図1は、本発明の実施の形態に係る撮像装置500の全体構成を示すブロック図である。撮像装置500は、振動検出素子60、レンズ70、位置検出素子80、駆動素子90、振動補正制御回路100、撮像素子200および画像処理部300を備える。図1では図面内のスペースの関係上、後述する制御部31を省略して描いている。
撮像素子200は、光学部品であるレンズ70を透過した光信号を電気信号に変換する。撮像素子200はCCDセンサまたはCMOSイメージセンサを採用することができる。画像処理部300は、撮像素子200により撮像された画像信号に対し、各種加工を施したり、圧縮符号化したりする。
駆動素子90はレンズ70を駆動する。たとえばボイスコイルモータを採用することができる。位置検出素子80はレンズ70の位置を検出する。たとえばホール素子を採用することができる。ホール素子は、ホール効果を利用した磁気センサであり、レンズ70のパン方向およびチルト方向の位置検出素子として機能する。振動検出素子60は撮像装置500に加わる振動を検出する。たとえばジャイロセンサを採用することができる。ジャイロセンサは、撮像装置500のヨー方向およびピッチ方向に加わる振動を角速度としてそれぞれ検出する。
振動補正制御回路100は、撮像装置500に加わる振動による光軸のずれを補正する。より具体的には、振動補正制御回路100は、位置検出素子80から出力される位置信号および後述する移動量信号に基づいて、レンズ70の位置を補正すべく駆動素子90を制御する。
振動補正制御回路100は、アナログ/デジタル変換回路20、第1イコライザ30、第2イコライザ40およびデジタル/アナログ変換回路50を有する。
アナログ/デジタル変換回路20は、振動検出素子60から出力されるアナログ形式の加速度信号をデジタル形式の加速度信号に変換して第1イコライザ30に出力する。また、位置検出素子80から出力されるアナログ形式の位置信号をデジタル形式の位置信号に変換して第2イコライザ40に出力する。アナログ/デジタル変換回路20は、両方の変換処理を時分割で実行する。
第1イコライザ30は、振動検出素子60から出力される加速度信号に応じて撮像装置500の移動量を求め、その移動量を示す移動量信号を生成する。振動検出素子60としてジャイロセンサを採用する場合、ジャイロセンサから出力される角速度信号に応じて、撮像装置500の移動角度を示す角度信号を生成する。撮像装置500の移動量は、振動検出素子60の出力信号を積分して求めることができる。第2イコライザ40は、位置検出素子80の出力信号および第1イコライザ30により生成された移動量信号に基づいて、レンズ70の位置を補正すべく駆動素子90を駆動するための制御信号を生成する。
デジタル/アナログ変換回路50は、第2イコライザ40から出力されるデジタル形式の制御信号をアナログ形式の制御信号に変換して駆動素子90に出力する。駆動素子90は、この制御信号に基づき、レンズ70の光軸と撮像素子200の中心とが一致するようレンズ70の位置を制御する。それとともに振動補正状態では、撮像装置500の移動量を補正すべくレンズ70の位置を制御する。
図2は、実施の形態1に係る振動補正制御回路100を説明するための構成図である。なお、図2ではアナログ/デジタル変換回路20およびデジタル/アナログ変換回路50は、省略して描いている。
第1ゲイン調整回路32は、振動検出素子60から出力される加速度信号の振幅を調整する。具体的には、制御部31により設定されるゲインで加速度信号を増幅する。このゲインは0~1.0の範囲で指定される。積分回路36は、第1ゲイン調整回路32から出力される加速度信号を積分し、補正すべき移動量を示す移動量信号を生成する。図2では、第1ゲイン調整回路32と積分回路36との間に、第1セレクタ34a、ハイパスフィルタ34bおよび第2セレクタ34cが挿入されているが、これらは必須ではなく、第1ゲイン調整回路32と積分回路36は直接接続されていてもよい。なお後述するように、ハイパスフィルタ34bをデジタルフィルタで構成する場合、第1セレクタ34aおよび第2セレクタ34cの機能はそのデジタルフィルタにより実現可能である。
センタリング処理回路38は、積分回路36から出力される移動量信号をゼロ方向にセンタリングする。センタリング処理回路38は、ハイパスフィルタで構成することができる。第2ゲイン調整回路39は、センタリング処理回路38によりセンタリングされた移動量信号の振幅を調整する。具体的には、制御部31により設定されるゲインで加速度信号を増幅する。このゲインは通常、1.0に設定される。このゲインが1.0未満に設定される場合については後述する実施の形態4で説明する。
制御部31は、積分回路36から出力される移動量信号の振幅値を参照して、第1ゲイン調整回路32のゲインを制御する。制御部31は、積分回路36から出力される移動量信号の振幅値を参照対象としてもよいし、センタリング処理回路38から出力される移動量信号の振幅値を参照対象としてもよいし、第2ゲイン調整回路39から出力される移動量信号の振幅値を参照対象としてもよい。すなわち、図2におけるN2地点、N3地点およびN4地点のいずれを参照対象としてもよい。
制御部31は、撮像装置500におけるパンニング状態またはチルティング状態の開始を検出するための外側閾値と、当該外側閾値よりゼロに近い値に設定された内側閾値との間に、当該移動量信号の振幅値が存在するとき、第1ゲイン調整回路32のゲインをつぎのように設定する。すなわち、当該移動量信号の振幅値が当該外側閾値よりゼロから離れて存在するときに設定されるゲインG1(G1は固定値)と、その振幅値が当該内側閾値よりゼロの近くに存在するときに設定されるゲインG3(G1<G3は固定値)との間の範囲に位置するゲインG2(G1<G2<G3)を設定する。上記内側閾値は、同じ絶対値を持つ値が正側および負側にそれぞれ設定される。上記外側閾値も同様に、当該内側閾
値の外側に、同じ絶対値を持つ値が正側および負側にそれぞれ設定される。
たとえば、制御部31は、上記移動量信号の振幅値が当該外側閾値よりゼロから離れて存在するとき第1ゲイン調整回路32のゲインを実質的に0に設定し、その振幅値が当該内側閾値よりゼロの近くに存在するとき第1ゲイン調整回路32のゲインを実質的に1.0に設定し、その振幅値が当該外側閾値と当該内側閾値との間に存在するとき第1ゲイン調整回路32のゲインG2を0<G2<1.0の範囲内の値に設定する。たとえば、0.5に設定する。0に近い値に設定されるほど、パンニング状態またはチルティング状態に遷移されにくくなり、1.0に近い値に設定されるほど、パンニング状態またはチルティング状態に遷移されやすくなる。
制御部31は、当該移動量信号の振幅値が当該外側閾値よりゼロから離れて存在するときパンニング状態またはチルティング状態と判定する。この状態では、振動補正処理を無効にするため第1ゲイン調整回路32のゲインを実質的に0に設定し、振動検出素子60から出力される加速度信号が積分回路36に入力されないよう制御する。
制御部31は、当該移動量信号の振幅値が当該内側閾値よりゼロの近くに存在するとき通常の振動補正状態と判定する。この状態では、振動補正処理を完全に有効にするため第1ゲイン調整回路32のゲインを実質的に1.0に設定し、振動検出素子60から出力される加速度信号が積分回路36にそのまま入力されるよう制御する。
制御部31は、当該移動量信号の振幅値が当該外側閾値と当該内側閾値との間に存在するとき、振動補正処理の感度を弱く設定する弱振動補正状態に制御すべき状態と判定する。当該移動量信号の振幅値が当該外側閾値に近づいてくると、パン動作またはチルト動作によるものではない、手振れによる低周波の振動が加わっただけでも当該外側閾値を超えてしまう。そこで、弱振動補正状態に遷移させ、加速度信号の振幅値を減衰させることにより積分回路36で積算される積算値、すなわち移動量信号の振幅値の上昇を抑制する。
制御部31は、上記移動量信号の振幅値が上記外側閾値と上記内側閾値との間に存在するとき、上記加速度信号の振幅値を参照し、所定の設定値と比較する。上記加速度信号の振幅値が所定の設定値よりゼロの近くに存在する場合、上記移動量信号の振幅値が上記内側閾値よりゼロの近くに存在するときのゲインG3を第1ゲイン調整回路32に設定してもよい。上記設定値は、同じ絶対値を持つ値が正側および負側にそれぞれ設定される。
すなわち、弱振動補正状態に制御すべき状態でも、振動検出素子60から出力される加速度信号の振幅値(N1地点)が所定の設定値よりゼロの近くに存在する場合、通常の振動補正状態を維持するよう制御する。上記加速度信号が弱い状態で弱振動補正状態に遷移させると、振動補正処理の感度低下によりファインダ内の画像が不自然に動き、その動きがユーザに気付かれてしまうためである。
上記外側閾値、上記内側閾値、弱振動補正状態における第1ゲイン調整回路32のゲイン、および上記設定値は、実験結果やシミュレーション結果にもとづき、設計者が意図する、振動補正処理の感度を実現するための値に設定される。
第1セレクタ34a、ハイパスフィルタ34bおよび第2セレクタ34cを設ける場合、ハイパスフィルタ34bは、第1ゲイン調整回路32から出力される加速度信号をフィルタリングし、積分回路36に出力する。後述するようにハイパスフィルタ34bは加速度信号をゼロ方向にセンタリングする作用を持つ。
制御部31は、上記移動量信号の振幅値が上記内側閾値よりゼロの近くに存在するとき
ハイパスフィルタ34bの能力を無効にし、当該振幅値が上記外側閾値と上記内側閾値との間に存在するときハイパスフィルタ34bの能力を有効にしてもよい。また、制御部31は、上記移動量信号の振幅値が上記内側閾値よりゼロの近くに存在するとき、ハイパスフィルタ34bの能力を弱め、当該振幅値が上記外側閾値と上記内側閾値との間に存在するときハイパスフィルタ34bの能力を強めてもよい。たとえば、通常の振動補正状態のとき、第1セレクタ34aおよび第2セレクタ34cを制御してハイパスフィルタ34bをバイパスするルートを選択する。弱振動補正状態に制御すべき状態のとき、第1セレクタ34aおよび第2セレクタ34cを制御してハイパスフィルタ34bを通るルートを選択する。弱振動補正状態に制御すべき状態のとき、ハイパスフィルタ34bの能力を有効にして、加速度信号をセンタリングすることにより、積分回路36で積算される積算値、すなわち移動量信号の振幅値の上昇を抑制する。なお、パンニング状態またはチルティング状態のとき、第1ゲイン調整回路32により加速度信号が無効に制御されるため、ハイパスフィルタ34bの能力の有効または無効は全体の制御に関係なく、どちらでもよい。
制御部31は、弱振動補正状態に制御すべき状態でも、振動検出素子60から出力される加速度信号の振幅値(N1地点)が所定の設定値よりゼロの近くに存在する場合、ハイパスフィルタ34bの能力を無効にしてもよい。
加算回路42は、位置検出素子80から出力される位置信号と第1イコライザ30から出力される移動量信号とを加算する。サーボ回路44は、加算回路42の出力信号に応じて、駆動素子90を駆動するための制御信号を生成する。
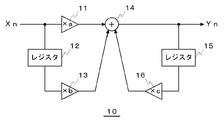
図3は、ハイパスフィルタ34b、積分回路36およびセンタリング処理回路38を構成することが可能なデジタルフィルタ10の一例を示す回路図である。すなわち、積分回路36はローパスフィルタ、センタリング処理回路38はハイパスフィルタで構成することができる。
デジタルフィルタ10は、第1乗算器11、第1レジスタ12、第2乗算器13、加算器14、第2レジスタ15および第3乗算器16を有する。第1乗算器11は、入力値Xnを係数aで乗算する。第1レジスタ12は入力値Xnを一時保持する。第2乗算器13は、第1レジスタ12に保持される一サンプリング周期前の入力値X(n-1)を係数bで乗算する。加算器14は、第1乗算器11の出力値、第2乗算器13の出力値、および第3乗算器16の出力値を加算する。第2レジスタ15は、加算器14の出力値を一時保持する。第3乗算器16は、第2レジスタ15に保持される一サンプリング周期前の出力値Y(n-1)を係数cで乗算する。
すなわち、このデジタルフィルタ10は、下記式1に示す演算を行う。
Yn=Xn・a+X(n-1)・b+Y(n-1)・c ・・・(式1)
Xn(n=1、2、3・・・)は入力値、Ynは出力値、aは第1乗算器11の係数、bは第2乗算器13の係数、およびcは第3乗算器16の係数を示す。
デジタルフィルタ10でローパスフィルタを構成する場合、第1乗算器11の係数a、第2乗算器13の係数b、および第3乗算器16の係数cを下記式2の関係を満たすように設定する。
(0<)a≒b≪c ・・・(式2)
この場合、第2レジスタ15および第3乗算器16の系の作用が大きくなり、累積加算の機能が主となる。よって、デジタルフィルタ10は積分機能を備え、第2レジスタ15には積分値が格納される。ここで、係数aと係数bとを略同じ値に設定しているのは、一サンプリング周期前の入力値の遅延成分を加算することによって、ランダムノイズを低減
させるためである。なお、係数aおよび係数bを係数cより小さく設定するほど、積分値の上昇を抑制することができる。このデジタルフィルタ10で積分回路36を構成する場合、係数aおよび係数bと、係数cとの比率は、設計者が意図する、振動補正処理の感度を実現するための値に設定される。
デジタルフィルタ10でハイパスフィルタを構成する場合、第1乗算器11の係数a、第2乗算器13の係数b、および第3乗算器16の係数cを下記式3、4の関係を満たすように設定する。
a≒-b ・・・(式3)
c>0 ・・・(式4)
この場合、第1乗算器11の出力と第2乗算器13の出力を加算器14で加算した値は、一サンプリング期間における入力値の変動分を示す。その変動分を第2レジスタ15および第3乗算器16の系を用いて、累積加算することによって、高周波成分のみを出力するフィルタとなる。
すなわち、入力値の周波数が低い場合、当該変動分が小さくなり、当該変動分を一サンプリング周期前の出力値に加算しても、出力値の変動は小さくなる。結果として、低周波成分は通過していないようにみえる。一方、入力値の周波数が高い場合、当該変動分が大きくなり、当該変動分を一サンプリング周期前の出力値に加算すると、出力値の変動は大きくなる。結果として、高周波成分は通過しているようにみえる。このデジタルフィルタ10で、ハイパスフィルタ34bおよびセンタリング処理回路38を構成することができる。
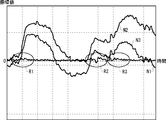
図4は、振動検出素子60から出力される加速度信号、積分回路36から出力される移動量信号、およびセンタリング処理回路38から出力される移動量信号の一例を示す図である。図2に沿って説明すると、振動検出素子60から出力される加速度信号はN1地点の信号であり、積分回路36から出力される移動量信号がN2地点の信号であり、およびセンタリング処理回路38から出力される移動量信号がN3地点の信号である。
振動検出素子60から出力される加速度信号(N1地点)が領域R1、R2、R3(図4内で丸で囲まれている領域)で正側に膨らんでいる。これに応答して、積分回路36から出力される移動量信号(N2地点)が上昇していることが分かる。センタリング処理回路38は、積分回路36により積分された移動量信号の低周波数成分、つまり直流成分を除去するので、センタリング処理回路38から出力される移動量信号(N3地点)は、その移動量信号(N2地点)からオフセット成分を除去した信号となる。
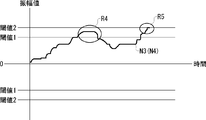
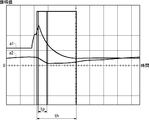
図5は、実施の形態1に係る、センタリング処理回路38から出力される移動量信号の一例を示す図である。制御部31は、パンニング状態またはチルティング状態に遷移させるか否かを判定するために、センタリング処理回路38から出力される移動量信号(N3地点)を監視する。もちろん、第2ゲイン調整回路39のゲインが1.0に設定されるため、センタリング処理回路38から出力される移動量信号(N3地点)の代わりに第2ゲイン調整回路39から出力される移動量信号(N4地点)を監視してもよい。
図5における閾値1が上記内側閾値に対応し、閾値2が上記外側閾値に対応する。閾値1と閾値2との間の領域が上記弱振動補正状態に制御すべき領域である。図5における領域R4は通常の振動補正状態から上記弱振動補正状態に遷移したため、当該移動量信号の振幅値の上昇が抑制され、パンニング状態またはチルティング状態に突入しなかったことを示す。領域R5は当該移動量信号の振幅値が閾値2を超え、パンニング状態またはチルティング状態に突入したことを示す。
図6は、実施の形態1に係るパンニング状態またはチルティング状態への突入を判定するための処理を示すフローチャートである。手振れ補正処理が有効に機能している状態で、制御部31は積分回路36、センタリング処理回路38および第2ゲイン調整回路39から出力される移動量信号のいずれかを監視する(S11)。制御部31は、その移動量信号の振幅値の絶対値が内側閾値の絶対値を超えたか否か判定する(S12)。超えない場合(S12のN)、通常の手振れ補正状態と判定し、第1ゲイン調整回路32のゲインを1.0に設定し(S13)、かつハイパスフィルタ34bの能力を無効にする(S14)。
ステップS12にて、上記移動量信号の振幅値の絶対値が内側閾値の絶対値を超えた場合(S12のY)、制御部31は当該移動量信号の振幅値の絶対値が外側閾値の絶対値を超えたか否かを判定する(S15)。超えない場合(S15のN)、制御部31は振動検出素子60から出力される加速度信号を監視する(S16)。
制御部31は、その加速度信号の振幅値の絶対値が、所定の設定値の絶対値を超えたか否か判定する(S17)。超えない場合(S17のN)、ステップS13に遷移し、通常の手振れ補正状態と判定した場合と同様の処理を行う。超えた場合(S17のY)、制御部31は弱手振れ補正状態に制御すべき状態と判定し、第1ゲイン調整回路32のゲインを0.5に設定し(S18)、かつハイパスフィルタ34bの能力を有効にする(S19)。
ステップS15にて、当該移動量信号の振幅値の絶対値が外側閾値の絶対値を超えた場合(S15のY)、制御部31は、パンニング状態またはチルティング状態と判定し、第1ゲイン調整回路32のゲインを0に設定し(S20)、かつハイパスフィルタ34bの能力を無効にする(S21)。
以上説明したように実施の形態1によれば、上記移動量信号の振幅値がパンニング状態またはチルティング状態への突入を判定するための閾値に近づいてくると、上記加速度信号の振幅値を減衰させることにより、上記移動量信号の振幅値の上昇を抑制することができる。よって、低周波数帯域に対しても感度を持ちつつ、パン動作中またはチルト動作中と誤判定されることにより、振動を補正すべき状態にも関わらず振動補正が停止する事態を抑制することができる。また、加速度信号を減衰するとともに、その加速度信号をハイパスフィルタに入力させると、上記移動量信号の振幅値の上昇をさらに抑制することができる。
上記移動量信号の振幅値がパンニング状態またはチルティング状態への突入を判定するための閾値に近づいてきても、上記加速度信号の振幅値が小さい場合、上述した加速度信号の減衰処理を発動しないようにすることもできる。この場合、当該減衰処理によりファインダ内の画像が不自然に動き、その動きがユーザに気付かれてしまう事態を抑制することができる。
図7は、実施の形態2に係る振動補正制御回路100を説明するための構成図である。実施の形態2に係る振動補正制御回路100の構成は、実施の形態1に係る振動補正制御回路100の構成と同じである。実施の形態1では第1ゲイン調整回路32およびハイパスフィルタ34bの制御について注目したが、実施の形態2では積分回路36およびセンタリング処理回路38の制御について説明する。
なお、第1ゲイン調整回路32およびハイパスフィルタ34bの制御は、実施の形態1に係る制御に限定されるものではない。たとえば、上記内側閾値を設けず、上記弱振動補
正状態を想定しない構成も可能である。その場合、制御部31は上記外側閾値を超えたらパンニング状態またはチルティング状態、超えなければ、通常の振動補正状態と判定する。前者の場合、第1ゲイン調整回路32のゲインを実質的に0に設定し、後者の場合、実質的に1.0に設定する。
制御部31は、撮像装置500がパンニング状態またはチルティング状態であるか否かを判定する。実施の形態1で説明したように、制御部31は、積分回路36から出力される移動量信号の振幅値(N2地点)、センタリング処理回路38から出力される移動量信号の振幅値(N3地点)または第2ゲイン調整回路39から出力される移動量信号の振幅値(N4地点)を参照して、パンニング状態またはチルティング状態に突入したか否か判定することができる。また、後述する実施の形態3で説明するように振動検出素子60から出力される加速度信号の振幅値(N1地点)の平均値を参照して、パンニング状態またはチルティング状態に突入したか否かを判定してもよい。
積分回路36は、デジタルフィルタで構成され、当該デジタルフィルタは、移動量信号の振幅値とすべき積算値を保持するレジスタを含む。このデジタルフィルタを図3に示したデジタルフィルタ10で構成する場合、当該積算値は第2レジスタ15に保持される。
制御部31は、パンニング状態またはチルティング状態であると判定した場合、上記レジスタに保持されている積算値の絶対値を減少させる。その際、当該積算値の絶対値を漸次的に減少させることが望ましい。パンニング状態またはチルティング状態のとき、制御部31により第1ゲイン調整回路32のゲインは実質的に0に設定されるため、積分回路36への加速度信号の入力は無効となる。
センタリング処理回路38は、デジタルハイパスフィルタで構成されてもよい。制御部31は、パンニング状態またはチルティング状態であると判定した場合、当該デジタルハイパスフィルタの遮断周波数が高くなるよう、そのデジタルハイパスフィルタの係数を変更してもよい。たとえば、制御部31はパンニング状態またはチルティング状態のとき、当該デジタルハイパスフィルタの遮断周波数を0.3Hzにそれ以外の状態のとき0.1Hzに設定する。
当該デジタルハイパスフィルタを図3に示したデジタルフィルタ10で構成する場合、制御部31はデジタルフィルタ10の遮断周波数を高くするとき、係数aおよび係数cの値を減少させ、係数bの値を上昇させる。加算器14で加算される一サンプリング周期前の出力値Y(n-1)が減少するため、出力値Yの減少を早めることができる。よって、デジタルフィルタ10の係数a、係数bおよび係数cを変更することにより、センタリング処理回路38のセンタリング能力を強めることができる。逆に、上記遮断周波数を低くするとき、係数aおよび係数cの値を上昇させ、係数bの値を減少させる。
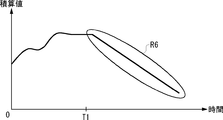
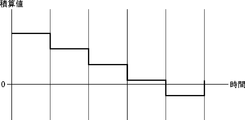
図8は、積分回路36を図3に示したデジタルフィルタ10で構成した場合における、第2レジスタ15に保持される積算値の遷移を示す図である。図8にて時刻T1までが振動補正状態であり、時刻T1以降がパンニング状態またはチルティング状態である。制御部31はパンニング状態またはチルティング状態に遷移すると、領域R6に示すように第2レジスタ15に保持される積算値を段階的に減少させる。図8では単位時間ごとに第2レジスタ15に保持される積算値から所定の固定値を減算して、第2レジスタ15に再設定している。なお、減算する値は固定値に限らず、パンニング状態またはチルティング状態に遷移した初期段階では上記積算値から減算する値を小さな値とし、時間経過にしたがい減算する値を徐々に大きな値に変更していってもよい。
以上説明したように実施の形態2によれば、パンニング状態またはチルティング状態中
に、デジタルフィルタで構成された積分回路内のレジスタに保持される、補正すべき移動量信号とすべき積算値を減少させることによりつぎの効果を奏する。すなわち、パンニング状態またはチルティング状態が終了したとき、レンズの位置が中心位置に一致またはできるだけ中心位置に近い状態で振動補正機能を再開させることができる。よって、パン方向およびチルト方向のそれぞれについて、レンズの可動範囲を十分に確保することができる。また、レジスタ内の積算値を減算することにより、レンズの移動態様を柔軟に設定することができる。
また、レジスタ内の積算値を漸次的に減算することにより、ファインダ内の画像が不自然に動き、その動きがユーザに気付かれてしまうことを抑制することができる。また、パンニング状態またはチルティング状態中に、積分回路から出力される移動量信号の振幅値をセンタリングするためのハイパスフィルタの遮断周波数を大きくすることにより、振動補正状態のときより、そのハイパスフィルタのセンタリング能力を高めることができる。また、そのセンタリングによる、ファインダ内の画像の動きはユーザに気付かれにくいものである。
図9は、実施の形態3の実施例1に係る振動補正制御回路100を説明するための構成図である。実施の形態3の実施例1に係る振動補正制御回路100の構成は、実施の形態1に係る振動補正制御回路100の構成と同じである。実施の形態1では、弱振動補正状態の設置、およびパンニング状態またはチルティング状態の開始判定について説明したが、実施の形態3の実施例1ではパンニング状態またはチルティング状態の終了判定について説明する。
制御部31は、撮像装置500におけるパンニング状態またはチルティング状態の終了を以下の手法により判定する。すなわち、制御部31は、パンニング状態またはチルティング状態において、振動検出素子60から出力される加速度信号の振幅値を所定の単位期間に複数サンプリングし、それらサンプリング値の平均値が、所定の基本閾値よりゼロの近くに存在する場合、パンニング状態またはチルティング状態の終了と判定する。パンニング状態またはチルティング状態の終了と判定すると、実施の形態1で説明したように制御部31は第1ゲイン調整回路32のゲインを実質的に1.0に設定する。
実施の形態3の実施例1にて、パンニング状態またはチルティング状態の開始判定手法はとくに限定されない。たとえば、実施の形態1で説明した手法を用いることができる。また、制御部31は振動検出素子60から出力される加速度信号の振幅値を所定の単位期間に複数サンプリングし、それらサンプリング値の平均値が、所定の基本閾値よりゼロから離れて存在する場合、パンニング状態またはチルティング状態の開始と判定してもよい。
制御部31は、パンニング状態またはチルティング状態においてサンプリングした加速度信号の振幅値が、上記基本閾値よりゼロから離れた値に設定された外側閾値よりゼロから離れて存在するとき、その振幅値が上記外側閾値よりゼロの近くに存在するようになるまで、パンニング状態またはチルティング状態の終了判定を停止してもよい。当該外側閾値を設定すれば、ゼロから大きく外れている、ノイズなどによる加速度信号の異常値を検出することができる。上記平均値を算出するためのサンプリング値にこのような異常値が含まれると、当該平均値が歪められ、誤判定の原因となる。
積分回路36は、デジタルフィルタで構成されてもよく、当該デジタルフィルタは、上記移動量信号の振幅値とすべき積算値を保持するレジスタを含んでもよい。このデジタルフィルタを図3に示したデジタルフィルタ10で構成する場合、当該積算値は第2レジスタ15に保持される。制御部31は、パンニング状態またはチルティング状態において当
該レジスタに保持されている積算値の絶対値を漸次的に減少させてもよい。
この場合において、制御部31は、上記平均値が上記基本閾値よりゼロの近くに存在し、かつ当該レジスタに保持される積算値が所定の設定値以下のとき、パンニング状態またはチルティング状態の終了と判定し、それ以外のときパンニング状態またはチルティング状態の終了と判定しない。すなわち、上記平均値が上記基本閾値よりゼロの近くに存在する場合でも、当該レジスタに保持される積算値が上記設定値を超えるときは、パンニング状態またはチルティング状態の終了と判定しない。すなわち、レンズの位置が中心位置から大きく離れている場合、レンズの位置が中心位置に近づくまで振動補正処理の再開を保留する。実施の形態2で説明した趣旨による。
上記基本閾値は、同じ絶対値を持つ値が正側および負側にそれぞれ設定される。上記外側閾値も同様に、当該基本閾値の外側に、同じ絶対値を持つ値が正側および負側にそれぞれ設定される。上記設定値も、同じ絶対値を持つ値が正側および負側にそれぞれ設定される。上記基本閾値、上記外側閾値、上記単位期間、その単位期間におけるサンプリング数、上記設定値は、実験結果やシミュレーション結果にもとづき、設計者が意図する、振動補正処理の感度を実現するための値に設定される。
図10は、実施の形態3の実施例1に係る、振動検出素子60から出力される加速度信号の別の例を示す図である。図11は、図10に示す加速度信号を基礎とした、各単位期間における平均値の算出過程および算出結果を示す図である。図10の横軸には各単位期間の先頭に数字(1~18)を振っており、図11の項目「期間先頭」に対応する。
制御部31は、パンニング状態またはチルティング状態を終了させるか否かを判定するために、振動検出素子60から出力される加速度信号(N1地点)を監視する。制御部31は、当該加速度信号の振幅値を所定の単位期間ごとに複数サンプリングし、各単位期間におけるサンプリング値の平均値が、閾値3よりゼロの近くに存在するか否か判定する。
制御部31は、上記平均値を算出するための除数をn(nは正の偶数)とした場合、前回の単位期間における平均値の半分と、今回の単位期間におけるn/2個のサンプリング値の合計とを加算した値をnで除算することにより、今回の単位期間における平均値を算出してもよい。
図10、11の例では各単位期間におけるサンプリング数を8に設定している。また、上記閾値3を5、上記閾値4を10に設定している。制御部31は、単位期間1(以下、期間先頭1から期間先頭2までの期間を単位期間1と表記する。単位期間2以降も同様。)内に、上記加速度信号の振幅値を8個サンプリングし、その合計値を8で除算する。これにより、単位期間1の平均値を算出する。図11の例では6.7625である。この平均値の絶対値は上記閾値3の絶対値を超えるため、制御部31はパンニング状態またはチルティング状態と判定する。
制御部31は、単位期間2内に、上記加速度信号の振幅値を4個サンプリングし、その合計値と(単位期間1の平均値/2)との合計値を8で除算する。これにより、単位期間2の平均値を算出する。図11の例では7.34375である。このように、単位期間2以降の平均値の算出では(前回の単位期間における平均値/2)を受け継ぐことにより、サンプリング数を減少させることができる。
図11の例では、単位期間6の平均値が上記閾値3を下抜けするため、制御部31は期間先頭7でパンニング状態またはチルティング状態を終了する。そして、たとえば、期間先頭11で再度、パンニング状態またはチルティング状態が開始する。制御部31は当該
加速度信号ではなく、上記移動量信号を監視してその開始を判定してもよい。また、当該平均値を算出し続け、その平均値の絶対値が上記閾値3の絶対値を超えたときその開始と判定してもよい。
図11の例では、単位期間12内における3個目のサンプリング値が上記閾値4を上抜けている。制御部31はサンプリングした加速度信号の振幅値の絶対値が上記閾値4の絶対値を超えている期間、上記平均値の算出処理を停止する。それに伴い、(前回の単位期間における平均値/2)もリセットする。
制御部31はサンプリングした加速度信号の振幅値が上記閾値4を下抜けすると、上記平均値の算出を再開する。単位期間13から平均値の算出を再開している。(前回の単位期間における平均値/2)を受け継がないため、制御部31は単位期間13内に上記加速度信号の振幅値を8個サンプリングし、その合計値を8で除算する。
以上説明したように実施の形態3の実施例1によれば、上記加速度信号の振幅値の平均値を、パンニング状態またはチルティング状態の終了判定の基礎とすることにより、その終了判定を精度よく行うことができる。また、判定用の基本閾値よりゼロから離れた位置に外側閾値を設定することにより、上記加速度信号の異常値を検出することができる。当該異常値が検出された単位期間では上記終了判定を停止することにより、当該異常値により上記平均値が歪められることを抑制することができる。よって、当該終了判定の精度をさらに向上させることができる。
また、積分回路内のレジスタに保持される積算値を、上記終了判定の一条件に加えることにより、レンズの位置が適切な範囲内に存在する状態で振動補正処理を再開することができる。また、各単位期間において上記平均値を算出する際、前回の単位期間における平均値の一部を受け継ぐことにより、今回の単位期間におけるサンプリング数および演算量を低減することができる。前回の単位期間における平均値の一部を受け継ぐと、当該平均値の変動を抑制する効果を持つため、パンニング状態またはチルティング状態の終了をより抑制的に判定する効果を持つ。
図12は、実施の形態3の実施例2に係る振動補正制御回路100を説明するための構成図である。実施の形態3の実施例2に係る振動補正制御回路100の構成は、実施の形態1に係る振動補正制御回路100の構成と同じである。実施の形態1では、弱振動補正状態の設置、およびパンニング状態またはチルティング状態の開始判定について説明したが、実施の形態3の実施例2では当該弱振動補正状態の終了判定について説明する。
制御部31は、振動の補正処理を無効にしているパンニング状態またはチルティング状態と、その補正処理を有効にしている振動補正状態との間の状態であり、当該振動補正状態のときより補正処理の感度が弱く設定されている弱振動補正状態の終了をつぎの手法により判定する。
制御部31は、当該弱振動補正状態において、上記移動量信号の振幅値を所定の単位期間に複数サンプリングし、それらサンプリング値の平均値が、所定の閾値6よりゼロの近くに存在する場合、弱振動補正状態の終了と判定する。制御部31は、積分回路36から出力される移動量信号の振幅値を参照対象としてもよいし、センタリング処理回路38から出力される移動量信号の振幅値を参照対象としてもよいし、第2ゲイン調整回路39から出力される移動量信号の振幅値を参照対象としてもよい。すなわち、図12におけるN2地点、N3地点およびN4地点のいずれを参照対象としてもよい。上記閾値6は同じ絶対値を持つ値が正側および負側にそれぞれ設定される。上記閾値6は、実験結果やシミュレーション結果にもとづき、設計者が意図する、振動補正処理の感度を実現するための値
に設定される。
実施の形態3の実施例2でも実施の形態3の実施例1で説明した平均値の算出方法((前回の単位期間における平均値/2)を受け継ぐ方法)を用いることができる。ただし、上記移動量信号の振幅値は積算値であり、一般的に上記移動量信号の振幅値の変化は上記加速度信号の振幅値の変化より小さいことから、上記外側閾値を設ける必要性は、上記加速度信号の振幅値の平均値を算出する場合より小さい。
以上説明したように実施の形態3の実施例2によれば、上記移動量信号の振幅値の平均値を、上記弱振動補正状態の終了判定の基礎とすることにより、その終了判定を精度よく行うことができる。
図13は、実施の形態4に係る振動補正制御回路100を説明するための構成図である。実施の形態4に係る振動補正制御回路100の構成は、実施の形態1に係る振動補正制御回路100の構成と同じである。実施の形態4では第1ゲイン調整回路32、センタリング処理回路38および第2ゲイン調整回路39の制御について説明する。
第2ゲイン調整回路39は、センタリング処理回路38から出力される移動量信号の振幅を調整する。制御部31は、撮像装置500におけるパンニング状態またはチルティング状態の終了を検出する。その終了判定は、とくに限定されないが、実施の形態3で説明した手法を用いてもよい。なお、パンニング状態またはチルティング状態の開始判定も、とくに限定されないが、実施の形態1で説明した手法を用いてもよい。
制御部31は、パンニング状態またはチルティング状態においてその終了を検出したとき、低下させていた第1ゲイン調整回路32のゲインを元のゲインに戻しつつ、第2ゲイン調整回路39のゲインを所定の値まで低下させ、その後、漸次的に元のゲインまで上昇させる。実施の形態1で説明したように、第1ゲイン調整回路32のゲインは、パンニング状態またはチルティング状態では実質的に0に設定される。それ以外の状態では、上記弱振動補正状態を考慮しなければ、実質的に1.0に設定される。この場合、低下させていた第1ゲイン調整回路32のゲインは実質的に0であり、第1ゲイン調整回路32の元のゲインは実質的に1.0である。
第2ゲイン調整回路39のゲインは、振動補正状態中も、パンニング状態中またはチルティング状態中も実質的に1.0に設定されることが一般的である。この場合、第2ゲイン調整回路39の元のゲインとは実質的に1.0である。第2ゲイン調整回路39における、上記所定の値および元のゲインに戻すスピードは、実験結果やシミュレーション結果にもとづき、設計者により任意に設定される。たとえば、上記所定の値を0.5に設定してもよい。
センタリング処理回路38は、デジタルハイパスフィルタで構成され、積分回路36から出力される移動量信号をゼロ方向にセンタリングし、第2ゲイン調整回路39に出力する。制御部31は、パンニング状態またはチルティング状態においてその終了を検出したとき、高くしていた上記デジタルハイパスフィルタの遮断周波数が元の周波数に戻るよう、当該デジタルハイパスフィルタの係数を変更してもよい。
たとえば、制御部31はパンニング状態またはチルティング状態のとき当該デジタルハイパスフィルタの遮断周波数を0.3Hzに、それ以外(振動補正状態など)のとき0.1Hzに設定する。この場合、上記デジタルハイパスフィルタの遮断周波数が元の周波数に戻るとは、0.1Hzに戻ることを意味する。当該デジタルハイパスフィルタを図3に示したデジタルフィルタ10で構成する場合、制御部31はデジタルフィルタ10の遮断
周波数を高くするとき、係数aおよび係数cの値を減少させ、係数bの値を上昇させる。その遮断周波数を低くするとき、係数aおよび係数cの値を上昇させ、係数bの値を減少させる。
制御部31は、パンニング状態またはチルティング状態においてその終了を検出したとき、第2ゲイン調整回路39のゲインを所定の値まで低下させ、その後、漸次的に元のゲインまで上昇させ、元のゲインに戻ったと実質的に同時に、上記デジタルハイパスフィルタの係数を変更することが好ましい。第2ゲイン調整回路39のゲインが元のゲインに戻る前に、上記デジタルハイパスフィルタの係数を変更すると、当該ゲインの変化による上記移動量信号の変動と当該係数の変更による上記移動量信号の変動が重複してしまう。逆に、第2ゲイン調整回路39のゲインが元のゲインに戻った後、所定期間経過後に、上記デジタルハイパスフィルタの係数を変更すると、その所定期間の間、センタリング処理回路38によるセンタリング作用が効き過ぎる状態となってしまう。
もちろん、第2ゲイン調整回路39のゲインが元のゲインに戻るタイミングと、上記デジタルハイパスフィルタの係数を変更するタイミングとの時間差が小さければ、このような影響は少なくなり、それらのタイミングが同時の場合と類似した効果が得られる。
図14は、パン方向の移動量信号a1およびチルト方向の移動量信号a2の一例を示す。図14にて、期間tpはパンニング状態またはチルティング状態と判定されている期間を示す。期間thはセンタリング処理回路38を構成するハイパスフィルタの遮断周波数が通常より大きく設定される期間を示す。
制御部31は、上記閾値2の設定位置を調整することにより、パンニング状態またはチルティング状態に完全に遷移する前に、パンニング状態またはチルティング状態への遷移を検知することができる。制御部31は、パン方向の加速度信号が入力される系統とチルト方向の加速度信号が入力される系統の両方の系統において、第1ゲイン調整回路32のゲインを実質的に0に設定し、センタリング処理回路38を構成するハイパスフィルタの遮断周波数を0.1Hzから0.3Hzに変更する。すなわち、パンニング状態またはチルティング状態において加えられる振動を無効としつつ、レンズのセンター戻し作用を強める。
制御部31は、パンニング状態またはチルティング状態においてその終了を判定すると、第2ゲイン調整回路39のゲインを実質的に0.5に下げ、その後、徐々に実質的に1.0に戻す。第2ゲイン調整回路39のゲインが実質的に1.0に戻った時点でセンタリング処理回路38を構成するハイパスフィルタの遮断周波数を0.1Hzに戻す。
パン方向の移動量信号a1およびチルト方向の移動量信号a2とも、期間tpの間にセンター方向にきれいに移動していることが分かる。また、期間tpの終了後も期間thの終了後もパン方向の移動量信号a1およびチルト方向の移動量信号a2に歪みが生じていないことが分かる。
以上説明したように実施の形態4によれば、パンニング状態またはチルティング状態が終了し、振動補正機能が再開されるときに、第2ゲイン調整回路39のゲインを一時的に下げることにより、第1ゲイン調整回路32のゲイン変更による影響を緩和することができる。すなわち、第1ゲイン調整回路32のゲインが戻ることにより、上記加速度信号が上記移動量信号に影響を与え始めるが、この影響を与え始める期間における上記移動量信号の変動を抑制することができる。
また、センタリング処理回路38を構成するハイパスフィルタの遮断周波数を第2ゲイ
ン調整回路39のゲインが元に戻ると実質的に同時に変更することにより、第1ゲイン調整回路32のゲイン変更による影響と、当該ハイパスフィルタの遮断周波数の変更による影響を適切に分散させることができる。以上により、振動補正機能の再開による発生し得る不自然な画像の動きを抑制することができる。
図15は、実施の形態5に係る振動補正制御回路100を説明するための構成図である。実施の形態5に係る振動補正制御回路100の構成は、実施の形態1に係る振動補正制御回路100の構成と同じである。実施の形態5では積分回路36の制御について注目する。
実施の形態5では、積分回路36は、デジタルフィルタで構成され、当該デジタルフィルタは、上記移動量信号の振幅値とすべき積算値を保持するレジスタを含む。このデジタルフィルタを図3に示したデジタルフィルタ10で構成する場合、当該積算値は第2レジスタ15に保持される。
まず、実施の形態5の実施例1について説明する。この実施例1に係る補正処理は、補正すべき移動量とする、加速度信号の積算値が小さい段階において実行されることが好適である。たとえば、振動補正機能が発動してから所定の期間、実行することができる。シャッターボタンの半押しで振動補正機能が発動する場合、その半押しから所定の期間、実行される。また、主電源の投入で振動補正機能が発動する場合、その主電源の投入から所定の期間、実行される。また、上述したパンニング状態またはチルティング状態から振動補正状態に遷移してから所定の期間、実行されてもよい。いずれの期間も上記積算値が大きく変動しやすい期間である。
制御部31は、上記レジスタに保持されている積算値を所定の時間間隔で取得し、前回取得した積算値と今回取得した積算値との変化値を求め、その変化値が所定の閾値を超えるとき、今回取得した積算値から、その値をゼロに近づけるための補正値を減算して当該レジスタに再設定する。上記変化値は正の場合と負の場合があるため、上記閾値として同じ絶対値を持つ値が正側と負側に一組設けられる。より厳密には、上記変化値が上記閾値を超えるとは、絶対値の増加方向に超えることを意味する。一組の閾値は段階的に複数設けられてもよく、以下、複数設ける場合の例について説明する。
まず、段階的に設定される複数の閾値と、当該複数の閾値に比例して段階的に設定される複数の補正値とをそれぞれ関連づけるテーブルを参照する例について説明する。これら複数の閾値と複数の補正値とは、正側と負側に対称的に設けられる。
制御部31が、上記テーブルを参照して、そのテーブルに記述されているいずれの段階の閾値を超えたかにより、上記積算値から減算すべき補正値を決定する。より具体的には、上記変化値を絶対値の増加方向に超える一つ以上の閾値のうち、最も当該変化値との差分が小さい閾値に関連づけられている補正値に決定する。
制御部31は、前回取得した積算値と今回取得した積算値との間の変化が、ゼロから離れる方向への拡散変化のとき、ゼロに近づく方向への収束変化のときより、ゼロに近づける程度の大きい補正値を今回取得した積算値から減算してもよい。上記変化値が正の値の場合、上記移動量信号が正の範囲では拡散変化となり、負の範囲では収束変化となる。逆に、上記変化値が負の値の場合、上記移動量信号が正の範囲では収束変化となり、負の範囲では拡散変化となる。なお、収束変化では補正値を常に0とすることも可能である。すなわち、収束変化では上記減算処理を行わず、拡散変化のときのみ上記減算処理を行うことも可能である。
たとえば、拡散変化のとき上記テーブルで決定された補正値に1を超える係数を乗算した値を、上記積算値から減算すべき補正値としてもよい。逆に、収束変化のとき上記テーブルで決定された補正値に1未満の係数を乗算した値を、上記積算値から減算すべき補正値としてもよい。また、あらかじめ上記テーブルを拡散変化用と収束変化用の二種類設けてもよい。
図16は、実施の形態5の実施例1に係るテーブル312の一例を示す図である。このテーブル312では、閾値は-36から36まで4刻みで段階的に設定される。補正値はそれら閾値に対応して、-9から9まで1刻みで段階的に設定される。これら複数の閾値と複数の補正値は、正側と負側とで対称的に設定される。
たとえば、上記変化値が-34の場合、閾値(-32)を絶対値の増加方向に超え、閾値(-36)を超えないため、補正値として-8が指定される。制御部31は、上記変化値が拡散変化の場合、-8に係数1.2を乗算した-9.6を上記積算値から減算すべき補正値としてもよい。
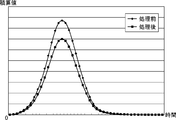
図17は、実施の形態5の実施例1に係る、積算値の補正処理前と処理後とを比較した図である。図17内にて菱形の点を結ぶ線が補正処理前の積算値の推移を示し、正方形の点を結ぶ線が補正処理後の積算値の推移を示す。菱形の点および正方形の点はいずれも、積算値のサンプリング点を示す。図17を参照すると、補正処理後の方が積算値の推移がゼロ方向に収束されることが分かる。なお上述した、所定の時間間隔、複数の閾値、および複数の補正値は、実験結果やシミュレーション結果にもとづき、設計者により任意に設定される。
以上説明したように実施の形態5の実施例1によれば、積分回路36のレジスタ内に保持される積算値から、その変化に応じた、ゼロ方向に近づけるための補正値を減算するため、当該積算値の変動を抑制することができる。この処理を、当該積算値が小さい段階において適用すると、レンズの過敏な反応を抑制し、振動補正機能の精度を高めることができる。また、積算値の変化が大きいほど、ゼロ方向に近づける程度の高い補正値を減算するため、振動補正機能自体を損なわずに、上記積算値の変動を抑制することができる。さらに、上記テーブルを使用することにより、上記変化値の大きさに応じて上記補正値を柔軟に設定することができる。たとえば、上記変化値が非常に大きい場合、そのときの加速度信号をノイズとみなして、その加速度信号を無効とする設定も可能である。
つぎに、実施の形態5の実施例2について説明する。この実施例2に係る補正処理も、実施例1と同様に上記積算値が小さい段階において実行されることが好適である。
制御部31は、上記レジスタに保持されている積算値を所定の時間間隔で取得し、前回取得した積算値と今回取得した積算値との変化値を求める。そして、今回取得した積算値から、当該変化値を所定の設定値で除算した補正値を減算して上記レジスタに再設定する。たとえば、当該設定値を4に設定した場合、上記変化値が10で上記補正値が2となる。ここでは小数点以下を切り捨てているが、小数点以下をどのように処理するかは設計者が適宜、設定することができる。この積算値の補正処理前と処理後とでは図17と同様に、補正処理後の方が積算値の推移がゼロ方向に収束される。
上記設定値は、前回取得した積算値と今回取得した積算値との間の変化が、ゼロから離れる方向への拡散変化のとき、ゼロに近づく方向への収束変化のときより、小さな値に設定されてもよい。たとえば、上記設定値を拡散変化のとき3に、収束変化のとき4に設定する。なお、収束変化のときは上記除算処理および上記減算処理を行わないことも可能である。なお上述した、所定の時間間隔および所定の設定値は、実験結果やシミュレーション結果にもとづき、設計者により任意に設定される。
以上説明したように実施の形態5の実施例2によれば、上記テーブルに関する考察を除き、実施例1と同様の効果を奏する。さらに、実施例1と比較し、テーブルを使用しないため、構成を簡素化することができる。
つぎに、実施の形態5の実施例3について説明する。この実施例3に係る補正処理は、実施例1、2と異なり、振動補正機能発動中、パンニング状態中またはチルティング状態中のいずれの期間にも適用可能である。
制御部31は、上記レジスタに保持されている積算値を所定の時間間隔で取得し、前回取得した積算値と今回取得した積算値との変化値を求める。その変化値が所定の設定時間、継続的に所定の閾値以下のとき、その設定時間の終了時点に上記レジスタに保持されている積算値から、その値をゼロに近づけるための補正値を減算して上記レジスタに再設定する。上記変化値は正の場合と負の場合があるため、上記閾値として同じ絶対値を持つ値が正側と負側に一組設けられる。より厳密には、上記変化値が上記閾値以下とは、絶対値の増加方向に対して上記閾値以下であることを意味する。上記補正値は固定値であってもよい。上記閾値と同様に、同じ絶対値を持つ値が正側と負側に一組設けられる。
図18は、実施の形態5の実施例3に係る積算値の推移を示す図である。図18は上記加速度信号が積分回路36に加わっていない状態を示している。すなわち、新たに加算すべき入力値が入力されていない状態を示す。この場合、上記変化値が継続的に上記閾値以下となる上記設定時間が、連続することになる。よって、各設定時間の終了時点で上記積算値から上記補正値が減算される。当該積算値が正の範囲にある場合、正の固定値が減算され、当該積算値が負の範囲にある場合、負の固定値が減算される。
実施の形態5の実施例3に係る補正処理は、実施の形態5の実施例1と組み合わせて使用することが好適である。実施例3に係る閾値を、実施例1に係る段階的に設定される複数の閾値のうち、絶対値が一番小さい閾値に設定するとよい。図16の例では、実施例3に係る閾値を±4に設定する。これにより、上記変化値が所定の設定時間、継続的に当該閾値以下のとき、その設定時間の終了時点で上記レジスタに保持されている積算値から、±1が減算されることになる。
実施の形態5の実施例3に係る補正処理は、上述した実施の形態2において、制御部31が、パンニング状態またはチルティング状態であると判定した場合に、上記レジスタに保持されている積算値を減少させる際にも適用可能である。なお上述した、所定の時間間隔、所定の閾値、所定の設定時間、およびゼロ方向に近づけるための補正値は、実験結果やシミュレーション結果にもとづき、設計者により任意に設定される。
以上説明したように実施の形態5の実施例3によれば、加速度信号の変化が小さいまたはゼロの状態で、積分回路のレジスタ内の積算値を徐々にゼロに近づけることにより、ユーザに気づかれずにレンズの位置を中心位置に戻すことができる。
以上、本発明をいくつかの実施の形態をもとに説明した。この実施の形態は例示であり、それらの各構成要素や各処理プロセスの組合せにいろいろな変形例が可能なこと、またそうした変形例も本発明の範囲にあることは当業者に理解されるところである。
実施の形態1~5では、振動検出素子60、位置検出素子80および駆動素子90として、それぞれジャイロセンサ、ホール素子およびボイスコイルモータが採用可能なことに言及したが、本発明はそれに限られるものではない。たとえば、振動検出素子60は直線方向の加速度を検出するセンサを用いて、加速度信号に基づいて撮像装置500の振動を
検出する構成にすることができる。また、駆動素子90はピエゾ素子やステッピングモータなどを用いることができる。位置検出素子80はMR素子またはフォトスクリーンダイオードなどを用いることができる。
実施の形態1~5では、レンズを駆動させて手振れ補正処理を行うレンズシフト式としたが、本発明はこれに限られるものではない。たとえば、本発明は撮像装置500のぶれに応じて撮像素子200をシフトさせる撮像素子シフト方式にも適用することができる。このとき、位置検出素子80は撮像素子200の位置を検出し、駆動素子90は撮像素子200を駆動する素子とすることができる。
実施の形態1では、制御部31は、上記移動量信号の振幅値が上記外側閾値と上記内側閾値との間に存在するとき、ハイパスフィルタ34bの能力を有効にし、それ以外のときハイパスフィルタ34bの能力を無効にするよう制御した。この点、このハイパスフィルタ34を図3に示したようなデジタルフィルタで構成し、そのデジタルフィルタをつぎのように制御してもよい。制御部31は、上記移動量信号の振幅値が上記外側閾値と上記内側閾値との間に存在するとき、当該デジタルフィルタをハイパスフィルタとして機能させ、それ以外のときローパスフィルタとして機能させるよう制御する。当該デジタルフィルタの係数を変更することにより、ハイパスフィルタとローパスフィルタとの間で切り替えることができる。上記弱振動補正状態に遷移すべき状態ではない、通常の振動補正状態では当該デジタルフィルタをローパスフィルタとして機能させることができるため、加速度信号の高周波ノイズを除去した後の加速度信号を積分回路36に入力することができる。