KR20150129818A - 정확한 위치 정보의 디바이스-간 전달 - Google Patents
정확한 위치 정보의 디바이스-간 전달 Download PDFInfo
- Publication number
- KR20150129818A KR20150129818A KR1020157028724A KR20157028724A KR20150129818A KR 20150129818 A KR20150129818 A KR 20150129818A KR 1020157028724 A KR1020157028724 A KR 1020157028724A KR 20157028724 A KR20157028724 A KR 20157028724A KR 20150129818 A KR20150129818 A KR 20150129818A
- Authority
- KR
- South Korea
- Prior art keywords
- location
- determining
- devices
- poor positioning
- uncertainty
- Prior art date
Links
Images



Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/023—Services making use of location information using mutual or relative location information between multiple location based services [LBS] targets or of distance thresholds
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/0009—Transmission of position information to remote stations
- G01S5/0072—Transmission between mobile stations, e.g. anti-collision systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0205—Details
- G01S5/0244—Accuracy or reliability of position solution or of measurements contributing thereto
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0284—Relative positioning
-
- H04W4/008—
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/80—Services using short range communication, e.g. near-field communication [NFC], radio-frequency identification [RFID] or low energy communication
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Mobile Radio Communication Systems (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Telephone Function (AREA)
- Telephonic Communication Services (AREA)
Abstract
본 개시는 하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하는 것에 관련된다. 제 1 디바이스의 제 1 위치 및 제 1 위치 불확실성은 제 1 디바이스로부터 수신되고, 제 1 위치 불확실성이 UE의 위치 불확실성보다 적은지 아닌지에 대한 결정이 이루어지고, 제 1 위치 불확실성이 UE의 위치 불확실성보다 적은 경우, UE의 위치는 제 1 디바이스의 위치 및 제 1 디바이스에 대한 거리에 기초하여 결정된다.
Description
[0001] 본 개시의
양상들은 모바일 디바이스들 사이의 정확한 위치 정보의 전달에 관한 것이다.
[0002] 셀 폰들, 스마트 폰들, 태블릿 컴퓨터들, PDA(personal digital assistant)들 등과 같은 현대의 사용자 디바이스들은 전형적으로, 일부 형태의 다변측량(multilateration) 또는 삼변측량(trilateration)을 이용하여 하나 또는 둘 이상의 라디오 송신기들로부터 수신된 신호들에 기초하여 이들의 위치를 정확하게 결정할 수 있다. 송신기들은 GNSS(global navigation satellite system), 이를테면, GPS(global positioning system), 또는 지상 RF(radio frequency) 송신기들, 이를테면, 셀룰러 기지국들, 로컬 무선 네트워크 액세스 포인트들 등에서의 위성들일 수 있다. 로컬 무선 네트워크 액세스 포인트들은 WLAN(wireless local area network) 액세스 포인트들, WiFi 액세스 포인트들, 펨코셀들, Bluetooth® 송신기들, 근거리 통신 송신기들 등을 포함할 수 있다.
[0003] 빌딩 또는 다른 폐쇄형(enclosed) 구조, 이를테면, 지하철 시스템 내의 정확한 위치를 유지하는 것은, 예를 들어, 크라우드 소싱(crowd sourcing)을 이용하여 이미 정확하게 포지셔닝되었던 로컬 무선 네트워크 액세스 포인트들의 부재에서 난제(challenging)일 수 있다. 이러한 환경에서, 위성 신호들의 과도한 감쇠로 인한 GNSS 또는 A-GNSS(assisted GNSS)를 이용하는 것이 불가능할 수 있다. 실외 매크로 셀들로부터의 신호들을 이용하는 포지셔닝은 매우 제한된 빌딩 관통(penetration)으로 인하여 어려울 수 있다. 구조의 외부에서 획득된 최후의 정확한 위치 추정을 업데이트함으로써 사용자 디바이스가 먼저 폐쇄형 구조에 진입할 때 위치를 정확하게 트래킹하기 위해 (내부 센서들, 이를테면, 가속도계들, 자력계들, 자이로스코프들 등을 이용하는) 관성 네비게이션이 이용될 수 있지만, 센서 측정들에서의 작은 에러들의 점진적 누적은 결국, 많은 용도들에 대해 임의의 위치 추정을 매우 부정확하게 렌더링한다.
[0004] 본 개시의 양상들은 하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하는 것에 관련된다. 하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 UE의 위치를 결정하기 위한 방법은, 제 1 디바이스로부터 제 1 디바이스의 제 1 위치 및 제 1 위치 불확실성을 수신하는 단계, 제 1 위치 불확실성이 UE의 위치 불확실성보다 적은지 아닌지를 결정하는 단계 및 제 1 위치 불확실성이 상기 UE의 위치 불확실성보다 적은 경우, 제 1 디바이스의 위치 및 제 1 디바이스에 대한 거리에 기초하여 UE의 위치를 결정하는 단계를 포함한다.
[0005] 하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 UE의 위치를 결정하기 위한 장치는, 제 1 디바이스로부터 제 1 디바이스의 제 1 위치 및 제 1 위치 불확실성을 수신하도록 구성되는 로직, 제 1 위치 불확실성이 UE의 위치 불확실성보다 적은지 아닌지를 결정하도록 구성되는 로직, 및 제 1 위치 불확실성이 UE의 위치 불확실성보다 적은 경우, 제 1 디바이스의 위치 및 제 1 디바이스에 대한 거리에 기초하여 UE의 위치를 결정하도록 구성되는 로직을 포함한다.
[0006] 하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 UE의 위치를 결정하기 위한 장치는, 제 1 디바이스로부터 상기 제 1 디바이스의 제 1 위치 및 제 1 위치 불확실성을 수신하기 위한 수단, 제 1 위치 불확실성이 UE의 위치 불확실성보다 적은지 아닌지를 결정하기 위한 수단 및 제 1 위치 불확실성이 UE의 위치 불확실성보다 적은 경우, 제 1 디바이스의 위치 및 제 1 디바이스에 대한 거리에 기초하여 UE의 위치를 결정하기 위한 수단을 포함한다.
[0007] 하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 UE의 위치를 결정하기 위한 비-일시적 컴퓨터 판독가능한 매체는, 제 1 디바이스로부터 제 1 디바이스의 제 1 위치 및 제 1 위치 불확실성을 수신하기 위한 적어도 하나의 명령, 제 1 위치 불확실성이 UE의 위치 불확실성보다 적은지 아닌지를 결정하기 위한 적어도 하나의 명령 및 제 1 위치 불확실성이 UE의 위치 불확실성보다 적은 경우, 제 1 디바이스의 위치 및 제 1 디바이스에 대한 거리에 기초하여 UE의 위치를 결정하기 위한 적어도 하나의 명령을 포함한다.
[0008] 본 개시의 양상들의 더 완전한 인식 및 이의 많은 수반되는 이점들은, 이들이 본 개시의 제한이 아닌 오직 예시를 위해 제시되는 첨부한 도면들과 관련하여 고려될 때 다음의 상세한 설명에 대한 참조에 의해 더 잘 이해되므로 쉽게 획득될 것이다.
[0009] 도 1은 본 개시의 양상에 따른 무선 통신 시스템의 하이-레벨 시스템 아키텍처를 예시한다.
[0010] 도 2는 본 개시의 양상들에 따른 사용자 장비(UE)들의 예들을 예시한다.
[0011] 도 3은 본 개시의 양상에 따라 기능을 수행하도록 구성되는 로직을 포함하는 통신 디바이스를 예시한다.
[0012] 도 4는 본 개시의 다양한 양상들에 따른 예시적 서버를 예시한다.
[0013] 도 5는 양호한 포지셔닝 환경 및 열악한 포지셔닝 환경을 예시한다.
[0014] 도 6은 하나 또는 둘 이상의 다른 UE들의 위치들에 기초하여 열악한 포지셔닝 환경에서 UE의 위치를 결정하는 예시적 흐름을 예시한다.
[0009] 도 1은 본 개시의 양상에 따른 무선 통신 시스템의 하이-레벨 시스템 아키텍처를 예시한다.
[0010] 도 2는 본 개시의 양상들에 따른 사용자 장비(UE)들의 예들을 예시한다.
[0011] 도 3은 본 개시의 양상에 따라 기능을 수행하도록 구성되는 로직을 포함하는 통신 디바이스를 예시한다.
[0012] 도 4는 본 개시의 다양한 양상들에 따른 예시적 서버를 예시한다.
[0013] 도 5는 양호한 포지셔닝 환경 및 열악한 포지셔닝 환경을 예시한다.
[0014] 도 6은 하나 또는 둘 이상의 다른 UE들의 위치들에 기초하여 열악한 포지셔닝 환경에서 UE의 위치를 결정하는 예시적 흐름을 예시한다.
[0015] 다양한 양상들은 다음의 설명 및 관련 도면들에서 개시된다. 대안적 양상들은 본 개시의 범위로부터 벗어나지 않으면서 고안될 수 있다. 추가적으로, 본 개시의 공지된 엘리먼트들은 본 개시의 관련 세부사항들을 모호하게 하지 않도록 상세하게 설명되지 않거나 또는 생략될 것이다.
[0016] "예시적" 및/또는 "예"라는 단어들은 본원에서 "예, 예시 또는 예증으로서 제공되는"의 의미로 이용된다. "예시적" 및/또는 "예"로서 본원에 설명되는 임의의 양상이 반드시 다른 양상들보다 선호되거나 또는 유리한 것으로 해석되는 것은 아니다. 마찬가지로, "본 개시의 양상들"이라는 용어는, 본 개시의 모든 양상들이 논의되는 특징, 이점 또는 동작 모드를 포함하는 것을 요구하지 않는다.
[0017] 추가로, 많은 양상들이, 예를 들어, 컴퓨팅 디바이스의 엘리먼트들에 의해 수행될 동작들의 시퀀스들에 관하여 설명된다. 본원에 설명되는 다양한 동작들이 특정 회로들(예를 들어, ASIC(application specific integrated circuit)들)에 의해, 하나 또는 둘 이상의 프로세서들에 의해 실행되는 프로그램 명령들에 의해 또는 이 둘의 결합에 의해 수행될 수 있다는 것이 인식될 것이다. 추가적으로, 본원에 설명되는 이러한 동작들의 시퀀스는, 실행 시에, 연관된 프로세서로 하여금 본원에 설명되는 기능을 수행하게 할 컴퓨터 명령들의 대응하는 세트가 저장된 임의의 형태의 컴퓨터 판독가능한 저장 매체의 내에서 전적으로 구현되도록 고려될 수 있다. 따라서, 본 개시의 다양한 양상들은 다수의 상이한 형태들로 구현될 수 있으며, 이들 모두는 청구되는 대상의 범위 내에 있는 것으로 참작된다. 추가적으로, 본원에 설명되는 양상들 각각에 대해, 임의의 이러한 양상들의 대응하는 형태는 예를 들어, 설명되는 동작을 수행하도록 "구성되는 로직"으로서 본원에 설명될 수 있다.
[0018] 본원에 사용자 장비(UE)로 지칭되는 클라이언트 디바이스는 이동식 또는 고정식일 수 있으며, RAN(radio access network)과 통신할 수 있다. 본원에서 이용되는 바와 같이, "UE"라는 용어는 "액세스 단말" 또는 "AT", "무선 디바이스", "가입자 디바이스", "가입자 단말", "가입자국", "사용자 단말" 또는 UT, "모바일 단말", "이동국" 또는 이들의 변형들로서 상호 교환가능하게 지칭될 수 있다. 일반적으로, UE들은 UE들이 인터넷과 같은 외부 네트워크들과 연결될 수 있게 하는 코어 네트워크를 통해 그리고 RAN을 통해 코어 네트워크와 통신할 수 있다. 물론, 코어 네트워크 및/또는 인터넷에 연결하는 다른 메커니즘들은 또한, 이를테면, 유선 액세스 네트워크들, WiFi 네트워크들(예를 들어, IEEE 802.11 등) 등을 통해, UE들에 대해 가능하다. UE들은 PC 카드들, 컴팩트 플래시 디바이스들, 외부 또는 내부 모뎀들, 무선 또는 유선 폰들, 셀룰러 폰들, 스마트폰들, 태블릿 컴퓨터들, 랩탑들 등을 포함하는(그러나, 이들에 제한되는 것은 아님) 다수의 타입들의 디바이스들 중 임의의 것에 의해 구현될 수 있다. UE들이 신호들을 RAN에 전송할 수 있게 하는 통신 링크는 업링크 채널(예를 들어, 역방향 트래픽 채널, 역방향 제어 채널, 액세스 채널 등)이라 칭해진다. RAN이 신호들을 UE들에 전송할 수 있게 하는 통신 링크는 다운링크 또는 순방향 링크 채널(예를 들어, 페이징 채널, 제어 채널, 브로드캐스트 채널, 순방향 트래픽 채널 등)이라 칭해진다. 본원에서 이용되는 바와 같이, TCH(traffic channel)라는 용어는 업링크/역방향 또는 다운링크/순방향 트래픽 채널을 지칭할 수 있다.
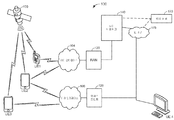
[0019] 도 1은 본 개시의 양상에 따른 무선 통신 시스템(100)의 하이-레벨 시스템 아키텍처를 예시한다. 무선 통신 시스템(100)은 UE들 1 내지 4를 포함한다. UE들 1 내지 4는 셀룰러 전화들, 스마트 폰들, 태블릿 컴퓨터들, PDA(personal digital assistant)들, 페이저들, 랩탑 컴퓨터들, 데스크탑 컴퓨터들 등을 포함할 수 있다. 예를 들어, 도 1에서, UE 1은 셀룰러 폰으로서 예시되고, UE들 2 및 3은 스마트 폰들로서 예시되며, UE 4는 데스크탑 컴퓨터로서 예시된다.
[0020] 도 1을 참조하면, UE들 1 내지 4는 에어 인터페이스들(104, 106) 및/또는 다이렉트 유선 연결로서 도 1에 도시된 물리 통신 인터페이스 또는 계층 상에서 액세스 네트워크(예를 들어, RAN(120), 액세스 포인트(125) 등)와 통신하도록 구성된다. 에어 인터페이스(104)는 주어진 셀룰러 통신 프로토콜(예를 들어, CDMA(Code Division Multiple Access), EV-DO(Evolution-Data Optimized), eHRPD(Evolved High Rate Packet Data), GSM(Global System of Mobile Communication), EDGE(Enhanced Data rates for GSM Evolution), WCDMA(Wideband CDMA), LTE(Long-Term Evolution) 등)에 따를 수 있는 반면, 에어 인터페이스(106)는 WLAN(Wireless Local Area Network) 프로토콜(예를 들어, IEEE 802.11)에 따를 수 있다. GSM, EDGE, WCDMA 및 LTE는 3GPP(3rd Generation Partnership Project)로서 알려져 있는 기구에 의해 정의되는 라디오 기술들이다. CDMA, EV-DO 및 eHRPD는 3GPP2(3rd Generation Partnership Project 2)로서 알려져 있는 기구에 의해 정의되는 라디오 기술들이다. RAN(120)은 에어 인터페이스(104)와 같은 에어 인터페이스들 상에서 UE들을 서빙하는 복수의 액세스 포인트들을 포함한다. RAN(120)은 UMTS(Universal Mobile Telecommunications System) RAN, LTE RAN 등일 수 있다. RAN(120) 내의 액세스 포인트들은 액세스 노드들 또는 AN들, 액세스 포인트들 또는 AP들, 기지국들 또는 BS들, Node B들, eNode B들 등으로 지칭될 수 있다. 이 액세스 포인트들은 지상 액세스 포인트들(또는 그라운드 스테이션들), 또는 위성 액세스 포인트들, 이를테면, 위성(130)일 수 있다. RAN(120)은 다양한 기능들을 수행할 수 있는 코어 네트워크(140)에 (무선 또는 유선 수단에 의해) 연결(RAN(120)에 의해 서빙되는 UE들과, RAN(120) 또는 상이한 RAN에 의해 서빙되는 다른 UE들 사이의 CS(circuit switched) 및 PS(packet switched) 호들 및 세션들에의 연결을 포함)하거나 또는 전체적으로 상이한 네트워크에 연결하도록 구성되며, 또한 인터넷(175)과 같은 외부 네트워크들과 PS(packet-switched) 데이터의 교환을 중재할 수 있다. 인터넷(175)은 다수의 라우팅 에이전트들 및 프로세싱 에이전트들(편의상 도 1에 도시되지 않음)을 포함한다. 도 1에서, UE 4는 인터넷(175)(즉, 이를테면, Ethernet 연결 또는 WiFi 또는 802.11-기반 네트워크 상에서 코어 네트워크(140)로부터 분리됨)에 직접적으로 연결하는 것으로 도시된다. 인터넷(175)은, 그에 의해, 코어 네트워크(140)를 통해 UE 4와 UE들 1 내지 3 사이의 패킷-스위칭된 데이터 통신들을 라우팅하도록 기능할 수 있다. 또한, RAN(120)으로부터 분리된 액세스 포인트(125)가 도 1에 도시된다. 액세스 포인트(125)는 (예를 들어, FiOS, 케이블 모뎀 등과 같은 광학 통신 시스템을 통해) 코어 네트워크(140)와는 독립적인 인터넷(175)에 연결될 수 있다. 에어 인터페이스(106)는 예에서 로컬 무선 연결, 이를테면, IEEE 802.11 상에서 UE 2 또는 UE 3을 서빙할 수 있다. UE 4는 인터넷(175)으로의 유선 연결, 이를테면, 모뎀 또는 라우터에의 직접 연결을 갖는 데스크탑 컴퓨터로서 도시된다. 예에서, UE 4는 (예를 들어, 유선 및 무선 연결성 둘 모두를 갖는 WiFi 라우터에 대해) 액세스 포인트(125)를 통해 인터넷(175)에 연결할 수 있다.
[0021] 도 1을 참조하면, 위치 서버(170)는 인터넷(175), 코어 네트워크(140) 또는 둘 모두에 연결되는 것으로 도시된다. 위치 서버(170)는 복수의 구조적으로 분리된 서버들로서 구현될 수 있거나, 대안적으로, 단일 서버에 대응할 수 있다.
[0022] UE들 1 내지 3은 이들의 포지션들을 결정하기 위해 하나 또는 둘 이상의 위성들(130), RAN(120) 및/또는 액세스 포인트(125) 및 하나 또는 둘 이상의 다른 유사한 액세스 포인트들로부터 수신된 라디오 신호들을 측정할 수 있다. 측정되는 라디오 신호들은 주로 UE들 사이의 통신을 지원하는 것으로 의도될 수 있거나, 주로 UE들의 포지셔닝을 지원하는 것으로 의도될 수 있거나, 이 둘 모두의 목적들을 서빙할 수 있다. 도 1의 예에서, UE 1은 위성(들)(130) 및/또는 RAN(120)로부터 수신된 라디오 신호들에 기초하여 그것의 포지션을 결정할 수 있고, UE 2는 위성(들)(130), RAN(120) 및/또는 액세스 포인트(125)로부터 수신된 라디오 신호들에 기초하여 그것의 포지션을 결정할 수 있으며, UE 3은 위성(들)(130) 및/또는 액세스 포인트(125)로부터 수신된 신호들에 기초하여 그것의 포지션을 결정할 수 있다. 이러한 포지션 결정은, 독립형 GNSS, A-GNSS(Assisted GNSS), AFLT(advanced forward link trilateration), OTDOA(observed time difference of arrival), E-CID(Enhanced Cell ID), WiFi-기반 포지셔닝 등과 같은 기존 포지션 방법들을 이용할 수 있다. 이 포지셔닝 방법들은 (예를 들어, RAN(120), 액세스 포인트(125) 및/또는 위성(들)(130)으로부터) 수신된 라디오 신호들의 측정들(예를 들어, 신호 타이밍, 신호 방향 및/또는 신호 강도)을 수행하고, 이 측정들로부터의 포지션 추정을 컴퓨팅하는 UE들 1, 2 및 3에 의해 지원될 수 있다. 일부 양상들에서, 보조 데이터는 라디오 신호들의 측정을 보조(예를 들어, 라디오 신호들의 더 빠르고 더 정확한 포착을 인에이블)하기 위해 네트워크(예를 들어, RAN(120), 코어 네트워크(140)) 또는 위치 서버(예를 들어, 위치 서버(170))에 의해 UE들에 제공될 수 있다. 일부 양상들에서, 네트워크(예를 들어, RAN(120), 코어 네트워크(140)) 또는 위치 서버(예를 들어, 위치 서버(170))는 UE로부터 네트워크 또는 위치 서버에 전달되는 라디오 신호 측정들에 기초하여 UE(예를 들어, UE 1 또는 UE 2)에 대한 위치 추정을 계산할 수 있으며, 계산된 위치 추정을 UE에 리턴할 수 있다.
[0023] 무선 통신 시스템(100)은 UE가 위에서 설명된 바와 같은 위성, 셀룰러 및/또는 로컬 무선 네트워크 포지셔닝 시스템들로부터 그것의 포지션을 정확하게 결정할 수 있기 때문에, "양호한" 포지셔닝 환경 또는 단지 "양호한 환경"의 예이다. 양호한 환경은 전형적으로 실외 환경이고, 여기서, UE는 작은 감쇠를 갖거나 감쇠를 갖지 않는 포지셔닝 신호들을 수신할 수 있다.
[0024] 본 개시에서, "포지션" 및 "위치"라는 용어들은 상호교환가능하게 이용되며, 절대 지리적 포지션 또는 다른 포인트들과 관련된 포지션을 지칭할 수 있다는 점이 주목된다.
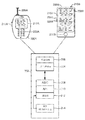
[0025] 도 2는 본 개시의 양상들에 따른 UE들의 예들을 예시한다. 도 2를 참조하면, UE(200A)는 셀룰러 전화로서 예시되고, UE(200B)는 터치스크린 디바이스(예를 들어, 스마트 폰, 태블릿 컴퓨터 등)로서 예시된다. 도 2에 도시된 바와 같이, UE(200A)의 외부 케이싱(casing)은 당해 기술 분야에 공지된 바와 같이, 다른 컴포넌트들 중에서도, 안테나(205A), 디스플레이(210A), 적어도 하나의 버튼(215A)(예를 들어, PTT 버튼, 전력 버튼, 볼륨 제어 버튼 등) 및 키패드(220A)로 구성된다. 또한, UE(200B)의 외부 케이싱은, 당해 기술 분야에 공지된 바와 같이, 다른 컴포넌트들 중에서도, 터치스크린 디스플레이(205B), 주변 버튼들(210B, 215B, 220B 및 225B)(예를 들어, 전력 제어 버튼, 볼륨 또는 진동 제어 버튼, 에어플레인 모드 토글 버튼 등), 적어도 하나의 프론트-패널 버튼(230B)(예를 들어, 홈 버튼 등)으로 구성된다. UE(200B)의 부분으로서 명시적으로 도시되지는 않지만, UE(200B)는 WiFi 안테나들, 셀룰러 안테나들, SPS(satellite position system) 안테나들(예를 들어, GPS(global positioning system) 안테나들) 등을 포함하는(그러나, 이들에 제한되는 것은 아님), UE(200B)의 외부 케이싱으로 구축되는 하나 또는 둘 이상의 외부 안테나들 및/또는 하나 또는 둘 이상의 통합된 안테나들을 포함할 수 있다.
[0026] UE들(200A 및 200B)과 같은 UE들의 내부 컴포넌트들이 서로 다른 하드웨어 구성들로 구현될 수 있지만, 내부 하드웨어 컴포넌트들에 대한 기본 하이-레벨 UE 구성은 도 2의 플랫폼(202)으로서 도시된다. 플랫폼(202)은 코어 네트워크(140), 인터넷(175) 및/또는 다른 원격 서버들 및 네트워크들(예를 들어, 위치 서버(170), 웹 URL들 등)로부터 궁극적으로 나올 수 있는, RAN(120)으로부터 송신되는 소프트웨어 애플리케이션들, 데이터 및/또는 커맨드들을 수신 및 실행할 수 있다. 플랫폼(202)은 또한, RAN 상호작용 없이 로컬로 저장된 애플리케이션들을 독립적으로 실행할 수 있다. 플랫폼(202)은 관성 네비게이션에 대해 이용될 수 있는 내부 센서들(204), 이를테면, 가속도계들, 자력계들, 자이로스코프들, 기압계들, 온도계들 등을 포함할 수 있다. 예를 들어, 가속도계들은 선형 가속도 및 속도를 측정하기 위해 이용될 수 있고, 자력계들은 방향 및 배향을 측정하기 위해 이용될 수 있으며, 자이로스코프들은 각 운동 및 방향을 측정하기 위해 이용될 수 있고, 기압계들 및/또는 온도계들은 고도 및 환경의 변화들을 측정하기 위해 이용될 수 있다. 플랫폼(202)은 ASIC(application specific integrated circuit)(208)에 동작가능하게 커플링된 트랜시버(206), 또는 다른 프로세서, 마이크로프로세서, 로직 회로 또는 다른 데이터 프로세싱 디바이스를 더 포함할 수 있다. ASIC(208) 또는 다른 프로세서는 무선 디바이스의 메모리(212)에서 임의의 상주 프로그램들 또는 애플리케이션들과 인터페이싱하는 API(application programming interface)(210) 계층을 실행한다. 메모리(212)는 ROM(read-only memory) 또는 RAM(random-access memory), EEPROM(electrically erasable programmable ROM), 플래시 카드들 또는 컴퓨터 플랫폼들에 공통적인 임의의 메모리로 구성될 수 있다. 플랫폼(202)은 또한, 메모리(212)에서 활성적으로 이용되지 않는 애플리케이션들뿐만 아니라, 다른 데이터를 저장하는 로컬 데이터베이스(214)를 포함할 수 있다. 로컬 데이터베이스(214)는 전형적으로 플래시 메모리 셀이지만, 자기 매체들, EEPROM, 광 매체들, 테이프, 소프트 또는 하드 디스크 등과 같은, 당해 기술 분야에 공지된 바와 같은 임의의 2차 저장 디바이스일 수 있다.
[0027] 따라서, 본 개시의 양상은 본원에 설명된 기능들을 수행하기 위한 능력을 포함하는 UE(예를 들어, UE(200A, 200B) 등)를 포함할 수 있다. 당업자들에 의해 인식될 바와 같이, 다양한 로직 엘리먼트들은 본원에 개시된 기능을 달성하기 위해 이산 엘리먼트들, 프로세서 상에서 실행되는 소프트웨어 모듈들 또는 소프트웨어와 하드웨어의 임의의 결합으로 구현될 수 있다. 예를 들어, ASIC(208), 메모리(212), API(210) 및 로컬 데이터베이스(214)는 모두 본원에 개시된 다양한 기능들을 로딩, 저장 및 실행하기 위해 협력적으로 이용될 수 있고, 따라서, 이 기능들을 수행하기 위한 로직은 다양한 엘리먼트들 상에 분산될 수 있다. 대안적으로, 기능은 하나의 이산 컴포넌트로 통합될 수 있다. 따라서, 도 2의 UE들(200A 및 200B)의 특징들은 단지 예시로서 고려될 것이고, 본 개시는 예시된 특징들 또는 배열에 제한되지 않는다.
[0028] UE들(200A 및/또는 200B)과 RAN(120) 사이의 무선 통신은 CDMA, WCDMA, TDMA(time division multiple access), FDMA(frequency division multiple access), OFDM(Orthogonal Frequency Division Multiplexing), GSM, 또는 무선 통신 네트워크 또는 데이터 통신 네트워크에서 이용될 수 있는 다른 프로토콜들과 같은 서로 다른 기술들에 기초할 수 있다. 위의 내용에 논의되고, 당해 기술 분야에 공지된 바와 같이, 음성 송신 및/또는 데이터는 다양한 네트워크들 및 구성들을 이용하여 RAN으로부터 UE들에 송신될 수 있다. 따라서, 본원에 제공된 예시들은 본 개시의 양상들을 제한하는 것으로 의도되지 않으며, 단지 본 개시의 다양한 양상들의 설명을 돕기 위한 것이다.
[0029] 도 3은 기능을 수행하도록 구성되는 로직을 포함하는 통신 디바이스(300)를 예시한다. 통신 디바이스(300)는 UE들(200A 또는 200B), RAN(120)의 임의의 컴포넌트, 코어 네트워크(140)의 임의의 컴포넌트, 코어 네트워크(140) 및/또는 인터넷(175)(예를 들어, 위치 서버(170))과 커플링된 임의의 컴포넌트들 등을 포함하는(그러나, 이들에 제한되는 것은 아님) 위에서 기술된 통신 디바이스들 중 임의의 것에 대응할 수 있다. 따라서, 통신 디바이스(300)는 도 1의 무선 통신 시스템(100) 상에서 하나 또는 둘 이상의 다른 엔티티들과 통신하도록(또는 이들과의 통신을 가능하게 하도록) 구성되는 임의의 전자 디바이스에 대응할 수 있다.
[0030] 도 3을 참조하면, 통신 디바이스(300)는 정보를 수신 및/또는 송신하도록 구성되는 로직(305)을 포함한다. 예에서, 통신 디바이스(300)가 무선 통신 디바이스(예를 들어, UE(200A 또는 200B))에 대응하는 경우, 정보를 수신 및/또는 송신하도록 구성되는 로직(305)은 무선 트랜시버 및 연관 하드웨어(예를 들어, RF 안테나, 모뎀, 변조기 및/또는 복조기 등)와 같은 무선 통신 인테페이스(예를 들어, Bluetooth, WiFi, 2G, CDMA, WCDMA, 3G, 4G, LTE 등)를 포함할 수 있다. 또 다른 예에서, 정보를 수신 및/또는 송신하도록 구성되는 로직(305)은 유선 통신 인터페이스(예를 들어, 직렬 연결, USB 또는 Firewire 연결, 인터넷(175)이 액세스될 수 있게 하는 Ethernet 연결 등)에 대응할 수 있다. 따라서, 통신 디바이스(300)가 일부 타입의 네트워크-기반 서버(예를 들어, 위치 서버(170))에 대응하는 경우, 정보를 수신 및/또는 송신하도록 구성되는 로직(305)은, 예에서, 네트워크-기반 서버를 Ethernet 프로토콜을 통해 다른 통신 엔티티들에 연결하는 Ethernet 카드에 대응할 수 있다. 추가 예에서, 정보를 수신 및/또는 송신하도록 구성되는 로직(305)은 통신 디바이스(300)가 그것의 로컬 환경을 모니터링할 수 있게 하는 감지 또는 측정 하드웨어(예를 들어, 가속도계, 온도 센서, 광 센서, 로컬 RF 신호들을 모니터링하기 위한 안테나 등)를 포함할 수 있다. 정보를 수신 및/또는 송신하도록 구성되는 로직(305)은 또한, 제 1 디바이스로부터 제 1 디바이스의 제 1 위치 및 제 1 위치 불확실성을 수신하도록 구성되는 로직을 포함할 수 있다. 정보를 수신 및/또는 송신하도록 구성되는 로직(305)은 또한, 실행될 때, 정보를 수신 및/또는 송신하도록 구성되는 로직(305)의 연관된 하드웨어가 그것의 수신 및/또는 송신 기능(들)을 수행하게 허용하는 소프트웨어를 포함할 수 있다. 그러나, 정보를 수신 및/또는 송신하도록 구성되는 로직(305)은 소프트웨어에만 대응하지 않고, 정보를 수신 및/또는 송신하도록 구성되는 로직(305)은 그것의 기능을 달성하기 위해 하드웨어에 적어도 부분적으로 의존한다.
[0031] 도 3을 참조하면, 통신 디바이스(300)는 정보를 프로세싱하도록 구성되는 로직(310)을 더 포함한다. 예에서, 정보를 프로세싱하도록 구성되는 로직(310)은 적어도 프로세서를 포함할 수 있다. 정보를 프로세싱하도록 구성되는 로직(310)에 의해 수행될 수 있는 프로세싱의 타입들의 예시적 구현들은 결정들을 수행하는 것, 연결들을 설정하는 것, 서로 다른 정보 옵션들 사이에서 선택들을 수행하는 것, 데이터와 관련된 평가들을 수행하는 것, 측정 동작들을 수행하기 위해 통신 디바이스(300)에 커플링된 센서들과 상호작용하는 것, 하나의 포맷으로부터 또 다른 포맷으로(예를 들어, .wmv to .avi 등과 같이 서로 다른 프로토콜들 간에) 정보를 변환시키는 것 등을 포함하지만, 이들에 제한되는 것은 아니다. 예를 들어, 정보를 프로세싱하도록 구성되는 로직(310)은 제 1 위치 불확실성이 통신 디바이스(300)의 위치 불확실성보다 적은지 아닌지를 결정하도록 구성되는 로직 및 제 1 위치 불확실성이 통신 디바이스(300)의 위치 불확실성보다 적은 경우, 제 1 디바이스의 위치 및 제 1 디바이스에 대한 거리에 기초하여 통신 디바이스(300)의 위치를 결정하도록 구성되는 로직을 포함할 수 있다. 정보를 프로세싱하도록 구성되는 로직(310)에 포함되는 프로세서는 범용 프로세서, DSP(digital signal processor), ASIC, FPGA(field programmable gate array) 또는 다른 프로그래머블 로직 디바이스, 이산 게이트 또는 트랜지스터 로직, 이산 하드웨어 컴포넌트들 또는 본원에 설명되는 기능들을 수행하도록 설계된 이들의 임의의 결합에 대응할 수 있다. 범용 프로세서는 마이크로프로세서일 수 있지만, 대안적으로, 프로세서는 임의의 종래의 프로세서, 제어기, 마이크로제어기, 또는 상태 머신일 수 있다. 프로세서는 또한 컴퓨팅 디바이스들의 결합, 예를 들어 DSP 및 마이크로프로세서의 결합, 복수의 마이크로프로세서들, DSP 코어와 결합된 하나 또는 둘 이상의 마이크로프로세서들, 또는 임의의 다른 이러한 구성으로서 구현될 수 있다. 정보를 프로세싱하도록 구성되는 로직(310)은 또한, 실행될 때, 정보를 프로세싱하도록 구성되는 로직(310)의 연관된 하드웨어가 그것의 프로세싱 기능(들)을 수행하게 허용하는 소프트웨어 또는 펌웨어를 포함할 수 있다. 그러나, 정보를 프로세싱하도록 구성되는 로직(310)은 소프트웨어에만 대응하지 않고, 정보를 프로세싱하도록 구성되는 로직(310)은 그것의 기능을 달성하기 위해 하드웨어에 적어도 부분적으로 의존한다.
[0032] 도 3을 참조하면, 통신 디바이스(300)는 정보를 저장하도록 구성되는 로직(315)을 더 포함한다. 예에서, 정보를 저장하도록 구성되는 로직(315)은 적어도 비-일시적 메모리 및 연관된 하드웨어(예를 들어, 메모리 제어기 등)를 포함할 수 있다. 예를 들어, 정보를 저장하도록 구성되는 로직(315)에 포함되는 비-일시적 메모리는 RAM, 플래시 메모리, ROM, EPROM(erasable programmable ROM), EEPROM, 레지스터들, 하드 디스크, 이동식 디스크, CD-ROM 또는 당해 기술 분야에 공지된 임의의 다른 형태의 저장 매체에 대응할 수 있다. 정보를 저장하도록 구성되는 로직(315)은 또한, 실행될 때, 정보를 저장하도록 구성되는 로직(315)의 연관된 하드웨어가 그것의 저장 기능(들)을 수행하게 허용하는 소프트웨어 또는 펌웨어를 포함할 수 있다. 그러나, 정보를 저장하도록 구성되는 로직(315)은 소프트웨어에만 대응하지 않고, 정보를 저장하도록 구성되는 로직(315)은 그것의 기능을 달성하기 위해 하드웨어에 적어도 부분적으로 의존한다.
[0033] 도 3을 참조하면, 통신 디바이스(300)는 정보를 제시하도록 구성되는 로직(320)을 선택적으로 더 포함한다. 예에서, 정보를 제시하도록 구성되는 로직(320)은 적어도 출력 디바이스 및 연관된 하드웨어를 포함할 수 있다. 예를 들어, 출력 디바이스는 비디오 출력 디바이스(예를 들어, 디스플레이 스크린, 비디오 정보를 전달할 수 있는 포트, 이를테면, USB, HDMI 등), 오디오 출력 디바이스(예를 들어, 스피커들, 오디오 정보를 전달할 수 있는 포트, 이를테면, 마이크로폰 잭, USB, HDMI 등), 진동 디바이스, 및/또는 정보가 출력을 위해 포맷되거나, 통신 디바이스(300)의 운영자 또는 사용자에게 실제로 출력될 수 있게 하는 임의의 다른 디바이스를 포함할 수 있다. 예를 들어, 통신 디바이스(300)가 도 2에 도시된 바와 같이 UE(200A) 또는 UE(200B)에 대응하는 경우, 정보를 제시하도록 구성되는 로직(320)은 UE(200A)의 디스플레이(210A) 또는 UE(200B)의 터치스크린 디스플레이(205B)를 포함할 수 있다. 추가 예에서, 정보를 제시하도록 구성되는 로직(320)은 로컬 사용자를 갖고 있지 않는 네트워크 통신 디바이스들(예를 들어, 네트워크 스위치들 또는 라우터들, 원격 서버들 등) 또는 사용자와의 상호작용이 필요하지 않거나 지원되지 않는 경우 사용자를 갖는 디바이스들(예를 들어, 어린이, 동물 또는 값 비싼 에셋(valuable asset)의 위치를 유지 및 제공하는 착용가능한 또는 부착식 디바이스)과 같은 특정 통신 디바이스들에 대해 생략될 수 있다. 정보를 제시하도록 구성되는 로직(320)은 또한, 실행될 때, 정보를 제시하도록 구성되는 로직(320)의 연관된 하드웨어가 그것의 제시 기능(들)을 수행하게 허용하는 소프트웨어를 포함할 수 있다. 그러나, 정보를 제시하도록 구성되는 로직(320)은 소프트웨어에만 대응하지 않고, 정보를 제시하도록 구성되는 로직(320)은 그것의 기능을 달성하기 위해 하드웨어에 적어도 부분적으로 의존한다.
[0034] 도 3을 참조하면, 통신 디바이스(300)는 로컬 사용자 입력을 수신하도록 구성되는 로직(325)을 선택적으로 더 포함한다. 예에서, 로컬 사용자 입력을 수신하도록 구성되는 로직(325)은 적어도 사용자 입력 디바이스 및 연관된 하드웨어를 포함할 수 있다. 예를 들어, 사용자 입력 디바이스는 버튼들, 터치스크린 디스플레이, 키보드, 카메라, 오디오 입력 디바이스(예를 들어, 마이크로폰 또는 오디오 정보를 전달할 수 있는 포트, 이를테면, 마이크로폰 잭, 등) 및/또는 정보가 통신 디바이스(300)의 운영자 또는 사용자로부터 수신될 수 있게 하는 임의의 다른 디바이스를 포함할 수 있다. 예를 들어, 통신 디바이스(300)가 도 2에 도시된 바와 같이 UE(200A) 또는 UE(200B)에 대응하는 경우, 로컬 사용자 입력을 수신하도록 구성되는 로직(325)은 키패드(220A), 버튼들(215A 또는 210B 내지 225B) 중 임의의 것, 터치스크린 디스플레이(205B) 등을 포함할 수 있다. 추가 예에서, 로컬 사용자 입력을 수신하도록 구성되는 로직(325)은 로컬 사용자를 갖고 있지 않는 네트워크 통신 디바이스들(예를 들어, 네트워크 스위치들 또는 라우터들, 원격 서버들 등) 또는 사용자와의 상호작용이 필요하지 않거나 지원되지 않는 경우 사용자를 갖는 디바이스들(예를 들어, 어린이, 동물 또는 값 비싼 에셋의 위치를 유지 및 제공하는 착용가능한 또는 부착식 디바이스)과 같은 특정 통신 디바이스들에 대해 생략될 수 있다. 로컬 사용자 입력을 수신하도록 구성되는 로직(325)은 또한, 실행될 때, 로컬 사용자 입력을 수신하도록 구성되는 로직(325)의 연관된 하드웨어가 그것의 입력 수신 기능(들)을 수행하게 허용하는 소프트웨어를 포함할 수 있다. 그러나, 로컬 사용자 입력을 수신하도록 구성되는 로직(325)은 소프트웨어에만 대응하지 않고, 로컬 사용자 입력을 수신하도록 구성되는 로직(325)은 그것의 기능을 달성하기 위해 하드웨어에 적어도 부분적으로 의존한다.
[0035] 도 3을 참조하면, 305 내지 325의 구성되는 로직들이 도 3에서 별개의 또는 개별 블록들로서 도시되지만, 각각의 구성되는 로직이 그것의 기능을 수행하게 하는 하드웨어 및/또는 소프트웨어가 부분적으로 오버랩할 수 있다는 것이 인식될 것이다. 예를 들어, 305 내지 325의 구성되는 로직들의 기능을 가능하게 하기 위해 이용되는 임의의 소프트웨어는, 305 내지 325의 구성되는 로직들이 각각 정보를 저장하도록 구성되는 로직(315)에 의해 저장된 소프트웨어의 동작에 적어도 부분적으로 기초하여 이들의 기능(즉, 이러한 경우, 소프트웨어 실행)을 수행하도록 하기 위해, 그 정보를 저장하도록 구성되는 로직(315)과 연관된 비-일시적 메모리에 저장될 수 있다. 마찬가지로, 구성되는 로직들 중 하나와 직접 연관된 하드웨어는 가끔 다른 구성되는 로직들에 의해 차용 또는 이용될 수 있다. 예를 들어, 정보를 프로세싱하도록 구성되는 로직(310)의 프로세서는, 정보를 수신 및/또는 송신하도록 구성되는 로직(305)이 정보를 프로세싱하도록 구성되는 로직(310)과 연관된 하드웨어(즉, 프로세서)의 동작에 적어도 부분적으로 기초하여 그것의 기능(즉, 이러한 경우, 데이터의 송신)을 수행하도록 하기 위해, 그 정보를 수신 및/또는 송신하도록 구성되는 로직(305)에 의해 송신되기 전에 데이터를 적절한 포맷으로 포맷할 수 있다.
[0036] 일반적으로, 별도로 명시적으로 서술되지 않는 한, 본 개시 전반에 걸쳐 이용되는 바와 같은 "~하도록 구성되는 로직"이라는 문구는 하드웨어로 적어도 부분적으로 구현되는 양상을 인보크하도록 의도되며, 하드웨어와는 독립적인 소프트웨어-전용 구현들에 맵핑하도록 의도되는 것은 아니다. 또한, 다양한 블록들에서 "~하도록 구성되는 로직" 또는 구성되는 로직은 특정 로직 게이트들 또는 엘리먼트들에 제한되지 않지만, 일반적으로 (하드웨어 또는 하드웨어와 소프트웨어의 결합을 통해) 본원에 설명된 기능을 수행하기 위한 능력을 지칭한다는 것이 인식될 것이다. 따라서, 다양한 블록들에 예시된 바와 같은 "~하도록 구성되는 로직" 또는 구성되는 로직들은 "로직"이라는 용어를 공유함에도 불구하고, 반드시 로직 게이트들 또는 로직 엘리먼트들로서 구현되는 것이 아니다. 다양한 블록들에서의 로직 간의 다른 상호작용들 또는 협력은 아래에서 더 상세하게 설명되는 양상들의 리뷰로부터 당업자에게 명백해질 것이다.
[0037] 다양한 양상들은 다양한 상업적으로 이용가능한 서버 디바이스들, 이를테면, 도 4에 예시된 서버(400) 중 임의의 것 상에서 구현될 수 있다. 예에서, 서버(400)는 위에서 설명된 위치 서버(170)의 일 예시적 구성에 대응할 수 있다. 도 4에서, 서버(400)는 휘발성 메모리(402) 및 큰 용량 비휘발성 메모리, 이를테면, 디스크 드라이브(403)에 커플링된 프로세서(401)를 포함한다. 서버(400)는 또한, 플로피 디스크 드라이브, CD(compact disc) 또는 프로세서(401)에 커플링된 DVD 디스크 드라이브(406)를 포함할 수 있다. 서버(400)는 또한, 다른 브로드캐스트 시스템 컴퓨터들 및 서버들에 또는 인터넷에 커플링된 로컬 영역 네트워크와 같은 네트워크(407)와의 데이터 연결들을 설정하기 위한 프로세서(401)에 커플링된 네트워크 액세스 포트들(404)을 포함할 수 있다. 도 3에 대한 문맥에서, 도 4의 서버(400)는, 정보를 송신 및/또는 수신하도록 구성되는 로직(305)이 네트워크(407)와 통신하기 위해 서버(400)에 의해 이용되는 네트워크 액세스 포인트들(404)에 대응하고, 정보를 프로세싱하도록 구성되는 로직(310)이 프로세서(401)에 대응하고, 정보를 저장하도록 구성되는 로직(315)이 휘발성 메모리(402), 디스크 드라이브(403) 및/또는 디스크 드라이브(406)의 임의의 결합에 대응하는 통신 디바이스(300)의 일 예시적 구현을 예시한다는 것이 인식될 것이다. 정보를 제시하도록 구성되는 선택적 로직(320) 및 로컬 사용자 입력을 수신하도록 구성되는 선택적 로직(325)은 도 4에 명시적으로 도시되지 않으며, 본원에 포함될 수 있거나 포함되지 않을 수 있다. 따라서, 도 4는 통신 디바이스(300)가 도 2의 205A 또는 205B로서의 UE 구현과 더불어, 서버로서 구현될 수 있음을 설명하는 것을 돕는다.
[0038] 열악한 포지셔닝 환경 또는 "열악한 환경"은 사용자 디바이스가 전형적으로, 위성, 셀룰러 및/또는 로컬 무선 네트워크 포지셔닝 시스템들, 이를테면, GNSS, A-GNSS, AFLT, OTDOA, E-CID, WiFi 등으로부터 그것의 위치를 결정할 수 없는 것이다. 열악한 포지셔닝 환경은 전형적으로, 이러한 타입들의 위치들에서의 포지셔닝 신호들의 과도한 감쇠로 인해, 빌딩 또는 지하철 시스템과 같은 실내 또는 지하 위치일 것이다. 열악한 환경에서, 일부 소스들(예를 들어, WiFi 액세스 포인트들, 펨토셀들)로부터의 라디오 신호들은 때때로 이용가능할 수 있지만, (예를 들어, 삼변측량을 통해) 위치를 정확하게 획득하기에는 이러한 소스들이 불충분할 수 있다. 대안적으로, 일부 라디오 소스들이 존재할 수 있지만 (예를 들어, 사이트 서베이(site survey)의 결여 또는 사이트 측정들의 결여로 인하여) 라디오 소스들의 위치들이 공지되지 않을 수 있거나, 라디오 소스들의 위치들이 공지될 수 있지만 사용자 디바이스에 또는 사용자 디바이스와 통신하는 임의의 위치 서버에 대해 이용가능하지 않을 수 있다. 따라서, 모든 실내 또는 지하 위치가 열악한 포지셔닝 환경을 구성하는 것은 아닐 수 있다(예를 들어, 이 경우에는, 공지되어도 있고 이용도 가능한 위치들을 갖는 위치에서 다수의 라디오 소스들로부터 라디오 신호들이 검출될 수 있음). 그러나, 위치가 지원될 수 없고, 따라서 열악한 포지셔닝 환경들인 많은 실내 및/또는 지하 위치들이 여전히 존재할 수 있다.
[0039] 사용자 디바이스가 계속 열악한 환경 밖에 있었지만, 이 사용자 디바이스가 열악한 포지셔닝 환경에 진입할 때, 이는 예를 들어, 독립형 GNSS, A-GNSS, AFLT, OTDOA, E-CID, WiFi 등을 이용하여 획득되었던 자신의 위치에 대한 정확한 추정을 여전히 가질 수 있다. 대안적으로, 사용자 디바이스는 위치가 공지되며 구성되는 일부 고정 디바이스, 이를테면, 지하철 시스템 빌링 머신과 NFC(near-field communication) 또는 BT(Bluetooth) 상호작용을 통해 그것의 위치를 획득할 수 있다. NFC 및 BT 통신이 아주 짧은 거리들(예를 들어, NFC에 대해 수 센티미터들) 상에서 종종 발생하기 때문에, 사용자 디바이스로 송신될 때의 고정 디바이스의 공지된 위치는 사용자 디바이스에 대해 아주 정확한 위치가 될 수 있다. 신뢰성 있는 포지셔닝 신호들의 수신을 상실(lose)한 이후, 사용자 디바이스는 사용자 디바이스 내부에서의 센서 측정들에 기초하여 관성 네비게이션을 이용하여 일시적 기간의 시간(예를 들어, 10분) 동안 열악한 포지셔닝 환경에서 그것의 위치를 유지할 수 있다. 그러나, 사용자 디바이스 위치의 정확도는 전형적으로, 내부 센서들로부터의 작은 측정 에러들이 시간이 지남에 따라 누적되는 것과 같이 디그레이딩(degrade)될 것이다. 결국, 사용자 디바이스 위치는 많은 애플리케이션들, 예를 들어, 네비게이션 방향들에 대한 사용자에게의 제공, 또는 인근 장소들(예를 들어, 식당, 티켓 키오스크, 출구(exit door) 등)의 위치에 대한 사용자에게의 제공을 지원하기에는 너무 부정확해질 수 있다.
[0040] 이러한 이슈를 다루기 위해, 사용자 디바이스는 다이렉트 피어-투-피어 라디오 통신들, 이를테면, LTE-D(LTE-Direct), WiFi-D(WiFi-Direct) 등을 이용하여 그것의 현재 위치를 다른 사용자 디바이스들로 브로드캐스트할 수 있다. 위치 브로드캐스트들을 수신하는 다른 사용자 디바이스들은 브로드캐스트하는 사용자 디바이스로의 RTT(round trip time)를 컴퓨팅할 수 있다. RTT는 또 다른 사용자 디바이스가 근접해있는지 아닌지에 대한 결정에서 중요한 파라미터일 수 있으며, 신호 강도 및 신호 품질로부터 또는 신호 타이밍을 통해 측정될 수 있다. 그 다음, 수신 디바이스들은 둘 또는 셋 이상의 다른 사용자 디바이스들로부터의 위치 브로드캐스트들 및 RTT들을 이용하여 그들 자신의 위치들을 업데이트할 수 있다. 대안적으로, 단지 하나의 브로드캐스트하는 디바이스에 대한 위치 브로드캐스트 및 RTT는, 송신 거리가 예를 들어, 작은 RTT의 강한 신호 또는 측정의 수신으로 인하여 작아지는 것으로 공지될 때 또 다른 사용자 디바이스의 위치를 업데이트하기에 충분할 수 있다.
[0041] 이러한 방식으로, 긴 기간의 시간 동안 열악한 포지셔닝 환경 내부에 있는 것으로 인하여 그것의 위치 추정들이 디그레이딩되는 사용자 디바이스들은, 최근에 폐쇄형 구조에 진입하고 따라서, 전형적으로 더 정확한 위치 추정들을 갖는 사용자 디바이스들로부터의 위치 브로드캐스트들을 이용하여 그들의 위치들을 업데이트할 수 있다. 사용자 디바이스들은 그들 자신의 위치 추정들에 불확실성 인자(즉, 확률 에러(probable error))를 유지하고, 이것을 그들이 브로드캐스트한 위치들에 포함시킬 수 있다. 이것은 사용자 디바이스들이 다른 사용자 디바이스들, 이를테면, 가장 최근에 열악한 환경에 진입한 사용자 디바이스들의 더 정확한 위치들만을 선택적으로 이용하게 할 수 있다. 지하철 시스템에서, 예를 들어, 사용자 디바이스들은 하나의 스테이션으로부터 또 다른 스테이션으로 긴 거리들을 이동할 수 있고, 이 시간 동안, 그들 자신의 내부 위치는 크게 디그레이딩될 수 있다. 그러나, 이러한 디바이스들은 시스템에 막 진입한 사용자 디바이스들, 예를 들어, 기차에 막 탑승한 사용자들과 연관된 디바이스들로부터 그들의 위치들을 리플레시할 수 있다.
[0042] 이러한 방식으로 정확한 위치들을 유지하는 것은 또한, 열악한 포지셔닝 환경 내부에서 로컬 무선 네트워크 액세스 포인트들 및/또는 NFC 및 BT 디바이스들의 위치들을 크라우드 소싱하는 것을 돕기 위해 이용될 수 있다. 예를 들어, 사용자 디바이스들은, 액세스 포인트가 검출되었던 시간에서 또는 액세스 포인트가 검출되었던 시간 동안, 그 자신의 위치 및 위치 불확실성의 현재 사용자 디바이스의 추정을 가지며 함께 열악한 위치 환경에 있는 동안 검출된 각각의 액세스 포인트(또는 BT 또는 NFC 디바이스)의 아이덴티티(예를 들어, WiFi 액세스 포인트의 경우 IEEE MAC(Media Access Control) 어드레스)를 레코딩할 수 있다. 사용자 디바이스는 또한, 액세스 포인트 및/또는 RTT로부터의 라디오 신호 강도의 측정들과 같은 검출된 액세스 포인트와 연관된 신호 측정들을 생성 및 레코딩할 수 있다. 어떤 추후 시간에, 사용자 디바이스는 도 1의 위치 서버(170)와 같은 서버로 열악한 환경에 있는 동안 검출된 모든 액세스 포인트들에 대해 저장된 데이터를 업로딩할 수 있다. 그 다음, 서버는 액세스 포인트들의 위치를 추정하기 위해 많은 사용자 디바이스들로부터 수신된 정보를 결합할 수 있다.
[0043] 위치 에러들(예를 들어, 사용자 디바이스들 및/또는 고정 액세스 포인트들에 관한 위치 에러들)을 검출 및 정정하기 위해, 사용자 디바이스들은 이들이 다수의 다른 디바이스들로부터 수신하는 위치 정보를 비교하고, 대부분의 다른 디바이스들로부터의 위치들과 일치하지 않는 위치들을 필터링한다. 이것은 지속적으로 수행될 수 있다. 일 예에서, 예를 들어, 잘못된 위치를 갖는 열악한 포지셔닝 환경에 진입하는 것 또는 열악한 포지셔닝 환경에 있는 동안 일부 다른 사용자 디바이스들로부터 잘못된 위치를 포착하는 것으로 인하여 잘못된 위치를 브로드캐스트하는 사용자 디바이스는, 다른 사용자 디바이스가 많은 다른 사용자 디바이스들로부터 다른 위치 추정들을 수신하고, 많은 다른 디바이스들로부터의 위치 추정들과의 그것의 불일치로 인하여 잘못된 위치 추정을 갖는 사용자 디바이스로부터의 위치 추정을 무시하는 경우, 또 다른 사용자 디바이스의 위치 추정들을 손상시키는 것이 방지될 수 있다. 또 다른 예에서, 주어진 NFC 또는 BT 디바이스의 구성된 위치의 에러는 많은 다른 사용자 디바이스들(예를 들어, 열악한 포지셔닝 환경에 진입하기 직전에 구성된 잘못된 위치를 수신 및 이용하는 사용자 디바이스들)의 위치 에러들을 일시적으로 유도할 수 있고, 그에 의해 잘못된 위치들로 이러한 사용자 디바이스들을 감염(infect)시킨다. 그러나, 임의의 이러한 감염된 사용자 디바이스가 다른 NFC 또는 BT 디바이스들로부터 또는 A-GNSS, AFLT 또는 OTDOA와 같은 다른 신뢰성있는 포지션 방법 소스들로부터 위치들이 더 일찍 정확하게 제공되었던 사용자 디바이스들과 접촉할 때, 이러한 잘못된 위치는 검출되어 추후에 제거될 수 있다. 감염된 사용자 디바이스들의 수가 열악한 포지셔닝 환경에서 사용자 디바이스들의 총 수보다 훨씬 작은 경우, 감염된 디바이스들은 그들 자신의 잘못된 위치 추정들과, 훨씬 더 큰 수의 감염되지 않은 사용자 디바이스들로부터 브로드캐스트된 위치를 통해 획득된 정확한 위치 추정들 사이의 불일치를 발견할 수 있다. 추가로, 위치들을 크라우드 소싱함으로써, 잘못된 위치들을 사용자 디바이스들에 전달하는 NFC 또는 BT 디바이스들(또는, 예를 들어, 로컬 무선 네트워크 액세스 포인트들)이 식별될 수 있고, 사용자 디바이스들은 이러한 송신기들로부터의 위치들을 무시하도록 (예를 들어, 위치 서버(170)와 같은 서버에 의해) 명령을 받을 수 있다.
[0044] 위치 에러 검출의 예로서, 각각의 사용자 디바이스는 그것이 위치 추정을 획득하였던 임의의 NFC, BT 또는 다른 디바이스의 아이덴티티의 레코드를 유지할 수 있으며, 또한, 이러한 위치 추정(또는 관성 센서들을 이용하여 이러한 위치 추정으로부터 유도되는 위치 추정)이 많은 다른 사용자 디바이스들의 위치 추정들 또는 그것이 그 다음, 양호한 포지셔닝 환경에 진입할 때 사용자 디바이스에 의해 획득된 위치 추정과 불일치하는 것으로 후속적으로 발견되었는지 여부를 레코딩할 수 있다. 사용자 디바이스 또는 위치 레코드가 사용자 디바이스에 의해 추후에 업로딩되는 임의의 서버는, 그 다음, 잘못된 NFC, BT 또는 다른 디바이스를 결정할 수 있다. 따라서, 위치 업데이팅의 히스토리를 유지하고, 위치가 크게 잘못된 때(예를 들어, 다른 디바이스들과의 불일치(discrepancy)가 발생할 때)를 검출하며, 그것의 원래의 소스로 에러를 백트래킹함으로써, 잘못된 송신기들이 식별될 수 있다.
[0045] 일부 양상들에서, 사용자 디바이스들은 어떤 NFC 또는 BT 디바이스(또는, 예를 들어, 로컬 무선 네트워크 액세스 포인트)가 잘못된 것인지를 결정할 필요가 없을 수 있지만 정보(위치 불일치 및 위치 업데이팅 히스토리)를 많은 사용자 디바이스들로부터 수신된 데이터를 이용하여 통계적 수단에 의해 에러를 분리할 수 있는 서버, 이를테면, 위치 서버(170)에 단순히 제공할 수 있다. 예를 들어, 감염된 사용자 디바이스들은 그들의 위치들이 잘못되었음을 발견하기 전에 잘못된 위치를 다른 사용자 디바이스들로 전달할 수 있고, 다른 사용자 디바이스들은 그들의 획득된 잘못된 위치들을 여전히 추가의 사용자 디바이스들로 전달할 수 있다. 일부 경우들에서, 정확한 위치와의 불일치는 사용자 디바이스가 양호한 포지셔닝 환경에 재진입할 때까지 발견되지 않을 수 있다. 그러나, 사용자 디바이스는 (i) 예를 들어, 고정된 NFC, BT 및/또는 WiFi 디바이스들로부터 그리고 다른 모바일 사용자 디바이스들로부터 브로드캐스트된 위치 추정들을 이용하는 새로운 위치의 결정, (ii) 많은 다른 사용자 디바이스들의 수신된 위치들 또는 위치의 신뢰성있는 소스, 이를테면, 독립형 GNSS, A-GNSS 또는 OTDOA로부터 획득된 것을 갖는 현재 위치 추정의 불일치의 검출 및 선택적으로, iii) 위치 또는 위치 불일치가 결정되는 시간들을 포함하는 그것의 위치 히스토리의 레코드를 유지할 수 있다. 사용자 디바이스는 또한, 대체되는 사용자 디바이스에 대한 이전 위치 및 불확실성의 값과 임의의 새롭게 결정된 위치 및 그것의 불확실성의 값을 함께 레코딩할 수 있다. 사용자 디바이스는 그 다음, 이러한 상설된 위치 히스토리를 중앙 서버(예를 들어, 위치 서버(170))에 제공할 수 있다. 중앙 서버는 그 다음, 열악한 포지셔닝 환경으로의 진입 이전에 위치의 소스와의 위치 불일치를 검출한 각각의 감염된 사용자 디바이스의 위치 히스토리를 다시 트레이스할 수 있다. 예를 들어, 고정 NFC, BT 또는 WiFi 디바이스들인 위치의 소스들은 초기의 잘못된 위치에 대한 후보들로서 고려될 수 있다. 서버는 또한, 어떠한 위치 불일치도 검출되지 않았던 감염되지 않은 사용자 디바이스들의 위치 히스토리들을 다시 트레이스할 수 있다. 많은 감염된 사용자 디바이스들 및 거의 또는 전혀 감염되지 않은 사용자 디바이스들을 초래하는 위치 소스들은 잘못된 위치에 대한 주요한(prime) 후보들일 것이다. 이러한 소스들은 그 다음, (예를 들어, 크라우드 소싱을 이용하여 이들을 자동으로 로케이팅시키거나 이들을 수동으로 로케이팅시키는 것을 통해) 조사될 수 있고, 필요하다면, 정확한 위치로 재구성될 수 있다.
[0046] 일부 양상들에서, 다른 디바이스들로부터 수신된 위치들을 이용하여 또는 디바이스가 양호한 환경에 재진입한 경우 기존의 포지션 방법들을 이용하여 열악한 환경에 진입한 이후 사용자 디바이스가 그것의 위치를 업데이트하는 제 1 시간에 위치 불일치가 검출될 때, 중앙 서버는 단지 사용자 디바이스의 위치 히스토리를 다시 트레이스할 수 있다. 이것은, 사용자 디바이스가 열악한 환경에서 양호한 위치 추정을 시작하고, 열악한 환경에서 사용자 디바이스의 초기 위치의 과도한 디그레이션으로 인하여 사용자 디바이스에 의해 초기에 검출되지 않은 다른 감염된 사용자 디바이스들로부터의 잘못된 위치에 의해 후속적으로 감염될 때, 양호한 환경에서의 위치의 소스에 대해 잘못된 위치를 잘못되게 야기하는 것을 회피할 수 있다.
[0047] 도 5는 양호한 포지셔닝 환경(530) 및 열악한 포지셔닝 환경(540)을 예시한다. 양호한 환경(530)은 UE들(532, 534 및 536)이 도 5의 점선 화살표들로서 예시된, 하나 또는 둘 이상의 위성들(512) 및 액세스 포인트들(522 및 524)로부터 수신된 신호들에 기초하여 그들의 포지션들을 정확하게 결정할 수 있는 실외 환경일 수 있다. 위성(들)(512)은 하나 또는 둘 이상의 GNSS 위성들일 수 있다. 액세스 포인트들(522 및 524)은 셀룰러 또는 로컬 무선 네트워크 포지셔닝 시스템 내의 하나 또는 둘 이상의 셀룰러 기지국들 또는 로컬 무선 네트워크 액세스 포인트들일 수 있으며, AFLT, OTDOA, E-CID, WiFi 등과 같은 포지션 방법들을 이용하여 UE들(532, 534 및 536)의 위치들을 인에이블할 수 있다.
[0048] 열악한 환경(540)은, UE들(542, 544 및 546)과 같은 UE들이 위성, 셀룰러 또는 로컬 무선 네트워크 포지셔닝 시스템으로부터 신호들을 신뢰성 있게 수신할 수 없으며, 따라서, 이러한 시스템을 이용하여 그들의 위치들을 결정할 수 없는 실내 또는 지하 환경, 이를테면, 지하철 시스템일 수 있다. 그러나, UE들(542, 544 및 546)은 도 5의 양방향 화살표들에 의해 표시된 바와 같이, 다이렉트 피어-투-피어 라디오 통신들, 이를테면, LTE-D, WiFi-D 등을 통해 서로 통신할 수 있다. UE들(542, 544 및 546)은 가변 기간들의 시간 동안 열악한 환경에 있고, 열악한 환경에서 가변 거리들을 이동할 수 있다. 특정 상황들에서, UE들은 다이렉트 피어-투-피어 라디오 통신들에 관여하기 위해 원격 서버, 이를테면 위치 서버(170)로부터 또는 서빙 네트워크, 이를테면, RAN(120) 또는 코어 네트워크(140)로부터 허용 또는 허가를 획득할 필요가 있을 수 있다. 그 경우, UE들은 열악한 환경에 진입하기 전에 동일한 포인트에서 이 허가를 획득할 필요가 있을 수 있다.
[0049] 도 5의 예에서, UE(550)는 초기에 양호한 환경(530)에 있는 것으로 그리고 열악한 환경(540)에 진입하려고 하고 있는 것으로 예시된다. 도시되지 않았지만, UE(550)는 위성, 셀룰러 또는 로컬 무선 네트워크 포지셔닝 시스템으로부터 수신된 신호들에 기초하여 그것의 포지션을 결정할 수 있다. 대안적으로 또는 추가적으로, UE(550)가 열악한 환경(540)에 진입할 때, 그것은 예를 들어, NFC 또는 BT 디바이스 등일 수 있는 액세스 포인트(526)로부터 포지셔닝 신호를 수신할 수 있다. UE(550)는 열악한 환경(540)에 진입할 때 액세스 포인트(526)와 아주 근접해 있을 수 있다(예를 들어, 수 인치 또는 수 피트 내). 예를 들어, 열악한 환경이 지하철 시스템인 경우, 액세스 포인트(526)는 UE(550)가 지하철 시스템에 들어가기 위해 스와이프(swipe)하여야 하는 공지된 위치를 갖는 지하철 시스템 빌링 또는 티켓 또는 엔트리 머신일 수 있다. 액세스 포인트(526)는 그것의 위치를 UE(550)에 전송하고, UE(550)는 근접도로 인하여 그 위치를 자기 자신으로서 채택한다. 이러한 방식으로, UE(550)는, 그것이 위성, 셀룰러 또는 로컬 무선 네트워크 포지셔닝 시스템에 기초하여 그것의 포지션을 알고 있든 아니든 간에, 열악한 환경에 진입할 시 정확한 포지션 결정을 갖는다.
[0050] 열악한 환경(540)에 진입할 시, UE(550)는 관성 네비게이션을 이용하여 그것의 위치를 트래킹하는 것을 시작한다. UE(550)는 또한, 다이렉트 피어-투-피어 라디오 통신들을 이용하여 그것의 위치를 다른 UE들로 브로드캐스팅하는 것을 시작한다. UE(550)는 또한, 그것의 위치에서 불확실성의 레벨 또는 확률 에러를 브로드캐스트할 수 있다. UE(550)가 관성 네비게이션에 기초하여 그것의 위치를 결정하는 것이 더 길어질수록, 그것의 위치의 불확실성 레벨이 더 높아진다. UE(550)가 열악한 환경(540)에서 이동하는 것이 더 멀어질수록, 그것의 위치의 불확실성 레벨은 관성 센서 측정들로부터의 위치 변화 에러들의 누적으로 인하여 더 높아질 수 있다. 몇몇 다른 UE들로부터 위치 정보(위치 및 불확실성 레벨)를 수신하는 UE들은 도 6을 참조하여 논의되는 바와 같이, 이러한 정보를 이용하여 그들 자신의 포지션을 업데이트할 수 있다. 그것의 현재 위치에서의 불확실성 레벨이 임계치를 초과하면, UE는 관성 네비게이션을 이용하여 그것의 위치를 업데이트하는 것을 일시적으로 중지시킬 수 있으며, 대신에, 열악한 환경에 있는 동안 다른 UE들로부터 수신된 위치 정보에 기초하여 자신의 위치를 업데이트할 수 있다. UE(550)가 다른 UE들로부터 수신된 위치 정보에 기초하여 그것의 위치를 업데이트하면, UE(550)는 내부의 관성 네비게이션 센서들을 이용하여 그것의 위치를 업데이트하기 위해 다시 복귀(revert)할 수 있다. UE(550)의 위치가 다시 디그레이딩되는 어떤 추가 기간의 시간 이후, UE(550)는 다른 UE들로부터 수신된 위치 정보에 기초하여 그것의 위치를 다시 업데이트할 수 있다. UE(550)는 또한, 그것 자신의 위치 및 위치 불확실성을 다른 UE들로 브로드캐스트할 수 있고, 다른 UE들은 이것을 이용하여 그들 자신의 위치들을 업데이트할 수 있다. 예를 들어, UE(550)가 열악한 환경(540)에 막 진입할 때 그리고 그것의 위치가 여전히 정확한 동안, 다른 UE들은 UE(550)의 정확한 위치에 기초하여 그들의 위치들을 업데이트할 수 있다. 예를 들어, 지하철 열차 시스템에서, (예를 들어, 사용자들이 역 또는 플랫폼에 막 진입하거나 열차에 탑승한) 시스템에 최근에 진입한 UE들은 더 긴 시간 동안 시스템에 있는 다른 UE들에 정확한 위치들을 제공할 수 있다. 새로운 UE들이 다수의 위치들에서 시스템에 계속적으로 진입할 수 있을 때, 긴 시간 동안 지하철 시스템에 있었던 UE들은 그들의 위치들을 빈번하게 업데이트할 수 있으며, 그에 의해 정확한 위치를 유지할 수 있다.
[0051] 도 5의 예에서, UE들(544 및 546)은 이 UE들이 UE(550)의 다이렉트 피어-투-피어 라디오 통신 범위 내에 있는 것과 같이, UE(550)에 의해 브로드캐스트된 위치 정보를 수신한다. 마찬가지로, UE들(550, 542 및 546)은 UE(544)에 의해 브로드캐스트된 위치 정보를 수신하고, UE들(550, 542 및 544)은 UE(546)에 의해 브로드캐스트된 위치 정보를 수신하며, UE들(544 및 546)은 UE(542)에 의해 브로드캐스트된 위치 정보를 수신한다.
[0052] 도 6은 하나 또는 둘 이상의 다른 UE들의 위치들에 기초하여 열악한 포지셔닝 환경에서 UE의 위치를 결정하는 예시적 흐름을 예시한다. 605에서, UE는 그것이 열악한 포지셔닝 환경에 있는지 아닌지를 결정한다. 일 양상에서, 이것은 UE가 하나 또는 둘 이상의 GNSS 위성들 및/또는 하나 또는 둘 이상의 지상 기지국들 및/또는 액세스 포인트들로부터 라디오 신호들을 수신할 수 있는지 여부를 결정함으로써 달성될 수 있다. 위치의 정확한 측정을 인에이블하기에 적합한 타입을 갖지 않거나 그 수가 충분하지 않은 GNSS 위성들 및/또는 지상 기지국들 및 액세스 포인트들로부터만 UE가 이러한 라디오 신호들을 수신할 수 있는 경우 또는 UE가 이러한 라디오 신호들을 수신할 수 없는 경우, UE는 그것이 열악한 포지셔닝 환경에 있음을 결정할 수 있다. 또 다른 양상에서, UE는 네트워크 커버리지 밖에 있는 것으로, 예를 들어, 도 1의 RAN(120) 또는 액세스 포인트(125)와 통신할 수 없는 것으로, 열악한 포지셔닝 환경에 있는 것과 동일시할 수 있다. UE가 열악한 포지셔닝 환경에 있는 경우, 610에서, UE는 가속도계들, 자력계들, 자이로스코프들 등과 같은 내부의 관성 센서들을 이용하여 그것의 위치를 유지한다. 615에서, UE는 그것의 위치 및 대응하는 불확실성 레벨을 다이렉트 피어-투-피어 라디오 통신들을 통해 하나 또는 둘 이상의 다른 UE들에 송신한다. 위치 불확실성은 UE의 위치 결정에서 확률 또는 가능한 에러를 지칭한다. UE는 특정 지리적 영역(예를 들어, 공지된 크기 및 포지션에 대한 원, 타원 또는 다각형) 내에 있는 것으로 그것의 위치를 결정할 수 있다. 위치 불확실성은 그 다음, 지리적 영역의 크기(예를 들어, 원의 반경 또는 타원의 장반경(semi major axis) 및 단반경(semi minor axis)의 길이들) 및 UE가 실제로 이 영역 내에 있다는 신뢰도 또는 확률에 의해 표시될 수 있다. 주어진 신뢰도에 대한 지리적 영역이 더 작아질수록, 위치 결정의 정확성은 더 높아지고, 위치 불확실성은 더 작아진다. UE가 관성 네비게이션만을 이용하여 그것의 포지션을 결정하는 것이 더 길어질수록, 그것의 위치를 표현하는 지리적 영역은 더 커지고, 따라서, 위치 결정의 정확성은 더 낮아지고, 위치 불확실성은 또한 더 커진다.
[0053] 일부 양상들에서, UE는, 서로 가까이에 있는 UE들에 관련된 서비스들을 지원하는 것에 공통 관심을 갖고, 인근에 있는 다른 UE들을 발견하기 위해 그것의 위치, 및 가능하게는, 그것의 위치 불확실성 및 다른 정보(예를 들어, UE가 관여하기를 바라는 서비스들의 식별)를 브로드캐스트할 수 있다. 예를 들어, 정확한 위치를 유지하는 것이 가능할 때(예를 들어, UE가 열악한 포지셔닝 환경에 있지 않을 때), 또 다른 UE B로부터의 이러한 브로드캐스트를 수신하는 UE A는, 다른 UE B에 의해 브로드캐스트된 위치를 UE A의 공지된 위치와 비교함으로써 다른 UE B가 인근에 있는지 여부를 결정할 수 있다. UE A 및 UE B가 서로 가까이에 있는 경우, 인근에 있는 UE들에 관련된 서비스들을 지원하는 UE들 중 하나 또는 둘 모두 내의 하나 또는 둘 이상의 애플리케이션들은 통지받을 수 있다. 이러한 애플리케이션들에 의해 지원되는 서비스들은 "근접도 서비스들"로 지칭될 수 있으며, 친구들, 친척들 또는 동료들이 인근에 있을 때 사용자에게 통지하거나, 관심있는 일부 장소(예를 들어, 특정 샵, 정보 키오스크, 영화관, 주유소 등) 가까이에 있을 때 사용자에게 통지하는 서비스들을 포함할 수 있다. 이 양상들에서, UE가 그것의 위치 및 위치 불확실성을 브로드캐스트하는 주요한 이유는 (예를 들어, 위치의 브로드캐스트가 이것을 지원하기 위해 3GPP 및 3GPP2와 같은 이러한 기구들에 의해 표준화된 경우) 이러한 근접도 서비스들을 지원하는 것일 수 있다. 그 다음, 열악한 포지셔닝 환경에서 정확한 위치를 또한 지원하기 위한 능력은, 어쨌든 근접도 서비스를 지원하기 위해 다른 UE들로 위치를 브로드캐스트하고 그리고 다른 UE들로부터 위치를 수신하도록 요구되는 것 외에도 사용자 디바이스에서 단지 제한된 구현 지원을 요구한다는 추가 이익이 될 수 있다.
[0054] 620에서, UE는 하나 또는 둘 이상의 다른 UE들(또는 디바이스들)로부터 다이렉트 피어-투-피어 라디오 통신들을 통해 위치들 및 대응하는 불확실성 레벨들을 수신한다. 625에서, UE는 그것의 불확실성 레벨이 하나 또는 둘 이상의 다른 디바이스들 중 임의의 것의 불확실성 레벨들보다 큰지 아닌지를 결정한다. UE의 불확실성 레벨이 다른 디바이스들 각각의 불확실성 레벨들보다 적거나 동일한 경우, 흐름은 605로 리턴한다. 그러나, UE의 불확실성 레벨이 임의의 임계치(이는 일부 양상들에서 0일 수 있음)만큼 적어도 하나의 다른 UE의 불확실성 레벨보다 큰 경우, 630에서, UE는 더 낮은 불확실성 레벨들을 갖는 UE(들)에 대한 거리(들)를 결정한다. UE는 다른 UE에 대한 RTT를 계산함으로써 또 다른 UE에 대한 거리를 결정할 수 있다. RTT는 신호 타이밍을 통해 또는 신호 강도 및 신호 품질로부터 측정될 수 있다. 예를 들어, RTT는, 디바이스 A로부터 또 다른 디바이스 B로 신호 또는 메시지를 전송하고, 응답을 다시 전송할 시 디바이스 B에 내부 지연을 포함시키는 응답을 다시 수신함으로써 측정될 수 있다. 그 다음, RTT는, 디바이스 B에서의 내부 응답 지연 미만인, 디바이스 A에서의 송신 시간들과 수신 시간들 사이의 차만큼 주어질 것이다. 라디오 신호들의 속도(전형적으로, 광속)와 곱해지고 2로 나누어지는 RTT는 디바이스 A와 디바이스 B 사이의 거리를 제공한다.
[0055] 635에서, UE는 예로서, 일부 형태의 삼변측량 또는 다변측량을 이용하여 수신된 위치들, 수신된 위치 불확실성들 및 결정된 거리들에 기초하여 그것의 위치 및 위치 불확실성을 결정한다. 양상에서, 결정된 거리들이 작고(예를 들어, 어떤 임계치 미만) 그리고/또는 결정될 수 없는 경우, UE는 결정된 거리들을 무시할 수 있다. 이 양상에서, UE는, 예를 들어, 다른 디바이스들의 위치들 또는 위치 좌표들을 평균화함으로써 또는 다른 위치들 또는 위치 좌표들의 가중된 평균(예를 들어, 여기서, 위치들 또는 위치 좌표들에 대한 가중 인자들은 연관된 디바이스들에 대한 수신된 신호 강도에 비례함)을 이용함으로써 단지 다른 디바이스들로부터 수신된 위치들에 기초하여 그것의 위치를 결정할 수 있다. 이 양상에서, UE가 하나의 다른 디바이스로부터 단지 하나의 위치를 수신하고, RTT 또는 거리가 작은 것으로 결정(예를 들어, 어떤 임계치 미만인 것으로 결정)되거나, (예를 들어, 어떤 임계치를 초과하는, 다른 디바이스로부터의 신호 강도에 기초하여) 작은 것으로 가정될 때, UE는 그것의 새로운 위치를 다른 디바이스로부터 수신된 위치와 동일한 것으로 세팅할 수 있으며, RTT를 무시할 시 에러를 고려하기 위해 그것의 새로운 위치 불확실성을 다른 디바이스로부터 수신된 위치 불확실성보다 크도록 세팅할 수 있다.
[0056] 640에서, UE는 새로운 위치가 이전 위치보다 더 정확한지 아닌지를 결정한다. 만약 그렇지 않다면, 흐름은 605로 리턴한다. 그러나, 만약 그렇다면, 645에서, UE는 그것의 내부 메모리, 이를테면, 메모리(212) 또는 데이터베이스(214)에 새로운 위치를 저장한다. 그 다음, 흐름은 605로 리턴한다.
[0057] 605에서, UE가 열악한 포지셔닝 환경에 있지 않은 경우, 650에서, UE는 UE가 이미 열악한 포지셔닝 환경에 있는 동안 저장할 수 있는 수신된 위치들 및 결정된 위치들의 임의의 히스토리를 위치 서버, 이를테면, 위치 서버(170)에 전송한다. 서버는 이러한 정보를 이용하여 UE의 위치를 트래킹하고, 임의의 고정 디바이스들, 이를테면, NFC 또는 BT 송신기의 위치들에서의 에러들을 식별 및 정정할 수 있다. UE가 위치 서버에 아직 전송되지 않은 열악한 포지셔닝 환경으로부터의 위치 히스토리를 UE가 갖고 있지 않는 경우, 605에서의 동작은 스킵될 수 있다. 655에서, UE는 열악한 환경에 있지 않기 때문에, UE는 이제 위성, 셀룰러 또는 로컬 무선 네트워크 포지셔닝 시스템을 이용하여 양호한 환경에서 그것의 위치를 결정 및 유지할 수 있다. 흐름은 UE가 또 다른 열악한 환경에 진입하는지 아닌지를 결정하기 위해 605로 리턴한다.
[0058] 당업자들은 정보 및 신호들이 다양한 서로 다른 기술들 및 기법들 중 임의의 것을 이용하여 표현될 수 있다는 것을 이해할 것이다. 예를 들어, 위의 설명 전체에 걸쳐 참조될 수 있는 데이터, 명령들, 커맨드들, 정보, 신호들, 비트들, 심볼들, 및 칩들은 전압들, 전류들, 전자기파들, 자기장들 또는 자기 입자들, 광 필드들 또는 광 입자들, 또는 이들의 임의의 결합으로 표현될 수 있다.
[0059] 추가로, 당업자들은 본원에 개시된 양상들과 관련하여 설명되는 다양한 예시적인 논리 블록들, 모듈들, 회로들 및 알고리즘 단계들이 전자 하드웨어, 컴퓨터 소프트웨어 또는 이 둘의 결합들로서 구현될 수 있다는 것을 인식할 것이다. 하드웨어와 소프트웨어의 이러한 상호 교환가능성을 명확하게 설명하기 위해, 다양한 예시적인 컴포넌트들, 블록들, 모듈들, 회로들 및 단계들이 일반적으로 이들의 기능적 관점에서 위에서 설명되었다. 이러한 기능이 하드웨어로 구현되는지, 또는 소프트웨어로 구현되는지는 전체 시스템 상에 부과되는 설계 제한들 및 특정 애플리케이션에 의존한다. 당업자들은 설명된 기능을 각각의 특정한 애플리케이션에 대해 다양한 방식들로 구현할 수 있지만, 이러한 구현 결정들은 본 개시의 범위를 벗어나게 하는 것으로 해석되어서는 안 된다.
[0060] 본원에 개시된 양상들과 관련하여 설명된 다양한 예시적 논리 블록들, 모듈들 및 회로들이, 범용 프로세서, DSP(digital signal processor), ASIC(application specific integrated circuit), FPGA(field programmable gate array) 또는 다른 프로그래머블 로직 디바이스, 이산 게이트 또는 트랜지스터 로직, 이산 하드웨어 컴포넌트들, 또는 (본원에 설명된 기능들을 수행하도록 설계된) 이들의 임의의 결합으로 구현 또는 수행될 수 있다. 범용 프로세서는 마이크로프로세서일 수 있지만, 대안적으로, 프로세서는 임의의 종래의 프로세서, 제어기, 마이크로제어기, 또는 상태 머신일 수 있다. 프로세서는 또한, 컴퓨팅 디바이스들의 결합, 예를 들어, DSP 및 마이크로프로세서의 결합, 복수의 마이크로프로세서들, DSP 코어와 결합된 하나 또는 둘 이상의 마이크로프로세서들, 또는 임의의 다른 이러한 구성으로서 구현될 수 있다.
[0061] 본원에 개시된 양상들과 관련하여 설명된 방법들, 시퀀스들 및/또는 알고리즘들은 직접적으로 하드웨어로, 프로세서에 의해 실행되는 소프트웨어 모듈로, 또는 이 둘의 결합으로 구현될 수 있다. 소프트웨어 모듈은 RAM, 플래시 메모리, ROM, EPROM, EEPROM, 레지스터들, 하드디스크, 이동식(removable) 디스크, CD-ROM, 또는 당해 기술 분야에 공지된 임의의 다른 형태의 저장 매체에 상주할 수 있다. 예시적인 저장 매체는, 프로세서가 저장 매체로부터 정보를 판독하고, 저장 매체에 정보를 기록할 수 있도록 프로세서에 커플링된다. 대안적으로, 저장 매체는 프로세서에 통합될 수 있다. 프로세서 및 저장 매체는 ASIC에 상주할 수 있다. ASIC는 사용자 단말(예를 들어, UE)에 상주할 수 있다. 대안적으로, 프로세서 및 저장 매체는 사용자 단말 내에 개별 컴포넌트들로서 상주할 수 있다.
[0062] 하나 또는 둘 이상의 예시적 양상들에서, 설명된 기능들은 하드웨어, 소프트웨어, 펌웨어 또는 이들의 임의의 결합으로 구현될 수 있다. 소프트웨어로 구현되는 경우, 기능들은 컴퓨터 판독가능한 매체 상에 하나 또는 둘 이상의 명령들 또는 코드로서 저장되거나 또는 이들을 통해 송신될 수 있다. 컴퓨터 판독가능한 매체는 하나의 장소에서 다른 장소로 컴퓨터 프로그램의 이전을 가능하게 하는 임의의 매체를 포함하는 통신 매체들 및 컴퓨터 저장 매체들 둘 다를 포함한다. 저장 매체들은 컴퓨터에 의해 액세스될 수 있는 임의의 이용가능한 매체들일 수 있다. 제한이 아닌 예로서, 이러한 컴퓨터 판독가능한 매체는 RAM, ROM, EEPROM, CD-ROM 또는 다른 광학 디스크 저장소, 자기 디스크 저장소 또는 다른 자기 저장 디바이스들, 또는 원하는 프로그램 코드를 명령들 또는 데이터 구조들의 형태로 전달 또는 저장하기 위해 이용될 수 있고 컴퓨터에 의해 액세스될 수 있는 임의의 다른 매체를 포함할 수 있다. 또한, 임의의 연결수단이 컴퓨터 판독가능한 매체로 적절히 지칭된다. 예를 들어, 소프트웨어가 동축 케이블, 광섬유 케이블, 트위스티드 페어(twisted pair), DSL(digital subscriber line), 또는 (적외선, 라디오, 및 마이크로웨이브와 같은) 무선 기술들을 이용하여 웹사이트, 서버, 또는 다른 원격 소스로부터 송신되는 경우, 동축 케이블, 광섬유 케이블, 트위스티드 페어, DSL, 또는 (적외선, 라디오, 및 마이크로웨이브와 같은) 무선 기술들이 매체의 정의 내에 포함된다. 본원에서 이용되는 바와 같은 디스크(disk 및 disc)는 CD(compact disc), 레이저 디스크(disc), 광 디스크(disc), DVD(digital versatile disc), 플로피 디스크(disk) 및 블루-레이 디스크(disc)를 포함하며, 여기서 디스크(disk)들은 통상적으로 데이터를 자기적으로 재생하는 반면, 디스크(disc)들은 레이저들을 이용하여 데이터를 광학적으로 재생한다. 위의 것들의 결합들은 또한 컴퓨터 판독가능한 매체들의 범위 내에 포함되어야 한다.
[0063] 위의 개시는 본 개시의 예시적 양상들을 나타내지만, 다양한 변화들 및 변경들이 첨부된 청구항들에 의해 정의되는 바와 같은 본 개시의 범위로부터 벗어나지 않으면서 본원에서 이루어질 수 있다는 점이 주목되어야 한다. 본원에 설명된 본 개시의 양상들에 따른 방법 청구항들의 기능들, 단계들 및/또는 동작들이 임의의 특정한 순서로 수행될 필요는 없다. 게다가, 본 개시의 엘리먼트들은 단수형으로 설명되거나 또는 청구될 수 있지만, 단수형으로의 제한이 명시적으로 표기되지 않는 한 복수형이 참작된다.
Claims (47)
- 하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법으로서,
제 1 디바이스로부터 상기 제 1 디바이스의 제 1 위치 및 제 1 위치 불확실성을 수신하는 단계;
상기 제 1 위치 불확실성이 상기 UE의 위치 불확실성보다 적은지 아닌지를 결정하는 단계; 및
상기 제 1 위치 불확실성이 상기 UE의 위치 불확실성보다 적은 경우, 상기 제 1 디바이스의 위치 및 상기 제 1 디바이스에 대한 거리에 기초하여 상기 UE의 위치를 결정하는 단계를 포함하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 1 항에 있어서,
상기 UE는:
네트워크 커버리지 밖에 있는 것;
하나 또는 둘 이상의 GNSS(Global Navigation Satellite System) 위성들 및/또는 하나 또는 둘 이상의 지상 기지국들 및/또는 액세스 포인트들로부터 라디오 신호들을 수신할 수 없는 것; 또는
위치의 정확한 측정을 인에이블하기 위해 수가 불충분하고 그리고/또는 적합한 타입을 갖지 않는 GNSS 위성들 및/또는 지상 기지국들 및/또는 액세스 포인트들로부터만 라디오 신호들을 수신할 수 있는 것 중 적어도 하나에 기초하여, 상기 UE가 열악한 포지셔닝 환경에 있음을 결정하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 1 항에 있어서,
상기 UE의 위치 및 상기 UE의 위치 불확실성을 하나 또는 둘 이상의 다른 디바이스들에 송신하는 단계를 더 포함하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 3 항에 있어서,
상기 UE의 위치 및 상기 UE의 위치 불확실성은 다이렉트 피어-투-피어 라디오 통신들을 이용하여 송신되는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 3 항에 있어서,
상기 UE는, 상기 UE 및 서로 가까이에 있는 인근(nearby) 디바이스들에 관련된 근접 서비스들을 지원하는 것에 대해 공통적 관심을 갖는 상기 인근 디바이스들을 발견하기 위해 상기 위치 및 상기 위치 불확실성을 송신하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 5 항에 있어서,
상기 근접 서비스들은, 친구들, 친척들 또는 동료들이 인근에 있을 때 사용자에게 통지하거나, 사용자가 관심 있는 장소에 가까이 있을 때 상기 사용자에게 통지하는 서비스들을 포함하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 1 항에 있어서,
상기 제 1 디바이스의 상기 제 1 위치 및 상기 제 1 위치 불확실성은 다이렉트 피어-투-피어 라디오 통신들을 이용하여 상기 UE에 의해 수신되는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 1 항에 있어서,
상기 열악한 포지셔닝 환경에 진입한 이후, 관성 네비게이션을 이용하여 상기 UE의 위치를 트래킹하는 단계를 더 포함하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 1 항에 있어서,
상기 UE는 상기 열악한 포지셔닝 환경에 진입한 이후, 상기 제 1 위치 및 상기 제 1 위치 불확실성을 수신하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 1 항에 있어서,
상기 열악한 포지셔닝 환경은 상기 UE가 위성, 셀룰러 및/또는 로컬 무선 네트워크 포지셔닝 시스템을 이용하여 상기 UE의 위치를 결정할 수 없는 환경인,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 1 항에 있어서,
상기 제 1 디바이스는 상기 열악한 포지셔닝 환경에 로케이팅되는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 11 항에 있어서,
상기 제 1 디바이스는 상기 열악한 포지셔닝 환경을 검출하는 것에 응답하여 상기 제 1 위치 및 상기 제 1 위치 불확실성을 송신하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 1 항에 있어서,
상기 제 1 디바이스는 상기 열악한 포지셔닝 환경 내부에 있는 동안 상기 제 1 위치를 결정하기 전에, NFC(near-field communication) 또는 BT(Bluetooth) 디바이스 및/또는 위성, 셀룰러 및/또는 로컬 무선 네트워크 포지셔닝 시스템에 기초하여 초기 위치를 결정하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 1 항에 있어서,
상기 UE는 상기 열악한 포지셔닝 환경에 진입하기 전에, 위성, 셀룰러 및/또는 로컬 무선 네트워크 포지셔닝 시스템에 기초하여 상기 UE의 위치를 결정하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 1 항에 있어서,
상기 UE는 상기 열악한 포지셔닝 환경에 진입할 시 하나 또는 둘 이상의 NFC 또는 BT 디바이스들에 기초하여 상기 UE의 위치를 결정하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 1 항에 있어서,
상기 제 1 디바이스가 상기 UE보다 더 짧은 기간의 시간 동안 상기 열악한 포지셔닝 환경에 있었을 경우, 상기 제 1 위치 불확실성은 상기 UE의 상기 위치 불확실성보다 적은,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 1 항에 있어서,
상기 제 1 디바이스가 상기 UE보다 상기 열악한 포지셔닝 환경에서 더 짧은 거리를 이동하였을 경우, 상기 제 1 위치 불확실성은 상기 UE의 위치 불확실성보다 적은,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 1 항에 있어서,
상기 제 1 디바이스에 대한 거리를 결정하는 단계; 및
상기 거리가 임계치보다 적은 경우, 상기 제 1 디바이스에 대한 거리를 0으로 세팅하고, 상기 UE의 위치로서 상기 제 1 위치를 채택하는 단계를 더 포함하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 18 항에 있어서,
상기 제 1 디바이스로부터 수신된 신호의 신호 강도가 임계치를 초과하는 경우, 상기 UE는 상기 거리를 0으로 세팅하고, 상기 UE의 위치로서 상기 제 1 위치를 채택하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 1 항에 있어서,
상기 UE의 위치 불확실성은 상기 UE가 상기 열악한 포지셔닝 환경에 진입한 이후로부터 경과된 양의 시간에 기초하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 20 항에 있어서,
상기 경과된 양의 시간이 증가함에 따라, 상기 위치 불확실성은 증가하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 1 항에 있어서,
상기 UE의 위치 불확실성은 상기 UE가 상기 열악한 포지셔닝 환경에 진입한 이후로부터 이동된 추정된 거리에 기초하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 22 항에 있어서,
이동된 추정 거리가 증가함에 따라, 상기 위치 불확실성은 증가하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 1 항에 있어서,
상기 제 1 디바이스를 포함하는 복수의 디바이스들로부터 위치 정보 및 위치 불확실성들을 수신하는 단계;
상기 위치 불확실성들 중 어떤 것이 상기 UE의 위치 불확실성보다 적은지를 결정하는 단계; 및
상기 UE의 위치 불확실성보다 적은 위치 불확실성을 갖는 상기 복수의 디바이스들 각각의 위치들에 기초하여 상기 UE의 위치를 결정하는 단계를 더 포함하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 1 항에 있어서,
결정된 위치들, 수신된 위치들 및 위치 불확실성 레벨들의 히스토리를 저장하는 단계; 및
상기 히스토리를 서버에 송신하는 단계를 더 포함하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 제 25 항에 있어서,
상기 서버는 어떤 UE 또는 제 1 디바이스가 상기 열악한 포지셔닝 환경에 진입하기 전에 위치를 결정하였는지에 기초하여 하나 또는 둘 이상의 지상 액세스 포인트들의 위치를 검증하기 위해 상기 히스토리를 이용하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 방법. - 하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 장치로서,
제 1 디바이스로부터 상기 제 1 디바이스의 제 1 위치 및 제 1 위치 불확실성을 수신하도록 구성되는 로직;
상기 제 1 위치 불확실성이 상기 UE의 위치 불확실성보다 적은지 아닌지를 결정하도록 구성되는 로직; 및
상기 제 1 위치 불확실성이 상기 UE의 위치 불확실성보다 적은 경우, 상기 제 1 디바이스의 위치 및 상기 제 1 디바이스에 대한 거리에 기초하여 상기 UE의 위치를 결정하도록 구성되는 로직을 포함하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 장치. - 제 27 항에 있어서,
상기 제 1 디바이스의 상기 제 1 위치 및 상기 제 1 위치 불확실성은 다이렉트 피어-투-피어 라디오 통신들을 이용하여 상기 UE에 의해 수신되는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 장치. - 제 27 항에 있어서,
상기 제 1 디바이스가 상기 UE보다 더 짧은 기간의 시간 동안 상기 열악한 포지셔닝 환경에 있었을 경우, 상기 제 1 위치 불확실성은 상기 UE의 상기 위치 불확실성보다 적은,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 장치. - 제 27 항에 있어서,
상기 제 1 디바이스가 상기 UE보다 상기 열악한 포지셔닝 환경에서 더 짧은 거리를 이동하였을 경우, 상기 제 1 위치 불확실성은 상기 UE의 위치 불확실성보다 적은,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 장치. - 제 27 항에 있어서,
상기 제 1 디바이스에 대한 거리를 결정하도록 구성되는 로직; 및
상기 거리가 임계치보다 적은 경우, 상기 제 1 디바이스에 대한 거리를 0으로 세팅하고, 상기 UE의 위치로서 상기 제 1 위치를 채택하도록 구성되는 로직을 더 포함하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 장치. - 제 27 항에 있어서,
상기 제 1 디바이스를 포함하는 복수의 디바이스들로부터 위치 정보 및 위치 불확실성들을 수신하도록 구성되는 로직;
상기 위치 불확실성들 중 어떤 것이 상기 UE의 위치 불확실성보다 적은지를 결정하도록 구성되는 로직; 및
상기 UE의 위치 불확실성보다 적은 위치 불확실성을 갖는 상기 복수의 디바이스들 각각의 위치들에 기초하여 상기 UE의 위치를 결정하도록 구성되는 로직을 더 포함하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 장치. - 제 27 항에 있어서,
결정된 위치들, 수신된 위치들 및 위치 불확실성 레벨들의 히스토리를 저장하도록 구성되는 로직; 및
상기 히스토리를 서버에 송신하도록 구성되는 로직을 더 포함하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 장치. - 하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 장치로서,
제 1 디바이스로부터 상기 제 1 디바이스의 제 1 위치 및 제 1 위치 불확실성을 수신하기 위한 수단;
상기 제 1 위치 불확실성이 상기 UE의 위치 불확실성보다 적은지 아닌지를 결정하기 위한 수단; 및
상기 제 1 위치 불확실성이 상기 UE의 위치 불확실성보다 적은 경우, 상기 제 1 디바이스의 위치 및 상기 제 1 디바이스에 대한 거리에 기초하여 상기 UE의 위치를 결정하기 위한 수단을 포함하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 장치. - 제 34 항에 있어서,
상기 제 1 디바이스의 상기 제 1 위치 및 상기 제 1 위치 불확실성은 다이렉트 피어-투-피어 라디오 통신들을 이용하여 상기 UE에 의해 수신되는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 장치. - 제 34 항에 있어서,
상기 제 1 디바이스가 상기 UE보다 더 짧은 기간의 시간 동안 상기 열악한 포지셔닝 환경에 있었을 경우, 상기 제 1 위치 불확실성은 상기 UE의 상기 위치 불확실성보다 적은,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 장치. - 제 34 항에 있어서,
상기 제 1 디바이스가 상기 UE보다 상기 열악한 포지셔닝 환경에서 더 짧은 거리를 이동하였을 경우, 상기 제 1 위치 불확실성은 상기 UE의 위치 불확실성보다 적은,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 장치. - 제 34 항에 있어서,
상기 제 1 디바이스에 대한 거리를 결정하기 위한 수단; 및
상기 거리가 임계치보다 적은 경우, 상기 제 1 디바이스에 대한 거리를 0으로 세팅하고, 상기 UE의 위치로서 상기 제 1 위치를 채택하기 위한 수단을 더 포함하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 장치. - 제 34 항에 있어서,
상기 제 1 디바이스를 포함하는 복수의 디바이스들로부터 위치 정보 및 위치 불확실성들을 수신하기 위한 수단;
위치 불확실성들 중 어떤 것이 상기 UE의 위치 불확실성보다 적은지를 결정하기 위한 수단; 및
상기 UE의 위치 불확실성보다 적은 위치 불확실성을 갖는 상기 복수의 디바이스들 각각의 위치들에 기초하여 상기 UE의 위치를 결정하기 위한 수단을 더 포함하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 장치. - 제 34 항에 있어서,
결정된 위치들, 수신된 위치들 및 위치 불확실성 레벨들의 히스토리를 저장하기 위한 수단; 및
상기 히스토리를 서버에 송신하기 위한 수단을 더 포함하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 장치. - 하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 비-일시적 컴퓨터 판독가능한 매체로서,
제 1 디바이스로부터 상기 제 1 디바이스의 제 1 위치 및 제 1 위치 불확실성을 수신하기 위한 적어도 하나의 명령;
상기 제 1 위치 불확실성이 상기 UE의 위치 불확실성보다 적은지 아닌지를 결정하기 위한 적어도 하나의 명령; 및
상기 제 1 위치 불확실성이 상기 UE의 위치 불확실성보다 적은 경우, 상기 제 1 디바이스의 위치 및 상기 제 1 디바이스에 대한 거리에 기초하여 상기 UE의 위치를 결정하기 위한 적어도 하나의 명령을 포함하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 비-일시적 컴퓨터 판독가능한 매체. - 제 41 항에 있어서,
상기 제 1 디바이스의 상기 제 1 위치 및 상기 제 1 위치 불확실성은 다이렉트 피어-투-피어 라디오 통신들을 이용하여 상기 UE에 의해 수신되는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 비-일시적 컴퓨터 판독가능한 매체. - 제 41 항에 있어서,
상기 제 1 디바이스가 상기 UE보다 더 짧은 기간의 시간 동안 상기 열악한 포지셔닝 환경에 있었을 경우, 상기 제 1 위치 불확실성은 상기 UE의 상기 위치 불확실성보다 적은,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 비-일시적 컴퓨터 판독가능한 매체. - 제 41 항에 있어서,
상기 제 1 디바이스가 상기 UE보다 상기 열악한 포지셔닝 환경에서 더 짧은 거리를 이동하였을 경우, 상기 제 1 위치 불확실성은 상기 UE의 위치 불확실성보다 적은,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 비-일시적 컴퓨터 판독가능한 매체. - 제 41 항에 있어서,
상기 제 1 디바이스에 대한 거리를 결정하기 위한 적어도 하나의 명령; 및
상기 거리가 임계치보다 적은 경우, 상기 제 1 디바이스에 대한 거리를 0으로 세팅하고, 상기 UE의 위치로서 상기 제 1 위치를 채택하기 위한 적어도 하나의 명령을 더 포함하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 비-일시적 컴퓨터 판독가능한 매체. - 제 41 항에 있어서,
상기 제 1 디바이스를 포함하는 복수의 디바이스들로부터 위치 정보 및 위치 불확실성들을 수신하기 위한 적어도 하나의 명령;
상기 위치 불확실성들 중 어떤 것이 상기 UE의 위치 불확실성보다 적은지를 결정하기 위한 적어도 하나의 명령; 및
상기 UE의 위치 불확실성보다 적은 위치 불확실성을 갖는 상기 복수의 디바이스들 각각의 위치들에 기초하여 상기 UE의 위치를 결정하기 위한 적어도 하나의 명령을 더 포함하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 비-일시적 컴퓨터 판독가능한 매체. - 제 41 항에 있어서,
결정된 위치들, 수신된 위치들 및 위치 불확실성 레벨들의 히스토리를 저장하기 위한 적어도 하나의 명령; 및
상기 히스토리를 서버에 송신하기 위한 적어도 하나의 명령을 더 포함하는,
하나 또는 둘 이상의 디바이스들의 위치들에 기초하여 열악한 포지셔닝 환경에서 사용자 장비(UE)의 위치를 결정하기 위한 비-일시적 컴퓨터 판독가능한 매체.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/827,024 | 2013-03-14 | ||
| US13/827,024 US20140274111A1 (en) | 2013-03-14 | 2013-03-14 | Inter-device transfer of accurate location information |
| PCT/US2014/024578 WO2014159649A1 (en) | 2013-03-14 | 2014-03-12 | Inter-device transfer of accurate location information |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20150129818A true KR20150129818A (ko) | 2015-11-20 |
Family
ID=50424778
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020157028724A KR20150129818A (ko) | 2013-03-14 | 2014-03-12 | 정확한 위치 정보의 디바이스-간 전달 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20140274111A1 (ko) |
| EP (1) | EP2972454A1 (ko) |
| JP (1) | JP2016520799A (ko) |
| KR (1) | KR20150129818A (ko) |
| CN (1) | CN105190344B (ko) |
| WO (1) | WO2014159649A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022154558A1 (ko) * | 2021-01-14 | 2022-07-21 | 삼성전자 주식회사 | 위치 탐색을 위한 전자 장치, 방법 및 비 일시적 저장 매체 |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8958819B2 (en) * | 2012-12-11 | 2015-02-17 | Transpacific Ip Management Group Ltd. | Femto-assisted location estimation in macro-femto heterogeneous networks |
| US10177915B2 (en) | 2013-03-15 | 2019-01-08 | Ologn Technologies Ag | Systems, methods and apparatuses for device attestation based on speed of computation |
| US9698991B2 (en) | 2013-03-15 | 2017-07-04 | Ologn Technologies Ag | Systems, methods and apparatuses for device attestation based on speed of computation |
| US9456344B2 (en) | 2013-03-15 | 2016-09-27 | Ologn Technologies Ag | Systems, methods and apparatuses for ensuring proximity of communication device |
| JP2014197759A (ja) * | 2013-03-29 | 2014-10-16 | 富士通株式会社 | プレゼンス管理方法、情報処理装置およびプログラム |
| EP2995061B1 (en) | 2013-05-10 | 2018-04-18 | OLogN Technologies AG | Ensuring proximity of wifi communication devices |
| US9258679B1 (en) * | 2013-07-15 | 2016-02-09 | Google Inc. | Modifying a history of geographic locations of a computing device |
| US9455998B2 (en) | 2013-09-17 | 2016-09-27 | Ologn Technologies Ag | Systems, methods and apparatuses for prevention of relay attacks |
| EP2924469A1 (en) * | 2014-03-27 | 2015-09-30 | Sinvent AS | Information system and method |
| US9215562B1 (en) * | 2014-07-28 | 2015-12-15 | Intel IP Corporation | Method and apparatus for optimized indoor position estimation |
| US9713117B2 (en) * | 2014-09-25 | 2017-07-18 | Intel Corporation | Device-to-device assisted positioning in wireless cellular technologies |
| CN105578591A (zh) * | 2014-10-10 | 2016-05-11 | 华为技术有限公司 | 定位的方法、定位服务器和终端 |
| US9847796B2 (en) * | 2014-10-17 | 2017-12-19 | The Boeing Company | Multiband wireless data transmission between aircraft and ground systems based on availability of the ground systems |
| US9667338B2 (en) | 2014-10-17 | 2017-05-30 | The Boeing Company | Multiband wireless data transmission between aircraft and ground systems |
| US10264396B2 (en) * | 2015-01-15 | 2019-04-16 | Mediatek Inc. | Method of distance measurement between wireless communication devices in wireless communication system |
| US9736631B2 (en) | 2015-08-13 | 2017-08-15 | At&T Mobility Ii Llc | Location accuracy for proximity services |
| CA3009078A1 (en) | 2015-12-21 | 2017-06-29 | Genetec Inc. | Method and system for viral identification of evacuees |
| CN106161607B (zh) * | 2016-06-30 | 2019-05-10 | 重庆尚渝网络科技有限公司 | 设备在隧道和机车上的网络系统 |
| CN107144858A (zh) * | 2017-05-05 | 2017-09-08 | 中国科学院光电研究院 | 一种终端协同的北斗单星搜救定位方法 |
| CN107454569B (zh) * | 2017-07-03 | 2020-06-05 | 中国联合网络通信集团有限公司 | 一种单车、云平台及校准单车的位置信息的方法 |
| US10267891B1 (en) * | 2017-09-27 | 2019-04-23 | The United States Of America As Represented By The Secretary Of The Air Force | Rapid transfer of GNSS information from advantaged platform |
| CN108093367B (zh) * | 2017-12-13 | 2020-01-21 | Oppo广东移动通信有限公司 | 基于定位模块的控制方法、装置、存储介质及移动终端 |
| CN108663665B (zh) * | 2018-04-03 | 2020-03-31 | 北京环境特性研究所 | 一种确定紧缩场的不确定度的方法及装置 |
| US10904828B2 (en) * | 2018-05-09 | 2021-01-26 | Position Location and Repeaters PRB | Aligning GNSS location determination with wireless wide area network paging slots |
| EP3668197B1 (en) | 2018-12-12 | 2021-11-03 | Rohde & Schwarz GmbH & Co. KG | Method and radio for setting the transmission power of a radio transmission |
| CN110366243A (zh) * | 2019-07-30 | 2019-10-22 | 深圳市微能信息科技有限公司 | 一种基于蓝牙aoa基站定位方法及装置 |
| CN116391134A (zh) * | 2020-10-12 | 2023-07-04 | 惠普发展公司,有限责任合伙企业 | 锚位置校准 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6275707B1 (en) * | 1999-10-08 | 2001-08-14 | Motorola, Inc. | Method and apparatus for assigning location estimates from a first transceiver to a second transceiver |
| JP3479885B2 (ja) * | 2000-11-07 | 2003-12-15 | 日本電気株式会社 | 移動端末を用いた測位方法及び測位機能を有する移動端末 |
| US7489240B2 (en) * | 2005-05-03 | 2009-02-10 | Qualcomm, Inc. | System and method for 3-D position determination using RFID |
| CN100541134C (zh) * | 2006-11-09 | 2009-09-16 | 复旦大学 | 利用gps与陀螺仪、里程计的组合定位方法与装置 |
| DE102006056338A1 (de) * | 2006-11-29 | 2008-06-05 | Rohde & Schwarz Gmbh & Co. Kg | Verfahren und Vorrichtung zur Bestimmung der Position eines Endgeräts in einem Mobilfunknetz |
| CN201016741Y (zh) * | 2007-02-09 | 2008-02-06 | 江苏新科数字技术有限公司 | Gps/ins组合定位导航系统 |
| CN100476361C (zh) * | 2007-04-20 | 2009-04-08 | 北京航空航天大学 | 一种航空用组合导航系统体系结构实现方法 |
| US8125332B2 (en) * | 2008-11-21 | 2012-02-28 | Zoombak, Inc. | Geo-fence with minimal false alarms |
| JP5353309B2 (ja) * | 2009-03-05 | 2013-11-27 | 日本電気株式会社 | 端末の位置分布の推定方法、移動端末、ネットワークシステム、サーバ、及びプログラム |
| US8823585B2 (en) * | 2010-02-12 | 2014-09-02 | Broadcom Corporation | Sensor-assisted location-aware mobile device |
| US8787184B2 (en) * | 2010-02-12 | 2014-07-22 | Broadcom Corporation | Collaborative sharing of location information among devices in a network |
| US8587476B2 (en) * | 2010-05-11 | 2013-11-19 | Blackberry Limited | System and method for providing location information on mobile devices |
| US9107040B2 (en) * | 2010-09-29 | 2015-08-11 | Apple Inc. | Systems, methods, and computer readable media for sharing awareness information |
| US20130231889A1 (en) * | 2012-03-01 | 2013-09-05 | Lockheed Martin Corporation | Method and apparatus for an inertial navigation system |
| US9277524B2 (en) * | 2012-04-20 | 2016-03-01 | Blackberry Limited | Cooperative localization of portable electronic devices |
-
2013
- 2013-03-14 US US13/827,024 patent/US20140274111A1/en not_active Abandoned
-
2014
- 2014-03-12 EP EP14714896.9A patent/EP2972454A1/en not_active Withdrawn
- 2014-03-12 WO PCT/US2014/024578 patent/WO2014159649A1/en active Application Filing
- 2014-03-12 KR KR1020157028724A patent/KR20150129818A/ko not_active Application Discontinuation
- 2014-03-12 JP JP2016501579A patent/JP2016520799A/ja active Pending
- 2014-03-12 CN CN201480013957.8A patent/CN105190344B/zh not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022154558A1 (ko) * | 2021-01-14 | 2022-07-21 | 삼성전자 주식회사 | 위치 탐색을 위한 전자 장치, 방법 및 비 일시적 저장 매체 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20140274111A1 (en) | 2014-09-18 |
| WO2014159649A1 (en) | 2014-10-02 |
| JP2016520799A (ja) | 2016-07-14 |
| EP2972454A1 (en) | 2016-01-20 |
| CN105190344B (zh) | 2017-07-04 |
| CN105190344A (zh) | 2015-12-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20150129818A (ko) | 정확한 위치 정보의 디바이스-간 전달 | |
| US9282435B2 (en) | Location spoofing detection | |
| CN106662453B (zh) | 用于根据传感器和射频测量进行基于移动的实时定位的方法和设备 | |
| US9188659B2 (en) | Methods and network nodes for positioning based on displacement data | |
| US9002349B2 (en) | Post-deployment calibration for wireless position determination | |
| EP2909646B1 (en) | Changing a position determination scheme used by a user equipment during a transition between indoor and outdoor spaces relative to an enclosed environment | |
| US20180091939A1 (en) | Geofenced access point measurement data collection | |
| US9832615B2 (en) | Mobile device sensor and radio frequency reporting techniques | |
| US10321269B2 (en) | Base station selection for positioning/localization based on an indication of capacity | |
| US20140274119A1 (en) | Method and apparatus for indoor positioning based on wireless landmarks | |
| US10659921B2 (en) | Measurement batching | |
| US10502840B2 (en) | Outlier detection for satellite positioning system using visual inertial odometry | |
| BRPI0411911B1 (pt) | método e equipamento para posicionamento híbrido de rede sem fio | |
| KR102188688B1 (ko) | 사용자 장비에 대한 시간 교정 값의 결정 | |
| EP3925335A1 (en) | Systems and methods for location by a mobile device in a fifth generation wireless network | |
| US9699757B2 (en) | Small cell assisted location identification for a user device | |
| KR20210003743A (ko) | 모바일 디바이스에서 복수의 주파수들 상의 신호들을 측정하기 위한 방법 및 장치 | |
| US20180324616A1 (en) | Generating location data while conserving resources |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WITN | Application deemed withdrawn, e.g. because no request for examination was filed or no examination fee was paid |