KR20160057425A - Gnss에서의 신호 추적 및 디코딩 - Google Patents
Gnss에서의 신호 추적 및 디코딩 Download PDFInfo
- Publication number
- KR20160057425A KR20160057425A KR1020167009545A KR20167009545A KR20160057425A KR 20160057425 A KR20160057425 A KR 20160057425A KR 1020167009545 A KR1020167009545 A KR 1020167009545A KR 20167009545 A KR20167009545 A KR 20167009545A KR 20160057425 A KR20160057425 A KR 20160057425A
- Authority
- KR
- South Korea
- Prior art keywords
- sub
- frame
- preamble
- decoded
- polarity
- Prior art date
Links
Images




Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B7/00—Radio transmission systems, i.e. using radiation field
- H04B7/14—Relay systems
- H04B7/15—Active relay systems
- H04B7/185—Space-based or airborne stations; Stations for satellite systems
- H04B7/1851—Systems using a satellite or space-based relay
- H04B7/18513—Transmission in a satellite or space-based system
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/24—Acquisition or tracking or demodulation of signals transmitted by the system
- G01S19/243—Demodulation of navigation message
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B7/00—Radio transmission systems, i.e. using radiation field
- H04B7/14—Relay systems
- H04B7/15—Active relay systems
- H04B7/185—Space-based or airborne stations; Stations for satellite systems
- H04B7/18578—Satellite systems for providing broadband data service to individual earth stations
- H04B7/18582—Arrangements for data linking, i.e. for data framing, for error recovery, for multiple access
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Signal Processing (AREA)
- Aviation & Aerospace Engineering (AREA)
- Astronomy & Astrophysics (AREA)
- Radio Relay Systems (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Detection And Prevention Of Errors In Transmission (AREA)
- Synchronisation In Digital Transmission Systems (AREA)
Abstract
GNSS에서 신호 추적 및 디코딩하기 위한 방법, 컴퓨터 프로그램 물건 및 장치가 개시된다. 하나의 예시적 구현에서, 위성 수신기는 위성 신호의 제 1 서브-프레임을 수신하도록 구성될 수 있다. 그것은 제 2 서브-프레임의 프리앰블이 수신될 때까지 제 1 서브-프레임의 유효성의 결정을 연기한다. 위성 수신기는 제 2 서브-프레임의 프리앰블을 수신하고, 그 다음, 제 1 서브-프레임, 및 제 2 서브-프레임의 프리앰블을 사용하여, 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정한다.
Description
[0001]
본 출원은 본원의 양수인에게 양도되는, 2013년 9월 17일자로 출원된 "Signal Tracking and Decoding in GNSS"라는 미국 출원 번호 제14/029,449호에 대한 우선권을 주장한다. 상기 미국 출원은 그에 의해, 그 전체가 인용에 의해 포함된다.
[0002]
본 개시는 무선 통신들의 분야에 관한 것이다. 특히, 본 개시는 GNSS에서의 신호 추적 및 디코딩에 관한 것이다.
[0003]
몇몇 종래의 네비게이션 위성 신호들에서, 파일럿 신호들은 송신되지 않을 수 있다. 이러한 신호들을 복조하기 위해, 수신기는 통상적으로 차동 복조를 이용하여 기준(파일럿) 신호들을 갖지 않는 것에 대한 어려움을 극복한다. 신호들을 복조하도록 수신기를 보조하기 위해, SV(satellite vehicle)는 송신 전에 데이터를 차동으로 인코딩할 필요가 있을 수 있다. 그러나, 몇몇 종래의 위성 시스템들에서, 신호들이 차동으로 인코딩되지 않을 수 있고, 이는 수신기로 하여금 데이터 디코딩 에러들(또한 사이클 슬립들로 지칭됨)이 생기기 쉽게 할 수 있다. 또한, 몇몇 종래의 위성 시스템들에서, 코드 설계에서의 결함들은 수신기로 하여금 데이터 디코딩 에러들에 더 취약하게 할 수 있는데, 그 이유는 서브-프레임(또한 서브프레임으로 지칭됨)에서의 코드워드들 사이에 어떠한 오버랩도 존재하지 않을 수 있기 때문이다. 이러한 코딩의 하나의 예는 BCH (15, 11, 1)이다. 이 코드는, 15개의 비트들의 스트링이 유효 코드워드라면, 0을 1로 대체하고 1을 0으로 대체함으로써 형성되는 그 스트링의 반전(inverse)이 또한 유효 코드워드일 수 있다는 특성을 갖는다. 이 특성은, 데이터 디코딩 에러들의 존재 시, 코드로 하여금 쓸모없게 할 수 있다. 예를 들어, 송신기는 15개의 0들의 시퀀스를 송신한다. 그러나, 코드워드 전에 발생된 사이클 슬립에 기인하여, 수신기는 15개의 1들의 시퀀스로서 스트링을 복조할 수 있다. BCH 코드의 특성으로 인하여, 15개의 1들은 또한 유효 코드워드일 수 있다. 사이클 슬립이 2개의 코드워드들 사이의 경계들에서 발생하면, 수신기는 단지 BCH 코드에만 의존함으로써 워드가 에러가 있는 것을 검출할 수 없을 것이고, 수신기는 유효 코드워드로서 15개의 1들을 수용할 수 있다. 이 문제는, 이페머리스(ephemeris)/알마낙(almanac)이 손상(corrupt)될 수 있기 때문에 큰 아웃라이어(outlier)들을 초래할 수 있다.
[0004]
따라서, 종래의 위성 시스템들의 상기 문제들을 처리할 수 있는 방법, 디바이스, 컴퓨터 프로그램 물건 및 장치에 대한 필요성이 존재한다.
[0005]
본 개시는 GNSS에서의 신호 추적 및 디코딩에 관한 것이다. 본 개시의 실시예들에 따라, 위성 신호의 연속적 서브-프레임들 사이에서 신호 추적 및 디코딩하는 방법은, 제 1 서브-프레임을 수신하는 단계, 제 2 서브-프레임의 프리앰블이 수신될 때까지 제 1 서브-프레임의 유효성의 결정을 연기하는 단계, 제 2 서브-프레임의 프리앰블을 수신하는 단계, 및 제 1 서브-프레임, 및 제 2 서브-프레임의 프리앰블을 사용하여, 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하는 단계를 포함할 수 있다.
[0006]
또 다른 실시예에서, GNSS 수신기는 무선 트랜시버 및 신호 디코딩 모듈을 포함한다. 무선 트랜시버는 제 1 서브-프레임을 수신하도록 구성되는 로직을 포함하고, 신호 디코딩 모듈은 제 2 서브-프레임의 프리앰블이 수신될 때까지 제 1 서브-프레임의 유효성의 결정을 연기하도록 구성되는 로직을 포함하고, 무선 트랜시버는 제 2 서브-프레임의 프리앰블을 수신하도록 구성되는 로직을 포함하고, 신호 디코딩 모듈은 제 1 서브-프레임, 및 제 2 서브-프레임의 프리앰블을 사용하여, 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하도록 구성되는 로직을 포함한다.
[0007]
또 다른 실시예에서, 하나 또는 그 초과의 컴퓨터 시스템들에 의해 실행하기 위한 명령들을 저장하는 비-일시적 매체로서, 명령들은, 제 1 서브-프레임을 수신하기 위한 명령들, 제 2 서브-프레임의 프리앰블이 수신될 때까지 제 1 서브-프레임의 유효성의 결정을 연기하기 위한 명령들, 제 2 서브-프레임의 프리앰블을 수신하기 위한 명령들, 및 제 1 서브-프레임, 및 제 2 서브-프레임의 프리앰블을 사용하여, 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하기 위한 명령들을 포함한다.
[0008]
또 다른 실시예에서, 장치는, 제 1 서브-프레임을 수신하기 위한 수단, 제 2 서브-프레임의 프리앰블이 수신될 때까지 제 1 서브-프레임의 유효성의 결정을 연기하기 위한 수단, 제 2 서브-프레임의 프리앰블을 수신하기 위한 수단 및 제 1 서브-프레임, 및 제 2 서브-프레임의 프리앰블을 사용하여, 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하기 위한 수단을 포함한다.
[0009]
본 개시의 전술된 특징들 및 이점들뿐만 아니라, 본 개시의 추가 특징들 및 이점들은 다음의 도면들의 비-제한적 및 비-총망라적(non-exhaustive) 양상들과 함께 본 개시의 실시예들의 상세한 설명들을 읽은 이후에 더 명료하게 이해가능해질 것이다. 동일한 번호들이 도면들 전반에 걸쳐 사용된다.
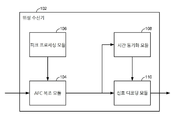
[0010] 도 1은 본 개시의 몇몇 양상들에 따른 위성 수신기의 예시적 블록도를 예시한다.
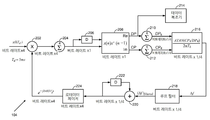
[0011] 도 2는 본 개시의 몇몇 양상들에 따른, 도 1의 AFC 복조 모듈의 예시적 구현을 예시한다.
[0012] 도 3은 본 개시의 몇몇 양상들에 따른, 도 1의 시간 동기화 모듈의 예시적 구현을 예시한다.
[0013] 도 4는 본 개시의 몇몇 양상들에 따른, 도 1의 위성 수신기에 대한 워드 에러 레이트 대 캐리어_대_잡음 비의 도면을 예시한다.
[0014] 도 5는 본 개시의 몇몇 양상들에 따른, 도 1의 신호 디코딩 모듈에 의해 수행되는 예시적 논리 동작들의 흐름도를 예시한다.
[0015] 도 6은 본 개시의 몇몇 양상들에 따른, 데이터 디코딩 에러를 결정하기 위한 예시적 논리 동작들의 흐름도를 예시한다.
[0016] 도 7은 본 개시의 양상들에 따른 디바이스의 예시적 블록도를 예시한다.
[0010] 도 1은 본 개시의 몇몇 양상들에 따른 위성 수신기의 예시적 블록도를 예시한다.
[0011] 도 2는 본 개시의 몇몇 양상들에 따른, 도 1의 AFC 복조 모듈의 예시적 구현을 예시한다.
[0012] 도 3은 본 개시의 몇몇 양상들에 따른, 도 1의 시간 동기화 모듈의 예시적 구현을 예시한다.
[0013] 도 4는 본 개시의 몇몇 양상들에 따른, 도 1의 위성 수신기에 대한 워드 에러 레이트 대 캐리어_대_잡음 비의 도면을 예시한다.
[0014] 도 5는 본 개시의 몇몇 양상들에 따른, 도 1의 신호 디코딩 모듈에 의해 수행되는 예시적 논리 동작들의 흐름도를 예시한다.
[0015] 도 6은 본 개시의 몇몇 양상들에 따른, 데이터 디코딩 에러를 결정하기 위한 예시적 논리 동작들의 흐름도를 예시한다.
[0016] 도 7은 본 개시의 양상들에 따른 디바이스의 예시적 블록도를 예시한다.
[0017]
GNSS에서의 신호 추적 및 디코딩을 위한 방법, 디바이스, 컴퓨터 프로그램 물건 및 장치의 실시예들이 개시된다. 다음의 설명들은 임의의 당업자가 본 개시를 실시 및 사용할 수 있도록 제시된다. 특정 실시예들 및 애플리케이션들의 설명들은 단지 예들로서 제공된다. 본원에 설명되는 예들의 다양한 수정들 및 결합들은 당업자들에게 쉽게 명백할 것이고, 본원에서 정의되는 일반적 원리들은 본 개시의 범위를 벗어나지 않으면서 다른 예들 및 응용들에 적용될 수 있다. 따라서, 본 개시는 설명되고 도시되는 예들에 제한되는 것으로 의도되는 것이 아니라, 본원에 개시되는 원리들 및 특징들과 일치하는 범위에 따를 것이다. "예시적" 또는 "예"라는 단어는 "예, 예시 또는 예증으로서 제공되는"의 의미로 본원에서 사용된다. "예시적"으로서 또는 "예"로서 본원에 설명되는 임의의 양상 또는 실시예는 반드시 다른 양상들 또는 실시예들보다 선호되거나 또는 유리한 것으로 해석되는 것은 아니다.
[0018]
도 1은 본 개시의 몇몇 양상들에 따른 위성 수신기의 예시적 블록도를 예시한다. 도 1에 도시된 바와 같이, 위성 수신기(102)는 AFC(automatic frequency control) 복조 모듈(104), 피크 프로세싱 모듈(106), 시간 동기화 모듈(108) 및 신호 디코딩 모듈(110)을 포함할 수 있다. 본 개시의 양상들에 따라, 위성 수신기(102)는 다른 모듈들 및 논리 블록들을 포함할 수 있고, 이들은 도 7과 관련하여 아래에서 추가로 설명된다.
[0019]
본 개시의 양상에 따라, 피크 프로세싱 모듈(106)은 캐리어_대_잡음 비(C/No.) 추정, 펄스 시간 및 주파수 추정 및 임계 비교를 포함하는(그러나, 이들에 제한되지 않음) 피크 프로세싱을 수행하도록 구성될 수 있다. 하나의 특정 구현에서, 피크 프로세싱 모듈(106)은 유효 피크를 탐색하도록 구성될 수 있다. 탐색 주파수는 동적으로 조정될 수 있다. 피크 프로세싱 모듈(106)은 예측식 중심 주파수 접근법을 사용하여 주파수 드리프트에 기인한 손실을 감소시킬 수 있다. 이전 탐색으로부터의 주파수 추정은 다음 세컨드(second)의 중간으로 전파될 수 있다. 그 다음, 피크 프로세싱 모듈(106)은, 그 후, 전파된 주파수를 사용하여 다음 세컨드의 탐색을 재중심화(re-center)할 수 있다. 이 접근법은 주파수가 대략 일정한 레이트에서 드리프트하지 않는 정상-상태 경우들에서 이로울 수 있다. 완료 시, 피크 프로세싱 모듈(106)은 에너지 그리드가 피크 프로세싱을 위해 더 이상 요구되지 않을 수 있음을 시그널링하는 완료 표시를 채널 제어기에 전송할 수 있다. 또한, 피크 프로세싱 모듈(106)은 또한, 유도된 피크 정보를 측정 제어기(도시되지 않음)에 전송하도록 구성될 수 있다. 측정 제어기(MC)는 피크의 세너티 검사(sanity check)들을 수행하기 위해 추가 프로세싱을 적용시킬 수 있다. 예를 들어, 낮은 신호-대-잡음 비들에서, MC는 측정된 피크 및 예상된 피크 위치들이 일치함(congruent)을 검사하도록 구성될 수 있다. 특정 구현들에서, API(application program interface)는 다수의 피크 보고를 지원하도록 구성될 수 있다. 몇몇 상황들에서, 피크가 무효한 것으로 간주되면, MC는 더 이상의 추가 동작을 취하지 않을 수 있다. 이 접근법은, 채널 제어기(CC)가, 제공되는 초기 세팅들을 사용하여 통합을 계속하게 허용할 수 있다.
[0020]
본 개시의 양상들에 따라, 위성 수신기(102)는, 수신된 위성 신호의 비트 에러 레이트(BER) 및 미검출된 비트 에러 레이트(UBER), 수신된 워드(30-비트)의 워드 에러 레이트(WER), 수신된 워드의 미검출된 워드 에러 레이트(UWER), 수신된 워드의 정규화된 미검출된 워드 에러 레이트(NUWER)를 포함하는(그러나, 이들에 제한되는 것은 아님) 다수의 성능 메트릭들을 평가하도록 구성될 수 있고, 여기서, NUWER은, 수신된 워드가 그것이 패리티 검사를 통과한 경우 에러를 포함할 수 있는 확률(예를 들어, NUWER=UWER/(1-WER))을 표현할 수 있다.
[0021]
본 개시의 몇몇 양상들에 따라, 위성 수신기(102)는 180-도 위상 플립을 검출하도록 구성될 수 있다. 몇몇 종래의 위성 시스템들에서, 각각의 서브프레임(매 6초)당 11-비트 프리앰블이 존재할 수 있고, 여기서, 프리앰블 시퀀스의 하나의 예는  일 수 있다. 프리앰블의 극성은 180-도 위상 플립에 의해 야기되는 수신된 비트들 및 워드들에 대한 오경보 레이트를 추가로 감소시키는데 사용될 수 있다. 다음의 의사 코드는 180-도 위상 플립을 검출하기 위한 예시적 접근법을 나타낸다:
일 수 있다. 프리앰블의 극성은 180-도 위상 플립에 의해 야기되는 수신된 비트들 및 워드들에 대한 오경보 레이트를 추가로 감소시키는데 사용될 수 있다. 다음의 의사 코드는 180-도 위상 플립을 검출하기 위한 예시적 접근법을 나타낸다:


[0022]
도 2를 참조하면, 도 2는 본 개시의 몇몇 양상들에 따른, 도 1의 AFC 복조 모듈(104)의 예시적 구현을 예시한다. 도 2에 도시된 예에서, AFC 복조 모듈(104)은 멀티플라이어(multiplier)(202), 어큐뮬레이터(accumulator)(204), 딜레이(delay)(206), DP_CP 제너레이터(generator)(208), 어큐뮬레이터(210), 어큐뮬레이터(212), 데이터 검출(214), ATAN 디스크리미네이터(discriminator)(216), 루프 필터(218), 가산기(adder)(220), 딜레이(222) 및 로테이터 페이저(rotator phasor)(224)를 포함한다. 본 개시의 양상들에 따라, AFC 루프는 원형 버퍼에 수집될 수 있는 5 밀리초(ms) 코히런트 합들에 대한 오프라인을 연산하도록 구성될 수 있다. AFC 루프 및 데이터 복조는 데이터 복조를 위해 사용될 수 있는 5 ms 코히런트 합들에서 잔류 주파수 에러를 추적 및 조정(디-로테이팅)하도록 구성될 수 있다. 다른 구현들에서, 2-차 AFC 루프(도시되지 않음)는 위성 수신기(102) 내의 AFC 복조 모듈(104)에서 채택될 수 있다. 1-차 루프 대신에 2-차 AFC 루프를 사용하는 것에 대한 이유들 중 하나는 2-차 AFC 루프에서 주파수 램프의 존재 시 동적 응력(정상-상태 주파수 에러)을 0으로 감소시키는 것일 수 있으며, 이는 복조 감도의 개선을 초래할 수 있다. 2-차 AFC 루프에서의 0 동적 응력은 또한, 탐색기 주파수 델타(searcher frequency delta)가 AFC 루프에 적용될 때 교란(disturbance)을 감소시키는데 사용될 수 있다.
[0023]
이제, 도 3을 참조하면, 도 3은 본 개시의 몇몇 양상들에 따른, 도 1의 시간 동기화 모듈(108)의 예시적 구현을 예시한다. 이 예에서, 각각의 서브프레임에서의 제 1 워드(30-비트)는 "프리앰블 워드"로 지칭될 수 있고; 각각의 서브프레임에서의 제 2 워드(30-비트)는 "SOW 워드(second-of-week word)"로 지칭될 수 있다. 도 3에 도시된 바와 같이, 시간 동기화 모듈(108)의 상태 도면은 상태들: INIT(302), 제 1 프리앰블 탐색(304), 제 1 SOW 검증(306), 제 1 서브프레임 수집(308), 제 2 프리앰블(310), 제 2 SOW(312) 및 프레임 포착(314)을 포함할 수 있다. 상이한 상태들 사이의 트랜지션들에 대한 조건들은 도 3에 도시되며, 다음의 섹션들에서 추가로 설명된다.
[0024]
몇몇 예시적 구현들에서, 패리티 검사들은 이러한 워드들이 유효 워드들로서 수용되기 전에 워드들에 대해 수행될 수 있다. 몇몇 접근법들에서, 워드를 정확한 워드로서 수용하기 전에 다음의 테스트들이 워드의 프리앰블에 대해 수행될 수 있다: 1) 그 서브프레임 ID(비트들 16, 17, 18)를 검사하고, 그 ID가 1과 5 사이에 있음을 확인하고, 2) 비트들 1, 2, ..., 11이  또는
또는  와 매칭하는지 여부를 검사하고; 프리앰블 워드의 극성이 180-도 반전되면, 30-비트 프리앰블 워드가 모든 30개의 비트들에 대해 반전되는 극성을 가질 수 있다는 점이 주목되고; 그리고 3) 프리앰블 워드의 두 번째 15개의 비트들의 패리티 검사를 수행하고; 패리티 검사는 SOW 정보의 정확성을 보장하기 위해 수행될 수 있다는 점이 주목된다.
와 매칭하는지 여부를 검사하고; 프리앰블 워드의 극성이 180-도 반전되면, 30-비트 프리앰블 워드가 모든 30개의 비트들에 대해 반전되는 극성을 가질 수 있다는 점이 주목되고; 그리고 3) 프리앰블 워드의 두 번째 15개의 비트들의 패리티 검사를 수행하고; 패리티 검사는 SOW 정보의 정확성을 보장하기 위해 수행될 수 있다는 점이 주목된다.
[0025]
몇몇 다른 예시적 구현들에서, 워드를 정확한 워드로서 수용하기 전에 다음의 테스트들이 SOW 워드에 대해 수행될 수 있다:
a)
SOW 정보(프리앰블 워드에서의 비트들 19 내지 26 그리고 SOW 워드에서의 비트들 1 내지 12)를 획득하고, SOW로부터 서브프레임 ID를 획득한다. 그 다음, 실제 서브프레임 ID를 SOW로부터 추론된 서브프레임 ID와 비교한다.
D1 신호에 대해: SOW로부터 추론된 서브프레임 ID는:  일 수 있다.
일 수 있다.
예를 들어, 현재 SOW가 42초이면, (SOW % 30)은 42/30의 나머지 = 12를 제공하고; 그리고  이고; 이 방식에서, 추론된 서브프레임 ID = 2 + 1 = 3이다.
이고; 이 방식에서, 추론된 서브프레임 ID = 2 + 1 = 3이다.
b)
서브프레임 ID = 1(제 1 서브프레임)이면, 헬스 플래그(health flag)(SOW 워드의 비트 13)를 검사한다. 경보 플래그가 어서트되면(예를 들어, '1'), SOW를 폐기하고; 서브프레임 ID ~=1이면, 이 검사를 바이패싱한다.
c)
위크 세컨드(week second) 범위 내에 있을 수 있는, 20-비트 SOW 정보의 범위를 검사한다.
d)
공지된 로컬 시간에 따라 20-비트 SOW 정보를 검사한다.
e)
패리티 검사를 수행한다.
[0026]
몇몇 다른 구현들에서, 위크 넘버(week number)는 다음의 접근법에 기초하여 수용될 수 있다. 위크 넘버는 서브프레임 1로부터의 워드 3일 수 있고, SV 헬스는 서브프레임 1로부터의 워드 2일 수 있다. 위크 넘버를 수용하기 위해 패리티가 통과될 수 있다.
[0027]
몇몇 경우들에서, 잘못된 위크 넘버를 디코딩하는 것은 다른 문제들을 초래할 수 있다. 추가된 보호를 제공하기 위해, SOW 전에 패리티 검사 및 세너티 검사들을 통과하는 것이 바람직하다. 비트 동기화가 손실되면, 위크 넘버가 이미 존재하는 경우 심지어 3개의 검사들 중 최적의 2개가 충분하지 않을 수 있는데, 그 이유는 워드 3이 추적되는 하나 초과의 SV에 대해 정확하게 동일한 데이터를 가질 가능성이 있을 수 있기 때문이다. 이러한 추가된 검사들은 디코딩 능력에서의 작은 손실을 발생시킬 수 있지만, 이들은 잘못된 위크 넘버들을 디코딩하기 위해 보호를 크게 증가시킬 수 있다. 결과적으로, 제 1 서브프레임에 대해 패리티 에러가 없는(free) 것이 바람직하다. 또한, 품질 신호들이 SV로부터 수신되게 하고(워드 2의 비트 13이 '0'이 됨), SOW 워드 세너티 체크가 통과되게 하는 것이 바람직하다.
[0028]
하나의 예시적 구현에서, 어떠한 위크 넘버도 존재하지 않는다면, 새로운 위크 넘버가 수용될 수 있다. 대안적으로 또는 추가적으로, 디코딩된 마지막 2개의 위크 넘버들이 저장될 수 있다. 새로운 위크 넘버는 마지막 3개의 디코드들 중 적어도 2개에서 매칭을 갖는 것을 선택함으로써 확인 및 수용될 수 있다. EOW(end-of-a-week) 이벤트 직후 특별한 2시간 존에 있는 동안 특수 검사가 포함될 수 있다. 특수 검사가 실패하면, 디코딩된 위크는 진부(stale)할 수 있다. 그 경우, 디코딩된 위크 파이프라인은 업데이트되지 않을 수 있다.
[0029]
하나의 예시적 구현에서, 특수 검사는 EOW에서 수행될 수 있다. EOW 이후, 이미 위크 넘버가 존재하는 경우, 그것이 이전 위크(현재 위크 - 1)가 아닌 경우에만 새로운 위크 넘버가 수용될 수 있다. 다시 말해서, DBIT(data bit)들로부터의 진부한 데이터를 디코딩하는 것 ― 예를 들어, 디코딩 로직이 딜레이될 수 있거나, 또는 제어 세그먼트가 몇몇 상황들에서 위크 넘버를 업데이트하지 않음 ― 으로부터 보호하는 것이 바람직하다.
[0030]
그것이 위크의 첫 번째 2-시간 윈도우 내에 있고, 이전 디코드가 이전 위크로부터의 것이라면, (현재 위크에 더 이상의 위크 디코드의 이력이 존재하지 않기 때문에) 새로운 위크가 수용될 수 있다. 그러나, 현재 위크로부터의 이전 디코드가 존재하면, 이전 2개의 위크 디코드들이 저장될 수 있고, 새로운 위크 넘버는 그것이 적어도 하나의 다른 디코드와 매칭하는 경우에 수용될 수 있다.
[0031]
하나의 예시적 구현에서, 임의의 데이터 디코딩 에러가 서브프레임 내에서 검출되면, 모든 10개의 워드들은 낮은 신뢰성을 갖는 것으로 마킹될 수 있다. 그러나, 이페머리스가 이용가능하지 않다면, 워드 내의 최대 미리 결정된 수의 데이터 디코딩 에러들(예를 들어, 1, 2 등)은 낮은 신뢰성을 갖는 것으로 워드들을 마킹하기 전에 수용될 수 있다.
[0032]
몇몇 상황들에서, 수신기는 잘못된 시간-세팅 또는 부정확한 비트-에지 세팅의 많은 경우들을 가질 수 있다. 프레임 동기화가 부정확하게 세팅된다면, 데이터 비트들을 정확하게(즉, 데이터 디코딩 에러 없이) 디코딩할 확률이 존재할 수 있지만, 패리티 검사는 실패할 수 있는데, 그 이유는 워드들이 부정확하게 구성될 수 있기 때문이다. 이 상황으로부터 복원하기 위해, 새로운 검사가 추가될 수 있다. 하나의 접근법에서, 전체 서브프레임에 데이터 디코딩 에러들이 존재하지 않지만, 6개 초과의 워드들이 패리티 에러들을 갖는다면, 타이밍/프레임-동기화 에러가 선언될 수 있다. 이러한 경우, 모든 클럭 정보 및 측정들을 삭제하고 재시작하는 것이 바람직하다.
[0033]
본 개시의 양상들에 따라, 타이밍 에러는 다음의 조건들 중 하나에서 선언될 수 있고, 조건들은 다음을 포함하지만, 이들에 제한되는 것은 아니다:
(1)
임의의 사이클 슬립들이 마지막 30개의 비트들에서 관측되면, 관측된 사이클 슬립들의 수에 기초하여, UltraConfidence 비트는 서브프레임에서의 모든 10개의 워드들에 대해 세팅될 수 있고; 이는 에러 검사를 위해 사용될 수 있다.
(2)
또한, w_ConfidenceLow 비트는 모든 10개의 워드들에 대해 "0"으로 세팅될 수 있다. 보통, (UltraConfidence가 적절하게 컴퓨팅되지 않을 수 있는 경우) 이것은 리던던트 검사이다.
(3)
서브프레임에서, 워드들의 수의 미리 결정된 퍼센티지(예를 들어, 10%, 30%, 50% 등) 초과는 패리티 검사를 실패한다.
(4)
가정된 서브프레임 경계를 갖는 프리앰블은 미리 결정된 프리앰블, 예를 들어,  또는 그것의 반전된 버전
또는 그것의 반전된 버전  에 매칭하지 않는다.
에 매칭하지 않는다.
(5)
SV는 사용가능하다.
[0034]
DBIT 상태 머신이 이미 시작되었으면, 데이터-비트들은 연속적인 것으로 간주될 수 있다. 데이터-비트들에 갭들이 존재하면, DBIT 상태 머신은 리셋될 수 있는데, 그 이유는 어떤 비트들이 손실될 수 있는지가 알려지지 않을 수 있기 때문이다.
[0035]
도 3을 참조하면, INIT(302) 상태에서, 시간 동기화 모듈(108)은 위성 수신기(102) 내의 버퍼들을 초기화하도록 구성될 수 있다. 수신기가 INIT 상태에 있고, SV 시간이 이미 몇몇 다른 수단, 이를테면, SV 차이 또는 포지션 엔진으로부터의 입력 등에 의해 세팅되었다면, 데이터-비트 디코딩 변수들, 비트 카운트 및 워드 카운트는 직접적으로 파퓰레이팅(populate)될 수 있다.
[0036]
제 1 프리앰블 탐색(304) 상태에서, 시간 동기화 모듈(108)은 비트별로(bit-by-bit) 수집하고, 가장 최근 30개의 비트들이 유효 프리앰블을 가지고 프리앰블 워드가 패리티 검사를 통과할 때까지 이 모드에 머무르도록 구성될 수 있다. 본 개시의 양상들에 따라, 프리앰블이 발견되고 패리티 검사가 통과하면, 상태 머신은 제 1 SOW 검증(306)의 다음 상태로 이동할 수 있다. 그렇지 않으면, 그것은 현재 상태에 머무를 수 있다.
[0037]
제 1 SOW 검증(306) 상태에서, 시간 동기화 모듈(108)은 다음의 예시적 의사 코드들을 사용하여 제 1 SOW를 검사한다:

[0038]
제 1 서브프레임 수집(308) 상태에서, 시간 동기화 모듈(108)은 10개의 워드들을 수집하도록 구성될 수 있고, 그 다음, 그것은 제 2 프리앰블(310) 상태로 이동할 수 있다. 제 2 프리앰블(310) 상태에서, 시간 동기화 모듈(108)은 다음의 예시적 의사 코드들을 사용하여 제 2 프리앰블을 검사하도록 구성될 수 있다:

[0039]
제 2 SOW(312) 상태에서, 시간 동기화 모듈(108)은 다음의 예시적 의사 코드들을 사용하여 제 2 SOW를 검사하도록 구성될 수 있다:

[0040]
프레임 포착(314) 상태에서, 시간 동기화 모듈(108)은 다음의 예시적 의사 코드들을 사용하여 워드 검사가 통과되도록 보장하도록 구성될 수 있다:

[0041]
도 4는 본 개시의 몇몇 양상들에 따른, 도 1의 위성 수신기(102)에 대한 워드 에러 레이트 대 캐리어_대_잡음 비의 도면을 예시한다. 도 4에 도시된 예에서, 수직 축은 WER(word error rate)을 표현하고, 수평 축은 0 Hz/s의 동작 주파수 레이트에서, dB 단위로 측정되는 캐리어_대_잡음 비(C/No.)를 표현한다. 하나의 접근법에서, 어떠한 워드도 폐기되지 않는다고 가정한다면, 수신된 위성 신호의 비트 에러 레이트는 수신된 비트들에 기초하여 결정될 수 있다. 복조 방식들(코스타스(Costas) 대 AFC)의 비트 에러 레이트 성능을 평가하기 위해, 워드/서브프레임 레벨 오경보 보호가 디스에이블될 수 있다. 코스타스 루프가 낮은 SNR 영역에서 데이터 디코딩 에러들을 겪을 수 있다는 점이 주목된다. 서브-프레임 레벨 위상 정정은 이 문제를 해결하는데 사용될 수 있다. 몇몇 상황들에서, AFC는 낮은 SNR 영역에서 비트 에러 전파를 겪을 수 있다.
[0042]
또 다른 접근법에서, 수신된 위성 신호의 워드 에러 레이트는 다음의 규칙들에 기초하여 유도될 수 있지만 이 규칙들에 제한되는 것은 아니다: 1) 서브프레임에서의 BCH 메시지들(서브프레임당 19개의 BCH 메시지들) 중 임의의 하나가 패리티 검사를 실패하는 경우 하나의 서브프레임에서의 모든 10개의 워드들이 에러가 있고; 2) 서브프레임의 11-비트 프리앰블이  또는
또는  의 정확한 매칭이 아니면, 하나의 서브프레임에서의 모든 10개의 워드들은 에러가 있는 것으로 간주될 수 있고; 그리고 3) 복조된 워드에서의 임의의 비트가 송신된 워드와 상이하면, 복조된 워드는 에러가 있는 것으로 간주될 수 있다.
의 정확한 매칭이 아니면, 하나의 서브프레임에서의 모든 10개의 워드들은 에러가 있는 것으로 간주될 수 있고; 그리고 3) 복조된 워드에서의 임의의 비트가 송신된 워드와 상이하면, 복조된 워드는 에러가 있는 것으로 간주될 수 있다.
[0043]
또 다른 접근법에서, 수신된 위성 신호에서의 미검출된 비트 에러 레이트(UBER)는, 수용된 BCH 메시지에서의 비트가 송신된 비트와 상이하면, 이 비트는 미검출된 비트 에러로서 마킹될 수 있다는 규칙에 기초하여 유도될 수 있다. 또 다른 접근법에서, 수신된 위성 신호에서의 미검출된 워드 에러 레이트(UWER)는, 워드가 BCH 패리티 검사를 통과하지만 송신된 워드와 상이하면, 이 워드는 미검출된 워드 에러로서 마킹될 수 있다는 규칙에 기초하여 유도될 수 있다.
[0044]
본 개시의 양상들에 따라, 코스타스 루프 기반 복조 방식에 있어서, C/No. 값들에 대한 1e-4 미만의 UBER는 21 dB-Hz와 35 dB-Hz 사이이며, 26 dB-Hz보다 큰 C/No. 값들에 대한 1e-6 미만의 오경보 비트 레이트를 보장할 수 있다. AFC 기반 복조 방식에 있어서, C/No. 값들에 대한 1e-3 미만의 UWER는 21 dB-Hz와 35 dB-Hz 사이이며, 25 dB-Hz보다 큰 C/No. 값들에 대한 1e-4 미만의 오경보 워드 레이트를 보장할 수 있다. 코스타스 루프 대 AFC 루프의 예시적 성능은 다음과 같이 요약될 수 있다:

[0045]
AFC와 비교하여, 주파수 레이트가 12 Hz 미만(<12 Hz/s)일 수 있는 경우, 코스타스는 더 양호한 감도(~1 dB @ 1%WER)를 갖는다는 점이 주목된다. 몇몇 상황들에서, 코스타스는, 예를 들어, 12 Hz/s 초과의 높은 주파수 레이트에서 동작하지 않을 수 있다.
[0046]
본 개시의 양상들에 따라, 서브-프레임을 디코딩하는 경우, 위성 수신기(102)는 다음 서브-프레임의 프리앰블의 모든 비트들이 수신될 때까지 그것의 판정을 연기할 수 있다. 첫 번째, 서브-프레임에서의 20개의 BCH 코드워드들 중 임의의 것이 패리티 검사를 실패하면, 위성 수신기(102)는 서브-프레임에서의 모든 디코딩된 데이터를 폐기할 수 있다. 이 패리티 검사는 위성 수신기(102)가 서브-프레임의 각각의 워드에서 발생할 수 있는 데이터 디코딩 에러들을 회피하는 것을 도울 수 있다. 두 번째, 위성 수신기(102)는 다음 서브-프레임의 프리앰블에 대해 현재 서브-프레임의 극성을 검사할 수 있다. 2개의 프리앰블들의 극성들이 동일하다면, 위성 수신기(102)는 단지 서브-프레임에서의 워드들을 수용할 수 있다. 이 극성 검사는 유용할 수 있는데, 그 이유는 그것은 워드들의 경계에서 서브-프레임에 발생할 수 있는 홀수의 데이터 디코딩 에러들을 제거하도록 도울 수 있기 때문이다. 세 번째, 위성 수신기(102)는 서브-프레임에서의 비트들(예를 들어, 서브-프레임 ID, SOW, 헬스 비트들 등) 중 몇몇을 예측하도록 구성될 수 있다. 그것은 이 비트들을 사용하여, 디코딩된 데이터에 대해 일관성 검사들을 수행할 수 있다. 디코딩된 비트와 예측된 비트 사이에 미스매칭이 존재하면, 서브-프레임에서의 모든 데이터는 폐기될 수 있다. 네 번째, 낮은 캐리어-대-잡음 비(C/No)를 갖는 SV로부터의 이페머리스는 데이터 디코딩 에러들에 의해 잠재적으로 손상될 수 있기 때문에, 포지션 솔루션을 형성하는 경우, 하나의 예시적 구현에서, 미리 결정된 C/No. 임계치를 갖는 SV(satellite vehicle)가 사용될 수 있다.
[0047]
도 5는 본 개시의 몇몇 양상들에 따른, 도 1의 위성 수신기(102)의 신호 디코딩 모듈(110)에 의해 수행되는 예시적 논리 동작들의 흐름도를 예시한다. 도 5에 도시된 바와 같이, 블록(502)에서, 위성 수신기는 제 1 서브-프레임을 수신하도록 구성될 수 있다. 블록(504)에서, 위성 수신기는 제 2 서브-프레임의 프리앰블이 수신될 때까지 제 1 서브-프레임의 유효성의 결정을 연기하도록 구성될 수 있다. 블록(506)에서, 위성 수신기는 제 2 서브-프레임의 프리앰블을 수신하도록 구성될 수 있다. 블록(508)에서, 위성 수신기는 제 1 서브-프레임, 및 제 2 서브-프레임의 프리앰블을 사용하여, 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하도록 구성될 수 있다. 제 1 서브-프레임 및 제 2 서브-프레임은 위성 신호의 연속적 서브-프레임들일 수 있다는 점이 주목된다.
[0048]
하나의 예시적 구현에서, 제 1 서브-프레임은 프리앰블, 복수의 워드들을 포함한다. 각각의 워드는 하나 또는 그 초과의 인터리빙된 코드워드들을 포함할 수 있다. 또 다른 예시적 구현에서, 각각의 워드는 하나 또는 그 초과의 인터리빙되지 않은 코드워드들을 포함할 수 있다. 또 다른 예시적 구현에서, 각각의 워드는 하나 또는 그 초과의 인터리빙된 그리고 인터리빙되지 않은 코드워드들의 결합을 포함할 수 있다.
[0049]
도 6은 본 개시의 몇몇 양상들에 따른, 도 5의 블록(508)에서 데이터 디코딩 에러를 결정하기 위한 예시적 논리 동작들의 흐름도를 예시한다. 도 6에 도시된 예시적 구현에서, 블록(602)에서, 위성 수신기는, 제 1 서브-프레임의 프리앰블 및 제 1 서브-프레임의 디코딩된 코드워드들을 생성하기 위해 제 1 서브-프레임을 디코딩하고 ― 제 1 서브-프레임의 프리앰블 및 제 1 서브-프레임의 디코딩된 코드워드들은 디코딩된 제 1 서브-프레임을 형성함 ― , 그리고 제 1 서브-프레임의 프리앰블, 제 1 서브-프레임의 디코딩된 코드워드들 및 제 2 서브-프레임의 프리앰블에 적어도 부분적으로 기초하여 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하도록 구성될 수 있다.
[0050]
본 개시의 양상들에 따라, 블록(602)에서 수행되는 논리 동작들은 블록들(604, 606 및 608)에서 수행되는 논리 동작을 더 포함할 수 있다. 블록(604)에서, 위성 수신기는, 제 1 서브-프레임의 디코딩된 코드워드들에 대해 패리티 검사를 수행하고; 패리티 검사가 통과하면 제 1 서브-프레임의 디코딩된 코드워드들을 수용하고; 그리고 패리티 검사가 실패하면 제 1 서브-프레임의 디코딩된 코드워드들을 폐기하도록 구성될 수 있다.
[0051]
블록(606)에서, 위성 수신기는, 제 1 서브-프레임의 프리앰블의 극성 및 제 2 서브-프레임의 프리앰블의 극성을 비교하고; 제 1 서브-프레임의 프리앰블의 극성과 제 2 서브-프레임의 프리앰블의 극성 사이에 매칭이 존재하면 제 1 서브-프레임의 디코딩된 코드워드들을 수용하고; 그리고 제 1 서브-프레임의 프리앰블의 극성과 제 2 서브-프레임의 프리앰블의 극성 사이에 미스매칭이 존재하면 제 1 서브-프레임의 디코딩된 코드워드들을 폐기하도록 구성될 수 있다.
[0052]
블록(606)에서, 위성 수신기는, 예측된 제 1 서브-프레임을 형성하기 위해 제 1 서브-프레임을 예측하고; 예측된 제 1 서브-프레임을 디코딩된 제 1 서브-프레임과 비교하고; 예측된 제 1 서브-프레임과 디코딩된 제 1 서브-프레임 사이에 매칭이 존재하면 디코딩된 제 1 서브-프레임을 수용하고; 그리고 예측된 제 1 서브-프레임과 디코딩된 제 1 서브-프레임 사이에 미스매칭이 존재하면 디코딩된 제 1 서브-프레임을 폐기하도록 구성될 수 있다. 하나의 예시적 구현에서, 제 1 서브-프레임을 예측하는 것은 제 1 서브-프레임의 일부를 예측하는 것을 포함할 수 있고, 예측된 제 1 서브-프레임의 일부는 제 1 서브-프레임을 형성하기 위해 제 1 서브-프레임의 다른 부분들과 결합될 수 있다는 점이 주목된다. 또 다른 예시적 구현에서, 제 1 서브-프레임을 예측하는 것은 전체 제 1 서브-프레임을 예측하는 것을 포함할 수 있고, 예측된 제 1 서브-프레임은 제 1 서브-프레임을 형성할 수 있다는 점이 주목된다.
[0053]
본 개시의 양상들에 따라, 룩-업 테이블을 이용하는 BCH 디코딩 프로시저는 신호 디코딩 모듈(110)을 구현하는데 사용될 수 있다. 하나의 예시적 구현에서, BCH 디코딩 프로시저의 의사 코드는 다음과 같이 나타낸다:

[0054]
또 다른 접근법에서, 해밍(Hamming) 디코딩은 신호 디코딩 모듈(110)을 구현하는데 이용될 수 있다. 예시적 구현들에서, GPS 네비게이션 데이터 구조에서, 비트 레이트는 50 bit/s일 수 있고, 비트 듀레이션은 골드 확산 시퀀스(Gold spreading sequence)의 20개의 기간들과 동등할 수 있다. 비트들은 30-비트 워드들(0.6 초)로 그룹화될 수 있고, 각각의 워드에서의 24개의 정보 비트들 및 6개의 패리티 비트들, 및 대략 6초 지속할 수 있는 각각의 서브프레임에서의 10개의 워드들이 존재할 수 있다. 각각의 서브프레임의 첫 번째 2개의 워드들은 텔레메트리(TLM) 및 핸드오버 워드들(HOW)일 수 있는데, 이는 (서브프레임 동기화를 위해) 위크 시간 및 서브프레임 ID와 같은, 프리앰블 외의 적은 정보를 전달한다. 나머지 8개의 워드들은 알마낙 또는 이페머리스 정보를 전달할 수 있다. 하나의 예시적 구현에서, 대략 30초 지속할 수 있는 각각의 프레임에 5개의 서브프레임들이 존재할 수 있다. 첫 번째 3개의 서브프레임들은, 위성 특정적일 수 있고 매 프레임마다 반복될 수 있는 클럭 및 SV 이페머리스를 포함할 수 있다. 마지막 2개의 서브프레임들은, 모든 위성들에 대해 동일할 수 있는 알마낙 데이터를 포함할 수 있으며, 전체 알마낙을 송신하기 위해 25개의 프레임들(12.5 분)을 요구할 수 있다.
[0055]
각각의 30-비트 워드에서, 확장된 해밍 (32, 26) 블록 코드에 의해 인코딩되는 24개의 정보 비트들 및 6개의 패리티 비트들이 존재할 수 있다. 인코더의 입력은 24개의 정보 비트들  , 이전 워드
, 이전 워드  및
및  의 마지막 2개의 패리티 비트들로 구성될 수 있다. 인코더의 출력에 30개의 비트들
의 마지막 2개의 패리티 비트들로 구성될 수 있다. 인코더의 출력에 30개의 비트들  이 존재할 수 있으며, 여기서,
이 존재할 수 있으며, 여기서,  는 패리티 비트들일 수 있다. 인코딩 식들은 아래와 같이 주어진다:
는 패리티 비트들일 수 있다. 인코딩 식들은 아래와 같이 주어진다:

패리티 식들은 다음과 같이,  대신에,
대신에,  에 관하여 기재될 수 있다:
에 관하여 기재될 수 있다:

[0056]
대응하는 인코더 식들에서의  의 수가 홀수일 수 있기 때문에, 항
의 수가 홀수일 수 있기 때문에, 항  은
은  의 식으로부터 제거되고,
의 식으로부터 제거되고,  의 식에 추가될 수 있다는 점이 주목된다. 패리티 식들은 시스템적 패리티 검사 행렬에 표현될 수 있다. 본 개시의 양상들에 따라, 패리티 행렬의 첫 번째 5개의 행들은 (31, 26) 해밍 코드로부터인 것, 즉, 그것의 열들은 모든 넌-제로 5-튜플들을 포함할 수 있다는 것이 검증될 수 있다. 코드의 최소 해밍 거리는, 단일-에러-정정 코드일 수 있는 3일 수 있다. 확장된 해밍 (32, 26) 코드를 획득하기 위해, 여분의 패리티 검사 비트는 모든-1 행을 패리티 검사 행렬에 추가함으로써 도입될 수 있다. 이 방식에서, 코드워드들의 해밍 가중치는 짝수로 생성될 수 있고, 최소 해밍 거리는 4로 증가될 수 있다. 패리티 행렬을 시스템적 형태로 유지하기 위해, 마지막 행이 주어지면, 첫 번째 5개의 행들은 마지막 행으로부터 차감될 수 있다.
의 식에 추가될 수 있다는 점이 주목된다. 패리티 식들은 시스템적 패리티 검사 행렬에 표현될 수 있다. 본 개시의 양상들에 따라, 패리티 행렬의 첫 번째 5개의 행들은 (31, 26) 해밍 코드로부터인 것, 즉, 그것의 열들은 모든 넌-제로 5-튜플들을 포함할 수 있다는 것이 검증될 수 있다. 코드의 최소 해밍 거리는, 단일-에러-정정 코드일 수 있는 3일 수 있다. 확장된 해밍 (32, 26) 코드를 획득하기 위해, 여분의 패리티 검사 비트는 모든-1 행을 패리티 검사 행렬에 추가함으로써 도입될 수 있다. 이 방식에서, 코드워드들의 해밍 가중치는 짝수로 생성될 수 있고, 최소 해밍 거리는 4로 증가될 수 있다. 패리티 행렬을 시스템적 형태로 유지하기 위해, 마지막 행이 주어지면, 첫 번째 5개의 행들은 마지막 행으로부터 차감될 수 있다.
[0057]
모든-1 벡터가 유효 코드워드일 수 있다는 것이 검증될 수 있다. 따라서, 수신기에 ( 전에) 초기 위상 반전이 존재하면, 패리티 검사는 여전히 통과할 수 있다. 획득된 정보 비트들은 여전히 정확할 수 있는데, 그 이유는 그들이
전에) 초기 위상 반전이 존재하면, 패리티 검사는 여전히 통과할 수 있다. 획득된 정보 비트들은 여전히 정확할 수 있는데, 그 이유는 그들이  의 기준으로 차동 인코딩되기 때문이다. 따라서, 초기 위상 모호성은 복조 시에 해결될 수 있다.
의 기준으로 차동 인코딩되기 때문이다. 따라서, 초기 위상 모호성은 복조 시에 해결될 수 있다.
[0058]
도 7은 본 개시의 양상들에 따른 디바이스의 예시적 블록도를 예시한다. 도 7에 도시된 바와 같이, 위성 수신기(102)(도 1)는 도 7에 도시된 디바이스(700)의 하나 또는 그 초과의 피처들을 포함할 수 있다. 특정 실시예들에서, 디바이스(700)는 또한, 무선 통신 네트워크를 거쳐 무선 안테나(722)를 통해 무선 신호들(723)을 송신 및 수신할 수 있는 무선 트랜시버(721)를 포함할 수 있다. 무선 트랜시버(721)는, 무선 트랜시버 버스 인터페이스(720)에 의해 버스(701)에 연결될 수 있다. 몇몇 실시예들에서, 무선 트랜시버 버스 인터페이스(720)는, 무선 트랜시버(721)와 적어도 부분적으로 통합될 수 있다. 몇몇 실시예들은, 예를 들어, IEEE 표준 802.11의 버전들, CDMA, WCDMA, LTE, UMTS, GSM, AMPS, Zigbee 및 Bluetooth 등과 같은 대응하는 다수의 무선 통신 표준들에 따라 신호들을 송신 및/또는 수신하는 것을 가능하게 하기 위해 다수의 무선 트랜시버들(721) 및 무선 안테나들(722)을 포함할 수 있다.
[0059]
디바이스(700)는 또한, SPS 안테나(758)를 통해 SPS 신호들(759)을 수신 및 포착할 수 있는 SPS 수신기(755)를 포함할 수 있다. SPS 수신기(755)는 또한, 위성 수신기(102)의 위치를 추정하기 위해, 포착된 SPS 신호들(759)을 전체적으로 또는 부분적으로 프로세싱할 수 있다. 몇몇 실시예들에서, 프로세서(들)(711), 메모리(740), DSP(들)(712) 및/또는 특수화된 프로세서들(도시되지 않음)은 또한, 포착된 SPS 신호들을 전체적으로 또는 부분적으로 프로세싱하고, 그리고/또는 SPS 수신기(755)와 함께 디바이스(700)의 추정된 위치를 계산하는데 활용될 수 있다. 포지셔닝 동작들을 수행할 시 사용하기 위한 SPS 또는 다른 신호들의 저장은 메모리(740) 또는 레지스터들(도시되지 않음)에서 수행될 수 있다.
[0060]
또한, 도 7에 도시된 바와 같이, 디바이스(700)는, 버스 인터페이스(710)에 의해 버스(701)에 연결된 DSP(digital signal processor)(들)(712), 버스 인터페이스(710)에 의해 버스(701)에 연결된 프로세서(들)(711) 및 메모리(740)를 포함할 수 있다. 버스 인터페이스(710)는, DSP(들)(712), 프로세서(들)(711) 및 메모리(740)와 통합될 수 있다. 다양한 실시예들에서, 기능들은, 단지 몇 가지만 예를 들자면, 이를테면, RAM, ROM, FLASH, 또는 디스크 드라이브와 같은 컴퓨터 판독가능한 저장 매체 상의 메모리(740)에 저장된 하나 또는 그 초과의 머신 판독가능한 명령들의 응답 실행에서 수행될 수 있다. 하나 또는 그 초과의 명령들은, 프로세서(들)(711), 특수화된 프로세서들, 또는 DSP(들)(712)에 의해 실행가능할 수 있다. 메모리(740)는, 본원에 설명되는 기능들을 수행하도록 프로세서(들)(711) 및/또는 DSP(들)(712)에 의해 실행가능한 소프트웨어 코드(프로그래밍 코드, 명령들 등)를 저장하는 비-일시적 프로세서 판독가능한 메모리 및/또는 컴퓨터 판독가능한 메모리를 포함할 수 있다. 특정 구현에서, 무선 트랜시버(721)는, 디바이스(700)가 위에서 논의된 바와 같이 무선 STA로서 구성될 수 있도록 버스(701)를 통해 프로세서(들)(711) 및/또는 DSP(들)(712)와 통신할 수 있다. 프로세서(들)(711) 및/또는 DSP(들)(712)는, 도 2, 도 3, 도 5 및 도 6과 관련하여 위에서 논의된 프로세스들/논리 동작들의 하나 또는 그 초과의 양상들을 실행하기 위해 명령들을 실행할 수 있다.
[0061]
또한, 도 7에 도시된 바와 같이, 사용자 인터페이스(735)는, 예를 들어, 스피커, 마이크로폰, 디스플레이 디바이스, 진동 디바이스, 키보드, 터치 스크린 등과 같은 몇몇 디바이스들 중 임의의 하나를 포함할 수 있다. 특정 구현에서, 사용자 인터페이스(735)는, 사용자가 디바이스(700) 상에 호스팅된 하나 또는 그 초과의 애플리케이션들과 상호작용하는 것을 가능하게 할 수 있다. 예를 들어, 사용자 인터페이스(735)의 디바이스들은, 사용자로부터의 동작에 대한 응답으로 DSP(들)(712) 또는 프로세서(711)에 의해 추가로 프로세싱될 아날로그 또는 디지털 신호들을 메모리(740) 상에 저장할 수 있다. 유사하게, 디바이스(700) 상에 호스팅된 애플리케이션들은, 출력 신호를 사용자에게 제시하기 위해 아날로그 또는 디지털 신호들을 메모리(740) 상에 저장할 수 있다. 또 다른 구현에서, 디바이스(700)는 선택적으로, 예를 들어, 전용 스피커, 마이크로폰, 디지털-아날로그 회로, 아날로그-디지털 회로, 증폭기들 및/또는 이득 제어부를 포함하는 전용 오디오 입력/출력(I/O) 디바이스(770)를 포함할 수 있다. 또 다른 구현에서, 디바이스(700)는, 키보드 또는 터치 스크린 디바이스 상에서의 터칭 또는 압력에 응답하는 터치 센서들(762)을 포함할 수 있다.
[0062]
디바이스(700)는 또한, 정지 영상 또는 동영상을 캡처하기 위한 전용 카메라 디바이스(764)를 포함할 수 있다. 전용 카메라 디바이스(764)는, 예를 들어, 이미징 센서(예를 들어, 전하 커플링된 디바이스 또는 CMOS 이미저), 렌즈, 아날로그-디지털 회로, 프레임 버퍼들 등을 포함할 수 있다. 하나의 구현에서, 캡처된 이미지들을 표현하는 신호들의 추가 프로세싱, 컨디셔닝, 인코딩 또는 압축은 프로세서(711) 또는 DSP(들)(712)에서 수행될 수 있다. 대안적으로, 전용 비디오 프로세서(768)는, 캡처된 이미지들을 표현하는 신호들의 컨디셔닝, 인코딩, 압축 또는 조작을 수행할 수 있다. 추가적으로, 전용 비디오 프로세서(768)는, 디바이스(700)의 디스플레이 디바이스(도시되지 않음) 상에서의 제시를 위해, 저장된 이미지 데이터를 디코딩/압축해제할 수 있다.
[0063]
디바이스(700)는 또한, 예를 들어, 관성 센서들 및 환경 센서들을 포함할 수 있는, 버스(701)에 커플링된 센서들(760)을 포함할 수 있다. 센서들(760)의 관성 센서들은, 예를 들어, (예를 들어, 3차원으로 디바이스(700)의 가속도에 집합적으로 응답하는) 가속도계들, 하나 또는 그 초과의 자이로스코프들 또는 (예를 들어, 하나 또는 그 초과의 컴패스 애플리케이션들을 지원하기 위한) 하나 또는 그 초과의 자력계들을 포함할 수 있다. 디바이스(700)의 환경 센서들은, 예를 들어, 단지 몇 가지만 예를 들자면, 온도 센서들, 기압 센서들, 주변 광 센서들, 카메라 이미저들 및 마이크로폰들을 포함할 수 있다. 센서들(760)은, 예를 들어, 포지셔닝 또는 네비게이션 동작들에 관련된 애플리케이션들과 같은 하나 또는 그 초과의 애플리케이션들의 지원 시, 메모리(740)에 저장되고 DPS(들) 또는 프로세서(711)에 의해 프로세싱될 수 있는 아날로그 또는 디지털 신호들을 생성할 수 있다.
[0064]
특정 구현에서, 디바이스(700)는, 무선 트랜시버(721) 또는 SPS 수신기(755)에서 수신되어 하향변환되는 신호들의 베이스밴드 프로세싱을 수행할 수 있는 전용 모뎀 프로세서(766)를 포함할 수 있다. 유사하게, 전용 모뎀 프로세서(766)는, 무선 트랜시버(721)에 의한 송신을 위해 상향변환될 신호들의 베이스밴드 프로세싱을 수행할 수 있다. 대안적 구현들에서, 전용 모뎀 프로세서를 갖는 대신에, 베이스밴드 프로세싱은, 프로세서 또는 DSP(예를 들어, 프로세서(711) 또는 DSP(들)(712))에 의해 수행될 수 있다.
[0065]
적어도 다음의 3개의 문단들, 도 1 내지 도 7 및 이들의 대응하는 설명들은, 제 1 서브-프레임을 수신하기 위한 수단; 제 2 서브-프레임의 프리앰블이 수신될 때까지 제 1 서브-프레임의 유효성의 결정을 연기하기 위한 수단; 제 2 서브-프레임의 프리앰블을 수신하기 위한 수단; 제 1 서브-프레임, 및 제 2 서브-프레임의 프리앰블을 사용하여, 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하기 위한 수단; 제 1 서브-프레임의 프리앰블 및 제 1 서브-프레임의 디코딩된 코드워드들을 생성하기 위해 제 1 서브-프레임을 디코딩하기 위한 수단 ― 제 1 서브-프레임의 프리앰블 및 제 1 서브-프레임의 디코딩된 코드워드들은 디코딩된 제 1 서브-프레임을 형성함 ― ; 제 1 서브-프레임의 프리앰블, 제 1 서브-프레임의 디코딩된 코드워드들 및 제 2 서브-프레임의 프리앰블에 적어도 부분적으로 기초하여 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하기 위한 수단; 제 1 서브-프레임의 디코딩된 코드워드들에 대해 패리티 검사를 수행하기 위한 수단; 패리티 검사가 통과하면 제 1 서브-프레임의 디코딩된 코드워드들을 수용하기 위한 수단; 패리티 검사가 실패하면 제 1 서브-프레임의 디코딩된 코드워드들을 폐기하기 위한 수단; 제 1 서브-프레임의 프리앰블의 극성 및 제 2 서브-프레임의 프리앰블의 극성을 비교하기 위한 수단; 제 1 서브-프레임의 프리앰블의 극성과 제 2 서브-프레임의 프리앰블의 극성 사이에 매칭이 존재하면 제 1 서브-프레임의 디코딩된 코드워드들을 수용하기 위한 수단; 제 1 서브-프레임의 프리앰블의 극성과 제 2 서브-프레임의 프리앰블의 극성 사이에 미스매칭이 존재하면 제 1 서브-프레임의 디코딩된 코드워드들을 폐기하기 위한 수단; 예측된 제 1 서브-프레임을 형성하기 위해 제 1 서브-프레임을 예측하기 위한 수단; 예측된 제 1 서브-프레임을 디코딩된 제 1 서브-프레임과 비교하기 위한 수단; 예측된 제 1 서브-프레임과 디코딩된 제 1 서브-프레임 사이에 매칭이 존재하면 디코딩된 제 1 서브-프레임을 수용하기 위한 수단; 및 예측된 제 1 서브-프레임과 디코딩된 제 1 서브-프레임 사이에 미스매칭이 존재하면 디코딩된 제 1 서브-프레임을 폐기하기 위한 수단을 제공한다는 점이 주목된다.
[0066]
본원에 설명된 방법들 및 디바이스는 본 출원에 따른 다양한 수단에 의해 구현될 수 있다. 예를 들어, 이 방법들은 하드웨어, 펌웨어, 소프트웨어 또는 이들의 임의의 결합으로 구현될 수 있다. 하드웨어 구현에 있어서, 프로세싱 유닛들은 하나 또는 그 초과의 ASIC(application specific integrated circuit)들, DSP(digital signal processor)들, DSPD(digital signal processing device)들, PLD(programmable logic device)들, FPGA(field programmable gate array)들, 프로세서들, 제어기들, 마이크로제어기들, 마이크로프로세서들, 전자 디바이스들, 본원에 설명된 기능들을 수행하도록 설계되는 다른 전자 유닛들 또는 이들의 결합 내에서 구현될 수 있다. 여기서, "제어 로직"이라는 용어는 소프트웨어, 하드웨어, 펌웨어 또는 결합에 의해 구현되는 로직을 포함한다.
[0067]
펌웨어 및/또는 소프트웨어 구현에 있어서, 방법들은 본원에 설명된 기능들을 수행하는 모듈들(예를 들어, 프로시저들, 함수들 등)로 구현될 수 있다. 명령들을 유형으로 구현하는 임의의 기계 판독가능한 매체는 본원에 설명된 방법들을 구현하는데 사용될 수 있다. 예를 들어, 소프트웨어 코드들은 메모리에 저장되고, 프로세싱 유닛에 의해 실행될 수 있다. 메모리는 프로세싱 유닛 내부에서 또는 프로세싱 유닛 외부에서 구현될 수 있다. 본원에서 사용되는 바와 같이, "메모리"라는 용어는 임의의 타입의 롱 텀, 쇼트 텀, 휘발성, 비휘발성 또는 다른 저장 디바이스들을 지칭하며, 임의의 특정 타입의 메모리 또는 임의의 특정 수의 메모리들 또는 메모리가 저장되는 임의의 특정 타입의 매체들에 제한되는 것은 아니다.
[0068]
펌웨어 및/또는 소프트웨어로 구현되는 경우, 기능들은 컴퓨터 판독가능한 매체 상에 하나 또는 그 초과의 명령들 또는 코드로서 저장될 수 있다. 예들은 데이터 구조를 이용하여 인코딩되는 컴퓨터 판독가능한 매체들 및 컴퓨터 프로그램을 이용하여 인코딩되는 컴퓨터 판독가능한 매체들을 포함한다. 컴퓨터 판독가능한 매체들은 제조사의 물품의 형태를 취할 수 있다. 컴퓨터 판독가능한 매체들은 물리적 컴퓨터 저장 매체들 및/또는 다른 비-일시적 매체들을 포함한다. 저장 매체는 컴퓨터에 의해 액세스될 수 있는 임의의 이용가능한 매체일 수 있다. 제한이 아닌 예로서, 이러한 컴퓨터 판독가능한 매체들은 RAM, ROM, EEPROM, CD-ROM 또는 다른 광학 디스크 스토리지, 자기 디스크 스토리지 또는 다른 자기 저장 디바이스들, 또는 원하는 프로그램 코드를 명령들 또는 데이터 구조들의 형태로 저장하는데 사용될 수 있고, 컴퓨터에 의해 액세스될 수 있는 임의의 다른 매체를 포함할 수 있고; 본원에서 사용되는 바와 같은 디스크(disk 및 disc)는 CD(compact disc), 레이저 디스크(disc), 광학 디스크(disc), DVD(digital versatile disc), 플로피 디스크(disk) 및 블루-레이 디스크(disc)를 포함하며, 여기서 디스크(disk)들은 통상적으로 데이터를 자기적으로 재생하는 반면, 디스크(disc)들은 레이저들을 이용하여 데이터를 광학적으로 재생한다. 위의 것들의 결합들은 또한, 컴퓨터 판독가능한 매체들의 범위 내에 포함되어야 한다.
[0069]
컴퓨터 판독가능한 매체 상에서의 저장과 더불어, 명령들 및/또는 데이터는 통신 장치에 포함되는 송신 매체들 상에 신호들로서 제공될 수 있다. 예를 들어, 통신 장치는 명령들 및 데이터를 표시하는 신호들을 갖는 트랜시버를 포함할 수 있다. 명령들 및 데이터는 하나 또는 그 초과의 프로세서들로 하여금 청구항들에서 약술되는 기능들을 구현하게 하도록 구성된다. 즉, 통신 장치는 개시된 기능들을 수행하기 위해 정보를 표시하는 신호들을 이용하는 송신 매체들을 포함한다. 첫 번째로, 통신 장치에 포함되는 송신 매체들은 개시된 기능들을 수행하기 위해 정보의 제 1 부분을 포함할 수 있는 한편, 두 번째로, 통신 장치에 포함되는 송신 매체들은 개시된 기능들을 수행하기 위해 정보의 제 2 부분을 포함할 수 있다.
[0070]
본 개시는 WWAN(wide area wireless network), WLAN(wireless local area network), WPAN(wireless personal area network) 등과 같은 다양한 무선 통신 네트워크들과 함께 구현될 수 있다. "네트워크" 및 "시스템"이라는 용어들은 종종 상호교환가능하게 사용된다. "포지션" 및 "위치"라는 용어들은 종종 상호교환가능하게 사용된다. WWAN은 CDMA(Code Division Multiple Access) 네트워크, TDMA(Time Division Multiple Access) 네트워크, FDMA(Frequency Division Multiple Access) 네트워크, OFDMA(Orthogonal Frequency Division Multiple Access) 네트워크, SC-FDMA(Single-Carrier Frequency Division Multiple Access) 네트워크, LTE(Long Term Evolution) 네트워크, WiMAX(IEEE 802.16) 네트워크 등일 수 있다. CDMA 네트워크는 cdma2000, W-CDMA(Wideband-CDMA) 등과 같은 하나 또는 그 초과의 RAT(radio access technology)들을 구현할 수 있다. cdma2000은 IS-95, IS2000 및 IS-856 표준들을 포함한다. TDMA 네트워크는 GSM(Global System for Mobile Communications), D-AMPS(Digital Advanced Mobile Phone System), 또는 몇몇 다른 RAT를 구현할 수 있다. GSM 및 W-CDMA는 "3GPP(3rd Generation Partnership Project)"로 명명된 컨소시엄으로부터의 문서들에 설명되어 있다. cdma2000은 "3GPP2(3rd Generation Partnership Project 2)"로 명명된 컨소시엄으로부터의 문서들에 설명되어 있다. 3GPP 및 3GPP2 문서들은 공개적으로 입수가능하다. WLAN은 IEEE 802.11x 네트워크일 수 있고, WPAN은 블루투스 네트워크, IEEE 802.15x, 또는 몇몇 다른 타입의 네트워크일 수 있다. 기법들은 또한, WWAN, WLAN 및/또는 WPAN의 임의의 결합과 함께 구현될 수 있다.
[0071]
이동국은, 셀룰러 디바이스 또는 다른 무선 통신 디바이스, PCS(personal communication system) 디바이스, PND(personal navigation device), PIM(Personal Information Manager), PDA(Personal Digital Assistant), 랩탑 또는 무선 통신 및/또는 네비게이션 신호들을 수신할 수 있는 다른 적합한 네비게이션 디바이스와 같은 디바이스를 지칭한다. "이동국"이라는 용어는 또한 ― 위성 신호 수신, 보조 데이터 수신 및/또는 포지션-관련 프로세싱이 디바이스에서 발생하는지 아니면 PND(personal navigation device)에서 발생하는지에 관계없이 ― 이를테면, 단거리 무선, 적외선, 유선 연결 또는 다른 연결에 의해 PND와 통신하는 디바이스들을 포함하는 것으로 의도된다. 또한, "이동국"은, 이를테면, 인터넷, Wi-Fi 또는 다른 네트워크를 통해, 그리고 위성 신호 수신, 보조 데이터 수신 및/또는 포지션-관련 프로세싱이 디바이스에서 발생하는지, 서버에서 발생하는지 아니면 네트워크와 연관된 다른 디바이스에서 발생하는지에 관계없이, 서버와 통신할 수 있는, 무선 통신 디바이스들, 컴퓨터들, 랩탑들 등을 포함하는 모든 디바이스들을 포함하는 것으로 의도된다. 위의 것들의 임의의 동작가능한 결합이 또한 "이동국"으로서 고려된다.
[0072]
어떠한 것이 "최적화", "요구"된다는 지정 또는 다른 지정은 본 개시가 최적화된 시스템들 또는 "요구되는" 엘리먼트들이 제시되는 시스템들(또는 다른 지정들에 기인한 다른 제한)에만 적용됨을 표시하지 않는다. 이러한 지정들은 단지, 설명된 특정 구현만을 지칭한다. 물론, 많은 구현들이 가능하다. 기법들은 개발 중에 있거나 또는 개발될 프로토콜들을 포함하여 본원에 논의된 프로토콜들 외의 프로토콜들에 사용될 수 있다.
[0073]
당업자는 동일한 기초의 근본적 메커니즘들 및 방법들을 여전히 이용하면서, 개시된 실시예들의 많은 가능한 수정들 및 결합들이 사용될 수 있다는 것을 인식할 것이다. 설명을 목적으로, 위의 설명은 특정 실시예들을 참조로 기재되었다. 그러나, 위의 예시적 논의들은 총망라하는 것(exhaustive)으로 또는 개시된 바로 그 형태들로 본 개시를 제한하는 것으로 의도되지 않는다. 위의 교시들을 고려하여 많은 수정들 및 변화들이 가능하다. 실시예들은, 본 개시의 원리들 및 이들의 실제 응용들을 설명하고 당업자들이 참작되는 특정 사용에 적합한 다양한 수정들에 본 개시 및 다양한 실시예들을 가장 알맞게 활용할 수 있게 하기 위해서 선택되고 설명되었다.
Claims (24)
- 위성 신호의 연속적 서브-프레임들 사이에서 데이터를 디코딩하는 방법으로서,
제 1 서브-프레임을 수신하는 단계;
제 2 서브-프레임의 프리앰블이 수신될 때까지 상기 제 1 서브-프레임의 유효성의 결정을 연기하는 단계;
상기 제 2 서브-프레임의 프리앰블을 수신하는 단계; 및
상기 제 1 서브-프레임, 및 상기 제 2 서브-프레임의 프리앰블을 사용하여, 상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하는 단계를 포함하는,
위성 신호의 연속적 서브-프레임들 사이에서 데이터를 디코딩하는 방법. - 제 1 항에 있어서,
상기 제 1 서브-프레임은 프리앰블, 복수의 워드들을 포함하고,
각각의 워드는 하나 또는 그 초과의 인터리빙된 코드워드들을 포함하고,
상기 제 1 서브-프레임 및 상기 제 2 서브-프레임은 상기 위성 신호의 연속적 서브-프레임들인,
위성 신호의 연속적 서브-프레임들 사이에서 데이터를 디코딩하는 방법. - 제 1 항에 있어서,
상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하는 단계는,
상기 제 1 서브-프레임의 프리앰블 및 제 1 서브-프레임의 디코딩된 코드워드들을 생성하기 위해 상기 제 1 서브-프레임을 디코딩하는 단계 ― 상기 제 1 서브-프레임의 프리앰블 및 상기 제 1 서브-프레임의 디코딩된 코드워드들은 디코딩된 제 1 서브-프레임을 형성함 ― ; 및
상기 제 1 서브-프레임의 프리앰블, 상기 제 1 서브-프레임의 디코딩된 코드워드들 및 상기 제 2 서브-프레임의 프리앰블에 적어도 부분적으로 기초하여 상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하는 단계를 포함하는,
위성 신호의 연속적 서브-프레임들 사이에서 데이터를 디코딩하는 방법. - 제 3 항에 있어서,
상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하는 단계는,
상기 제 1 서브-프레임의 디코딩된 코드워드들에 대해 패리티 검사를 수행하는 단계;
상기 패리티 검사가 통과하면 상기 제 1 서브-프레임의 디코딩된 코드워드들을 수용하는 단계; 및
상기 패리티 검사가 실패하면 상기 제 1 서브-프레임의 디코딩된 코드워드들을 폐기하는 단계를 더 포함하는,
위성 신호의 연속적 서브-프레임들 사이에서 데이터를 디코딩하는 방법. - 제 3 항에 있어서,
상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하는 단계는,
상기 제 1 서브-프레임의 프리앰블의 극성 및 상기 제 2 서브-프레임의 프리앰블의 극성을 비교하는 단계;
상기 제 1 서브-프레임의 프리앰블의 극성과 상기 제 2 서브-프레임의 프리앰블의 극성 사이에 매칭이 존재하면 상기 제 1 서브-프레임의 디코딩된 코드워드들을 수용하는 단계; 및
상기 제 1 서브-프레임의 프리앰블의 극성과 상기 제 2 서브-프레임의 프리앰블의 극성 사이에 미스매칭이 존재하면 상기 제 1 서브-프레임의 디코딩된 코드워드들을 폐기하는 단계를 더 포함하는,
위성 신호의 연속적 서브-프레임들 사이에서 데이터를 디코딩하는 방법. - 제 3 항에 있어서,
상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하는 단계는,
예측된 제 1 서브-프레임을 형성하기 위해 상기 제 1 서브-프레임을 예측하는 단계;
상기 예측된 제 1 서브-프레임을 상기 디코딩된 제 1 서브-프레임과 비교하는 단계;
상기 예측된 제 1 서브-프레임과 상기 디코딩된 제 1 서브-프레임 사이에 매칭이 존재하면 상기 디코딩된 제 1 서브-프레임을 수용하는 단계; 및
상기 예측된 제 1 서브-프레임과 상기 디코딩된 제 1 서브-프레임 사이에 미스매칭이 존재하면 상기 디코딩된 제 1 서브-프레임을 폐기하는 단계를 더 포함하는,
위성 신호의 연속적 서브-프레임들 사이에서 데이터를 디코딩하는 방법. - GNSS 수신기로서,
무선 트랜시버; 및
신호 디코딩 모듈을 포함하고,
상기 무선 트랜시버는 제 1 서브-프레임을 수신하도록 구성되는 로직을 포함하고,
상기 신호 디코딩 모듈은 제 2 서브-프레임의 프리앰블이 수신될 때까지 상기 제 1 서브-프레임의 유효성의 결정을 연기하도록 구성되는 로직을 포함하고,
상기 무선 트랜시버는 상기 제 2 서브-프레임의 프리앰블을 수신하도록 구성되는 로직을 포함하고,
상기 신호 디코딩 모듈은 상기 제 1 서브-프레임, 및 상기 제 2 서브-프레임의 프리앰블을 사용하여, 상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하도록 구성되는 로직을 포함하는,
GNSS 수신기. - 제 7 항에 있어서,
상기 제 1 서브-프레임은 프리앰블, 복수의 워드들을 포함하고,
각각의 워드는 하나 또는 그 초과의 인터리빙된 코드워드들을 포함하고,
상기 제 1 서브-프레임 및 상기 제 2 서브-프레임은 위성 신호의 연속적 서브-프레임들인,
GNSS 수신기. - 제 7 항에 있어서,
상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하도록 구성되는 로직은,
상기 제 1 서브-프레임의 프리앰블 및 제 1 서브-프레임의 디코딩된 코드워드들을 생성하기 위해 상기 제 1 서브-프레임을 디코딩하도록 구성되는 로직 ― 상기 제 1 서브-프레임의 프리앰블 및 상기 제 1 서브-프레임의 디코딩된 코드워드들은 디코딩된 제 1 서브-프레임을 형성함 ― ; 및
상기 제 1 서브-프레임의 프리앰블, 상기 제 1 서브-프레임의 디코딩된 코드워드들 및 상기 제 2 서브-프레임의 프리앰블에 적어도 부분적으로 기초하여 상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하도록 구성되는 로직을 포함하는,
GNSS 수신기. - 제 9 항에 있어서,
상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하도록 구성되는 로직은,
상기 제 1 서브-프레임의 디코딩된 코드워드들에 대해 패리티 검사를 수행하도록 구성되는 로직;
상기 패리티 검사가 통과하면 상기 제 1 서브-프레임의 디코딩된 코드워드들을 수용하도록 구성되는 로직; 및
상기 패리티 검사가 실패하면 상기 제 1 서브-프레임의 디코딩된 코드워드들을 폐기하도록 구성되는 로직을 더 포함하는,
GNSS 수신기. - 제 9 항에 있어서,
상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하도록 구성되는 로직은,
상기 제 1 서브-프레임의 프리앰블의 극성 및 상기 제 2 서브-프레임의 프리앰블의 극성을 비교하도록 구성되는 로직;
상기 제 1 서브-프레임의 프리앰블의 극성과 상기 제 2 서브-프레임의 프리앰블의 극성 사이에 매칭이 존재하면 상기 제 1 서브-프레임의 디코딩된 코드워드들을 수용하도록 구성되는 로직; 및
상기 제 1 서브-프레임의 프리앰블의 극성과 상기 제 2 서브-프레임의 프리앰블의 극성 사이에 미스매칭이 존재하면 상기 제 1 서브-프레임의 디코딩된 코드워드들을 폐기하도록 구성되는 로직을 더 포함하는,
GNSS 수신기. - 제 9 항에 있어서,
상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하도록 구성되는 로직은,
예측된 제 1 서브-프레임을 형성하기 위해 상기 제 1 서브-프레임을 예측하도록 구성되는 로직;
상기 예측된 제 1 서브-프레임을 상기 디코딩된 제 1 서브-프레임과 비교하도록 구성되는 로직;
상기 예측된 제 1 서브-프레임과 상기 디코딩된 제 1 서브-프레임 사이에 매칭이 존재하면 상기 디코딩된 제 1 서브-프레임을 수용하도록 구성되는 로직; 및
상기 예측된 제 1 서브-프레임과 상기 디코딩된 제 1 서브-프레임 사이에 미스매칭이 존재하면 상기 디코딩된 제 1 서브-프레임을 폐기하도록 구성되는 로직을 더 포함하는,
GNSS 수신기. - 하나 또는 그 초과의 컴퓨터 시스템들에 의해 실행하기 위한 명령들을 저장하는 비-일시적 매체를 포함하는 컴퓨터 프로그램 물건으로서,
상기 명령들은,
제 1 서브-프레임을 수신하기 위한 명령들;
제 2 서브-프레임의 프리앰블이 수신될 때까지 상기 제 1 서브-프레임의 유효성의 결정을 연기하기 위한 명령들;
상기 제 2 서브-프레임의 프리앰블을 수신하기 위한 명령들; 및
상기 제 1 서브-프레임, 및 상기 제 2 서브-프레임의 프리앰블을 사용하여, 상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하기 위한 명령들을 포함하는,
컴퓨터 프로그램 물건. - 제 13 항에 있어서,
상기 제 1 서브-프레임은 프리앰블, 복수의 워드들을 포함하고,
각각의 워드는 하나 또는 그 초과의 인터리빙된 코드워드들을 포함하고,
상기 제 1 서브-프레임 및 상기 제 2 서브-프레임은 위성 신호의 연속적 서브-프레임들인,
컴퓨터 프로그램 물건. - 제 13 항에 있어서,
상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하기 위한 명령들은,
상기 제 1 서브-프레임의 프리앰블 및 제 1 서브-프레임의 디코딩된 코드워드들을 생성하기 위해 상기 제 1 서브-프레임을 디코딩하기 위한 명령들 ― 상기 제 1 서브-프레임의 프리앰블 및 상기 제 1 서브-프레임의 디코딩된 코드워드들은 디코딩된 제 1 서브-프레임을 형성함 ― ; 및
상기 제 1 서브-프레임의 프리앰블, 상기 제 1 서브-프레임의 디코딩된 코드워드들 및 상기 제 2 서브-프레임의 프리앰블에 적어도 부분적으로 기초하여 상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하기 위한 명령들을 포함하는,
컴퓨터 프로그램 물건. - 제 15 항에 있어서,
상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하기 위한 명령들은,
상기 제 1 서브-프레임의 디코딩된 코드워드들에 대해 패리티 검사를 수행하기 위한 명령들;
상기 패리티 검사가 통과하면 상기 제 1 서브-프레임의 디코딩된 코드워드들을 수용하기 위한 명령들; 및
상기 패리티 검사가 실패하면 상기 제 1 서브-프레임의 디코딩된 코드워드들을 폐기하기 위한 명령들을 더 포함하는,
컴퓨터 프로그램 물건. - 제 15 항에 있어서,
상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하기 위한 명령들은,
상기 제 1 서브-프레임의 프리앰블의 극성 및 상기 제 2 서브-프레임의 프리앰블의 극성을 비교하기 위한 명령들;
상기 제 1 서브-프레임의 프리앰블의 극성과 상기 제 2 서브-프레임의 프리앰블의 극성 사이에 매칭이 존재하면 상기 제 1 서브-프레임의 디코딩된 코드워드들을 수용하기 위한 명령들; 및
상기 제 1 서브-프레임의 프리앰블의 극성과 상기 제 2 서브-프레임의 프리앰블의 극성 사이에 미스매칭이 존재하면 상기 제 1 서브-프레임의 디코딩된 코드워드들을 폐기하기 위한 명령들을 더 포함하는,
컴퓨터 프로그램 물건. - 제 15 항에 있어서,
상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하기 위한 명령들은,
예측된 제 1 서브-프레임을 형성하기 위해 상기 제 1 서브-프레임을 예측하기 위한 명령들;
상기 예측된 제 1 서브-프레임을 상기 디코딩된 제 1 서브-프레임과 비교하기 위한 명령들;
상기 예측된 제 1 서브-프레임과 상기 디코딩된 제 1 서브-프레임 사이에 매칭이 존재하면 상기 디코딩된 제 1 서브-프레임을 수용하기 위한 명령들; 및
상기 예측된 제 1 서브-프레임과 상기 디코딩된 제 1 서브-프레임 사이에 미스매칭이 존재하면 상기 디코딩된 제 1 서브-프레임을 폐기하기 위한 명령들을 더 포함하는,
컴퓨터 프로그램 물건. - 장치로서,
제 1 서브-프레임을 수신하기 위한 수단;
제 2 서브-프레임의 프리앰블이 수신될 때까지 상기 제 1 서브-프레임의 유효성의 결정을 연기하기 위한 수단;
상기 제 2 서브-프레임의 프리앰블을 수신하기 위한 수단; 및
상기 제 1 서브-프레임, 및 상기 제 2 서브-프레임의 프리앰블을 사용하여, 상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하기 위한 수단을 포함하는,
장치. - 제 19 항에 있어서,
상기 제 1 서브-프레임은 프리앰블, 복수의 워드들을 포함하고,
각각의 워드는 하나 또는 그 초과의 인터리빙된 코드워드들을 포함하고,
상기 제 1 서브-프레임 및 상기 제 2 서브-프레임은 위성 신호의 연속적 서브-프레임들인,
장치. - 제 19 항에 있어서,
상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하기 위한 수단은,
상기 제 1 서브-프레임의 프리앰블 및 제 1 서브-프레임의 디코딩된 코드워드들을 생성하기 위해 상기 제 1 서브-프레임을 디코딩하기 위한 수단 ― 상기 제 1 서브-프레임의 프리앰블 및 상기 제 1 서브-프레임의 디코딩된 코드워드들은 디코딩된 제 1 서브-프레임을 형성함 ― ; 및
상기 제 1 서브-프레임의 프리앰블, 상기 제 1 서브-프레임의 디코딩된 코드워드들 및 상기 제 2 서브-프레임의 프리앰블에 적어도 부분적으로 기초하여 상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하기 위한 수단을 포함하는,
장치. - 제 21 항에 있어서,
상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하기 위한 수단은,
상기 제 1 서브-프레임의 디코딩된 코드워드들에 대해 패리티 검사를 수행하기 위한 수단;
상기 패리티 검사가 통과하면 상기 제 1 서브-프레임의 디코딩된 코드워드들을 수용하기 위한 수단; 및
상기 패리티 검사가 실패하면 상기 제 1 서브-프레임의 디코딩된 코드워드들을 폐기하기 위한 수단을 더 포함하는,
장치. - 제 21 항에 있어서,
상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하기 위한 수단은,
상기 제 1 서브-프레임의 프리앰블의 극성 및 상기 제 2 서브-프레임의 프리앰블의 극성을 비교하기 위한 수단;
상기 제 1 서브-프레임의 프리앰블의 극성과 상기 제 2 서브-프레임의 프리앰블의 극성 사이에 매칭이 존재하면 상기 제 1 서브-프레임의 디코딩된 코드워드들을 수용하기 위한 수단; 및
상기 제 1 서브-프레임의 프리앰블의 극성과 상기 제 2 서브-프레임의 프리앰블의 극성 사이에 미스매칭이 존재하면 상기 제 1 서브-프레임의 디코딩된 코드워드들을 폐기하기 위한 수단을 더 포함하는,
장치. - 제 21 항에 있어서,
상기 제 1 서브-프레임의 데이터 디코딩 에러가 존재하는지 여부를 결정하기 위한 수단은,
예측된 제 1 서브-프레임을 형성하기 위해 상기 제 1 서브-프레임을 예측하기 위한 수단;
상기 예측된 제 1 서브-프레임을 상기 디코딩된 제 1 서브-프레임과 비교하기 위한 수단;
상기 예측된 제 1 서브-프레임과 상기 디코딩된 제 1 서브-프레임 사이에 매칭이 존재하면 상기 디코딩된 제 1 서브-프레임을 수용하기 위한 수단; 및
상기 예측된 제 1 서브-프레임과 상기 디코딩된 제 1 서브-프레임 사이에 미스매칭이 존재하면 상기 디코딩된 제 1 서브-프레임을 폐기하기 위한 수단을 더 포함하는,
장치.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/029,449 US9231690B2 (en) | 2013-09-17 | 2013-09-17 | Signal tracking and decoding in GNSS |
| US14/029,449 | 2013-09-17 | ||
| PCT/US2014/051039 WO2015053856A2 (en) | 2013-09-17 | 2014-08-14 | Signal tracking and decoding in gnss |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20160057425A true KR20160057425A (ko) | 2016-05-23 |
Family
ID=52597246
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020167009545A KR20160057425A (ko) | 2013-09-17 | 2014-08-14 | Gnss에서의 신호 추적 및 디코딩 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9231690B2 (ko) |
| EP (1) | EP3047305A2 (ko) |
| JP (1) | JP2016536606A (ko) |
| KR (1) | KR20160057425A (ko) |
| CN (1) | CN105556871A (ko) |
| WO (1) | WO2015053856A2 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230063166A (ko) * | 2021-11-01 | 2023-05-09 | 한국항공우주연구원 | 저궤도 위성을 이용한 위치결정 시스템 및 위치결정 방법 |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10185035B2 (en) * | 2014-12-30 | 2019-01-22 | Mediatek Inc. | Satellite-based positioning method and associated apparatus |
| EP3244620B1 (en) * | 2015-01-05 | 2019-09-04 | LG Electronics Inc. -1- | Broadcast signal transmission apparatus, broadcast signal reception apparatus, broadcast signal transmission method, and broadcast signal reception method |
| DE112019004718T5 (de) * | 2018-09-21 | 2021-06-10 | Sony Semiconductor Solutions Corporation | Empfangsvorrichtung und empfangsverfahren |
| WO2020074366A1 (en) * | 2018-10-09 | 2020-04-16 | The European Union, Represented By The European Commission | Transmission of satellite navigation message into multiple pages encoded for optimal retrieval at receiver in a fully interchangeable way |
| CN110673174B (zh) * | 2019-10-23 | 2022-04-08 | 展讯通信(上海)有限公司 | 星历收集方法、装置、卫星导航接收机及存储介质 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5099500A (en) | 1988-10-14 | 1992-03-24 | Concord Communications, Inc. | Symbol detection and error correction coding in a local area network |
| JP3717133B2 (ja) * | 1997-02-20 | 2005-11-16 | 松下電器産業株式会社 | Gps受信機 |
| US5847680A (en) | 1997-12-05 | 1998-12-08 | Trimble Navigation Limited | GPS receiver having fast resolution of carrier phase ambiguity |
| US6104978A (en) | 1998-04-06 | 2000-08-15 | General Electric Company | GPS-based centralized tracking system with reduced energy consumption |
| US6816710B2 (en) * | 1998-05-06 | 2004-11-09 | Snaptrack, Inc. | Method and apparatus for signal processing in a satellite positioning system |
| US6577271B1 (en) * | 1999-03-30 | 2003-06-10 | Sirf Technology, Inc | Signal detector employing coherent integration |
| US6611756B1 (en) * | 2000-08-10 | 2003-08-26 | Lucent Technologies Inc. | Method for predicting navigation information in a global positioning system |
| US7924947B2 (en) | 2004-02-06 | 2011-04-12 | Broadcom Corporation | Method and apparatus for decoding satellite navigation data from a satellite positioning system |
| JP2007263595A (ja) * | 2006-03-27 | 2007-10-11 | Casio Comput Co Ltd | 時刻修正制御装置及び時刻修正制御方法 |
| JP2008048239A (ja) | 2006-08-18 | 2008-02-28 | Nec Electronics Corp | シンボルタイミング検出方法および装置並びにプリアンブル検出方法および装置 |
| JP4777286B2 (ja) | 2007-03-27 | 2011-09-21 | パナソニック株式会社 | 通信装置、通信システム、および通信制御方法 |
| EP2232292B1 (en) * | 2007-12-14 | 2013-08-14 | Magellan Systems Japan, Inc. | Process for sub-microsecond time transfer using weak gps/gnss signals |
| EP2114012A1 (en) * | 2008-04-28 | 2009-11-04 | Deutsche Thomson OHG | Cycle slip detection for timing recovery |
| WO2009134103A2 (ko) * | 2008-04-30 | 2009-11-05 | 엘지전자 주식회사 | 시스템 정보 전달 방법 및 서브프레임 구조 |
| US8311174B1 (en) | 2008-05-16 | 2012-11-13 | Xilinx, Inc. | Persistent synchronization within a media oriented systems transport network |
| US8724745B2 (en) * | 2010-08-27 | 2014-05-13 | Lsi Corporation | Method and apparatus for decoding coded data streams |
| JP5553909B2 (ja) * | 2010-12-13 | 2014-07-23 | 古野電気株式会社 | サイクルスリップ検出装置、サイクルスリップ検出のための集積回路、同集積回路を備えるgnss受信装置、同gnss受信装置を備える情報端末機器、サイクルスリップ検出方法及びプログラム |
| US8830123B2 (en) * | 2011-05-12 | 2014-09-09 | Accord Software & Systems Pvt. Ltd. | Satellite navigation system for optimal time to first fix using code and carrier diversity |
-
2013
- 2013-09-17 US US14/029,449 patent/US9231690B2/en not_active Expired - Fee Related
-
2014
- 2014-08-14 KR KR1020167009545A patent/KR20160057425A/ko not_active Application Discontinuation
- 2014-08-14 EP EP14841397.4A patent/EP3047305A2/en not_active Withdrawn
- 2014-08-14 WO PCT/US2014/051039 patent/WO2015053856A2/en active Application Filing
- 2014-08-14 CN CN201480050776.2A patent/CN105556871A/zh active Pending
- 2014-08-14 JP JP2016541978A patent/JP2016536606A/ja active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230063166A (ko) * | 2021-11-01 | 2023-05-09 | 한국항공우주연구원 | 저궤도 위성을 이용한 위치결정 시스템 및 위치결정 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016536606A (ja) | 2016-11-24 |
| WO2015053856A3 (en) | 2015-07-23 |
| WO2015053856A2 (en) | 2015-04-16 |
| EP3047305A2 (en) | 2016-07-27 |
| US9231690B2 (en) | 2016-01-05 |
| CN105556871A (zh) | 2016-05-04 |
| US20150078249A1 (en) | 2015-03-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20160057425A (ko) | Gnss에서의 신호 추적 및 디코딩 | |
| KR101514933B1 (ko) | 시각적 비콘에 대한 식별자 발생 | |
| KR102228715B1 (ko) | 위치 식별 시스템의 프레임 동기 방법 및 장치 | |
| TWI474691B (zh) | 資料訊號相位反轉校正方法及系統 | |
| KR101388765B1 (ko) | 대역-내 모뎀에서의 동기 추적 시스템 및 방법 | |
| KR101553125B1 (ko) | 위성 측위 시스템 수신기들에서의 시간-설정을 위한 방법, 장치, 및 컴퓨터 판독 가능 매체 | |
| US20120051402A1 (en) | Hybrid Bit Extraction For Global Position Receiver | |
| JP2011052987A (ja) | 測位データ受信機、エラー訂正装置およびプログラム | |
| US8619919B2 (en) | Selective coherent and non-coherent demodulation methods and apparatuses | |
| JP2013542423A (ja) | パケット同期を検出するためのシステムおよび方法 | |
| EP3511741B1 (en) | Positioning receiver | |
| CN111224741B (zh) | 卫星导航用bch码译码方法、译码器及卫星导航接收机 | |
| CN111208538B (zh) | 电文的解调方法及装置 | |
| CN112698366A (zh) | 一种卫星定位接收机帧同步方法 | |
| JP2007248094A (ja) | データ通信方法、データ通信システム、データ送信局装置およびデータ受信端末装置 | |
| KR101435805B1 (ko) | 단말의 수신 메시지 에러 정정 방법 및 장치 | |
| Crosta et al. | A simplified convolutional decoder for galileo os: performance evaluation with a galileo mass-market receiver in live scenario | |
| JP6164965B2 (ja) | 受信装置および受信方法 | |
| JP6549889B2 (ja) | 復号装置、受信機、無線伝送システムおよび誤り検出方法 | |
| JP2006109019A (ja) | 誤り訂正回路及び誤り訂正方法 | |
| WO2017175294A1 (ja) | 信号受信装置及び信号受信方法 | |
| TW201103330A (en) | Teletext decoder |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WITN | Withdrawal due to no request for examination |