RU2409484C2 - Способ и система для усовершенствования техники вождения поездов и снижения расхода топлива - Google Patents
Способ и система для усовершенствования техники вождения поездов и снижения расхода топлива Download PDFInfo
- Publication number
- RU2409484C2 RU2409484C2 RU2007145430/11A RU2007145430A RU2409484C2 RU 2409484 C2 RU2409484 C2 RU 2409484C2 RU 2007145430/11 A RU2007145430/11 A RU 2007145430/11A RU 2007145430 A RU2007145430 A RU 2007145430A RU 2409484 C2 RU2409484 C2 RU 2409484C2
- Authority
- RU
- Russia
- Prior art keywords
- train
- locomotive
- mass
- rail track
- track
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 37
- 239000000446 fuel Substances 0.000 title claims abstract description 31
- 230000003137 locomotive effect Effects 0.000 claims abstract description 83
- 238000004422 calculation algorithm Methods 0.000 claims abstract description 24
- 230000001133 acceleration Effects 0.000 claims abstract description 18
- 230000008859 change Effects 0.000 claims abstract description 16
- 238000004364 calculation method Methods 0.000 claims description 12
- 238000012876 topography Methods 0.000 claims description 11
- 238000013459 approach Methods 0.000 claims description 7
- 238000004891 communication Methods 0.000 claims description 6
- 238000012937 correction Methods 0.000 claims description 3
- 230000036962 time dependent Effects 0.000 claims description 2
- 238000005259 measurement Methods 0.000 claims 3
- 230000001105 regulatory effect Effects 0.000 claims 2
- 230000001276 controlling effect Effects 0.000 claims 1
- 230000000694 effects Effects 0.000 abstract description 2
- 239000000126 substance Substances 0.000 abstract 1
- 238000002485 combustion reaction Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 5
- 238000004590 computer program Methods 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 230000006870 function Effects 0.000 description 2
- 238000007792 addition Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000012797 qualification Methods 0.000 description 1
- 230000016776 visual perception Effects 0.000 description 1
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/32—Control or regulation of multiple-unit electrically-propelled vehicles
- B60L15/34—Control or regulation of multiple-unit electrically-propelled vehicles with human control of a setting device
- B60L15/36—Control or regulation of multiple-unit electrically-propelled vehicles with human control of a setting device with automatic control superimposed, e.g. to prevent excessive motor current
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61C—LOCOMOTIVES; MOTOR RAILCARS
- B61C17/00—Arrangement or disposition of parts; Details or accessories not otherwise provided for; Use of control gear and control systems
- B61C17/12—Control gear; Arrangements for controlling locomotives from remote points in the train or when operating in multiple units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L15/00—Indicators provided on the vehicle or train for signalling purposes
- B61L15/0058—On-board optimisation of vehicle or vehicle train operation
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B13/00—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion
- G05B13/02—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric
- G05B13/0205—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric not using a model or a simulator of the controlled system
- G05B13/021—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric not using a model or a simulator of the controlled system in which a variable is automatically adjusted to optimise the performance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/26—Rail vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/40—Control modes
- B60L2260/46—Control modes by self learning
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T30/00—Transportation of goods or passengers via railways, e.g. energy recovery or reducing air resistance
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Health & Medical Sciences (AREA)
- Artificial Intelligence (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Evolutionary Computation (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Power Engineering (AREA)
- Train Traffic Observation, Control, And Security (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Automobile Manufacture Line, Endless Track Vehicle, Trailer (AREA)
Abstract
Изобретение относится к способу и системе для усовершенствования техники вождения поездов. Способ включает вычисление массы поезда, определение на борту локомотивного состава текущего местоположения, распознавание участка изменения рельефа рельсового пути до достижения поездом участка изменения рельефа рельсового пути, корректировку параметра регулирования мощности локомотивного состава. Система содержит процессор, устройство определения местоположения, базу данных по профилям путей. Процессор содержит алгоритм вычисления массы поезда и определения величины ускорения и/или величины замедления поезда. Технический результат заключается в снижении расхода топлива. 2 н. и 30 з.п. ф-лы, 4 ил., 1 таб.
Description
Уровень техники
Это изобретение относится к эксплуатации локомотивов и, в частности, к способу и системе для усовершенствования техники вождения поездов и снижения расхода топлива при изменении рельефа местности, по которой проходит рельсовый путь, в автономном режиме.
В зависимости от уровня квалификации и специализации машиниста поезда и даже от его самочувствия в данный день техника вождения железнодорожных поездов у машинистов бывает разной, что, в свою очередь, вызывает различия как по скорости сгорания целевого топлива поезда, так и по силе тяги поезда. Например, у квалифицированного машиниста, закрепленного за определенным участком железной дороги и обладающего острым зрительным восприятием, есть возможность детального изучения железнодорожного пути и, следовательно, своевременной реакции на изменения уклона и кривизны рельсового пути до подхода поезда к этим участкам изменения рельсового пути и снижения скорости (замедления) или повышения скорости (ускорения) поезда в ожидании изменений. Это обеспечивает более плавное ведение поезда, а также сжигание меньшего количества целевого топлива по сравнению с машинистом, не столь знакомым с рельсовым путем.
В настоящее время существуют системы, позволяющие машинистам минимизировать сгорание целевого топлива, однако такие системы обычно требуют регистрации данных по характеристикам вождения для последующей обработки с целью обеспечения определения условий минимизации сгорания целевого топлива. Кроме того, предполагается, что обработка большей частью выполняется такими системами вне поезда и осуществляется для использования во время другого рейса локомотива. Такие системы, как правило, не приспособлены для осуществления обработки данных в режиме реального времени и учета влияния других внешних факторов типа погоды во время движения поезда.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Для этого требуются система, способ и компьютерный программный код, позволяющие оценивать и определять скорость поезда на борту при приближении к участкам изменения рельефа рельсовых путей, а также использовать полученную информацию для коррекции скорости движения поезда с целью усовершенствования техники вождения поездов и повышения кпд топлива. В предпочтительном примере осуществления настоящее изобретение касается самообучающейся и автокорректирующейся системы. В другом предпочтительном примере осуществления для реализации настоящего изобретения, несмотря на самообучаемость системы, может потребоваться диалоговое общение с машинистом. Таким образом, настоящее изобретение раскрывает способ, систему и компьютерный код для управления движением железнодорожного поезда, имеющего локомотивный состав с одним или более железнодорожными локомотивами с целью повышения кпд топлива локомотивного состава. Способ содержит этап вычисления массы поезда, приводимого в движение локомотивным составом, выполняемый на борту локомотивного состава на основе измерения параметров движения поезда в зависимости от параметров регулирования мощности локомотивного состава. Способ дополнительно содержит этап определения текущего местоположения поезда, выполняемый на борту локомотивного состава. Этап распознавания участка изменения рельефа рельсового пути, выполняемый на борту локомотивного состава до достижения поездом участка изменения рельефа рельсового пути, также является частью предлагаемого способа. Способ также включает в себя этап корректировки параметра регулирования мощности локомотивного состава, выполняемый на борту локомотивного состава, для оптимизации расхода топлива локомотивным составом на основе вычисленной массы поезда при приближении поезда к участку изменения рельефа рельсового пути.
Система содержит устройство определения местоположения, базу данных по профилям путей, содержащую данные по рельефу местности и траектории железнодорожного пути, и процессор, содержащий алгоритм для вычисления массы поезда и алгоритм прямой связи для определения, по меньшей мере, одной из величины ускорения или величины замедления указанного поезда на основе вычисленной массы и ожидаемых рельефа местности и траектории железнодорожного пути. На борту локомотивного состава выполняется определение участка изменения рельефа рельсового пути, и для оптимизации расхода топлива локомотивным составом на основе вычисленной массы поезда при приближении поезда к участку изменения рельефа рельсового пути выполняется корректировка параметра регулирования мощности локомотивного состава.
Компьютерный программный код содержит программный модуль для компьютера, выполненный с возможностью вычисления массы поезда, приводимого в движение локомотивным составом, на основе измерения параметров движения поезда в зависимости от параметров регулирования мощности локомотивного состава. Имеется также программный модуль, выполненный с возможностью определения ожидаемого рельефа рельсового пути до достижения поездом участка изменения рельефа рельсового пути. Программный код также имеет программный модуль для вычисления величины ускорения и/или величины замедления указанного поезда для оптимизации расхода топлива на основе вычисленной массы и изменения ожидаемого рельефа рельсового пути.
Технический эффект заключается в создании программного кода, обеспечивающего возможность обработки данных по поезду и использования этой информации для усовершенствования техники вождения поездов и повышения кпд топлива путем коррекции скорости движения поездов до достижения изменений железнодорожного пути.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Признаки и преимущества настоящего изобретения станут очевидными из приводимого ниже подробного описания изобретения и прилагаемых чертежей, на которых:
Фиг.1 - блок-схема локомотива, состоящая из типичных элементов согласно настоящему изобретению;
Фиг.2 - блок-схема типичных этапов реализации настоящего изобретения в общем виде;
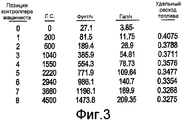
Фиг.3 - таблица типичных значений расхода топлива для локомотива в зависимости от мощности;
Фиг.4 - схема последовательности операций, поясняющая типичные этапы реализации настоящего изобретения; и
Фиг.5 - структурная схема, поясняющая типичные элементы компьютерного программного кода согласно настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Ниже со ссылками на чертежи приводится описание типичных примеров вариантов осуществления изобретения. Перед подробным описанием конкретных системы и способа следует отметить, что настоящее изобретение заключается прежде всего в новой комбинации компонентов системы и этапов реализации способа. В соответствии с этим система и этапы способа представлены на чертежах в виде обычных элементов, отображающих только те специфические детали, которые имеют отношение к настоящему изобретению, чтобы не затруднять понимания предмета изобретения структурными деталями, очевидными для специалистов в данной области техники, преимущественно затрагиваемой в описании. Кроме того, фразеология и терминология, используемые в описании, определяются его назначением и не должны трактоваться в ограничительном смысле. Поэтому термины, использованные в единственном числе, следует рассматривать как включающие в себя этот термин во множественном числе. Это положение должно применяться и в обратном направлении. Например, использование термина "изобретение" следует толковать и как значение термина "изобретения", тогда как использование термина "изобретения" следует также толковать как обозначение термина "изобретение".
По всему тексту описания используется общая ссылка на "локомотив". Настоящее изобретение применимо ко всем типам локомотивов, включая тепловоз, электровоз и гибридные системы, в том числе тепловоз с электрическим приводом, тепловоз с гидравлическим приводом, а также тепловоз с электрическим и гидравлическим приводами, причем оно не ограничено указанными. Такой же общий характер носит и использование термина "параметр регулирования мощности", так как в зависимости от типа локомотива могут быть использованы различные системы привода - механические и гидравлические, а также и другие. Специалистам в данной области техники очевидно, что в зависимости от системы привода и типа локомотива задание скорости локомотива осуществляется в случае разных типов приводов и локомотивов по-разному.
Фиг.1 является типичной иллюстрацией локомотива 5. В железнодорожном поезде один или более локомотивов 5 могут быть частью поезда, причем эти локомотивы считаются составом. Кроме того, на фиг.1 показаны типичные элементы согласно изобретению. На фиг.1 они размещены на одном локомотиве 5, однако возможно размещение этих элементов и в других частях поезда или на других локомотивах в локомотивном составе. Возможно также размещение всех элементов не в одном вагоне или локомотиве 5. Другими словами, элементы могут быть размещены в нескольких частях поезда и соединены один с другим для выполнения своих функций согласно настоящему изобретению.
Кроме того, как показано на фиг.1, поезд снабжен устройством 12 определения местоположения. Это устройство подключено к процессору 14. Имеется также база 16 данных по профилям путей, которая также подключена к процессору 14. База 16 данных по профилям путей включает в себя такую информации, как данные по рельефу местности и траектории железнодорожного пути 17. С процессором 14 соединено запоминающее устройство 26. Запоминающее устройство 26 предназначено для хранения, временного, или в течение более длительных периодов времени, данных, поставляемых и/или вычисляемых процессором 14 для использования в процессе текущей эксплуатации поезда или для использования в процессе последующей эксплуатации. Поезд снабжен также устройствами 30 сбора информации, подключенными к процессору 14. Устройства 30 сбора информации могут быть использованы для определения скорости (требуемой), соответствующей позиции контроллера машиниста, тяговой мощности, зарядного давления тормозной магистрали, скорости, расхода топлива, параметров регулирования мощности, а также величин ускорения и замедления поезда. Собранная информация может быть использована алгоритмами 20, 21, 28, рассматриваемыми ниже, для обеспечения более точного выбора времени разгона поезда или замедления его хода.
Процессор имеет ряд алгоритмов 20, 21, 28, которые обрабатываются процессором 14. Один алгоритм представляет собой алгоритм 20, предназначенный для вычисления массы поезда. Другой алгоритм - алгоритм 21 представляет собой алгоритм прямой связи, который определяет величину ускорения или величину замедления поезда на основе вычисленной массы с учетом ожидаемых рельефа местности и траектории железнодорожного пути. Имеющийся третий алгоритм 28 может быть предназначен для определения точности вычисленного значения массы. Это может быть реализовано путем вычисления второго значения массы поезда и первого вычисленного значения массы на основе второго вычисления. Примеры методов, используемых в алгоритмах, рассмотренных выше, включают в себя разложения в зависящий от времени и изменяющийся во времени ряд Тейлора, но не ограничены указанными. Специалистам в данной области техники также очевидно, что могут быть применены алгоритмы, использующие фильтры Кальмана, так как они поддерживают оценки прошлых, существующих и будущих состояний даже в случае неизвестности точной природы моделируемой системы.
В одном типичном примере осуществления изобретения масса назначается и/или является известной и затем осуществляется этап вычисления с использованием этого третьего алгоритма 28 на основе предварительно полученных данных, хранимых в запоминающем устройстве 26, включающих в себя время и местоположение поезда при прохождении определенного участка железнодорожного пути 17. Второй этап вычисления заключается в сравнении с исходным значением массы и соответствующей коррекции действительной массы, используемой для дальнейших вычислений. В другом типичном примере осуществления время трогания и начальное местоположение поезда сравниваются с данным местоположением, участок которого поезд уже прошел. С учетом этой информации и информации, относящейся к параметру регулирования мощности локомотива 5 в этот период времени, вычисляется масса. Это значение массы сравнивается с исходным значением массы, уже используемым в настоящем изобретении, и значение массы, используемое в настоящем изобретении, соответствующим образом корректируется.
На фиг.2 представлена блок-схема типичных этапов реализации настоящего изобретения в общем виде. Информация 40 по поезду (данные поезда), в частности, по локомотивному составу собирается устройствами 30 сбора информации. Местоположение 42 поезда подлежит определению. Местоположение может быть определено с помощью бортовой системы глобального позиционирования (GPS), счетчика пройденного расстояния, являющегося частью системы управления локомотива, посредством системы слежения и/или других локомотивов в составе, но и не только с помощью указанных. Для распознавания местоположения поезда предусмотрена карта 44 рельсового пути. Карта может содержать такую информацию, как уклоны вверх, уклоны вниз, повороты, деревни/города/населенные пункты (в случае возможности применения определенных ограничений скорости), но не ограничена указанной.
Для вычисления скорости сгорания топлива используется алгоритм или несколько алгоритмов 46. Скорости сгорания топлива вычисляются на основе массы поезда и местоположения поезда. Собранные данные сопоставляются с местоположением поезда. В одном типичном примере осуществления масса поезда вычисляется на основе скорости, соответствующей позиции контроллера машиниста, и времени прохождения поездом данного участка железнодорожного пути. В другом типичном примере осуществления по скорости, соответствующей позиции контроллера машиниста, и изменениям тяговой мощности в зависимости от уклона и сцепления может быть вычислено приблизительное значение массы поезда. В зависимости от рельефа рельсового пути при сборе данных по скорости поезда и тяговой мощности также определяются сцепление в процессе движения и сцепление на поворотах, которые используются при определении массы поезда. В другом примере осуществления с неизвестными параметрами рельсового пути для вычисления массы поезда используются сцепление и силы ветра, а также общее количество израсходованного топлива в режимах движения и изменения результирующей скорости поезда в сочетании с удельным расходом топлива (SFC) на одну лошадиную силу для локомотива. На фиг.3 представлена таблица типичных значений расхода топлива 33 в зависимости от мощности 35 в лошадиных силах и удельного расхода 37 топлива для локомотива 5. Эти значения 31 сопоставлены в этой таблице также со скоростью локомотива, соответствующей позиции контроллера. Результаты вычислений используются для определения ускорения и замедления на основе ожидаемых изменений железнодорожного пути. В предпочтительном варианте во время начального ускорения вычисляется оценочное начальное значение массы, которое используется в качестве начального входного сигнала для оптимизации расхода топлива.
Результаты вычисления передаются в систему 48 управления локомотивом для управления поездом при приближении к определенному участку рельефа местности, по которой проходит рельсовый путь, в автономном режиме. При приближении к такому участку местности поезд может быть на подходе к участку изменения профиля рельсового пути, проходить по этому участку изменения профиля рельсового пути и/или уже проскочить этот участок изменения рельефа рельсового пути. В частности, результаты вычисления сравниваются с действительной целевой характеристикой. В зависимости от результатов вычисления и местоположения поезда или скорости поезд продолжает движение с неизменной скоростью, включается система торможения для замедления поезда или поезд начинает двигаться с ускорением (этап 50).
Для обеспечения дополнительной помощи при определении соответствующей величины ускорения или замедления на борту поезда имеется также устройство 25 сбора погодной информации. Это устройство включает в себя аппаратуру по сбору погодной информации для определения текущих погодных условий, действию которых поезд подвергается в данный момент времени, а также погодных условий на участке рельсового пути, по которому поезд проследует в скором времени. Такие погодные условия включают в себя ветровые режимы, дождь, снег и другие факторы.
В другом предпочтительном примере осуществления изобретения погодные условия передаются на поезд от диспетчера из удаленного пункта типа поездного депо и т.п. В еще одном предпочтительном примере осуществления изобретения погодные условия загружаются через беспроводный интернет. В другом предпочтительном примере осуществления изобретения локальная камера, размещенная на поезде, позволяет получать видеоизображения погодных явлений, а пользователь может затем вводить данные и/или команды, специфические для наблюдаемого типа погоды. Другой предпочтительный пример осуществления изобретения предполагает использование любого числа описанных выше подходов. Данные погодных условий подаются в процессор, в котором алгоритм прямой связи использует эти данные для более точного вычисления величин ускорения или замедления для локомотивного состава.
На фиг.4 представлена схема последовательности операций, поясняющая типичные этапы реализации настоящего изобретения с целью повышения кпд топлива. Как показано на этой фигуре, на этапе 52 должно быть выполнено вычисление массы поезда. Это вычисление может быть выполнено на основе измерения параметров движения поезда в зависимости от параметров регулирования мощности локомотивного состава. На этапе 54 должно быть определено текущее местоположение поезда. Поскольку поезд находится в движении, то на этапе 56 должно быть осуществлено распознавание участка изменения рельефа рельсового пути, выполняемое до достижения поездом участка изменения рельефа рельсового пути. Как было указано выше, такие участки изменения рельефа рельсового пути включают в себя уклоны вверх, уклоны вниз, повороты, деревни/города/населенные пункты, но не ограничены только указанными. На этапе 58 осуществляется коррекция параметра задания мощности локомотивного состава, выполняемая для оптимизации расхода топлива на основе вычисленной массы поезда при приближении поезда к участку изменения рельефа рельсового пути. В предпочтительном примере осуществления изобретения все эти функции выполняются на борту поезда.
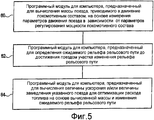
На фиг.5 представлена структурная схема, поясняющая типичные элементы программного кода согласно настоящему изобретению для повышения кпд топлива железнодорожного поезда, имеющего, по меньшей мере, один компьютер на борту локомотива или локомотивного состава. При этом специалистам в данной области техники должно быть очевидно, что необходимость в хранении программных кодов в одном компьютере отсутствует, и различные коды могут быть частью программного обеспечения множества компьютеров, соединенных в сеть, для предоставления доступа к самому конечному результату, которая выступает в роли одного компьютера, хранящего все коды. Кроме того, специалистам в данной области техники очевидно, что, несмотря на то, что представлены три модуля, эти модули могут быть разделены на большее число модулей и/или объединены в меньшее число модулей.
Один программный модуль 60 выполнен с возможностью вычисления массы поезда на основе измерения параметров движения поезда в зависимости от параметров регулирования мощности локомотивного состава. Другой программный модуль 62 определяет ожидаемый рельеф рельсового пути до достижения поездом участка изменения рельефа рельсового пути. Третий программный модуль 64 определяет величины ускорения или замедления для поезда для оптимизации расхода топлива на основе вычисленной массы и изменения ожидаемого рельефа рельсового пути.
Выше приведено описание изобретения на примерах вариантов осуществления изобретения, считающихся в настоящее время предпочтительными, однако специалистам в данной области техники очевидно, что в него могут быть внесены многочисленные изменения и дополнения. В соответствии с этим, предполагается, что изобретение не ограничено конкретным иллюстративным примером варианта его осуществления и должно интерпретироваться в пределах существа и объема, определенных прилагаемой формулой изобретения.
Claims (32)
1. Способ управления движением железнодорожного поезда, имеющего локомотивный состав из одного или более железнодорожных локомотивов, для повышения топливной экономичности локомотивного состава, при котором:
вычисляют массу поезда, приводимого в движение локомотивным составом, на борту локомотивного состава на основе измерения параметров движения поезда в зависимости от параметров регулирования мощности локомотивного состава;
определяют на борту локомотивного состава текущее местоположение поезда;
распознают участок изменения рельефа рельсового пути на борту локомотивного состава до достижения поездом участка измерения рельефа рельсового пути;
и корректируют параметр регулирования мощности локомотивного состава на борту локомотивного состава для оптимизации расхода топлива локомотивным составом на основе вычисленной массы поезда при приближении поезда к участку изменения рельефа рельсового пути.
вычисляют массу поезда, приводимого в движение локомотивным составом, на борту локомотивного состава на основе измерения параметров движения поезда в зависимости от параметров регулирования мощности локомотивного состава;
определяют на борту локомотивного состава текущее местоположение поезда;
распознают участок изменения рельефа рельсового пути на борту локомотивного состава до достижения поездом участка измерения рельефа рельсового пути;
и корректируют параметр регулирования мощности локомотивного состава на борту локомотивного состава для оптимизации расхода топлива локомотивным составом на основе вычисленной массы поезда при приближении поезда к участку изменения рельефа рельсового пути.
2. Способ по п.1, при котором при измерении параметров движения поезда определяют, по меньшей мере, одно из: изменений координат местоположения поезда, скорости поезда и ускорения поезда.
3. Способ по п.1, при котором при распознавании рельефа рельсового пути распознают, по меньшей мере, одно из: уклона рельсового пути, искривления рельсового пути или характеристик сцепления с рельсами.
4. Способ по п.1, при котором вычисление массы поезда осуществляют дополнительно на основе характеристик рельефа рельсового пути, по которому поезд проходит при определении массы.
5. Способ по п.1, при котором параметр регулирования мощности локомотива представляет собой параметр настройки двигателя локомотива.
6. Способ по п.1, при котором локомотив представляет собой, по меньшей мере, одно из тепловоза, электровоза, тепловоза с электрическим приводом, тепловоза с гидравлическим приводом или тепловоза с электрическим и гидравлическим приводами.
7. Способ по п.5, при котором параметр регулирования мощности устанавливают на основе типа привода, используемого в локомотиве.
8. Способ по п.7, при котором используют привод, представляющий собой механический привод и/или гидравлический привод.
9. Способ по п.1, при котором локомотив имеет тяговые электродвигатели для привода колес локомотива, а параметр регулирования мощности локомотива представляет собой параметр регулирования электрической мощности, передаваемой к тяговым электродвигателям.
10. Способ по п.1, при котором для поезда назначают начальную массу поезда, а вычисленную массу поезда используют для повышения точности измерения массы поезда, используемой при коррекции параметра регулирования мощности состава.
11. Способ по п.1, при котором при вычислении массы поезда используют устройство глобального позиционирования для определения, по меньшей мере, одного из координат местоположения поезда, скорости поезда и ускорения поезда.
12. Способ по п.1, при котором дополнительно определяют погодные условия и корректируют параметры регулирования мощности локомотивного состава для оптимизации расхода топлива на основе погодных условий.
13. Способ по п.12, при котором погодные условия содержат, по меньшей мере, одно из окружающих погодных условий и факторов влияния окружающих погодных условий на рельсовый путь.
14. Способ по п.1, при котором дополнительно определяют точность вычисленной массы путем повторного вычисления массы поезда на основе измерения параметров движения поезда в зависимости от параметров регулирования мощности состава локомотивов.
15. Способ по п.14, при котором при определении точности вычисленной массы дополнительно вычисляют вторую массу поезда и сравнивают вторую массу с первой вычисленной массой.
16. Способ по п.15, при котором вычисленную массу корректируют на основе второй массы.
17. Способ по п.12, при котором дополнительно используют множество устройств глобального позиционирования для определения длины поезда, используемой при вычислении массы поезда.
18. Способ по п.1, при котором дополнительно собирают технические данные поезда, используемые при коррекции скорости поезда.
19. Система для повышения топливной экономичности железнодорожного поезда, имеющего локомотивный состав из одного или более железнодорожных локомотивов, размещенная на железнодорожном поезде, содержащая:
устройство определения местоположения;
базу данных по профилям путей, содержащую данные по рельефу местности и траектории железнодорожного пути;
и процессор, содержащий алгоритм для вычисления массы поезда и алгоритм прямой связи для определения величины ускорения и/или величины замедления поезда на основе вычисленной массы и ожидаемых рельефа местности и траектории железнодорожного пути;
причем на борту локомотивного состава выполняется определение участка изменения рельефа рельсового пути, и для оптимизации расхода топлива локомотивным составом на основе вычисленной массы поезда при приближении поезда к участку изменения рельефа рельсового пути выполняется корректировка параметра регулирования мощности локомотивного состава.
устройство определения местоположения;
базу данных по профилям путей, содержащую данные по рельефу местности и траектории железнодорожного пути;
и процессор, содержащий алгоритм для вычисления массы поезда и алгоритм прямой связи для определения величины ускорения и/или величины замедления поезда на основе вычисленной массы и ожидаемых рельефа местности и траектории железнодорожного пути;
причем на борту локомотивного состава выполняется определение участка изменения рельефа рельсового пути, и для оптимизации расхода топлива локомотивным составом на основе вычисленной массы поезда при приближении поезда к участку изменения рельефа рельсового пути выполняется корректировка параметра регулирования мощности локомотивного состава.
20. Система по п.19, в которой алгоритм для вычисления массы поезда содержит, по меньшей мере, одно из комбинации использования времени трогания и начального местоположения поезда, настоящего местоположения поезда и рельефа рельсового пути или комбинации скорости поезда, с которой поезд движется при определенном параметре регулирования мощности.
21. Система по п.19, дополнительно содержащая устройство сбора информации о погоде для определения погодных условий.
22. Система по п.21, в которой алгоритм прямой связи дополнительно содержит операцию разложения погодных условий в ряд для определения величины ускорения и/или величины замедления.
23. Система по п.19, дополнительно содержащая запоминающее устройство, подключенное к процессору.
24. Система по п.22, дополнительно содержащая третий алгоритм для определения точности вычисленного значения массы путем вычисления второй массы поезда на основе предварительно полученных данных, хранимых в запоминающем устройстве, включающих в себя время и местоположение поезда при прохождении поездом участка предварительно пройденного рельсового пути.
25. Система по п.24, в которой третий алгоритм дополнительно содержит операцию определения точности вычисленного значения массы путем вычисления второй массы поезда и сравнения с первой вычисленной массой.
26. Система по п.19, дополнительно содержащая устройства для сбора информации о движении поездов, функционально соединенные с процессором.
27. Система по п.26, в которой данные от устройств сбора используются для определения величины ускорения и/или величины замедления поезда на основе вычисленной массы и ожидаемых рельефа местности и траектории железнодорожного пути.
28. Система по п.19, в которой устройство определения местоположения определяет изменения координат местоположения поезда, и/или скорость поезда, и/или ускорение поезда.
29. Система по п.19, в которой в устройстве определения местоположения имеется устройство глобального позиционирования.
30. Система по п.19, в которой данные по рельефу местности и траектории железнодорожного пути дополнительно содержат данные о уклоне рельсового пути, и/или искривлении рельсового пути, и/или характеристиках сцепления с рельсами.
31. Система по п.19, в которой для поезда назначается начальная масса поезда, а вычисленная масса поезда используется для повышения точности измерения массы поезда, используемой при коррекции параметра регулирования мощности состава.
32. Система по п.19, в которой алгоритм и/или алгоритм прямой связи содержит операцию вычисления путем разложения в зависящий от времени и изменяющийся во времени ряд Тейлора и/или операцию применения фильтра Кальмана.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/148,815 US7522990B2 (en) | 2005-06-08 | 2005-06-08 | System and method for improved train handling and fuel consumption |
| US11/148,815 | 2005-06-08 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2007145430A RU2007145430A (ru) | 2009-06-20 |
| RU2409484C2 true RU2409484C2 (ru) | 2011-01-20 |
Family
ID=36888944
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2007145430/11A RU2409484C2 (ru) | 2005-06-08 | 2006-06-07 | Способ и система для усовершенствования техники вождения поездов и снижения расхода топлива |
Country Status (12)
| Country | Link |
|---|---|
| US (2) | US7522990B2 (ru) |
| EP (1) | EP1893461B1 (ru) |
| JP (1) | JP5033124B2 (ru) |
| CN (1) | CN101208231B (ru) |
| AT (1) | ATE519649T1 (ru) |
| AU (1) | AU2006254989B2 (ru) |
| BR (1) | BRPI0613210A2 (ru) |
| CA (1) | CA2610195C (ru) |
| MX (1) | MX2007015434A (ru) |
| RU (1) | RU2409484C2 (ru) |
| WO (1) | WO2006133306A1 (ru) |
| ZA (1) | ZA200710976B (ru) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2536271C2 (ru) * | 2011-07-20 | 2014-12-20 | Хитачи, Лтд. | Система управления поездом (варианты) |
| WO2015152769A1 (ru) * | 2014-04-04 | 2015-10-08 | Общество с ограниченной ответственностью "Смартвиз" | Способ и система повышения кпд подвижного состава |
| RU2612459C2 (ru) * | 2014-04-04 | 2017-03-09 | Общество с ограниченной ответственностью "Смартвиз", ООО "Смартвиз" | Способ и система повышения кпд подвижного состава |
| RU2623004C1 (ru) * | 2016-03-22 | 2017-06-21 | ООО "Смартвиз" | Способ и устройство повышения эффективности движения железнодорожного транспорта на участке пути |
| EA027967B1 (ru) * | 2014-04-04 | 2017-09-29 | Общество с ограниченной ответственностью "Смартвиз" | Способ и система повышения кпд подвижного состава |
| EA028265B1 (ru) * | 2015-06-04 | 2017-10-31 | Общество с ограниченной ответственностью "Смартвиз" | Способ и система энергооптимального управления железнодорожным подвижным составом, учитывающие возможные аварийные ситуации |
| EA029113B1 (ru) * | 2015-01-30 | 2018-02-28 | Общество с ограниченной ответственностью "Смартвиз" | Способ и система энергооптимального управления автономным железнодорожным подвижным составом |
| RU2667679C1 (ru) * | 2017-07-07 | 2018-09-24 | Общество С Ограниченной Ответственностью "Авп Технология" | Система автоматизированного ведения грузового поезда с регулятором скорости, адаптированным к езде по конкретному профилю пути |
| EA030753B1 (ru) * | 2016-03-11 | 2018-09-28 | Общество с ограниченной ответственностью "Смартвиз" | Способ и система повышения эффективности управления подвижным объектом с учетом массы подвижного объекта в процессе движения подвижного объекта |
Families Citing this family (56)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10338580B2 (en) | 2014-10-22 | 2019-07-02 | Ge Global Sourcing Llc | System and method for determining vehicle orientation in a vehicle consist |
| US9733625B2 (en) | 2006-03-20 | 2017-08-15 | General Electric Company | Trip optimization system and method for a train |
| US8280566B2 (en) * | 2006-04-17 | 2012-10-02 | General Electric Company | Method, system, and computer software code for automated establishment of a distributed power train |
| US20070225878A1 (en) * | 2006-03-20 | 2007-09-27 | Kumar Ajith K | Trip optimization system and method for a train |
| US10464579B2 (en) | 2006-04-17 | 2019-11-05 | Ge Global Sourcing Llc | System and method for automated establishment of a vehicle consist |
| US9233696B2 (en) | 2006-03-20 | 2016-01-12 | General Electric Company | Trip optimizer method, system and computer software code for operating a railroad train to minimize wheel and track wear |
| US10569792B2 (en) | 2006-03-20 | 2020-02-25 | General Electric Company | Vehicle control system and method |
| US10308265B2 (en) | 2006-03-20 | 2019-06-04 | Ge Global Sourcing Llc | Vehicle control system and method |
| US8924049B2 (en) | 2003-01-06 | 2014-12-30 | General Electric Company | System and method for controlling movement of vehicles |
| US9950722B2 (en) | 2003-01-06 | 2018-04-24 | General Electric Company | System and method for vehicle control |
| US7522990B2 (en) * | 2005-06-08 | 2009-04-21 | General Electric Company | System and method for improved train handling and fuel consumption |
| US8249763B2 (en) | 2006-03-20 | 2012-08-21 | General Electric Company | Method and computer software code for uncoupling power control of a distributed powered system from coupled power settings |
| US20080167766A1 (en) * | 2006-03-20 | 2008-07-10 | Saravanan Thiyagarajan | Method and Computer Software Code for Optimizing a Range When an Operating Mode of a Powered System is Encountered During a Mission |
| US8788135B2 (en) | 2006-03-20 | 2014-07-22 | General Electric Company | System, method, and computer software code for providing real time optimization of a mission plan for a powered system |
| US9266542B2 (en) | 2006-03-20 | 2016-02-23 | General Electric Company | System and method for optimized fuel efficiency and emission output of a diesel powered system |
| US9828010B2 (en) * | 2006-03-20 | 2017-11-28 | General Electric Company | System, method and computer software code for determining a mission plan for a powered system using signal aspect information |
| US9689681B2 (en) | 2014-08-12 | 2017-06-27 | General Electric Company | System and method for vehicle operation |
| US8370006B2 (en) | 2006-03-20 | 2013-02-05 | General Electric Company | Method and apparatus for optimizing a train trip using signal information |
| US9527518B2 (en) | 2006-03-20 | 2016-12-27 | General Electric Company | System, method and computer software code for controlling a powered system and operational information used in a mission by the powered system |
| US8370007B2 (en) | 2006-03-20 | 2013-02-05 | General Electric Company | Method and computer software code for determining when to permit a speed control system to control a powered system |
| US9201409B2 (en) | 2006-03-20 | 2015-12-01 | General Electric Company | Fuel management system and method |
| US8768543B2 (en) * | 2006-03-20 | 2014-07-01 | General Electric Company | Method, system and computer software code for trip optimization with train/track database augmentation |
| US8401720B2 (en) | 2006-03-20 | 2013-03-19 | General Electric Company | System, method, and computer software code for detecting a physical defect along a mission route |
| US9156477B2 (en) | 2006-03-20 | 2015-10-13 | General Electric Company | Control system and method for remotely isolating powered units in a vehicle system |
| US8126601B2 (en) | 2006-03-20 | 2012-02-28 | General Electric Company | System and method for predicting a vehicle route using a route network database |
| US8290645B2 (en) | 2006-03-20 | 2012-10-16 | General Electric Company | Method and computer software code for determining a mission plan for a powered system when a desired mission parameter appears unobtainable |
| US8473127B2 (en) | 2006-03-20 | 2013-06-25 | General Electric Company | System, method and computer software code for optimizing train operations considering rail car parameters |
| US7893636B2 (en) * | 2007-10-31 | 2011-02-22 | Progress Rail Services Corp | Mobile machine with one or more electric propulsion motors |
| US8140203B2 (en) * | 2008-04-08 | 2012-03-20 | General Electric Company | Method for controlling vehicle operation incorporating quick clearing function |
| KR20110025988A (ko) * | 2008-09-03 | 2011-03-14 | 미쓰비시덴키 가부시키가이샤 | 전력 공급 제어 시스템 및 전력 공급 제어 방법 |
| DE102008054703A1 (de) * | 2008-12-16 | 2010-06-17 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Ausgeben einer auf eine energieverbrauchsoptimale Beschleunigungsmöglichkeit hinweisenden Fahrinformation in einem Kraftfahrzeug |
| JP2010183687A (ja) * | 2009-02-04 | 2010-08-19 | Hitachi Constr Mach Co Ltd | 電動機駆動トラックの運転支援装置および方法 |
| US9834237B2 (en) | 2012-11-21 | 2017-12-05 | General Electric Company | Route examining system and method |
| US8234023B2 (en) | 2009-06-12 | 2012-07-31 | General Electric Company | System and method for regulating speed, power or position of a powered vehicle |
| US10137542B2 (en) | 2010-01-14 | 2018-11-27 | Senvion Gmbh | Wind turbine rotor blade components and machine for making same |
| DK2752577T3 (da) | 2010-01-14 | 2020-06-08 | Senvion Gmbh | Vindmøllerotorbladkomponenter og fremgangsmåder til fremstilling heraf |
| FR2958759B1 (fr) * | 2010-04-09 | 2012-11-16 | Airbus Operations Sas | Procede et dispositif de recalage de la position d'un aeronef lors d'un vol. |
| KR101173361B1 (ko) * | 2010-05-10 | 2012-08-20 | 엘에스산전 주식회사 | 철도차량 하중 측정장치 및 방법 |
| WO2012049767A1 (ja) * | 2010-10-15 | 2012-04-19 | トヨタ自動車株式会社 | 車両用情報処理システム及び運転支援システム |
| US9360330B2 (en) | 2011-05-23 | 2016-06-07 | Toyota Jidosha Kabushiki Kaisha | Information processing system for vehicle |
| US9897082B2 (en) | 2011-09-15 | 2018-02-20 | General Electric Company | Air compressor prognostic system |
| US8914168B2 (en) | 2012-04-05 | 2014-12-16 | Union Pacific Railroad Company | System and method for automated locomotive startup and shutdown recommendations |
| US20130280095A1 (en) | 2012-04-20 | 2013-10-24 | General Electric Company | Method and system for reciprocating compressor starting |
| US9682716B2 (en) | 2012-11-21 | 2017-06-20 | General Electric Company | Route examining system and method |
| US9669851B2 (en) | 2012-11-21 | 2017-06-06 | General Electric Company | Route examination system and method |
| KR101462625B1 (ko) * | 2013-04-16 | 2014-11-19 | 한국철도기술연구원 | 전기 철도 차량의 에코 드라이빙 장치 및 그 방법 |
| US20140371959A1 (en) * | 2013-06-12 | 2014-12-18 | General Electric Company | System and method for determining effectiveness of a friction modifier along a route segment |
| US10814856B2 (en) * | 2013-06-12 | 2020-10-27 | Ge Global Sourcing Llc | System and method for determining effectiveness of a friction modifier along a route segment |
| CN103879414B (zh) * | 2014-03-26 | 2016-03-30 | 中车信息技术有限公司 | 一种基于自适应A-Star算法的铁路机车优化操纵方法 |
| US10399584B2 (en) | 2014-03-27 | 2019-09-03 | Ge Global Sourcing Llc | System and method integrating an energy management system and yard planner system |
| CN103847749B (zh) * | 2014-03-27 | 2016-03-30 | 中车信息技术有限公司 | 一种双层多目标优化铁路机车操纵序列生成方法 |
| US10705519B2 (en) | 2016-04-25 | 2020-07-07 | Transportation Ip Holdings, Llc | Distributed vehicle system control system and method |
| US10279823B2 (en) * | 2016-08-08 | 2019-05-07 | General Electric Company | System for controlling or monitoring a vehicle system along a route |
| US10532754B2 (en) | 2016-10-31 | 2020-01-14 | Ge Global Sourcing Llc | System for controlling or monitoring a vehicle system along a route |
| CN110134743B (zh) * | 2019-05-20 | 2021-03-16 | 西南交通大学 | 一种成品板外形尺寸的数据库管理系统及方法 |
| CN113126183A (zh) * | 2021-03-05 | 2021-07-16 | 中国气象科学研究院 | 一种基于铁路网的大气三维结构动态信息群观测平台 |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4042810A (en) | 1975-01-25 | 1977-08-16 | Halliburton Company | Method and apparatus for facilitating control of a railway train |
| CA1110742A (en) * | 1977-05-16 | 1981-10-13 | Kansas City Southern Railway Company, Inc. (The) | Fuel saver arrangement for locomotives |
| US4344364A (en) * | 1980-05-09 | 1982-08-17 | Halliburton Company | Apparatus and method for conserving fuel in the operation of a train consist |
| US4602335A (en) * | 1983-08-10 | 1986-07-22 | K.C. Southern Railway Company | Fuel efficient control of multiple unit locomotive consists |
| US4663713A (en) * | 1984-02-21 | 1987-05-05 | J. I. Case Company | Automatic power control for variable power train |
| US4648040A (en) * | 1984-02-21 | 1987-03-03 | J. I. Case Company | Engine monitor/control microprocessor for continuously variable power train |
| US4663714A (en) * | 1984-10-18 | 1987-05-05 | J. I. Case Company | Synchronized mid-mounted clutch for variable power train |
| CA1332975C (en) | 1988-09-28 | 1994-11-08 | Andrew Marsden Long | System for energy conservation on rail vehicles |
| US5825322A (en) * | 1993-05-19 | 1998-10-20 | Alliedsignal Inc. | Method and apparatus for rotating an electronically-scanned radar beam employing a variable-dwell scanning process |
| US5950967A (en) | 1997-08-15 | 1999-09-14 | Westinghouse Air Brake Company | Enhanced distributed power |
| WO1999014093A1 (en) | 1997-09-12 | 1999-03-25 | New York Air Brake Corporation | Method of optimizing train operation and training |
| US6222480B1 (en) * | 1999-03-24 | 2001-04-24 | Alliedsignal | Multifunction aircraft transponder |
| US7164975B2 (en) | 1999-06-15 | 2007-01-16 | Andian Technologies Ltd. | Geometric track and track/vehicle analyzers and methods for controlling railroad systems |
| US6332106B1 (en) * | 1999-09-16 | 2001-12-18 | New York Air Brake Corporation | Train handling techniques and analysis |
| US6434452B1 (en) | 2000-10-31 | 2002-08-13 | General Electric Company | Track database integrity monitor for enhanced railroad safety distributed power |
| US7302895B2 (en) * | 2002-02-28 | 2007-12-04 | General Electric Company | Configurable locomotive |
| US6434462B1 (en) * | 2001-06-28 | 2002-08-13 | Deere & Company | GPS control of a tractor-towed implement |
| US6819996B2 (en) * | 2002-12-30 | 2004-11-16 | Caterpillar Inc | Control system for operating a vehicle within a limited engine speed range |
| US8538611B2 (en) * | 2003-01-06 | 2013-09-17 | General Electric Company | Multi-level railway operations optimization system and method |
| US7047938B2 (en) * | 2004-02-03 | 2006-05-23 | General Electric Company | Diesel engine control system with optimized fuel delivery |
| US7522990B2 (en) * | 2005-06-08 | 2009-04-21 | General Electric Company | System and method for improved train handling and fuel consumption |
-
2005
- 2005-06-08 US US11/148,815 patent/US7522990B2/en not_active Expired - Fee Related
-
2006
- 2006-06-07 CN CN2006800205965A patent/CN101208231B/zh not_active Expired - Fee Related
- 2006-06-07 RU RU2007145430/11A patent/RU2409484C2/ru active
- 2006-06-07 AT AT06784643T patent/ATE519649T1/de not_active IP Right Cessation
- 2006-06-07 AU AU2006254989A patent/AU2006254989B2/en not_active Ceased
- 2006-06-07 WO PCT/US2006/022146 patent/WO2006133306A1/en active Application Filing
- 2006-06-07 JP JP2008515877A patent/JP5033124B2/ja not_active Expired - Fee Related
- 2006-06-07 CA CA2610195A patent/CA2610195C/en not_active Expired - Fee Related
- 2006-06-07 MX MX2007015434A patent/MX2007015434A/es active IP Right Grant
- 2006-06-07 EP EP06784643A patent/EP1893461B1/en not_active Revoked
- 2006-06-07 BR BRPI0613210-3A patent/BRPI0613210A2/pt not_active IP Right Cessation
-
2007
- 2007-12-18 ZA ZA200710976A patent/ZA200710976B/xx unknown
-
2009
- 2009-04-20 US US12/426,414 patent/US7590485B2/en not_active Expired - Fee Related
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2536271C2 (ru) * | 2011-07-20 | 2014-12-20 | Хитачи, Лтд. | Система управления поездом (варианты) |
| WO2015152769A1 (ru) * | 2014-04-04 | 2015-10-08 | Общество с ограниченной ответственностью "Смартвиз" | Способ и система повышения кпд подвижного состава |
| RU2612459C2 (ru) * | 2014-04-04 | 2017-03-09 | Общество с ограниченной ответственностью "Смартвиз", ООО "Смартвиз" | Способ и система повышения кпд подвижного состава |
| EA027967B1 (ru) * | 2014-04-04 | 2017-09-29 | Общество с ограниченной ответственностью "Смартвиз" | Способ и система повышения кпд подвижного состава |
| US10286934B2 (en) | 2014-04-04 | 2019-05-14 | Obschestvo S Ogranichennoy Otvetstvennostyu “Smartwiz” | Method and system for increasing efficiency of rolling stock |
| EA029113B1 (ru) * | 2015-01-30 | 2018-02-28 | Общество с ограниченной ответственностью "Смартвиз" | Способ и система энергооптимального управления автономным железнодорожным подвижным составом |
| EA028265B1 (ru) * | 2015-06-04 | 2017-10-31 | Общество с ограниченной ответственностью "Смартвиз" | Способ и система энергооптимального управления железнодорожным подвижным составом, учитывающие возможные аварийные ситуации |
| EA030753B1 (ru) * | 2016-03-11 | 2018-09-28 | Общество с ограниченной ответственностью "Смартвиз" | Способ и система повышения эффективности управления подвижным объектом с учетом массы подвижного объекта в процессе движения подвижного объекта |
| RU2623004C1 (ru) * | 2016-03-22 | 2017-06-21 | ООО "Смартвиз" | Способ и устройство повышения эффективности движения железнодорожного транспорта на участке пути |
| RU2667679C1 (ru) * | 2017-07-07 | 2018-09-24 | Общество С Ограниченной Ответственностью "Авп Технология" | Система автоматизированного ведения грузового поезда с регулятором скорости, адаптированным к езде по конкретному профилю пути |
Also Published As
| Publication number | Publication date |
|---|---|
| US20090204317A1 (en) | 2009-08-13 |
| JP2008543631A (ja) | 2008-12-04 |
| AU2006254989A1 (en) | 2006-12-14 |
| JP5033124B2 (ja) | 2012-09-26 |
| CA2610195C (en) | 2013-03-12 |
| RU2007145430A (ru) | 2009-06-20 |
| US20060282199A1 (en) | 2006-12-14 |
| MX2007015434A (es) | 2008-02-21 |
| CN101208231A (zh) | 2008-06-25 |
| WO2006133306A1 (en) | 2006-12-14 |
| US7522990B2 (en) | 2009-04-21 |
| US7590485B2 (en) | 2009-09-15 |
| EP1893461A1 (en) | 2008-03-05 |
| EP1893461B1 (en) | 2011-08-10 |
| ZA200710976B (en) | 2008-11-26 |
| AU2006254989B2 (en) | 2012-04-19 |
| ATE519649T1 (de) | 2011-08-15 |
| CN101208231B (zh) | 2012-10-10 |
| BRPI0613210A2 (pt) | 2010-12-28 |
| CA2610195A1 (en) | 2006-12-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2409484C2 (ru) | Способ и система для усовершенствования техники вождения поездов и снижения расхода топлива | |
| RU2764469C1 (ru) | Система формирования корректирующего энергоэффективного трека эксплуатируемого транспортного средства | |
| RU2766900C1 (ru) | Транспортное средство с функцией формирования корректирующего энергоэффективного трека эксплуатируемого транспортного средства | |
| RU2766645C1 (ru) | Транспортное средство с функцией формирования энергоэффективного трека эксплуатируемого транспортного средства при движении эксплуатируемого транспортного средства на участке пути в городской среде | |
| RU2771585C1 (ru) | Система формирования энергоэффективного трека эксплуатируемого транспортного средства при движении эксплуатируемого транспортного средства на участке пути в городской среде | |
| RU2766644C1 (ru) | Устройство формирования энергоэффективного трека эксплуатируемого транспортного средства при движении эксплуатируемого транспортного средства на участке пути в городской среде | |
| JP2004208416A (ja) | 自動列車運転装置 | |
| RU2777853C1 (ru) | Транспортное средство с функцией формирования энергоэффективного трека эксплуатируемого транспортного средства при движении эксплуатируемого транспортного средства по участку пути, включающему точку обязательной остановки | |
| RU2777852C1 (ru) | Способ формирования энергоэффективного трека эксплуатируемого транспортного средства при движении эксплуатируемого транспортного средства по участку пути, включающему точку обязательной остановки | |
| RU2789646C2 (ru) | Устройство формирования корректирующего энергоэффективного трека эксплуатируемого транспортного средства | |
| RU2771586C1 (ru) | Транспортное средство с функцией формирования корректирующего энергоэффективного трека эксплуатируемого транспортного средства | |
| RU2765268C1 (ru) | Устройство формирования энергоэффективного трека эксплуатируемого транспортного средства при движении эксплуатируемого транспортного средства по автомагистрали | |
| RU2777858C1 (ru) | Транспортное средство с функцией формирования модифицированного энергоэффективного трека эксплуатируемого транспортного средства | |
| RU2777855C1 (ru) | Транспортное средство с функцией формирования энергоэффективного навигационного маршрута эксплуатируемого транспортного средства | |
| RU2777862C1 (ru) | Система формирования энергоэффективного навигационного маршрута эксплуатируемого транспортного средства | |
| RU2777857C1 (ru) | Устройство формирования модифицированного энергоэффективного трека эксплуатируемого транспортного средства | |
| RU2777854C1 (ru) | Устройство формирования энергоэффективного навигационного маршрута эксплуатируемого транспортного средства | |
| RU2782969C1 (ru) | Устройство формирования энергоэффективного трека эксплуатируемого транспортного средства при движении эксплуатируемого транспортного средства по участку пути, включающему точку обязательной остановки | |
| RU2782970C1 (ru) | Система формирования энергоэффективного трека эксплуатируемого транспортного средства при движении эксплуатируемого транспортного средства по участку пути, включающему точку обязательной остановки | |
| RU2777860C1 (ru) | Способ формирования модифицированного энергоэффективного трека эксплуатируемого транспортного средства и машиночитаемый носитель данных | |
| RU2766649C1 (ru) | Система формирования корректирующего энергоэффективного трека эксплуатируемого транспортного средства | |
| RU2766650C1 (ru) | Устройство формирования корректирующего энергоэффективного трека эксплуатируемого транспортного средства | |
| RU2766897C1 (ru) | Транспортное средство с функцией формирования энергоэффективного трека эксплуатируемого транспортного средства при движении эксплуатируемого транспортного средства по участку пути, включающему точку обязательной децелерации | |
| RU2765659C1 (ru) | Устройство формирования энергоэффективного трека эксплуатируемого транспортного средства при движении эксплуатируемого транспортного средства по участку пути, включающему точку обязательной децелерации | |
| RU2766896C1 (ru) | Система формирования энергоэффективного трека эксплуатируемого транспортного средства при движении эксплуатируемого транспортного средства по участку пути, включающему точку обязательной децелерации |