WO2014010582A1 - 磁気式荷重センサおよび電動ブレーキ装置 - Google Patents
磁気式荷重センサおよび電動ブレーキ装置 Download PDFInfo
- Publication number
- WO2014010582A1 WO2014010582A1 PCT/JP2013/068724 JP2013068724W WO2014010582A1 WO 2014010582 A1 WO2014010582 A1 WO 2014010582A1 JP 2013068724 W JP2013068724 W JP 2013068724W WO 2014010582 A1 WO2014010582 A1 WO 2014010582A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- magnetic
- load
- flange member
- sensor
- axial direction
- Prior art date
Links
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/12—Measuring force or stress, in general by measuring variations in the magnetic properties of materials resulting from the application of stress
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D55/00—Brakes with substantially-radial braking surfaces pressed together in axial direction, e.g. disc brakes
- F16D55/02—Brakes with substantially-radial braking surfaces pressed together in axial direction, e.g. disc brakes with axially-movable discs or pads pressed against axially-located rotating members
- F16D55/22—Brakes with substantially-radial braking surfaces pressed together in axial direction, e.g. disc brakes with axially-movable discs or pads pressed against axially-located rotating members by clamping an axially-located rotating disc between movable braking members, e.g. movable brake discs or brake pads
- F16D55/224—Brakes with substantially-radial braking surfaces pressed together in axial direction, e.g. disc brakes with axially-movable discs or pads pressed against axially-located rotating members by clamping an axially-located rotating disc between movable braking members, e.g. movable brake discs or brake pads with a common actuating member for the braking members
- F16D55/225—Brakes with substantially-radial braking surfaces pressed together in axial direction, e.g. disc brakes with axially-movable discs or pads pressed against axially-located rotating members by clamping an axially-located rotating disc between movable braking members, e.g. movable brake discs or brake pads with a common actuating member for the braking members the braking members being brake pads
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D65/00—Parts or details
- F16D65/14—Actuating mechanisms for brakes; Means for initiating operation at a predetermined position
- F16D65/16—Actuating mechanisms for brakes; Means for initiating operation at a predetermined position arranged in or on the brake
- F16D65/18—Actuating mechanisms for brakes; Means for initiating operation at a predetermined position arranged in or on the brake adapted for drawing members together, e.g. for disc brakes
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D66/00—Arrangements for monitoring working conditions, e.g. wear, temperature
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/12—Measuring force or stress, in general by measuring variations in the magnetic properties of materials resulting from the application of stress
- G01L1/122—Measuring force or stress, in general by measuring variations in the magnetic properties of materials resulting from the application of stress by using permanent magnets
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/0028—Force sensors associated with force applying means
- G01L5/0038—Force sensors associated with force applying means applying a pushing force
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/12—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring axial thrust in a rotary shaft, e.g. of propulsion plants
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/22—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for measuring the force applied to control members, e.g. control members of vehicles, triggers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/28—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes for testing brakes
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D66/00—Arrangements for monitoring working conditions, e.g. wear, temperature
- F16D2066/005—Force, torque, stress or strain
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2121/00—Type of actuator operation force
- F16D2121/18—Electric or magnetic
- F16D2121/24—Electric or magnetic using motors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D2125/00—Components of actuators
- F16D2125/18—Mechanical mechanisms
- F16D2125/44—Mechanical mechanisms transmitting rotation
- F16D2125/46—Rotating members in mutual engagement
- F16D2125/50—Rotating members in mutual engagement with parallel non-stationary axes, e.g. planetary gearing
Definitions
- the present invention relates to a magnetic load sensor and an electric brake device using the magnetic load sensor.
- An electric brake device generally converts the rotation of an electric motor into axial movement of a friction pad, and presses the friction pad against a brake disk to generate a braking force.
- electric brake devices In order to control this braking force to a desired magnitude, electric brake devices often incorporate a load sensor in a portion that receives a reaction force of a load applied to a friction pad.
- the load applied to the load sensor (that is, the load applied to the friction pad) is about 30 kN at the maximum, and a load sensor that detects the load with a minute displacement is used to improve the response of the electric brake.
- Patent Document 1 As a load sensor for detecting such a large load with a minute displacement, for example, a sensor described in Patent Document 1 below is known.
- the load sensor disclosed in Patent Literature 1 is electrically connected between a pair of opposed annular plate-shaped pressing plates, a quartz crystal piezoelectric element sandwiched between the pair of pressing plates, and the quartz piezoelectric element and the pressing plate on one side. It consists of an insulating plate for insulation and a lead wire for taking out the voltage generated by the crystal piezoelectric element.
- this load sensor directly receives the input load by the crystal piezoelectric element, there is a possibility that the crystal piezoelectric element may be cracked or chipped when an impact load or a load oblique to the axial direction is applied.
- the load also acts on the insulating plate that electrically insulates between the piezoelectric element and one pressing plate, high durability is required for the insulating plate, but durability is ensured with inexpensive insulating plates such as resin. It was difficult to do.
- the inventor of the present invention has studied a load sensor that can detect a large load with a small displacement and has excellent durability, and developed such a load sensor as shown in FIG. .
- a load sensor 80 shown in FIG. 15 includes a flange member 2, a support member 3, a magnetic target 4, and a magnetic sensor 5.
- the flange member 2 is supported by the support member 3 from the rear in the axial direction at a position shifted radially outward from the load input position so as to bend when a load is input from the front in the axial direction.
- the magnetic target 4 is fixed to the flange member 2.
- the magnetic sensor 5 is fixed to the support member 3 so as to detect the magnetic flux generated by the magnetic target 4.
- the load sensor 80 when a load is input to the flange member 2 from the front in the axial direction, the magnetic target 4 and the magnetic sensor 5 are relatively displaced by the deflection of the flange member 2, and the relative displacement between the magnetic target 4 and the magnetic sensor 5 is detected. Since the output signal of the magnetic sensor 5 changes in response to this, the magnitude of the load can be detected based on the output signal of the magnetic sensor 5.
- the load acts on the flange member 2 to bend the flange member 2, but does not act on the magnetic sensor 5. For this reason, even when an impact load or a load oblique to the axial direction is applied, it is difficult to fail and high durability can be ensured.
- the inventor of the present application actually made a prototype of the load sensor shown in FIG. 15 and conducted a test to detect the axial load of the electric brake device with the load sensor.
- the load increased that is, the deflection of the flange member 2 increased. It has been found that a hysteresis error occurs between when the load is reduced and when the deflection of the flange member 2 is reduced.
- the problem to be solved by the present invention is to provide a load sensor in which a hysteresis error hardly occurs.
- the inventor of the present application analyzed the radial displacement generated in each part of the flange member 2 when an axial load was input from the front in the axial direction to the flange member 2 shown in FIG.
- the axial front surface of the flange member 2 is displaced radially inward
- the axial rear surface of the flange member 2 is displaced radially outward, but between the axial front surface and the axial rear surface of the flange member 2.
- the part that is, the intermediate part in the axial direction
- a flange member that generates a deflection when a load is input from the front in the axial direction, and a support that supports the flange member from the rear in the axial direction at a position shifted in the radial direction from the input position of the load.
- a magnetic target that generates a magnetic flux, and a magnetic sensor that detects the magnetic flux generated by the magnetic target, and the magnetic target and the magnetic sensor have a flange member when a load is input to the flange member.
- One of the magnetic target and the magnetic sensor is fixed to the flange member and the other is fixed to the support member so that the magnetic target and the magnetic sensor are displaced relative to each other by the deflection of the magnetic target, and based on the magnetic flux detected by the magnetic sensor Load acting surface to which the load of the flange member is input as a magnetic load sensor for detecting the magnitude of the load
- a magnetic load sensor formed in a position offset axially rearwardly relative to the axial direction toward the front of the support is in part supported by a support member of the flange member.
- the load acting surface of the flange member is offset axially rearward with respect to the front surface in the axial direction of the flange member, the radial displacement of the load acting surface when the flange member bends is suppressed to be small. Can do. Therefore, the slip of the load acting surface when a load is input to the flange member is reduced, and a hysteresis error due to the slip of the load acting surface can be prevented.
- the supported surface supported by the supporting member of the flange member is formed at a position offset forward in the axial direction with respect to the axial rear surface of the portion of the flange member where the load is input.
- the supported surface of the flange member is offset forward in the axial direction with respect to the rear surface in the axial direction of the flange member, so that the radial displacement of the supported surface when the flange member bends is also kept small. Can do. Therefore, the slip of the supported surface when a load is input to the flange member is reduced, and a hysteresis error due to the slip of the supported surface can be prevented.
- the load acting surface to which the load of the flange member is input and the front surface in the axial direction of the portion supported by the support member of the flange member can be two flat surfaces connected via a step.
- a corner R portion having an arcuate cross section is formed between the load acting surface of the flange member and the step on the front side of the flange member, the flange is formed when a load is input to the flange member.
- the tensile stress can be prevented from concentrating at the position where the load acting surface of the member and the step intersect, and the durability of the flange member can be ensured.
- the supported surface supported by the supporting member of the flange member and the rear surface in the axial direction of the portion of the flange member where the load is input can be two flat surfaces connected via a step.
- a stealing groove having an arc-shaped cross section is formed at a position where a supported surface of the flange member and a step on the rear surface side of the flange member intersect, when the load is input to the flange member, the flange member It is possible to prevent the compressive stress from concentrating at a position where the level difference between the supported surface and the level difference, and to ensure the durability of the flange member.
- the load acting surface to which the load of the flange member is input and the supported surface of the flange member supported by the support member are formed so as to be positioned on the same plane, the load is input to the flange member. It is possible to extremely effectively reduce the sliding of the load acting surface and the sliding of the supported surface.
- the same plane does not require that the load acting surface and the supported surface of the flange member are on the same plane in a mathematically exact sense, and the load acting surface and the supported surface are This means that the flange member is present in an imaginary planar region having a thickness of about 10% of the thickness of the portion to which the load of the flange member is input.
- the magnetic target one in which a plurality of permanent magnets having a magnetization direction in a direction orthogonal to the axial direction, which is a relative displacement direction in the axial direction of the magnetic target and the magnetic sensor, are arranged in the axial direction is adopted. It is preferable to arrange the magnetic sensor in the vicinity of the boundary between the adjacent magnetic poles.
- the output signal of the magnetic sensor changes sharply with respect to the relative displacement in the axial direction of the magnetic target and the magnetic sensor, while it does not change much with respect to the relative displacement in directions other than the axial direction. Indicates directionality. Therefore, the output signal of the magnetic sensor is hardly affected by external vibration, and the magnitude of the load can be detected with stable accuracy.
- the support member is formed on the outer diameter side of the support portion so as to be fitted to the outer periphery of the flange member with a tightening margin with an annular support portion that supports an axial rear surface of the outer diameter side end portion of the flange member. It can be set as the structure which has the fitted cylinder part made. In this case, since the flange member is integrated with the support member, the handling of the magnetic load sensor is facilitated, and a tightening margin is set between the fitting tube portion and the flange member. When bending, slippage hardly occurs between the fitting tube portion and the flange member, and a hysteresis error due to slippage between the fitting tube portion and the fitting surface of the flange member can be prevented.
- an electric brake device provided with the magnetic load sensor is provided.
- the load acting surface of the flange member is offset axially rearward with respect to the axial front surface of the flange member, the radial displacement of the load acting surface when the flange member bends. Can be kept small. Therefore, when a load is input to the flange member, a hysteresis error due to slippage of the load acting surface hardly occurs.
- Sectional drawing which shows the magnetic type load sensor of 1st Embodiment of this invention
- Left side view of the magnetic load sensor shown in FIG. 1 is an enlarged cross-sectional view of the vicinity of the magnetic target of the magnetic load sensor shown in FIG.
- FIG. 2 is an enlarged sectional view showing an example in which the arrangement of the magnetic target and the magnetic sensor shown in FIG. 2 is changed.
- FIG. 2 is an enlarged sectional view showing another example of the magnetic load sensor shown in FIG.
- Sectional drawing which shows the electric brake device using the magnetic type load sensor shown in FIG. Fig. 6 is an enlarged cross-sectional view near the linear actuator.
- Sectional view along line VIII-VIII in FIG. Sectional drawing which shows the electric brake device which uses the ball screw mechanism instead of the planetary roller mechanism shown in FIG.
- Sectional drawing which shows the electric brake device which uses the ball ramp mechanism instead of the planetary roller mechanism shown in FIG.
- Sectional view along line XI-XI in FIG. 11A is a view showing the relationship between the ball and the inclined groove shown in FIG. 11, and
- FIG. 11B is a view showing a state in which the rotation disk and the linear motion disk are relatively rotated from the state shown in FIG.
- Figure Sectional drawing which shows the magnetic type load sensor of 2nd Embodiment of this invention Sectional drawing which shows the electric brake device using the magnetic type load sensor shown in FIG.
- Sectional drawing which shows the magnetic type load sensor of a comparative example is a figure which shows the result of having analyzed the radial displacement which arises in each site
- (b) is a figure which shows the result in FIG. The figure which shows the result of having analyzed the radial displacement which arises in each site
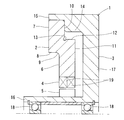
- the magnetic load sensor 1 includes a flange member 2 that generates a deflection when a load is input from the front in the axial direction, a support member 3 that supports the flange member 2 from the rear in the axial direction, a magnetic target 4 that generates magnetic flux, The magnetic sensor 5 detects the magnetic flux generated by the target 4.
- the flange member 2 is a ring-shaped member formed of a metal such as iron.
- a load acting surface 6 On the front surface in the axial direction of the inner diameter side portion of the flange member 2, a load acting surface 6 to which a load is input is formed.
- the load acting surface 6 is a plane perpendicular to the axial direction, and is formed at a position offset axially rearward with respect to the axial front surface 7 of the portion supported by the support member 3 of the flange member 2. Due to this offset, the load acting surface 6 is arranged in a region between the front end and the rear end in the axial direction of the flange member 2 (an intermediate region in the axial direction of the flange member 2).
- the load acting surface 6 and the axial front surface 7 of the portion of the flange member 2 supported by the support member 3 are connected via a step 8.
- a corner R portion 9 having an arcuate cross section that smoothly connects the both is formed. This corner R portion 9 prevents concentration of tensile stress at a position where the load acting surface 6 of the flange member 2 and the step 8 intersect when an axial load is input to the flange member 2 from the front in the axial direction.
- the durability of the flange member 2 is ensured.
- a supported surface 10 supported by the support member 3 is formed on the rear surface in the axial direction of the outer diameter side portion of the flange member 2.
- the supported surface 10 is a plane perpendicular to the axial direction, and is formed at a position that is offset forward in the axial direction with respect to the axial rear surface 11 of the portion to which the load of the flange member 2 is input. Due to this offset, the supported surface 10 is disposed in a region between the axial front end and the rear end of the flange member 2 (an intermediate region in the axial direction of the flange member 2).
- the supported surface 10 and the axial rear surface 11 of the portion where the load of the flange member 2 is input are connected via a step 12.
- a stealing groove 13 having an arc-shaped cross section and extending in the circumferential direction is formed at a position where the supported surface 10 and the step 12 intersect.
- the stealing groove 13 prevents compressive stress from being concentrated at a position where the supported surface 10 of the flange member 2 and the step 12 intersect when an axial load is input to the flange member 2 from the front in the axial direction.
- the durability of the flange member 2 is ensured.
- the support member 3 is made of the same metal as the flange member 2.
- the support member 3 is formed on the outer diameter side of the support portion 14 so as to be fitted to the outer periphery of the flange member 2 and an annular support portion 14 that supports the axial rear surface 11 of the outer diameter side end portion of the flange member 2.
- the fitting cylinder portion 15, the cylindrical portion 16 provided so as to face the inner diameter side of the flange member 2, and the connecting portion 17 that connects the cylindrical portion 16 and the support portion 14 in the axially rearward direction of the flange member 2. And have.
- the support portion 14 of the support member 3 supports the flange member 2 at a position shifted radially outward from the input position of the load to the flange member 2 (that is, the load acting surface 6).
- the flange member 2 is configured such that the inner diameter side portion bends rearward in the axial direction with the position of the supported surface 10 as a fulcrum when a load is input.
- a tightening margin is set between the inner periphery of the fitting tube portion 15 and the outer periphery of the flange member 2.
- the magnetic target 4 is fixed to the inner periphery of the flange member 2.
- the magnetic sensor 5 is fixed to the outer periphery of the cylindrical portion 16 of the support member 3 so as to face the magnetic target 4 in the radial direction.
- a plurality of bearings 18 are mounted on the inner periphery of the cylindrical portion 16 at intervals in the axial direction.
- the magnetic target 4 includes two permanent magnets 19 having a magnetization direction in a direction (radial direction in this case) orthogonal to an axial direction that is a relative displacement direction of the magnetic target 4 and the magnetic sensor 5 due to the deflection of the flange member 2.
- the two permanent magnets 19 are adjacent to each other such that magnetic poles having opposite polarities to the respective permanent magnets 19 (that is, the N pole of one permanent magnet 19 and the S pole of the other permanent magnet 19) are aligned in the axial direction. Are arranged.
- a neodymium magnet is used as the permanent magnet 19
- a powerful magnetic flux can be generated in a space-saving manner. May be.
- a samarium cobalt magnet, a samarium iron nitride magnet, or an alnico magnet is used, a decrease in magnetic flux accompanying a temperature increase of the permanent magnet 19 can be suppressed.
- a praseodymium magnet is used, the mechanical strength of the permanent magnet 19 can be improved.
- the magnetic sensor 5 is disposed in the vicinity of the boundary between adjacent magnetic poles of the two permanent magnets 19 so as to face the magnetic target 4 in the axis orthogonal direction (radial direction in the drawing).
- MR sensor magnetoresistive element
- MI sensor magneto-impedance element
- using a Hall IC is advantageous in terms of cost and has a heat resistance. Since a high Hall IC is commercially available, it is suitable for electric brake applications.
- the magnetic load sensor 1 causes the flange member 2 to move to the outer diameter side end by the axial load.
- the magnetic target 4 and the magnetic sensor 5 are displaced relative to each other in the axial direction, and the output signal of the magnetic sensor 5 is changed according to the relative displacement between the magnetic target 4 and the magnetic sensor 5.
- Change. Therefore, the axial direction applied to the flange member 2 based on the output signal of the magnetic sensor 5 by grasping in advance the relationship between the magnitude of the axial load input to the flange member 2 and the output signal of the magnetic sensor 5. The magnitude of the load can be detected.
- the relative change amount between the magnetic target 4 and the magnetic sensor 5 when an axial load is input to the magnetic load sensor 1 is extremely small.
- a maximum axial load of 30 kN is input to the magnetic load sensor 1, and the magnetic target 4 and the magnetic sensor 5 at this time
- the relative change in the axial direction is about 0.4 mm.
- the magnetic load sensor 1 is arranged at the boundary between the N pole and the S pole. In the vicinity of the magnetic sensor 5, the magnetic flux intersecting in the axial direction exists at a high density.
- the output signal of the magnetic sensor 5 changes sharply with respect to a slight relative displacement in the axial direction between the magnetic target 4 and the magnetic sensor 5. Therefore, although the relative displacement between the magnetic target 4 and the magnetic sensor 5 is extremely small, the magnitude of the axial load acting on the flange member 2 can be detected.
- FIG. 15 shows a magnetic load sensor 80 of a comparative example for the above embodiment.
- the load acting surface 6 of the flange member 2 is not offset with respect to the axial front surface 7 of the flange member 2, and there is no step 8 on the front surface side of the flange member 2.
- the supported surface 10 of the flange member 2 is not offset with respect to the axial rear surface 11 of the flange member 2, and there is no step 12 on the rear surface side of the flange member 2.
- Other configurations are the same as those in the above embodiment.
- FIG. 16A shows the result of analyzing the radial displacement generated in each part of the flange member 2 when an axial load is input from the front in the axial direction to the flange member 2 of the magnetic load sensor 1 of the above embodiment. Shown in (b). This analysis was performed on a 1/36 cut model of the flange member 2.
- the reason why the radial displacement of the load acting surface 6 and the supported surface 10 can be suppressed to be small is considered as follows. That is, when an axial load is inputted to the flange member 2 from the front in the axial direction, the axial front surface 7 of the flange member 2 is displaced radially inward as shown in FIG. Although the direction rear surface 11 is displaced radially outward, the portion between the axial front surface 7 and the axial rear surface 11 of the flange member 2 is hardly displaced in the radial direction. Since the load acting surface 6 and the supported surface 10 are disposed between the axial front surface 7 and the axial rear surface 11 of the flange member 2, the radial displacement of the load acting surface 6 and the supported surface 10 is achieved. Is considered to be small.
- the load acting surface 6 of the flange member 2 is offset rearward in the axial direction with respect to the axial front surface 7 of the flange member 2.
- the displacement in the radial direction of the load acting surface 6 when bending can be suppressed. Therefore, the slip of the load acting surface 6 when a load is input to the flange member 2 is reduced.
- the load increases (that is, when the deflection of the flange member 2 increases) and when the load decreases (that is, the flange member 2) It is possible to prevent a hysteresis error due to slippage of the load acting surface 6 during the time when the deflection is reduced.
- the supported surface 10 of the flange member 2 is offset forward in the axial direction with respect to the axial rear surface 11 of the flange member 2, so the supported surface when the flange member 2 bends.
- the radial displacement of 10 can also be kept small. Therefore, the slip of the supported surface 10 when a load is input to the flange member 2 is reduced, and as a result, it is possible to prevent a hysteresis error due to the slip of the supported surface 10 between the load increase and the load decrease. it can.
- the magnetic load sensor 1 acts on the flange member 2 to bend the flange member 2 but does not act on the magnetic sensor 5. Therefore, even if an impact load or a load oblique to the axial direction is applied, the magnetic sensor 5 is unlikely to fail and high durability can be ensured.
- the flange member 2 and the support member 3 are formed of a material having the same linear expansion coefficient, the flange member 2 and the support member 3 have the same ratio when the temperature rises. Thermal expansion. For this reason, relative displacement between the magnetic target 4 and the magnetic sensor 5 due to temperature change is unlikely to occur, and errors due to temperature change are unlikely to occur.
- the magnetic target 4 is fixed to the flange member 2 and the magnetic sensor 5 is fixed to the support member 3.
- the relationship between the magnetic target 4 and the magnetic sensor 5 may be reversed. That is, as shown in FIG. 4, the magnetic sensor 5 may be fixed to the flange member 2 and the magnetic target 4 may be fixed to the support member 3.
- the load acting surface 6 and the supported surface 10 of the flange member 2 are formed so as to be positioned on the same plane. If it does in this way, it will become possible to reduce effectively the slip of the load action surface 6 when a load is input into the flange member 2, and the slip of the supported surface 10.
- the term “on the same plane” means that the load acting surface 6 and the supported surface 10 of the flange member 2 do not need to be on the same plane in a mathematically strict sense, and the load acting surface 6 and the supported surface are supported. It means that the surface 10 exists in a virtual planar region having a thickness of about 10% of the thickness of the portion to which the load of the flange member 2 is input.
- the load acting surface 6 and the supported surface 10 of the flange member 2 are disposed at an intermediate position that is equidistant from both the axial front surface 7 and the axial rear surface 11 of the flange member 2.
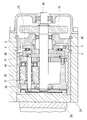
- 6 to 8 show an electric brake device for a vehicle using the magnetic load sensor 1 described above.
- the electric brake device includes a caliper body 25 having a shape in which opposed pieces 22 and 23 facing each other with a bridge 24 interposed therebetween with a brake disc 21 rotating integrally with a wheel, and a facing surface of the opposed piece 23 to the brake disc 21.
- the linear motion actuator 27 is incorporated in the accommodation hole 26 that opens to the left and the left and right friction pads 28 and 29.
- the friction pad 28 is provided between the opposing piece 23 and the brake disk 21 and is supported by a pad pin (not shown) attached to the caliper body 25 so as to be movable in the axial direction of the brake disk 21.
- the other friction pad 29 is attached to the opposing piece 22 on the opposite side.
- the caliper body 25 is supported so as to be slidable in the axial direction of the brake disc 21.
- the linear actuator 27 includes a rotating shaft 30, a plurality of planetary rollers 31 that are in rolling contact with the outer peripheral cylindrical surface of the rotating shaft 30, and an outer ring disposed so as to surround these planetary rollers 31. It has the member 32, the carrier 33 which hold
- the rotary shaft 30 is rotationally driven by the rotation of the electric motor 34 shown in FIG.
- the rotating shaft 30 is inserted into the receiving hole 26 with one end protruding from an opening on the rear side in the axial direction of the receiving hole 26 formed through the opposing piece 23 in the axial direction, and is inserted into the protruding portion from the receiving hole 26.
- the gear 35 is spline-fitted to prevent rotation.
- the gear 35 is covered with a lid 37 fixed with a bolt 36 so as to close the opening on the rear side in the axial direction of the accommodation hole 26.
- the lid 37 incorporates a bearing 38 that rotatably supports the rotary shaft 30.
- the planetary roller 31 is in rolling contact with the outer peripheral cylindrical surface of the rotating shaft 30, and the planetary roller 31 is caused by friction between the planetary roller 31 and the rotating shaft 30 when the rotating shaft 30 rotates. Also comes to rotate.
- a plurality of planetary rollers 31 are provided at regular intervals in the circumferential direction.
- the outer ring member 32 is accommodated in an accommodation hole 26 provided in the facing piece 23 of the caliper body 25, and is supported so as to be slidable in the axial direction on the inner periphery of the accommodation hole 26.
- An engagement recess 40 is formed at the front end in the axial direction of the outer ring member 32 to engage with an engagement protrusion 39 formed on the back surface of the friction pad 28. The engagement protrusion 39 and the engagement recess 40 are engaged with each other. Thus, the outer ring member 32 is prevented from rotating with respect to the caliper body 25.
- a spiral ridge 41 is provided on the inner periphery of the outer ring member 32, and a circumferential groove 42 that engages with the spiral ridge 41 is provided on the outer periphery of the planetary roller 31, so that the planetary roller 31 rotates.
- the spiral protrusion 41 of the outer ring member 32 is guided by the circumferential groove 42 so that the outer ring member 32 moves in the axial direction.
- the circumferential groove 42 having a lead angle of 0 degrees is provided on the outer periphery of the planetary roller 31, but a spiral groove having a lead angle different from that of the spiral protrusion 41 may be provided instead of the circumferential groove 42.
- the carrier 33 includes a carrier pin 33A that rotatably supports the planetary roller 31, an annular carrier plate 33B that maintains a constant circumferential interval at the front end in the axial direction of each carrier pin 33A, and an axial direction of each carrier pin 33A. And an annular carrier body 33C that maintains a constant circumferential interval at the rear end.
- the carrier plate 33B and the carrier main body 33C face the planetary roller 31 in the axial direction, and are connected via a connecting rod 43 disposed between the planetary rollers 31 adjacent in the circumferential direction.
- the carrier body 33 ⁇ / b> C is supported by the rotary shaft 30 via the slide bearing 44 and is rotatable relative to the rotary shaft 30.
- a thrust bearing 45 for interrupting transmission of rotation of the planetary roller 31 to the carrier main body 33C is incorporated.
- Each carrier pin 33A is urged radially inward by a reduced diameter ring spring 46 mounted so as to circumscribe a plurality of carrier pins 33A arranged at intervals in the circumferential direction. Due to the urging force of the reduced diameter ring spring 46, the outer periphery of the planetary roller 31 is pressed against the outer periphery of the rotating shaft 30, and slippage between the rotating shaft 30 and the planetary roller 31 is prevented. In order to apply the urging force of the reduced diameter ring spring 46 over the entire axial length of the planetary roller 31, reduced diameter ring springs 46 are provided at both ends of the carrier pin 33A.
- the magnetic load sensor 1 is fitted in the accommodation hole 26 in the direction in which the support member 3 is positioned behind the flange member 2 in the axial direction.
- a spacer 47 that revolves integrally with the carrier 33 and a thrust bearing 48 that transmits an axial load between the spacer 47 and the magnetic load sensor 1 are incorporated between the carrier 33 and the magnetic load sensor 1.
- the thrust bearing 48 is provided so as to contact the load acting surface 6 of the flange member 2, and an axial load is input from the spacer 47 to the load acting surface 6 of the flange member 2 through the thrust bearing 48. It is like that.
- a rotary shaft 30 is rotatably supported by a bearing 18 incorporated in the cylindrical portion 16 of the support member 3.
- the magnetic load sensor 1 is restricted from moving rearward in the axial direction by locking the outer peripheral edge of the support member 3 with a retaining ring 49 attached to the inner periphery of the accommodation hole 26.
- the magnetic load sensor 1 supports the carrier body 33 ⁇ / b> C in the axial direction via the spacer 47 and the thrust bearing 48, thereby restricting the movement of the carrier 33 in the rearward direction in the axial direction.
- the carrier 33 is also restricted from moving forward in the axial direction by a retaining ring 50 attached to the front end of the rotating shaft 30 in the axial direction. Therefore, the movement of the carrier 33 in both the axial front and the axial rear is restricted, and the planetary roller 31 held by the carrier 33 is also restricted in the axial movement.
- the rotating shaft 30 rotates, and the planetary roller 31 revolves around the rotating shaft 30 while rotating around the carrier pin 33A.
- the outer ring member 32 and the planetary roller 31 move relative to each other in the axial direction due to the engagement between the spiral ridge 41 and the circumferential groove 42, but the planetary roller 31 is restricted from moving in the axial direction together with the carrier 33.
- the roller 31 does not move in the axial direction, and the outer ring member 32 moves in the axial direction.
- the linear actuator 27 converts the rotation of the rotary shaft 30 driven by the electric motor 34 into the axial movement of the outer ring member 32, and applies an axial load to the friction pad 28 by the outer ring member 32.
- the friction pad 28 is pressed against the brake disc 21 to generate a braking force.
- this electric brake device as a linear motion mechanism that converts the rotation of the rotating shaft 30 into the axial movement of the outer ring member 32, a plurality of planetary rollers 31 that are in rolling contact with the outer peripheral cylindrical surface of the rotating shaft 30 and the planetary rollers 31 are provided.
- a carrier 33 that is capable of rotating and revolving and that is restricted from moving in the axial direction, an outer ring member 32 that is disposed so as to surround a plurality of planetary rollers 31, and a spiral ridge provided on the inner periphery of the outer ring member 32 41 and a planetary roller 31 mechanism comprising a spiral groove or a circumferential groove 42 provided on the outer periphery of each planetary roller 31 so as to engage with the spiral ridge 41, but a linear motion of another configuration
- the magnetic load sensor 1 can also be incorporated into an electric brake device that employs a mechanism.
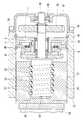
- FIG. 9 shows an example of an electric brake device that employs a ball screw mechanism as a linear motion mechanism.
- a ball screw mechanism as a linear motion mechanism.
- the linear actuator 27 is formed on the outer periphery of the rotating shaft 30, a screw shaft 51 provided integrally with the rotating shaft 30, a nut 52 provided so as to surround the screw shaft 51, and the screw shaft 51.
- a plurality of balls 55 incorporated between the formed screw groove 53 and the screw groove 54 formed on the inner periphery of the nut 52, and a return tube (not shown) for returning the balls 55 from the end point of the screw groove 54 of the nut 52 to the starting point.
- the magnetic load sensor 1 is disposed behind the nut 52 in the axial direction.
- the nut 52 is accommodated in the accommodation hole 26 provided in the facing piece 23 so as to be slidable in the axial direction while being prevented from rotating with respect to the caliper body 25.
- a spacer 47 that rotates integrally with the screw shaft 51 is provided at the rear end in the axial direction of the screw shaft 51, and the spacer 47 is supported by the magnetic load sensor 1 via a thrust bearing 48.
- the magnetic load sensor 1 supports the nut 52 in the axial direction via the spacer 47, the thrust bearing 48, and the screw shaft 51, thereby restricting the movement of the nut 52 in the axial rearward direction. .
- This electric brake device rotates the rotating shaft 30 to rotate the screw shaft 51 and the nut 52 relative to each other, and moves the nut 52 forward in the axial direction to apply an axial load to the friction pad 28.
- a reaction force acting rearward in the axial direction acts on the screw shaft 51, and the reaction force is received by the magnetic load sensor 1 via the spacer 47 and the thrust bearing 48.
- the flange member 2 of the magnetic load sensor 1 bends rearward in the axial direction, and the magnetic target 4 and the magnetic sensor 5 are relatively displaced.
- the output signal of the magnetic sensor 5 changes according to the magnitude of the axial load applied to the friction pad 28, and the magnitude of the axial load is based on the output signal of the magnetic sensor 5. (Pressing force of the friction pad 28) can be detected.
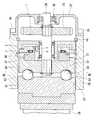
- FIG. 10 shows an example of an electric brake device that employs a ball ramp mechanism as a linear motion mechanism.
- the electric brake device includes a rotating shaft 30, a rotating disk 60 that is prevented from rotating on the outer periphery of the rotating shaft 30, a linearly-moving disk 61 that is disposed in front of the rotating disk 60 in the axial direction, A plurality of balls 62 sandwiched between the disk 60 and the linear motion disk 61, and the magnetic load sensor 1 disposed behind the linear motion disk 61 in the axial direction.
- the linear motion disk 61 is accommodated in an accommodation hole 26 provided in the facing piece 23 so as to be slidable in the axial direction while being prevented from rotating with respect to the caliper body 25.
- a spacer 47 that rotates integrally with the rotating disk 60 is provided at the axial rear end of the rotating disk 60, and the spacer 47 is supported by the magnetic load sensor 1 via a thrust bearing 48.
- the magnetic load sensor 1 supports the rotation disk 60 in the axial direction via the spacer 47 and the thrust bearing 48 to restrict the movement of the rotation disk 60 in the axial direction rearward.
- an inclined groove 63 whose depth gradually decreases along one circumferential direction is formed on the surface of the rotating disk 60 facing the linearly moving disk 61.
- An inclined groove 64 whose depth gradually decreases along the other direction of the circumferential direction is formed on the surface facing the rotating disk 60.
- the ball 62 is incorporated between the inclined groove 63 of the rotating disk 60 and the inclined groove 64 of the linear motion disk 61.
- the balls 62 roll in the inclined grooves 63 and 64, and the interval between the rotating disk 60 and the linearly moving disk 61 is increased.
- This electric brake device rotates the rotary shaft 30 to rotate the linear motion disc 61 and the rotary disc 60 relative to each other, thereby moving the linear motion disc 61 forward in the axial direction and applying an axial load to the friction pad 28. To do. At this time, a reaction force acting rearward in the axial direction acts on the rotating disk 60, and the reaction force is received by the magnetic load sensor 1 via the spacer 47 and the thrust bearing 48. Then, due to the reaction force, the flange member 2 of the magnetic load sensor 1 bends rearward in the axial direction, and the relative position of the magnetic target 4 and the magnetic sensor 5 changes.
- the output signal of the magnetic sensor 5 changes according to the magnitude of the axial load applied to the friction pad 28, and the magnitude of the axial load is based on the output signal of the magnetic sensor 5. It is possible to detect the pressure (the pressing force of the friction pad 28).
- FIG. 13 shows a magnetic load sensor 70 according to a second embodiment of the present invention. Portions corresponding to the first embodiment are denoted by the same reference numerals and description thereof is omitted.
- a load acting surface 6 on which a load is input is formed on the axially front surface 7 of the outer diameter side portion of the flange member 2.
- the load acting surface 6 is a plane perpendicular to the axial direction, and is formed at a position offset axially rearward with respect to the axial front surface 7 of the portion supported by the support member 3 of the flange member 2.
- a supported surface 10 supported by the support member 3 is formed on the rear surface in the axial direction of the outer diameter side portion of the flange member 2.
- the supported surface 10 is a plane perpendicular to the axial direction, and is formed at a position that is offset forward in the axial direction with respect to the axial rear surface 11 of the portion to which the load of the flange member 2 is input.
- the support member 3 includes an annular support portion 71 that supports the axial rear surface of the inner diameter side portion of the flange member 2, a cylindrical portion 72 that is provided to face the outer diameter side of the flange member 2, and the flange member 2. It has the connection part 73 which connects between the cylindrical part 72 and the support part 71 in the axial direction back.
- the connecting portion 73 has a stepped shape whose inner diameter side is offset rearward in the axial direction, and the outer periphery of the rear end portion in the axial direction of the support portion 71 is fitted to the inner periphery of the stepped portion of the connecting portion 73 with a tightening margin. And integrated.
- the front end portion in the axial direction of the support portion 71 is fitted to the inner periphery of the step 12 on the rear surface side of the flange member 2 with a tightening margin.
- the connecting portion 73 of the supporting member 3 has a contact surface 74 with the supporting portion 71 on the axially front surface of the inner diameter side portion thereof.
- the connecting portion 73 of the support member 3 has an attachment surface 75 on the axially rear surface of the outer diameter side portion.
- the contact surface 74 is formed at a position offset axially rearward with respect to the axial front surface 76 of the connecting portion 73.
- the attachment surface 75 is formed at a position offset forward in the axial direction with respect to the axial rear surface 77 of the connecting portion 73.
- the magnetic target 4 is fixed to the outer periphery of the flange member 2.
- the magnetic sensor 5 is fixed to the inner periphery of the cylindrical portion 72 of the support member 3 so as to face the magnetic target 4 in the radial direction.
- the support portion 71 of the support member 3 supports the flange member 2 at a position shifted inward in the radial direction from the input position of the load to the flange member 2 (that is, the load acting surface 6).
- the flange member 2 is configured such that when the load is input, the outer diameter side portion bends rearward in the axial direction with the position of the supported surface 10 as a fulcrum.
- the magnetic load sensor 70 causes the flange member 2 to move the inner diameter side portion by the axial load.
- the support member 3 bends in the axial direction rearward as a fulcrum, and the support member 3 bends in the axial direction rearward with the outer diameter side end as a fulcrum.
- the output signal of the magnetic sensor 5 changes according to the relative displacement of the magnetic sensor 5.
- the load acting surface 6 of the flange member 2 is offset axially rearward with respect to the axial front surface 7 of the flange member 2 as in the first embodiment.
- the displacement in the radial direction of the load acting surface 6 when bent can be kept small. Therefore, the slip of the load acting surface 6 when a load is input to the flange member 2 is reduced, and as a result, it is possible to prevent a hysteresis error due to the slip of the load acting surface 6 between the load increasing and the load decreasing. Can do.
- the supported surface 10 of the flange member 2 is offset forward in the axial direction with respect to the axial rear surface 11 of the flange member 2 as in the first embodiment.
- the radial displacement of the supported surface 10 when bending is also reduced. Therefore, the slip of the supported surface 10 when a load is input to the flange member 2 is reduced, and as a result, it is possible to prevent a hysteresis error due to the slip of the supported surface 10 between the load increase and the load decrease. it can.
- the contact surface 74 and the attachment surface 75 of the support member 3 are also offset so that the contact surface 74 and the attachment surface of the support member 3 when a load is input to the flange member 2.
- the slippage at 75 is also reduced, and hysteresis errors due to slippage at the contact surface 74 and the mounting surface 75 can be prevented.
- the magnetic load sensor 70 of the second embodiment can also be used by being incorporated in an electric brake device for a vehicle, as in the first embodiment.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Combustion & Propulsion (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
- Braking Arrangements (AREA)
Abstract
ヒステリシス誤差が生じにくい荷重センサを提供する。フランジ部材(2)と、そのフランジ部材(2)を軸方向後方から支持する支持部材(3)と、フランジ部材(2)に固定された磁気ターゲット(4)と、支持部材(3)に固定された磁気センサ(5)とを有し、磁気センサ(5)で検出した磁束に基づいて荷重の大きさを検出する磁気式荷重センサ(1)において、フランジ部材(2)の荷重が入力される荷重作用面(6)を、フランジ部材(2)の軸方向前面(7)に対して軸方向後方にオフセットした位置に形成した構成を採用する。
Description
この発明は、磁気式荷重センサおよびその磁気式荷重センサを用いた電動ブレーキ装置に関する。
電動ブレーキ装置は、一般に、電動モータの回転を摩擦パッドの軸方向移動に変換し、その摩擦パッドをブレーキディスクに押し付けて制動力を発生する。この制動力を所望の大きさに制御するため、電動ブレーキ装置には、摩擦パッドに印加する荷重の反力を受ける部分に荷重センサを組み込むことが多い。この荷重センサにかかる荷重(すなわち摩擦パッドに印加する荷重)の大きさは最大で30kN程度であり、また、電動ブレーキの応答性を高めるために微小変位で荷重を検出する荷重センサが用いられる。
このように大きな荷重を微小変位で検出する荷重センサとして、例えば、下記特許文献1に記載のものが知られている。特許文献1の荷重センサは、対向一対の円環板状の押圧板と、その一対の押圧板の間に挟み込まれた水晶圧電素子と、その水晶圧電素子と片側の押圧板との間を電気的に絶縁する絶縁板と、水晶圧電素子が発生する電圧を取り出すリード線とからなる。
この特許文献1の荷重センサは、軸方向荷重が入力されると、その荷重で水晶圧電素子の内部に圧縮応力が生じ、その応力の大きさに応じた電圧が水晶圧電素子に発生するので、この水晶圧電素子の電圧を計測することで荷重の大きさを検出することができる。また、水晶圧電素子の変形による押圧板の変位は微小なので、このセンサを電動ブレーキに組み込んだ場合、電動ブレーキの応答性を損なうことがない。
しかしながら、この荷重センサは、入力された荷重を水晶圧電素子で直接受けるので、衝撃荷重や軸方向に対して斜め方向の荷重が加わると水晶圧電素子に割れや欠けが生じるおそれがあった。また、圧電素子と片方の押圧板の間を電気的に絶縁する絶縁板にも荷重が作用するので、絶縁板に高い耐久性が必要とされるが、樹脂などの安価な絶縁板では耐久性を確保するのが難しかった。
そこで、本願発明の発明者は、大きな荷重を微小変位で検出することができ、しかも耐久性に優れた荷重センサを研究し、そのような荷重センサとして、図15に示すものを社内において開発した。
図15に示す荷重センサ80は、フランジ部材2と支持部材3と磁気ターゲット4と磁気センサ5とからなる。フランジ部材2は、軸方向前方から荷重が入力されたときにたわみを生じるように、荷重の入力位置から径方向外方にずらした位置で軸方向後方から支持部材3で支持されている。磁気ターゲット4は、フランジ部材2に固定されている。磁気センサ5は、磁気ターゲット4が発生する磁束を検出するように、支持部材3に固定されている。
この荷重センサ80は、軸方向前方からフランジ部材2に荷重が入力されると、フランジ部材2のたわみによって磁気ターゲット4と磁気センサ5が相対変位し、その磁気ターゲット4と磁気センサ5の相対変位に応じて磁気センサ5の出力信号が変化するので、磁気センサ5の出力信号に基づいて荷重の大きさを検出することができる。ここで、荷重センサ80に荷重が入力されたときに、その荷重はフランジ部材2に作用してフランジ部材2をたわませるが、磁気センサ5には作用しない。そのため、衝撃荷重や軸方向に対して斜め方向の荷重が加わっても故障しにくく、高い耐久性を確保することができる。
本願の発明者は、実際に図15に示す荷重センサを試作し、その荷重センサで電動ブレーキ装置の軸方向荷重を検出する試験を行なったところ、荷重増加時(すなわちフランジ部材2のたわみが増加するとき)と荷重減少時(すなわちフランジ部材2のたわみが減少するとき)の間にヒステリシス誤差が生じることが分かった。
そして、本願の発明者は、このヒステリシス誤差が生じる原因を調査した結果、フランジ部材2がたわむときに、そのたわみによって、フランジ部材2の荷重作用面6が僅かに径方向に変位し、その変位によって荷重作用面6に生じる僅かな滑りが原因であることを見いだした。
この発明が解決しようとする課題は、ヒステリシス誤差が生じにくい荷重センサを提供することである。
本願の発明者は、図15に示すフランジ部材2に軸方向前方から軸方向荷重を入力したときにフランジ部材2の各部位に生じる径方向の変位を解析したところ、図16(a)に示すように、フランジ部材2の軸方向前面は径方向内方に変位し、フランジ部材2の軸方向後面は径方向外方に変位するが、フランジ部材2の軸方向前面と軸方向後面の間の部位(すなわち、軸方向の中間部位)は、径方向にほとんど変位しないことが分かった。そして、このフランジ部材2の軸方向前面と軸方向後面の間に荷重作用面6を配置すれば、荷重作用面6の滑りを低減することが可能となる点に着眼した。
この着眼に基づいて、本願発明では、軸方向前方から荷重が入力されてたわみを生じるフランジ部材と、そのフランジ部材を前記荷重の入力位置から径方向にずらした位置で軸方向後方から支持する支持部材と、磁束を発生する磁気ターゲットと、その磁気ターゲットが発生する磁束を検出する磁気センサとを有し、前記磁気ターゲットと磁気センサは、前記フランジ部材に荷重が入力されたときにそのフランジ部材のたわみにより磁気ターゲットと磁気センサが相対変位するように、磁気ターゲットと磁気センサの一方が前記フランジ部材に固定され、他方が前記支持部材に固定され、前記磁気センサで検出した磁束に基づいて前記荷重の大きさを検出する磁気式荷重センサとして、前記フランジ部材の前記荷重が入力される荷重作用面を、前記フランジ部材の支持部材で支持される部分の軸方向前面に対して軸方向後方にオフセットした位置に形成した磁気式荷重センサを提供する。
このようにすると、フランジ部材の荷重作用面が、フランジ部材の軸方向前面に対して軸方向後方にオフセットしているので、フランジ部材がたわむときの荷重作用面の径方向の変位を小さく抑えることができる。そのため、フランジ部材に荷重を入力したときの荷重作用面の滑りが低減され、荷重作用面の滑りによるヒステリシス誤差を防止することができる。
さらに、前記フランジ部材の支持部材で支持される被支持面を、前記フランジ部材の前記荷重が入力される部分の軸方向後面に対して軸方向前方にオフセットした位置に形成すると好ましい。このようにすると、フランジ部材の被支持面が、フランジ部材の軸方向後面に対して軸方向前方にオフセットしているので、フランジ部材がたわむときの被支持面の径方向の変位も小さく抑えることができる。そのため、フランジ部材に荷重を入力したときの被支持面の滑りが低減され、被支持面の滑りによるヒステリシス誤差を防止することができる。
前記フランジ部材の前記荷重が入力される荷重作用面と、前記フランジ部材の支持部材で支持される部分の軸方向前面とは、段差を介して連なる二平面とすることができる。この場合、前記フランジ部材の荷重作用面と前記フランジ部材の前面側の段差との間に両者を滑らかにつなぐ断面円弧状の隅R部を形成すると、フランジ部材に荷重を入力したときに、フランジ部材の荷重作用面と段差が交差する位置に引張応力が集中するのを防止して、フランジ部材の耐久性を確保することができる。
また、前記フランジ部材の支持部材で支持される被支持面と、前記フランジ部材の前記荷重が入力される部分の軸方向後面とは、段差を介して連なる二平面とすることができる。この場合、前記フランジ部材の被支持面と前記フランジ部材の後面側の段差とが交差する位置に、円弧状の断面をもつ盗み溝を形成すると、フランジ部材に荷重を入力したときに、フランジ部材の被支持面と段差が交差する位置に圧縮応力が集中するのを防止して、フランジ部材の耐久性を確保することができる。
前記フランジ部材の前記荷重が入力される荷重作用面と、前記フランジ部材の前記支持部材で支持される被支持面とを、同一平面上に位置するように形成すると、フランジ部材に荷重を入力したときの荷重作用面の滑りと被支持面の滑りとを極めて効果的に低減することが可能となる。ここで、同一平面上とは、フランジ部材の荷重作用面と被支持面とが、数学的に厳密な意味で同一平面上にあることを必要とせず、荷重作用面と被支持面とが、フランジ部材の荷重が入力される部分の厚さの10%程度の厚みをもつ仮想の平面状領域内に存在する程度のことを意味する。
前記磁気ターゲットとして、磁気ターゲットと磁気センサの軸方向の相対変位方向である軸方向に対して直交する方向を磁化方向とする複数の永久磁石を軸方向に並ぶように配置したものを採用し、その隣り合う磁極の境目の近傍に前記磁気センサを配置すると好ましい。
このようにすると、磁気センサの出力信号は、磁気ターゲットと磁気センサの軸方向の相対変位に対して急峻に変化し、一方、軸方向以外の方向の相対変位に対してはあまり変化しないという軸方向の指向性を示す。そのため、磁気センサの出力信号が外部振動の影響を受けにくく、安定した精度で荷重の大きさを検出することができる。
前記支持部材は、前記フランジ部材の外径側端部の軸方向後面を支持する環状の支持部と、前記フランジ部材の外周に締め代をもって嵌合するように前記支持部の外径側に形成された嵌合筒部とを有する構成とすることができる。このようにすると、フランジ部材が支持部材と一体化するので、磁気式荷重センサの取り扱いが容易になるとともに、嵌合筒部とフランジ部材の間に締め代が設定されているので、フランジ部材がたわむときに、嵌合筒部とフランジ部材の間に滑りが生じにくく、嵌合筒部とフランジ部材の嵌合面間の滑りによるヒステリシス誤差を防止することができる。
また、この発明では、上記磁気式荷重センサを備えた電動ブレーキ装置を提供する。
この発明の磁気式荷重センサは、フランジ部材の荷重作用面が、フランジ部材の軸方向前面に対して軸方向後方にオフセットしているので、フランジ部材がたわむときの荷重作用面の径方向の変位が小さく抑えられる。そのため、フランジ部材に荷重が入力されたときに、荷重作用面の滑りによるヒステリシス誤差を生じにくい。
図1~図3に、この発明の第1実施形態の磁気式荷重センサ1を示す。この磁気式荷重センサ1は、軸方向前方から荷重が入力されてたわみを生じるフランジ部材2と、フランジ部材2を軸方向後方から支持する支持部材3と、磁束を発生する磁気ターゲット4と、磁気ターゲット4が発生する磁束を検出する磁気センサ5とからなる。
フランジ部材2は、鉄等の金属で形成された円環板状の部材である。フランジ部材2の内径側部分の軸方向前面には、荷重が入力される荷重作用面6が形成されている。荷重作用面6は軸方向に直角な平面であり、フランジ部材2の支持部材3で支持される部分の軸方向前面7に対して軸方向後方にオフセットした位置に形成されている。このオフセットにより、荷重作用面6はフランジ部材2の軸方向前端と後端の間の領域(フランジ部材2の軸方向の中間領域)に存在する配置となっている。
図3に示すように、荷重作用面6と、フランジ部材2の支持部材3で支持される部分の軸方向前面7とは、段差8を介して連なっている。荷重作用面6と段差8の間には、両者を滑らかにつなぐ断面円弧状の隅R部9が形成されている。この隅R部9は、軸方向前方からフランジ部材2に軸方向荷重が入力されたときに、フランジ部材2の荷重作用面6と段差8が交差する位置に引張応力が集中するのを防止することにより、フランジ部材2の耐久性を確保するものである。
フランジ部材2の外径側部分の軸方向後面には、支持部材3で支持される被支持面10が形成されている。被支持面10は、軸方向に直角な平面であり、フランジ部材2の荷重が入力される部分の軸方向後面11に対して軸方向前方にオフセットした位置に形成されている。このオフセットにより、被支持面10はフランジ部材2の軸方向前端と後端の間の領域(フランジ部材2の軸方向の中間領域)に存在する配置となっている。
被支持面10と、フランジ部材2の荷重が入力される部分の軸方向後面11とは、段差12を介して連なっている。被支持面10と段差12とが交差する位置には、円弧状の断面をもち周方向に延びる盗み溝13が形成されている。この盗み溝13は、軸方向前方からフランジ部材2に軸方向荷重が入力されたときに、フランジ部材2の被支持面10と段差12が交差する位置に圧縮応力が集中するのを防止することにより、フランジ部材2の耐久性を確保するものである。
支持部材3は、フランジ部材2と同一の金属で形成されている。支持部材3は、フランジ部材2の外径側端部の軸方向後面11を支持する環状の支持部14と、フランジ部材2の外周に嵌合するように支持部14の外径側に形成された嵌合筒部15と、フランジ部材2の内径側に対向するように設けられた円筒部16と、フランジ部材2の軸方向後方で円筒部16と支持部14の間を連結する連結部17とを有する。
ここで、支持部材3の支持部14は、フランジ部材2に対する荷重の入力位置(すなわち荷重作用面6)から径方向外方にずれた位置でフランジ部材2を支持している。これにより、フランジ部材2は、荷重が入力されたときに被支持面10の位置を支点として内径側部分が軸方向後方にたわむようになっている。
嵌合筒部15の内周とフランジ部材2の外周の間には締め代が設定されている。この締め代によって、フランジ部材2が支持部材3と一体化し、磁気式荷重センサ1の取り扱いが容易となっている。
磁気ターゲット4は、フランジ部材2の内周に固定されている。磁気センサ5は、磁気ターゲット4と径方向に対向するように支持部材3の円筒部16の外周に固定されている。円筒部16の内周には複数の軸受18が軸方向に間隔をおいて装着されている。
磁気ターゲット4は、フランジ部材2のたわみによる磁気ターゲット4と磁気センサ5の相対変位方向である軸方向に対して直交する方向(ここでは半径方向)を磁化方向とする2個の永久磁石19からなる。2個の永久磁石19は、それぞれの永久磁石19の反対の極性を有する磁極(すなわち、一方の永久磁石19のN極と他方の永久磁石19のS極)が軸方向に並ぶように隣接して配置されている。
永久磁石19としては、例えば、ネオジム磁石を使用すると、省スペースで強力な磁束を発生させることができるが、サマリウムコバルト磁石、サマリウム窒化鉄磁石、アルニコ磁石、フェライト磁石、プラセオジム磁石、などを使用してもよい。サマリウムコバルト磁石、サマリウム窒化鉄磁石、またはアルニコ磁石を使用すると、永久磁石19の温度上昇に伴う磁束の減少を抑えることができる。また、プラセオジム磁石を使用すると、永久磁石19の機械的強度を向上することができる。
磁気センサ5は、2個の永久磁石19の隣り合う磁極の境目の近傍で磁気ターゲット4と軸直交方向(図では半径方向)に対向するように配置されている。磁気センサ5としては、磁気抵抗素子(いわゆるMRセンサ)や、磁気インピーダンス素子(いわゆるMIセンサ)を使用することも可能であるが、ホールICを使用するとコスト面で有利であり、また耐熱性の高いホールICが市販されているので電動ブレーキの用途に好適である。
この磁気式荷重センサ1は、図1の矢印に示すように、軸方向前方から後方に向かう軸方向荷重がフランジ部材2に入力されると、その軸方向荷重によってフランジ部材2が外径側端部を支点として軸方向後方にたわみ、このたわみに伴い、磁気ターゲット4と磁気センサ5が軸方向に相対変位し、磁気ターゲット4と磁気センサ5の相対変位に応じて磁気センサ5の出力信号が変化する。そのため、フランジ部材2に入力される軸方向荷重の大きさと、磁気センサ5の出力信号との関係を予め把握しておくことにより、磁気センサ5の出力信号に基づいてフランジ部材2にかかる軸方向荷重の大きさを検出することができる。
ここで、磁気式荷重センサ1に軸方向荷重が入力されたときの磁気ターゲット4と磁気センサ5の相対変化量は極めて小さい。例えば、この磁気式荷重センサ1を後述する電動ブレーキ装置に組み込んだとき、磁気式荷重センサ1には最大で30kNの軸方向荷重が入力されるが、このときの磁気ターゲット4と磁気センサ5の軸方向の相対変化量は0.4mm程度である。ここで、上記磁気式荷重センサ1は、半径方向を磁化方向とする2個の永久磁石19のN極とS極が軸方向に隣接しているので、そのN極とS極の境目に配置された磁気センサ5の付近には、軸方向に交差する磁束が高い密度で存在している。そのため、磁気ターゲット4と磁気センサ5の軸方向の僅かな相対変位に対して、磁気センサ5の出力信号が急峻に変化する。したがって、磁気ターゲット4と磁気センサ5の相対変位が極めて小さいにもかかわらず、フランジ部材2に作用する軸方向荷重の大きさを検出することが可能となっている。
図15に上記実施形態に対する比較例の磁気式荷重センサ80を示す。この磁気式荷重センサ80は、フランジ部材2の荷重作用面6がフランジ部材2の軸方向前面7に対してオフセットされておらず、フランジ部材2の前面側の段差8が存在しない。また、フランジ部材2の被支持面10もフランジ部材2の軸方向後面11に対してオフセットされておらず、フランジ部材2の後面側の段差12が存在しない。その他の構成は、上記実施形態と同一である。
そして、この図15に示す比較例の磁気式荷重センサ80のフランジ部材2に軸方向前方から軸方向荷重を入力したときにフランジ部材2の各部位に生じる径方向の変位を解析した結果と、上記実施形態の磁気式荷重センサ1のフランジ部材2に軸方向前方から軸方向荷重を入力したときにフランジ部材2の各部位に生じる径方向の変位を解析した結果を、図16(a)、(b)に示す。この解析はフランジ部材2の1/36カットモデルを対象にして行なった。
この解析結果によれば、図15に示すように、フランジ部材2の荷重作用面6をオフセットしない場合、図16(a)に示すような変位分布を示すのに対し、上記実施形態のように、フランジ部材2の荷重作用面6をオフセットした場合、図16(b)に示すように、図16(a)と比較して荷重作用面6が径方向にほとんど変位していないことが分かる。
また、図15に示すように、フランジ部材2の被支持面10をオフセットしない場合、図16(a)に示すような変位分布を示すのに対し、上記実施形態のように、フランジ部材2の被支持面10をオフセットした場合、図16(b)に示すように、図16(a)と比較して被支持面10が径方向にほとんど変位していないことが分かる。
このように、フランジ部材2の荷重作用面6および被支持面10をオフセットした場合に、荷重作用面6と被支持面10の径方向の変位が小さく抑えられる理由は次のように考えられる。すなわち、フランジ部材2に軸方向前方から軸方向荷重を入力したとき、図16(a)に示すように、フランジ部材2の軸方向前面7は径方向内方に変位し、フランジ部材2の軸方向後面11は径方向外方に変位するが、フランジ部材2の軸方向前面7と軸方向後面11の間の部位は、径方向にほとんど変位しない。そして、このフランジ部材2の軸方向前面7と軸方向後面11の間に荷重作用面6と被支持面10が配置されていることから、荷重作用面6と被支持面10の径方向の変位が小さく抑えられるものと考えられる。
以上のように、上記実施形態の磁気式荷重センサ1は、フランジ部材2の荷重作用面6が、フランジ部材2の軸方向前面7に対して軸方向後方にオフセットしているので、フランジ部材2がたわむときの荷重作用面6の径方向の変位を小さく抑えることができる。そのため、フランジ部材2に荷重を入力したときの荷重作用面6の滑りが低減され、この結果、荷重増加時(すなわちフランジ部材2のたわみが増加するとき)と荷重減少時(すなわちフランジ部材2のたわみが減少するとき)の間に、荷重作用面6の滑りによるヒステリシス誤差が生じることを防止することができる。
また、磁気式荷重センサ1は、フランジ部材2の被支持面10が、フランジ部材2の軸方向後面11に対して軸方向前方にオフセットしているので、フランジ部材2がたわむときの被支持面10の径方向の変位も小さく抑えることができる。そのため、フランジ部材2に荷重を入力したときの被支持面10の滑りが低減され、この結果、荷重増加時と荷重減少時の間に被支持面10の滑りによるヒステリシス誤差が生じることを防止することができる。
また、この磁気式荷重センサ1は、荷重が入力されたときに、その荷重はフランジ部材2に作用してフランジ部材2をたわませるが、磁気センサ5には作用しない。そのため、衝撃荷重や軸方向に対して斜め方向の荷重が加わっても磁気センサ5が故障しにくく、高い耐久性を確保することができる。
また、この磁気式荷重センサ1は、フランジ部材2と支持部材3とを同一の線膨張係数をもつ材料で形成しているので、温度上昇したときにフランジ部材2と支持部材3とが同じ割合で熱膨張する。そのため、温度変化による磁気ターゲット4と磁気センサ5の相対変位が生じにくく、温度変化による誤差が生じにくい。
図1~図3では、フランジ部材2に磁気ターゲット4を固定し、支持部材3に磁気センサ5を固定しているが、この磁気ターゲット4と磁気センサ5の関係を反対にしてもよい。すなわち、図4に示すように、フランジ部材2に磁気センサ5を固定し、支持部材3に磁気ターゲット4を固定してもよい。
図5に示すように、フランジ部材2の荷重作用面6と被支持面10は、同一平面上に位置するように形成すると好ましい。このようにすると、フランジ部材2に荷重を入力したときの荷重作用面6の滑りと被支持面10の滑りとを極めて効果的に低減することが可能となる。ここで、同一平面上とは、フランジ部材2の荷重作用面6と被支持面10とが、数学的に厳密な意味で同一平面上にあることを必要とせず、荷重作用面6と被支持面10とが、フランジ部材2の荷重が入力される部分の厚さの10%程度の厚みをもつ仮想の平面状領域内に存在する程度のことを意味する。なお、図5において、フランジ部材2の荷重作用面6と被支持面10は、フランジ部材2の軸方向前面7と軸方向後面11のいずれからも等距離となる中間位置に配置されている。
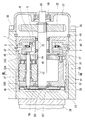
図6~図8に、上記の磁気式荷重センサ1を使用した車両用の電動ブレーキ装置を示す。
この電動ブレーキ装置は、車輪と一体に回転するブレーキディスク21を間に挟んで対向する対向片22,23をブリッジ24で連結した形状のキャリパボディ25と、対向片23のブレーキディスク21に対する対向面に開口する収容孔26に組み込まれた直動アクチュエータ27と、左右一対の摩擦パッド28,29とからなる。
摩擦パッド28は、対向片23とブレーキディスク21の間に設けられており、キャリパボディ25に取り付けられたパッドピン(図示せず)でブレーキディスク21の軸方向に移動可能に支持されている。他方の摩擦パッド29は反対側の対向片22に取り付けられている。キャリパボディ25は、ブレーキディスク21の軸方向にスライド可能に支持されている。
図7に示すように、直動アクチュエータ27は、回転軸30と、回転軸30の外周の円筒面に転がり接触する複数の遊星ローラ31と、これらの遊星ローラ31を囲むように配置された外輪部材32と、遊星ローラ31を自転可能かつ公転可能に保持するキャリヤ33と、外輪部材32の軸方向後方に配置された磁気式荷重センサ1とを有する。
回転軸30は、図6に示す電動モータ34の回転が歯車35を介して入力されることにより回転駆動される。回転軸30は、対向片23を軸方向に貫通して形成された収容孔26の軸方向後側の開口から一端が突出した状態で収容孔26に挿入され、収容孔26からの突出部分に歯車35がスプライン嵌合して回り止めされている。歯車35は、収容孔26の軸方向後側の開口を塞ぐようにボルト36で固定した蓋37で覆われている。蓋37には回転軸30を回転可能に支持する軸受38が組み込まれている。
図8に示すように、遊星ローラ31は、回転軸30の外周の円筒面に転がり接触しており、回転軸30が回転したときに遊星ローラ31と回転軸30の間の摩擦によって遊星ローラ31も回転するようになっている。遊星ローラ31は、周方向に一定の間隔をおいて複数設けられている。
図7に示すように、外輪部材32は、キャリパボディ25の対向片23に設けられた収容孔26内に収容され、その収容孔26の内周で軸方向にスライド可能に支持されている。外輪部材32の軸方向前端には、摩擦パッド28の背面に形成された係合凸部39に係合する係合凹部40が形成され、この係合凸部39と係合凹部40の係合によって、外輪部材32がキャリパボディ25に対して回り止めされている。
外輪部材32の内周には螺旋凸条41が設けられ、遊星ローラ31の外周には、螺旋凸条41に係合する円周溝42が設けられており、遊星ローラ31が回転したときに、外輪部材32の螺旋凸条41が円周溝42に案内されて、外輪部材32が軸方向に移動するようになっている。ここでは遊星ローラ31の外周にリード角が0度の円周溝42を設けているが、円周溝42のかわりに螺旋凸条41と異なるリード角をもつ螺旋溝を設けてもよい。
キャリヤ33は、遊星ローラ31を回転可能に支持するキャリヤピン33Aと、その各キャリヤピン33Aの軸方向前端の周方向間隔を一定に保持する環状のキャリヤプレート33Bと、各キャリヤピン33Aの軸方向後端の周方向間隔を一定に保持する環状のキャリヤ本体33Cとからなる。キャリヤプレート33Bとキャリヤ本体33Cは遊星ローラ31を間に軸方向に対向しており、周方向に隣り合う遊星ローラ31の間に配置された連結棒43を介して連結されている。
キャリヤ本体33Cは、滑り軸受44を介して回転軸30に支持され、回転軸30に対して相対回転可能となっている。遊星ローラ31とキャリヤ本体33Cの間には、遊星ローラ31の自転がキャリヤ本体33Cに伝達するのを遮断するスラスト軸受45が組み込まれている。
各キャリヤピン33Aは、周方向に間隔をおいて配置された複数のキャリヤピン33Aに外接するように装着された縮径リングばね46で径方向内方に付勢されている。この縮径リングばね46の付勢力によって、遊星ローラ31の外周は回転軸30の外周に押さえ付けられ、回転軸30と遊星ローラ31の間の滑りが防止されている。縮径リングばね46の付勢力を遊星ローラ31の軸方向全長にわたって作用させるため、キャリヤピン33Aの両端に縮径リングばね46が設けられている。
磁気式荷重センサ1は、フランジ部材2の軸方向後方に支持部材3が位置する向きで収容孔26内に嵌め込まれている。キャリヤ33と磁気式荷重センサ1の間には、キャリヤ33と一体に公転する間座47と、間座47と磁気式荷重センサ1の間で軸方向荷重を伝達するスラスト軸受48とが組み込まれている。スラスト軸受48は、フランジ部材2の荷重作用面6に接触するように設けられており、このスラスト軸受48を介して間座47からフランジ部材2の荷重作用面6に軸方向荷重が入力されるようになっている。支持部材3の円筒部16内に組み込まれた軸受18で、回転軸30が回転可能に支持されている。
磁気式荷重センサ1は、支持部材3の外周縁を、収容孔26の内周に装着した止め輪49で係止することによって軸方向後方への移動が規制されている。そして、この磁気式荷重センサ1は、間座47とスラスト軸受48とを介してキャリヤ本体33Cを軸方向に支持することで、キャリヤ33の軸方向後方への移動を規制している。また、キャリヤ33は、回転軸30の軸方向前端に装着された止め輪50で軸方向前方への移動も規制されている。したがって、キャリヤ33は、軸方向前方と軸方向後方の移動がいずれも規制され、キャリヤ33に保持された遊星ローラ31も軸方向移動が規制された状態となっている。
次に、上述した電動ブレーキ装置の動作例を説明する。
電動モータ34を作動させると、回転軸30が回転し、遊星ローラ31がキャリヤピン33Aを中心に自転しながら回転軸30を中心に公転する。このとき螺旋凸条41と円周溝42の係合によって外輪部材32と遊星ローラ31が軸方向に相対移動するが、遊星ローラ31はキャリヤ33と共に軸方向の移動が規制されているので、遊星ローラ31は軸方向に移動せず、外輪部材32が軸方向に移動する。このようにして、直動アクチュエータ27は、電動モータ34で駆動される回転軸30の回転を外輪部材32の軸方向移動に変換し、その外輪部材32で摩擦パッド28に軸方向荷重を印加することで、摩擦パッド28をブレーキディスク21に押し付けて制動力を発生させる。
ここで、外輪部材32が摩擦パッド28に軸方向荷重を印加するとき、外輪部材32には軸方向後方への反力が作用し、その反力は、遊星ローラ31、キャリヤ33、間座47、スラスト軸受48を介して磁気式荷重センサ1で受け止められる。そして、その反力によって磁気式荷重センサ1のフランジ部材2が軸方向後方にたわみ、磁気ターゲット4と磁気センサ5が相対変位する。このとき、その磁気ターゲット4と磁気センサ5の相対変位に応じて磁気センサ5の出力信号が変化するので、磁気センサ5の出力信号に基づいて軸方向荷重の大きさを検出することができる。また、この磁気センサ5の出力信号を用いて電動ブレーキ装置の制動力をフィードバック制御することにより、高精度な荷重制御が実現できる。
この電動ブレーキ装置では、回転軸30の回転を外輪部材32の軸方向移動に変換する直動機構として、回転軸30の外周の円筒面に転がり接触する複数の遊星ローラ31と、遊星ローラ31を自転可能かつ公転可能に保持し、軸方向移動を規制されたキャリヤ33と、複数の遊星ローラ31を囲むように配置された外輪部材32と、外輪部材32の内周に設けられた螺旋凸条41と、螺旋凸条41と係合するように各遊星ローラ31の外周に設けられた螺旋溝または円周溝42とからなる遊星ローラ31機構を採用しているが、他の構成の直動機構を採用した電動ブレーキ装置にも上記磁気式荷重センサ1を組み込むことができる。
例えば、直動機構としてボールねじ機構を採用した電動ブレーキ装置の例を図9に示す。以下、上記実施形態に対応する部分は、同一の符号を付して説明を省略する。
図9において、直動アクチュエータ27は、回転軸30と、回転軸30と一体に設けられたねじ軸51と、ねじ軸51を囲むように設けられたナット52と、ねじ軸51の外周に形成されたねじ溝53とナット52の内周に形成されたねじ溝54の間に組み込まれた複数のボール55と、ナット52のねじ溝54の終点から始点にボール55を戻す図示しないリターンチューブと、ナット52の軸方向後方に配置された磁気式荷重センサ1とを有する。
ナット52は、対向片23に設けられた収容孔26内に、キャリパボディ25に対して回り止めされた状態で軸方向にスライド可能に収容されている。ねじ軸51の軸方向後端にはねじ軸51と一体に回転する間座47が設けられ、その間座47がスラスト軸受48を介して磁気式荷重センサ1で支持されている。ここで、磁気式荷重センサ1は、間座47とスラスト軸受48とねじ軸51とを介してナット52を軸方向に支持することで、ナット52の軸方向後方への移動を規制している。
この電動ブレーキ装置は、回転軸30を回転させることによって、ねじ軸51とナット52を相対回転させ、ナット52を軸方向前方に移動させて摩擦パッド28に軸方向荷重を印加する。このとき、ねじ軸51には、軸方向後方への反力が作用し、その反力は、間座47、スラスト軸受48を介して磁気式荷重センサ1で受け止められる。そして、その反力によって磁気式荷重センサ1のフランジ部材2が軸方向後方にたわみ、磁気ターゲット4と磁気センサ5が相対変位する。そのため、上記実施形態と同様、磁気センサ5の出力信号が摩擦パッド28に印加される軸方向荷重の大きさに応じて変化し、この磁気センサ5の出力信号に基づいて軸方向荷重の大きさ(摩擦パッド28の押圧力)を検出することができる。
また、直動機構としてボールランプ機構を採用した電動ブレーキ装置の例を図10に示す。
図10において、電動ブレーキ装置は、回転軸30と、回転軸30の外周に回り止めされた回転ディスク60と、回転ディスク60の軸方向前方に対向して配置された直動ディスク61と、回転ディスク60と直動ディスク61の間に挟まれた複数のボール62と、直動ディスク61の軸方向後方に配置された磁気式荷重センサ1とを有する。
直動ディスク61は、対向片23に設けられた収容孔26内に、キャリパボディ25に対して回り止めされた状態で軸方向にスライド可能に収容されている。回転ディスク60の軸方向後端には回転ディスク60と一体に回転する間座47が設けられ、その間座47がスラスト軸受48を介して磁気式荷重センサ1で支持されている。ここで、磁気式荷重センサ1は、間座47とスラスト軸受48とを介して回転ディスク60を軸方向に支持することで回転ディスク60の軸方向後方への移動を規制している。
図10、図11に示すように、回転ディスク60の直動ディスク61に対する対向面には、周方向の一方向に沿って深さが次第に浅くなる傾斜溝63が形成され、直動ディスク61の回転ディスク60に対する対向面には、周方向の他方向に沿って深さが次第に浅くなる傾斜溝64が形成されている。図12(a)に示すように、ボール62は、回転ディスク60の傾斜溝63と直動ディスク61の傾斜溝64の間に組み込まれており、図12(b)に示すように、直動ディスク61に対して回転ディスク60が相対回転すると、傾斜溝63,64内をボール62が転動して、回転ディスク60と直動ディスク61の間隔が拡大するようになっている。
この電動ブレーキ装置は、回転軸30を回転させることによって、直動ディスク61と回転ディスク60を相対回転させて、直動ディスク61を軸方向前方に移動させて摩擦パッド28に軸方向荷重を印加する。このとき、回転ディスク60には、軸方向後方への反力が作用し、その反力は、間座47、スラスト軸受48を介して磁気式荷重センサ1で受け止められる。そして、その反力によって磁気式荷重センサ1のフランジ部材2が軸方向後方にたわみ、磁気ターゲット4と磁気センサ5の相対位置が変化する。そのため、上記実施形態と同様、磁気センサ5の出力信号が摩擦パッド28に印加される軸方向荷重の大きさに応じて変化し、この磁気センサ5の出力信号に基づいて、軸方向荷重の大きさ(摩擦パッド28の押圧力)を検出することができる。
図13に、この発明の第2実施形態の磁気式荷重センサ70を示す。第1実施形態に対応する部分は、同一の符号を付して説明を省略する。
フランジ部材2の外径側部分の軸方向前面7には、荷重が入力される荷重作用面6が形成されている。荷重作用面6は軸方向に直角な平面であり、フランジ部材2の支持部材3で支持される部分の軸方向前面7に対して軸方向後方にオフセットした位置に形成されている。
フランジ部材2の外径側部分の軸方向後面には、支持部材3で支持される被支持面10が形成されている。被支持面10は、軸方向に直角な平面であり、フランジ部材2の荷重が入力される部分の軸方向後面11に対して軸方向前方にオフセットした位置に形成されている。
支持部材3は、フランジ部材2の内径側部分の軸方向後面を支持する環状の支持部71と、フランジ部材2の外径側に対向するように設けられた円筒部72と、フランジ部材2の軸方向後方で円筒部72と支持部71の間を連結する連結部73とを有する。連結部73は、内径側が軸方向後方にオフセットした段付き形状とされており、その連結部73の段差部分の内周に、支持部71の軸方向後端部の外周が締め代をもって嵌合し、一体化している。支持部71の軸方向前端部は、フランジ部材2の後面側の段差12の内周に締め代をもって嵌合している。
支持部材3の連結部73は、その内径側部分の軸方向前面に支持部71との接触面74を有する。支持部材3の連結部73は、その外径側部分の軸方向後面に取付け面75を有する。接触面74は、連結部73の軸方向前面76に対して軸方向後方にオフセットした位置に形成されている。取付け面75は、連結部73の軸方向後面77に対して軸方向前方にオフセットした位置に形成されている。
磁気ターゲット4は、フランジ部材2の外周に固定されている。磁気センサ5は、磁気ターゲット4と径方向に対向するように支持部材3の円筒部72の内周に固定されている。
ここで、支持部材3の支持部71は、フランジ部材2に対する荷重の入力位置(すなわち荷重作用面6)から径方向内方にずれた位置でフランジ部材2を支持している。これにより、フランジ部材2は、荷重が入力されたときに被支持面10の位置を支点として外径側部分が軸方向後方にたわむようになっている。
この磁気式荷重センサ70は、図13の矢印に示すように、軸方向前方から後方に向かう軸方向荷重がフランジ部材2に入力されると、その軸方向荷重によってフランジ部材2が内径側部分を支点として軸方向後方にたわむとともに、支持部材3も外径側端部を支点として軸方向後方にたわみ、このたわみによって、磁気ターゲット4と磁気センサ5が軸方向に相対変位し、磁気ターゲット4と磁気センサ5の相対変位に応じて磁気センサ5の出力信号が変化する。このように、フランジ部材2に軸方向荷重が入力されたときに、フランジ部材2だけでなく支持部材3にもたわみが生じるので、磁気ターゲット4と磁気センサ5の相対変位量が大きく、高い分解能で荷重を検出することが可能である。
この磁気式荷重センサ70は、第1実施形態と同様、フランジ部材2の荷重作用面6が、フランジ部材2の軸方向前面7に対して軸方向後方にオフセットしているので、フランジ部材2がたわむときの荷重作用面6の径方向の変位を小さく抑えることができる。そのため、フランジ部材2に荷重を入力したときの荷重作用面6の滑りが低減され、この結果、荷重増加時と荷重減少時の間に、荷重作用面6の滑りによるヒステリシス誤差が生じることを防止することができる。
また、磁気式荷重センサ70は、第1実施形態と同様、フランジ部材2の被支持面10が、フランジ部材2の軸方向後面11に対して軸方向前方にオフセットしているので、フランジ部材2がたわむときの被支持面10の径方向の変位も小さく抑えることができる。そのため、フランジ部材2に荷重を入力したときの被支持面10の滑りが低減され、この結果、荷重増加時と荷重減少時の間に被支持面10の滑りによるヒステリシス誤差が生じることを防止することができる。
また、フランジ部材2と同様に、支持部材3の接触面74および取付け面75もオフセットして配置されているので、フランジ部材2に荷重を入力したときの支持部材3の接触面74および取付け面75での滑りも低減され、接触面74および取付け面75での滑りによるヒステリシス誤差も防止することができる。
図14に示すように、第2実施形態の磁気式荷重センサ70も、第1実施形態と同様に、車両用の電動ブレーキ装置に組み込んで使用することができる。
1 磁気式荷重センサ
2 フランジ部材
3 支持部材
4 磁気ターゲット
5 磁気センサ
6 荷重作用面
7 軸方向前面
8 段差
9 隅R部
10 被支持面
11 軸方向後面
12 段差
13 盗み溝
14 支持部
15 嵌合筒部
19 永久磁石
70 磁気式荷重センサ
2 フランジ部材
3 支持部材
4 磁気ターゲット
5 磁気センサ
6 荷重作用面
7 軸方向前面
8 段差
9 隅R部
10 被支持面
11 軸方向後面
12 段差
13 盗み溝
14 支持部
15 嵌合筒部
19 永久磁石
70 磁気式荷重センサ
Claims (10)
- 軸方向前方から荷重が入力されてたわみを生じるフランジ部材(2)と、
そのフランジ部材(2)を前記荷重の入力位置から径方向にずらした位置で軸方向後方から支持する支持部材(3)と、
磁束を発生する磁気ターゲット(4)と、
その磁気ターゲット(4)が発生する磁束を検出する磁気センサ(5)とを有し、
前記磁気ターゲット(4)と磁気センサ(5)は、前記フランジ部材(2)に荷重が入力されたときにそのフランジ部材(2)のたわみにより磁気ターゲット(4)と磁気センサ(5)が相対変位するように、磁気ターゲット(4)と磁気センサ(5)のうちの一方が前記フランジ部材(2)に固定され、他方が前記支持部材(3)に固定され、前記磁気センサ(5)で検出した磁束に基づいて前記荷重の大きさを検出する磁気式荷重センサであって、
前記フランジ部材(2)の前記荷重が入力される荷重作用面(6)を、前記フランジ部材(2)の支持部材(3)で支持される部分の軸方向前面(7)に対して軸方向後方にオフセットした位置に形成したことを特徴とする磁気式荷重センサ。 - 前記フランジ部材(2)の支持部材(3)で支持される被支持面(10)を、前記フランジ部材(2)の前記荷重が入力される部分の軸方向後面(11)に対して軸方向前方にオフセットした位置に形成した請求項1に記載の磁気式荷重センサ。
- 前記フランジ部材(2)の前記荷重が入力される荷重作用面(6)と、前記フランジ部材(2)の支持部材(3)で支持される部分の軸方向前面(7)とが、段差(8)を介して連なる二平面である請求項1または2に記載の磁気式荷重センサ。
- 前記フランジ部材(2)の支持部材(3)で支持される被支持面(10)と、前記フランジ部材(2)の前記荷重が入力される部分の軸方向後面(11)とが、段差(12)を介して連なる二平面である請求項1から3のいずれかに記載の磁気式荷重センサ。
- 前記フランジ部材(2)の前記荷重が入力される荷重作用面(6)と、前記フランジ部材(2)の前記支持部材(3)で支持される被支持面(10)とを、同一平面上に位置するように形成した請求項1から4のいずれかに記載の磁気式荷重センサ。
- 前記磁気ターゲット(4)は、磁気ターゲット(4)と磁気センサ(5)の軸方向の相対変位方向である軸方向に対して直交する方向を磁化方向とする複数の永久磁石(19)を軸方向に並ぶように配置したものであり、その隣り合う磁極の境目の近傍に前記磁気センサ(5)が配置されている請求項1から5のいずれかに記載の磁気式荷重センサ。
- 前記フランジ部材(2)の荷重作用面(6)と前記フランジ部材(2)の前面側の段差(8)との間に両者を滑らかにつなぐ断面円弧状の隅R部(9)を形成した請求項3に記載の磁気式荷重センサ。
- 前記フランジ部材(2)の被支持面(10)と前記フランジ部材(2)の後面側の段差(12)とが交差する位置に、円弧状の断面をもつ盗み溝(13)を形成した請求項4に記載の磁気式荷重センサ。
- 前記支持部材(3)が、前記フランジ部材(2)の外径側端部の軸方向後面を支持する環状の支持部(14)と、前記フランジ部材(2)の外周に締め代をもって嵌合するように前記支持部(14)の外径側に形成された嵌合筒部(15)とを有する請求項1から8のいずれかに記載の磁気式荷重センサ。
- 請求項1から9のいずれかに記載の磁気式荷重センサを備えた電動ブレーキ装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201380028576.2A CN104428646B (zh) | 2012-07-11 | 2013-07-09 | 磁式负载传感器以及电动制动装置 |
| US14/413,713 US9528889B2 (en) | 2012-07-11 | 2013-07-09 | Magnetic load sensor unit and electric brake system |
| EP13817176.4A EP2873957B1 (en) | 2012-07-11 | 2013-07-09 | Magnetic load sensor and electric brake device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012155528A JP5877134B2 (ja) | 2012-07-11 | 2012-07-11 | 磁気式荷重センサおよび電動ブレーキ装置 |
| JP2012-155528 | 2012-07-11 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2014010582A1 true WO2014010582A1 (ja) | 2014-01-16 |
Family
ID=49916034
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2013/068724 WO2014010582A1 (ja) | 2012-07-11 | 2013-07-09 | 磁気式荷重センサおよび電動ブレーキ装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9528889B2 (ja) |
| EP (1) | EP2873957B1 (ja) |
| JP (1) | JP5877134B2 (ja) |
| CN (2) | CN104428646B (ja) |
| WO (1) | WO2014010582A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110168334A (zh) * | 2016-12-28 | 2019-08-23 | Ntn株式会社 | 载荷传感器以及电动制动装置 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5833405B2 (ja) * | 2011-10-11 | 2015-12-16 | Ntn株式会社 | 直動アクチュエータ用の磁気式荷重センサおよび直動アクチュエータ |
| JP5947229B2 (ja) * | 2013-01-10 | 2016-07-06 | Ntn株式会社 | 磁気式荷重センサおよび電動ブレーキ装置 |
| JP6505399B2 (ja) * | 2014-09-02 | 2019-04-24 | Ntn株式会社 | 車両ブレーキ装置用荷重センサ、電動式直動アクチュエータおよび電動ブレーキ装置 |
| JP6133360B2 (ja) | 2015-06-01 | 2017-05-24 | Ntn株式会社 | 電動ブレーキ装置 |
| JP6739262B2 (ja) * | 2016-07-07 | 2020-08-12 | Ntn株式会社 | 電動式直動アクチュエータおよび電動ブレーキ装置 |
| EP3473891A4 (en) * | 2016-06-16 | 2019-06-19 | NTN Corporation | ELECTRICAL LINEAR ACTUATOR AND ELECTRIC BRAKING DEVICE |
| WO2017221939A1 (ja) * | 2016-06-21 | 2017-12-28 | Ntn株式会社 | 電動ブレーキ装置 |
| JP6862115B2 (ja) * | 2016-07-13 | 2021-04-21 | Ntn株式会社 | 電動ブレーキ装置 |
| US11345043B2 (en) * | 2018-07-02 | 2022-05-31 | Flexiv Ltd. | Axial force sensor, robot gripper, and robot having the same |
| US11493407B2 (en) | 2018-09-28 | 2022-11-08 | Ge Avio S.R.L. | Torque measurement system |
| CN116068325B (zh) * | 2023-03-17 | 2023-07-18 | 西安交通大学城市学院 | 一种高低压配电柜负载检测装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57190436U (ja) * | 1981-05-28 | 1982-12-02 | ||
| JPS58201041A (ja) * | 1982-05-19 | 1983-11-22 | Mitsubishi Electric Corp | テ−プ張力検出装置 |
| JP2004301835A (ja) * | 2003-03-31 | 2004-10-28 | Robert Bosch Gmbh | 力測定のためのセンサ装置 |
| JP2006514306A (ja) * | 2003-05-07 | 2006-04-27 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 力測定素子 |
| JP2010265971A (ja) * | 2009-05-13 | 2010-11-25 | Akebono Brake Ind Co Ltd | 電動式ディスクブレーキ装置 |
| WO2011030839A1 (ja) | 2009-09-10 | 2011-03-17 | 曙ブレーキ工業株式会社 | 電動式ディスクブレーキ |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57190436A (en) | 1981-05-19 | 1982-11-24 | Fuji Electric Co Ltd | Adjusting method for optical transmitting line |
| US5355714A (en) * | 1992-02-26 | 1994-10-18 | Nippondenso Co., Ltd. | Pressure sensor using a pressure responsive magnetic film to vary inductance of a coil |
| JP3745107B2 (ja) * | 1997-08-28 | 2006-02-15 | Jfeアドバンテック株式会社 | ロードセル及びロードセルを備える荷重検出装置 |
| US6507187B1 (en) * | 1999-08-24 | 2003-01-14 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Ultra-sensitive magnetoresistive displacement sensing device |
| US7437943B2 (en) | 2003-05-07 | 2008-10-21 | Robert Bosch Gmbh | Force measurement element |
| JP5778513B2 (ja) | 2011-07-28 | 2015-09-16 | Ntn株式会社 | 直動アクチュエータ用の磁気式荷重センサおよび直動アクチュエータ |
| JP5735882B2 (ja) | 2011-08-02 | 2015-06-17 | Ntn株式会社 | 磁気式荷重センサ |
| JP5833405B2 (ja) | 2011-10-11 | 2015-12-16 | Ntn株式会社 | 直動アクチュエータ用の磁気式荷重センサおよび直動アクチュエータ |
-
2012
- 2012-07-11 JP JP2012155528A patent/JP5877134B2/ja active Active
-
2013
- 2013-07-09 EP EP13817176.4A patent/EP2873957B1/en active Active
- 2013-07-09 CN CN201380028576.2A patent/CN104428646B/zh active Active
- 2013-07-09 US US14/413,713 patent/US9528889B2/en active Active
- 2013-07-09 CN CN201710043598.6A patent/CN107063516A/zh active Pending
- 2013-07-09 WO PCT/JP2013/068724 patent/WO2014010582A1/ja active Application Filing
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57190436U (ja) * | 1981-05-28 | 1982-12-02 | ||
| JPS58201041A (ja) * | 1982-05-19 | 1983-11-22 | Mitsubishi Electric Corp | テ−プ張力検出装置 |
| JP2004301835A (ja) * | 2003-03-31 | 2004-10-28 | Robert Bosch Gmbh | 力測定のためのセンサ装置 |
| JP2006514306A (ja) * | 2003-05-07 | 2006-04-27 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 力測定素子 |
| JP2010265971A (ja) * | 2009-05-13 | 2010-11-25 | Akebono Brake Ind Co Ltd | 電動式ディスクブレーキ装置 |
| WO2011030839A1 (ja) | 2009-09-10 | 2011-03-17 | 曙ブレーキ工業株式会社 | 電動式ディスクブレーキ |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110168334A (zh) * | 2016-12-28 | 2019-08-23 | Ntn株式会社 | 载荷传感器以及电动制动装置 |
| CN110168334B (zh) * | 2016-12-28 | 2022-06-07 | Ntn株式会社 | 载荷传感器以及电动制动装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107063516A (zh) | 2017-08-18 |
| JP5877134B2 (ja) | 2016-03-02 |
| JP2014016307A (ja) | 2014-01-30 |
| EP2873957A4 (en) | 2015-09-02 |
| EP2873957B1 (en) | 2018-04-11 |
| US20150204736A1 (en) | 2015-07-23 |
| CN104428646B (zh) | 2017-02-22 |
| CN104428646A (zh) | 2015-03-18 |
| EP2873957A1 (en) | 2015-05-20 |
| US9528889B2 (en) | 2016-12-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5877134B2 (ja) | 磁気式荷重センサおよび電動ブレーキ装置 | |
| JP5833405B2 (ja) | 直動アクチュエータ用の磁気式荷重センサおよび直動アクチュエータ | |
| JP5778513B2 (ja) | 直動アクチュエータ用の磁気式荷重センサおよび直動アクチュエータ | |
| JP5947229B2 (ja) | 磁気式荷重センサおよび電動ブレーキ装置 | |
| JP5977016B2 (ja) | 電動式直動アクチュエータおよび電動ブレーキ装置 | |
| JP5676382B2 (ja) | 電動ブレーキ装置 | |
| JP5795908B2 (ja) | 電動ブレーキ装置 | |
| WO2016035610A1 (ja) | 荷重センサ、電動式直動アクチュエータおよび電動ブレーキ装置 | |
| JP6055125B2 (ja) | 直動アクチュエータ | |
| JP5865184B2 (ja) | 磁気式荷重センサおよび電動ブレーキ装置 | |
| JP6169676B2 (ja) | 磁気式荷重センサおよび電動ブレーキ装置 | |
| JP5876564B2 (ja) | 電動式直動アクチュエータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 13817176 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 14413713 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2013817176 Country of ref document: EP |