JP2004208416A - 自動列車運転装置 - Google Patents
自動列車運転装置 Download PDFInfo
- Publication number
- JP2004208416A JP2004208416A JP2002374958A JP2002374958A JP2004208416A JP 2004208416 A JP2004208416 A JP 2004208416A JP 2002374958 A JP2002374958 A JP 2002374958A JP 2002374958 A JP2002374958 A JP 2002374958A JP 2004208416 A JP2004208416 A JP 2004208416A
- Authority
- JP
- Japan
- Prior art keywords
- stop position
- target stop
- data
- target
- speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Landscapes
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
【課題】列車を目標停止位置で自動停止させる制御の精度を向上させる。
【解決手段】列車1を自動運転し、目標停止位置に精度良く停止させる。この目標停止位置停止制御では、目標停止位置手前n[m]から動作し、目標停止位置停止制御機能動作開始時からの経過時間と、速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御開始位置および目標停止位置のデータとを用いて、目標停止位置停止制御部にて目標停止位置に停止するための制御指令(ブレーキノッチ)を演算し、この制御指令に基づいて停止制御する。
【選択図】 図2
【解決手段】列車1を自動運転し、目標停止位置に精度良く停止させる。この目標停止位置停止制御では、目標停止位置手前n[m]から動作し、目標停止位置停止制御機能動作開始時からの経過時間と、速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御開始位置および目標停止位置のデータとを用いて、目標停止位置停止制御部にて目標停止位置に停止するための制御指令(ブレーキノッチ)を演算し、この制御指令に基づいて停止制御する。
【選択図】 図2
Description
【0001】
【発明の属する技術分野】
本発明は、列車の速度計測値および速度計測周期を利用し、列車を目標停止位置に自動停止させる自動列車運転装置に関する。
【0002】
【従来の技術】
自動列車運転装置(Automatic Train Operation:以下、「ATO」とする。)は、制限速度ないしは制限速度からある程度の余裕を持たせた速度に列車を追従させようとするものとしてすでに実用化されている。しかしながら、PI制御等の誤差追従制御を主体としているため、列車や路線の特性に依存するところが多く、現状では、各列車や各路線に対し、特性またはパラメータ調整を行うためにかなりの時間および労力を必要としている。
【0003】
また、走行計画を作成し、これをもとにした列車走行を行うような自動列車運転装置も考えられている。この場合、走行計画を作成する場合に、簡易的な列車走行モデルを利用する場合がある。最も簡単なものとしては、まず対象の列車を次に示す式のような簡単な物理式にて表現する。
【0004】
【数1】
 ここで、列車走行抵抗は、列車走行時に発生する抵抗力であり、計算の便宜上、以下で構成されると考える場合が多い。
ここで、列車走行抵抗は、列車走行時に発生する抵抗力であり、計算の便宜上、以下で構成されると考える場合が多い。
【0005】
・出発抵抗:発車の際の抵抗
・空気抵抗:列車走行上の空気による抵抗(車輪踏面とレール面との間の抵抗も考慮し速度の2次式として取り扱う)
・勾配抵抗:勾配に起因する抵抗
・曲線抵抗:曲線に起因する抵抗
・トンネル抵抗:トンネル内を走行するときに発生する抵抗
また、一般的に列車走行抵抗は、勾配抵抗、空気抵抗(車輪踏面とレール面との間の抵抗も考慮含む)、曲線抵抗、トンネル抵抗等から成ると考える場合が多い。しかしここでは、トンネル以外の列車走行時を考えるため、勾配抵抗、空気抵抗(車輪踏面とレール面との間の抵抗も考慮)、曲線抵抗だけに関して考える。この場合、勾配抵抗、空気抵抗、曲線抵抗は以下の式で求められる。
【0006】
【数2】
自動列車運転の際に、式(1)のようなモデルを利用する場合、走行計画に基づく自動列車運転方式においても、列車特性や路線特性等の特性が乗り心地の向上や停止精度に大きく影響する。
【0007】
【特許文献1】
特開2002−271918号公報。
【0008】
【非特許文献1】
運転理論(直流交流電気機関車」、交友社編。
【0009】
【発明が解決しようとする課題】
従来の方式は、上述したように、列車や路線の特性またはパラメータに依存するところが大きく、自動列車運転装置の調整に多大な労力が必要であった。また、この調整においては、実際に列車を何度も走行させデータを取得し、オフライン的に調整を進める必要があった。特に、目標停止位置へ停止させるための調整に労力を要した。
【0010】
本発明は、このような従来の技術的課題に鑑みてなされたもので、列車の停止精度を向上させることができる自動列車運転装置を提供することを目的とする。
【0011】
本発明はまた、列車の停止制御機能の調整に必要な時間、労力を低減させることができる自動列車運転装置を提供することを目的とする。
【0012】
【課題を解決するための手段】
請求項1の発明は、あらかじめ設定した目標停止位置手前n[m]から目標停止位置停止制御を行う自動列車運転装置であって、速度計測器と、前記速度計測器から周期的に得られる速度データと、あらかじめ記憶部に登録されている速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとをもとに、当該目標停止位置に停止させるための制御指令を演算する目標停止位置停止制御部と、前記目標停止位置停止制御部の出力する制御指令により列車速度を加減する加減速制御部とを有して成るものである。
【0013】
請求項1の発明の自動列車運転装置では、列車を自動運転し、目標停止位置に精度良く停止させる。この目標停止位置停止制御では、目標停止位置手前n[m]から動作し、この目標停止位置停止制御機能動作開始時からの経過時間と、速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御開始位置および目標停止位置のデータとを用いて、目標停止位置停止制御部にて目標停止位置に停止するための制御指令(ブレーキノッチ)を演算し、この制御指令に基づいて停止制御する。
【0014】
この目標停止位置停止制御部の実現方法は、実際の列車が目標停止位置±許容誤差内に停止できた場合の走行結果をもとに、これらの利用データの関係のテーブルを作成しておき、実際の制御指令演算時には、このテーブルをもとに制御指令を演算する。これにより、列車を目標停止位置に精度良く自動で停止させる。
【0015】
請求項2の発明は、請求項1の自動列車運転装置において、前記目標停止位置停止制御部は、前記速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、多項式近似モデルにより、前記目標停止位置に停止させるための制御指令を演算することを特徴とするものである。
【0016】
請求項2の発明の自動列車運転装置では、目標停止位置停止制御部において、速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、予め与えた多項式近似モデルにより、定位置に停止させるための制御指令(ブレーキノッチ)を演算し、この制御指令に基づいて停止制御する。なお、速度計測周期と各時点の速度データを使用するのに代えて、目標停止位置停止制御を開始してからの経過時間を使用することもできる。これにより、列車を目標停止位置に精度良く自動で停止させる。
【0017】
請求項3の発明は、請求項1の自動列車運転装置において、前記目標停止位置停止制御部は、前記速度計測器から得られる速度データと、速度計測周期と目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、ファジィ推論により、前記前記目標停止位置に停止させるための制御指令を演算することを特徴とするものである。
【0018】
請求項3の発明の自動列車運転装置においては、目標停止位置停止制御部において、速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、ファジィ推論により、定位置に停止させるための制御指令(ブレーキノッチ)を演算し、この制御指令に基づいて停止制御する。これにより、列車を目標停止位置に精度良く自動で停止させる。
【0019】
請求項4の発明は、請求項1の自動列車運転装置において、前記目標停止位置停止制御部は、前記速度計測器から得られる速度データと、速度計測周期と目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、ゲインスケジューリング手法により、前記前記目標停止位置に停止させるための制御指令を演算することを特徴とするものである。
【0020】
請求項4の発明の自動列車運転装置においては、目標停止位置停止制御部において、速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、ゲインスケジューリング手法により、定位置に停止させるための制御指令(ブレーキノッチ)を演算し、この制御指令に基づいて停止制御する。これにより、目標停止位置に精度良く自動で停止させる。
【0021】
請求項5の発明は、請求項1の自動列車運転装置において、前記目標停止位置停止制御部は、前記速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、ニューラルネットワークにより、前記前記目標停止位置に停止させるための制御指令を演算することを特徴とするものである。
【0022】
請求項5の発明の自動列車運転装置においては、目標停止位置停止制御部において、速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、ニューラルネットワークにより、定位置に停止させるための制御指令(ブレーキノッチ)を演算し、この制御指令に基づいて停止制御する。これにより、目標停止位置に精度良く自動で停止させる。
【0023】
請求項6の発明は、請求項5の自動列車運転装置において、前記目標停止位置停止制御部に加え、制御指令出力結果および速度計測値のデータから前記ニューラルネットワークを学習するニューラルネットワーク学習部を有することを特徴とするものである。
【0024】
請求項6の発明の自動列車運転装置においては、請求項5の自動列車運転装置に対してニューラルネットワーク学習部を備え、自動列車運転制御時にニューラルネットワーク学習部により列車走行結果(制御指令出力結果および速度計測値)からニューラルネットワークを学習する。これによってより精度の高い目標停止位置停止制御を可能にする。
【0025】
請求項7の発明は、請求項5の自動列車運転装置において、目標停止位置停止制御部の利用データに、駅識別コードを加えたことを特徴とするものである。
【0026】
請求項7の発明の自動列車運転装置においては、請求項5の自動列車運転装置に対して、ニューラルネットワークの入力に駅識別コードを追加したものを利用することにより、駅毎の違いを学習しやすくし、制御条件が異なる駅毎に精度の高い目標停止位置停止制御を可能にする。
【0027】
請求項8の発明は、請求項5の自動列車運転装置において、前記目標停止位置停止制御部の利用データに、天候データを加えたことを特徴とするものである。
【0028】
請求項8の発明の自動列車運転装置においては、請求項5の自動列車運転装置に対して、ニューラルネットワークの入力に天候データを使用することで、天候の影響を受けやすい場所(例えば、地下のみの地下鉄等は影響を受けないが、明かり部を走行する場合は雨の影響がある場合等が考えられる)の学習をしやすくし、制御条件が異なる天候に応じた精度の高い目標停止位置停止制御を可能にする。
【0029】
請求項9の発明は、請求項5の自動列車運転装置において、前記目標停止位置停止制御部の利用データに、勾配データ、曲率データ、トンネルデータを加えたことを特徴とするものである。
【0030】
請求項9の発明の自動列車運転装置においては、請求項5の自動列車運転装置に対して、ニューラルネットワークの入力に勾配データ、曲率データ、トンネルデータを使用することで、地形データを考慮した学習を行い、地形条件に応じた目標停止位置停止制御を行うことにより、地形条件が異なる地形に応じた精度の高い目標停止位置停止制御を可能にする。
【0031】
【発明の実施の形態】
以下、本発明の実施の形態を図に基づいて詳説する。図1は、本発明の第1の実施の形態の自動列車運転装置を搭載した列車を示している。図1に示すように、第1の実施の形態の自動列車運転装置を搭載した列車は、列車本体1と、自動列車制御装置(ATC)2と、列車運転に必要な諸データを保持するデータベース(DB)3、車載されている車載DB3′と、運転台4と、応荷重装置5と、速度検出器6と、地上子検出器7と、自動列車運転装置8と、駆動装置9と、減速装置10を備えている。
【0032】
自動列車運転装置8は、加速制御部11と、減速制御部12と、定速制御部13と、目標停止位置停止制御部14から成る。
【0033】
図3に示すように、目標停止位置停止制御部14は、ニューラルネットワーク15とニューラルネットワーク学習部16、走行結果保存部17から成る。
【0034】
上記構成の第1の実施の形態の自動列車運転装置を搭載した列車の動作を説明する。ATC2、DB3、車載DB3′、運転台4、応荷重装置5、速度検出器6、地上子検出器7から得られる情報をもとに、自動列車運転装置8にて列車自動運転用の制御指令を演算し、駆動装置9、減速装置10に制御指令を出力し、列車の自動運転を行う。
【0035】
まず、列車本体1の作用について説明し、次に自動列車運転装置8の詳細作用に関して説明する。列車本体1では、ATC2、DB3、車載DB3′、応荷重装置5、速度検出器6、地上子検出器7から以下の情報を得る。
【0036】
<自動列車運転時利用情報>
・ATC2:ATC速度制限およびATC介入情報。
【0037】
・DB3、車載DB3′:路線条件(勾配、曲率等)、車両条件(重量、加減速特性等)、運行条件(ダイヤ等)。
【0038】
・応荷重装置5:重量情報。
【0039】
・速度検出器6:速度計測値。
【0040】
・地上子検出器7:位置補正情報。
【0041】
列車本体1は、上記の自動列車運転時利用情報を利用し、運転台4からの出発信号(運転士が押す等の方法により発生)が得られた時点で列車走行を開始する。
【0042】
列車走行中は、上記のデータを用いて、自動列車運転装置8にて自動運転用の制御指令を作成する。作成された制御指令は駆動装置9、減速装置10に出力され、これをもとに列車は走行する。現状では、制御指令は段階的な指令であるノッチが利用される。力行の場合は制御指令として力行ノッチが駆動装置9に出力され、ブレーキの場合は、制御指令としてブレーキノッチが減速装置10に出力される。惰行の場合は、力行ノッチ、ブレーキノッチそれぞれが0である。
【0043】
このようにして、自動列車運転装置8にて演算される制御指令をもとに、次駅まで自動運転を行う。
【0044】
次に、自動列車運転装置8の処理動作の詳細について、図2のフローチャートを用いて説明する。自動列車運転装置8は、図1に示したように、加速制御部11、減速制御部12、定速制御部13、目標停止位置停止制御部14から成る。自動列車運転装置8では、前述の自動列車運転時利用情報を利用して制御指令を演算する。
【0045】
まず、運転台4からの出発信号が得られた時点で、加速制御部11により加速用の力行ノッチ指令を出力し、これによって制御指令を出力する(図2におけるステップS1,S21,S3)。
【0046】
また、制限速度等の路線状況により列車の減速が必要な場合は、減速制御部12にて妥当なブレーキノッチを演算し、制御指令としてブレーキノッチを出力する(ステップS1,S22,S3)。
【0047】
さらに、定速走行が必要な場合には、目標速度に合わせることを目的とし、PI制御等を利用することで適切な力行ノッチ、ブレーキノッチを選択し、これにより定速走行用の制御指令を演算して出力する(ステップS1,S23,S3)。
【0048】
なお、惰行区間が設定されている場合は、力行ノッチ、ブレーキノッチ共に出力しないこととなるが、列車速度が余りにも高い場合、もしくは低い場合は、速度誤差に基づいた制御指令補正を行うことが有効である。
【0049】
上記の自動列車運転制御は、ある駅を出発し、次駅に到着して停止するまで繰返す(ステップS4,S5)。
【0050】
列車はこのように自動列車運転装置8にて得られる制御指令をもとに駅間を走行していくが、加速すべき区間、減速すべき区間、定速走行の区間等に関しては、予め設定したデータをDB3、車載DB3′に保存し、これを利用する方式や、制限速度、路線条件等の情報から列車上で設定する方式がある。
【0051】
次に、目標停止位置停止制御部14に関して説明する。列車が駅間を走行していき、目標停止位置手前n[m](例えば20[m])に到達以降は、目標停止位置停止制御部14にて演算される制御指令を使用し、自動運転を行う(ステップS1,S24)。
【0052】
目標停止位置停止制御部14は、図3に示すように、ニューラルネットワーク15、ニューラルネットワーク学習部16、走行結果保存部17から成る。
【0053】
ニューラルネットワーク15は図4のような構成であり、速度データv(t)、速度計測周期Δt、目標停止位置停止制御を開始してからの経過時間(以下、「経過時間」と略す)T、目標停止位置停止制御開始位置L1および目標停止位置L2のデータとを入力し、制御指令Bを出力する。
【0054】
ここで、ニューラルネットワーク15は、ニューラルネットワーク学習部16にて学習したものを利用する。具体的には、ニューラルネットワーク学習部16にて、走行結果保存部17にて保存された走行結果データを用いてニューラルネットワークの重み係数等を学習し、学習したニューラルネットワークを用いて制御指令を演算する。
【0055】
このニューラルネットワークは、非線形の写像や、入出力関係を学習することによく利用されるものである(例えば、「ニューラルネットワーク情報処理」、麻生英樹著、産業図書刊)。
【0056】
本実施の形態の場合、速度データ、速度計測周期、経過時間と制御指令(ブレーキノッチ)の関係を表すようなニューラルネットワークを構築し、停止制御に利用する。
【0057】
写像や入出力関係を表現するために一般的に利用されるのは階層型ニューラルネットワークである。これは、入力層に入力データを入力し、出力層から出力されるデータとの関係を、ニューラルネットワーク自体に学習させていくものである。入力データとして速度データv(t)、速度計測周期Δt、経過時間T、目標停止位置停止制御開始位置L1および目標停止位置L2のデータを用いて、出力データは制御指令(ブレーキノッチ)Bである。
【0058】
階層型ニューラルネットワークの学習は、一般的に誤差逆伝搬法を利用する。ここでは、仕様を満足する停止精度の実走行データを利用し、事前に学習したニューラルネットワークを利用することで、制御指令(ブレーキノッチ)を演算し、目標停止位置停止制御を行う。
【0059】
制御指令演算は、実装したニューラルネットワーク15に対し、入力データとして、演算時点tでの速度データv(t)、速度計測周期Δt、経過時間T、目標停止位置停止制御開始位置L1および目標停止位置L2のデータとを入力し、制御指令(ブレーキノッチ)Bを出力するため、これを制御指令として利用する。
【0060】
図5にニューラルネットワークの学習の概要を示す。ニューラルネットワークの学習は、保存された列車走行結果を利用して行う。この際に、ニューラルネットワーク学習部16では、目標停止位置に精度良く停止した場合のデータのみを利用する。精度良く停止した場合の速度データに対するブレーキノッチ指令を教師信号Bt(t)として学習を行うことで、学習後のニューラルネットワークにて精度良く停止するためのブレーキノッチ指令が演算可能となる。また、実走行前の場合は、計算機シミュレーションの結果を用いて学習させることができる。さらに、学習のタイミングとしては、駅間走行後や、1日の走行終了後等、走行結果が得られた後となる。
【0061】
以上により、第1の実施の形態の自動列車運転装置によれば、停止精度が良好な場合の走行結果を学習したニューラルネットワークにより制御指令(ブレーキノッチ指令)を演算し、自動列車走行に使用することで、列車を自動的に精度良く目標停止位置に停止する自動運転が可能である。
【0062】
また、ニューラルネットワークは、その非線形学習能力により、利用データと制御指令との関係に多項式近似モデル等で表現しにくい要素が含まれるような場合にも精度良い目標停止位置停止制御が自動運転で可能になる。
【0063】
さらにニューラルネットワークを使用していることから、運用後も停止精度向上のための学習が可能であり、運用後に停止位置精度を向上させることができる。
【0064】
なお、目標停止位置停止制御部14のニューラルネットワーク15において、その入力に駅識別コードを追加したものを利用することができ、このような駅識別コードを入力として使用することで、駅毎の違いを学習しやすくすることができる。
【0065】
また、目標停止位置停止制御部14のニューラルネットワーク15において、その入力に天候データを追加したものを利用することもでき、このような天候データを入力として使用することで、天候の影響を受けやすい場所(例えば、地下のみの地下鉄等は影響を受けないが、明かり部を走行する場合は雨の影響がある場合等)の学習をしやすくできる。
【0066】
また、目標停止位置停止制御部14のニューラルネットワーク15において、その入力に勾配データ、曲率データ、トンネルデータのような地形データを追加したものを利用することができ、このように勾配データ、曲率データ、トンネルデータを入力として使用することで、地形データを考慮した学習を行うことができ、いっそう精度の高い目標停止位置停止制御が可能となる。
【0067】
次に、本発明の第2の実施の形態の自動列車運転装置について、図6を用いて説明する。第2の実施の形態の自動列車運転装置の構成は図1に示した第1の実施の形態と共通であるが、目標停止位置停止制御部14の内部構成が異なっており、図6に示す構成である。
【0068】
すなわち、本実施の形態の自動列車運転装置では、図6に示したように、目標停止位置停止制御部14には多項式近似モデル演算部21を備えている。この多項式近似モデル演算部21は、速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、多項式近似モデルにより、定位置に停止させるための制御指令(ブレーキノッチ)を演算して出力する。
【0069】
この多項式近似モデル演算部21は、例えば以下のような多項式近似モデルを使用し、ブレーキノッチ指令を演算する。
【0070】
【数3】
なお、上記では速度計測周期と各時点の速度データを使用しているが、目標停止位置停止制御を開始してからの経過時間を使用することもできる。
【0071】
この第2の実施の形態の自動列車運転装置によれば、多項式近似モデルを用いて制御指令(ブレーキノッチ指令)を演算することにより、列車を目標停止位置に精度良く自動で停止させることが可能となる。
【0072】
次に、本発明の第3の実施の形態の自動列車運転装置について、図7を用いて説明する。第3の実施の形態の自動列車運転装置の構成は図1に示した第1の実施の形態と共通であるが、目標停止位置停止制御部14の内部構成が異なっており、図7に示す構成である。
【0073】
すなわち、本実施の形態の自動列車運転装置では、図7に示したように、目標停止位置停止制御部14にはファジィ推論部22を備えている。このファジィ推論部22は、速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、ファジィ推論により、定位置に停止させるための制御指令(ブレーキノッチ)を演算して出力する。
【0074】
このファジィ推論部22は、例えば、目標停止位置停止制御開始位置と目標停止位置とが一定の場合、以下のようなファジィルールを利用する。
【0075】
【数4】
上記の′大′、′中′、′小′等の判断基準を、メンバシップ関数を使用することによりファジィに取り扱うことで、ルールの数を減少させることができる。
【0076】
このファジィ推論に関しては、プラント制御や道路トンネル換気制御等に応用されており、例えば、「実用ファジィ制御技術」、社団法人電子情報通信学会発行に記載されているように、実用レベルの技術である。
【0077】
以上の第3の実施の形態の自動列車運転装置によれば、ファジィ推論を用いて制御指令(ブレーキノッチ指令)を演算することにより、列車を目標停止位置に精度良く自動で停止させることが可能となる。
【0078】
次に、本発明の第4の実施の形態の自動列車運転装置について、図8を用いて説明する。第4の実施の形態の自動列車運転装置の構成は図1に示した第1の実施の形態と共通であるが、目標停止位置停止制御部14の内部構成が異なっており、図8に示す構成である。
【0079】
すなわち、本実施の形態の自動列車運転装置では、図8に示したように、目標停止位置停止制御部14にはゲインスケジューリング部23を備えている。このゲインスケジューリング部23は、速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、ゲインスケジューリング手法により、定位置に停止させるための制御指令(ブレーキノッチ)を演算し、それを用いて停止制御させるものである。
【0080】
ゲインスケジューリング手法とは、予め状況に合わせた制御ゲインを決定しておき、決定された制御ゲインを状況に合わせて利用する制御手法である。制御手法では、誤差に応じた制御手法であるPI制御等を利用する。例えば、目標停止位置停止制御開始位置と目標停止位置とが一定の場合で、目標速度と速度計測値との誤差に基づくP制御を行う場合、ブレーキ制御の制御ゲインに以下の表2のようなスケジューリングされたゲインを利用する。
【0081】
・目標停止位置停止制御部14の出力:B=Cp×E
ここで、B:ブレーキノッチ指令、Cp:制御ゲイン、E:速度誤差である。
【0082】
・制御ゲイン:Cpは表1の制御ゲイン決定表による。
【0083】
【表1】
この表1のような制御ゲイン決定用の表は、理論解析の結果を実走行試験により調整し、求めたものを登録している。
【0084】
以上の第4の実施の形態の自動列車運転装置によれば、ゲインスケジューリング手法を使用して制御指令(ブレーキノッチ指令)を演算することにより、列車を目標停止位置に精度良く自動で停止させることができる。
【0085】
次に、本発明の第5の実施の形態の自動列車運転装置について、図9を用いて説明する。第5の実施の形態の自動列車運転装置の構成は図1に示した第1の実施の形態と共通であるが、目標停止位置停止制御部14の内部構成が異なっており、図9に示す構成である。
【0086】
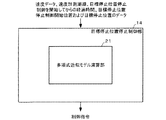
すなわち、本実施の形態の自動列車運転装置では、図9に示したように、目標停止位置停止制御部14には目標停止位置停止制御指令演算部24を備えている。
【0087】
この目標停止位置停止制御指令演算部24は、目標停止位置停止制御では、目標停止位置手前n[m]から動作し、この目標停止位置停止制御機能動作開始時からの経過時間と、速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御開始位置および目標停止位置のデータとを用いて、目標停止位置停止制御部にて目標停止位置に停止するための制御指令(ブレーキノッチ)を決定し、この制御指令に基づいて停止制御する。
【0088】
【表2】
この目標停止位置停止制御指令演算部24による目標停止位置停止制御の実現方法は、実際の列車が目標停止位置±許容誤差内に停止できた場合の走行結果をもとに、表2に示すようなこれらの利用データの関係のテーブルを作成しておき、実際の制御指令演算時には、このテーブルをもとに制御指令を演算する。
【0089】
以上の第5の実施の形態の自動列車運転装置によれば、予め登録した適切なテーブルデータを参照し、現実の速度データ、速度計測周期、目標停止位置停止制御開始位置および目標停止位置のデータとに対応する制御指令(ブレーキノッチ)を決定し、これに基づいて停止制御することにより、列車を目標停止位置に精度良く自動で停止させることができる。
【0090】
【発明の効果】
請求項1の発明によれば、速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとをもとに自動運転を行うことで、リアルタイムな位置データを用いずに良好な目標停止位置停止精度で自動運転することができる。
【0091】
請求項2の発明によれば、速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとをもとに多項式近似モデルで制御指令を演算することで、リアルタイムな位置データを用いずに良好な目標停止位置停止精度で自動運転することができ、多項式近似モデルを利用することから、処理が少なく実装負荷が少ない状況でも自動運転を可能にする。
【0092】
請求項3の発明によれば、速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとをもとにファジィ推論で制御指令を演算することで、リアルタイムな位置データを用いずに良好な目標停止位置停止精度で自動運転することができ、ファジィ推論を利用することから、あいまいな処理を用いた自動運転を可能にする。
【0093】
請求項4の発明によれば、速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとをもとにゲインスケジューリング手法で制御指令を演算することで、リアルタイムな位置データを用いずに良好な目標停止位置停止精度で自動運転することができ、ゲインスケジューリング手法を利用することから、PI制御等の制御技術の利点を併せ持った自動運転を可能にする。
【0094】
請求項5の発明によれば、速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとをもとにニューラルネットワークで制御指令を演算することで、リアルタイムな位置データを用いずに良好な目標停止位置停止精度で自動運転することができ、ニューラルネットワークを利用することから、前述のデータと制御指令間に明確な関数表現ができない場合でもニューラルネットワークの写像表現能力により目標停止位置停止制御が実現できる。
【0095】
請求項6の発明によれば、良好な停止精度の走行結果からニューラルネットワークを学習することで、運用後もより停止精度の向上が可能な自動列車制御装置が実現できる。
【0096】
請求項7の発明によれば、ニューラルネットワークの入力に駅識別コードを用いることから、駅毎の違いによる制御指令の違いを学習しやすくし、制御条件が異なる駅毎に精度の高い目標停止位置停止制御が可能である。
【0097】
請求項8の発明によればニューラルネットワークの入力に天候データを使用することから、天候の影響を受けやすい場所の学習をしやすくし、制御条件が異なる天候に応じた精度の高い目標停止位置停止制御が可能である。
【0098】
請求項9の発明によれば、ニューラルネットワークの入力に勾配データ、曲率データ、トンネルデータを使用することから、地形データを考慮した学習を行い、地形条件に応じた目標停止位置停止制御を行うことにより、地形条件が異なる地形に応じた精度の高い目標停止位置停止制御が可能である。
【図面の簡単な説明】
【図1】本発明の第1の実施の形態の自動列車運転装置を装備した列車装置のブロック図。
【図2】第1の実施の形態による自動列車運転処理のフローチャート。
【図3】第1の実施の形態における目標停止位置停止制御部の詳細ブロック図。
【図4】第1の実施の形態におけるニューラルネットワークによる制御指令演算の概要図。
【図5】上記のニューラルネットワークの学習の概要図。
【図6】本発明の第2の実施の形態における目標停止位置停止制御部のブロック図。
【図7】本発明の第3の実施の形態における目標停止位置停止制御部のブロック図。
【図8】本発明の第4の実施の形態における目標停止位置停止制御部のブロック図。
【図9】本発明の第5の実施の形態における目標停止位置停止制御部のブロック図。
【符号の説明】
1:列車本体
2:ATC(自動列車制御装置)
3:DB(データベース)
3′:車載データベース
4:運転台
5:応荷重装置
6:速度検出器
7:地上子検出器
8:自動列車運転装置
9:駆動装置
10:減速装置
11:加速制御部
12:減速制御部
13:定速制御部
14:目標停止位置停止制御部
15:ニューラルネットワーク
16:ニューラルネットワーク学習部
17:走行結果保存部
21:多項式近似モデル演算部
22:ファジィ推論部
23:ゲインスケジューリング部
24:目標停止位置停止制御指令演算部
【発明の属する技術分野】
本発明は、列車の速度計測値および速度計測周期を利用し、列車を目標停止位置に自動停止させる自動列車運転装置に関する。
【0002】
【従来の技術】
自動列車運転装置(Automatic Train Operation:以下、「ATO」とする。)は、制限速度ないしは制限速度からある程度の余裕を持たせた速度に列車を追従させようとするものとしてすでに実用化されている。しかしながら、PI制御等の誤差追従制御を主体としているため、列車や路線の特性に依存するところが多く、現状では、各列車や各路線に対し、特性またはパラメータ調整を行うためにかなりの時間および労力を必要としている。
【0003】
また、走行計画を作成し、これをもとにした列車走行を行うような自動列車運転装置も考えられている。この場合、走行計画を作成する場合に、簡易的な列車走行モデルを利用する場合がある。最も簡単なものとしては、まず対象の列車を次に示す式のような簡単な物理式にて表現する。
【0004】
【数1】
【0005】
・出発抵抗:発車の際の抵抗
・空気抵抗:列車走行上の空気による抵抗(車輪踏面とレール面との間の抵抗も考慮し速度の2次式として取り扱う)
・勾配抵抗:勾配に起因する抵抗
・曲線抵抗:曲線に起因する抵抗
・トンネル抵抗:トンネル内を走行するときに発生する抵抗
また、一般的に列車走行抵抗は、勾配抵抗、空気抵抗(車輪踏面とレール面との間の抵抗も考慮含む)、曲線抵抗、トンネル抵抗等から成ると考える場合が多い。しかしここでは、トンネル以外の列車走行時を考えるため、勾配抵抗、空気抵抗(車輪踏面とレール面との間の抵抗も考慮)、曲線抵抗だけに関して考える。この場合、勾配抵抗、空気抵抗、曲線抵抗は以下の式で求められる。
【0006】
【数2】
【0007】
【特許文献1】
特開2002−271918号公報。
【0008】
【非特許文献1】
運転理論(直流交流電気機関車」、交友社編。
【0009】
【発明が解決しようとする課題】
従来の方式は、上述したように、列車や路線の特性またはパラメータに依存するところが大きく、自動列車運転装置の調整に多大な労力が必要であった。また、この調整においては、実際に列車を何度も走行させデータを取得し、オフライン的に調整を進める必要があった。特に、目標停止位置へ停止させるための調整に労力を要した。
【0010】
本発明は、このような従来の技術的課題に鑑みてなされたもので、列車の停止精度を向上させることができる自動列車運転装置を提供することを目的とする。
【0011】
本発明はまた、列車の停止制御機能の調整に必要な時間、労力を低減させることができる自動列車運転装置を提供することを目的とする。
【0012】
【課題を解決するための手段】
請求項1の発明は、あらかじめ設定した目標停止位置手前n[m]から目標停止位置停止制御を行う自動列車運転装置であって、速度計測器と、前記速度計測器から周期的に得られる速度データと、あらかじめ記憶部に登録されている速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとをもとに、当該目標停止位置に停止させるための制御指令を演算する目標停止位置停止制御部と、前記目標停止位置停止制御部の出力する制御指令により列車速度を加減する加減速制御部とを有して成るものである。
【0013】
請求項1の発明の自動列車運転装置では、列車を自動運転し、目標停止位置に精度良く停止させる。この目標停止位置停止制御では、目標停止位置手前n[m]から動作し、この目標停止位置停止制御機能動作開始時からの経過時間と、速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御開始位置および目標停止位置のデータとを用いて、目標停止位置停止制御部にて目標停止位置に停止するための制御指令(ブレーキノッチ)を演算し、この制御指令に基づいて停止制御する。
【0014】
この目標停止位置停止制御部の実現方法は、実際の列車が目標停止位置±許容誤差内に停止できた場合の走行結果をもとに、これらの利用データの関係のテーブルを作成しておき、実際の制御指令演算時には、このテーブルをもとに制御指令を演算する。これにより、列車を目標停止位置に精度良く自動で停止させる。
【0015】
請求項2の発明は、請求項1の自動列車運転装置において、前記目標停止位置停止制御部は、前記速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、多項式近似モデルにより、前記目標停止位置に停止させるための制御指令を演算することを特徴とするものである。
【0016】
請求項2の発明の自動列車運転装置では、目標停止位置停止制御部において、速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、予め与えた多項式近似モデルにより、定位置に停止させるための制御指令(ブレーキノッチ)を演算し、この制御指令に基づいて停止制御する。なお、速度計測周期と各時点の速度データを使用するのに代えて、目標停止位置停止制御を開始してからの経過時間を使用することもできる。これにより、列車を目標停止位置に精度良く自動で停止させる。
【0017】
請求項3の発明は、請求項1の自動列車運転装置において、前記目標停止位置停止制御部は、前記速度計測器から得られる速度データと、速度計測周期と目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、ファジィ推論により、前記前記目標停止位置に停止させるための制御指令を演算することを特徴とするものである。
【0018】
請求項3の発明の自動列車運転装置においては、目標停止位置停止制御部において、速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、ファジィ推論により、定位置に停止させるための制御指令(ブレーキノッチ)を演算し、この制御指令に基づいて停止制御する。これにより、列車を目標停止位置に精度良く自動で停止させる。
【0019】
請求項4の発明は、請求項1の自動列車運転装置において、前記目標停止位置停止制御部は、前記速度計測器から得られる速度データと、速度計測周期と目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、ゲインスケジューリング手法により、前記前記目標停止位置に停止させるための制御指令を演算することを特徴とするものである。
【0020】
請求項4の発明の自動列車運転装置においては、目標停止位置停止制御部において、速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、ゲインスケジューリング手法により、定位置に停止させるための制御指令(ブレーキノッチ)を演算し、この制御指令に基づいて停止制御する。これにより、目標停止位置に精度良く自動で停止させる。
【0021】
請求項5の発明は、請求項1の自動列車運転装置において、前記目標停止位置停止制御部は、前記速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、ニューラルネットワークにより、前記前記目標停止位置に停止させるための制御指令を演算することを特徴とするものである。
【0022】
請求項5の発明の自動列車運転装置においては、目標停止位置停止制御部において、速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、ニューラルネットワークにより、定位置に停止させるための制御指令(ブレーキノッチ)を演算し、この制御指令に基づいて停止制御する。これにより、目標停止位置に精度良く自動で停止させる。
【0023】
請求項6の発明は、請求項5の自動列車運転装置において、前記目標停止位置停止制御部に加え、制御指令出力結果および速度計測値のデータから前記ニューラルネットワークを学習するニューラルネットワーク学習部を有することを特徴とするものである。
【0024】
請求項6の発明の自動列車運転装置においては、請求項5の自動列車運転装置に対してニューラルネットワーク学習部を備え、自動列車運転制御時にニューラルネットワーク学習部により列車走行結果(制御指令出力結果および速度計測値)からニューラルネットワークを学習する。これによってより精度の高い目標停止位置停止制御を可能にする。
【0025】
請求項7の発明は、請求項5の自動列車運転装置において、目標停止位置停止制御部の利用データに、駅識別コードを加えたことを特徴とするものである。
【0026】
請求項7の発明の自動列車運転装置においては、請求項5の自動列車運転装置に対して、ニューラルネットワークの入力に駅識別コードを追加したものを利用することにより、駅毎の違いを学習しやすくし、制御条件が異なる駅毎に精度の高い目標停止位置停止制御を可能にする。
【0027】
請求項8の発明は、請求項5の自動列車運転装置において、前記目標停止位置停止制御部の利用データに、天候データを加えたことを特徴とするものである。
【0028】
請求項8の発明の自動列車運転装置においては、請求項5の自動列車運転装置に対して、ニューラルネットワークの入力に天候データを使用することで、天候の影響を受けやすい場所(例えば、地下のみの地下鉄等は影響を受けないが、明かり部を走行する場合は雨の影響がある場合等が考えられる)の学習をしやすくし、制御条件が異なる天候に応じた精度の高い目標停止位置停止制御を可能にする。
【0029】
請求項9の発明は、請求項5の自動列車運転装置において、前記目標停止位置停止制御部の利用データに、勾配データ、曲率データ、トンネルデータを加えたことを特徴とするものである。
【0030】
請求項9の発明の自動列車運転装置においては、請求項5の自動列車運転装置に対して、ニューラルネットワークの入力に勾配データ、曲率データ、トンネルデータを使用することで、地形データを考慮した学習を行い、地形条件に応じた目標停止位置停止制御を行うことにより、地形条件が異なる地形に応じた精度の高い目標停止位置停止制御を可能にする。
【0031】
【発明の実施の形態】
以下、本発明の実施の形態を図に基づいて詳説する。図1は、本発明の第1の実施の形態の自動列車運転装置を搭載した列車を示している。図1に示すように、第1の実施の形態の自動列車運転装置を搭載した列車は、列車本体1と、自動列車制御装置(ATC)2と、列車運転に必要な諸データを保持するデータベース(DB)3、車載されている車載DB3′と、運転台4と、応荷重装置5と、速度検出器6と、地上子検出器7と、自動列車運転装置8と、駆動装置9と、減速装置10を備えている。
【0032】
自動列車運転装置8は、加速制御部11と、減速制御部12と、定速制御部13と、目標停止位置停止制御部14から成る。
【0033】
図3に示すように、目標停止位置停止制御部14は、ニューラルネットワーク15とニューラルネットワーク学習部16、走行結果保存部17から成る。
【0034】
上記構成の第1の実施の形態の自動列車運転装置を搭載した列車の動作を説明する。ATC2、DB3、車載DB3′、運転台4、応荷重装置5、速度検出器6、地上子検出器7から得られる情報をもとに、自動列車運転装置8にて列車自動運転用の制御指令を演算し、駆動装置9、減速装置10に制御指令を出力し、列車の自動運転を行う。
【0035】
まず、列車本体1の作用について説明し、次に自動列車運転装置8の詳細作用に関して説明する。列車本体1では、ATC2、DB3、車載DB3′、応荷重装置5、速度検出器6、地上子検出器7から以下の情報を得る。
【0036】
<自動列車運転時利用情報>
・ATC2:ATC速度制限およびATC介入情報。
【0037】
・DB3、車載DB3′:路線条件(勾配、曲率等)、車両条件(重量、加減速特性等)、運行条件(ダイヤ等)。
【0038】
・応荷重装置5:重量情報。
【0039】
・速度検出器6:速度計測値。
【0040】
・地上子検出器7:位置補正情報。
【0041】
列車本体1は、上記の自動列車運転時利用情報を利用し、運転台4からの出発信号(運転士が押す等の方法により発生)が得られた時点で列車走行を開始する。
【0042】
列車走行中は、上記のデータを用いて、自動列車運転装置8にて自動運転用の制御指令を作成する。作成された制御指令は駆動装置9、減速装置10に出力され、これをもとに列車は走行する。現状では、制御指令は段階的な指令であるノッチが利用される。力行の場合は制御指令として力行ノッチが駆動装置9に出力され、ブレーキの場合は、制御指令としてブレーキノッチが減速装置10に出力される。惰行の場合は、力行ノッチ、ブレーキノッチそれぞれが0である。
【0043】
このようにして、自動列車運転装置8にて演算される制御指令をもとに、次駅まで自動運転を行う。
【0044】
次に、自動列車運転装置8の処理動作の詳細について、図2のフローチャートを用いて説明する。自動列車運転装置8は、図1に示したように、加速制御部11、減速制御部12、定速制御部13、目標停止位置停止制御部14から成る。自動列車運転装置8では、前述の自動列車運転時利用情報を利用して制御指令を演算する。
【0045】
まず、運転台4からの出発信号が得られた時点で、加速制御部11により加速用の力行ノッチ指令を出力し、これによって制御指令を出力する(図2におけるステップS1,S21,S3)。
【0046】
また、制限速度等の路線状況により列車の減速が必要な場合は、減速制御部12にて妥当なブレーキノッチを演算し、制御指令としてブレーキノッチを出力する(ステップS1,S22,S3)。
【0047】
さらに、定速走行が必要な場合には、目標速度に合わせることを目的とし、PI制御等を利用することで適切な力行ノッチ、ブレーキノッチを選択し、これにより定速走行用の制御指令を演算して出力する(ステップS1,S23,S3)。
【0048】
なお、惰行区間が設定されている場合は、力行ノッチ、ブレーキノッチ共に出力しないこととなるが、列車速度が余りにも高い場合、もしくは低い場合は、速度誤差に基づいた制御指令補正を行うことが有効である。
【0049】
上記の自動列車運転制御は、ある駅を出発し、次駅に到着して停止するまで繰返す(ステップS4,S5)。
【0050】
列車はこのように自動列車運転装置8にて得られる制御指令をもとに駅間を走行していくが、加速すべき区間、減速すべき区間、定速走行の区間等に関しては、予め設定したデータをDB3、車載DB3′に保存し、これを利用する方式や、制限速度、路線条件等の情報から列車上で設定する方式がある。
【0051】
次に、目標停止位置停止制御部14に関して説明する。列車が駅間を走行していき、目標停止位置手前n[m](例えば20[m])に到達以降は、目標停止位置停止制御部14にて演算される制御指令を使用し、自動運転を行う(ステップS1,S24)。
【0052】
目標停止位置停止制御部14は、図3に示すように、ニューラルネットワーク15、ニューラルネットワーク学習部16、走行結果保存部17から成る。
【0053】
ニューラルネットワーク15は図4のような構成であり、速度データv(t)、速度計測周期Δt、目標停止位置停止制御を開始してからの経過時間(以下、「経過時間」と略す)T、目標停止位置停止制御開始位置L1および目標停止位置L2のデータとを入力し、制御指令Bを出力する。
【0054】
ここで、ニューラルネットワーク15は、ニューラルネットワーク学習部16にて学習したものを利用する。具体的には、ニューラルネットワーク学習部16にて、走行結果保存部17にて保存された走行結果データを用いてニューラルネットワークの重み係数等を学習し、学習したニューラルネットワークを用いて制御指令を演算する。
【0055】
このニューラルネットワークは、非線形の写像や、入出力関係を学習することによく利用されるものである(例えば、「ニューラルネットワーク情報処理」、麻生英樹著、産業図書刊)。
【0056】
本実施の形態の場合、速度データ、速度計測周期、経過時間と制御指令(ブレーキノッチ)の関係を表すようなニューラルネットワークを構築し、停止制御に利用する。
【0057】
写像や入出力関係を表現するために一般的に利用されるのは階層型ニューラルネットワークである。これは、入力層に入力データを入力し、出力層から出力されるデータとの関係を、ニューラルネットワーク自体に学習させていくものである。入力データとして速度データv(t)、速度計測周期Δt、経過時間T、目標停止位置停止制御開始位置L1および目標停止位置L2のデータを用いて、出力データは制御指令(ブレーキノッチ)Bである。
【0058】
階層型ニューラルネットワークの学習は、一般的に誤差逆伝搬法を利用する。ここでは、仕様を満足する停止精度の実走行データを利用し、事前に学習したニューラルネットワークを利用することで、制御指令(ブレーキノッチ)を演算し、目標停止位置停止制御を行う。
【0059】
制御指令演算は、実装したニューラルネットワーク15に対し、入力データとして、演算時点tでの速度データv(t)、速度計測周期Δt、経過時間T、目標停止位置停止制御開始位置L1および目標停止位置L2のデータとを入力し、制御指令(ブレーキノッチ)Bを出力するため、これを制御指令として利用する。
【0060】
図5にニューラルネットワークの学習の概要を示す。ニューラルネットワークの学習は、保存された列車走行結果を利用して行う。この際に、ニューラルネットワーク学習部16では、目標停止位置に精度良く停止した場合のデータのみを利用する。精度良く停止した場合の速度データに対するブレーキノッチ指令を教師信号Bt(t)として学習を行うことで、学習後のニューラルネットワークにて精度良く停止するためのブレーキノッチ指令が演算可能となる。また、実走行前の場合は、計算機シミュレーションの結果を用いて学習させることができる。さらに、学習のタイミングとしては、駅間走行後や、1日の走行終了後等、走行結果が得られた後となる。
【0061】
以上により、第1の実施の形態の自動列車運転装置によれば、停止精度が良好な場合の走行結果を学習したニューラルネットワークにより制御指令(ブレーキノッチ指令)を演算し、自動列車走行に使用することで、列車を自動的に精度良く目標停止位置に停止する自動運転が可能である。
【0062】
また、ニューラルネットワークは、その非線形学習能力により、利用データと制御指令との関係に多項式近似モデル等で表現しにくい要素が含まれるような場合にも精度良い目標停止位置停止制御が自動運転で可能になる。
【0063】
さらにニューラルネットワークを使用していることから、運用後も停止精度向上のための学習が可能であり、運用後に停止位置精度を向上させることができる。
【0064】
なお、目標停止位置停止制御部14のニューラルネットワーク15において、その入力に駅識別コードを追加したものを利用することができ、このような駅識別コードを入力として使用することで、駅毎の違いを学習しやすくすることができる。
【0065】
また、目標停止位置停止制御部14のニューラルネットワーク15において、その入力に天候データを追加したものを利用することもでき、このような天候データを入力として使用することで、天候の影響を受けやすい場所(例えば、地下のみの地下鉄等は影響を受けないが、明かり部を走行する場合は雨の影響がある場合等)の学習をしやすくできる。
【0066】
また、目標停止位置停止制御部14のニューラルネットワーク15において、その入力に勾配データ、曲率データ、トンネルデータのような地形データを追加したものを利用することができ、このように勾配データ、曲率データ、トンネルデータを入力として使用することで、地形データを考慮した学習を行うことができ、いっそう精度の高い目標停止位置停止制御が可能となる。
【0067】
次に、本発明の第2の実施の形態の自動列車運転装置について、図6を用いて説明する。第2の実施の形態の自動列車運転装置の構成は図1に示した第1の実施の形態と共通であるが、目標停止位置停止制御部14の内部構成が異なっており、図6に示す構成である。
【0068】
すなわち、本実施の形態の自動列車運転装置では、図6に示したように、目標停止位置停止制御部14には多項式近似モデル演算部21を備えている。この多項式近似モデル演算部21は、速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、多項式近似モデルにより、定位置に停止させるための制御指令(ブレーキノッチ)を演算して出力する。
【0069】
この多項式近似モデル演算部21は、例えば以下のような多項式近似モデルを使用し、ブレーキノッチ指令を演算する。
【0070】
【数3】
【0071】
この第2の実施の形態の自動列車運転装置によれば、多項式近似モデルを用いて制御指令(ブレーキノッチ指令)を演算することにより、列車を目標停止位置に精度良く自動で停止させることが可能となる。
【0072】
次に、本発明の第3の実施の形態の自動列車運転装置について、図7を用いて説明する。第3の実施の形態の自動列車運転装置の構成は図1に示した第1の実施の形態と共通であるが、目標停止位置停止制御部14の内部構成が異なっており、図7に示す構成である。
【0073】
すなわち、本実施の形態の自動列車運転装置では、図7に示したように、目標停止位置停止制御部14にはファジィ推論部22を備えている。このファジィ推論部22は、速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、ファジィ推論により、定位置に停止させるための制御指令(ブレーキノッチ)を演算して出力する。
【0074】
このファジィ推論部22は、例えば、目標停止位置停止制御開始位置と目標停止位置とが一定の場合、以下のようなファジィルールを利用する。
【0075】
【数4】
【0076】
このファジィ推論に関しては、プラント制御や道路トンネル換気制御等に応用されており、例えば、「実用ファジィ制御技術」、社団法人電子情報通信学会発行に記載されているように、実用レベルの技術である。
【0077】
以上の第3の実施の形態の自動列車運転装置によれば、ファジィ推論を用いて制御指令(ブレーキノッチ指令)を演算することにより、列車を目標停止位置に精度良く自動で停止させることが可能となる。
【0078】
次に、本発明の第4の実施の形態の自動列車運転装置について、図8を用いて説明する。第4の実施の形態の自動列車運転装置の構成は図1に示した第1の実施の形態と共通であるが、目標停止位置停止制御部14の内部構成が異なっており、図8に示す構成である。
【0079】
すなわち、本実施の形態の自動列車運転装置では、図8に示したように、目標停止位置停止制御部14にはゲインスケジューリング部23を備えている。このゲインスケジューリング部23は、速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、ゲインスケジューリング手法により、定位置に停止させるための制御指令(ブレーキノッチ)を演算し、それを用いて停止制御させるものである。
【0080】
ゲインスケジューリング手法とは、予め状況に合わせた制御ゲインを決定しておき、決定された制御ゲインを状況に合わせて利用する制御手法である。制御手法では、誤差に応じた制御手法であるPI制御等を利用する。例えば、目標停止位置停止制御開始位置と目標停止位置とが一定の場合で、目標速度と速度計測値との誤差に基づくP制御を行う場合、ブレーキ制御の制御ゲインに以下の表2のようなスケジューリングされたゲインを利用する。
【0081】
・目標停止位置停止制御部14の出力:B=Cp×E
ここで、B:ブレーキノッチ指令、Cp:制御ゲイン、E:速度誤差である。
【0082】
・制御ゲイン:Cpは表1の制御ゲイン決定表による。
【0083】
【表1】
【0084】
以上の第4の実施の形態の自動列車運転装置によれば、ゲインスケジューリング手法を使用して制御指令(ブレーキノッチ指令)を演算することにより、列車を目標停止位置に精度良く自動で停止させることができる。
【0085】
次に、本発明の第5の実施の形態の自動列車運転装置について、図9を用いて説明する。第5の実施の形態の自動列車運転装置の構成は図1に示した第1の実施の形態と共通であるが、目標停止位置停止制御部14の内部構成が異なっており、図9に示す構成である。
【0086】
すなわち、本実施の形態の自動列車運転装置では、図9に示したように、目標停止位置停止制御部14には目標停止位置停止制御指令演算部24を備えている。
【0087】
この目標停止位置停止制御指令演算部24は、目標停止位置停止制御では、目標停止位置手前n[m]から動作し、この目標停止位置停止制御機能動作開始時からの経過時間と、速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御開始位置および目標停止位置のデータとを用いて、目標停止位置停止制御部にて目標停止位置に停止するための制御指令(ブレーキノッチ)を決定し、この制御指令に基づいて停止制御する。
【0088】
【表2】
【0089】
以上の第5の実施の形態の自動列車運転装置によれば、予め登録した適切なテーブルデータを参照し、現実の速度データ、速度計測周期、目標停止位置停止制御開始位置および目標停止位置のデータとに対応する制御指令(ブレーキノッチ)を決定し、これに基づいて停止制御することにより、列車を目標停止位置に精度良く自動で停止させることができる。
【0090】
【発明の効果】
請求項1の発明によれば、速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとをもとに自動運転を行うことで、リアルタイムな位置データを用いずに良好な目標停止位置停止精度で自動運転することができる。
【0091】
請求項2の発明によれば、速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとをもとに多項式近似モデルで制御指令を演算することで、リアルタイムな位置データを用いずに良好な目標停止位置停止精度で自動運転することができ、多項式近似モデルを利用することから、処理が少なく実装負荷が少ない状況でも自動運転を可能にする。
【0092】
請求項3の発明によれば、速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとをもとにファジィ推論で制御指令を演算することで、リアルタイムな位置データを用いずに良好な目標停止位置停止精度で自動運転することができ、ファジィ推論を利用することから、あいまいな処理を用いた自動運転を可能にする。
【0093】
請求項4の発明によれば、速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとをもとにゲインスケジューリング手法で制御指令を演算することで、リアルタイムな位置データを用いずに良好な目標停止位置停止精度で自動運転することができ、ゲインスケジューリング手法を利用することから、PI制御等の制御技術の利点を併せ持った自動運転を可能にする。
【0094】
請求項5の発明によれば、速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとをもとにニューラルネットワークで制御指令を演算することで、リアルタイムな位置データを用いずに良好な目標停止位置停止精度で自動運転することができ、ニューラルネットワークを利用することから、前述のデータと制御指令間に明確な関数表現ができない場合でもニューラルネットワークの写像表現能力により目標停止位置停止制御が実現できる。
【0095】
請求項6の発明によれば、良好な停止精度の走行結果からニューラルネットワークを学習することで、運用後もより停止精度の向上が可能な自動列車制御装置が実現できる。
【0096】
請求項7の発明によれば、ニューラルネットワークの入力に駅識別コードを用いることから、駅毎の違いによる制御指令の違いを学習しやすくし、制御条件が異なる駅毎に精度の高い目標停止位置停止制御が可能である。
【0097】
請求項8の発明によればニューラルネットワークの入力に天候データを使用することから、天候の影響を受けやすい場所の学習をしやすくし、制御条件が異なる天候に応じた精度の高い目標停止位置停止制御が可能である。
【0098】
請求項9の発明によれば、ニューラルネットワークの入力に勾配データ、曲率データ、トンネルデータを使用することから、地形データを考慮した学習を行い、地形条件に応じた目標停止位置停止制御を行うことにより、地形条件が異なる地形に応じた精度の高い目標停止位置停止制御が可能である。
【図面の簡単な説明】
【図1】本発明の第1の実施の形態の自動列車運転装置を装備した列車装置のブロック図。
【図2】第1の実施の形態による自動列車運転処理のフローチャート。
【図3】第1の実施の形態における目標停止位置停止制御部の詳細ブロック図。
【図4】第1の実施の形態におけるニューラルネットワークによる制御指令演算の概要図。
【図5】上記のニューラルネットワークの学習の概要図。
【図6】本発明の第2の実施の形態における目標停止位置停止制御部のブロック図。
【図7】本発明の第3の実施の形態における目標停止位置停止制御部のブロック図。
【図8】本発明の第4の実施の形態における目標停止位置停止制御部のブロック図。
【図9】本発明の第5の実施の形態における目標停止位置停止制御部のブロック図。
【符号の説明】
1:列車本体
2:ATC(自動列車制御装置)
3:DB(データベース)
3′:車載データベース
4:運転台
5:応荷重装置
6:速度検出器
7:地上子検出器
8:自動列車運転装置
9:駆動装置
10:減速装置
11:加速制御部
12:減速制御部
13:定速制御部
14:目標停止位置停止制御部
15:ニューラルネットワーク
16:ニューラルネットワーク学習部
17:走行結果保存部
21:多項式近似モデル演算部
22:ファジィ推論部
23:ゲインスケジューリング部
24:目標停止位置停止制御指令演算部
Claims (9)
- あらかじめ設定した目標停止位置手前n[m]から目標停止位置停止制御を行う自動列車運転装置であって、
速度計測器と、
前記速度計測器から周期的に得られる速度データと、あらかじめ記憶部に登録されている速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとをもとに、当該目標停止位置に停止させるための制御指令を演算する目標停止位置停止制御部と、
前記目標停止位置停止制御部の出力する制御指令により列車速度を加減する加減速制御部とを有して成る自動列車運転装置。 - 前記目標停止位置停止制御部は、前記速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、多項式近似モデルにより、前記目標停止位置に停止させるための制御指令を演算することを特徴とする請求項1に記載の自動列車運転装置。
- 前記目標停止位置停止制御部は、前記速度計測器から得られる速度データと、速度計測周期と目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、ファジィ推論により、前記前記目標停止位置に停止させるための制御指令を演算することを特徴とする請求項1に記載の自動列車運転装置。
- 前記目標停止位置停止制御部は、前記速度計測器から得られる速度データと、速度計測周期と目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、ゲインスケジューリング手法により、前記前記目標停止位置に停止させるための制御指令を演算することを特徴とする請求項1に記載の自動列車運転装置。
- 前記目標停止位置停止制御部は、前記速度計測器から得られる速度データと、速度計測周期、目標停止位置停止制御を開始してからの経過時間、目標停止位置停止制御開始位置および目標停止位置のデータとを使用し、ニューラルネットワークにより、前記前記目標停止位置に停止させるための制御指令を演算することを特徴とする請求項1に記載の自動列車運転装置。
- 前記目標停止位置停止制御部に加え、制御指令出力結果および速度計測値のデータから前記ニューラルネットワークを学習するニューラルネットワーク学習部を有することを特徴とする請求項5に記載の自動列車運転装置。
- 前記目標停止位置停止制御部の利用データに、駅識別コードを加えたことを特徴とする請求項5に記載の自動列車運転装置。
- 前記目標停止位置停止制御部の利用データに、天候データを加えたことを特徴とする請求項5に記載の自動列車運転装置。
- 前記目標停止位置停止制御部の利用データに、勾配データ、曲率データ、トンネルデータを加えたことを特徴とする請求項5に記載の自動列車運転装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002374958A JP2004208416A (ja) | 2002-12-25 | 2002-12-25 | 自動列車運転装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002374958A JP2004208416A (ja) | 2002-12-25 | 2002-12-25 | 自動列車運転装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004208416A true JP2004208416A (ja) | 2004-07-22 |
Family
ID=32812830
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002374958A Pending JP2004208416A (ja) | 2002-12-25 | 2002-12-25 | 自動列車運転装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2004208416A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101109867B1 (ko) | 2009-01-16 | 2012-02-14 | 현대제철 주식회사 | 턴디쉬 대차 위치 제어 장치 및 그 방법 |
| JP2012105438A (ja) * | 2010-11-09 | 2012-05-31 | Toshiba Corp | 列車制御装置 |
| WO2018155489A1 (ja) * | 2017-02-21 | 2018-08-30 | 三菱重工エンジニアリング株式会社 | 車両制御装置、車両制御方法、プログラム |
| CN112572545A (zh) * | 2019-09-30 | 2021-03-30 | 比亚迪股份有限公司 | 列车停车方法、装置及计算机设备 |
-
2002
- 2002-12-25 JP JP2002374958A patent/JP2004208416A/ja active Pending
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101109867B1 (ko) | 2009-01-16 | 2012-02-14 | 현대제철 주식회사 | 턴디쉬 대차 위치 제어 장치 및 그 방법 |
| JP2012105438A (ja) * | 2010-11-09 | 2012-05-31 | Toshiba Corp | 列車制御装置 |
| WO2018155489A1 (ja) * | 2017-02-21 | 2018-08-30 | 三菱重工エンジニアリング株式会社 | 車両制御装置、車両制御方法、プログラム |
| JP2018137857A (ja) * | 2017-02-21 | 2018-08-30 | 三菱重工エンジニアリング株式会社 | 車両制御装置、車両制御方法、プログラム |
| US10844822B2 (en) | 2017-02-21 | 2020-11-24 | Mitsubishi Heavy Industries Engineering, Ltd. | Vehicle control device, vehicle control method, and program |
| CN112572545A (zh) * | 2019-09-30 | 2021-03-30 | 比亚迪股份有限公司 | 列车停车方法、装置及计算机设备 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2409484C2 (ru) | Способ и система для усовершенствования техники вождения поездов и снижения расхода топлива | |
| CN103440422B (zh) | 一种基于带时间窗的到站时间预测的公交晚点恢复方法 | |
| CN107084733B (zh) | 一种基于无人驾驶的路径规划的方法、装置及系统 | |
| CN103085816B (zh) | 一种用于无人驾驶车辆的轨迹跟踪控制方法及控制装置 | |
| US6668217B1 (en) | Method for optimizing energy in the manner in which a vehicle or train is driven using kinetic energy | |
| US11719602B2 (en) | Vehicle control system | |
| JP2010512267A (ja) | 列車または軌道データベースを増強して走行を最適化する方法、システムおよびコンピュータソフトウェアコード | |
| CN101245740A (zh) | 柴油动力系统的优化燃料效率和排放输出的系统和方法 | |
| CN104080683A (zh) | 减速因素推定装置以及驾驶辅助装置 | |
| US20230242155A1 (en) | Vehicle energy management system | |
| CN109455179A (zh) | 用于确定前有第二车辆的第一车辆要达到的速度的方法 | |
| CN104656452A (zh) | 一种基于矩阵离散算法的地铁列车优化控制方法及装置 | |
| SE540963C2 (en) | A method for determining a change in air resistance felt by a motor vehicle | |
| JP7249267B2 (ja) | 車両消費の監視システム | |
| US20200070863A1 (en) | Control system and method | |
| JP2004208416A (ja) | 自動列車運転装置 | |
| CN109923566A (zh) | 用于确定机动车辆速度曲线的方法 | |
| CN114783175A (zh) | 基于伪谱法的多信号灯路况下网联车辆节能驾驶控制方法 | |
| US20210188336A1 (en) | Vehicle control system | |
| RU2764469C1 (ru) | Система формирования корректирующего энергоэффективного трека эксплуатируемого транспортного средства | |
| RU2777852C1 (ru) | Способ формирования энергоэффективного трека эксплуатируемого транспортного средства при движении эксплуатируемого транспортного средства по участку пути, включающему точку обязательной остановки | |
| RU2777853C1 (ru) | Транспортное средство с функцией формирования энергоэффективного трека эксплуатируемого транспортного средства при движении эксплуатируемого транспортного средства по участку пути, включающему точку обязательной остановки | |
| RU2771586C1 (ru) | Транспортное средство с функцией формирования корректирующего энергоэффективного трека эксплуатируемого транспортного средства | |
| RU2771585C1 (ru) | Система формирования энергоэффективного трека эксплуатируемого транспортного средства при движении эксплуатируемого транспортного средства на участке пути в городской среде | |
| RU2766649C1 (ru) | Система формирования корректирующего энергоэффективного трека эксплуатируемого транспортного средства |