KR20160077471A - 복수 차선의 속도 검출 시스템 및 이를 이용한 복수 차선의 속도 검출 방법 - Google Patents
복수 차선의 속도 검출 시스템 및 이를 이용한 복수 차선의 속도 검출 방법 Download PDFInfo
- Publication number
- KR20160077471A KR20160077471A KR1020140187109A KR20140187109A KR20160077471A KR 20160077471 A KR20160077471 A KR 20160077471A KR 1020140187109 A KR1020140187109 A KR 1020140187109A KR 20140187109 A KR20140187109 A KR 20140187109A KR 20160077471 A KR20160077471 A KR 20160077471A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- lane
- radar
- speed
- signal
- Prior art date
Links
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/021—Auxiliary means for detecting or identifying radar signals or the like, e.g. radar jamming signals
- G01S7/022—Road traffic radar detectors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/10—Systems for measuring distance only using transmission of interrupted, pulse modulated waves
- G01S13/26—Systems for measuring distance only using transmission of interrupted, pulse modulated waves wherein the transmitted pulses use a frequency- or phase-modulated carrier wave
- G01S13/28—Systems for measuring distance only using transmission of interrupted, pulse modulated waves wherein the transmitted pulses use a frequency- or phase-modulated carrier wave with time compression of received pulses
- G01S13/282—Systems for measuring distance only using transmission of interrupted, pulse modulated waves wherein the transmitted pulses use a frequency- or phase-modulated carrier wave with time compression of received pulses using a frequency modulated carrier wave
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
- G01S13/581—Velocity or trajectory determination systems; Sense-of-movement determination systems using transmission of interrupted pulse modulated waves and based upon the Doppler effect resulting from movement of targets
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/052—Detecting movement of traffic to be counted or controlled with provision for determining speed or overspeed
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Radar Systems Or Details Thereof (AREA)
- Traffic Control Systems (AREA)
Abstract
본 발명 복수 차선의 속도 검출 시스템은 DAC로부터 제어 신호를 수신하여 레이더 신호를 출력하고 도로에서 주행중인 차량에 반사되어 수신되는 레이더 신호를 증폭부로 전송하는 레이더부와, MCU의 제어 신호를 수신하여 아날로그 신호로 변환하여 레이더부로 전송하는 DAC와, 상기 레이더부에서 수신되는 반사 레이더 신호를 증폭하는 증폭부와, 상기 증폭부에서 증폭된 반사 레이더 신호를 디지털 신호로 변환하여 MCU로 전송하는 ADC와, 레이더 신호를 차량 쪽으로 전송하도록 제어 신호를 DAC로 전송하고 상기 ADC로부터 반사 레이더 신호를 수신하여 차량 검출 알고리즘에 의하여 주행 차량을 검출하고 차량과의 탐지거리, 탐지시간 및 차량과의 거리에 따른 차선을 판별하고 각 차선을 주행하는 차량의 속도를 산정하고 각 차선을 주행하는 각 차량 속도 정보를 메모리에 저장하고 각 차량 속도 정보를 서버로 전송하도록 제어하는 MCU와, MCU의 제어에 의하여 각 차선별 차량 속도 정보를 서버로 송신하기 위한 송수신부와, 상기 MCU로부터 송수신부를 거쳐서 수신된 차선별 각 차량 속도 값을 표시부를 통하여 표출하는 서버로 구성된 것을 특징으로 하는 것이다.
Description
본 발명은 한대의 FMCW( Frequency Modulation Continuous Wave) 레이더를 이용하여 복수의 차선에 대한 차량 속도를 검출하는 것에 관한 것이다. 일반적으로 현재는 차선별로 루프 감지기를 설치하거나 영상 감지기를 설치하여 하나의 차선을 주행하는 차량에 대하여 각 차선별로 속도를 검출하도록 구성되어 있는 것이다. 또한 도플러 주파수를 측정하여 차선을 주행하는 차량에 대한 차량 속도를 측정하는 방법에 공지되어 있으나 이는 측정된 속도가 부정확한 문제점이 있는 것이다.
본 발명과 관련된 종래의 기술은 대한민국 공개특허 공보 제10-2014-0014159호(2014. 02. 05. 공개)에 개시되어 있는 것이다. 도 1은 상기 종래의 다중 송신기와 비트 주파수 멀티플렉서를 구비한 에프엠씨더블류(FMCW) 레이더 시스템 구성도이다. 상기도 1에서 종래의 FMCW 레이더 시스템은 복수의 송신기(10), 스윕 동기회로(12), 수신기(14) 및 신호 처리회로(16)로 구성된 것을 나타내고 있는 것이다. 상기에서 각각의 송신기(10)는 제어 가능한 발진기(100)와 제어 가능한 발진기(100)에 연결된 입력을 가진 송신기 안테나(102)로 구성되어 있다. 또한, 송신기(10)의 제어 가능한 발진기(100)는 코먼 클럭 회로(미도시)(common clock circuit)의 제어 아래 동작하는 디지털 발전기 일 수 있고, 클럭 신호(clock signal)로 정의된 일련의 타임 포인트에 대해 연속적인 타임 디스크리트 디지털 오실레이터 신호 값을 결정하고, 이값을 아날로그 신호로 변환할 수 있는 오실레이트이다. 또한, 다른 송신기(10)의 송신기 안테나는 공간 어레이로 배열되고 스윕 동기회로(12)는 송신기(10)의 제어 가능한 발진기(100)의 입력을 제어하기 위하여 결합된 복수의 출력을 가지고 있는 것이다. 또한, 수신기(14)는 안테나(140), 제어 가능한 국부 발진기(142) 및 믹서(144)로 구성되어 있으며 제어 가능한 국부 발진기(142)는 송신기(10)의 제어 가능한 발진기(100)와 동일한 클럭회로(미도시)의 제어 하에 동작하는 디지털오실레이터일 수 있는 것이다. 또한, 믹서(144)는 안테나(140)와 국부 발진기(142)에 결합된 신호 입력을 가지며 제어 가능한 국부 발진기(142)는 스윕 동기회로(12)의 출력과 결합된 제어 입력을 가진다. 또한, 믹서(144)는 신호 처리회로(16)와 결합된 출력을 가지며 신호 처리회로(16)는 복수의 대역필터모듈(band filter module)(예를 들어, 아날로그 또는 디지털 필터모듈)과 조합모듈(162)로 구현될 수 있는 필터 뱅크(160)로 구성되어 있는 것이다. 또한, 필터 뱅크(160)는 수신기(14)의 출력과 연결된 입력(예를 들면 필터 뱅크에서 대역필터모듈은 입력을 가진다)과 조합모듈(162)에 연결된 출력을 가지며 스윕 동기회로(12)는 서로에 대해 상호 타임오프셋에서 같은 주파수 스윕을 수행하는 송신기(10)의 제어 가능한 발진기(100)를 제어하는 것이고, 상기 스윕 동기회로(12)는 유사한 스윕을 수행하는 국부발진기(142)를 제어하는 것이다.
상기와 같은 종래의 멀티플렉서를 구비한 에프엠씨더블류(FMCW) 레이더 시스템은 물체를 검출할 수 있으나 이를 이용하여 복수 차선의 차량 속도를 검출할 수 없는 문제점이 있는 것이다. 또한 상기와 같은 종래의 기술은 복수의 송신기를 구비하고 있어 시스템 구축에 비용이 과다 소요되는 문제점이 있는 것이다. 따라서 본 발명의 목적은 FMCW 레이더를 이용하여 복수 차선을 주행하는 차량의 속도를 각각 검출하기 위한 것이다. 또한 본 발명의 다른 목적은 하나의 FMCW 레이더를 이용하여 다수 차선을 주행하는 차량의 속도를 검출하기 위한 것이다.
상기와 같은 목적을 가진 본 발명 복수 차선의 속도 검출 시스템은 DAC로부터 제어 신호를 수신하여 레이더 신호를 출력하고 도로에서 주행중인 차량에 반사되어 수신되는 레이더 신호를 증폭부로 전송하는 레이더부와, MCU의 제어 신호를 수신하여 아날로그 신호로 변환하여 레이더부로 전송하는 DAC와, 상기 레이더부에서 수신되는 반사 레이더 신호를 증폭하는 증폭부와, 상기 증폭부에서 증폭된 반사 레이더 신호를 디지털 신호로 변환하여 MCU로 전송하는 ADC와, 레이더 신호를 차량 쪽으로 전송하도록 제어 신호를 DAC로 전송하고 상기 ADC로부터 반사 레이더 신호를 수신하여 차량 검출 알고리즘에 의하여 주행 차량을 검출하고 차량과의 탐지거리, 탐지시간 및 차량과의 거리에 따른 차선을 판별하고 각 차선을 주행하는 차량의 속도를 산정하고 각 차선을 주행하는 각 차량 속도 정보를 메모리에 저장하고 각 차선별 각 차량 속도 정보를 서버로 전송하도록 제어하는 MCU와, MCU의 제어에 의하여 각 차선별 각 차량 속도 정보를 서버로 송신하기 위한 송수신부와, 상기 MCU로부터 송수신부를 거쳐서 수신된 차선별 각 차량 속도 값을 표시부를 통하여 표출하는 서버로 구성된 것을 특징으로 하는 것이다.
상기와 같이 구성된 본 발명 복수 차선의 속도 검출 시스템 및 이를 이용한 복수 차선의 속도 검출 방법은 하나의 레이더부를 이용하여 복수의 차선을 주행하는 각 차량의 속도를 산정할 수 있는 효과가 있는 것이다. 또한 본 발명의 복수 차선의 속도 검출 시스템 및 이를 이용한 복수 차선의 속도 검출 방법은 시스템 구성이 단순하여 설치 비용이 저렴하고 유지 관리 비용이 저렴한 효과가 있는 것이다.
도 1은 종래의 다중 송신기와 비트 주파수 멀티플렉서를 구비한 에프엠씨더블류(FMCW) 레이더 시스템 구성도,
도 2는 본 발명 복수 차선의 차량 속도 검출 시스템 전체 구성도,
도 3은 본 발명 복수 차선의 차량 속도 검출 시스템이 적용되는 레이더부 제1실시 예 설치 예시도,
도 4는 본 발명 복수 차선의 차량 속도 검출 시스템이 적용되는 레이더부 제2실시 예 설치 예시도,
도 5는 본 발명에 적용되는 것으로 차량에 레이더 신호를 전송하는 상태도,
도 6은 상기도 5로부터 생성되는 비트 주파수 그래프,
도 7은 상기도 6으로부터 생성되는 상승 비트 주파수와 하강 비트 주파수 그래프,
도 8은 본 발명 복수 차선의 차량 속도 검출 방법에 대한 제어 흐름도,
도 9는 도 8의 C 후단에 이어지는 흐름도,
도 10은 탐지 거리의 보정을 나타내는 그래프이다.
도 2는 본 발명 복수 차선의 차량 속도 검출 시스템 전체 구성도,
도 3은 본 발명 복수 차선의 차량 속도 검출 시스템이 적용되는 레이더부 제1실시 예 설치 예시도,
도 4는 본 발명 복수 차선의 차량 속도 검출 시스템이 적용되는 레이더부 제2실시 예 설치 예시도,
도 5는 본 발명에 적용되는 것으로 차량에 레이더 신호를 전송하는 상태도,
도 6은 상기도 5로부터 생성되는 비트 주파수 그래프,
도 7은 상기도 6으로부터 생성되는 상승 비트 주파수와 하강 비트 주파수 그래프,
도 8은 본 발명 복수 차선의 차량 속도 검출 방법에 대한 제어 흐름도,
도 9는 도 8의 C 후단에 이어지는 흐름도,
도 10은 탐지 거리의 보정을 나타내는 그래프이다.
상기와 같은 목적을 가진 본 발명 복수 차선의 차량 속도 검출 시스템 및 이를 이용한 복수 차선의 차량 속도 검출 방법을 도 2 내지 도 10을 참고로 하여 설명하면 다음과 같다.
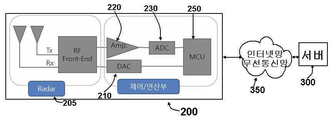
도 2는 본 발명 복수 차선의 차량 속도 검출 시스템 전체 구성도이다. 상기도 2에서 본 발명 복수 차선의 차량 속도 검출 시스템은 DAC로부터 제어 신호를 수신하여 레이더 신호를 출력하고 도로에서 주행중인 차량에 반사되어 수신되는 레이더 신호를 증폭부로 전송하는 레이더(205)와, MCU의 제어 신호를 수신하여 아날로그 신호로 변환하여 레이더(205)로 전송하는 DAC(Digital Analog Converter, 210)와, 상기 레이더에서 수신되는 반사 레이더 신호를 증폭하는 증폭부(220)와, 상기 증폭부에서 증폭된 반사 레이더 신호를 디지털 신호로 변환하여 MCU로 전송하는 ADC(Analog Digital Converter, 230)와, 레이더 신호를 차량 쪽으로 전송하도록 제어 신호를 DAC로 전송하고 상기 ADC로부터 반사 레이더 신호를 수신하여 푸리에 변환하고 MTI(Moving Target Indicator) 및 차량 검출 알고리즘에 의하여 주행 차량을 검출하고 차량과의 탐지 거리, 탐지 시간 및 차량과의 거리에 따른 차선을 판별하고 각 차선을 주행하는 차량의 속도를 산정하고 각 차선을 주행하는 각 차량 속도 정보를 메모리에 저장하고, 각 차선별 각 차량 속도 정보를 서버로 전송하도록 제어하는 MCU(250)와, MCU의 제어에 의하여 각 차선별 차량 속도 정보를 서버로 송신하기 위한 송수신부(260)와, 상기 MCU로부터 송수신부를 거쳐서 수신된 차선별 각 차량 속도 값을 저장하고 표시부를 통하여 표출하는 서버(300) 및 레이더부(200)와 서버를 연결하는 인터넷망 또는 무선 통신망(350)으로 구성된 것을 특징으로 하는 것이다.
도 3은 본 발명 복수 차선의 차량 속도 검출 시스템이 적용되는 레이더부 제1실시 예 설치 예시도 이다. 상기도 3에서 본 발명 복수 차선의 차량 속도 검출 시스템이 적용되는 레이더부(200) 제1실시 예는 복수의 n차선이 존재하고 복수의 n차선을 주행하는 차량(400)이 존재하는 경우 각 차선별 주행하는 차량의 속도를 산정하기 위하여 레이더부의 설치 상태 도를 나타내는 것이다. 상기도 3에서 도플러 효과를 이용하여 각 차선을 판별하기 위하여는 레이더부에서 송출하는 레이더 신호가 차량에 반사되어 레이더부로 수신될 수 있도록 차선에 일정각도(θ) 경사지게 설치하는 것임을 예시로 보여주고 있는 것이다. 만약 레이더부가 차선과 직각으로 설치되어 레이더 신호를 차량으로 송신하는 경우 내측 차선을 주행하는 차량은 탐지될 수 있으나 외측 차선을 주행하는 차량은 내측 차선의 차량에 의하여 방해되어 차량 검출에 오류가 발생할 수 있는 것이다.
도 4는 본 발명 복수 차선의 차량 속도 검출 시스템이 적용되는 레이더부 제2실시 예 설치 예시도 이다. 상기도 4에서 본 발명 복수 차선의 차량 속도 검출 시스템이 적용되는 레이더부(200) 제2실시 예는 1차선과 2차선으로 구성되고 도로 일측에 지주를 세우고 레이더부를 지주의 상단에 설치되는 것으로서 내측 차선인 1차선과 외측 차선인 2차선을 각각 주행하는 차량에 대하여 레이더 신호를 송신하여 각 차량에 반사되는 레이더 신호를 수신하는데 아무 문제가 없도록 설치되는 경우이다. 상기에서 2차선의 경우에 대하여 예를 들었으나 3차선 또는 n차선으로 확대할 수 있는 것이다.
도 5는 본 발명에 적용되는 것으로 차량에 레이더 신호를 전송하는 상태도 이다. 상기도 5에서 레이더부(200)에서 송신되는 레이더 신호를 각 차선을 주행하는 차량(400)으로 전송하고 상기 차량에 반사되어 레이더부로 수신될 수 있는 것으로서 레이더부에서 전송되는 레이더 신호의 주파수가 f이면 차량에 반사되어 레이더부로 수신되는 주파수는 f + fD가 되는 것임을 나타내고 있는 것이다. 상기에서 fD는 도플러 주파수이다.
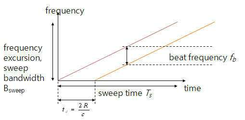
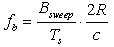
도 6은 상기도 5로부터 생성되는 비트 주파수 그래프이다. 상기도 5에서 레이더부에서 차량까지의 거리가 R이고, 레이더 신호의 스윕 대역폭(Sweep Bandwidth), Bsweep 이고, 레이더 신호의 주기가 Ts이면 레이더부에서 차량까지의 차량 탐지 시간 td= 2R/c 이고, td/Ts= fb/Bsweep 및 R = cTsfb /2Bsweep로 나타낼 수 있는 것이다. 또한 도플러 주파수는 fD= 2Vr/λ로 나타낼 수 있는 것이다. 여기에서 c는 빛의 속도이고, Vr 은 차량의 속도이고, λ는 레이더 신호의 파장을 나타내고 있는 것이다. 차량까지의 탐지 시간이 측정되면 레이더부에서 차량까지의 거리 R을 구할 수 있으며 비트 주파수 fb를 구할 수 있는 것이다.
도 7은 상기도 6으로부터 생성되는 상승 비트 주파수와 하강 비트 주파수 그래프이다. 상기도 7에서 비트 주파수는 식 (1)로 표시할 수 있는 것이다.
또한, 도플러 주파수(상기 fD 와 동일함)는 다음 식(2)로 나타낼 수 있는 것이다.

따라서 상기도 7에서 비트 주파수를 상승 시 비트 주파수 및 하강 시 비트 주파수로 분리하면 다음 식(3)과 같이 나타낼 수 있는 것이다.

상기 식(1), 식(2) 및 식(3)으로부터 레이더부에서 차량까지의 거리 및 차량의 속도는 아래 식(4)로 나타낼 수 있는 것이다.

도 8은 본 발명 복수 차선의 차량 속도 검출 방법에 대한 제어 흐름도이고 도 9는 도 8의 C 후단에 이어지는 흐름도이다. 상기도 8 및 도 9에서 본 발명 복수 차선의 차량 속도 검출 방법은 레이더부의 MCU 제어에 의하여 레이더부에서 레이더신호를 복수의 n 차선으로 송신하는 단계(S11)와, 도로에서 복수의 n 차선에 차량이 주행하여 주행하는 차량으로부터 반사하는 레이더 신호를 각각 수신하여 차량까지의 제1탐지 거리 내지 제n탐지 거리 및 제1탐지 시간 내지 제n탐지 시간을 산정하는 단계(S12)와, 탐지 거리를 기초로 하여 거리에 따른 각 차선을 판별하는 단계(S13)와, 기 주어진 레이더 신호 스윕 대역폭, 레이더 신호 주파수, 레이더 신호 주기, 파장, 빛의 속도와 상기 제1탐지 거리 내지 제n탐지거리 및 제1탐지 시간 내지 제n탐지 시간을 이용하여 각 차선을 주행하는 각 차량에 대하여 비트 주파수와 도플러 주파수를 산정하는 단계(S14)와, 상승 시 비트 주파수 및 하강 시 비트 주파수를 상기 각 차선을 주행하는 차량에 대한 각 비트 주파수와 각 도플러 주파수의 중첩식으로 산정하는 단계(S15)와, 레이더부에서 각 차선을 주행하는 차량까지의 제1탐지 거리 내지 제n탐지 거리를 각 차량에 대한 상승 시 비트 주파수 및 하강 시 비트 주파수를 이용하여 산정하는 단계(S16)와, 상기 제1탐지거리 내지 제n탐지거리를 보정하는 단계(S17)와, 복수의 n 차선을 주행하는 차량에 레이더 신호를 다시 송신하는 단계(S18)와, 복수의 n차선을 주행하는 각 차량에서 반사된 레이더 신호를 각각 수신하는 단계(S19)와, 레이더부에서 각 차량까지의 제1-1탐지 거리 내지 제n-1탐지 거리 및 제1-1탐지 시간 내지 제n-1탐지 시간을 산정하는 단계(S20)와, 탐지 거리를 기초로 거리에 따른 각 차선을 판별하는 단계(S21)와, 기 주어진 레이더 신호 스윕 대역폭, 레이더 신호 주파수, 레이더 신호 주기, 파장, 빛의 속도와 상기 제1-1탐지 거리 내지 제n-1탐지거리 및 제1-1탐지 시간 내지 제n-1탐지 시간을 이용하여 각 차선을 주행하는 각 차량에 대하여 비트 주파수와 도플러 주파수를 산정하는 단계(S22)와, 상승 시 비트 주파수 및 하강 시 비트 주파수를 상기 각 차선을 주행하는 차량에 대한 각 비트 주파수와 도플러 주파수의 중첩식으로 산정하는 단계(S23)와, 레이더부에서 각 차선을 주행하는 차량까지의 제1-1탐지 거리 내지 제n-1탐지 거리를 각 차량에 대한 상승 시 비트 주파수 및 하강 시 비트 주파수를 이용하여 산정하는 단계(S24)와, 상기 제1-1 탐지 거리 내지 제n-1 탐지거리를 보정하는 단계(S25)와, 속도 = (보정된 제1-1 탐지거리 - 보정된 제1탐지 거리)/(제1-1탐지 시간 - 제1탐지 시간)와 같은 산정식에 의하여 각 차선을 주행하는 각 차량의 속도를 산정하는 단계(S26)와, 산정된 각 차선을 주행하는 각 차량의 속도를 서버로 전송하는 단계(S27)와, 서버가 수신된 차선별로 주행하는 각 차량의 속도를 표시부를 통하여 표출하는 단계(S28)를 포함하여 이루어지는 것을 특징으로 하는 것이다. 상기에서 차선 n에 주행하는 차량이 없거나 정차한 경우에는 차선 n에 차량 속도는 산정하지 아니하거나 0으로 표시할 수 있는 것이다. 또한 상기에서 제1탐지 거리 내지 제n탐지거리는 레이더부에서 제1차선 내지 제n차선을 주행하는 각 차량까지의 탐지거리이고, 제1탐지 시간 내지 제n탐지 시간은 레이더부에서 제1차선 내지 제n차선을 주행하는 각 차량의 탐지 시간을 나타내고 있는 것이다. 또한 상기 차선이 하나인 경우 차선을 운행하는 차량의 속도를 검출하는 방법은 차선을 주행하는 차량에 레이더 신호를 송신하는 단계와, 차선을 주행하는 차량에서 반사된 레이더 신호를 수신하는 단계와, 레이더부에서 차량까지의 탐지 거리 및 탐지 시간을 산정하는 단계와, 기 주어진 레이더 신호 스윕 대역폭, 레이더 신호 주파수, 레이더 신호 주기, 파장, 빛의 속도와 상기 탐지거리 및 탐지 시간을 이용하여 차선을 주행하는 차량에 대하여 비트 주파수와 도플러 주파수를 산정하는 단계와, 상승 시 비트 주파수 및 하강 시 비트 주파수를 상기 차선을 주행하는 차량에 대한 비트 주파수와 도플러 주파수의 중첩식으로 산정하는 단계와, 레이더부에서 차선을 주행하는 차량까지의 탐지 거리를 차량에 대한 상승 시 비트 주파수 및 하강 시 비트 주파수를 이용하여 산정하는 단계와, 상기 탐지거리를 보정하는 단계와, 속도 = (보정된 탐지거리)/(탐지 시간)과 같은 산정식에 의하여 차선을 주행하는 차량의 속도를 산정하는 단계와, 산정된 차선을 주행하는 차량의 속도를 서버로 전송하는 단계와, 서버가 수신된 차선에 주행하는 차량의 속도를 표시부를 통하여 표출하는 단계를 포함하여 이루어질 수 있는 것이다.
도 10은 탐지 거리의 보정을 나타내는 그래프이다. 상기도 10에서 보정전 탐지거리는 레이더부에서 차량까지의 탐지거리이므로 차선을 주행하는 차량의 속도를 산정하기 위하여는 탐지 거리를 보정하여야 하는 것이다. 상기에서 보정이라 함을 레이더부에서 차량까지의 거리를 실제 차량 이동 거리로 보정하여야 하는 것이다. 따라서 상기도 10에서 레이더부의 레이더 신호 송신 방향과 차선과의 각도를 θ라고 하면 보정된 탐지 거리(실제 차량 이동거리) = 레이더부에서 차량까지의 탐지 거리 x cos(θ)로 산정될 수 있는 것이다.
10 : 송신기, 12 : 스윕 동기회로,
14 : 수신기, 100 : 발진기,
102 : 송신기 안테나, 200 : 레이더부,
205 : 레이더, 210 : DAC,
220 : 증폭기, 250 :MCU
14 : 수신기, 100 : 발진기,
102 : 송신기 안테나, 200 : 레이더부,
205 : 레이더, 210 : DAC,
220 : 증폭기, 250 :MCU
Claims (18)
- 복수의 차선을 주행하는 차량들이 존재하는 경우 각 차선을 주행하는 차량의 속도를 검출하기 위한 복수 차선의 차량 속도 검출 레이더부에 있어서,
상기 복수 차선의 차량 속도 검출 레이더부는,
DAC로부터 제어 신호를 수신하여 레이더 신호를 출력하고 도로에서 주행중인 차량에 반사되어 수신되는 레이더 신호를 증폭부로 전송하는 레이더(205)와;
MCU의 제어 신호를 수신하여 아날로그 신호로 변환하여 레이더(205)로 전송하는 DAC(Digital Analog Converter, 210)와;
상기 레이더에서 수신되는 반사 레이더 신호를 증폭하는 증폭부(220)와;
상기 증폭부에서 증폭된 반사 레이더 신호를 디지털 신호로 변환하여 MCU로 전송하는 ADC(Analog Digital Converter, 230);
및 레이더 신호를 차량 쪽으로 전송하도록 제어 신호를 DAC로 전송하고 상기 ADC로부터 반사 레이더 신호를 수신하여 주행 차량을 검출하고 차량과의 탐지 거리, 탐지 시간 및 차량과의 거리에 따른 각 차선을 판별하고 각 차선을 주행하는 차량의 속도를 산정하고 각 차선을 주행하는 각 차량 속도 정보를 메모리에 저장하도록 제어하는 MCU(250)로 구성된 것을 특징으로 하는 복수 차선의 차량 속도 검출 레이더부.
- 제1항에 있어서,
상기 복수 차선의 차량 속도 검출 레이더부는,
각 차선을 주행하는 각 차량에 대한 비트 주파수 및 도플러 주파수를 이용하여 각 차선을 주행하는 차량의 속도를 산정하는 것을 특징으로 하는 복수 차선의 차량 속도 검출 레이더부.
- 제1항 또는 제2항에 있어서,
상기 레이더부의 레이더는,
레이더 신호 송신 방향이 도로의 차선과 경사각(θ)을 이루어 레이더부가 차량에서 반사되는 레이더 신호를 수신할 수 있는 것을 특징으로 하는 복수 차선의 차량 속도 검출 레이더부.
- 복수의 차선을 주행하는 차량들이 존재하는 경우 각 차선을 주행하는 차량의 속도를 검출하기 위한 복수 차선의 차량 속도 검출 시스템에 있어서,
상기 복수 차선의 차량 속도 검출 시스템은,
DAC로부터 제어 신호를 수신하여 레이더 신호를 출력하고 도로에서 주행중인 차량에 반사되어 수신되는 레이더 신호를 증폭부로 전송하는 레이더(205)와;
MCU의 제어 신호를 수신하여 아날로그 신호로 변환하여 레이더(205)로 전송하는 DAC(Digital Analog Converter, 210)와;
상기 레이더에서 수신되는 반사 레이더 신호를 증폭하는 증폭부(220)와;
상기 증폭부에서 증폭된 반사 레이더 신호를 디지털 신호로 변환하여 MCU로 전송하는 ADC(Analog Digital Converter, 230)와;
레이더 신호를 차량 쪽으로 전송하도록 제어 신호를 DAC로 전송하고 상기 ADC로부터 반사 레이더 신호를 수신하여 주행 차량을 검출하고 차량 검출 알고리즘에 의하여 차량과의 탐지 거리, 탐지 시간 및 차량과의 거리에 따른 차선을 판별하고 각 차선을 주행하는 차량의 속도를 산정하고 각 차선을 주행하는 각 차량 속도 정보를 메모리에 저장하고 각 차선별 각 차량 속도 정보를 서버로 전송하도록 제어하는 MCU(250)와;
MCU의 제어에 의하여 각 차선별 차량 속도 정보를 서버로 송신하기 위한 송수신부(260)와;
상기 MCU로부터 송수신부를 거쳐서 수신된 차선별 각 차량 속도 값을 저장하고 표시부를 통하여 표출하는 서버(300);
및 레이더부(200)와 서버를 연결하는 인터넷망 또는 무선 통신망(350)으로 구성된 것을 특징으로 하는 복수 차선의 차량 속도 검출 시스템.
- 제4항에 있어서,
상기 복수 차선의 차량 속도 검출 시스템은,
각 차선을 주행하는 각 차량에 대한 비트 주파수 및 도플러 주파수를 이용하여 각 차선을 주행하는 차량의 속도를 산정하는 것을 특징으로 하는 복수 차선의 차량 속도 검출 시스템.
- 제4항 또는 제5항에 있어서,
상기 레이더부의 레이더는,
레이더 신호 송신 방향이 도로의 차선과 경사각(θ)을 이루어 레이더부가 차량에서 반사되는 레이더 신호를 수신할 수 있는 것을 특징으로 하는 복수 차선의 차량 속도 검출 시스템.
- 복수의 차선을 주행하는 차량들이 존재하는 경우 각 차선을 주행하는 차량의 속도를 검출하기 위한 복수 차선의 차량 속도 검출 방법에 있어서,
상기 복수 차선의 차량 속도 검출 방법은,
레이더부의 MCU 제어에 의하여 레이더부에서 레이더신호를 복수의 n 차선으로 송신하는 단계(S11)와;
도로에서 복수의 n 차선에 차량이 주행하여 주행하는 차량으로부터 반사하는 레이더 신호를 각각 수신하여 차량까지의 제1탐지 거리 내지 제n탐지 거리 및 제1탐지 시간 내지 제n탐지 시간을 산정하는 단계(S12)와;
거리에 따른 각 차선을 판별하는 단계(S13)와;
기 주어진 레이더 신호 스윕 대역폭, 레이더 신호 주파수, 레이더 신호 주기, 파장, 빛의 속도와 상기 제1탐지 거리 내지 제n탐지거리 및 제1탐지 시간 내지 제n탐지 시간을 이용하여 각 차선을 주행하는 각 차량에 대하여 비트 주파수와 도플러 주파수를 산정하는 단계(S14)와;
상승 시 비트 주파수 및 하강 시 비트 주파수를 상기 각 차선을 주행하는 차량에 대한 각 비트 주파수와 각 도플러 주파수의 중첩식으로 산정하는 단계(S15)와;
레이더부에서 각 차선을 주행하는 차량까지의 제1탐지 거리 내지 제n탐지 거리를 각 차량에 대한 상승 시 비트 주파수 및 하강 시 비트 주파수를 이용하여 산정하는 단계(S16)와;
상기 제1탐지거리 내지 탐지거리를 보정하는 단계(S17)와;
복수의 n 차선을 주행하는 차량에 레이더 신호를 다시 송신하는 단계(S18)와;
복수의 n차선을 주행하는 각 차량에서 반사된 레이더 신호를 각각 수신하는 단계(S19)와;
레이더부에서 각 차량까지의 제1-1탐지 거리 내지 제n-1탐지 거리 및 제1-1탐지 시간 내지 제n-1탐지 시간을 산정하는 단계(S20)와;
거리에 따른 각 차선을 판별하는 단계(S21)와;
기 주어진 레이더 신호 스윕 대역폭, 레이더 신호, 레이더 신호 주기, 파장, 빛의 속도와 상기 제1-1탐지 거리 내지 제n-1탐지거리 및 제1-1탐지 시간 내지 제n-1탐지 시간을 이용하여 각 차선을 주행하는 각 차량에 대하여 비트 주파수와 도플러 주파수를 산정하는 단계(S22)와;
상승 시 비트 주파수 및 하강 시 비트 주파수를 상기 각 차선을 주행하는 차량에 대한 각 비트 주파수와 도플러 주파수의 중첩식으로 산정하는 단계(S23)와;
레이더부에서 각 차선을 주행하는 차량까지의 제1-1탐지 거리 내지 제n-1탐지 거리를 각 차량에 대한 상승 시 비트 주파수 및 하강 시 비트 주파수를 이용하여 산정하는 단계(S24)와;
상기 제1-1 탐지 거리 내지 제n-1 탐지거리를 보정하는 단계(S25);
및 속도 = (보정된 제1-1 탐지거리 - 보정된 제1탐지 거리)/(제1-1탐지 시간 - 제1탐지 시간)과 같은 산정식에 의하여 각 차선을 주행하는 각 차량의 속도를 산정하는 단계(S26)를 포함하여 이루어지는 것을 특징으로 하는 복수 차선의 차량 속도 검출 방법.
- 제7항에 있어서,
상기 비트 주파수는,
로 주어지고,
상기 도플러 주파수는,
로 주어지며 R은 레이더부에서 차량까지의 거리가 R이고, Bsweep은 레이더 신호의 스윕 대역폭(Sweep Bandwidth), Ts는 레이더 신호의 주기, c는 빛의 속도이고, Vr은 차량의 속도이고, λ는 레이더 신호의 파장인 것을 특징으로 하는 복수 차선의 차량 속도 검출 방법.
- 제7항에 있어서,
상기 중첩식은,
로 주어지고 fbu는 상승 시 비트 주파수이고, fbd는 하강 시비트 주파수인 것을 특징으로 하는 복수 차선의 차량 속도 검출 방법.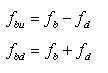
- 제7항에 있어서,
상기 레이더부에서 각 차선을 주행하는 차량까지의 탐지거리 산정식은,
로 주어지는 것을 특징으로 하는 복수차선의 차량 속도 검출 방법.
- 제7항에 있어서,
상기 각 차선을 주행하는 차량 속도는,
로 주어지는 것을 특징으로 하는 복수차선의 차량 속도 검출 방법.
- 제7항에 있어서,
상기 복수차선의 차량 속도 검출 방법은,
산정된 각 차선을 주행하는 각 차량의 속도를 서버로 전송하고 수신된 차선별로 주행하는 각 차량의 속도를 서버의 표시부를 통하여 표출하는 단계(S28)를 더 포함하여 이루어지는 것을 특징으로 하는 복수차선의 차량 속도 검출 방법.
- 제7항 내지 제12항의 어느 한 항에 있어서,
차선 n에 주행하는 차량이 없거나, 정차한 것으로 판단되는 경우 차선 n에 차량 속도는 산정하지 아니하거나 0으로 표시하는 것을 특징으로 하는 복수차선의 차량 속도 검출 방법.
- 하나의 차선을 주행하는 차량이 존재하는 경우 차선을 주행하는 차량의 속도를 검출하기 위한 차선의 차량 속도 검출 방법에 있어서,
상기 차선의 차량 속도 검출 방법은,
차선을 주행하는 차량에 레이더 신호를 송신하는 단계와;
차선을 주행하는 차량에서 반사된 레이더 신호를 수신하는 단계와;
레이더부에서 차량까지의 탐지 거리 및 탐지 시간을 산정하는 단계와;
기 주어진 레이더 신호 스윕 대역폭, 레이더 신호 주파수, 레이더 신호 주기, 파장, 빛의 속도와 상기 탐지거리 및 탐지 시간을 이용하여 차선을 주행하는 차량에 대하여 비트 주파수와 도플러 주파수를 산정하는 단계와;
상승 시 비트 주파수 및 하강 시 비트 주파수를 상기 차선을 주행하는 차량에 대한 비트 주파수와 도플러 주파수의 중첩식으로 산정하는 단계와;
레이더부에서 차선을 주행하는 차량까지의 탐지 거리를 차량에 대한 상승 시 비트 주파수 및 하강 시 비트 주파수를 이용하여 산정하는 단계와;
상기 탐지거리를 보정하는 단계;
및 속도 = (보정된 탐지거리)/(탐지 시간)과 같은 산정식에 의하여 차선을 주행하는 차량의 속도를 산정하는 단계를 포함하여 이루어지는 것을 특징으로 하는 차선의 차량 속도 검출 방법.
- 제14항에 있어서,
상기 비트 주파수는,
로 주어지고,
상기 도플러 주파수는,
로 주어지며 R은 레이더부에서 차량까지의 거리가 R이고, Bsweep은 레이더 신호의 스윕 대역폭(Sweep Bandwidth), Ts는 레이더 신호의 주기, c는 빛의 속도이고, Vr은 차량의 속도이고, λ는 레이더 신호의 파장인 것을 특징으로 하는 차선의 차량 속도 검출 방법.
- 제14항 또는 제15항에 있어서,
상기 중첩식은,
로 주어지고 fbu는 상승 시 비트 주파수이고, fbd는 하강 시비트 주파수인 것을 특징으로 하는 차선의 차량 속도 검출 방법.
- 제14항 또는 제15항 또는 제16항에 있어서,
상기 레이더부에서 각 차선을 주행하는 차량까지의 탐지거리 산정식은,
로 주어지는 것을 특징으로 하는 차선의 차량 속도 검출 방법.
- 제14항 또는 제15항 또는 제16항 또는 제17항에 있어서,
상기 각 차선을 주행하는 차량 속도는,
로 주어지는 것을 특징으로 하는 차선의 차량 속도 검출 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020140187109A KR101651644B1 (ko) | 2014-12-23 | 2014-12-23 | 복수 차선의 속도 검출 시스템 및 이를 이용한 복수 차선의 속도 검출 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020140187109A KR101651644B1 (ko) | 2014-12-23 | 2014-12-23 | 복수 차선의 속도 검출 시스템 및 이를 이용한 복수 차선의 속도 검출 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20160077471A true KR20160077471A (ko) | 2016-07-04 |
| KR101651644B1 KR101651644B1 (ko) | 2016-08-29 |
Family
ID=56500919
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020140187109A KR101651644B1 (ko) | 2014-12-23 | 2014-12-23 | 복수 차선의 속도 검출 시스템 및 이를 이용한 복수 차선의 속도 검출 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101651644B1 (ko) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003270342A (ja) * | 2002-03-19 | 2003-09-25 | Denso Corp | 物体認識装置、物体認識方法、レーダ装置 |
| KR101092567B1 (ko) * | 2010-09-16 | 2011-12-13 | 재단법인대구경북과학기술원 | Fmcw 레이더 및 이를 이용한 이동물체의 거리속도 검출방법 |
| KR101356169B1 (ko) * | 2012-09-06 | 2014-01-24 | 국방과학연구소 | Fmcw 레이더 시스템 및 fmcw 레이더 시스템의 레이더센서 운용방법 |
| KR101360572B1 (ko) * | 2012-09-24 | 2014-02-11 | 재단법인대구경북과학기술원 | Fmcw 레이더의 다중 타겟 탐지방법 및 장치 |
-
2014
- 2014-12-23 KR KR1020140187109A patent/KR101651644B1/ko active IP Right Grant
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003270342A (ja) * | 2002-03-19 | 2003-09-25 | Denso Corp | 物体認識装置、物体認識方法、レーダ装置 |
| KR101092567B1 (ko) * | 2010-09-16 | 2011-12-13 | 재단법인대구경북과학기술원 | Fmcw 레이더 및 이를 이용한 이동물체의 거리속도 검출방법 |
| KR101356169B1 (ko) * | 2012-09-06 | 2014-01-24 | 국방과학연구소 | Fmcw 레이더 시스템 및 fmcw 레이더 시스템의 레이더센서 운용방법 |
| KR101360572B1 (ko) * | 2012-09-24 | 2014-02-11 | 재단법인대구경북과학기술원 | Fmcw 레이더의 다중 타겟 탐지방법 및 장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101651644B1 (ko) | 2016-08-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11099269B2 (en) | Radar device for vehicle and target determination method therefor | |
| US9063225B2 (en) | High resolution Doppler collision avoidance radar | |
| US9400324B2 (en) | Radar device | |
| US7843381B2 (en) | Radar device | |
| GB2545098A (en) | Vehicle navigation system having location assistance from neighboring vehicles | |
| JP4281632B2 (ja) | 物標検出装置 | |
| JP4396436B2 (ja) | 物標検出装置 | |
| US11294029B2 (en) | Radar system and method for updating waveform parameters | |
| JP2016057066A (ja) | 判定装置、走行レーン判定方法、及び、走行レーン判定プログラム | |
| CN108072873B (zh) | 车用物体传感系统及车用物体传感方法 | |
| US9429648B2 (en) | Radar apparatus and computer-readable storage medium | |
| JP4314262B2 (ja) | 車載用レーダ装置 | |
| JPH10253750A (ja) | Fm−cwレーダ装置 | |
| KR101651644B1 (ko) | 복수 차선의 속도 검출 시스템 및 이를 이용한 복수 차선의 속도 검출 방법 | |
| KR20180068600A (ko) | 모션센서 기반의 이동체 감지 및 속도측정시스템 | |
| KR20160015749A (ko) | 시분할 방식의 초음파 센서 및 그 동작 방법 | |
| KR100940577B1 (ko) | 진폭변조 레이더 및 그 거리 측정 방법 | |
| JP2010038832A (ja) | パルスレーダ装置 | |
| JPH0145593B2 (ko) | ||
| KR101738350B1 (ko) | 차량용 항법 장치 및 방법 | |
| JP2019045365A (ja) | レーダ装置 | |
| EP4012444A1 (en) | Radar apparatus | |
| KR100643939B1 (ko) | 레이더 장치 및 레이더의 거리측정 방법 | |
| JP6168913B2 (ja) | レーダ装置 | |
| JP2013217853A (ja) | レーダ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant |