RU2631193C2 - Хранение и поиск информации, характерной для конкретного устройства измерения формы - Google Patents
Хранение и поиск информации, характерной для конкретного устройства измерения формы Download PDFInfo
- Publication number
- RU2631193C2 RU2631193C2 RU2013139539A RU2013139539A RU2631193C2 RU 2631193 C2 RU2631193 C2 RU 2631193C2 RU 2013139539 A RU2013139539 A RU 2013139539A RU 2013139539 A RU2013139539 A RU 2013139539A RU 2631193 C2 RU2631193 C2 RU 2631193C2
- Authority
- RU
- Russia
- Prior art keywords
- data
- housing
- calibration
- memory element
- temperature
- Prior art date
Links
- 238000005259 measurement Methods 0.000 title claims abstract description 40
- 230000003287 optical effect Effects 0.000 claims abstract description 41
- 239000000835 fiber Substances 0.000 claims abstract description 38
- 238000000034 method Methods 0.000 claims abstract description 28
- 239000013307 optical fiber Substances 0.000 claims abstract description 11
- 239000006185 dispersion Substances 0.000 claims abstract 3
- 230000001419 dependent effect Effects 0.000 claims description 11
- 230000006870 function Effects 0.000 claims description 11
- 230000004913 activation Effects 0.000 claims 1
- 238000004164 analytical calibration Methods 0.000 abstract 2
- 239000003814 drug Substances 0.000 abstract 1
- 230000000694 effects Effects 0.000 abstract 1
- 239000000126 substance Substances 0.000 abstract 1
- 230000008859 change Effects 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 230000003993 interaction Effects 0.000 description 3
- 238000013152 interventional procedure Methods 0.000 description 3
- 238000002168 optical frequency-domain reflectometry Methods 0.000 description 3
- 230000003595 spectral effect Effects 0.000 description 3
- 230000000007 visual effect Effects 0.000 description 3
- 230000001427 coherent effect Effects 0.000 description 2
- 238000002591 computed tomography Methods 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 239000003550 marker Substances 0.000 description 2
- 239000000523 sample Substances 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 238000001228 spectrum Methods 0.000 description 2
- 238000002679 ablation Methods 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 230000036760 body temperature Effects 0.000 description 1
- 238000009529 body temperature measurement Methods 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000001066 destructive effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000009472 formulation Methods 0.000 description 1
- 210000001035 gastrointestinal tract Anatomy 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000003902 lesion Effects 0.000 description 1
- 210000004072 lung Anatomy 0.000 description 1
- 238000002595 magnetic resonance imaging Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000001579 optical reflectometry Methods 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images


Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/009—Flexible endoscopes with bending or curvature detection of the insertion part
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/065—Determining position of the probe employing exclusively positioning means located on or in the probe, e.g. using position sensors arranged on the probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/16—Measuring arrangements characterised by the use of optical techniques for measuring the deformation in a solid, e.g. optical strain gauge
- G01B11/18—Measuring arrangements characterised by the use of optical techniques for measuring the deformation in a solid, e.g. optical strain gauge using photoelastic elements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B21/00—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant
- G01B21/02—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring length, width, or thickness
- G01B21/04—Measuring arrangements or details thereof, where the measuring technique is not covered by the other groups of this subclass, unspecified or not relevant for measuring length, width, or thickness by measuring coordinates of points
- G01B21/042—Calibration or calibration artifacts
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B9/00—Measuring instruments characterised by the use of optical techniques
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D18/00—Testing or calibrating apparatus or arrangements provided for in groups G01D1/00 - G01D15/00
- G01D18/008—Testing or calibrating apparatus or arrangements provided for in groups G01D1/00 - G01D15/00 with calibration coefficients stored in memory
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/353—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells influencing the transmission properties of an optical fibre
- G01D5/35306—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells influencing the transmission properties of an optical fibre using an interferometer arrangement
- G01D5/35309—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells influencing the transmission properties of an optical fibre using an interferometer arrangement using multiple waves interferometer
- G01D5/35316—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells influencing the transmission properties of an optical fibre using an interferometer arrangement using multiple waves interferometer using a Bragg gratings
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2061—Tracking techniques using shape-sensors, e.g. fiber shape sensors with Bragg gratings
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/02—Details of sensors specially adapted for in-vivo measurements
- A61B2562/0261—Strain gauges
- A61B2562/0266—Optical strain gauges
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/08—Sensors provided with means for identification, e.g. barcodes or memory chips
- A61B2562/085—Sensors provided with means for identification, e.g. barcodes or memory chips combined with means for recording calibration data
Abstract
Изобретения относятся к медицине. Способ калибровки интервенционного медицинского инструмента осуществляют с помощью системы калибровки интервенционного медицинского инструмента. Система содержит связанное с процессором запоминающее устройство и модуль оптических измерений для приема сигнала оптической обратной связи из системы измерения формы, связанной с корпусом медицинского инструмента, чтобы предоставлять возможность определения формы корпуса. Система измерения формы имеет множество оптических волокон. При этом обеспечивают медицинский инструмент для оптического измерения формы. Инструмент содержит корпус, связанную с корпусом систему измерения формы и связанный с корпусом элемент памяти для хранения данных, характерных для конкретного устройства и относящихся к специфичной для волокна калибровке корпуса, включающих калибровочные картины рассеивания для каждого волокна. Данные доступны для считывания из элемента памяти по подсоединяемому к корпусу кабелю. Получают из элемента памяти данные, содержащие калибровочные данные или справочные данные, указывающие на калибровочные данные. Калибруют корпус инструмента с использованием данных, относящихся к калибровке корпуса. Достигается калибровка с использованием калибровочных картин рассеивания для каждого волокна из множества оптических волокон. 3 н. и 12 з.п. ф-лы, 3 ил.
Description
Настоящее изобретение относится к медицинским устройствам и способам и, в частности, к системе и способу калибровки, которые содержат данные, характерные для конкретного устройства, хранящиеся в элементах памяти, относящихся к медицинскому инструменту или встроенных в него.
Оптическое измерение формы (OSS) содержит распределенное измерение деформаций в оптическом волокне с характеристическими картинами рэлеевского рассеяния. Рэлеевское рассеяние имеет место в результате случайных флуктуаций показателя преломления в сердцевине волокна, присущих технологическому процессу изготовления волокна. Упомянутые случайные флуктуации можно также моделировать как брэгговскую решетку со случайными изменениями амплитуды и фазы по длине решетки. Если деформировать оптическое волокно, или изменить его температуру, то характеристическая картина рэлеевского рассеяния изменяется.
Оптическое измерение может быть выполнено сначала без воздействия деформацией/температурой на волокно, чтобы получить опорную картину рассеяния и, затем, еще раз после воздействия деформацией/температурой. Кросс-корреляция спектров рэлеевского рассеяния волокна в деформированном/недеформированном состояниях определяет спектральный сдвиг, обусловленный деформированием. Сдвиг длины волны Δλ или частоты Δν картины обратного рассеяния вследствие изменения ΔT температуры или деформации ε по оси волокна очень сходно с откликом волоконной брэгговской решетки: 
, где температурный коэффициент KT равен сумме коэффициента температурного расширения и термооптического коэффициента. Коэффициент деформации Kε является функцией группового показателя преломления, n, компонентов оптического тензора по деформации, pi,j, и коэффициента Пуассона: 
. Таким образом, изменение температуры или деформация является всего лишь линейным масштабным копированием спектрального сдвига Δλ длины волны.
Оптическая рефлектометрия в частотной области (OFDR), по существу, выполняет частотное кодирование пространственных расположений вдоль волокна, что делает возможным распределенное измерение локальных картин рэлеевского отражения. В процессе OFDR, длина волны или оптическая частота лазера линейно модулируются во времени. Для когерентного детектирования, волну обратного рассеяния смешивают с когерентной опорной волной на детекторе. Приемник принимает модулированный сигнал, образованный переходами от конструктивной к деструктивной интерференции и наоборот, со сканированием, при этом, длины волны. Частота Ω сигнала отмечает положение s на волокне, и амплитуда сигнала пропорциональна локальному коэффициенту обратного рассеяния, и коэффициент суммарного затухания амплитуды при распространении в прямом плюс обратном направлении на расстояние s. Посредством выполнения Фурье-преобразования сигнала приемника с использованием, например, спектроанализатора, данный способ позволяет одновременно восстанавливать волны обратного рассеяния из всех точек вдоль волокна. Таким образом, деформацию на разных участках волокна можно определять измерением спектральных сдвигов характеристической картины рэлеевского рассеяния, с использованием любого числа способов обнаружения сдвигов или согласованием картин (например, блочного согласования с кросс-корреляцией или другой метрикой подобия, вычисления изменения фазы сигнала и т.п.) в сочетании с OFDR.
Устройство измерения формы можно создать с использованием вышеописанной методологии распределенного измерения деформаций, когда, по меньшей мере, два оптических волокна занимают известное пространственное расположение, например, при объединении в многоволоконный световод с возможностью измерения формы. С учетом опорной формы или расположения, вместе с опорными картинами рэлеевского рассеяния (или опорных деформаций), можно реконструировать новые формы с использованием взаимно относительных деформаций волокон при известном/заданном/фиксированном пространственном расположении.
Системы OSS (оптического измерения формы) на основе рэлеевского рассеяния зависят от точного определения информации о картине рассеяния и геометрии волокна (например, шаге спирали) в известных предварительно установленных положениях. Полезной возможностью представляется наличие калибровочных картин рассеяния, характерных для конкретного упомянутого волокна, во время использования устройства.
В соответствии с принципами настоящего изобретения предлагаются медицинские инструмент, система и способ калибровки. Инструмент содержит корпус и систему измерения формы, связанную с корпусом, чтобы предоставлять возможность определения формы корпуса. С корпусом связан элемент памяти, выполненный с возможностью хранения данных, относящихся к калибровке корпуса, при этом, данные доступны для считывания по кабелю, подсоединяемому к корпусу таким образом, что данные допускают калибровку корпуса.
Система для калибровки медицинского инструмента содержит процессор и запоминающее устройство, связанное с процессором. Модуль оптических измерений сконфигурирован с возможностью приема сигнала оптической обратной связи из системы измерения формы, связанной с корпусом медицинского инструмента, чтобы предоставлять возможность определения формы корпуса. Медицинский инструмент содержит элемент памяти, связанный с корпусом и выполненный с возможностью хранения данных, относящихся к калибровке корпуса, при этом, данные доступны для считывания по кабелю, выведенному из корпуса, чтобы обеспечивать оптическую обратную связь с модулем оптических измерений таким образом, что данные допускают калибровку корпуса.
Способ содержит этап обеспечения медицинского инструмента для оптического измерения формы, содержащего корпус, систему измерения формы, связанную с корпусом, чтобы предоставлять возможность определения формы корпуса, и элемент памяти, связанный с корпусом и выполненный с возможностью хранения данных, характерных для конкретного устройства, относящихся к калибровке корпуса, при этом, данные доступны для считывания по кабелю, подсоединяемому к корпусу таким образом, что данные допускают калибровку корпуса. Из элемента памяти выбирают данные, относящиеся к калибровке корпуса, при этом, данные содержат какие-то одни из калибровочных данных или справочных данных, указывающих на калибровочные данные. Калибруют корпус инструмента с использованием данных, относящихся к калибровке корпуса.
Технический результат, обеспечиваемый предложенным изобретением, заключается в обеспечении калибровки во время использования устройства для обеспечения точного определения формы корпуса медицинского инструмента.
Приведенные и другие цели, признаки и преимущества настоящего изобретения будут очевидны из последующего подробного описания наглядных вариантов осуществления настоящего изобретения, которые следует рассматривать в связи с прилагаемыми чертежами.
Настоящее изобретение детально представлено в последующем описании предпочтительных вариантов осуществления со ссылкой на следующие фигуры, на которых:
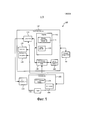
Фиг. 1 - блок-схема/схема последовательности операций системы/способа калибровки инструмента для оптического измерения формы, при этом, инструмент содержит элемент памяти в соответствии с принципами настоящего изобретения;
Фиг. 2 - схема, представляющая инструмент, содержащий элемент памяти для хранения калибровочных данных или обеспечения справочных данных для выбора калибровочных данных, в соответствии с наглядным вариантом осуществления; и
Фиг. 3 - блок-схема/схема последовательности операций системы/способа калибровки инструмента для оптического измерения формы, при этом, инструмент содержит элемент памяти в соответствии с принципами настоящего изобретения.
В настоящем документе предлагается описание волоконно-оптической системы оптического измерения формы (OSS) на основе рэлеевского рассеяния, которая использует точное определение информации о картине рассеяния и геометрии волокна (например, шаге спирали) в предварительно установленном(ных) положении(ниях). Калибровочная(ные) картина(ы) рассеяния характерны для волокна и помогают во время использования устройства. Настоящие варианты осуществления обеспечивают хранение данных, характерных для конкретного волоконно-оптического устройства измерения формы, в элементах памяти, встроенных в устройство (например, в катетер или другой инструмент). В качестве альтернативы, из устройства можно считывать серийные номера или другую информацию, и можно выполнять оперативный поиск данных для выборки необходимых данных. Возможно хранение справочных данных для разных температур. Для правильного выбора набора данных, в устройстве можно использовать температурные датчики.
Следует понимать, что настоящее изобретение поясняется в дальнейшем применительно к медицинским инструментам, однако, принципы настоящего изобретения намного шире и применимы к любым инструментам, применяемым при отслеживании или анализе сложных биологических или механических систем. В частности, принципы настоящего изобретения применимы к процедурам внутреннего отслеживания биологических систем, процедурам во всех зонах тела, например, легких, желудочно-кишечном тракте, выделительных органах, кровеносных сосудах и т.д. Элементы, изображенные на фигурах, могут быть реализованы в различных комбинациях аппаратного и программного обеспечения и обеспечивать функции, которые могут быть объединены в одном элементе или нескольких элементах.
Функции различных элементов, представленные на фигурах, могут быть обеспечены посредством использования специализированного аппаратного обеспечения, а также аппаратного обеспечения, способного исполнять программное обеспечение, совместно с подходящим программным обеспечением. При обеспечении процессором, функции могут обеспечиваться одним специализированным процессором, одним совместно используемым процессором или множеством отдельных процессоров, некоторые из которых могут быть совместно используемыми. Кроме того, явное применение термина «процессор» или «контроллер» нельзя истолковывать в смысле, относящемся исключительно к аппаратному обеспечению, способному исполнять программное обеспечение, и может неявно содержать, без ограничения, аппаратное обеспечение цифрового сигнального процессора («DSP»), постоянную память («ROM») для хранения программного обеспечения, оперативную память («RAM»), энергонезависимое запоминающее устройство и т.п.
Кроме того, предполагается, что все формулировки в настоящей заявке, перечисляющие принципы, аспекты и варианты осуществления настоящего изобретения, а также его характерные примеры, должны охватывать как конструктивные, так и функциональные эквиваленты настоящего изобретения. Кроме того, предполагается, что упомянутые эквиваленты содержат как текущие известные эквиваленты, так и эквиваленты, которые еще будут разработаны (т.е. любые разработанные элементы, которые выполняют такую же функцию, независимо от конструкции). Таким образом, например, специалистам в данной области техники должно быть очевидно, что блок-схемы, представленные в настоящей заявке, являются концептуальными представлениями наглядных компонентов и/или схем системы, осуществляющих принципы настоящего изобретения. Аналогично, следует понимать, что любые блок-схемы последовательностей операций, процессов и т.п. представляют различные процессы, которые могут быть, по существу, представлены на машиночитаемом носителе данных и, поэтому, исполнены компьютером или процессором, независимо от того, показан ли упомянутый компьютер или процессор в явной форме.
Кроме того, варианты осуществления настоящего изобретения могут быть реализованы в форме компьютерного программного продукта, вызываемого с используемого компьютером или машиночитаемого носителя данных, обеспечивающего программный код для использования компьютером или любой системой, исполняющей команды, или в связи с ними. В целях настоящего описания, используемый компьютером или машиночитаемый носитель данных может быть любым устройством, которое может содержать, хранить, передавать, распространять или транспортировать программу для использования системой или устройством, исполняющей(им) команды, или в связи с ними. Носитель может быть электронной, магнитной, оптической, электромагнитной, инфракрасной или полупроводниковой системой (или устройством) или средой распространения. Примеры машиночитаемого носителя данных содержат полупроводниковую или твердотельную память, магнитную ленту, съемную компьютерную дискету, оперативную память (RAM), постоянную память (ROM), жесткий магнитный диск и оптический диск. Существующие в настоящее время примеры оптических дисков содержат компакт-диск, являющийся постоянной памятью (CD-ROM), компакт-диск, являющийся перезаписываемой памятью (CD-R/W) и цифровой видеодиск (DVD).
В дальнейшем, на чертежах, на которых одинаковые числовые позиции обозначают одинаковые или сходные элементы, и, сначала, на фиг.1 изображена с целью пояснения система 100 для выполнения медицинской процедуры. Система 100 может содержать рабочую станцию или пульт 112, с которой(ого) осуществляется контроль и управление процедурой. Рабочая станция 112 предпочтительно содержит, по меньшей мере, один процессор 114 и память 116 для хранения программ и приложений. Память 116 может хранить модуль 115 оптических измерений, выполненный с возможностью интерпретации оптических сигналов обратной связи из устройства 104 измерения формы. Модуль 115 оптических измерений сконфигурирован с возможностью использования обратной связи по оптическим сигналам (и любой другой обратной связи, например, электромагнитной (EM)), для реконструкции деформаций, отклонений и других изменений, относящихся к медицинскому устройству 102 и/или окружающей его области. Медицинское устройство 102 может содержать катетер, проволочный проводник, зонд, эндоскоп, робототехническое устройство или другое активное устройство и т.п.
Рабочая станция 112 может содержать дисплей 118 для наблюдения внутренних изображений объекта, если применяют визуализирующую систему 110. Визуализирующая система 110 может содержать, например, систему магнитно-резонансной томографии (МРТ), рентгеноскопическую систему, систему компьютерной томографии (КТ) и т.п. Дисплей 118 может также допускать взаимодействие пользователя с рабочей станцией 112 и ее компонентами и функциями. Упомянутое взаимодействие дополнительно поддерживается интерфейсом 120, который может содержать клавиатуру, мышь, джойстик или любое другое периферийное устройство или устройство управления, допускающее взаимодействие пользователя с рабочей станцией 112.
Рабочая станция 112 содержит источник 106 оптического излучения для снабжения оптических волокон светом. Для приема света, возвращающегося из всех волокон, служит оптический опрашивающий блок 108. Данный блок позволяет определять деформации или другие параметры, которые будут использованы для интерпретации формы, ориентации и т.п. интервенционного устройства 102. Световые сигналы будут служить обратной связью для выполнения регулировок, оценки ошибок и для калибровки устройства 102 или системы 100.
Устройство 104 измерения формы содержит, по меньшей мере, одно волокно, которое выполнено с возможностью использования своей геометрии для обнаружения и коррекции/калибровки ошибок отслеживания формы.
Оптический опрашивающий модуль 108 работает с модулем 115 оптических измерений (например, программой определения формы), чтобы давать возможность отслеживания инструмента или устройства 102. Оптические волокна устройства 104 измерения формы могут быть прикреплены к инструменту 102 в соответствии с известной или предварительно заданной геометрией, чтобы допускать опрос ошибок отслеживания и калибровку.
Система 104 оптического измерения формы (OSS) обеспечивает рэлеевское рассеяние для точного определения информации о картине рассеяния и геометрии волокна (например, шаге спирали) из известных предварительно установленных положений. Инструмент 102 содержит память 140, которая хранит калибровочные картины рассеяния, которые характерны для волокна и требуются во время использования устройства 102. В одном варианте осуществления, память 140 обеспечивает хранение данных, характерных для конкретного волоконно-оптического устройства измерения формы. Память 140 может содержать микросхему памяти, например, постоянную память, флэш-память или память другого типа. В предпочтительном варианте, память 140 встроена в устройстве 102 (например, в катетере или другом инструменте), но может содержать запоминающее устройство, например, карту памяти, USB флэш-память и т.п., которое содержит данные, характерные для конкретного устройства, и поставляется или упакована вместе с устройством 102. Интерфейс 144 позволяет передавать данные, хранящиеся в памяти 140, в рабочую станцию 112. Интерфейс 144 может также содержать предварительно установленные кнопки или другие переключатели, сконфигурированные с возможностью деблокировки данных, при приведении в действие.
В одном варианте осуществления, вместо хранения всех данных, характерных для конкретного устройства, в памяти 140, в памяти 140 можно хранить справочные данные или идентификационную информацию, например, серийные номера, идентификационные номера, адреса связи или другую информацию, которая занимает ограниченный объем пространства. Справочные данные могут считываться из устройства 102, и для выборки полной версии необходимых данных может выполняться оперативный поиск данных. Справочные данные могут зависеть от, по меньшей мере, одного параметра или условия. Например, условия могут содержать температуру, давление и т.п. Данные для разных температур и т.п. могут храниться в памяти 140 или в таблице преобразования или базе данных 142 и индексированы с использованием справочных данных. Для правильного выбора набора данных, в устройстве можно использовать температурные датчики. Температура может считываться вместе со справочными данными или использоваться для поиска подходящих данных, соответствующих данной температуре, в памяти 140 в устройстве 102.
В одном варианте осуществления, справочные данные можно использовать для установки конфигурации устройства или назначения ограничений или команд в отношении процедуры. Например, волокна для измерения формы системы 104 измерения формы можно активировать в течение ограниченного времени, с учетом серийного номера или калибровочных данных, характерных для конкретного устройства.
Память 140 (или базу данных 142) можно использовать как базу данных для измерения формы с целью поддержки принятия клинических решений (CDS) и сбора статистических данных о формах. Для многих применений, связанных с поддержкой принятия клинических решений (CDS), большое значение может иметь информация, собранная во время интервенционной процедуры. Например, в случае абляционной процедуры, полезно знать формы, которые использовались врачом, и время, которое врач, выполняющий интервенционную процедуру, затрачивал на конкретное поражение/участок. Упомянутая информация может быть собрана и записана в памяти 140 (или в базе данных 142). Кроме того, упомянутая информация можно сохранять в оперативном запоминающем устройстве по сетевому соединению 150 и использовать для аналогичных случаев с использованием различных методов поддержки принятия клинических решений (CDS).
Как показано на фиг.2, медицинский инструмент или устройство 202, например, катетер, зонд или другое устройство снабжено возможностью оптического измерения формы (OSS) (с использованием встроенной системы 204 измерения формы) и содержит встроенную микросхему 206 памяти для хранения данных, характерных для конкретного волокна и необходимых для реконструкции формы. Микросхема 206 памяти может содержать электронно-программируемую постоянную память (EPROM) или запоминающее устройство другого типа. В одном варианте осуществления, медицинский инструмент 202 упакован с картой 205 памяти или другим портативным запоминающим устройством, содержащим релевантную информацию, которую(ое) можно вставлять в устройство 202 для обеспечения считывания в модуль 115 оптических измерений (или блок реконструкции), или карту 205 памяти можно вставлять непосредственно в рабочую станцию 112. Микросхема 206 памяти и карта 206 памяти будут называться элементом 205, 206 памяти и могут быть использованы совместно или по отдельности.
Элемент 205, 206 памяти может служить для сохранения или поиска информации о предыдущих формах устройства 202, в дополнение к набору стандартных опорных форм, потенциально полезных для реконструкции формы. В элемент 205, 206 памяти может быть записано, с использованием рабочей станции 112, приложение, которое включается пользователем, для сохранения конфигурации, или элемент 205, 206 памяти может хранить упомянутое приложение.
Электронный механизм считывания/записи или интерфейс 208 позволяет микросхеме 206 памяти (или карте 205 памяти) выводить сохраненные в ней данные в кабельную систему 210 или может быть включен, чтобы предоставлять возможность сохранения информации (например, текущей конфигурации) в элементе 205, 206 памяти. Кабель или кабельная система 210 выводит релевантные данные в модуль 115 оптических измерений (фиг.1). После того, как данные получены, можно выполнять калибровку для устройства 202.
В одном варианте осуществления, электронное запоминающее устройство содержит справочные данные, например, серийный номер и т.п., и в отношении релевантных калибровочных данных может выдаваться перекрестная ссылка для оперативного поиска (например, по соединению 150 сети Интернет или в базе данных 142, хранящейся в памяти 116 (фиг.1)). В другом варианте осуществления, справочные данные (например, серийный номер) для поиска в базе данных 142 или для оперативного поиска релевантных калибровочных данных с использованием сетевого соединения 150 (фиг.1) могут быть введены непосредственно пользователем на рабочей станции 112.
В другом варианте осуществления, электронный механизм 208 считывания может содержать, по меньшей мере, один предварительно установленный переключатель 220. Предварительно установленные переключатели 220 могут выбираться пользователем в соответствии со стратегией калибровки. Каждый переключатель 220 может обеспечивать считывание разных калибровочных данных для конкретного набора условий. Выбираемые пользователем калибровочные, предварительно установленные переключатели 220 обеспечивают считывание калибровочных данных или справочных данных, выбираемых пользователем, из памяти 206 (или 205) устройства в рабочую станцию 112 (фиг.1).
Элемент 205, 206 памяти может быть сконфигурирован с возможностью хранения и выборки наборов калибровочных данных для нескольких температур или температурных интервалов. В одном варианте осуществления, в устройстве 202 может содержаться встроенный температурный датчик или множество температурных датчиков 222. Датчики 222 можно применять для идентификации правильных наборов калибровочных данных для калибровки с учетом температуры и для обеспечения динамической адаптации в зависимости от температуры. Другие параметры, например, давление, можно контролировать соответствующими датчиками аналогичным образом.
Кроме того, калибровочные данные или справочные данные можно хранить для множества разных сегментов 223, 225 и температуры упомянутых сегментов 223, 225 можно контролировать в отдельности, чтобы при калибровке можно было учитывать разные температуры для разных сегментов. Например, в клинической обстановке, температура в лаборатории может быть, приблизительно, 15 градусов C, а температура тела пациента будет 37 градусов C. В результате, волокно оптического измерения формы (OSS) в устройстве 202 будет иметь проксимальный участок при пониженной температуре и дистальный участок при более высокой температуре. Данное локальное изменение температуры следует учитывать и в данных, хранящихся в элементе 205, 206 памяти. Отдельные температурные датчики 222 на оптическом устройстве 202 могут выполнять температурные измерения, которые можно использовать для правильного выбора набора данных или справочных данных.
Кроме или вместо хранения калибровочных или справочных данных, элемент 205, 206 памяти может хранить другую информацию. В одном примере возможно хранение серийного номера или кода, который можно использовать для кодирования специальной схемы расположения маркеров 224 изображения на кабеле 210 или устройстве 202. Маркер 224 изображения можно использовать при совмещении изображений или другого определения положения на визуальных изображениях объекта (например, пациента). Код маркера может содержаться в информации, которая отыскивается (по серийному номеру) или фактически хранится в элементе 205, 206 памяти.
В другом примере, элемент 205, 206 памяти может хранить кодированную информацию, которая позволяет расширить функции некоторых систем. Число считываемых показаний может изменяться от системы к системе (например, рабочие характеристики будут удовлетворительными/высокими/максимальными, с учетом числа считываемых показаний для данной системы). В одном примере, может храниться число считываемых показаний, необходимых на единицу длины, для данной системы. Данная возможность будет обеспечивать более высокие рабочие характеристики для более совершенных систем, в сравнении с системами с менее высокими рабочими характеристиками.
В другом варианте осуществления, элемент 205, 206 памяти может содержать кодированную информацию, используемую для подбора других устройств или систем, чтобы обеспечивать совместимость или обеспечивать стратегию. Например, если возможны только некоторые варианты интеграции в реальном времени, то, например, устройство 202 может быть пригодно или совместимо при использовании только с конкретным эндоскопом. Элемент 205, 206 памяти может хранить ключ защиты памяти, который дополняет элемент памяти на эндоскопе и хранится в памяти эндоскопа. Ключи, хранящиеся в каждом устройстве, сверяются, например, рабочей станцией и т.п., для определения, можно ли устройства использовать совместно. В настоящем примере, точное соответствие ключей позволяет устройству 202 (например, катетеру) работать в канале эндоскопа.
Инструмент 202 может содержать дополнительный датчик 226 вибраций. Датчик 226 вибраций можно использовать для обнаружения вибраций в инструменте 202, подлежащих считыванию во время работы устройства. Измеренные вибрации используют для определения достоверности данных, доставляемых сигналами оптических волокон. Следует понимать, что разные варианты осуществления, описанные для устройства 202 (устройства 102) в настоящей заявке, можно использовать в любой комбинации.
На фиг.3 представлено наглядное изображение калибровочных системы/способа в соответствии с одним вариантом осуществления. На этапе 302 обеспечивают медицинский инструмент для оптического измерения формы, содержащий корпус, систему измерения формы, связанную с корпусом, чтобы предоставлять возможность определения формы корпуса, и элемент памяти, связанный или с возможностью связи с корпусом и выполненный с возможностью хранения данных, характерных для конкретного устройства, относящихся к калибровке корпуса, при этом, данные доступны для считывания по кабелю, подсоединяемому к корпусу таким образом, что данные допускают калибровку корпуса.
Элемент памяти может содержать микросхему памяти, установленную или встроенную в корпус, или карту памяти, или эквивалентное устройство, которое можно вставлять в корпус или связывать с модулем оптических измерений или рабочей станцией. На этапе 304, элемент памяти может сохранять дополнительную информацию, характерную для конкретного устройства. Например, элемент памяти может сохранять, по меньшей мере, что-то одно из кодирования для указания совместимости с другим устройством, кодирования для указания схемы расположения маркеров изображения, кодирования для указания функций системы, для которой используют инструмент, текущей конфигурации инструмента и т.п.
На этапе 306, из элемента памяти выбирают данные, относящиеся к калибровке корпуса. Данные могут содержать фактические калибровочные данные или справочные данные, указывающие на калибровочные данные. На этапе 307, данные, относящиеся к калибровке корпуса, могут быть индексированы с использованием индекса, зависящего от параметра, чтобы, при заданном значении параметра, например, температуры или давления, из элемента памяти или, при перекрестной ссылке, из внешнего источника памяти выбирались данные, зависящие от параметра. На этапе 308, на или в приборе может быть установлен, по меньшей мере, один датчик параметра (температурный датчик), чтобы измерять параметр для обеспечения данных, зависящих от параметра. Корпус может содержать, по меньшей мере, один сегмент, и датчики можно устанавливать на или в каждом сегменте. На этапе 309, на каждом сегменте измеряют параметр для обеспечения данных, зависящих от параметра, для каждого сегмента.
На этапе 312, корпус инструмента калибруют с использованием данных, относящихся к калибровке корпуса. На этапе 314, калиброванный инструмент используют при проведении процедуры и, в частности, интервенционной процедуры.
При интерпретации прилагаемой формулы изобретения, следует понимать, что:
a) формулировка «содержащий» не исключает присутствия других элементов или этапов, кроме тех, которые перечислены в данном пункте формулы изобретения;
b) указание элемента в единственном числе не исключает присутствия множества упомянутых элементов;
c) номера позиции в формуле изобретения не ограничивают объем притязаний формулы изобретения;
d) несколько «средств» могут быть представлены одним и тем же компонентом или одной и той же аппаратно или программно реализованной конструкцией или функцией; и
e) никакая конкретная последовательность этапов не предполагает ее обязательности, если явно не указано.
Выше приведено описание предпочтительных вариантов осуществления устройств, систем и способов хранения и поиска характерной информации для измерения формы (которые, как предполагается, являются наглядными, но не ограничивающими), однако, следует отметить, что специалистами в данной области техники, на основе изложенных принципов, могут быть созданы модификации и варианты. Поэтому, следует понимать, что в предложенные конкретные варианты осуществления настоящего изобретения могут быть внесены изменения, которые не выходят за пределы объема вариантов осуществления, предложенных в настоящей заявке, в том виде, так как упомянутый объем определяется прилагаемой формулой изобретения. Таким образом, с учетом вышеприведенного описания с пояснением деталей, требуемых, в частности, в соответствии с патентным законодательством, заявленный предмет, на который испрашивается защита патентом на изобретение, изложен в прилагаемой формуле изобретения.
Claims (27)
1. Интервенционный медицинский инструмент, содержащий:
корпус (202);
систему (204) измерения формы, связанную с корпусом, чтобы предоставлять возможность определения формы корпуса медицинского инструмента, причем упомянутая система измерения формы имеет множество оптических волокон;
элемент (206) памяти, связанный с корпусом и выполненный с возможностью хранения данных, ассоциированных с характерной для волокна калибровкой корпуса, включающих калибровочные картины рассеивания для каждого волокна из множества волокон, при этом данные доступны для считывания из элемента памяти по кабелю (210), подсоединяемому к корпусу таким образом, что данные допускают калибровку корпуса.
2. Инструмент по п. 1, в котором элемент памяти содержит, по меньшей мере, одно из микросхемы (206) памяти, установленной в корпусе, и портативного запоминающего устройства (205), вставляемого в корпус.
3. Инструмент по п. 1, в котором данные, хранящиеся в элементе памяти, дополнительно включают в себя по меньшей мере одно из: кодирования для указания совместимости с другим устройством, кодирования для указания схемы расположения маркеров изображения и кодирования для указания функций системы, для которой используют инструмент.
4. Инструмент по п. 1, в котором данные, относящиеся к калибровке корпуса, зависят от параметра, чтобы при заданном значении параметра данные, зависящие от параметра, получали из одного из элемента (205, 206) памяти и, посредством перекрестной ссылки, внешнего источника (116, 150) памяти, при этом параметр является температурой, и данные, зависящие от температуры, выбираются из одного из элемента памяти и, посредством перекрестной ссылки, внешнего источника памяти.
5. Инструмент по п. 4, в котором корпус содержит, по меньшей мере, один сегмент (223, 225) и, по меньшей мере, один температурный датчик (222), выполненный с возможностью обеспечения данных, зависящих от температуры, при этом, по меньшей мере, один температурный датчик (222) содержит, по меньшей мере, один температурный датчик, установленный на или в каждом сегменте и выполненный с возможностью измерения температуры в каждом сегменте для обеспечения данных, зависящих от температуры, для каждого сегмента.
6. Инструмент по п. 1, дополнительно содержащий, по меньшей мере, одно предварительно установленное устройство (220), установленное на или в инструменте, при этом, по меньшей мере, одно предварительно установленное устройство выполнено с возможностью обеспечения, при приведении в действие данных, конкретно относящихся к калибровке для данного предварительно установленного устройства и выбранных из одного из элемента памяти и, посредством перекрестной ссылки, внешнего источника памяти.
7. Система для калибровки интервенционного медицинского инструмента, содержащая:
процессор (114);
запоминающее устройство (116), связанное с процессором;
модуль (115) оптических измерений, выполненный с возможностью приема сигнала оптической обратной связи из системы (104) измерения формы, связанной с корпусом медицинского инструмента (102), чтобы предоставлять возможность определения формы корпуса, причем система измерения формы имеет множество оптических волокон;
при этом медицинский инструмент дополнительно содержит:
корпус (202);
элемент (140) памяти, связанный с корпусом и выполненный с возможностью хранения данных, ассоциированных с характерной для конкретного волокна калибровкой корпуса, включающих калибровочные картины рассеивания для каждого волокна из множества волокон, причем, данные доступны для считывания из элемента памяти по кабелю, выведенному из корпуса, чтобы обеспечивать оптическую обратную связь с модулем оптических измерений таким образом, что данные допускают калибровку корпуса.
8. Система по п. 7, в которой элемент (140) памяти содержит одно из микросхемы (206) памяти, установленной в корпусе, и портативного запоминающего устройства (205), вставляемого в корпус или модуль оптических измерений.
9. Система по п. 7, в которой данные, хранящиеся в элементе памяти, дополнительно включают в себя по меньшей мере одно из: кодирования для указания совместимости с другим устройством, кодирования для указания схемы расположения маркеров изображения и кодирования для указания функций системы, для которой используют инструмент
10. Система по п. 7, в которой данные, относящиеся к калибровке корпуса, зависят от параметра, чтобы при заданном значении параметра выбирались данные, зависящие от параметра, из одного из элемента памяти и, посредством перекрестной ссылки, запоминающего устройства или внешнего источника памяти, при этом параметр является температурой, и данные, зависящие от температуры, выбираются из одного из элемента памяти и, посредством перекрестной ссылки, запоминающего устройства или внешнего источника памяти.
11. Система по п. 10, в которой корпус содержит, по меньшей мере, один сегмент (223, 225) и, по меньшей мере, один температурный датчик (222), выполненный с возможностью обеспечения данных, зависящих от температуры, при этом, по меньшей мере, один температурный датчик содержит, по меньшей мере, один температурный датчик, установленный на или в каждом сегменте и выполненный с возможностью измерения температуры в каждом сегменте для обеспечения данных, зависящих от температуры, для каждого сегмента.
12. Система по п. 7, дополнительно содержащая, по меньшей мере, одно предварительно установленное устройство (220), установленное на или в инструменте, при этом, по меньшей мере, одно предварительно установленное устройство выполнено с возможностью обеспечения, при приведении в действие данных, конкретно относящихся к калибровке при данном предварительно установленном устройстве и выбранных из одного из элемента памяти и, посредством перекрестной ссылки, запоминающего устройства или внешнего источника памяти.
13. Способ калибровки интервенционного медицинского инструмента, содержащий следующие этапы, на которых:
обеспечивают (302) медицинский инструмент для оптического измерения формы, содержащий корпус, систему измерения формы, связанную с корпусом, чтобы предоставлять возможность определения формы корпуса медицинского инструмента, причем система измерения формы имеет множество оптических волокон, и элемент памяти, связанный с корпусом и выполненный с возможностью хранения данных, характерных для конкретного устройства, относящихся к специфичной для волокна калибровке корпуса, включающих калибровочные картины рассеивания для каждого волокна из множества волокон, при этом данные доступны для считывания из элемента памяти по кабелю, подсоединяемому к корпусу таким образом, что данные допускают калибровку корпуса;
получают (306) данные, относящиеся к калибровке корпуса, из элемента памяти, при этом данные содержат одни из калибровочных данных или справочных данных, указывающих на калибровочные данные; и
калибруют (312) корпус инструмента с использованием данных, относящихся к калибровке корпуса.
14. Способ по п. 13, в котором этап получения (306) содержит индексирование (307) данных, относящиеся к калибровке корпуса, с использованием индекса, зависящего от параметра, чтобы при заданном значении параметра получать данные, зависящие от параметра, из одного из элемента памяти и, посредством перекрестной ссылки, из внешнего источника памяти, при этом параметр является температурой, и причем способ дополнительно содержит этап установки (308), по меньшей мере, одного температурного датчика на или в инструменте, чтобы измерять температуру для обеспечения данных, зависящих от температуры.
15. Способ по п. 14, в котором корпус содержит, по меньшей мере, один сегмент, и, по меньшей мере, один температурный датчик содержит, по меньшей мере, один температурный датчик, установленный на или в каждом сегменте, и при этом способ дополнительно содержит этап измерения температуры в каждом сегменте для обеспечения данных, зависящих от температуры, для каждого сегмента.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201161436720P | 2011-01-27 | 2011-01-27 | |
| US61/436,720 | 2011-01-27 | ||
| PCT/IB2012/050273 WO2012101555A1 (en) | 2011-01-27 | 2012-01-20 | Shape sensing device-specific information storage and retrieval |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2013139539A RU2013139539A (ru) | 2015-03-10 |
| RU2631193C2 true RU2631193C2 (ru) | 2017-09-19 |
Family
ID=45607312
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2013139539A RU2631193C2 (ru) | 2011-01-27 | 2012-01-20 | Хранение и поиск информации, характерной для конкретного устройства измерения формы |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US20130325387A1 (ru) |
| EP (1) | EP2667774A1 (ru) |
| JP (1) | JP6195795B2 (ru) |
| CN (1) | CN103327892B (ru) |
| BR (1) | BR112013018983A2 (ru) |
| RU (1) | RU2631193C2 (ru) |
| WO (1) | WO2012101555A1 (ru) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104335139B (zh) * | 2012-05-10 | 2017-07-28 | 皇家飞利浦有限公司 | 手势控制 |
| US9183354B2 (en) | 2012-08-15 | 2015-11-10 | Musc Foundation For Research Development | Systems and methods for image guided surgery |
| WO2014049521A1 (en) * | 2012-09-28 | 2014-04-03 | Koninklijke Philips N.V. | Temperature controlled calibration for optical shape sensing |
| US10825358B2 (en) | 2012-10-01 | 2020-11-03 | Koninklijke Philips N.V. | Clinical decision support and training system using device shape sensing |
| EP2968857B1 (en) * | 2013-03-15 | 2022-05-04 | Intuitive Surgical Operations, Inc. | Shape sensor systems for tracking interventional instruments |
| EP3041409A1 (en) | 2013-09-06 | 2016-07-13 | Koninklijke Philips N.V. | Navigation system |
| WO2015092590A1 (en) * | 2013-12-17 | 2015-06-25 | Koninklijke Philips N.V. | System and method for determining the entry point to the body using optical shape sensing |
| WO2015128145A1 (en) * | 2014-02-27 | 2015-09-03 | Koninklijke Philips N.V. | Registration apparatus for interventional procedure |
| EP3191800B1 (en) * | 2014-09-08 | 2021-08-18 | Koninklijke Philips N.V. | Detection of surface contact with optical shape sensing |
| US10639007B2 (en) | 2014-12-02 | 2020-05-05 | Koninklijke Philips N.V. | Automatic tracking and registration of ultrasound probe using optical shape sensing without tip fixation |
| JP6626844B2 (ja) * | 2015-01-22 | 2019-12-25 | オリンパス株式会社 | ファイバセンサシステム及びそれを搭載した内視鏡装置 |
| JPWO2017221355A1 (ja) * | 2016-06-22 | 2019-02-28 | オリンパス株式会社 | 形状推定装置 |
| CN109974976B (zh) * | 2017-12-28 | 2021-09-21 | 舜宇光学(浙江)研究院有限公司 | 多温度标定系统以及多温度标定方法 |
| WO2022248967A1 (en) * | 2021-05-24 | 2022-12-01 | Ramot At Tel-Aviv University Ltd. | Shape sensing of multimode optical fibers |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003070718A (ja) * | 2001-08-31 | 2003-03-11 | Pentax Corp | 可撓性内視鏡装置 |
| US20070156019A1 (en) * | 2005-12-30 | 2007-07-05 | Larkin David Q | Robotic surgery system including position sensors using fiber bragg gratings |
| US20080002187A1 (en) * | 2006-06-16 | 2008-01-03 | Froggatt Mark E | Distributed strain and temperature discrimination in polarization maintaining fiber |
| WO2008115375A1 (en) * | 2007-03-16 | 2008-09-25 | Luna Innovations Incorporated | Fiber optic position and/or shape sensing based on rayleigh scatter |
| US20090137952A1 (en) * | 2007-08-14 | 2009-05-28 | Ramamurthy Bhaskar S | Robotic instrument systems and methods utilizing optical fiber sensor |
| US20090324161A1 (en) * | 2008-06-30 | 2009-12-31 | Intuitive Surgical, Inc. | Fiber optic shape sensor |
| US20100014071A1 (en) * | 2008-07-17 | 2010-01-21 | Schlumberger Technology Corporation | Frequency-scanned optical time domain reflectometry |
| RU2008146503A (ru) * | 2006-05-26 | 2010-05-27 | Конинклейке Филипс Электроникс Н.В. (Nl) | Улучшенный способ калибровки системы слежения за катетером, использующей медицинские данные отображения |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5563967A (en) * | 1995-06-07 | 1996-10-08 | Mcdonnell Douglas Corporation | Fiber optic sensor having a multicore optical fiber and an associated sensing method |
| GB9713018D0 (en) * | 1997-06-20 | 1997-08-27 | Secr Defence | Optical fibre bend sensor |
| JP2006043449A (ja) * | 2004-07-08 | 2006-02-16 | Pentax Corp | 内視鏡システム |
| US7781724B2 (en) * | 2004-07-16 | 2010-08-24 | Luna Innovations Incorporated | Fiber optic position and shape sensing device and method relating thereto |
| US7772541B2 (en) * | 2004-07-16 | 2010-08-10 | Luna Innnovations Incorporated | Fiber optic position and/or shape sensing based on rayleigh scatter |
| US20060013523A1 (en) * | 2004-07-16 | 2006-01-19 | Luna Innovations Incorporated | Fiber optic position and shape sensing device and method relating thereto |
| US8075498B2 (en) * | 2005-03-04 | 2011-12-13 | Endosense Sa | Medical apparatus system having optical fiber load sensing capability |
| CN1692871A (zh) * | 2005-05-17 | 2005-11-09 | 上海大学 | 软性内窥镜三维曲线形状检测装置和方法 |
| US8989528B2 (en) * | 2006-02-22 | 2015-03-24 | Hansen Medical, Inc. | Optical fiber grating sensors and methods of manufacture |
| JP2008173397A (ja) * | 2007-01-22 | 2008-07-31 | Olympus Corp | 内視鏡システム |
| US7796843B2 (en) * | 2007-03-21 | 2010-09-14 | University Of Houston | Design and performance of a Fiber Bragg grating displacement sensor for measurement of movement |
| US8622935B1 (en) * | 2007-05-25 | 2014-01-07 | Endosense Sa | Elongated surgical manipulator with body position and distal force sensing |
| CN101099657A (zh) * | 2007-07-13 | 2008-01-09 | 上海大学 | 细长柔性杆的空间形状检测装置和方法 |
| US8298227B2 (en) * | 2008-05-14 | 2012-10-30 | Endosense Sa | Temperature compensated strain sensing catheter |
| JP4759654B2 (ja) * | 2008-10-28 | 2011-08-31 | オリンパスメディカルシステムズ株式会社 | 医療機器 |
| US9151811B2 (en) * | 2009-03-04 | 2015-10-06 | Imricor Medical Systems, Inc. | MRI compatible medical device temperature monitoring system |
| US8183520B2 (en) * | 2009-11-13 | 2012-05-22 | Intuitive Surgical Operations, Inc. | Optical fiber shape sensor calibration |
| US8400620B2 (en) * | 2010-06-01 | 2013-03-19 | Luna Innovations Incorporated | Registration of an extended reference for parameter measurement in an optical sensing system |
-
2012
- 2012-01-20 RU RU2013139539A patent/RU2631193C2/ru not_active IP Right Cessation
- 2012-01-20 EP EP12704128.3A patent/EP2667774A1/en not_active Withdrawn
- 2012-01-20 JP JP2013550978A patent/JP6195795B2/ja not_active Expired - Fee Related
- 2012-01-20 BR BR112013018983A patent/BR112013018983A2/pt not_active IP Right Cessation
- 2012-01-20 WO PCT/IB2012/050273 patent/WO2012101555A1/en active Application Filing
- 2012-01-20 US US13/980,056 patent/US20130325387A1/en not_active Abandoned
- 2012-01-20 CN CN201280006442.6A patent/CN103327892B/zh not_active Expired - Fee Related
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003070718A (ja) * | 2001-08-31 | 2003-03-11 | Pentax Corp | 可撓性内視鏡装置 |
| US20070156019A1 (en) * | 2005-12-30 | 2007-07-05 | Larkin David Q | Robotic surgery system including position sensors using fiber bragg gratings |
| RU2008146503A (ru) * | 2006-05-26 | 2010-05-27 | Конинклейке Филипс Электроникс Н.В. (Nl) | Улучшенный способ калибровки системы слежения за катетером, использующей медицинские данные отображения |
| US20080002187A1 (en) * | 2006-06-16 | 2008-01-03 | Froggatt Mark E | Distributed strain and temperature discrimination in polarization maintaining fiber |
| WO2008115375A1 (en) * | 2007-03-16 | 2008-09-25 | Luna Innovations Incorporated | Fiber optic position and/or shape sensing based on rayleigh scatter |
| US20090137952A1 (en) * | 2007-08-14 | 2009-05-28 | Ramamurthy Bhaskar S | Robotic instrument systems and methods utilizing optical fiber sensor |
| US20090324161A1 (en) * | 2008-06-30 | 2009-12-31 | Intuitive Surgical, Inc. | Fiber optic shape sensor |
| US20100014071A1 (en) * | 2008-07-17 | 2010-01-21 | Schlumberger Technology Corporation | Frequency-scanned optical time domain reflectometry |
Also Published As
| Publication number | Publication date |
|---|---|
| BR112013018983A2 (pt) | 2017-11-07 |
| US20130325387A1 (en) | 2013-12-05 |
| EP2667774A1 (en) | 2013-12-04 |
| RU2013139539A (ru) | 2015-03-10 |
| WO2012101555A1 (en) | 2012-08-02 |
| CN103327892B (zh) | 2017-02-15 |
| JP6195795B2 (ja) | 2017-09-13 |
| JP2014508582A (ja) | 2014-04-10 |
| CN103327892A (zh) | 2013-09-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2631193C2 (ru) | Хранение и поиск информации, характерной для конкретного устройства измерения формы | |
| US11642031B2 (en) | Medical device insertion and exit information using distributed fiber optic temperature sensing | |
| US11206999B2 (en) | Flexible instrument channel insert for scope with real-time position tracking | |
| RU2594814C2 (ru) | Интеграция оптоволоконного определения формы в интервенционную среду | |
| US9757034B2 (en) | Flexible tether with integrated sensors for dynamic instrument tracking | |
| US9607381B2 (en) | Accurate and rapid mapping of points from ultrasound images to tracking systems | |
| EP2846691B1 (en) | System and method for stabilizing optical shape sensing | |
| CN104427927A (zh) | 用于血管可视化和监测的由光纤传感器引导的导航 | |
| JP2013542768A5 (ru) | ||
| EP2858553A1 (en) | Distributed sensing device for referencing of physiological features | |
| CN115813552A (zh) | 利用光学形状感测光纤触发 | |
| EP2667773A1 (en) | Templates for optical shape sensing calibration during clinical use | |
| WO2016207163A1 (en) | System and method for registering a structure using fiber-optical realshape data |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20190121 |