WO2011036721A1 - 車載用レーダ装置 - Google Patents
車載用レーダ装置 Download PDFInfo
- Publication number
- WO2011036721A1 WO2011036721A1 PCT/JP2009/004862 JP2009004862W WO2011036721A1 WO 2011036721 A1 WO2011036721 A1 WO 2011036721A1 JP 2009004862 W JP2009004862 W JP 2009004862W WO 2011036721 A1 WO2011036721 A1 WO 2011036721A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- vehicle
- synthetic aperture
- aperture processing
- radar device
- received signal
- Prior art date
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/89—Radar or analogous systems specially adapted for specific applications for mapping or imaging
- G01S13/90—Radar or analogous systems specially adapted for specific applications for mapping or imaging using synthetic aperture techniques, e.g. synthetic aperture radar [SAR] techniques
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/87—Combinations of radar systems, e.g. primary radar and secondary radar
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/89—Radar or analogous systems specially adapted for specific applications for mapping or imaging
- G01S13/90—Radar or analogous systems specially adapted for specific applications for mapping or imaging using synthetic aperture techniques, e.g. synthetic aperture radar [SAR] techniques
- G01S13/904—SAR modes
- G01S13/9041—Squint mode
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/89—Radar or analogous systems specially adapted for specific applications for mapping or imaging
- G01S13/90—Radar or analogous systems specially adapted for specific applications for mapping or imaging using synthetic aperture techniques, e.g. synthetic aperture radar [SAR] techniques
- G01S13/904—SAR modes
- G01S13/9089—SAR having an irregular aperture
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
- G01S13/589—Velocity or trajectory determination systems; Sense-of-movement determination systems measuring the velocity vector
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/932—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles using own vehicle data, e.g. ground speed, steering wheel direction
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
- G01S2013/93271—Sensor installation details in the front of the vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
- G01S2013/93272—Sensor installation details in the back of the vehicles
Definitions
- the present invention relates to an on-vehicle radar device, and more particularly to an on-vehicle radar device that detects an object mounted on a vehicle and approaching from the periphery of the vehicle.
- a vehicle-mounted object detection device mounted on the host vehicle is known in order to detect an object approaching from the front or side of the host vehicle. Specifically, the vehicle-mounted object detection device detects an object approaching the host vehicle with a radar device (for example, a millimeter wave radar device). And the said vehicle-mounted object detection apparatus judges the danger that the own vehicle and an object will collide based on the said detection result. Further, the vehicle-mounted object detection device controls various devices provided in the host vehicle when it is determined that there is a risk of collision between the host vehicle and the object.
- a radar device for example, a millimeter wave radar device
- the radar device used in the above-described vehicle-mounted object detection device information on the position, direction, speed, and the like of the object with respect to the host vehicle is obtained with high accuracy with respect to the object existing in front or side of the host vehicle. It is required to accurately grasp the positional relationship between the vehicle and the object.
- a radar device used for a general vehicle-mounted object detection device it is possible to know the presence of an object but not to accurately determine the size of the object (for example, the vehicle width of another vehicle).
- the aperture area of the antenna of the radar apparatus cannot be increased. This is because, in the case of a radar device using radio waves, the resolution in the angular direction is proportional to the aperture area of the antenna. That is, since the radar device used in the vehicle-mounted object detection device is assumed to be mounted on a vehicle, the size of the radar device is limited, and the opening area of the antenna cannot be increased so much.
- a method of arranging a plurality of receiving antenna elements in the radar device is used in order to increase the resolution of the radar device used in the vehicle-mounted object detection device.
- an in-vehicle object detection device is insufficient for a signal received by each receiving antenna using a signal processing method having a high processing load such as DBF (Digital Beam Forming) or MUSIC (MUltiple SIgnal Classification). The current situation is to compensate for the resolution.
- a technique disclosed in Patent Document 1 for example, as a technique for realizing a radar having an antenna having a large aperture area even in a radar apparatus having a small number of antenna elements.
- Patent Document 1 extracts a ground target by synthetically opening a reflected wave obtained by a radar device mounted on a mobile platform such as an aircraft or artificial hygiene.
- Patent Document 1 assumes that a radar device is mounted on an aircraft, artificial hygiene, or the like, the technique cannot be applied to a vehicle as it is. Further, the technique disclosed in Patent Document 1 reproduces a stationary target on the ground as image data by processing a signal obtained by a radar apparatus. For this reason, there is a problem that complicated processing is required and the processing load increases.
- the present invention has been made in view of the above circumstances, and an object of the present invention is to provide an on-vehicle radar device capable of obtaining a high azimuth resolution with a simple configuration.
- a vehicle-mounted radar device mounted on a vehicle, wherein the detection unit radiates electromagnetic waves around the vehicle and outputs a reception signal obtained by a reflected wave reflected from an object existing around the vehicle; Vehicle information calculation means for calculating information relating to movement of the vehicle using vehicle information of the vehicle, storage means for storing a plurality of reception signals output at different times by the detection means, and information relating to movement of the vehicle And a synthetic aperture processing means for performing synthetic aperture processing of the received signals respectively obtained at different positions on the vehicle.
- a second aspect of the present invention relates to the movement of the vehicle according to the first aspect, wherein the vehicle information calculation means uses the vehicle information of the vehicle to indicate information indicating the position at which the received signal is obtained. Calculated as information, the storage means stores the received signal together with information indicating the position where the received signal is obtained, and the synthetic aperture processing means is configured to receive the received signal based on the position where the received signal is obtained. Signal synthetic aperture processing is performed.
- the vehicle information calculation means further calculates a time interval at which the received signal is obtained based on time information at which the received signal is obtained.
- the synthetic aperture processing means performs synthetic aperture processing of the received signal based on the position where the received signal is obtained and the time interval when the received signal is obtained.
- the vehicle information calculation means further uses the vehicle information of the vehicle to indicate the direction of the vehicle from which the reception signal is obtained. Information is calculated, the storage means stores the received signal together with information indicating the direction of the vehicle from which the received signal was obtained, and the synthetic aperture processing means is obtained from the direction of the vehicle from which the received signal was obtained. The synthetic aperture processing of the received signal is performed based on the direction in which the electromagnetic wave is irradiated and the position where the received signal is obtained.
- the vehicle information calculation means uses the vehicle information of the vehicle to calculate information indicating a trajectory of the vehicle as information related to the movement of the vehicle.
- the storage means stores information indicating a trajectory of the movement of the vehicle as a first trajectory together with the received signal, and the synthetic aperture processing means includes the first trajectory and the first trajectory.
- a second trajectory is calculated from the received signal, and synthetic aperture processing of the received signal is performed on the assumption that the received signal is obtained at different positions on the second trajectory.
- the synthetic aperture processing means performs the synthetic aperture processing by using a predetermined number of the received signals stored in the storage means. It is characterized by that.
- the synthetic aperture processing means increases or decreases the number of received signals used for the synthetic aperture processing according to a predetermined condition.
- the synthetic aperture processing means further performs a process of detecting an object around the vehicle by performing the synthetic aperture processing.
- a ninth aspect of the present invention is characterized in that, in the first aspect, the detection means is mounted on at least one of the front and rear of the vehicle.
- the tenth aspect of the present invention is characterized in that, in the eighth aspect, the apparatus further comprises a determination means for determining a risk of contact between the object detected by the synthetic aperture processing means and the vehicle.
- the antenna aperture area is increased (because there is a restriction on the size to be mounted). Even if this is not possible, it is possible to realize characteristics equivalent to those received by a radar apparatus having a large aperture area. Therefore, it is possible to provide an in-vehicle radar device that can obtain a high azimuth resolution with a simple configuration.
- the synthetic aperture processing can be easily performed.
- the synthetic aperture processing means can take into account the time interval at which the received signal is obtained in the synthetic aperture processing, so that the synthetic aperture processing can be performed on the received signal more accurately.
- the synthetic aperture processing can be performed on the received signal more accurately even if the vehicle orientation changes.
- the synthetic aperture processing can be performed on the received signal more accurately.
- synthetic aperture processing assuming a target to be separated and detected becomes possible. That is, for example, when it is assumed that a vehicle is parked in an empty space of a parking lot, a higher number of reception signals used for the synthetic aperture processing is set in advance in a scene where higher azimuth resolution is required. be able to.
- the number of received signals used for the synthetic aperture processing can be increased.
- the process of detecting an object around the vehicle is performed by performing the synthetic aperture process, for example, a plurality of objects existing around the vehicle can be separately detected.
- the detection means is mounted on at least one of the front and rear of the vehicle, for example, when a vehicle is parked in an empty space of a parking lot, a plurality of objects existing around the vehicle are separated. Can be detected and parked safely.
- the risk of contact between the object detected by the synthetic aperture processing means and the vehicle is determined, for example, safety measures such as alerting the driver of the vehicle can be taken.
- FIG. 1 is a diagram illustrating the movement of the host vehicle mv and the movement of the radar device mounted on the host vehicle mv.
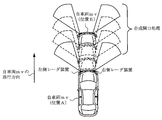
- FIG. 2 is a diagram illustrating an example of the front mounting position of the radar apparatus 1.
- FIG. 3 is a block diagram illustrating an example of a configuration of a driver support system including an in-vehicle radar device according to an embodiment.
- FIG. 4 is a diagram for explaining the movement of the receiving antenna of the radar mounted on the moving body.
- FIG. 5 is a flowchart illustrating an example of processing performed in each unit of the radar ECU 2 of the in-vehicle radar device according to the embodiment.
- FIG. 6 is a diagram for explaining an example of the synthetic aperture processing.
- FIG. 1 is a diagram illustrating the movement of the host vehicle mv and the movement of the radar device mounted on the host vehicle mv.
- FIG. 2 is a diagram illustrating an example of the front mounting position of the radar apparatus 1.
- FIG. 3 is a block diagram illustrating
- FIG. 7 is a diagram illustrating a result of synthetic aperture processing using the reception signal SR (1), the reception signal (2), and the reception signal (3).
- FIG. 8 is a diagram illustrating an example of a trajectory of the host vehicle mv.
- FIG. 9 is a diagram showing an example of the surrounding environment of the host vehicle mv.
- FIG. 10 is a diagram illustrating an example of a configuration of a radar apparatus having a single reception system.
- FIG. 11 is a diagram illustrating an example of a configuration of a radar apparatus having a plurality of reception systems.
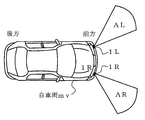
- FIG. 12 is a diagram illustrating an example of the rear mounting position of the radar apparatus 1.
- DSS Driver Support System
- FIG. 1 is a diagram illustrating the movement of the host vehicle mv and the movement of the radar device mounted on the host vehicle mv.
- the radar devices are mounted on the left and right of the front portion of the host vehicle mv as an example (the right radar device and the left radar device shown in FIG. 1).
- the host vehicle mv travels from the position A to the position B in the direction of the arrow shown in FIG. 1 (the traveling direction of the host vehicle mv).
- a plurality of received signals obtained from the right-side radar apparatus are combined (synthetic aperture processing) before the host vehicle mv moves from position A to position B, it is as if a large aperture area (antenna)
- the on-vehicle radar device stores, for example, a plurality of reception signals output at different times by the right-side radar device, and based on information related to the movement of the own vehicle mv. Synthetic aperture processing is performed on received signals obtained at different positions of mv.
- the on-vehicle radar device performs synthetic aperture processing on a plurality of received signals obtained by the radar device while moving in a certain section (for example, the section from position A to position B as shown in FIG. 1). As a result, the resolution in the azimuth direction of the radar apparatus is increased.
- the information regarding the movement of the own vehicle mv is the information which shows the position from which the received signal was obtained, or the movement distance for every position from which the received signal was obtained.
- the on-vehicle radar device performs synthetic aperture processing on a plurality of received signals based on information indicating the direction of the host vehicle mv (that is, the antenna direction) and the time information on which the received signals are obtained. Also good.
- FIG. 2 is a block diagram showing an example of the configuration of the driver support system including the on-vehicle radar device according to the present embodiment.
- the driver support system includes a right radar device 1R, a left radar device 1L, a vehicle information detection unit 2, a radar ECU (Electrical Control Unit) 3, a vehicle control ECU 4, and a safety device 5.
- a right radar device 1R a left radar device 1L
- a vehicle information detection unit 2 a radar ECU (Electrical Control Unit) 3, a vehicle control ECU 4, and a safety device 5.
- a radar ECU Electronic Control Unit
- the right radar apparatus 1R includes a reception antenna R-atR and a transmission antenna T-atR (not shown) in the right radar apparatus 1R.
- the right-side radar device 1R is installed at a predetermined position of the host vehicle mv (for example, a position where a headlight or a direction indicator on the right side of the front side of the host vehicle mv is mounted), and outside the host vehicle mv.
- the electromagnetic wave is irradiated toward the vehicle and the surroundings in front of the vehicle mv are monitored.
- the right-side radar device 1R irradiates electromagnetic waves toward the right front of the host vehicle mv, and the target (AR in FIG. 3) existing within the detection range of the right-side radar device 1R (AR in FIG. 3).
- other vehicles, bicycles, pedestrians, buildings, etc. are detected.
- the left radar apparatus 1L includes a reception antenna R-atL and a transmission antenna T-atL (not shown) in the left radar apparatus 1L.
- the left radar device 1L is installed at a predetermined position of the host vehicle mv (for example, a position where a headlight or a direction indicator on the left side of the front of the host vehicle mv is mounted), and outside the host vehicle mv.
- the electromagnetic wave is irradiated toward the vehicle and the surroundings in front of the vehicle mv are monitored.
- the left radar device 1L irradiates electromagnetic waves toward the left front of the host vehicle mv, and the target (AL in FIG. 3) exists within the detection range of the left radar device 1L (AL in FIG. 3).
- the target AL in FIG. 3
- the right radar device 1R and the left radar device 1L are collectively referred to simply as the radar device 1 unless the right radar device 1R and the left radar device 1L are particularly distinguished from each other.
- Vehicle information detection unit 2 detects vehicle information of the host vehicle mv.
- the vehicle information detection unit 2 includes a speed sensor that detects the speed of the host vehicle mv, a travel distance sensor that detects a moving distance of the host vehicle mv, a yaw rate sensor that detects the yaw rate of the host vehicle mv, and the host vehicle.
- a lateral acceleration sensor (for example, a three-axis G sensor) that detects acceleration in the vehicle width direction that acts on the center of gravity position of mv, a steering angle sensor that detects the steering angle of the host vehicle mv, a roll sensor, a roch sensor, and the current time are reported.
- Vehicle information is acquired from various sensors such as a clock. Information output from the various sensors (specifically, vehicle speed, moving distance, yaw rate, lateral acceleration, steering angle, current time, and the like of the host vehicle mv) is referred to as vehicle information imv.
- the radar ECU 3 is an information processing apparatus including a radar signal processing unit 31, a vehicle information processing unit 32, a synthetic aperture processing unit 33, an information storage unit 34, an interface circuit, and the like.
- the radar signal processing unit 31 acquires the reception signal SR from the right radar device 1R. Similarly, the radar signal processing unit 31 acquires the reception signal SL from the left radar device 1L.
- the radar device 1 and the radar signal processing unit 31 correspond to an example of a detection unit described in the claims.
- the vehicle information processing unit 32 detects the movement of the radar device 1 based on the vehicle information imv output from the vehicle information detection unit 2.
- the vehicle information processing unit 32 corresponds to an example of vehicle information processing means described in the claims.
- FIG. 4 is a diagram for explaining the movement of the receiving antenna of the radar apparatus mounted on the moving body (for example, the host vehicle mv).
- a radar apparatus emits electromagnetic waves from a transmission antenna provided in the radar and receives reflected waves by a reception antenna. Further, when the radar apparatus is mounted on a moving body (for example, the host vehicle mv), the radar receiving antenna also moves with the movement of the moving body.
- reception antenna shown in FIG. 4 is assumed to be the reception antenna R-atR of the right radar apparatus 1R mounted on the host vehicle mv, and the reception antenna R-atR provided in the right radar apparatus 1R is assumed. In the following description, it is assumed that there is one transmission antenna T-atR. Further, the following description will be made assuming that the host vehicle mv is traveling straight in the direction of the arrow Vmv in FIG.
- the receiving antenna R-atR is at a certain position at a certain time (for example, the position PR (1) of the receiving antenna R-atR (1) in FIG. 4).
- the receiving antenna R-atR (1) is generated as the host vehicle mv moves in the moving direction of the host vehicle mv (arrow Vmv in FIG. 4). Will also move in the direction of the arrow VatR in FIG.
- the receiving antenna R-atR (1) at a certain position receives the receiving antenna R-atR (2) and the receiving antenna R-atR as the host vehicle mv moves (runs). (3) and move.
- the position of the receiving antenna R-atR (1) at a certain position changes with time as the receiving antenna R-atR (2) and the receiving antenna R-atR (3).
- the vehicle information processing unit 32 calculates the position of the reception antenna R-atR based on the vehicle information imv output from the vehicle information detection unit 2. For example, the vehicle information processing unit 32 determines the position PR (1) of the reception antenna R-atR (1) and the position of the reception antenna R-atR (2) based on the vehicle information imv output from the vehicle information detection unit 2. PR (2) and the position PR (3) of the receiving antenna R-atR (3) are calculated.
- the vehicle information processing unit 32 uses the reception antenna R-atR (2) and the reception antenna R-atR (3) with reference to the reception antenna R-atR (1) at a certain position based on the vehicle information imv. ) Can be calculated. In other words, the vehicle information processing unit 32 can calculate the movement amount of the reception antenna R-atR (1) (change in the position of the reception antenna R-atR (1) accompanying the movement of the host vehicle mv).
- the synthetic aperture processing unit 33 performs synthetic aperture processing based on information stored in the information storage unit 34 described later. Details of the synthetic aperture processing performed by the synthetic aperture processing unit 33 will be described later.
- the synthetic aperture processing unit 33 corresponds to an example of a synthetic aperture processing unit described in the claims.
- the information storage unit 34 temporarily stores the received signal SR acquired by the radar signal processing unit 31 from the right radar device 1R. Further, the information storage unit 34 indicates the position PR of the right radar device 1R (that is, the position PR of the reception antenna R-atR) when the radar signal processing unit 31 acquires the reception signal SR from the right radar device 1R. Memorize temporarily. At this time, the information storage unit 34 temporarily stores the received signal SR in association with the position PR of the right radar apparatus 1R when the received signal SR is acquired.
- the information storage unit 34 corresponds to an example of a storage unit described in the claims.
- the right-side radar device 1R will be specifically described with reference to FIG. 4 as an example.
- the position of the receiving antenna R-atR (1) is defined as a position PR (1), and the position PR (1)
- the reception signal SR received by the reception antenna R-atR (1) is set as the reception signal SR (1).
- the information storage unit 34 temporarily stores the position PR (1) and the received signal SR (1) in association with each other.
- the position of the reception antenna R-atR (2) is set to a position PR (2), and the reception signal SR received by the reception antenna R-atR (2) at the position PR (2) is received signal SR (2 ) And set.
- the right radar apparatus 1R that is, the receiving antenna R-atR
- the vehicle control ECU 4 detects the information output from the radar ECU 3 (specifically, the distance from the host vehicle mv to the target, the target vehicle relative to the host vehicle mv). Based on the existing direction and the relative speed of the target, it is determined whether or not there is a risk of collision (contact) between the host vehicle mv and the target. When the vehicle control ECU 4 determines that there is a risk of collision (contact) between the host vehicle mv and the target, the vehicle control ECU 4 instructs the safety device 5 to take safety measures described later.
- the safety device 5 alerts the driver of the host vehicle mv in accordance with an instruction from the vehicle control ECU 4 when the risk of a collision with the target is high.
- the safety device 5 also includes various devices for reducing the damage to the occupant of the host vehicle mv and for easing the occupant protection and collision conditions when a collision with the target is unavoidable.
- the operations performed by the safety device 5, that is, alerting the driver, collision danger avoiding operation, collision damage reducing operation, and the like are collectively referred to as safety measures.
- each unit of the radar ECU 3 of the on-vehicle radar device will be described.
- the radar signal processing unit 31 acquires the reception signal SR from the right-side radar device 1R
- an example in which each unit of the radar ECU 3 performs the synthetic aperture processing using the reception signal SR is taken as an example. explain.
- the following description will be made on the assumption that the right radar apparatus 1R is provided with one receiving antenna.
- FIG. 5 is a flowchart showing an example of processing performed in each part of the radar ECU 3 of the on-vehicle radar device according to the present embodiment.
- the processing of the flowchart shown in FIG. 5 is performed by the radar ECU 3 executing a predetermined program provided in the radar ECU 3. Furthermore, a program for executing the processing shown in FIG. 5 is stored in advance in a storage area of the radar ECU 3, for example. Further, when the power of the radar ECU 3 is turned on (for example, when the ignition switch of the host vehicle mv is turned on), the processing of the flowchart shown in FIG.
- the radar signal processing unit 31 acquires the reception signal SR from the right radar device 1R, outputs the reception signal SR to the vehicle information processing unit 32, and proceeds to the next step S12.
- step S12 the vehicle information processing unit 32 acquires the vehicle information imv output from the vehicle information detection unit 2, and proceeds to the next step S13.
- the vehicle information processing unit 32 converts the vehicle information imv and the reception signal SR to the vehicle information, respectively. Let imv (2) and received signal SR (2). And the vehicle information processing part 32 advances a process to the following step S14 after the process in the said step.
- step S14 the information storage unit 34 temporarily stores the vehicle information imv (k) and the reception signal SR (k) output from the vehicle information processing unit 32 in step S13.
- the information storage unit 34 stores the vehicle information imv (1) and the reception signal SR (1), and the process of the flowchart is repeated, whereby the vehicle information imv. (2) and the received signal SR (2) are stored. That is, in this way, the vehicle information imv when the radar signal processing unit 31 acquires the reception signal SR from the right radar device 1R can be associated. Thereafter, the information storage unit 34 advances the processing to the next step S15.
- step S15 the vehicle information processing unit 32 determines whether a plurality of pieces of vehicle information imv are stored.
- the information storage unit 34 is associated with the received signal SR (1), the received signal (2), the received signal (3). 1), vehicle information imv (2), vehicle information imv (3)... Are stored.
- a plurality of pieces of vehicle information imv are required to calculate the position PR of the right radar apparatus 1R (that is, the receiving antenna R-atR) in the next step S16.
- the vehicle information processing unit 32 denies the determination (NO) and returns the process to step S11 in the process of this step.
- the vehicle information processing unit 32 affirms the determination (YES) in the processing of the step.
- the process proceeds to the next step S16.
- the vehicle information processing unit 32 determines that the host vehicle mv is not moving as a result of referring to the plurality of vehicle information imv even when a plurality of vehicle information imv is stored in the information storage unit 34. May negate the process of step S15. Then, the plurality of vehicle information imv and the reception signal SR corresponding to the plurality of vehicle information imv may be deleted from the information storage unit 34.
- the vehicle information processing unit 32 refers to the plurality of vehicle information imv, and as a result, the vehicle information imv indicating the same time point and the vehicle information imv
- the overlapping vehicle information imv and the reception signal SR corresponding to the vehicle information imv may be deleted, and the process may proceed to step S16.
- the information storage unit 34 stores the vehicle information imv (5), the received signal SR (5) corresponding to the vehicle information imv (5), the vehicle information imv (6), and the vehicle information imv (6 ) Is stored, the vehicle information processing unit 32 refers to the vehicle information imv (5) and the vehicle information imv (6). As a result, the vehicle information imv (5) If it is determined that the host vehicle mv has not moved until the vehicle information imv (6) is obtained, the vehicle information imv (5) or the vehicle information imv (6) may be deleted.
- step S16 which is the next process in which the determination in step S15 is affirmed (YES)
- the vehicle information processing unit 32 calculates the position PR (k) of the right radar apparatus 1R (that is, the receiving antenna R-atR). .
- the radar signal processing unit 31 first receives the received signal SR (that is, the received signal SR (1)) from the right radar device 1R (that is, the receiving antenna R-atR (1)). Assuming that Note that the position of the receiving antenna R-atR (1) at this time is defined as a position PR (1). Further, the host vehicle mv moves, and then the radar signal processing unit 31 acquires the received signal SR (that is, the received signal SR (2)) from the right radar device 1R (that is, the receiving antenna R-atR (2)). Suppose that. Similarly, the position of the receiving antenna R-atR (2) at this time is defined as a position PR (2).
- step S16 the vehicle information processing unit 32 calculates the position PR (k) of the right radar device 1R, that is, in the above example, calculates the position PR (1) of the receiving antenna R-atR (1).
- the processing of the flowchart is started, and the radar signal processing unit 31 first receives the reception signal SR (that is, reception) from the right radar device 1R (that is, reception antenna R-atR (1)).
- the position PR (1) of the receiving antenna R-atR (1) is calculated with reference to the position PR (1) of the right radar apparatus 1R at the time of the signal SR (1)).
- the position PR (1) of the receiving antenna R-atR (1) is the position PR (1) (0, 0).
- the vehicle information processing unit 32 refers to the vehicle information imv (1) and the vehicle information imv (2), and sets the position PR (1) of the reception antenna R-atR (1) as the origin (0, 0).
- the position PR (2) of the receiving antenna R-atR (2) in the coordinate system (x, y) is calculated.
- the position PR of the receiving antenna R-atR may be calculated in a coordinate system (x, y) having an arbitrary point as the origin.
- the vehicle information processing unit 32 determines that the host vehicle mv is traveling straight (for example, as described in FIG. 4), the position PR of the receiving antenna R-atR Each position may be calculated from the moving distance of the receiving antenna R-atR. That is, when the host vehicle mv is traveling straight, the vehicle information processing unit 32 may calculate the position PR using, for example, the travel distance included in the vehicle information imv.
- the information storage unit 34 stores the reception signal SR and the position PR in association with each other temporarily. Specifically, in the information storage unit 34, the position PR (k) of the right radar device 1R when the radar signal processing unit 31 acquires the received signal SR (k) from the right radar device 1R is stored as a set. . More specifically, for example, the position PR of the right radar device 1R when the radar signal processing unit 31 acquires the received signal SR (2) from the right radar device 1R is stored in the information storage unit 34 at the position PR (2 ) Will be stored.
- the information storage unit 34 moves the reception antenna R-atR from the reception signal (k) to the reception signal (k + 1).
- the distance ⁇ d may be stored. That is, the information storage unit 34 stores, for example, the movement distance ⁇ d21 of the reception antenna R-atR from when the radar signal processing unit 31 acquires the reception signal (1) until the reception signal (2) is acquired. Good.
- the radar signal processing unit 31 also acquires the reception signal SR (k) from the right radar device 1R. You may memorize
- each part of the radar ECU 3 performs the processes of steps S11 to S17, so that the radar apparatus 1R when the radar signal processor 31 acquires the received signal SR (k) from the right radar apparatus 1R.
- the position PR (k) can be stored in association with it.
- the synthetic aperture processing unit 33 performs synthetic aperture processing using the received signal SR and the position PR (which may be the movement amount ⁇ d) stored in the information storage unit 34.
- the synthetic aperture processing unit 33 may perform the synthetic aperture processing in consideration of the time interval when the radar signal processing unit 31 acquires the reception signal SR (k) from the right radar apparatus 1R.
- the synthetic aperture processing unit 33 determines whether or not M or more reception signals SR stored in the information storage unit 34 are stored. Specifically, in the processing from step S18 onward, the synthetic aperture processing unit 33 uses the data stored in the information storage unit 34 (the received signal SR and the position PR (or the movement amount ⁇ d corresponding to the received signal SR). )) Is used to perform synthetic aperture processing. In other words, in the process of step S18, the synthetic aperture processing unit 33 determines whether or not data sufficient to allow the synthetic aperture processing unit 33 to perform the synthetic aperture processing is stored in the predetermined information storage unit 34. To do. Note that the number of reception signals SR (k) is one.
- step S18 if the synthetic aperture processing unit 33 affirms the determination (YES), that is, if it is determined that M or more reception signals SR are stored in the information storage unit 34, the next step The process proceeds to S19. On the other hand, if the determination is negative (YES), that is, if it is determined that M or more reception signals SR are not stored in the information storage unit 34, the synthetic aperture processing unit 33 returns the process to step S11.
- the synthetic aperture processing unit 33 uses the N received signals SR among the received signals SR stored in the information storage unit 34 to perform synthetic aperture processing. I do.
- the process which the synthetic aperture process part 33 performs in the said step S19 is demonstrated using FIG.
- each unit of the radar ECU 3 acquires the reception signal SR (1) from the reception antenna R-atR (1) for the first time after the processing of the flowchart is started. Then, as the host vehicle mv moves, the receiving antenna R-atR (1) moves with the receiving antenna R-atR (2) and the receiving antenna R-atR (3) as shown in FIG. It shall be.
- the synthetic aperture processing unit 33 performs synthetic aperture processing on the received signal SR (1), the received signal SR (2), and the received signal (3). Will be described as an example.
- the synthetic aperture processing unit 33 performs synthetic aperture on the reception signal SR obtained from the reception antenna R-atR between the position PR (1) and the position PR (3).
- reception signals SR for example, data indicating amplitude and phase
- the synthetic aperture processing unit 33 may perform the synthetic aperture processing based on the reception signal SR stored in the information storage unit 34 and the position PR corresponding to the reception signal SR.
- the synthetic aperture processing unit 33 may perform the synthetic aperture processing of the received signal SR in consideration of the time interval obtained by the vehicle information processing unit 32 when the received signal SR is obtained. Specifically, the synthetic aperture processing unit 33 obtains the reception signal SR (3) from the reception signal SR (2), the time interval until the reception signal SR (2) is obtained from the reception signal SR (1). Based on the time interval until, for example, the synthetic aperture processing may be performed by combining the reception signal SR (1) and the reception signal SR (3) with the time received at the position PR (2). In general, the radar apparatus detects an object by irradiating an electromagnetic wave around the host vehicle mv and measuring a reflected wave from which the reflected wave returns.
- the host vehicle mv is not limited to a case where the vehicle is traveling straight ahead, so that the reception signal SR received by the reception antenna may arrive late depending on the position. Therefore, the synthetic aperture processing unit 33 can more accurately perform the synthetic aperture processing on the reception signal SR in consideration of the time interval at which the reception signal SR is obtained in the synthetic aperture processing.
- the host vehicle mv is not limited to traveling straight ahead.
- the direction of the host vehicle mv (reception antenna R) at each position PR.
- the direction of -atR) may also change. Therefore, the synthetic aperture processing unit 33 uses information indicating the direction of the host vehicle mv from which the reception signal SR calculated by the vehicle information processing unit 32 using the vehicle information imv is obtained, and the position where the reception signal is obtained. Based on this, the synthetic aperture processing of the received signal may be performed.
- the vehicle information processing unit 32 obtains the received signal SR. What is necessary is just to calculate the direction of the own vehicle mv at the time of being given.
- FIG. 7 is a diagram showing the result of the synthetic aperture processing using the received signal SR (1), the received signal (2), and the received signal (3). As shown in FIG. 7, by performing the synthetic aperture processing, even a radar having one receiving antenna can realize a radar having three receiving antennas.
- a directivity pattern such as lobe B can be obtained by performing synthetic aperture processing in the B direction (front direction of the receiving antenna) in FIG.
- a directivity pattern such as lobe C or lobe D can be obtained by performing synthetic aperture processing in the C direction or D direction in FIG. 7 (the left and right directions with respect to the front direction of the receiving antenna). That is, any directivity pattern of the lobe B, the lobe C, and the lobe D is thinner than the directivity pattern (lobe A) shown in FIG.
- separation and detection of the target Tg1 and the target Tg2 shown in FIG. 7 can be performed.
- the directivity of the receiving antenna is reduced, the target Tg1 and the target Tg2 that cannot be separated by the directivity of one receiving antenna (when the synthetic aperture processing is not performed) can be detected separately.
- step S ⁇ b> 20 in FIG. 5 the synthetic aperture processing unit 33 determines whether or not the resolution is appropriate.
- the case where the process of step S20 is affirmed is a case where the resolution is appropriate.
- the synthetic aperture processing unit 33 advances the process to step S21.
- the synthetic aperture processing unit 33 proceeds to step S22.
- step S20 The case where the process of step S20 is denied is a case where the desired resolution is not obtained.
- the synthetic aperture processing unit 33 adds L to N and repeats the step.
- the process of S19 is performed.
- the value of L is an arbitrary integer (1, 2, 3,).
- step S20 specific processing performed by the synthetic aperture processing unit 33 in step S20 will be described.
- the greater the number of reception signals SR used for synthetic aperture processing the higher the resolution in the azimuth direction.
- the number of received signals SR used for the synthetic aperture processing is three as an example in step S19.
- N increases in step S16, for example, a directional pattern thinner than lobe B can be obtained. (The same applies to lobe C and lobe D).
- the synthetic aperture processing unit 33 first analyzes the reception signal SR (1) to the reception signal SR (3) and the transmission signal, The distance from the right radar apparatus 1R to the target and the azimuth of the target with respect to the right radar apparatus 1R are calculated. Then, the synthetic aperture processing unit 33 calculates the angle difference in the azimuth direction (for example, the B direction (front direction of the receiving antenna) in FIG. 7) of a plurality of reflection points at substantially the same distance.
- the azimuth direction for example, the B direction (front direction of the receiving antenna) in FIG. 7
- the synthetic aperture processing unit 33 can determine whether or not the resolution is appropriate.
- the synthetic aperture processing unit 33 includes the reception signal SR (1) to the reception signal SR (3) and the transmission.
- the synthetic aperture processing unit 33 analyzes the reception signal SR (1) to reception signal SR (3) and the transmission signal, and as a result, the intensity (peak sharpness) of the obtained reflected wave is compared with the desired peak sharpness. If the intensity distribution is dull or gentle (when the intensity distribution of the reflected wave has a gentle gradient), it can be determined that the resolution is not appropriate.
- step S21 the synthetic aperture processing unit 33 outputs the distance from the right radar apparatus 1R to the target and the direction of the target with respect to the right radar apparatus 1R to the vehicle control ECU 4, and proceeds to the next step S23.
- step S20 in FIG. 5 described above the synthetic aperture processing unit 33 determines whether or not the resolution is appropriate. If the desired resolution is not obtained, the number of data used for the synthetic aperture processing (that is, the received signal) Number) was used. However, a third example described below can also be used as a method for determining whether or not the resolution is appropriate.
- the driver always operates the steering wheel, so there is often no constant velocity linear motion.
- the synthetic aperture processing it is necessary to accurately obtain the position where the host vehicle mv has received the reflected wave. In other words, if the position where the vehicle mv receives the reflected wave is shifted and the synthetic aperture processing is performed at a position different from the position where the reflected wave would have been originally obtained, the desired resolution may not be obtained. .
- the synthetic aperture processing unit 33 can also use the third example as a method for determining whether or not the resolution is appropriate.
- a third example of a method for the synthetic aperture processing unit 33 to determine whether or not the resolution is appropriate will be described with reference to FIG.
- FIG. 8 is a diagram showing an example of the trajectory of the host vehicle mv.
- the vehicle information processing unit 32 performs the b ′ point, the c ′ point, and the d ′ point based on the vehicle information imv obtained from the vehicle information detection unit 2 with respect to the a ′ point.
- the own vehicle mv can represent the trajectory of the own vehicle mv as shown by the broken line in FIG.
- the synthetic aperture processing unit 33 assumes several randomly generated trajectories by, for example, the Monte Carlo method with reference to the trajectory of the host vehicle mv indicated by the broken line in FIG.
- the synthetic aperture processing unit 33 assumes that the host vehicle mv has traveled on the randomly generated trajectory, and each of the position of the point a ′, the position of the point b ′, the position of the point c ′, and the position of the point d ′.
- the received signal obtained at the position is subjected to a synthetic aperture process, and the locus having the best reflected wave intensity (peak sharpness) is defined as a true locus (simply referred to as a locus in FIG. 8). That is, the synthetic aperture processing unit 33 performs the synthetic aperture processing based on the positions of the points a ′, b, c, and d shown in FIG. The result is output to the vehicle control ECU 4.
- the synthetic aperture processing unit 33 proceeds to step S22 when the determination in step S20 is denied in the above-described first method and second method.
- the synthetic aperture processing unit 33 may increase the number of reception signals used for the synthetic aperture processing by proceeding to step S22 in the third method described above, or may proceed to step S21.
- the synthetic aperture processing unit 33 may use one or more of the above-described first to third methods.
- step S23 the synthetic aperture processing unit 33 determines whether to end the process. For example, the synthetic aperture processing unit 33 performs processing of the flowchart shown in FIG. 5 by the synthetic aperture processing unit 33 when the power of the radar ECU 3 is turned off (for example, when the ignition switch of the host vehicle mv is turned off). Exit. On the other hand, when the synthetic aperture processing unit 33 determines to continue the process, the process returns to step S11 and repeats the process.
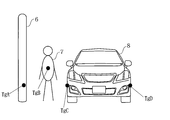
- FIG. 9 is a diagram showing an example of the surrounding environment of the host vehicle mv.
- FIG. 9 for example, it is assumed that there is a utility pole 6, a pedestrian 7, and another vehicle 8 that is stopped around the host vehicle mv.
- the directivity of one receiving antenna when the synthetic aperture processing is not performed for example, it is difficult to separately detect the target TgA, the target TgB, and the target TgC in FIG. 7. It was difficult to know that three objects such as the other vehicle 8 exist around the host vehicle mv.
- the in-vehicle radar device can detect the target TgA and the target TgB separately in the scene shown in FIG. 9 as a result of the reduced directivity by performing the synthetic aperture processing. .
- the number of received signals SR used for the synthetic aperture processing is increased (specifically, the value of N in step S19)
- the in-vehicle radar device has one unit as shown in FIG.
- the right corner and the left corner of the other vehicle 8 can be detected as the targets TgC and TgD.
- the size of an object for example, the vehicle width of the other vehicle 8 shown in FIG. 9 that could not be obtained with a general in-vehicle radar device.
- the value of N may be set in advance assuming a target to be separated and detected.
- the right radar apparatus 1R has one receiving antenna. That is, specifically, the description has been made assuming the right-side radar device 1R (left-side radar device 1L) having the configuration shown in FIG.
- the on-vehicle radar device according to the present embodiment increases the resolution in the azimuth direction by using the motion of the radar device 1 mounted on the host vehicle mv.
- a general in-vehicle radar device has a plurality of receiving antennas as shown in FIG. 11 in order to achieve the highest possible azimuth direction resolution in the in-vehicle radar device alone, and includes DBF, MUSIC, and the like.
- the on-vehicle radar device can increase the resolution in the azimuth direction even with a simple configuration including one receiving antenna, for example. Therefore, the circuit configuration can be simplified as compared with the above-described general in-vehicle radar device, and the cost can be reduced and the size can be reduced.
- each unit of the radar ECU 3 performs the synthetic aperture processing using the reception signal SR
- each part of the radar ECU 3 may perform the synthetic aperture processing using the received signal SL
- the radar signal processing unit 31 acquires the received signal SL from the left radar device 1L.
- the description of the aspect in which each part of the radar ECU 3 performs the synthetic aperture processing using the received signal SL is omitted because it can be analogized by the above description.
- the right-side radar device 1R and the left-side radar device 1L have a predetermined position at the front part of the host vehicle mv (for example, a headlight or a direction indicator on the front right side (left side) of the host vehicle mv.
- the position where the vehicle is mounted) the electromagnetic wave is irradiated toward the outside of the host vehicle mv, and the surroundings in front of the host vehicle mv are monitored.
- the right-side radar device 1R and the left-side radar device 1L are located at predetermined positions on the rear part of the host vehicle mv (for example, a position where a headlight or a direction indicator on the rear right side (left side) of the host vehicle mv is mounted). It may be installed and irradiated with electromagnetic waves toward the outside of the host vehicle mv, and the surroundings behind the host vehicle mv may be monitored.
- the in-vehicle radar device is useful for an in-vehicle radar device that detects an object that is mounted on a vehicle and that approaches from the periphery of the vehicle, which can obtain a high azimuth resolution with a simple configuration. is there.
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Radar Systems Or Details Thereof (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
車両に搭載される車載用レーダ装置であって、上記車両の周辺に電磁波を照射し、当該車両の周辺に存在する物体から反射された反射波によって得られる受信信号を出力する検出手段と、上記車両の車両情報を用いて、上記車両の移動に関する情報を算出する車両情報算出手段と、上記検出手段が異なる時点で出力した複数の上記受信信号を記憶する記憶手段と、上記車両の移動に関する情報に基づいて、上記車両が異なる位置でそれぞれ得られた上記受信信号の合成開口処理を行う合成開口処理手段とを備える。
1L…左側レーダ装置
2…車両情報検出部
31…レーダ信号処理部
32…車両情報処理部
33…開口合成処理部
34…情報記憶部
4…車両制御ECU
5…安全装置
6…電柱
7…歩行者
8…他車両
Claims (10)
- 車両に搭載される車載用レーダ装置であって、
前記車両の周辺に電磁波を照射し、当該車両の周辺に存在する物体から反射された反射波によって得られる受信信号を出力する検出手段と、
前記車両の車両情報を用いて、前記車両の移動に関する情報を算出する車両情報算出手段と、
前記検出手段が異なる時点で出力した複数の前記受信信号を記憶する記憶手段と、
前記車両の移動に関する情報に基づいて、前記車両が異なる位置でそれぞれ得られた前記受信信号の合成開口処理を行う合成開口処理手段とを備える、車載用レーダ装置。 - 前記車両情報算出手段は、前記車両の車両情報を用いて、前記受信信号がそれぞれ得られた位置を示す情報を前記車両の移動に関する情報として算出し、
前記記憶手段は、前記受信信号が得られた位置を示す情報と共に当該受信信号を記憶し、
前記合成開口処理手段は、前記受信信号が得られた位置に基づいて、当該受信信号の合成開口処理を行うことを特徴とする、請求項1に記載の車載用レーダ装置。 - 前記車両情報算出手段は、前記受信信号が得られた時間情報に基づいて、前記受信信号が得られた時間間隔をさらに算出し、
前記合成開口処理手段は、前記受信信号が得られた位置および前記受信信号が得られた時間間隔に基づいて、当該受信信号の合成開口処理を行うことを特徴とする、請求項2に記載の車載用レーダ装置。 - 前記車両情報算出手段は、前記車両の車両情報を用いて、さらに前記受信信号がそれぞれ得られた前記車両の向きを示す情報を算出し、
前記記憶手段は、前記受信信号が得られた車両の向きを示す情報と共に当該受信信号を記憶し、
前記合成開口処理手段は、前記受信信号が得られた車両の向きから得られる前記電磁波を照射した方向および前記受信信号が得られた位置に基づいて、当該受信信号の合成開口処理を行うことを特徴とする、請求項1または3に記載の車載用レーダ装置。 - 前記車両情報算出手段は、前記車両の車両情報を用いて、前記車両が移動した軌跡を示す情報を前記車両の移動に関する情報として算出し、
前記記憶手段は、前記車両が移動した軌跡を示す情報を第1の軌跡として前記受信信号と共に記憶し、
前記合成開口処理手段は、前記第1の軌跡と前記受信信号とから第2の軌跡を算出し、当該第2の軌跡上の異なる位置で前記受信信号がそれぞれ得られたものと想定して当該受信信号の合成開口処理を行うことを特徴とする、請求項1に記載の車載用レーダ装置。 - 前記合成開口処理手段は、前記記憶手段に記憶されている前記受信信号のうち、予め定められた数だけ用いて合成開口処理を行うことを特徴とする、請求項1に記載の車載用レーダ装置。
- 前記合成開口処理手段は、合成開口処理に用いる前記受信信号の数を予め定められた条件に従い増減することを特徴とする、請求項1に記載の車載用レーダ装置。
- 前記合成開口処理手段は、前記合成開口処理を行うことによって前記車両周辺の物体を検出する処理をさらに行うことを特徴とする、請求項1に記載の車載用レーダ装置。
- 前記検出手段は、前記車両の前方および後方の少なくとも一方に搭載されることを特徴とする、請求項1に記載の車載用レーダ装置。
- 前記合成開口処理手段が検出した物体と前記車両とが接触する危険性を判断する判定手段をさらに備えることを特徴とする、請求項7に記載の車載用レーダ装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/390,804 US8866664B2 (en) | 2009-09-25 | 2009-09-25 | Vehicle-mounted radar device |
| PCT/JP2009/004862 WO2011036721A1 (ja) | 2009-09-25 | 2009-09-25 | 車載用レーダ装置 |
| JP2011532803A JP5418794B2 (ja) | 2009-09-25 | 2009-09-25 | 車載用レーダ装置 |
| DE112009005279T DE112009005279T5 (de) | 2009-09-25 | 2009-09-25 | Fahrzeugseitige radarvorrichtung |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2009/004862 WO2011036721A1 (ja) | 2009-09-25 | 2009-09-25 | 車載用レーダ装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2011036721A1 true WO2011036721A1 (ja) | 2011-03-31 |
Family
ID=43795494
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2009/004862 WO2011036721A1 (ja) | 2009-09-25 | 2009-09-25 | 車載用レーダ装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8866664B2 (ja) |
| JP (1) | JP5418794B2 (ja) |
| DE (1) | DE112009005279T5 (ja) |
| WO (1) | WO2011036721A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016118406A (ja) * | 2014-12-18 | 2016-06-30 | パナソニックIpマネジメント株式会社 | レーダ装置及びレーダ状態推定方法 |
| WO2022249533A1 (ja) * | 2021-05-25 | 2022-12-01 | ソニーグループ株式会社 | 情報処理装置、キャリブレーションシステム及び情報処理方法 |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015037173A1 (ja) * | 2013-09-12 | 2015-03-19 | パナソニック株式会社 | レーダ装置、車両及び移動体速度検出方法 |
| FR3013849B1 (fr) | 2013-11-26 | 2015-11-27 | Thales Sa | Radar anticollision, notamment pour un aeronef au roulage et systeme anticollision |
| DE102015201828A1 (de) | 2015-02-03 | 2016-08-04 | Conti Temic Microelectronic Gmbh | Bestimmen von Höheninformationen von Objekten in der Umgebung eines Fahrzeugs |
| US9903945B2 (en) * | 2015-02-04 | 2018-02-27 | GM Global Technology Operations LLC | Vehicle motion estimation enhancement with radar data |
| DE102015202230A1 (de) | 2015-02-09 | 2016-08-11 | Conti Temic Microelectronic Gmbh | Fusionierte Eigenbewegungsberechnung für ein Fahrzeug |
| JP6421935B2 (ja) * | 2015-03-31 | 2018-11-14 | パナソニックIpマネジメント株式会社 | 車両移動推定装置および車両移動推定方法 |
| JP6838658B2 (ja) * | 2017-07-04 | 2021-03-03 | 日本電気株式会社 | 物体検知装置、物体検知方法、及びプログラム |
| DE102018124215A1 (de) * | 2018-10-01 | 2020-04-02 | Conti Temic Microelectronic Gmbh | Verfahren zur Erfassung von Umgebungsinformationen mittels mehrerer Radarsensoren |
| CN112180372A (zh) * | 2020-08-19 | 2021-01-05 | 福瑞泰克智能系统有限公司 | 一种基于双角雷达的目标检测方法、装置和雷达系统 |
| EP4177635A1 (en) * | 2021-11-05 | 2023-05-10 | GM Cruise Holdings LLC | Automotive radar for mapping and localization |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001141812A (ja) * | 1999-11-16 | 2001-05-25 | Nec Corp | Fm−cwレーダ装置 |
| JP2007033258A (ja) * | 2005-07-27 | 2007-02-08 | Nec Corp | 被観測対象物の観測方法及び装置 |
| JP2007199085A (ja) * | 2007-04-13 | 2007-08-09 | Mitsubishi Electric Corp | ミリ波レーダ装置 |
| WO2008029038A1 (fr) * | 2006-09-07 | 2008-03-13 | Renault S.A.S. | Dispositif et procede d'estimation des dimensions d'une place de parking, vehicule automobile comportant un tel dispositif |
| JP2009019952A (ja) * | 2007-07-11 | 2009-01-29 | Mitsubishi Electric Corp | 移動目標検出装置 |
| JP2009128019A (ja) * | 2007-11-20 | 2009-06-11 | Mitsubishi Electric Corp | 合成開口レーダ画像再生装置、合成開口レーダ画像再生方法及び合成開口レーダ画像再生プログラム |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USRE31254E (en) * | 1978-08-28 | 1983-05-24 | Sanders Associates, Inc. | Self calibration of a LORAN-C navigation receiver |
| JPS61201180A (ja) | 1985-03-05 | 1986-09-05 | Nec Corp | 合成開口レ−ダ画像処理装置 |
| JPH0758331B2 (ja) | 1987-06-08 | 1995-06-21 | 三菱電機株式会社 | 地中埋設物探査方式 |
| US5057833A (en) * | 1989-11-07 | 1991-10-15 | Otl, Inc. | Passive optical air traffic alert system |
| JPH09230039A (ja) | 1996-02-27 | 1997-09-05 | Mitsubishi Electric Corp | 干渉型合成開口レーダ装置及び合成開口レーダ装置を用いた地形高さ測定方法 |
| JP2856186B2 (ja) | 1997-01-22 | 1999-02-10 | 日本電気株式会社 | 合成開口レーダシステム、その情報処理装置および方法 |
| SE513210C2 (sv) * | 1998-10-30 | 2000-07-31 | Ericsson Telefon Ab L M | Förfarande för att fastställa rörelsedata för objekt |
| US7068211B2 (en) * | 2000-02-08 | 2006-06-27 | Cambridge Consultants Limited | Methods and apparatus for obtaining positional information |
| DE10225894A1 (de) | 2002-06-11 | 2004-02-05 | Robert Bosch Gmbh | Verfahren zur Bestimmung eines Abstandes zwischen zwei im Wesentlichen in einer Ebene sich befindenden Gegenständen auf Basis synthetischer Apertur |
| US6992581B2 (en) * | 2003-07-16 | 2006-01-31 | Dmatek Ltd. | Method and apparatus for attenuating of a broadcasting received signal for achieving a better distance resolution in monitoring systems |
| US7639171B2 (en) * | 2007-09-27 | 2009-12-29 | Delphi Technologies, Inc. | Radar system and method of digital beamforming |
| WO2009110096A1 (ja) * | 2008-03-07 | 2009-09-11 | 独立行政法人海洋研究開発機構 | 合成開口処理システム及び合成開口処理方法 |
| US7948439B2 (en) * | 2008-06-20 | 2011-05-24 | Honeywell International Inc. | Tracking of autonomous systems |
| US8462043B2 (en) * | 2011-06-12 | 2013-06-11 | John Belcea | Method for detecting radar signals affected by interference |
-
2009
- 2009-09-25 DE DE112009005279T patent/DE112009005279T5/de not_active Ceased
- 2009-09-25 US US13/390,804 patent/US8866664B2/en not_active Expired - Fee Related
- 2009-09-25 WO PCT/JP2009/004862 patent/WO2011036721A1/ja active Application Filing
- 2009-09-25 JP JP2011532803A patent/JP5418794B2/ja not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001141812A (ja) * | 1999-11-16 | 2001-05-25 | Nec Corp | Fm−cwレーダ装置 |
| JP2007033258A (ja) * | 2005-07-27 | 2007-02-08 | Nec Corp | 被観測対象物の観測方法及び装置 |
| WO2008029038A1 (fr) * | 2006-09-07 | 2008-03-13 | Renault S.A.S. | Dispositif et procede d'estimation des dimensions d'une place de parking, vehicule automobile comportant un tel dispositif |
| JP2007199085A (ja) * | 2007-04-13 | 2007-08-09 | Mitsubishi Electric Corp | ミリ波レーダ装置 |
| JP2009019952A (ja) * | 2007-07-11 | 2009-01-29 | Mitsubishi Electric Corp | 移動目標検出装置 |
| JP2009128019A (ja) * | 2007-11-20 | 2009-06-11 | Mitsubishi Electric Corp | 合成開口レーダ画像再生装置、合成開口レーダ画像再生方法及び合成開口レーダ画像再生プログラム |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016118406A (ja) * | 2014-12-18 | 2016-06-30 | パナソニックIpマネジメント株式会社 | レーダ装置及びレーダ状態推定方法 |
| WO2022249533A1 (ja) * | 2021-05-25 | 2022-12-01 | ソニーグループ株式会社 | 情報処理装置、キャリブレーションシステム及び情報処理方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2011036721A1 (ja) | 2013-02-14 |
| US20120169532A1 (en) | 2012-07-05 |
| DE112009005279T5 (de) | 2013-01-03 |
| JP5418794B2 (ja) | 2014-02-19 |
| US8866664B2 (en) | 2014-10-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5418794B2 (ja) | 車載用レーダ装置 | |
| JP5505427B2 (ja) | 衝突位置予測装置 | |
| JP5003674B2 (ja) | レーダ装置および移動体 | |
| JP5316549B2 (ja) | 物体認識装置および物体認識方法 | |
| JP5626224B2 (ja) | 障害物検出装置 | |
| US20090237293A1 (en) | Recognition system for vehicle | |
| JP2014006123A (ja) | 物体検出装置、情報処理装置、物体検出方法 | |
| JP6323064B2 (ja) | 走行車線識別装置、車線変更支援装置、走行車線識別方法 | |
| Kishida et al. | 79 GHz-band high-resolution millimeter-wave radar | |
| EP3690484B1 (en) | Radar device and target detection method | |
| JP3733914B2 (ja) | 車両の物体検出装置,車両の安全制御方法,自動車 | |
| EP2026096B1 (en) | Object-detection device for vehicle | |
| CN112654888A (zh) | 电子设备、电子设备的控制方法、以及电子设备的控制程序 | |
| KR102172071B1 (ko) | 물체 분류로 자동차의 주변 영역을 포착하는 방법, 제어 장치, 운전자 보조 시스템, 및 자동차 | |
| JP2014006122A (ja) | 物体検出装置 | |
| WO2019116548A1 (ja) | レーダ信号処理装置、レーダ装置およびレーダ信号処理方法 | |
| JP5495143B2 (ja) | レーダ装置 | |
| JP6927132B2 (ja) | 運転支援システムおよび方法 | |
| JP5590777B2 (ja) | レーダ装置 | |
| JP2009282760A (ja) | 車両制御装置 | |
| JP6943347B2 (ja) | レーダ装置、車両および物体位置検出方法 | |
| EP3816668A1 (en) | Vehicle control device and vehicle control method | |
| JP2011247761A (ja) | 物体検知装置 | |
| JP2008304210A (ja) | 車両ホイール用ループアンテナおよびそれを用いた車両側方認識装置 | |
| WO2020070908A1 (ja) | 検知装置、移動体システム、及び検知方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 09849752 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2011532803 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 13390804 Country of ref document: US |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 1120090052797 Country of ref document: DE Ref document number: 112009005279 Country of ref document: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 09849752 Country of ref document: EP Kind code of ref document: A1 |