KR880000887B1 - 지엽류 회수장치 - Google Patents
지엽류 회수장치 Download PDFInfo
- Publication number
- KR880000887B1 KR880000887B1 KR1019830003569A KR830003569A KR880000887B1 KR 880000887 B1 KR880000887 B1 KR 880000887B1 KR 1019830003569 A KR1019830003569 A KR 1019830003569A KR 830003569 A KR830003569 A KR 830003569A KR 880000887 B1 KR880000887 B1 KR 880000887B1
- Authority
- KR
- South Korea
- Prior art keywords
- paper sheet
- vane
- wing
- vanes
- paper
- Prior art date
Links
Images
















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H29/00—Delivering or advancing articles from machines; Advancing articles to or into piles
- B65H29/38—Delivering or advancing articles from machines; Advancing articles to or into piles by movable piling or advancing arms, frames, plates, or like members with which the articles are maintained in face contact
- B65H29/40—Members rotated about an axis perpendicular to direction of article movement, e.g. star-wheels formed by S-shaped members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H31/00—Pile receivers
- B65H31/32—Auxiliary devices for receiving articles during removal of a completed pile
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2301/00—Handling processes for sheets or webs
- B65H2301/40—Type of handling process
- B65H2301/42—Piling, depiling, handling piles
- B65H2301/421—Forming a pile
- B65H2301/4212—Forming a pile of articles substantially horizontal
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2301/00—Handling processes for sheets or webs
- B65H2301/40—Type of handling process
- B65H2301/42—Piling, depiling, handling piles
- B65H2301/426—Forming batches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2701/00—Handled material; Storage means
- B65H2701/10—Handled articles or webs
- B65H2701/19—Specific article or web
- B65H2701/1912—Banknotes, bills and cheques or the like
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Discharge By Other Means (AREA)
- Pile Receivers (AREA)
- Forming Counted Batches (AREA)
Abstract
내용 없음.
Description
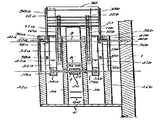
제1도는 본 발명의 지엽류 회수장치의 일 실시예를 보인 정면도.
제2도는 제1도에 도시한 정면도를 X-X 선으로 절단하여 같은 평면상에 전개시켜서 보인 화살표 방향의 단면도.
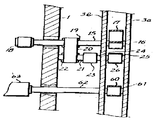
제3도는 제1도에 도시한 정면도를 Y-Y 선으로 절단해서 화살표 방향으로 보인 단면도.
제4도는 제1도를 Z-Z선으로 절단해서 화살표 방향으로 보인 단면도.
제5도는 본 발명에 관한 지엽류 회수장치의 제2의 날개의 동작궤적을 설명하기 위한 동작도.
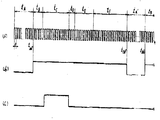
제6도는 본 발명에 관한 지엽류 회수장치의 요부의 동작상태를 설명하기 위한 타이밍도.
제7도는 본 발명에 관한 지엽류 회수장치의 동작을 분해해서 보인 정면도.
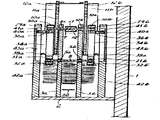
제8도는 본 발명에 관한 지엽류 회수장치의 다른 실시예를 보인 정면도.
제9도는 제8도에 도시한 정면도를 X-X 선으로 절단해서 화살표 방향으로 보인 단면도.
제10도는 제8도에 도시한 정면도를 Y-Y 선에서 절단해서 화살표 방향으로 보인 단면도이다.
* 도면의 주요부분에 대한 부호의 설명
7, 8, 9 : 축 10 : 날개차
11 : 공간 12 : 제1의 날개
14, 16, 19, 22, 25, 27, 28, 30, 32, 61 : 풀리 17, 20, 26, 34, 60 : 벨트
38 : 제2의 날개 18, 63 : 모우터
본 발명은 한장식 들여 보내어진 지엽류를 일정매수의 집적층으로 구분하여 그 집적층을 다음 다음으로 송출하는 지엽류 회수 장치에 관한 것이다.
예를 들면 은행권이나 데이터 카아드 또는 인쇄물과 같은 지엽류는 그 서류의 여러가지 처리형태를 기계화 하고 있는데, 근년 이들의 서류는 증가일로에 있기 때문에 이들을 처리하는 기계의 고속화도 절실히 요망되고 있다.
이와 같은 요구중 예를 들면 은행권과 같은 것은 보통 일정 매수 단위로 하여 테이프 등으로 결속되어 이른바 다발 상태로 보관하는 작업을 하고 있다. 이와 같은 작업에 있어서 지엽류를 일정한 매수 단위로 구분 하는 작업을 사람의 손으로 하는 것은 지극히 비능률적이다. 그러므로 통상에는 자동화된 처리 기계를 사용하여 일정 매수별로 집적층으로 구분하여 그 다음 각 집적층을 테이프로 묶고 있다. 이와 같은 자동화 기계에 있어서는 한 장식 고속으로 이송되는 지엽류의 이송을 중단하지 않고 연속적으로 집적이 가능하고, 그 집적과정 중에서 일정장수 마다의 구분되는 것이 이상적인 구분 방식으로 생각된다.
이와 같은 조건하에서 종래의 집적수단으로서는 반송부의 끝부분에서 송출시킨 지엽류가 공중을 유영하는 상태의 지엽류의 상면을 두드려서 하방으로 떨어지게 하는 이른바 비이트 방식이라 칭하는 방향변환 수단을 사용하여 집적시키는 방식이 있다. 그러나 이와 같은 집적수단에 있어서는 지엽류의 방향 변환수단의 고속응답성에 한도가 있다. 즉, 방향변환의 수단은 일정한 진폭의 폭을 고속으로 진동시키면 진동사이클이 높아지므로 관성이 커져서 변환수단의 동작이 불안전해지거나 기계부분에 걸리는 힘이 커져서 장치가 대형화하고, 구동이 잘 안되거나, 가격이 높아지는 문제점이 있다. 또 지엽류를 두드리는 힘이 크기 때문에 지엽류가 접히면서 집적되거나 찢어지는 일이 있으므로 고속화에는 좋은 집적수단잉라고는 할 수 없은 결점이 있다.
이와 같은 결점을 보완하는 집적수단으로서 날개차를 이용한 방식이 있는데, 이 방식은 회전축의 중심을 가지고, 이회전축의 중심부를 시작으로 해서 주변부에 바깥방향으로 또한 같은 방향으로 뻗는 가늘고 긴 복수개의 날개가 고정되므로 서로 인접된 날개사이에 가늘고 긴 복수줄의 날개가 고정되므로 서로 인접된 날개사이에 가늘고 긴 복수줄의 공간을 형성한 날개차의 각각의 공간에 지엽류를 들여 보내서 집적되게 하는 방식이다. 이 방식에 의하면 지엽류의 이송 수단으로의 송입속도(인출속도)를 N매/분으로 하면 반송로의 임의 지점에서 그 지엽류를 관축하면 반성되고 있는 지엽류의 선단이 통과하고 나서 다음의 지엽류의 선단이 도래할 때 까지의 시간 t는
t=60/N[sec]
가 된다. 지금 날개차의 길쭉한 공간을 m줄로 하면 공간에서 공간까지는 회전각 α로 해서
α=360/m[o]
이 된다. 따라서 반송되어온 지엽류가 차례로 날개차의 각 공간에 들어가는 데는 1줄의 공간본(360/m[o])을 60/N[sec]로 회전하고 있으면 된다. 즉 1m 회전하는 데는 60/N[sec]가 걸리고 있으므로 날개차의 회전수 n는

가 된다. 따라서 날개차의 회전수 n는 단위시간당 송입되는 지엽류의 매수를 공간수로 뺀것이 되고, 상당히 느린 회전이 된다. 예를 들면 매분 1800장의 고속반송의 경우에도 공간수를 가령 18중로 하면 날개차의 회전수는 n=100[rpm]이 되고 아무런 문제없이 회전집적이 가능하게 된다.
종래 이와같은 지엽류의 고속처리에 유리한 날개차에 의한 집적수단에 대하여 일정한 매수별로 지엽류의 반송을 중단하지 않고 구분하기 위한 수단으로서는 지엽류의 이송수단의 반송부의 끝부분과 날개차에 넘기는 공간을 반송하고 있는 지엽류 사이의 반송 데드 타임(dead time)에 날개차의 각도의 속도보다 빠른 속도로 구분수단을 통과시켜서 그 구분 수단에 의하여 날개차에서 빠져나온 지엽류를 일시적으로 받아서 집적중에 있는 지엽류의 집적층의 송출이 끝난후 구분 수단에 집적중에 있는 지엽류를 퇴적 수단으로 받아 넘기도록 하고 있다.
이와 같은 구분 수단에 있어서는 지엽류의 이송이 고속화 되면 지엽류 사이의 반송을 위한 데드 타임이 지극히 단축된다. 그러므로 이 데드 타임을 이용해서 지엽류 사이를 가로지르는 구분 수단도 더욱 고속으로 구동되는 것을 요구하게 된다. 따라서 구분 수단은 큰 관성을 받게 되므로써 상기와 같이 구분 수단의 동작이 불안정한 동작이 되기 쉽고, 다음에 이송되어 오는 종이가 도중에 걸리어서 잼(jam)등이 발생하는 결점이 있다. 또 기구 부분에 걸리는 힘도 커지게 되므로 구동 기구가 대형화 되거나 코스트가 높아지는 결점이 있다. 그러므로 고속화에 적절한 집적방식이라 하더라도 구분 수단에 무리가 있으므로 고속화를 하는데 있어 일정 매수별로 구분하는 것은 좋은 구분방식 이라고는 할 수 없고 또 채용할 수 없는 결점이 있었다.
본 발명은 이와 같은 결점을 거울 삼아 연구된 것으로 그 목적은 고속성을 잃지 않으면서 한장씩 고속으로 송입되는 지엽류를 확실하게 일정 매수의 집적층으로 구분 할 수 있는 지엽류 회수 장치를 제공하는 것이다.
본 발명에 의하면 회전축 중심을 가지고 있고 이 회전축의 중심부를 시작으로 하여 주변부에 바깥 방향으로 뻗는 복수개의 길쪽한 제1의 날개를 고정하고, 서로 인접된 각 날개 사이에는 다수의 길죽한 공간을 형성한 날개차의 측방에 임의의 한점을 상기한 날개차의 같은 축상에 위치시키고 상기한 공간과 거의 같은 형상의 지엽류를 받는 면을 가진 제2의 날개를 설치하고, 이 제2의 날개를 구분하기 위한 지엽류가 돌아오기 직전에 상기한 지엽류를 받는 면과 지엽류 이송 수단의 반송부의 끝부분이 대향 되도록 상기한 날개차의 각(角)속도와 거의 같은 각 속도로 상기한 제2의 날개를 회전시켜서 이 제2의 날개가 소정각도만 회전한 후 상기한 제2의 날개를 날개차의 중심에서 멀어지는 방향으로 이동시키는 구분 수단을 가지므로써 달성된다.
상기한 본 발명의 지엽류 회수 장치에 의하면 지엽류를 구분하는 제2의 날개가 지엽류를 회수하는 날개차의 제1의 날개와 거의 같은 각 속도로 제1의 날개와 제2의 날개의 지엽류를 받는 면의 형상이 거의 같은 형상을 가지고 회전하므로써 제2의 날개가 날개차의 일부로서 회전하는 고로 날개차가 가지는 고속집적 기능을 전혀 잃지 않고 지엽류의 정수 구분이 가능해지고, 고속성이 우수한 집적 방식과 유기적으로 결합된 정수구분 수단을 구비한 지엽류 회수 장치를 제공 할 수 있는 효과가 있다.
이하 도면을 참조하여 본 발명의 지엽류 회수 장치에 대하여 상세히 설명한다.
도면에서 부호(1)은 베이스판인데 이 베이스판(1)에는 수평으로 배치된 고정판(2)이 고정된다. 이고정판(2)에는 한 쌍의 같은 형상을 한 지지판(3a)(3b)에는 상기 베이스판(1)에 평행으로 각각 소정의 간격을 가지고 고정된다. 이 지지판(3a)(3b)에는 상기한 고정판(2)에 대하여 수직을 이루는 변을 형성하고 이 변의 하단에서 제1도의 도면상 우측으로 뻗는 수평변을 형성하는 직각 3각형을 형성하는 소망의 3점 위치에 각각 베어링(4a)(4b) 및 (5a)(5b) 및 (6a)(6b)을 통하여 각각 지지판(3a)(3b)의 양측에 같은 길이 만큼 돌출되어 관통한 축(7)(8)(9)이 회전 자유롭게 지지된다. 또 경사변의 기울기를 어떻게 결정하느냐에 대해서는 후에 상세히 기술한다.
상기한 지지판(3a)(3b)의 바깥 쪽으로 돌출한 축(7)부의 각각의 지지판(3a)(3b)에 근접한 위치에는 한쌍의 날개차(10a),(10b)가 일체적으로 고정된다. 이 날개차(10)는 예를 들면 금속제의 원판의 중심을 상기한 축(5)의 중심과 일치시켜서 고정하고 있다.
이 원판은 수치 자동제어 공작 기계를 사용해서 이 원판의 중심부를 시작으로 하여 중심에서 등거리 위치에 있는 원주상의 위치에서 같은 방향의 바깥 방향으로 뻗는 인볼류우트(involute)곡선을 그리는 공간(11)을 형성하는 제1의 날개(12)가 절삭 가공에 의하여 복수개 형성된다. 이 한쌍의 날개차(10a)(10b)의 각각의 공간은 서로 맞추어지고 있다.
그리고 상기 지지판(3a)(3b) 사이에는 풀리(14)가 축(7)에 고정되는데, 이 폴리(14)는 제4도의 도시와 같이 베이스판(1)을 관통하여 상기 지지판(3a)(3b)에 회전 자유롭게 지지된 축(15)의 지지판(3a)(3b)사이에 위치한 축부에 고정된 풀리(16)와의 사이에 벨트(17)가 걸쳐지고 있다. 이 축(15)의 베이스판(1)의 뒤쪽에 돌출된 단부에는 모우터(18)가 접속되고 있다. 상기한 축(15)에는 베이스판(1)과 지지판(3b)과의 사이에 폴리(19)가 고정되고 벨트(20)에 의하여 일단이 베이스판(1)에 회전 자유롭게 지지된 축(21)에 고정된 폴리(22)에 연결되고 있다. 축(21)의 지지판(3b)의 축단부에는 지지판 (3a)(3b)에 자유롭게 지지된 축(24)의 일단을 연결하거나, 그연결을 해제하는 클러치 기구(23)가 설치된다. 그리고 지지판(3a), (3b)사이의 축(24)에는 폴리(25)가 고정되고, 이 폴리(25)에는 벨트(26)가 상기 축(9)에 고정된 풀리(27)와의 사이에 걸쳐진다. 상기 축(9)의 양단에는 풀리(28a)(28b)가 각각 축(9)에 일체적으로 고정된다.
또, 상기한 축(7)의 양단에는 베어링(29a)(29b)을 통하여 풀리(30a)(30b)가 부착되고, 또 축(8)의 양단에도 베어링(31a)(31b)을 통하여 풀리(32a)(32b)가 부착된다. 그리고 풀리(28), (29), (32)에는 벨트(34a)(34b)가 걸쳐진다. 이풀리(29)의 축 중심은 상기 날개차의 축 중심과 일치되고, 이 폴리(29)의 축 중심(A)과 풀리(32)의 축 중심(B) 및 풀리(28)의 축 중심(C)의 3점을 연결했을때 그것은 제5도의 도시와 같이 직각 3각형을 형성하도록 각각의 풀리(29)(28)(32)를 배치하고 있다.
상기 벨트(34)의 측방에는 그 벨트의 폭방향으로 일단이 예를 들면 리벳 등으로 고정된 걸림부를 가지는 아암(36)을 가지고 있고 이 아암(36)에는 제5도에 도시한 직각3각형과 겹치는 궤적을 그리며 움직이는 1점(P)를 가진다. 그리고 상기 아암(36)의 타단에는 날개차(10)의 측방에 위치하는 제2의 날개(38a)(38b)가 고정되고, 이 제2의 날개(38)는 후에 상세히 설명하겠으나 벨트(34)의 동작에 따라 연동한다. 이 제2의 날개(38)는 후에 상세히 설명하겠으나 벨트(34)의 동작에 따라 연동한다. 이 제2의 날개(38)는 제7도 A, B 및 C에 도시한 바와 같이 아암(36)의 일점(P)와 점(A)가 겹치는 위치에 있을 때는 날개차(10)에 형성된 제1의 날개(11)와 제2의 날개(38)가 제1도의 정면에서 보았을때 각각의 날개 형상이 겹치게 되는 형상을 가지고 상기 아암(36)의 타단에 고정된다.
상기 아암(36a)(36b)에는 상기 아암(36)상의 점(P)을 중심으로 하는 핀(40a)(40b)이 각각 바깥쪽을 향해서 돌출해서 설치된다. 이 핀(40a)(40b)에는 베어링(41a)(41b)이 끼워지고 이 베어링(41)은 지지판(3a)(3b)의 바깥쪽에 이것과 평행으로 설치된 가이드 판(42a)(42b)설치된 슬롯(43a)(43b)에 끼워져 있다. 이 슬롯(43a)(43b)는 제1도의 정면에서 보았을대 상기 폴리(29)(28)(32)의 점 A, B, C를 연결한 직각 3각형과 겹치는 위치에 같은 형상으로 형성되고 이 슬롯(43a)(43b)을 따라 상기한 핀(40a)(40b)이 이동한다.
상기 날개차(10a)(10b)사이의 상부에는 반송풀리(45)의 축이 상기 날개차(10)의 바깥 윤곽에서 안쪽에 위치해서 설치된다. 상기 반송폴리(45)는 하측 반송벨트(46)를 되돌리는 반송부의 끝부분을 형성하는 폴리이고 이 벨트(46)와 지엽류(50)를 끼워 보내기 위한 상측 반송벨트(47)는 풀리(45)에서 다시 지엽류의 이송방향의 연장선상에 배치된 반송풀리(48)에 갈겨져서 되돌리게 되어 있다.
이 벨트(46)(48)이 겹쳐진 반송로(49)는 화살표(70)로 표시한 방향으로 이동하고, 그 반송장치의 끝부분이 상기 날개차(10)의 바깥 윤곽상에 위치하고, 또한 그 바깥 윤곽에 대하여 접선방향에서 지엽류가 이송되어서 반송부의 끝부분에서 방출되어 상기 공간(11)에 지엽류를 이송하기에 적합한 경사를 가지고 배치된다.
또 상시 날개차(10a)(10b)의 사이에는 날개차(10)의 하방 바깥윤곽에서 공간(11a)(11b)에 대해서 내단측을 향해서 각각의 공간에 대하여 어떤 각도를 가지고 위치하는 부분을 가지고 있고 또 상기 지지판(3a)(3b)에 끼워져 들어가도록 고정함에 따라 정지된 상태로 설치한 지엽류의 발출판(51)이 배치된다. 이 발출판(51)의 경사에 대해서는 후에 상세히 설명한다.
그리고 날개차(10)의 하방에는 날개차(10)에는 빠져나온 지엽류(50)가 퇴적하는 벨트(60)가 배치되고 이 벨트(60)가 감겨진 풀리(61)는 상기 지지판(3a)(3b)에 회전 자유롭게 지지된 축(62)에 연결된 모우터(63)를 필요에 따라 구동하므로써 화살표(75)의 방향으로 이동하고, 벨트(60)에 퇴적된 지엽류(50)의 집적층을 필요한 장소로 이동한다.
이상의 설명과 같은 구성으로된 본 발명의 지엽류 회수장치에 대하여 제6도 및 제7도를 참조하여 그 동작을 설명한다.
본 발명의 실시예에 의하면 날개차(10)에 형성된 인볼류우트 곡선형상의 공간(11)은 12줄을 가진 것을 사용했다. 지금, 지엽류(50)를 반송벨트(46)(47)로 협지하는 반송로(49)로 들여 보내는 속도(인출속도)를 1200장/분으로 하면 방송되고 있는 지엽류의 선단이 통과하고 나아서 다음 지엽류(50)의 선단이 도래할때 까지의 시간을 t1로 하면 t1=60/1200=50[msec]가 된다.
제6(a)도의 펄스 파형은 상기 지엽류(50)의 1장째 부터 N장째 까지의 송입간격을 나타내고, 펄스폭에 지엽류(50)의 이송 방향의 길이를 표시하고 있다. 날개차(10)의 공간(11)은 12줄이므로 회전각 α0=30°가 되고 각 공간(11)은 그 각도를 50msec로 이동하면 되고, 이때의 날개차(10)의 회전수n0=100[rpm]이 되어 극히 느린회전으로도 된다. 따라서 모우터(18)는 회전축(15), 풀리(16), 벨트(17), 풀리(14)를 통하여 날개차(10)를 상기의 회전수를 가지고 구동하게 된다.
제6(b)도의 도시와 같이 지엽류(50)의 반송개시 전에는 클러치 기구(23)에 의하여 회전축(21)과 (24)를 떼어 놓는다. 그리고 제2의 날개(38)를 제2의 날개의 지엽류(50)를 구분하기 위한 받는 면의 반대측 면이 상기한 벨트의 반송로(49)의 측방을 통과하기 직전의 위치에 정지시켜 놓는다. 이 상태에서는 제7(a)도의 도시와 같이 날개차(10)의 회전중심(a)과 그 축상에 임의의 1점의 기점(P)가 위치되고, 그리도 아암(36)은 회전중심(a)통과하는 수평선에 대하여 30°의 경사를 가지고 세트되도록 하고 있다.
이와 같이 세트된 상태로 모우터(18)를 구동하면 날개차(10)가 회전을 개시한다. 이 상태에서 반송벨트(46)(47)의 반송로(49)에 지엽류를 인출속도 1200장/분으로 송입된다. 반송로(49)로 부터 이송되어 온 지엽류(50)는 폴리(45)의 반송부의 끝부분 상기 공간(11)에 삽입된다. 이때 지엽류(50)는 날개차(10)의 주속을 넘는 반송속도로 상기 공간(11)을 형성하는 제1의 날개의 면과의 사이에 생기는 마찰 제동력에 의하여 지엽류(50)의 운동이 정지되도록 작용하기 때문에 공간(11)으로의 반입속도가 감속되면서 삽입되어 간다. 그리고 지엽류(50)가 공간(11)에 삽입되면서 그 지엽류(50)발출판(51)의 지점에 도달할때에는 지엽류(50)의 선단이 충분히 감소된다. 그리고 이 선단이 발출판(51)에 닿게되면 날개차(50)와 일체로 움직이는 것이 지지되기 때문에 지엽류(50)는 하방으로 낙하하여 벨트(60)에 퇴적하게 된다. 이 동작은 동작개시 직후의 1장째로 부터 정수로 구분하는 규정매수째 까지 계속하여 작동한다. 본 발명에 의하면 그 규정 매수를 100장으로 해서 설명한다. 그 100장째 까지 제7(a)도의 상태이고, 제6도(a)의 tA기간에 상당한다.
다음에 100장째의 지엽류(50)가 공간(11)으로의 삽입이 끝나게 되면 제6(b)도의 도시와 같이 클러치 기구(17)에 의하여 회전축(21)과 (24)를 연결한다. 즉101장째의 지엽류(50)가 도래하기 직전에 다음의 지엽류(50)가 송입되는 공간(11)을 형성하는 다음의 지엽류(50)가 송입되는 공간(11)을 형성하는 다음의 제1의 날개가 측방으로 위치한 시점에서 제2의 날개(38)를 구동하기 위하여 회전축(21), (24)을 연결한다. 이와 같이 축이 연결되면 제2의 날개(38)는 벨트(17), 벨트(24)를 통하여모우터(18)의 회전속도로 풀리(27)를 회전한다. 풀리(27)가 회전하면 이 풀리(27)가 고정 지지되고 있는 회전축이(9)이 회전하기 때문에 이 축(9)의 양단에 접속된 풀리(28)가 회전한다. 그리고 이 풀리(28)가 회전하면 이 풀리(28) 및(30), (32)에 지지된 벨트(34)가 구동되고, 이에 수반하여 정지된었던 제2의 날개(38)의 구동을 시작한다. 이때 풀리(30) 및(32)는 각각을 지지하고 있는 축(7) 및 (8)에는 베어링(29) 및 (31)을 통하여 지지되고 있으므로 그들의 축(7) 및 (8)에는 벨트(34)의 운동은 전달되지 않는다. 제2의 날개(38)는 날개차(10)를 구동하고 있는 모우터(18)로 구동하고 있으므로 날개차(10)의 회전방향과 같은 방향으로 또한 같은 각의 속도를 가지고 날개차(10)의 회전 중심과 일치된 회전 중심으로 형성하는 점(P)을 가진 점(P)을 중심으로 하여 제2의 날개가 회전한다.
이 상태를 제7(b)도에 도시한다. 그리고 제7(c)도의 도시와 같이 공간(11)에 5장째의 지엽류(50)가 삽입되었을때, 즉 제2의 날개(38)가 150°회전했을 때에 아암(36)은 수평이 된다. 제6(a)도의 tB기간이 그 타이밍을 나타내고 있다.
이 타이밍 tB를 경과 해서 타이밍 tC의 구간에 들어오면 제7(d)도의 도시와 같이 제2의 날개(38)는 하강을 시작한다. 즉 아암(36)상에 설정한 점(P)은 날개차(10)의 회전 중심을 형성하는 점(a)이 멀어지는 방향으로 이동한다. 즉 하향으로 하강한다. 이때 낙하중의 지엽류(50)의 퇴적이 끝났을때, 즉 본 발명에 의하면 제7(d)도에 도시한 타이밍의 106장째의 지엽류(50)가 공간(11)에 삽입되었을때, 제6(c)도의 도시와 같이 모우터(63)를 온하여 베트(60)를 화살표(75) 방향으로 구동하여 퇴적된 지엽류(50)의 100장 분을 날개차(10)의 하방위치에서 배제한다. 그리고 다시 제2의 날개(38)는 다시 하강을 계속하나 제7(e)도 및 제7(f)도의 도시와 같이 그 제2의 날개(38)는 발출판(51)에 의하여 공간(11)에서 빠져나온 지엽류(50)를 집적해서 먼저 배제시킨 100장의 지엽류(50)와는 구분된다. 그리고 다시 제2의 날개(38)가 하강을 계속해서 제7도 G의 도시와 같이 아암(36)에 설정한 점(P)가 풀리(32)의 축 중심(B)와 같은 축상에 위치하는 점까지 하강했을때, 즉 제6(a)도로 도시한 타이밍(tc)까지의 기간에 퇴적된 100장의 지엽류(50)의 배제는 끝나고, 제6(C)도의 도시와 같이 모우터(63)는 정지된다. 그와 동시에 제2의 날개(38)의 최하단은 벨트(60)의 바로 위에 위치하고 있다. 이 타이밍(tc)까지는 반송 벨트로 부터는 공간(11)에 통산해서 119장째의 지엽류(50)가 삽입된다. 그리하여 통산해서 120장째의 지엽류(50)가 이송되어 오면 제2의 날개(38)는 벨트(34)의 이동방향이 90°변경되므로이것에 수반하여 제2의 날개(38)는 점(P)을 중심으로 90°벨트(60)의 측방을 가로 질러서 회전한다. 이 제 2의 날개(38)에서 벨트(60)으로 받아 넘겨진다. 그리고 이후에 낙하되어 오는 지엽류(50)는 벨트(60)위에 다시 퇴적한다. 제7(h)도의 도시와 같이 90°회전한 제2의 날개(38)는 벨트(34)의 이동방향을 따라 수평으로 이동한다.
이와 같이 수평 이동하는 제2의 날개(38)의 아암(36)에 설정한 점(P)이 풀리(28)의 회전축 중심(C)의 동축상의 위치까지 이동하면 제2의 날개(38)는 벨트(34)의 이동방향이 풀리(30)의 방향으로 변경되므로 재차 점(P)를 중심으로 회전하는데 그 각도를 120°로 했다. 그 이유는 풀리(30)(32)및 (28)의 각각의 점을 중심으로 회전하는 각도의 합계를 360°로 함에 따라 제2의 날개(38)를 정확히 1회전시켜서 원 위치로 복귀시키게 되고 그 구동도중에 클러치 기구(23)를 단속시킬 일이 없으므로 그 제어가 용이해지기 때문이다. 따라서 이 3각형은 반드시 직각3각형이 아니더라도, 3개의 풀리를 연결해서 제2의 날개가 회동할때 그 회전 각도의 합계가 360°가 되도록 하면 좋다. 이와 같은 조건하에서 회전각도가 120°로 선택된 이유는 제7도의 도시와 같이 풀리(28)에서 반향 변환되어 풀리(30)로 향하는 제2의 날개(38)의 만곡 부분이 날개차(10)의 공간(11)부분의 측방을 통과하게 된다. 이때에 그 만곡부분이 공간(11)에 대하여 깊이 들어가서 통과하게 되면 지엽류(50)가 공간(11)에 들어갈때 얻어지는 마찰 제동력의 효과가 충분히 얻어질 수 없게 된다. 이 제동력이 작용하지 않고 지엽류(50)가 공간(11)내에 삽입되면 고속으로 발출판(51)에 충돌하게 되므로 지엽류(50)의 선단이 꺽어어질 염려가 있다. 특히 빳빳하지 못한 지엽류(50)에 대해서는 이 문제가 크다.
따라서 이 경사변을 형성하는 벨트 부분의 경사도는 제2의 날개(38)의 만곡부분이 공간(11)을 될수 있는 대로 얕게 통과하도록 풀러(28)의 위치를 결정하는 것이 좋고, 본 실시예에서는 저변과 경사변과의 각도를 60°로 했다. 그리고 제2의 날개(38)의 아암(34)에 설정한 점(P)가 점(A)의 위치로 되돌아간 곳에서 클러치 기구(23)로 회전축(21)과 (24)를 격리하여 제2의 날개(38)의 구동을 정지한다. 제7(k)도는 그 상태를 도시한것이며, 통산해서 150장째의 지엽류(50)가 공간(11)에 삽입되었을 때 제6(b)도의 도시와 같이 클러치 기구(23)도 그 타이밍으로 해제된다. 또 t0는 제2의 날개(38)가 90°회전하고 있을 때이고, tE는 수평이동하고 있을때 이며, tF는 제2의 날개가 120°회전하여 원위치까지 되돌아온 타이밍이고, 이동안 제2의 날개(38)는 연속 구동되고 있으며, 클러치 기구(23)는 전혀 그 구동상태를 절환하지 않고 있다. 그리도 통산해서 151장-200장 까지의 타이밍 tA에서는 제2의 날개(38)는 전혀 동작하지 않고 또 201장째가 도래하는 직전에 재차 클러치 기구(23)에 의하여 회전축(21)과 (24)가 연결되어서 제6(a)도의 타이밍 tB에서 tA로 설명한 동작을 이후에 연속적으로 이송되어 오는 지엽류(50)에 대하여 반복해서 100장 단위로 구분해서 회수한다.
또, 본 발명에 의하면 50장째에서 제2의 날개를 원위치로 복귀하도록 설계하고 있으나, 그 수는 100장 이내이면 몇장이라도 설정 할 수 있는 것을 용이한 일이다.
다음에 제8도 내지 제9도를 참조하여 본 발명의 다른 실시예를 설정한다. 즉 제1도의 일실시예의 지엽류 회수장치에 의하면 제2의 날개를 1쌍의 날개차의 바깥쪽에 배설한 에에 대하여 설명 했으나 다른 실시예에 의하면 제2의 날개를 1쌍의 날개차 사이에 배설한 예로서 이것에 의해 폭이 좁은 지엽류라도 구분 접적이 가능해진다.
즉, (101)은 베이스판 인데 이 베이스판(101)에는 수평으로 배치된 고정찬(102)이 고정된다. 이 고정판(102)에는 4장의 같은 형상을 한 지지판(103a)(103b)(103c)(103d)이 상기한 베이스판(101)에 평행으로 각각 소정의 간격을 두고 고정된다. 지지판(103c)(103d)에는 상기 고정판(102)에 대하여 수직 방향으로 뻗는 변을 형성하고, 이 변의 하단에서 제8도 도면상 우측으로 뻗는 수평변을 형성하는 직각 3각형을 형성하는 소망의 3점의 위치에 각각 베어링(104a)(104b)및 (105b)(105b)및 (106a)(106b)(도시생략)을 통하여 지지판(103c)측으로 부터 지지판(103b)측을 향해서 같은 길이로 돌출해서 지지된 축(107)(108)(도시생략), (109)이 회전 자유롭게 지지되고 있다. 그리고 상기한 지지판(103a)(104b)에는 상기 축(107)의 같은 축의 위치에 베어링(104c)(104d)을 통하여 상기한 축(107)방향으로 돌출한 축(107')이 회전 자유롭게 지지된다, 이들의 축(107)(107')에는 1쌍의 날개차(110a)(110b)가 제9도의 도시와 같은 위치에 일체적으로 고정된다.
이 날개차(110)는 예를 들면 금속제의 원판 중심을 상기한 축(107)(107')의 축심과 일치시켜서 공정한다. 이 날개차(110)는 일 일실시예에서 설명한 날개차(10)와 같은 형상의 인볼류우트 곡선을 그리는 공간(111)을 형성하는 제1의 날개(112)가 복수개 형성된다. 이 1쌍의 날개차(110a)(110b)의 각각의 공간은 서로 맞추어지고 있다. 그리고 상기 지지판(103a)(103b)의 사이 및(103c)(103d)의 사이에는 풀리(114a)(114b)는 제10도의 축(107) 및(107')에 고정된다. 이 풀리(114a)(114b)는 제10도의 도시와 같이 베이스판(101)을 관통해서 상기 각 지지군(103)에 회전 자유롭게 지지된 축(115)의 지지판(103a)과 (103b)와의 사이 및 (103c)와(103d)와의 사이에 위치한 각각의 축으로 고정된 풀리(116a)(16b)와의 사이에 벨트(117a)(117b)가 걸쳐져 있다. 이 축(115)의 베이스판(1)의 뒤쪽에 돌출한 단부에는 구동원인 모우터)(118)가 접속된다.
상기 축(115)에는 지지판(103c)과 지지판(103b)과의 사이에는 풀리(119)가 고정되고 벨트(120)에 의하여 일단이 지지판(103c) 및 (103b)과의 사이, 이들의 판에 평행으로 설치된 가이드판(142)에 회전 자유롭게 지지된 축(121)에 고정된 풀리(122)에 연결된다.
축(121)의 지지판(103c)측 단부에는 지지판(103c)(103d) 및 베이스판(101)에 회전 자유롭게 지지된 축(124)의 일단을 연결하거나, 그 연결을 해제하는 클러치 기구(123)가 설치된다. 그리고 지지판(103c)(103d)사이의 축(124)에는 풀리(125)가 고정되고, 이 풀리(125)에는 벨트(126)가 상기한 축(109)에 고정된 풀리(127)와의 사이에 걸쳐진다. 상기한 축(109)의 돌출단부에는 풀리(128)가 축(109)에 일체적으로고정된다.'
또 상기한 축(107)의 돌출단부에는 베어링(129)을 통하여 풀리(130)가 부착되고, 또 도시를 생략한 축(108)의 양단에도 도시를 생략한 베어링(131)을 통하여풀리(132)가 부착된다. 그리고 풀리(128), (129), (132)에는 벨트(134)가 걸쳐진다. 이 풀리(129)의 중심은 상기한 날개차의 축중심과 일치하고, 이 풀리(129)의 축 중심(A)과 풀리(132)의 축중심(B) 및 풀리(128)의 축심(C)의 3점을 연결했을때 제5도의 도시와 같이 직각 3각형을 형성하도록 각각의 풀리(129)(128)(132)를 배치하고 있다.
상기 축(107)(108)(109)의 돌출단부측의 벨트(134)의 측방에는 그 벨트의 폭방향으로 일단이 예를 들면 리벳 등으로 고정된 아암(136)을 가지고 있고 이 아암(136)에는 제5도에 도시한 직각 3각형과 겹쳐지는 궤적을 그리면서 작동하는 임의의 일점(P)를 설정하고 있다. 그리고 상기 아암(136)의 타단에는 날개차(11)의 축방에 위치하는 제2의 날개(138)가 고정되고, 이 제2의 날개(138)는 후에 상세히 설명하겠으나, 벨트(134)의 움직임에 따라 연동한다. 이 제2의 날개(138)는 상기와 같이 아암(136)의 일점(P)과 점(A)가 겹치는 위치 즉 제2의 날개(138)가 풀리(129) 및 날개차(110)와 같은 축상의 위치에 있을때는 날개차(110)에 형성된 제1의 날개(112)가 제1도의 정면에서 보았을때 각각의 날개형상의 겹쳐지는 형상으로 상기한 아암(136)의 타단에 고정된다.
상기 아암(136)에는 그 아암(136)위의 점(P)를 축심으로 하는 핀(140)이 지지판(103b)측으로 돌출되어 설치된다. 이 핀(140)에는 베어링(141)이 끼워지고, 이 베어링(141)이 지지판(103b)과의 사이에 평행으로 설치된 가이드 판(142)에 형성된 슬롯(143)에 끼워진다. 이 슬롯(143)은 제5도의 도시와 같은 상기 풀리(129)(128)(132)의 지점(A),(B),(C)을 연결한 직각 3각형을 형성하는 위치에 설치되고 이 슬롯(143)을 따라 상기 핀(140)이 이동한다.
상기 날개차(110)의 바깥쪽의 상부에는 반송 풀리(145)의 축이 상기 날개차(110)의 바깥윤곽에서 안쪽으로 위치하여 설치된다. 상기 반송풀리(145)는 하측반송 벨트(146)가 되돌아가는 반송부의 끝부분을 형성하는 풀리이고 이 벨트(146)와 지엽류(150)를 잡고 보내기 위한 상측반송 벨트(147)는 풀리(146)보다 더욱 지엽류의 이송방향의 연장된 위치에 배치된 반송풀리(148)에 감겨져서 되돌아 오게된다. 이 벨트(146)(147)이 겹쳐진 반송로(149)는 반부의 끝부분이 상기 날개차(110)의 바깥 윤곽위에 위치하고, 또 이 바깥 윤곽에 대하여 절반송로(149)는 반부의 끝부분이 상기 날개차(110)의 바깥 윤곽위에 위치하고, 또 이 바깥 윤곽에 대하여 절선(Y-Y) 방향으로 부터 지엽류가 이송되어 반송부 끝에서 방출되어 상기한 공간(11)에 지엽류를 들여 보내도록 경사를 가지고 배치되고, (155)는 지엽류(150)의 통과를 검출하는 검지기이다.
또, 상기 날개차(110a)(110b)의 사이에는 날개차(110)로 하방바깥 윤곽에서 공간(111a)(111b)에 대하여 내단측을 향해서 각각의 공간에 일실시예에서 설명한 경서를 가지고 위치하는 부분이 있고, 또 상기 지지판 가이드판(142)과 지지판(103c)과의 사이에 까워지도록 고정하므로써 고정적으로 형성한 지엽류의 발출판(151)이 배치된다.
그리고, 날개차(110)의 하방에는 그 날개차(110)로 부터 빠져 나온 지엽류(151)를 퇴적하는 벨트(160)가 배치되고, 이 벨트(160)가 감겨진 풀리(161)는 상기한 지지판(103a)(103b)(103c)(103d)에 회전 자유롭게 지지된 축(162)에 연결된 모우터(163)를 필요에 따라 구동하므로써 벨트(160)에 퇴적된 지엽류(150)를 필요한 장소에 이동한다.
이상의 설명과 같은 구성을 가진 본 실시예는 제1도 내지 제7도를 보면서 설명한 앞의 실시예와 다른 것이 없으므로, 구성의 설명한 그 구성에 따르는 작용의 설명은 생략한다.
다음에 본 발명에 관한 지엽류 회수장치의 변형예를 차례로 설명한다.
(1): 본 발명에 있어서 가장 중요한 변형에는 제2의 날개의 구조와 구동 방식이다. 이 제2의 날개의 구조는 날개차에 형성되는 공간을 형성하는 제1의 날개의 형상으로 정해진다. 따라서 제1의 날개의 형상의 변형에에 대하여 설명한다. 즉 제1의 날개는 본 발명의 실시예에 의하면 인볼류우트 곡선을 가진 것으로 설명했으나 호형의 형상을 가진 것이면 원호, 사이클로이드 곡선, 나선과 같은 곡선군이라도 좋다.
이와 같은 곡선을 이용하는 이유로서 고속집적하는 경우에 공간에 들여보내는 지엽류의 반송속도를 감속시키는제 따하 비교적 빳빳하지 못한 지엽류라도 그 고속집적을 가능하게 하기 때문이다. 이에 대하여 비교적 빳빳한 지엽류를 집적하는 경우에는 반드시 공간내에서 지엽류를 감속하면서 들여보낼 필요는 없으므로 그 공간을 형성하는 제1의 날개의 형상은 상기한 바와 같은 호형의 형상을 가질 필요는 없고 직선이라도 좋다. 이와같이 날개차의 제1의 날개의 형상에 영향을 받는 제2의 날개는 제1의 날개의 폭보다 다소 굵어도 가늘어도 좋다. 제2의 날개가 제1의 날개와 같은 각도의 속도로 회전하고 있을 때에 지엽류가 반입되는 공간이 막히지 않도록 주의해서 결정한면 된다.
(2) : 제2의 날개의 구동방식에 대하여는 벨트구성에 한정되는 것이 아니고 본 발명의 기술 사상을 달성하는 구동방식이면 스텝핑 모우터와 리니어 모우터와의 절충식, 체인 구동 등을 사용한 방식등 어느 방식도 좋다. 즉, 본 발명에 의하면 제2의 날개는 날개차와 같은 각도의 속도로 회전시키고, 또한 제2의 날개가 소정 각도로 회전한후는 제2의 날개를 날개차로 부터 멀어지는 방향으로 이동 가능하게 하므로써 뒤에서 계속 들어오는 지엽류를 제2의 날개로 일시적으로 집적하는 구동방식의 것이면 모두 본 발명의 변형에 해당되는 것은 물론이다.
또, 제2의 날개는 본 발명의 실시예에서 설명한 3각형의 구동 궤적에 한정되는 것이 아니고, 예를 들면 동작도에서 도시한 제7h도까지 이동한 후의 제2의 날개를 수평으로 이동시키지 않고 그대로 상방으로 이동시키는 상하 작동방식의 구동 궤적을 취하고록 하여 제2의 날개를 원위치로 되돌아가게 해도 된다.
(3) : 다음에 제2의 날개에 집적된 지엽류를 퇴적수단으로 받아 넘기는 타이밍에 대해서는 본 발명에 의하면 제2의 날개를 회전시키므로써 퇴적수단에 제2의 날개에 집적한 지엽류르 받아 넘기고 있으나 제2의 날개를 퇴적수단의 측방을 그 수단의 받는 면에서 더욱 깊이 하강시켜서 제2의 날개에 집적된 지엽류를 완전히 받아 넘기도록 해도 된다.
(4) : 날개차와 제2의 날개의 사용매수는 지엽류의 폭에 따라 결정되는 것으로 최고 2장에 한정되는 것은 아니다.
(5) : 또 날개차는 반드시 원판을 절삭 가공해서 제작한 것에 한정되는 것이 아니고, 날개만을 별개의 부품으로 제작하여 이것을 원판의 주위에 고정하여 공간을 가진 날개차로 형성해도 무방하다.
Claims (11)
- 회전축(7)을 가지고 있고 이회전축(7)의 주변부에서 바깥 방향으로 뻗는 복수개의 제1의 날개(12)를 가진 날개차(10)와 상기 제1의 날개(12)사이에 형성된 공간(11)에 지엽류(10)의 주변속도를 넘는 속도로 들여 보내는 지엽류(50)의 이송수단(45, 46, 47, 48, 49)과, 상기 지엽류(50)의 측방에 설치된 상기 공간(11)에 들여 보내진 지엽류(50)를 빼내기 위한 수단과, 상기 날개차(10)로 부터 빼낸 지엽류의 퇴적수단(60)과, 상기 제1의 날개(12)와 거의 같은 형상의 제2의 날개(38)와, 이 제2의 날개(38)를 상기 제1의 날개(12)의 측방에 서로 맞추어지게 해서 배치될때 상기 날개차(10)와 같은 축에서 회전 가능하도록 회전중심을 형성해서 지지하는 수단(40, 41)과 이수단에 의하여 지지된 제2의 날개(38)를 구분할 지엽류(50)가 도래하는 직전에는 그 지엽류가 다음에 들여 보내지는 공간(11)을 형성하는 제1의 날개(12)과 같은 각도의 속도로 동기해서 회전하고, 소정 각도로 회전한 후 상기 날개차(10)의 회전축(7)에서 멀어지는 방향으로 이동시키는 수단(28, 29, 30, 31, 32, 34)을 구비해서된 것을 특징으로 하는 지엽류 회수장치.
- 제1항에 있어서, 상기 날개차(10)는 1쌍이 있고, 각각의 상대를 이루는 공간(11)을 서로 맞추어지게 하고 또 상기 회전축 중심을 일치시켜서 지지되고 있는 것을 특징으로 하는 지엽류 회수 장치.
- 회전축(7)을 가지고 있고 이 회전축의 주변부에서 바깥 방향으로 호상(弧狀)의 형상으로 뻗는 복수개의 제1의 날개(12)를 가진 날개차(10)와 상기 제1의 날개(12)사이에 형성된 공간(11)에 이 공간이 형성하는 바깥윤곽의 접선 방향으로 상기 날개차(10)의 주변속도를 넘는 속도로 지엽류(50)를 들여보내서 이 지엽류의 표면과 상기 공간(11)의 외면과의 사이에 생기는 마찰제 동력에 의하여 상기 지엽류의 운동이 정지되는 속도로 작동하는 이송수단(45, 46, 47, 48, 49)과, 상기 날개차(10)의 측방에 상기 공간에 대하여 어떤 각도를 가지고 상기 날개차의 주변에서 상기 공간(11)의 내단측을 하여 고정 설치된 지엽류를 빼내기 위한 수단(51)과, 상기 날개차(10)와 같은 축에서 회전 가능한 회전중심을 형성하여 지지하는 수단(40, 41)과, 이 수단에 의하여 지지된 제2의 날개(38)를 구분할 지엽류가 도래하는 직전에는 그 지엽류가 다음에 송입되는 공간(11)을 형성하는 제1의 날개(12)와 같은 속도로 동기해서 회전하고, 소정각도로 회전한 후 상기 날개차(10)의 회전축에서 멀어지는 방향으로 이동시키는 수단(28, 29, 30, 31, 32, 34)을 구비하여된 것을 특징으로 하는 지엽류 회수장치.
- 제3항에 있어서, 상기 날개차(10)는 한쌍이고, 각각의 상대되는 공간(11)을 서로 맞추어지게 하고, 또 상기 회전축 중심을 일치시켜서 지지되고 있는 것을 특징으로 하는 지엽류 회수 장치.
- 제1항에 있어서, 상기 제2의 날개(38)는 상기 날개차(10)의 제1의 날개(12)와 거의 같은 형상으로 된 것을 특징으로 하는 지엽류 회수 장치.
- 제1항에 있어서, 상기 제2의 날개(38)는 이 날개가 구분할 지엽류가 도래하기 전에는 제2의 날개(38)의 상기 받는면의 반대측면이 지엽류(50)의 송입개시 직전의 위치에서 정지하여 대기하는 기구로 구동하는 것을 특징으로 하는 지엽류 회수장치.
- 제1항에 있어서, 상기 제2의 날개(38)는 상기 날개차(10)의 회전 중심에서 멀어지는 방향으로 이동시켜서 상기 퇴적 수단(60)의 측방 또는 그 바로 위에까지 이동시켰을때 그 이동을 정지시키고, 그 위치에서 상기 제2의 날개(38)의 중심점을 중심으로 상기 날개차(10)의 회전 방향과 같은 방향으로 소정의 각도 만큼 회전시키므로써 일시적으로 구분집적된 지엽류(50)를 상기 퇴적수단(60)에 받아 넘기고, 받아넘긴 후의 제2의 날개(38)는 그 회전 중심을 상기 퇴적수단(60)의 지엽류의 받는 면과 거의 평행을 이룬 면위를 상기한 지엽류로 부터 멀어져 가는 방향으로 바라는 거리만큼 이동시키고, 다음에 제2의 날개(38)의 회전 중심을 상기 날개차(10)의 회전 중심과 일치시키는 방향으로 이동시키는 즉 그 회전중심이 거의 직각 3각형의 궤적을 그리면서 이동하도록 형성하여서된 것을 특징으로 하는 지엽류 회수 장치.
- 제7항에 있어서, 상기 직각 3각형의 궤적을 그리며 이동하는 상기 제2의 날개(38)는 그 일단이 무단벨트(34)에 고정되고 그 벨트(34)에 의하여 구동되는 것을 특징으로 하는 지엽류 회수 장치.
- 제3항에 있어서, 상기 제2의 날개(38)는 상기 날개차(10)의 제1의 날개(12)와 거의 같은 형상으로 된 것을 특징으로 하는 지엽류 회수 장치.
- 제3항에 있어서, 상기 제2의 날개(38)는 이 날개가 구분할 지엽류가 도래하기 전에는 제2의 날개(38)의 상기 받는 면의 반대측면이 지엽류(50)의 송입개시 직전의 위치에서 정지하여 대기하는 기구로 구동하는 것을 특징으로 하는 지엽류 회수 장치.
- 제3항에 있어서, 상기 제2의 날개(38)는 상기 날개차(10)의 회전 중심에서 멀어지는 방향으로 이동 시켜서 상기 퇴적수단(60)의 측방 또는 그 바로 위에까지 이동시켰을때 그 이동을 정지시키고, 그 위치에서 상기 제2의 날기(38)의 중심점을 중심으로 상기 날개차(10)의 회전 방향과 같은 방향으로 소정의 각도 만큼 회전시키므로써 일시적으로 구분집적된 지엽류(50)를 상기 퇴적 수단(60)에 받아넘기고, 받아넘긴 후의 제2의 날개(38)는 그 회전 중심을 상기 퇴적수단(60)의 지엽류의 받는 면과 거의 평행을 이룬 면위를 상기한 지엽류로 부터 멀어져 가는 방향으로 바라는 거리 만큼 이동시키고, 다음에 제2의 날개(38)의 회전 중심을 상기 날개차(10)의 회전 중심과 일치시키는 방향으로 이동시키는 즉 그 회전 중심이 거의 직각 3각형의 궤적을 그리면서 이동하도록 형성하여서된 것을 특징으로 하는 지엽류 회수 장치.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP57-152552 | 1982-09-03 | ||
| JP57152552A JPS5943762A (ja) | 1982-09-03 | 1982-09-03 | 紙葉類回収装置 |
| JP152552 | 1982-09-03 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR840006426A KR840006426A (ko) | 1984-11-29 |
| KR880000887B1 true KR880000887B1 (ko) | 1988-05-30 |
Family
ID=15542954
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1019830003569A KR880000887B1 (ko) | 1982-09-03 | 1983-07-30 | 지엽류 회수장치 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US4603849A (ko) |
| EP (1) | EP0102814B1 (ko) |
| JP (1) | JPS5943762A (ko) |
| KR (1) | KR880000887B1 (ko) |
| AU (1) | AU544442B2 (ko) |
| CA (1) | CA1213296A (ko) |
| DE (1) | DE3372852D1 (ko) |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59172354A (ja) * | 1983-03-16 | 1984-09-29 | Toshiba Corp | 紙葉類回収装置 |
| JPS59182156A (ja) * | 1983-03-31 | 1984-10-16 | Toshiba Corp | 紙葉類回収装置 |
| JPS59223650A (ja) * | 1983-05-31 | 1984-12-15 | Toshiba Corp | 紙葉類の集積装置 |
| JPS62153250U (ko) * | 1986-03-18 | 1987-09-29 | ||
| CA1333180C (en) * | 1988-06-02 | 1994-11-22 | James E. Hertel | Apparatus and method for stacking |
| EP0561100A1 (en) * | 1992-03-20 | 1993-09-22 | FIN-OMET S.r.l. | Device for storing sheets in piles having a preset number of elements |
| DE19626577C2 (de) * | 1996-07-02 | 1999-03-18 | Eastman Kodak Co | Vorrichtung zum stapelweisen Ablegen und Ausrichten von einzeln zugeführten Blättern |
| JP4497657B2 (ja) * | 2000-05-19 | 2010-07-07 | 株式会社ミヤコシ | 枚葉紙の区分けセット出し装置 |
| US6832886B2 (en) | 2001-07-27 | 2004-12-21 | C. G. Bretting Manufacturing Co., Inc. | Apparatus and method for stacking sheets discharged from a starwheel assembly |
| US7470102B2 (en) * | 2001-07-27 | 2008-12-30 | C.G. Bretting Manufacturing Co., Inc. | Apparatus and method for insertion of separating means into a forming stack of sheets discharged from a starwheel assembly |
| DE10234970B4 (de) * | 2002-07-31 | 2005-04-28 | Giesecke & Devrient Gmbh | Verfahren und Vorrichtung zum Stapeln von Blattgut |
| US6877740B2 (en) | 2003-07-30 | 2005-04-12 | C.G. Bretting Manufacturing Company, Inc. | Starwheel feed apparatus and method |
| KR100608078B1 (ko) * | 2004-07-16 | 2006-08-08 | 엘지엔시스(주) | 매체자동지급기 |
| JP2007058764A (ja) * | 2005-08-26 | 2007-03-08 | Toshiba Corp | 紙葉類集積装置 |
| WO2010112794A1 (en) * | 2009-04-02 | 2010-10-07 | De La Rue International Limited | Apparatus and method for forming and strapping stacks of sheet documents |
| US8322721B2 (en) * | 2009-10-30 | 2012-12-04 | Ncr Corporation | Media dispenser |
| DE102010036627B4 (de) | 2010-07-26 | 2013-01-17 | Schott Ag | Verfahren und Vorrichtung zum Korrosionsschutz von Elektroden bei der Temperaturbeeinflussung einer Glasschmelze |
| CN103400442B (zh) * | 2013-08-05 | 2015-11-25 | 广州广电运通金融电子股份有限公司 | 金融自助设备及其叶轮式纸币分离装置 |
| JP6611644B2 (ja) * | 2016-03-18 | 2019-11-27 | グローリー株式会社 | 紙葉類集積機構及び紙葉類処理装置 |
| JP7459566B2 (ja) * | 2020-03-05 | 2024-04-02 | 株式会社リコー | 媒体積載装置及び画像形成システム |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE1079078B (de) * | 1957-11-19 | 1960-04-07 | Winkler Fallert & Co Maschf | Paketausleger mit Auslegesternen zum Auslegen von gefalzten oder ungefalzten Papierbogen in Paketen |
| GB2059391B (en) * | 1979-09-25 | 1983-06-22 | Laurel Bank Machine Co | Stacking paper sheets bank notes in dispensers |
| JPS5751643A (en) * | 1980-09-11 | 1982-03-26 | Laurel Bank Mach Co Ltd | Paper money accumulating apparatus |
| JPS57138847U (ko) * | 1981-02-24 | 1982-08-30 | ||
| JPS57141354A (en) * | 1981-02-25 | 1982-09-01 | Toshiba Corp | Accumulation device for paper leaf |
-
1982
- 1982-09-03 JP JP57152552A patent/JPS5943762A/ja active Granted
-
1983
- 1983-07-30 KR KR1019830003569A patent/KR880000887B1/ko not_active IP Right Cessation
- 1983-08-24 US US06/526,137 patent/US4603849A/en not_active Expired - Fee Related
- 1983-08-24 AU AU18377/83A patent/AU544442B2/en not_active Ceased
- 1983-08-25 DE DE8383304915T patent/DE3372852D1/de not_active Expired
- 1983-08-25 EP EP83304915A patent/EP0102814B1/en not_active Expired
-
1984
- 1984-05-18 CA CA000454750A patent/CA1213296A/en not_active Expired
Also Published As
| Publication number | Publication date |
|---|---|
| KR840006426A (ko) | 1984-11-29 |
| EP0102814B1 (en) | 1987-08-05 |
| EP0102814A3 (en) | 1985-05-22 |
| US4603849A (en) | 1986-08-05 |
| EP0102814A2 (en) | 1984-03-14 |
| CA1213296A (en) | 1986-10-28 |
| AU544442B2 (en) | 1985-05-30 |
| DE3372852D1 (en) | 1987-09-10 |
| JPS5943762A (ja) | 1984-03-10 |
| JPS6334102B2 (ko) | 1988-07-08 |
| AU1837783A (en) | 1984-03-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR880000887B1 (ko) | 지엽류 회수장치 | |
| EP0121409B1 (en) | Stacking apparatus for paper sheets | |
| US4088314A (en) | Synchronous stacking device | |
| US6112880A (en) | Device for forming lots of products and separating said lots from each other and, conversely, packing them | |
| EP0119814B1 (en) | Stacking apparatus for paper sheets | |
| US5083769A (en) | Dual collating machine | |
| EP0548216B1 (en) | Rotary stacker | |
| JP2509304B2 (ja) | 折丁の取集め積重ね装置 | |
| US3531108A (en) | Document stacker and/or sorter | |
| KR900000787B1 (ko) | 종이의 집적장치 | |
| US4228997A (en) | Stacking machine | |
| US4120491A (en) | Sheet stacking apparatus | |
| US4621966A (en) | Shingle compensating device | |
| US4569622A (en) | Apparatus for depositing sheets in a pile | |
| US6623001B2 (en) | Sheet stacking apparatus and method for controlling the feed of sheet material into a stacking wheel | |
| US3847384A (en) | Apparatus for collating sheet like elements | |
| CA2169445A1 (en) | Method and apparatus for shingling documents | |
| CA1215401A (en) | Stacker for flat objects | |
| US3452628A (en) | Hole punching machine for paper sheets | |
| KR101056503B1 (ko) | 인쇄물 추출장치 및 스택커 번들러 | |
| US4494646A (en) | Apparatus for loosening an imbricated formation of printed products or the like | |
| US3533620A (en) | Device for selecting and stacking documents such as punched cards | |
| WO1995013236A1 (en) | Remittance processing apparatus and method | |
| US4254859A (en) | Circular mail singulator | |
| JPS60157450A (ja) | 紙葉類回収装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| G160 | Decision to publish patent application | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| FPAY | Annual fee payment |
Payment date: 19930517 Year of fee payment: 6 |
|
| LAPS | Lapse due to unpaid annual fee |