KR20190130007A - 산업 로봇 아암에 대한 부착을 위한 공급 파이프 및/또는 공급 라인을 위한 부착 장치 - Google Patents
산업 로봇 아암에 대한 부착을 위한 공급 파이프 및/또는 공급 라인을 위한 부착 장치 Download PDFInfo
- Publication number
- KR20190130007A KR20190130007A KR1020197031795A KR20197031795A KR20190130007A KR 20190130007 A KR20190130007 A KR 20190130007A KR 1020197031795 A KR1020197031795 A KR 1020197031795A KR 20197031795 A KR20197031795 A KR 20197031795A KR 20190130007 A KR20190130007 A KR 20190130007A
- Authority
- KR
- South Korea
- Prior art keywords
- holder
- robot arm
- industrial robot
- fastening device
- fastening
- Prior art date
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0025—Means for supplying energy to the end effector
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0075—Means for protecting the manipulator from its environment or vice versa
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16L—PIPES; JOINTS OR FITTINGS FOR PIPES; SUPPORTS FOR PIPES, CABLES OR PROTECTIVE TUBING; MEANS FOR THERMAL INSULATION IN GENERAL
- F16L3/00—Supports for pipes, cables or protective tubing, e.g. hangers, holders, clamps, cleats, clips, brackets
- F16L3/01—Supports for pipes, cables or protective tubing, e.g. hangers, holders, clamps, cleats, clips, brackets for supporting or guiding the pipes, cables or protective tubing, between relatively movable points, e.g. movable channels
- F16L3/015—Supports for pipes, cables or protective tubing, e.g. hangers, holders, clamps, cleats, clips, brackets for supporting or guiding the pipes, cables or protective tubing, between relatively movable points, e.g. movable channels using articulated- or supple-guiding elements
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16L—PIPES; JOINTS OR FITTINGS FOR PIPES; SUPPORTS FOR PIPES, CABLES OR PROTECTIVE TUBING; MEANS FOR THERMAL INSULATION IN GENERAL
- F16L3/00—Supports for pipes, cables or protective tubing, e.g. hangers, holders, clamps, cleats, clips, brackets
- F16L3/08—Supports for pipes, cables or protective tubing, e.g. hangers, holders, clamps, cleats, clips, brackets substantially surrounding the pipe, cable or protective tubing
- F16L3/10—Supports for pipes, cables or protective tubing, e.g. hangers, holders, clamps, cleats, clips, brackets substantially surrounding the pipe, cable or protective tubing divided, i.e. with two or more members engaging the pipe, cable or protective tubing
- F16L3/1091—Supports for pipes, cables or protective tubing, e.g. hangers, holders, clamps, cleats, clips, brackets substantially surrounding the pipe, cable or protective tubing divided, i.e. with two or more members engaging the pipe, cable or protective tubing with two members, the two members being fixed to each other with fastening members on each side
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16L—PIPES; JOINTS OR FITTINGS FOR PIPES; SUPPORTS FOR PIPES, CABLES OR PROTECTIVE TUBING; MEANS FOR THERMAL INSULATION IN GENERAL
- F16L3/00—Supports for pipes, cables or protective tubing, e.g. hangers, holders, clamps, cleats, clips, brackets
- F16L3/16—Supports for pipes, cables or protective tubing, e.g. hangers, holders, clamps, cleats, clips, brackets with special provision allowing movement of the pipe
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16L—PIPES; JOINTS OR FITTINGS FOR PIPES; SUPPORTS FOR PIPES, CABLES OR PROTECTIVE TUBING; MEANS FOR THERMAL INSULATION IN GENERAL
- F16L33/00—Arrangements for connecting hoses to rigid members; Rigid hose connectors, i.e. single members engaging both hoses
- F16L33/02—Hose-clips
- F16L33/03—Self-locking elastic clips
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16L—PIPES; JOINTS OR FITTINGS FOR PIPES; SUPPORTS FOR PIPES, CABLES OR PROTECTIVE TUBING; MEANS FOR THERMAL INSULATION IN GENERAL
- F16L33/00—Arrangements for connecting hoses to rigid members; Rigid hose connectors, i.e. single members engaging both hoses
- F16L33/02—Hose-clips
- F16L33/035—Hose-clips fixed by means of teeth or hooks
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Robotics (AREA)
- Supports For Pipes And Cables (AREA)
- Manipulator (AREA)
Abstract
본 발명은 홀더(103), 공급 파이프(113) 및/또는 공급 라인을 위한 관련 홀더 유닛(111) 및 폐쇄 가능한 클램핑 요소(105)를 갖는, 산업 로봇 아암(121)에 대한 부착을 위한 적어도 하나의 공급 파이프(113) 및/또는 적어도 하나의 공급 라인용 부착 장치(101)에 관한 것으로, 홀더(103)는 산업 로봇 아암 주위에 클램핑 요소(105)를 클램핑 및 폐쇄함으로써 유연한 방식으로 홀더(103)가 산업 로봇 아암(121)에 부착 및/또는 그 위에 위치되도록 폐쇄 가능한 클램핑 요소(105) 상에 배열된다. 이러한 방식으로, 홀더(103)를 관련 보유 유닛(111)에 연결하는 경우, 공급 파이프(113) 및/또는 공급 라인은 목표된 방식으로 배향될 수 있다.
Description
본 발명은 산업 로봇 아암에 대한 체결을 위한 공급 호스 및/또는 공급 라인을 위한 체결 장치에 관한 것이다.
산업 로봇 아암은 산업적 제조에 사용되며 그 동작을 위해 전력, 미디어 및/또는 데이터의 공급이 필요하다. 이를 위해, 일반적으로 대응 호스 및/또는 제어 및 전력 케이블이 중앙 공급 유닛에서 산업 로봇 아암으로 안내된다. 예를 들어, 공기 호스와 같은 이러한 케이블과 호스는 개별적으로 또는 유연한 공급 호스 내에서 다발로 로봇 아암을 따라 안내된다.
통상적으로, 공급 호스 및/또는 공급 라인은 파이프 클립으로 로봇 아암에 체결된다. 그러나, 파이프 클립을 장착 및 분리하는 데에는 시간이 오래 걸리고, 이를 수행하는 동안, 로봇 아암에 대한 손상이 쉽게 발생할 수 있다. 또한, 고정 장착으로 인해 파이프 클립은 로봇 아암의 동작을 방해 및/또는 제한할 수 있는 방해가 되는 윤곽을 나타낸다.
마찬가지로, 예를 들어, 플라스틱 재료로 형성된 강성 슬리브 내에서 로봇 아암을 따라 공급 호스 및/또는 공급 라인을 안내하고/하거나 공급 호스 및/또는 라인을 별도로 배열된 추가적 아암에 의해 원하는 위치에 보유하는 것이 알려져 있다. 그러나, 두 경우 모두 로봇 아암의 작업 범위가 제한되며 충돌 위험이 증가한다.
공급 호스 및 공급 라인은 또한 원론적으로 로봇 아암 내에서 안내될 수 있지만, 이는 유지 보수 및 누설 인식이 더 어려워지게 한다. 또한, 산업 로봇을 다른 용례 및/또는 공급이 필요한 다른 도구에 적응시켜야 하는 경우 비용이 많이 드는 변환이 필요하다. 특히, 초소형 로봇을 사용하는 경우 공간 부족으로 인해 초소형 로봇 아암 내에서 공급 호스 또는 공급 라인을 안내할 가능성이 없다.
또한, 특히 초소형 로봇은 많은 다양한 용례에서 사용되며 새로운 용례를 위해서는 매번 비용이 많이 드는 방식으로 공급 호스 및/또는 공급 라인을 새로 장비해야 한다.
본 발명의 목적은 종래 기술을 개선하는 것이다.
이 목적은 홀더, 공급 호스 및/또는 공급 라인을 위한 할당 가능한 보유 유닛 및 로킹 가능한 인장 요소를 갖는, 산업 로봇 아암에 대한 체결을 위한 적어도 하나의 공급 호스 및/또는 적어도 하나의 공급 라인용 체결 장치에 의해 달성되고, 홀더는 로킹 가능한 인장 요소 상에 배열되어, 인장 요소가 산업 로봇 아암 주위에 걸리고 로킹됨으로써 홀더가 산업 로봇 아암에 유연하게 체결 및/또는 위치될 수 있으며, 따라서, 홀더가 할당 가능한 보유 유닛에 연결되는 경우, 공급 호스 및/또는 공급 라인은 특정 방식으로 배향될 수 있다.
따라서, 산업 로봇 아암의 길이방향을 따라 유연하게 그리고 로봇 아암의 길이방향에 횡방향으로 임의의 각도로 유연하게 위치될 수 있는 적응 가능한 체결 장치가 제공된다. 결과적으로, 공급 호스 및/또는 공급 라인을 위한 체결 장치는 로봇 아암의 동작에 악영향을 미치지 않으면서 산업 로봇 아암의 최적 위치에 배열될 수 있다. 결과적으로 로봇 아암의 방해가 되는 윤곽을 줄이고 충돌의 위험을 완화시킬 수 있다.
추가적으로, 인장 요소를 이용한 걸림 및 로킹으로 인해, 체결 장치를 산업 로봇 아암에 간단하고 신속하고 안전하게 체결할 수 있다. 결과적으로, 또한, 예를 들어 용접 스파크로 인한 결함 또는 손상의 경우에, 체결 위치의 신속한 적응 및/또는 교정 및 체결 장치의 신속한 교체가 가능하다.
체결 장치로 인해 로봇 아암의 외부 윤곽을 따라 공급 호스 및/또는 공급 라인의 근접 안내가 이루어지는 것이 특히 유리하다.
인장 요소가 상이한 인장 요소 길이로 로킹될 수 있다는 사실로 인해, 체결 장치는 상이한 로봇 유형 및/또는 로봇 아암 직경에 사용될 수 있다. 결과적으로, 체결 장치는 보편적으로 사용 및 조합될 수 있다. 특히, 체결 장치는 또한 예를 들어 케이블 클립 및/또는 인장 클립 같은 공급 호스 및/또는 공급 라인을 위한 종래의 보유 수단과 조합될 수 있다.
본 발명의 한가지 본질적인 개념은 공급 호스 및/또는 공급 라인을 위한 체결 장치가 인장 요소에 의해 산업 로봇 아암의 임의의 위치에서 유연하고 쉽게 분리 가능한 방식으로 체결될 수 있다는 사실에 기초하며, 인장 요소에 연결된 홀더는 산업 로봇 아암의 외부 윤곽에 최적으로 적응된다. 홀더가 공급 호스 및/또는 공급 라인을 위한 보유 유닛에 연결될 수 있기 때문에, 공급 호스 및/또는 공급 라인은 산업 로봇 아암에 대해 정해진 방식으로 배향 및/또는 안내된다.
다음 용어가 설명된다:
"체결 장치"는 특히 부품을 산업 로봇 아암, 동작 수단, 동작 장치, 기계가공 장비 및/또는 공작 기계에 체결 및/또는 고정하기 위한 기술적 장치이다. 체결 장치는 특히 공급 호스 및/또는 공급 라인을 산업 로봇 아암에 체결시키는 역할을 한다. 체결 장치는 특히 홀더 및 로킹 가능한 인장 요소를 포함한다.
"공급 호스"는 특히 산업 로봇에 전력, 매체 및/또는 물질 및/또는 정보를 공급하는 역할을 하는 규정된 단면을 갖는 유연한 세장형 중공체이다. 공급 호스에서, 특히 예를 들어 물 또는 압축 공기 같은 매체 또는 물질은 직접적으로 안내되거나, 공급 라인 또는 복수의 공급 라인 및/또는 매체를 공급하기 위한 추가적인 호스가 공급 호스 내에서 다발로 안내된다. 공급 호스는 특히 주름 호스, 주름 튜브 및/또는 매끄러운 호스일 수 있다. 공급 호스는 특히 공칭 직경이 DN 8 내지 DN 100, 바람직하게는 DN 10 내지 DN 50이다. 공급 호스는 특히 원형, 타원형, 각도형 및/또는 직사각형 프로파일을 갖는다.
"공급 라인"은 특히 전류 및/또는 정보를 전송하기 위한 전기 라인이다. 공급 라인은 특히 예를 들어 와이어 또는 연선 형태의 전기 전도체 및/또는 절연 피복을 포함한다. 공급 라인은 또한 특히 절연재로 덮여진 단일 코어 또는 코어(개별 라인)의 다중 코어 복합물로서의 케이블일 수 있다. 공급 라인은 특히 원형, 타원형, 각도형 및/또는 직사각형 프로파일을 갖는다.
"산업 로봇 아암"은 특히 작업편의 취급, 장착 또는 조립 및/또는 기계가공을 위한 범용의 프로그램 가능한 기계로서 기능하는 산업 로봇의 이동식 아암이다. 산업 로봇 아암은 특히 그 자유 아암 단부에 도구를 포함한다. 산업 로봇 아암은 특히 6개 이상의 회전축을 포함한다. 산업 로봇 아암은 특히 초소형 로봇의 로봇 아암이다.
"홀더"는 특히 물체를 보유하기 위한 장치를 의미하는 것으로 이해된다. 홀더는 특히 보유 유닛 및/또는 고정 판을 보유하는 역할을 하며, 그 위에는 차례로 공급 호스 및/또는 공급 라인이 보유된다. 이를 위해, 홀더는 특히 연결 유닛 및/또는 수용 수단을 포함한다. 홀더는 특히 산업 로봇 아암의 외부 윤곽에 최적으로 적응되고/되거나 산업 로봇 아암의 외부 윤곽에 지지되도록 구성된다.
"보유 유닛"은 공급 호스 및/또는 공급 라인을 위한 홀더이다. 보유 유닛은 예를 들어 클립, 클램프, 인장 클립 및/또는 재킷일 수 있다. 보유 유닛은 특히 이동 불가능하거나 회전 가능하고 및/또는 피봇 가능하다. 대안적으로, 보유 유닛은 또한 공급 호스 및/또는 공급 라인 주위에서 외부로 안내되고 홀더에 직접적으로 그리고/또는 고정 판에 체결되는 후크 앤 루프 테이프 및/또는 다른 인장 요소일 수 있다. 후크 앤 루프 테이프가 공급 호스 또는 공급 라인을 홀더에 체결시키는 동시에 또한 홀더를 산업 로봇 아암에 체결시키는 역할을 모두 수행하는 것이 특히 유리하다. 따라서, 이 경우 보유 유닛과 인장 요소는 동일하고/하거나 단일 부분이다.
"인장 요소"는 특히 물체를 체결하고 걸기 위한 체결구를 갖는 밴드이다. 인장 요소는 특히 산업 로봇 아암 주위에서 인장되고 로킹된다. 인장 요소의 밴드는 특히 직조되고/되거나 플라스틱 재료를 포함한다. 인장 요소는 특히 폴리프로필렌, 폴리에스테르, 나일론 및/또는 면으로 구성된다.
"걸림"은 특히 인장 요소가 장력 하에서 단단히 클램핑될 때 산업 로봇 아암을 외부로부터 둘러싼다는 것을 의미하는 것으로 이해된다.
"유연하게 체결 및/또는 위치될 수 있다"는 것은 특히 홀더가 산업 로봇 아암의 임의의 위치에 체결될 수 있고 그 위치에서 간단하고 용이하게 적응될 수 있다는 것을 의미한다.
체결 장치의 또 다른 실시예에서, 로킹 가능한 인장 요소는 홀더의 내부를 통해 안내된다.
인장 요소의 길이의 일부가 홀더의 내부를 통해 안내되기 때문에, 걸림시에, 인장 요소의 압력이 그 내부의 홀더의 하위 재료에 가해진다. 결과적으로, 걸림시 인장 요소와 산업 로봇 아암 사이에 위치되는 홀더의 재료는 인장 압력에 의해 산업 로봇 아암에 대해 최적으로 가압 및/또는 성형된다.
먼저, 홀더 내부의 로킹 가능한 인장 요소는 홀더의 주변 재료와 단단히 연결될 수 있으며, 예를 들어 홀더의 재료에 밀봉될 수 있다. 둘째로, 로킹 가능한 인장 요소는 홀더의 내부에서 이동 가능하게 배치되고, 홀더는 그 내부에 로킹 가능한 인장 요소의 치수에 대응하는 공동을 갖고, 로킹 가능한 인장 요소는 홀더의 개구를 통해 이 공동에 도입되고, 홀더의 다른 단부에서, 제2 개구를 통해 다시 공동을 벗어난다. 후자의 변형예는 홀더가 인장 요소를 따라 변위 가능하고 따라서 인장 요소상의 그 위치에서 상이한 로봇 아암 직경에 더욱 쉽게 적응될 수 있다는 이점을 갖는다.
로봇 아암을 최적으로 둘러싸기 위해, 로킹 가능한 인장 요소는 홀더의 길이방향으로 안내된다.
따라서, 홀더의 길이방향 치수를 따라 길이방향으로 홀더의 내부에서 안내되기 때문에 인장 요소는 홀더의 하위 재료에 인장 압력을 가하고 산업 로봇 아암에 대해 가압할 수 있다.
"길이방향"은 그 가장 큰 범위의 방향에 해당하는 홀더의 방향이다.
산업 로봇 아암에서 체결 장치의 미끄럼을 방지하기 위해, 홀더는 탄성 재료를 포함하여, 인장 요소가 산업 로봇 아암 주위에 걸려 로킹되는 경우 홀더는 홀더의 탄성 재료와 산업 로봇 아암의 재료 사이의 마찰 연결에 의해 위치가 고정된다.
따라서, 마찰 연결에 의해 인장 요소에 추가하여 위치가 고정되고 신뢰할 수 있는 체결 장치가 보장된다.
상이한 직경의 산업 로봇 아암에 더 잘 적응할 수 있도록 홀더는 굴곡 가능하게 유연하다.
특히, 탄성 재료로 인해, 인장 요소에 연결된 홀더는 굴곡 가능하게 유연하고 변형 가능하여, 산업 로봇 아암의 외부 윤곽에 최적으로 적응한다.
"굴곡 가능하게 유연한" 홀더는 굴곡될 때 탄성 거동을 나타내며, 특히 굴곡된 후에 원래 형태로 다시 역방향 변형되므로, 굴곡 가능한 유연한 홀더의 형태가 특정 로봇 아암에 대해 미리 적응될 필요가 없기 때문에 특히 유리하다.
홀더의 탄성적이고 굴곡 가능하게 유연한 설계로 인해, 공급 호스 및/또는 공급 라인은 산업 로봇 아암의 이동으로 인한 더 낮은 반대 굽힘 응력을 받는다. 따라서, 공급 호스 및/또는 공급 라인의 사용 수명이 길어진다.
"탄성 재료"는 특히 탄성 변형 가능한 플라스틱 재료(엘라스토머)이다. 탄성 재료는 예를 들어 천연 고무 또는 합성 고무이다. 탄성 재료는 특히 인장 하중 하에서 신장되고 인장 응력의 강하 이후 다시 수축된다.
"마찰 연결"에 의해, 특히 2개의 물체의 면 사이의 정적 마찰에 의해 2개의 물체의 변위가 방지된다. 특히, 마찰 연결은 홀더의 탄성 재료와 산업 로봇 아암의 재료가 서로에 대해 변위되지 않도록 하여 홀더가 산업 로봇 아암 상에서 위치가 고정되게 한다.
"위치 고정"은 특히 서로에 대한 홀더 및 산업 로봇 아암의 위치 및/또는 장소가 변하지 않음을 의미하는 것으로 이해된다.
체결 장치의 다른 실시예에서, 홀더는 폴리우레탄, 특히 쇼어 경도가 30° 내지 60° 쇼어 A인 것을 포함한다.
홀더에 대해 쇼어 경도가 30° 내지 60° 쇼어 A, 바람직하게는 40° 내지 50° 쇼어 A인 폴리우레탄을 사용하는 것이 특히 유리하며, 그 이유는 결과적으로 일반적으로 사용되는 산업 로봇 아암의 재료, 즉, 알루미늄과의 최적의 마찰 연결이 달성되기 때문이다.
따라서, 주조 재료, 알루미늄, 도장된 표면과 같은 상이한 표면에 사용될 수 있는 미끄럼 방지 홀더가 제공된다.
마찰 연결을 위한 충분한 영역을 가용하게 하기 위해, 마찰 연결의 경우, 홀더의 탄성 재료 및/또는 폴리우레탄은 산업 로봇 아암의 길이방향에 대해 횡방향으로 90° 내지 230°, 바람직하게는 150° 내지 180°의 각도 범위를 포함한다.
체결 장치의 또 다른 실시예에서, 홀더 및/또는 굴곡 가능한 유연한 홀더는 산업 로봇 아암과의 접촉면에 적어도 하나의 절개부 또는 복수의 절개부를 가져서, 홀더 및/또는 굴곡 가능한 유연한 홀더가 산업 로봇 아암에 형성될 수 있다.
산업 로봇 아암에 대해 놓여지는 홀더 및/또는 굴곡 가능한 유연한 홀더의 접촉면이 불평탄하게 및/또는 절개부와 함께 형성되어, 홀더가 이들 절개부에서 더 잘 굴곡될 수 있고 따라서 상이한 로봇 아암 직경에 보다 양호하게 적응 및/또는 형성되는 것이 특히 유리하다. 또한, 불평탄 구성에 의해 미끄럼 저항을 달성할 수도 있다.
"절개부"는 특히 홀더의 만입부이며, 이 만입부는 산업 로봇 아암과 홀더의 접촉면의 측면에서 개방되어 있다. 바람직하게, 홀더는 그 길이방향을 따라 복수의 절개부를 가지며, 절개부는 예를 들어 원형, 각도형 및/또는 삼각형 형태와 같은 상이한 형태, 및 상이한 절개부 깊이를 가질 수 있다.
체결 장치의 다른 실시예에서, 대안적으로 또는 추가적으로 홀더는 기계적 및/또는 화학적 수단에 의해 산업 로봇 아암에 상호간에 위치가 고정될 수 있다.
결과적으로, 공급 라인 및/또는 공급 호스의 중량이 크거나 광범위 이동, 그리고, 이에 따른 굴곡 응력이 큰 경우에도 미끄럼을 방지할 수 있다.
"기계적 및/또는 화학적 수단"은 특히 기계적 및/또는 화학적 힘에 의해 홀더의 인접면과 산업 로봇 아암 사이의 이동을 방지하는 수단이다. "화학적 수단"은 예를 들어 감압 접착제일 수 있으며, 감압 접착제는 영구적 접착제이거나 다시 재분리 가능할 수 있다. "기계적 수단"은 예를 들어 산업 로봇 아암의 홈에 맞물리는 홀더 상의 돌출부일 수 있다. 기계적 수단으로서, 예를 들어 또한 미늘을 갖는 후크 앤 루프 테이프가 홀더 상에 배열될 수 있고, 루프를 갖는 관련 후크 앤 루프 테이프가 산업 로봇 아암 상에 배열되어 후크 앤 루프 체결구를 형성할 수 있다.
산업 로봇 아암의 광범위 이동의 경우에도 인장 요소의 확실한 로킹을 보장하기 위해, 로킹 가능한 인장 요소는 후크 앤 루프 체결구, 스냅 체결구, 클램핑 체결구, 프레스-온 클로저, 캠-유형 체결구 및/또는 D-링 체결구를 포함한다.
다른 실시예에서, 체결 장치는 고정 판을 할당 가능한 보유 유닛에 연결하기 위한 적어도 하나의 연결 유닛을 갖는 고정 판을 포함하고, 고정 판은 홀더 상에 배열된다.
홀더에 고정 판이 연결되고 이 판이 홀더의 탄성에도 불구하고 공급 호스 및/또는 공급 라인의 홀더에 대한 연결을 위해 기능하기 때문에, 공급 호스 및/또는 공급 라인을 보유하기 위해 충분한 강성이 산업 로봇 아암의 광범위 이동의 경우에도 보증된다. 따라서, 공급 호스 및/또는 공급 라인은 산업 로봇 아암에 대해 정의된 방식으로 배향 및/또는 안내된다.
"고정 판"은 특히 공급 호스 및/또는 공급 라인을 위한 보유 유닛이 연결될 수 있거나 연결되는 강성 판이다. 고정 판은 예를 들어 금속 및/또는 세라믹과 같은 강성 재료를 포함한다. 고정 판은 특히 공급 호스 및/또는 공급 라인을 위한 보유 유닛을 견고하게 연결하는 역할을 하는 연결 유닛을 포함한다. "연결 유닛"은 예를 들어 스크류 나사, 홈, 키웨이 및/또는 유사물일 수 있다.
체결 장치의 다른 실시예에서, 홀더는 고정 판이 부착될 수 있거나 그 내부로 고정 판이 도입될 수 있는 수용 수단을 포함하여 고정 판이 교환 가능하다.
따라서, 수용 수단을 통해 홀더와 고정 판 사이의 최적의 연결이 보장된다.
걸림 동안 홀더에 대한 인장 응력에 의해 수용 수단이 또한 고정 판이 홀더에 대해, 그리고, 따라서 산업 로봇 아암의 방향으로 가압되도록 변형될 수 있게 수용 수단이 구현되는 것이 특히 유리하다. 따라서, 수용 수단 및/또는 홀더가 고정 판을 적어도 부분적으로 둘러싸는 것이 유리하다.
따라서, 공급 호스 및/또는 공급 라인을 위한 보유 유닛으로 완성되는 교환 가능한 고정 판은 고정 판의 연결 유닛으로부터 보유 유닛이 분리될 필요 없이 변경될 수 있다.
"수용 수단"은 특히 홀더 내의 슬롯, 절개부 또는 공동이며, 그 위에 고정 판이 배치될 수 있거나 그 내부로 고정 판이 삽입될 수 있다.
고정 판의 안정적인 위치를 달성하기 위해, 고정 판은 홀더 내에 배열되며, 보유 유닛에 대한 연결을 위한 적어도 하나의 연결 유닛은 외부로부터 접근 가능하다.
홀더 내의 고정 판의 배열로 인해, 인장 스트랩이 인장되는 경우에, 인장 응력이 홀더로부터 고정 판으로 전달되어, 고정 판이 하위 인장 스트랩 및 산업 로봇 아암에 대해 가압된다. 따라서, 공급 라인 및/또는 공급 호스와 고정 판 및 그에 연결된 홀더 유닛의 위치 고정이 달성된다.
다른 실시예에서, 체결 장치 및/또는 체결 수단은 보유 유닛 및/또는 공급 호스 및/또는 공급 라인을 포함하며, 공급 호스 및/또는 공급 라인은 산업 로봇 아암의 외부 윤곽을 따라 안내될 수 있다.
따라서, 공급 라인 및/또는 공급 호스는 산업 로봇 아암의 외부 윤곽을 따라 밀접하게 안내될 수 있지만, 그럼에도 불구하고, 낮은 반대 굽힘 응력이 가해진다.
상이한 산업 로봇 아암에 대해 사용할 수 있도록 홀더는 원형, 타원형, 각도형 및/또는 직사각형 프로파일을 갖는다.
결과적으로, 홀더는 그 프로파일에 따라 산업 로봇 아암에 직접 맞닿아 놓이거나 산업 로봇 아암 상의 한 지점 또는 여러 지점에서 지지된다. 따라서, 산업 로봇 아암으로부터 공급 호스 및/또는 공급 라인의 거리는 홀더의 형태에 의해 설정될 수 있다.
본 발명의 다른 양태에서, 이 목적은 작업편의 취급, 조립 및/또는 기계가공을 위한 산업 로봇 아암에 의해 달성되며, 산업 로봇 아암은 전력, 매체 및/또는 신호를 공급하기 위한 적어도 하나의 공급 호스 및/또는 적어도 하나의 공급 라인 및 적어도 하나의 체결 장치를 포함하고, 체결 장치는 산업 로봇 아암에 체결되며 홀더, 공급 호스 및/또는 공급 라인을 위한 할당 가능한 보유 유닛 및 로킹 가능한 인장 요소를 포함하고, 보유 유닛은 홀더에 연결되고, 홀더는 로킹 가능한 인장 요소 상에 배열되고, 홀더는 인장 요소에 의해 산업 로봇 아암 주위에 걸려지고 로킹되며, 산업 로봇 아암 상에 유연하게 체결 및/또는 위치됨으로써, 공급 호스 및/또는 공급 라인이 특정 방식으로 배향된다.
산업 로봇 아암의 다른 실시예에서, 체결 장치는 앞서 설명한 체결 장치이거나 공급 호스 및/또는 공급 라인은 앞서 설명한 공급 호스 및/또는 앞서 설명한 공급 라인이다.
본 발명은 실시예의 예를 참조하여 아래에서 보다 구체적으로 설명될 것이다.
도 1은 주름 호스를 갖는 체결 홀더의 개략적인 단면도이다.
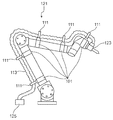
도 2는 5개의 체결 홀더 및 주름 호스를 갖는 산업 로봇 아암의 개략적인 단면도이다.
도 3은 직경이 큰 산업 로봇 아암 상에 강성 홀더를 갖는 체결 홀더의 개략적인 단면도이다.
도 4는 중간 직경을 갖는 산업 로봇 아암 상에 강성 홀더를 갖는 체결 홀더의 개략적인 단면도이다.
도 5는 작은 직경의 산업 로봇 아암 상에 강성 홀더를 갖는 체결 홀더의 개략적인 단면도이다.
도 6은 PU 홀더, 및 동시에 주름 튜브를 PU 홀더에 체결하고 PU 홀더를 산업 로봇 아암에 체결하기 위한 후크 앤 루프 테이프를 갖는 체결 홀더의 개략적인 단면도이다.
도 2는 5개의 체결 홀더 및 주름 호스를 갖는 산업 로봇 아암의 개략적인 단면도이다.
도 3은 직경이 큰 산업 로봇 아암 상에 강성 홀더를 갖는 체결 홀더의 개략적인 단면도이다.
도 4는 중간 직경을 갖는 산업 로봇 아암 상에 강성 홀더를 갖는 체결 홀더의 개략적인 단면도이다.
도 5는 작은 직경의 산업 로봇 아암 상에 강성 홀더를 갖는 체결 홀더의 개략적인 단면도이다.
도 6은 PU 홀더, 및 동시에 주름 튜브를 PU 홀더에 체결하고 PU 홀더를 산업 로봇 아암에 체결하기 위한 후크 앤 루프 테이프를 갖는 체결 홀더의 개략적인 단면도이다.
체결 홀더(101)는 벨트 스트랩(105)을 포함하고, 벨트 스트랩(105)은 그 양 단부에 후크 앤 루프 체결구(109)를 포함한다. 또한, 체결 홀더(101)는 PU 홀더(103) 및 강철 판(107)을 포함한다. 벨트 스트랩(105)은 PU 홀더(103)의 내부를 통해 안내되며, 후크 앤 루프 체결구(109)에 의해 폐쇄되는 벨트 스트랩(105)의 경우, PU 홀더(103)는 폐쇄된 벨트 스트랩(105)의 길이의 180°의 각도(117), 그리고 또한 둘러싸여질 산업 로봇 아암(121)의 둘레의 180°의 각도(117)에 대응하는 길이를 갖는다.
강철 판(107)은 PU 홀더(103)의 내부의 공동 내에 배열된다. 강철 판(107)은 2개의 스크류 나사를 포함하며, 이 내부에는 피봇 가능한 클립(111)의 2개의 스크류(115)가 나사 결합된다. 이 경우, 2개의 스크류(115)는 PU 홀더(103)의 2개의 개구를 통해 강철 판(107) 내로 안내된다. 피봇 가능한 클립(111)은 그 내부에 주름 호스(113)를 지탱한다. 주름 호스의 공칭 직경은 DN 25이다.
산업 로봇 아암(121)은 6개의 회전축을 포함한다. 산업 로봇 아암(121)의 단부에는 작업편을 조립하기 위한 조립 도구(123)가 배치되어 있다. 조립 도구(123)는 주름 호스(113)를 통해 중앙 공급 수단(125)에 연결된다. 주름 호스(113)에서, 전력 공급 라인, 신호 라인 및 공기 호스가 중앙 공급 수단(125)으로부터 도구(123)로 안내된다.
산업 로봇 아암(121)을 따른 5개의 위치에서, 각각의 벨트 스트랩(105)을 조이고 각각의 후크 앤 루프 체결구(109)에 의해 로킹함으로써 5개의 체결 홀더(101)가 위치 및 체결된다. 체결 홀더(101)는 각각의 경우에 산업 로봇 아암(121)에 맞닿아 놓여지는 각각의 PU 홀더(103)의 면과 알루미늄으로 구성된 산업 로봇 아암(121)의 접촉면 사이의 마찰 연결에 의해 위치가 고정된다.
주름 호스(113)는 각각의 경우에 피봇 가능한 클립(111)에 의해 5개의 체결 홀더(101)에 연결되어 주름 호스(113)는 산업 로봇 아암(121)을 따라 밀접하게 안내된다.
각각의 체결 홀더(101)의 탄성 PU 홀더(103)로 인해, 주름 호스(113)는 산업 로봇 아암(121)을 따라 굴곡 가능하게 유연한 방식으로 안내되며 조립 중 산업 로봇 아암(121)의 이동으로 인해 단지 약간의 굴곡 응력만을 받는다. 주름 호스(113)의 밀접한 안내로 인해, 산업 로봇 아암(121)의 작업 범위에서 체결 홀더(101)로 인한 방해가 되는 윤곽이 발생하지 않는다. 따라서, 작업편을 조립할 때 산업 로봇 아암(121)의 동작이 손상되지 않으면서, 밀접하게 안내되는 주름 호스(113)에 의해 산업 로봇 아암(121)으로의 최적의 전력, 신호 및 압축 공기 공급이 이루어진다.
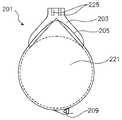
일 대안에서, 체결 홀더(201)는 아크릴/부타디엔/스티렌 공중합체로 제조된 강성 홀더(203)를 포함한다. 또한, 체결 홀더(201)는 클램핑 체결구(209)를 갖는 폴리에스테르 밴드(205)를 포함한다.
강성 홀더(203)는 그 2개의 림(limb)의 그 내부측 상에서 각지도록 형성되고, 그 상부측에 2개의 스크류 나사(225)를 포함한다. 폴리에스테르 밴드(205)는 강성 홀더(203)를 통해 안내된다.
산업 로봇 아암(221) 주위에 체결하기 위해, 강성 홀더(203)를 갖는 폴리에스테르 밴드(205)는 산업 로봇 아암(221) 주위에서 인장되고 후크 앤 루프 체결구(209)에 의해 조여지고 로킹된다.
산업 로봇 아암(221)은 250㎜의 큰 직경을 가지므로, 강성 홀더(203)는 산업 로봇 아암(221)의 둘레의 상부 부분 상에 그 림의 2개의 단부를 갖는 상태로 놓여지고, 2개의 림 사이의 거리는 산업 로봇 아암(221)의 주변의 90° 각도를 둘러싼다.
그 후, 도시되지 않은 클램핑 클립이 스크류에 의해 스크류 나사(225)에 나사 결합되고, 그 내부에 복수의 데이터 및 전력 케이블을 운반하는 도시되지 않은 공급 호스가 클램핑 클립에 클램핑된다.
체결 홀더(201)가 산업 로봇 아암(221)에 사용된 후, 강성 홀더(203)를 갖는 체결 홀더(201)는 산업 로봇 아암(231)에 대응하여 체결된다. 산업 로봇 아암(231)은 평균 직경이 150㎜이므로, 강성 홀더(203)는 그 2개의 림의 단부로 산업 로봇 아암(231) 상에 놓여지는 것이 아니라 그 내부측에 놓인다. 이 경우, 강성 홀더(203)는 산업 로봇 아암(231) 주변의 135°의 각도를 둘러싼다.
다음의 응용에서, 강성 홀더(203)를 갖는 체결 홀더(201)는 작은 직경이 75㎜인 산업 로봇 아암(241)에 유사하게 체결된다. 강성 홀더(203)는 산업 로봇 아암(241) 상에서 그 림의 내부측 중앙에 놓여지고, 산업 로봇 아암(241) 주변의 180°의 각도(117)를 전체적으로 둘러싼다.
따라서, 강성 홀더(203)를 갖는 체결 홀더(201)는 상이한 산업 로봇 아암에 대해 유연하게 사용될 수 있다.
다른 대안에서, 체결 홀더(301)는 유연한 PU 홀더(303), 후크 앤 루프 체결구(309)를 갖는 후크 앤 루프 테이프(305) 및 반원형 리셉터클(340)을 포함한다. PU 홀더(303)는 측방향으로 2개의 도입 슬롯(330)을 포함하고, 이를 통해 후크 앤 루프 테이프(305)가 각각의 경우 PU 홀더(303)의 상부 부분을 통해 안내된다. PU 홀더(303)의 두 림을 따라, 후크 앤 루프 테이프(305)는 각각의 경우 가이드 사이에서 외부에 놓인다.
장착을 위해, 후크 앤 루프 테이프(305)는 도입 슬롯(330)을 통해 도입되어 반원형 리셉터클(340) 위에 반원을 형성한다. 이어서, 체결 홀더(301)는 산업 로봇 아암(321)의 외부에서 의도된 지점에 위치된다. 외부 직경이 29.4㎜인 주름 튜브(313)가 상부 후크 앤 루프 테이프(305)와 PU 홀더(303) 사이를 통과하고 PU 홀더(303)의 반원형 리셉터클(340)에 배설된다. 후크 앤 루프 테이프(305)는 주름 튜브(313) 및 산업 로봇 아암(312) 주위에서 조여지고 후크 앤 루프 체결구(309)에 의해 로킹된다. 결과적으로, 동시에 하나의 동작 단계에서 주름 튜브(313)가 PU 홀더(303)에 체결되고, PU 홀더(303)가 산업 로봇 아암(321)에 체결된다. 산업 로봇 아암(321)과의 내부 접촉면 상의 PU 홀더(303)의 비균일 실시예로 인해, PU 홀더(303)는 산업 로봇 아암(321)의 직경에 더 잘 적응하고 미끄럼 방지성이다.
따라서, 스크류 및 도구를 사용하지 않고, 신속한 설치를 가능하게 하고, 추가로 주름 튜브(313)의 높이 보다 단지 약간 높은, 전체 높이가 매우 낮은 체결 홀더(301)가 제공된다.
Claims (15)
- 산업 로봇 아암에 체결하기 위한 적어도 하나의 공급 호스 및/또는 적어도 하나의 공급 라인용 체결 장치이며, 홀더, 공급 호스 및/또는 공급 라인을 위해 할당 가능한 보유 유닛, 및 로킹 가능한 인장 요소를 구비하고, 홀더는 로킹 가능한 인장 요소 상에 배열되어, 인장 요소가 산업 로봇 아암 주위에 걸리고 로킹됨으로써 홀더가 산업 로봇 아암에 유연하게 체결 및/또는 위치될 수 있으며, 따라서, 홀더가 할당 가능한 보유 유닛에 연결되는 경우, 공급 호스 및/또는 공급 라인이 특정 방식으로 배향될 수 있는, 체결 장치.
- 제1항에 있어서, 로킹 가능한 인장 요소는 홀더의 내부를 통해 안내되는 것을 특징으로 하는, 체결 장치.
- 제2항에 있어서, 로킹 가능한 인장 요소는 홀더의 길이방향으로 안내되는 것을 특징으로 하는, 체결 장치.
- 제1항 내지 제3항 중 어느 한 항에 있어서, 홀더는 탄성 재료를 포함하여, 인장 요소가 산업 로봇 아암 주위에 걸려 로킹되는 경우에, 홀더는 홀더의 탄성 재료와 산업 로봇 아암의 재료 사이의 마찰 연결에 의해 위치가 고정되는 것을 특징으로 하는, 체결 장치.
- 제4항에 있어서, 홀더는 특히 쇼어 경도가 30° 내지 60° 쇼어 A인 폴리우레탄을 포함하는 것을 특징으로 하는, 체결 장치.
- 제4항 또는 제5항에 있어서, 마찰 연결의 경우, 홀더의 탄성 재료 및/또는 폴리우레탄은 산업 로봇 아암의 길이방향에 횡방향으로 90° 내지 230°, 바람직하게는 150° 내지 180°의 각도 범위를 둘러싸는 것을 특징으로 하는, 체결 장치.
- 제4항 내지 제6항 중 어느 한 항에 있어서, 홀더는 굴곡 가능하게 유연하여, 굴곡 가능한 유연한 홀더가 산업 로봇 아암의 상이한 직경에 적응될 수 있는 것을 특징으로 하는, 체결 장치.
- 제1항 내지 제7항 중 어느 한 항에 있어서, 홀더 및/또는 굴곡 가능한 유연한 홀더는 산업 로봇 아암과의 접촉면 상에 적어도 하나의 절개부 또는 복수의 절개부를 포함하여, 홀더 및/또는 굴곡 가능한 유연한 홀더가 산업 로봇 아암 상에 형성될 수 있는 것을 특징으로 하는, 체결 장치.
- 제1항 내지 제8항 중 어느 한 항에 있어서, 홀더는 기계적 및/또는 화학적 수단에 의해 산업 로봇 아암에 상호간에 위치가 고정될 수 있는 것을 특징으로 하는, 체결 장치.
- 제1항 내지 제9항 중 어느 한 항에 있어서, 로킹 가능한 인장 요소는 후크 앤 루프 체결구, 스냅 체결구, 클램핑 체결구, 프레스-온 클로저(press-on closure), 캠-유형 체결구 및/또는 D-링 체결구를 포함하는 것을 특징으로 하는, 체결 장치.
- 제1항 내지 제10항 중 어느 한 항에 있어서, 체결 장치는 고정 판을 포함하고, 고정 판은 고정 판을 할당 가능한 보유 유닛에 연결하기 위한 적어도 하나의 연결 유닛을 가지며, 고정 판은 홀더 상에 배열되는 것을 특징으로 하는, 체결 장치.
- 제11항에 있어서, 홀더는 고정 판이 부착될 수 있거나 또는 그 내부로 도입될 수 있는 수용 수단을 포함하여, 고정 판이 교환될 수 있는 것을 특징으로 하는, 체결 장치.
- 제12항에 있어서, 고정 판은 홀더 내에 배열되며, 보유 유닛에 대한 연결을 위한 적어도 하나의 연결 유닛은 외부로부터 접근 가능한 것을 특징으로 하는, 체결 장치.
- 제1항 내지 제13항 중 어느 한 항에 있어서, 체결 장치 및/또는 체결 장치들은 보유 유닛 및/또는 공급 호스 및/또는 공급 라인을 포함하여, 공급 호스 및/또는 공급 라인이 산업 로봇 아암의 외부 윤곽을 따라 안내될 수 있는 것을 특징으로 하는, 체결 장치.
- 제1항 내지 제14항 중 어느 한 항에 있어서, 홀더는 원형, 타원형, 각도형 및/또는 직사각형 프로파일을 갖는 것을 특징으로 하는, 체결 장치.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102017107043.5A DE102017107043A1 (de) | 2017-03-31 | 2017-03-31 | Befestigungsvorrichtung für einen Versorgungsschlauch und/oder eine Versorgungsleitung zum Befestigen an einem Industrieroboterarm |
| DE102017107043.5 | 2017-03-31 | ||
| PCT/DE2018/200015 WO2018177482A1 (de) | 2017-03-31 | 2018-02-23 | Befestigungsvorrichtung für einen versorgungsschlauch und/oder eine versorgungsleitung zum befestigen an einem industrieroboterarm |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20190130007A true KR20190130007A (ko) | 2019-11-20 |
| KR102464741B1 KR102464741B1 (ko) | 2022-11-09 |
Family
ID=61832234
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020197031795A KR102464741B1 (ko) | 2017-03-31 | 2018-02-23 | 산업 로봇 아암에 대한 부착을 위한 공급 파이프 및/또는 공급 라인을 위한 부착 장치 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11446830B2 (ko) |
| EP (1) | EP3577380B1 (ko) |
| KR (1) | KR102464741B1 (ko) |
| CN (1) | CN110573780B (ko) |
| DE (1) | DE102017107043A1 (ko) |
| WO (1) | WO2018177482A1 (ko) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE202019101830U1 (de) | 2019-04-01 | 2019-04-29 | Igus Gmbh | Befestigungsteil |
| US11602862B2 (en) * | 2020-03-11 | 2023-03-14 | Energid Technologies Corporation | Pneumatic hose assembly for a robot |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100638637B1 (ko) * | 2005-10-19 | 2006-10-27 | 기아자동차주식회사 | 와이어링 간격유지용 밴드케이블 |
| KR20080001094A (ko) * | 2006-06-29 | 2008-01-03 | 최광술 | 산업용 로봇의 케이블 가이드장치 |
| JP2008023680A (ja) * | 2006-07-24 | 2008-02-07 | Yutaka Electronics Industry Co Ltd | ロボットアーム用ブラケット及びロボットアーム |
| US20090126162A1 (en) * | 2004-04-20 | 2009-05-21 | Phil Head | Cable Clamps |
Family Cites Families (42)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US811343A (en) * | 1905-07-07 | 1906-01-30 | Ward C Walker | Hose-clamp. |
| GB868590A (en) * | 1957-07-11 | 1961-05-17 | James Stewart | Improvements in or relating to adjustable clamps for pipes |
| US3235925A (en) * | 1964-01-23 | 1966-02-22 | Republic Ind Corp | Clamping bands |
| US3851979A (en) * | 1972-09-20 | 1974-12-03 | Woodhead Inc Daniel | Cable and hose clamp |
| DE3434899A1 (de) | 1983-10-19 | 1985-05-23 | Kuka Schweissanlagen + Roboter Gmbh, 8900 Augsburg | Vorrichtung zum aussenseitigen halten und fuehren von versorgungsleitungen zu bewegten werkzeugen von manipulatoren |
| DE8814906U1 (ko) * | 1988-11-30 | 1989-01-26 | Reis Gmbh & Co. Maschinenfabrik, 8753 Obernburg, De | |
| DE9103497U1 (ko) * | 1991-03-21 | 1991-06-20 | Kuka Schweissanlagen + Roboter Gmbh, 8900 Augsburg, De | |
| US5474268A (en) * | 1992-02-10 | 1995-12-12 | Yu; Michael | Agricultural and industrial tie |
| US5777267A (en) * | 1996-06-28 | 1998-07-07 | Abb Flexible Automation, Inc. | Harness assembly to provide signals to end effector |
| US5816736A (en) * | 1997-03-20 | 1998-10-06 | Flex-Cable, Inc. | Robot arm assembly |
| US5937488A (en) * | 1998-07-13 | 1999-08-17 | Tyton Hellerman Corporation | Brakeline to axle clamp |
| DE29902947U1 (de) * | 1999-02-19 | 1999-07-08 | Kuka Roboter Gmbh | Roboterteil |
| GB9915844D0 (en) * | 1999-07-06 | 1999-09-08 | Lasalle Products & Services Di | Improvements in or relating to cable protectors |
| US6431018B1 (en) * | 1999-09-09 | 2002-08-13 | Fanuc Ltd. | Guide device for wiring member and/or piping member and robot with guide device |
| JP2001169443A (ja) * | 1999-12-02 | 2001-06-22 | Sumitomo Wiring Syst Ltd | 部材固定用クリップ |
| DE20109419U1 (de) * | 2001-06-06 | 2001-08-23 | Leoni Protec Cable Systems Gmb | Roboter mit einer eine Spannschelle aufweisenden Haltevorrichtung zum Positionieren eines Schlauches längs des Roboters und entsprechende Haltevorrichtung sowie Spannschelle |
| JP4142304B2 (ja) * | 2001-10-22 | 2008-09-03 | 株式会社安川電機 | アーク溶接用ロボット |
| DE10222732A1 (de) * | 2002-05-23 | 2003-12-18 | Rasmussen Gmbh | Schelle zum Festklemmen eines Schlauches auf einem Rohr mittels eines Federbandes, dessen Endabschnitte im aufgeweiteten Zustand verriegelbar sind, und Entriegelungsvorrichtung für die Schelle |
| US7306755B2 (en) * | 2005-02-28 | 2007-12-11 | Delphi Technologies, Inc. | Method of fabricating a strap with rotatably mounted clip |
| SE528956C2 (sv) * | 2005-09-06 | 2007-03-20 | Aba Sweden Ab | Fixering för slangklämma |
| JP4680700B2 (ja) | 2005-07-07 | 2011-05-11 | 株式会社キャプテン インダストリーズ | ケーブル取付け装置 |
| BRPI0604028B1 (pt) * | 2006-09-04 | 2019-12-24 | Embraco Ind De Compressores E Solucoes Em Refrigeracao Ltda | abraçadeira para conexões tubulares em pequenos sistemas de refrigeração |
| US7861982B1 (en) * | 2006-11-16 | 2011-01-04 | International Clamps, Inc. | Subsea clamp for hoses and control lines |
| US7520475B2 (en) * | 2007-01-18 | 2009-04-21 | Klo-Shure, Inc. | Pipe insulating coupling with integrated mounting clamp and closure mechanism |
| DE102007008985B4 (de) * | 2007-02-23 | 2016-09-08 | Kuka Roboter Gmbh | Haltevorrichtung für eine Energiezuführung |
| US7614593B2 (en) * | 2007-05-17 | 2009-11-10 | International Clamps, Inc. | Lined clamp for hoses and control lines |
| US7546985B1 (en) | 2007-12-10 | 2009-06-16 | Kwang Sul Choi | Cable guide device for industrial robot |
| US8998150B2 (en) * | 2010-01-29 | 2015-04-07 | The Subsea Company | Retrofit clamp for MUX, umbilicals and IWOCS |
| DE102010043121A1 (de) * | 2010-10-29 | 2012-05-03 | Siemens Aktiengesellschaft | Roboteranordnung mit einem Führungselement für Versorgungsleitungen |
| FR2990744B1 (fr) * | 2012-05-16 | 2014-06-13 | Airbus Operations Sas | Support pour le cheminement de conduits dans une aile d'aeronef |
| CN203348747U (zh) | 2013-06-26 | 2013-12-18 | 江苏新丰电子有限公司 | 一种新型的带状夹紧装置 |
| US9512941B2 (en) * | 2013-07-23 | 2016-12-06 | Hawken Holdings, Llc | Conduit guide apparatus, system, and method |
| US9534709B2 (en) * | 2013-12-05 | 2017-01-03 | Erico International Corporation | Plumbing bracket assembly |
| CN203611261U (zh) * | 2013-12-10 | 2014-05-28 | 上海发那科机器人有限公司 | 一种工业机器人管线结构及包括该管线结构的机器人手臂 |
| US10107419B2 (en) * | 2014-03-31 | 2018-10-23 | Abey Australia Pty. Ltd. | Pipe clips and brackets therefor |
| BR112017001415A2 (pt) * | 2014-07-22 | 2017-11-21 | Ameriforge Group Inc | fechamentos de modo de falha múltipla e métodos relacionados |
| GB2537360B (en) * | 2015-04-10 | 2017-08-30 | Subsea 7 Norway As | Installing Heated Subsea Pipelines |
| CN204692753U (zh) * | 2015-06-17 | 2015-10-07 | 国网山东省电力公司潍坊供电公司 | 旁路电缆固定支架 |
| CN105370995B (zh) * | 2015-12-17 | 2017-07-04 | 安徽江淮汽车集团股份有限公司 | 一种管线固定扎带总成 |
| US10415609B2 (en) * | 2016-03-29 | 2019-09-17 | Bitzer Kuehlmaschinenbau Gmbh | Insulating sleeve |
| GB201610790D0 (en) * | 2016-06-21 | 2016-08-03 | Advanced Insulation Plc | Mounting arrangement |
| FR3059388B1 (fr) * | 2016-11-28 | 2018-11-16 | Financiere De Beaumont - Fdb | Dispositif concu pour fixer au moins un cable le long d'un conduit, et procede de mise en œuvre d'un tel dispositif |
-
2017
- 2017-03-31 DE DE102017107043.5A patent/DE102017107043A1/de active Pending
-
2018
- 2018-02-23 WO PCT/DE2018/200015 patent/WO2018177482A1/de unknown
- 2018-02-23 US US16/496,217 patent/US11446830B2/en active Active
- 2018-02-23 EP EP18714434.0A patent/EP3577380B1/de active Active
- 2018-02-23 KR KR1020197031795A patent/KR102464741B1/ko active IP Right Grant
- 2018-02-23 CN CN201880021189.9A patent/CN110573780B/zh active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20090126162A1 (en) * | 2004-04-20 | 2009-05-21 | Phil Head | Cable Clamps |
| KR100638637B1 (ko) * | 2005-10-19 | 2006-10-27 | 기아자동차주식회사 | 와이어링 간격유지용 밴드케이블 |
| KR20080001094A (ko) * | 2006-06-29 | 2008-01-03 | 최광술 | 산업용 로봇의 케이블 가이드장치 |
| JP2008023680A (ja) * | 2006-07-24 | 2008-02-07 | Yutaka Electronics Industry Co Ltd | ロボットアーム用ブラケット及びロボットアーム |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2018177482A1 (de) | 2018-10-04 |
| US11446830B2 (en) | 2022-09-20 |
| CN110573780A (zh) | 2019-12-13 |
| CN110573780B (zh) | 2022-04-12 |
| US20200055201A1 (en) | 2020-02-20 |
| EP3577380B1 (de) | 2022-10-26 |
| EP3577380A1 (de) | 2019-12-11 |
| KR102464741B1 (ko) | 2022-11-09 |
| DE102017107043A1 (de) | 2018-10-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US5816736A (en) | Robot arm assembly | |
| KR100540605B1 (ko) | 케이블류의 보호안내 가이드 | |
| US8662456B2 (en) | Cable protection and guide device | |
| JPS5922363Y2 (ja) | ケ−ブル、導線、ホ−スなどの保持装置 | |
| US20220243842A1 (en) | Multi-conduit flexible retention mechanism | |
| US9482370B2 (en) | Line clamp assembly and method of use | |
| JP2008275059A (ja) | ケーブル類保護案内装置 | |
| US20110252913A1 (en) | Umbilical member arrangement unit of robot arm section | |
| CN106425921B (zh) | 通用支撑夹具 | |
| US10316991B2 (en) | Wide range edge mounting clamp | |
| KR102464741B1 (ko) | 산업 로봇 아암에 대한 부착을 위한 공급 파이프 및/또는 공급 라인을 위한 부착 장치 | |
| US6230859B1 (en) | Cable assembly holder for an industrial robot | |
| JP2003348742A (ja) | 長尺部材の取付具 | |
| EP1448924B1 (en) | Sleeve of a gland assembly | |
| KR100788521B1 (ko) | 케이블 보호 스프링 및 케이블 보호 스프링의 고정방법 | |
| CN113167307A (zh) | 夹具 | |
| US20220397214A1 (en) | Guiding device for long object | |
| US10663087B2 (en) | Power tool cable mount | |
| CN109333587B (zh) | 一种自动冲压线机器人管束装置 | |
| CN210121859U (zh) | 电缆固定装置及机器人 | |
| JP2022526745A (ja) | 締結部品 | |
| CN213304858U (zh) | 一种多线束卡箍组件 | |
| CN216731888U (zh) | 机器人管线包拉带式固定座 | |
| KR200223916Y1 (ko) | 케이블 고정용 클램프 | |
| CN211605941U (zh) | 用于约束线缆的卡簧、机器人关节和协作机器人 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| AMND | Amendment | ||
| E902 | Notification of reason for refusal | ||
| AMND | Amendment | ||
| E902 | Notification of reason for refusal | ||
| AMND | Amendment | ||
| E601 | Decision to refuse application | ||
| AMND | Amendment | ||
| X701 | Decision to grant (after re-examination) |