheduled to be lent based on this vehicle type and the vehicle model parameter (see FIG. 18).
- the power consumption amount estimation unit 15 uses the driver model, road model, vehicle model, and weather information parameters related to the EV to be rent specified in the above procedure according to the power consumption amount estimation algorithm shown in FIG. The power consumption of the EV scheduled to be lent is estimated.
- the EV of the EV scheduled to be lent is based on the reservation application information for renting the EV.
- the amount of power consumed during lending can be estimated.
- this reservation application information includes information on the destination of the EV scheduled to be rented
- the EV travel power consumption estimation apparatus in the second embodiment travels EV based on this information and the traffic information model parameter. Traffic congestion information on the route can be generated. Therefore, the accuracy of the road model parameters can be increased as compared with the first embodiment.
- DESCRIPTION OF SYMBOLS 11 Data shaping part, 12 ... Analysis data storage part (memory
Abstract
実施形態によれば、消費電力量推定装置は、電力消費の傾向が類似する複数の電気自動車のそれぞれの消費電力量情報に基づいた、電気自動車の走行による電力消費に影響する情報を補うためのパラメータに基づいて、電力消費の傾向が類似する電気自動車が走行するための必要電力量を推定する推定部(15)をもつ。
Description
本発明の実施形態は、電気自動車の走行消費電力量を推定する消費電力量推定装置に関する。
今後、電気自動車(Electric Vehicle:以下、「EV」と記す。ただし、本願ではEVは必ずしも四輪車には限られず、二輪車・三輪車等も含まれる。また、EVには、外部からの充電が可能なプラグインハイブリッド車(Plug-in Hybrid Vehicle)も該当する)の普及が見込まれる。EVは、化石燃料を用いず二酸化炭素などの排気ガスを排出しない。よって、EVは、省エネルギーと地球温暖化対策の切り札の一つとして期待されている。また、EVについては、災害等による停電時に家庭や重要施設に電力を供給する蓄電池としての用途も検討されている。よって、EVは新しい社会インフラとしても注目されている。
EVは走行するために蓄電池に蓄積した電力を使う。このため、EVのユーザは、従来のガソリン車に対する給油を行なう代わりに、EVへの充電を行なう必要がある。しかし、現在のEVに対する充電に要する時間は、ガソリン車に対して給油するための時間と比べて長い。しかも、一回の充電で走行可能な距離は、ガソリン車に対する一回の給油で走行可能な距離と比較して短くなってしまう。
今後、街中を走るEVが増えると、多くのEVの充電による充電ステーションの混雑や、充電ステーションなどのEV充電施設への電力供給不足や、路上でのEVの電池切れが懸念される。
特に、高速道路では、充電ステーションを設置できる場所はサービスエリアやパーキングエリアなどに限定されるので、充電ステーションを設置できる場所が一般道路より少なくなってしまう。このため、特定の充電ステーションへの集中緩和や、路上での電池切れ防止は重要な課題となる可能性がある。
また、一般道路においても、例えばカーシェアリングやカーレンタルなどの共用車、バスやタクシーなど公共交通機関、宅配便などの商用車などの分野では、運用計画は、EVが搭載する蓄電池の電気の残量に左右されるEVの走行予定距離、充電に要する時間、充電に使う電力供給量の変動などを考慮して立てる必要が生じる。
そのため、EVに搭載する蓄電池の残量で走行可能な距離や、目的地に到着するために必要な充電量などを高精度に推定する技術が望まれている。
そのため、EVに搭載する蓄電池の残量で走行可能な距離や、目的地に到着するために必要な充電量などを高精度に推定する技術が望まれている。
そこで、自社製EVの機能として、または自社製EVのドライバ(運転手)向けサービスとして、自動車メーカーは、蓄電池残量に基づく走行可能距離の推定値をドライバに提供している。
例えば、EVの走行履歴から電力消費モデルのパラメータを定める技術である走行可能距離推定システムがある。この技術は、個別のEVの走行履歴に基づいて、そのEV単体の電力消費モデルのパラメータを調整し、消費電力量の推定精度を向上させる技術である。
例えば、EVの走行履歴から電力消費モデルのパラメータを定める技術である走行可能距離推定システムがある。この技術は、個別のEVの走行履歴に基づいて、そのEV単体の電力消費モデルのパラメータを調整し、消費電力量の推定精度を向上させる技術である。
また、一部の情報に基づいて走行可能距離を推定する技術としてのナビゲーション装置および目的地到達可否判定方法がある。この技術では、走行可能距離を推定する装置自体はEV車内に設置される。ただし、この技術では、EV自身の持つ車内の情報だけでなく、EV外部の情報も取り込み、この取り込んだ情報に基づいて走行可能距離を推定する。
上述したように、今後、充電ステーションの負荷分散やEVの電池切れ防止のために、道路事業者は、路上を走行するEVを運転しているドライバの充電行動を予測する必要が生じる。
また、カーシェアリング、タクシー、宅配車などの商用車の運行管理を行なう場合でも、運行管理者は、EVの走行に必要な充電量や、EVを充電するのに要する充電時間を把握する必要が生じる。
また、カーシェアリング、タクシー、宅配車などの商用車の運行管理を行なう場合でも、運行管理者は、EVの走行に必要な充電量や、EVを充電するのに要する充電時間を把握する必要が生じる。
このようなビジネス用途では、特定の自動車メーカーや特定の車種だけでなく、様々な自動車メーカーの様々な車種のEVが混在している状況で全てのEVを対象として運行や充電を管理しなければならない。しかし、現状の自動車メーカー各社によるEVの消費電力量や走行可能距離の推定には、以下に示す課題がある。
なお、本明細書での説明においては、「消費電力量」という用語と「電力消費」という用語を用いる。「消費電力量」は、EVが消費した電力の量を表し、「消費電力量の推定」という表現などで用いられる。また、「電力消費」はEVが電力を消費する現象を表し、「電力消費モデル」という表現などで用いられる。
第1の課題は、自動車メーカー各社によるEVの消費電力量や走行可能距離の推定値を高速道路事業者やEV向けサービス提供業者などの他事業者が利用できる仕組みが無いことである。
第2の課題は、自動車メーカー各社の推定値の定義や精度はメーカー間でばらつきがあることである。
第3の課題は、EVの電力消費に影響する外部要因に関する知識をドライバが有効に獲得・利用できないことである。
第2の課題は、自動車メーカー各社の推定値の定義や精度はメーカー間でばらつきがあることである。
第3の課題は、EVの電力消費に影響する外部要因に関する知識をドライバが有効に獲得・利用できないことである。
以下で、これら3つの課題について順に説明する。
第1の課題に関して説明する。自動車メーカー各社は、自社製EVのみを対象として、そのEVのドライバ向けに蓄電池の電気の残量に基づく走行可能距離の推定値をドライバに通知する。この推定値は、例えば運転席のコンソールやカーナビゲーション機器などのユーザインタフェースを介してドライバに通知される。
第1の課題に関して説明する。自動車メーカー各社は、自社製EVのみを対象として、そのEVのドライバ向けに蓄電池の電気の残量に基づく走行可能距離の推定値をドライバに通知する。この推定値は、例えば運転席のコンソールやカーナビゲーション機器などのユーザインタフェースを介してドライバに通知される。
しかし、自動車メーカー各社は、コンピュータシステムから高速道路事業者やEV向けサービス提供業者などの他事業者がアクセスできる形態としての、走行可能距離の推定値を公開していない。そのため、例えば高速道路上を走行しているEVの消費電力量や走行可能距離を高速道路事業者が把握したいと考えたとしても、現状では自動車メーカー各社による消費電力量や走行可能距離の推定値を高速道路事業者が使うことはできない。
第2の課題に関して説明する。仮に、自動車メーカー各社がEVの消費電力量や走行可能距離の推定値を他事業者向けに公開したとしても、この推定値は、高速道路事業者など、複数の自動車メーカーのEVを扱う事業者が用いる値としては不十分である。
この理由は、推定値の定義や推定精度が自動車メーカーや車種ごとにばらつきがあるため、同一の尺度で扱うことができないためである。例えば自動車メーカーAの電気自動車のEVモデルA1では、走行可能距離の推定値に20%程度のマージンを見込んでいる可能性がある。なお、このモデルは、EVが推定距離を走行して、推定通りに電力を消費したとしても、蓄電池には20%程度の電荷が余っているように推定値を提示する。
また、例えば自動車メーカーB社のEVモデルB2では、消費電力量の推定値に±10%の誤差が見込まれている可能性がある。また、自動車メーカーC社のEVモデルC3では、消費電力量の推定値に+5%、-30%の誤差が見込まれている可能性がある。
このように推定値の定義や推定精度が定まっていない状況では、たとえ自動車メーカー各社が推定値を事業者に公開したとしても、自動車メーカー各社のEVに跨った運行管理に十分に役立てることができない。
第3の課題に関して説明する。EVの電力消費に対しては、EV自体のメカニカルな要因(モーター、バッテリー、ボディ形状など)だけでなく、EV外部の要因も影響する。
外部要因としては、例えば、気温や風などの天候、路面状態や勾配などの道路の形状、渋滞などの交通状況、ドライバに依存する要因(急発進や急ブレーキなど)などが考えられる。これらの外部要因は刻々と変化するため、外部要因に起因するデータをEV車内またはネットワークで接続された外部サーバに設置される推定装置にあらかじめ組み込んでおけるとは限らない。
外部要因としては、例えば、気温や風などの天候、路面状態や勾配などの道路の形状、渋滞などの交通状況、ドライバに依存する要因(急発進や急ブレーキなど)などが考えられる。これらの外部要因は刻々と変化するため、外部要因に起因するデータをEV車内またはネットワークで接続された外部サーバに設置される推定装置にあらかじめ組み込んでおけるとは限らない。
また、EVの電力消費を推定する方法として、EVの過去の走行履歴を基に、これら外部要因による電力消費への影響を推定する方法が考えられる。しかし、各EVの過去の走行履歴は走行範囲が限定される。また、EVの走行中に遭遇した外部要因の状態も限定される。そのため、未知の外部要因への対応は困難となる。
本発明が解決しようとする課題は、特定の自動車メーカーや特定の車種に限定せずに、複数の自動車メーカーや複数の車種を対象として、さらにEV自身の持つ車内の情報だけではなくEV車外の外部要因の影響も反映して、消費電力量や走行可能距離を推定することが可能になる消費電力量推定装置を提供することにある。
実施形態によれば、消費電力量推定装置は、電気自動車の走行による電力消費に影響する情報を記憶する記憶装置と、記憶装置に記憶される情報から、電力消費の傾向が類似する複数の前記電気自動車のそれぞれの消費電力量情報を抽出する抽出部をもつ。この消費電力量推定装置は、前記抽出部により抽出した情報に基づいた情報としての、前記電気自動車の走行による電力消費に影響する情報を用いて電気自動車が走行するための必要電力量を推定するためのパラメータに基づいて、前記電気自動車が走行するための必要電力量を推定する推定部をもつ。
以下、実施の形態について、図面を参照して説明する。
(第1の実施形態)
まず、第1の実施形態について説明する。
EVの電力消費に関連する過去の履歴データと、EVの電力消費に関連する現在のデータを用いて、EVの消費電力量を推定するしくみを提案する。
図1は、EV走行消費電力量推定装置の構成例を示すブロック図である。
このEV走行消費電力量推定システムは、データ整形部11、分析用データ格納部12、知識抽出部13、知識格納部14、消費電力量推定部15を有する。
(第1の実施形態)
まず、第1の実施形態について説明する。
EVの電力消費に関連する過去の履歴データと、EVの電力消費に関連する現在のデータを用いて、EVの消費電力量を推定するしくみを提案する。
図1は、EV走行消費電力量推定装置の構成例を示すブロック図である。
このEV走行消費電力量推定システムは、データ整形部11、分析用データ格納部12、知識抽出部13、知識格納部14、消費電力量推定部15を有する。
データ整形部11は、EVの走行による電力消費に影響する情報である履歴データと固定データとを参照することで、分析用データを生成する。データ整形部11は、分析用データを記憶装置としての分析用データ格納部12に格納する。履歴データとしては、例えば、様々なEVの走行ログ、ドライバの行動に関するログ、気象情報のログ、交通情報のログなどがある。
EVの走行ログは、特定の自動車メーカーや特定の車種の走行ログに限定されない。固定データとしては、例えば、EVのカタログ情報(車重、空気抵抗係数など)データや地図情報データなどがある。
また、外部装置20には、履歴データ格納部20aと固定データ格納部20bが設けられる。EV電力消費に関連する履歴データは、履歴データ格納部20aに格納されることを前提とする。また、EV電力消費に関連する固定データは、固定データ格納部20bに格納されることを前提とする。
適用対象に応じて、EV走行消費電力量の推定に利用できる履歴データや固定データの種類や数は変わる。EV走行消費電力量は、電気自動車が以後に走行するための必要電力量と言い換えることができる。本実施形態では、履歴データや固定データの種類や数は特に限定しない。また、上述した各種ログ以外の履歴データが履歴データ格納部20aに格納されている場合もある。また、EVのカタログ情報や地図情報データ以外の固定データが固定データ格納部20bに格納されている場合もある。
知識抽出部13は、分析用データ格納部12(記憶装置)に記憶される情報から、電力消費の傾向が類似する複数のEVのそれぞれの消費電力量情報を抽出する抽出部として働く。知識抽出部13は、分析用データ格納部12に格納された分析用データを参照して、EV電力消費に関連する知識を分析用データ格納部12から抽出して、知識格納部14に格納する。ここで抽出される知識は、個々の知識を表現する枠組みとなるモデル知識と、このモデル知識に従って個々の具体的な知識を表現したパラメータ知識とから成る。
知識抽出部13は、分析用データ格納部12に格納された分析用データからグルーピングルールをモデル知識として抽出する。グルーピングルールとは、EV走行電力消費に関して似たような影響を持つグループを特定するためのルールである。
例えばEVに関しては、同一の車種が同じような電力消費の傾向を持つ場合、車種がグループの単位となる。同一の車種であっても、年式によって電力消費の傾向が異なる場合、車種と年式の組でグループの単位となる。
知識格納部14を用いることで、知識抽出部13により抽出した情報に基づいて、EVの走行による電力消費に影響する情報を補うためのパラメータを同定することができる。知識抽出部13から抽出されたモデル知識は、知識格納部14のモデル知識格納部14aに格納される。また、知識抽出部13から抽出されたパラメータ知識は、パラメータ知識格納部14bに格納される。
知識格納部14を用いることで、知識抽出部13により抽出した情報に基づいて、EVの走行による電力消費に影響する情報を補うためのパラメータを同定することができる。知識抽出部13から抽出されたモデル知識は、知識格納部14のモデル知識格納部14aに格納される。また、知識抽出部13から抽出されたパラメータ知識は、パラメータ知識格納部14bに格納される。
消費電力量推定部15は、分析用データ格納部12(記憶装置)に記憶される情報および知識格納部14に格納された各種知識に基づいて、走行による電力消費の傾向が類似する他のEVが走行するための必要電力量を推定する。消費電力量推定部15は、知識格納部14に格納された知識を用いて、EVの走行に要する消費電力量を推定する。
この消費電力量推定部15は、消費電力量推定機能を使う任意の外部システム30により利用される。外部システムについては、特に限定されない。
この消費電力量推定部15は、消費電力量推定機能を使う任意の外部システム30により利用される。外部システムについては、特に限定されない。
知識抽出部13と消費電力量推定部15とは、互いに独立に非同期で実行できる。図1に示した構成では知識抽出部13と消費電力量推定部15とが一つの知識格納部14を共有しているが、知識抽出部13と消費電力量推定部15とは、必ずしも同一の知識格納部を共有しなくても構わない。具体例について以下に説明する。
図2は、EV走行消費電力量推定装置の構成の変形例を示すブロック図である。
この変形例では、EV走行消費電力量推定装置10に知識反映部16がさらに設けられる。また、この変形例では、前述した知識格納部14は、知識抽出部13用の抽出用知識格納部14-1と、消費電力量推定部15用の推定用知識格納部14-2とに分けられている。
図2は、EV走行消費電力量推定装置の構成の変形例を示すブロック図である。
この変形例では、EV走行消費電力量推定装置10に知識反映部16がさらに設けられる。また、この変形例では、前述した知識格納部14は、知識抽出部13用の抽出用知識格納部14-1と、消費電力量推定部15用の推定用知識格納部14-2とに分けられている。
何らかのタイミングで、知識反映部16は、抽出用知識格納部14-1から推定用知識格納部14-2へ知識を反映させる。この知識反映部16は、システムとして自動化されても構わないし、人手で反映しても構わない。
図3は、EV走行消費電力量推定装置の知識抽出部13における知識抽出の手順の一例を示すフローチャートである。
最初に、知識抽出部13は、分析用データ格納部12に格納されたデータを分割する。知識抽出部13は、この分割したデータに基づいて、EVの走行による電力消費の傾向が近いグループを生成する(ステップS11)。知識抽出部13は、分割を行なうために、人間の知見に基づくヒューリスティクス(heuristics:問題を解決するための、単純で、おおよそでしかない、規則、方法、手がかり、経験則)を用いてもよい。
最初に、知識抽出部13は、分析用データ格納部12に格納されたデータを分割する。知識抽出部13は、この分割したデータに基づいて、EVの走行による電力消費の傾向が近いグループを生成する(ステップS11)。知識抽出部13は、分割を行なうために、人間の知見に基づくヒューリスティクス(heuristics:問題を解決するための、単純で、おおよそでしかない、規則、方法、手がかり、経験則)を用いてもよい。
次に、知識抽出部13は、S11で生成された各グループに対して、モデルのパラメータを推定する(ステップS12)。以前のパラメータ推定結果と比較して、推定誤差の精度の向上が認められるグループが発見でき(ステップS13のYES)、かつ、推定誤差の目標精度を満たすパラメータを推定できる場合(ステップS14のYES)、知識抽出部13は、このグループのグルーピングルールを分析用データ格納部12に格納された分析用データから抽出する。知識抽出部13は、この抽出したグルーピングルールをモデル知識格納部14aに格納する。そして、知識抽出部13は、S12で推定したパラメータをパラメータ知識格納部14bに格納する(ステップS15)。
データの今回の分割によって、データの前回の分割に対して推定誤差の精度の向上が認められない場合や(ステップS13のNO)、推定誤差の目標精度を満たすパラメータを推定できない場合で(ステップS14のNO)、分析回数が規定値を超えていない場合は(ステップS16のNO)、知識抽出部13は、推定誤差に基づいて、グループの細分化やマージによってグループを生成し直す(ステップS17)。そして、知識抽出部13は、S12以降と同じ手続きを行なう。
また、データの今回の分割によって、データの前回の分割に対して推定誤差の精度の向上が認められない場合や(ステップS13のNO)、推定誤差の目標精度を満たすパラメータを推定できない場合であって(ステップS14のNO)、分析回数が規定値を超えている場合は(ステップS16のYES)、知識抽出部13は、S15で抽出したグルーピングルールをモデル知識格納部14aに格納する。また、知識抽出部13は、S12で推定したパラメータをパラメータ知識格納部14bに格納し、推定誤差を達成可能な精度を有する情報を知識格納部14の所定の記憶領域に格納する(ステップS18)。
次に、第1の実施形態について説明する。
本実施形態では、知識抽出部13による知識の抽出と、その知識を用いた消費電力量推定の典型的な事例を示す。
図4は、第1の実施形態におけるEV走行消費電力量推定装置のシステム構成の一例を示すブロック図である。
本実施形態では、図4で説明したように、EV走行消費電力量推定装置は、データ整形部11、分析用データ格納部12、知識抽出部13、知識格納部14、消費電力量推定部15を有する。また、EV走行消費電力量推定装置とは別に、外部装置20、消費電力量推定機能を使用する外部システム30、気象情報提供システム40が設けられる。
本実施形態では、知識抽出部13による知識の抽出と、その知識を用いた消費電力量推定の典型的な事例を示す。
図4は、第1の実施形態におけるEV走行消費電力量推定装置のシステム構成の一例を示すブロック図である。
本実施形態では、図4で説明したように、EV走行消費電力量推定装置は、データ整形部11、分析用データ格納部12、知識抽出部13、知識格納部14、消費電力量推定部15を有する。また、EV走行消費電力量推定装置とは別に、外部装置20、消費電力量推定機能を使用する外部システム30、気象情報提供システム40が設けられる。
外部装置20は、履歴データ格納部20aおよび固定データ格納部20bを有する。履歴データ格納部20aには、EV走行ログデータ、交通情報ログデータおよび気象情報ログデータが格納される。固定データ格納部20bには、EV車両情報データおよび道路情報データが格納される。
データ整形部11は、外部装置20の履歴データ格納部20aに格納されるログとしての、EV走行ログ、交通情報ログ、気象情報ログを参照する。
EV走行ログは、例えば高速道路の路側装置を介して収集されているデータである。
交通情報ログは、例えば交通管制局の履歴である。気象情報ログは、例えば気象庁などの履歴である。本実施形態では、これら履歴データの収集方法、履歴データへのアクセス方法、それらのデータ形式については特に定めない。
データ整形部11は、外部装置20の履歴データ格納部20aに格納されるログとしての、EV走行ログ、交通情報ログ、気象情報ログを参照する。
EV走行ログは、例えば高速道路の路側装置を介して収集されているデータである。
交通情報ログは、例えば交通管制局の履歴である。気象情報ログは、例えば気象庁などの履歴である。本実施形態では、これら履歴データの収集方法、履歴データへのアクセス方法、それらのデータ形式については特に定めない。
また、データ整形部11は、外部装置20の固定データ格納部20bに格納されるデータとしての、EV車両情報データと道路情報データとを参照する。EV車両情報データとは、自動車メーカーのカタログから入手可能なデータとする。また道路情報データは、地図データから入手可能なデータとする。本実施形態では、これらのデータ形式については特に定めない。
分析用データ格納部12には、データ整形部11が整形したデータが格納される。データ整形部11は、外部装置20の履歴データ格納部20aに格納された各種ログデータを整形して、ドライバ情報とEV走行電力消費量情報を作成する。データ整形部11は、この作成した各種情報を分析用データ格納部12に格納する。
分析用データ格納部12に格納される交通情報ログデータは、履歴データ格納部20aに格納された交通情報ログデータをそのまま利用したものである。また、分析用データ格納部12に格納される気象情報ログデータは、履歴データ格納部20aに格納された気象情報ログデータをそのまま利用したものである。また、分析用データ格納部12に格納されるEV車両情報は、固定データ格納部20bに格納されたデータとしてのEV車両情報をそのまま利用したものである。また、分析用データ格納部12に格納される道路情報も、固定データ格納部20bに格納されたデータとしての道路情報をそのまま利用したものである。
知識格納部14のモデル知識格納部14aには、ドライバモデル、車両モデル、道路モデル、交通情報モデルのグルーピングルールとしてのドライバモデルグルーピングルール、車両モデルグルーピングルール、道路モデルグルーピングルール、交通情報モデルグルーピングルールが格納される。これらはあくまで例であり、ここで説明するグルーピングルールが本実施形態で扱う全てのグルーピングルールではない。例えば、あるドライバがある道路を走行するという、ドライバと道路の組で走行の特性をグルーピングできる場合、そのドライバと道路の組のグルーピングルールを表すための走行モデルグルーピングルールを用意することもできる。
知識格納部14のモデル知識格納部14aには、ドライバモデル、車両モデル、道路モデル、交通情報モデルのグルーピングルールとしてのドライバモデルグルーピングルール、車両モデルグルーピングルール、道路モデルグルーピングルール、交通情報モデルグルーピングルールが格納される。これらはあくまで例であり、ここで説明するグルーピングルールが本実施形態で扱う全てのグルーピングルールではない。例えば、あるドライバがある道路を走行するという、ドライバと道路の組で走行の特性をグルーピングできる場合、そのドライバと道路の組のグルーピングルールを表すための走行モデルグルーピングルールを用意することもできる。
また、知識格納部14のパラメータ知識格納部14bには、ドライバモデル、車両モデル、道路モデル、交通情報モデルのパラメータとしての、ドライバモデルパラメータ、車両モデルパラメータ、道路モデルパラメータ、交通情報モデルパラメータがそれぞれ格納される。これらはあくまで例であり、ここで説明するパラメータが本実施形態で扱う全てのパラメータではない。例えば、上述したように、あるドライバがある道路を走行するという、ドライバと道路の組で走行の特性をグルーピングできる場合、そのドライバと道路の組のパラメータを表すための走行モデルパラメータを用意することもできる。
次に、分析用データ格納部12に格納されるデータのデータ構造について説明する。図5から図10に各データ構造を例示する。これらはあくまで例であり、ここで説明するデータが本実施形態で扱う全データではない。
図5は、分析用データ格納部12に格納されるドライバ情報のデータ構造の一例を表形式で示した図である。
ドライバ情報を構成する各種データは、外部装置20の履歴データ格納部20aから入手したEV走行ログデータに基づいて、データ整形部11で計算されて整形されたものである。
ドライバ情報を構成する各種データは、外部装置20の履歴データ格納部20aから入手したEV走行ログデータに基づいて、データ整形部11で計算されて整形されたものである。
ここでは、ドライバ情報には、ドライバごとに、EV電力消費に影響するデータがデータ整形部11により計算されて格納されている。
この格納されるデータは、(1)ドライバに固有のドライバID、(2)ドライバが運転するEVの平均速度(km/h)、(3)ドライバがEVのアクセルペダルを踏む際のEVの平均加速度としてのアクセル平均加速度(km/s^2)、(4)ドライバがEVのブレーキペダルを踏む際のEVの減速度としての平均ブレーキ加速度(km/s^2)、(5)ドライバによるEVの加減速頻度(%)、(6)ドライバが運転するEV内のエアコン設定温度(℃)などである。加減速頻度とは、EVの走行時間全体のうち加減速している時間の割合である。
図6は、分析用データ格納部12に格納されるEV走行電力消費情報のデータ構造の一例を表形式で示す図である。
EV走行電力消費情報を構成するデータは、外部装置20の履歴データ格納部20aから入手したEV走行ログデータに基づいて、データ整形部11で計算されて整形されたものである。
EV走行電力消費情報を構成するデータは、外部装置20の履歴データ格納部20aから入手したEV走行ログデータに基づいて、データ整形部11で計算されて整形されたものである。
EV走行ログデータでは、ある時刻において、あるドライバがあるEVを運転して、このEVが、ある道路切片(経路切片)を通過した際のスナップショットのデータが列挙される。道路切片とは、道路を適当な切片に分断したものである。
図6に示すように、EV走行電力消費情報には、EVの走行日時ごとに、EV電力消費に影響するデータがデータ整形部11により計算されて格納されている。
この格納されるデータは、(1)現在日時、(2)道路切片に固有の道路切片ID、(3)EV車体に固有のEV車体ID、(4)EV車種に固有のEV車種ID、(5)ドライバID、(6)EVが道路切片IDに対応する道路切片を通過した場合の平均速度(km/h)、(7)道路切片IDに対応する道路切片を通過するEVの加減速頻度(%)、(8)道路切片IDに対応する道路切片をEV車体IDに対応するEVが通過する間に要した消費電力量(kWh)などである。
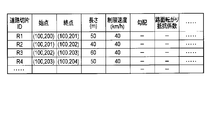
図7は、分析用データ格納部12に格納される交通情報ログのデータ構造の一例を表形式で示す図である。
交通情報ログを構成する各種データは、外部装置20の履歴データ格納部20aから入手した交通情報ログデータに基づいて、データ整形部11が整形したものである。
交通情報ログを構成する各種データは、外部装置20の履歴データ格納部20aから入手した交通情報ログデータに基づいて、データ整形部11が整形したものである。
交通情報ログのデータでは、EV電力消費に影響するデータがデータ整形部11により計算されて格納されている。
この格納されるデータは、(1)交通情報に固有の交通情報ID、(2)交通情報の年月日、(3)曜日、(4)時刻、(5)交通情報が対象とする道路切片ID、(6)この道路切片IDに対応する道路切片の制限速度(km/h)、(7)この道路切片IDに対応する道路切片を通過する車両の平均速度(km/h)、(8)道路切片IDに対応する道路切片についての単位時間当たりの通行台数などである。
図8は、分析用データ格納部12に格納される気象情報ログのデータ構造の一例を表形式で示す図である。
気象情報ログを構成する各種データは、外部装置20の履歴データ格納部20aから入手した気象情報ログデータに基づいて、データ整形部11が整形したものである。
気象情報ログを構成する各種データは、外部装置20の履歴データ格納部20aから入手した気象情報ログデータに基づいて、データ整形部11が整形したものである。
気象情報ログのデータでは、EV電力消費に影響するデータがデータ整形部11により計算されて格納されている。この格納されるデータは、(1)気象情報に固有の気象情報ログID、(2)気象情報の年月日、(3)曜日、(4)時刻、(5)気象情報が対象とする場所情報、(6)この場所情報が示す場所における気温(℃)、(7)場所情報が示す場所における天気、(8)場所情報が示す場所における風力(m/s)などである。
図9は、分析用データ格納部12に格納されるEV車両情報のデータ構造の一例を表形式で示す図である。
EV車両情報を構成する各種データは、外部装置20の履歴データ格納部20aから入手したEV車両情報データ(自動車メーカーが公開しているカタログ情報)に基づいて、データ整形部11が整形したものである。
EV車両情報を構成する各種データは、外部装置20の履歴データ格納部20aから入手したEV車両情報データ(自動車メーカーが公開しているカタログ情報)に基づいて、データ整形部11が整形したものである。
EV車両情報では、EV車両ごとに、EV電力消費に影響するデータがデータ整形部11により計算されて格納される。この格納されるデータは、(1)EV車両が属する車種に固有のEV車種ID、(2)EV車両の名称、(3)EVの蓄電池容量(kWh)、(4)車両重量(kg)、(5)空気抵抗係数、(6)投影面積(m^2)、(7)走行効率、(8)回生エネルギー効率などである。図9に示したEV車両情報における、走行効率や回生エネルギー効率の列については、カタログ情報からは入手できず、空欄となっている。
これら空欄の列は、このEV車両情報のデータには不要だが、後で知識格納部14のデータと対比する際に説明を分かり易くするために、ここのEV車両情報にも、これら空欄の列を記載している。
図10は、分析用データ格納部12に格納される道路情報のデータ構造の一例を表形式で示す図である。
道路情報を構成する各種データは、外部装置20の履歴データ格納部20aから入手した道路情報データ(地図情報データを参照)に基づいて、データ整形部11が整形したものである。
道路情報を構成する各種データは、外部装置20の履歴データ格納部20aから入手した道路情報データ(地図情報データを参照)に基づいて、データ整形部11が整形したものである。
道路情報では、道路を適当な切片に分断した道路切片ごとに、EV電力消費に影響するデータがデータ整形部11により計算されて格納される。この格納されるデータは、(1)道路切片に固有の道路切片ID、(2)この道路切片IDに対応する道路切片の始点、(3)道路切片IDに対応する道路切片の終点、(4)この道路切片の長さ(m)、(5)道路切片における制限速度(km/h)、(6)勾配(radian)、(7)路面転がり抵抗係数などである。道路情報における勾配や路面転がり抵抗係数の列については、地図情報データからは入手できず、空欄となっている。
これら空欄の列は、この道路情報データのデータには不要である。しかし、後で知識格納部14のデータと対比する際に説明を分かり易くするために、ここの道路情報にもこれらの空欄の列が記載される。
次に、知識抽出部13の動作について説明する。
知識抽出部13は、図3に示した知識抽出の手順に従って、モデル知識とパラメータ知識とをそれぞれ生成する。
本実施形態における知識抽出のための手順を説明する。最初に、知識抽出部13は、分析用データ格納部12に格納されるEV走行電力消費情報のデータを適切なグループに分割する。そして知識抽出部13は、各グループのパラメータを推定する。この推定の結果、推定誤差の精度の向上が認められれば、知識抽出部13は、新たなグルーピングルールを知識格納部14のモデル知識格納部14aに格納する。また、知識抽出部13は、各グループに対して同定するためのパラメータを知識格納部14のパラメータ知識格納部14bに格納する。
知識抽出部13は、図3に示した知識抽出の手順に従って、モデル知識とパラメータ知識とをそれぞれ生成する。
本実施形態における知識抽出のための手順を説明する。最初に、知識抽出部13は、分析用データ格納部12に格納されるEV走行電力消費情報のデータを適切なグループに分割する。そして知識抽出部13は、各グループのパラメータを推定する。この推定の結果、推定誤差の精度の向上が認められれば、知識抽出部13は、新たなグルーピングルールを知識格納部14のモデル知識格納部14aに格納する。また、知識抽出部13は、各グループに対して同定するためのパラメータを知識格納部14のパラメータ知識格納部14bに格納する。
本実施形態では、グルーピングする際に、人によるヒューリスティクス(heuristics)を組み込む。本実施形態におけるグルーピングの観点と、各グループで同定したいパラメータを以下に示す。また、このグルーピングとパラメータ同定の具体例について図11に示す。
(1)EVの走行電力消費情報データが、同一の道路切片列を走行する多数のEVの走行電力消費情報データである場合、知識格納部14は、このグループ分割では、道路切片列の特性(勾配や路面転がり抵抗係数など)を同定する。
(2)EVの走行電力消費情報データが、同一の車種に属する多数のEVの走行電力消費情報データである場合、知識格納部14は、このグループ分割では、各EV車種の特性(走行効率、回生エネルギー効率など)を同定する。
(3)EVの走行電力消費情報データが、同一の道路切片列を走行する同一車種の多数のEVの走行電力消費情報データである場合、知識格納部14は、このグループ分割では、道路とEVの相互作用による特性(路面転がり抵抗係数など)を同定する。
上記の(1)、(2)、(3)の手順を経て、知識格納部14は、第1のパラメータおよび第2のパラメータを得る。
第1のパラメータとは、知識抽出部13により抽出した消費電力量情報としての、所定の道路切片グループに属する道路切片を通行する複数のEVのそれぞれの消費電力量情報(例えばEVの走行電力消費情報データ)に基づいて、この所定の道路切片グループに属する道路切片に関わる道路情報を補うためのパラメータである。
第2のパラメータとは、知識抽出部13により抽出した消費電力量情報としての、電力消費に関わる特性(例えばEVの走行電力消費情報データ)が類似する所定の車両グループ(図14の説明として後述)に属する複数のEVそれぞれの消費電力量情報である。
知識格納部14は、第1および第2のパラメータに基づいて、この所定の車両グループに属するEVに関わるEV車両情報を補うためのパラメータについて、第1および第2のパラメータの双方を同定する。知識格納部14は、第1および第2のパラメータのいずれかだけを同定しても良い。上述した以外の、以下で説明する他のパラメータについても同様である。
これらの他にも、例えば同じような運転の仕方をするドライバをグルーピングすることも考えられる。しかし、本実施形態ではグルーピングルールの説明にあたり、ドライバをグルーピングせずに個別に扱う。
次に、知識抽出部13によって抽出されるモデル知識について説明する。
モデル知識として、上述したグルーピングの観点で抽出されるグルーピングルールについて説明する。
図12は、本実施形態で適用されるグルーピングルール一覧を示す図である。
図12に示した例では、グルーピングルールごとに、(1)このグルーピングルールに固有のルールID、(2)グルーピングルールが対象とするモデルの種別に固有のモデルID、(3)このモデルIDに対応するモデルに対するグルーピングの方法を示すルール項目が関連付けられる。具体的には、本実施形態では、ドライバモデルが個別にグルーピングされ、車両モデルがEV車種の属性指定よりグルーピングされ、道路モデルが道路切片IDの列挙によりグルーピングされ、交通情報モデルは交通情報の属性指定によりグルーピングされる。
モデル知識として、上述したグルーピングの観点で抽出されるグルーピングルールについて説明する。
図12は、本実施形態で適用されるグルーピングルール一覧を示す図である。
図12に示した例では、グルーピングルールごとに、(1)このグルーピングルールに固有のルールID、(2)グルーピングルールが対象とするモデルの種別に固有のモデルID、(3)このモデルIDに対応するモデルに対するグルーピングの方法を示すルール項目が関連付けられる。具体的には、本実施形態では、ドライバモデルが個別にグルーピングされ、車両モデルがEV車種の属性指定よりグルーピングされ、道路モデルが道路切片IDの列挙によりグルーピングされ、交通情報モデルは交通情報の属性指定によりグルーピングされる。
本実施形態ではグルーピングの方法を図12に示すグルーピングルール一覧で管理している。しかし、個々のグルーピングルール(次に説明する図13乃至図16)においてグルーピングの方法を認識可能であれば、図12のグルーピングルール一覧は特に用意しなくても良い。
道路モデル、車両モデル、ドライバモデル、交通情報モデルのそれぞれのグルーピングルールを図13から図16に示す。
図13は、道路モデルグルーピングルールの一例を示す図である。
道路モデルは、前述したように道路切片IDの列挙によってグルーピングされる。本実施形態では、隣り合ういくつかの道路切片列が、EV電力消費に影響する同じ特性を持つとの前提でグルーピングされ、パラメータが同定される。
図13は、道路モデルグルーピングルールの一例を示す図である。
道路モデルは、前述したように道路切片IDの列挙によってグルーピングされる。本実施形態では、隣り合ういくつかの道路切片列が、EV電力消費に影響する同じ特性を持つとの前提でグルーピングされ、パラメータが同定される。
図13に示した例では、隣り合う道路切片R1,R2,R3がグループID「1」に対応するグループにグルーピングされ、隣り合う道路切片R4,R5がグループID「2」に対応するグループにグルーピングされる。
図14は、車両モデルグルーピングルールの一例を示す図である。
車両(EV)モデルは、前述したように属性を指定してグルーピングされている。本実施形態では、車両モデルは、EV車種IDに対応する車種ごとにグルーピングされる。場合によっては、推定精度をより向上させるために、車種だけでなく、車種と年式の組にグルーピングしても良い。
車両(EV)モデルは、前述したように属性を指定してグルーピングされている。本実施形態では、車両モデルは、EV車種IDに対応する車種ごとにグルーピングされる。場合によっては、推定精度をより向上させるために、車種だけでなく、車種と年式の組にグルーピングしても良い。
図15は、ドライバモデルグルーピングルールの一例を示す図である。
本実施形態では、ドライバモデルを特にグルーピングせずに、各ドライバを個別に扱う。
図16は、交通情報モデルグルーピングルールの一例を示す図である。
交通情報モデルは、属性が指定されてグルーピングされる。本実施形態では、交通情報モデルは、曜日と時間帯でグルーピングされる。
本実施形態では、ドライバモデルを特にグルーピングせずに、各ドライバを個別に扱う。
図16は、交通情報モデルグルーピングルールの一例を示す図である。
交通情報モデルは、属性が指定されてグルーピングされる。本実施形態では、交通情報モデルは、曜日と時間帯でグルーピングされる。
次に、知識抽出部13によって抽出されるパラメータ知識について説明する。
ここでは、上述したグルーピングにより同定される各モデルのパラメータについて説明する。道路モデル、車両モデル、ドライバモデル、交通情報モデルのそれぞれのパラメータを図17から図20に示す。
本実施形態では、知識抽出部13によって抽出されるパラメータ知識格納部14bのデータ構造(図17乃至図20)には、データ整形部11が生成する分析用データ格納部12のデータ構造(図5乃至図10)に列を追加する形で表現されるものがある。しかし、これらはあくまで例であり、パラメータ知識格納部14bのデータ構造と分析用データ格納部12とのそれぞれは、全く異なる形式でも良い。
ここでは、上述したグルーピングにより同定される各モデルのパラメータについて説明する。道路モデル、車両モデル、ドライバモデル、交通情報モデルのそれぞれのパラメータを図17から図20に示す。
本実施形態では、知識抽出部13によって抽出されるパラメータ知識格納部14bのデータ構造(図17乃至図20)には、データ整形部11が生成する分析用データ格納部12のデータ構造(図5乃至図10)に列を追加する形で表現されるものがある。しかし、これらはあくまで例であり、パラメータ知識格納部14bのデータ構造と分析用データ格納部12とのそれぞれは、全く異なる形式でも良い。
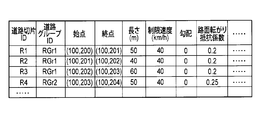
図17は、道路モデルパラメータの一例を示す図である。
図17に示した例では、道路モデルパラメータでは、道路切片ごとに、EV電力消費に影響するデータが関連付けられる。この電力消費に影響するデータは、(1)道路切片ID、(2)道路モデルグルーピングルールに基づいて定められる道路グループID、(3)道路切片IDに対応する道路切片の始点、(4)道路切片IDに対応する道路切片の終点、(5)この道路切片の長さ(m)、(6)道路切片における制限速度(km/h)、(7)勾配、(8)路面転がり抵抗係数などである。
図17に示した例では、道路モデルパラメータでは、道路切片ごとに、EV電力消費に影響するデータが関連付けられる。この電力消費に影響するデータは、(1)道路切片ID、(2)道路モデルグルーピングルールに基づいて定められる道路グループID、(3)道路切片IDに対応する道路切片の始点、(4)道路切片IDに対応する道路切片の終点、(5)この道路切片の長さ(m)、(6)道路切片における制限速度(km/h)、(7)勾配、(8)路面転がり抵抗係数などである。
前述したように、道路モデルパラメータは、隣り合う道路切片によりグルーピングされる。この道路パラメータは、図17に示したIDとしての、EV電力消費に影響する類似した特性を有する道路切片に対応する行に同一の道路グループIDが知識抽出部13により付与される。
この道路モデルパラメータは、図10に示した道路情報と比較して、EVグループIDが設定される点で異なる。また、この道路パラメータでは、勾配や路面転がり抵抗係数の値などが新たにパラメータ値として推定される。これらの値が推定される第1の理由は、ある道路グループIDに対応するグループに属する道路切片に対して多数のEVが走行した場合の消費電力量を示す履歴データがEV走行電力消費情報データに示されるからである。第2の理由は、このEV走行電力消費情報で示される平均速度、加減速速度、消費電力量などに基づいて、同じ道路グループIDに対応するグループに属する道路切片の特性を知識抽出部13が推定できるためである。
図18は、車両モデルパラメータの一例を示す図である。
図18に示した例では、車両モデルパラメータは、EV車種ごとに、EV電力消費に影響するデータが関連付けられる。このデータは、(1)EV車種ID、(2)車両モデルグルーピングルールに基づいて定められるEVグループID、(3)このEVグループIDに属するEV車両の名称、(4)蓄電池容量(kWh)、(5)車両重量(kg)、(6)空気抵抗係数、(7)投影面積(m^2)、(8)走行効率、(9)回生エネルギー効率などである。
図18に示した例では、車両モデルパラメータは、EV車種ごとに、EV電力消費に影響するデータが関連付けられる。このデータは、(1)EV車種ID、(2)車両モデルグルーピングルールに基づいて定められるEVグループID、(3)このEVグループIDに属するEV車両の名称、(4)蓄電池容量(kWh)、(5)車両重量(kg)、(6)空気抵抗係数、(7)投影面積(m^2)、(8)走行効率、(9)回生エネルギー効率などである。
前述したように、車両モデルパラメータは、EV車種によりグルーピングされ、図18に示した、EV電力消費に影響する類似した特性を有する車種に対応する行に同一のEVグループIDが知識抽出部13により付与される。
また、本実施形態では、車両モデルパラメータは、図9に示したEV車両情報と比較して、EVグループIDが設定される点で異なる他、走行効率や回生エネルギー効率の値などが新たにパラメータ値として推定される。このパラメータが推定される第1の理由は、図17に示したように道路モデルパラメータ値が推定されると、同一EV車両グループに属する多数のEVが各道路グループに属する道路切片を走行した際の消費電力の履歴データがEV走行電力消費情報データに示されるからである。第2の理由は、このEV走行電力消費情報データで示される平均速度、加減速速度、消費電力量などに基づいて、同じ車両グループIDに対応するグループに属するEV車両(本実施形態では個々のEV車両に対応)の特性を知識抽出部13が推定できるためである。
図19は、ドライバモデルパラメータの一例を示す図である。
図19に示した例では、ドライバモデルパラメータは、ドライバごとに、EV電力消費に影響するデータが関連付けられる。このデータは、(1)ドライバID、(2)ドライバモデルグルーピングルールに基づいて定められるドライバグループID、(3)このドライバグループIDに属するドライバが運転するEVの平均速度(km/h)、(4)平均アクセル加速度(km/s^2)、(5)平均ブレーキ加速度(km/s^2)、(6)加減速頻度(%)、(7)エアコン設定温度(℃)などである。ドライバモデルのパラメータは、図5に示したドライバ情報データと比較して、ドライバグループIDがさらに設定される点で異なる。
図19に示した例では、ドライバモデルパラメータは、ドライバごとに、EV電力消費に影響するデータが関連付けられる。このデータは、(1)ドライバID、(2)ドライバモデルグルーピングルールに基づいて定められるドライバグループID、(3)このドライバグループIDに属するドライバが運転するEVの平均速度(km/h)、(4)平均アクセル加速度(km/s^2)、(5)平均ブレーキ加速度(km/s^2)、(6)加減速頻度(%)、(7)エアコン設定温度(℃)などである。ドライバモデルのパラメータは、図5に示したドライバ情報データと比較して、ドライバグループIDがさらに設定される点で異なる。
本実施形態では、ドライバモデルパラメータでは、ドライバのグルーピングが特に行なわれずに、ドライバのそれぞれの特性が個別に扱われる。そのため、ドライバモデルに関しては、ドライバ情報に対する新たな知識は特に抽出されない。知識抽出部13は、分析用データ格納部12に格納されたパラメータとしての、図5に示したドライバ情報のデータを、そのままドライバモデルパラメータとして用いる。これにより、図19に示したドライバモデルパラメータにおけるドライバグループIDはドライバIDと同一となる。
図20は、交通情報モデルパラメータの一例を示す図である。
図20に示した例では、交通情報モデルパラメータは、EV電力消費に影響するデータが関連付けられる。このデータは、(1)交通情報ID、(2)交通情報モデルグルーピングルールに基づいて定められる交通情報グループID、(3)交通情報の年月日、(4)曜日、(5)時刻、(6)交通情報が対象とする道路切片ID、(7)道路切片IDに対応する道路切片の制限速度(km/h)、(8)道路切片IDに対応する道路切片を通過する車両の平均速度(km/h)、(9)道路切片IDに対応する道路切片についての単位時間当たりの通行台数などである。交通情報モデルパラメータは、図7に示した交通情報データと比較して、交通情報グループIDがさらに設定される点で異なる。
図20に示した例では、交通情報モデルパラメータは、EV電力消費に影響するデータが関連付けられる。このデータは、(1)交通情報ID、(2)交通情報モデルグルーピングルールに基づいて定められる交通情報グループID、(3)交通情報の年月日、(4)曜日、(5)時刻、(6)交通情報が対象とする道路切片ID、(7)道路切片IDに対応する道路切片の制限速度(km/h)、(8)道路切片IDに対応する道路切片を通過する車両の平均速度(km/h)、(9)道路切片IDに対応する道路切片についての単位時間当たりの通行台数などである。交通情報モデルパラメータは、図7に示した交通情報データと比較して、交通情報グループIDがさらに設定される点で異なる。
前述したように、交通情報モデルパラメータは曜日と時間帯によりグルーピングされる。このパラメータでは、図20に示した、EV電力消費に影響する類似した特性を有する交通情報に対応する行に同一の交通情報グループIDが付与される。この理由は、本実施形態では、交通情報では日付による交通状態の違いは特になく、交通情報で示される曜日や時間帯に基づいて、知識抽出部13は、EVでの電力消費に影響する類似した特性を有する交通状態を特定できるためである。
次に、消費電力量推定部15の動作について説明する。
ここでは、消費電力量推定部15による消費電力量を推定する方法を説明する。図21は、消費電力量推定部15における消費電力量推定のための手順の一例を示すフローチャートである。
ここでは、消費電力量推定部15による消費電力量を推定する方法を説明する。図21は、消費電力量推定部15における消費電力量推定のための手順の一例を示すフローチャートである。
最初に、消費電力量推定部15は、消費電力量推定に関わる消費電力量推定時点の情報を消費電力量推定機能を使う外部システム30から受け取る(ステップS21)。次に、消費電力量推定部15は、外部システム30から受け取った、消費電力量推定時点の情報に合致するグループを知識格納部14を検索して選択する(ステップS22)。
ここで、いずれかのモデルにおいて合致するグループが複数存在する場合(ステップS23のYES)、消費電力量推定部15は、各モデルで合致する複数グループのうち、最も細分化されたグループを選択する(ステップS24)。
合致するグループが複数存在しない場合(ステップS23のNO)、消費電力量推定部15は、各グループの図16から図20で示されるようなパラメータを特定する(ステップS25)。消費電力量推定部15は、これらのパラメータを用いてEVの消費電力量の推定値を計算する(ステップS26)。また、外部システム30は、消費電力量の推定値に基づいて、EVの走行可能距離の推定値を推定できる。消費電力量の推定値を計算する方法については、本実施形態では特に限定しない。また、消費電力量の推定値を計算する方法が任意の計算方法であっても良い。
本実施形態における消費電力量の推定値を計算するための式の一例を以下の式(1)に示す。
消費電力量=走行消費電力量+走行以外の消費電力量-回生エネルギー量 …式(1)
式(1)の走行消費電力量は以下の式(2)で示される。
走行消費電力量Pe=η×Pp …式(2)
η:走行効率
Pp:走行仕事量
式(2)の走行仕事量Ppは以下の式(3)で示される。
走行仕事量Pp=R×l …式(3)
R:走行抵抗
l:走行距離
式(3)の走行抵抗Rは以下の式(4)で示される。
走行抵抗R=Ra+Rr+Re+Rc …式(4)
Ra:空気抵抗
Rr:転がり抵抗
Re:勾配抵抗
Rc:加速抵抗
式(4)の空気抵抗Raは以下の式(5)で示される。
空気抵抗Ra=1/2×ρ×Cd×A×V^2 …式(5)
ρ:空気密度
Cd:空気抵抗係数
A:投影面積
V:速度
式(4)の転がり抵抗Rrは以下の式(6)で示される。
転がり抵抗Rr=μ×M×g×cosθ …式(6)
μ:路面転がり抵抗係数
M:車両総重量
g:重力加速度
θ:勾配
式(4)の勾配抵抗Reは以下の式(7)で示される。
勾配抵抗Re=M×g×sinθ …式(7)
式(4)の加速抵抗Rcは以下の式(8)で示される。
加速抵抗Rc=α×(M+Mi) …式(8)
α:加速度
Mi:回転部分慣性重量
式(1)に示すように、消費電力量は、EVの走行にかかる消費電力量(走行消費電力量)と走行以外の消費電力量の和から回生エネルギー量を差し引いた量となる。
式(2)に示すように、走行消費電力量は、走行に必要な仕事量(走行仕事量)に、走行効率を乗算した量となる。
式(3)に示すように、走行仕事量は、走行時に車が受ける抵抗(走行抵抗)と走行距離とに比例する。
式(4)に示すように、走行抵抗は、空気抵抗、転がり抵抗、勾配抵抗、加速抵抗の和である。
消費電力量=走行消費電力量+走行以外の消費電力量-回生エネルギー量 …式(1)
式(1)の走行消費電力量は以下の式(2)で示される。
走行消費電力量Pe=η×Pp …式(2)
η:走行効率
Pp:走行仕事量
式(2)の走行仕事量Ppは以下の式(3)で示される。
走行仕事量Pp=R×l …式(3)
R:走行抵抗
l:走行距離
式(3)の走行抵抗Rは以下の式(4)で示される。
走行抵抗R=Ra+Rr+Re+Rc …式(4)
Ra:空気抵抗
Rr:転がり抵抗
Re:勾配抵抗
Rc:加速抵抗
式(4)の空気抵抗Raは以下の式(5)で示される。
空気抵抗Ra=1/2×ρ×Cd×A×V^2 …式(5)
ρ:空気密度
Cd:空気抵抗係数
A:投影面積
V:速度
式(4)の転がり抵抗Rrは以下の式(6)で示される。
転がり抵抗Rr=μ×M×g×cosθ …式(6)
μ:路面転がり抵抗係数
M:車両総重量
g:重力加速度
θ:勾配
式(4)の勾配抵抗Reは以下の式(7)で示される。
勾配抵抗Re=M×g×sinθ …式(7)
式(4)の加速抵抗Rcは以下の式(8)で示される。
加速抵抗Rc=α×(M+Mi) …式(8)
α:加速度
Mi:回転部分慣性重量
式(1)に示すように、消費電力量は、EVの走行にかかる消費電力量(走行消費電力量)と走行以外の消費電力量の和から回生エネルギー量を差し引いた量となる。
式(2)に示すように、走行消費電力量は、走行に必要な仕事量(走行仕事量)に、走行効率を乗算した量となる。
式(3)に示すように、走行仕事量は、走行時に車が受ける抵抗(走行抵抗)と走行距離とに比例する。
式(4)に示すように、走行抵抗は、空気抵抗、転がり抵抗、勾配抵抗、加速抵抗の和である。
EVの消費電力量は気温などの気象状態にも依存する。この気象情報を考慮する場合で、EVの消費電力量を推定する場合には、消費電力量推定部15は、気象情報データ(図8参照)を取得する。消費電力量推定部15は、この取得した気象情報で示される場所と、EV走行電力消費情報で示される道路切片との関係を計算する。消費電力量推定部15は、この計算結果を考慮して、EVの走行に要する消費電力量を推定する。また、この気象情報は、図1に示した気象情報提供システム40などから提供されてもよい。また、EVの消費電力量推定に利用するための前述した気象情報提供システム40は任意であり、本実施形態では特に限定しない。また、EVの消費電力量を推定するにあたり、必ずしも気象情報提供システム40を利用して気象情報を取得しなくても良い。
以上のように、第1の実施形態におけるEV走行消費電力量推定装置では、EVの走行に要する消費電力量を推定する機能において、新たな条件、例えばドライバ情報、交通情報、車両情報などへの適応力を高くできる。また、このEV走行消費電力量推定装置は、EV走行履歴データなどをグルーピングして分析し、消費電力量を推定するためのモデルをグルーピングし、このグルーピングで特定したグループに属するEVの消費電力量を推定する。これにより、このEV走行消費電力量推定装置は、様々な道路や多数のEV車種を対象として消費電力量を推定できる。
また、本実施形態におけるEV走行消費電力量推定装置は、単体のEVだけでは推定が困難なである影響としての、EV車外の外部要因の影響も反映して消費電力量や走行可能距離を推定できる。また、このEV走行消費電力量推定装置は、特定の自動車メーカーや車種に依存せずに消費電力量や走行可能距離を推定できる。
また、本実施形態におけるEV走行消費電力量推定装置は、特定の自動車メーカーや特定の車種に限定せずに、複数の自動車メーカーや複数の車種を対象として消費電力量や走行可能距離を推定できる。
また、本実施形態におけるEV走行消費電力量推定装置は、特定の自動車メーカーや特定の車種に限定せずに、複数の自動車メーカーや複数の車種を対象として消費電力量や走行可能距離を推定できる。
(第2の実施形態)
次に、第2の実施形態について説明する。なお、本実施形態における構成のうち第1の実施形態で説明した構成と同一構成の詳細な説明は省略する。
第2の実施形態では、カーシェアやレンタカーなどの予約時に、予約情報から借用時の消費電力量を推定する事例を示す。
次に、第2の実施形態について説明する。なお、本実施形態における構成のうち第1の実施形態で説明した構成と同一構成の詳細な説明は省略する。
第2の実施形態では、カーシェアやレンタカーなどの予約時に、予約情報から借用時の消費電力量を推定する事例を示す。
図22は、第2の実施形態におけるEV走行消費電力量推定装置のシステム構成の一例を示すブロック図である。
このシステム構成は、第1の実施形態のシステム構成とほぼ同じである。第2の実施形態のシステム構成が第1の実施形態のシステム構成と異なる点は、EVをカーシェアやレンタカーとして利用するための予約申請情報ログが外部装置20の履歴データ格納部20aにさらに格納されている点である。この予約申請情報ログは分析用データ格納部12にそのまま格納される。
このシステム構成は、第1の実施形態のシステム構成とほぼ同じである。第2の実施形態のシステム構成が第1の実施形態のシステム構成と異なる点は、EVをカーシェアやレンタカーとして利用するための予約申請情報ログが外部装置20の履歴データ格納部20aにさらに格納されている点である。この予約申請情報ログは分析用データ格納部12にそのまま格納される。
図23は、予約申請情報の一例を示す図である。予約申請情報には、カーシェアやレンタカー利用者による予約を申請するための情報が含まれる。予約申請情報には、EVの貸し出し先のドライバを特定するための情報としての予約ID、予約者IDが定められる。また、予約申請情報には、ドライバによる借用開始予定の日時、借用終了予定の日時、および貸出予定のEVの目的地が記載される。予約申請情報では、固定情報として出発地が定められる。
また、第1の実施形態と異なり、第2の実施形態では、消費電力量推定機能を使う外部システム30がこの機能を呼び出す場合にも、引数として予約申請情報が消費電力量推定部15渡される。
予約申請情報を引数として受け取った消費電力量推定部15は、パラメータ知識格納部14bに格納されたパラメータのうち、貸出予定のEVに関わるパラメータを以下の手順で特定する。
まず、消費電力量推定部15は、予約申請情報とドライバモデルパラメータ(図19参照)に基づいて、貸出予定のEVを借用するドライバと、そのドライバが属するグループを特定する。この特定により、消費電力量推定部15は、貸出予定のEVを借用するドライバに依存するドライバモデルパラメータを特定する。このドライバモデルパラメータは、例えばドライバの平均速度、平均アクセル加速度、平均ブレーキ加速度、加減速頻度などである。
予約申請情報を引数として受け取った消費電力量推定部15は、パラメータ知識格納部14bに格納されたパラメータのうち、貸出予定のEVに関わるパラメータを以下の手順で特定する。
まず、消費電力量推定部15は、予約申請情報とドライバモデルパラメータ(図19参照)に基づいて、貸出予定のEVを借用するドライバと、そのドライバが属するグループを特定する。この特定により、消費電力量推定部15は、貸出予定のEVを借用するドライバに依存するドライバモデルパラメータを特定する。このドライバモデルパラメータは、例えばドライバの平均速度、平均アクセル加速度、平均ブレーキ加速度、加減速頻度などである。
次に、消費電力量推定部15は、予約申請情報に記載された目的地に基づいて、貸出予定のEVの走行経路を推定する。消費電力量推定部15は、この推定した走行経路と道路モデルパラメータ(図17参照)とに基づいて、推定した走行経路の道路切片を推定する。これにより、消費電力量推定部15は、貸出予定のEVが走行する道路モデルパラメータ(制限速度、勾配など)を特定できる。
次に、消費電力量推定部15は、予約申請情報に記載された借用開始日時と借用終了日時と、道路モデルパラメータ(図17参照)と、交通情報モデルパラメータ(図20参照)に基づいて、貸出予定のEVの走行経路における渋滞情報を生成する。消費電力量推定部15は、この渋滞情報を用いて、前述のように特定したパラメータとしての、貸出予定のEVが走行する道路モデルパラメータ(制限速度など)を更新する。
次に、消費電力量推定部15は、予約申請情報に記載された借用開始日時と借用終了日時と、気象情報提供システムから得られる気象予報情報に基づいて、EVの貸出時点の気象情報のパラメータである、貸出予定のEVの貸出時における気温や天候を推定する。
貸出予定のEVの車種が決まると、消費電力量推定部15は、この車種と車両モデルパラメータ(図18参照)とに基づいて、貸出予定のEVに関わる車両モデルパラメータを特定する。
貸出予定のEVの車種が決まると、消費電力量推定部15は、この車種と車両モデルパラメータ(図18参照)とに基づいて、貸出予定のEVに関わる車両モデルパラメータを特定する。
消費電力量推定部15は、上述の手順で特定された、貸出予定のEVに関わるドライバモデル、道路モデル、車両モデル、気象情報のパラメータを用いて、図21に示した消費電力量推定アルゴリズムに従って、貸出予定のEVの消費電力量を推定する。
以上のように、第2の実施形態におけるEV走行消費電力量推定装置では、第1の実施形態で説明した特徴に加え、EVの貸出のための予約申請情報に基づいて、貸出予定のEVの貸出中における消費電力量を推定できる。
また、この予約申請情報は、貸出予定のEVの目的地の情報を含むので、第2の実施形態におけるEV走行消費電力量推定装置では、この情報と交通情報モデルパラメータとに基づいてEVの走行経路における渋滞情報を生成できる。よって、第1の実施形態と比較して道路モデルパラメータの精度を高める事ができる。
ここまでで発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
11…データ整形部、12…分析用データ格納部(記憶装置)、13…知識抽出部、14…知識格納部、14a…モデル知識格納部、14b…パラメータ知識格納部、15…消費電力量推定部、16…知識反映部、20…外部装置、20a…履歴データ格納部、20b…固定データ格納部、30…外部システム、40…気象情報提供システム。
Claims (6)
- 電気自動車の走行による電力消費に影響する情報を記憶する記憶装置(12)と、
前記記憶装置(12)に記憶される情報から、電力消費の傾向が類似する複数の電気自動車のそれぞれの消費電力量情報を抽出する抽出部(13)と、
前記抽出部(13)により抽出した情報に基づいた情報としての、前記電気自動車の走行による電力消費に影響する情報を用いて電気自動車が走行するための必要電力量を推定するためのパラメータに基づいて、前記電気自動車が走行するための必要電力量を推定する推定部(15)と
を備えたことを特徴とする消費電力量推定装置。 - 前記記憶装置(12)に記憶される情報は、
(a)複数の電気自動車のそれぞれのドライバに固有であって、前記電気自動車の走行による電力消費に影響する情報としてのドライバ情報、
(b)所定の日時における、所定区間の道路切片を通行する前記電気自動車の消費電力量を示す消費電力量情報、
(c)前記電気自動車の車種に固有であって、前記車種に属する電気自動車の走行による電力消費に影響する情報としての車両情報、および、
(d)前記所定区間の道路切片に固有であって、前記電気自動車の走行による電力消費に影響する情報としての道路情報
のうち少なくとも1つであることを特徴とする請求項1に記載の消費電力量推定装置。 - 前記抽出部(13)は、
(a)電力消費に関わる特性が類似する所定の車両グループに属する複数の前記電気自動車のそれぞれの車両モデルパラメータ情報、
(b)通行車両による電力消費に関わる特性が類似する所定の道路切片グループに属する道路切片を通行する複数の前記電気自動車のそれぞれの道路モデルパラメータ情報、および、
(c)ドライバによる電力消費に関わる特性が類似する所定のドライバグループに属するドライバに関わるドライバモデルパラメータ情報
のうち少なくとも1つを前記記憶装置(12)に記憶される情報から抽出し、
前記推定部(15)は、
(d)前記抽出部(13)により抽出した情報としての、電力消費に関わる特性が類似する所定の車両グループに属する複数の前記電気自動車のそれぞれの車両モデルパラメータ情報に基づいて、前記所定の車両グループに属する車両に関わる電気自動車が走行するための必要電力量を推定するためのパラメータ、
(e)前記抽出部(13)により抽出した情報としての、前記所定の道路切片グループに属する道路切片を通行する複数の前記電気自動車のそれぞれの道路モデルパラメータ情報に基づいて、前記所定の道路切片グループに属する道路切片に関わる電気自動車が走行するための必要電力量を推定するためのパラメータ、および、
(f)前記抽出部(13)により抽出した情報としての、前記所定のドライバグループに属するドライバに関わる電気自動車のドライバモデルパラメータ情報に基づいて、前記所定のドライバグループに属するドライバに関わる電気自動車が走行するための必要電力量を推定するためのパラメータ
のうち少なくとも1つに基づいて、前記電気自動車が走行するための必要電力量を推定することを特徴とする請求項1に記載の消費電力量推定装置。 - 前記記憶装置(12)は、
所定の日時における、前記電気自動車の通行箇所における前記電気自動車の走行による電力消費に影響する気象情報をさらに記憶し、
前記推定部(15)は、
(a)前記記憶装置(12)に記憶される情報としての、前記気象情報を含む情報、および
(b)前記必要電力量を推定するためのパラメータに基づいて、前記電力消費の傾向が類似する電気自動車が走行するための必要電力量を推定する
ことを特徴とする請求項1に記載の消費電力量推定装置。 - 前記電気自動車は、貸出予約のための申請に基づく貸出用の自動車であり、
前記記憶装置(12)は、
前記貸出予約ための申請がなされた電気自動車の目的地を示す情報をさらに記憶し、
前記推定部(15)は、
(a)前記目的地を示す情報に基づいて、前記貸出予約のための申請がなされた電気自動車の走行予定経路と関わる道路切片を推定し、
(b)前記抽出部(13)により抽出した消費電力量情報としての、通行車両による電力消費に関わる特性が類似する所定の道路切片グループに属する道路切片を通行する複数の前記電気自動車のそれぞれの消費電力量情報に基づいて、前記推定した消費電力量情報としての、前記貸出予約のための申請がなされた電気自動車の走行予定経路と関わる道路切片を通行する電気自動車としての、前記貸出予約のための申請がなされた電気自動車の消費電力量情報を取得し、
(c)前記取得した消費電力量情報に基づいた、前記所定の道路切片グループに属する道路切片に関わる道路情報を補うためのパラメータに基づいて、前記電気自動車が走行するための必要電力量を推定する
ことを特徴とする請求項1に記載の消費電力量推定装置。 - 前記記憶装置(12)は、
所定の日時に所定区間の道路切片を通行する前記電気自動車の走行による電力消費に影響する交通情報、および貸出予約のための申請がなされた電気自動車の貸出開始日時、貸出終了日時をさらに記憶し、
前記推定部(15)は、
(a)前記貸出開始日時、貸出終了日時、交通情報、および前記道路切片の推定結果に基づいて、前記走行予定経路における渋滞情報を推定し、
(b)前記推定した渋滞情報に基づいた、前記所定の道路切片グループに属する道路切片に関わる道路情報を補うためのパラメータに基づいて、前記電気自動車が走行するための必要電力量を推定する
ことを特徴とする請求項5に記載の消費電力量推定装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201380043435.8A CN104620274B (zh) | 2012-08-17 | 2013-08-19 | 消耗电力量推断装置 |
| EP13879373.2A EP2887304B1 (en) | 2012-08-17 | 2013-08-19 | Consumed power amount estimation apparatus |
| US14/622,351 US9682627B2 (en) | 2012-08-17 | 2015-02-13 | Consumed power amount estimation apparatus |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012-180866 | 2012-08-17 | ||
| JP2012180866A JP5840090B2 (ja) | 2012-08-17 | 2012-08-17 | 消費電力量推定装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US14/622,351 Continuation US9682627B2 (en) | 2012-08-17 | 2015-02-13 | Consumed power amount estimation apparatus |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2014027699A1 true WO2014027699A1 (ja) | 2014-02-20 |
Family
ID=50286297
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2013/072114 WO2014027699A1 (ja) | 2012-08-17 | 2013-08-19 | 消費電力量推定装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9682627B2 (ja) |
| EP (1) | EP2887304B1 (ja) |
| JP (1) | JP5840090B2 (ja) |
| CN (1) | CN104620274B (ja) |
| WO (1) | WO2014027699A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112991736A (zh) * | 2021-03-06 | 2021-06-18 | 南京效秀自动化技术有限公司 | 基于人工智能和物联网的电动公共交通汽车运营管理方法 |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102203242B1 (ko) * | 2013-12-16 | 2021-01-18 | 주식회사 케이티 | 영업용 전기차량과 고객 단말 사이의 양방향 정보 제공 서비스 시스템 및 방법 |
| JP6346483B2 (ja) * | 2014-03-27 | 2018-06-20 | 株式会社日本総合研究所 | 移動体群編成装置及びその方法 |
| JP6672589B2 (ja) * | 2015-02-02 | 2020-03-25 | トヨタ自動車株式会社 | 消費電力量予測装置、消費電力量予測方法、サーバ装置 |
| JP6502294B2 (ja) * | 2016-07-29 | 2019-04-17 | ダイムラー・アクチェンゲゼルシャフトDaimler AG | 電気トラックの走行ルート選定システム、電気トラックの走行ルート選定方法 |
| JP6804934B2 (ja) * | 2016-10-26 | 2020-12-23 | 株式会社東芝 | 消費エネルギー予測装置及び消費エネルギー予測方法 |
| US20180211349A1 (en) * | 2017-01-25 | 2018-07-26 | Lenovo (Singapore) Pte. Ltd. | Mobile device identification system and method |
| JP6544594B2 (ja) * | 2017-01-26 | 2019-07-17 | パナソニックIpマネジメント株式会社 | 情報処理システム、情報処理方法、プログラムおよび車両 |
| JP7163099B2 (ja) * | 2018-08-10 | 2022-10-31 | 株式会社東芝 | エネルギー管理装置、モデル管理方法及びコンピュータプログラム |
| CN109130866B (zh) * | 2018-08-27 | 2022-03-11 | 奇瑞汽车股份有限公司 | 一种新能源汽车驾驶数据上下电存储控制方法 |
| US11200757B2 (en) | 2019-08-16 | 2021-12-14 | Honda Motor Co., Ltd. | Systems and methods for range prediction |
| KR102317689B1 (ko) * | 2019-11-28 | 2021-10-26 | (주)디지파츠 | 차량 공유 네트워크를 이용한 통합 내비게이션 서비스 제공 방법 및 그를 위한 장치 및 시스템 |
| JP7259724B2 (ja) | 2019-12-06 | 2023-04-18 | トヨタ自動車株式会社 | 情報処理装置、情報処理システム、情報処理方法、及び情報処理プログラム |
| JP7035106B2 (ja) * | 2020-04-06 | 2022-03-14 | 株式会社東芝 | 電気自動車の走行支援装置及び走行支援方法 |
| KR20210150920A (ko) * | 2020-06-04 | 2021-12-13 | 현대모비스 주식회사 | 차량의 군집 주행 제어 시스템 및 방법 |
| CN112208338B (zh) * | 2020-09-29 | 2022-05-10 | 广州小鹏自动驾驶科技有限公司 | 一种目的地剩余续航里程计算方法和装置 |
| JP7454491B2 (ja) | 2020-12-25 | 2024-03-22 | 株式会社日立製作所 | 状態予測システム、状態予測方法、及びプログラム |
| JP2022181267A (ja) * | 2021-05-26 | 2022-12-08 | 株式会社日立製作所 | 計算システム、計算方法 |
| CN114435138B (zh) * | 2022-01-25 | 2023-10-17 | 中国第一汽车股份有限公司 | 一种车辆能耗预测方法、装置、车辆及存储介质 |
| CN116101087B (zh) * | 2023-03-10 | 2024-03-08 | 金彭车业无锡有限公司 | 一种电动车增程系统 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002350152A (ja) * | 2001-05-25 | 2002-12-04 | Mazda Motor Corp | 情報表示方法、該方法に用いる情報提供装置及び情報表示装置、該情報提供装置又は情報表示装置を制御するためのプログラム、並びに、該プログラムを記憶した記憶媒体 |
| JP2005184867A (ja) * | 2003-12-16 | 2005-07-07 | Equos Research Co Ltd | 走行速度パターン推定装置、及びハイブリッド車両の駆動制御装置 |
| JP2006115623A (ja) | 2004-10-15 | 2006-04-27 | Fuji Heavy Ind Ltd | 走行可能距離推定システム |
| JP2009031046A (ja) * | 2007-07-25 | 2009-02-12 | Hitachi Ltd | 自動車の燃料消費量推定システム、経路探索システム、及び運転指導システム |
| JP2009290940A (ja) * | 2008-05-27 | 2009-12-10 | Aisin Aw Co Ltd | 走行エネルギー学習装置、方法およびプログラム |
| JP2010197211A (ja) * | 2009-02-25 | 2010-09-09 | Xanavi Informatics Corp | サーバ装置、ナビゲーション装置、経路情報提示システムおよび経路情報提示方法 |
| JP2010210271A (ja) | 2009-03-06 | 2010-09-24 | Nissan Motor Co Ltd | ナビゲーション装置及び目的地到達可否判定方法 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6611755B1 (en) * | 1999-12-19 | 2003-08-26 | Trimble Navigation Ltd. | Vehicle tracking, communication and fleet management system |
| US8000938B2 (en) * | 2002-12-09 | 2011-08-16 | Verisae, Inc. | Method and system for tracking and managing destruction, reconstitution, or reclamation of regulated substances |
| JP2005035349A (ja) * | 2003-07-17 | 2005-02-10 | Toyota Motor Corp | 移動体エネルギー管理装置および移動体エネルギー管理方法 |
| US8972161B1 (en) * | 2005-11-17 | 2015-03-03 | Invent.Ly, Llc | Power management systems and devices |
| EP1898201A1 (en) * | 2006-09-08 | 2008-03-12 | Castrol Limited | Method for determining the performance of motor vehicle consumables |
| US9773222B2 (en) * | 2006-10-05 | 2017-09-26 | Trimble Inc. | Externally augmented asset management |
| US9747329B2 (en) * | 2006-10-05 | 2017-08-29 | Trimble Inc. | Limiting access to asset management information |
| JP4788643B2 (ja) * | 2007-04-23 | 2011-10-05 | 株式会社デンソー | ハイブリッド車両用の充放電制御装置および当該充放電制御装置用のプログラム |
| US11159909B2 (en) * | 2008-02-05 | 2021-10-26 | Victor Thomas Anderson | Wireless location establishing device |
| JP5027777B2 (ja) * | 2008-10-31 | 2012-09-19 | クラリオン株式会社 | カーナビゲーション装置およびカーナビゲーション方法 |
| JP5135308B2 (ja) * | 2009-09-09 | 2013-02-06 | クラリオン株式会社 | エネルギ消費量予測方法、エネルギ消費量予測装置および端末装置 |
| US20110184642A1 (en) * | 2009-12-18 | 2011-07-28 | Daimler Trucks North America Llc | Fuel efficient routing system and method |
| WO2011078136A1 (ja) * | 2009-12-21 | 2011-06-30 | 日本電気株式会社 | 行動提示装置、行動提示システム、行動提示プログラムを記録したコンピュータ読み取り可能な記録媒体、及び行動提示方法 |
| JP5771902B2 (ja) * | 2010-04-14 | 2015-09-02 | ソニー株式会社 | 経路案内装置、経路案内方法及びコンピュータプログラム |
| JP4905610B2 (ja) * | 2010-07-09 | 2012-03-28 | トヨタ自動車株式会社 | 情報提供装置 |
| JP5656624B2 (ja) * | 2010-12-28 | 2015-01-21 | 三菱重工業株式会社 | 道路交通流シミュレーション装置、道路交通流シミュレーションプログラム、及び道路交通流シミュレーション方法 |
| US8863256B1 (en) * | 2011-01-14 | 2014-10-14 | Cisco Technology, Inc. | System and method for enabling secure transactions using flexible identity management in a vehicular environment |
| JP5299494B2 (ja) * | 2011-02-09 | 2013-09-25 | 株式会社デンソー | 情報通信システム、車載装置、及びセンタ装置 |
| US8755993B2 (en) * | 2011-03-08 | 2014-06-17 | Navteq B.V. | Energy consumption profiling |
| US9505318B2 (en) * | 2011-05-26 | 2016-11-29 | Sierra Smart Systems, Llc | Electric vehicle fleet charging system |
| US9014888B2 (en) * | 2011-07-21 | 2015-04-21 | Saturna Green Systems Inc. | Vehicle communication, analysis and operation system |
| JP5803645B2 (ja) * | 2011-12-15 | 2015-11-04 | アイシン・エィ・ダブリュ株式会社 | 評価表示システム、方法およびプログラム |
| US10078811B2 (en) * | 2013-11-29 | 2018-09-18 | Fedex Corporate Services, Inc. | Determining node location based on context data in a wireless node network |
-
2012
- 2012-08-17 JP JP2012180866A patent/JP5840090B2/ja active Active
-
2013
- 2013-08-19 CN CN201380043435.8A patent/CN104620274B/zh active Active
- 2013-08-19 EP EP13879373.2A patent/EP2887304B1/en active Active
- 2013-08-19 WO PCT/JP2013/072114 patent/WO2014027699A1/ja active Application Filing
-
2015
- 2015-02-13 US US14/622,351 patent/US9682627B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002350152A (ja) * | 2001-05-25 | 2002-12-04 | Mazda Motor Corp | 情報表示方法、該方法に用いる情報提供装置及び情報表示装置、該情報提供装置又は情報表示装置を制御するためのプログラム、並びに、該プログラムを記憶した記憶媒体 |
| JP2005184867A (ja) * | 2003-12-16 | 2005-07-07 | Equos Research Co Ltd | 走行速度パターン推定装置、及びハイブリッド車両の駆動制御装置 |
| JP2006115623A (ja) | 2004-10-15 | 2006-04-27 | Fuji Heavy Ind Ltd | 走行可能距離推定システム |
| JP2009031046A (ja) * | 2007-07-25 | 2009-02-12 | Hitachi Ltd | 自動車の燃料消費量推定システム、経路探索システム、及び運転指導システム |
| JP2009290940A (ja) * | 2008-05-27 | 2009-12-10 | Aisin Aw Co Ltd | 走行エネルギー学習装置、方法およびプログラム |
| JP2010197211A (ja) * | 2009-02-25 | 2010-09-09 | Xanavi Informatics Corp | サーバ装置、ナビゲーション装置、経路情報提示システムおよび経路情報提示方法 |
| JP2010210271A (ja) | 2009-03-06 | 2010-09-24 | Nissan Motor Co Ltd | ナビゲーション装置及び目的地到達可否判定方法 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2887304A4 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112991736A (zh) * | 2021-03-06 | 2021-06-18 | 南京效秀自动化技术有限公司 | 基于人工智能和物联网的电动公共交通汽车运营管理方法 |
| CN112991736B (zh) * | 2021-03-06 | 2022-05-06 | 宁波公交通成科技有限公司 | 基于人工智能和物联网的电动公共交通汽车运营管理方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20150151637A1 (en) | 2015-06-04 |
| JP5840090B2 (ja) | 2016-01-06 |
| JP2014038047A (ja) | 2014-02-27 |
| EP2887304B1 (en) | 2023-08-02 |
| EP2887304A4 (en) | 2016-06-15 |
| CN104620274A (zh) | 2015-05-13 |
| US9682627B2 (en) | 2017-06-20 |
| CN104620274B (zh) | 2018-10-19 |
| EP2887304A1 (en) | 2015-06-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2014027699A1 (ja) | 消費電力量推定装置 | |
| CN105091892B (zh) | 车辆用能量管理装置 | |
| Wang et al. | Battery electric vehicle energy consumption prediction for a trip based on route information | |
| US20180202825A1 (en) | Apparatus and method for providing charging equipment information to vehicle | |
| US9170118B2 (en) | Navigation system for electric vehicle | |
| US9121722B1 (en) | Trip partitioning based on driving pattern energy consumption | |
| US8428804B2 (en) | In-vehicle charge and discharge control apparatus and partial control apparatus | |
| US11443563B2 (en) | Driving range based on past and future data | |
| CN104627185A (zh) | 车辆用能量管理装置 | |
| CN103839423A (zh) | 环境感知的再生制动能量计算方法 | |
| CN105383304A (zh) | 使用能量消耗数据划分估计可用行驶距离的系统和方法 | |
| CN106660457B (zh) | 电力管理装置、电力管理系统以及汽车 | |
| JP2020135038A (ja) | 情報処理装置、情報処理方法、及び情報処理プログラム | |
| US20190176656A1 (en) | Apparatus and method for determining vehicle performance factors | |
| Jung et al. | Shared-taxi operations with electric vehicles | |
| Perugu et al. | Characterization of battery electric transit bus energy consumption by temporal and speed variation | |
| Chau et al. | Fuel minimization of plug-in hybrid electric vehicles by optimizing drive mode selection | |
| Tseng et al. | A participatory sensing approach for personalized distance-to-empty prediction and green telematics | |
| Yano et al. | Estimation of ev power consumption and route planning using probe data | |
| Tseng et al. | Viability analysis of electric taxis using New York city dataset | |
| Haddad et al. | Energy and emission modelling for climate change mitigation from road transportation in the middle east: A case study from Lebanon | |
| Kang et al. | Velocity optimization of pure electric vehicles with traffic dynamics and driving safety considerations | |
| Chen et al. | Agent-based simulation model for electric vehicle long-distance trips in the state of Indiana | |
| JP6447792B1 (ja) | 制御計画作成装置、制御計画作成方法及び制御計画作成システム | |
| Neves | Towards the Electrification of Taxi Fleets |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 13879373 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2013879373 Country of ref document: EP |