WO2009150942A1 - 固定型等速自在継手 - Google Patents
固定型等速自在継手 Download PDFInfo
- Publication number
- WO2009150942A1 WO2009150942A1 PCT/JP2009/059745 JP2009059745W WO2009150942A1 WO 2009150942 A1 WO2009150942 A1 WO 2009150942A1 JP 2009059745 W JP2009059745 W JP 2009059745W WO 2009150942 A1 WO2009150942 A1 WO 2009150942A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- center
- joint
- track groove
- joint member
- track
- Prior art date
Links
Images








Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D3/00—Yielding couplings, i.e. with means permitting movement between the connected parts during the drive
- F16D3/16—Universal joints in which flexibility is produced by means of pivots or sliding or rolling connecting parts
- F16D3/20—Universal joints in which flexibility is produced by means of pivots or sliding or rolling connecting parts one coupling part entering a sleeve of the other coupling part and connected thereto by sliding or rolling members
- F16D3/22—Universal joints in which flexibility is produced by means of pivots or sliding or rolling connecting parts one coupling part entering a sleeve of the other coupling part and connected thereto by sliding or rolling members the rolling members being balls, rollers, or the like, guided in grooves or sockets in both coupling parts
- F16D3/223—Universal joints in which flexibility is produced by means of pivots or sliding or rolling connecting parts one coupling part entering a sleeve of the other coupling part and connected thereto by sliding or rolling members the rolling members being balls, rollers, or the like, guided in grooves or sockets in both coupling parts the rolling members being guided in grooves in both coupling parts
- F16D3/224—Universal joints in which flexibility is produced by means of pivots or sliding or rolling connecting parts one coupling part entering a sleeve of the other coupling part and connected thereto by sliding or rolling members the rolling members being balls, rollers, or the like, guided in grooves or sockets in both coupling parts the rolling members being guided in grooves in both coupling parts the groove centre-lines in each coupling part lying on a sphere
- F16D3/2245—Universal joints in which flexibility is produced by means of pivots or sliding or rolling connecting parts one coupling part entering a sleeve of the other coupling part and connected thereto by sliding or rolling members the rolling members being balls, rollers, or the like, guided in grooves or sockets in both coupling parts the rolling members being guided in grooves in both coupling parts the groove centre-lines in each coupling part lying on a sphere where the groove centres are offset from the joint centre
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D3/00—Yielding couplings, i.e. with means permitting movement between the connected parts during the drive
- F16D3/16—Universal joints in which flexibility is produced by means of pivots or sliding or rolling connecting parts
- F16D3/20—Universal joints in which flexibility is produced by means of pivots or sliding or rolling connecting parts one coupling part entering a sleeve of the other coupling part and connected thereto by sliding or rolling members
- F16D3/22—Universal joints in which flexibility is produced by means of pivots or sliding or rolling connecting parts one coupling part entering a sleeve of the other coupling part and connected thereto by sliding or rolling members the rolling members being balls, rollers, or the like, guided in grooves or sockets in both coupling parts
- F16D3/223—Universal joints in which flexibility is produced by means of pivots or sliding or rolling connecting parts one coupling part entering a sleeve of the other coupling part and connected thereto by sliding or rolling members the rolling members being balls, rollers, or the like, guided in grooves or sockets in both coupling parts the rolling members being guided in grooves in both coupling parts
- F16D3/2237—Universal joints in which flexibility is produced by means of pivots or sliding or rolling connecting parts one coupling part entering a sleeve of the other coupling part and connected thereto by sliding or rolling members the rolling members being balls, rollers, or the like, guided in grooves or sockets in both coupling parts the rolling members being guided in grooves in both coupling parts where the grooves are composed of radii and adjoining straight lines, i.e. undercut free [UF] type joints
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D3/00—Yielding couplings, i.e. with means permitting movement between the connected parts during the drive
- F16D3/16—Universal joints in which flexibility is produced by means of pivots or sliding or rolling connecting parts
- F16D3/20—Universal joints in which flexibility is produced by means of pivots or sliding or rolling connecting parts one coupling part entering a sleeve of the other coupling part and connected thereto by sliding or rolling members
- F16D3/22—Universal joints in which flexibility is produced by means of pivots or sliding or rolling connecting parts one coupling part entering a sleeve of the other coupling part and connected thereto by sliding or rolling members the rolling members being balls, rollers, or the like, guided in grooves or sockets in both coupling parts
- F16D3/223—Universal joints in which flexibility is produced by means of pivots or sliding or rolling connecting parts one coupling part entering a sleeve of the other coupling part and connected thereto by sliding or rolling members the rolling members being balls, rollers, or the like, guided in grooves or sockets in both coupling parts the rolling members being guided in grooves in both coupling parts
- F16D2003/22309—Details of grooves
Definitions
- the present invention relates to a fixed type constant velocity universal joint, and in particular, is a type that allows only angular displacement between two connected drive and driven shafts, and is used in power transmission systems of automobiles and various industrial machines.
- the present invention relates to an undercut-free type fixed type constant velocity universal joint including eight torque transmission balls.
- the fixed type constant velocity universal joint includes a Rzeppa type (BJ) (for example, Patent Document 1) and an undercut free type (UJ).
- BJ Rzeppa type
- UJ undercut free type
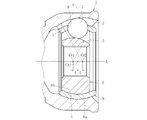
- the Rzeppa-type fixed type constant velocity universal joint includes an outer ring 3 as an outer joint member in which a plurality of track grooves 2 are formed along the axial direction at equal intervals in the circumferential direction on the inner spherical surface 1;
- An inner ring 6 as an inner joint member in which a plurality of track grooves 5 paired with the track grooves 2 of the outer ring 3 are formed in the outer spherical surface 4 along the axial direction at equal intervals in the circumferential direction, and the track grooves 2 of the outer ring 3
- a plurality of balls 7 that are interposed between the track grooves 5 of the inner ring 6 and transmit torque, and a cage 8 that is interposed between the inner spherical surface 1 of the outer ring 3 and the outer spherical surface 4 of the inner ring 6 and holds the balls 7.
- a plurality of window portions 9 in which the balls 7 are accommodated are arranged in the cage 8 along the circumferential direction.
- the cage 8 is in spherical contact with the inner spherical surface of the outer ring 3 and the outer spherical surface of the inner ring 6.
- the curvature centers (O2, O1) of the ball center locus lines of the track grooves 2, 5 of the outer ring 3 and the inner ring 6 are respectively symmetrical with respect to the joint center Oj.
- the curvature center O1 and the curvature center O2 are offset from the joint center Oj by an equal distance in the opposite direction and offset in the axial direction.
- the track groove 2 of the outer ring 3 is offset from the joint center Oj by a predetermined distance along the joint center axis X toward the joint opening side, and the track groove 5 of the inner ring 6 is offset from the joint center Oj along the joint center axis X.
- the part is offset by a predetermined distance.
- the joint center axis X is a straight line including the axis of the outer ring 3 and the axis of the inner ring 6 when the operating angle of the joint is 0 °.
- the joint center plane is a plane that includes the center of the torque transmission ball 7 and is orthogonal to the joint center axis.
- the joint center Oj is the intersection of the joint center plane and the joint center axis.
- the torque transmitting ball track formed by the track groove 2 of the outer ring 3 and the track groove 5 of the inner ring 6 has a wedge shape that gradually spreads from one to the other in the axial direction.
- Each ball 7 is accommodated in this wedge-shaped torque transmission ball track, and transmits torque between the outer ring 3 and the inner ring 6.
- a cage 8 is incorporated to hold all the balls 7 in the joint plane (plane perpendicular to the bisector of the operating angle).
- the fixed-type constant velocity universal joint of the Rzeppa type has a structure with six torque transmission balls that has been used for many years as a technical standard, and has gained the support of many users in terms of performance and reliability. It was.
- the applicant of the present invention has achieved a high-efficiency, radically light and compact design while ensuring strength, load capacity, and durability equivalent to or better than the 6-ball Zeppa joint as the technical standard.
- a ball zepper joint has been developed and already proposed (for example, Patent Document 1 below).
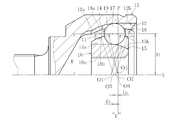
- the UJ type fixed type constant velocity universal joint is an outer joint member in which a plurality of track grooves 12 are formed on the inner diameter surface 11 along the axial direction at equal intervals in the circumferential direction.
- a plurality of window portions 19 in which the balls 17 are accommodated are arranged in the cage 18 along the circumferential direction.
- the track groove 12 of the outer ring 13 includes an inner track groove 12a in which the track groove ball center locus line is an arc portion, and an opening side track groove 12b in which the track groove ball center locus line is a straight portion parallel to the outer ring axis. It consists of.
- the back side track groove 12a has its center of curvature O2 shifted from the joint center Oj in the axial direction toward the opening side of the outer ring 13.
- the track groove 15 of the inner ring 16 includes a back-side track groove 15a in which the track groove ball center locus line is a straight portion parallel to the inner ring axis, and an opening-side track groove 15b in which the track groove ball center locus line is an arc portion. Consists of.
- the center of curvature O1 of the opening-side track groove 15b is provided at an equal distance F away from the joint center Oj in the axial direction on the back side opposite to the center of curvature O2 of the back-side track groove 12a of the outer ring 13.
- the track shape of the UJ type outer ring 13 is undercut free with a straight opening on the track shape of the UJ type outer ring 13 in contrast to the Rzeppa type in which the entire region is an arc shape.
- the interference angle between the shaft (the shaft fitted into the inner ring) and the track groove 12 of the outer ring 13 is increased, and the UJ type is changed to the BJ type.
- a larger operating angle can be obtained.
- the track shape of the UJ type outer ring 13 is a straight shape on the opening side, the movement amount of the ball 17 in the radial direction increases in the outer diameter side direction, and the ball 17 is held correspondingly. Therefore, the outer diameter of the cage 18 is also increased. For this reason, the inner spherical diameter of the outer ring 13 is increased.
- the track depth refers to the joint internal force analysis in the rotating state, and from the ball contact point at the position where the contact ellipse of the ball moving in the axial direction and the contact angle direction in the single rotation is closest to the spherical surface. Expressed as the distance to the sphere.
- the UJ type has a larger ball diameter than the Rzeppa type at the same size, and the pitch circle PCD of the ball, and thus the outer diameter of the outer ring. It is also bigger.
- the UJ type shown in FIG. 14 has a cage offset shape that is effective in ensuring the depth of the outer ring inner track. That is, with respect to the joint center Oj, the center O4 of the outer spherical surface 18a of the cage 18 is offset by fc toward the axial opening side, and the center O3 of the inner spherical surface 18b of the cage 18 is offset by fc toward the rear side in the axial direction. .
- Such a cage offset type is called a track direction cage offset.
- Patent Document 1 An 8-ball UJ type joint having a smaller outer diameter compared to the 6-ball type has also been proposed (Patent Document 1). Since the 8-ball UJ type joint has a smaller ball diameter than the 6-ball, the radius of the cage corresponding to the above-mentioned radial movement amount determined by the PCR and the offset amount regardless of the size and number of balls.
- the offset amount is set small so that the directional dimension (thickness) can be secured, and a cage offset is adopted as shown in FIG.
- PCR is the length of the line segment connecting the center of the arc of the track groove of the outer ring or the center of the arc of the track groove of the inner ring and the center of the ball.
- the track groove of the outer ring is formed by an opening side first guide groove centered on the joint center and a back side second guide groove centered on a point offset from the joint center to the opposite side in the radial direction. is doing. Further, the inner side track groove is further opposite in the radial direction from the center of the back side second track groove and the back side second track groove centered on the point offset from the joint center to the back side along the joint center axis. And an opening-side second guide groove with the point offset at the center.
- the depth of the first guide groove on the back side of the outer ring is increased. Further, the thickness of the inner ring is increased at the opening-side second guide groove of the inner ring. For this reason, when the joint takes a high operating angle, the ball does not ride on the first guide groove on the inner side of the outer ring and the edge portion of the groove is not chipped, and the inner ring is damaged by a load from the ball. Will not be lost.
- the center of the track groove of the outer ring and the center of the track groove of the inner ring are spaced apart from each other by an equal distance from the diametrical surface (joint center surface) in the axial direction, and opposite from the joint center axis in the radial direction. It is offset to a position separated by a predetermined amount on the side.
- the center of curvature of the groove center line of the outer ring track groove and the inner ring track groove is eccentric to both sides of the joint center plane and exceeds the axis center on a plane including the groove center line and the axis center. It is set to be on the opposite side.
- the maximum allowable angle of the joint angle can be increased, and the strength is ensured without increasing the outer diameter of the outer ring.
- Patent Document 5 there is one that can increase the maximum bending angle without affecting the running characteristics. That is, in Patent Document 5, the intersection angle between the tangent to the trajectory curve and the joint rotation axis monotonously increases starting from the point where the distance between the base of the traveling path and the joint rotation axis is the maximum value. It is what you do.
- An object of the present invention is to provide an undercut-free type fixed constant velocity universal joint with eight balls capable of improving the torque capacity at a high operating angle while ensuring durability at a low operating angle. It is to provide.
- an outer joint member in which eight track grooves extending in the axial direction are formed on the inner diameter surface, and eight track grooves extending in the axial direction are formed on the outer diameter surface.
- the inner joint member, the track groove of the outer joint member and the corresponding track groove of the inner joint member are formed in cooperation with the eight torque transmission ball tracks, and the torque transmission ball tracks are arranged respectively.
- An undercut free type comprising eight torque transmission balls and a cage having a pocket for holding the torque transmission balls, and having a curved portion and a straight portion on the track groove bottom surface of the outer joint member and the track groove bottom surface of the inner joint member.
- a fixed type constant velocity universal joint wherein the joint operating axis is 0 °, and a straight line including the axis of the outer joint member and the axis of the inner joint member is a joint center axis,
- the center of the track groove of the outer joint member and the center of the track groove of the inner joint member when the plane that includes the center of the torque transmission ball and is orthogonal to the joint central axis is the joint center plane, respectively,
- the outer spherical center of the cage and the inner spherical center of the cage are offset to a position spaced apart on both sides in the axial direction from the central plane and spaced away from the joint central axis on the opposite side in the radial direction with respect to the track grooves.
- Rt the distance between the center of the track groove of the outer joint member or the center of the track groove of the inner joint member and the center of the torque transmitting ball, or the center of the track groove of the outer joint member or
- the radial offset amount which is 0.087 and the distance between the center of the track groove of the outer joint member or the center of the track groove of the inner joint member and the joint center axis line, is fr
- the second fixed type constant velocity universal joint of the present invention has an outer joint member in which eight track grooves extending in the axial direction are formed on the inner diameter surface, and eight track grooves extending in the axial direction on the outer diameter surface.
- the formed inner joint member, the track groove of the outer joint member and the corresponding track groove of the inner joint member are formed in cooperation with each other, and eight torque transmission ball tracks are respectively arranged on the torque transmission ball track.
- Type fixed-type constant velocity universal joint and when the joint operating angle is 0 °, the straight line including the axis of the outer joint member and the axis of the inner joint member is the joint center axis
- the center of the track groove of the outer joint member and the center of the track groove of the inner joint member when the plane including the center of the torque transmission ball and perpendicular to the joint central axis is a joint center plane
- the outer spherical center of the cage is offset from the joint center plane to both sides in the axial direction and is spaced from the joint central axis to the opposite side of the track groove in the radial direction.
- the inner spherical center of the cage is arranged closer to the center side of the track groove of the outer joint member than the joint center, and the outer spherical center of the cage or the inner spherical center of the cage and the joint central plane.
- Rt is the distance between the center of the track groove of the outer joint member or the center of the track groove of the inner joint member and the center of the torque transmitting ball, or the center of the track groove of the outer joint member or the inner joint member
- the track depth refers to the joint internal force analysis in the rotating state, and from the ball contact point at the position where the contact ellipse of the ball moving in the axial direction and the contact angle direction in the single rotation is closest to the spherical surface. The distance to the sphere. The greater the distance from the ball contact point to the spherical surface, the better the durability.
- the groove depth of the inner side of the joint of the track groove is relatively less than when no radial offset is provided. Become bigger. Therefore, the rigidity of the side wall of the joint deep part of the track groove is increased. As a result, when the joint takes a high operating angle and the torque transmission ball transmits torque at a position close to the joint groove back side of the track groove, deformation of the edge portion of the track groove joint back side wall part is suppressed. The torsional strength of the joint in the high operating angle range is improved.
- the torque capacity in the high operating angle region is increased, and the edge load at the side wall of the joint in the track groove is reduced. As a result, the durability of the joint in the high operating angle region is improved.
- the torque capacity is a torque at which the end of the contact ellipse of the contact portion between the torque transmission ball and the track groove overlaps with the edge line of the track groove when the torque is transmitted while taking a certain operating angle. is there.
- R2 0.01 or less, it is possible to prevent the thickness of the cage opening side from becoming thin.
- the constant velocity universal joint is used for connecting a drive shaft of an automobile, for example.
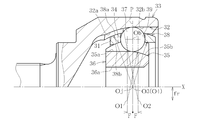
- the fixed type constant velocity universal joint of this embodiment is arranged on the fixed side (wheel side) of a drive shaft of an automobile, for example, and as shown in FIGS. 1 and 2, a plurality (eight) are provided on the inner diameter surface 31.
- the outer ring 33 as an outer joint member formed with the track grooves 32 along the axial direction at equal intervals in the circumferential direction, and a plurality of (eight) tracks paired with the track grooves 32 of the outer ring 33 on the outer diameter surface 34.
- the inner ring 36 as an inner joint member in which the grooves 35 are formed along the axial direction at equal intervals in the circumferential direction, and the track groove 32 of the outer ring 33 and the track groove 35 of the inner ring 36 are formed in cooperation with each other.
- the cage 38 is provided with a plurality of window portions 39 in which the balls 37 are accommodated along the circumferential direction.
- a tooth mold (serration or spline) 36a for connecting the shaft portion to the inner diameter surface of the inner ring 36 is formed.
- the track groove 32 of the outer ring 33 includes an inner track groove 32a in which the track groove ball center locus line is a curved portion (arc portion), and an opening side track groove in which the track groove ball center locus line is a straight portion parallel to the outer ring axis. 32b.
- the track groove 35 of the inner ring 36 has an inner track groove 35a in which the track groove ball center locus line is a straight portion parallel to the inner ring axis, and an opening side in which the track groove ball center locus line is a curved portion (arc portion). It consists of a track groove 35b.
- the track groove 32 of the outer ring 33 and the track groove 35 of the inner ring 36 have a Gothic arch shape formed only by forging, or by shaving after forging.
- the track grooves 32, 35 and the ball 37 are in an angular contact by using a Gothic arch shape. That is, the ball 37 is in contact with the track groove 32 of the outer ring 33 at two points C11 and C12, and is in contact with the track groove 35 of the inner ring 36 at two points C21 and C22.
- An angle formed by contact points C11, C12, C21, and C22 between the center Ob of the ball 37 and the track grooves 32 and 35 with respect to the line segment P1 passing through the center Ob of the ball 37 and the joint center Oj is a contact angle ⁇ .
- the contact angles ⁇ of the contact points C11, C12, C21, C22 are all set equal.
- FIG. 1 and 2 show a state in which the operating angle ⁇ of the joint is 0 °.
- the axis of the outer ring 33 and the axis of the inner ring 36 coincide with each other on the straight line X, and all torques are shown.
- a plane P including the center Ob of the transmission ball 37 is orthogonal to the straight line X.
- the straight line X is referred to as a joint center axis X
- the plane P is referred to as a joint center plane P
- the intersection of the joint center plane P and the joint center axis X is referred to as a joint center Oj.
- the center (curvature center) O2 of the inner side track groove 32a of the track groove 32 of the outer ring 33 is separated from the joint center plane P by the axial distance F from the joint opening side (right side in FIG. 2).
- the center O1 of the opening-side track groove 35b of the track groove 35 of the inner ring 36 is separated from the joint center plane P by the axial distance F from the joint back side (left side in the figure) and from the joint center axis X.
- the track groove 35 is offset to a position separated by a radial distance fr on the opposite side in the radial direction.
- the axial distance (F) between the centers O2, O1 of the track grooves 32, 35 and the joint center plane P is defined as the axial offset amount F
- the radial distance (fr) between the curvature centers O2, O1 and the joint center axis X is referred to as a radial offset amount fr.
- the track groove 32 of the outer ring 33 and the track groove 35 of the inner ring 36 have the same axial offset amount F and the same radial offset amount fr.
- the center O4 of the outer spherical surface 38a of the cage 38 and the center O3 of the inner spherical surface 38b of the cage 38 are both on the joint center Oj.
- the distance between the center (curvature center) O2 of the track groove 32 of the outer ring 33 or the center (curvature center) O1 of the track groove 35 of the inner ring 36 and the center Ob of the torque transmission ball 37 is Rt.
- F is the axial distance between the center O2 of the track groove 32 of the outer ring 33 or the center O1 of the track groove 35 of the inner ring 36 and the joint center plane P (the axial offset amount)
- the radial offset amount which is the distance between the center (curvature center) O2 of the track groove 32 of the outer ring 33 or the center (curvature center) O1 of the track groove 35 of the inner ring 36 and the joint center axis X
- FIG. 4 and FIG. 5 show a second embodiment of the present invention.
- the outer spherical center O4 of the cage 38 is disposed closer to the track groove center O1 side of the inner ring 36 than the joint center Oj, and the inner spherical center O3 of the cage 38 is closer to the outer ring 33 than the joint center Oj. It is arranged on the center O2 side of the track groove. That is, the outer spherical surface center O4 of the cage 38 and the inner spherical surface center O3 of the cage 38 are offset from the joint center Oj by fc in the axial direction.
- Such a cage offset type is called an anti-track direction cage offset opposite to the track direction cage offset of FIG.
- the center (curvature center) O2 of the inner side track groove 32a of the track groove 32 of the outer ring 33 is separated from the joint center plane P by the axial distance F from the joint opening side, and , And offset from the joint center axis X to a position separated from the track groove 32 by a radial distance fr on the opposite side in the radial direction.
- the center O1 of the opening side track groove 35b of the track groove 35 of the inner ring 36 is separated from the joint center plane P toward the joint back side by an axial distance F, and from the joint center axis X to the track groove 35.
- they are offset to a position separated by a radial distance fr on the opposite side in the radial direction.
- the axial distance from the outer spherical center O4 of the cage 38 (center of the inner surface of the outer ring 33) or the inner spherical surface O3 of the cage 39 (center of the outer surface of the inner ring 36) to the joint center plane P is fc, and torque is transmitted.
- the structure offset in the radial direction has good operability up to an offset amount smaller than that of the conventional product.
- the amount of deviation from the joint center Oj of the inner ring 36 mainly caused by the gap is smaller than that of the conventional product.
- the track groove in which eight track loads are generated in the state where the working angle is taken is caused by the fact that the track groove is positioned radially outward from the joint center axis X as compared with the conventional product. This is because the direction and amount of displacement of the inner ring 36 differ depending on the positional relationship of the balls supporting the inner ring 36.
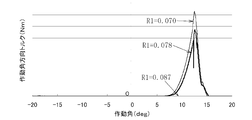
- the shaft is bent in the operating angle direction from the operating angle of ⁇ 20 ° to + 20 ° with no torsional torque. That is, the bending resistance torque value in the working angle direction when bent was calculated by mechanism analysis.
- the clearance between the ball 37 and the track groove 35 of the inner ring 36 and the clearance between the ball 37 and the track groove 32 of the outer ring 33 is the clearance of what is usually mass-produced in this type of fixed type constant velocity universal joint. It was.
- the gap between the inner spherical surface (inner diameter surface) 31 of the outer ring 33 and the cage outer spherical surface is smaller than the actual gap, and the gap between the outer spherical surface (outer diameter surface) 34 of the inner ring 36 and the cage inner spherical surface 38b is larger than a normal one.
- the amount of gap was used.
- the gap between the window portion 39 of the cage 38 and the ball 37 is a negative gap smaller than the normal negative gap. That is, the bending resistance torque value in the operating angle direction is likely to be generated and the operability is deteriorated.
- FIG. 7 shows the analysis result of eight balls having a conventional structure that is not offset in the radial direction (cage offset in the track center direction).
- the thin line indicates the case where R1 is 0.070
- the thick line indicates the case where R1 is 0.078
- the middle line indicates the case where R1 is 0.087.
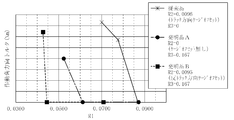
- FIG. 8 shows the result of comparing the R1 value for the product of the present invention under the same clearance conditions and comparing the maximum torque value with the conventional product from the above analysis for the R1 value.
- the solid line indicates a conventional product (track groove that is not offset in the radial direction and has a cage offset shape), and the alternate long and short dash line indicates the product of the present invention (referred to as product A of the present invention) shown in FIG.
- the broken line indicates the product of the present invention (referred to as product B of the present invention) shown in FIG.
- the structure offset in the radial direction as the product of the present invention has good operability up to an offset amount smaller than that of the conventional product.
- the developed product has a smaller amount of deviation from the joint center of the inner ring, which is mainly caused by the gap, compared to the conventional product.
- the track position where the track load is generated in the state where the working angle is taken is the conventional position because the track of the invention product is positioned radially outward from the center axis than the conventional product.
- the product is different from the developed product. That is, the direction and the amount of displacement of the inner ring differ depending on the positional relationship of the balls supporting the inner ring.
- FIG. 9 and FIG. 10 show the track depth value of the outer ring 33 under the durability test condition at the normal angle (6 °).
- FIG. 9 shows the relationship between R1 and the track depth of the outer ring 33.
- FIG. 10 shows the relationship between R3 and the track depth of the outer ring 33.
- the track depth is a ball that moves in the axial direction and the contact angle ⁇ direction in the track during one rotation by analyzing the internal force of the joint in a rotating state under a normal condition of a large torque (operating angle 6 °).
- the distance L from the ball contact point to the spherical surface at the position where the contact ellipse 51 is closest to the spherical surface see FIG. 3).
- the ball contact ellipse 51 becomes large due to a large load on the track, and the contact ellipse 51 protrudes from the inner diameter surface of the outer ring 33 and peeling occurs from the edge load.
- the longer the distance L from the ball contact point to the spherical surface portion the better the durability.
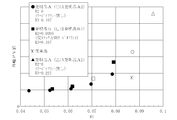
- FIG. 11 shows the PV value of the outer ring from the analysis result under the normal angle (6 °) durability test condition.
- the PV value is obtained by multiplying the sliding speed between the ball and the track and the track load. The smaller the PV value, the better the durability. From the analysis results, the smaller the R1 value, the smaller the PV value. However, when the R1 value is 0.071 or less, the decrease in the PV value slows down.
- the B type (cage offset product) is advantageous because a small R1 value can be obtained.
- the PV value of the inner ring 36 has a relationship that increases as the R1 value is decreased, contrary to the outer ring.
- each ⁇ , ⁇ , ⁇ , ⁇ , ⁇ invention product in FIG. 11 indicates a fixed type constant velocity universal joint of the same type as each ⁇ , ⁇ , ⁇ , ⁇ , ⁇ shown in FIG. Yes.
- FIG. 12 shows the track depth from the analysis result when a torque of 250 Nm is applied at an operating angle of 46 °.
- the depth is the same as the conventional depth.
- the preferred range of R1 is 0.061 to 0.087 for the A type and 0.044 to 0.087 for the B type.
- the lower bound value in this case is the limit value of operability, as can be seen from FIG.
- the upper limit is a range in which a normal angle durability test result and a track depth, which will be described later, can be secured more than the conventional products.
- 0.061 to 0.071 for the A type and 0.044 to 0.071 for the B type are more preferable ranges. This is a range in which the PV value is below the conventional product from FIG. By setting the upper limit range, the track depth is further increased and the durability is further improved.
- R2 is preferably 0.01 or less. This is because if R2 exceeds 0.01, the wall thickness on the opening side (joint opening side) of the cage 38 becomes thin, and the strength may decrease.
- R3 is preferably 0.07 to 0.19. That is, as can be seen from FIG. 12, at a suitable R1 value of 0.087, the track depth is set to 0.07 or more, which is assured as in the conventional product. Further, it is set to 0.19 or less that can be secured as in the conventional product from the track depth at the normal angle endurance described later (see FIG. 10).
- the groove on the joint back side portion of the track groove 32 is compared with a case where no radial offset is provided.
- the depth becomes relatively large. Therefore, the rigidity of the joint back side wall portion of the track groove 32 is increased. For this reason, when the joint takes a high operating angle and the torque transmission ball 37 transmits torque at a position close to the joint back side of the track groove 32, the deformation of the edge portion of the joint back side wall portion of the track groove 32 is deformed. Is suppressed, and the torsional strength of the joint in the high operating angle region is improved.
- the torque capacity in the high operating angle region increases.
- the torque capacity means that the end of the contact ellipse of the contact portion between the torque transmission ball 37 and the track groove 32 is the edge line of the track groove 32 when transmitting torque while taking a certain operating angle. Overlapping torque.
- the torque capacity on the inner side of the outer ring is increased at a high operating angle, the rigidity of the track groove wall surface is improved, the deformation of the track edge portion is suppressed, and the torsional strength is improved.
- the track depth on the inner side of the outer ring increases at a high operating angle, the riding torque is improved, the edge load is reduced, and the durability at a high operating angle is improved.
- the present invention has been described.
- the present invention is not limited to the above-described embodiment, and various modifications are possible.
- the axial offset amount, the radial offset amount, the cage offset amount, etc. , R1, R2, and R3 can be arbitrarily set within a range where the optimum values are obtained.
- the R1 value can be set low by improving the operability due to the radial offset, the outer spherical surface center O4 of the cage 38 is arranged closer to the center O2 side of the track groove 32 of the outer ring 33 than the joint center Oj.
- the inner spherical surface center O3 may be disposed closer to the center O1 side of the track groove 35 of the inner ring 36 than the joint center Oj.
- the fixed type constant velocity universal joint according to the present invention is not limited to a drive shaft, but can be used for a propeller shaft and a power transmission system of various other industrial machines.
- the curved portions of the track grooves 32 and 35 are formed as a single arc. You may form with a circular arc. If the curved portion is a single circular arc, there are advantages that the processing is easy and the manufacturing cost is low.
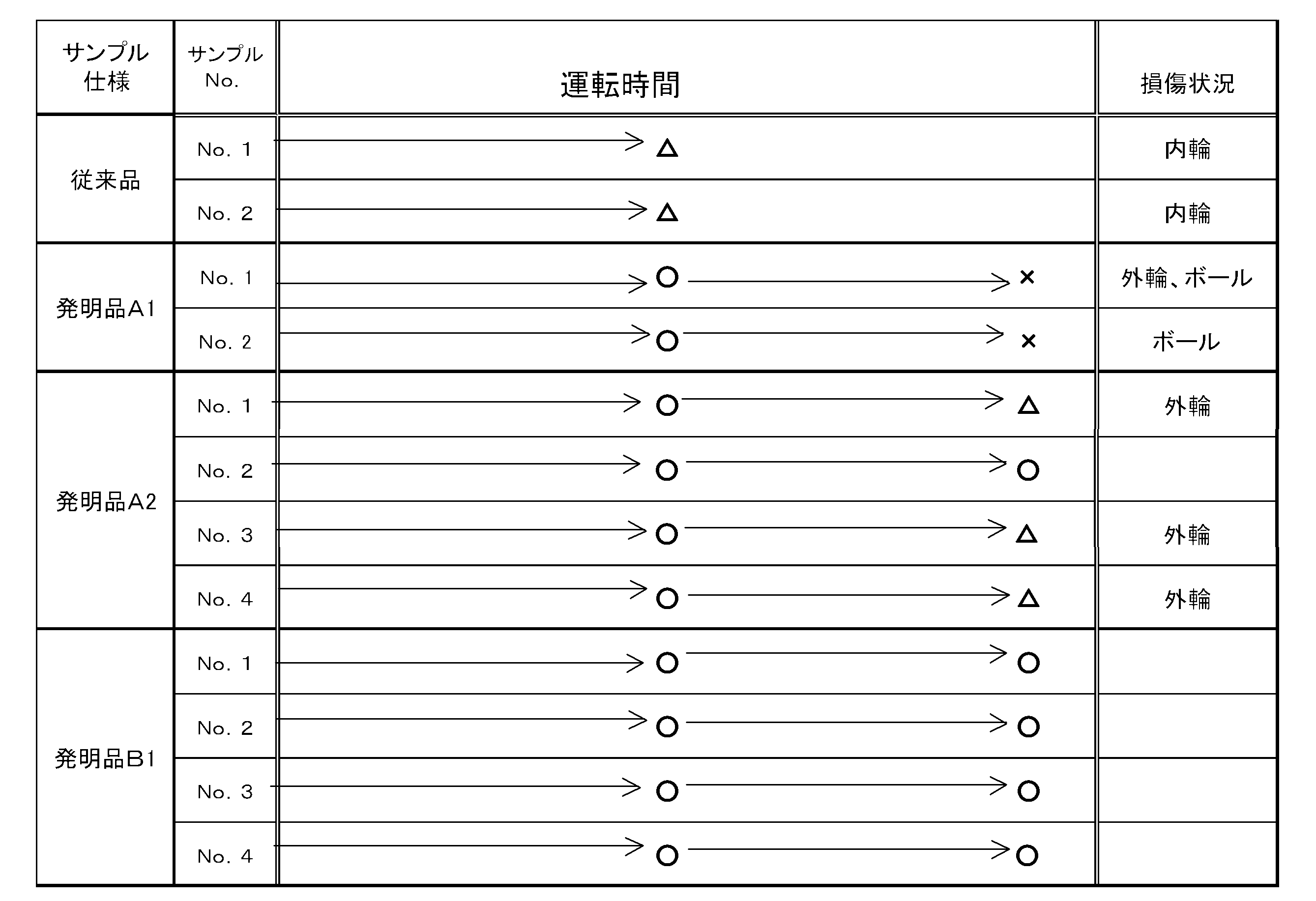
- Example 1 A service angle (operating angle 6 °) durability test under a large torque condition was performed, and the results are shown in Table 2 below.
- two samples of the conventional product (conventional product No. 1, conventional product No. 2, 2) are manufactured, and two samples of the invention product A1 (invention product A1 No. 1, 1, product A1 No. 2) are manufactured.
- 4 samples of invention product A2 and invention product B (invention product A2No, 1, invention product A2No, 2, invention product A2No, 3, invention product A2No, 4, invention product B1No, 1, invention product B1No, 2.
- the durability test was performed under the conditions of a torque of 834 Nm and a rotation speed of 230 r / min.
- the conventional product has a defect from the inner ring, but the inventive product has no problem with the inner ring. This is because the track main curvature is large because the radius of the arc of the inner ring is large due to the offset in the radial direction, thereby reducing the surface pressure.
- the analysis results of the track depth and PV Similarly, it has been confirmed that the defects occurring in the outer ring are more durable as the track depth is deeper and the PV value is lower. It can be seen that the invention product is better in durability than the conventional product.
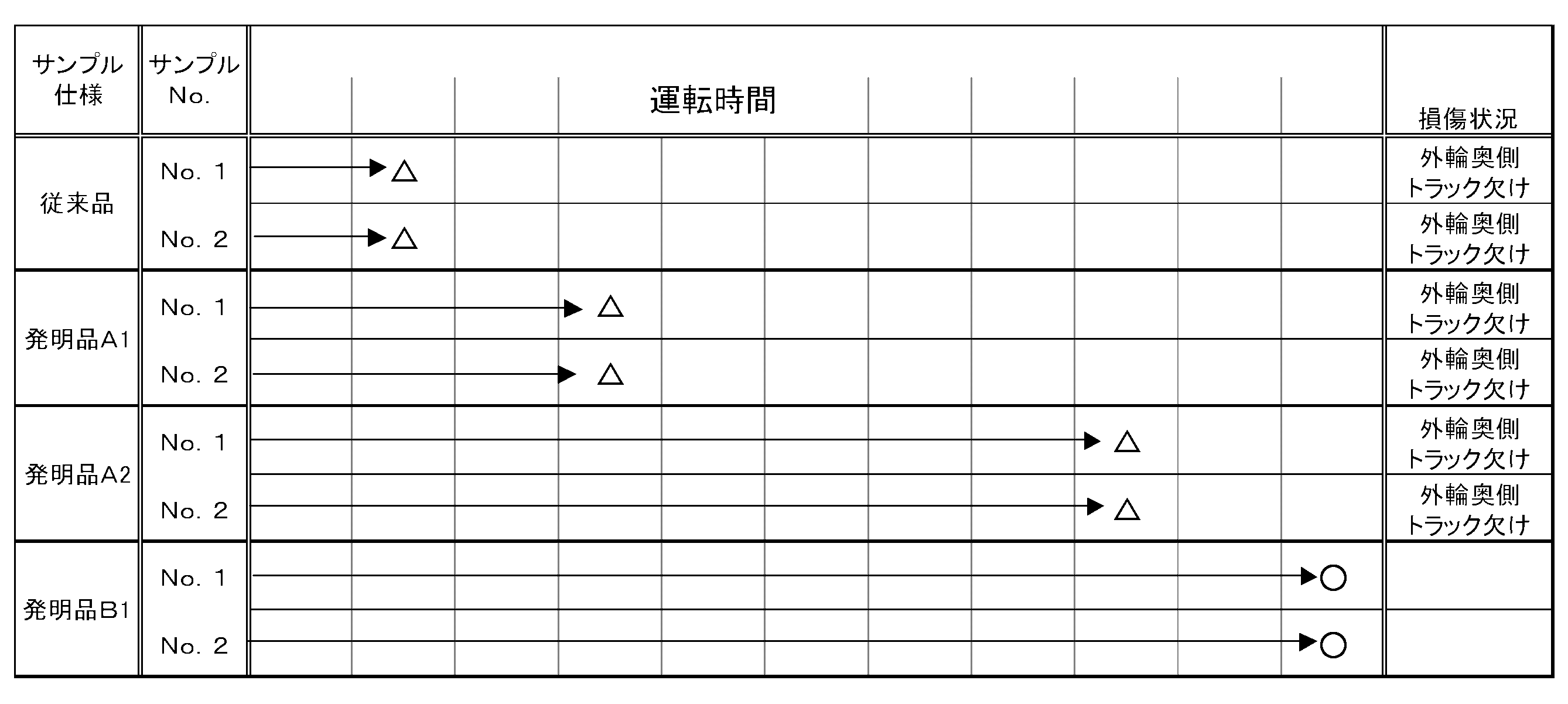
- Example 2 Next, a durability test at a high angle was performed, and the results are shown in Table 3 below.
- two samples of the conventional product (conventional product No. 1, conventional product No. 2,) are manufactured, and two samples of the invention product A1, invention product A2, and invention product B (invention product A1 No. 1, 1, Invention A1No, 2, Invention A2No, 1, Invention A2No, 2 Invention B1No, 1, Invention B1No, 2,)).
- the durability test was performed under the conditions of a torque of 549 Nm, an angle of 0 to 46 ° (swing), and a rotational speed of 80 r / min.
- the inventive product No. 1 and the conventional product No. 2 had a defect due to the track missing on the back side of the outer ring.
- the invention A1No, 1 and the invention A1No, 2 had a problem due to a track chip at the back side of the outer ring.
- the invention A2No, 1 and the invention A2No, 2 suffered a problem due to a chipped track on the back side of the outer ring.
- Invention B1No, 1 and Invention B1No, 2 did not cause any problems even after an operating time of 18.5 hours.
- the inventive product has improved durability compared to the conventional product.
- Invention B1 is excellent.
- the fixed type constant velocity universal joint according to the present invention is not limited to a drive shaft, and can be used for a power transmission system of a propeller shaft and various other industrial machines.
- the curved portion of the track groove may be constituted by a single arc or a plurality of arcs. If the curved portion is a single circular arc, there are advantages that the processing is easy and the manufacturing cost is low.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Rolling Contact Bearings (AREA)
- Power Steering Mechanism (AREA)
Abstract
Description
が従来品と開発品で異なっており、このことから内輪36を支えるボールの位置関係の違いにより内輪36のずれる方向及びずれる量が異なってくるためである。

大きなトルク条件での常用角(作動角6°)耐久試験を行って、その結果を次の表2に表した。この場合、従来品のサンプルを2個(従来品No,1、従来品No,2)製作し、前記発明品A1のサンプルを2個(発明品A1No,1、発明品A1No,2)製作し、前記発明品A2及び発明品Bのサンプルをそれぞれ4個(発明品A2No,1、発明品A2No,2、発明品A2No,3、発明品A2No,4、発明品B1No,1、発明品B1No,2、発明品B1No,3、発明品B1No,4)製作した。トルク834Nm、回転速度230r/minの条件で耐久試験を行なった。
次に高角での耐久試験を行い、その結果を次の表3に表した。この場合、従来品のサンプルを2個(従来品No,1、従来品No,2)製作し、発明品A1、発明品A2、及び発明品Bのサンプルを2個(発明品A1No,1、発明品A1No,2、発明品A2No,1、発明品A2No,2発明品B1No,1、発明品B1No,2、)製作した。トルク549Nm,角度0~46°(揺動),回転速度80r/minの条件で耐久試験を行なった。
37 トルク伝達ボール
38 ケージ
Claims (6)
- 内径面に軸方向に延びる8本のトラック溝を形成した外側継手部材と、外径面に軸方向に延びる8本のトラック溝を形成した内側継手部材と、外側継手部材のトラック溝とこれに対応する内側継手部材のトラック溝とが協働して形成される8本のトルク伝達ボールトラックと、該トルク伝達ボールトラックにそれぞれ配された8個のトルク伝達ボールと、トルク伝達ボールを保持するポケットを有するケージとを備え、外側継手部材のトラック溝底面及び内側継手部材のトラック溝底面に曲線部とストレート部を有するアンダーカットフリータイプの固定型等速自在継手であって、
継手の作動角が0°の状態で、前記外側継手部材の軸線と前記内側継手部材の軸線とを含む直線を継手中心軸線、前記トルク伝達ボールの中心を含み、前記継手中心軸線と直交する平面を継手中心面としたとき、
前記外側継手部材のトラック溝の中心と前記内側継手部材のトラック溝の中心とが、それぞれ、前記継手中心面から軸方向両側に離間し、かつ、前記継手中心軸線からこれらトラック溝に対して半径方向反対側に離間した位置にオフセットされているとともに、前記ケージの外球面中心とケージの内球面中心とを一致させ、
前記外側継手部材のトラック溝の中心又は前記内側継手部材のトラック溝の中心と前記トルク伝達ボールの中心との間の距離をRt、前記外側継手部材のトラック溝の中心又は前記内側継手部材のトラック溝の中心と前記継手中心面との間の軸方向距離をFとしたとき、FとRtとの比R1(=F/Rt)が0.061≦R1≦0.087であり、かつ、前記外側継手部材のトラック溝の中心又は前記内側継手部材のトラック溝の中心と前記継手中心軸線までの距離である半径方向オフセット量をfrとしたとき、frと前記Rtとの比R3(=fr/Rt)が0.07≦R3≦0.19であることを特徴とする固定型等速自在継手。 - 内径面に軸方向に延びる8本のトラック溝を形成した外側継手部材と、外径面に軸方向に延びる8本のトラック溝を形成した内側継手部材と、外側継手部材のトラック溝とこれに対応する内側継手部材のトラック溝とが協働して形成される8本のトルク伝達ボールトラックと、該トルク伝達ボールトラックにそれぞれ配された8個のトルク伝達ボールと、トルク伝達ボールを保持するポケットを有するケージとを備え、外側継手部材のトラック溝底面及び内側継手部材のトラック溝底面に曲線部とストレート部を有するアンダーカットフリータイプの固定型等速自在継手であって、
継手の作動角が0°の状態で、前記外側継手部材の軸線と前記内側継手部材の軸線とを含む直線を継手中心軸線、前記トルク伝達ボールの中心を含み、前記継手中心軸線と直交する平面を継手中心面としたとき、
前記外側継手部材のトラック溝の中心と前記内側継手部材のトラック溝の中心とが、それぞれ、前記継手中心面から軸方向両側に離間し、かつ、前記継手中心軸線からこれらトラック溝に対して半径方向反対側に離間した位置にオフセットされ、
ケージの外球面中心が継手中心面よりも内側継手部材のトラック溝の中心側に配置されるとともに、ケージの内球面中心が継手中心面よりも外側継手部材のトラック溝の中心側に配置されて、ケージの外球面中心又はケージの内球面中心と継手中心面までの軸方向距離をfcとし、トルク伝達ボールの中心から継手中心軸線までの距離をRとしたとき、fcとRとの比R2(=fc/R)が0.01以下とし、
前記外側継手部材のトラック溝の中心又は前記内側継手部材のトラック溝の中心と前記トルク伝達ボールの中心との間の距離をRt、前記外側継手部材のトラック溝の中心又は前記内側継手部材のトラック溝の中心と前記継手中心面との間の軸方向距離をFとしたとき、FとRtとの比R1(=F/Rt)が0.044≦R1≦0.087であり、かつ、前記外側継手部材のトラック溝の中心又は前記内側継手部材のトラック溝の中心と前記継手中心軸線までの距離である半径方向オフセット量をfrとしたとき、frと前記Rtとの比R3(=fr/Rt)が0.07≦R3≦0.19であることを特徴とする固定型等速自在継手。 - 外側継手部材のトラック溝底面及び内側継手部材のトラック溝底面の曲線部を単一円弧としたことを特徴とする請求項1又は請求項2に記載の固定型等速自在継手。
- FとRtとの比R1(=F/Rt)を0.071以下としたことを特徴とする請求項1~請求項3のいずれか1項に記載の固定型等速自在継手。
- frとRtとの比R3(=fr/Rt)を0.15以上としたことを特徴とする請求項1~請求項4のいずれか1項に記載の固定型等速自在継手。
- 自動車のドライブシャフトの連結に用いられる請求項1~請求項5のいずれか1項に記載の固定型等速自在継手。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US12/991,480 US8545337B2 (en) | 2008-06-13 | 2009-05-28 | Fixed uniform-motion universal joint |
| CN200980122280.0A CN102066794B (zh) | 2008-06-13 | 2009-05-28 | 固定式等速万向接头 |
| EP20090762372 EP2299136B1 (en) | 2008-06-13 | 2009-05-28 | Fixed uniform-motion universal joint |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008155865A JP5507061B2 (ja) | 2008-06-13 | 2008-06-13 | 固定型等速自在継手 |
| JP2008-155865 | 2008-06-13 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2009150942A1 true WO2009150942A1 (ja) | 2009-12-17 |
Family
ID=41416653
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2009/059745 WO2009150942A1 (ja) | 2008-06-13 | 2009-05-28 | 固定型等速自在継手 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US8545337B2 (ja) |
| EP (1) | EP2299136B1 (ja) |
| JP (1) | JP5507061B2 (ja) |
| CN (1) | CN102066794B (ja) |
| WO (1) | WO2009150942A1 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011133107A (ja) * | 2009-11-26 | 2011-07-07 | Ntn Corp | 固定型等速自在継手 |
| JP5461329B2 (ja) * | 2010-07-12 | 2014-04-02 | Ntn株式会社 | 固定式等速自在継手 |
| JP2012087847A (ja) * | 2010-10-18 | 2012-05-10 | Ntn Corp | 固定型等速自在継手 |
| EP2592294A1 (en) * | 2011-11-08 | 2013-05-15 | Hyundai Wia Corporation | Angled offset ball type constant velocity joint for vehicle |
| CN103104628B (zh) * | 2011-11-09 | 2015-12-16 | 现代威亚株式会社 | 用于车辆的成角度偏移球笼式等速万向节 |
| US8852005B2 (en) | 2011-11-09 | 2014-10-07 | Hyundai Wia Corporation | Angled offset ball type constant velocity joint for vehicle |
| KR101336506B1 (ko) * | 2011-11-16 | 2013-12-03 | 현대위아 주식회사 | 차량용 볼타입 등속조인트 |
| KR101378677B1 (ko) | 2012-06-18 | 2014-03-27 | 현대위아 주식회사 | 차량의 슬라이드식 볼타입 등속조인트 |
| KR101378669B1 (ko) * | 2012-06-18 | 2014-03-26 | 현대위아 주식회사 | 자동차의 슬라이드식 볼타입 등속조인트 |
| JP5955732B2 (ja) * | 2012-10-03 | 2016-07-20 | Ntn株式会社 | 固定式等速自在継手 |
| JP7102195B2 (ja) * | 2018-04-04 | 2022-07-19 | 株式会社ジェイテクト | 等速ジョイント |
| CN113864350A (zh) * | 2020-06-12 | 2021-12-31 | 上海纳铁福传动系统有限公司 | 一种高效率大角度球笼式固定万向节 |
| US11698109B2 (en) | 2020-08-27 | 2023-07-11 | Steering Solutions Ip Holding Corporation | High angle constant velocity joint |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59106724A (ja) | 1982-11-30 | 1984-06-20 | レ−ル・ウント・ブロンカンプ・ゲゼルシヤフト・ミツト・ベシユレンクテル・ハフツング | 同期回転継手 |
| JPH04228925A (ja) | 1990-12-27 | 1992-08-18 | Toyoda Mach Works Ltd | 等速自在継手 |
| JPH08128454A (ja) | 1994-11-02 | 1996-05-21 | Toyoda Mach Works Ltd | 等速ジョイント |
| JPH09317783A (ja) | 1996-05-28 | 1997-12-09 | Ntn Corp | 自動車用固定型等速自在継手 |
| JP2001097063A (ja) * | 1999-09-30 | 2001-04-10 | Ntn Corp | Atv用ドライブアクスル |
| JP2002541395A (ja) | 1999-04-06 | 2002-12-03 | ゲーカーエヌ オートモーティヴ アーゲー | 等速ボールジョイント |
| JP2007270997A (ja) * | 2006-03-31 | 2007-10-18 | Ntn Corp | 固定式等速自在継手 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE69636726T2 (de) | 1995-12-26 | 2008-02-21 | Ntn Corp. | Gleichlaufgelenke |
| US20030017877A1 (en) | 2001-04-24 | 2003-01-23 | Masazumi Kobayashi | Constant velocity universal joint |
| JP4223358B2 (ja) | 2003-09-04 | 2009-02-12 | Ntn株式会社 | 固定式等速自在継手 |
| US7357724B2 (en) | 2004-05-24 | 2008-04-15 | Ntn Corporation | Constant velocity joint |
| EP2149719B1 (en) * | 2007-03-27 | 2013-06-19 | NTN Corporation | Fixed uniform-motion universal coupling |
-
2008
- 2008-06-13 JP JP2008155865A patent/JP5507061B2/ja active Active
-
2009
- 2009-05-28 EP EP20090762372 patent/EP2299136B1/en not_active Not-in-force
- 2009-05-28 CN CN200980122280.0A patent/CN102066794B/zh active Active
- 2009-05-28 WO PCT/JP2009/059745 patent/WO2009150942A1/ja active Application Filing
- 2009-05-28 US US12/991,480 patent/US8545337B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59106724A (ja) | 1982-11-30 | 1984-06-20 | レ−ル・ウント・ブロンカンプ・ゲゼルシヤフト・ミツト・ベシユレンクテル・ハフツング | 同期回転継手 |
| JPH04228925A (ja) | 1990-12-27 | 1992-08-18 | Toyoda Mach Works Ltd | 等速自在継手 |
| JPH08128454A (ja) | 1994-11-02 | 1996-05-21 | Toyoda Mach Works Ltd | 等速ジョイント |
| JPH09317783A (ja) | 1996-05-28 | 1997-12-09 | Ntn Corp | 自動車用固定型等速自在継手 |
| JP2002541395A (ja) | 1999-04-06 | 2002-12-03 | ゲーカーエヌ オートモーティヴ アーゲー | 等速ボールジョイント |
| JP2001097063A (ja) * | 1999-09-30 | 2001-04-10 | Ntn Corp | Atv用ドライブアクスル |
| JP2007270997A (ja) * | 2006-03-31 | 2007-10-18 | Ntn Corp | 固定式等速自在継手 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2299136A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2299136B1 (en) | 2015-05-06 |
| EP2299136A4 (en) | 2012-04-25 |
| JP5507061B2 (ja) | 2014-05-28 |
| JP2009299810A (ja) | 2009-12-24 |
| US20110065519A1 (en) | 2011-03-17 |
| CN102066794B (zh) | 2016-05-04 |
| CN102066794A (zh) | 2011-05-18 |
| US8545337B2 (en) | 2013-10-01 |
| EP2299136A1 (en) | 2011-03-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5507061B2 (ja) | 固定型等速自在継手 | |
| US7097567B2 (en) | Constant velocity universal joint | |
| CN1087817C (zh) | 等速万向联轴节 | |
| EP2101072B1 (en) | Constant velocity universal joint | |
| JP4041657B2 (ja) | 等速自在継手 | |
| EP2716926B1 (en) | Fixed constant velocity universal joint | |
| JP2007085488A (ja) | 摺動式等速自在継手 | |
| EP2908020B1 (en) | Fixed-type constant-velocity universal joint | |
| WO2011065400A1 (ja) | 固定型等速自在継手 | |
| EP3067582B1 (en) | Stationary constant velocity universal joint | |
| US8062139B2 (en) | Fixed constant-velocity universal joint | |
| JP5461329B2 (ja) | 固定式等速自在継手 | |
| JP2012087847A (ja) | 固定型等速自在継手 | |
| JP2006258207A (ja) | 固定式等速自在継手 | |
| US20220128098A1 (en) | Fixed type constant velocity universal joint | |
| EP2133582B1 (en) | Constant velocity universal joint | |
| JP2008019961A (ja) | 固定式等速自在継手 | |
| US20220056960A1 (en) | Fixed type constant velocity universal joint | |
| JP2007016899A (ja) | 固定型等速自在継手 | |
| JP5220480B2 (ja) | 固定型等速自在継手 | |
| WO2019003765A1 (ja) | 固定式等速自在継手 | |
| JP2008196634A (ja) | 固定式等速自在継手 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 200980122280.0 Country of ref document: CN |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 09762372 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 12991480 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2009762372 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 112/CHENP/2011 Country of ref document: IN |