WO2013146716A1 - 超音波診断装置、画像処理装置及び画像処理方法 - Google Patents
超音波診断装置、画像処理装置及び画像処理方法 Download PDFInfo
- Publication number
- WO2013146716A1 WO2013146716A1 PCT/JP2013/058651 JP2013058651W WO2013146716A1 WO 2013146716 A1 WO2013146716 A1 WO 2013146716A1 JP 2013058651 W JP2013058651 W JP 2013058651W WO 2013146716 A1 WO2013146716 A1 WO 2013146716A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- volume data
- region
- lumen
- image
- data
- Prior art date
Links
- 238000012545 processing Methods 0.000 title claims description 78
- 238000003672 processing method Methods 0.000 title claims description 10
- 239000012530 fluid Substances 0.000 claims abstract description 126
- 238000001514 detection method Methods 0.000 claims abstract description 118
- 230000002159 abnormal effect Effects 0.000 claims description 30
- 238000002604 ultrasonography Methods 0.000 claims description 19
- 239000000284 extract Substances 0.000 claims description 7
- 238000003384 imaging method Methods 0.000 claims description 6
- 210000001519 tissue Anatomy 0.000 description 52
- 238000000034 method Methods 0.000 description 46
- 239000000523 sample Substances 0.000 description 44
- 238000010586 diagram Methods 0.000 description 33
- 230000005540 biological transmission Effects 0.000 description 32
- 230000004048 modification Effects 0.000 description 25
- 238000012986 modification Methods 0.000 description 25
- 238000002591 computed tomography Methods 0.000 description 21
- 230000008569 process Effects 0.000 description 18
- 230000017531 blood circulation Effects 0.000 description 17
- 210000004204 blood vessel Anatomy 0.000 description 17
- 238000009877 rendering Methods 0.000 description 16
- 238000006243 chemical reaction Methods 0.000 description 10
- 208000031481 Pathologic Constriction Diseases 0.000 description 6
- 239000006185 dispersion Substances 0.000 description 6
- 230000036262 stenosis Effects 0.000 description 6
- 208000037804 stenosis Diseases 0.000 description 6
- 238000002595 magnetic resonance imaging Methods 0.000 description 5
- 230000000747 cardiac effect Effects 0.000 description 4
- 238000013480 data collection Methods 0.000 description 4
- 239000011159 matrix material Substances 0.000 description 4
- 206010002329 Aneurysm Diseases 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 239000002872 contrast media Substances 0.000 description 3
- 108010076504 Protein Sorting Signals Proteins 0.000 description 2
- 206010057469 Vascular stenosis Diseases 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 2
- 210000000013 bile duct Anatomy 0.000 description 2
- 239000008280 blood Substances 0.000 description 2
- 210000004369 blood Anatomy 0.000 description 2
- 238000003745 diagnosis Methods 0.000 description 2
- 238000002059 diagnostic imaging Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000009499 grossing Methods 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 210000004798 organs belonging to the digestive system Anatomy 0.000 description 2
- 230000003321 amplification Effects 0.000 description 1
- 210000000941 bile Anatomy 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 201000010099 disease Diseases 0.000 description 1
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 1
- 238000003708 edge detection Methods 0.000 description 1
- 210000004907 gland Anatomy 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000012447 hatching Effects 0.000 description 1
- 238000002608 intravascular ultrasound Methods 0.000 description 1
- 210000002429 large intestine Anatomy 0.000 description 1
- 210000002751 lymph Anatomy 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000008722 morphological abnormality Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 238000012805 post-processing Methods 0.000 description 1
- 230000010349 pulsation Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000001172 regenerating effect Effects 0.000 description 1
- 230000000241 respiratory effect Effects 0.000 description 1
- 230000002966 stenotic effect Effects 0.000 description 1
- 239000000126 substance Substances 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
Images


















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/483—Diagnostic techniques involving the acquisition of a 3D volume of data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/02—Measuring pulse or heart rate
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/06—Measuring blood flow
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0891—Detecting organic movements or changes, e.g. tumours, cysts, swellings for diagnosis of blood vessels
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/461—Displaying means of special interest
- A61B8/466—Displaying means of special interest adapted to display 3D data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/488—Diagnostic techniques involving Doppler signals
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5215—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data
- A61B8/5223—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for extracting a diagnostic or physiological parameter from medical diagnostic data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5215—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data
- A61B8/523—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for generating planar views from image data in a user selectable plane not corresponding to the acquisition plane
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8979—Combined Doppler and pulse-echo imaging systems
- G01S15/8988—Colour Doppler imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/8993—Three dimensional imaging systems
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H50/00—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics
- G16H50/30—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics for calculating health indices; for individual health risk assessment
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/50—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications
- A61B6/504—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications for diagnosis of blood vessels, e.g. by angiography
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/52—Devices using data or image processing specially adapted for radiation diagnosis
- A61B6/5211—Devices using data or image processing specially adapted for radiation diagnosis involving processing of medical diagnostic data
- A61B6/5229—Devices using data or image processing specially adapted for radiation diagnosis involving processing of medical diagnostic data combining image data of a patient, e.g. combining a functional image with an anatomical image
- A61B6/5247—Devices using data or image processing specially adapted for radiation diagnosis involving processing of medical diagnostic data combining image data of a patient, e.g. combining a functional image with an anatomical image combining images from an ionising-radiation diagnostic technique and a non-ionising radiation diagnostic technique, e.g. X-ray and ultrasound
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/04—Measuring blood pressure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0833—Detecting organic movements or changes, e.g. tumours, cysts, swellings involving detecting or locating foreign bodies or organic structures
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0883—Detecting organic movements or changes, e.g. tumours, cysts, swellings for diagnosis of the heart
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
- A61B8/4245—Details of probe positioning or probe attachment to the patient involving determining the position of the probe, e.g. with respect to an external reference frame or to the patient
- A61B8/4254—Details of probe positioning or probe attachment to the patient involving determining the position of the probe, e.g. with respect to an external reference frame or to the patient using sensors mounted on the probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/461—Displaying means of special interest
- A61B8/463—Displaying means of special interest characterised by displaying multiple images or images and diagnostic data on one display
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/486—Diagnostic techniques involving arbitrary m-mode
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5207—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of raw data to produce diagnostic data, e.g. for generating an image
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5215—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data
- A61B8/5238—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for combining image data of patient, e.g. merging several images from different acquisition modes into one image
- A61B8/5246—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for combining image data of patient, e.g. merging several images from different acquisition modes into one image combining images from the same or different imaging techniques, e.g. color Doppler and B-mode
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5215—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data
- A61B8/5238—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for combining image data of patient, e.g. merging several images from different acquisition modes into one image
- A61B8/5261—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data for combining image data of patient, e.g. merging several images from different acquisition modes into one image combining images from different diagnostic modalities, e.g. ultrasound and X-ray
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/54—Control of the diagnostic device
- A61B8/543—Control of the diagnostic device involving acquisition triggered by a physiological signal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52053—Display arrangements
- G01S7/52057—Cathode ray tube displays
- G01S7/52074—Composite displays, e.g. split-screen displays; Combination of multiple images or of images and alphanumeric tabular information
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/52—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00
- G01S7/52017—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S15/00 particularly adapted to short-range imaging
- G01S7/52085—Details related to the ultrasound signal acquisition, e.g. scan sequences
- G01S7/52087—Details related to the ultrasound signal acquisition, e.g. scan sequences using synchronization techniques
Definitions
- Embodiments described herein relate generally to an ultrasonic diagnostic apparatus, an image processing apparatus, and an image processing method.
- a virtual endoscopy (VE) image fly-through (Flythrough) using three-dimensional medical image data (volume data) including a luminal tissue is used.
- the display is known.
- a VE image is an image generated from volume data by a perspective projection method using a viewpoint and a line-of-sight direction set in a lumen.
- fly-through display is a display method in which a VE image with a different viewpoint position is displayed as a moving image by moving the viewpoint along the center line (core line) of the lumen.
- the fly-through display is mainly performed on volume data including a digestive organ such as a large intestine acquired by an X-ray CT (Computed Tomography) apparatus or a magnetic resonance imaging (MRI) apparatus.
- X-ray CT Computed Tomography
- MRI magnetic resonance imaging
- an ultrasonic diagnostic apparatus that generates volume data substantially in real time along a time series using an ultrasonic probe capable of three-dimensional ultrasonic scanning has been put into practical use. For this reason, in the field of ultrasonic examination, the introduction of fly-through display using B-mode volume data including a luminal tissue is being promoted. However, the ultrasonic diagnostic apparatus is unsuitable for observing organs such as digestive organs that are not filled with moisture or substance due to its nature. For this reason, the application range of the fly-through display by the ultrasonic diagnostic apparatus is a lumen filled with fluid such as a blood vessel filled with blood or a bile duct filled with bile.
- the ultrasound diagnostic equipment Compared to other medical diagnostic imaging equipment such as X-ray CT equipment and MRI equipment, the ultrasound diagnostic equipment has excellent ability to draw fine structures and is useful for observation of the circulatory system centering on blood vessels.
- This is a diagnostic imaging apparatus.
- blood vessel fly-through display using an ultrasonic diagnostic apparatus is useful as a new observation technique for circulatory diseases, particularly vascular stenosis and aneurysms.
- the inner wall of the lumen becomes a clip region to be rendered.
- the ultrasonic image (B-mode image) has a strong tendency to blur the outline between structures compared to other medical images such as an X-ray CT image and an MRI image. For this reason, if the thickness of the lumen is not more than a certain level, it is difficult to detect the lumen region of the lumen from the B-mode volume data by automatic processing using a program. For this reason, at present, the fly-through display in the ultrasonic diagnostic apparatus is limited to a tubular tissue having a certain thickness and is difficult to apply to a thin tubular tissue.
- the problem to be solved by the present invention is to provide an ultrasonic diagnostic apparatus, an image processing apparatus, and an image processing method capable of easily detecting a lumen area of a lumen.
- the ultrasonic diagnostic apparatus includes an acquisition unit and a detection unit.
- the acquisition unit acquires fluid volume data indicating fluid information relating to a fluid flowing in a region that is three-dimensionally scanned by ultrasonic waves.
- the detection unit detects a region where a fluid exists in the region using the fluid information, and detects a lumen region of a lumen in the volume data to be image processed using the detected region.
- FIG. 1 is a block diagram illustrating a configuration example of the ultrasonic diagnostic apparatus according to the first embodiment.
- FIG. 2 is a diagram (1) for explaining the detection unit according to the first embodiment.
- FIG. 3 is a diagram (2) for explaining the detection unit according to the first embodiment.
- FIG. 4 is a diagram (3) for explaining the detection unit according to the first embodiment.
- FIG. 5 is a diagram (4) for explaining the detection unit according to the first embodiment.
- FIG. 6 is a diagram (1) for explaining the image generation unit according to the first embodiment.
- FIG. 7A is a diagram (2) for explaining the image generation unit according to the first embodiment.
- FIG. 7B is a diagram (3) for explaining the image generation unit according to the first embodiment.
- FIG. 7C is a diagram (4) for explaining the image generation unit according to the first embodiment.
- FIG. 7A is a diagram (2) for explaining the image generation unit according to the first embodiment.
- FIG. 7B is a diagram (3) for explaining the image generation unit according to the first embodiment.
- FIG. 8 is a flowchart for explaining a processing example of the ultrasonic diagnostic apparatus according to the first embodiment.
- FIG. 9 is a block diagram illustrating a configuration example of an ultrasonic diagnostic apparatus according to the second embodiment.
- FIG. 10 is a diagram for explaining an acquisition unit and a detection unit according to the second embodiment.
- FIG. 11 is a flowchart for explaining a processing example of the ultrasonic diagnostic apparatus according to the second embodiment.
- FIG. 12 is a diagram for explaining a detection unit according to the third embodiment.
- FIG. 13 is a diagram (1) for explaining the image generation unit according to the third embodiment.
- FIG. 14 is a diagram (2) for explaining the image generation unit according to the third embodiment.
- FIG. 15 is a diagram (3) for explaining the image generation unit according to the third embodiment.
- FIG. 16 is a flowchart for explaining a processing example of the ultrasonic diagnostic apparatus according to the third embodiment.
- FIG. 17 is a diagram for explaining the first modification.
- FIG. 18 is a diagram for
- FIG. 1 is a block diagram illustrating a configuration example of the ultrasonic diagnostic apparatus according to the first embodiment.
- the ultrasonic diagnostic apparatus according to the present embodiment includes an ultrasonic probe 1, a monitor 2, an input device 3, and an apparatus main body 10.
- the ultrasonic probe 1 includes a plurality of piezoelectric vibrators, and the plurality of piezoelectric vibrators generate ultrasonic waves based on a drive signal supplied from a transmission / reception unit 11 included in the apparatus main body 10 described later.
- the ultrasonic probe 1 receives a reflected wave from the subject P and converts it into an electrical signal.
- the ultrasonic probe 1 includes a matching layer provided in the piezoelectric vibrator, a backing material that prevents propagation of ultrasonic waves from the piezoelectric vibrator to the rear, and the like.
- the ultrasonic probe 1 is detachably connected to the apparatus main body 10.
- the transmitted ultrasonic waves are transmitted from the ultrasonic probe 1 to the subject P
- the transmitted ultrasonic waves are reflected one after another at the discontinuous surface of the acoustic impedance in the body tissue of the subject P
- the ultrasonic probe is used as a reflected wave signal. 1 is received by a plurality of piezoelectric vibrators.
- the amplitude of the received reflected wave signal depends on the difference in acoustic impedance at the discontinuous surface where the ultrasonic wave is reflected.
- the reflected wave signal when the transmitted ultrasonic pulse is reflected by the moving blood flow or the surface of the heart wall depends on the velocity component of the moving object in the ultrasonic transmission direction due to the Doppler effect. And undergoes a frequency shift.
- the ultrasound probe 1 according to the first embodiment is an ultrasound probe capable of scanning the subject P in two dimensions with ultrasound and scanning the subject P in three dimensions.
- the ultrasonic probe 1 according to the first embodiment scans the subject P two-dimensionally with a plurality of piezoelectric vibrators arranged in a row, and moves the plurality of piezoelectric vibrators at a predetermined angle. It is a mechanical 4D probe that scans the subject P in three dimensions by oscillating at (oscillation angle).
- the ultrasonic probe 1 according to the first embodiment is a 2D probe capable of ultrasonically scanning the subject P in three dimensions by arranging a plurality of piezoelectric vibrators in a matrix. Note that the 2D probe can also scan the subject P in two dimensions by focusing and transmitting ultrasonic waves.
- the input device 3 includes a mouse, a keyboard, a button, a panel switch, a touch command screen, a foot switch, a trackball, a joystick, etc., receives various setting requests from an operator of the ultrasonic diagnostic apparatus, The various setting requests received are transferred.
- the monitor 2 displays a GUI (Graphical User Interface) for an operator of the ultrasonic diagnostic apparatus to input various setting requests using the input device 3, and displays an ultrasonic image generated in the apparatus main body 10. To do.
- GUI Graphic User Interface
- the apparatus main body 10 is an apparatus that generates ultrasonic image data based on a reflected wave signal received by the ultrasonic probe 1.
- the apparatus main body 10 according to the first embodiment is an apparatus that can generate three-dimensional ultrasonic image data based on three-dimensional reflected wave data received by the ultrasonic probe 1.
- volume data the three-dimensional ultrasonic image data is referred to as “volume data”.
- the apparatus main body 10 includes a transmission / reception unit 11, a B-mode processing unit 12, a Doppler processing unit 13, an image generation unit 14, an image memory 15, a control unit 16, and an internal storage unit 17. And have.
- the transmission / reception unit 11 includes a pulse generator, a transmission delay unit, a pulser, and the like, and supplies a drive signal to the ultrasonic probe 1.
- the pulse generator repeatedly generates rate pulses for forming transmission ultrasonic waves at a predetermined rate frequency.
- the transmission delay unit generates a delay time for each piezoelectric vibrator necessary for focusing the ultrasonic wave generated from the ultrasonic probe 1 into a beam and determining transmission directivity. Give for each rate pulse.
- the pulser applies a drive signal (drive pulse) to the ultrasonic probe 1 at a timing based on the rate pulse. That is, the transmission delay unit arbitrarily adjusts the transmission direction of the ultrasonic wave transmitted from the piezoelectric vibrator surface by changing the delay time given to each rate pulse.
- the transmission / reception unit 11 has a function capable of instantaneously changing a transmission frequency, a transmission drive voltage, and the like in order to execute a predetermined scan sequence based on an instruction from the control unit 16 described later.
- the change of the transmission drive voltage is realized by a linear amplifier type transmission circuit capable of instantaneously switching the value or a mechanism for electrically switching a plurality of power supply units.
- the transmission / reception unit 11 includes a preamplifier, an A / D (Analog / Digital) converter, a reception delay unit, an adder, and the like.
- the transmission / reception unit 11 performs various processing on the reflected wave signal received by the ultrasonic probe 1 and reflects it. Generate wave data.
- the preamplifier amplifies the reflected wave signal for each channel.
- the A / D converter A / D converts the amplified reflected wave signal.
- the reception delay unit gives a delay time necessary for determining the reception directivity.
- the adder performs an addition process on the reflected wave signal processed by the reception delay unit to generate reflected wave data. By the addition processing of the adder, the reflection component from the direction corresponding to the reception directivity of the reflected wave signal is emphasized, and a comprehensive beam for ultrasonic transmission / reception is formed by the reception directivity and the transmission directivity.
- the transmitting / receiving unit 11 transmits a three-dimensional ultrasonic beam from the ultrasonic probe 1 in order to three-dimensionally scan the subject P.
- the transmitter / receiver 11 according to the first embodiment generates three-dimensional reflected wave data from the three-dimensional reflected wave signal received by the ultrasonic probe 1.
- the form of the output signal from the transmitter / receiver 11 can be selected from various forms such as a signal including phase information called an RF (Radio Frequency) signal or amplitude information after envelope detection processing. Is possible.
- RF Radio Frequency
- the B-mode processing unit 12 receives the reflected wave data from the transmission / reception unit 11, performs logarithmic amplification, envelope detection processing, and the like, and generates data (B-mode data) in which the signal intensity is expressed by brightness. .
- the Doppler processing unit 13 performs frequency analysis on velocity information from the reflected wave data received from the transmission / reception unit 11, extracts blood flow, tissue, and contrast agent echo components due to the Doppler effect, and obtains moving body information such as velocity, dispersion, and power. Data extracted for multiple points (Doppler data) is generated.
- the moving body of the present embodiment is a fluid such as blood that flows in the lumen.
- the B-mode processing unit 12 and the Doppler processing unit 13 can process both two-dimensional reflected wave data and three-dimensional reflected wave data. That is, the B-mode processing unit 12 generates two-dimensional B-mode data from the two-dimensional reflected wave data, and generates three-dimensional B-mode data from the three-dimensional reflected wave data.
- the Doppler processing unit 13 generates two-dimensional Doppler data from the two-dimensional reflected wave data, and generates three-dimensional Doppler data from the three-dimensional reflected wave data.
- the three-dimensional B-mode data is data to which a luminance value corresponding to the reflection intensity of the reflection source located at each of a plurality of points set on each scanning line in the three-dimensional scanning range is assigned.
- the three-dimensional Doppler data includes data in which a luminance value corresponding to the value of blood flow information (speed, dispersion, power) is assigned to each of a plurality of points set on each scanning line in the three-dimensional scanning range. Become.
- the image generation unit 14 generates ultrasonic image data from the data generated by the B mode processing unit 12 and the Doppler processing unit 13. That is, the image generation unit 14 generates B-mode image data in which the intensity of the reflected wave is expressed by luminance from the two-dimensional B-mode data generated by the B-mode processing unit 12.
- the B-mode image data is data in which the tissue shape in the ultrasonically scanned region is depicted.
- the image generation unit 14 generates Doppler image data representing moving body information from the two-dimensional Doppler data generated by the Doppler processing unit 13.
- the Doppler image data is a speed image, a dispersion image, a power image, or a combination of these.
- the Doppler image data is data indicating fluid information regarding the fluid flowing in the ultrasonically scanned region.
- the image generation unit 14 generally converts (scan converts) a scanning line signal sequence of ultrasonic scanning into a scanning line signal sequence of a video format represented by a television or the like, and displays ultrasonic waves for display. Generate image data. Specifically, the image generation unit 14 generates ultrasonic image data for display by performing coordinate conversion in accordance with the ultrasonic scanning mode of the ultrasonic probe 1. In addition to the scan conversion, the image generation unit 14 performs various image processing, such as image processing (smoothing processing) for regenerating an average luminance image using a plurality of image frames after scan conversion, Image processing (edge enhancement processing) using a differential filter is performed in the image. In addition, the image generation unit 14 synthesizes character information, scales, body marks, and the like of various parameters with the ultrasound image data.
- image processing smoothing processing
- Image processing edge enhancement processing
- the B-mode data and the Doppler data are ultrasonic image data before the scan conversion process, and the data generated by the image generation unit 14 is ultrasonic image data for display after the scan conversion process.
- the B-mode data and Doppler data are also called raw data.
- the three-dimensional B-mode data and the three-dimensional B-mode data are also called volume data.
- the image generation unit 14 performs coordinate conversion on the three-dimensional B-mode data generated by the B-mode processing unit 12 to generate three-dimensional B-mode image data.
- the image generation unit 14 generates three-dimensional Doppler image data by performing coordinate conversion on the three-dimensional Doppler data generated by the Doppler processing unit 13.
- the image generation unit 14 generates “three-dimensional B-mode image data or three-dimensional Doppler image data” as “volume data that is three-dimensional ultrasound image data”.
- B-mode volume data three-dimensional Doppler image data
- Doppler volume data three-dimensional Doppler image data
- the B-mode volume data is tissue volume data indicating a tissue shape in an area that is three-dimensionally scanned by ultrasonic waves.
- the Doppler volume data is fluid volume data indicating fluid information relating to a fluid flowing in a region that is three-dimensionally scanned by ultrasonic waves.
- the image generation unit 14 performs a rendering process on the volume data in order to generate various two-dimensional image data for displaying the volume data on the monitor 2.
- the rendering processing performed by the image generation unit 14 includes processing for generating MPR image data from volume data by performing a cross-section reconstruction method (MPR: Multi Planer Reconstruction).
- MPR Multi Planer Reconstruction
- the rendering process performed by the image generation unit 14 includes a process of performing “Curved MPR” on volume data and a process of performing “Maximum Intensity Projection” on volume data.
- the rendering processing performed by the image generation unit 14 includes volume rendering (VR) processing that generates two-dimensional image data reflecting three-dimensional information.
- the image generation unit 14 can generate a virtual endoscope (VE) image for fly-through display by performing a perspective projection method as volume rendering processing.
- VE virtual endoscope
- Image display methods using Doppler data are generally roughly classified into a color Doppler method (CDI: Color Doppler Imaging) and a power Doppler method (PDI: Power Doppler Imaging).
- the image generation unit 14 generates color Doppler image data in which the hue is changed according to the direction of blood flow and the magnitude of blood flow velocity. For example, the image generation unit 14 assigns a red color (red to yellow) to the blood flow in the direction toward the ultrasonic probe 1 according to the velocity of the blood flow.
- Color Doppler image data is generated by assigning a bluish hue (blue to blue-green) to the blood flow in the direction of moving away according to the velocity of the blood flow.
- the image generation unit 14 may generate color Doppler image data for performing speed-dispersion display in which dispersion information is combined with speed information.
- the image generation unit 14 generates power image data in which, for example, a red hue, lightness, or saturation is changed according to the power value that is the intensity of the Doppler signal.
- the image generation unit 14 When performing the color Doppler method by three-dimensional scanning, the image generation unit 14 generates color Doppler volume data as Doppler volume data from the three-dimensional Doppler data.
- the image generation unit 14 converts power volume data obtained by mapping the power value, which is the intensity of the Doppler signal, into the three-dimensional space as Doppler volume data from the three-dimensional Doppler data. Generate.
- the image generation unit 14 sequentially generates color Doppler volume data and power volume data in time series.
- the detection accuracy in the range where blood flow exists depends on the relative direction between the blood flow direction and the ultrasonic probe 1. Specifically, in the color Doppler method, blood flow detection accuracy in a direction orthogonal to the direction of the ultrasonic beam is lowered. On the other hand, in the power Doppler method, information on the direction and velocity of the blood flow cannot be detected, but the range where the blood flow exists can be detected without depending on the relative position between the blood flow direction and the ultrasonic probe 1. it can.
- the Doppler image data is usually superimposed on the B-mode image data and output to the monitor 2.
- the transmission / reception unit 11 performs B-mode scanning that transmits and receives an ultrasonic beam once with one scanning line, and transmits and receives an ultrasonic beam multiple times with one scanning line.
- the Doppler mode scan to be performed is performed in parallel.
- the Doppler processing unit 13 generates Doppler data by performing MTI filter processing, autocorrelation calculation processing, and speed / dispersion / power estimation processing on a plurality of reflected wave data of the same scanning line.
- the image memory 15 shown in FIG. 1 is a memory for storing image data for display generated by the image generation unit 14.
- the image memory 15 can also store data generated by the B-mode processing unit 12 and the Doppler processing unit 13.
- the B-mode data and Doppler data stored in the image memory 15 can be called by an operator after diagnosis, for example, and become ultrasonic image data for display via the image generation unit 14.
- the internal storage unit 17 stores various data such as a control program for performing ultrasonic transmission / reception, image processing and display processing, diagnostic information (for example, patient ID, doctor's findings, etc.), diagnostic protocol, and various body marks. To do.
- the internal storage unit 17 is also used for storing image data stored in the image memory 15 as necessary. The data stored in the internal storage unit 17 can be transferred to an external device via an interface (not shown).
- the control unit 16 controls the entire processing of the ultrasonic diagnostic apparatus. Specifically, the control unit 16 is based on various setting requests input from the operator via the input device 3 and various control programs and various data read from the internal storage unit 17. The processing of the processing unit 12, the Doppler processing unit 13, and the image generation unit 14 is controlled. Further, the control unit 16 controls the display 2 to display the ultrasonic image data for display stored in the image memory 15 and the internal storage unit 17. As shown in FIG. 1, the control unit 16 according to the first embodiment includes an acquisition unit 16a and a detection unit 16b. The acquisition unit 16a and the detection unit 16b will be described in detail later.
- the ultrasonic diagnostic apparatus according to the first embodiment generates B-mode volume data by performing a three-dimensional scan of an area including a lumen filled with fluid.
- the lumen filled with fluid include blood vessels, bile ducts, lymph glands, and the like.
- the ultrasound diagnostic apparatus according to the first embodiment generates various image data for observing the inner wall of the lumen using the B-mode volume data. For example, the ultrasonic diagnostic apparatus according to the first embodiment moves the viewpoint along the center line (core line) of the lumen and moves the viewpoint along the center line (core line) of the lumen, and the VE images having different viewpoint positions are obtained.
- a lumen through display By sequentially generating and displaying, a lumen through display is performed.
- the operator inserts an endoscope into the subject P, or inserts a transducer catheter into the blood vessel of the subject P in an intravascular ultrasound (IVUS).
- IVUS intravascular ultrasound
- the lumen can be observed from the inside.
- the inner wall of the lumen becomes a clip region to be rendered.
- the B-mode image has a strong tendency to blur the outline between structures compared to other medical images such as an X-ray CT image and an MRI image. For this reason, if the thickness of the lumen is not more than a certain level, it is difficult to detect the lumen region of the lumen from the B-mode volume data by automatic processing using a program. In particular, in the case of a blood vessel in which movement due to pulsation is intense, the contour of the blood vessel is often further blurred. For this reason, at present, the clip region cannot be detected unless the thickness of the lumen is more than a certain level. For this reason, the fly-through display in the conventional ultrasonic diagnostic apparatus is limited to a tubular tissue having a certain thickness, and is difficult to apply to a thin tubular tissue.
- the processing of the acquisition unit 16a and the detection unit 16b described below is performed in order to easily detect the lumen region of the lumen.
- the acquisition unit 16a acquires fluid volume data indicating fluid information relating to a fluid flowing in a region that is three-dimensionally scanned by ultrasonic waves. Then, the detection unit 16b detects a region where the fluid exists in the region using the fluid information, and detects the lumen region of the lumen in the volume data to be image-processed using the detected region. In the first embodiment, the acquisition unit 16a further acquires tissue volume data indicating the tissue shape in the region as the volume data to be image processed. Specifically, in the first embodiment, the acquisition unit 16a acquires tissue volume data generated by three-dimensionally scanning the above-described region with ultrasound as tissue volume data.
- the acquisition unit 16a relates to tissue volume data indicating a tissue shape in a region that is three-dimensionally scanned by ultrasonic waves, and a fluid that flows in the region that is three-dimensionally scanned by ultrasonic waves.
- Fluid volume data indicating fluid information is acquired.
- the detection part 16b which concerns on 1st Embodiment detects the area
- a scan for the Doppler mode is also performed in addition to the scan for the B mode.
- a B mode scan and a Doppler mode scan are performed on the same region.
- the operator brings the ultrasonic probe 1 into contact with the subject P at a position where the three-dimensional scanning of the region including the lumen to be observed is possible. Then, the operator gives an instruction to perform the three-dimensional scanning for the B mode and the three-dimensional scanning for the Doppler mode in parallel. Thereby, the transmission / reception unit 11 generates the three-dimensional reflected wave data for the B mode and the three-dimensional reflected wave data for the Doppler mode.
- the B mode processing unit 12 generates 3D B mode data from the 3D reflected wave data for B mode
- the Doppler processing unit 13 generates 3D Doppler data from the 3D reflected wave data for Doppler mode.
- the image generation unit 14 generates B-mode volume data from the three-dimensional B-mode data, and generates Doppler volume data from the three-dimensional Doppler data.
- the detection accuracy of a range where a fluid such as a blood flow exists is higher in PDI than in CDI. Therefore, the operator instructs to collect power volume data as Doppler volume data. That is, the image generation unit 14 generates power volume data.
- the first embodiment may be a case where color Doppler volume data is collected, for example, if it is determined that the detection accuracy of the range in which blood flow exists does not decrease depending on the traveling direction of the lumen. .
- three-dimensional scanning is performed once to generate B-mode volume data and power volume data of the same time phase one by one.
- the acquisition unit 16a acquires B-mode volume data and power volume data of the same time phase stored in the image memory 15, and transmits them to the detection unit 16b.
- three-dimensional scanning may be performed a plurality of times to generate a plurality of B-mode volume data and power volume data in time series.
- the operator designates B-mode volume data suitable for observation with reference to the MPR images of each of the collected B-mode volume data.
- the acquisition unit 16a acquires the B-mode volume data designated by the operator and the power volume data collected at the same time as the B-mode volume data, and transmits them to the detection unit 16b.
- the detection unit 16b detects the region where the fluid exists in the region using the fluid information of the fluid volume data, and uses the detected region to detect the lumen contained in the tissue volume data. Detect the lumen area. In the first embodiment, the detection unit 16b detects a region where a fluid is present using position information of a voxel to which a luminance value is assigned when power is detected in the power volume data.
- the power volume data is data in which a value for rendering a color corresponding to a power value, which is one of fluid information, is given to a voxel corresponding to a position where the fluid exists.
- the detection unit 16b can detect a region where a fluid exists from the power volume data. Further, the B mode volume data and the power volume data are generated using the same coordinate system. That is, “coordinates of the region where the fluid exists” detected from the power volume data becomes “coordinates of the region where the fluid exists” in the B-mode volume data.
- the region where the fluid exists is a region where the fluid flowing in the lumen of the lumen exists, and is a lumen region of the lumen included in the B-mode volume data.
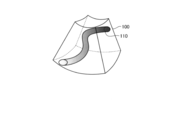
- FIGS. 2 to 5 are diagrams for explaining the detection unit according to the first embodiment.
- the detection unit 16b detects the fluid region 110 that is a “region where fluid exists” in the power volume data 100 illustrated in FIG. Specifically, the detection unit 16 b detects the coordinates of the voxels that form the contour of the fluid region 110.
- the processing performed by the detection unit 16b will be described with reference to FIGS.
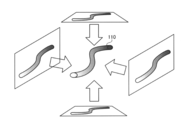
- the detection unit 16b detects the surface coordinates of the fluid region 110 using surface rendering, which is one of the rendering methods.
- Surface rendering is a rendering technique that projects only the voxel whose line of sight first hits the volume when viewing volume data from the viewpoint direction. That is, by performing surface rendering from a plurality of viewpoints, the position of the surface of an object existing in the volume can be acquired.
- the detection unit 16b sets a plurality of viewpoints with respect to the power volume data 100, and sets a line-of-sight direction from each viewpoint toward the center and the center of gravity of the power volume data 100. And the detection part 16b detects the coordinate of the surface of the fluid area
- the surface rendering process for the power volume data 100 may be performed by the detection unit 16b, or may be performed by the image generation unit 14 under the control of the detection unit 16b.
- the detection unit 16b detects the coordinates of the surface of the fluid region 110 using MPR, which is one of rendering techniques. That is, the detection unit 16 b sets a plurality of parallel cross sections for the power volume data 100. As illustrated in FIG. 4, the contour of the fluid region 110 is drawn on each of the plurality of MPR images reconstructed from the power volume data 100 by the set plurality of cross sections. The detection unit 16b detects the contour of the fluid region 110 in each MPR image, and detects the coordinates of the surface of the fluid region 110 by combining the detected contours for each MPR image. Note that the MPR process for the power volume data 100 may be performed by the detection unit 16b, or may be performed by the image generation unit 14 under the control of the detection unit 16b.
- various methods such as a region expansion method can be used for the detection process of the fluid region 110.
- the detection unit 16 b uses the detected surface (contour) coordinates of the fluid region 110 as the surface (contour) of the lumen region 210 in the B-mode volume data 200 received from the acquisition unit 16 a. Detect as coordinates.
- the surface of the lumen region 210 becomes the inner wall of the lumen region 210.
- the detection unit 16b sets the surface of the lumen region 210 as a clip region.
- the detection unit 16b may perform post-processing such as smoothing filter processing on the surface of the detected fluid region 110 or the surface of the lumen region 210 for the purpose of noise reduction or the like.
- the image generation unit 14 generates image data to be displayed on the monitor 2 from the tissue volume data (B-mode volume data), with the surface of the lumen region detected by the detection unit 16b as a processing target.
- 6, 7A, 7B, and 7C are diagrams for explaining the image generation unit according to the first embodiment.
- the image generation unit 14 generates a projection image obtained by projecting the tissue volume data from the viewpoint set inside the lumen as image data to be displayed on the monitor 2 based on the lumen region detected by the detection unit 16b. Specifically, the image generation unit 14 extracts the center line of the lumen from the data obtained by removing the lumen region from the tissue volume data, and monitors a plurality of projection images whose viewpoints are moved along the center line. 2 is generated as an image data group to be displayed as a moving image. For example, the image generation unit 14 extracts the center line 211 of the lumen region 210 as shown in FIG. Then, as illustrated in FIG.
- the image generation unit 14 generates a VE image from the clip region (the contour of the lumen region 210) using the viewpoint set along the center line 211.
- the image generation unit 14 sequentially generates VE images for fly-through display by moving the viewpoint along the center line 211.
- the image generation unit 14 generates MPR image data A in which the lumen region 210 is cut by a cross section orthogonal to the center line 211.
- the image generation unit 14 generates Curved MPR image data B obtained by cutting the lumen region 210 with a cross section (curved surface) including the entire center line 211.
- the image generation unit 14 generates expanded image data D obtained by opening the lumen region 210 by a curve C where a cross section including the entire center line 211 and the contour of the lumen region 210 intersect. Generate. The operator can also observe the shape of the inner wall of the lumen region 210 by referring to the image data exemplified in FIGS. 7A, 7B, and 7C on the monitor 2.
- FIG. 8 is a flowchart for explaining a processing example of the ultrasonic diagnostic apparatus according to the first embodiment.
- the ultrasonic diagnostic apparatus determines whether or not a three-dimensional scanning start request has been received (step S101). If the three-dimensional scanning start request is not accepted (No at Step S101), the ultrasonic diagnostic apparatus waits until a three-dimensional scanning start request is accepted.
- the ultrasonic probe 1 performs three-dimensional scanning of ultrasonic waves under the control of the control unit 16, and the transmission / reception unit 11 performs three-dimensional reflected waves. Data is collected (step S102). Note that the ultrasonic probe 1 performs the three-dimensional scanning for the B mode and the three-dimensional scanning for the Doppler mode in parallel. In addition, the transmission / reception unit 11 generates B-dimensional three-dimensional reflected wave data and Doppler mode three-dimensional reflected wave data.
- the image generation unit 14 generates B-mode volume data and power volume data (step S103). Then, the acquisition unit 16a acquires B-mode volume data and power volume data (step S104) and transfers them to the detection unit 16b.
- the detection unit 16b detects the clip area that is the surface of the lumen area of the lumen using the power volume data (step S105), and sets the clip area in the B-mode volume data (step S106).
- the image generation unit 14 generates image data for display from the B-mode volume data using the clip area (step S107). Then, under the control of the control unit 16, the monitor 2 displays the image data (step S108) and ends the process.
- the clip area detection processing of B-mode volume data necessary for observing the inner wall of the lumen is performed using Doppler volume data in the same area as the B-mode volume data. To do. That is, in the first embodiment, the clip region can be detected with high accuracy without depending on the thickness of the lumen as long as the fluid can be detected by the Doppler mode. Therefore, in the first embodiment, the lumen area of the lumen can be easily detected.
- the clip region can be detected with high accuracy without depending on the thickness of the lumen, for example, the application range of vascular stenosis search using fly-through display or the like is expanded. be able to.
- the clip region can be detected with high accuracy without using the contrast agent, and thus the burden on the subject P is reduced. can do.
- FIG. 9 is a block diagram illustrating a configuration example of an ultrasonic diagnostic apparatus according to the second embodiment
- FIG. 10 is a diagram for explaining an acquisition unit and a detection unit according to the second embodiment.
- Doppler mode data collection requires more computation than B mode data collection. Therefore, in order to improve the temporal resolution and spatial resolution of the image data in the Doppler mode, the B mode data collection and the Doppler mode data collection are separately performed while the position of the ultrasonic probe 1 is fixed. It is desirable. However, in order to detect the clip area of B-mode volume data using Doppler volume data collected at different times, it is necessary that the two volume data to be detected are data collected at the same time phase. is there.
- the ultrasonic diagnostic apparatus includes an apparatus main body 10 having the same configuration as the ultrasonic diagnostic apparatus according to the first embodiment illustrated in FIG. 1.
- the difference is that the electrocardiograph 4 is connected.
- the electrocardiograph 4 acquires an electrocardiogram (ECG: Electrocardiogram) of the subject P as a biological signal of the subject P (subject P to be three-dimensionally scanned) from which data is collected.
- ECG Electrocardiogram
- the electrocardiograph 4 transmits the acquired electrocardiogram waveform to the apparatus main body 10.
- the acquisition unit 16a collects the subject P (the subject P that has been three-dimensionally scanned).
- the tissue volume data and the fluid volume data of the same time phase are acquired using the biosignal.
- the detection part 16b detects a lumen
- the ultrasound probe 1 performs B-mode three-dimensional scanning in order to collect a plurality of volumes of B-mode volume data, which is tissue volume data, in time series.
- the ultrasonic probe 1 performs three-dimensional scanning for Doppler mode in order to collect a plurality of volumes of power volume data, which is fluid volume data, in time series.
- the transmission / reception unit 11 causes the ultrasonic probe 1 to perform three-dimensional scanning for the Doppler mode using a scan sequence with optimal time resolution and spatial resolution.
- the image generation unit 14 stores the volume data and the time of the ultrasonic scanning performed for generating the volume data in the image memory 15 in association with the electrocardiogram waveform transmitted from the electrocardiograph 4. To do.
- the acquisition unit 16a can acquire a cardiac time phase at the time of ultrasonic scanning performed to generate volume data by referring to the data stored in the image memory 15.
- the acquisition unit 16a acquires B-mode volume data and power volume data of the same cardiac phase from the image memory 15. In the example illustrated in FIG. 10, the acquisition unit 16a acquires R-wave B-mode volume data and power volume data. Note that the time phase to be acquired by the acquisition unit 16a may be performed by an operator or may be initially set.
- the detection unit 16b detects the clip region (the surface of the lumen region) from the R-wave power volume data, and sets the detected clip region as the R-wave B-mode volume data. Then, the image generation unit 14 generates display image data using the clip area set in the R-wave B-mode volume data.
- the three-dimensional scan for the B mode may be performed after the three-dimensional scan for the Doppler mode is performed.
- color Doppler volume data may be collected as fluid volume data, as in the first embodiment.
- tissue volume data and fluid volume data of the same cardiac phase are acquired for a plurality of time phases (for example, R wave, P wave), and a clip region is obtained at each time phase. It may be a case of detection.
- a PCG (phonocardiogram) waveform or a respiratory signal may be used in addition to ECG as a biological signal for determining the time phase.
- FIG. 11 is a flowchart for explaining a processing example of the ultrasonic diagnostic apparatus according to the second embodiment.
- the ultrasonic diagnostic apparatus determines whether or not a B-mode scan start request has been received (step S201). If the B-mode scan start request is not received (No at step S201), the ultrasound diagnostic apparatus waits until a B-mode scan start request is received.
- step S201 when a B-mode scan start request is received (Yes in step S201), the control of the control unit 16 causes the ultrasonic probe 1 to start ultrasonic three-dimensional scanning according to the B-mode scan sequence.
- the unit 16 starts collecting an electrocardiogram waveform.
- the transmission / reception unit 11 collects three-dimensional reflected wave data (step S202).
- the transmission / reception unit 11 generates B-mode three-dimensional reflected wave data.
- the image generation unit 14 generates B-mode volume data (step S203), and the control unit 16 determines whether or not a Doppler mode scan start request has been received (step S204). If the Doppler mode scan start request is not accepted (No at Step S204), the ultrasound diagnostic apparatus returns to Step 202 and continues to collect the three-dimensional reflected wave data for the B mode.
- the control of the control unit 16 causes the ultrasound probe 1 to start ultrasound three-dimensional scanning according to the Doppler mode scan sequence, and transmit / receive
- the unit 11 collects three-dimensional reflected wave data (step S205).
- the transmitter / receiver 11 generates three-dimensional reflected wave data for Doppler mode.
- the image generation unit 14 generates power volume data (step S206), and the control unit 16 determines whether or not a clip area setting request has been received (step S207). If the clip area setting request is not accepted (No at Step S207), the ultrasound diagnostic apparatus returns to Step 205 and continues to collect the three-dimensional reflected wave data for the Doppler mode.
- the acquisition unit 16a acquires B-mode volume data and power volume data of the same time phase (Step S208). Then, the detection unit 16b detects the clip area using the power volume data (step S209), and sets the clip area in the B-mode volume data (step S210).
- the image generation unit 14 generates image data for display from the B-mode volume data using the clip area (step S211). Then, under the control of the control unit 16, the monitor 2 displays the image data (step S212) and ends the process.
- the clip region of the B-mode volume data of the predetermined time phase is detected using the Doppler volume data of the predetermined time phase collected individually by the optimized scan sequence. it can. Therefore, in the second embodiment, the clip area can be detected with higher accuracy.
- the acquisition unit 16a acquires tissue volume data and fluid volume data by the method described in the first embodiment or the second embodiment.
- the detection unit 16b detects the clip area of the tissue volume data by the method described in the first embodiment.
- the detection part 16b which concerns on 3rd Embodiment performs the following processes using the centerline extracted by the fly-through display mentioned above.
- the detection unit 16b further calculates the area of the lumen region in each of a plurality of cross sections orthogonal to the center line of the lumen region. And the detection part 16b detects a cross section from which the calculated area differs compared with the area calculated in the surrounding cross section as an abnormal cross section.
- FIG. 12 is a diagram for explaining a detection unit according to the third embodiment.
- the detection unit 16b sets a plurality of cross sections orthogonal to the center line 211 of the lumen region 210 extracted by the image generation unit 14, as shown in FIG.
- the detection unit 16b sets a plurality of cross sections along the center line 211 at a constant interval (for example, 1 mm). Note that the interval may be set by the operator or may be initially set.
- the detection unit 16b calculates the area of the portion surrounded by the intersection line between each cross section and the contour (clip region) of the lumen region 210.
- the lumen region 210 is a lumen region of a blood vessel
- the area calculated by the detection unit 16b in each cross section is a cross-sectional area of the inner wall of the blood vessel.
- the cross-sectional area calculated for the cross-section including the stenosis site is abruptly smaller than the cross-sectional area calculated for the surrounding cross-section.
- the cross-sectional area calculated for a cross section including a part having a blood vessel such as an aneurysm is larger than the cross-sectional area calculated for the surrounding cross-section.
- the detection unit 16b detects, for example, a cross section with the smallest area or a cross section with the largest area as an abnormal cross section.
- the detection unit 16b may calculate, for example, an area change amount along the center line 211 and detect a cross section where the change amount reaches a peak as an abnormal cross section.
- the detection unit 16b may use fluid information of the fluid volume data as a detection parameter in order to further increase the detection accuracy.
- the detection unit 16b extracts the velocity extracted within the intersection line of each cross section.
- the stenosis site tends to have a high flow rate because the cross-sectional area of the blood vessel is small. Therefore, for example, the detection unit 16b detects, as an abnormal cross section, a cross section where the flow velocity is maximum among cross sections whose area is smaller than a predetermined threshold.
- the detection unit 16b detects an abnormal cross-section 213 as shown in FIG. 12, for example.
- the abnormal cross section 213 is a cross section that passes through the most narrowed portion of the narrowed portions 212.
- the image generation unit 14 generates image data to be displayed on the monitor 2 from tissue volume data (B-mode volume data) that is volume data to be image-processed, using an abnormal cross section.
- tissue volume data B-mode volume data
- the image generation unit 14 uses the abnormal cross section as a clip surface for performing the rendering process.
- the image generation unit 14 cuts the B-mode volume data 200 at the abnormal section 213 and divides it into two areas, and generates B-mode volume data 201 from which one area is removed.
- a point 214 shown in FIG. 13 is an intersection of the abnormal cross section 213 and the center line 211.
- the image generation unit 14 generates image data using the B mode volume data 201.
- the image generation unit 14 generates MPR image data 215 of the abnormal cross section 213 located on the surface of the B-mode volume data 201.
- the outer wall is depicted together with the inner wall of the blood vessel in the abnormal section 213.
- the image generation unit 14 may generate a VR image or a MIP image using the B-mode volume data 201. Further, the image generation unit 14 may generate a thick MIP image by using the abnormal mode 213 and the B-mode volume data 201 in a region sandwiched by the cross section parallel to the abnormal cross section 213.
- the clip cross section is changed by freely rotating the abnormal cross section 213 which is a clip cross section around the point 214.
- the operator operates the trackball to set a section 216 obtained by rotating the abnormal section 213 as a clip section as shown in FIG.
- the cross section 216 is a cross section orthogonal to the abnormal cross section 213.
- the image generation unit 14 cuts the B-mode volume data 200 along a cross section 216 to divide it into two areas, and generates B-mode volume data 202 from which one area is removed. Then, the image generation unit 14 generates image data using the B mode volume data 202.
- the image generation unit 14 generates MPR image data 217 of a cross section 216 located on the surface of the B-mode volume data 202.
- the outer wall is depicted together with the inner wall of the blood vessel in the cross section 216 substantially along the traveling direction of the blood vessel.
- the image generation unit 14 may generate a VR image or a MIP image using the B-mode volume data 202. Further, the image generation unit 14 may generate a thick MIP image using the B-mode volume data 202 of the area sandwiched by the cross section 216 and the cross section parallel to the cross section 216.
- the start point for performing the fly-through display is automatically set using the point 214 specified from the abnormal section 213 detected by the detection unit 16b.
- the detection unit 16 b sets a point 217 on the center line 211 located in the vicinity of the point 214 as a viewpoint for starting fly-through display.
- the detection unit 16 b sets a point at a position 3 cm away from the point 214 along the center line 211 as the point 217.
- the image generation unit 14 generates a VE image in the line-of-sight direction from the point 217 toward the stenosis site 212. Further, the image generation unit 14 moves the viewpoint from the point 217 toward the point 214 to sequentially generate new VE images. Thereby, the operator can observe mainly the fly-through display centering on the stenosis part 212.
- FIG. Note that the third embodiment may be a case where a plurality of abnormal cross sections are detected.
- FIG. 16 is a flowchart for explaining a processing example of the ultrasonic diagnostic apparatus according to the third embodiment. Note that the flowchart shown in FIG. 16 illustrates a case where an abnormal cross-section that is a clip surface is automatically detected after detection of a clip region. However, the third embodiment may be a case where the operator manually makes a clip surface detection request.
- the ultrasonic diagnostic apparatus determines whether or not a clip region has been detected (step S301).
- the ultrasonic diagnostic apparatus waits until the clip area is detected.
- the detection unit 16b sets a plurality of cross sections orthogonal to the center line (Step S302). Then, the detection unit 16b calculates the area of the clip region in a plurality of cross sections (step S303), and detects a clip surface that becomes an abnormal cross section (step S304).
- the image generation unit 14 generates image data for display from the B-mode volume data using the clip plane (step S305). Then, under the control of the control unit 16, the monitor 2 displays the image data (step S306) and ends the process.
- a portion where a stenosis or an aneurysm is generated can be easily detected as an abnormal cross section by using a clip region.
- various image data is generated using an abnormal cross section as a clip plane, abnormal morphology of a lumen such as a blood vessel can be observed in detail.
- the third embodiment it is possible to improve the diagnostic accuracy in the morphological abnormality diagnosis of the blood vessel using the ultrasonic diagnostic apparatus having non-invasive characteristics and improve the examination efficiency.
- the first to third embodiments the case where B-mode volume data is used as tissue volume data and power volume data or color Doppler data is used as fluid volume data has been described.
- the first to third embodiments may use three-dimensional B-mode data as the tissue volume data and three-dimensional Doppler data as the fluid volume data.
- the detection unit 16b detects the clip area in the three-dimensional B-mode data using the power value of the three-dimensional Doppler data, and further uses the detected clip area to clip the clip area in the B-mode volume data. Is detected.
- image processing methods described in the first to third embodiments may be performed by two modified examples (first modified example and second modified example) described below.
- the tissue volume data used as the volume data to be image-processed is tissue volume data generated by three-dimensionally scanning an area where fluid volume data has been collected using ultrasound.
- the tissue volume data used as the volume data to be processed is different from the ultrasonic diagnostic apparatus in the region where the fluid volume data is collected.
- the present invention can also be applied to tissue volume data generated by three-dimensional imaging by a medical image diagnostic apparatus.
- the acquisition unit 16a generates a tissue volume generated by three-dimensionally imaging a region where fluid volume data is collected by a medical image diagnostic apparatus of a type different from the ultrasonic diagnostic apparatus as tissue volume data. Get the data.
- the detection unit 16b detects the lumen area of the lumen included in the tissue volume data after aligning the fluid volume data and the tissue volume data.
- FIG. 17 is a diagram for explaining the first modification.
- the acquisition unit 16a acquires the X-ray CT volume data 101 as illustrated in FIG.
- the acquisition unit 16a acquires the X-ray CT volume data 101 from an X-ray CT apparatus or a medical image database via an interface (not shown) based on an instruction from the operator.
- X-ray CT volume data 101 is tissue volume data obtained by imaging a region for collecting fluid volume data.
- the X-ray CT volume data 101 is tissue CT volume data designated by the operator for fly-through display of VE images.
- the position sensor 4 is a magnetic sensor, for example, and is attached to the ultrasonic probe 1.
- the transmitter 5 is, for example, a device that is disposed in the vicinity of the ultrasonic probe 1 and that forms a magnetic field toward the outside centering on the device itself.
- the position sensor 4 detects a three-dimensional magnetic field formed by the transmitter 5. Then, the position sensor 4 calculates the position (coordinates and angle) of its own device in the space with the transmitter 5 as the origin based on the detected magnetic field information, and transmits the calculated position to the detection unit 16b. Here, the position sensor 4 transmits the three-dimensional coordinates and angle at which the device itself is located as the three-dimensional position information of the ultrasonic probe 1 to the detection unit 16b. Thereby, the detection unit 16b acquires the three-dimensional position information of the ultrasonic probe 1.
- the operator performs ultrasonic scanning for the B mode in the region including the lumen of the subject P.
- the operator first uses the ultrasonic probe 1 to perform a two-dimensional scan of the subject P on the cross section 300 as shown in FIG.
- the cross section 300 is set, for example, as a cross section located at the center of a region where three-dimensional scanning is performed.
- the control unit 16 controls ultrasonic transmission / reception via the transmission / reception unit 11. From this, the detection part 16b can acquire the relative position with respect to the ultrasonic probe 1 of the cross section 300.
- the detection unit 16b acquires the three-dimensional position information of the ultrasonic probe 1, it can acquire the three-dimensional position information in the real space of the cross section 300.
- the monitor 2 displays two-dimensional B-mode image data 301 generated by two-dimensionally scanning the cross section 300 as shown in FIG. While referring to the B-mode image data 301 displayed on the monitor 2, the operator moves the position sensor 4 so that the lumen of the subject P that is the display target of the VE image is drawn at the approximate center in the image. The attached ultrasonic probe 1 is operated. Further, the operator adjusts the position of the cutting surface for MPR processing via the input device 3 so that the X-ray CT image data depicting the lumen of the subject P is displayed on the monitor 2. As a result, the monitor 2 displays the MPR image data 102 of the X-ray CT volume data 101 as shown in FIG.
- the operator presses the confirmation button.
- the operator designates the center position of the feature portion in each image using the mouse.
- the operator designates the positions of a plurality of feature portions in each image using a mouse.
- the operator performs a three-dimensional scan of the subject P in the Doppler mode in order to collect fluid volume data in the three-dimensional region including the cross section 300 when the confirm button is pressed.
- the image generation unit 14 generates fluid volume data (for example, power volume data).
- the detection unit 16b performs alignment between the fluid volume data and the X-ray CT volume data 101 using various types of information when the confirm button is pressed.
- the various information when the confirm button is pressed corresponds to the three-dimensional position information in the X-ray CT volume data 101 of the cross section corresponding to the MPR image data 102 when the confirm button is pressed, and the B-mode image data 301 when the confirm button is pressed. It is the three-dimensional position information in the real space of the cross section 300.
- the detection unit 16b converts the three-dimensional position information in the real space of the cross section 300 into the three-dimensional position information in the fluid volume data of the cross section 300 based on the ultrasonic transmission / reception conditions, the scan conversion conditions, and the like.
- the various types of information when the confirm button is pressed are the position information of the characteristic parts of the MPR image data 102 and the B-mode image data 301, respectively.
- the detection unit 16 b generates a conversion matrix for converting the coordinate system of the fluid volume data into the coordinate system of the X-ray CT volume data 101 using these various pieces of information.
- the detection unit 16b specifies the alignment between the B-mode volume data collected at the same time phase as the fluid volume data and the tissue volume data of other types 3 You may carry out using two or more characteristic parts. Further, the detection unit 16b performs alignment between the B-mode volume data collected at the same time phase as the fluid volume data and other types of tissue volume data, for example, edge detection processing, feature point detection processing, and the like. May be used. Thereby, the detection unit 16b can perform alignment between the fluid volume data and other types of tissue volume data.
- the detection part 16b detects the fluid area
- the image generation unit 14 performs the processing described with reference to FIG. 6 in the first embodiment from the X-ray CT volume data 101 to generate a VE image for fly-through display.
- the image generation unit 14 may generate various image data described with reference to FIGS. 7A, 7B, and 7C from the X-ray CT volume data 101 in the first embodiment.
- the acquisition unit 16a obtains the biological signal of the subject P. Used to acquire other types of tissue volume data and fluid volume data in the same time phase. Then, the detection unit 16b detects the lumen region after aligning other types of tissue volume data and fluid volume data in the same time phase.
- the detection unit 16b may detect an abnormal cross section from other types of tissue volume data. Also in the first modification, as described in the third embodiment, the image generation unit 14 generates image data to be displayed on the monitor 2 from other types of tissue volume data using the abnormal cross section. Also good.
- the lumen area of the lumen of non-contrast X-ray CT volume data or MRI volume data can be easily detected.
- FIG. 18 is a diagram for explaining the second modification.
- fluid volume data is used as the volume data to be processed.
- the acquisition unit 16a acquires a fluid volume.
- the detection unit 16a detects the fluid region detected by the fluid volume data as a lumen region of the lumen in the fluid volume data.
- the detection unit 16b detects the fluid region 110 of the power volume data 100 as shown in FIG. Then, the detection unit 16b detects the fluid region 110 as the lumen region 111 of the lumen in the power volume data 100 as shown in the left diagram of FIG.
- the power volume data 100 and the lumen region 111 are shown as two-dimensional data, but actually, the power volume data 100 and the lumen region 111 are three-dimensional data.
- the lumen region 111 that is the fluid region 110 to which the luminance value is given is indicated by hatching, and the region where no fluid exists (the region other than the lumen region 111 in the power volume data 100) is white. Is shown.
- the image generation unit 14 generates pseudo volume data from the fluid volume data using the lumen region detected by the detection unit 16b. Specifically, the image generation unit 14 removes the lumen region detected by the detection unit 16b from the fluid volume data. Further, the image generation unit 14 assigns a predetermined luminance value to at least the inner wall of the lumen based on the lumen region detected by the detection unit 16b.
- the image generation unit 14 gives a luminance value “0” to the lumen region 111 and gives a luminance value “1” to a region other than the lumen region 111 in the power volume data 100.
- the image generation unit 14 generates the pseudo volume data 120 in which the lumen region 111 is removed and the luminance value “1” is given to the voxel corresponding to the inner wall of the lumen (the right diagram in FIG. 18). See).
- the pseudo volume data 120 is shown as two-dimensional data, but actually, the pseudo volume data 120 is three-dimensional data. In the right diagram of FIG.
- a region to which the luminance value “1” is given that is, a region where no fluid exists, such as an inner wall of a lumen, is shown in black.
- the region to which the brightness value “0” is given that is, the removed lumen region 111 is shown in white.
- the image generation unit 14 assigns the luminance value “1” only to the inner wall of the lumen and the vicinity of the inner wall in the region other than the lumen region 111 in the power volume data 100, for example, and generates the pseudo volume data 120. It may be generated.
- the image generation unit 14 generates a projection image (VE image) obtained by projecting the pseudo volume data 120 from the viewpoint set inside the lumen as image data to be displayed on the monitor 2. Further, the image generation unit 14 extracts the center line of the lumen from the pseudo volume data 120. Then, the image generation unit 14 generates a plurality of projection images (VE images) whose viewpoints are moved along the center line as image data groups that are displayed as moving images on the monitor 2.
- VE image projection image obtained by projecting the pseudo volume data 120 from the viewpoint set inside the lumen as image data to be displayed on the monitor 2. Further, the image generation unit 14 extracts the center line of the lumen from the pseudo volume data 120. Then, the image generation unit 14 generates a plurality of projection images (VE images) whose viewpoints are moved along the center line as image data groups that are displayed as moving images on the monitor 2.
- the detection unit 16b detects an abnormal cross section from the pseudo volume data 120 generated from the power volume data 100 that is the volume data to be processed. It may be detected.
- the image generation unit 14 may generate image data to be displayed on the monitor 2 from the pseudo volume data 120 using the abnormal cross section. .
- fly-through display can be performed using only Doppler volume data (fluid volume data) that can easily detect the lumen area of the lumen.
- the image processing methods described in the first to third embodiments, the first modification, and the second modification are performed by an image processing apparatus installed independently of the ultrasonic diagnostic apparatus. It may be the case.
- Such an image processing apparatus acquires three-dimensional B-mode data and three-dimensional Doppler data, and B-mode volume data and Doppler volume data, thereby performing the image processing described in the first to third embodiments.
- the method can be performed.
- the image processing apparatus has been described in the first modification by acquiring three-dimensional Doppler data or Doppler volume data, other tissue volume data, and alignment information (for example, a transformation matrix).
- An image processing method can be performed.
- the image processing apparatus can perform the image processing method described in the second modification by acquiring three-dimensional Doppler data or Doppler volume data.
- each component of each illustrated apparatus is functionally conceptual and does not necessarily need to be physically configured as illustrated.
- the specific form of distribution / integration of each device is not limited to the one shown in the figure, and all or a part of the distribution / integration is functionally or physically distributed in arbitrary units according to various loads or usage conditions. Can be integrated and configured.
- all or a part of each processing function performed in each device can be realized by a CPU and a program that is analyzed and executed by the CPU, or can be realized as hardware by wired logic.
- the image processing methods described in the first to third embodiments, the first modification, and the second modification use an image processing program prepared in advance by a computer such as a personal computer or a workstation. It can be realized by executing.
- This image processing program can be distributed via a network such as the Internet.
- the control program is recorded on a computer-readable non-transitory recording medium such as a flash memory such as a hard disk, a flexible disk (FD), a CD-ROM, an MO, a DVD, a USB memory, and an SD card memory. It can also be executed by being read from a non-transitory recording medium by a computer.
- the first modified example, and the second modified example the lumen region of the lumen can be easily detected.
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Medical Informatics (AREA)
- Public Health (AREA)
- Pathology (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Veterinary Medicine (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Radiology & Medical Imaging (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biophysics (AREA)
- Heart & Thoracic Surgery (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Acoustics & Sound (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Computer Graphics (AREA)
- General Engineering & Computer Science (AREA)
- Physiology (AREA)
- Hematology (AREA)
- Vascular Medicine (AREA)
- Cardiology (AREA)
- Data Mining & Analysis (AREA)
- Databases & Information Systems (AREA)
- Epidemiology (AREA)
- Primary Health Care (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
実施形態の超音波診断装置は、取得部(16a)と、検出部(16b)とを備える。取得部(16a)は、超音波により3次元走査された領域内を流動する流体に関する流体情報を示す流体ボリュームデータを取得する。検出部(16b)は、前記流体情報を用いて前記領域内で流体が存在する領域を検出し、当該検出した領域を用いて、画像処理対象のボリュームデータにおける管腔の内腔領域を検出する。
Description
本発明の実施形態は、超音波診断装置、画像処理装置及び画像処理方法に関する。
従来、管腔内を観察可能な表示方法の一例として、管腔状組織を含む3次元医用画像データ(ボリュームデータ)を用いた仮想内視鏡(VE:Virtual Endoscopy)画像のフライスルー(Flythrough)表示が知られている。VE画像は、管腔内に設定された視点及び視線方向を用いた透視投影法により、ボリュームデータから生成される画像である。また、フライスルー表示は、管腔の中心線(芯線)に沿って視点を移動することで、視点位置が異なるVE画像を動画表示する表示方法である。フライスルー表示は、主に、X線CT(Computed Tomography)装置や磁気共鳴イメージング(MRI:Magnetic Resonance Imaging)装置等で取得された大腸等の消化器官を含むボリュームデータに対して行なわれている。
また、近年、超音波の3次元走査が可能な超音波プローブにより、ボリュームデータを略リアルタイムで時系列に沿って生成する超音波診断装置が実用化されている。このため、超音波検査の分野でも、管腔状組織を含むBモードボリュームデータを用いたフライスルー表示の導入が進められている。ただし、超音波診断装置は、その性質上、水分や実質で満たされていない消化器官等の臓器の観察には不向きである。このため、超音波診断装置によるフライスルー表示の適用範囲は、血液で満たされている血管や、胆汁で満たされている胆管等、流体で満たされた管腔となる。
超音波診断装置は、X線CT装置やMRI装置等の他の医用画像診断装置と比較して、微細な構造物の描出能に優れ、血管を中心とした循環器系の観察において有用な医用画像診断装置である。例えば、超音波診断装置を用いた血管のフライスルー表示は、循環器系疾患、特に血管狭窄や血管瘤の新たな観察手法として有用である。ここで、管腔のフライスルー表示を行なう場合、管腔の内壁がレンダリング対象であるクリップ領域となる。
しかし、超音波画像(Bモード画像)は、X線CT画像やMRI画像等の他の医用画像と比較して、構造物間の輪郭がぼやける傾向が強い。このため、管腔の太さがある程度以上でなければ、プログラムを用いた自動処理によりBモードボリュームデータから管腔の内腔領域を検出することが困難であった。このため、現在、超音波診断装置におけるフライスルー表示は、ある程度の太さを持つ管状組織に限られており、細い管状組織に適用することが困難であった。
本発明が解決しようとする課題は、管腔の内腔領域を容易に検出することができる超音波診断装置、画像処理装置及び画像処理方法を提供することである。
実施形態の超音波診断装置は、取得部と、検出部とを備える。取得部は、超音波により3次元走査された領域内を流動する流体に関する流体情報を示す流体ボリュームデータを取得する。検出部は、前記流体情報を用いて前記領域内で流体が存在する領域を検出し、当該検出した領域を用いて、画像処理対象のボリュームデータにおける管腔の内腔領域を検出する。
以下、添付図面を参照して、超音波診断装置の実施形態を詳細に説明する。
(第1の実施形態)
まず、第1の実施形態に係る超音波診断装置の構成について説明する。図1は、第1の実施形態に係る超音波診断装置の構成例を示すブロック図である。図1に例示するように、本実施形態に係る超音波診断装置は、超音波プローブ1と、モニタ2と、入力装置3と、装置本体10とを有する。
まず、第1の実施形態に係る超音波診断装置の構成について説明する。図1は、第1の実施形態に係る超音波診断装置の構成例を示すブロック図である。図1に例示するように、本実施形態に係る超音波診断装置は、超音波プローブ1と、モニタ2と、入力装置3と、装置本体10とを有する。
超音波プローブ1は、複数の圧電振動子を有し、これら複数の圧電振動子は、後述する装置本体10が有する送受信部11から供給される駆動信号に基づき超音波を発生する。また、超音波プローブ1は、被検体Pからの反射波を受信して電気信号に変換する。また、超音波プローブ1は、圧電振動子に設けられる整合層と、圧電振動子から後方への超音波の伝播を防止するバッキング材等を有する。なお、超音波プローブ1は、装置本体10と着脱自在に接続される。
超音波プローブ1から被検体Pに超音波が送信されると、送信された超音波は、被検体Pの体内組織における音響インピーダンスの不連続面で次々と反射され、反射波信号として超音波プローブ1が有する複数の圧電振動子にて受信される。受信される反射波信号の振幅は、超音波が反射される不連続面における音響インピーダンスの差に依存する。なお、送信された超音波パルスが、移動している血流や心臓壁等の表面で反射された場合の反射波信号は、ドプラ効果により、移動体の超音波送信方向に対する速度成分に依存して、周波数偏移を受ける。
ここで、第1の実施形態に係る超音波プローブ1は、超音波により被検体Pを2次元で走査するとともに、被検体Pを3次元で走査することが可能な超音波プローブである。具体的には、第1の実施形態に係る超音波プローブ1は、一列に配置された複数の圧電振動子により、被検体Pを2次元で走査するとともに、複数の圧電振動子を所定の角度(揺動角度)で揺動させることで、被検体Pを3次元で走査するメカニカル4Dプローブである。或いは、第1の実施形態に係る超音波プローブ1は、複数の圧電振動子がマトリックス状に配置されることで、被検体Pを3次元で超音波走査することが可能な2Dプローブである。なお、2Dプローブは、超音波を集束して送信することで、被検体Pを2次元で走査することも可能である。
入力装置3は、マウス、キーボード、ボタン、パネルスイッチ、タッチコマンドスクリーン、フットスイッチ、トラックボール、ジョイスティック等を有し、超音波診断装置の操作者からの各種設定要求を受け付け、装置本体10に対して受け付けた各種設定要求を転送する。
モニタ2は、超音波診断装置の操作者が入力装置3を用いて各種設定要求を入力するためのGUI(Graphical User Interface)を表示したり、装置本体10において生成された超音波画像等を表示したりする。
装置本体10は、超音波プローブ1が受信した反射波信号に基づいて超音波画像データを生成する装置である。具体的には、第1の実施形態に係る装置本体10は、超音波プローブ1が受信した3次元の反射波データに基づいて3次元の超音波画像データを生成可能な装置である。以下、3次元の超音波画像データを「ボリュームデータ」と記載する。
装置本体10は、図1に示すように、送受信部11と、Bモード処理部12と、ドプラ処理部13と、画像生成部14と、画像メモリ15と、制御部16と、内部記憶部17とを有する。
送受信部11は、パルス発生器、送信遅延部、パルサ等を有し、超音波プローブ1に駆動信号を供給する。パルス発生器は、所定のレート周波数で、送信超音波を形成するためのレートパルスを繰り返し発生する。また、送信遅延部は、超音波プローブ1から発生される超音波をビーム状に集束し、かつ送信指向性を決定するために必要な圧電振動子ごとの遅延時間を、パルス発生器が発生する各レートパルスに対し与える。また、パルサは、レートパルスに基づくタイミングで、超音波プローブ1に駆動信号(駆動パルス)を印加する。すなわち、送信遅延部は、各レートパルスに対し与える遅延時間を変化させることで、圧電振動子面から送信される超音波の送信方向を任意に調整する。
なお、送受信部11は、後述する制御部16の指示に基づいて、所定のスキャンシーケンスを実行するために、送信周波数、送信駆動電圧等を瞬時に変更可能な機能を有している。特に、送信駆動電圧の変更は、瞬間にその値を切り替え可能なリニアアンプ型の発信回路、又は、複数の電源ユニットを電気的に切り替える機構によって実現される。
また、送受信部11は、プリアンプ、A/D(Analog/Digital)変換器、受信遅延部、加算器等を有し、超音波プローブ1が受信した反射波信号に対して各種処理を行って反射波データを生成する。プリアンプは、反射波信号をチャネル毎に増幅する。A/D変換器は、増幅された反射波信号をA/D変換する。受信遅延部は、受信指向性を決定するために必要な遅延時間を与える。加算器は、受信遅延部によって処理された反射波信号の加算処理を行なって反射波データを生成する。加算器の加算処理により、反射波信号の受信指向性に応じた方向からの反射成分が強調され、受信指向性と送信指向性とにより超音波送受信の総合的なビームが形成される。
第1の実施形態に係る送受信部11は、被検体Pを3次元走査するために、超音波プローブ1から3次元の超音波ビームを送信させる。そして、第1の実施形態に係る送受信部11は、超音波プローブ1が受信した3次元の反射波信号から3次元の反射波データを生成する。
なお、送受信部11からの出力信号の形態は、RF(Radio Frequency)信号と呼ばれる位相情報が含まれる信号である場合や、包絡線検波処理後の振幅情報である場合等、種々の形態が選択可能である。
Bモード処理部12は、送受信部11から反射波データを受信し、対数増幅、包絡線検波処理等を行なって、信号強度が輝度の明るさで表現されるデータ(Bモードデータ)を生成する。
ドプラ処理部13は、送受信部11から受信した反射波データから速度情報を周波数解析し、ドプラ効果による血流や組織、造影剤エコー成分を抽出し、速度、分散、パワー等の移動体情報を多点について抽出したデータ(ドプラデータ)を生成する。本実施形態の移動体は、管腔内を流動する血液等の流体である。
なお、第1の実施形態に係るBモード処理部12及びドプラ処理部13は、2次元の反射波データ及び3次元の反射波データの両方について処理可能である。すなわち、Bモード処理部12は、2次元の反射波データから2次元のBモードデータを生成し、3次元の反射波データから3次元のBモードデータを生成する。また、ドプラ処理部13は、2次元の反射波データから2次元のドプラデータを生成し、3次元の反射波データから3次元のドプラデータを生成する。3次元のBモードデータは、3次元走査範囲の各走査線上で設定された複数の点それぞれに位置する反射源の反射強度に応じた輝度値が割り当てられたデータとなる。また、3次元のドプラデータは、3次元走査範囲の各走査線上で設定された複数の点それぞれに、血流情報(速度、分散、パワー)の値に応じた輝度値が割り当てられたデータとなる。
画像生成部14は、Bモード処理部12及びドプラ処理部13が生成したデータから超音波画像データを生成する。すなわち、画像生成部14は、Bモード処理部12が生成した2次元のBモードデータから反射波の強度を輝度にて表したBモード画像データを生成する。Bモード画像データは、超音波走査された領域内の組織形状が描出されたデータとなる。また、画像生成部14は、ドプラ処理部13が生成した2次元のドプラデータから移動体情報を表すドプラ画像データを生成する。ドプラ画像データは、速度画像、分散画像、パワー画像、又は、これらの組み合わせた画像である。ドプラ画像データは、超音波走査された領域内を流動する流体に関する流体情報を示すデータとなる。
ここで、画像生成部14は、一般的には、超音波走査の走査線信号列を、テレビ等に代表されるビデオフォーマットの走査線信号列に変換(スキャンコンバート)し、表示用の超音波画像データを生成する。具体的には、画像生成部14は、超音波プローブ1による超音波の走査形態に応じて座標変換を行なうことで、表示用の超音波画像データを生成する。また、画像生成部14は、スキャンコンバート以外に種々の画像処理として、例えば、スキャンコンバート後の複数の画像フレームを用いて、輝度の平均値画像を再生成する画像処理(平滑化処理)や、画像内で微分フィルタを用いる画像処理(エッジ強調処理)等を行なう。また、画像生成部14は、超音波画像データに、種々のパラメータの文字情報、目盛り、ボディーマーク等を合成する。
すなわち、Bモードデータ及びドプラデータは、スキャンコンバート処理前の超音波画像データであり、画像生成部14が生成するデータは、スキャンコンバート処理後の表示用の超音波画像データである。なお、Bモードデータ及びドプラデータは、生データ(Raw Data)とも呼ばれる。また、3次元Bモードデータ及び3次元Bモードデータは、ボリュームデータとも呼ばれる。
更に、画像生成部14は、Bモード処理部12が生成した3次元のBモードデータに対して座標変換を行なうことで、3次元のBモード画像データを生成する。また、画像生成部14は、ドプラ処理部13が生成した3次元のドプラデータに対して座標変換を行なうことで、3次元のドプラ画像データを生成する。すなわち、画像生成部14は、「3次元のBモード画像データや3次元のドプラ画像データ」を「3次元の超音波画像データであるボリュームデータ」として生成する。以下では、3次元のBモード画像データをBモードボリュームデータと記載し、3次元のドプラ画像データをドプラボリュームデータと記載する。Bモードボリュームデータは、超音波により3次元走査された領域内の組織形状を示す組織ボリュームデータとなる。また、ドプラボリュームデータは、超音波により3次元走査された領域内を流動する流体に関する流体情報を示す流体ボリュームデータとなる。
更に、画像生成部14は、ボリュームデータをモニタ2にて表示するための各種の2次元画像データを生成するために、ボリュームデータに対してレンダリング処理を行なう。画像生成部14が行なうレンダリング処理としては、断面再構成法(MPR:Multi Planer Reconstruction)を行なってボリュームデータからMPR画像データを生成する処理がある。また、画像生成部14が行なうレンダリング処理としては、ボリュームデータに対して「Curved MPR」を行なう処理や、ボリュームデータに対して「Maximum Intensity Projection」を行なう処理がある。
また、画像生成部14が行なうレンダリング処理としては、3次元の情報を反映した2次元画像データを生成するボリュームレンダリング(VR:Volume Rendering)処理がある。例えば、画像生成部14は、ボリュームレンダリング処理として、透視投影(Perspective Projection)法を行なうことで、フライスルー表示用の仮想内視鏡(VE)画像を生成することができる。
ここで、ドプラデータを用いた画像の表示方法について説明する。ドプラデータを用いた画像の表示方法は、一般的には、カラードプラ法(CDI:Color Doppler Imaging)とパワードプラ法(PDI:Power Doppler Imaging)とに大別される。カラードプラ法では、画像生成部14は、血流の方向及び血流の速度の大きさに応じて色相を変化させたカラードプラ画像データを生成する。例えば、画像生成部14は、超音波プローブ1に向かってくる方向の血流を、血流の速度の大きさに応じて赤系色(赤から黄)の色相を割り当て、超音波プローブ1から遠ざかる方向の血流を、血流の速度の大きさに応じて青系色(青から青緑)の色相を割り当てたカラードプラ画像データを生成する。なお、カラードプラ法では、画像生成部14は、速度情報に分散情報を組み合わせた速度―分散表示を行なうためのカラードプラ画像データを生成する場合もある。
また、パワードプラ法では、画像生成部14は、ドプラ信号の強度であるパワーの値に応じて、例えば、赤色系の色相や明度、或いは、彩度を変化させたパワー画像データを生成する。
3次元走査でカラードプラ法を行なう場合、画像生成部14は、3次元ドプラデータからドプラボリュームデータとして、カラードプラボリュームデータを生成する。また、3次元走査でパワードプラ法を行なう場合、画像生成部14は、3次元ドプラデータからドプラボリュームデータとして、ドプラ信号の強度であるパワーの値を3次元空間上にマッピングしたパワーボリュームデータを生成する。また、3次元走査が時系列に沿って繰り返し行なわれる場合、画像生成部14は、カラードプラボリュームデータやパワーボリュームデータを時系列に沿って順次生成する。
なお、カラードプラ法では、血流が存在する範囲の検出精度が、血流方向と超音波プローブ1との相対位置に依存する。具体的には、カラードプラ法では、超音波ビームの方向と直交する方向の血流の検出精度が低下する。一方、パワードプラ法では、血流の方向や速度に関する情報を検出できないが、血流が存在する範囲を、血流方向と超音波プローブ1との相対位置に依存することなく、検出することができる。
また、ドプラ画像データは、通常、Bモード画像データに重畳されて、モニタ2に出力される。送受信部11は、2次元走査や3次元走査において、1本の走査線で1回超音波ビームの送受信を行なうBモード用のスキャンと、1本の走査線で複数回超音波ビームの送受信を行なうドプラモード用のスキャンとを並行して行なう。ドプラ処理部13は、同一走査線の複数の反射波データに対して、MTIフィルタ処理、自己相関演算処理、速度・分散・パワー推定処理を行なうことで、ドプラデータを生成する。
図1に示す画像メモリ15は、画像生成部14が生成した表示用の画像データを記憶するメモリである。また、画像メモリ15は、Bモード処理部12やドプラ処理部13が生成したデータを記憶することも可能である。画像メモリ15が記憶するBモードデータやドプラデータは、例えば、診断の後に操作者が呼び出すことが可能となっており、画像生成部14を経由して表示用の超音波画像データとなる。
内部記憶部17は、超音波送受信、画像処理及び表示処理を行なうための制御プログラムや、診断情報(例えば、患者ID、医師の所見等)や、診断プロトコルや各種ボディーマーク等の各種データを記憶する。また、内部記憶部17は、必要に応じて、画像メモリ15が記憶する画像データの保管等にも使用される。また、内部記憶部17が記憶するデータは、図示しないインターフェースを経由して、外部の装置へ転送することができる。
制御部16は、超音波診断装置の処理全体を制御する。具体的には、制御部16は、入力装置3を介して操作者から入力された各種設定要求や、内部記憶部17から読込んだ各種制御プログラム及び各種データに基づき、送受信部11、Bモード処理部12、ドプラ処理部13、画像生成部14の処理を制御する。また、制御部16は、画像メモリ15や内部記憶部17が記憶する表示用の超音波画像データをモニタ2にて表示するように制御する。なお、図1に示すように、第1の実施形態に係る制御部16は、取得部16a及び検出部16bを有する。取得部16a及び検出部16bについては、後に詳述する。
以上、第1の実施形態に係る超音波診断装置の全体構成について説明した。かかる構成のもと、第1の実施形態に係る超音波診断装置は、流体で満たされた管腔を含む領域の3次元走査を行なってBモードボリュームデータを生成する。流体で満たされた管腔としては、血管や、胆管、リンパ腺等がある。そして、第1の実施形態に係る超音波診断装置は、Bモードボリュームデータを用いて、管腔の内壁を観察するための各種画像データを生成する。例えば、第1の実施形態に係る超音波診断装置は、管腔の中心線(芯線)に沿って、管腔の中心線(芯線)に沿って視点を移動して視点位置が異なるVE画像を順次生成表示することで、管腔のフライスルー表示を行なう。フライスルー表示を行なうことで、操作者は、被検体Pに内視鏡を挿入したり、血管内超音波検査(IVUS:intravascular ultrasound)において振動子カテーテルを被検体Pの血管に挿入したりすることなく、管腔を内側から観察することができる。ここで、管腔のフライスルー表示を行なう場合、管腔の内壁が、レンダリング対象であるクリップ領域となる。
しかし、Bモードの画像は、X線CT画像やMRI画像等の他の医用画像と比較して、構造物間の輪郭がぼやける傾向が強い。このため、管腔の太さがある程度以上でなければ、プログラムを用いた自動処理によりBモードボリュームデータから管腔の内腔領域を検出することが困難であった。特に、拍動による動きが激しい血管の場合、血管の輪郭は、更に、ぼやけることが多い。このため、現状では、管腔の太さがある程度以上でなければ、クリップ領域を検出できなかった。このようなことから、従来の超音波診断装置におけるフライスルー表示は、ある程度の太さを持つ管状組織に限られており、細い管状組織に適用することが困難であった。
そこで、第1の実施形態に係る超音波診断装置は、管腔の内腔領域を容易に検出するために、以下に説明する取得部16a及び検出部16bの処理が行なわれる。
取得部16aは、超音波により3次元走査された領域内を流動する流体に関する流体情報を示す流体ボリュームデータを取得する。そして、検出部16bは、流体情報を用いて領域内で流体が存在する領域を検出し、当該検出した領域を用いて、画像処理対象のボリュームデータにおける管腔の内腔領域を検出する。第1の実施形態では、取得部16aは、更に、画像処理対象のボリュームデータとして、領域内の組織形状を示す組織ボリュームデータを取得する。具体的には、第1の実施形態では、取得部16aは、組織ボリュームデータとして、上記の領域を超音波により3次元走査して生成された組織ボリュームデータを取得する。すなわち、第1の実施形態に係る取得部16aは、超音波により3次元走査された領域内の組織形状を示す組織ボリュームデータと、超音波により3次元走査された当該領域内を流動する流体に関する流体情報を示す流体ボリュームデータとを取得する。そして、第1の実施形態に係る検出部16bは、流体ボリュームデータの流体情報を用いて領域内で流体が存在する領域を検出する。そして、検出部16bは、検出した領域を用いて、組織ボリュームデータに含まれる管腔の内腔領域を検出する。
すなわち、第1の実施形態では、管腔の内壁を観察するために、Bモード用のスキャンとともに、ドプラモード用のスキャンも行なう。具体的には、第1の実施形態では、同一の領域に対して、Bモード用のスキャンとドプラモード用のスキャンとを行なう。より具体的には、第1の実施形態では、操作者は、観察対象となる管腔を含む領域の3次元走査が可能な位置に超音波プローブ1を被検体Pに当接する。そして、操作者は、Bモード用の3次元走査とドプラモード用の3次元走査とを並行して行なう指示を行なう。これにより、送受信部11は、Bモード用の3次元の反射波データ及びドプラモード用の3次元の反射波データを生成する。Bモード処理部12は、Bモード用の3次元の反射波データから、3次元Bモードデータを生成し、ドプラ処理部13は、ドプラモード用の3次元の反射波データから3次元ドプラデータを生成する。そして、画像生成部14は、3次元BモードデータからBモードボリュームデータを生成し、3次元ドプラデータからドプラボリュームデータを生成する。
ここで、上述したように、血流等の流体が存在する範囲の検出精度は、CDIよりPDIの方が高い。このため、操作者は、ドプラボリュームデータとして、パワーボリュームデータを収集するように指示する。すなわち、画像生成部14は、パワーボリュームデータを生成する。なお、第1の実施形態は、例えば、管腔の走行方向により、血流が存在する範囲の検出精度が低下しないと判断されるならば、カラードプラボリュームデータを収集する場合であっても良い。
第1の実施形態では、3次元走査を1回行なって、同一時相のBモードボリュームデータ及びパワーボリュームデータを1つずつ生成する。取得部16aは、画像メモリ15に格納された同一時相のBモードボリュームデータ及びパワーボリュームデータを取得し、検出部16bに送信する。
なお、第1の実施形態では、3次元走査を複数回行なって、Bモードボリュームデータ及びパワーボリュームデータを時系列に沿って複数生成する場合であっても良い。かかる場合、例えば、操作者は、収集された複数のBモードボリュームデータそれぞれのMPR画像を参照して、観察に適したBモードボリュームデータを指定する。取得部16aは、操作者が指定したBモードボリュームデータと、当該Bモードボリュームデータと同時に収集されたパワーボリュームデータとを取得し、検出部16bに送信する。
そして、検出部16bは、上述したように、流体ボリュームデータの流体情報を用いて領域内で流体が存在する領域を検出し、当該検出した領域を用いて、組織ボリュームデータに含まれる管腔の内腔領域を検出する。第1の実施形態では、検出部16bは、パワーボリュームデータにおいて、パワーが検出されたことで、輝度値が割り当てられたボクセルの位置情報を用いて流体が存在する領域を検出する。
すなわち、パワーボリュームデータは、流体が存在する位置に対応するボクセルに、流体情報の1つであるパワー値に応じた色を描出するための値が付与されたデータである。検出部16bは、パワーボリュームデータから流体が存在する領域を検出することができる。また、Bモードボリュームデータとパワーボリュームデータとは、同一の座標系を用いて生成されている。すなわち、パワーボリュームデータから検出される「流体が存在する領域の座標」は、Bモードボリュームデータにおいて「流体が存在する領域の座標」となる。ここで、流体が存在する領域は、管腔の内腔を流動する流体が存在する領域であり、Bモードボリュームデータに含まれる管腔の内腔領域となる。以下、図2~図5を用いて、検出部16bの処理について説明する。図2~5は、第1の実施形態に係る検出部を説明するための図である。
検出部16bは、図2に例示するパワーボリュームデータ100内で「流体が存在する領域」である流体領域110を検出する。具体的には、検出部16bは、流体領域110の輪郭を形成するボクセルの座標を検出する。以下、検出部16bが行なう処理の具体例について、図3及び図4を用いて説明する。
図3に例示する処理では、検出部16bは、レンダリングの手法の1つであるサーフィスレンダリングを用いて流体領域110の表面の座標を検出する。サーフィスレンダリングとは、視点方向からボリュームデータを見た場合に、最初にボリュームに視線が当たったボクセルのみを投影するレンダリング手法である。すなわち、複数の視点からサーフィスレンダリングを行なうことで、ボリューム内に存在する物体の表面の位置を取得することができる。
検出部16bは、パワーボリュームデータ100に対して、複数の視点を設定し、各視点からパワーボリュームデータ100の中心や重心に向かう方向の視線方向を設定する。そして、検出部16bは、図3に示すように、複数の視点それぞれでサーフィスレンダリングを行なった結果から、流体領域110の表面の座標を検出する。なお、パワーボリュームデータ100に対するサーフィスレンダリング処理は、検出部16bが行なっても良いし、検出部16bの制御により画像生成部14が行なっても良い。
また、図4に例示する処理では、検出部16bは、レンダリングの手法の1つであるMPRを用いて流体領域110の表面の座標を検出する。すなわち、検出部16bは、パワーボリュームデータ100に対して、平行する複数断面を設定する。設定された複数断面により、パワーボリュームデータ100から再構成された複数のMPR画像それぞれには、図4に例示するように、流体領域110の輪郭が描出される。検出部16bは、各MPR画像の流体領域110の輪郭を検出し、MPR画像ごとに検出した輪郭を結合することで、流体領域110の表面の座標を検出する。なお、パワーボリュームデータ100に対するMPR処理は、検出部16bが行なっても良いし、検出部16bの制御により画像生成部14が行なっても良い。
また、流体領域110の検出処理は、図3や図4で説明した方法以外にも、例えば、領域拡張法等、様々な方法を用いることができる。
そして、検出部16bは、図5に例示するように、検出した流体領域110の表面(輪郭)の座標を、取得部16aから受信したBモードボリュームデータ200における内腔領域210の表面(輪郭)の座標として検出する。内腔領域210の表面は、内腔領域210の内壁となる。検出部16bは、内腔領域210の表面をクリップ領域として設定する。なお、検出部16bは、ノイズ低減等を目的として、検出した流体領域110の表面や、内腔領域210の表面に対して平滑化フィルタ処理等の後処理を行なっても良い。
そして、画像生成部14は、検出部16bが検出した内腔領域の表面を処理対象として、組織ボリュームデータ(Bモードボリュームデータ)からモニタ2に表示する画像データを生成する。図6、図7A、図7B及び図7Cは、第1の実施形態に係る画像生成部を説明するための図である。
画像生成部14は、検出部16bが検出した内腔領域に基づいて、管腔の内部に設定した視点から組織ボリュームデータを投影した投影像を、モニタ2に表示する画像データとして生成する。具体的には、画像生成部14は、組織ボリュームデータから内腔領域を除去したデータから管腔の中心線を抽出し、当該中心線に沿って視点を移動させた複数の投影像を、モニタ2に動画表示する画像データ群として生成する。例えば、画像生成部14は、図6に示すように、内腔領域210の中心線211を抽出する。そして、画像生成部14は、図6に示すように、中心線211に沿って設定された視点を用いて、クリップ領域(内腔領域210の輪郭)からVE画像を生成する。画像生成部14は、中心線211に沿って視点を移動することで、フライスルー表示用のVE画像を順次生成する。
或いは、例えば、画像生成部14は、図7Aに示すように、中心線211に直交する断面により、内腔領域210を切断したMPR画像データAを生成する。或いは、例えば、画像生成部14は、図7Bに示すように、中心線211全てを含む断面(曲面)により、内腔領域210を切断したCurved MPR画像データBを生成する。
或いは、例えば、画像生成部14は、図7Cに示すように、中心線211全てを含む断面と内腔領域210の輪郭とが交わる曲線Cにより、内腔領域210を切り開いた展開画像データDを生成する。図7A、図7B及び図7Cに例示する画像データをモニタ2で参照することでも、操作者は、内腔領域210の内壁の形状を観察することができる。
次に、図8を用いて、第1の実施形態に係る超音波診断装置の処理について説明する。図8は、第1の実施形態に係る超音波診断装置の処理例を説明するためのフローチャートである。
図8に示すように、第1の実施形態に係る超音波診断装置は、3次元の走査開始要求を受け付けたか否かを判定する(ステップS101)。ここで、3次元の走査開始要求を受け付けない場合(ステップS101否定)、超音波診断装置は、3次元の走査開始要求を受け付けるまで待機する。
一方、3次元の走査開始要求を受け付けた場合(ステップS101肯定)、制御部16の制御により、超音波プローブ1は、超音波の3次元走査を行ない、送受信部11は、3次元の反射波データを収集する(ステップS102)。なお、超音波プローブ1は、Bモード用の3次元走査と、ドプラモード用の3次元走査とを並行して行なう。また、送受信部11は、Bモード用の3次元反射波データと、ドプラモード用の3次元反射波データとを生成する。
そして、画像生成部14は、Bモードボリュームデータ及びパワーボリュームデータを生成する(ステップS103)。そして、取得部16aは、Bモードボリュームデータ及びパワーボリュームデータを取得し(ステップS104)、検出部16bに転送する。
そして、検出部16bは、パワーボリュームデータを用いて、管腔の内腔領域の表面であるクリップ領域を検出し(ステップS105)、Bモードボリュームデータにクリップ領域を設定する(ステップS106)。
そして、画像生成部14は、クリップ領域を用いて、Bモードボリュームデータから表示用の画像データを生成する(ステップS107)。そして、制御部16の制御により、モニタ2は、画像データを表示し(ステップS108)、処理を終了する。
上述したように、第1の実施形態では、管腔内壁の観察を行なうために必要となるBモードボリュームデータのクリップ領域の検出処理を、Bモードのボリュームデータと同一領域のドプラボリュームデータを用いて行なう。すなわち、第1の実施形態では、ドプラモードにより流体を検出できる箇所であれば、管腔の太さに依存することなく、クリップ領域を高精度に検出することができる。従って、第1の実施形態では、管腔の内腔領域を容易に検出することができる。
また、第1の実施形態では、管腔の太さに依存することなく、クリップ領域を高精度に検出することができるので、例えば、フライスルー表示等を利用した血管狭窄探索の適用範囲を拡げることができる。また、クリップ領域を検出するために、造影剤を用いる手法もあるが、第1の実施形態では、造影剤を用いることなく、クリップ領域を高精度に検出できるので、被検体Pに対する負担を軽減することができる。
(第2の実施形態)
第2の実施形態では、組織ボリュームデータと流体ボリュームデータとが異なる時期に個別に連続収集される場合について、図9及び図10を用いて説明する。図9は、第2の実施形態に係る超音波診断装置の構成例を示すブロック図であり、図10は、第2の実施形態に係る取得部及び検出部を説明するための図である。
第2の実施形態では、組織ボリュームデータと流体ボリュームデータとが異なる時期に個別に連続収集される場合について、図9及び図10を用いて説明する。図9は、第2の実施形態に係る超音波診断装置の構成例を示すブロック図であり、図10は、第2の実施形態に係る取得部及び検出部を説明するための図である。
ここで、ドプラモードのデータ収集は、Bモードのデータ収集と比較して、計算量が多くなる。このため、ドプラモードの画像データの時間分解能や空間分解能を向上するためには、超音波プローブ1の位置を固定したままで、Bモードのデータ収集と、ドプラモードのデータ収集とを個別に行なうことが望ましい。しかし、異なる時期に収集されたドプラボリュームデータを用いてBモードボリュームデータのクリップ領域を検出するには、検出対象となる2つのボリュームデータが同一時相で収集されたデータであることが必要である。
このため、図9に例示するように、第2の実施形態に係る超音波診断装置は、図1に示す第1の実施形態に係る超音波診断装置と同様の構成を有する装置本体10に、心電計4が接続される点が異なる。心電計4は、データが収集される被検体P(3次元走査される被検体P)の生体信号として、被検体Pの心電波形(ECG: Electrocardiogram)を取得する。心電計4は、取得した心電波形を装置本体10に送信する。
第2の実施形態に係る取得部16aは、組織ボリュームデータと流体ボリュームデータとが異なる時期に個別に連続収集された場合、データが収集された被検体P(3次元走査された被検体P)の生体信号を用いて、同一時相の組織ボリュームデータと流体ボリュームデータとを取得する。そして、検出部16bは、同一心位相の組織ボリュームデータと流体ボリュームデータとを用いて、第1の実施形態で説明した処理により、内腔領域の検出を行なう。
以下、第2の実施形態で行なわれる処理の一例について説明する。第2の実施形態では、超音波プローブ1は、組織ボリュームデータであるBモードボリュームデータを時系列に沿って複数ボリューム収集するために、Bモード用の3次元走査を行なう。そして、第2の実施形態では、超音波プローブ1は、流体ボリュームデータであるパワーボリュームデータを時系列に沿って複数ボリューム収集するために、ドプラモード用の3次元走査を行なう。なお、送受信部11は、最適な時間分解能及び空間分解能となるスキャンシーケンスにより、ドプラモード用の3次元走査を超音波プローブ1に実行させる。
そして、画像生成部14は、ボリュームデータと当該ボリュームデータを生成するために行なわれた超音波走査の時間とを、心電計4から送信された心電波形に対応付けて画像メモリ15に格納する。取得部16aは、画像メモリ15に格納されたデータを参照することで、ボリュームデータを生成するために行なわれた超音波走査時の心時相を取得することができる。
取得部16aは、画像メモリ15から、同一の心時相のBモードボリュームデータとパワーボリュームデータとを取得する。図10に示す一例では、取得部16aは、R波のBモードボリュームデータとパワーボリュームデータとを取得する。なお、取得部16aが取得対象とする時相は、操作者により行なわれる場合であっても、初期設定されている場合であっても良い。
そして、検出部16bは、図10に示すように、R波のパワーボリュームデータからクリップ領域(内腔領域の表面)を検出し、検出したクリップ領域をR波のBモードボリュームデータに設定する。そして、画像生成部14は、R波のBモードボリュームデータに設定されたクリップ領域を用いて表示用の画像データを生成する。
なお、第2の実施形態は、ドプラモード用の3次元走査を行なった後に、Bモード用の3次元走査を行なっても良い。また、第2の実施形態でも、第1の実施形態と同様に、流体ボリュームデータとしてカラードプラボリュームデータを収集しても良い。
また、第2の実施形態は、複数の時相(例えば、R波、P波)を対象として、同一心位相の組織ボリュームデータと流体ボリュームデータとを取得して、各時相でクリップ領域を検出する場合であっても良い。また、第2の実施形態は、時相を判別するための生体信号として、ECGの他に、PCG(phonocardiogram)波形や呼吸信号が用いられる場合であっても良い。
次に、図11を用いて、第2の実施形態に係る超音波診断装置の処理について説明する。図11は、第2の実施形態に係る超音波診断装置処理例を説明するためのフローチャートである。
図11に示すように、第2の実施形態に係る超音波診断装置は、Bモードの走査開始要求を受け付けたか否かを判定する(ステップS201)。ここで、Bモードの走査開始要求を受け付けない場合(ステップS201否定)、超音波診断装置は、Bモードの走査開始要求を受け付けるまで待機する。
一方、Bモードの走査開始要求を受け付けた場合(ステップS201肯定)、制御部16の制御により、超音波プローブ1は、Bモード用のスキャンシーケンスにより、超音波の3次元走査を開始し、制御部16は、心電波形の収集を開始する。そして、送受信部11は、3次元の反射波データを収集する(ステップS202)。なお、送受信部11は、Bモード用の3次元反射波データを生成する。
そして、画像生成部14は、Bモードボリュームデータを生成し(ステップS203)、制御部16は、ドプラモードの走査開始要求を受け付けたか否かを判定する(ステップS204)。ここで、ドプラモードの走査開始要求を受け付けない場合(ステップS204否定)、超音波診断装置は、ステップ202に戻って、Bモード用の3次元反射波データの収集を継続する。
一方、ドプラモードの走査開始要求を受け付けた場合(ステップS204肯定)、制御部16の制御により、超音波プローブ1は、ドプラモード用のスキャンシーケンスにより、超音波の3次元走査を開始し、送受信部11は、3次元の反射波データを収集する(ステップS205)。なお、送受信部11は、ドプラモード用の3次元反射波データを生成する。
そして、画像生成部14は、パワーボリュームデータを生成し(ステップS206)、制御部16は、クリップ領域の設定要求を受け付けたか否かを判定する(ステップS207)。ここで、クリップ領域の設定要求を受け付けない場合(ステップS207否定)、超音波診断装置は、ステップ205に戻って、ドプラモード用の3次元反射波データの収集を継続する。
一方、クリップ領域の設定要求を受け付けた場合(ステップS207肯定)、取得部16aは、同一時相のBモードボリュームデータ及びパワーボリュームデータを取得する(ステップS208)。そして、検出部16bは、パワーボリュームデータを用いて、クリップ領域を検出し(ステップS209)、Bモードボリュームデータにクリップ領域を設定する(ステップS210)。
そして、画像生成部14は、クリップ領域を用いて、Bモードボリュームデータから表示用の画像データを生成する(ステップS211)。そして、制御部16の制御により、モニタ2は、画像データを表示し(ステップS212)、処理を終了する。
上述したように、第2の実施形態では、所定時相のBモードボリュームデータのクリップ領域を、最適化したスキャンシーケンスにより個別に収集された所定時相のドプラボリュームデータを用いて検出することができる。従って、第2の実施形態では、クリップ領域を更に高精度に検出することができる。
(第3の実施形態)
第3の実施形態では、第1の実施形態又は第2の実施形態で検出したクリップ領域を用いて、管腔の形状解析をより詳細に行なう場合について説明する。
第3の実施形態では、第1の実施形態又は第2の実施形態で検出したクリップ領域を用いて、管腔の形状解析をより詳細に行なう場合について説明する。
第3の実施形態では、取得部16aは、第1の実施形態又は第2の実施形態で説明した方法により、組織ボリュームデータ及び流体ボリュームデータを取得する。そして、第3の実施形態では、検出部16bは、第1の実施形態で説明した方法により、組織ボリュームデータのクリップ領域を検出する。そして、第3の実施形態に係る検出部16bは、上述したフライスルー表示で抽出される中心線を用いて、以下の処理を行なう。
検出部16bは、更に、内腔領域の中心線に直交する複数の断面それぞれにおける当該内腔領域の面積を算出する。そして、検出部16bは、算出した面積が周囲の断面で算出された面積と比較して異なる断面を、異常断面として検出する。図12は、第3の実施形態に係る検出部を説明するための図である。
例えば、検出部16bは、図12に示すように、画像生成部14が抽出した内腔領域210の中心線211に直交する複数の断面を設定する。例えば、検出部16bは、中心線211に沿って一定の間隔(例えば、1mm)で複数の断面を設定する。なお、間隔は、操作者により設定される場合であっても、初期設定される場合であっても良い。
そして、検出部16bは、各断面と内腔領域210の輪郭(クリップ領域)との交線で囲まれる部分の面積を算出する。ここで、内腔領域210を血管の内腔領域とすると、検出部16bが各断面で算出した面積は、血管の内壁の断面積となる。
例えば、狭窄部位を含む断面で算出された断面積は、周囲の断面で算出された断面積より急激に小さくなる。一方、動脈瘤のように血管に瘤がある部位を含む断面で算出された断面積は、周囲の断面で算出された断面積より大きくなる。
そこで、検出部16bは、例えば、面積が最小となる断面や、面積が最大となる断面を異常断面として検出する。或いは、検出部16bは、検出精度を高めるため、例えば、中心線211に沿って、面積の変化量を算出し、変化量がピークとなる断面を異常断面として検出しても良い。
或いは、検出部16bは、検出精度を更に高めるために、流体ボリュームデータの流体情報を検出用のパラメータとして用いても良い。流体ボリュームデータとしてカラードプラボリュームデータを収集している場合、検出部16bは、各断面の交線内で抽出された速度を抽出する。狭窄部位は、血管断面積が小さいために流速が早くなる傾向がある。そこで、検出部16bは、例えば、面積が所定の閾値より小さい断面の中で、流速が最大となる断面を、異常断面として検出する。
上記の処理を行なうことで、検出部16bは、例えば、図12に示すように、異常断面213を検出する。異常断面213は、図12に示すように、狭窄部位212の中で、最も狭窄している部位を通る断面となる。
そして、第3の実施形態に係る画像生成部14は、異常断面を用いて、画像処理対象のボリュームデータである組織ボリュームデータ(Bモードボリュームデータ)からモニタ2に表示する画像データを生成する。換言すると、画像生成部14は、レンダリング処理を行なうクリップ面として異常断面を用いる。以下、第3の実施形態に係る画像生成部14が生成する画像データについて、図13~図15を用いて説明する。図13~図15は、第3の実施形態に係る画像生成部を説明するための図である。
図13に示す一例では、画像生成部14は、Bモードボリュームデータ200を異常断面213で切断して2つの領域に分断し、一方の領域を除去したBモードボリュームデータ201を生成する。なお、図13に示す点214は、異常断面213と中心線211との交点である。画像生成部14は、Bモードボリュームデータ201を用いて画像データを生成する。
例えば、画像生成部14は、図13に示すように、Bモードボリュームデータ201の表面に位置する異常断面213のMPR画像データ215を生成する。MPR画像データ215には、図13に示すように、異常断面213における血管の内壁とともに外壁が描出されている。MPR画像データ215を観察することで、操作者は、狭窄部位212の最も隆起した部分の形状を把握することができる。
なお、画像生成部14は、Bモードボリュームデータ201を用いてVR画像やMIP画像を生成しても良い。また、画像生成部14は、異常断面213及び異常断面213に平行な断面で挟まれる領域のBモードボリュームデータ201を用いて、厚み付きMIP画像を生成しても良い。
図14に示す一例では、クリップ断面である異常断面213を、点214を中心として自由回転させて、クリップ断面を変更する場合を示している。例えば、操作者は、トラックボールを操作して、図14に示すように、異常断面213を回転した断面216をクリップ断面として設定する。例えば、断面216は、異常断面213に直交する断面である。
画像生成部14は、図14に示すように、Bモードボリュームデータ200を断面216で切断して2つの領域に分断し、一方の領域を除去したBモードボリュームデータ202を生成する。そして、画像生成部14は、Bモードボリュームデータ202を用いて画像データを生成する。
例えば、画像生成部14は、図14に示すように、Bモードボリュームデータ202の表面に位置する断面216のMPR画像データ217を生成する。MPR画像データ217には、図14に示すように、血管の走行方向に略沿った断面216における血管の内壁とともに外壁が描出されている。MPR画像データ217を観察することで、操作者は、狭窄部位212の血管の走行方向に沿った形状を把握することができる。
なお、画像生成部14は、Bモードボリュームデータ202を用いてVR画像やMIP画像を生成しても良い。また、画像生成部14は、断面216及び断面216に平行な断面で挟まれる領域のBモードボリュームデータ202を用いて、厚み付きMIP画像を生成しても良い。
図15に示す一例では、検出部16bが検出した異常断面213から特定される点214を用いて、フライスルー表示を行なうための開始点が自動的に設定される場合を示している。検出部16bは、図15に示すように、点214の近傍に位置する中心線211上の点217を、フライスルー表示を開始する視点とする。例えば、検出部16bは、中心線211に沿って、点214から3cm離れた位置の点を点217として設定する。
画像生成部14は、点217から狭窄部位212に向かう視線方向でVE画像を生成する。更に、画像生成部14は、点217から点214に向かって視点を移動して、新規のVE画像を順次生成する。これにより、操作者は、狭窄部位212を中心にしたフライスルー表示を重点的に観察することができる。なお、第3の実施形態は、異常断面が複数検出される場合であっても良い。
次に、図16を用いて、第3の実施形態に係る超音波診断装置の処理について説明する。図16は、第3の実施形態に係る超音波診断装置処理例を説明するためのフローチャートである。なお、図16に示すフローチャートは、クリップ領域の検出後に、クリップ面である異常断面が自動的に検出される場合を示している。しかし、第3の実施形態は、操作者が手動でクリップ面の検出要求を行なう場合であっても良い。
図16に示すように、第3の実施形態に係る超音波診断装置は、クリップ領域が検出されたか否かを判定する(ステップS301)。ここで、クリップ領域が検出されていない場合(ステップS301否定)、超音波診断装置は、クリップ領域が検出されるまで待機する。
一方、クリップ領域が検出された場合(ステップS301肯定)、検出部16bは、中心線に直交する複数の断面を設定する(ステップS302)。そして、検出部16bは、複数の断面のおけるクリップ領域の面積を算出し(ステップS303)、異常断面となるクリップ面を検出する(ステップS304)。
そして、画像生成部14は、クリップ面を用いて、Bモードボリュームデータから表示用の画像データを生成する(ステップS305)。そして、制御部16の制御により、モニタ2は、画像データを表示し(ステップS306)、処理を終了する。
上述したように、第3の実施形態では、クリップ領域を利用して、狭窄や血管瘤が発生している部位を異常断面として容易に検出することができる。また、第3の実施形態では、異常断面をクリップ面として用いて各種画像データを生成するので、血管等の管腔の形態異常を詳細に観察することができる。
従って、第3の実施形態では、非侵襲という特性を有する超音波診断装置を用いた血管の形態異常診断における診断精度を向上し、および検査効率を向上することができる。
なお、上記の第1~第3の実施形態では、組織ボリュームデータとしてBモードボリュームデータを用い、流体ボリュームデータとしてパワーボリュームデータ又はカラードプラデータを用いる場合について説明した。しかし、第1~第3の実施形態は、組織ボリュームデータとして3次元のBモードデータを用い、流体ボリュームデータとして3次元のドプラデータを用いる場合であっても良い。かかる場合、検出部16bは、3次元のドプラデータのパワー値を用いて、3次元のBモードデータにおけるクリップ領域を検出し、更に、検出したクリップ領域を用いて、Bモードボリュームデータにおけるクリップ領域を検出する。
また、上記の第1~第3の実施形態で説明した画像処理方法は、以下に説明する2つの変形例(第1の変形例及び第2の変形例)により行なわれても良い。
まず、第1の変形例について説明する。上記の第1~第3の実施形態では、画像処理対象のボリュームデータとして用いる組織ボリュームデータが、流体ボリュームデータを収集した領域を超音波により3次元走査して生成された組織ボリュームデータである場合について説明した。しかし、上記の第1~第3の実施形態で説明した画像処理方法は、画像処理対象のボリュームデータとして用いる組織ボリュームデータが、流体ボリュームデータを収集した領域を超音波診断装置とは異なる種類の医用画像診断装置により3次元撮影して生成された組織ボリュームデータである場合にも適用できる。第1の変形例では、取得部16aは、組織ボリュームデータとして、超音波診断装置とは異なる種類の医用画像診断装置により、流体ボリュームデータを収集した領域を3次元撮影して生成された組織ボリュームデータを取得する。
そして、第1の変形例では、検出部16bは、流体ボリュームデータと組織ボリュームデータとの位置合わせを行なった後に、組織ボリュームデータに含まれる管腔の内腔領域を検出する。
図17は、第1の変形例を説明するための図である。例えば、取得部16aは、図17に示すように、X線CTボリュームデータ101を取得する。取得部16aは、操作者の指示に基づいて、X線CTボリュームデータ101を、図示しないインターフェースを経由して、X線CT装置や、医用画像のデータベースから取得する。X線CTボリュームデータ101は、流体ボリュームデータを収集する領域を撮影した組織ボリュームデータである。具体的には、X線CTボリュームデータ101は、VE画像のフライスルー表示用に、操作者が指定した組織CTボリュームデータである。
ここで、第1の変形例を行なう場合、例えば、図17に示すように、位置センサ4及びトランスミッター5を用いた位置検出システムが用いられる。位置センサ4は、例えば、磁気センサであり、超音波プローブ1に取り付けられる。トランスミッター5は、例えば、超音波プローブ1の近傍に配置され、自装置を中心として外側に向かって磁場を形成する装置である。
位置センサ4は、トランスミッター5によって形成された3次元の磁場を検出する。そして、位置センサ4は、検出した磁場の情報に基づいて、トランスミッター5を原点とする空間における自装置の位置(座標及び角度)を算出し、算出した位置を検出部16bに送信する。ここで、位置センサ4は、自装置が位置する3次元の座標及び角度を、超音波プローブ1の3次元位置情報として、検出部16bに送信する。これにより、検出部16bは、超音波プローブ1の3次元位置情報を取得する。
操作者は、被検体Pの管腔を含む領域でBモード用の超音波走査を行う。例えば、操作者は、まず、超音波プローブ1を用いて、図17に示すように、断面300で被検体Pの2次元走査を行う。ここで、断面300は、例えば、3次元走査が行われる領域の中心に位置する断面として設定される。制御部16は、送受信部11を介して超音波送受信を制御する。このことから、検出部16bは、断面300の超音波プローブ1に対する相対的な位置を取得可能である。また、検出部16bは、超音波プローブ1の3次元位置情報を取得していることから、断面300の実空間における3次元位置情報を取得可能である。
モニタ2は、図17に示すように、断面300を2次元走査して生成された2次元のBモード画像データ301を表示する。操作者は、モニタ2に表示されたBモード画像データ301を参照しながら、VE画像の表示対象となる被検体Pの管腔が画像内の略中心に描出されるように、位置センサ4が取り付けられた超音波プローブ1を操作する。また、操作者は、被検体Pの管腔が描出されたX線CT画像データがモニタ2に表示されるように、入力装置3を介してMPR処理用の切断面の位置を調整する。これにより、モニタ2は、図17に示すように、X線CTボリュームデータ101のMPR画像データ102を表示する。
そして、操作者は、MPR画像データ102に描出された特徴部分と同一の特徴部分がBモード画像データ301で描出された場合、確定ボタンを押下する。また、操作者は、各画像において、特徴部分の中心位置を、マウスを用いて指定する。或いは、操作者は、各画像において、複数の特徴部分の位置を、マウスを用いて指定する。そして、操作者は、確定ボタン押下時の断面300を含む3次元領域で、流体ボリュームデータを収集するために、ドプラモードで被検体Pの3次元走査を行なう。
これにより、画像生成部14は、流体ボリュームデータ(例えば、パワーボリュームデータ)を生成する。検出部16bは、確定ボタン押下時の各種情報を用いて、流体ボリュームデータとX線CTボリュームデータ101との位置合わせを行なう。確定ボタン押下時の各種情報とは、確定ボタン押下時のMPR画像データ102に対応する断面のX線CTボリュームデータ101における3次元位置情報と、確定ボタン押下時のBモード画像データ301に対応する断面300の実空間における3次元位置情報である。検出部16bは、超音波送受信条件及びスキャンコンバートの条件等から、断面300の実空間における3次元位置情報を、断面300の流体ボリュームデータにおける3次元位置情報に変換する。また、確定ボタン押下時の各種情報とは、MPR画像データ102及びBモード画像データ301それぞれの特徴部位の位置情報である。例えば、検出部16bは、これら各種情報を用いて、流体ボリュームデータの座標系をX線CTボリュームデータ101の座標系に変換するための変換行列を生成する。
なお、第1の変形例では、検出部16bは、流体ボリュームデータと同一の時相で収集されたBモードボリュームデータと、他種の組織ボリュームデータとの位置合わせを、操作者が指定した3つ以上の特徴部位を用いて行なっても良い。また、検出部16bは、流体ボリュームデータと同一の時相で収集されたBモードボリュームデータと、他種の組織ボリュームデータとの位置合わせを、例えば、エッジ検出処理や、特徴点検出処理等を用いて行なっても良い。これにより、検出部16bは、流体ボリュームデータと他種の組織ボリュームデータとの位置合わせを行なうことができる。
そして、検出部16bは、第1の実施形態で説明したように、流体ボリュームデータの流体領域を検出する。そして、検出部16bは、流体領域の3次元位置情報を、例えば、上記の変換行列を用いて、X線CTボリュームデータ101における3次元位置情報に変換する。かかる3次元位置情報は、X線CTボリュームデータ101における管腔の内腔領域となる。これにより、画像生成部14は、X線CTボリュームデータ101から、第1の実施形態で図6を用いて説明した処理を行なって、フライスルー表示用のVE画像を生成する。なお、画像生成部14は、X線CTボリュームデータ101から、第1の実施形態で図7A、B及びCを用いて説明した各種画像データを生成しても良い。
また、第1の変形例でも、第2の実施形態で説明したように、他種の組織ボリュームデータ及び流体ボリュームデータが連続収集されている場合、取得部16aは、被検体Pの生体信号を用いて、同一時相の他種の組織ボリュームデータと流体ボリュームデータとを取得する。そして、検出部16bは、同一時相の他種の組織ボリュームデータと流体ボリュームデータとの位置合わせを行なった後、内腔領域の検出を行なう。
また、第1の変形例でも、第3の実施形態で説明したように、検出部16bは、他種の組織ボリュームデータから、異常断面を検出しても良い。また、第1の変形例でも、第3の実施形態で説明したように、画像生成部14は、異常断面を用いて、他種の組織ボリュームデータからモニタ2に表示する画像データを生成しても良い。
第1の変形例では、流体ボリュームデータを用いることで、例えば、非造影のX線CTボリュームデータやMRIボリュームデータの管腔の内腔領域を容易に検出することができる。
次に、第2の変形例について、図18等を用いて説明する説明する。図18は、第2の変形例を説明するための図である。第2の変形例では、画像処理対象のボリュームデータとして流体ボリュームデータが用いられる。第2の変形例では、取得部16aは、流体ボリュームを取得する。そして、検出部16aは、流体ボリュームデータで検出した流体領域を、この流体ボリュームデータにおける管腔の内腔領域として検出する。
例えば、検出部16bは、図2に示すように、パワーボリュームデータ100の流体領域110を検出する。そして、検出部16bは、図18の左図に示すように、流体領域110をパワーボリュームデータ100における管腔の内腔領域111として検出する。なお、図18の左図では、パワーボリュームデータ100及び内腔領域111を2次元のデータとして示しているが、実際には、パワーボリュームデータ100及び内腔領域111は、3次元のデータである。また、図18の左図では、輝度値が付与された流体領域110である内腔領域111をハッチングで示し、流体が存在しない領域(パワーボリュームデータ100で内腔領域111以外の領域)を白で示している。
そして、第2の変形例では、画像生成部14は、検出部16bが検出した内腔領域を用いて、流体ボリュームデータから擬似ボリュームデータを生成する。具体的には、画像生成部14は、流体ボリュームデータから検出部16bが検出した内腔領域を除去する。更に、画像生成部14は、検出部16bが検出した内腔領域に基づいて少なくとも管腔の内壁に所定の輝度値を付与する。
例えば、画像生成部14は、内腔領域111に輝度値「0」を付与し、パワーボリュームデータ100で内腔領域111以外の領域に輝度値「1」を付与する。これにより、画像生成部14は、内腔領域111が除去され、かつ、管腔の内壁に対応するボクセルに輝度値「1」が付与された擬似ボリュームデータ120を生成する(図18の右図を参照)。なお、図18の右図では、擬似ボリュームデータ120を2次元のデータとして示しているが、実際には、擬似ボリュームデータ120は、3次元のデータである。また、図18の右図では、輝度値「1」が付与された領域、すなわち、管腔の内壁等、流体が存在しない領域を黒で示している。また、図18の右図では、輝度値「0」を付与した領域、すなわち、除去された内腔領域111を白で示している。なお、画像生成部14は、例えば、パワーボリュームデータ100で内腔領域111以外の領域の中で、管腔の内壁及び内壁近傍のみに輝度値「1」が付与して、擬似ボリュームデータ120を生成しても良い。
そして、画像生成部14は、管腔の内部に設定した視点から擬似ボリュームデータ120を投影した投影像(VE画像)を、モニタ2に表示する画像データとして生成する。また、画像生成部14は、擬似ボリュームデータ120から管腔の中心線を抽出する。そして、画像生成部14は、中心線に沿って視点を移動させた複数の投影像(VE画像)を、モニタ2に動画表示する画像データ群として生成する。
なお、第2の変形例でも、第3の実施形態で説明したように、検出部16bは、画像処理対象のボリュームデータであるパワーボリュームデータ100から生成された擬似ボリュームデータ120から、異常断面を検出しても良い。また、第2の変形例でも、第3の実施形態で説明したように、画像生成部14は、異常断面を用いて、擬似ボリュームデータ120からモニタ2に表示する画像データを生成しても良い。
第2の変形例では、管腔の内腔領域を容易に検出できるドプラボリュームデータ(流体ボリュームデータ)のみを用いて、フライスルー表示を行なうことができる。
また、第1の実施形態~第3の実施形態、第1の変形例及び第2の変形例で説明した画像処理方法は、超音波診断装置とは独立に設置された画像処理装置により行なわれる場合であってもよい。かかる画像処理装置は、3次元のBモードデータ及び3次元のドプラデータや、Bモードボリュームデータ及びドプラボリュームデータを取得することで、第1の実施形態~第3の実施形態で説明した画像処理方法を行なうことができる。また、かかる画像処理装置は、3次元のドプラデータやドプラボリュームデータと、他種組織ボリュームデータと、位置合わせ情報(例えば、変換行列)とを取得することで、第1の変形例で説明した画像処理方法を行なうことができる。また、かかる画像処理装置は、3次元のドプラデータや、ドプラボリュームデータを取得することで、第2の変形例で説明した画像処理方法を行なうことができる。
また、図示した各装置の各構成要素は機能概念的なものであり、必ずしも物理的に図示の如く構成されていることを要しない。すなわち、各装置の分散・統合の具体的形態は図示のものに限られず、その全部又は一部を、各種の負荷や使用状況等に応じて、任意の単位で機能的又は物理的に分散・統合して構成することができる。更に、各装置にて行なわれる各処理機能は、その全部又は任意の一部が、CPUおよび当該CPUにて解析実行されるプログラムにて実現され、あるいは、ワイヤードロジックによるハードウェアとして実現され得る。
また、第1の実施形態~第3の実施形態、第1の変形例及び第2の変形例で説明した画像処理方法は、あらかじめ用意された画像処理プログラムをパーソナルコンピュータやワークステーション等のコンピュータで実行することによって実現することができる。この画像処理プログラムは、インターネット等のネットワークを介して配布することができる。また、この制御プログラムは、ハードディスク、フレキシブルディスク(FD)、CD-ROM、MO、DVD、USBメモリ及びSDカードメモリ等のFlashメモリ等のコンピュータで読み取り可能な非一時的な記録媒体に記録され、コンピュータによって非一時的な記録媒体から読み出されることによって実行することもできる。
以上、説明したとおり、第1の実施形態~第3の実施形態、第1の変形例及び第2の変形例によれば、管腔の内腔領域を容易に検出することができる。
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれると同様に、請求の範囲に記載された発明とその均等の範囲に含まれるものである。
Claims (13)
- 超音波により3次元走査された領域内を流動する流体に関する流体情報を示す流体ボリュームデータを取得する取得部と、
前記流体情報を用いて前記領域内で流体が存在する領域を検出し、当該検出した領域を用いて、画像処理対象のボリュームデータにおける管腔の内腔領域を検出する検出部と、
を備える、超音波診断装置。 - 前記取得部は、更に、前記画像処理対象のボリュームデータとして、前記領域内の組織形状を示す組織ボリュームデータを取得し、
前記検出部は、前記流体情報を用いて前記領域内で流体が存在する領域を検出し、当該検出した領域を用いて、前記組織ボリュームデータに含まれる管腔の内腔領域を検出する、請求項1に記載の超音波診断装置。 - 前記検出部が検出した前記内腔領域に基づいて、前記管腔の内部に設定した視点から前記組織ボリュームデータを投影した投影像を、所定の表示部に表示する画像データとして生成する画像生成部、
を更に備える、請求項2に記載の超音波診断装置。 - 前記画像生成部は、前記組織ボリュームデータから前記内腔領域を除去したデータから前記管腔の中心線を抽出し、当該中心線に沿って視点を移動させた複数の投影像を、前記所定の表示部に動画表示する画像データ群として生成する、請求項3に記載の超音波診断装置。
- 前記取得部は、前記組織ボリュームデータと前記流体ボリュームデータとが異なる時期に個別に連続収集された場合、データが収集された被検体の生体信号を用いて、同一時相の組織ボリュームデータと流体ボリュームデータとを取得し、
前記検出部は、前記同一時相の組織ボリュームデータと流体ボリュームデータとを用いて、前記内腔領域の検出を行なう、請求項2に記載の超音波診断装置。 - 前記取得部は、前記組織ボリュームデータとして、前記領域を超音波により3次元走査して生成された組織ボリュームデータを取得する、請求項2に記載の超音波診断装置。
- 前記取得部は、前記組織ボリュームデータとして、超音波診断装置とは異なる種類の医用画像診断装置により前記領域を3次元撮影して生成された組織ボリュームデータを取得し、
前記検出部は、前記流体ボリュームデータと前記組織ボリュームデータとの位置合わせを行なった後に、前記組織ボリュームデータに含まれる管腔の内腔領域を検出する、請求項2に記載の超音波診断装置。 - 前記検出部は、前記画像処理対象のボリュームデータとして前記流体ボリュームデータを用いる場合、前記領域内で流体が存在する領域を、前記流体ボリュームデータにおける管腔の内腔領域として検出し、
前記検出部が検出した前記内腔領域を除去し、前記検出部が検出した前記内腔領域に基づいて少なくとも前記管腔の内壁に所定の輝度値を付与して、前記流体ボリュームデータから擬似ボリュームデータを生成し、前記管腔の内部に設定した視点から前記擬似ボリュームデータを投影した投影像を、所定の表示部に表示する画像データとして生成する画像生成部、
を更に備える、請求項1に記載の超音波診断装置。 - 前記画像生成部は、前記擬似ボリュームデータから前記管腔の中心線を抽出し、当該中心線に沿って視点を移動させた複数の投影像を、前記所定の表示部に動画表示する画像データ群として生成する、請求項8に記載の超音波診断装置。
- 前記検出部は、更に、前記内腔領域の中心線に直交する複数の断面それぞれにおける当該内腔領域の面積を算出し、算出した面積が周囲の断面で算出された面積と比較して異なる断面を、異常断面として検出する、請求項1に記載の超音波診断装置。
- 前記異常断面を用いて、前記画像処理対象のボリュームデータから所定の表示部に表示する画像データを生成する画像生成部、
を更に備えたことを特徴とする請求項10に記載の超音波診断装置。 - 超音波により3次元走査された領域内を流動する流体に関する流体情報を示す流体ボリュームデータを取得する取得部と、
前記流体情報を用いて前記領域内で流体が存在する領域を検出し、当該検出した領域を用いて、画像処理対象のボリュームデータにおける管腔の内腔領域を検出する検出部と、
を備える、画像処理装置。 - 取得部が、超音波により3次元走査された領域内を流動する流体に関する流体情報を示す流体ボリュームデータを取得し、
検出部が、前記流体情報を用いて前記領域内で流体が存在する領域を検出し、当該検出した領域を用いて、画像処理対象のボリュームデータにおける管腔の内腔領域を検出する、
ことを含む、画像処理方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201380000553.0A CN103429162B (zh) | 2012-03-26 | 2013-03-25 | 超声波诊断装置、图像处理装置以及图像处理方法 |
| US14/481,414 US10182793B2 (en) | 2012-03-26 | 2014-09-09 | Ultrasonic diagnostic apparatus, image processing apparatus, and image processing method |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012-070207 | 2012-03-26 | ||
| JP2012070207 | 2012-03-26 | ||
| JP2013062840A JP6121766B2 (ja) | 2012-03-26 | 2013-03-25 | 超音波診断装置、画像処理装置及び画像処理方法 |
| JP2013-062840 | 2013-03-25 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US14/481,414 Continuation US10182793B2 (en) | 2012-03-26 | 2014-09-09 | Ultrasonic diagnostic apparatus, image processing apparatus, and image processing method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2013146716A1 true WO2013146716A1 (ja) | 2013-10-03 |
Family
ID=49259968
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2013/058651 WO2013146716A1 (ja) | 2012-03-26 | 2013-03-25 | 超音波診断装置、画像処理装置及び画像処理方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10182793B2 (ja) |
| JP (1) | JP6121766B2 (ja) |
| CN (1) | CN103429162B (ja) |
| WO (1) | WO2013146716A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160166236A1 (en) * | 2014-12-11 | 2016-06-16 | Samsung Medison Co., Ltd. | Ultrasound diagnostic apparatus and method of operating the same |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9877699B2 (en) | 2012-03-26 | 2018-01-30 | Teratech Corporation | Tablet ultrasound system |
| US10792011B2 (en) | 2015-06-23 | 2020-10-06 | Hemonitor Medical Ltd. | Systems and methods for hand-free continuous ultrasonic monitoring |
| WO2016207889A1 (en) * | 2015-06-23 | 2016-12-29 | Hemonitor Medical Ltd. | Continuous ultrasonic monitoring |
| JP6544092B2 (ja) * | 2015-07-08 | 2019-07-17 | 国立大学法人東京農工大学 | 血管径測定装置 |
| WO2018031754A1 (en) * | 2016-08-10 | 2018-02-15 | U.S. Government As Represented By The Secretary Of The Army | Automated three and four-dimensional ultrasound quantification and surveillance of free fluid in body cavities and intravascular volume |
| JP6849420B2 (ja) * | 2016-12-12 | 2021-03-24 | キヤノンメディカルシステムズ株式会社 | 超音波診断装置及び医用画像処理装置 |
| US11642106B2 (en) * | 2017-08-14 | 2023-05-09 | Stryker Corporation | Internal bleeding detection, assessment and monitoring devices, systems and methods |
| JP6556300B2 (ja) * | 2018-06-26 | 2019-08-07 | キヤノン株式会社 | 被検体情報取得装置、被検体情報取得方法およびプログラム |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008148858A (ja) * | 2006-12-15 | 2008-07-03 | Toshiba Corp | 3次元画像処理装置及び医用画像診断装置 |
| JP2009022342A (ja) * | 2007-07-17 | 2009-02-05 | Aloka Co Ltd | 超音波診断装置及び画像処理プログラム |
| JP2009125280A (ja) * | 2007-11-22 | 2009-06-11 | Toshiba Corp | 超音波診断装置及び穿刺支援用制御プログラム |
| WO2010055817A1 (ja) * | 2008-11-13 | 2010-05-20 | 株式会社 日立メディコ | 画像処理装置及び画像処理方法 |
| JP2012040207A (ja) * | 2010-08-19 | 2012-03-01 | Toshiba Corp | 超音波診断装置、超音波診断装置の制御プログラム、及び画像処理装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5669385A (en) * | 1996-03-13 | 1997-09-23 | Advanced Technology Laboratories, Inc. | Ultrasonic scanning of tissue motion in three dimensions |
| AUPP227898A0 (en) * | 1998-03-11 | 1998-04-09 | Commonwealth Scientific And Industrial Research Organisation | Improvements in ultrasound techniques |
| JP4260938B2 (ja) | 1998-10-23 | 2009-04-30 | 株式会社東芝 | 3次元超音波診断装置 |
| JP4676334B2 (ja) * | 2003-09-01 | 2011-04-27 | パナソニック株式会社 | 生体信号モニタ装置 |
| CA2543077A1 (en) * | 2003-10-29 | 2005-05-12 | Allez Physionix Ltd. | Method and apparatus for determining an ultrasound fluid flow centerline |
| US8047989B2 (en) * | 2004-03-15 | 2011-11-01 | Hitachi Medical Corporation | Medical imaging diagnosis apparatus and medical imaging diagnosis method |
| US8021300B2 (en) * | 2004-06-16 | 2011-09-20 | Siemens Medical Solutions Usa, Inc. | Three-dimensional fly-through systems and methods using ultrasound data |
| JP5078609B2 (ja) * | 2005-04-28 | 2012-11-21 | 株式会社日立メディコ | 画像表示装置及びプログラム |
| JP5384473B2 (ja) * | 2008-03-21 | 2014-01-08 | 株式会社日立メディコ | 画像表示装置及び画像表示方法 |
| JP5395538B2 (ja) * | 2009-06-30 | 2014-01-22 | 株式会社東芝 | 超音波診断装置及び画像データ表示用制御プログラム |
-
2013
- 2013-03-25 WO PCT/JP2013/058651 patent/WO2013146716A1/ja active Application Filing
- 2013-03-25 JP JP2013062840A patent/JP6121766B2/ja active Active
- 2013-03-25 CN CN201380000553.0A patent/CN103429162B/zh not_active Expired - Fee Related
-
2014
- 2014-09-09 US US14/481,414 patent/US10182793B2/en not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008148858A (ja) * | 2006-12-15 | 2008-07-03 | Toshiba Corp | 3次元画像処理装置及び医用画像診断装置 |
| JP2009022342A (ja) * | 2007-07-17 | 2009-02-05 | Aloka Co Ltd | 超音波診断装置及び画像処理プログラム |
| JP2009125280A (ja) * | 2007-11-22 | 2009-06-11 | Toshiba Corp | 超音波診断装置及び穿刺支援用制御プログラム |
| WO2010055817A1 (ja) * | 2008-11-13 | 2010-05-20 | 株式会社 日立メディコ | 画像処理装置及び画像処理方法 |
| JP2012040207A (ja) * | 2010-08-19 | 2012-03-01 | Toshiba Corp | 超音波診断装置、超音波診断装置の制御プログラム、及び画像処理装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160166236A1 (en) * | 2014-12-11 | 2016-06-16 | Samsung Medison Co., Ltd. | Ultrasound diagnostic apparatus and method of operating the same |
| US10695033B2 (en) * | 2014-12-11 | 2020-06-30 | Samsung Medison Co., Ltd. | Ultrasound diagnostic apparatus and method of operating the same |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103429162A (zh) | 2013-12-04 |
| US10182793B2 (en) | 2019-01-22 |
| US20140378835A1 (en) | 2014-12-25 |
| CN103429162B (zh) | 2016-02-24 |
| JP6121766B2 (ja) | 2017-04-26 |
| JP2013226401A (ja) | 2013-11-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6121766B2 (ja) | 超音波診断装置、画像処理装置及び画像処理方法 | |
| JP5284123B2 (ja) | 超音波診断装置および位置情報取得プログラム | |
| JP5762076B2 (ja) | 超音波診断装置、超音波画像処理装置及び医用画像診断装置 | |
| JP5868067B2 (ja) | 医用画像診断装置、画像処理装置及び方法 | |
| JP5395371B2 (ja) | 超音波診断装置、超音波画像の取得方法及びプログラム | |
| JP7461530B2 (ja) | 超音波診断装置及び穿刺支援プログラム | |
| WO2014081006A1 (ja) | 超音波診断装置、画像処理装置および画像処理方法 | |
| JP5422264B2 (ja) | 超音波診断装置及び医用画像処理装置 | |
| JP6125380B2 (ja) | 超音波診断装置、医用画像処理装置及び画像処理プログラム | |
| JP5897674B2 (ja) | 超音波診断装置、画像処理装置及び画像処理プログラム | |
| JP5984252B2 (ja) | 超音波診断装置、画像処理装置及びプログラム | |
| JP6037447B2 (ja) | 超音波診断装置 | |
| JP6391922B2 (ja) | 医用画像診断装置、画像処理装置及び画像処理方法 | |
| JP5689591B2 (ja) | 超音波診断装置及び超音波画像処理プログラム | |
| JP2010284516A (ja) | 超音波診断装置、超音波画像処理装置及び超音波画像処理プログラム | |
| JP2012030053A (ja) | 超音波診断装置、画像処理装置および画像処理方法 | |
| JP5942217B2 (ja) | 超音波診断装置、超音波画像処理装置及び超音波画像処理プログラム | |
| JP5121384B2 (ja) | 超音波診断装置 | |
| JP7258538B2 (ja) | 超音波診断装置、医用情報処理装置、医用情報処理プログラム | |
| US20120095341A1 (en) | Ultrasonic image processing apparatus and ultrasonic image processing method | |
| JP2018094020A (ja) | 超音波診断装置及び医用画像処理装置 | |
| JP2013143978A (ja) | 超音波診断装置 | |
| US20190008482A1 (en) | Medical image diagnostic apparatus, medical image processing apparatus, and medical image processing method | |
| JP2012245092A (ja) | 超音波診断装置 | |
| JP2019195447A (ja) | 超音波診断装置及び医用情報処理プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 201380000553.0 Country of ref document: CN |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 13768012 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 13768012 Country of ref document: EP Kind code of ref document: A1 |