WO2012086458A1 - モータ駆動制御装置 - Google Patents
モータ駆動制御装置 Download PDFInfo
- Publication number
- WO2012086458A1 WO2012086458A1 PCT/JP2011/078760 JP2011078760W WO2012086458A1 WO 2012086458 A1 WO2012086458 A1 WO 2012086458A1 JP 2011078760 W JP2011078760 W JP 2011078760W WO 2012086458 A1 WO2012086458 A1 WO 2012086458A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- torque
- value
- unit
- smoothing
- motor drive
- Prior art date
Links
- 238000009499 grossing Methods 0.000 claims abstract description 108
- 238000012545 processing Methods 0.000 claims abstract description 64
- 238000000034 method Methods 0.000 claims abstract description 28
- 230000008569 process Effects 0.000 claims abstract description 16
- 238000004364 calculation method Methods 0.000 claims description 81
- 238000001514 detection method Methods 0.000 claims description 42
- 230000002441 reversible effect Effects 0.000 claims description 25
- 238000012937 correction Methods 0.000 claims description 17
- 230000008859 change Effects 0.000 claims description 9
- 230000007812 deficiency Effects 0.000 claims description 8
- 230000004044 response Effects 0.000 claims description 4
- 238000005070 sampling Methods 0.000 claims description 3
- 238000012360 testing method Methods 0.000 claims description 2
- 230000002950 deficient Effects 0.000 abstract 2
- 238000010586 diagram Methods 0.000 description 32
- 230000001172 regenerating effect Effects 0.000 description 13
- 238000006243 chemical reaction Methods 0.000 description 9
- 230000009194 climbing Effects 0.000 description 9
- 230000008929 regeneration Effects 0.000 description 9
- 238000011069 regeneration method Methods 0.000 description 9
- 238000010200 validation analysis Methods 0.000 description 8
- 230000006870 function Effects 0.000 description 6
- 230000007704 transition Effects 0.000 description 5
- 235000014676 Phragmites communis Nutrition 0.000 description 4
- 230000007547 defect Effects 0.000 description 4
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 230000000295 complement effect Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 229910001416 lithium ion Inorganic materials 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 238000009789 rate limiting process Methods 0.000 description 2
- 241000282412 Homo Species 0.000 description 1
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 1
- 238000000418 atomic force spectrum Methods 0.000 description 1
- 230000033228 biological regulation Effects 0.000 description 1
- 235000019788 craving Nutrition 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005669 field effect Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 229910000652 nickel hydride Inorganic materials 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 238000010079 rubber tapping Methods 0.000 description 1
- 229920006395 saturated elastomer Polymers 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000035807 sensation Effects 0.000 description 1
- 230000001502 supplementing effect Effects 0.000 description 1
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M6/00—Rider propulsion of wheeled vehicles with additional source of power, e.g. combustion engine or electric motor
- B62M6/40—Rider propelled cycles with auxiliary electric motor
- B62M6/45—Control or actuating devices therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/20—Electric propulsion with power supplied within the vehicle using propulsion power generated by humans or animals
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M6/00—Rider propulsion of wheeled vehicles with additional source of power, e.g. combustion engine or electric motor
- B62M6/40—Rider propelled cycles with auxiliary electric motor
- B62M6/45—Control or actuating devices therefor
- B62M6/50—Control or actuating devices therefor characterised by detectors or sensors, or arrangement thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/24—Personal mobility vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/46—Vehicles with auxiliary ad-on propulsions, e.g. add-on electric motor kits for bicycles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Definitions
- the present invention relates to motor drive control.
- the motor is driven according to the pedal effort and a preset assist ratio.
- an assist torque obtained by multiplying a pedal input torque corresponding to the pedal depression force by an assist ratio corresponding to the pedal depression force may be employed.
- control is performed to gradually reduce the assist ratio according to the vehicle speed in order to avoid sudden stop of the assist when the vehicle speed exceeds a predetermined value. Yes.
- Fig. 1 shows the change in assist torque over time when the pedal depression force is simply multiplied by the assist ratio.
- the dotted line represents pedal input torque
- the solid line represents assist torque obtained by multiplying the pedal input torque by an assist ratio corresponding to the pedal depression force.
- the pedal input torque is input in a waved form, so that the assist torque itself is also waved simply by multiplying the assist ratio according to the pedal effort.
- the assist feeling becomes weak when the pedal depression force cannot be applied, so the feeling of assist is not good.
- the assist torque since the assist torque temporarily increases, the peak of the motor drive current also increases, resulting in driving with a large loss from the viewpoint of electrical efficiency.
- the control device for a vehicle with an auxiliary power device generates a human driving force that pulsates according to the rotational motion of the pedal crank and an auxiliary power from the auxiliary power driving portion with respect to the vehicle running portion for running.
- a detection unit that detects human power driving force, and a work by human power driving force in a period in which the detected human power driving force is equal to or greater than a threshold value when limiting auxiliary power.
- a correction unit that calculates the amount, a correction unit that obtains auxiliary power by increasing the output current according to the detected human power driving force according to the calculated work amount after the time when the amount is equal to or less than the threshold, and correction And a control unit that controls to output the auxiliary power.
- Japanese Patent Application Laid-Open No. 8-295285 discloses a technique for improving traveling performance on an uphill road or the like. Specifically, it includes a human-powered drive mechanism that drives a wheel by pedal depression force, and an auxiliary drive mechanism that gives an auxiliary drive force to the wheel according to the magnitude of the pedal force, and the resultant force of the pedal depression force and the auxiliary drive force
- a driving device for a power assist vehicle is configured to supply the wheel to a wheel
- a pedaling force cycle detection unit for detecting the pedal tapping force cycle tn (t1 to t5), and an auxiliary driving force applied to the pedaling force cycle tn
- a delay time control unit that makes the delay time (tn ⁇ constant C) proportional.
- the auxiliary driving force since the application of the auxiliary driving force is delayed so that the maximum auxiliary driving force is approximated when the pedaling force is minimum, the constant resultant force averaged by supplementing the valley of the pedaling force with the auxiliary driving force is obtained. Can supply. As a result, the fluctuation of the resultant force is suppressed, and the speed reduction due to the valley of the resultant force when traveling on an uphill road or the like is reduced, and stable traveling performance is obtained.
- the auxiliary driving force since the auxiliary driving force is added with a delay, the auxiliary driving force cannot be dealt with at the start of rowing. Similarly, it is not possible to appropriately deal with cases other than when a large amount of assistance such as climbing is necessary.
- Japanese Patent No. 3301811 discloses a technique for increasing the battery dischargeable capacity and extending the battery life when the motor output is controlled according to the pedal effort. Specifically, in a bicycle with an electric motor that provides a human-powered drive system and an electric drive system in parallel and controls the output of the electric drive system in response to changes in the pedaling force due to human power, a pedaling force detection unit that detects the pedaling force; A motor output calculation unit that determines a constant output of the electric motor over the next one cycle based on a measured value within one cycle of the treading force that is formed by the CPU and obtained every fixed time dt, and the obtained motor output And an output control unit for generating.
- a pedaling force detection unit that detects the pedaling force
- a motor output calculation unit that determines a constant output of the electric motor over the next one cycle based on a measured value within one cycle of the treading force that is formed by the CPU and obtained every fixed time dt, and the obtained motor output
- an output control unit for generating when processing is
- an object of the present invention is to provide a technique that enables sufficient assistance when starting out in a power-assisted bicycle.
- Another object of the present invention is to provide a technique for calculating an appropriate target torque following a periodically variable torque request.
- the motor drive control device includes (A) a smoothing processing unit that performs a smoothing process using values of pedal input torque at a plurality of time points to calculate a first smoothing torque value. And (B) a deficiency rate output unit for obtaining a ratio of points at which the pedal input torque input is insufficient among a plurality of points in time, (C) the first smoothing calculated by the pedal input torque and the smoothing processing unit An assist torque calculation unit that calculates an assist torque by performing a calculation process that mixes torque values according to the output of the deficiency rate output unit, and (D) a motor using the assist torque calculated by the assist torque calculation unit And a drive processing unit that performs processing for driving the drive.
- the above ratio becomes a high value at the time of rowing and the like, and as a result, the pedal input torque is added to the first smoothing torque value at a large rate, so that sufficient assistance is possible at the time of rowing.
- the smoothing processing unit described above is configured so that the pedal input torque at the plurality of time points within a variable period corresponding to one cycle of the pedal input torque having a variable cycle (including the case of approximately one cycle in addition to one cycle).
- a filter that calculates a moving average or a weighted moving average of the values as the first smoothing torque value may be included. In this way, an appropriate smoothing torque value is calculated by appropriately following the pedal input torque having a variable period.
- the filter described above may be an FIR (Finite Impulse Response) filter.
- the value of the tap coefficient of the FIR filter corresponding to both ends of the variable period may be set to smoothly change to the value of the tap coefficient corresponding to the other part of the variable period. For example, even when the synchronization with the pedal input torque is slightly shifted, an appropriate first smoothing torque value is calculated.
- the assist torque calculation unit described above sets the second smoothed torque value, which is the addition result of the first smoothed torque value and the correction value, and the value of the pedal input torque as an arbitrary positive or negative coefficient value. You may make it further have the torque addition part which carries out weighted addition. By introducing such a torque addition unit, an appropriate assist torque value can be calculated according to various situations.
- the assist torque calculation unit described above calculates the first torque value by subtracting the pedal input torque value from the second smoothing torque value that is the addition result of the first smoothing torque value and the correction value.
- a torque addition unit that adds the second smoothed torque value after multiplying the first torque value by an arbitrary positive or negative smoothing coefficient value may be further included.
- smoothing coefficient value may be set to increase in conjunction with the increase in the assist ratio that is set.
- a motor drive control device includes: (A) a smoothing processing unit that calculates a moving average or a weighted moving average of torque requests in a period corresponding to one cycle of a variable cycle torque request; B) A calculation unit that performs a calculation process using the processing result of the smoothing processing unit and the torque request to calculate a target torque corresponding to the torque request, and (C) a target torque calculated by the calculation unit. And a drive processing unit that performs processing for driving the motor.
- the smoothing processing unit may change the sampling timing of the torque request according to a pulse signal generated according to the rotation of the motor.
- the smoothing processing unit described above may be an FIR filter.
- the value of the tap coefficient of the FIR filter corresponding to both ends of the period may be set so as to smoothly change to the value of the tap coefficient corresponding to the other part of the period. Even in the case where it is impossible to completely follow the phase transition of the torque request with a variable period, smoothing can be performed appropriately.
- the smoothing processing unit described above may be an FIR filter.
- the calculation unit described above calculates a loss ratio calculation unit that calculates the ratio of the torque request value input to the FIR filter being 0, the output of the FIR filter, and the torque request value. You may make it have a smoothing torque value calculation part which mixes according to the said ratio and calculates a smoothing torque value. In this way, a sufficiently large target torque is output when the torque request is large even in a state where the torque request has not yet been input, such as at the start of rowing.
- the calculation unit described above may further include a torque addition unit that weights and adds the processing result of the smoothing processing unit and the torque request value with an arbitrary positive or negative coefficient value. In this way, an appropriate target torque can be set according to various situations.
- the calculation unit described above subtracts the torque request value from the processing result of the smoothing processing unit to calculate the first torque value, and any smoothing coefficient value positive or negative to the first torque value
- a torque addition unit that adds the smoothed torque value or a value obtained by multiplying the smoothed torque value by a predetermined number. Even with such a mounting method, an appropriate target torque can be set according to various situations.
- the motor drive control device determines the coefficient value according to a detection unit that detects a lower envelope of the vehicle speed that changes with time, and a value of the lower envelope that is detected by the detection unit. You may make it further have a determination part. Since the traveling state can be grasped by the height of the lower envelope of the vehicle speed, if the coefficient value is determined thereby, an appropriate target torque according to the situation can be calculated.
- the motor drive control device includes a detection unit that detects a lower envelope and an upper envelope of a vehicle speed that changes over time, and a lower envelope value and an upper envelope value that are detected by the detection unit.
- a determination unit that determines the coefficient values described above may be further included.
- the motor drive control device includes a detection unit that detects a lower envelope of a vehicle speed that changes with time, and the smoothing coefficient value and the above according to the value of the lower envelope detected by the detection unit You may make it further have a determination part which test
- the motor drive control device includes a detection unit that detects a lower envelope and an upper envelope of a vehicle speed that changes over time, and a lower envelope value and an upper envelope value that are detected by the detection unit. And a determination unit that determines at least one of the smoothing coefficient value and the predetermined number.
- a program for causing the microprocessor to perform the processing described above such as a flexible disk, an optical disk such as a CD-ROM, a magneto-optical disk, a semiconductor memory (for example, a ROM).
- a computer-readable storage medium such as a hard disk or a storage device.
- Data in the middle of processing is temporarily stored in a storage device such as a RAM (Random Access Memory).
- FIG. 1 is a diagram for explaining the prior art.
- FIG. 2 is a diagram illustrating an example of an electrically assisted bicycle.
- FIG. 3 is a functional block diagram related to the motor drive controller.
- FIGS. 4A to 4L are waveform diagrams for explaining the basic operation of motor driving.
- FIG. 5 is a functional block diagram of the calculation unit.
- FIG. 6 is a functional block diagram of the drive torque target calculation unit.
- FIG. 7 is a diagram for explaining the smoothing process.
- FIG. 8 is a diagram for explaining the smoothing process.
- FIG. 9 is a waveform diagram for explaining the calculation in the drive torque target calculation unit.
- FIG. 10 is a waveform diagram for explaining the calculation in the drive torque target calculation unit.
- FIG. 11 is a diagram for explaining the smoothing rate.
- FIG. 1 is a diagram for explaining the prior art.
- FIG. 2 is a diagram illustrating an example of an electrically assisted bicycle.
- FIG. 3 is a functional block diagram related to the motor
- FIG. 12 is a diagram for explaining the smoothing rate.
- FIG. 13 is a diagram for explaining the smoothing rate.
- FIG. 14 is a diagram for explaining the smoothing rate.
- FIG. 15 is a functional block diagram of the wheel rotation interlocking LPF unit.
- FIG. 16 is a diagram illustrating a configuration example of the FIR filter.
- FIG. 17 is a diagram illustrating another configuration example of the FIR filter.
- FIG. 18 is a diagram illustrating an example in which the smoothing rate is set according to the assist ratio.
- FIG. 19 is a diagram illustrating another example in which the smoothing rate is set according to the assist ratio.
- FIG. 20 is a diagram illustrating an example for determining the assist torque value according to the vehicle speed.
- FIG. 21 is a diagram illustrating the relationship between the vehicle speed and the pedal phase.
- FIG. 22 is a diagram for explaining detection of the lower envelope.
- FIG. 23 is a diagram for explaining detection of the lower envelope and the upper envelope.
- FIG. 24 is a diagram for explaining the parameter determination method.
- FIG. 25 is a diagram for explaining a parameter determination method.
- FIG. 26 is a functional block diagram for explaining another embodiment.
- FIG. 2 is an external view showing an example of the electrically assisted bicycle in the present embodiment.
- This electrically assisted bicycle 1 is of a general rear wheel drive type in which a crankshaft and a rear wheel are connected via a chain, and is equipped with a motor drive device.
- the motor drive device includes a secondary battery 101, a motor drive controller 102, a torque sensor 103, a brake sensor 104, a motor 105, and an operation panel 106.
- the secondary battery 101 is, for example, a lithium ion secondary battery having a maximum supply voltage (voltage at full charge) of 24 V, but may be another type of battery, such as a lithium ion polymer secondary battery, a nickel hydride storage battery, or the like. good.
- the torque sensor 103 is provided on a wheel attached to the crankshaft, detects the pedaling force of the pedal by the passenger, and outputs the detection result to the motor drive controller 102.
- the brake sensor 104 is composed of a magnet and a known reed switch.
- the magnet is fixed to a brake wire connected to the brake lever in a housing that fixes the brake lever and through which the brake wire is passed.
- the brake lever turns on the reed switch when it is gripped by hand.
- the reed switch is fixed in the housing.
- the reed switch conduction signal is sent to the motor drive controller 102.
- the motor 105 is, for example, a well-known three-phase DC brushless motor, and is attached to, for example, the front wheel of the electrically assisted bicycle 1.
- the motor 105 rotates the front wheel, and the rotor is connected to the front wheel so that the rotor rotates in accordance with the rotation of the front wheel.
- the motor 105 includes a rotation sensor such as a Hall element, and outputs rotor rotation information (that is, a Hall signal) to the motor drive controller 102.
- the operation panel 106 receives, for example, an instruction input regarding the presence / absence of assist from the user, and outputs the instruction input to the motor drive controller 102. Note that the operation panel 106 may receive an assist ratio setting input from the user and output the setting input to the motor drive controller 102.
- the motor drive controller 102 includes a controller 1020 and an FET (Field Effect Transistor) bridge 1030.
- the FET bridge 1030 includes a high side FET (S uh ) and a low side FET (S ul ) that perform switching for the U phase of the motor 105, and a high side FET (S vh ) that performs switching for the V phase of the motor 105, and It includes a low-side FET (S vl ), a high-side FET (S wh ) and a low-side FET (S wl ) that perform switching for the W phase of the motor 105.
- This FET bridge 1030 constitutes a part of a complementary switching amplifier.
- the FET bridge 1030 is provided with a thermistor 108 for measuring this temperature.
- the controller 1020 includes a calculation unit 1021, a temperature input unit 1022, a current detection unit 1023, a vehicle speed input unit 1024, a variable delay circuit 1025, a motor drive timing generation unit 1026, a torque input unit 1027, A brake input unit 1028 and an AD input unit 1029 are provided.
- the calculation unit 1021 is input from the operation panel 106 (for example, on / off and operation mode (for example, assist ratio)), input from the temperature input unit 1022, input from the current detection unit 1023, input from the vehicle speed input unit 1024, The calculation described below is performed using the input from the torque input unit 1027, the input from the brake input unit 1028, and the input from the AD input unit 1029. Subsequently, the output is output to the motor drive timing generation unit 1026 and the variable delay circuit 1025.
- the calculation unit 1021 includes a memory 10211, and the memory 10211 stores various data used for calculation, data being processed, and the like. Further, the calculation unit 1021 may be realized by executing a program by a processor. In this case, the program may be recorded in the memory 10211.
- the temperature input unit 1022 digitizes the input from the thermistor 108 and outputs it to the arithmetic unit 1021.
- the current detection unit 1023 is a detection resistor 107 that detects a current flowing through the FET in the FET bridge 1030, digitizes a voltage value corresponding to the current, and outputs the digitized value to the calculation unit 1021.
- the vehicle speed input unit 1024 calculates the current vehicle speed from the hall signal output from the motor 105 and outputs the current vehicle speed to the calculation unit 1021.
- the torque input unit 1027 digitizes a signal corresponding to the pedaling force from the torque sensor 103 and outputs the digitized signal to the calculation unit 1021.
- the brake input unit 1028 digitizes a signal corresponding to the braking force from the brake sensor 104 and outputs the digitized signal to the calculation unit 1021.
- An AD (Analog-Digital) input unit 1029 digitizes the output voltage from the secondary battery 101 and outputs the digitized voltage to the arithmetic unit 1021. Further, the memory 10211 may be provided separately from the calculation unit 1021.
- the calculation unit 1021 outputs the advance value to the variable delay circuit 1025 as the calculation result.
- the variable delay circuit 1025 adjusts the phase of the Hall signal based on the advance value received from the calculation unit 1021 and outputs the adjusted signal to the motor drive timing generation unit 1026.
- the calculation unit 1021 outputs, for example, a PWM (Pulse Width Modulation) code corresponding to the PWM duty ratio to the motor drive timing generation unit 1026 as a calculation result.
- the motor drive timing generation unit 1026 generates and outputs a switching signal for each FET included in the FET bridge 1030 based on the adjusted Hall signal from the variable delay circuit 1025 and the PWM code from the calculation unit 1021.
- FIGS. 4A shows the U-phase hall signal HU output from the motor 105
- FIG. 4B shows the V-phase hall signal HV output from the motor 105
- FIG. 4C shows the output from the motor 105.
- the hall signal represents the rotational phase of the motor.
- the rotational phase is not obtained as a continuous value, but may be obtained by another sensor or the like.
- the Hall element of the motor 105 is installed so that the Hall signal is output at a slightly advanced phase as shown in FIG. I have to. Therefore, the U-phase adjusted hall signal HU_In as shown in FIG.
- variable delay circuit 1025 is output from the variable delay circuit 1025 to the motor drive timing generation unit 1026, and the V-phase adjusted hall signal as shown in FIG.
- the signal HV_In is output from the variable delay circuit 1025 to the motor drive timing generation unit 1026, and the W-phase adjusted hall signal HW_In as illustrated in FIG. 4F is output from the variable delay circuit 1025 to the motor drive timing generation unit 1026.
- one period of the hall signal is divided into six phases with an electrical angle of 360 degrees.
- a counter electromotive force voltage called a Motor_U back electromotive force at the U phase terminal, a Motor_V back electromotive force at the V phase terminal, and a Motor_W back electromotive force at the W phase terminal. Occurs.
- switching signals as shown in FIGS. 4J to 4L are sent to the gates of the FETs of the FET bridge 1030. Output to.
- U_HS represents the gate signal of the U-phase high-side FET (S uh )
- U_LS represents the gate signal of the U-phase low-side FET (S ul ).
- PWM and “/ PWM” indicate a period of ON / OFF with a duty ratio corresponding to the PWM code which is the calculation result of the calculation unit 1021, and since it is a complementary type, / PWM is OFF when PWM is ON. If PWM is off, / PWM is on.
- the “On” section of the low-side FET (S ul ) is always on.
- V_HS represents the gate signal of the V-phase high-side FET (S vh )
- V_LS represents the gate signal of the V-phase low-side FET (S vl ).
- W_HS in FIG. 4L represents the gate signal of the W-phase high-side FET (S wh )
- W_LS represents the gate signal of the W-phase low-side FET (S wl ).
- the meaning of the symbols is the same as in FIG.
- the U-phase FETs (S uh and S ul ) perform PWM switching in phases 1 and 2, and the U-phase low-side FET (S ul ) is turned on in phases 4 and 5.
- the V-phase FETs (S vh and S vl ) perform PWM switching in phases 3 and 4, and the V-phase low-side FET (S vl ) is turned on in phases 6 and 1.
- the W-phase FETs (S wh and S wl ) perform PWM switching in phases 5 and 6, and the W-phase low-side FET (S wl ) is turned on in phases 2 and 3.
- the motor 105 can be driven with a desired torque.
- the calculation unit 1021 includes a regenerative brake target torque calculation unit 1201, a regenerative enablement unit 1202, a drive torque target calculation unit 1203, an assist enablement unit 1204, an addition unit 1206, a first duty ratio conversion unit 1211, A torque slew rate limiting unit 1212, a second duty ratio conversion unit 1213, a speed slew rate limiting unit 1215, an adding unit 1216, and a PWM code generating unit 1217 are included.
- the vehicle speed value from the vehicle speed input unit 1024 and the pedal torque value from the torque input unit 1027 are input to the drive torque target calculation unit 1203, and the assist torque value is calculated.
- the calculation contents of the drive torque target calculation unit 1203 will be described in detail below.
- the regenerative brake target torque calculation unit 1201 calculates a regenerative brake target torque value according to a preset curve, for example, according to the vehicle speed value from the vehicle speed input unit 1024.
- This curve is a curve that has a reverse polarity to the vehicle speed value and represents a relationship that is less than half of the absolute value of the vehicle speed value (“less than half” includes, for example, about several percent exceeding “half”). In this way, regeneration can be performed with a certain degree of efficiency at any speed. This process is not the main point of the present embodiment, and will not be described further.
- regenerative enabling unit 1202 when an input signal indicating that there is a brake is input from brake input unit 1028, regenerative enabling unit 1202 outputs the regenerative target torque value from regenerative brake target torque calculating unit 1201 to adding unit 1206. . Otherwise, 0 is output.
- the assist validation unit 1204 when an input signal indicating no brake is input from the brake input unit 1028, the assist validation unit 1204 outputs the assist torque value from the drive torque target calculation unit 1203. Otherwise, 0 is output.
- the addition unit 1206 inverts and outputs the polarity of the regeneration target torque value from the regeneration validation unit 1202 or outputs the assist torque value from the assist validation unit 1204 as it is.
- the assist torque value and the regeneration target torque value are abbreviated as a target torque value.
- the first duty ratio conversion unit 1211 calculates a torque duty code by multiplying the target torque value from the addition unit 1206 by a conversion coefficient d t and outputs the torque duty code to the torque slew rate limiting unit 1212.
- the torque slew rate limiting unit 1212 performs a well-known slew rate limiting process on the output from the first duty ratio conversion unit 1211 and outputs the processing result to the adding unit 1216.
- the second duty ratio conversion unit 1213 multiplies the vehicle speed value by a conversion coefficient d s to calculate a vehicle speed duty code, and outputs the vehicle speed duty code to the speed slew rate limiting unit 1215.
- Speed slew rate limiting unit 1215 performs well-known slew rate limiting processing on the output from second duty ratio conversion unit 1213 and outputs the processing result to addition unit 1216.
- the addition unit 1216 adds the torque duty code from the torque slew rate control unit 1212 and the vehicle speed duty code from the speed slew rate limiting unit 1215 to calculate a duty code, and outputs the duty code to the PWM code generation unit 1217.
- the PWM code generation unit 1217 multiplies the duty code by the battery voltage / reference voltage (for example, 24 V) from the AD input unit 1029 to generate a PWM code.
- the PWM code is output to the motor drive timing generation unit 1026.
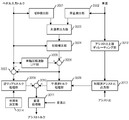
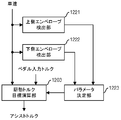
- the drive torque target calculation unit 1203 has a function as shown in FIG. That is, the drive torque target calculation unit 1203 includes a zero detection unit 3001, a stop detection unit 3002, a loss rate output unit 3003, an initial correction unit 3004, a wheel rotation interlocking LPF (Low Pass Filter) unit 3005, and an addition unit. 3006, addition unit 3007, reverse ripple torque processing unit 3008, smoothed torque processing unit 3009, addition unit 3010, shift processing unit 3011, assist ratio upper limit derating unit 3012, and limited assist ratio output unit 3013 and a smoothing rate determination unit 3014.
- a zero detection unit 3001 a stop detection unit 3002
- a loss rate output unit 3003 an initial correction unit 3004
- a wheel rotation interlocking LPF (Low Pass Filter) unit 3005 wheel rotation interlocking LPF (Low Pass Filter) unit 3005
- an addition unit 3006, addition unit 3007, reverse ripple torque processing unit 3008, smoothed torque processing unit 3009, addition unit 3010, shift processing unit 3011, assist
- the zero detection unit 3001 outputs a detection signal that is turned on when 0 appears in the pedal input torque value from the torque input unit 1027 to the missing rate output unit 3003, and outputs a detection signal that is turned off when other than 0 appears.
- the stop detection unit 3002 determines whether the electrically assisted bicycle 1 has stopped from the vehicle speed value from the vehicle speed input unit 1024, and outputs a stop signal to the loss rate output unit 3003 if it is determined that it has stopped.
- the defect rate output unit 3003 has a counter. When a detection signal that is ON is received from the zero detection unit 3001, the count value of the counter is increased by 1, and a detection signal that is OFF is received from the zero detection unit 3001. Then, the count value of the counter is decreased by 1. Furthermore, when the loss rate output unit 3003 receives a stop signal from the stop detection unit 3002, it loads “32” into the counter. Then, the loss rate is calculated by dividing the counter value by “32” and output to the initial correction unit 3004. Note that “32” is the number of samples corresponding to one cycle of pedal input torque (corresponding to half the pedal rotation), and may be another example.
- the initial correction unit 3004 calculates an initial correction torque value by multiplying the pedal input torque value by the deficiency rate from the deficiency rate output unit 3003, and outputs it to the addition unit 3006.
- the wheel rotation interlocking LPF unit 3005 performs a smoothing process on the pedal input torque value t 0 .
- a moving average or a weighted moving average of the pedal input torque in a variable period corresponding to one period of the pedal input torque having a variable period is adopted.
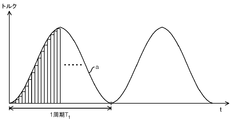
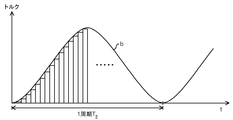
- the wheel rotation interlocking LPF unit 3005 for example, when the pedal input torque as shown in FIG. 7 by the curve a is input to stably, pedal input at one cycle T 1 of the this pedal input torque 32 equally divided timing A moving average or a weighted moving average is calculated for the torque value. Further, when the pedal input torque as shown by the curve b in FIG.
- the addition unit 3006 adds the initial correction value t 2 from the initial correction unit 3004 and the smoothed value t 1 from the wheel rotation interlocking LPF unit 3005, and outputs a corrected smoothed value t 3 . Further, the adding unit 3007 calculates a reverse ripple torque value t 4 by performing an operation of subtracting the pedal input torque value t 0 from the corrected smoothed value t 3 , and outputs it to the reverse ripple torque processing unit 3008.
- the reverse ripple torque processing unit 3008 calculates the adjusted reverse ripple torque value t 5 by multiplying the reverse ripple torque value t 4 by the smoothing rate ⁇ 1 output from the smoothing rate determining unit 3014.
- the smoothing rate ⁇ 1 can be set to a positive or negative value.
- the assist ratio upper limit derating unit 3012 performs a process for limiting the assist ratio according to the vehicle speed value. For example, (24 km / h-vehicle speed value) / 7 is calculated. Further, the limited assist ratio output unit 3013 outputs an output value from the assist ratio upper limit derating unit 3012 and an assist ratio (for example, a value from 0 to 2) set in advance or set from the operation panel 106 or the like. Compare and output the smaller value.
- the smoothed torque processing unit 3009 calculates the adjusted smoothed value t 6 by multiplying the corrected smoothed value t 3 from the adding unit 3006 by the output value ⁇ 2 from the limited assist ratio output unit 3013. To do.
- the adding unit 3010 adds the adjusted reverse ripple torque value t 5 from the reverse ripple torque processing unit 3008 and the adjusted smoothed value t 6 from the smoothed torque processing unit 3009 and outputs the result to the shift processing unit 3011. To do.
- the shift processing unit 3011 calculates the assist torque value by dividing the output t 7 of the adding unit 3010 by a preset gear ratio. If the current gear ratio can be acquired by a sensor or the like, the value may be used.
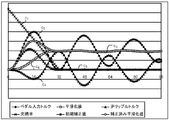
- the waveforms explaining the calculation contents of the drive torque target calculation unit 1203 are schematically shown in FIGS. 9 and 10.
- the horizontal axis in FIG. 9 represents time and the vertical axis torque value except for the linear c 1, the straight line c 1 represents the drop rate.
- the straight line c 1 represents the defect rate, which is initially 100%, and gradually decreases to 0% when the electrically assisted bicycle 1 starts running.
- the pedal input torque is represented by a curve c 2 and is a wavy curve.
- the initial correction unit 3004 multiplies the pedal input torque t 0 by the loss rate to calculate the initial correction value t 2 as shown by the curve c 3 . When the defect rate becomes 0%, the initial correction value t 2 also becomes 0, and this is shown.
- the smoothed value t 1 that is an output from the wheel rotation interlocking LPF unit 3005 is represented by a curve c 6 . Therefore, the corrected smoothed value t 3 is the smoothed value t 1 + the initial corrected value t 2 and becomes the curve c 5 .
- the reverse ripple torque value t 4 is the corrected smoothed value t 3 -the pedal input torque t 0 , and is represented by the curve c 4 . That is, the AC component of the reverse polarity of the pedal input torque is shown.
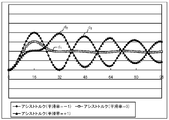
- the horizontal axis in FIG. 10 represents time, and the vertical axis in FIG. 10 represents torque value.
- the average assist power by the motor 105 is proportional to the average drive torque, that is, the average motor drive current regardless of the torque ripple while traveling at the same speed.
- the power consumption is proportional to the effective value of the current, and if there is a ripple, that is, an AC component, that amount is consumed by the motor coil resistance and the loss increases, but the assist power output is reduced to the machine output with zero subtraction. Does not contribute. Therefore, since the average efficiency is highest when the motor is driven so as to generate DC torque on average without generating ripple torque, it is efficient to drive the motor with the assist torque value as shown by the curve d 1. .
- the smoothing rate ⁇ 1 ⁇ 1
- the reverse ripple torque value t 4 is subtracted from the adjusted smoothed value t 6 , so that the original pedal input torque t 0 is represented by the curve d 3.
- the calculation described above is an example, and it is described above by providing a torque mixing unit that weights and adds the pedal input torque and the corrected smoothed value by an arbitrary coefficient (positive or negative). Similar results can be obtained.
- a flattened assist torque value as indicated by a curve d 1 in FIG. 10, because a pedaling force deficiency at the bottom dead center of the pedal is compensated for during normal driving, and motor peak power is also suppressed.
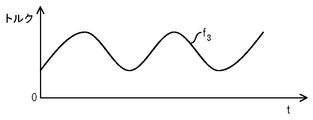
- the entire electrically assisted bicycle 1 has a torque output as shown in FIG. 12. . That is, a curve f 3 in which the pedal depression force curve is shifted upward by the assist torque value is obtained. In this way, the torque is equivalent to the point of strong craving, and the sensation that a person is scolding is maintained. Therefore, preferable assist is possible in terms of human sense and motor efficiency.
- an assist torque value as shown in FIG. 13, for example.
- an assist torque value g 2 like a curve d 2 in FIG. 10 is generated for the pedal depression force g 1 .
- a flat straight line g 3 becomes a torque output as the entire electrically assisted bicycle 1.
- the assist torque corresponding to the input pedal depression force is effectively allocated to the bottom dead center where the human power does not enter most, thereby obtaining a flat torque output as a whole. If it does so, even if it is in a state where it is likely to stop at the bottom dead center of the pedal when climbing uphill, it will be possible to travel smoothly with assistance.
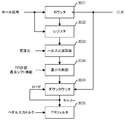
- the wheel rotation interlocking LPF unit 3005 includes a counter 3031, a register 3032, a pulse ratio calculator 3033, a down counter 3034, an FIR filter 3035, and a minimum determination unit 3036.
- the counter 3031 starts counting the clock CLK, counts the clock until the next rise, and outputs the count value to the register 3032.
- the register 3032 holds the count value output by the previous counter 3031.
- the register 3032 outputs the previous count value to the pulse ratio calculator 3033 at the rising edge of the Hall signal, for example, and stores the output value from the counter 3031.
- the pulse ratio calculator 3033 multiplies the counter value by 80 g / 64, and the minimum judgment unit 3036 receives the output from the pulse ratio calculator 3033 and the preset FIR filter 3035.
- the allowable longest shift cycle is compared, and the smaller one is output to the down counter 3034.
- the down counter 3034 counts down the cycle corresponding to the pedal pulse output from the pulse ratio calculator 3033 with a clock.
- the down counter 3034 finishes down-counting the cycle equivalent to the pedal pulse
- the down counter 3034 outputs the carry to the FIR filter 3035 as a pedal equivalent pulse.
- the carry output by the down counter 3034 is input to the down counter 3034 as a load, and therefore, a new pedal pulse equivalent period output by the pulse ratio calculator 3033 is taken in and the count down starts.
- the maximum allowable shift cycle of the FIR filter 3035 input to the minimum judging unit 3036 is set to a pedal pulse equivalent cycle corresponding to a significantly lower speed than the normal traveling speed, for example, 1 km / h.
- the minimum judgment unit 3036 selectively passes the output from the pulse ratio calculator 3033 as it is.
- a cycle corresponding to a pedal pulse corresponding to 1 km / h is selected and output, and a pedal equivalent pulse of 1 km / h or more is always output from the down counter 3034.
- the FIR filter 3035 is prevented from being held or causing an abnormally large delay even when the vehicle is stopped or near a stop.
- FIG. 16 shows a configuration example of the FIR filter 3035 according to this embodiment.
- the FIR filter 3035 shown in FIG. 16 for example, when a pedal input torque value sampled for each pedal equivalent pulse is sequentially input from the left side, a shift register 30351 that shifts to the right for each pedal equivalent pulse, and the tap coefficient value of each tap.
- the shift register 30351 shifts the value of each tap to the right for each pedal equivalent pulse and outputs the value of each tap to the multiplier 30352.
- Each multiplier 30352 multiplies a preset tap coefficient.
- the result is output to the adder 30353.
- Adder 30353 adds all the values of multiplier 30352 and outputs the result to multiplier 30354.
- the multiplication unit 30354 calculates the moving average by multiplying the addition result by 1/32. That is, the moving average for one cycle of the pedal input torque can be calculated according to the phase transition of the pedal input torque.
- FIG. 17 shows another configuration example of the FIR filter 3035 according to this embodiment.
- the FIR filter 3035 in FIG. 17 has a shift register 30355 that shifts to the right for each pedal equivalent pulse, and the tap coefficient value of each tap.
- a multiplication unit 30356 that performs multiplication, an addition unit 30357, and a multiplication unit 30358 for dividing by a sum ⁇ i n i (n i is each tap coefficient) of tap coefficients.
- the basic operation is the same as that shown in FIG. 16, but there is a portion where the tap coefficient is not “1”.
- the range (that is, the window) of the pedal input torque cut by the shift register 30355 is determined by the pedal equivalent pulse generated as described above, but may deviate from one cycle of the pedal input torque for some reason. is there. For this reason, on both sides of the window, tap coefficients having values smaller than those of other parts are set in order to reduce the influence of the shift.
- values such as 1/4, 2/4, and 3/4 are set from both ends of the window toward the center. This value can be set arbitrarily, and can be set to 1/5, 2/5, 3/5, 4/5. In this way, instead of changing the value of the tap coefficient linearly, a value along another curve (for example, a curve increasing in a saturated manner) may be adopted.
- the weighted moving average for one cycle of the pedal input torque can be calculated according to the phase transition of the pedal input torque.
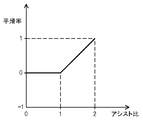
- the smoothing rate determination unit 3014 may set the smoothing rate described above according to the assist ratio set from the operation panel 106.
- the assist such as reverse phase pedal input torque is preferably . That is, it is preferable to increase the smoothing rate, that is, to approach +1 so that the total torque of the pedal depression force and the assist torque is flattened. Therefore, when the smoothing rate is changed according to the assist ratio, the smoothing rate may be set from the assist ratio according to a curve as shown in FIG. 18 or 19, for example. In the example of FIGS.
- the horizontal axis represents the assist ratio
- the vertical axis represents the smoothing rate.
- the smoothing rate remains 0 for the assist ratio from 0 to 1, and the assist torque is kept flat.
- the smoothing rate is linearly increased from 0 to 1 until the assist ratio becomes 2. Accordingly, when a lot of assist is required, the smoothing rate is changed so that the total torque of the pedal depression force and the assist torque is flattened.
- FIG. 19 shows an example in which the smoothing rate increases linearly from 0 to 1 as the assist ratio increases, and the total torque of the pedal depression force and the assist torque is gradually increased according to the necessity of the assist. Is flattened.
- the smoothing rate may be increased in a non-linear manner as the assist ratio increases.
- FIG. 20 shows a configuration example for determining the assist ratio and the smoothing rate according to the vehicle speed as a configuration example for determining the assist torque value according to the vehicle speed.
- an upper envelope detection unit 1221, a lower envelope detection unit 1222, and a parameter determination unit 1223 are added to the functional block diagram shown in FIG.
- Upper envelope detection section 1221 detects an upper envelope of the vehicle speed having ripples, and outputs a vehicle speed value corresponding to the upper envelope to parameter determination section 1223.
- Lower envelope detection section 1222 detects the lower envelope of the vehicle speed having ripples, and outputs a vehicle speed value corresponding to the lower envelope to parameter determination section 1223.
- the parameter determination unit 1223 determines, for example, the assist ratio and the smoothing rate by the process described below, and outputs the determined assist ratio and the smoothing rate to the drive torque target calculation unit 1203.
- the drive torque target calculation unit 1203 calculates an assist torque value using the output value from the parameter determination unit 1223 as the assist ratio and the smoothing rate in the functional block diagram shown in FIG. That is, in this case, the smoothing rate determining unit 3014 is not used.
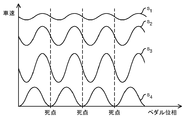
- FIG. 21 is a diagram showing the relationship between the vehicle speed (also called instantaneous vehicle speed) and the pedal phase. As shown by the curve s 4 , the phase transition of the pedal input torque is compared as being substantially constant in each case described below, but generally, the cycle of the pedal input torque becomes longer when climbing uphill. .
- the vehicle speed is high and the ripple is small.
- the vehicle speed is lower than when traveling on flat ground, and the ripple becomes a large curve. Furthermore, when climbing up a steep slope, the vehicle speed further decreases and the ripple increases.
- the running state since the running state appears in the vehicle speed change, the running state can be estimated by appropriately extracting the vehicle speed change. Therefore, the assist ratio and the smoothing rate can be set according to the running state.
- the lower envelope (also referred to as a low-speed envelope) of the vehicle speed waveform is detected and adopted as a feature of the vehicle speed change. It is also possible to do. Since the lower envelope is specified at the time of rowing, even if only the lower envelope is detected, it is possible to cope with it.
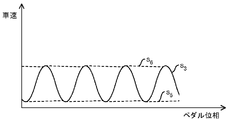
- the lower envelope is an envelope connecting the minimum points of the vehicle speed ripple, as indicated by a dotted line s 5 in FIG. 22, and can be detected by a known method.
- the lower envelope s 5 of the envelope connecting the minimum points of the vehicle speed ripple and the upper envelope s 6 of the envelope connecting the maximum points of the vehicle speed ripple are detected, For example, it can be adopted as a feature of the vehicle speed change by the ratio calculated by the lower envelope value / upper envelope value.
- the parameter determination unit 1223 calculates the smoothing rate and assist ratio corresponding to the lower envelope value, for example, according to a curve as shown in FIG. Note that only the smoothing rate or the assist ratio may be employed. That is, only the assist ratio may be adopted. When only the assist ratio is employed, for example, a smoothing rate corresponding to the assist ratio may be employed with a curve as shown in FIGS. 18 and 19. Further, the assist ratio may be determined by another method and only the smoothing rate may be adopted.
- the horizontal axis represents the lower envelope value
- the vertical axis represents the assist ratio or the smoothing rate.
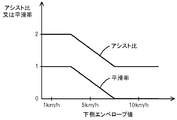
- the smoothing rate and the assist ratio are increased more than at a high speed, and when the lower envelope value is increased, the smoothing rate and the assist ratio are gradually decreased to a certain extent (in the example of FIG. 24, about 7.5 km). / H) As the lower envelope value increases, it becomes a constant value.
- the assist torque is increased during climbing, and the assist torque is constant during traveling on flat ground so that the total torque of the pedal depression force and the assist torque is horizontal as shown in FIG. So that it will drive.
- the parameter determining unit 1223 calculates the smoothing rate and the assist ratio according to a curve as shown in FIG. 25, for example.
- the horizontal axis represents the value of the lower envelope / upper envelope
- the vertical axis represents the smoothing rate or the assist ratio.
- a large assist is preferable when the lower envelope / upper envelope is a small value, and the assist can be lowered as it approaches 1, so the lower envelope / upper envelope Until the value reaches a certain value (for example, about 0.6), “2” is set for the assist ratio and “1” is set for the smoothing rate.
- the assist ratio and the smoothing rate are gradually lowered, and when reaching, for example, about 0.9, the assist ratio and the smoothing rate become constant values again.
- Such a curve is an example, and other curves may be adopted.
- FIG. 26 shows a functional block diagram of the calculation unit 1021 in such a case.
- the calculation unit 1021 includes a regenerative brake target torque calculation unit 11201, a regeneration validation unit 11202, a drive torque target calculation unit 11203, an assist validation unit 11204, an addition unit 11206, and a torque slew rate. It has a limiting unit 11255, an equivalent torque converting unit 11251, an adding unit 11252, a loop filter unit 11253, and a PWM code generating unit 11254.
- the vehicle speed value from the vehicle speed input unit 1024 and the pedal torque value from the torque input unit 1027 are input to the drive torque target calculation unit 11203, and the assist torque value is calculated.
- the calculation content of the drive torque target calculation unit 11203 is the same as that of the drive torque target calculation unit 1203.
- the regenerative brake target torque calculation unit 11201 calculates a regenerative brake target torque value according to a preset curve, for example, according to the vehicle speed value from the vehicle speed input unit 1024.
- This curve is a curve that has a reverse polarity to the vehicle speed value and represents a relationship that is less than half of the absolute value of the vehicle speed value (“less than half” includes, for example, about several percent exceeding “half”). In this way, regeneration can be performed with a certain degree of efficiency at any speed. This process is not the main point of the present embodiment, and will not be described further.
- regenerative enabling unit 11202 when an input signal indicating that there is a brake is input from brake input unit 1028, regenerative enabling unit 11202 outputs the regenerative target torque value from regenerative brake target torque calculating unit 11201 to addition unit 11206. . Otherwise, 0 is output.
- the assist validation unit 11204 when an input signal indicating no brake is input from the brake input unit 1028, the assist validation unit 11204 outputs the assist torque value from the drive torque target calculation unit 11203. Otherwise, 0 is output.
- the adding unit 11206 inverts the polarity of the regeneration target torque value from the regeneration validation unit 11202 and outputs it, or outputs the assist torque value from the assist validation unit 11204 as it is.
- the assist torque value and the regeneration target torque value are abbreviated as a target torque value.
- the torque slew rate limiting unit 11255 performs a well-known slew rate limiting process on the target torque value from the adding unit 11206 and outputs the processing result to the adding unit 11252.
- the equivalent torque conversion unit 11251 performs a process of converting a value corresponding to the motor current from the current detection unit 1023 into a torque equivalent value, and outputs the processing result to the addition unit 11252.
- the adding unit 11252 subtracts the output from the equivalent torque converting unit 11251 from the output from the torque slew rate limiting unit 11255, and outputs the calculation result to the loop filter unit 11253.
- the loop filter unit 11253 performs integration processing on the output from the addition unit 11252 and outputs the processing result to the PWM code generation unit 11254.
- the PWM code generation unit 11254 multiplies the output from the loop filter unit 11253 by the battery voltage / reference voltage (for example, 24 V) from the AD input unit 1029 to generate a PWM code.
- the PWM code is output to the motor drive timing generation unit 1026.
- the present invention is not limited to this.
- the functional block diagram described above is divided into functional blocks for convenience of explanation, and the actual circuit configuration may be different, and even when implemented by a program, it may not match the program module configuration.
- a part of the arithmetic unit 1021 may be realized by a dedicated circuit, or the function as described above may be realized by the microprocessor executing a program.
- the pedal input torque may be multiplied by the function f (x) of the missing rate x. is there.
- the output of the wheel rotation interlocking LPF unit 3005 can be modified by multiplying the function g (x) of the defect rate x.
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Control Of Electric Motors In General (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Abstract
Description
補正済み平滑化値t3=平滑化値t1+初期補正値t2
逆リップルトルク値t4=補正済み平滑化値t3-ペダル入力トルクt0
調整済み逆リップルトルク値t5=逆リップルトルク値t4×α1
調整済み平滑化値t6=補正済み平滑化値t3×α2
t7=t5+t6
上では、駆動トルク目標演算部1203を、フィードフォワード制御に適用した例を示したが、フィードバック制御においても、本駆動トルク目標演算部1203を用いることができる。このような場合における演算部1021の機能ブロック図を図26に示す。
Claims (16)
- ペダル入力トルクの、複数時点における値を用いて平滑化処理を実施して第1平滑化トルク値を算出する平滑化処理部と、
前記複数時点のうち前記ペダル入力トルクの入力が不足している時点の割合を求める欠損率出力部と、
前記ペダル入力トルクと、前記平滑化処理部により算出された前記第1平滑化トルク値とを、前記欠損率出力部の出力に応じて混合する演算処理を実施してアシストトルクを算出するアシストトルク算出部と、
前記アシストトルク算出部により算出された前記アシストトルクを用いてモータを駆動するための処理を実施する駆動処理部と、
を有するモータ駆動制御装置。 - 前記平滑化処理部が、
可変周期の前記ペダル入力トルクの1周期に相当する可変期間内の前記複数時点における前記ペダル入力トルクの値の移動平均又は加重移動平均を前記第1平滑化トルク値として算出するフィルタ
を含む請求項1記載のモータ駆動制御装置。 - 前記フィルタが、FIR(Finite Impulse Response)フィルタであって、
前記可変期間の両端部分に対応する、前記FIRフィルタのタップ係数の値が、前記可変期間の他の部分に対応するタップ係数の値へ滑らかに変化するように設定されている
請求項2記載のモータ駆動制御装置。 - 前記アシストトルク算出部が、
前記第1平滑化トルク値と前記補正値との加算結果である第2平滑化トルク値と前記ペダル入力トルクの値とを正又は負の任意の係数値で重み付け加算するトルク混合部
をさらに有する請求項1乃至3のいずれか1つ記載のモータ駆動制御装置。 - 前記アシストトルク算出部が、
前記第1平滑化トルク値と前記補正値との加算結果である第2平滑化トルク値から前記ペダル入力トルクの値を減算して逆リップルトルクを算出し、前記逆リップルトルクに正又は負の任意の平滑係数値を乗じた上で前記第2平滑化トルク値を加算するトルク混合部
をさらに有する請求項1乃至3のいずれか1つ記載のモータ駆動制御装置。 - 設定されるアシスト比が上昇するに連動して前記平滑係数値が大きくなるように設定されている
請求項5記載のモータ駆動制御装置。 - 可変周期のトルク要求の1周期に相当する期間における前記トルク要求の移動平均又は加重移動平均を算出する平滑化処理部と、
前記平滑化処理部の処理結果と前記トルク要求とを用いた演算処理を実施して前記トルク要求に対応する目標トルクを算出する算出部と、
前記算出部により算出された目標トルクを用いてモータを駆動するための処理を実施する駆動処理部と、
を有するモータ駆動制御装置。 - 前記平滑化処理部が、FIRフィルタであり、
前記期間の両端部分に対応する、前記FIRフィルタのタップ係数の値が、前記期間の他の部分に対応するタップ係数の値へ滑らかに増加するように設定されている
請求項7記載のモータ駆動制御装置。 - 前記平滑化処理部が、FIRフィルタであり、
前記算出部が、
前記FIRフィルタに入力された前記トルク要求の値が0となっている割合を算出する欠損割合算出部と、
前記FIRフィルタの出力と、前記トルク要求の値とを、前記割合に応じて混合して平滑化トルク値を算出する平滑化トルク値算出部と、
を有する請求項7記載のモータ駆動制御装置。 - 前記算出部が、
前記平滑化処理部の処理結果と前記トルク要求の値とを正又は負の任意の係数値で重み付け加算するトルク混合部
を有する請求項7記載のモータ駆動制御装置。 - 前記算出部が、
前記平滑化処理部の処理結果から前記トルク要求の値を減算して逆リップルトルクを算出し、前記逆リップルトルクに正又は負の任意の平滑係数値を乗じた上で前記平滑化処理部の処理結果又は前記平滑化処理部の処理結果の所定数倍された値を加算するトルク混合部
を有する請求項7記載のモータ駆動制御装置。 - 時間変化する車速の下側エンベロープを検出する検出部と、
前記検出部によって検出された前記下側エンベロープの値に応じて、前記係数値を決定する決定部と、
をさらに有する請求項10記載のモータ駆動制御装置。 - 時間変化する車速の下側エンベロープ及び上側エンベロープを検出する検出部と、
前記検出部によって検出された前記下側エンベロープの値及び前記上側エンベロープの値に応じて、前記係数値を決定する決定部と、
をさらに有する請求項10記載のモータ駆動制御装置。 - 時間変化する車速の下側エンベロープを検出する検出部と、
前記検出部によって検出された前記下側エンベロープの値に応じて、前記平滑係数値と前記所定数の少なくともいずれかを検定する決定部と、
をさらに有する請求項11記載のモータ駆動制御装置。 - 時間変化する車速の下側エンベロープ及び上側エンベロープを検出する検出部と、
前記検出部によって検出された前記下側エンベロープの値及び前記上側エンベロープの値に応じて、前記平滑係数値と前記所定数の少なくともいずれかを決定する決定部と、
をさらに有する請求項11記載のモータ駆動制御装置。 - 前記平滑化処理部が、
前記モータの回転に応じて生成されるパルス信号に応じて前記トルク要求のサンプリングタイミングを変化させる
請求項7乃至15のいずれか1つ記載のモータ駆動制御装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP11851554.3A EP2657118B1 (en) | 2010-12-22 | 2011-12-13 | Motor drive control device |
| US13/995,769 US9120531B2 (en) | 2010-12-22 | 2011-12-13 | Motor driving control apparatus |
| JP2012549735A JP5586709B2 (ja) | 2010-12-22 | 2011-12-13 | モータ駆動制御装置 |
| CN201180061410.1A CN103429490B (zh) | 2010-12-22 | 2011-12-13 | 电动机驱动控制装置 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010285549 | 2010-12-22 | ||
| JP2010-285549 | 2010-12-22 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2012086458A1 true WO2012086458A1 (ja) | 2012-06-28 |
Family
ID=46313737
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2011/078760 WO2012086458A1 (ja) | 2010-12-22 | 2011-12-13 | モータ駆動制御装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9120531B2 (ja) |
| EP (1) | EP2657118B1 (ja) |
| JP (3) | JP5586709B2 (ja) |
| CN (2) | CN107253507B (ja) |
| TW (1) | TWI650268B (ja) |
| WO (1) | WO2012086458A1 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2706005A1 (en) | 2012-09-05 | 2014-03-12 | Taiyo Yuden Co., Ltd. | Motor drive controller and power-assisted vehicle |
| EP2783970A1 (en) * | 2013-03-29 | 2014-10-01 | Yamaha Hatsudoki Kabushiki Kaisha | Controller for electric bicycle, power unit for electric bicycle, and electric bicycle |
| WO2014200081A1 (ja) | 2013-06-14 | 2014-12-18 | マイクロスペース株式会社 | モータ駆動制御装置 |
| JP2015182600A (ja) * | 2014-03-24 | 2015-10-22 | ブリヂストンサイクル株式会社 | 電動アシスト自転車 |
| JP2017100540A (ja) * | 2015-12-01 | 2017-06-08 | ヤマハ発動機株式会社 | 電動補助自転車 |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5575938B1 (ja) * | 2013-02-07 | 2014-08-20 | 株式会社シマノ | 自転車用制御装置 |
| WO2016023220A1 (en) * | 2014-08-15 | 2016-02-18 | Cheevc Ltd | Power vector sensor device and bicycle having the same |
| TWI619638B (zh) * | 2014-08-20 | 2018-04-01 | 太陽誘電股份有限公司 | Motor drive control device and electric auxiliary vehicle |
| US10384742B2 (en) | 2014-11-18 | 2019-08-20 | Zehus S.P.A. | System for controlling the motion of an impulsive-type human powered vehicle |
| JP6427433B2 (ja) | 2015-02-03 | 2018-11-21 | マイクロスペース株式会社 | モータ駆動装置 |
| US9896152B2 (en) * | 2015-05-25 | 2018-02-20 | Shimano Inc. | Bicycle transmission system |
| US9637197B2 (en) * | 2015-07-01 | 2017-05-02 | GM Global Technology Operations LLC | Dynamic inertia compensation and pedal effort transformation for electric bike |
| CN106515985A (zh) * | 2016-11-18 | 2017-03-22 | 海贝(天津)科技有限责任公司 | 电动助力自行车电机控制器倾角传感调速方法 |
| US10710675B2 (en) * | 2017-06-21 | 2020-07-14 | Chanmin Park | Electric bike |
| TWI651237B (zh) * | 2017-11-13 | 2019-02-21 | 財團法人金屬工業研究發展中心 | 電助自行車及其輔助動力的控制方法 |
| US10322770B1 (en) | 2017-11-27 | 2019-06-18 | Metal Industries Research & Development Centre | Electricity aided bicycle and auxiliary power controlling method thereof |
| JP7125889B2 (ja) * | 2018-04-27 | 2022-08-25 | 株式会社シマノ | 人力駆動車用制御装置 |
| WO2020059111A1 (ja) * | 2018-09-21 | 2020-03-26 | 新電元工業株式会社 | 車両用モータ駆動制御装置、及び、車両用モータ駆動制御装置の制御方法 |
| JP6752871B2 (ja) * | 2018-12-25 | 2020-09-09 | キヤノン株式会社 | モータ制御装置、シート搬送装置、原稿給送装置、原稿読取装置及び画像形成装置 |
| US20210086769A1 (en) * | 2019-09-20 | 2021-03-25 | Lyft, Inc. | Environmental torque profile adaptation |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0858668A (ja) * | 1994-08-18 | 1996-03-05 | Honda Motor Co Ltd | 電動補助自転車 |
| JPH0880891A (ja) * | 1994-09-13 | 1996-03-26 | Yamaha Motor Co Ltd | 補助動力付き人力車両 |
| JPH08295285A (ja) | 1995-04-28 | 1996-11-12 | Yamaha Motor Co Ltd | パワーアシスト車両の駆動装置 |
| JPH1059260A (ja) * | 1996-08-20 | 1998-03-03 | Sanyo Electric Co Ltd | 電動車用モータのトルク制限装置 |
| JPH10114292A (ja) * | 1996-10-11 | 1998-05-06 | Tec Corp | 電動補助動力装置付自転車 |
| JP3301811B2 (ja) | 1993-03-05 | 2002-07-15 | 株式会社モリック | 電動モータ付き自転車 |
| JP3955152B2 (ja) | 1998-06-08 | 2007-08-08 | 松下電器産業株式会社 | 補助動力装置付き車輌及びその制御装置 |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63314018A (ja) | 1987-06-17 | 1988-12-22 | Matsushita Electric Ind Co Ltd | Pwm信号出力回路 |
| JP2634121B2 (ja) * | 1992-03-06 | 1997-07-23 | ヤマハ発動機株式会社 | 電動モータ付き自転車およびそのモータ制御方法 |
| WO1996032314A1 (en) * | 1995-04-11 | 1996-10-17 | Aerovironment Inc. | Electric power apparatus for a wheeled vehicle |
| US5662187A (en) * | 1995-07-27 | 1997-09-02 | Mc Govern; James Robert | Electrically assisted pedalled bicycle |
| US5937962A (en) * | 1995-08-08 | 1999-08-17 | Yamaha Hatsudoki Kabushiki Kaisha | Bicycle with assist engine |
| JP3709583B2 (ja) | 1995-08-22 | 2005-10-26 | 株式会社デンソー | 内燃機関のスロットル制御装置 |
| JPH1059262A (ja) | 1996-08-20 | 1998-03-03 | Sanyo Electric Co Ltd | 電気自転車用モータの出力制御方式 |
| JPH1179062A (ja) | 1997-08-29 | 1999-03-23 | Toshiba Tec Kk | 電動補助動力装置付自転車 |
| US5922035A (en) * | 1997-12-03 | 1999-07-13 | Winston Hsu | Fuzzy logic control system for electrical aided vehicle |
| JPH11227438A (ja) | 1998-02-16 | 1999-08-24 | Calsonic Corp | 車両空調システムのファンモータ駆動制御装置 |
| JP2000118479A (ja) | 1998-10-12 | 2000-04-25 | Sony Corp | 助力機能付き自転車 |
| IT1310144B1 (it) * | 1999-08-24 | 2002-02-11 | Ferrero Spa | Sistema e procedimento per il controllo di trasmissioni a rapportovariabile |
| JP2002019624A (ja) * | 2000-07-06 | 2002-01-23 | Koyo Seiko Co Ltd | 電動パワーステアリング装置 |
| FR2811824B1 (fr) | 2000-07-17 | 2002-10-18 | Sagem | Moteur electrique a deux modes de communication d'alimentation |
| JP2003104274A (ja) * | 2001-09-27 | 2003-04-09 | Honda Motor Co Ltd | 電動補助自転車 |
| JP4184026B2 (ja) * | 2002-10-03 | 2008-11-19 | 三菱電機株式会社 | ピーク抑圧装置および送信装置 |
| JP2004322809A (ja) * | 2003-04-24 | 2004-11-18 | Sony Corp | 電動アシスト自転車 |
| JP4350531B2 (ja) * | 2004-01-08 | 2009-10-21 | 本田技研工業株式会社 | 電動車両 |
| JP5050387B2 (ja) | 2006-04-03 | 2012-10-17 | 日産自動車株式会社 | モーター制御装置 |
| WO2007120819A2 (en) * | 2006-04-15 | 2007-10-25 | The Board Of Regents Of The Leland Stanford Junior University | Systems and methods for estimating surface electromyography |
| JP5317422B2 (ja) | 2007-03-20 | 2013-10-16 | 株式会社ミツバ | モータの制御装置及びモータの制御方法並びに電動車両 |
| CN201113914Y (zh) * | 2007-09-03 | 2008-09-10 | 崔伟斌 | 电动自行车用低压交流电动机驱动和控制装置 |
| JP5035641B2 (ja) | 2009-11-30 | 2012-09-26 | アイシン・エィ・ダブリュ株式会社 | 電動機駆動装置の制御装置 |
-
2011
- 2011-12-13 WO PCT/JP2011/078760 patent/WO2012086458A1/ja active Application Filing
- 2011-12-13 JP JP2012549735A patent/JP5586709B2/ja active Active
- 2011-12-13 EP EP11851554.3A patent/EP2657118B1/en active Active
- 2011-12-13 US US13/995,769 patent/US9120531B2/en active Active
- 2011-12-13 CN CN201710402901.7A patent/CN107253507B/zh active Active
- 2011-12-13 CN CN201180061410.1A patent/CN103429490B/zh active Active
- 2011-12-22 TW TW100148106A patent/TWI650268B/zh active
-
2014
- 2014-06-09 JP JP2014118326A patent/JP5977782B2/ja not_active Expired - Fee Related
-
2016
- 2016-02-04 JP JP2016019665A patent/JP6178440B2/ja active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3301811B2 (ja) | 1993-03-05 | 2002-07-15 | 株式会社モリック | 電動モータ付き自転車 |
| JPH0858668A (ja) * | 1994-08-18 | 1996-03-05 | Honda Motor Co Ltd | 電動補助自転車 |
| JPH0880891A (ja) * | 1994-09-13 | 1996-03-26 | Yamaha Motor Co Ltd | 補助動力付き人力車両 |
| JPH08295285A (ja) | 1995-04-28 | 1996-11-12 | Yamaha Motor Co Ltd | パワーアシスト車両の駆動装置 |
| JPH1059260A (ja) * | 1996-08-20 | 1998-03-03 | Sanyo Electric Co Ltd | 電動車用モータのトルク制限装置 |
| JPH10114292A (ja) * | 1996-10-11 | 1998-05-06 | Tec Corp | 電動補助動力装置付自転車 |
| JP3955152B2 (ja) | 1998-06-08 | 2007-08-08 | 松下電器産業株式会社 | 補助動力装置付き車輌及びその制御装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2657118A4 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2706005A1 (en) | 2012-09-05 | 2014-03-12 | Taiyo Yuden Co., Ltd. | Motor drive controller and power-assisted vehicle |
| EP2783970A1 (en) * | 2013-03-29 | 2014-10-01 | Yamaha Hatsudoki Kabushiki Kaisha | Controller for electric bicycle, power unit for electric bicycle, and electric bicycle |
| WO2014200081A1 (ja) | 2013-06-14 | 2014-12-18 | マイクロスペース株式会社 | モータ駆動制御装置 |
| US9896153B2 (en) | 2013-06-14 | 2018-02-20 | Microspace Corporation | Motor driving control apparatus |
| US10040508B2 (en) | 2013-06-14 | 2018-08-07 | Microspace Corporation | Motor driving control apparatus |
| JP2015182600A (ja) * | 2014-03-24 | 2015-10-22 | ブリヂストンサイクル株式会社 | 電動アシスト自転車 |
| JP2017100540A (ja) * | 2015-12-01 | 2017-06-08 | ヤマハ発動機株式会社 | 電動補助自転車 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107253507A (zh) | 2017-10-17 |
| JP2014159283A (ja) | 2014-09-04 |
| CN103429490B (zh) | 2017-06-27 |
| JP6178440B2 (ja) | 2017-08-09 |
| JP5977782B2 (ja) | 2016-08-24 |
| TWI650268B (zh) | 2019-02-11 |
| JPWO2012086458A1 (ja) | 2014-05-22 |
| CN103429490A (zh) | 2013-12-04 |
| CN107253507B (zh) | 2020-06-23 |
| US20140039741A1 (en) | 2014-02-06 |
| EP2657118A4 (en) | 2014-05-07 |
| TW201231348A (en) | 2012-08-01 |
| US9120531B2 (en) | 2015-09-01 |
| EP2657118A1 (en) | 2013-10-30 |
| JP5586709B2 (ja) | 2014-09-10 |
| JP2016064833A (ja) | 2016-04-28 |
| EP2657118B1 (en) | 2021-03-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6178440B2 (ja) | モータ駆動制御装置 | |
| JP5689849B2 (ja) | モータ駆動制御装置 | |
| JP6619836B2 (ja) | モータ駆動制御装置 | |
| EP2658114B1 (en) | Motor drive control device | |
| JP5602186B2 (ja) | モータ駆動制御装置 | |
| US8725340B1 (en) | Motor drive controller and electric power-assisted vehicle | |
| JP2021168592A (ja) | モータ駆動制御装置及び電動装置 | |
| TWI519433B (zh) | 馬達驅動控制裝置 | |
| JP5965517B2 (ja) | モータ制御装置及び制御装置 | |
| JP5785527B2 (ja) | モータ駆動制御装置及び電動アシスト車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 11851554 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2012549735 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2011851554 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 13995769 Country of ref document: US |