RU2474738C2 - Гидравлический демпфер для уменьшения вертикальных и/или горизонтальных колебаний конструкции сооружения или механизма - Google Patents
Гидравлический демпфер для уменьшения вертикальных и/или горизонтальных колебаний конструкции сооружения или механизма Download PDFInfo
- Publication number
- RU2474738C2 RU2474738C2 RU2010117257/11A RU2010117257A RU2474738C2 RU 2474738 C2 RU2474738 C2 RU 2474738C2 RU 2010117257/11 A RU2010117257/11 A RU 2010117257/11A RU 2010117257 A RU2010117257 A RU 2010117257A RU 2474738 C2 RU2474738 C2 RU 2474738C2
- Authority
- RU
- Russia
- Prior art keywords
- hydraulic damper
- air
- liquid
- closed
- vertical
- Prior art date
Links
Images




Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16F—SPRINGS; SHOCK-ABSORBERS; MEANS FOR DAMPING VIBRATION
- F16F7/00—Vibration-dampers; Shock-absorbers
- F16F7/10—Vibration-dampers; Shock-absorbers using inertia effect
- F16F7/1034—Vibration-dampers; Shock-absorbers using inertia effect of movement of a liquid
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Vibration Prevention Devices (AREA)
- Buildings Adapted To Withstand Abnormal External Influences (AREA)
- Combined Devices Of Dampers And Springs (AREA)
- Fluid-Damping Devices (AREA)
Abstract
Изобретение относится к устройствам для гашения колебаний сооружений или механизмов. Демпфер содержит по меньшей мере две частично заполненные жидкостью камеры, которые сообщаются друг с другом на своих нижних концах. По меньшей мере одна камера герметично закрыта на своем верхнем конце таким образом, что над жидкостью сформировано закрытое воздушное пространство. По меньшей мере другая камера на своем верхнем конце по меньшей мере частично открыта. Закрытое воздушное пространство (V0) разделено по меньшей мере на два воздушных отсека (V01-V0n). Один воздушный отсек (V01) находится непосредственно над жидкостью (3), и один или более воздушных отсеков (V02-V0n) соединены с воздушным отсеком (V01), находящимся непосредственно над жидкостью (3), и/или с соответствующим соседним воздушным отсеком (V02-V0n) через отверстия (7). Отверстия (7) выполнены с возможностью закрытия с уплотнением независимо друг от друга с помощью клапанов. Датчик (10) определяет изменение нагрузки и таким образом частоту собственных колебаний конструкции сооружения или механизма. Значения измерения датчика (10) используются блоком (8) управления, чтобы регулировать величину закрытого воздушного пространства (V0) путем открывания и закрывания клапанов. Достигается возможность регулирования величины демпфирования с небольшим расходом энергии с учетом динамически изменяющейся нагрузки. 5 з.п. ф-лы, 10 ил.
Description
Изобретение относится к гидравлическому демпферу для уменьшения вертикальных и/или горизонтальных колебаний конструкции сооружения или механизма с по меньшей мере двумя частично заполненными жидкостью камерами, которые сообщаются друг с другом на своих нижних концах, причем по меньшей мере одна камера герметично закрыта на своем верхнем конце таким образом, что над жидкостью сформировано закрытое воздушное пространство, и по меньшей мере другая камера на своем верхнем конце по меньшей мере частично открыта.
Уровень техники
Применение пружинно-массовых демпферов, подробно описанное в публикации Petersen, C., (2001) Schwingungsdämpfer im Ingenieurbau, Издание 1, издатель: Maurer Söhne GmbH & Co.KG, Мюнхен, ISBN 3-00-008059-7, составляет уровень техники и успешно используется для уменьшения вертикальных колебаний конструкций сооружений и механизмов. Для гашения горизонтальных колебаний используются так называемые маятниковые демпферы. Принцип обоих упомянутых видов демпферов основан на оптимальной установке расчетных параметров (частоты собственных колебаний и затухания) при выбранной частоте собственных колебаний рассчитываемых склонных к колебанию конструкций. Последующее изменение оптимальных расчетных параметров возможно только за счет существенных затрат, например замены пружинных элементов и/или изменения колеблющейся массы.
В качестве альтернативы пружинно-массовым демпферам существуют так называемые гидравлические демпферы, которые состоят из частично заполненной жидкостью системы труб U-образной формы. Первые теоретические исследования гидравлических демпферов для горизонтальных и вертикальных колебаний были выполнены Sun и др. (Sun, L.M., Fujino, Y., Koga, K., (1995). A model of Tuned Liquid Dampers For Suppressing Pitching Motions of Structures. Earthquake Engineering and Structural Dynamics, Том 24, стр.625-636, и Sun, L.M., Nakaoka, Т., et al., (1990). Tuned liquid damper for suppressing vertical vibration. In: Proc. 45th JSCE annual meeting, Том 1, стр.978-979 (на японском)). Широкомасштабное исследование гидравлических демпферов для уменьшения горизонтальных колебаний мостов было выполнено Reiterer и Ziegler (Reiterer, M., Ziegler, F., (2006). Control of Pedestrian-Induced Vibrations of Long Span Bridges. Journal of Structural Control & Health Monitoring. John Wiley & Sons, Ltd. ISSN 1545-2255, Том 13, №6, стр.1003-1027).
Существуют следующие патенты, относящиеся к гидравлическим демпферам:
D1: JP 10220522 A (MITSUBISHI HEAVY IND LTD), 21 августа 1998 г.
D2: AT 201870 B1 (TECHNISCHE UNIVERSITAT WIEN), 15 августа 2007 г.
D3: JP 9151986 A (MITSUBISHI HEAVY IND LTD), 10 июня 1997 г.
D4: JP 5248491 A (MITSUBISHI HEAVY IND LTD), 24 сентября 1993 г.
Публикация D1 описывает устройство для гашения колебаний с баком U-образной формы, который в нижней части заполнен жидкостью, и над жидкостью имеется только одно заполненное газом пространство (с левой или с правой стороны), давление в котором при расходе энергии контролируется впускными/выпускными клапанами.
Публикация D2 описывает гидравлический демпфер с двумя камерами, обе из которых герметично закрыты по отношению к внешней среде, или по меньшей мере одна из которых выполнена симметрично вертикальной оси гидравлического демпфера, предпочтительно симметрично вертикальной оси первой камеры. Данная публикация также раскрывает регулирование желаемой величины демпфирования путем управляемого ввода или вывода газа по меньшей мере в одной из газовых камер, что, впрочем, создает практические трудности с точки зрения расхода энергии на управление и на ввод и вывод газа.
Публикация D3 описывает полностью пассивную систему с расположенной, соответственно, с левой и с правой стороны над поверхностью жидкости воздушной камерой. Далее, из публикации D3 известна камера, в открытом наверх конце которой выполнен выход с переменной величиной просвета.
Публикация D4 также описывает полностью пассивную систему, в которой расположенные над жидкостью камеры плотно закрыты сверху клапаном. Клапаны ведут непосредственно во внешнее пространство и служат, вероятно, для выравнивания давления при изменениях температур.
Задача предложенного изобретения состоит в создании гидравлического демпфера, который позволяет без проблем регулировать величину демпфирования с небольшим расходом энергии в соответствии с ожидаемой нагрузкой конструкции сооружения или механизма.
Данная задача решается за счет того, что в вышеупомянутом гидравлическом демпфере только одна из двух камер герметично закрыта, а вторая камера имеет наверху отверстие для выхода воздуха. Закрытое воздушное пространство разделено по меньшей мере на два воздушных отсека, причем один воздушный отсек находится непосредственно над жидкостью, и один или несколько воздушных отсеков связаны отверстиями с воздушным отсеком, находящимся непосредственно над жидкостью, либо с соответствующим соседним отсеком, причем эти отверстия выполнены с возможностью закрытия с уплотнением независимо друг от друга.
При этом воздушные отсеки герметично закрытой камеры могут быть расположены последовательно друг за другом или параллельно рядом друг с другом и могут быть выполнены в виде трубчатых полостей прямоугольного или круглого сечения.
Путем открытия и закрытия отверстий может изменяться общий объем воздушного отсека, находящегося непосредственно над жидкостью, и сообщающихся с ним воздушных отсеков, и таким образом может изменяться частота собственных колебаний гидравлического демпфера.
В противоположность уровню техники, предложенное изобретение работает без управляемого ввода и вывода газа. Частота демпфера при по существу небольшом расходе энергии устанавливается за счет соответствующим образом выбранной величины общего объема, находящегося над жидкостью (суммы параллельно или последовательно соединенных открытых воздушных камер). Оптимальная величина демпфирования демпфера согласно предложенному изобретению устанавливается путем соответствующего выбора адаптивно изменяемой переменной величины просвета отверстия для выхода воздуха.
В отверстия предпочтительно встроены клапаны, управляемые блоком управления, например микроконтроллером.
Предпочтительно камера с открытым верхним концом имеет выход с переменной величиной просвета, который предпочтительно представляет собой дроссельное устройство, управляемое блоком управления, таким как вышеназванный микроконтроллер. Путем изменения величины просвета может осуществляться регулирование величины демпфирования с учетом нагрузки.
Для усиления эффективности демпфирования предпочтительно использовать жидкости с плотностью ρ=1000 кг/м3. При этом, в частности, предусмотрено использование текучих сред с плотностью ρ=1000-5000 кг/м3 (например, бетонит, ρ = около 2300 кг/м3).
Использование гидравлического демпфера согласно изобретению позволяет рассчитывать частоту собственных колебаний конструкции сооружения и механизма в соответствии с предстоящей нагрузкой, находить оптимальную для этого частоту собственных колебаний гидравлического демпфера и приводить общий объем находящегося непосредственно над жидкостью воздушного отсека и сообщающихся с ним воздушных отсеков в как можно более близкое соответствие с оптимальным объемом, результирующим из оптимальной частоты собственных колебаний, открывая и/или закрывая при этом отверстия между воздушными отсеками, предпочтительно с помощью управляемых блоком управления клапанов.
Далее, оптимальную величину демпфирования рассчитывают согласно предстоящей нагрузке, и устанавливают величину просвета выхода по меньшей мере частично открытой камеры для оптимальной величины демпфирования, предпочтительно с помощью дроссельного устройства, управляемого блоком управления. Данные для регулировки величины просвета выхода для оптимальной величины демпфирования при различных нагрузках могут быть предварительно получены экспериментальным путем для каждого гидравлического демпфера.
В качестве основы для вычисления частоты собственных колебаний и оптимальной величины демпфирования конструкции сооружения или механизма при предстоящей нагрузке с достижением преимущества устанавливают вес создающих нагрузку элементов, в частности с помощью динамических весов.
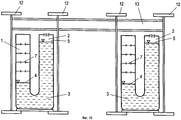
Ниже изобретение будет разъяснено с помощью сопровождающих чертежей, на которых Фиг.1 иллюстрирует гидравлический демпфер для вертикальных колебаний. Фиг.2 - гидравлический демпфер для горизонтальных колебаний, и Фиг.3 - гидравлический демпфер для горизонтальных и вертикальных колебаний, и Фиг.4 и 5 иллюстрируют два возможных варианта выполнения герметично закрытого конца гидравлического демпфера согласно изобретению, а на Фиг.6-9 показаны виды в разрезе возможных вариантов выполнения герметично закрытого конца гидравлического демпфера согласно изобретению, и наконец, на Фиг.10 показан вид в разрезе конструкции моста с установленными на ней гидравлическими демпферами.
Конструкция гидравлического демпфера для гашения горизонтальных и/или вертикальных колебаний отличается управляемой микроконтроллером регулировкой частоты собственных колебаний и величины демпфирования. Гидравлический демпфер состоит из системы труб произвольной формы с поперечным сечением А, частично заполненных жидкостью с плотностью ρ. В описании изобретения раскрыты следующие три вида принципиально различных гидравлических демпферов:
- Вертикальный гидравлический демпфер (Фиг.1)
- Горизонтальный гидравлический демпфер (Фиг.2)
- Комбинированный горизонтальный и вертикальный гидравлический демпфер (Фиг.3)
Вертикальный гидравлический демпфер (Фиг.1)
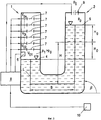
Вертикальный гидравлический демпфер используется предпочтительно для гашения вертикальных колебаний конструкции. Система труб, частично заполненная жидкостью 3, состоит из герметично закрытого участка 1 трубы, причем воздушное пространство объемом V0 над уровнем жидкости разделено на воздушные отсеки с частичными объемами V01 - V0n. В герметично закрытом участке 1 трубы действует избыточное давление p1=р0+2ρgH0, где р0 - атмосферное давление, и 2H0 - величина, на которую уровень 4 жидкости в закрытом участке 1 трубы смещен по отношению к уровню 5 жидкости в открытом участке 2 трубы. Изменение избыточного давления во времени отслеживают с помощью датчика 6 давления. Таким образом возможно выявление статических и динамических колебаний уровня жидкости.
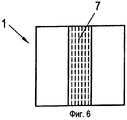
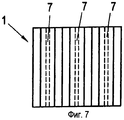
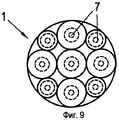
Конфигурация воздушных отсеков возможна как с последовательным (Фиг.4), так и с параллельным соединением (Фиг.5), причем могут быть выполнены трубчатые полости прямоугольного (Фиг.6 и Фиг.7) и круглого (Фиг.8 и Фиг.9) сечения. В случае последовательного соединения камера соединена с ближайшей следующей камерой через открываемый клапан 7. При параллельном соединении камеры установлены рядом друг с другом. Открытием и закрытием камер активно управляет микроконтроллер 8. Число открытых камер и, таким образом, фактический объем V воздуха оптимальным образом устанавливают в зависимости от желаемой частоты собственных колебаний (= первый расчетный параметр) гидравлического демпфера. Зависимость между величиной просвета дросселя и получаемой в результате величиной гидравлического демпфирования для текучих сред экспериментально изучена и представлена в виде таблиц в работе Fried, E., Idelchik, I.E., (1989). Flow Resistance: a Design Guide for Engineers, Hemisphere, Нью-Йорк.
Второй участок 2 трубы вертикального гидравлического демпфера выполнен частично открытым. Здесь уровень 5 жидкости смещен в вертикальном направлении по отношению к закрытому участку 1 трубы на величину 2Н0. Над уровнем 5 жидкости находится воздушный объем, на который действует природное атмосферное давление р0. За счет перемещения столба жидкости воздух может выходить наружу через переменное дроссельное устройство. Фактическая величина просвета дросселя 9 оптимально устанавливается микроконтроллером 8 в зависимости от желаемой величины гидравлического демпфирования (= второй расчетный параметр).
Микроконтроллер 8 вертикального гидравлического демпфера соединен с динамическими весами 10 и/или произвольной системой для определения веса (например, с системой Weigh-in-Motion). В зависимости от различных состояний динамической нагрузки конструкции, которую надлежит демпфировать (ненагруженное, частично нагруженное, полностью нагруженное) с помощью датчика ускорения определяют изменение частоты собственных колебаний и, таким образом, величину дополнительной нагрузки. Систему Weight-In-Motion устанавливают, например, перед мостами, и она позволяет определять величину осевых нагрузок и, таким образом, предварительное вычисление измененной частоты собственных колебаний моста. Определение фактического веса с помощью динамических весов 10 и передача информации в микроконтроллер 8 обеспечивают возможность вычисления оптимальной частоты собственных колебаний и величины демпфирования гидравлического демпфера. Оптимальную величину частоты собственных колебаний и величину демпфирования затем устанавливают путем соответствующего выбора числа открытых воздушных отсеков и величины просвета дроссельного устройства 9.
Линейную частоту собственных колебаний вертикального гидравлического демпфера получают с использованием нестационарного уравнения Бернулли в движущейся системе координат вдоль линии тока относительно несжимаемой жидкости,

где h0=p0/ρg обозначает высоту столба жидкости, эквивалентную атмосферному давлению р0, и 1≤n≤1,4 обозначает экспоненту линеаризованно примененного политропного сжатия газа. Общая длина столба жидкости и угол наклона вертикального участка трубы обозначены L и β. Мнимая высота установленной в герметично закрытом участке трубы пневматической пружины Ha=∑V0i/A является существенным параметром влияния на частоту собственных колебаний вертикального гидравлического демпфера. Активное управление частотой собственных колебаний осуществляется путем приведения в действие оптимального числа последовательно или параллельно соединенных воздушных отсеков через открываемые вентили 7.
Вторым существенным расчетным параметром вертикального гидравлического демпфера является величина гидравлического демпфирования. Она определяется с помощью линеаризованного коэффициента демпфирования Лера ζA. Активное регулирование величины гидравлического демпфирования до оптимального значения осуществляется также с помощью микроконтроллера 8 через дроссельное устройство 9. Величина просвета дросселя, соответствующая линеаризованному коэффициенту демпфирования ζА, может быть заранее экспериментально определена для каждого гидравлического демпфера.
Эффективность вертикального гидравлического демпфера определяется геометрическим фактором κV=2H0 sinβ/L. Наибольшее возможное начальное отклонение Н0 в статическом состоянии покоя, а также β=π/2 при этом является преимуществом. Активная масса вертикального гидравлического демпфера определяется как mA=κVmf, где mf=ρAL.
Горизонтальный гидравлический демпфер (Фиг.2)
Горизонтальный гидравлический демпфер используется предпочтительно для гашения горизонтальных колебаний конструкции. Частично заполненная жидкостью 3 система труб состоит из герметично закрытого участка 1 трубы, причем воздушное пространство объемом V0 над уровнем жидкости разделено на воздушные отсеки с частичными объемами V01-V0n. В статическом состоянии покоя на уровень 11 жидкости с обеих сторон действует природное атмосферное давление р0. Датчик 6 давления, установленный внутри герметично закрытого участка 1 трубы, обеспечивает значение изменения давления с использованием колебаний жидкости. Остальные подробности выполнения горизонтального гидравлического демпфера и управления им аналогичны соответствующим подробностям вертикального гидравлического демпфера.
Линейную частоту собственных колебаний горизонтального гидравлического демпфера получают с использованием нестационарного уравнения Бернулли в движущейся системе координат вдоль линии тока относительно несжимаемой жидкости,

где h0=p0/ρg обозначает высоту столба жидкости, эквивалентную атмосферному давлению р0, и 1≤n≤1,4 обозначает экспоненту линеаризованно примененного политропного сжатия газа.
Общая длина столба жидкости и угол наклона вертикального участка трубы обозначены L и β. Мнимая высота установленной в герметично закрытом участке трубы пневматической пружины Ha=∑V0i/A является существенным параметром влияния на частоту собственных колебаний горизонтального гидравлического демпфера.
Эффективность горизонтального гидравлического демпфера определяется геометрическим фактором κн=(B+2Hcosβ)/L. Наибольшая возможная горизонтальная длина В в статическом состоянии покоя при этом является преимуществом. Активная масса горизонтального гидравлического демпфера определяется как mA=κнmf.
Комбинированный вертикальный и горизонтальный гидравлический демпфер (Фиг.3)
Комбинированный вертикальный и горизонтальный гидравлический демпфер используется для гашения вертикальных и/или горизонтальных колебаний конструкции. Принципиально под ним в данном контексте следует понимать сочетание обоих вышеупомянутых гидравлических демпферов, причем его геометрическую форму выбирают таким образом, чтобы обеспечить возможность наиболее оптимального гашения вертикальных и/или горизонтальных колебаний. Линейная частота собственных колебаний и выполнение данного демпфера являются аналогичными вертикальному гидравлическому демпферу, причем горизонтальный участок трубы является удлиненным. Значительные преимущества данного гидравлического демпфера состоят в следующем:
- При наличии связанных вертикальных и горизонтальных колебаний возможно оптимальное гашение связанных колебаний одним гидравлическим демпфером.
- В зависимости от нагрузки (направления действия силы и частоты возбуждения) могут быть вызваны критические частоты собственных колебаний с соответствующими формами колебаний в вертикальном или горизонтальном направлении. Путем соответствующего выбора числа открытых воздушных отсеков частота колебаний гидравлического демпфера устанавливается оптимальным образом для вертикальных или горизонтальных колебаний.
Эффективность комбинированного вертикального и горизонтального гидравлического демпфера определяется геометрическими факторами κV=2H0 sinβ/L и κн=(B+2Hcosβ)/L. Существует возможность оценки доминирующих колебаний в определенном направлении с более высокой эффективностью.
Оптимальная настройка гидравлического демпфера
Оптимальная настройка гидравлического демпфера осуществляется по аналогии с пружинно-массовым демпфером, как описано Reiterer (Reiterer, M., Ziegler, F., (2006). Control of Pedestrian-Induced Vibrations of Long-Span Bridges. Journal of Structural Control & Health Monitoring. John Wiley & Sons, Ltd. ISSN 1545-2255, Том 13, №6, стр.1003-1027). Оптимальные расчетные параметры для пружинно-массового демпфера были впервые представлены Den Hartog (Den Hartog, J.P., (1936). Mechanische Schwingungen. Verlag von Julius Springer, Berlin), где f* s и M* обозначают линейную частоту собственных колебаний и модальную массу конструкции,

где δ* opt и ζ* A, opt определяют оптимальное соотношение частот и оптимальный коэффициент демпфирования Лера для эквивалентного линейного пружинно-массового демпфера. Для вычисления оптимальных расчетных параметров гидравлического демпфера будет определено следующее эквивалентное массовое соотношение:

Для безразмерного геометрического фактора к используются соответствующие факторы κv или κн. Тогда оптимальные расчетные параметры гидравлического демпфера определяются следующим образом:

Пример применения - стальной мост
В качестве практического примера будет рассмотрен однопролетный стальной мост с открытым поперечным сечением и шириной пролета l=30 м. Продольные балки моста состоят из двутавровых профилей высотой 1,2 м, соединенных между собой поперечными балками. Масса на единицу длины и жесткость на изгиб для моста составляют ρА=2670 кг и EJ=1,1×1010 Н/м2. Далее были исследованы два различных состояния динамической нагрузки, например при проезде поезда:
- Случай 1: дополнительная масса на единицу длины (ρA)ZUS1=700 кг/м
- Случай 2: дополнительная масса на единицу длины (ρA)ZUS2=2100 кг/м
- Случай 3: мост не нагружен
Состояние «мост не нагружен» исследовали с учетом раскачивания моста, например, после проезда поезда или воздействия порывов ветра. Значения модальной (подвижной) массы моста при этом составляли для однопролетной системы MZUS1=ρA+(ρA)ZUS11/2=50550 кг, MZUS2=ρA+(ρA)ZUS21/2=71550 кг, и М=ρA1/2=40050 кг (см. Reiterer, М., (2004). Schwingungsdämpfung von Baukonstruktionen, insbesondere von Brücken. Dissertation, Fakultät für Bauingenieurwesen, Technische Universität Wien, Institut für Allgemeine Mechanik). На основании различных состояний нагрузки получили базовые частоты с доминирующей вертикальной формой колебаний моста (см. также Reiterer, М., (2004)).
- Случай 1: базовая частота вертикальная fS,ZUS1=3,15 Гц
- Случай 2: базовая частота вертикальная fS,ZUS2=2,65 Гц
- Случай 3: базовая частота вертикальная fS=3,54 Гц
Для гашения колебаний моста был установлен вертикальный гидравлический демпфер, причем общая масса жидкости была выбрана mf=800 кг. С помощью одного гидравлического демпфера были уменьшены колебания во всех трех состояниях нагрузки (случаи 1-3). Соотношения массы жидкости и модальной (подвижной) массы моста получились в зависимости от рассматриваемого состояния динамической нагрузки согласно уравнению (4) равными µZUS1=1,6%, µZUS2=1,2% и µ=2,0%. Длина столба жидкости, вертикальная разность высоты уровня жидкости и угол наклона вертикального колена трубы были выбраны равными L=1,5 м, Н0=0,3 м, β=π/2. Размер поперечного сечения системы труб при этом составлял А=0,53 м2. Геометрический фактор вертикального гидравлического демпфера составил κV=0,4 (см. выше).
После установления конфигурации вертикального гидравлического демпфера были рассчитаны оптимальные расчетные параметры гидравлического демпфера путем анализа с использованием уравнений (3), (4) и (5) в зависимости от соответствующего состояния динамической нагрузки,
- Случай 1: fA,opt,ZUS1=3,12 Гц, ζA,opt=3,1%
- Случай 2: fA,opt,ZUS2=2,63 Гц, ζA,opt=2,7%
- Случай 3: fA,opt=3,50 Гц, ζA,opt=3,4%
Мнимая высота пневматической пружины, устанавливаемая для соответствующего состояния нагрузки, при модификации уравнения (1) с n=1, 2 получается:
- Случай 1: Ha,ZUS1=0,23 м
- Случай 2: Ha,ZUS2=0,32 м
- Случай 3: На=0,18 м
Общая высота пневматической пружины в герметично закрытом участке трубы соответственно установлена в максимальное значение 0,32 м, и дальнейшее разделение воздушных камер осуществляется на уровнях 0,23 м и 0,18 м от поверхности уровня жидкости в статическом состоянии покоя. В зависимости от соответствующего состояния динамической нагрузки соответствующая оптимальная частота собственных колебаний гидравлического демпфера может быть установлена путем приведения в действие соответствующего объема воздуха.
Установка оптимальной величины гидравлического демпфирования осуществляется с помощью переменного дроссельного устройства на открытом участке трубы. Требуемая величина просвета устанавливается экспериментальным путем.
Claims (6)
1. Гидравлический демпфер для уменьшения вертикальных и/или горизонтальных колебаний конструкции сооружения или механизма с по меньшей мере двумя частично заполненными жидкостью камерами, которые сообщаются друг с другом на своих нижних концах, причем по меньшей мере одна камера герметично закрыта на своем верхнем конце таким образом, что над жидкостью сформировано закрытое воздушное пространство, и по меньшей мере одна другая камера на своем верхнем конце по меньшей мере частично открыта, отличающийся тем, что закрытое воздушное пространство (V0) разделено по меньшей мере на два воздушных отсека (V01-V0n), причем один воздушный отсек (V01) находится непосредственно над жидкостью (3) и один или более воздушных отсеков (V02-V0n) соединены с воздушным отсеком (V01), находящимся непосредственно над жидкостью (3), и/или с соответствующим соседним воздушным отсеком (V02-V0n) через отверстия (7), причем эти отверстия (7) выполнены с возможностью закрытия с уплотнением независимо друг от друга с помощью клапанов, причем дополнительно предусмотрен управляющий клапанами блок (8) управления и определяющий изменение нагрузки и таким образом частоту собственных колебаний конструкции сооружения или механизма датчик (10), значения измерения которого используются блоком (8) управления, чтобы регулировать величину закрытого воздушного пространства (V0) путем открывания и закрывания клапанов для достижения оптимальной величины демпфирования с учетом динамически изменяющейся нагрузки.
2. Гидравлический демпфер по п.1, отличающийся тем, что воздушные отсеки (V01-V0n) выполнены в виде трубчатых полостей прямоугольного или круглого сечения.
3. Гидравлический демпфер по п.1 или 2, отличающийся тем, что управляемые блоком (8) управления клапаны встроены в отверстия (7).
4. Гидравлический демпфер по п.1, отличающийся тем, что камера (2) с открытым верхним концом имеет выход (9) с переменной величиной просвета.
5. Гидравлический демпфер по п.4, отличающийся тем, что выход (9) с переменной величиной просвета представляет собой дроссельное устройство, управляемое блоком (8) управления.
6. Гидравлический демпфер по п.1, отличающийся тем, что содержащаяся в гидравлическом демпфере жидкость имеет плотность ρ>1000 кг/м3, предпочтительно плотность ρ=1000-5000 кг/м3.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ATA1533/2007 | 2007-09-27 | ||
| AT0153307A AT505862B1 (de) | 2007-09-27 | 2007-09-27 | Flüssigkeitstilger zur reduktion von vertikalen und/oder horizontalen schwingungen an einer bau- oder maschinenkonstruktion |
| PCT/EP2008/008207 WO2009043547A1 (de) | 2007-09-27 | 2008-09-26 | Flüssigkeitstilger zur reduktion von vertikalen und/oder horizontalen schwingungen an einer bau- oder maschinenkonstruktion |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2010117257A RU2010117257A (ru) | 2011-11-10 |
| RU2474738C2 true RU2474738C2 (ru) | 2013-02-10 |
Family
ID=40104704
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2010117257/11A RU2474738C2 (ru) | 2007-09-27 | 2008-09-26 | Гидравлический демпфер для уменьшения вертикальных и/или горизонтальных колебаний конструкции сооружения или механизма |
Country Status (15)
| Country | Link |
|---|---|
| US (1) | US20100200348A1 (ru) |
| EP (1) | EP2193285B1 (ru) |
| JP (1) | JP2010540854A (ru) |
| KR (1) | KR20100090764A (ru) |
| CN (1) | CN101932847B (ru) |
| AT (2) | AT505862B1 (ru) |
| AU (1) | AU2008306161B2 (ru) |
| CA (1) | CA2700298C (ru) |
| ES (1) | ES2386041T3 (ru) |
| HR (1) | HRP20120520T1 (ru) |
| NZ (1) | NZ584143A (ru) |
| PL (1) | PL2193285T3 (ru) |
| RU (1) | RU2474738C2 (ru) |
| SI (1) | SI2193285T1 (ru) |
| WO (1) | WO2009043547A1 (ru) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102013010595A1 (de) * | 2013-06-26 | 2014-12-31 | Rheinisch-Westfälische Technische Hochschule Aachen | Flüssigkeitssäulendämpfungssystem |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102493568A (zh) * | 2011-11-28 | 2012-06-13 | 武汉大学 | 一种环形可调液阻尼器 |
| CN102795073B (zh) * | 2012-05-28 | 2014-08-20 | 江苏大学 | 一种半主动空气悬架动控制系统的设计方法 |
| DE102015000789A1 (de) * | 2015-01-26 | 2016-07-28 | Senvion Gmbh | Schwingungsdämpfer für eine Windenergieanlage, Verfahren zum Einbau eines Schwingungsdämpfers in einen Turm einer Windenergieanlage und Windenergieanlage |
| FR3048409B1 (fr) * | 2016-03-02 | 2018-03-23 | IFP Energies Nouvelles | Systeme de stabilisation, en particulier pour un support flottant, avec au moins trois reserves de liquide reliees entre elles |
| FR3048408B1 (fr) | 2016-03-02 | 2019-04-05 | IFP Energies Nouvelles | Systeme de stabilisation, en particulier pour un support flottant, avec plusieurs dispositifs d'amortissement ayant une forme de u |
| CN106703246A (zh) * | 2016-12-16 | 2017-05-24 | 中铁二十四局集团安徽工程有限公司 | 风力发电塔组合盆式混合调谐阻尼器 |
| US11629518B2 (en) | 2017-02-28 | 2023-04-18 | Hummingbird Kinetics LLC | Tuned liquid damper with a membrane liquid-gas interface |
| CN108488024A (zh) * | 2018-04-23 | 2018-09-04 | 天津大学 | 一种用于振荡水柱阻尼器的发电装置 |
| US11619277B2 (en) * | 2018-05-17 | 2023-04-04 | United States Of America As Represented By The Administrator Of Nasa | Fluid-filled frequency-tunable vibration damper |
| CN111237133B (zh) * | 2020-01-13 | 2021-04-23 | 上海电气风电集团股份有限公司 | 一种可自动调节阻尼属性的风力发电机组塔架 |
| DE102021107849A1 (de) | 2021-03-29 | 2022-09-29 | Rheinisch-Westfälische Technische Hochschule (RWTH) Aachen, Körperschaft des öffentlichen Rechts | Breitband-Flüssigkeitssäulendämpfungssystem und Verfahren zur Abstimmung |
| CN114542658B (zh) * | 2022-03-04 | 2024-03-12 | 西安热工研究院有限公司 | 一种基于循环水泵的核电站减振系统 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1442217A (en) * | 1972-08-24 | 1976-07-14 | Chantiers De Latlantique | Vibration damping device in particular for ships |
| SU540081A1 (ru) * | 1975-01-23 | 1976-12-25 | Иркутский политехнический институт | Двухкаскадное устройство дл гашени вибраций |
| SU1303770A1 (ru) * | 1985-07-19 | 1987-04-15 | А,В.Андрейчиков | Пневматический виброизол тор |
| JPH02278033A (ja) * | 1989-04-18 | 1990-11-14 | Mitsubishi Heavy Ind Ltd | 防振タンク |
| JPH09151986A (ja) * | 1995-11-28 | 1997-06-10 | Mitsubishi Heavy Ind Ltd | U字タンク型動吸振装置 |
| JPH1073144A (ja) * | 1996-08-29 | 1998-03-17 | Mitsubishi Heavy Ind Ltd | 制振タンク |
| JPH10220522A (ja) * | 1997-02-05 | 1998-08-21 | Mitsubishi Heavy Ind Ltd | 鉛直方向振動の制振装置 |
| JP2000018322A (ja) * | 1998-07-01 | 2000-01-18 | Mitsubishi Heavy Ind Ltd | 流体式制振装置 |
| US20040201153A1 (en) * | 2003-04-09 | 2004-10-14 | Yung-Hsiang Chen | Propeller-controlled active tuned-liquid-column damper |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3606851A (en) * | 1969-05-28 | 1971-09-21 | Flame Stabilization Systems In | Stabilizer with upright end tanks |
| US4783937A (en) * | 1986-08-06 | 1988-11-15 | Shimizu Construction Co., Ltd. | Device for suppressing vibration of structure |
| JPH01131768A (ja) * | 1987-11-17 | 1989-05-24 | Shimizu Corp | 構造物の振動抑制装置 |
| AU619889B2 (en) * | 1988-09-08 | 1992-02-06 | Kawasaki Jukogyo Kabushiki Kaisha | Damping device for tower-like structure |
| JPH02309035A (ja) * | 1989-05-24 | 1990-12-25 | Ishikawajima Harima Heavy Ind Co Ltd | 制振装置 |
| JPH0380136U (ru) * | 1989-12-07 | 1991-08-16 | ||
| JP3064088B2 (ja) * | 1992-03-09 | 2000-07-12 | 三菱重工業株式会社 | 制振装置 |
| JPH0712167A (ja) * | 1993-06-24 | 1995-01-17 | Hitachi Ltd | 振動制御装置、洗濯機、コンプレッサ、配管系および空調機 |
| US5560161A (en) * | 1994-07-15 | 1996-10-01 | Lou; Jack Y. K. | Actively tuned liquid damper |
| JPH08326837A (ja) * | 1995-05-29 | 1996-12-10 | Hitachi Ltd | 制振装置および構造物 |
| US7216857B2 (en) * | 2004-10-12 | 2007-05-15 | Toyo Tire & Rubber Co., Ltd. | Hydraulic antivibration device |
-
2007
- 2007-09-27 AT AT0153307A patent/AT505862B1/de not_active IP Right Cessation
-
2008
- 2008-09-26 EP EP08802658A patent/EP2193285B1/de active Active
- 2008-09-26 PL PL08802658T patent/PL2193285T3/pl unknown
- 2008-09-26 US US12/733,827 patent/US20100200348A1/en not_active Abandoned
- 2008-09-26 ES ES08802658T patent/ES2386041T3/es active Active
- 2008-09-26 CA CA2700298A patent/CA2700298C/en not_active Expired - Fee Related
- 2008-09-26 WO PCT/EP2008/008207 patent/WO2009043547A1/de active Application Filing
- 2008-09-26 AU AU2008306161A patent/AU2008306161B2/en not_active Ceased
- 2008-09-26 CN CN2008801089208A patent/CN101932847B/zh not_active Expired - Fee Related
- 2008-09-26 KR KR1020107009251A patent/KR20100090764A/ko not_active Application Discontinuation
- 2008-09-26 RU RU2010117257/11A patent/RU2474738C2/ru active
- 2008-09-26 SI SI200830678T patent/SI2193285T1/sl unknown
- 2008-09-26 AT AT08802658T patent/ATE551553T1/de active
- 2008-09-26 NZ NZ584143A patent/NZ584143A/en unknown
- 2008-09-26 JP JP2010526213A patent/JP2010540854A/ja active Pending
-
2012
- 2012-06-20 HR HRP20120520AT patent/HRP20120520T1/hr unknown
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1442217A (en) * | 1972-08-24 | 1976-07-14 | Chantiers De Latlantique | Vibration damping device in particular for ships |
| SU540081A1 (ru) * | 1975-01-23 | 1976-12-25 | Иркутский политехнический институт | Двухкаскадное устройство дл гашени вибраций |
| SU1303770A1 (ru) * | 1985-07-19 | 1987-04-15 | А,В.Андрейчиков | Пневматический виброизол тор |
| JPH02278033A (ja) * | 1989-04-18 | 1990-11-14 | Mitsubishi Heavy Ind Ltd | 防振タンク |
| JPH09151986A (ja) * | 1995-11-28 | 1997-06-10 | Mitsubishi Heavy Ind Ltd | U字タンク型動吸振装置 |
| JPH1073144A (ja) * | 1996-08-29 | 1998-03-17 | Mitsubishi Heavy Ind Ltd | 制振タンク |
| JPH10220522A (ja) * | 1997-02-05 | 1998-08-21 | Mitsubishi Heavy Ind Ltd | 鉛直方向振動の制振装置 |
| JP2000018322A (ja) * | 1998-07-01 | 2000-01-18 | Mitsubishi Heavy Ind Ltd | 流体式制振装置 |
| US20040201153A1 (en) * | 2003-04-09 | 2004-10-14 | Yung-Hsiang Chen | Propeller-controlled active tuned-liquid-column damper |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102013010595A1 (de) * | 2013-06-26 | 2014-12-31 | Rheinisch-Westfälische Technische Hochschule Aachen | Flüssigkeitssäulendämpfungssystem |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20100090764A (ko) | 2010-08-17 |
| EP2193285B1 (de) | 2012-03-28 |
| ATE551553T1 (de) | 2012-04-15 |
| CN101932847A (zh) | 2010-12-29 |
| EP2193285A1 (de) | 2010-06-09 |
| SI2193285T1 (sl) | 2012-09-28 |
| WO2009043547A1 (de) | 2009-04-09 |
| JP2010540854A (ja) | 2010-12-24 |
| ES2386041T3 (es) | 2012-08-07 |
| RU2010117257A (ru) | 2011-11-10 |
| AT505862A1 (de) | 2009-04-15 |
| NZ584143A (en) | 2011-12-22 |
| HRP20120520T1 (hr) | 2012-08-31 |
| AT505862B1 (de) | 2010-01-15 |
| CA2700298C (en) | 2012-07-10 |
| CA2700298A1 (en) | 2009-04-09 |
| AU2008306161B2 (en) | 2012-02-16 |
| US20100200348A1 (en) | 2010-08-12 |
| PL2193285T3 (pl) | 2013-06-28 |
| AU2008306161A1 (en) | 2009-04-09 |
| CN101932847B (zh) | 2013-07-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2474738C2 (ru) | Гидравлический демпфер для уменьшения вертикальных и/или горизонтальных колебаний конструкции сооружения или механизма | |
| US20190249740A1 (en) | Ultra-low frequency tuned liquid mass damper and design method of the same | |
| RU2462548C2 (ru) | Способ демпфирования колебаний вант и соответствующая система | |
| US20230295945A1 (en) | Tuned liquid damper with a membrane liquid-gas interface | |
| US20200378466A1 (en) | Tower vibration damper | |
| CN108644298B (zh) | 阻尼多重实时调节的调谐液柱阻尼器 | |
| Bhattacharyya et al. | Nonlinear modeling and validation of air spring effects in a sealed tuned liquid column damper for structural control | |
| Li et al. | Theoretical and experimental studies on reduction for multi-modal seismic responses of high-rise structures by tuned liquid dampers | |
| Pastia et al. | Vibration control of a frame structure using semi-active tuned mass damper | |
| US20170074423A1 (en) | Method for suppression of resonant vibrations in subsea pipelines | |
| CN105735511A (zh) | 一种受控结构上竖向流固耦合调谐质量阻尼器及调校方法 | |
| Ziegler | Special design of tuned liquid column-gas dampers for the control of spatial structural vibrations | |
| Ahmadizadeh | On equivalent passive structural control systems for semi‐active control using viscous fluid dampers | |
| Veļičko et al. | Overview of tuned liquid dampers and possible ways of oscillation damping properties improvement | |
| CN115012299A (zh) | 激振装置、激振装置的设计参数确定方法及减振装置 | |
| You et al. | LQG control of along-wind response of a tall building with an ATMD | |
| CN111796611B (zh) | 一种拉索多模态振动的控制方法 | |
| JP2513296B2 (ja) | 可変剛性・可変減衰機構を有する能動型制震システム | |
| JPH09151986A (ja) | U字タンク型動吸振装置 | |
| Weber et al. | Performance of adaptive TMD for tall building damping | |
| JP2004332837A (ja) | 免震制御方法、免震制御装置および免震構造物 | |
| CN220868580U (en) | Damping hollow slab and assembled damping wall | |
| Ferdek | The modelling and analysis of shock absorbers with stroke-dependent damping | |
| JP2007239803A (ja) | 浮体式免震構造 | |
| Longarini et al. | The constructions vibration control by tuned mass dumper |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PC41 | Official registration of the transfer of exclusive right |
Effective date: 20130327 |
|
| PC41 | Official registration of the transfer of exclusive right |
Effective date: 20130527 |