KR20180069090A - 꼬임-비민감성 형상 센서를 사용하여 절대적 3-차원 측정을 위한 방법 및 시스템 - Google Patents
꼬임-비민감성 형상 센서를 사용하여 절대적 3-차원 측정을 위한 방법 및 시스템 Download PDFInfo
- Publication number
- KR20180069090A KR20180069090A KR1020187016375A KR20187016375A KR20180069090A KR 20180069090 A KR20180069090 A KR 20180069090A KR 1020187016375 A KR1020187016375 A KR 1020187016375A KR 20187016375 A KR20187016375 A KR 20187016375A KR 20180069090 A KR20180069090 A KR 20180069090A
- Authority
- KR
- South Korea
- Prior art keywords
- shape sensor
- proximal end
- cannula
- joint
- surgical instrument
- Prior art date
Links
- 238000000034 method Methods 0.000 title description 40
- 238000005259 measurement Methods 0.000 title description 12
- 230000033001 locomotion Effects 0.000 claims abstract description 16
- 238000003780 insertion Methods 0.000 claims description 8
- 230000037431 insertion Effects 0.000 claims description 8
- 239000000463 material Substances 0.000 claims description 7
- 239000000835 fiber Substances 0.000 description 46
- 239000013307 optical fiber Substances 0.000 description 31
- 230000036544 posture Effects 0.000 description 22
- 230000008569 process Effects 0.000 description 14
- 239000013598 vector Substances 0.000 description 13
- 230000015654 memory Effects 0.000 description 11
- 239000011159 matrix material Substances 0.000 description 10
- 230000008859 change Effects 0.000 description 6
- 230000006870 function Effects 0.000 description 6
- 230000010354 integration Effects 0.000 description 5
- 238000001356 surgical procedure Methods 0.000 description 5
- 238000004364 calculation method Methods 0.000 description 4
- 238000004590 computer program Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- 238000007796 conventional method Methods 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 229920002313 fluoropolymer Polymers 0.000 description 3
- 230000010365 information processing Effects 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 238000002324 minimally invasive surgery Methods 0.000 description 3
- 238000002168 optical frequency-domain reflectometry Methods 0.000 description 3
- 238000001069 Raman spectroscopy Methods 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 230000005672 electromagnetic field Effects 0.000 description 2
- 238000000968 medical method and process Methods 0.000 description 2
- 238000000253 optical time-domain reflectometry Methods 0.000 description 2
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 2
- 239000004810 polytetrafluoroethylene Substances 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000005374 Kerr effect Effects 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000001427 coherent effect Effects 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 230000000875 corresponding effect Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 239000012636 effector Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 230000005764 inhibitory process Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000012978 minimally invasive surgical procedure Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- HLXZNVUGXRDIFK-UHFFFAOYSA-N nickel titanium Chemical compound [Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni] HLXZNVUGXRDIFK-UHFFFAOYSA-N 0.000 description 1
- 229910001000 nickel titanium Inorganic materials 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- -1 polytetrafluoroethylene Polymers 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 238000002432 robotic surgery Methods 0.000 description 1
- 239000000523 sample Substances 0.000 description 1
- 239000003351 stiffener Substances 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 238000000844 transformation Methods 0.000 description 1
Images






Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/009—Flexible endoscopes with bending or curvature detection of the insertion part
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/24—Surgical instruments, devices or methods, e.g. tourniquets for use in the oral cavity, larynx, bronchial passages or nose; Tongue scrapers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- G01D5/32—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light
- G01D5/34—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells
- G01D5/353—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells influencing the transmission properties of an optical fibre
- G01D5/35306—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells influencing the transmission properties of an optical fibre using an interferometer arrangement
- G01D5/35309—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells influencing the transmission properties of an optical fibre using an interferometer arrangement using multiple waves interferometer
- G01D5/35316—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light with attenuation or whole or partial obturation of beams of light the beams of light being detected by photocells influencing the transmission properties of an optical fibre using an interferometer arrangement using multiple waves interferometer using a Bragg gratings
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L63/00—Network architectures or network communication protocols for network security
- H04L63/04—Network architectures or network communication protocols for network security for providing a confidential data exchange among entities communicating through data packet networks
- H04L63/0428—Network architectures or network communication protocols for network security for providing a confidential data exchange among entities communicating through data packet networks wherein the data content is protected, e.g. by encrypting or encapsulating the payload
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L63/00—Network architectures or network communication protocols for network security
- H04L63/08—Network architectures or network communication protocols for network security for authentication of entities
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L63/00—Network architectures or network communication protocols for network security
- H04L63/08—Network architectures or network communication protocols for network security for authentication of entities
- H04L63/0807—Network architectures or network communication protocols for network security for authentication of entities using tickets, e.g. Kerberos
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W12/00—Security arrangements; Authentication; Protecting privacy or anonymity
- H04W12/06—Authentication
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W12/00—Security arrangements; Authentication; Protecting privacy or anonymity
- H04W12/06—Authentication
- H04W12/068—Authentication using credential vaults, e.g. password manager applications or one time password [OTP] applications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/80—Services using short range communication, e.g. near-field communication [NFC], radio-frequency identification [RFID] or low energy communication
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00005—Cooling or heating of the probe or tissue immediately surrounding the probe
- A61B2018/00011—Cooling or heating of the probe or tissue immediately surrounding the probe with fluids
- A61B2018/00029—Cooling or heating of the probe or tissue immediately surrounding the probe with fluids open
- A61B2018/00035—Cooling or heating of the probe or tissue immediately surrounding the probe with fluids open with return means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/18—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves
- A61B18/20—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using laser
- A61B2018/2005—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using laser with beam delivery through an interstitially insertable device, e.g. needle
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/18—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves
- A61B18/20—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using laser
- A61B2018/2015—Miscellaneous features
- A61B2018/202—Laser enclosed in a hand-piece
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2061—Tracking techniques using shape-sensors, e.g. fiber shape sensors with Bragg gratings
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/301—Surgical robots for introducing or steering flexible instruments inserted into the body, e.g. catheters or endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Medical Informatics (AREA)
- Heart & Thoracic Surgery (AREA)
- Biomedical Technology (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Computer Security & Cryptography (AREA)
- Physics & Mathematics (AREA)
- Robotics (AREA)
- General Physics & Mathematics (AREA)
- Computer Hardware Design (AREA)
- General Engineering & Computer Science (AREA)
- Computing Systems (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Otolaryngology (AREA)
- Pulmonology (AREA)
- Biophysics (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Endoscopes (AREA)
- Surgical Instruments (AREA)
Abstract
장치는 기준 고정부를 포함한다. 기준 고정부는 조인트, 및 조인트의 동작을 추적하는 조인트 추적기를 포함한다. 장치는 또한 수술 기구를 포함한다. 조인트와 수술 기구 사이에 줄이 연결된다. 형상 센서가 기준 고정부로부터 조인트와 줄을 통해서 수술 기구까지 연장된다. 형상 센서는 실질적으로 꼬임을 갖지 않는다. 조인트 추적기는 조인트의 동작을 측정한다. 조인트 추적기로부터의 정보와 함께 형상 센서로부터의 정보는 기준 고정부에 대한 절대적 3-차원 정보를 제공하는데, 즉 고정된 보편 기준 프레임에서 절대적 3-차원 정보를 제공한다.
Description
본 출원은 2010년 2월 12일 제출된 미국 가 출원 제61/304,094호의 Giuseppe M. Prisco, Theodore W. Rogers, Vincent Duindam, Myriam J. Curet, Catherine J. Mohr, Katherine D. Stoy가 발명자인 발명 명칭 "METHOD AND SYSTEM FOR ABSOLUTE THREE-DIMENSIONAL MEASUREMENTS USING A TWIST-INSENSITIVE SHAPE SENSOR"의 우선권 및 이익을 주장하며, 이것은 그 전체가 본원에 참고자료로 포함된다.
기술분야
본 발명의 양태들은 최소 침습 수술 기구를 특정할 수 있는 정보를 감지하는 것에 관한 것이며, 더 구체적으로 최소 침습 수술 기구의 형상 정보 및 절대적 3-차원 자세 정보를 얻기 위해 사용되는 형상 센서에 관한 것이다.
최소 침습 수술에서 반복되는 문제는 수술에 사용되는 기구의 자세 및/또는 형상을 결정하는 것이다. 또한, 환자 몸 안의 해부학적 위치를 결정하고, MRI 영상, 또는 다른 영상과 수술 도중 촬영된 환자의 영상을 상호관련시키는 것은 3-차원 측정을 필요로 한다.
가요성 수술 기구에 대한 형상 정보를 얻기 위해 사용되는 현재 방법들은 카메라와 화면에 기반한 방법, 관성 및 자이로스코프 센서에 기반한 방법, 및 전자기장 센서에 기반한 방법을 포함한다. 또한, 두 상이한 위치를 터치해서 이 두 위치의 상대적 관계를 결정할 수 있는 기계적 시스템도 있다.
이러한 방법은 정밀성 및 정확성, 수술 환경에 대한 민감성, 실제 적용시의 침습성을 감지하는데 제한적이며, 일반적으로 수술 기구에서 특정 수의 불연속 지점들에 대한 위치 정보만을 제공할 수 있다. 또한, 측정된 거리는 절대적 거리가 아니라 상대적 거리이다.
광섬유 형상 센서가 알려져 있다. 예를 들어, 미국특허 제5,798,521호(1997년 2월 27일 제출), 미국특허 제6,389,187 B1호(1998년 6월 17일 제출), 미국 특허출원 공개 US 2006/0013523 A1(2005년 7월 13일 제출) 및 Roger G. Duncan et al., Characterization of a Fiber-Optic Shape and Position Sensor, Smart Structures and Materials 2006:Smart Sensor Monitoring Systems and Applications(D. Inaudi et al. eds.), 6167 Proceedings of SPIE 616704(2006.3.16)를 참조하며, 이들 모두 본원에 참고자료로 포함된다. 광섬유 형상 센서는 최소 침습 수술 기구에서 조인트 각도의 감지에 사용되었다. 예를 들어, 미국 특허출원 공개 US 2007/0156019 A1(2006년 7월 20일 제출) 그리고 NASA Tech Briefs, NASA-Inspired Shape-Sensing Fibers Enable Minimally Invasive Surgery(2008.2.1), http://www.techbriefs.com /content/view/2585/를 참조하며, 이들 모두 본원에 참고자료로 포함된다.
전형적으로, 광섬유 형상 센서는 광 시간 영역 반사파 측정법(OTDR)이나 광 주파수 영역 반사파 측정법(OFDR)을 통해서 작동한다. 대부분의 접근방식은 광섬유의 형상 변화에 의해 야기된 후방산란된 광의 변화를 측정하는 후방산란법을 사용한다. 사용된 산란 메커니즘은 레일리 산란, 라만 산란, 브릴루앙 산란, 및 형광 산란을 포함한다. 또한, 광섬유 브래그 격자 및 Kerr 효과도 형상-감지 센서에서 사용되었다. 일부 광섬유 브래그 격자 형상 센서는 꼬임에 비민감성이다. 결국 형상 센서가 꼬인 경우, 꼬인 형상 센서를 사용하여 얻어진 자세 정보는 정확하지 않다.
다른 기술들도 또한 형상 감지에 사용되었다. 예를 들어, 내시경의 위치를 결정하기 위해서 전자기장이 내시경에 장착된 센서와 함께 사용되었다. 미국 특허출원 공개 US 2007/0249901 A1(2006년 3월 28일 제출; "Instrument Having Radio Frequency Identification Systems and Methods for Use"을 개시)을 참조하며, 이것은 그 전체가 참고자료로 본원에 포함된다. 또한, 피에조저항 가요성 형상 센서의 저항 변화를 사용하여 형상 변화를 측정했다.
한 양태에서, 장치는 기준 고정부를 포함한다. 기준 고정부는 조인트 및 한 양태에서는 조인트의 동작을 추적하는 조인트 추적기를 포함한다. 또한, 장치는 수술 기구를 포함한다. 조인트와 수술 기구 사이에 줄이 연결된다. 형상 센서가 기준 고정부로부터 조인트와 줄을 통해서 수술 기구까지 연장된다. 형상 센서는 실질적으로 꼬임을 갖지 않는다.
형상 센서로부터의 정보는 조인트 추적기로부터의 정보와 함께 기준 고정부에 대해 절대적 3-차원 정보를 제공하는데, 즉 고정된 보편 기준 프레임에서 절대적 3-차원 정보를 제공한다. 고정된 보편 기준 프레임 내의 이러한 절대적 3-차원 정보는 수술 기구의 요소들 간의 상대적 거리, 수술 기구들 간의 상대적 거리, 또는 의료 과정을 받는 환자에서 위치들 간의 상대적 거리를 제공하는 종래의 방법으로부터 얻는 정보와 대조된다.
고정된 보편 기준 프레임에서 절대적 3-차원 형상 및 자세 데이터를 얻을 수 있는 능력은 의료 과정에 새로운 역량 수준을 제공한다. 또한, 고정된 보편 기준 프레임 내의 절대적 3-차원 자세 데이터(위치 및 배향)는, 예를 들어 고정된 보편 기준 프레임에서 여러 영상들의 정합 및 필요에 따라 영상들의 중첩을 허용하여 수술 과정에서 더 많은 정보를 쉽게 얻을 수 있다.
한 양태에서, 조인트는 단지 1의 자유도를 가진다. 예를 들어, 조인트는 롤 조인트이고, 1의 자유도는 롤이다. 다른 예에서, 조인트는 볼 및 스크류 조인트를 포함한다. 또 다른 양태에서, 조인트는 1의 자유도를 포함하는 다중 자유도를 가진다.
조인트 또는 조인트들의 조합에서 자유도의 수는 의사가 수술 기구를 움직이는 것이 쉽도록 선택된다. 수술 기구와 기준 구조 사이에 있는 토션에 대해 강성인 줄은 의사에 의한 수술 기구의 조작을 억제할 수 있다. 따라서, 기준 구조에서 조인트 또는 조인트들의 조합을 사용하여 수술 기구의 모든 자유도를 통해 수술 기구의 조작을 용이하게 할 수 있다. 수술 기구의 조작이 줄에 의해서 억제되지 않거나, 또는 수술 기구의 사용 중에 이러한 억제가 유의하지 않은 양태에서는, 0의 자유도를 가진 조인트가 기준 구조에서 사용될 수 있고, 조인트 추적기는 필요하지 않다.
줄은 줄의 길이방향 축을 따라 연장된 내강을 한정하며, 형상 센서가 내강을 통해서 연장된다. 한 양태에서, 줄은 토션에 대해 강성이다.
다른 양태에서, 라이너가 줄 안의 내강을 통해서 연장된다. 라이너는 라이너 내강을 포함하며, 형상 센서가 라이너 내강을 통해서 연장된다. 라이너는 형상 센서가 라이너 안에서 자유롭게 회전할 수 있도록 하는 재료로 제조된다. 한 양태에서, 재료는 플루오르화 폴리머이다.
다른 양태에서, 프로세서는 기준 고정부에 연결된 조인트 추적기로부터 얻은 정보를 처리해서 제1 자세를 생성한다. 조인트 추적기는 줄에 연결된 조인트의 동작을 측정한다. 줄은 조인트와 수술 기구를 연결한다. 기준 고정부는 최소 침습 수술을 위해 고정된 보편 기준 프레임을 한정할 수 있는 위치에 고정된다.
또한, 프로세서는 조인트와 줄을 통해서 연장된 형상 센서로부터 얻은 정보를 처리해서 제2 자세 정보를 생성한다. 프로세서는 제1 자세 정보와 제2 자세 정보를 사용해서 고정된 보편 기준 프레임에서 수술 기구의 근위 부분의 절대적 3-차원 자세를 생성한다.
한 양태에서, 형상 센서는 수술 기구의 원위 부분까지 연장된다. 프로세서가 형상 센서의 이 구간으로부터 얻은 정보를 처리해서 제3 자세 정보를 생성한다. 프로세서는 제1 자세 정보, 제2 자세 정보 및 제3 자세 정보를 사용해서 고정된 보편 기준 프레임에서 수술 기구의 원위 부분의 절대적 3-차원 자세를 생성한다. 또한, 프로세서는 고정된 보편 기준 프레임에서 수술 기구의 형상을 생성한다.
한 양태에서, 수술 기구는 내시경과 같은 가요성 수술 기구이다. 다른 양태에서, 수술 기구는 캐뉼라이다. 또 다른 양태에서, 수술 기구는 뱀 모양 로봇 수술 기구이며, 이것은 가요성 수술 기구의 한 예이다.
다른 양태에서, 방법은 수술 기구와 줄의 원단부를 연결한다. 줄의 근단부는 기준 구조의 조인트에 연결된다. 기준 구조는 또한 조인트의 동작을 측정하는 조인트 추적기를 포함한다. 이 방법은 형상 센서를 조인트와 줄을 통해서 수술 기구까지 연장시킨다. 형상 센서는 기준 구조에 대해 수술 기구의 일부의 절대적 3-차원 자세를 결정하기 위한 정보를 제공한다.
한 양태에서, 본 방법에서 수술 기구는 캐뉼라이며, 상기 방법은 또한 기준 구조와 최소 침습 원격조종 수술 시스템의 조작기를 지지하는 암을 연결하는 단계를 포함한다.
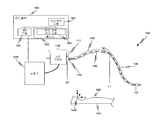
도 1은 최소 침습 수술 시스템의 일부의 도해로서, 이것은 고정된 보편 기준 프레임에서 절대적 3-차원 자세 및 형상 데이터를 생성하여 수술 기구를 특정할 수 있는 요소들을 포함한다.
도 2a는 제1 비-원형 단면을 가진 형상 센서와 줄의 단면도이다.
도 2b는 제2 비-원형 단면을 가진 형상 센서와 줄의 단면도이다.
도 3은 기준 고정부의 한 양태의 투시 단면도이다.
도 4a는 최소 침습 원격조종 수술 시스템의 일부의 도해로서, 이것은 복수의 수술 기구에 대해, 고정된 보편 기준 프레임에서 절대적 3-차원 자세를 생성할 수 있는 요소들을 포함한다.
도 4b는 또 다른 복수의 수술 기구에 대해, 고정된 보편 기준 프레임에서 절대적 3-차원 자세 및 형상 데이터를 생성할 수 있는 요소들을 포함한다.
도 5는 광섬유 코어의 도해이다.
도 6은 예시적인 기준 프레임을 함께 나타낸 광섬유의 근단부의 도해이다.
도 7은 형상 감지에 사용된 광섬유에서 구간 시작 위치에서의 기준 프레임을 예시하는 도해이다.
도면에서 참조번호의 첫 번째 숫자는 해당 참조번호의 요소가 처음 나타났던 도면을 나타낸다.
도 2a는 제1 비-원형 단면을 가진 형상 센서와 줄의 단면도이다.
도 2b는 제2 비-원형 단면을 가진 형상 센서와 줄의 단면도이다.
도 3은 기준 고정부의 한 양태의 투시 단면도이다.
도 4a는 최소 침습 원격조종 수술 시스템의 일부의 도해로서, 이것은 복수의 수술 기구에 대해, 고정된 보편 기준 프레임에서 절대적 3-차원 자세를 생성할 수 있는 요소들을 포함한다.
도 4b는 또 다른 복수의 수술 기구에 대해, 고정된 보편 기준 프레임에서 절대적 3-차원 자세 및 형상 데이터를 생성할 수 있는 요소들을 포함한다.
도 5는 광섬유 코어의 도해이다.
도 6은 예시적인 기준 프레임을 함께 나타낸 광섬유의 근단부의 도해이다.
도 7은 형상 감지에 사용된 광섬유에서 구간 시작 위치에서의 기준 프레임을 예시하는 도해이다.
도면에서 참조번호의 첫 번째 숫자는 해당 참조번호의 요소가 처음 나타났던 도면을 나타낸다.
본 발명의 양태들은 (i) 조인트(110), 및 조인트(110)의 동작을 추적하는 조인트 추적기(111)를 포함하는 기준 고정부(115)(도 1)와 (ii) 수술 기구(130)의 자세 정보를 제공하는 형상 센서(140)의 조합을 포함하는 장치(100)를 포함한다. 조인트 추적기(111)로부터 얻은 정보와 형상 센서(140)로부터 얻은 정보를 사용해서 프로세서 모듈(182)이 위치 Lref에서 고정된 보편 기준 프레임에서 수술 기구(130)의 절대적 3-차원 형상과 수술 기구(130)의 절대적 3-차원 자세를 생성한다.
하기 더 완전히 설명된 대로, 고정된 보편 기준 프레임에서 위치 Lref는 의사가 원하는 위치에서 특정한 과정을 위해 고정될 수 있다. 예를 들어, 위치 Lref에서 고정된 보편 기준 프레임은 수술을 받는 환자에 대해 고정되거나, 최소 침습 원격조종 수술 시스템의 조작기에 대해 고정되거나 하는 등이다. 일부 과정에서, 위치 L0과 위치 Lref는 동일한 위치일 수 있다.
전형적으로, 기준 고정부(115)는 위치 L0에 장착된다. 위치 L0의 자세와 고정된 보편 기준 프레임 사이의 관계는 알려져 있다. 이로써 컨트롤러(180)가 위치 Lref에서 고정된 보편 기준 프레임에 위치 L0의 자세를 맵핑한다.
한 양태에서, 기준 고정부(115)가 위치 L0에서 제자리에 고정된 후, 다른 위치에 위치 LreF가 배정된다. 예를 들어, Lref에서 고정된 보편 기준 프레임이 환자(190)의 입에 있도록 선택되며, 이때 x 축과 z 축은 환자의 시상면에 있고, z 축은 수술대(191)에 위로 수직인 방향이며, x 축은 환자의 발치를 향하고 있다. 다음에, 정합 단계에서 수술 기구(130)의 끝을 사용해서 환자(190)와 수술대(191) 상의 몇 개의 미리 정해진 기준점을 터치한다. 프로세서가 기준 고정부(115)에 대한 이들 기준점들의 측정된 위치를 사용해서 고정된 보편 기준 프레임 Lref에 대해 위치 L0에서 프레임의 위치 및 배향을 산출한다.
이 예에서, 위치 Lref는 환자의 입에 있으며, 형상 전송이 시작되는 위치 L0의 자세가 위치 Lref에서 고정된 보편 기준 프레임에 맵핑된다. 이로써 기준 고정부(115) 상의 위치에서 기준 프레임에 대한 하기 더 완전히 설명된 절대적 측정값이 위치 Lref에서 고정된 보편 기준 프레임에 맵핑된다. 고정부(115)에서 위치 L0에 위치된 기준 프레임 내의 절대적 측정값은 하기 더 완전히 설명된 대로 이 예에서는 환자 위의 위치 Lref에서 고정된 보편 기준 프레임 내에서 절대적 측정값에 따라 자동으로 맵핑된다.
위치 Lref에서 고정된 보편 기준 프레임이 수술을 받는 환자에 대해 고정된 경우, 장치(100)는 환자에 대한 수술 기구(130)의 절대적 3-차원 형상 및 자세 데이터를 제공한다. 이 절대적 정보는 수술 기구의 요소들 사이의 상대적 거리, 수술 기구들 사이의 상대적 거리, 또는 의료 과정을 받는 환자에서 위치들 사이의 상대적 거리를 제공하는 종래의 방법으로부터 얻는 정보와 대조된다.
고정된 보편 기준 프레임에서 절대적 3-차원 형상 및 자세 데이터를 얻을 수 있는 능력은 의료 과정에 새로운 역량 수준을 제공한다. 또한, 고정된 보편 기준 프레임에 대한 절대적 3-차원 자세 데이터(위치 및 배향)는, 예를 들어 고정된 보편 기준 프레임에서 여러 영상들의 정합 및 필요에 따라 영상들의 중첩을 허용하여 수술 과정에서 더 많은 정보를 쉽게 얻을 수 있다.
다시, 도 1의 양태에서, 기준 고정부(115)는 적어도 1의 자유도를 가진 조인트(110)와 조인트 추적기(111)를 포함한다. 기준 고정부(115)는 관심의 위치, 예를 들어 수술대의 일부, 최소 침습 원격조종 수술 시스템 상의 위치 등에 고정되도록 적합하게 된다. 기준 고정부(115)를 고정하는데 사용되는 수단은 사용하는 동안 기준 고정부를 원하는 위치에 고정 부착하는 어떤 종래의 수단이다.
기준 고정부(115)의 조인트(110)와 수술 기구(130) 사이에 줄(120)이 연결된다. 한 양태에서, 줄(120)은 기준 고정부(115)의 조인트(110)에 연결된 근단부를 가진다. 줄(120)의 원단부는 수술 기구(130)에 연결된다. 1의 자유도의 줄(120)의 근단부의 동작은 1의 자유도의 조인트(110)의 동작을 가져온다. 줄(120)의 특성은 하기 더 완전히 설명된다. 조인트(110)의 움직임은 의사가 1의 자유도로 수술 기구를 조작하는 것을 보조하며, 조인트(120)는 해당 자유도에서 줄(120)을 쉽게 움직일 수 있다.
줄(120)의 근단부의 동작이 조인트(110)로 전달된다. 조인트 추적기(111)가 조인트(110)의 동작을 측정해서 컨트롤러(180)에 정보를 제공한다. 이 예에서, 단일 자유도를 가진 조인트가 고려되며, 하기 더 완전히 설명된 예에서 상기 조인트는 롤 조인트이다.
단일 자유도를 가진 조인트의 사용은 단지 예시일 뿐이며, 제한으로서 사용되지 않는다. 하기 더 완전히 설명된 대로, 기준 고정부에서 하나 이상의 자유도가 측정될 수 있다. 롤 조인트의 사용 역시 단지 예시일 뿐이다. 사용될 수 있는 다른 조인트는 볼 및 스크류 조인트이다. 본 명세서의 관점에서, 당업자는 기준 고정부에서 조인트 또는 조인트들의 조합을 실시할 수 있으며, 이로써 적절한 수의 자유도를 가지게 됨으로써 줄에 연결된 상태에서 수술 기구의 손쉬운 사용을 이룰 수 있다.
수술 기구(130)는 다수의 상이한 수술 기구들 중 어느 하나일 수 있다. 예를 들어, 수술 기구는 복강경 과정에서 사용되는 기구, 자연 개구부를 통한 내시경 수술(NOTES)에서 사용되는 기구, 캐뉼라, 뱀 모양 로봇 수술 기구, 기준 위치를 확립하는데 사용되는 프로브, 또는 가요성 의료 기구에 대한 절대적 3-차원 자세 및 형상 정보가 유용한 의료 과정에서 사용되는 어떤 가요성 의료 기구일 수 있다.
도 1의 양태에서, 수술 기구(130)는 원단부에 단부 작동기를 가진 가요성 수술 기구로서 표시된다. 이것은 단지 예시일 뿐이며, 수술 기구(130)를 가요성 수술 기구에만 제한하는 것은 아니다.
기준 고정부(115)로부터 조인트(110)와 조인트 추적기(111)와 줄(120)을 통해서 수술 기구(13) 쪽으로 수술 기구(130)의 원위 부분까지 형상 센서(140)가 연장된다. 도 1의 양태에서, 형상 센서(140)는 각 기준 고정부(115)의 내강, 조인트(110)와 조인트 추적기(111), 줄(120) 및 수술 기구(130)를 통해 지나가는 것으로 예시된다. 이것은 단지 예시일 뿐이며, 이 특정한 예에 제한되는 것은 아니다. 본 명세서의 관점에서, 당업자는 조인트(110)와 조인트 추적기(111)를 통해서, 줄(120)과 수술 기구(130)를 통해서 기준 고정부(115)에 대해 형상 센서(140)를 배치함으로써, 사용된 수술 기구의 절대적 3-차원 자세 및 형상을 결정하기 위해 필요한 정보를 제공할 수 있다.
한 예에서, 형상 센서(140)는 형상 감지 광섬유이며, 광 주파수 영역 반사파 측정법이 호출기(170)에 이용된다. 특히, 형상 감지 광섬유는 광섬유 브래그 격자를 이용한다. 광섬유 브래그 격자의 사용은 단지 예시일 뿐이며, 후방산란을 생성하는데 있어서 이 특정한 메커니즘에 제한되는 것은 아니다. 본 명세서의 관점에서, 레일리 산란, 라만 산란 및 브릴루앙 산란을 포함하는 다른 광섬유 형상 감지 기술들도 사용될 수 있지만, 이들에 제한되는 것은 아니다.
또한, 형상 감지 광섬유의 사용 역시 예시이며 제한으로서 사용되지 않는다. 형상 센서(140)의 특정한 타입에 따라 해당 형상 센서에 맞는 호출기가 사용된다. 호출기로부터의 데이터는 하기 더 완전히 설명된 것들과 동일한 기술들을 사용하여 처리되며, 이로써 절대적 3-차원 데이터가 얻어진다. 따라서, 이미 언급된 대로, 이 예는 형상 감지 광섬유를 사용해서 절대적 3-차원 자세 정보를 생성하는 예시이며, 설명된 특정한 형상 감지 광섬유에 제한되는 것은 아니다.
한 양태에서, 형상 센서(140)는 다중-코어 형상 감지 광섬유를 사용하여 실시된다. 한 예에서, 광섬유는 3개 코어 광섬유이며, 이것은 하기 더 완전히 설명된다. 다른 구체예에서, 다양한 수의 코어가 사용될 수 있다.
호출기(170)가 형상 센서(140)의 광섬유를 호출해서 컨트롤러(180)의 입력/출력 모듈(181)에 형상 정보를 제공한다. 프로세서 모듈(182)의 프로세서가 형상 정보 처리 모듈(184)을 사용해서 입력/출력 모듈(181)에 의해서 수신된 정보를 처리한다.
조인트 추적기(111)로부터 얻은 정보를 사용해서 위치 L0에서 기준 프레임의 자세가 결정된다. 이 예에서는 위치 L0에서 기준 프레임의 위치가 고정되지만, 위치 L0에서 기준 프레임의 배향은 조인트(110)가 움직임에 따라 변할 수 있다는 것을 유념한다. 조인트(110)의 타입에 따라서, 조인트가 움직임에 따라 위치 L0에서 기준 프레임의 위치 및 배향에 있어서 자유도가 상이하게 변한다. 하기 더 완전히 설명된 대로, 형상 센서(140)로부터 얻은 정보를 사용해서 프로세서가 적분을 수행한다. 적분에 의해 위치 L0에서의 기준 프레임 내에서 위치 L1에서의 프레임에 대한 자세 정보가 생성된다. 프로세서는 이 자세 정보와 위치 L0에서의 기준 프레임의 자세를 조합해서 위치 Lref에서의 고정된 보편 기준 프레임 내에서 위치 L1에서의 프레임에 대한 자세 정보를 생성할 수 있다.
유사하게, 위치 L0에서 위치 L2까지 형상 센서(140)로부터 얻은 정보를 적분하여 위치 L0에서의 기준 프레임 내에서 위치 L2에서의 프레임에 대한 자세 정보를 생성한다. 이것을 위치 L0에서의 기준 프레임의 자세와 조합해서 위치 Lref에서의 고정된 보편 기준 프레임 내에서 위치 L2에서의 프레임에 대한 자세 정보를 생성한다. 또한, 이 적분은 위치 Lref에서의 고정된 보편 기준 프레임 내에서 위치 L1과 L2 사이의 수술 기구(130)의 형상 정보를 제공한다.
이 예에서, 위치 L0에서 초기 위치(x0, y0, z0)가 고정되어 공지되고, 위치 Lref에서 고정된 보편 기준 프레임에 맵핑된다. 고정된 보편 기준 프레임 내의 초기 위치는 하기 더 완전히 설명된 예에서 오프셋 벡터  에서 사용된다(식 (17) 참조). 조인트 추적기(111)로부터의 측정값을 포함하는 고정된 보편 기준 프레임의 배향은 좌표계 행렬
에서 사용된다(식 (17) 참조). 조인트 추적기(111)로부터의 측정값을 포함하는 고정된 보편 기준 프레임의 배향은 좌표계 행렬  에 사용된다(식 (9) 참조).
에 사용된다(식 (9) 참조).
곡선 좌표 L0+S1에서, 즉 위치 L1에서 좌표(xn, yn, zn)를 얻기 위해 사용된 한 과정의 더 상세한 설명은 2008년 6월 30일 제출된 Giuseppe M . Prisco가 발명자인 동시에 양도된 동시 계류중인 미국 특허출원 공개 US 2009/0324161 A1, 발명 명칭 "FIBER OPTIC SHAPE SENSOR"에 설명된다.
형상 센서(140)는 조인트(110)와 조인트 추적기(111) 쪽의 근위에서 제자리에 고정된다(여기서, 원위는 조인트(110)와 조인트 추적기(111)로부터 떨어져서 수술 기구(130)를 향하고 있고, 근위는 반대 방향이다). 위치 L0는 전형적으로 조인트 추적기(111)에서 조인트(100)의 중심선에 있으며, 이로써 형상 센서(140)는 위치 L0로부터 제거된, 예를 들어 감지된 영역으로부터 제거된 위치에서 제자리에 고정된다.
형상 감지 광섬유를 제자리에 고정하기 위한 기술과 방법은 2008년 6월 30일 제출된 Theodore W. Rogers 및 Giuseppe Prisco가 발명자인 동시에 양도된 미국 특허출원 제12/164,297호, 발명 명칭 "FIXTURE FOR SHAPE-SENSING OPTICAL FIBER IN A KINEMATIC CHAIN"에 설명되며, 이것은 그 전체가 참고자료로 본원에 포함된다. 또한, 원격통신 산업에서 사용되는 광섬유에 서비스 루프를 생성하기 위한 종래의 기술이 사용될 수 있다.
한 양태에서, 형상 센서(140)는 형상 센서(140)가 수술 기구(130)로 들어간 위치 L1에 공지된 기하 형상과 같은 공지된 특징부를 가진다. 한 양태에서, 수술 기구(130)에서 형상 센서(140)의 원단부는 자유롭게 움직인다.
수술 기구(130)의 근위 진입 위치에서 형상 센서(140)에 공지된 특징부를 실시하기 위한 적합한 기술은 2009년 11월 13일 제출된 Giuseppe M. Prisco가 발명자인 동시에 양도된 미국 특허출원 제12/618000호, 발명 명칭 "FIBER OPTIC SHAPE SENSOR"에 설명되며, 이것은 그 전체가 참고자료로 본원에 포함된다. 또한, 2009년 11월 13일 제출된 Vincent Duindam 등이 발명자인 공동으로 양도된 미국 특허출원 제12/618,082호, 발명 명칭 "Method and System to Sense Relative Partial-Pose Information Using a Shape Sensor"를 참조하며, 이것은 그 전체가 본원에 참고자료로 포함된다.
한 양태에서, 위치 L1에 기하 중심을 가진 형상 센서(140)에서 공지된 특징부는 S-커브이다. 형상 센서(140)가 위치된 내강은 공지된 특징부를 제공할 수 있는 모양일 수 있거나, 또는 달리 형상 센서(140) 상에 클램프 또는 클램프들을 사용해서 공지된 특징부를 생성할 수 있다.
형상 센서(140)의 진입 지점에서 선택적으로 공지된 특징부가 사용된다. 또는 달리, 줄의 길이와 위치 L0에서 줄의 근단부까지 기준 고정부(115)에서 어떤 거리의 길이를 측정해서 위치 L1을 결정할 수 있다. 일부 용도에서, 위치 L1은 관심 대상이 아니다. 전형적으로, 가요성 수술 기구의 경우, 수술 기구의 원단부의 마지막 1/2 미터 내지는 1 미터의 형상과 수술 기구의 원단부의 자세가 관심의 대상이다.
형상 센서(140)가 다중-코어 형상 감지 광섬유인 양태에서는 꼬임이 측정된 형상 정보를 왜곡하기 때문에 형상 센서(140)가 줄(120)과 수술 기구(130) 안에서 꼬이지 않도록 주의해야 한다. 실제로 형상 센서에만 의존하여 3-차원 자세를 결정하는 일부 종래의 시스템에서는 꼬임의 존재가 부정확한 결과를 가져왔다.
한 양태에서, 형상 센서(140)의 꼬임(접선축을 중심으로 한 회전)은 줄(120)의 본체와 수술 기구(130)의 본체에 토션에 대해 강성인 재료를 사용함으로써 완화된다. 이 본체들을 위한 적합한 재료는 내시경 본체에 사용되는 재료들을 포함한다.
여기서 토션에 대해 강성인 본체는 정상 하중 및 정상 사용 상황에서 사용되는 동안 역치보다 적은 꼬임을 나타내는 본체이다. 역치는 수술 기구(130)를 사용하는 동안 의사를 귀찮게 하는 꼬임의 양인데, 형상 센서의 꼬임에 의해서 도입되는 측정 오차로 인해서 수술 기구(130)를 조작할 때 기구(130)의 시각 영상이 의사가 행하는 동작을 따르지 않기 때문이다. 실험은 대부분의 의사들이 꼬임의 ±10도의 역치를 수용할 수 있다는 것을 나타냈다.
형상 센서(140)의 어떤 꼬임을 더 제한하기 위해서, 토션에 대해 강성인 본체가 비-원형 단면을 가진 본체의 내강 및 동일한 비-원형 단면을 가진 형상 센서와 함께 사용될 수 있다. 이러한 단면은 내강 안에서 형상 센서가 꼬이는 것을 방지하며, 그래서 어떤 꼬임은 토션에 대해 강성인 본체에 의해 부여되는 것이다.
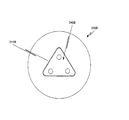
예를 들어, 도 2a에서 토션에 대해 강성인 본체(210A)는 비-원형 단면(211A)을 가지고, 형상 센서(240A)도 동일한 비-원형 단면을 가진다. 도 2b에서, 토션에 대해 강성인 본체(210B)는 둥근 삼각형 단면(211B)을 가진 내강을 가지고, 형상 센서(240B)도 동일한 둥근 삼각형 단면을 가진다.
도 2a 및 2b의 단면은 단지 예시일 뿐이며, 제한으로 사용되지 않는다. 형상 센서의 단면 형상을 알고 있을 때, 실질적으로 동일한 단면 형상을 가진 내강이 토션에 대해 강성인 줄 안에 형성될 수 있다. 예를 들어, 형상 센서의 단면이 D자 모양이면 줄의 내강의 단면도 D자 모양을 가질 것이다.
다른 양태에서, 형상 센서(140)의 꼬임이 저마찰 튜빙으로 형상 센서(140)를 감쌈으로써 완화되며, 이로써 형상 센서(140)는 튜빙의 내강 안에서 자유롭게 회전하고, 튜빙 안에서의 어떤 꼬임과 무관하게 역치 이상의 꼬임을 나타내지 않게 된다. 저마찰 튜빙은 줄의 내강과 수술 기구의 내강을 통해 지나간다.
예로서, 저마찰 튜빙은 플루오르화 폴리머로 제조된다. 플루오르화 폴리머의 한 예는 폴리테트라플루오로에틸렌(PTFE)이다.
또는 달리, 토션에 대해 강성인 본체가 이 토션에 대해 강성인 본체의 내강에 삽입된 저마찰 튜빙과 함께 사용될 수 있다. 토션에 대해 강성인 줄 본체가 사용되는지, 저마찰 튜빙이 줄의 내강에 사용되는지, 또는 이 둘의 조합이 사용되는지에 관계없이, 형상 센서는 실질적으로 꼬임 없이 유지된다. 여기서 실질적으로 꼬임이 없다는 것은 형상 센서의 꼬임이 토션에 대해 강성인 줄에 대해 상기 설명된 역치 미만인 것을 의미한다.
도 3은 기준 고정부(315)의 한 예의 투시 단면도이다. 기준 고정부(315)의 본체(350)는 제1 엣지면(352)에서 제2 엣지면(353)까지 본체(350)를 통해서 연장된 내강(351)을 가진다. 또한, 본체(350)는 제1 엣지면(352)에서 제2 엣지면(353)까지 본체(350) 안에서 연장된 복수의 나삿니형 스크류 홀을 포함한다. 도 3에서 복수의 나삿니형 스크류 홀의 나삿니형 스크류 홀(363-1, 363-3, 364-1, 364-3)을 볼 수 있다. 복수의 스크류 홀을 사용해서 롤 조인트(310)를 본체(350)에 부착한다.
롤 조인트(310)는 내강(351)에 장착된 제1 베어링(361) 및 제2 베어링(362)을 포함한다. 제1 및 제2 베어링(361, 362)은 내강(351)을 통해 지나가는 중공 로드(360)를 지지한다. 중공 로드(360)는 제1 엣지면(352)을 지나서 연장된다.
줄(320)은 제1 엣지면(352)을 지나서 연장된 중공 로드(360)의 단부에 클램프(321)에 의해 연결된다. 이로써 줄(320)의 근단부의 롤 동작이 로드(360)에 전달된다.
또, 중공 로드(360)는 제2 엣지면(352)을 지나서 연장되며, 중공 로드(360)에 고정된 롤 조인트 추적기(311)의 내강을 통해 지나간다. 이로써 줄(360)이 터닝함에 따라 롤 동작이 롤 조인트 추적기(311)에 전달되고, 롤 조인트 추적기(311)에 의해서 측정된다. 롤 조인트 추적기(311)는 종래의 선택적 조인트 추적기이며, 당업자에게 잘 알려져 있다.
선택적 조인트 추적기의 사용은 단지 예시일 뿐이며, 제한으로 사용되지 않는다. 조인트 또는 조인트들을 선택할 때 적절한 추적 메커니즘이 선택될 수 있다. 조인트가 자유도를 갖지 않는다면 조인트 추적기는 사용되지 않는다.
형상 센서(340)가 중공 로드(360)를 통해 지나가서 형상 센서(340)가 롤 조인트 추적기(311)에 인접한 로드(360)의 단부를 지난 후에 제자리에 고정된다. 형상 센서(340)는 상기 설명된 대로 제자리에 고정된다.
도 3의 예에서, 단일 자유도가 고정부(315)에 의해 제어된다. 다른 실시형태에서, 추가의 자유도가 기준 고정부에 의해 제어될 수 있으며, 이로써 수술 기구의 조작능이 개선된다.
고정된 보편 기준 프레임 내에서 3-차원 형상 및 자세 측정값을 얻을 수 있는 능력은 최소 침습 수술 과정에 이용될 수 있는 역량을 증진시킨다. 두 가지 예들이 고려된다. 제1 예에서는 최소 침습 원격조종 수술 시스템과 복강경 시스템이 함께 사용된다. 제2 예에서는 복강경 시스템만 고려된다.
제1 예는 캘리포니아 서니베일의 Intuitive Surgical, Inc.에 의해 제조된 da Vinci® 수술 시스템과 같은 종래의 최소 침습 원격조종 수술 시스템을 포함하며, 시스템이 자체적으로 지니고 있는 내부 시스템 지식을 이용한다. 제2 예는 복강경 배치 시스템에 의해서 직접 얻어지는 모든 정보를 수집하는 총합적 복강경 버전이다.
최소 침습 로봇 수술 시스템을 나타낸 제1 예에서, 시스템의 단지 일부만이 도 4a에 예시된다. 카트(405)가 복수의 조작기를 지지한다. 이 예에서는 내시경 카메라 조작기(406)가 예시된다.
내시경 카메라 조작기(406)에 장착된 기준 고정부(415)는 기준 고정부(415)가 복수의 줄에 연결된 것을 제외하면 기준 고정부(115)와 유사하며, 이 예에서 줄은 줄(421)과 줄(422)을 포함한다. 다시, 이 예에서, 위치 Lref에서 고정된 보편 기준 프레임은 환자(490) 위의 위치에 한정된다. 줄(421)을 통해 지나간 형상 센서에 대한 기준 프레임은 위치 L0-1에 한정되고, 줄(422)을 통해 지나간 형상 센서에 대한 기준 프레임은 위치 L0-2에 한정된다.
도 1과 관련하여 상기 설명된 것과 유사한 방식으로, 위치 L0-1에서 기준 프레임 내의 자세는 컨트롤러에(180)에 의해서 위치 Lref에서 고정된 보편 기준 프레임에 맵핑된다. 유사하게, 위치 L0-2에서 기준 프레임 내의 자세도 컨트롤러(180)에 의해서 위치 Lref에서 고정된 보편 기준 프레임에 맵핑된다.
이 예에서, 줄(421)을 통해 지나간 형상 센서는 줄(421)을 떠나 캐뉼라(431)에 진입한 후에 S-커브와 같은 공지된 특징부를 가진다. 유사하게, 줄(423)을 통해 지나간 형상 센서는 줄(422)을 떠나 캐뉼라(432)에 진입한 후에 공지된 특징부를 가진다. 캐뉼라(431, 432)는 특정 수술 기구의 예이다.
이 예에서, 기준 고정부(415)는 캐뉼라(431)에 연결된 줄(421)에 연결된 조인트의 동작을 추적하는 제1 조인트 추적기, 및 캐뉼라(432)에 연결된 줄(422)에 연결된 조인트의 동작을 추적하는 제2 조인트 추적기를 포함한다.
그러나, 일부 양태에서는 줄이 토션에 대해 강성이어도 기준 구조에 어떤 자유도를 가진 조인트를 제공하지 않아도 수술 기구의 조작능이 충분하다. 예를 들어, 캐뉼라는 1도 동작의 조인트가 필요하지 않은 토션에 대해 강성인 줄에 부착되었을 때 충분히 움직일 수 있다. 이 상황에서, 기준 구조의 조인트는 0의 자유도를 가지고, 조인트 추적기는 사용되지 않는다.
캐뉼라(431)에서 형상 센서의 공지된 특징부는 정보를 제공하며, 이 정보를 처리해서 위치 L3에서 캐뉼라(431)의 자세를 결정할 수 있다. 하기 더 완전히 설명된 대로, 형상 센서(140)로부터 얻은 정보의 적분이 위치 L0-1에서 위치 L3까지 수행되어 위치 L0-1에서의 기준 프레임 내에서 위치 L3에서의 프레임에 대한 자세 정보가 생성된다. 이것을 위치 L0-1에서 기준 프레임의 자세와 조합해서 위치 Lref에서의 고정된 보편 기준 프레임 내에서 위치 L3에서의 프레임에 대한 자세 정보를 생성한다. 이 과정은 도 1과 관련해서 상기 설명된 것과 동일하다. 동일한 과정을 사용해서 위치 Lref에서의 고정된 보편 기준 프레임 내에서 위치 L4에서의 캐뉼라(432)의 3-차원 자세를 얻는다.
기준 고정부(415)가 장착된 조작기에 대한 3-차원 자세 정보는 최소 침습 수술 시스템 내에 내부적으로 알려진다. 이로써 캐뉼라(431, 432)에 대해 고정된 보편 기준 프레임에 생성된 자세 정보가 조작기에 대한 기준 프레임에 맵핑될 수 있다.
줄로 이어진 캐뉼라(432)와 수술 기구(433) 사이에 제2 줄(423)을 추가함으로써 수동 삽입 수술 기구(433)(도 4b)의 삽입 깊이가 직접 측정된다. 형상 센서가 위치 L0-2를 통해서 줄(421)을 통해서 캐뉼라(432)까지 연장되고, 캐뉼라(432)로부터 줄(423)을 통해서 수술 기구(433)의 공지된 특징부까지 연장된다. 도 4b의 예에서, 위치 Lref에서 고정된 보편 기준 프레임 내의 위치 L5에서의 자세와 위치 Lref에서 고정된 보편 기준 프레임 내의 위치 L4에서의 자세를 사용해서 삽입 깊이를 결정한다. 두 위치에서 자세들 사이의 거리는 기구(433)가 삽입됨에 따라 감소한다.
최소 침습 원격조종 수술 결합형 시스템을 이용하는 시스템은 카메라에 대한 기준이 카메라 각도, 카메라 끝의 삽입 깊이 및 초점 깊이와 같은 시스템에 알려진 상황 변수를 사용할 수 있다는 점에서 상당한 이점을 가진다. 복강경 시스템에서만도 모든 변수가 직접 측정되어야 한다.
동일한 기준점까지 뒤로 연결된 줄에 의해서 캐뉼라 위치들을 전부 직접 측정해서 상기 설명된 것과 동일한 방식으로 카메라 캐뉼라와 관련해서 기구 캐뉼라의 벡터를 확립할 수 있다. 스코프 삽입 깊이는 상기 설명된 대로 추가의 줄을 사용해서 측정될 수 있다.
상기 설명된 대로, 한 양태에서, 형상 센서는 광섬유 브래그 격자를 가진 다중-코어 광섬유를 사용하여 실시된다. 한 예에서, 광섬유는 아래 더 완전히 설명된 대로 3개의 코어 광섬유이다. 다른 구체예에서, 다양한 수의 코어가 사용될 수 있다.
이 예에서, 호출기(170)가 광섬유를 호출하고, 광섬유로부터의 형상 정보를 컨트롤러(180)의 입력/출력 모듈(181)에 제공한다. 호출기(170)는 광 주파수 영역 반사파 측정법을 실시하며, 광섬유의 각 코어에 대해서 표준 광 후방산란 반사계를 이용한다.
형상 정보는 불연속 곡선 좌표 S(t)의 함수로서 분석된다. 컨트롤러(180)의 프로세서 모듈(182)의 프로세서가 메모리(183)에 저장된 형상 정보 처리 모듈(184)의 컴퓨터 명령을 실행한다. 프로세서는 위치 L0에서의 기준 프레임을 결정한다. 다음에, 프로세서는 위치 L0에서의 기준 프레임의 위치에서 위치 L1에서의 공지된 특징부의 기하 중심까지 적분을 수행한다. 한 양태에서, 공지된 특징부의 기하 중심 위치는 공지된 특징부를 표시하는 형상 신호의 중심을 발견함으로써 결정된다.
적분(하기 식 (15) 참조)은 위치 L1에서 공지된 특징부의 x-y-z 위치 및 배향을 생성하고, 차례로 이것을 사용해서 위치 Lref에서의 고정된 보편 기준 프레임에 대해 공지된 특징부의 기하 중심의 위치 및 각도를 결정할 수 있다.
곡선 좌표 L0+S1에서 좌표 (xn, yn, zn)를 얻기 위해서 사용된 한 과정의 더 상세한 설명은 동시에 양도된 동시 계류중인 미국 특허출원 공개 US 2009/0324161 A1에 설명되며, 이것은 그 전체가 본원에 참고자료로 포함된다.
도 5는 광섬유 코어(500)의 한 구성형태의 도식도이다. 동시에 양도된 동시 계류중인 미국 특허출원 공개 US 2009/0324161 A1에 다른 구성형태들도 예시된다.
도 5에서는 명료하게 하기 위해 둘러싼 외피와 섬유는 생략된다. 도시된 많은 수직선은 각각 각각의 인접한 광섬유 브래그 격자들을 나타낸다. 하기 설명된 대로, 각 코어는 단일 광섬유에서 3개 이상의 코어로 이루어진 하나의 코어이다.
도 5에 도시되고 상기 설명된 대로, 곡선 좌표계 S(t)는 섬유 및 그에 따른 코어(500)와 다른 코어들(미도시)에 대해서 한정된다. 일부 경우, 좌표계 S(t)의 원점의 위치 L0는 상기 설명된 대로 고정부(115)에 대해 한정된다.
일단 원점 위치 L0이 한정되면, 하나 이상의 형상 감지 구간이 코어를 따라 있는 위치들 사이에 한정된다. 코어에서 각 한정된 형상 감지 구간은 1개의 광섬유 브래그 격자의 일부, 또는 1개의 완전한 광섬유 브래그 격자, 또는 많은 인접한 광섬유 브래그 격자들을 함유한다. 도 5에 도시된 대로, 코어(500)는 그것의 전체 길이를 따라 한정된 광섬유 브래그 격자들을 가지며, 형상 감지 구간(518)이 코어의 원단부에 한정되고, 광섬유 브래그 격자가 형성된 코어에는 추가의 구간들은 한정되지 않는다. 형상 감지 구간은 위치 L9에서 시작해서 거리 S9만큼 연장된다.
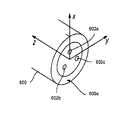
도 6은 예시적인 기준 프레임이 한정된 광섬유(600)의 근단부의 도식도이다. 도 6에 도시된 대로, 섬유(600)는 외피층(600a) 내에 3개의 광섬유 브래그 격자 형성 코어(602a, 602b, 602c)를 가진다. 각 코어(602a, 602b, 602c)는 광섬유(600)에 중심이 있는 정삼각형의 꼭지점에 위치된다.
도 6에 도시된 대로, 데카르트 기준 프레임이 광섬유(600)에 대해 한정된다. 이 데카르트 기준 프레임의 한 축은 코어 중 하나와 교차하고(예시로서 x-축이 코어(602a)와 교차하는 것으로 도시된다), 다른 축은 광섬유(600)의 중심선에 접선이다. 코어를 통해서 연장되도록 x-축을 한정함으로써 광섬유(600)의 중심선 주변으로 회전 기준이 제공된다. x-축의 정의는 임의적이며, 광섬유가 매립된 운동학적 사슬의 기하구조에 기초할 수 있다. 예를 들어, x-축은 광섬유가 매립되거나 결합된 운동학적 사슬의 한 조인트 축과 정렬될 수 있다.
도 6에 도시된 데카르트 기준 프레임(x, y, z)은 곡선 좌표계 S(t)의 원점과 일치하는 원점과 함께 정의되었을 때는 베이스 프레임으로서 기능한다. 데카르트 기준 프레임이 구간 시작 위치에서의 원점과 함께 정의되었을 때는 데카르트 기준 프레임이 형상 감지 구간 기준 프레임으로서 기능한다. 데카르트 기준 프레임은 구간 종료 위치에서도 유사하게 정의될 수 있다. 도 6에는 3개의 코어가 도시되지만, 다른 수의 코어도 사용될 수 있다(예를 들어, 평면 휨 측정을 위해서는 2개의 대향하는 코어, 섬유 꼬임을 측정하기 위해서는 4개의 코어 등).
도 7은 형상 감지에 사용된 광섬유에서 구간 시작점에서의 기준 프레임을 예시하는 도식도이다. 도 7은 광섬유(700)를 묘사하며, 한 구체예에서 이것은 도 6에 예시된 대로 3개의 코어를 갖도록 구성된다(4개의 코어 또는 다른 코어 구성형태도 사용될 수 있다). 2개의 형상 감지 구간이 광섬유(700)에 한정된다. 제1 구간(702a)은 곡선 기준 위치 L0(구간 시작)에서 곡선 기준 위치 L0+S1(구간 종료)까지 한정된다. 제2 구간(702b)은 곡선 기준 위치 L1(구간 시작)에서 곡선 기준 위치 L1+S2(구간 종료)까지 한정된다. 본 발명의 양태에 따라서, 제1 데카르트 기준 프레임(704a)이 구간 시작점 L0에서 한정된다. 기준 프레임(704a)의 z-축은 구간 시작점 L0에서 광섬유(700)의 중심선에 접선이다. 기준 프레임(704a)의 x-축은 도 6에서 설명되고 예시적으로 도시된 대로 코어들 중 하나를 통해서 지나간다. 유사하게, 제2 데카르트 기준 프레임(704b)이 구간 시작점 L1에서 한정되고, 이때 기준 프레임(704b)의 z-축은 구간 시작점 L1에서 광섬유(700)의 중심선에 접선이다. 기준 프레임(704b)의 x-축인 기준 프레임(704a)의 x-축과 동일한 코어를 통해서 지나간다.
도 8에 예시된 베이스 기준 프레임과 도 7에 예시된 2개의 구간 시작 기준 프레임은 상호 관련되며, 전체 3개는 동일한 코어(예를 들어, 코어(702a))를 통해서 한정된 하나의 법선축(예를 들어, x-축)을 가진다.
다음은 컨트롤러(180)의 전자 데이터 처리 유닛, 간단히 말하면 프로세서에 의해서 수행되는 계산을 예시한다. 당업자는 전자 데이터 처리 유닛을 구성하는데 있어서 많은 하드웨어, 펌웨어 및 소프트웨어 옵션이 존재하며, 필요한 계산의 실시가 본 설명에 비추어 통상적으로 이루어진다는 것을 이해할 것이다.
국소 변형응력 ε(s)는 주어진 섬유 코어를 따라 거리의 함수로서 작성된다:
상기 식에서, Δd는 지수 n 당 거리 증분이다. Δd 값은 OFDR-기반 호출기의 분해능에 따라서 설정된다. 예를 들어, 국소 변형응력 ε(s)는 각 코어에 대해 각 섬유 코어를 따라 거리의 함수로서 버지니아 로어노크 소재의 Luna Innovations Incorporated로부터 상업적으로 입수가능한 제품인 "광 후방산란 반사계"를 사용하여 얻어진다. 이러한 장치는 본원에 참고자료로 포함되는 광 후방산란 반사계 사용자 가이드 챕터 5-6, 33-60(Luna Technologies, Inc. 2004)(OBR 제어 소프트웨어 버전 0.42 베타의 문서 버전 1.0)에 나타낸 대로, 섬유 코어를 따라 거리의 함수로서 반사된 빛의 상 도함수를 출력할 수 있다. 이러한 상 도함수 정보는 식 (1)에서 소정의 국소 변형응력 ε(s)에 비례한다.
섭동이 미리 설정된 경우, 코어들 사이의 차등 변형응력이 필요하다. 3개의 코어에 대해서 필요한 차등 변형응력은 다음과 같다:

상기 식에서, Δε p 및 Δε q 는 2개의 차등 변형응력 어레이를 지정한다.
다음에, 이들 차등 변형응력이 간단한 선형 변환을 이용해서 정규 직교 좌표계에서 국소 휨으로 전환될 수 있다:

m-행렬  은 다중-코어 섬유를 충분히 설명하며, 좌표계에서 코어들의 위치 및 섬유의 초기 회전 배향의 효과를 포착한다.
은 다중-코어 섬유를 충분히 설명하며, 좌표계에서 코어들의 위치 및 섬유의 초기 회전 배향의 효과를 포착한다.
다음에, 이들 2개의 회전값을 사용하여, 하기 등식에 따라서 x-축을 중심으로 한 각도 θx,n의 제1 회전과 y-축을 중심으로 한 θy,n의 제2 회전의 곱과 동등한 회전 행렬을 생성한다:

소 각도 근사를 위해서 상기 식은 다음과 같이 단순화된다:

상기 식에서, 1차 소 각도 근사가 사용되기 때문에, θx << 1이고, θy << 1인 경우에만  이 유효 회전 행렬이 된다.
이 유효 회전 행렬이 된다.
충분히 작은 공간 증분이 사용될 경우 상기 조건을 만족시키는 것이 어렵다. 다음에, 이 회전 행렬이 섬유상의 n 번째 위치에 있는 좌표계로 이동된다. 이 방식에서, 계산을 반복함으로써 섬유의 길이를 따라 나아가면서 그 길을 따라서 접선 벡터와 회전 좌표계를 한정하는 벡터들을 재구성한다. 반복 등식은 다음과 같다:

또는, 소 각도 근사를 사용할 경우에는 다음과 같다:

이로써 어레이를 따라 어떤 위치에서도 좌표계는 다음과 같이 주어진다:

이 좌표계 행렬

의 초기값은 외부 좌표계에서 섬유의 초기 배향을 설명한다. 섬유가 처음에 z-축을 따라 정렬된다면, 이 행렬은 다음과 같이 될 것이다:

상기 설명에서, 처음 2개 벡터는 여전히 1의 자유도를 가지는데, 이것은 축을 중심으로 한 섬유의 회전이며, 상기 m-행렬에서의 동일한 회전 자유도이다. 많은 실시형태에서 이런 상황은 일반적으로 문제가 되지 않는데, 일반적으로 운동학적 사슬에 섬유가 매립되거나 결합되는 방식과 보정에 의해 자동으로 처리되기 때문이다. 또한, 이것은 초기 행렬이 다음과 같이 제한되는 경우에도 완전한 일반성이 보유될 수 있음을 의미한다:

접선 벡터  는
는  의 마지막 칼럼이다:
의 마지막 칼럼이다:

따라서, 어떤 특정 지점에서 접선 벡터는 앞선 회전 벡터들을 전부 곱한 값이다.

섬유를 따라 어떤 지점에서든 그 위치는 앞선 접선 벡터들 전부의 합계에 이들이 표시된 섬유의 길이를 곱한 값이다:

접선 벡터에 대한 식으로 치환하면 다음과 같이 된다:

일반성을 위해서, 임의의 오프셋 벡터를 추가함으로써 계산된 좌표들을 어떤 임의의 좌표계에 배치할 수 있다:

여기서,

및

이다.
구간의 종료점에서 기준이 되는 프레임의 위치 및 배향을 그 구간의 시작점에서 기준이 되는 프레임과 관련하여 계산하는 경우,  는 동일성 행렬이고,
는 동일성 행렬이고,  는 0의 벡터로서, 해당 구간의 시작점에서 기준이 되는 프레임을 나타낸다. 또는 달리, 상기 계산은 다른 베이스에서, 또는 예를 들어 운동학적 사슬의 베이스에 위치된 보편 프레임에서 수행될 수 있다. 이 경우,
는 0의 벡터로서, 해당 구간의 시작점에서 기준이 되는 프레임을 나타낸다. 또는 달리, 상기 계산은 다른 베이스에서, 또는 예를 들어 운동학적 사슬의 베이스에 위치된 보편 프레임에서 수행될 수 있다. 이 경우,  은 상기 언급된 베이스 프레임과 관련하여 해당 구간의 시작점에서 기준이 되는 프레임의 배향을 특정하는 3x3 행렬이고,
은 상기 언급된 베이스 프레임과 관련하여 해당 구간의 시작점에서 기준이 되는 프레임의 배향을 특정하는 3x3 행렬이고,  는 상기 언급된 베이스 프레임과 관련하여 시작 구간에서 기준이 되는 프레임의 원점의 위치를 특정하는 3x1 벡터이다.
는 상기 언급된 베이스 프레임과 관련하여 시작 구간에서 기준이 되는 프레임의 원점의 위치를 특정하는 3x1 벡터이다.
상기 언급된 대로, 일부 예에서, 양 Δd는 사용된 특정 간섭계의 특성으로부터 알게 된다. 또는 달리, Δd는, 예를 들어 고정부를 사용하여 해당 섬유 구간을 직선 라인에 배치하고, 등식 18로부터 계산된 구간 끝 위치와 해당 구간의 기지의 물리적 길이를 비교함으로써 보정될 수 있다.
본 발명의 양태 및 구체예들을 예시하는 상기 설명 및 첨부한 도면들은 보호된 본 발명을 한정하는 청구항들을 제한하는 것으로 해석되어서는 안 된다. 다양한 기계적, 조성적, 구조적, 전기적 및 작동적 변화가 상기 설명 및 청구항의 정신 및 범위로부터 벗어나지 않고 이루어질 수 있다. 일부 예에서, 본 발명이 모호해지는 것을 피하기 위해서 잘 공지된 회로, 구조 및 기술은 상세히 나타내거나 설명되지 않았다.
본원에서 사용된 광섬유 브래그 격자는 굴절률에서 공간적 주기성을 생성하기 위하여 코어의 굴절률을 연속적으로 조정하는 것을 포함한다. 이런 간격화는, 각 굴절률 변화로부터의 부분적 반사들이 좁은 대역의 파장에 간섭성 부가됨으로써 훨씬 더 넓은 대역을 통해 지나가는 동안에도 단지 이 좁은 대역의 파장만을 반사하도록 선택될 수 있다. 광섬유 브래그 격자를 제작하는 과정에서 이런 조정은 기지의 거리만큼 간격화되며, 이로써 기지의 파장 대역에서 반사가 일어난다. 그러나, 섬유 코어에 변형응력이 유도된 경우, 조정 간격은 코어의 변형응력의 양에 따라서 변할 것이다.
또한, 본 명세서의 용어는 본 발명을 제한하는 의도가 아니다. 예를 들어, "밑", "아래", "하부", "위", "상부", "부근", "원위" 등과 같은 공간적인 상대적 용어들은 도면에 예시된 한 요소 또는 특징부의 다른 요소 또는 특징부와의 관계를 설명하기 위해서 사용될 수 있다. 이러한 공간적인 상대적 용어들은 도면에 도시된 위치 및 배향에 더하여 사용중인 또는 작동중인 장치의 상이한 위치(즉, 위치) 및 배향(즉, 회전가능한 배치)을 포괄하도록 의도된다. 예를 들어, 도면의 장치가 반전된다면, 다른 요소 또는 특징부의 "아래" 또는 "밑"이라고 설명된 요소가 다른 요소 또는 특징부의 "위" 또는 "바로 위"가 된다. 따라서, 예시적인 용어 "아래"는 위와 아래의 위치와 배향을 둘 다 포괄할 수 있다. 장치는 다른 식으로 배향될 수 있고(90도 회전되거나, 또는 다른 배향으로), 본원에서 사용된 공간적으로 상대적 설명은 그에 따라서 해석된다. 마찬가지로, 다양한 축을 따른 이동 및 축 주위에서의 움직임에 대한 설명도 역시 다양한 특별한 장치 위치 및 배향을 포함한다.
또한, 단수형 "한" 및 "그"는 문맥상 다른 의미가 아니라면 복수 형태도 포함하도록 의도된다. 그리고, 용어 "포함한다", "포함하는", "포함한다" 등은 언급된 특징부, 단계, 작업, 요소 및/또는 구성요소의 존재를 명시하지만, 하나 이상의 다른 특징부, 단계, 작업, 요소, 구성요소 및/또는 군의 존재 또는 부가를 배제하지 않는다. 짝을 이루어 설명된 구성요소들은 전기적으로 또는 기계적으로 직접 연결될 수 있거나, 또는 이들은 하나 이상의 중간 구성요소를 통해 간접적으로 연결될 수 있다.
기계 구조 또는 구성요소와 관련하여 사용된 용어 "가요성"은 광범하게 해석되어야 한다. 본래 이 용어는 손상 없이 휠 수 있는 구조나 구성요소를 의미한다. 예를 들어, 가요성 기계 구조는 뱀 모양 구조에서의 "척추"와 유사한 일련의 밀접히 위치된 구성요소들을 포함할 수 있다. 이러한 구조에서 각 구성요소는 운동학적 사슬에 있는 짧은 링크이며, 각 링크 사이의 움직이는 기계적 구속장치(예를 들어, 핀 힌지, 컵/볼 등)가 링크들 사이의 상대적 운동에 1(예를 들어, 피치) 또는 2(예를 들어, 피치와 요우)의 자유도(DOF)를 허용할 수 있다. 다른 예로서, 가요성 기계 구조는 휠 수 있는 클로즈드 튜브(예를 들어, 니티놀, 폴리머 등) 또는 다른 휠 수 있는 피스(예를 들어, 커프-컷 튜브, 나선 코일 등) 등의 연속형일 수 있다. 따라서, 짧은 가요성 구조는 운동학적 사슬의 2개 링크 사이에 1 이상의 DOF를 제공하는 단일 기계적 구속장치(조인트)로서 모형화되어 사용될 수 있으며, 구조 자체가 몇 개의 연결된 링크로 이루어진 운동학적 사슬일 수도 있다.
도 1에서는 메모리가 일체화된 구조로서 예시되지만, 이것은 모든 메모리가 동일한 물리적 위치에 있을 필요가 있다는 것으로서 해석되어서는 안 된다. 전체 메모리 또는 일부 메모리는 프로세서와 상이한 물리적 위치에 있을 수 있다. 메모리는 휘발성 메모리, 비휘발성 메모리, 또는 이 둘의 어떤 조합을 말한다.
프로세서는 프로세서에 의해 실행되는 명령을 담은 메모리에 연결된다. 이것은 컴퓨터 시스템 내에서 달성되거나, 또는 모뎀과 아날로그 라인, 또는 디지털 인터페이스와 디지털 전송선을 통한 다른 컴퓨터와의 접속을 통해 달성될 수 있다.
여기서, 컴퓨터 프로그램 제품은 핸드 트래킹과 관련해서 설명된 과정들 중 어느 하나 또는 어떤 조합에 필요한 컴퓨터 판독가능한 코드를 저장하도록 구성된 매체, 또는 핸드 트래킹과 관련해서 설명된 과정들 중 어느 하나 또는 어떤 조합을 위한 컴퓨터 판독가능한 코드가 저장된 매체를 포함한다. 컴퓨터 프로그램 제품의 일부 예들은 CD-ROM 디스크, DVD 디스크, 플래시 메모리, ROM 카드, 플로피 디스크, 자기 테이프, 컴퓨터 하드 드라이브, 네트워크상의 서버 및 컴퓨터 판독가능한 프로그램 코드를 표시하는 네트워크를 통해 송신되는 신호들이다. 비-일시적 유형 컴퓨터 프로그램 제품은 다양한 컨트롤러와 관련해서 설명된 과정들 중 어느 하나 또는 어떤 조합을 위한 컴퓨터 판독가능한 명령을 저장하도록 구성된, 또는 다양한 컨트롤러와 관련해서 설명된 과정들 중 어느 하나 또는 어떤 조합을 위한 컴퓨터 판독가능한 명령이 저장된 비-일시적 유형 매체를 포함한다. 비-일시적 유형 컴퓨터 프로그램 제품은 CD-ROM 디스크, DVD 디스크, 플래시 메모리, ROM 카드, 플로피 디스크, 자기 테이프, 컴퓨터 하드 드라이브 및 다른 비-일시적 물리적 저장 매체이다.
본 명세서의 관점에서, 형상 정보 처리 모듈과 관련하여 설명된 작업들 중 어느 하나, 또는 어떤 조합에서 사용된 지시는 사용자에게 관심 있는 작동 시스템 및 컴퓨터 프로그래밍 언어를 사용하여 광범한 컴퓨터 시스템 구성형태에서 실시될 수 있다.
모든 실시예 및 예시적인 언급은 비제한적이며, 본원에 설명된 특정 실시형태 및 구체예들과 이들의 등가물에만 청구항을 한정하는데 사용되어서는 안 된다. 표제는 단지 형식적인 것으로서, 어떤 식으로도 주제를 제한해서는 안 되며, 한 표제 아래의 내용은 하나 이상의 표제 아래의 내용에도 적용되거나, 서로 상호 언급될 수 있다. 마지막으로, 본 명세서의 관점에서 한 양태 또는 구체예와 관련하여 설명된 특정한 특징들은 도면에 구체적으로 도시되거나 내용에 설명되지 않았더라도 본 발명에서 개시된 다른 양태들 또는 구체예들에도 적용될 수 있다.
Claims (17)
- 고정된 보편 기준 프레임에서 제1 위치에 장착되는 기준 고정부로서, 상기 기준 고정부는 적어도 1의 자유도를 가지는 조인트 및 상기 조인트의 동작을 추적하는 조인트 추적기를 포함하는 기준 고정부;
근단부 및 근단부에 있는 캐뉼라 개구부를 가지는 캐뉼라;
상기 기준 고정부를 통해 연장되고 제1 부분 및 근단부를 포함하는 형상 센서로서, 상기 형상 센서의 제1 부분은 상기 캐뉼라의 근단부에 연결되고 상기 형상 센서의 근단부는 상기 기준 고정부를 지나 끝나는 형상 센서;
상기 형상 센서 위에서 상기 기준 고정부, 및 상기 캐뉼라의 근단부 사이에서 연장되는 제1 줄 바디;를 포함하고,
상기 조인트 추적기로부터의 정보는 상기 형상 센서로부터의 정보와 결합되어 상기 고정된 보편 기준 프레임에 대한 3-차원 정보를 생성하기 위해 사용되는 장치. - 제 1 항에 있어서, 상기 형상 센서의 제1 부분은 상기 형상 센서의 원단부인 것을 특징으로 하는 장치.
- 제 1 항에 있어서, 상기 형상 센서로부터의 정보는 상기 캐뉼라의 근단부에 대한 3-차원 자세 정보를 생성하기 위해 사용되는 것을 특징으로 하는 장치.
- 제 1 항에 있어서, 상기 캐뉼라를 통한 삽입을 위한 크기를 가지는 수술 기구를 더 포함하고, 상기 형상 센서는 상기 수술 기구의 제1 부분에 연결되는 원단부를 포함하고 상기 형상 센서의 제1 부분은 상기 형상 센서의 원단부 및 근단부 사이에 있는 것을 특징으로 하는 장치.
- 제 4 항에 있어서, 상기 형상 센서로부터의 정보는 상기 수술 기구의 제1 부분에 대한 3-차원 자세 정보를 생성하기 위해 사용되는 것을 특징으로 하는 장치.
- 제 4 항에 있어서, 상기 형상 센서 위에서 상기 캐뉼라의 근단부 및 상기 수술 기구 사이에서 연장되는 제2 줄 바디를 더 포함하는 것을 특징으로 하는 장치.
- 제 1 항에 있어서, 상기 고정된 보편 기준 프레임 내에 위치되는 제2 캐뉼라로서, 근단부 및 근단부에 있는 제2 캐뉼라 개구부를 가지는 제2 캐뉼라; 및
상기 기준 고정부를 통해 연장되는 제2 형상 센서로서, 원단부 및 근단부를 포함하는 제2 형상 센서를 더 포함하고,
상기 제2 형상 센서의 원단부는 상기 제2 캐뉼라의 근단부에 연결되고 상기 제2 형상 센서의 근단부는 상기 기준 고정부의 근단부에서 끝나는 것을 특징으로 하는 장치. - 제 1 항에 있어서, 상기 기준 고정부는 원격조종 수술 시스템의 조작기에 연결되고 상기 고정된 보편 기준 프레임에서 상기 조작기와 함께 움직일 수 있는 것을 특징으로 하는 장치.
- 제 1 항에 있어서, 상기 제1 줄 바디는 토션에 대해 강성인 재료로 형성되는 것을 특징으로 하는 장치.
- 제 1 항에 있어서, 상기 형상 센서는 상기 제1 줄 바디 내에서 상기 형상 센서의 회전을 방지하는 비원형 단면을 가지는 것을 특징으로 하는 장치.
- 제 1 항에 있어서, 상기 제1 줄 바디를 통해 연장되는, 라이너를 가지는 내강을 더 포함하고, 상기 형상 센서는 상기 라이너를 가지는 내강을 통해 연장되고,
상기 라이너를 가지는 내강은 상기 형상 센서가 라이너를 가지는 내강 내에서 자유롭게 회전하는 것을 허용하는 재료로 라이너가 형성되는 것을 특징으로 하는 장치. - 제 1 항에 있어서, 상기 형상 센서의 근단부는 센서 호출기에서의 상기 기준 고정부의 근단부에서 끝나는 것을 특징으로 하는 장치.
- 제 1 항에 있어서, 공지된 기하학적 형상은 기하학적 중심을 가지고, 기하학적 중심은 상기 형상 센서가 상기 캐뉼라의 근단부에서 상기 캐뉼라 개구부에 진입하는 곳에 위치되는 것을 특징으로 하는 장치.
- 고정된 보편 기준 프레임에서 제1 위치에 장착되는 기준 고정부로서, 상기 기준 고정부는 적어도 1의 자유도를 가지는 조인트 및 상기 조인트의 동작을 추적하는 조인트 추적기를 포함하는 기준 고정부;
근단부 및 근단부에 있는 캐뉼라 개구부를 가지는 캐뉼라;
상기 캐뉼라를 통한 삽입을 위한 크기를 가지는 수술 기구;
상기 기준 고정부를 통해 연장되고 제1 부분, 근단부 및 원단부를 포함하는 형상 센서로서, 상기 형상 센서의 제1 부분은 상기 캐뉼라의 근단부에 연결되고 상기 형상 센서의 근단부는 상기 기준 고정부를 지나 끝나고, 상기 원단부는 상기 수술 기구의 제1 부분에 연결되고 상기 형상 센서의 제1 부분은 상기 형상 센서의 원단부 및 근단부 사이에 있는 형상 센서;
상기 형상 센서 위에서 상기 기준 고정부, 및 상기 캐뉼라의 근단부 사이에서 연장되는 제1 줄 바디;를 포함하고,
상기 조인트 추적기로부터의 정보는 상기 형상 센서로부터의 정보와 결합되어 상기 고정된 보편 기준 프레임에 대한 3-차원 정보를 생성하기 위해 사용되는 장치. - 제 14 항에 있어서, 상기 형상 센서로부터의 정보는 상기 수술 기구의 제1 부분에 대한 3-차원 자세 정보를 생성하기 위해 사용되는 것을 특징으로 하는 장치.
- 제 15 항에 있어서, 상기 형상 센서 위에서 상기 캐뉼라의 근단부 및 상기 수술 기구 사이에서 연장되는 제2 줄 바디를 더 포함하는 것을 특징으로 하는 장치.
- 제 15 항에 있어서, 상기 형상 센서로부터의 정보는 상기 수술 기구의 삽입 깊이를 측정하기 위해 사용되는 것을 특징으로 하는 장치.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US30409410P | 2010-02-12 | 2010-02-12 | |
| US61/304,094 | 2010-02-12 | ||
| US12/839,642 | 2010-07-20 | ||
| US12/839,642 US9285246B2 (en) | 2010-02-12 | 2010-07-20 | Method and system for absolute three-dimensional measurements using a twist-insensitive shape sensor |
| PCT/US2011/022823 WO2011100124A1 (en) | 2010-02-12 | 2011-01-28 | Method and system for absolute three-dimensional measurements using a twist-insensitive shape sensor |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177029839A Division KR101868081B1 (ko) | 2010-02-12 | 2011-01-28 | 꼬임-비민감성 형상 센서를 사용하여 절대적 3-차원 측정을 위한 방법 및 시스템 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020197004564A Division KR102055636B1 (ko) | 2010-02-12 | 2011-01-28 | 꼬임-비민감성 형상 센서를 사용하여 절대적 3-차원 측정을 위한 방법 및 시스템 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20180069090A true KR20180069090A (ko) | 2018-06-22 |
Family
ID=43859687
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020187016375A KR20180069090A (ko) | 2010-02-12 | 2011-01-28 | 꼬임-비민감성 형상 센서를 사용하여 절대적 3-차원 측정을 위한 방법 및 시스템 |
| KR1020177029839A KR101868081B1 (ko) | 2010-02-12 | 2011-01-28 | 꼬임-비민감성 형상 센서를 사용하여 절대적 3-차원 측정을 위한 방법 및 시스템 |
| KR1020197004564A KR102055636B1 (ko) | 2010-02-12 | 2011-01-28 | 꼬임-비민감성 형상 센서를 사용하여 절대적 3-차원 측정을 위한 방법 및 시스템 |
| KR1020127020697A KR101789542B1 (ko) | 2010-02-12 | 2011-01-28 | 꼬임-비민감성 형상 센서를 사용하여 절대적 3-차원 측정을 위한 방법 및 시스템 |
Family Applications After (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177029839A KR101868081B1 (ko) | 2010-02-12 | 2011-01-28 | 꼬임-비민감성 형상 센서를 사용하여 절대적 3-차원 측정을 위한 방법 및 시스템 |
| KR1020197004564A KR102055636B1 (ko) | 2010-02-12 | 2011-01-28 | 꼬임-비민감성 형상 센서를 사용하여 절대적 3-차원 측정을 위한 방법 및 시스템 |
| KR1020127020697A KR101789542B1 (ko) | 2010-02-12 | 2011-01-28 | 꼬임-비민감성 형상 센서를 사용하여 절대적 3-차원 측정을 위한 방법 및 시스템 |
Country Status (6)
| Country | Link |
|---|---|
| US (6) | US9285246B2 (ko) |
| EP (2) | EP3339799B1 (ko) |
| JP (6) | JP5826770B2 (ko) |
| KR (4) | KR20180069090A (ko) |
| CN (2) | CN105496557B (ko) |
| WO (1) | WO2011100124A1 (ko) |
Families Citing this family (61)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8773650B2 (en) | 2009-09-18 | 2014-07-08 | Intuitive Surgical Operations, Inc. | Optical position and/or shape sensing |
| US9285246B2 (en) | 2010-02-12 | 2016-03-15 | Intuitive Surgical Operations, Inc. | Method and system for absolute three-dimensional measurements using a twist-insensitive shape sensor |
| EP2577221B1 (en) | 2010-06-01 | 2019-04-24 | Intuitive Surgical Operations Inc. | Interferometric measurement with crosstalk suppression |
| WO2012046202A1 (en) * | 2010-10-08 | 2012-04-12 | Koninklijke Philips Electronics N.V. | Flexible tether with integrated sensors for dynamic instrument tracking |
| CN103347460B (zh) * | 2011-01-27 | 2017-04-19 | 皇家飞利浦电子股份有限公司 | 介入环境内光纤形状感测的集成 |
| JP6491476B2 (ja) * | 2011-09-13 | 2019-03-27 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | ロボットとイメージとの間の自動オンライン・レジストレーション及びその方法 |
| MX2014004783A (es) * | 2011-10-26 | 2014-05-14 | Koninkl Philips Nv | Soporte de herramienta inteligente para una fibra optica de deteccion de forma. |
| RU2014127125A (ru) * | 2011-12-03 | 2016-01-27 | Конинклейке Филипс Н.В. | Определение местоположения точки введения хирургического инструмента |
| JPWO2013141112A1 (ja) * | 2012-03-23 | 2015-08-03 | 住友電気工業株式会社 | 干渉測定装置 |
| US9429696B2 (en) | 2012-06-25 | 2016-08-30 | Intuitive Surgical Operations, Inc. | Systems and methods for reducing measurement error in optical fiber shape sensors |
| JP6255394B2 (ja) | 2012-07-09 | 2017-12-27 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 適応的な画像によりガイドされた介入のための方法及びシステム |
| JP6373269B2 (ja) * | 2012-09-28 | 2018-08-15 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 光学形状検出のための最適ファイバ統合のための内腔設計 |
| WO2014053934A1 (en) * | 2012-10-01 | 2014-04-10 | Koninklijke Philips N.V. | System and method for registering shape sensing with imaging using an optimal plane |
| US9057600B2 (en) * | 2013-03-13 | 2015-06-16 | Hansen Medical, Inc. | Reducing incremental measurement sensor error |
| CN105120789B (zh) * | 2013-03-26 | 2019-12-31 | 皇家飞利浦有限公司 | 对光学形状感测使能仪器使扭曲最小化的系统和方法 |
| WO2014170782A1 (en) * | 2013-04-18 | 2014-10-23 | Koninklijke Philips N.V. | Optimal lumen design for optical shape sensing device |
| US9592095B2 (en) | 2013-05-16 | 2017-03-14 | Intuitive Surgical Operations, Inc. | Systems and methods for robotic medical system integration with external imaging |
| JP6270347B2 (ja) * | 2013-06-07 | 2018-01-31 | オリンパス株式会社 | 形状センサ |
| EP3027138A4 (en) * | 2013-07-29 | 2017-07-05 | Intuitive Surgical Operations, Inc. | Shape sensor systems with redundant sensing |
| US9925012B2 (en) * | 2013-09-04 | 2018-03-27 | Koninklijke Philips N.V. | Robotic system |
| EP3043738B1 (en) * | 2013-09-12 | 2019-12-11 | Intuitive Surgical Operations, Inc. | Shape sensor systems for localizing movable targets |
| JP2016534843A (ja) | 2013-09-30 | 2016-11-10 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 光学形状センシング使用可能デバイスにおけるファイバねじれを最小化するためのシステム及び方法 |
| US11432880B2 (en) | 2013-09-30 | 2022-09-06 | Koninklijke Philips N.V. | Docking device for optical shape sensing launch fixtures |
| WO2015044814A1 (en) * | 2013-09-30 | 2015-04-02 | Koninklijke Philips N.V. | Launch fixture for optical shape sensing |
| JP6446440B2 (ja) * | 2013-09-30 | 2018-12-26 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 光学形状検出のための多目的内腔計画 |
| JP2016020865A (ja) * | 2014-07-15 | 2016-02-04 | 古河電気工業株式会社 | 光ファイバを用いた応力分布測定方法および応力分布測定装置 |
| KR102531361B1 (ko) * | 2014-09-09 | 2023-05-12 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 상이한 가요성의 안내부 및 도구를 구비한 시스템 |
| JP2017537666A (ja) * | 2014-09-30 | 2017-12-21 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 光形状感知ファイバを用いたトリガ |
| US10376134B2 (en) * | 2014-10-17 | 2019-08-13 | Intutitive Surgical Operations, Inc. | Systems and methods for reducing measurement error using optical fiber shape sensors |
| EP3226772B1 (en) * | 2014-12-02 | 2022-10-19 | Koninklijke Philips N.V. | Automatic tracking and registration of ultrasound probe using optical shape sensing without tip fixation |
| EP3037056B1 (en) | 2014-12-23 | 2021-04-21 | Stryker European Holdings I, LLC | System for reconstructing a trajectory of an optical fiber |
| JP6799535B2 (ja) | 2015-03-27 | 2020-12-16 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 接続されるべきマルチコア光ファイバの干渉法整列 |
| EP3280312A4 (en) * | 2015-04-06 | 2019-02-20 | Intuitive Surgical Operations Inc. | SYSTEMS AND METHOD FOR REGISTERING COMPENSATION IN IMAGED SURGERY |
| JP2018527041A (ja) * | 2015-06-15 | 2018-09-20 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 後方散乱反射光測定を用いて医療デバイスの位置及び/又は形状を感知するための光学的形状感知システム並びに方法 |
| JP6790000B2 (ja) * | 2015-06-30 | 2020-11-25 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | X線透視外科手術ナビゲーションのための光ファイバリアルシェイプ感知 |
| US9498300B1 (en) * | 2015-07-30 | 2016-11-22 | Novartis Ag | Communication system for surgical devices |
| KR102457724B1 (ko) * | 2015-09-22 | 2022-10-24 | 삼성전자주식회사 | 영상 처리를 수행하기 위한 방법 및 그 전자 장치 |
| EP3355779A1 (en) * | 2015-10-02 | 2018-08-08 | Koninklijke Philips N.V. | Hub for device placement with optical shape sensed guidewire |
| WO2017055620A1 (en) * | 2015-10-02 | 2017-04-06 | Koninklijke Philips N.V. | Hub for device navigation with optical shape sensed guidewire |
| WO2017114837A1 (en) * | 2015-12-28 | 2017-07-06 | Koninklijke Philips N.V. | Elongated interventional device for optical shape sensing |
| EP3397183B1 (en) * | 2015-12-29 | 2022-10-19 | Koninklijke Philips N.V. | Registration system for medical navigation and method of operation thereof |
| WO2017119112A1 (ja) * | 2016-01-08 | 2017-07-13 | オリンパス株式会社 | マニピュレータシステムとその駆動方法 |
| CN113729977A (zh) * | 2016-02-12 | 2021-12-03 | 直观外科手术操作公司 | 用于在图像引导手术中使用配准荧光透视图像的系统和方法 |
| US11478150B2 (en) * | 2016-03-28 | 2022-10-25 | Becton, Dickinson And Company | Optical fiber sensor |
| WO2018064566A1 (en) | 2016-09-30 | 2018-04-05 | Intuitive Surgical Operations, Inc. | Systems and methods for entry point localization |
| WO2018122946A1 (ja) * | 2016-12-27 | 2018-07-05 | オリンパス株式会社 | 医療用マニピュレータの形状取得方法および制御方法 |
| JP7383608B2 (ja) * | 2017-11-13 | 2023-11-20 | コーニンクレッカ フィリップス エヌ ヴェ | 解剖学的構造介入用の多段ロボット |
| US10786311B2 (en) * | 2017-12-22 | 2020-09-29 | Acclarent, Inc. | Apparatus and method for registering facial landmarks for surgical navigation system |
| US11007027B2 (en) | 2018-03-07 | 2021-05-18 | Verb Surgical Inc. | Surgical robotic user input apparatus having optical fiber-based intrinsic sensors |
| CN108577977B (zh) * | 2018-03-19 | 2020-10-30 | 山东大学 | 穿刺针及穿刺针运动轨迹的三维重建方法及系统 |
| KR102226914B1 (ko) * | 2019-10-31 | 2021-03-11 | (주)옵토닉스 | 3차원 곡선 형상을 측정하기 위한 특수 광섬유 및 그의 제조 방법 |
| WO2021086129A1 (ko) * | 2019-10-31 | 2021-05-06 | (주)옵토닉스 | 3차원 곡선 형상을 측정하기 위한 특수 광섬유 및 그의 제조 방법, 그리고 특수 광섬유를 이용하여 3차원 곡선 형상을 측정하는 시스템 |
| KR102248064B1 (ko) * | 2019-10-31 | 2021-05-04 | (주)옵토닉스 | 특수 광섬유를 이용하여 3차원 곡선 형상을 측정하는 시스템 |
| US11087557B1 (en) * | 2020-06-03 | 2021-08-10 | Tovy Kamine | Methods and systems for remote augmented reality communication for guided surgery |
| CN113926050A (zh) * | 2020-06-29 | 2022-01-14 | 巴德阿克塞斯系统股份有限公司 | 用于光纤的自动尺寸参考系 |
| US11730926B2 (en) | 2020-08-31 | 2023-08-22 | Avent, Inc. | System and method for detecting medical device location and orientation in relation to patient anatomy |
| CN112826424A (zh) * | 2021-02-25 | 2021-05-25 | 嘉兴学院 | 一种具有姿态感应功能的医用内窥镜结构及其使用方法 |
| CN113483794B (zh) * | 2021-09-08 | 2021-11-09 | 西北工业大学 | 便于监测调节角度和长度的f-p传感器制备装置 |
| WO2024091387A1 (en) * | 2022-10-24 | 2024-05-02 | Verily Life Sciences Llc | Systems and methods for endoscopic navigation and bookmarking |
| CN115420314B (zh) * | 2022-11-03 | 2023-03-24 | 之江实验室 | 一种基于布拉格光栅位姿传感的电子内窥镜测控系统 |
| CN116250917B (zh) * | 2022-11-25 | 2023-12-19 | 哈尔滨工业大学 | 一种柔性前列腺手术器械 |
Family Cites Families (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DK138564B (da) * | 1976-11-09 | 1978-09-25 | Nordiske Kabel Traad | Fremgangsmåde ved fremstilling af et lysledende element til anbringelse i et rørformet hylster. |
| US4373779A (en) * | 1980-11-07 | 1983-02-15 | Litton Systems, Inc. | Single channel optical slip ring |
| US5353798A (en) * | 1991-03-13 | 1994-10-11 | Scimed Life Systems, Incorporated | Intravascular imaging apparatus and methods for use and manufacture |
| US5798521A (en) | 1996-02-27 | 1998-08-25 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Apparatus and method for measuring strain in bragg gratings |
| GB9713018D0 (en) | 1997-06-20 | 1997-08-27 | Secr Defence | Optical fibre bend sensor |
| WO2001013060A1 (en) * | 1999-08-13 | 2001-02-22 | Advanced Sensor Technologies Llc | Probe position sensing system for use in a coordinate measuring machine |
| GB2371361A (en) | 1999-10-29 | 2002-07-24 | Advanced Sensor Technology Llc | Optical fiber navigation system |
| JP4454747B2 (ja) * | 1999-12-21 | 2010-04-21 | オリンパス株式会社 | 内視鏡挿入形状検出装置 |
| JP2001275931A (ja) * | 2000-04-03 | 2001-10-09 | Olympus Optical Co Ltd | 医療システム |
| JP2004251779A (ja) * | 2003-02-20 | 2004-09-09 | Fuji Photo Optical Co Ltd | 長尺可撓部材の三次元形状検出装置 |
| US8882657B2 (en) | 2003-03-07 | 2014-11-11 | Intuitive Surgical Operations, Inc. | Instrument having radio frequency identification systems and methods for use |
| WO2005084542A1 (en) | 2004-03-04 | 2005-09-15 | Agency For Science, Technology And Research | Apparatus for medical and/or simulation procedures |
| US7781724B2 (en) * | 2004-07-16 | 2010-08-24 | Luna Innovations Incorporated | Fiber optic position and shape sensing device and method relating thereto |
| US7772541B2 (en) | 2004-07-16 | 2010-08-10 | Luna Innnovations Incorporated | Fiber optic position and/or shape sensing based on rayleigh scatter |
| US20060013523A1 (en) | 2004-07-16 | 2006-01-19 | Luna Innovations Incorporated | Fiber optic position and shape sensing device and method relating thereto |
| JP2007025761A (ja) * | 2005-07-12 | 2007-02-01 | Sri Sports Ltd | ゴルフクラブヘッドの設計方法およびゴルフクラブヘッド |
| US7930065B2 (en) | 2005-12-30 | 2011-04-19 | Intuitive Surgical Operations, Inc. | Robotic surgery system including position sensors using fiber bragg gratings |
| US9962066B2 (en) | 2005-12-30 | 2018-05-08 | Intuitive Surgical Operations, Inc. | Methods and apparatus to shape flexible entry guides for minimally invasive surgery |
| EP1990253B1 (en) * | 2006-03-02 | 2019-06-12 | NSK Ltd. | Torque sensor |
| US8419717B2 (en) * | 2006-06-13 | 2013-04-16 | Intuitive Surgical Operations, Inc. | Control system configured to compensate for non-ideal actuator-to-joint linkage characteristics in a medical robotic system |
| JP5373632B2 (ja) * | 2007-01-29 | 2013-12-18 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 侵襲を最小限にする外科システム及び該システムの作動方法 |
| JP5136747B2 (ja) | 2007-02-01 | 2013-02-06 | 国立大学法人 名古屋工業大学 | 曲がり度合い検出装置およびそれを用いた曲がり度合い検出方法 |
| US8146874B2 (en) | 2007-02-02 | 2012-04-03 | Hansen Medical, Inc. | Mounting support assembly for suspending a medical instrument driver above an operating table |
| EP2626006B1 (en) | 2007-08-14 | 2019-10-09 | Koninklijke Philips N.V. | Robotic instrument systems utilizing optical fiber sensors |
| US20090192355A1 (en) * | 2008-01-28 | 2009-07-30 | Mauricio Mejia | Scope for managing difficult pathways and method to improve visibility of the same |
| US7815376B2 (en) | 2008-06-30 | 2010-10-19 | Intuitive Surgical Operations, Inc. | Fixture for shape-sensing optical fiber in a kinematic chain |
| US7720322B2 (en) | 2008-06-30 | 2010-05-18 | Intuitive Surgical, Inc. | Fiber optic shape sensor |
| US20100030063A1 (en) * | 2008-07-31 | 2010-02-04 | Medtronic, Inc. | System and method for tracking an instrument |
| US8488130B2 (en) | 2009-11-13 | 2013-07-16 | Intuitive Surgical Operations, Inc. | Method and system to sense relative partial-pose information using a shape sensor |
| US8183520B2 (en) * | 2009-11-13 | 2012-05-22 | Intuitive Surgical Operations, Inc. | Optical fiber shape sensor calibration |
| US20110164846A1 (en) * | 2010-01-06 | 2011-07-07 | Zhang Boying B | Fiber optic rotary joint using tec fiber |
| US9285246B2 (en) * | 2010-02-12 | 2016-03-15 | Intuitive Surgical Operations, Inc. | Method and system for absolute three-dimensional measurements using a twist-insensitive shape sensor |
| KR102257034B1 (ko) | 2013-03-15 | 2021-05-28 | 에스알아이 인터내셔널 | 하이퍼덱스트러스 수술 시스템 |
-
2010
- 2010-07-20 US US12/839,642 patent/US9285246B2/en active Active
-
2011
- 2011-01-28 EP EP18151706.1A patent/EP3339799B1/en active Active
- 2011-01-28 EP EP11703970.1A patent/EP2533717B1/en active Active
- 2011-01-28 WO PCT/US2011/022823 patent/WO2011100124A1/en active Application Filing
- 2011-01-28 KR KR1020187016375A patent/KR20180069090A/ko not_active Application Discontinuation
- 2011-01-28 CN CN201610034867.8A patent/CN105496557B/zh active Active
- 2011-01-28 KR KR1020177029839A patent/KR101868081B1/ko active IP Right Grant
- 2011-01-28 KR KR1020197004564A patent/KR102055636B1/ko active IP Right Grant
- 2011-01-28 CN CN201180009341.XA patent/CN102753114B/zh active Active
- 2011-01-28 JP JP2012552896A patent/JP5826770B2/ja active Active
- 2011-01-28 KR KR1020127020697A patent/KR101789542B1/ko active IP Right Grant
-
2015
- 2015-08-13 JP JP2015159895A patent/JP6457352B2/ja active Active
-
2016
- 2016-02-03 US US15/014,513 patent/US10028791B2/en active Active
- 2016-02-03 US US15/014,559 patent/US10588703B2/en active Active
- 2016-11-22 US US15/359,020 patent/US10687907B2/en active Active
-
2017
- 2017-06-08 JP JP2017113383A patent/JP6336661B2/ja active Active
-
2018
- 2018-05-02 JP JP2018088764A patent/JP2018118138A/ja not_active Withdrawn
-
2019
- 2019-11-27 JP JP2019214174A patent/JP7149923B2/ja active Active
-
2020
- 2020-02-11 US US16/788,045 patent/US11252141B2/en active Active
-
2021
- 2021-11-05 JP JP2021180894A patent/JP2022010080A/ja not_active Withdrawn
-
2022
- 2022-01-13 US US17/575,541 patent/US12023113B2/en active Active
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101868081B1 (ko) | 꼬임-비민감성 형상 센서를 사용하여 절대적 3-차원 측정을 위한 방법 및 시스템 | |
| CN106999153B (zh) | 在末端不固定的情况下使用光学形状感测对超声探头的自动跟踪和配准 | |
| US8896847B2 (en) | Method and system to sense relative partial-pose information using a shape sensor | |
| US20090324161A1 (en) | Fiber optic shape sensor | |
| WO2012101584A2 (en) | Optical shape sensing fiber for tip and shape characterization of medical instruments | |
| US8957367B2 (en) | Shape sensor contained in a link of a kinematic chain with at least one pre-set perturbation and method to sense relative partial-pose information using the shape sensor | |
| EP2996604B1 (en) | System for minimizing twist for optical shape sensing enabled instruments | |
| US20240350209A1 (en) | Method and system for operating a surgical instrument |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A107 | Divisional application of patent | ||
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application |