KR20160051321A - 차량의 능동 사이드 뷰 시스템 - Google Patents
차량의 능동 사이드 뷰 시스템 Download PDFInfo
- Publication number
- KR20160051321A KR20160051321A KR1020140151128A KR20140151128A KR20160051321A KR 20160051321 A KR20160051321 A KR 20160051321A KR 1020140151128 A KR1020140151128 A KR 1020140151128A KR 20140151128 A KR20140151128 A KR 20140151128A KR 20160051321 A KR20160051321 A KR 20160051321A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- angle
- wide
- view
- road
- Prior art date
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R11/00—Arrangements for holding or mounting articles, not otherwise provided for
- B60R11/02—Arrangements for holding or mounting articles, not otherwise provided for for radio sets, television sets, telephones, or the like; Arrangement of controls thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R21/013—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over
- B60R21/0134—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents including means for detecting collisions, impending collisions or roll-over responsive to imminent contact with an obstacle, e.g. using radar systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
Abstract
본 발명은 차량의 능동 사이드 뷰 시스템에 관한 것으로서, 아웃사이드 미러 없이 카메라를 이용하여 주행조건이나 도로조건 등에 따라 최적의 뷰 영상을 제공할 수 있는 미러리스(morrorless) 시스템을 제공하는데 주된 목적이 있다. 상기한 목적을 달성하기 위해, 차량 좌우 양측에 설치되어 차량에 근접한 측후방 영역을 촬영하도록 설치되는 협각 카메라와; 차량 좌우 양측에 설치되어 차량으로부터 상기 협각 카메라에 비해 넓은 측후방 영역을 촬영하도록 설치되는 광각 카메라와; 차량의 주행조건을 검출하기 위한 주행조건 검출부와; 차량이 현재 주행하는 도로의 도로조건을 검출하기 위한 도로조건 검출부와; 상기 협각 카메라와 광각 카메라에 의해 촬영된 영상신호를 입력받아 처리하고, 주행조건과 운전조건에 따른 최적 뷰를 판단하여 협각 카메라와 광각 카메라에 의해 촬영된 협각 뷰 영상과 광각 뷰 영상 중 선택된 영상을 전달하는 제어기와; 상기 제어기에 의해 선택된 영상을 출력하여 표시하는 디스플레이 장치를 포함하는 차량의 능동 사이드 뷰 시스템이 개시된다.
Description
본 발명은 차량의 능동 사이드 뷰 시스템에 관한 것으로서, 더욱 상세하게는 아웃사이드 미러의 장착 없이 카메라를 이용하여 주행조건이나 도로조건 등에 따라 최적의 뷰 영상을 제공할 수 있는 미러리스(mirrorless) 능동 사이드 뷰 시스템에 관한 것이다.
일반적으로 차량을 운전할 때에는 운전자가 항상 전방을 주시해야 하는 동시에 후속 차량에도 주의해야 하기 때문에 운전자가 전방을 향한 자세로 후방을 확인할 수 있도록 해주는 다수의 미러(mirror)들이 차량에 장착된다.
예를 들어, 차량에는 실내 전방에 룸미러(room mirror), 차량 외부 좌우 양측에 각각 아웃사이드 미러(outside mirror)가 배치되어 설치되는 것이 일반적이다.
차량의 좌우 양측에 설치되는 아웃사이드 미러는 운전자가 차량의 측후방 시야를 확보할 수 있도록 해주며, 차량 실내 전방의 룸미러는 운전자가 차량의 후방 시야를 확보할 수 있도록 해준다.
이때, 운전자가 현재의 미러 각도에서 시야 확보가 어려운 경우 룸미러와 아웃사이드 미러의 각도를 적절히 조절하여 최대한의 시야를 확보할 수 있도록 하고 있다.
한편, 아웃사이드 미러는 차량의 측후방 상태를 운전자에게 제공하는 것으로, 주차 또는 차선 변경시 측후방에 위치한 상대 차량 및 장애물에 대한 정보를 운전자에게 제공하는 안전 운전의 필수 장치이다.
다만, 아웃사이드 미러는 통상적으로 차량 전방 양측에 크게 돌출되어 있는 형태로 설치되기 때문에 차량 주행시에 아웃사이드 미러로 인한 공기저항이 큰 편이다.
특히, 대형 트럭과 같은 상용 차량에서는 아웃사이드 미러의 크기가 승용 차량에 비해 크기 때문에 차량에서 공기저항(주행저항)을 크게 하는 인자 중에 하나가 될 수 있다.
이에 공기역학을 고려하여 아웃사이드 미러의 형태가 설계되고 있으나, 공기저항을 줄이는데 한계가 있으며, 아웃사이드 미러가 차량으로부터 크게 돌출되어 있으므로 좁은 길에서의 주변 장애물이나 주변 차량과의 접촉 발생 우려가 항상 존재한다.
또한, 아웃사이드 미러가 차체로부터 크게 돌출되어 있을 뿐만 아니라 대형의 상용 차량에서는 그 크기가 더욱 크기 때문에 차량 외관을 크게 저해하는 요소가 될 수 있다.
또한, 대형 트럭과 같이 차체가 길고 큰 차량의 경우 아웃사이드 미러의 반사각도가 제한되어 있기 때문에 차체 주변에 대해 아웃사이드 미러를 통해 후방 시야 확보가 가능한 각도에 있어 제한이 있고, 주행 중 사각지대가 크게 발생할 수 있다.
특히, 차량의 주행조건, 도로조건 등에 따라 발생하는 사각지대는 안전운전에 큰 위험요소로 작용하고 있는데, 예를 들어 곡선 도로에서 회전주행하거나 좁은 길을 주행할 때, 또는 오르막길이나 내리막길 주행시에 각 조건에 따른 사각지대가 발생하고, 그로 인해 시야 확보에 많은 어려움이 있는 것이 사실이다.
이러한 문제점을 해결하기 위해 사각지대를 해소할 목적으로 기존의 아웃사이드 미러와 함께 카메라를 장착하고 카메라를 시야 확보를 위한 보조적인 수단으로 사용하는 시스템, 또는 아웃사이드 미러를 아예 삭제하고 카메라로 대체하는 미러리스(mirrorless) 사이드 카메라 시스템이 제시된 바 있다.
그러나, 카메라를 통한 시야 확보의 경우에도 카메라가 일정 각도의 영상만을 제공하기 때문에 차량의 주행조건이나 도로조건 등에 따라서 영상 촬영이 불가한 사각지대가 크게 발생할 수 있고, 조건에 따른 최적 각도의 화면을 제공하지 못하는 제약이 있다.
따라서, 본 발명은 상기와 같은 문제점을 해결하기 위하여 창출한 것으로서, 아웃사이드 미러 없이 카메라를 이용하여 주행조건이나 도로조건 등에 따라 운전 사각지대를 최소화하는 최적의 뷰 영상을 제공할 수 있는 시스템을 제공하는데 그 목적이 있다.
상기한 목적을 달성하기 위하여, 본 발명에 따르면, 차량 좌우 양측에 설치되어 차량에 근접한 측후방 영역을 촬영하도록 설치되는 협각 카메라와; 차량 좌우 양측에 설치되어 차량으로부터 상기 협각 카메라에 비해 넓은 측후방 영역을 촬영하도록 설치되는 광각 카메라와; 차량의 주행조건을 검출하기 위한 주행조건 검출부와; 차량이 현재 주행하는 도로의 도로조건을 검출하기 위한 도로조건 검출부와; 상기 협각 카메라와 광각 카메라에 의해 촬영된 영상신호를 입력받아 처리하고, 주행조건과 운전조건에 따른 최적 뷰를 판단하여 협각 카메라와 광각 카메라에 의해 촬영된 협각 뷰 영상과 광각 뷰 영상 중 선택된 영상을 전달하는 제어기와; 상기 제어기에 의해 선택된 영상을 출력하여 표시하는 디스플레이 장치를 포함하는 차량의 능동 사이드 뷰 시스템을 제공한다.
여기서, 상기 주행조건 검출부는, 차량의 차속을 검출하기 위한 차속 검출부와; 운전자에 의한 스티어링휠 조작을 감지하는 조향 검출부를 포함할 수 있다.
이때, 제어기는, 상기 차속 검출부에 의해 검출되는 차속 정보와 조향 검출부의 신호로부터 차량이 곡선 도로를 주행하고 있음을 판단한 경우, 좌측 및 우측의 광각 카메라에 의해 촬영되는 영상을 디스플레이 장치에 표시되도록 전달한다.
또한, 상기 도로조건 검출부는 주행하는 도로상에서 차량 주변의 장애물을 검출하기 위한 측방 검출부를 포함할 수 있다.
이때, 제어기는, 주행조건 검출부의 차속 검출부에 의해 검출되는 차속 정보와 측방 검출부의 신호로부터 차량 주변에 존재하는 타 차량이나 장애물을 확인하여 차량이 좁은 도로를 주행하고 있음을 판단한 경우, 좌측 및 우측의 협각 카메라에 의해 촬영되는 영상을 디스플레이 장치에 표시되도록 전달한다.
또한, 상기 좌측 및 우측의 광각 카메라는 촬영이 이루어지는 뷰 영역을 도로조건 검출부에 의해 검출되는 도로조건에 따라 변경할 수 있도록 모터에 의해 회전 가능하게 구비될 수 있다.
이때, 상기 도로조건 검출부는 차량의 경사각을 검출하는 경사각 검출부를 포함할 수 있다.
여기서, 상기 좌측 및 우측의 광각 카메라는 모터에 의해 회전된 위치에 따라서 좌우로 넓게 촬영되는 좌우 광각 뷰 영상과, 상하로 넓게 촬영되는 상하 광각 뷰 영상이 선택적으로 촬영될 수 있도록 구비될 수 있다.
또한, 제어기는, 주행조건 검출부의 차속 검출부에 의해 검출되는 차속 정보와 도로조건 검출부의 경사각 검출부에 의해 검출되는 차량의 경사각 정보로부터 차량이 오르막길 또는 내리막길을 주행하고 있음을 판단한 경우, 상기 모터를 구동시켜 좌측 및 우측의 광각 카메라를 상하 광각 뷰 영상이 촬영될 수 있도록 회전시키고, 상기 광각 카메라에 의해 촬영된 상하 광각 뷰 영상을 디스플레이 장치에 표시되도록 전달한다.
이에 따라, 본 발명의 능동 사이드 뷰 시스템에 의하면, 아웃사이드 미러 없이 카메라를 이용하여 주행조건이나 도로조건 등에 따라 운전 사각지대를 최소화하는 최적의 뷰 영상을 제공할 수 있게 된다.
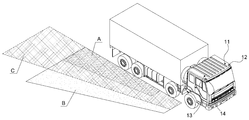
도 1은 본 발명의 실시예에 따른 능동 사이드 뷰 시스템에서 카메라 장착 위치 및 촬영 영역을 예시한 도면이다.
도 2는 본 발명의 실시예에 따른 능동 사이드 뷰 시스템에서 광각 카메라가 회전되는 상태를 예시한 도면이다.
도 3은 본 발명에 따른 능동 사이드 뷰 시스템의 구성을 나타내는 블록도이다.
도 4는 본 발명에 따른 능동 사이드 뷰 시스템의 작동 과정을 나타내는 순서도이다.
도 2는 본 발명의 실시예에 따른 능동 사이드 뷰 시스템에서 광각 카메라가 회전되는 상태를 예시한 도면이다.
도 3은 본 발명에 따른 능동 사이드 뷰 시스템의 구성을 나타내는 블록도이다.
도 4는 본 발명에 따른 능동 사이드 뷰 시스템의 작동 과정을 나타내는 순서도이다.
이하, 첨부한 도면을 참조하여 본 발명의 실시예에 대해 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자가 용이하게 실시할 수 있도록 상세히 설명하기로 한다.
본 발명은 아웃사이드 미러 없이 카메라를 이용하여 주행조건이나 도로조건 등에 따라 운전 사각지대를 최소화하는 최적의 뷰(view) 영상을 제공할 수 있는 차량의 능동 사이드 뷰 시스템에 관한 것이다.
도 1은 본 발명의 실시예에 따른 능동 사이드 뷰 시스템에서 카메라 장착 위치 및 촬영 영역을 예시한 도면이고, 도 2는 본 발명의 실시예에 따른 능동 사이드 뷰 시스템에서 광각 카메라가 회전되는 상태를 예시한 도면이다.
또한, 도 3은 본 발명에 따른 능동 사이드 뷰 시스템의 구성을 나타내는 블록도이다.
먼저, 도 1에 나타낸 바와 같이, 차체 전단부 상측, 예를 들어 대형 트럭의 경우 운전석을 이루는 캡(cab)의 상측에 차량 주변의 영상을 촬영할 수 있는 카메라(11~14)를 설치한다.
이때, 카메라(11~14)는 차량의 측후방을 촬영할 수 있도록 설치될 수 있고, 차량 좌우 양측에 협각 카메라(11,13)와 광각 카메라(12,14)가 각각 설치되어 차량 좌측과 우측의 각 측후방 영역이 촬영될 수 있도록 한다.
상기 협각 카메라(11,13)는 차량에 근접한 측후방 영역을 촬영할 수 있도록 설치되고, 광각 카메라(12,14)는 협각 카메라의 촬영 영역(뷰 영역)을 포함하여 협각 카메라의 촬영 영역보다 넓은 측후방 영역까지 촬영할 수 있도록 설치된다.
이를 위해 협각 카메라(11,13)로는 차량 주변의 좁은 뷰(시야) 영역(도 1의 'A' 영역)을 촬영할 수 있는 카메라가 사용되고, 광각 카메라(12,14)로는 차량 주변의 넓은 뷰 영역(도 1의 'B' 영역)을 촬영할 수 있는 카메라가 사용된다.
상기 협각 카메라(11,13)와 광각 카메라(12,14)는 각각의 정해진 영역을 촬영할 수 있도록 차체에 적절한 각도로 설치되는데, 광각 카메라(12,14)의 경우에는 촬영이 이루어지는 뷰 영역을 도로조건에 따라 변경할 수 있도록 회전 가능하게 설치된다.
예를 들어, 광각 카메라(12,14)를 도 2에 나타낸 바와 같이 90°각도로 회전시켜, 좌우로 넓게 촬영되는 좌우 광각 뷰 영상(도 1에서 'B' 영역 영상)과, 상하로 넓게 촬영되는 상하 광각 뷰 영상(도 1에서 'C' 영역 영상) 중 어느 하나가 선택적으로 획득될 수 있도록 광각 카메라의 촬영 영역을 전환해준다.
이를 위해 광각 카메라(12,14)에는 도면으로 예시하지는 않았으나 촬영 영역의 변경을 위해 카메라를 회전시키기 위한 회전력을 발생시키는 모터와, 카메라가 적정 속도로 회전될 수 있도록 모터의 회전력을 감속시켜 카메라에 전달하는 감속장치 등이 내장될 수 있다.
상기 광각 카메라(12,14)에 구비되는 모터(도 3에서 도면부호 33,34임)는 후술하는 제어기(20)에 의해 카메라를 원하는 방향 및 각도로 회전시킬 수 있도록 그 구동이 제어된다.
한편, 본 발명에 따른 능동 사이드 뷰 시스템은 상기한 카메라 외에, 차량의 주행조건을 검출하기 위한 주행조건 검출부와, 차량이 현재 주행하는 도로의 도로조건을 검출하기 위한 도로조건 검출부를 더 포함한다.
여기서, 주행조건 검출부는 차량의 차속을 검출하기 위한 차속 검출부(15), 및 운전자에 의한 스티어링휠 조작을 감지하는 조향 검출부(16)를 포함할 수 있다.
차속 검출부(15)는 차량에 설치되어 있는 통상의 차속 센서가 될 수 있으며, 차속 검출부(15)에 의해 검출되는 차속은 차량이 현재 주행 중인지 아니면 정차 중인지를 판단하기 위한 정보로 이용된다.
조향 검출부(16)는 차량에 설치되어 있는 조향각 센서가 될 수 있으며, 조향 검출부(16)의 신호는 운전자의 스티어링휠 조작을 통해 차량이 곡선 도로(커브길)를 주행하고 있는지를 판단하는데 이용된다.
즉, 조향각 센서의 신호(조향각 검출신호)로부터 운전자의 스티어링휠 조작을 감지하고, 스티어링휠 조작으로부터 차량이 곡선 도로를 주행하고 있는 것으로 판단할 수 있는 것이다.
또한, 도로조건 검출부는 차량의 경사각을 검출하는 경사각 검출부(17)와, 주행하는 도로상에서 차량 주변의 장애물을 검출하기 위한 측방 검출부(18)를 포함할 수 있다.
상기 경사각 검출부(17)에 의해 검출되는 경사각은 차량이 평지, 오르막길 또는 내리막길을 주행하고 있는지를 판단하는데 이용되며, 측방 검출부(18)의 신호는 차량 주변에 존재하는 타 차량이나 장애물을 확인하여 차량이 좁은 도로를 주행하고 있는지를 판단하는데 이용된다.
상기 경사각 검출부(17)는 차량 내에 설치되어 있는 통상의 경사각 센서가 이용될 수 있다.
상기 측방 검출부(18)는 차량 좌우 양 측방의 장애물을 검출할 수 있도록 차량의 좌우 양측에 각각 설치될 수 있고, 바람직한 실시예로서 차량 좌측 및 우측에 존재하는 장애물과의 거리를 측정할 수 있는 레이더 센서가 될 수 있다.
상기 차속 검출부(차속 센서)(15), 조향 검출부(조향각 센서)(16), 경사각 검출부(경사각 센서)(17), 측방 검출부(레이더 센서)(18)가 출력하는 신호는 통상의 차량 내 다른 센서들과 마찬가지로 CAN 통신을 통해 제어기(20)에 입력되도록 할 수 있다.
한편, 본 발명에 따른 능동 사이드 뷰 시스템은 차량 좌우 양측의 협각 카메라(11,13)와 광각 카메라(12,14)에 의해 촬영된 영상신호를 입력받아 처리하고, 주행조건과 운전조건에 따라 최적 뷰를 판단하여 최적 뷰 영상을 출력하도록 디스플레이 장치(31,32)의 작동을 제어하는 제어기(20)를 포함한다.
또한, 제어기(20)는 도로조건에 따라 광각 카메라(12,14)를 회전시킬 수 있도록 각 카메라에 내장된 모터(33,34)의 구동을 제어한다.
상기 제어기(20)와 카메라 사이에서 제어기(20)가 각 카메라(11~14)에 의해 촬영된 영상신호를 이더넷(Ethernet) 통신 또는 LVDS(Low Voltage Differential Signaling) 영상 통신을 통해 입력받도록 구성될 수 있다.
또한, 상기 제어기(20)와 디스플레이 장치(31,32) 사이에서 제어기(20)가 각 카메라(11~14)로부터 입력되어 소정의 과정을 통해 처리한 영상을 이더넷 통신 또는 LVDS 영상 통신으로 디스플레이 장치(31,32)에 전달하도록 구성될 수 있다.
상기 제어기(20)는 각 카메라(11~14)에서 입력되는 신호를 처리하는 DSP(Digital Signal Processor) 칩 등을 내장한 영상처리부(21), 주행조건 검출부의 검출신호를 입력받아 주행조건을 판단하는 주행조건 판단부(22), 도로조건 검출부의 검출신호를 입력받아 도로조건을 판단하는 도로조건 판단부(23), 및 주행조건 판단부(22)와 도로조건 판단부(23)의 판단 결과에 따라 최적의 영상 뷰를 선택하는 최적뷰 판단부(24)를 포함하여 구성될 수 있다.
상기 주행조건 판단부(22)는 차속 검출부(15)로부터 입력되는 차속 정보로부터 차량이 주행 중인지 아니면 정차 중인지를 판단하게 된다.
또한, 주행조건 판단부(22)는 조향 검출부(16)에서 출력되는 스티어링휠 조작 신호로부터 차량이 곡선 도로를 주행하고 있음을 판단하게 된다.
또한, 도로조건 판단부(23)는 경사각 검출부(17)로부터 입력되는 경사각 정보로부터 차량이 오르막길 또는 내리막길을 주행하고 있는지 아니면 평지를 주행하고 있는지를 판단하게 된다.
또한, 도로조건 판단부(23)는 차량 좌, 우측의 각 측방 검출부(레이더 센서)(18)로부터 입력되는 신호에 기초하여 차량이 좁은 도로를 주행하고 있는지 아니면 넓은 도로를 주행하고 있는지를 판단하게 된다.
최적뷰 판단부(24)는 주행조건 판단부(22)가 차량의 곡선 도로 주행을 판단한 경우 그 판단 결과로부터 회전주행시 운전자의 운전 조작에 도움이 될 수 있도록 광각 카메라(12,14)에 의해 촬영된 광각 뷰(넓은 뷰) 영상을 선택하고, 주행조건 판단부(22)가 곡선 도로가 아닌 직선 도로 주행을 판단한 경우 협각 카메라(11,13)에 의해 촬영된 협각 뷰(좁은 뷰) 영상을 선택하여, 선택된 영상이 디스플레이 장치(31,32)를 통해 출력될 수 있도록 한다.
또한, 최적뷰 판단부(24)는 차량의 좁은 도로 주행을 판단한 경우 그 판단 결과로부터 협각 카메라(11,13)에 의해 촬영된 협각 뷰(좁은 뷰) 영상을 선택하고, 반대로 도로조건 판단부(23)가 차량의 넓은 도로 주행을 판단한 경우 광각 카메라(12,14)에 의해 촬영된 광각 뷰(넓은 뷰) 영상을 선택하여, 선택된 영상이 디스플레이 장치(31,32)를 통해 출력될 수 있도록 한다.
또한, 최적뷰 판단부(24)는 도로조건 판단부(23)가 오르막길 또는 내리막길 주행을 판단한 경우 광각 카메라(12,14)에 의해 촬영된 광각 뷰(넓은 뷰) 영상을 선택하고, 반대로 평지 주행을 판단한 경우 협각 카메라(11,13)에 의해 촬영된 협각 뷰(좁은 뷰) 영상을 선택하여, 선택된 영상이 디스플레이 장치(31,32)를 통해 출력될 수 있도록 한다.
이에 더하여, 제어기(20)는 도로조건 판단부(23)의 판단 결과에 따라 각 카메라 뷰 영역을 설정하는 뷰 영역 설정부(25), 및 상기 영상처리부(21)에 의해 처리된 영상신호를 소정의 시인성 향상 알고리즘에 따라 추가 처리하여 시인성이 향상된 최종의 영상이 획득되도록 하는 시인성 향상부(26)를 포함할 수 있다.
여기서, 뷰 영역 설정부(25)는 도로조건에 따라 광각 카메라(12,14)의 뷰 영역을 설정하도록 구비되는데, 도로조건 판단부(23)의 판단 결과에 따라 광각 카메라(12,14)에 내장된 모터(33,34)를 회전시키기 위한 제어신호를 출력하여 광각 카메라(12,14)의 뷰 영역을 설정해준다.
즉, 광각 카메라(12,14)를 90°각도로 회전시켜, 좌우로 넓게 촬영되는 좌우 광각 뷰 영상(도 1에서 'B' 영역 영상)과, 상하로 넓게 촬영되는 상하 광각 뷰 영상(도 1에서 'C' 영역 영상) 중 어느 하나가 선택적으로 획득되도록 광각 카메라(12,14)의 뷰 영역을 설정해주는 것이다.
예를 들어, 도로조건 판단부(23)의 판단 결과에 따라 차량이 주행하고 있는 도로조건이 평지인 경우 광각 카메라(12,14)의 촬영 범위를 좌우 광각 뷰 영역으로 설정해주고, 만약 도로조건이 오르막길 또는 내리막길인 경우 광각 카메라(12,14)를 90°로 회전시켜 촬영 범위를 상하 광각 뷰 영역으로 설정해준다.
결국, 오르막길 또는 내리막길 주행시 상하 광각 뷰 영상이 디스플레이 장치(31,32)를 통해 출력되도록 하여 후방 뷰가 넓게 보일 수 있도록 함으로써 운전자는 넓은 후방 뷰 확보를 통해 더욱 안전한 운전 조작을 할 수 있게 된다.
상기 시인성 향상부(26)는 주로 야간시 획득되는 어두운 영상신호를 소정의 알고리즘을 통해 처리하여 영상의 시인성을 개선함으로써 디스플레이 장치(31,32)를 통해 출력되는 영상의 내용을 운전자가 보다 명확히 확인할 수 있도록 해주게 된다.
한편, 본 발명에 따른 능동 사이드 뷰 시스템은 카메라에 통해 최종 획득된 영상을 출력하여 표시하기 위한 디스플레이 장치(31,32)를 포함하며, 차량 좌측의 최적 뷰 영상을 출력하는 좌측 디스플레이 장치(31)와, 차량 우측의 최적 뷰 영상을 출력하는 우측 디스플레이 장치(32)를 포함한다.
상기 좌, 우측 디스플레이 장치(31,32)는 제어기(20)에서 선택되고 처리된 최적 뷰 영상을 이더넷 통신 또는 LVDS(LVDS 인터페이스 및 케이블 적용)와 같은 영상 통신 방법을 통해 전달받아 표시(영상 출력)하게 된다.
이와 같이 본 발명에 따른 능동 사이드 뷰 시스템의 구성에 대해 설명하였는바, 도 4는 작동 과정을 나타내는 순서도로서, 이를 참조하여 작동 과정에 대해 설명하면 다음과 같다.
먼저, 운전자가 차량 내 작동 스위치(미도시)를 온(ON) 시키면(S11), 시스템이 온 되어 CAN 통신이 시작되고, 제어기(20)와 좌, 우측의 광각 및 협각 카메라(11~14)가 모두 온 된다(S12,S13).
이어 제어기(20)는 차속 검출부(15)에 의해 검출된 차속으로부터 차량이 주행 중인지를 판단하고(S14), 차량이 주행 중이라면 각 검출부에 의해 취득되는 주행조건 및 도로조건으로부터 곡선 도로, 오르막길, 내리막길, 좁은 도로를 판단한다(S15~18).
이때, 주행 중에 최적 뷰 판단 알고리즘에 따라 조향 검출부(16)의 신호로부터 차량이 곡선 도로를 주행하고 있음을 판단한 경우 좌측 및 우측의 광각 카메라(12,14)에 의해 촬영되는 영상이 디스플레이 장치(31,32)를 통해 표시되도록 한다(S19).
또한, 주행 중에 경사각 검출부(17)의 신호로부터 주행 도로가 오르막길이거나 내리막길인 경우 광각 카메라(12,14)를 90°로 회전시켜 좌, 우측의 광각 카메라(12,14)에 의해 촬영되는 상하 광각 뷰 영상이 디스플레이 장치(31,32)를 통해 표시되도록 한다(S20).
또한, 주행 중에 측방 검출부(18)의 신호로부터 장애물 또는 타 차량을 감지하여 좁은 도로에 진입한 것으로 판단한 경우 협각 카메라(11,13)에 의해 촬영되는 영상이 디스플레이 장치(31,32)를 통해 표시되도록 한다(S21).
이후 차량이 정차하고 작동 스위치가 오프(OFF)되면 CAN 통신, 제어기(20), 카메라(11~14) 등이 오프된다(시스템 오프)(S22,S23).
이상으로 본 발명의 실시예에 대하여 상세하게 설명하였는바, 본 발명의 권리범위가 이에 한정되는 것이 아니며, 다음의 특허청구범위에서 정의하고 있는 본 발명의 기본 개념을 이용한 당 업자의 여러 변형 및 개량 형태 또한 본 발명의 권리범위에 포함된다.
11 : 좌측 협각 카메라
12 : 좌측 광각 카메라
13 : 우측 협각 카메라 14 : 우측 광각 카메라
15 : 차속 검출부 16 : 조향 검출부
17 : 경사각 검출부 18 : 측방 검출부
20 : 제어기 21 : 영상처리부
22 : 주행조건 판단부 23 : 도로조건 판단부
24 : 최적뷰 판단부 25 : 뷰 영역 설정부
26 : 시인성 향상부 31 : 좌측 디스플레이 장치
32 : 우측 디스플레이 장치 33, 34 : 모터
13 : 우측 협각 카메라 14 : 우측 광각 카메라
15 : 차속 검출부 16 : 조향 검출부
17 : 경사각 검출부 18 : 측방 검출부
20 : 제어기 21 : 영상처리부
22 : 주행조건 판단부 23 : 도로조건 판단부
24 : 최적뷰 판단부 25 : 뷰 영역 설정부
26 : 시인성 향상부 31 : 좌측 디스플레이 장치
32 : 우측 디스플레이 장치 33, 34 : 모터
Claims (9)
- 차량 좌우 양측에 설치되어 차량에 근접한 측후방 영역을 촬영하도록 설치되는 협각 카메라와;
차량 좌우 양측에 설치되어 차량으로부터 상기 협각 카메라에 비해 넓은 측후방 영역을 촬영하도록 설치되는 광각 카메라와;
차량의 주행조건을 검출하기 위한 주행조건 검출부와;
차량이 현재 주행하는 도로의 도로조건을 검출하기 위한 도로조건 검출부와;
상기 협각 카메라와 광각 카메라에 의해 촬영된 영상신호를 입력받아 처리하고, 주행조건과 운전조건에 따른 최적 뷰를 판단하여 협각 카메라와 광각 카메라에 의해 촬영된 협각 뷰 영상과 광각 뷰 영상 중 선택된 영상을 전달하는 제어기와;
상기 제어기에 의해 선택된 영상을 출력하여 표시하는 디스플레이 장치를 포함하는 차량의 능동 사이드 뷰 시스템.
- 청구항 1에 있어서,
상기 주행조건 검출부는,
차량의 차속을 검출하기 위한 차속 검출부와;
운전자에 의한 스티어링휠 조작을 감지하는 조향 검출부를 포함하는 것을 특징으로 하는 차량의 능동 사이드 뷰 시스템.
- 청구항 2에 있어서,
제어기는,
상기 차속 검출부에 의해 검출되는 차속 정보와 조향 검출부의 신호로부터 차량이 곡선 도로를 주행하고 있음을 판단한 경우, 좌측 및 우측의 광각 카메라에 의해 촬영되는 영상을 디스플레이 장치에 표시되도록 전달하는 것을 특징으로 하는 차량의 능동 사이드 뷰 시스템.
- 청구항 1에 있어서,
상기 도로조건 검출부는 주행하는 도로상에서 차량 주변의 장애물을 검출하기 위한 측방 검출부를 포함하는 것을 특징으로 하는 차량의 능동 사이드 뷰 시스템.
- 청구항 4에 있어서,
제어기는,
주행조건 검출부의 차속 검출부에 의해 검출되는 차속 정보와 측방 검출부의 신호로부터 차량 주변에 존재하는 타 차량이나 장애물을 확인하여 차량이 좁은 도로를 주행하고 있음을 판단한 경우, 좌측 및 우측의 협각 카메라에 의해 촬영되는 영상을 디스플레이 장치에 표시되도록 전달하는 것을 특징으로 하는 차량의 능동 사이드 뷰 시스템.
- 청구항 1에 있어서,
상기 좌측 및 우측의 광각 카메라는 촬영이 이루어지는 뷰 영역을 도로조건 검출부에 의해 검출되는 도로조건에 따라 변경할 수 있도록 모터에 의해 회전 가능하게 구비되는 것을 특징으로 하는 차량의 능동 사이드 뷰 시스템.
- 청구항 6에 있어서,
상기 도로조건 검출부는 차량의 경사각을 검출하는 경사각 검출부를 포함하는 것을 특징으로 하는 차량의 능동 사이드 뷰 시스템.
- 청구항 6 또는 청구항 7에 있어서,
상기 좌측 및 우측의 광각 카메라는 모터에 의해 회전된 위치에 따라서 좌우로 넓게 촬영되는 좌우 광각 뷰 영상과, 상하로 넓게 촬영되는 상하 광각 뷰 영상이 선택적으로 촬영될 수 있도록 구비되는 것을 특징으로 하는 차량의 능동 사이드 뷰 시스템.
- 청구항 8에 있어서,
제어기는,
주행조건 검출부의 차속 검출부에 의해 검출되는 차속 정보와 도로조건 검출부의 경사각 검출부에 의해 검출되는 차량의 경사각 정보로부터 차량이 오르막길 또는 내리막길을 주행하고 있음을 판단한 경우, 상기 모터를 구동시켜 좌측 및 우측의 광각 카메라를 상하 광각 뷰 영상이 촬영될 수 있도록 회전시키고, 상기 광각 카메라에 의해 촬영된 상하 광각 뷰 영상을 디스플레이 장치에 표시되도록 전달하는 것을 특징으로 하는 차량의 능동 사이드 뷰 시스템.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020140151128A KR20160051321A (ko) | 2014-11-03 | 2014-11-03 | 차량의 능동 사이드 뷰 시스템 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020140151128A KR20160051321A (ko) | 2014-11-03 | 2014-11-03 | 차량의 능동 사이드 뷰 시스템 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20160051321A true KR20160051321A (ko) | 2016-05-11 |
Family
ID=56026104
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020140151128A KR20160051321A (ko) | 2014-11-03 | 2014-11-03 | 차량의 능동 사이드 뷰 시스템 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20160051321A (ko) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180121006A (ko) * | 2017-04-28 | 2018-11-07 | 에스엘 주식회사 | 상용 차량의 주변 감시 장치 |
| CN109109743A (zh) * | 2018-07-17 | 2019-01-01 | 东风商用车有限公司 | 基于摄像的模块化电子外后视镜系统及使用方法、商用车 |
| CN109484300A (zh) * | 2017-09-13 | 2019-03-19 | Trw汽车美国有限责任公司 | 车辆摄像机系统 |
| KR20190043926A (ko) | 2017-10-19 | 2019-04-29 | 지엔에스티주식회사 | 자동차의 사이드뷰 카메라 시스템 |
| KR20190062639A (ko) | 2017-11-24 | 2019-06-07 | 지엔에스티주식회사 | 긴급상황에 대처가 가능한 자동차의 사이드뷰 카메라 시스템 |
| KR20190067578A (ko) * | 2017-12-07 | 2019-06-17 | (주)캠시스 | 오버랩 촬영 영역을 가지는 이종 카메라를 이용한 충돌 경고 장치 및 방법 |
| KR20200053006A (ko) | 2018-10-31 | 2020-05-18 | 지엔에스티주식회사 | 차량용 사이드뷰 시스템 |
| KR102117900B1 (ko) * | 2019-06-25 | 2020-06-03 | 에이에스 주식회사 | 차량의 방향전환에 따른 좌우측 영상 표시 기능을 갖는 블랙박스 |
| KR20200115923A (ko) * | 2019-03-29 | 2020-10-08 | 조승우 | 카메라가 설치된 자동차의 시야확보방법 |
| KR20210144993A (ko) * | 2020-05-21 | 2021-12-01 | 송해성 | 자동차의 주변 영상 및 네비게이션 표시 장치 |
-
2014
- 2014-11-03 KR KR1020140151128A patent/KR20160051321A/ko not_active Application Discontinuation
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180121006A (ko) * | 2017-04-28 | 2018-11-07 | 에스엘 주식회사 | 상용 차량의 주변 감시 장치 |
| CN109484300A (zh) * | 2017-09-13 | 2019-03-19 | Trw汽车美国有限责任公司 | 车辆摄像机系统 |
| KR20190043926A (ko) | 2017-10-19 | 2019-04-29 | 지엔에스티주식회사 | 자동차의 사이드뷰 카메라 시스템 |
| KR20190062639A (ko) | 2017-11-24 | 2019-06-07 | 지엔에스티주식회사 | 긴급상황에 대처가 가능한 자동차의 사이드뷰 카메라 시스템 |
| KR20190067578A (ko) * | 2017-12-07 | 2019-06-17 | (주)캠시스 | 오버랩 촬영 영역을 가지는 이종 카메라를 이용한 충돌 경고 장치 및 방법 |
| CN109109743A (zh) * | 2018-07-17 | 2019-01-01 | 东风商用车有限公司 | 基于摄像的模块化电子外后视镜系统及使用方法、商用车 |
| KR20200053006A (ko) | 2018-10-31 | 2020-05-18 | 지엔에스티주식회사 | 차량용 사이드뷰 시스템 |
| KR20200115923A (ko) * | 2019-03-29 | 2020-10-08 | 조승우 | 카메라가 설치된 자동차의 시야확보방법 |
| KR102117900B1 (ko) * | 2019-06-25 | 2020-06-03 | 에이에스 주식회사 | 차량의 방향전환에 따른 좌우측 영상 표시 기능을 갖는 블랙박스 |
| KR20210144993A (ko) * | 2020-05-21 | 2021-12-01 | 송해성 | 자동차의 주변 영상 및 네비게이션 표시 장치 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20160051321A (ko) | 차량의 능동 사이드 뷰 시스템 | |
| US20230202563A1 (en) | Vehicular trailer guidance system | |
| US10147323B2 (en) | Driver assistance system with path clearance determination | |
| KR101373616B1 (ko) | 차량용 사이드 카메라 시스템 및 그 제어방법 | |
| US20190064831A1 (en) | Vehicle and trailer maneuver assist system | |
| JP5099451B2 (ja) | 車両周辺確認装置 | |
| US8694195B2 (en) | Motor vehicle having a wheel-view camera and method for controlling a wheel-view camera system | |
| US8218007B2 (en) | Camera system for a vehicle and method for controlling a camera system | |
| US7190259B2 (en) | Surrounding surveillance apparatus and mobile body | |
| US10462354B2 (en) | Vehicle control system utilizing multi-camera module | |
| US8477191B2 (en) | On-vehicle image pickup apparatus | |
| US20060178787A1 (en) | Rear obstacle avoidance system for vehicle | |
| US20130155236A1 (en) | Camera-mirror system for motor vehicle | |
| EP3466763B1 (en) | Vehicle monitor system | |
| US8537221B2 (en) | Lane change control system | |
| JP2007221200A (ja) | 車両周辺監視装置 | |
| KR102045088B1 (ko) | 영상 표시 방법 및 이를 위한 위한 장치 | |
| CN113165667A (zh) | 调节摄像机的视角的车辆用全景监控系统及其方法 | |
| US11292387B2 (en) | Towing assistance apparatus | |
| JP2010006129A (ja) | 車両後方情報表示装置および車両後方情報表示方法 | |
| US20160129838A1 (en) | Wide angle rear and side view monitor | |
| US20040212676A1 (en) | Optical detection system for vehicles | |
| WO2023284748A1 (zh) | 一种辅助驾驶系统及车辆 | |
| KR102010407B1 (ko) | 스마트 리어뷰 시스템 | |
| CN111409554A (zh) | 一种车辆前方通过性检测系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E90F | Notification of reason for final refusal | ||
| E601 | Decision to refuse application |