WO2010110384A1 - 計測装置および計測方法 - Google Patents
計測装置および計測方法 Download PDFInfo
- Publication number
- WO2010110384A1 WO2010110384A1 PCT/JP2010/055264 JP2010055264W WO2010110384A1 WO 2010110384 A1 WO2010110384 A1 WO 2010110384A1 JP 2010055264 W JP2010055264 W JP 2010055264W WO 2010110384 A1 WO2010110384 A1 WO 2010110384A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- magnetic field
- measurement
- measurement object
- moving
- image signal
- Prior art date
Links
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/4808—Multimodal MR, e.g. MR combined with positron emission tomography [PET], MR combined with ultrasound or MR combined with computed tomography [CT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/055—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves involving electronic [EMR] or nuclear [NMR] magnetic resonance, e.g. magnetic resonance imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/563—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution of moving material, e.g. flow contrast angiography
- G01R33/56375—Intentional motion of the sample during MR, e.g. moving table imaging
- G01R33/56383—Intentional motion of the sample during MR, e.g. moving table imaging involving motion of the sample as a whole, e.g. multistation MR or MR with continuous table motion
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/565—Correction of image distortions, e.g. due to magnetic field inhomogeneities
- G01R33/56509—Correction of image distortions, e.g. due to magnetic field inhomogeneities due to motion, displacement or flow, e.g. gradient moment nulling
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/60—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using electron paramagnetic resonance
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/38—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field
- G01R33/3806—Open magnet assemblies for improved access to the sample, e.g. C-type or U-type magnets
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/445—MR involving a non-standard magnetic field B0, e.g. of low magnitude as in the earth's magnetic field or in nanoTesla spectroscopy, comprising a polarizing magnetic field for pre-polarisation, B0 with a temporal variation of its magnitude or direction such as field cycling of B0 or rotation of the direction of B0, or spatially inhomogeneous B0 like in fringe-field MR or in stray-field imaging
Definitions
- the present invention is to obtain an image such as a functional image or a morphological image of an object to be measured using various magnetic resonances such as electron spin resonance (ESR) and nuclear magnetic resonance (NMR).
- ESR electron spin resonance
- NMR nuclear magnetic resonance
- the present invention relates to a measuring device and a measuring method.
- Redox metabolism including active oxygen and free radicals is closely involved in many physiological phenomena and disease causes / progress. Therefore, there is no doubt that if redox dynamics in experimental small animals can be visualized at the individual level, it will greatly contribute to the elucidation of life phenomena, analysis of diseases and the establishment of treatments, and development of pharmaceuticals.
- ESRI electron spin resonance imaging
- MRI nuclear magnetic resonance imaging
- the overhauser effect is a phenomenon in which the electron spin of a free radical undergoes ESR transition, and the nuclear spin is polarized by the dipole interaction between the electron spin and the nuclear spin.
- OMRI is an imaging method in which MRI measurement is performed by exciting electron spins of free radicals and then polarizing hydrogen nucleus spins of water molecules.
- the nuclear spin polarization is enhanced by 330 times at maximum (theoretical value) compared to the normal Boltzmann distribution of nuclear spins. That is, the sensitivity can be increased by 330 times (theoretical value) as compared with normal MRI measurement.
- the living body measuring apparatus includes a first magnetic field generating unit that generates a magnetic field of a predetermined magnitude, a second magnetic field generating unit that generates a magnetic field larger than the magnetic field of the first magnetic field generating unit, and a living body to be measured.
- a linear movement means for linearly moving between the first and second magnetic field generation means in synchronization with the irradiation of the RF pulse, and a measurement target living body based on a signal detected in response to the RF pulse by stopping the measurement target living body Measurement processing means for measuring a tissue image inside.
- the first magnetic field generation means is used as an ESRI external magnetic field generation apparatus and a PEDRI (OMRI) electron spin excitation apparatus
- the second magnetic field generation means is used as an MRI and OMRI external magnetic field generation apparatus.
- the time-varying image of the radical amount can be obtained by OMRI
- the qualitative change image can be obtained by spectrum / space four-dimensional ESRI / MRI
- the magnetic field by the second external magnetic field generating means can be increased. High resolution images can be obtained.
- this living body measuring apparatus the measurement target living body is repeatedly moved by the linear moving means installed between the first and second magnetic field generating means, and is measured after being stopped. A large acceleration is generated. Therefore, this biometric apparatus has a problem that a large load is applied to a moving measurement target living body.
- the present applicant is developing a measuring device that can eliminate the load on the measuring object by measuring the measuring object moving between the plurality of magnetic field generating means without stopping.
- the measurement object is measured without stopping, there is a problem that the measurement image is affected by the moving speed and the measurement image is shifted.
- the present invention eliminates the influence of the moving speed of a moving measuring object in a measuring apparatus and a measuring method for obtaining a measuring image such as a functional image or a morphological image of the measuring object using magnetic resonance.
- the purpose is to obtain a simple measurement image.
- the measuring device of the present invention is a measuring device for obtaining an image of a measurement object using magnetic resonance, and a magnetic field generating means for generating a magnetic field for exciting magnetic resonance of the measurement object, and a measurement object
- a moving means for moving the object to be measured in the magnetic field of the magnetic field generating means by moving the object or the magnetic field generating means, and movement of the measuring object with respect to the magnetic field generating means without stopping during movement by the moving means
- Measurement that obtains a measurement image signal in a measurement object by applying a gradient magnetic field to one or both of the direction y and the direction x orthogonal to the moving direction y, and either or both of phase encoding and frequency encoding
- correction means for obtaining a corrected image signal obtained by correcting the influence of movement in the y direction with respect to the measurement image signal.
- the measurement method of the present invention is a measurement method for obtaining an image of a measurement object using magnetic resonance, and generates a magnetic field for exciting the measurement object or the magnetic resonance of the measurement object.
- the generation means By moving the generation means, the measurement object is moved in the magnetic field of the magnetic field generation means, and the movement direction y of the measurement object with respect to the magnetic field generation means without stopping during the movement of the measurement object or the magnetic field generation means
- obtaining a measurement image signal in the measurement object by applying a gradient magnetic field to one or both of the direction x orthogonal to the moving direction y and applying either or both of phase encoding and frequency encoding, It includes obtaining a corrected image signal in which the influence of movement in the y direction is corrected for the image signal.
- a corrected image signal in which the influence of the movement of the measurement object in the movement direction y on the magnetic field generating means is corrected even when the measuring object or the magnetic field generating means is moving by the moving means can be obtained.
- an accurate measurement image such as a functional image or a morphological image of the measurement object without deviation.
- the corrected image signal is expressed as follows when the measurement image signal is S (k x , k y ) and the corrected image signal is S ′ (k x , k y ).
- k x, k y are the x and y directions of the spatial frequency
- gamma is the gyromagnetic ratio
- G y (n) is the gradient strength of the phase encoding or frequency encoding in the n-th measurement
- v y is the y-direction It is desirable that ⁇ t y be a phase encoding or frequency encoding application time, and t y0 be a phase encoding or frequency encoding application time.
- the corrected image signal S ′ (k x , k y) in which the influence of the movement in the y direction determined by the moving speed in the y direction, the application time of the phase encoding or the frequency encoding, and the time until the application of the phase encoding or the frequency encoding is corrected. ) Is obtained, it is possible to obtain an accurate measurement image such as a functional image and a morphological image of the measurement object without deviation, particularly a two-dimensional accurate measurement image.
- v y is the moving speed
- t y0 is desirably one obtained by a time until the application of the phase encoding or frequency encoding.
- the corrected image signal S ′ (k x , k y) in which the influence of the movement in the y direction determined by the moving speed in the y direction, the application time of the phase encoding or the frequency encoding, and the time until the application of the phase encoding or the frequency encoding is corrected.
- K z it is possible to obtain an accurate measurement image such as a functional image and a morphological image of the measurement object without deviation, particularly a three-dimensional accurate measurement image.
- the magnetic field generating means includes a first magnetic field generating means for generating a predetermined magnitude, and a second magnetic field generating means for generating a magnetic field having a magnitude different from the magnetic field of the first magnetic field generating means.
- the moving means moves the measurement object in sequence in the magnetic field of the first and second magnetic field generating means by moving the measurement object or the first and second magnetic field generating means. It is desirable that
- magnetic fields of different magnitudes are generated by a plurality of magnetic field generating means, and various magnetic fields such as electron spin resonance and nuclear magnetic resonance are sequentially passed through the measurement object through the magnetic fields of the plurality of magnetic field generating means.
- resonance it is possible to obtain an accurate measurement image without deviation of a functional image or a tissue image in the measurement object.
- the moving unit rotates and moves the measurement object or the first and second magnetic field generation units to sequentially pass the measurement object through the magnetic fields of the first and second magnetic field generation units. It is desirable to be a means.
- the object to be measured or the first and second magnetic field generating means are rotated and moved while the object to be measured is sequentially passed through the magnetic fields of the plurality of magnetic field generating means.
- Examples of the measurement object of the present invention include a biological body (living body) and an object other than living organisms (for example, a semiconductor).
- a biological function image such as a redox dynamic image or metabolic image as a functional image, or a tissue image (such as 13 C, 1 H, or 31 P nucleus) as a morphological image.
- a measurement image can be obtained.
- an accurate measurement image without a deviation such as a morphological image of a structure or a defect or a distribution image of constituent compounds can be obtained.
- one of the first or second magnetic field generation means is for exciting and measuring nuclear magnetic resonance, and the other is for exciting electron spin resonance. It is desirable that it is for measuring. Thereby, an accurate biological redox dynamic image without deviation can be obtained by OMRI.
- the first and second magnetic field generating means may generate either a large magnetic field, but the second magnetic field generating means generates a magnetic field larger than the magnetic field of the first magnetic field generating means.
- the first magnetic field generating means having a low magnetic field can be used as an OMRI electron spin excitation device
- the second magnetic field generating means having a high magnetic field can be used as an external magnetic field generating device for MRI and OMRI.
- an MRI image and an OMRI image are obtained in the second magnetic field generating means.
- the external magnetic field of the OMRI is very large. Thus, an accurate OMRI image without high sensitivity and high resolution can be obtained.
- the first magnetic field generating means when the first magnetic field generating means generates a magnetic field larger than the magnetic field of the second magnetic field generating means, the first magnetic field generating means which is a high magnetic field is used as an external magnetic field generating apparatus for MRI.
- the second magnetic field generation means that is a magnetic field can be used as an external magnetic field generation apparatus for OMRI.
- the first or second magnetism generating unit excites and measures the magnetic resonance, so that various magnetic resonances such as electron spin resonance and nuclear magnetic resonance are performed.
- various magnetic resonances such as electron spin resonance and nuclear magnetic resonance are performed.
- the measurement object is moved in the magnetic field of the magnetic field generation means by moving the measurement object or the magnetic field generation means for generating a magnetic field for exciting magnetic resonance of the measurement object, and the measurement object
- phase encoding is performed by applying a gradient magnetic field to one or both of the moving direction y of the measurement object with respect to the magnetic field generating means and the direction x orthogonal to the moving direction y without stopping during movement of the magnetic field generating means.
- / or frequency encoding to obtain a measurement image signal in the measurement object, and obtain a corrected image signal in which the influence of movement in the y direction is corrected for the measurement image signal.
- the corrected image signal is an expression
- the measurement object with no deviation corrected for the influence of movement in the y direction determined by the movement speed in the y direction, the application time of phase encoding or frequency encoding, and the time until application of phase encoding or frequency encoding. It is possible to obtain an accurate measurement image such as a functional image or a morphological image of an object, particularly a two-dimensional accurate measurement image.
- the corrected image signal is an expression The measurement object with no deviation corrected for the influence of movement in the y direction determined by the movement speed in the y direction, the application time of phase encoding or frequency encoding, and the time until application of phase encoding or frequency encoding. It is possible to obtain an accurate measurement image such as a functional image or a morphological image of an object, particularly a three-dimensional accurate measurement image.
- the moving means moves the measurement object or the first and second magnetic field generation means to move the measurement object in the magnetic fields of the first and second magnetic field generation means in order.
- Rotation by which the moving means rotates the measurement object or the first and second magnetic field generation means to sequentially pass the measurement object through the magnetic fields of the first and second magnetic field generation means Since it is a moving means, it is not necessary to repeatedly move the measurement object, and various rotations such as electron spin resonance and nuclear magnetic resonance while rotating the measurement object or the first and second magnetic field generation means without stopping. Using magnetic resonance, an accurate function or morphological image can be obtained without any deviation of the measurement object. As a result, it is possible to eliminate the load generated by temporarily stopping during the repeated movement during measurement as in the prior art, and the first and second magnetic field generating means may be subjected to the load generated by stopping. Absent.
- One of the first or second magnetic field generating means is for exciting nuclear magnetic resonance, and the other is for exciting electron spin resonance. An accurate biological redox dynamic image can be obtained.
- the first magnetic field generating means having a low magnetic field is used as an OMRI electron spin excitation device, Since the second magnetic field generating means that is a high magnetic field can be used as an external magnetic field generating device for MRI and OMRI, the external magnetic field of OMRI becomes very large, and an accurate OMRI image without deviation of high sensitivity and high resolution can be obtained. Obtainable.
- the first magnetic field generating means When the first magnetic field generating means generates a magnetic field larger than the magnetic field of the second magnetic field generating means, the first magnetic field generating means that is a high magnetic field is used as an external magnetic field generating apparatus for MRI. Since the second magnetic field generating means having a low magnetic field can be used as an external magnetic field generating apparatus for OMRI, it is possible to obtain an accurate OMRI image without a high sensitivity shift.
- FIG. 5 is a diagram schematically illustrating a phase-encoded gradient magnetic field strength G y (n) applied to a measurement target living body when measurement is performed according to the measurement sequence of FIG. 4. It is a figure which shows another example of a measurement sequence.
- FIG. 7 is a diagram schematically illustrating a phase-encoded gradient magnetic field strength G y (n) applied to a measurement target living body when measurement is performed according to the measurement sequence of FIG. 6.
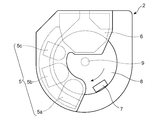
- FIG. 1 is a schematic configuration diagram of a measuring device according to an embodiment of the present invention
- FIG. 2 is a perspective view of a main body of the measuring device of FIG. 1
- FIG. 3 is a plan view.
- a measuring apparatus 1 according to an embodiment of the present invention measures a living body as a measurement target, and a main body that performs measurement by placing a measuring target living body (a mouse M in the illustrated example). 2, a control unit 3 that performs operation control of each unit of the main body unit 2, and a display unit 4 that displays processing results of the control unit 3 and the like.
- the main body 2 includes a first external magnetic field generator 5 for low magnetic field as first magnetic field generating means, a second external magnetic field generator 6 for high magnetic field as second magnetic field generating means, and a cylinder. And a rotary table 8 as a rotational movement means that rotates around a vertical axis.
- the rotary table 8 is rotationally driven by a rotary drive mechanism 9 (see FIG. 3) configured by a motor, a pulley, a belt, and the like.
- the RF coil 7 is fixed on the periphery of the turntable 8.
- the living body to be measured is held in the RF coil 7 and rotates along with the rotary table 8 so that it sequentially passes through the magnetic fields of the first external magnetic field generator 5 and the second external magnetic field generator 6. ing.
- the rotary table 8 rotates clockwise.
- the RF coil 7 forms an electromagnetic field in a direction perpendicular to the static magnetic field of the first external magnetic field generator 5 and the second external magnetic field generator 6.
- the first external magnetic field generator 5 includes three external magnetic field generators 5a, 5b, and 5c.
- Each of the first external magnetic field generators 5a, 5b, and 5c includes a permanent magnet 50, a gradient magnetic field coil 51, and a magnetic field sweep coil 52.
- the first external magnetic field generator 5 provides an OMRI excitation magnetic field in the space through which the RF coil 7 on the rotary table 8 passes.
- the first external magnetic field generator 5 excites the free-radical electron spin of the living body to be measured held in the RF coil 7 for the OMRI measurement in the second external magnetic field generator 6.
- the second external magnetic field generator 6 has a permanent magnet 60 for generating a static magnetic field in the space through which the RF coil 7 on the rotary table 8 passes. Further, a gradient magnetic field coil 61 is installed, and a gradient magnetic field of a predetermined scale corresponding to a predetermined MR pulse sequence is generated a predetermined number of times in the static magnetic field generated by the permanent magnet 60.
- the second external magnetic field generator 6 provides an external static magnetic field for MRI / OMRI. In the second external magnetic field generator 6, MRI measurement and OMRI measurement are performed.
- the first external magnetic field generation device 5 is connected to the control unit 3 through the first static magnetic field generation driver 10.
- the first static magnetic field generation driver 10 is connected to a power source (not shown) for supplying power to the gradient magnetic field coil 51 and the magnetic field sweep coil 52.
- the first static magnetic field generation driver 10 controls the gradient magnetic field coil 51 and the magnetic field sweep coil 52 according to a command from the control unit 3.
- the magnetic field strength of the first external magnetic field generator 5 in this embodiment is 20 mT, but this magnetic field strength can be arbitrarily set within the range of 0 to 50 mT or less for OMRI and 0 to 11 T or less for MRI. Is possible. Further, it is possible to use an electromagnet instead of the permanent magnet 60.
- the second external magnetic field generator 6 is connected to the control unit 3 via the second static magnetic field generation driver 11.
- a power source (not shown) for supplying power to the gradient magnetic field coil 61 is connected to the second static magnetic field generation driver 11.
- the second static magnetic field generation driver 11 drives the gradient magnetic field coil 61 according to a command from the control unit 3.
- the magnetic field strength of the second external magnetic field generation device 6 in the present embodiment is 1.5T, but this magnetic field strength can be arbitrarily set to be more than 0 and 11T or less, and is preferably larger.
- the permanent magnet 60 is used. However, in the case of the permanent magnet 60, the magnetic field strength can be increased to about 2T. Further, a superconducting magnet can be used in place of the permanent magnet 60. When a superconducting magnet is used instead of the permanent magnet 60, it can be increased to about 11T.
- the RF coil 7 is connected to the control unit 3 via the RF coil driver 12 and the detection signal receiving unit 13. Further, the rotation drive mechanism 9 shown in FIG. 3 is connected to the control unit 3 via the rotation drive mechanism driver 14 shown in FIG. A power source (not shown) for supplying power to the RF coil 7 and the rotation drive mechanism 9 is connected to the RF coil driver 12 and the rotation drive mechanism driver 14, respectively.
- the RF coil driver 12 and the rotation drive mechanism driver 14 drive the RF coil 7 and the rotation drive mechanism 9 according to the sequence commanded from the control unit 3.
- the RF coil driver 12 synchronizes with the rotary drive driver 10 so that the RF coil 7 rotates and moves together with the rotary table 8 and is in the magnetic field of the first external magnetic field generator 5 and the second external magnetic field generator 6.
- the RF coil 7 is driven at the timing of passing through. When a high frequency pulse is applied to the RF coil 7, a high frequency magnetic field is generated in the RF coil 7, and the living body to be measured is exposed to the high frequency magnetic field.
- the electron spin resonance signal received by the RF coil 7 in the first external magnetic field generator 5 and the magnetic resonance signal received by the RF coil 7 in the second external magnetic field generator 6 are respectively received as detection signals.
- the data is received by the unit 13 and passed to the control unit 3.
- the drive time from the first external magnetic field generator 5 to the second external magnetic field generator 6 is preferably within 1 second, more preferably within 0.7 seconds, and in this embodiment 0 Set to 5 seconds.
- control unit 3 includes a measurement sequence processing unit 30, an OMRI measurement processing unit 31, an MRI measurement processing unit 32, and a measurement signal correction unit that obtain an electron spin resonance signal and a magnetic resonance signal of a measurement target living body according to the measurement sequence. 33 is provided.
- the measurement sequence control unit 30 includes a power supply sequence for the first external magnetic field generation device 5, the second external magnetic field generation device 6, the RF coil 7 and the rotation drive mechanism 9, and a measurement sequence in the RF coil 7.
- the first external magnetic field generator 5, the second external magnetic field generator 6, the RF coil 7, and the rotation drive mechanism 9 are controlled.
- the control unit 3 actually comprises a computer system, and functions as described above by executing a computer program stored in a recording medium such as a hard disk.
- the OMRI measurement processing unit 31 and the MRI measurement processing unit 32 are measurement units that perform image processing based on the electron spin resonance signal and the magnetic resonance signal obtained according to the measurement sequence and obtain a measurement image signal.
- the measurement signal correction unit 33 is a correction unit that obtains a corrected image signal obtained by correcting the measurement image signal obtained by the OMRI measurement processing unit 31 and the MRI measurement processing unit 32 to correct the influence of movement.
- the corrected image signal obtained by the measurement signal correcting unit 33 is displayed on the display device 4.
- the measurement image signal correction processing by the measurement signal correction unit 33 will be described in detail.
- a measurement image signal in the measurement target living body is obtained by applying a gradient magnetic field to one or both of the directions x orthogonal to the moving direction y and applying either or both of phase encoding and frequency encoding.
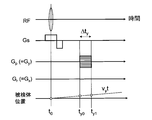
- FIG. 4 shows a measurement sequence in a case where a measurement image signal in a measurement target living body is obtained by applying a gradient magnetic field in a direction x orthogonal to the moving direction y and by phase encoding.
- the gradient magnetic field G s is applied at the same time (t 0 ) as the application of the RF pulse, and then the phase encode pulse G p is applied between t y0 and t y1 for measurement.
- An image signal is obtained.
- FIG. 5 is a diagram schematically showing the phase-encoded gradient magnetic field strength G y (n) applied to the measurement target living body when measurement is performed by this measurement sequence.
- v y is the moving speed of the moving direction y of the measurement object vivo. Since the measurement target living body does not move in the x direction, v x is 0.
- Superscript (n) indicates that the value of G y is gradually increased every Measurement (scan).
- the magnetization signal S (k x , k y ) encoded by the gradient magnetic field is It becomes.
- k x and k y are spatial frequencies
- ⁇ (x, y) is a magnetization density.
- ⁇ is the magnetic rotation ratio
- ⁇ is time
- y ′ is introduced by the following equation (4) to perform coordinate conversion.
- Equation (6) is It becomes.
- This equation (8) indicates that the movement of the measurement target living body in the y direction appears as the movement of the measurement image in the y direction.
- Table 1 shows an example of calculating the shift amount on the actual measurement image from the equation (8). The parameters necessary for this calculation are the moving speed v y in the y direction, the phase encoding application time ⁇ t y , and the time t y0 until the phase encoding application. As can be seen from Table 1, the shift amount (calculated value) calculated by the equation (8) almost coincides with the actually measured value.
- the measurement signal correcting unit 33 obtains the corrected image signal S ′ (k x , k y ) from the measurement image signal S (k x , k y ) by using this equation (10). This calculation corresponds to phase rotation.
- a small animal such as a mouse M
- the RF coil 7 on the rotary table 8.
- a spatial image analysis is performed on a brain function in a redox metabolism abnormality due to an oxidative stress disease or a schizophrenia in a measurement target living body.
- the rotary drive mechanism 9 is driven to rotate the rotary table 8, and the mouse M is sequentially passed through the magnetic fields of the first external magnetic field generator 5 and the second external magnetic field generator 6.
- the first external magnetic field generator 5 irradiates a high frequency from the RF coil 7 and drives the magnetic field sweep coil 52 to sweep the static magnetic field at a high speed.
- the unpaired electrons in the mouse M absorb the high frequency, and the electron spin is resonantly excited.
- the mouse M that has passed through the first external magnetic field generator 5 then enters the second external magnetic field generator 6 and is placed in a very strong static magnetic field of 1 T or more, in this embodiment, 1.5 T.
- the electron spin resonance-excited in the first external magnetic field generator 5 causes an energy transition to the nuclear spin.
- a signal obtained from the mouse M by high frequency irradiation is received by the detection signal receiving unit 13.
- the signal received by the detection signal receiving unit 13 in this way is received by the control unit 3 and processed by the OMRI measurement processing unit 31 and the MRI measurement processing unit 32.
- the MRI measurement processing unit 32 synthesizes an MRI image by processing a signal obtained from the RF coil 7 in the second external magnetic field generator 5.
- the OMRI measurement processing unit 31 synthesizes an image showing the nuclear spin distribution by processing a signal obtained from the second external magnetic field generator 5.
- the measurement image signal obtained by the MRI measurement processing unit 32 and the OMRI measurement processing unit 31 is corrected by the measurement signal correction unit 33 described above, and the corrected image signal obtained by the measurement signal correction unit 33 is displayed. It is displayed on the device 4.
- the influence of the movement in the y direction on the measurement image signal S (k x , k y ) obtained by the MRI measurement processing unit 32 and the OMRI measurement processing unit 31 is affected. Since the corrected corrected image signal S ′ (k x , k y ) is obtained, even when the mouse M is moving by the rotary table 8, the influence of the moving speed of the moving mouse M is eliminated, and there is no deviation. An MRI image and an OMRI image of a mouse M can be obtained.
- the first external magnetic field generation device 5 and the second external magnetic field generation device 6 generate magnetic fields of different magnitudes, and the mouse M is rotated by the rotary table 8. It is possible to obtain an accurate MRI image and OMRI image without deviation while passing the mouse M sequentially through the magnetic fields of the first and second external magnetic field generators 5 and 6. Therefore, the mouse M is not repeatedly moved as in the prior art, and no load is applied during movement and stop.
- the first external magnetic field generator 5 having a low magnetic field is used as an OMRI electron spin excitation apparatus, and the second external magnetic field generator 5 having a high magnetic field is generated by an MRI and an OMRI external magnetic field. It is used as a device. Therefore, in this measuring apparatus 1, since the OMRI measurement is performed by the second external magnetic field generator 6 having a high magnetic field after the electron spin is excited by the first external magnetic field generator 5 having a low magnetic field, the external of the OMRI is performed. The magnetic field becomes very large, and it is possible to obtain an accurate OMRI image without high sensitivity and high resolution.
- the second external magnetic field generator 6 having a high magnetic field can be used as an MRI external magnetic field generator
- the first external magnetic field generator having a low magnetic field can be used as an OMRI external magnetic field generator.
- an MRI image is obtained by the second external magnetic field generator 6 and an OMRI image is obtained by the first external magnetic field generator 5.
- the mouse M is rotationally moved by the rotary table 8.
- the first and second external devices are not rotated by moving the mouse M on the contrary.
- the magnetic field generators 5 and 6 are rotationally moved. In this case, since the moving direction y of the mouse M with respect to the first and second external magnetic field generators 5 and 6 does not change, correction by the measurement signal correction unit 33 can be performed as described above.
- the mouse M since the mouse M remains stationary, it does not feel uncomfortable during measurement, and a measurement device that is gentle on the living body can be realized.
- the first and second external magnetic field generators 5 and 6 do not have to be repeatedly moved, so that the first and second external magnetic field generators 5 and 5 are moved and stopped. No load due to movement is applied to 6.
- the measurement apparatus 1 in the present embodiment is MRI / OMRI, but can be applied as long as the measurement target living body is moved between two or more external magnetic field generation apparatuses that generate magnetic fields of different magnitudes. is there. Further, the correction by the measurement signal correction unit 33 of the measurement apparatus 1 in the present embodiment can also be applied when the measurement target living body is moved in one external magnetic field generation apparatus.
- an X-ray CT (Computed Tomography) apparatus, an ultrasonic imaging apparatus, and a positron tomography (PET) are arranged on the rotational movement path of the measurement target living body on the rotary table 8. It is also possible to continuously measure a plurality of measurement items by arranging other measurement devices such as a Positron (Emission Tomography) device.
- this measurement apparatus 1 it is also possible to obtain a tissue image as a morphological image in addition to a redox dynamic image as a functional image of a living body. Furthermore, it is also possible to obtain morphological images of non-living objects such as structures and defects of semiconductors, etc., and use various magnetic resonances such as electron spin resonance and nuclear magnetic resonance to provide functional images and morphologies of the measurement object. An image such as an image can be obtained.
- the correction by the measurement signal correction unit 33 of the measurement apparatus 1 in the present embodiment corrects a two-dimensional measurement image such as MRI / OMRI.
- This correction method is applicable to a three-dimensional or higher measurement image. But it can be applied.
- FIG. 6 shows a measurement sequence when a measurement image signal in a measurement target living body is obtained by applying a gradient magnetic field to the directions x and z orthogonal to the movement direction y and performing phase encoding.
- the gradient magnetic field G s is applied simultaneously with the application of the RF pulse (t 0 ), and then the phase encode pulses G p and G p2 are applied between t y0 and t y1.
- FIG. 7 is a diagram schematically showing the phase-encoded gradient magnetic field strength G y (n) applied to the measurement target living body when measurement is performed using this measurement sequence.
- v y is the moving speed of the moving direction y of the measurement object vivo.
- the corrected image signal S ′ (k x , k y , k z ) is similarly obtained from the equation (21) for the measurement image signal S (k x , k y , k z ) having three or more dimensions.
- the corrected image signal S ′ (k x , k y , k z ) is Fourier-transformed to obtain an accurate measurement image excluding the influence of movement in the y direction.
- the measurement apparatus and measurement method of the present invention are useful as an apparatus and method for obtaining an image of a measurement object using various magnetic resonances such as electron spin resonance and nuclear magnetic resonance.
- the present invention eliminates the influence of the moving speed of a moving measuring object in a measuring apparatus and a measuring method for obtaining a measuring image such as a functional image and a morphological image of the measuring object using magnetic resonance. It is suitable for obtaining a stable measurement image.
Landscapes
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Engineering & Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Radiology & Medical Imaging (AREA)
- High Energy & Nuclear Physics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Signal Processing (AREA)
- Biophysics (AREA)
- Surgery (AREA)
- Pathology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Theoretical Computer Science (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Pulmonology (AREA)
- Vascular Medicine (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
Abstract
磁気共鳴を利用して計測対象物の機能画像や形態画像などの計測画像を得る計測装置および計測方法において、移動中の計測対象物の移動速度の影響を排除して正確な計測画像を得ることを目的とする。計測対象生体であるマウスMの磁気共鳴を励起させるための磁場を発生させる第1、第2の外部磁場発生装置5,6と、計測対象物であるマウスMを回転移動させることにより、マウスMを第1、第2の外部磁場発生装置5,6の磁場中を移動させる回転テーブル8と、回転テーブル8による移動中に停止することなく、マウスMの移動方向yに傾斜磁場を掛けて位相エンコードにより、マウスM中の計測画像信号を得るOMRI計測処理部31およびMRI計測処理部32と、計測画像信号S(kx,ky)に対し、y方向の移動の影響を補正した補正画像信号S'(kx,ky)を得る計測信号補正部33とを有する。
Description
本発明は、電子スピン共鳴(ESR:Electron Spin Resonance)や核磁気共鳴(NMR:Nuclear Magnetic Resonance)など種々の磁気共鳴を利用して計測対象物の機能画像や形態画像などの画像を得るための計測装置および計測方法に関する。
多くの生理現象や疾患成因・進展に、活性酸素・フリーラジカルを含むレドックス代謝が密接に関与する。したがって、実験小動物でのレドックス動態を個体レベルで可視化できれば、生命現象の解明・疾病の解析とその治療法の確立・医薬品の開発に大きく貢献することは疑いもない。
レドックス動態を可視化するには、レドックス代謝の中間生成物であるフリーラジカルを特異的に検出する電子スピン共鳴画像法(ESRI:Electron Spin Resonance Imaging)が有効である。しかし、ESRIの画像は体内臓器との対応を欠く。そこで、この問題を解決するため、ESRIの画像に核磁気共鳴画像法(MRI:Magnetic Resonance Imaging)により得た体内臓器のMRI画像を重畳するESRI・MRI融合型磁気共鳴画像解析装置が開発されている。
また、オーバーハウザー効果とは、フリーラジカルの電子スピンをESR遷移させ、電子スピンと核スピンの双極子相互作用により核スピンが偏極する現象である。OMRIとは、フリーラジカルの電子スピンを励起させ、その後、水分子の水素核スピンを偏極させてMRI測定を行う画像化法である。OMRIでは、通常の核スピンのボルツマン分布と比較して、最大(理論値)で330倍に核スピン偏極が増強される。すなわち、通常のMRI測定に較べ、330倍(理論値)の高感度化を図ることができる。
また、本出願人は、特許文献1において、電子スピン共鳴や核磁気共鳴など種々の磁気共鳴を利用して生体の組織画像を得るための生体測定装置を提案している。この生体測定装置は、所定の大きさの磁場を発生させる第1の磁場発生手段と、第1の磁場発生手段の磁場よりも大きい磁場を発生させる第2の磁場発生手段と、計測対象生体をRFパルスの照射に同期させて第1、第2の磁場発生手段の間で直線移動させる直線移動手段と、計測対象生体を停止してRFパルスに応じて検出される信号に基づいて計測対象生体中の組織画像を計測する計測処理手段とを有する。
この生体測定装置では、第1の磁場発生手段をESRIの外部磁場発生装置およびPEDRI(OMRI)の電子スピン励起装置として用い、第2の磁場発生手段をMRIおよびOMRIの外部磁場発生装置として用いることができ、ラジカル量の時間変化画像はOMRI、質的変化画像はスペクトル・空間4次元ESRI/MRIで得られることになり、かつ第2の外部磁場発生手段による磁場を大きくできるから、高感度・高分解の画像を得られる。
ところで、この生体測定装置では、第1、第2の磁場発生手段の間に設置した直線移動手段により計測対象生体を反復移動し、停止してから計測するようになっており、移動および停止時に大きな加速度を生じる。そのため、この生体測定装置では移動する計測対象生体へ大きな負荷が掛かってしまうという問題がある。
そこで、本出願人は、複数の磁場発生手段間で移動する計測対象物を無停止で計測することで、計測対象物への負荷をなくすことが可能な計測装置を開発中である。ところが、計測対象物を無停止で計測すると、計測画像が移動速度の影響を受けてしまい、計測画像がずれてしまうという問題が発生している。
そこで、本発明は、磁気共鳴を利用して計測対象物の機能画像や形態画像などの計測画像を得る計測装置および計測方法において、移動中の計測対象物の移動速度の影響を排除して正確な計測画像を得ることを目的とする。
本発明の計測装置は、磁気共鳴を利用して計測対象物の画像を得るための計測装置であって、計測対象物の磁気共鳴を励起させるための磁場を発生させる磁場発生手段と、計測対象物、または、磁場発生手段を移動させることにより、計測対象物を磁場発生手段の磁場中を移動させる移動手段と、移動手段による移動中に停止することなく、計測対象物の磁場発生手段に対する移動方向yおよびこの移動方向yに対して直交する方向xのいずれか一方または両方に傾斜磁場を掛けて位相エンコードおよび周波数エンコードのいずれか一方または両方により、計測対象物中の計測画像信号を得る計測手段と、計測画像信号に対し、y方向の移動の影響を補正した補正画像信号を得る補正手段とを有するものである。
また、本発明の計測方法は、磁気共鳴を利用して計測対象物の画像を得る計測方法であって、計測対象物、または、計測対象物の磁気共鳴を励起させるための磁場を発生させる磁場発生手段を移動させることにより、計測対象物を磁場発生手段の磁場中を移動させること、計測対象物または磁場発生手段の移動中に停止することなく、計測対象物の磁場発生手段に対する移動方向yおよびこの移動方向yに対して直交する方向xのいずれか一方または両方に傾斜磁場を掛けて位相エンコードおよび周波数エンコードのいずれか一方または両方により、計測対象物中の計測画像信号を得ること、計測画像信号に対し、y方向の移動の影響を補正した補正画像信号を得ることを含む。
これらの発明によれば、移動手段による計測対象物または磁場発生手段の移動中であっても、計測対象物の磁場発生手段に対する移動方向yの移動の影響を補正した補正画像信号が得られるので、ずれのない計測対象物の機能画像や形態画像などの正確な計測画像を得ることができる。
なお、補正画像信号は、計測画像信号をS(kx,ky)、補正画像信号をS’(kx,ky)としたとき、式
 (但し、kx,kyはx方向およびy方向の空間周波数、γは磁気回転比、Gy
(n)はn回目の計測における位相エンコードまたは周波数エンコードの傾斜磁場強度、vyはy方向の移動速度、Δtyは位相エンコードまたは周波数エンコードの印加時間、ty0は位相エンコードまたは周波数エンコードの印加までの時間である。)により得るものであることが望ましい。
(但し、kx,kyはx方向およびy方向の空間周波数、γは磁気回転比、Gy
(n)はn回目の計測における位相エンコードまたは周波数エンコードの傾斜磁場強度、vyはy方向の移動速度、Δtyは位相エンコードまたは周波数エンコードの印加時間、ty0は位相エンコードまたは周波数エンコードの印加までの時間である。)により得るものであることが望ましい。
これにより、y方向の移動速度、位相エンコードまたは周波数エンコードの印加時間、位相エンコードまたは周波数エンコードの印加までの時間によって決まるy方向の移動の影響を補正した補正画像信号S’(kx,ky)が得られるので、ずれのない計測対象物の機能画像や形態画像などの正確な計測画像、特に二次元の正確な計測画像を得ることができる。
なお、補正画像信号は、計測画像信号をS(kx,ky,kz)、補正画像信号をS’(kx,ky,kz)としたとき、式
 (但し、kx,ky,kzはx方向、y方向およびz方向の空間周波数、γは磁気回転比、Gy
(n)はn回目の計測における位相エンコードまたは周波数エンコードの傾斜磁場強度、vyはy方向の移動速度、Δtyは位相エンコードまたは周波数エンコードの印加時間、ty0は位相エンコードまたは周波数エンコードの印加までの時間である。)により得るものであることが望ましい。
(但し、kx,ky,kzはx方向、y方向およびz方向の空間周波数、γは磁気回転比、Gy
(n)はn回目の計測における位相エンコードまたは周波数エンコードの傾斜磁場強度、vyはy方向の移動速度、Δtyは位相エンコードまたは周波数エンコードの印加時間、ty0は位相エンコードまたは周波数エンコードの印加までの時間である。)により得るものであることが望ましい。
これにより、y方向の移動速度、位相エンコードまたは周波数エンコードの印加時間、位相エンコードまたは周波数エンコードの印加までの時間によって決まるy方向の移動の影響を補正した補正画像信号S’(kx,ky,kz)が得られるので、ずれのない計測対象物の機能画像や形態画像などの正確な計測画像、特に三次元の正確な計測画像を得ることができる。
ここで、磁場発生手段は、所定の大きさを発生させる第1の磁場発生手段と、この第1の磁場発生手段の磁場とは異なる大きさの磁場を発生させる第2の磁場発生手段とを有するものであり、移動手段は、計測対象物、または、前記第1および第2の磁場発生手段を移動させることにより、計測対象物を第1および第2の磁場発生手段の磁場中を順に移動させるものであることが望ましい。
これにより、複数の磁場発生手段によりそれぞれ異なる大きさの磁場を発生させて、計測対象物をこれらの複数の磁場発生手段の磁場中を順次通過させながら電子スピン共鳴や核磁気共鳴など種々の磁気共鳴を利用して計測対象物中の機能画像や組織画像などのずれのない正確な計測画像を得ることができる。
また、移動手段は、計測対象物、または、第1および第2の磁場発生手段を回転移動させることにより、計測対象物を第1および第2の磁場発生手段の磁場中を順に通過させる回転移動手段であることが望ましい。
これにより、計測対象物、または、第1および第2の磁場発生手段を回転移動させて、計測対象物をこれらの複数の磁場発生手段の磁場中を順次通過させながら電子スピン共鳴や核磁気共鳴など種々の磁気共鳴を利用して計測対象物中の機能画像や組織画像などのずれのない正確な計測画像を得ることができる。
なお、本発明の計測対象物としては、生物の体(生体)や生物以外の物体(例えば、半導体)などが挙げられる。計測対象物が生体の場合、機能画像としてのレドックス動態画像、代謝画像などの生体機能画像や、形態画像としての組織画像(13C、1H、31P核等)などのずれのない正確な計測画像を得ることができる。また、計測対象物が物体の場合、構造や欠陥などの形態画像、構成化合物の分布画像などのずれのない正確な計測画像を得ることができる。
ここで、例えば、レドックス動態画像を得るためには、第1または第2の磁場発生手段の一方は、核磁気共鳴を励起して計測するためのものであり、他方は、電子スピン共鳴を励起して計測するためのものであることが望ましい。これにより、OMRIによりずれのない正確な生体レドックス動態画像を得ることができる。
なお、第1および第2の磁場発生手段は、どちらが大きい磁場を発生させるものであっても良いが、第2の磁場発生手段が第1の磁場発生手段の磁場よりも大きい磁場を発生させるものである場合、低磁場である第1の磁場発生手段をOMRIの電子スピン励起装置として用い、高磁場である第2の磁場発生手段をMRIおよびOMRIの外部磁場発生装置として用いることができる。これにより、第2の磁場発生手段ではMRI画像およびOMRI画像が得られる。特に、この計測装置では、低磁場の第1の磁場発生手段により電子スピンが励起された後に、高磁場の第2の磁場発生手段によりOMRI測定が行われるので、OMRIの外部磁場が非常に大きくなり、高感度・高分解能のずれのない正確なOMRI画像を得ることができる。
一方、第1の磁場発生手段が第2の磁場発生手段の磁場よりも大きい磁場を発生させるものである場合、高磁場である第1の磁場発生手段をMRIの外部磁場発生装置として用い、低磁場である第2の磁場発生手段をOMRIの外部磁場発生装置として用いることができる。これにより、第1の磁場発生手段ではMRI画像が得られ、第2の磁場発生手段ではOMRI画像が得られる。
このように本実施形態における計測装置では、第1または第2の磁気発生手段が磁気共鳴を励起して計測するためのものであることによって、電子スピン共鳴や核磁気共鳴など種々の磁気共鳴を利用して計測対象物の機能画像や形態画像などのずれのない正確な計測画像を得ることができる。
(1)計測対象物、または、計測対象物の磁気共鳴を励起させるための磁場を発生させる磁場発生手段を移動させることにより、計測対象物を磁場発生手段の磁場中を移動させ、計測対象物または磁場発生手段の移動中に停止することなく、計測対象物の磁場発生手段に対する移動方向yおよびこの移動方向yに対して直交する方向xのいずれか一方または両方に傾斜磁場を掛けて位相エンコードおよび周波数エンコードのいずれか一方または両方により、計測対象物中の計測画像信号を得て、この計測画像信号に対し、y方向の移動の影響を補正した補正画像信号を得る構成により、移動手段による計測対象物または磁場発生手段の移動中であっても、移動中の計測対象物の移動速度の影響を排除した、ずれのない計測対象物の機能画像や形態画像などの正確な計測画像を得ることが可能となる。
(2)補正画像信号が、式
 により得るものであることにより、y方向の移動速度、位相エンコードまたは周波数エンコードの印加時間、位相エンコードまたは周波数エンコードの印加までの時間によって決まるy方向の移動の影響を補正した、ずれのない計測対象物の機能画像や形態画像などの正確な計測画像、特に二次元の正確な計測画像を得ることが可能となる。
により得るものであることにより、y方向の移動速度、位相エンコードまたは周波数エンコードの印加時間、位相エンコードまたは周波数エンコードの印加までの時間によって決まるy方向の移動の影響を補正した、ずれのない計測対象物の機能画像や形態画像などの正確な計測画像、特に二次元の正確な計測画像を得ることが可能となる。
(3)補正画像信号が、式
 により得るものであることにより、y方向の移動速度、位相エンコードまたは周波数エンコードの印加時間、位相エンコードまたは周波数エンコードの印加までの時間によって決まるy方向の移動の影響を補正した、ずれのない計測対象物の機能画像や形態画像などの正確な計測画像、特に三次元の正確な計測画像を得ることが可能となる。
により得るものであることにより、y方向の移動速度、位相エンコードまたは周波数エンコードの印加時間、位相エンコードまたは周波数エンコードの印加までの時間によって決まるy方向の移動の影響を補正した、ずれのない計測対象物の機能画像や形態画像などの正確な計測画像、特に三次元の正確な計測画像を得ることが可能となる。
(4)磁場発生手段が、所定の大きさを発生させる第1の磁場発生手段と、この第1の磁場発生手段の磁場とは異なる大きさの磁場を発生させる第2の磁場発生手段とを有するものであり、移動手段が、計測対象物、または、前記第1および第2の磁場発生手段を移動させることにより、計測対象物を第1および第2の磁場発生手段の磁場中を順に移動させるものであることにより、無停止で電子スピン共鳴や核磁気共鳴など種々の磁気共鳴を利用して計測対象物中の機能画像や組織画像などのずれのない正確な計測画像を得ることが可能となる。
(5)移動手段が、計測対象物、または、第1および第2の磁場発生手段を回転移動させることにより、計測対象物を第1および第2の磁場発生手段の磁場中を順に通過させる回転移動手段であることにより、計測対象物を反復移動させる必要がなく、計測対象物または第1および第2の磁場発生手段を停止することなく回転移動させながら電子スピン共鳴や核磁気共鳴など種々の磁気共鳴を利用して計測対象物のずれのない正確な機能または形態画像を得ることができる。これにより、従来のように測定時に反復移動時に一旦停止することにより生じていた負荷をなくすことができ、第1および第2の磁場発生手段にも停止することにより生じていた負荷が掛かることがない。
(6)第1または第2の磁場発生手段の一方が、核磁気共鳴を励起するためのものであり、他方は、電子スピン共鳴を励起するためのものであることにより、OMRIによりずれのない正確な生体レドックス動態画像を得ることができる。
(7)第2の磁場発生手段が第1の磁場発生手段の磁場よりも大きい磁場を発生させるものである場合、低磁場である第1の磁場発生手段をOMRIの電子スピン励起装置として用い、高磁場である第2の磁場発生手段をMRIおよびOMRIの外部磁場発生装置として用いることができるので、OMRIの外部磁場が非常に大きくなり、高感度・高分解能のずれのない正確なOMRI画像を得ることができる。
(8)第1の磁場発生手段が第2の磁場発生手段の磁場よりも大きい磁場を発生させるものである場合、高磁場である第1の磁場発生手段をMRIの外部磁場発生装置として用い、低磁場である第2の磁場発生手段をOMRIの外部磁場発生装置として用いることができるので、高感度のずれのない正確なOMRI画像を得ることができる。
1 計測装置
2 本体部
3 制御部
4 表示部
5,6 外部磁場発生装置
7 RFコイル
8 回転テーブル
9 回転駆動機構
10,11 静磁場発生ドライバ
12 RFコイルドライバ
13 検出信号受信部
14 回転駆動機構ドライバ
30 計測シーケンス処理部
31 OMRI計測処理部
32 MRI計測処理部
33 計測信号補正部
2 本体部
3 制御部
4 表示部
5,6 外部磁場発生装置
7 RFコイル
8 回転テーブル
9 回転駆動機構
10,11 静磁場発生ドライバ
12 RFコイルドライバ
13 検出信号受信部
14 回転駆動機構ドライバ
30 計測シーケンス処理部
31 OMRI計測処理部
32 MRI計測処理部
33 計測信号補正部
図1は本発明の実施の形態における計測装置の概略構成図、図2は図1の計測装置の本体部の斜視図、図3は平面図である。
図1において、本発明の実施の形態における計測装置1は、計測対象物としての生体を計測するものであって、計測対象生体(図示例ではマウスM)を載置して計測を行う本体部2と、本体部2の各部の動作制御を行う制御部3と、制御部3の処理結果などを表示する表示部4とから構成される。
図1において、本発明の実施の形態における計測装置1は、計測対象物としての生体を計測するものであって、計測対象生体(図示例ではマウスM)を載置して計測を行う本体部2と、本体部2の各部の動作制御を行う制御部3と、制御部3の処理結果などを表示する表示部4とから構成される。
本体部2は、第1の磁場発生手段としての低磁場用の第1の外部磁場発生装置5と、第2の磁場発生手段としての高磁場用の第2の外部磁場発生装置6と、円筒状のRFコイル(共振器)7と、鉛直軸周りに回転する回転移動手段としての回転テーブル8とを有する。回転テーブル8は、モータ、プーリやベルトなどにより構成される回転駆動機構9(図3参照。)により回転駆動される。
RFコイル7は、回転テーブル8の周縁部上に固定されている。計測対象生体は、RFコイル7内に保持され、回転テーブル8とともに回転移動することにより、第1の外部磁場発生装置5および第2の外部磁場発生装置6の磁場中を順に通過するようになっている。図3の例では、回転テーブル8は時計回りに回転する。RFコイル7は、第1の外部磁場発生装置5および第2の外部磁場発生装置6の静磁場に直交する方向に電磁波磁界を形成するものである。
第1の外部磁場発生装置5は、本実施形態においては3つの外部磁場発生装置5a,5b,5cから構成されており、それぞれ永久磁石50と、傾斜磁場コイル51と、磁場掃引コイル52とを有する。この第1の外部磁場発生装置5は、回転テーブル8上のRFコイル7が通過する空間内にOMRIにおける励起磁場を提供するものである。この第1の外部磁場発生装置5では、第2の外部磁場発生装置6におけるOMRI測定のためにRFコイル7内に保持された計測対象生体のフリーラジカルの電子スピンを励起する。
第2の外部磁場発生装置6は、回転テーブル8上のRFコイル7が通過する空間内に静磁場を発生させるための永久磁石60を有する。また、傾斜磁場コイル61が設置されており、永久磁石60により発生された静磁場に所定のMRパルスシーケンスに応じた所定規模の傾斜磁場を所定の回数で生成するようになっている。この第2の外部磁場発生装置6は、MRI/OMRI用に外部静磁場を提供するものである。この第2の外部磁場発生装置6では、MRI測定およびOMRI測定を行う。
そして、第1の外部磁場発生装置5は、第1の静磁場発生ドライバ10を介して制御部3に接続されている。この第1の静磁場発生ドライバ10には、傾斜磁場コイル51と、磁場掃引コイル52とに給電するための図示しない電源が接続されている。第1の静磁場発生ドライバ10は、制御部3からの指令によって傾斜磁場コイル51と、磁場掃引コイル52とを制御する。なお、本実施形態における第1の外部磁場発生装置5の磁場強度は20mTであるが、この磁場強度は、OMRIでは0超50mT以下、MRIでは0超11T以下の範囲で任意に設定することが可能である。また、永久磁石60に代えて電磁石を用いることも可能である。
第2の外部磁場発生装置6は、第2の静磁場発生ドライバ11を介して制御部3に接続されている。この第2の静磁場発生ドライバ11には、傾斜磁場コイル61に給電するための図示しない電源が接続されている。第2静磁場発生ドライバ11は、制御部3からの指令によって傾斜磁場コイル61を駆動する。なお、本実施形態における第2の外部磁場発生装置6の磁場強度は1.5Tであるが、この磁場強度は0超11T以下で任意に設定することが可能であり、大きい方が好ましい。なお、本実施形態においては永久磁石60を用いているが、永久磁石60の場合、磁場強度は2T程度まで大きくすることが可能である。また、永久磁石60に代えて超伝導磁石を用いることも可能である。永久磁石60に代えて超伝導磁石を用いた場合には11T程度まで大きくすることが可能である。
RFコイル7は、RFコイルドライバ12、検出信号受信部13を介して制御部3に接続されている。また、図3に示す回転駆動機構9は、図1に示す回転駆動機構ドライバ14を介して制御部3に接続されている。RFコイルドライバ12および回転駆動機構ドライバ14には、それぞれRFコイル7および回転駆動機構9に給電するための図示しない電源が接続されている。
RFコイルドライバ12および回転駆動機構ドライバ14は、制御部3から指令されるシーケンスに従い、それぞれRFコイル7および回転駆動機構9を駆動する。このとき、RFコイルドライバ12は、回転駆動ドライバ10と同期して、RFコイル7が回転テーブル8とともに回転移動して第1の外部磁場発生装置5および第2の外部磁場発生装置6の磁場中を通過するタイミングでRFコイル7を駆動する。RFコイル7に高周波パルスが印加されると、RFコイル7に高周波磁場が発生し、内部の計測対象生体が高周波磁場にさらされる。
そして、第1の外部磁場発生装置5内においてRFコイル7で受信された電子スピン共鳴信号および第2の外部磁場発生装置6内においてRFコイル7で受信された磁気共鳴信号は、それぞれ検出信号受信部13で受け取られ、制御部3に渡される。なお、第1の外部磁場発生装置5から第2の外部磁場発生装置6までの駆動時間は1秒以内であることが好ましく、さらに好ましくは0.7秒以内であり、本実施形態においては0.5秒に設定される。
また、制御部3には、計測シーケンスに従って計測対象生体の電子スピン共鳴信号および磁気共鳴信号を得る計測シーケンス処理部30と、OMRI計測処理部31と、MRI計測処理部32と、計測信号補正部33とが設けられている。計測シーケンス制御部30は、第1の外部磁場発生装置5、第2の外部磁場発生装置6、RFコイル7および回転駆動機構9に対する給電シーケンスと、RFコイル7における計測シーケンスとを有し、第1の外部磁場発生装置5、第2の外部磁場発生装置6、RFコイル7および回転駆動機構9を制御するものである。制御部3は、実際にはコンピュータシステムからなり、ハードディスクなどの記録媒体に格納されたコンピュータプログラムを実行することによって上述のように機能する。
OMRI計測処理部31およびMRI計測処理部32は、計測シーケンスに従って得られた電子スピン共鳴信号および磁気共鳴信号に基づいて画像処理を行い、計測画像信号を得る計測手段である。計測信号補正部33は、OMRI計測処理部31およびMRI計測処理部32により得られた計測画像信号を補正して移動の影響を補正した補正画像信号を得る補正手段である。この計測信号補正部33により得られた補正画像信号が表示装置4上に表示される。
ここで、計測信号補正部33による計測画像信号の補正処理について詳細に説明する。
まず、OMRI計測処理部31およびMRI計測処理部32では、回転テーブル8による移動中に停止することなく、計測対象生体の第1、第2の外部磁場発生装置5,6に対する移動方向yおよびこの移動方向yに対して直交する方向xのいずれか一方または両方に傾斜磁場を掛けて位相エンコードおよび周波数エンコードのいずれか一方または両方により、計測対象生体中の計測画像信号を得ている。
まず、OMRI計測処理部31およびMRI計測処理部32では、回転テーブル8による移動中に停止することなく、計測対象生体の第1、第2の外部磁場発生装置5,6に対する移動方向yおよびこの移動方向yに対して直交する方向xのいずれか一方または両方に傾斜磁場を掛けて位相エンコードおよび周波数エンコードのいずれか一方または両方により、計測対象生体中の計測画像信号を得ている。
なお、以下の説明では、簡単のために移動方向yに対して直交する方向xに傾斜磁場を掛けて位相エンコードにより計測対象生体中の計測画像信号を得る場合を例にとっているが、位相エンコードを周波数エンコードに代えたり、併用したりする場合も同様に行うことが可能である。傾斜磁場を掛ける方向についても同様である。
図4は移動方向yに対して直交する方向xに傾斜磁場を掛けて位相エンコードにより計測対象生体中の計測画像信号を得る場合の計測シーケンスを示している。図4に示すように、この計測シーケンスでは、RFパルスの印加と同時(t0)に傾斜磁場Gsを掛け、その後、ty0~ty1の間に位相エンコードパルスGpを印加して計測画像信号を得ている。図5は、この計測シーケンスにより測定を行った場合に計測対象生体に印加される位相エンコードの傾斜磁場強度Gy
(n)を模式的に表した図である。vyは計測対象生体の移動方向yの移動速度である。なお、計測対象生体はx方向に移動しないので、vxは0である。上付きの(n)は、1測定(スキャン)ごとにGyの値が増加していくことを示している。
このとき、傾斜磁場によりエンコードされた磁化の信号S(kx、ky)は、
 となる。ここで、kx,kyは空間周波数、ρ(x,y)は磁化密度である。
となる。ここで、kx,kyは空間周波数、ρ(x,y)は磁化密度である。
また、計測対象生体が移動しているときの位置は、
 である。ここで、γは磁気回転比、τは時間である。
である。ここで、γは磁気回転比、τは時間である。
ここで、移動方向はy方向のみであり、Gy(n)は時刻ty0~ty1までの間のみ印加されるので、上式(2-2)は、
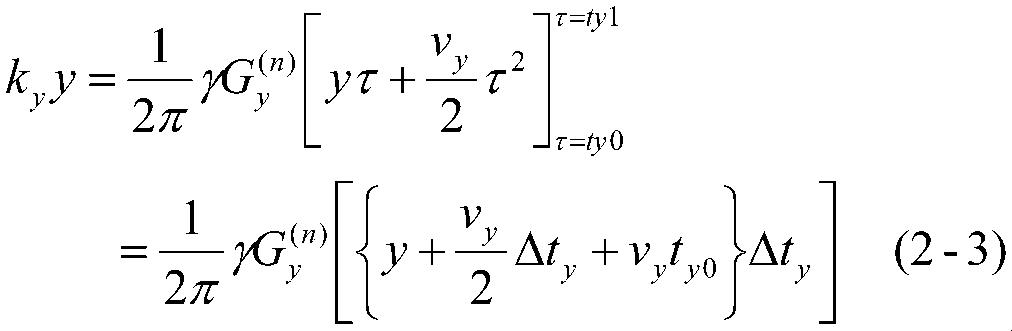 となる。
となる。
これにより、上式(1)は、
 となる。
となる。
ここで、次式(4)によりy’を導入し、座標変換を行う。

この座標変換により、yは次式(5)のように表される。

上式(3)に式(5)を適用して座標変換を行うと、次式(6)が得られる。

さらに、フーリエ変換により、式(6)は、
 となる。
となる。
この式(8)は計測対象生体のy方向の移動が計測画像のy方向の移動として現れることを示している。式(8)から実際の計測画像上のシフト量を計算した例を表1に示す。この計算に必要なパラメータは、y方向の移動速度vy、位相エンコードの印加時間Δty、位相エンコード印加までの時間ty0である。表1から分かるように、式(8)により算出されるシフト量(計算値)が実測値とほぼ一致する。

次に、式(3)からy方向移動の影響を補正する場合、式(3)は次式(9)のように表されるので、
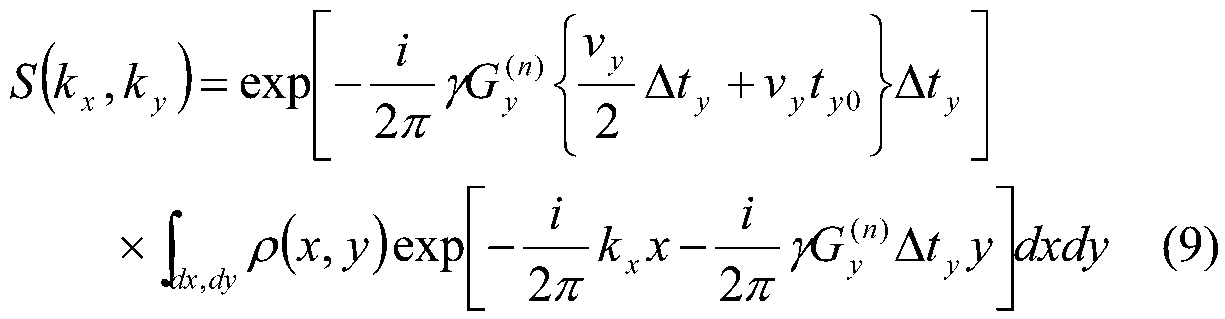 補正後の計測画像信号は、
補正後の計測画像信号は、
 となる。
となる。
計測信号補正部33は、この式(10)により、計測画像信号S(kx、ky)から補正画像信号S’(kx、ky)を得るものである。この演算は位相回転をすることに相当する。
そして、この補正画像信号S’(kx、ky)をフーリエ変換すると、
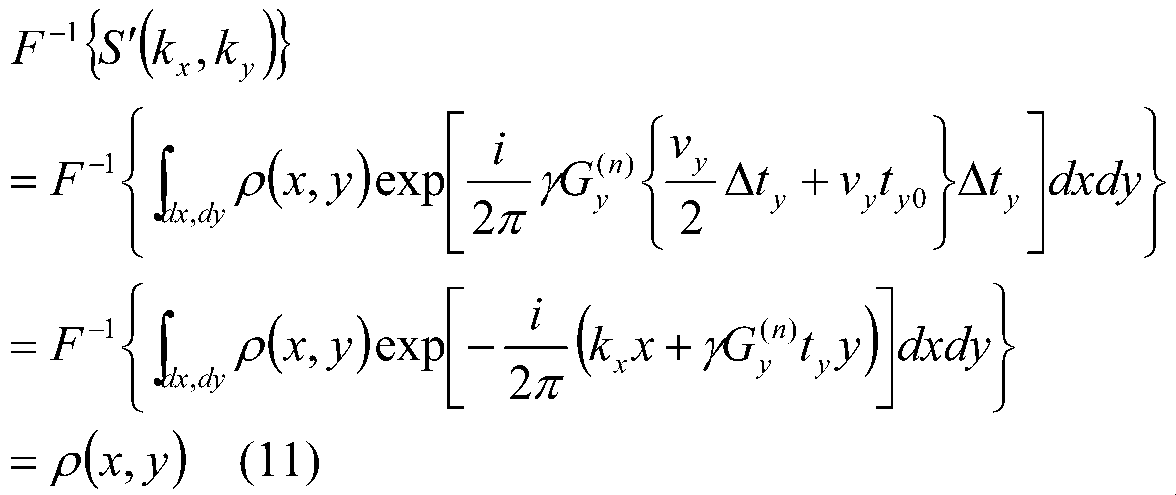 となり、補正画像信号S’(kx、ky)をフーリエ変換することで、y方向の移動の影響を排除した正確な計測画像が得られることが分かる。
となり、補正画像信号S’(kx、ky)をフーリエ変換することで、y方向の移動の影響を排除した正確な計測画像が得られることが分かる。
次に、上記構成の計測装置1の動作について説明する。
まず、回転テーブル8上のRFコイル7内に計測対象生体の小動物、例えばマウスMを設置する。この例では、計測対象生体における酸化ストレス疾患でのレドックス代謝異常、あるいは統合失調症等での脳機能を空間画像解析する。
まず、回転テーブル8上のRFコイル7内に計測対象生体の小動物、例えばマウスMを設置する。この例では、計測対象生体における酸化ストレス疾患でのレドックス代謝異常、あるいは統合失調症等での脳機能を空間画像解析する。
ついで、回転駆動機構9を駆動して回転テーブル8を回転し、マウスMを第1の外部磁場発生装置5および第2の外部磁場発生装置6の磁場中を順に通過させる。このとき、第1の外部磁場発生装置5では、RFコイル7から高周波を照射するとともに、磁場掃引コイル52を駆動することで、静磁場を高速掃引する。これにより、マウスM中の不対電子が高周波を吸収し、電子スピンが共鳴励起される。
第1の外部磁場発生装置5を通過したマウスMは、次に第2の外部磁場発生装置6内に入り、1T以上、本実施形態においては1.5Tという非常に強い静磁場に置かれる。これにより、第1の外部磁場発生装置5において共鳴励起された電子スピンが核スピンへエネルギー遷移が生じさせられることになる。ついで、RFコイル7を用い、高周波照射によりマウスMから得られる信号を検出信号受信部13で受信する。
このようにして検出信号受信部13で受信された信号は、制御部3で受け取られ、OMRI計測処理部31およびMRI計測処理部32で処理される。MRI計測処理部32は、第2の外部磁場発生装置5においてRFコイル7から得られた信号を処理することでMRI画像を合成する。また、OMRI計測処理部31は、第2の外部磁場発生装置5から得られた信号を処理することで、核スピン分布を示す画像を合成する。
そして、これらのMRI計測処理部32およびOMRI計測処理部31により得られた計測画像信号は、上述の計測信号補正部33により補正され、この計測信号補正部33により得られた補正画像信号が表示装置4上に表示される。
以上のように、本実施形態における計測装置1では、MRI計測処理部32およびOMRI計測処理部31により得られた計測画像信号S(kx,ky)に対し、y方向の移動の影響を補正した補正画像信号S’(kx,ky)を得るので、回転テーブル8によるマウスMの移動中であっても、移動中のマウスMの移動速度の影響を排除した、ずれのない正確なマウスMのMRI画像およびOMRI画像を得ることができる。
また、本実施形態における計測装置1では、第1の外部磁場発生装置5および第2の外部磁場発生装置6によりそれぞれ異なる大きさの磁場を発生させ、マウスMを回転テーブル8により回転移動させて、マウスMを第1および第2の外部磁場発生装置5,6の磁場中を順次通過させながらずれのない正確なMRI画像およびOMRI画像を得ることが可能である。したがって、従来のようにマウスMを反復移動させることがなく、移動および停止時に負荷が掛かることがない。
また、この計測装置1では、低磁場である第1の外部磁場発生装置5をOMRIの電子スピン励起装置として用い、高磁場である第2の外部磁場発生装置5をMRIおよびOMRIの外部磁場発生装置として用いている。したがって、この計測装置1では、低磁場の第1の外部磁場発生装置5により電子スピンが励起された後に、高磁場の第2の外部磁場発生装置6によりOMRI測定が行われるので、OMRIの外部磁場が非常に大きくなり、高感度・高分解能のずれのない正確なOMRI画像を得ることが可能である。
なお、この計測装置1において、回転テーブル8を逆回転させて、マウスMを第2の外部磁場発生装置6、第1の外部磁場発生装置5の順に通過させて計測することも可能である。この場合、高磁場である第2の外部磁場発生装置6をMRIの外部磁場発生装置として用い、低磁場である第1の外部磁場発生装置をOMRIの外部磁場発生装置として用いることができる。
これにより、第2の外部磁場発生装置6ではMRI画像が得られ、第1の外部磁場発生装置5ではOMRI画像が得られる。
また、本実施形態における計測装置1では、回転テーブル8によりマウスMを回転移動させる構成であるが、マウスMを反復移動させるなど逆にマウスMを回転移動させないで、第1および第2の外部磁場発生装置5,6を回転移動させる構成とすることも可能である。この場合、マウスMの第1、第2の外部磁場発生装置5,6に対する移動方向yは変わらないので、前述と同様に計測信号補正部33による補正を行うことが可能である。
また、この場合には、マウスMが静止したままであるので、計測時に不快に感じることがなく、生体に優しい計測装置を実現できる。また、本実施形態における計測装置1では、第1および第2の外部磁場発生装置5,6を反復移動させなくて良いため、移動時および停止時に第1および第2の外部磁場発生装置5,6に移動による負荷が掛かることがない。
また、本実施形態における計測装置1は、MRI/OMRIであるが、異なる大きさの磁界を発生させる2以上の複数の外部磁場発生装置間で計測対象生体を移動させる装置であれば適用可能である。また、本実施形態における計測装置1の計測信号補正部33による補正は、1つの外部磁場発生装置内で計測対象生体を移動させる場合にも適用可能である。
また、本実施形態における計測装置1では、回転テーブル8上の計測対象生体の回転移動経路上にX線CT(Computed Tomography:コンピュータ断層撮影)装置、超音波画像化装置やポジトロン断層撮影(PET:Positron Emission Tomography)装置などの他の計測装置を配置して連続的に複数の測定項目の測定を行うことも可能である。
また、この計測装置1では、生体の機能画像としてのレドックス動態画像の他、形態画像としての組織画像を得ることも可能である。さらに、生物以外の物体、例えば半導体などの構造や欠陥などの形態画像を得ることも可能であり、電子スピン共鳴や核磁気共鳴など種々の磁気共鳴を利用して計測対象物の機能画像や形態画像などの画像を得ることが可能である。
また、本実施形態における計測装置1の計測信号補正部33による補正は、MRI/OMRIなどの二次元の計測画像について補正するものであるが、この補正方法は、三次元以上の計測画像に対しても応用可能である。
図6は移動方向yに対して直交する方向x,zに傾斜磁場を掛けて位相エンコードにより計測対象生体中の計測画像信号を得る場合の計測シーケンスを示している。図6に示すように、この計測シーケンスでは、RFパルスの印加と同時(t0)に傾斜磁場Gsを掛け、その後、ty0~ty1の間に位相エンコードパルスGp,Gp2を印加して計測画像信号を得る。図7は、この計測シーケンスにより測定を行った場合に計測対象生体に印加される位相エンコードの傾斜磁場強度Gy
(n)を模式的に表した図である。vyは計測対象生体の移動方向yの移動速度である。
この場合、前述の式(1)~(11)は、それぞれ対応する下記式(12)~(22)により表される。


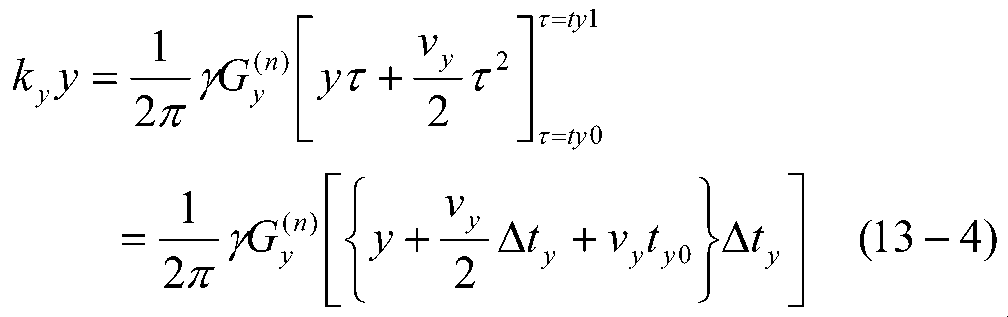
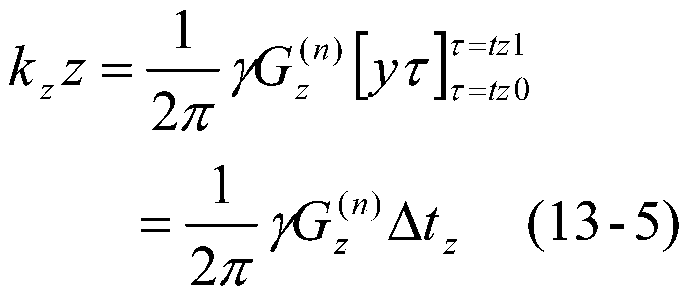







したがって、三次元以上の計測画像信号S(kx,ky,kz)に対しても、同様に式(21)により、補正画像信号S’(kx,ky,kz)を得ることが可能であり、補正画像信号S’(kx,ky,kz)をフーリエ変換することで、y方向の移動の影響を排除した正確な計測画像が得られる。
本発明の計測装置および計測方法は、電子スピン共鳴や核磁気共鳴など種々の磁気共鳴を利用して計測対象物の画像を得るための装置および方法として有用である。特に、本発明は、磁気共鳴を利用して計測対象物の機能画像や形態画像などの計測画像を得る計測装置および計測方法において、移動中の計測対象物の移動速度の影響を排除して正確な計測画像を得るものとして好適である。
Claims (15)
- 磁気共鳴を利用して計測対象物の画像を得るための計測装置であって、
前記計測対象物の磁気共鳴を励起させるための磁場を発生させる磁場発生手段と、
前記計測対象物、または、前記磁場発生手段を移動させることにより、前記計測対象物を前記磁場発生手段の磁場中を移動させる移動手段と、
前記移動手段による移動中に停止することなく、前記計測対象物の前記磁場発生手段に対する移動方向yおよびこの移動方向yに対して直交する方向xのいずれか一方または両方に傾斜磁場を掛けて位相エンコードおよび周波数エンコードのいずれか一方または両方により、前記計測対象物中の計測画像信号を得る計測手段と、
前記計測画像信号に対し、前記y方向の移動の影響を補正した補正画像信号を得る補正手段と
を有する計測装置。 - 前記補正手段は、前記計測画像信号をS(kx,ky)、前記補正画像信号をS’(kx,ky)としたとき、式
(但し、kx,kyは前記x方向およびy方向の空間周波数、γは磁気回転比、Gy (n)はn回目の計測における前記位相エンコードまたは周波数エンコードの傾斜磁場強度、vyはy方向の移動速度、Δtyは前記位相エンコードまたは周波数エンコードの印加時間、ty0は前記位相エンコードまたは周波数エンコードの印加までの時間である。)
により前記補正画像信号を得るものである請求項1記載の計測装置。 - 前記補正手段は、前記計測画像信号をS(kx,ky,kz)、前記補正画像信号をS’(kx,ky,kz)としたとき、式
(但し、kx,ky,kzは前記x方向、y方向およびz方向の空間周波数、γは磁気回転比、Gy (n)はn回目の計測における前記位相エンコードまたは周波数エンコードの傾斜磁場強度、vyはy方向の移動速度、Δtyは前記位相エンコードまたは周波数エンコードの印加時間、ty0は前記位相エンコードまたは周波数エンコードの印加までの時間である。)
により前記補正画像信号を得るものである請求項2記載の計測装置。 - 前記磁場発生手段は、所定の大きさを発生させる第1の磁場発生手段と、この第1の磁場発生手段の磁場とは異なる大きさの磁場を発生させる第2の磁場発生手段とを有するものであり、
前記移動手段は、計測対象物、または、前記第1および第2の磁場発生手段を移動させることにより、前記計測対象物を前記第1および第2の磁場発生手段の磁場中を順に移動させるものである
請求項1記載の計測装置。 - 前記移動手段は、前記計測対象物、または、前記第1および第2の磁場発生手段を回転移動させることにより、前記計測対象物を前記第1および第2の磁場発生手段の磁場中を順に通過させる回転移動手段である請求項4記載の計測装置。
- 前記第1または第2の磁場発生手段の一方は、核磁気共鳴を励起して計測するためのものであり、他方は、電子スピン共鳴を励起して計測するためのものである請求項4または5に記載の計測装置。
- 前記磁場発生手段は、所定の大きさを発生させる第1の磁場発生手段と、この第1の磁場発生手段の磁場とは異なる大きさの磁場を発生させる第2の磁場発生手段とを有するものであり、
前記移動手段は、計測対象物、または、前記第1および第2の磁場発生手段を移動させることにより、前記計測対象物を前記第1および第2の磁場発生手段の磁場中を順に移動させるものである
請求項2記載の計測装置。 - 前記移動手段は、前記計測対象物、または、前記第1および第2の磁場発生手段を回転移動させることにより、前記計測対象物を前記第1および第2の磁場発生手段の磁場中を順に通過させる回転移動手段である請求項7記載の計測装置。
- 前記第1または第2の磁場発生手段の一方は、核磁気共鳴を励起して計測するためのものであり、他方は、電子スピン共鳴を励起して計測するためのものである請求項7または8に記載の計測装置。
- 前記磁場発生手段は、所定の大きさを発生させる第1の磁場発生手段と、この第1の磁場発生手段の磁場とは異なる大きさの磁場を発生させる第2の磁場発生手段とを有するものであり、
前記移動手段は、計測対象物、または、前記第1および第2の磁場発生手段を移動させることにより、前記計測対象物を前記第1および第2の磁場発生手段の磁場中を順に移動させるものである
請求項3記載の計測装置。 - 前記移動手段は、前記計測対象物、または、前記第1および第2の磁場発生手段を回転移動させることにより、前記計測対象物を前記第1および第2の磁場発生手段の磁場中を順に通過させる回転移動手段である請求項10記載の計測装置。
- 前記第1または第2の磁場発生手段の一方は、核磁気共鳴を励起して計測するためのものであり、他方は、電子スピン共鳴を励起して計測するためのものである請求項10または11に記載の計測装置。
- 磁気共鳴を利用して計測対象物の画像を得る計測方法であって、
計測対象物、または、前記計測対象物の磁気共鳴を励起させるための磁場を発生させる磁場発生手段を移動させることにより、前記計測対象物を前記磁場発生手段の磁場中を移動させること、
前記計測対象物または前記磁場発生手段の移動中に停止することなく、前記計測対象物の前記磁場発生手段に対する移動方向yおよびこの移動方向yに対して直交する方向xのいずれか一方または両方に傾斜磁場を掛けて位相エンコードおよび周波数エンコードのいずれか一方または両方により、前記計測対象物中の計測画像信号を得ること、
前記計測画像信号に対し、前記y方向の移動の影響を補正した補正画像信号を得ること
を含む計測方法。 - 前記補正画像信号は、前記計測画像信号をS(kx,ky)、前記補正画像信号をS’(kx,ky)としたとき、式
(但し、kx,kyは前記x方向およびy方向の空間周波数、γは磁気回転比、Gy (n)はn回目の計測における前記位相エンコードまたは周波数エンコードの傾斜磁場強度、vyはy方向の移動速度、Δtyは前記位相エンコードまたは周波数エンコードの印加時間、ty0は前記位相エンコードまたは周波数エンコードの印加までの時間である。)
により得ることを特徴とする請求項13記載の計測方法。 - 前記前記補正画像信号は、前記計測画像信号をS(kx,ky,kz)、前記補正画像信号をS’(kx,ky,kz)としたとき、式
(但し、kx,ky,kzは前記x方向、y方向およびz方向の空間周波数、γは磁気回転比、Gy (n)はn回目の計測における前記位相エンコードまたは周波数エンコードの傾斜磁場強度、vyはy方向の移動速度、Δtyは前記位相エンコードまたは周波数エンコードの印加時間、ty0は前記位相エンコードまたは周波数エンコードの印加までの時間である。)
により得ることを特徴とする請求項13記載の計測方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/258,743 US8896311B2 (en) | 2009-03-26 | 2010-03-25 | Measurement device and measurement method |
| EP10756180.5A EP2412309A4 (en) | 2009-03-26 | 2010-03-25 | MEASURING INSTRUMENT AND MEASURING PROCEDURE |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009077389A JP5252444B2 (ja) | 2009-03-26 | 2009-03-26 | 計測装置および計測方法 |
| JP2009-077389 | 2009-03-26 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2010110384A1 true WO2010110384A1 (ja) | 2010-09-30 |
Family
ID=42781075
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2010/055264 WO2010110384A1 (ja) | 2009-03-26 | 2010-03-25 | 計測装置および計測方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8896311B2 (ja) |
| EP (1) | EP2412309A4 (ja) |
| JP (1) | JP5252444B2 (ja) |
| WO (1) | WO2010110384A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011052760A1 (ja) | 2009-10-29 | 2011-05-05 | 国立大学法人九州大学 | 生体内因性分子の検出方法 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150168510A1 (en) * | 2012-07-02 | 2015-06-18 | Kyushu University, National University Corporation | Magnetic Field Application Device |
| WO2014007122A1 (ja) | 2012-07-02 | 2014-01-09 | 日立金属株式会社 | 磁気回路 |
| US9810756B2 (en) | 2012-10-11 | 2017-11-07 | The Penn State Research Foundation | Zero- and low-field transport detection system |
| WO2014196525A1 (ja) * | 2013-06-03 | 2014-12-11 | 国立大学法人九州大学 | 計測装置及び計測方法 |
| DE202015103602U1 (de) * | 2015-06-18 | 2015-08-20 | Aspect Imaging Ltd. | Vorrichtung zur dreidimensionalen anatomischen Bildgebung und Bestrahlungstherapie |
| US11484258B2 (en) | 2016-06-13 | 2022-11-01 | Kyushu University, National University Corporation | Free radical consumption speed information acquisition method and NASH determination method |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006204551A (ja) | 2005-01-28 | 2006-08-10 | Kyushu Univ | 生体計測装置及びその方法 |
| WO2006117922A1 (ja) * | 2005-04-28 | 2006-11-09 | Hitachi Medical Corporation | 磁気共鳴撮影装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6912415B2 (en) * | 2001-04-09 | 2005-06-28 | Mayo Foundation For Medical Education And Research | Method for acquiring MRI data from a large field of view using continuous table motion |
| US6538444B2 (en) * | 2001-07-27 | 2003-03-25 | The University Of Chicago | Two dimensional B1-gradient NMR imager |
| US7123008B1 (en) * | 2002-04-19 | 2006-10-17 | Fonar Corporation | Positional magnetic resonance imaging |
| JP4991689B2 (ja) * | 2006-02-13 | 2012-08-01 | 株式会社日立メディコ | 磁気共鳴撮影装置および方法 |
| EP2115483B1 (en) * | 2007-02-28 | 2018-12-12 | Esaote S.p.A. | Mri apparatus comprising pivotable patient table |
| US8633693B2 (en) * | 2007-04-02 | 2014-01-21 | The Regents Of The University Of California | Rotating-frame gradient fields for magnetic resonance imaging and nuclear magnetic resonance in low fields |
-
2009
- 2009-03-26 JP JP2009077389A patent/JP5252444B2/ja not_active Expired - Fee Related
-
2010
- 2010-03-25 WO PCT/JP2010/055264 patent/WO2010110384A1/ja active Application Filing
- 2010-03-25 US US13/258,743 patent/US8896311B2/en not_active Expired - Fee Related
- 2010-03-25 EP EP10756180.5A patent/EP2412309A4/en not_active Withdrawn
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006204551A (ja) | 2005-01-28 | 2006-08-10 | Kyushu Univ | 生体計測装置及びその方法 |
| WO2006117922A1 (ja) * | 2005-04-28 | 2006-11-09 | Hitachi Medical Corporation | 磁気共鳴撮影装置 |
Non-Patent Citations (2)
| Title |
|---|
| "Abstracts of 129th Annual Meeting of Pharmaceutical Society of Japan 4, Organizing Committee for 129th Annual Meeting of Pharmaceutical Society of Japan, 05 March 2009 (05.03.2009)", article KAZUHIRO ICHIKAWA ET AL.: "Shiryo Hansogata OMRI Sochi ni Okeru Gazoka Algorithm", pages: 138 * |
| See also references of EP2412309A4 * |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011052760A1 (ja) | 2009-10-29 | 2011-05-05 | 国立大学法人九州大学 | 生体内因性分子の検出方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2412309A4 (en) | 2013-07-03 |
| EP2412309A1 (en) | 2012-02-01 |
| JP2010227247A (ja) | 2010-10-14 |
| US20120068705A1 (en) | 2012-03-22 |
| JP5252444B2 (ja) | 2013-07-31 |
| US8896311B2 (en) | 2014-11-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109658471B (zh) | 一种医学图像重建方法和系统 | |
| JP5252444B2 (ja) | 計測装置および計測方法 | |
| JP5574386B2 (ja) | 計測装置及び計測方法 | |
| WO2012077543A1 (ja) | 磁気共鳴イメージング装置及びコントラスト強調画像取得方法 | |
| US20100016708A1 (en) | Mri rf encoding using multiple transmit coils | |
| JP4717608B2 (ja) | 磁気共鳴イメージング装置 | |
| JP4138258B2 (ja) | 磁気共鳴イメージング装置 | |
| Finsterbusch | B0 inhomogeneity and shimming | |
| JP5808659B2 (ja) | 磁気共鳴イメージング装置及びT1ρイメージング法 | |
| JP5559506B2 (ja) | 磁気共鳴イメージング装置及び残留磁場抑制方法 | |
| US11935158B2 (en) | Systems and methods of on-the-fly generation of 3D dynamic images using a pre-learned spatial subspace | |
| JP7371120B2 (ja) | マッチした振動状態を有するmri | |
| JP2012095891A (ja) | 磁気共鳴イメージング装置 | |
| JP5758230B2 (ja) | 磁気共鳴イメージング装置及び反転rfパルス位相制御方法 | |
| Schwerter et al. | Advanced software and hardware control methods for improved static and dynamic B0 shimming in magnetic resonance imaging | |
| JP6546837B2 (ja) | 磁気共鳴イメージング装置、及び方法 | |
| CN114224314B (zh) | 一种磁共振成像系统及其乐音生成方法和装置 | |
| JP5942265B2 (ja) | 磁気共鳴イメージング装置及びrfパルス制御方法 | |
| Ullisch | A navigator-based rigid body motion correction for magnetic resonance imaging | |
| JP3163125B2 (ja) | Mri装置 | |
| JP2019050940A (ja) | 磁気共鳴画像化方法 | |
| JP3317552B2 (ja) | Mri装置 | |
| JPS6029684A (ja) | 核磁気共鳴による検査方法及び検査装置 | |
| JPS6244231A (ja) | 診断用磁気共鳴イメ−ジング装置 | |
| JP2017006522A (ja) | 磁気共鳴イメージング装置及びその磁場印加方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 10756180 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2010756180 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 13258743 Country of ref document: US |