RU2635751C2 - Система и способ для инспектирования подводных трубопроводов - Google Patents
Система и способ для инспектирования подводных трубопроводов Download PDFInfo
- Publication number
- RU2635751C2 RU2635751C2 RU2011152497A RU2011152497A RU2635751C2 RU 2635751 C2 RU2635751 C2 RU 2635751C2 RU 2011152497 A RU2011152497 A RU 2011152497A RU 2011152497 A RU2011152497 A RU 2011152497A RU 2635751 C2 RU2635751 C2 RU 2635751C2
- Authority
- RU
- Russia
- Prior art keywords
- module
- determining
- pipeline
- magnetic
- defect
- Prior art date
Links
Images





Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F17—STORING OR DISTRIBUTING GASES OR LIQUIDS
- F17D—PIPE-LINE SYSTEMS; PIPE-LINES
- F17D5/00—Protection or supervision of installations
- F17D5/02—Preventing, monitoring, or locating loss
- F17D5/06—Preventing, monitoring, or locating loss using electric or acoustic means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F17—STORING OR DISTRIBUTING GASES OR LIQUIDS
- F17D—PIPE-LINE SYSTEMS; PIPE-LINES
- F17D1/00—Pipe-line systems
- F17D1/02—Pipe-line systems for gases or vapours
- F17D1/04—Pipe-line systems for gases or vapours for distribution of gas
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F17—STORING OR DISTRIBUTING GASES OR LIQUIDS
- F17D—PIPE-LINE SYSTEMS; PIPE-LINES
- F17D1/00—Pipe-line systems
- F17D1/08—Pipe-line systems for liquids or viscous products
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F17—STORING OR DISTRIBUTING GASES OR LIQUIDS
- F17D—PIPE-LINE SYSTEMS; PIPE-LINES
- F17D3/00—Arrangements for supervising or controlling working operations
- F17D3/01—Arrangements for supervising or controlling working operations for controlling, signalling, or supervising the conveyance of a product
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N27/00—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means
- G01N27/72—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating magnetic variables
- G01N27/82—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating magnetic variables for investigating the presence of flaws
- G01N27/83—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating magnetic variables for investigating the presence of flaws by investigating stray magnetic fields
- G01N27/87—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating magnetic variables for investigating the presence of flaws by investigating stray magnetic fields using probes
Abstract
Группа изобретений включает систему и способ для инспектирования подводного трубопровода. Способ содержит шаги: обнаружение дефектов вдоль подводного трубопровода с использованием погружаемого под воду модуля, использующего способ магнитной томографии, (модуль МТМ), в непосредственной близости от подводного трубопровода; и определение положения погружаемого под воду модуля МТМ и тем самым определение местоположения дефекта. Способ дополнительно содержит определение положения погружаемого под воду модуля МТМ относительно надводного судна; и определение абсолютного положения надводного судна. 2 н. и 13 з.п. ф-лы, 7 ил., 3 табл.
Description
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
В общих чертах настоящее изобретение относится к системе и способу инспектирования подводных трубопроводов.
УРОВЕНЬ ТЕХНИКИ
Трубопроводы, например, те, которые используются в нефтяной и газовой промышленности, требуют регулярных проверок и технического обслуживания, прежде чем случится дорогостоящая авария. Традиционный способ оценки технического состояния трубопровода обычно включает дефектоскопию с использованием внутритрубного инспектирования для определения местоположения и оценки параметров отдельных дефектов металла, объединения дефектов в группы (кластеры), с использованием метода экспертной оценки (без указания правил объединения), расчета уровня напряженно-деформированного состояния в кластерных зонах для оценки их опасности, и расчета допустимого рабочего давления и оценки факторов качества ремонта для кластеров коррозионного происхождения на основе остаточной толщины стенки трубы с дефектами типа «потеря металла» (коррозия).
Однако имеются некоторые ограничения для вышеуказанного способа. Например, внутритрубное инспектирование с использованием интеллектуальных внутритрубных дефектоскопов недоступно для целого ряда объектов, которые не подлежат внутритрубному инспектированию или требует значительных расходов для подготовки объекта для прогона внутритрубного дефектоскопа. Если способ внутритрубного инспектирования подходит для решения первой задачи (непосредственно дефектоскопии), то он менее применим для оценки сравнительной степени опасности дефектов (например, путем ранжирования), или для расчета работоспособности участков трубопровода с различными дефектами. Кроме того, традиционные расчеты заключаются только в оценке опасности групп дефектов (кластеров), таких как "потеря металла" (коророзия). Задача оценки скорости коррозии (прогноз коррозии или мониторинг) не решена и, как правило, эту задачу решают повторным прогоном инструментов-дефектоскопов.
Кроме того, в приведенном выше традиционном способе не дается оценка стабильности трещин, то есть не дается прогноз скорости развития трещиноподобных дефектов, особенно в продольном направлении трубопровода. Также не дается оценка опасности других типов дефектов (например, сварных швов) из-за условий эксплуатации, так как оценка деградации свойств металла из-за агрессивных условий и аномалий напряженно-деформированного состояния не проводится. Например, есть участки трубопровода с провисами, изгибами, напряжениями /растяжениями/кручениями, то есть участки с потерей устойчивости трубопровода, например, из-за промывов во время сильных дождей, оползней, обрывов, оврагов и зон сейсмической активности. Кроме того, главная проблема - степень концентрации напряжений на отдельно взятом участке трубопровода - не решается, она должна учитываться инженерами из департамента целостности трубопроводов компании/оператора, например, путем экспертной оценки.
В качестве альтернативы указанному выше способу предлагается способ магнитометрический томографии (МТМ - magnetometric tomography method). Способ магнитометрический томографии (МТМ) является бесконтактным методом неразрушающего контроля и технической диагностики на основе дистанционного сканирования магнитного поля ферромагнитных трубопроводов в системе ортогональных координат. Кроме того, применяется ручная обработка и калибровка для определения местоположения участков с дефектами металла различных типов, чтобы выделить тип наиболее опасных дефектов и оценить работоспособность дефектных участков в зависимости от степени концентрации механических напряжений.
Однако в настоящее время способ магнитометрический томографии (МТМ) применяется только для наземных обследований. Кроме того, современные возможности магнитометра лимитированы максимальным расстоянием при работе, равным 20 диаметров трубы. Таким образом, такие традиционные способы магнитометрический томографии (МТМ) не подходят для многих морских (то есть подводных) трубопроводов, которые могут быть расположены на значительных глубинах. Скорость инспекции также ограничена 2 метрами в секунду (м/с), и запись расстояния, как правило, производится вручную. Кроме того, анализ собранных данных производится в большинстве случаев вручную, т.е. этот способ тоже полагается на экспертную оценку.
Поэтому существует необходимость для создания системы и способа для инспектирования подводных трубопроводов, которые бы стремились решить по крайней мере некоторые из указанных проблем
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Таким образом, настоящее изобретение направлено на систему и способ для инспектирования подводного трубопровода, которое сделает возможным проинспектировать трубопровод на континентальном шельфе с глубиной 200 м и более с точным определением местоположения зоны дефекта и его типа.
Задачей настоящего изобретения является предложить систему для инспектирования подводного трубопровода, содержащую погружаемый под воду модуль, использующий способ магнитной томографии, далее модуль МТМ, перемещаемый для определения дефекта в непосредственной близости от трубопровода вдоль подводного трубопровода, и средство для определения положения погружаемого под воду модуля МТМ и тем самым определения местоположения дефекта.
В одном аспекте настоящего изобретения в системе средство для определения местоположения погружаемого под воду модуля МТМ содержит средство для определения положения погружаемого под воду модуля МТМ относительно надводного судна; и средство для определения абсолютного положения надводного судна.
В другом аспекте настоящего изобретения в системе средство для определения положения погружаемого под воду модуля МТМ относительно надводного судна содержит по меньшей мере одно из следующего: одометр, Допплеровский лаг для измерения скорости, акселерометр с микроэлектромеханической системой (акселерометр MEMS), соединенные с погружаемым под воду модулем МТМ.
Еще в одном аспекте настоящего изобретения средство для определения абсолютного положения надводного судна содержит приемник системы глобального позиционирования GPS.
Еще в одном аспекте настоящего изобретения в системе временные отметки данных от погружаемого под воду модуля МТМ и средства для определения положения погружаемого под воду модуля МТМ синхронизированы на основе временного сигнала системы GPS.
Еще в одном аспекте настоящего изобретения система дополнительно содержит средство для определения категории дефекта на основе, по меньшей мере, распределения плотности напряженности магнитного поля вдоль оси трубопровода в зоне аномалии.
Еще в одном аспекте настоящего изобретения в системе средство для определения категории дефекта ранжирует дефект на первую, вторую и третью категории, соответствующие немедленному ремонту, планируемому ремонту и без ремонта, соответственно.
Еще в одном аспекте настоящего изобретения система дополнительно содержит средство для определения безопасного рабочего давления трубопровода.
Еще в одном аспекте настоящего изобретения система дополнительно содержит средство для определения продолжительности безопасной работы трубопровода.
Еще в одном аспекте настоящего изобретен в системе погружаемый под воду модуль МТМ установлен на дистанционно управляемом аппарате (ROV).
Еще в одном аспекте настоящего изобретения в системе погружаемый под воду модуль МТМ размещен по меньшей мере на расстоянии 1 м от двигателей дистанционно управляемого аппарата (ROV).
Другой задачей настоящего изобретения является предложить способ инспектирования подводных трубопроводов, содержащий шаги: обнаружение дефектов вдоль подводного трубопровода с использованием погружаемого под воду модуля, использующего способ магнитной томографии (модуль МТМ), в непосредственной близости от подводного трубопровода; и определение положения погружаемого под воду модуля МТМ и тем самым определение местоположения дефекта.
В одном аспекте настоящего изобретения в заявленном способе шаг определения положения погружаемого под воду модуля МТМ содержит: определение положения погружаемого под воду модуля МТМ относительно надводного судна; и определение абсолютного положения надводного судна.
В другом аспекте настоящего изобретения способ дополнительно содержит синхронизацию временных отметок данных от погружаемого под воду модуля МТМ и от оборудования для определения положения погружаемого под воду модуля МТМ на основе временного сигнала системы GPS.
В другом аспекте настоящего изобретения способ дополнительно содержит определение категории дефекта на основе, по меньшей мере, распределения плотности напряженности магнитного поля вдоль оси трубопровода в зоне аномалии.
В другом аспекте настоящего изобретения способ дополнительно содержит ранжирование дефекта на первую, вторую и третью категории, соответствующие немедленному ремонту, планируемому ремонту и без ремонта.
Еще в одном аспекте настоящего изобретения способ дополнительно содержит определение безопасного рабочего давления трубопровода.
Еще в одном аспекте настоящего изобретения способ дополнительно содержит определение продолжительности безопасной работы трубопровода.
Настоящее изобретение делает возможным определить точное местоположение погружаемого под воду модуля МТМ на трубопроводе, когда вы перемещаете его под водой вдоль трубопровода и таким образом точно определить местоположение дефекта, если дефект зарегистрирован.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примеры осуществления изобретения будут более понятны и достаточно очевидны специалистам из последующего описания, которое используется только в качестве примера, и в сочетании с рисунками, на которых:
на Фиг. 1 показана схема, иллюстрирующая реализацию системы для инспектирования подводных трубопроводов в соответствии с настоящим изобретением;
на Фиг. 2 показана блок-схема, иллюстрирующая коммуникационные интерфейсы системы на Фиг. 1;
на Фиг. 3 показана блок-схема, иллюстрирующая расположение компонентов системы на дистанционно управляемом аппарате (ROV), который представлен на Фиг. 1 в соответствии с примером осуществления изобретения;
на Фиг. 4 показано трехмерное изображение примера реализации подводного блока, который представлен на Фиг. 3 в соответствии с примером осуществления изобретения;
на Фиг. 5 показана схема, иллюстрирующая работу системы на Фиг. 1, в соответствии с примером осуществления изобретения;
на Фиг. 6 показана блок-схема, иллюстрирующая способ инспектирования подводного трубопровода в соответствии с примером осуществления изобретения;
на Фиг. 7 показана блок-схема, иллюстрирующая вычислительное устройство для реализации способа и системы в соответствии с примером осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
На Фиг. 1 показан рисунок, иллюстрирующий пример реализации системы 100 для инспектирования подводного трубопровода 130 в соответствии с примером осуществления. На Фиг. 2 представлена блок-схема, иллюстрирующая коммуникационные интерфейсы системы, которая показана на Фиг. 1.
В данном примере осуществления изобретения, система 100 состоит из блока управления 102, расположенного на борту судна 110 и подводного блока 112, который крепится к дистанционно управляемому аппарату 120 (ROV), который находится в непосредственной близости, но не в контакте с подводным трубопроводом 130. Дистанционно управляемый аппарат 120, как правило, привязан к надводному судну 110 с помощью отрывного кабеля или троса 106, как то будет решено специалистами. Оператор (не показан) на борту надводного судна 110 может контролировать движение дистанционно управляемого аппарата 120 (ROV) вдоль подводного трубопровода 130. Надводное судно 110 в данном примере осуществления изобретения способно принимать сигналы (например, времени и местоположения) от спутниковой глобальной системы позиционирования 140 (GPS). Кроме того, надводное судно 110 и подводный блок имеют соответствующее оборудование навигации и оборудование отслеживания 104, 114. Оборудование навигации и отслеживания 104 включает в себя навигационное оборудование системы GPS для надводного судна 110, а также оборудование для отслеживания дистанционно управляемого аппарата 120 (ROV).
Как показано на Фиг. 2, подводный блок 112 включает в себя встроенный компьютер 214, соединенный с сетевым концентратором 212 дистанционно управляемого аппарата 120 (ROV) (Фиг.1). Сетевой концентратор 212 дистанционно управляемого аппарата 120 (ROV) имеет связь с блоком управления 102 через сетевой концентратор 202. Блок управления 102 дополнительно содержит контроллер 204 и вычислительное устройство в виде персонального компьютера (PC) 208. Контроллер 204 имеет связь с приемником таймера 206 системы GPS и навигационным оборудованием 104 надводного судна 110. Интерфейсы между соответствующими компонентами, как описано выше, включают, но не ограничиваются, блоки RS-485, RS-232, RS-422 и Ethernet, на усмотрение специалистов в данной области.
Некоторые части описания, которое следует далее, явно или неявно представлены в виде алгоритмов и функциональных или символических представлений действий с данными в памяти компьютера. Эти описания алгоритмов и функциональные или символические представления являются средствами, которыми оперируют специалисты в области обработки данных, чтобы наиболее эффективно передать содержание своей работы для других специалистов. Здесь алгоритм, как обычно, задуман для автоматического согласованная последовательности шагов, ведущей к желаемому результату. Шаги заключаются в физической обработке физических величин, таких, как электрические, магнитные или оптические сигналы, которые могут храниться, передаваться, комбинироваться, сравниваться и подвергаться другой обработке.
Если специально не указано иное, и, как видно из следующего описания, будет правильно, что протяжении настоящего описания, обсуждения с использованием таких терминов, как "сканирование", "расчет", "определение", "замена", "генерация", "инициализации", "вывод", или подобных, относятся к действиям и процессам в компьютерной системе или аналогичном электронном устройстве, которые обрабатывают и преобразуют данные, представленные в виде физических величин, в рамках компьютерной системы в другие данные, аналогично представленные в виде физических величин в компьютерной системе или других устройствах для сохранения информации, передачи информации и отображения информации.
Данное описание также раскрывает устройство для проведения действий способа. Такое устройство может быть специально построено для данных целей, или может состоять из общецелевого компьютера или другого устройства, выборочно активированного или измененного (реконфигурированного) с помощью компьютерной программы, хранящейся в данном компьютере. Алгоритмы и изображения, представленные здесь, по сути не связаны с каким-либо конкретным компьютером или другим устройством. Различные механизмы общего назначения могут быть использованы с программами в соответствии с указаниями в настоящем описании. В качестве альтернативного варианта может быть целесообразным создание более специализированной аппаратуры для выполнения требуемых операций способа. Структура обычного общецелевого компьютера приведена ниже.
Кроме того, настоящее описание также неявно раскрывает компьютерную программу, благодаря которой специалисту в данной области понятно, что отдельные шаги способа, описанного здесь, могут быть осуществлены с помощью встроенной компьютерной программы. Здесь не планируется, что компьютерная программа должна быть ограничена каким-либо отдельным языком программирования и использованием только этого языка. Будет хорошо, если будут использоваться множество языков программирования и шифрования для реализации указаний в представленном описании. Кроме того, здесь не подразумевается, что компьютерная программа должна быть ограничена какой-либо частной управляющей логикой. Есть много других вариантов компьютерных программ, которые могут использовать различные управляющие логики, не отступая от духа или объема изобретения.
Кроме того, один или больше шагов компьютерной программы может быть выполнен скорее параллельно, чем последовательно. Такая компьютерная программа может быть сохранена на любой считываемой компьютером среде. Считываемая компьютером среда может включать устройства хранения, такие как магнитные или оптические диски, микросхемы памяти, или другие устройства хранения, подходящие для того, чтобы взаимодействовать с обычным целевым компьютером. Считываемая компьютером среда может также включать среду со встроенной программой, такую, как представленные в системе Интернет, или беспроводной средой, такой, какая представлена в системе мобильного телефона GSM. Компьютерная программа, когда она загружена и приведена в действие на таком общецелевом компьютере, эффективно воздействует на устройство, которое осуществляет шаги представленного способа.
Если вернуться к Фиг. 1 и 2, в данном примере осуществления подводный блок 112 воспринимает и регистрирует магнитное поле (например, в единицах микроТесла (μТ) по оси X, оси Y и оси Z соответственно), создаваемое напряженной стенкой трубы, во время движения дистанционно управляемого аппарата 120 (ROV) вдоль трубопровода 130. В этом примере осуществления изобретения данные магнитного поля регистрируются обычно приблизительно каждые 2 сантиметра (см) на протяжении всей длины, используя для контроля пройденного расстояния по крайней мере один из приборов, например, одометр, Доплеровский лаг для регистрации скорости и акселерометры с микроэлектромеханическими системами (MEMS). Подводный блок 112 не производит считывания магнитометрических данных на одном и том же участке, если дистанционно управляемый аппарат 120 (ROV) не перемещается.
Кроме того, в данном примере осуществления изобретения временной сигнал системы GPS, полученный Приемником 206 таймера GPS, предоставляется всем компонентам системы 100, включая подводный блок 112, таким образом, что все данные системы 100 синхронизированы со временем GPS. Например, отметки времени в навигационном журнале надводного судна 110 совпадают с теми, которые находятся в магнитометрическом журнале подводного блока 112.
На Фиг. 3 показана блок-схема, иллюстрирующая размещение компонентов на дистанционно управляемом аппарате 120 (ROV) Фиг. 1 в соответствии с примером осуществления изобретения. Как показано на Фиг. 3, подводный блок 112 помещен в водонепроницаемую капсулу и установлен на дистанционно управляемом аппарате 120 (ROV). Подводный блок 112 включает в себя подводный модуль 302, использующий способ магнитной томографии (модуль МТМ) (например, модель МБС СКИФ-04, производимый предприятием Транскор-К) для определения и регистрации данных магнитного поля, и оборудование 114 для навигации и позиционирования для регистрации данных о местоположении.
На Фиг. 4 представлено покомпонентное изображение подводного блока 112 на Фиг. 3 согласно примеру осуществления изобретения. В дополнение к подводному модулю МТМ 302 и оборудованию 114 для навигации и позиционирования подводный блок 112 включает встроенный компьютер 214 (как это показано на Фиг. 2), электропитание в форме батарей 402 и водонепроницаемый корпус 404, образующий капсулу. Корпус 404 обычно изготавливается из неферромагнитного материала. Кроме того, предпочтительно в данном примере осуществления изобретения подводный блок 112 расположен по крайней мере приблизительно на расстоянии 1 метра (m) от двигателей дистанционно управляемого аппарата 120 (ROV), чтобы минимизировать эхо.
На Фиг. 5 представлено схематическое изображение, иллюстрирующее работу системы 100 на Фиг. 1 согласно примеру осуществления изобретения. Как показано на Фиг. 5, входные сигналы оборудования 114 для навигации и позиционирования (Фиг. 1) в данном примере осуществления изобретения включают временной импульс 502 системы GPS, который получает Приемник Таймера GPS 206 (Фиг. 2), и который синхронизирован по всей системе 100, данные 504 Допплеровского лага регистрации скорости и данные 506 акселерометра MEMS. Данные 504 Допплеровского лага регистрации скорости, которые обычно выражены в см/с, конвертируются в данные 508 расстояния (например, в см), используя функциональный элемент 510, например, используя встроенный компьютер 214 (Фиг. 2). Точно так же данные 506 акселерометра MEMS, которые обычно, как ускорение, измеряются в м/с2, конвертируются в данные 512 расстояния (например, в см) через последовательные функциональные элементы 514, 516. Временной импульс 502 и данные расстояния 508, 512 передаются затем фильтру Калмана 518 для того, чтобы произвести единственный импульс расстояния 520, например, импульс для 2-х см, с соответствующими временными данными 522. Квалифицированному специалисту понятно, что в данном примере осуществления изобретения фильтр Калмана 518 имеет способность выбрать лучшие показания от двух или больше источников (то есть входных сигналов).
В то же самое время в этом примере осуществления погружаемый под воду модуль МТМ 302, который обнаруживает и записывает магнитное поле, излучаемое стенкой трубы, с интервалом приблизительно 2 см, генерирует магнитометрические данные 524, соответствующие вышеупомянутым импульсу расстояния 520 и временным данным 522. Импульс расстояния 520, временные данные 522 и магнитометрические данные 524 передаются на блок управления 102 (Фиг. 1) для дальнейшей обработки, например, вычисления местоположения любого дефекта/аномалии, расчета серьезности такого дефекта/аномалии.
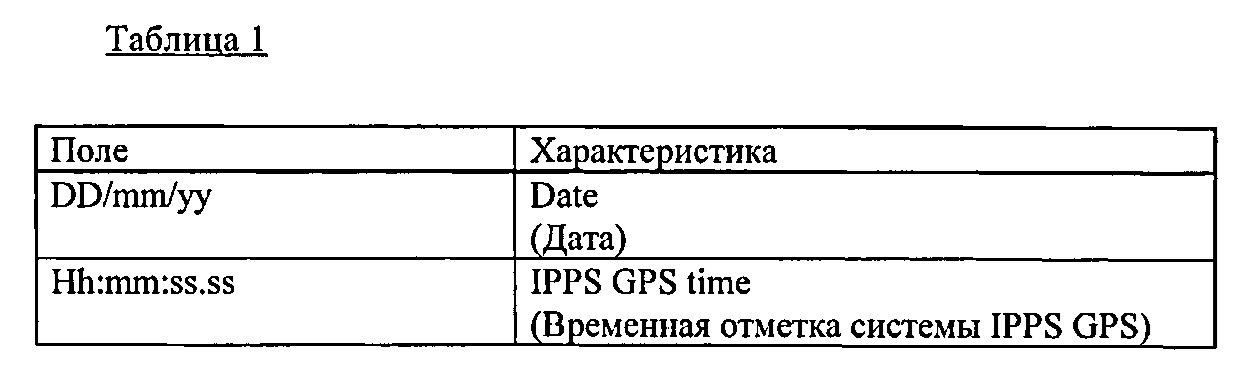
Система 100 по этому примеру осуществления способна работать в режиме «онлайн» (работа с сетью в режиме реального времени) или в режиме «оффлайн» (автономная работа без подключения к сети). В режиме «онлайн» система 100 принимает и магнитометрические данные с временной меткой GPS и навигационные данные в режиме реального времени. В режиме «оффлайн» система 100 в режиме реального времени принимает магнитометрические данные, но навигационные данные принимает только после того, как исследование завершено, например, с использованием съемного устройства, такого как флэш-накопитель с универсальной последовательной шиной (флэш-накопитель USB). Обычно навигационные данные включают в себя по меньшей мере абсолютные координаты дистанционно управляемого аппарата 120 (ROV) (и, следовательно, подводного блока 112 и любых дефектов / аномалий) с временными метками GPS, и данные километровых отметок (КР / kilometer post) - расстояние, пройденное дистанционно управляемым аппаратом 120 (ROV) вдоль трубопровода, начиная с момента движения. В этом примере осуществления изобретения навигационные данные предоставляются в кодах американского стандартного кода для обмена информацией (ASCII). Магнитометрические данные и навигационные данные сохраняются совместно в базе данных персонального компьютера PC 208 управляющего блока 102 (Фиг. 2) для последующей обработки.
В таблице 1 представлены элементы навигационных данных для данного примера осуществления.

В таблице 2 представлены элементы магнитометрических данных согласно примеру осуществления изобретения.

В качестве примера, компьютер PC 208 рассчитывает координаты дистанционно управляемого аппарата 120 (ROV) относительно надводного судна 110 для конкретной временной отметки на основе навигационных данных дистанционно управляемого аппарата 120 (ROV). Затем эти координаты соединяются с абсолютными координатами надводного судна ПО, принятыми со спутника GPS, для этой же временной отметки, чтобы определить абсолютные координаты дистанционно управляемого аппарата 120 (ROV). Если обнаружены аномалии в магнитометрических данных для этой же временной отметки, такая аномалия связывается с координатой, которая была определена. Согласно примеру осуществления изобретения, считывая и обрабатывая все данные, собранные в инспекционной проверке, определяются местоположения потенциальных дефектов, которые соответствуют аномалиям в магнитометрических данных.
Кроме того, согласно примеру осуществления изобретения, система способна оценить степень опасности дефекта, путем расчета безопасного рабочего давления трубопровода, и путем расчета продолжительности безопасной работы трубопровода. Интегральный индекс F степени опасности дефекта, который принимает во внимание протяженность магнитной аномалии, амплитуду и конфигурацию распределения вектора интенсивности магнитного поля, превышающие фоновые значения, рассчитываются, согласно примеру осуществления изобретения, на основе следующей формулы:

где А означает корректирующий коэффициент, характеризующий влияние дефектов трубопровода на изменение магнитного поля, и обычно определяется после процедуры калибровки; Qaн, Qф (А/м) означают соответственно плотность распределения напряженности магнитного поля вдоль оси трубопровода в аномальной зоне и в "calm" фоновой зоны. Обычно плотность определяется на длине участка кривой. В данном изобретении кривая является геометрическим местом точек интенсивности магнитного поля в пространстве соответственно:

где dHx, dHy, dHz означают значения вектора изменения напряженности магнитного поля (А/м2) соответственно.
В данном изобретении, Qaн и Qф рассчитывают путем интегрирования dQ по длине аномалии и фоновым зонам соответственно.
Рассчитанные значения индекса F сохраняют, например, в базе данных обнаруженных дефектов, а также в виде графиков распределения аномалий. Таблица 3 предоставляет ранжирование мест (то есть местоположений) с магнитными аномалиями на основе степени их опасности. На месте с первым рангом по опасности, ремонтно-восстановительные работы выполняются в первую очередь. На месте со вторым рангом по опасности планируются плановые ремонтно-восстановительные работы. На месте с третьим рангом по опасности работа трубопровода разрешается без ремонтно-восстановительных работ.

Дополнительно, в данном примере осуществления изобретения безопасное давление для работы трубопровода Psafe рассчитывают на основе относительной степени опасности дефекта.
Для секций с дефектами с первым рангом по опасности (т.е. 0≤F≤0,2),

Для секций с дефектами со вторым рангом по опасности (т.е. 0,2≤F≤
0,55):

Для секций с дефектами с третьим рангом по опасности (т.е. F≥0,55):
где Рoper означает давление в трубопроводе на момент инспектирования, измеренное в мегапаскалях (МРа); Pdesign означает проектное давление в трубопроводе (в МРа); и Psafe означает безопасное рабочее давление в трубопроводе (в МРа).
Если рассчитанное значение безопасного рабочего давления Psafe превышает проектное давление Pdesign, трубопровод предпочтительно работает при проектном давлении. Оценка технического состояния трубопровода может также выполняться на основе коэффициента безопасного давления «CSP», где:

Согласно примеру осуществления изобретения, при CSP≥1, дефект определяется как критический и подлежащим первоочередному ремонту.
Для кратковременной работы трубопровода максимально допустимое рабочее давление Рmax (известное также как МАОР), согласно примеру осуществления изобретения, рассчитывают:
где τ означает коэффициент кратковременного увеличения давления, который определяется проектной организацией и, согласно примеру осуществления изобретения, может изменяться в диапазоне от 1,1 до 1,15.
Согласно примеру осуществления изобретения, продолжительность безопасной работы трубопровода (т.е., безаварийной работы) - Tsafe рассчитывают из условия, что трубопровод работает при расчетном безопасном давлении, как описано выше с учетом уравнений (3)-(6). После выполнения ремонта всех обнаруженных дефектов продолжительность безопасной работы трубопровода устанавливают не более 90% от расчетного значения. Для каждого обнаруженного дефекта согласно примеру осуществления изобретения расчеты выполняют с использованием следующей формулы:
где Кр означает коэффициент, учитывающий давление в трубопроводе; KF означает коэффициент, учитывающий степень опасности дефекта; и Kt означает коэффициент, который принимает во внимание продолжительность работы трубопровода.
Например, если трубопровод работает при проектном давлении, то Кр=1, в ином случаее:

Кроме того, 
Kt учитывает влияние рабочих факторов, в частности, вероятность разрушения трубопровода в первые 3 года эксплуатации из-за строительно-монтажных дефектов и из-за коррозионного разрушения после 5-7 лет эксплуатации.
где Т означает нормативную продолжительность эксплуатации трубопровода (измеряемую в годах), a ΔT означает продолжительность работы трубопровода, начиная с момента ввода его в эксплуатацию (измеряется в годах).
На Фиг. 6 показана блок-схема 600, иллюстрирующая способ инспектирования подводного трубопровода в соответствии с осуществлением изобретения. На шаге 602, дефект вдоль подводного трубопровода обнаруживают с использованием погружаемого под воду модуля МТМ (модуль, использующий способ магнитной томографии), расположенного рядом с подводным трубопроводом. На шаге 604, определяют местоположение погружаемого под воду модуля МТМ, определяя тем самым местоположение этого дефекта.
Согласно примеру осуществления изобретения, предлагаемые способ и система могут дать преимущественную возможность для трубопроводов, в которых нельзя использовать внутритрубную дефектоскопию с побережья. Даже для подводных трубопроводов, которые могут использовать внутритрубную дефектоскопию, необходимость предварительной подготовки трубопровода для инспектирования (то есть - очистка внутренней полости трубопровода, проверка геометрии перед прогоном диагностического модуля-дефектоскопа, размещение опорных точек, намагничивание металла трубопровода) преимущественно может быть уменьшена. Также не требуется дополнительное оборудование для запуска дефектоскопа / приема дефектоскопа. Таким образом, по сравнению с известными способами, такими как использование интеллектуального дефектоскопа, может быть уменьшена стоимость.
Дополнительно, согласно примеру осуществления изобретения, способ и система могут иметь высокую чувствительность, в связи с бесконтактной регистрацией магнитного поля трубопровода и фильтрацией значимого сигнала над помехой. Это означает, что дефекты металла, вызванные напряженно-деформированным состоянием, обычно не теряются во время инспектирования. Преимущественно, в настоящем изобретении регистрируется изменение магнитного поля целой дефектной секции, а не отдельного дефекта. То есть, согласно примеру осуществления изобретения, способ и система могут предоставить количественную оценку концентратора напряжений F для всех взаимосвязанных дефектов регистрируемой магнитной аномалии (или аномалии напряженно-деформированного состояния, получаемой из кластера).
Кроме того, согласно примеру осуществления изобретения, способ и система могут иметь преимущественно единственный дефектоскоп для инспектирования трубопроводов разного размера, и дает возможность оценить степень опасности дефектов разного типа на основе унифицированного количественного индекса F значения концентратора напряжений. Предпочтительно, это дает возможность выполнить оценку факторов качества ремонта (EFR) для дефектов типа «потеря металла», и других типов, таких как: «трещино-подобные» дефекты, дефекты сварных швов, «нарушение сплошности», «изменения геометрии» и т.д. Поэтому, возможно выполнить расчеты ремонтопригодности для всех типов дефектов, а не только дефектов типа «потеря металла» (коррозия).
В данном изобретении способ и система могут быть реализованы с помощью вычислительной системы, схематически показанной на Фиг. 7. Она может быть реализована как программное обеспечение, такое как компьютерная программа, выполняющаяся в вычислительной системе 700, и выдача команд вычислительной системе 700, чтобы выполнять способ по настоящему изобретению.
Вычислительная система 700 содержит вычислительный модуль 702 модули ввода, такие как клавиатура 704 и мышь 706 и множество устройств вывода, таких как дисплей 708 и принтер 710.
Вычислительный модуль соединен с вычислительной сетью 712 с помощью приемлемого приемопередатчика 714, чтобы получить доступ, например, к Интернету и другим сетевым системам, таким как локальная сеть (LAN), или глобальная сеть (WAN).
Вычислительный модуль 702 в настоящем изобретении включает в себя процессор 718, оперативное запоминающее устройство (RAM) 720 и постоянное запоминающее устройство (ROM) 722. Вычислительный модуль 702 также включает в себя ряд входных / выходных (I/O) интерфейсов, например, I/O интерфейс 724 к дисплею 708, и I/O интерфейс 726 к клавиатуре 704.
Элементы вычислительного модуля 702 обычно обмениваются информацией через встроенную шину 728 способами, известными специалистам из уровня техники.
Прикладные программы обычно поставляются пользователям вычислительной системы 700 в кодированном виде на средствах для хранения данных, таких как диски CD-ROM, или носителях флэш-памяти и считываются с использованием соответствующих дисководов для носителей данных устройства 730 для хранения данных. Прикладная программа считывается и управляется при ее использовании процессором 718. Промежуточное хранение данных программы может быть выполнено с использование оперативного запоминающего устройства (RAM) 720.
Специалистам должно быть понятно, что в настоящем изобретении могут быть сделаны многочисленные изменения и/или модификации, по сравнению с показанными в конкретных примерах осуществления, без отхода от духа и объема изобретения. Поэтому настоящее изобретение должно рассматриваться без ограничений во всех аспектах, которые должны быть описаны.
Claims (24)
1. Система для инспектирования подводного трубопровода, содержащая:
погружаемый под воду модуль, использующий способ магнитной томографии, установленный на дистанционно управляемом аппарате, сконфигурированном, чтобы перемещаться вдоль подводного трубопровода в непосредственной близости от трубопровода, для обнаружения дефекта, при этом модуль, использующий способ магнитной томографии, сконфигурирован, чтобы записывать магнитное поле, излучаемое подводным трубопроводом, и
средства для определения местоположения погружаемого под воду модуля, использующего способ магнитной томографии, на основе записанного магнитного поля, и таким образом определения местоположения дефекта по длине подводного трубопровода.
2. Система по п. 1, в которой средство для определения местоположения погружаемого под воду модуля, использующего способ магнитной томографии, содержит:
средство для определения положения погружаемого под воду модуля, использующего способ магнитной томографии, относительно надводного судна; и
средство для определения абсолютного положения надводного судна.
3. Система по п. 2, в которой средство для определения положения погружаемого под воду модуля, использующего способ магнитной томографии, относительно надводного судна содержит, по меньшей мере, одно из следующего: одометр, Допплеровский лаг для измерения скорости, акселерометр с микроэлектромеханической системой, соединенных с погружаемым под воду модулем, использующим способ магнитной томографии.
4. Система по п. 2, в которой средство для определения абсолютного положения надводного судна содержит приемник системы глобального позиционирования GPS.
5. Система по п. 4, в которой временные отметки данных от погружаемого под воду модуля, использующего способ магнитной томографии, и от средства для определения положения погружаемого под воду модуля, использующего способ магнитной томографии, синхронизированы на основе временного сигнала системы GPS.
6. Система по п. 1, дополнительно содержащая средство для определения категории дефекта на основе, по меньшей мере, распределения плотности напряженности магнитного поля вдоль оси трубопровода в зоне аномалии.
7. Система по п. 6, в которой средство для определения категории дефекта ранжирует дефект на первую, вторую и третью категории, соответствующие немедленному ремонту, планируемому ремонту и без ремонта соответственно.
8. Система по п. 6, дополнительно содержащая средство для определения безопасного рабочего давления трубопровода.
9. Система по п. 6, дополнительно содержащая средство для определения продолжительности безопасной работы трубопровода.
10. Система по п. 9, в которой погружаемый под воду модуль, использующий способ магнитной томографии, размещен по меньшей мере на расстоянии 1 м от двигателей дистанционно управляемого аппарата.
11. Способ инспектирования подводных трубопроводов, содержащий шаги:
запись магнитного поля, излучаемого подводным трубопроводом, используя погружаемый под воду модуль, использующий способ магнитной томографии (МТМ), при этом модуль, использующий способ магнитной томографии, установлен на дистанционно управляемом аппарате, сконфигурированном, чтобы перемещаться вдоль подводного трубопровода в непосредственной близости от трубопровода,
обнаружение дефектов вдоль подводного трубопровода с использованием погружаемого под воду модуля, использующего способ магнитной томографии, в непосредственной близости от подводного трубопровода; и
определение местоположения погружаемого под воду модуля, использующего способ магнитной томографии, и тем самым определение местоположения дефекта.
12. Способ по п. 11, в котором шаг определения местоположения погружаемого под воду модуля, использующего способ магнитной томографии, содержит:
определение положения погружаемого под воду модуля МТМ относительно надводного судна; и
определение абсолютного положения надводного судна.
13. Способ по п. 12, дополнительно содержащий синхронизацию временных отметок данных от погружаемого под воду модуля, использующего способ магнитной томографии, и от оборудования для определения положения погружаемого под воду модуля, использующего способ магнитной томографии, на основе временного сигнала системы GPS.
14. Способ по любому из пп. 11-13, дополнительно содержащий определение категории дефекта на основе, по меньшей мере, распределения плотности напряженности магнитного поля вдоль оси трубопровода в зоне аномалии.
15. Способ по п. 14, дополнительно содержащий ранжирование дефекта на первую, вторую и третью категории, соответствующие немедленному ремонту, планируемому ремонту и без ремонта.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/336,302 US8841901B2 (en) | 2011-07-29 | 2011-12-23 | System and method for inspecting a subsea pipeline |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/RU2011/000572 WO2013019136A1 (en) | 2011-07-29 | 2011-07-29 | System and method for inspecting a subsea pipeline |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2011152497A RU2011152497A (ru) | 2015-09-10 |
| RU2635751C2 true RU2635751C2 (ru) | 2017-11-15 |
Family
ID=47629508
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2011152497A RU2635751C2 (ru) | 2011-07-29 | 2011-07-29 | Система и способ для инспектирования подводных трубопроводов |
Country Status (8)
| Country | Link |
|---|---|
| EP (1) | EP2737242B1 (ru) |
| CN (1) | CN104160203B (ru) |
| BR (1) | BR112014002108B1 (ru) |
| CA (1) | CA2843394C (ru) |
| MY (1) | MY167657A (ru) |
| NO (1) | NO2737242T3 (ru) |
| RU (1) | RU2635751C2 (ru) |
| WO (1) | WO2013019136A1 (ru) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2721473C1 (ru) * | 2019-05-24 | 2020-05-19 | Федеральное государственное автономное образовательное учреждение высшего образования "Национальный исследовательский Томский государственный университет" (ТГУ, НИ ТГУ) | Робот для диагностики и ремонта трубопроводного транспорта |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB201203717D0 (en) | 2012-03-02 | 2012-04-18 | Speir Hunter Ltd | Fault detection for pipelines |
| CA2949220C (en) | 2014-05-18 | 2019-01-08 | The Charles Stark Draper Laboratory, Inc. | System and method of measuring defects in ferromagnetic materials |
| US9743370B2 (en) | 2015-04-28 | 2017-08-22 | The Charles Stark Draper Laboratory, Inc. | Wireless network for sensor array |
| US20170108469A1 (en) | 2015-06-29 | 2017-04-20 | The Charles Stark Draper Laboratory, Inc. | System and method for characterizing ferromagnetic material |
| CN106015944B (zh) * | 2016-05-03 | 2018-10-26 | 深圳市发利构件机械技术服务有限公司 | 深海海底管道巡检系统及其工作方法 |
| CN110531430A (zh) * | 2019-08-29 | 2019-12-03 | 中国石油天然气集团公司 | 海底管道磁法测量数据的处理方法、装置及电子设备 |
| CN115656445A (zh) * | 2022-11-11 | 2023-01-31 | 江苏省特种设备安全监督检验研究院 | 直埋夹套蒸汽管道典型缺陷检测试验方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2294482C1 (ru) * | 2005-10-18 | 2007-02-27 | Талгат Галимзянович Сабирзянов | Способ контроля и обнаружения дефектов на трубопроводах из ферромагнитных материалов |
| WO2009007670A1 (en) * | 2007-07-11 | 2009-01-15 | Flexlife Limited | Inspection method |
| RU2348857C2 (ru) * | 2004-03-26 | 2009-03-10 | Энертаг | Способ и устройство для определения местоположения дефектов, расположенных внутри погруженной пустой конструкции |
| RU88453U1 (ru) * | 2009-07-30 | 2009-11-10 | Закрытое акционерное общество Научно-Производственный Центр "Молния" | Приборный комплекс для бесконтактной диагностики технического состояния подземных трубопроводов м-1 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA1161115A (en) * | 1980-07-28 | 1984-01-24 | Hartley A. French | Pipeline inspection and maintenance method |
| JPH09127252A (ja) * | 1995-10-26 | 1997-05-16 | Kokusai Denshin Denwa Co Ltd <Kdd> | 海底ケーブル探査システム |
| KR100649620B1 (ko) * | 2005-08-22 | 2006-11-27 | 한국전력공사 | 유인잠수정에 의한 해저케이블 점검시스템 |
| CN100462884C (zh) * | 2006-11-02 | 2009-02-18 | 上海交通大学 | 海底管道内爬行器智能控制器 |
| FR2915555B1 (fr) * | 2007-04-25 | 2009-07-31 | Enertag | Procede permettant d'optimiser la precision de la localisation d'un dispositif circulant dans une structure creuse. |
| RU103616U1 (ru) * | 2010-09-27 | 2011-04-20 | Российская Федерация, от имени которой выступает Министерство промышленности и торговли Российской Федерации (Минпромторг России) | Устройство определения местоположения течи продукта из подводных трубопроводов |
-
2011
- 2011-07-29 NO NO11870499A patent/NO2737242T3/no unknown
- 2011-07-29 RU RU2011152497A patent/RU2635751C2/ru active
- 2011-07-29 EP EP11870499.8A patent/EP2737242B1/en active Active
- 2011-07-29 CN CN201180073536.0A patent/CN104160203B/zh active Active
- 2011-07-29 MY MYPI2014000253A patent/MY167657A/en unknown
- 2011-07-29 CA CA2843394A patent/CA2843394C/en active Active
- 2011-07-29 WO PCT/RU2011/000572 patent/WO2013019136A1/en active Application Filing
- 2011-07-29 BR BR112014002108-2A patent/BR112014002108B1/pt active IP Right Grant
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2348857C2 (ru) * | 2004-03-26 | 2009-03-10 | Энертаг | Способ и устройство для определения местоположения дефектов, расположенных внутри погруженной пустой конструкции |
| RU2294482C1 (ru) * | 2005-10-18 | 2007-02-27 | Талгат Галимзянович Сабирзянов | Способ контроля и обнаружения дефектов на трубопроводах из ферромагнитных материалов |
| WO2009007670A1 (en) * | 2007-07-11 | 2009-01-15 | Flexlife Limited | Inspection method |
| RU88453U1 (ru) * | 2009-07-30 | 2009-11-10 | Закрытое акционерное общество Научно-Производственный Центр "Молния" | Приборный комплекс для бесконтактной диагностики технического состояния подземных трубопроводов м-1 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2721473C1 (ru) * | 2019-05-24 | 2020-05-19 | Федеральное государственное автономное образовательное учреждение высшего образования "Национальный исследовательский Томский государственный университет" (ТГУ, НИ ТГУ) | Робот для диагностики и ремонта трубопроводного транспорта |
Also Published As
| Publication number | Publication date |
|---|---|
| MY167657A (en) | 2018-09-21 |
| BR112014002108B1 (pt) | 2020-12-08 |
| CA2843394C (en) | 2018-08-21 |
| BR112014002108A2 (pt) | 2017-02-21 |
| NO2737242T3 (ru) | 2018-02-03 |
| CA2843394A1 (en) | 2013-02-07 |
| EP2737242A1 (en) | 2014-06-04 |
| EP2737242B1 (en) | 2017-09-06 |
| RU2011152497A (ru) | 2015-09-10 |
| CN104160203B (zh) | 2017-10-10 |
| CN104160203A (zh) | 2014-11-19 |
| EP2737242A4 (en) | 2016-01-27 |
| WO2013019136A1 (en) | 2013-02-07 |
| BR112014002108A8 (pt) | 2020-01-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2635751C2 (ru) | Система и способ для инспектирования подводных трубопроводов | |
| US9581567B2 (en) | System and method for inspecting subsea vertical pipeline | |
| US9964519B2 (en) | Non-destructive system and method for detecting structural defects | |
| US8841901B2 (en) | System and method for inspecting a subsea pipeline | |
| US9176096B2 (en) | Apparatus and method for metallic constructions assessment | |
| CA2826139C (en) | Apparatus for the non-contact metallic constructions assessment | |
| JP5113340B2 (ja) | 超音波走査データを用いて物体を検査する方法およびシステム | |
| US8447532B1 (en) | Metallic constructions integrity assessment and maintenance planning method | |
| US10330641B2 (en) | Metallic constructions monitoring and assessment in unstable zones of the earth's crust | |
| JP2006519369A (ja) | 腐食と表面欠陥を走査するための方法と装置 | |
| US9746444B2 (en) | Autonomous pipeline inspection using magnetic tomography | |
| RU2697008C1 (ru) | Способ внутритрубной диагностики технического состояния трубопровода | |
| Zhang et al. | A review of the integrity management of subsea production systems: Inspection and monitoring methods | |
| RU2526579C2 (ru) | Способ испытания внутритрубного инспекционного прибора на кольцевом трубопроводном полигоне | |
| Beller et al. | Combined quantitative in-line inspection of pipelines for metal loss and cracks | |
| Shitashima et al. | Strategies for detection and monitoring of CO2 leakage in sub-seabed CCS | |
| RU2739279C1 (ru) | Универсальное устройство дефектоскопии для контроля технического состояния стенок гильз | |
| RU2715078C1 (ru) | Способ определения очагов развивающейся подпленочной коррозии газопроводов | |
| Wang et al. | Research on the error correction algorithm for caliper center offset in the offshore pipeline | |
| RU2279651C1 (ru) | Способ увеличения ресурса безопасной эксплуатации металлических конструкций | |
| Hedayati et al. | Expert system development for acoustic analysis in concrete harbor NDT | |
| RU2631514C2 (ru) | Способ оценки повреждений обсадных колонн нефтегазовых скважин | |
| Lagunova et al. | Evaluation of Metal Structures of a Mining Excavator Boom by Non-destructive Testing | |
| Grytten et al. | RISK BASED SUBSEA INSPECTION PLANNING AND INTEGRITY MANAGEMENT BY USE OF FIGS® SENSOR | |
| Dmitrievsky et al. | Monitoring technical state of pipelines in difficult conditions |