JP5586709B2 - モータ駆動制御装置 - Google Patents
モータ駆動制御装置 Download PDFInfo
- Publication number
- JP5586709B2 JP5586709B2 JP2012549735A JP2012549735A JP5586709B2 JP 5586709 B2 JP5586709 B2 JP 5586709B2 JP 2012549735 A JP2012549735 A JP 2012549735A JP 2012549735 A JP2012549735 A JP 2012549735A JP 5586709 B2 JP5586709 B2 JP 5586709B2
- Authority
- JP
- Japan
- Prior art keywords
- torque
- value
- unit
- smoothing
- assist
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000009499 grossing Methods 0.000 claims description 94
- 238000004364 calculation method Methods 0.000 claims description 70
- 238000012545 processing Methods 0.000 claims description 47
- 230000002441 reversible effect Effects 0.000 claims description 26
- 238000000034 method Methods 0.000 claims description 24
- 230000008569 process Effects 0.000 claims description 12
- 230000007812 deficiency Effects 0.000 claims description 5
- 230000004044 response Effects 0.000 claims description 4
- 238000005070 sampling Methods 0.000 claims description 3
- 238000001514 detection method Methods 0.000 description 34
- 238000010586 diagram Methods 0.000 description 32
- 238000012937 correction Methods 0.000 description 14
- 230000001172 regenerating effect Effects 0.000 description 13
- 238000006243 chemical reaction Methods 0.000 description 9
- 230000009194 climbing Effects 0.000 description 9
- 230000008929 regeneration Effects 0.000 description 8
- 238000011069 regeneration method Methods 0.000 description 8
- 230000008859 change Effects 0.000 description 7
- 230000006870 function Effects 0.000 description 6
- 230000007704 transition Effects 0.000 description 5
- 235000014676 Phragmites communis Nutrition 0.000 description 4
- 230000007547 defect Effects 0.000 description 4
- 238000010200 validation analysis Methods 0.000 description 4
- 230000000630 rising effect Effects 0.000 description 3
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 230000000295 complement effect Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 229910001416 lithium ion Inorganic materials 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 238000009789 rate limiting process Methods 0.000 description 2
- 241000282412 Homo Species 0.000 description 1
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 1
- 238000000418 atomic force spectrum Methods 0.000 description 1
- 230000033228 biological regulation Effects 0.000 description 1
- 235000019788 craving Nutrition 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005669 field effect Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 229910000652 nickel hydride Inorganic materials 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 229920006395 saturated elastomer Polymers 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000035807 sensation Effects 0.000 description 1
- 230000001502 supplementing effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
Images

























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M6/00—Rider propulsion of wheeled vehicles with additional source of power, e.g. combustion engine or electric motor
- B62M6/40—Rider propelled cycles with auxiliary electric motor
- B62M6/45—Control or actuating devices therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/20—Electric propulsion with power supplied within the vehicle using propulsion power generated by humans or animals
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M6/00—Rider propulsion of wheeled vehicles with additional source of power, e.g. combustion engine or electric motor
- B62M6/40—Rider propelled cycles with auxiliary electric motor
- B62M6/45—Control or actuating devices therefor
- B62M6/50—Control or actuating devices therefor characterised by detectors or sensors, or arrangement thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/24—Personal mobility vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/46—Vehicles with auxiliary ad-on propulsions, e.g. add-on electric motor kits for bicycles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Description
補正済み平滑化値t3=平滑化値t1+初期補正値t2
逆リップルトルク値t4=補正済み平滑化値t3−ペダル入力トルクt0
調整済み逆リップルトルク値t5=逆リップルトルク値t4×α1
調整済み平滑化値t6=補正済み平滑化値t3×α2
t7=t5+t6
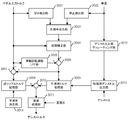
上では、駆動トルク目標演算部1203を、フィードフォワード制御に適用した例を示したが、フィードバック制御においても、本駆動トルク目標演算部1203を用いることができる。このような場合における演算部1021の機能ブロック図を図26に示す。
Claims (7)
- ペダル入力トルクの、複数時点における値を用いて平滑化処理を実施して第1平滑化トルク値を算出する平滑化処理部と、
前記複数時点のうち前記ペダル入力トルクの値がゼロである時点の割合を求める欠損率出力部と、
前記ペダル入力トルクと、前記平滑化処理部により算出された前記第1平滑化トルク値とを、前記欠損率出力部の出力に応じて混合する演算処理を実施してアシストトルクを算出するアシストトルク算出部と、
前記アシストトルク算出部により算出された前記アシストトルクを用いてモータを駆動するための処理を実施する駆動処理部と、
を有するモータ駆動制御装置。 - 前記平滑化処理部が、
前記ペダル入力トルクの1周期に相当する期間内の前記ペダル入力トルクの値の移動平均又は加重移動平均を前記第1平滑化トルク値として算出するフィルタ
を含む請求項1記載のモータ駆動制御装置。 - 前記フィルタが、FIR(Finite Impulse Response)フィルタであって、
前記期間の両端部分に対応する、前記FIRフィルタのタップ係数の値が、前記期間の他の部分に対応するタップ係数の値へ滑らかに変化するように設定されている
請求項2記載のモータ駆動制御装置。 - 前記アシストトルク算出部が、
前記第1平滑化トルク値と前記ペダル入力トルクに前記欠損率出力部における割合を乗じた値との加算結果である第2平滑化トルク値と前記ペダル入力トルクの値とを正又は負の任意の係数値で重み付け加算するトルク混合部
をさらに有する請求項1乃至3のいずれか1つ記載のモータ駆動制御装置。 - 前記アシストトルク算出部が、
前記第1平滑化トルク値と前記ペダル入力トルクに前記欠損率出力部における割合を乗じた値との加算結果である第2平滑化トルク値から前記ペダル入力トルクの値を減算して逆リップルトルクを算出し、前記逆リップルトルクに正又は負の任意の平滑係数値を乗じた上で前記第2平滑化トルク値を加算するトルク混合部
をさらに有する請求項1乃至3のいずれか1つ記載のモータ駆動制御装置。 - 設定されるアシスト比が上昇するに連動して前記平滑係数値が大きくなるように設定されている
請求項5記載のモータ駆動制御装置。 - 前記平滑化処理部が、
車速に応じて前記ペダル入力トルクのサンプリングタイミングを変化させる
請求項1乃至6のいずれか1つ記載のモータ駆動制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012549735A JP5586709B2 (ja) | 2010-12-22 | 2011-12-13 | モータ駆動制御装置 |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010285549 | 2010-12-22 | ||
| JP2010285549 | 2010-12-22 | ||
| JP2012549735A JP5586709B2 (ja) | 2010-12-22 | 2011-12-13 | モータ駆動制御装置 |
| PCT/JP2011/078760 WO2012086458A1 (ja) | 2010-12-22 | 2011-12-13 | モータ駆動制御装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014118326A Division JP5977782B2 (ja) | 2010-12-22 | 2014-06-09 | モータ駆動制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2012086458A1 JPWO2012086458A1 (ja) | 2014-05-22 |
| JP5586709B2 true JP5586709B2 (ja) | 2014-09-10 |
Family
ID=46313737
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012549735A Active JP5586709B2 (ja) | 2010-12-22 | 2011-12-13 | モータ駆動制御装置 |
| JP2014118326A Active JP5977782B2 (ja) | 2010-12-22 | 2014-06-09 | モータ駆動制御装置 |
| JP2016019665A Active JP6178440B2 (ja) | 2010-12-22 | 2016-02-04 | モータ駆動制御装置 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014118326A Active JP5977782B2 (ja) | 2010-12-22 | 2014-06-09 | モータ駆動制御装置 |
| JP2016019665A Active JP6178440B2 (ja) | 2010-12-22 | 2016-02-04 | モータ駆動制御装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9120531B2 (ja) |
| EP (1) | EP2657118B1 (ja) |
| JP (3) | JP5586709B2 (ja) |
| CN (2) | CN103429490B (ja) |
| TW (1) | TWI650268B (ja) |
| WO (1) | WO2012086458A1 (ja) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5785527B2 (ja) | 2012-09-05 | 2015-09-30 | 太陽誘電株式会社 | モータ駆動制御装置及び電動アシスト車 |
| JP5575938B1 (ja) * | 2013-02-07 | 2014-08-20 | 株式会社シマノ | 自転車用制御装置 |
| JP2014208522A (ja) * | 2013-03-29 | 2014-11-06 | ヤマハ発動機株式会社 | 電動自転車用制御装置、電動自転車用パワーユニットおよび電動自転車 |
| EP3009295A4 (en) | 2013-06-14 | 2017-07-05 | Microspace Corporation | Motor drive control device |
| JP6254878B2 (ja) * | 2014-03-24 | 2017-12-27 | ブリヂストンサイクル株式会社 | 電動アシスト自転車 |
| US10788383B2 (en) * | 2014-08-15 | 2020-09-29 | Cheevc Ltd | Power vector sensor device and bicycle having the same |
| TWI619638B (zh) * | 2014-08-20 | 2018-04-01 | Taiyo Yuden Co Ltd | Motor drive control device and electric auxiliary vehicle |
| CN107107985B (zh) * | 2014-11-18 | 2019-08-20 | 泽哈斯有限责任公司 | 用于控制脉冲型人力车辆的运动的系统 |
| JP6427433B2 (ja) | 2015-02-03 | 2018-11-21 | マイクロスペース株式会社 | モータ駆動装置 |
| US9896152B2 (en) * | 2015-05-25 | 2018-02-20 | Shimano Inc. | Bicycle transmission system |
| US9637197B2 (en) * | 2015-07-01 | 2017-05-02 | GM Global Technology Operations LLC | Dynamic inertia compensation and pedal effort transformation for electric bike |
| JP2017100540A (ja) | 2015-12-01 | 2017-06-08 | ヤマハ発動機株式会社 | 電動補助自転車 |
| CN106515985A (zh) * | 2016-11-18 | 2017-03-22 | 海贝(天津)科技有限责任公司 | 电动助力自行车电机控制器倾角传感调速方法 |
| US10710675B2 (en) * | 2017-06-21 | 2020-07-14 | Chanmin Park | Electric bike |
| TWI651237B (zh) * | 2017-11-13 | 2019-02-21 | 財團法人金屬工業研究發展中心 | 電助自行車及其輔助動力的控制方法 |
| US10322770B1 (en) | 2017-11-27 | 2019-06-18 | Metal Industries Research & Development Centre | Electricity aided bicycle and auxiliary power controlling method thereof |
| JP7125889B2 (ja) * | 2018-04-27 | 2022-08-25 | 株式会社シマノ | 人力駆動車用制御装置 |
| CN112640295B (zh) * | 2018-09-21 | 2023-11-28 | 新电元工业株式会社 | 车辆用电机驱动控制装置及车辆用电机驱动控制装置的控制方法 |
| JP6752871B2 (ja) * | 2018-12-25 | 2020-09-09 | キヤノン株式会社 | モータ制御装置、シート搬送装置、原稿給送装置、原稿読取装置及び画像形成装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0858668A (ja) * | 1994-08-18 | 1996-03-05 | Honda Motor Co Ltd | 電動補助自転車 |
| JPH0880891A (ja) * | 1994-09-13 | 1996-03-26 | Yamaha Motor Co Ltd | 補助動力付き人力車両 |
| JPH1059260A (ja) * | 1996-08-20 | 1998-03-03 | Sanyo Electric Co Ltd | 電動車用モータのトルク制限装置 |
| JPH10114292A (ja) * | 1996-10-11 | 1998-05-06 | Tec Corp | 電動補助動力装置付自転車 |
| JPH1179062A (ja) * | 1997-08-29 | 1999-03-23 | Toshiba Tec Kk | 電動補助動力装置付自転車 |
| JP2000118479A (ja) * | 1998-10-12 | 2000-04-25 | Sony Corp | 助力機能付き自転車 |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63314018A (ja) | 1987-06-17 | 1988-12-22 | Matsushita Electric Ind Co Ltd | Pwm信号出力回路 |
| JP2634121B2 (ja) * | 1992-03-06 | 1997-07-23 | ヤマハ発動機株式会社 | 電動モータ付き自転車およびそのモータ制御方法 |
| JP3301811B2 (ja) | 1993-03-05 | 2002-07-15 | 株式会社モリック | 電動モータ付き自転車 |
| WO1996032314A1 (en) * | 1995-04-11 | 1996-10-17 | Aerovironment Inc. | Electric power apparatus for a wheeled vehicle |
| JP3655350B2 (ja) | 1995-04-28 | 2005-06-02 | ヤマハ発動機株式会社 | パワーアシスト車両の駆動装置 |
| US5662187A (en) * | 1995-07-27 | 1997-09-02 | Mc Govern; James Robert | Electrically assisted pedalled bicycle |
| US5937962A (en) * | 1995-08-08 | 1999-08-17 | Yamaha Hatsudoki Kabushiki Kaisha | Bicycle with assist engine |
| JP3709583B2 (ja) | 1995-08-22 | 2005-10-26 | 株式会社デンソー | 内燃機関のスロットル制御装置 |
| JPH1059262A (ja) | 1996-08-20 | 1998-03-03 | Sanyo Electric Co Ltd | 電気自転車用モータの出力制御方式 |
| US5922035A (en) * | 1997-12-03 | 1999-07-13 | Winston Hsu | Fuzzy logic control system for electrical aided vehicle |
| JPH11227438A (ja) | 1998-02-16 | 1999-08-24 | Calsonic Corp | 車両空調システムのファンモータ駆動制御装置 |
| JP3955152B2 (ja) | 1998-06-08 | 2007-08-08 | 松下電器産業株式会社 | 補助動力装置付き車輌及びその制御装置 |
| IT1310144B1 (it) * | 1999-08-24 | 2002-02-11 | Ferrero Spa | Sistema e procedimento per il controllo di trasmissioni a rapportovariabile |
| JP2002019624A (ja) * | 2000-07-06 | 2002-01-23 | Koyo Seiko Co Ltd | 電動パワーステアリング装置 |
| FR2811824B1 (fr) | 2000-07-17 | 2002-10-18 | Sagem | Moteur electrique a deux modes de communication d'alimentation |
| JP2003104274A (ja) * | 2001-09-27 | 2003-04-09 | Honda Motor Co Ltd | 電動補助自転車 |
| JP4184026B2 (ja) * | 2002-10-03 | 2008-11-19 | 三菱電機株式会社 | ピーク抑圧装置および送信装置 |
| JP2004322809A (ja) * | 2003-04-24 | 2004-11-18 | Sony Corp | 電動アシスト自転車 |
| JP4350531B2 (ja) * | 2004-01-08 | 2009-10-21 | 本田技研工業株式会社 | 電動車両 |
| JP5050387B2 (ja) | 2006-04-03 | 2012-10-17 | 日産自動車株式会社 | モーター制御装置 |
| WO2007120819A2 (en) * | 2006-04-15 | 2007-10-25 | The Board Of Regents Of The Leland Stanford Junior University | Systems and methods for estimating surface electromyography |
| JP5317422B2 (ja) | 2007-03-20 | 2013-10-16 | 株式会社ミツバ | モータの制御装置及びモータの制御方法並びに電動車両 |
| CN201113914Y (zh) * | 2007-09-03 | 2008-09-10 | 崔伟斌 | 电动自行车用低压交流电动机驱动和控制装置 |
| JP5035641B2 (ja) | 2009-11-30 | 2012-09-26 | アイシン・エィ・ダブリュ株式会社 | 電動機駆動装置の制御装置 |
-
2011
- 2011-12-13 US US13/995,769 patent/US9120531B2/en active Active
- 2011-12-13 JP JP2012549735A patent/JP5586709B2/ja active Active
- 2011-12-13 EP EP11851554.3A patent/EP2657118B1/en active Active
- 2011-12-13 CN CN201180061410.1A patent/CN103429490B/zh active Active
- 2011-12-13 CN CN201710402901.7A patent/CN107253507B/zh active Active
- 2011-12-13 WO PCT/JP2011/078760 patent/WO2012086458A1/ja active Application Filing
- 2011-12-22 TW TW100148106A patent/TWI650268B/zh active
-
2014
- 2014-06-09 JP JP2014118326A patent/JP5977782B2/ja active Active
-
2016
- 2016-02-04 JP JP2016019665A patent/JP6178440B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0858668A (ja) * | 1994-08-18 | 1996-03-05 | Honda Motor Co Ltd | 電動補助自転車 |
| JPH0880891A (ja) * | 1994-09-13 | 1996-03-26 | Yamaha Motor Co Ltd | 補助動力付き人力車両 |
| JPH1059260A (ja) * | 1996-08-20 | 1998-03-03 | Sanyo Electric Co Ltd | 電動車用モータのトルク制限装置 |
| JPH10114292A (ja) * | 1996-10-11 | 1998-05-06 | Tec Corp | 電動補助動力装置付自転車 |
| JPH1179062A (ja) * | 1997-08-29 | 1999-03-23 | Toshiba Tec Kk | 電動補助動力装置付自転車 |
| JP2000118479A (ja) * | 1998-10-12 | 2000-04-25 | Sony Corp | 助力機能付き自転車 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2657118B1 (en) | 2021-03-03 |
| CN107253507A (zh) | 2017-10-17 |
| EP2657118A1 (en) | 2013-10-30 |
| JP2016064833A (ja) | 2016-04-28 |
| US20140039741A1 (en) | 2014-02-06 |
| TW201231348A (en) | 2012-08-01 |
| CN103429490A (zh) | 2013-12-04 |
| CN107253507B (zh) | 2020-06-23 |
| WO2012086458A1 (ja) | 2012-06-28 |
| CN103429490B (zh) | 2017-06-27 |
| JP2014159283A (ja) | 2014-09-04 |
| US9120531B2 (en) | 2015-09-01 |
| JPWO2012086458A1 (ja) | 2014-05-22 |
| JP6178440B2 (ja) | 2017-08-09 |
| EP2657118A4 (en) | 2014-05-07 |
| JP5977782B2 (ja) | 2016-08-24 |
| TWI650268B (zh) | 2019-02-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6178440B2 (ja) | モータ駆動制御装置 | |
| JP5689849B2 (ja) | モータ駆動制御装置 | |
| JP6619836B2 (ja) | モータ駆動制御装置 | |
| EP2658114B1 (en) | Motor drive control device | |
| US8725340B1 (en) | Motor drive controller and electric power-assisted vehicle | |
| JP5602186B2 (ja) | モータ駆動制御装置 | |
| TWI519433B (zh) | 馬達驅動控制裝置 | |
| JP5965517B2 (ja) | モータ制御装置及び制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140408 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140609 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140701 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140722 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5586709 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |