KR20130142348A - 스마트 전기자동차 및 이의 운용방법 - Google Patents
스마트 전기자동차 및 이의 운용방법 Download PDFInfo
- Publication number
- KR20130142348A KR20130142348A KR1020120065492A KR20120065492A KR20130142348A KR 20130142348 A KR20130142348 A KR 20130142348A KR 1020120065492 A KR1020120065492 A KR 1020120065492A KR 20120065492 A KR20120065492 A KR 20120065492A KR 20130142348 A KR20130142348 A KR 20130142348A
- Authority
- KR
- South Korea
- Prior art keywords
- control
- smart
- vehicle
- driving
- torque
- Prior art date
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/10—Dynamic electric regenerative braking
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/423—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/54—Drive Train control parameters related to batteries
- B60L2240/547—Voltage
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/24—Driver interactions by lever actuation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/26—Driver interactions by pedal actuation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/91—Electric vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/16—Information or communication technologies improving the operation of electric vehicles
Abstract
본 발명의 스마트 전기자동차는 틸트센서(71)와 HDC버튼(72)과 연계되어 험한 비탈길에서 내리막 주행을 부드럽게 하여 안전을 확보해주는 하강주행제어(HDC; Hill Decent Control)가 구현되는 SCU(100,Smart Control Unit)와, VCU(11,Vehicle Control Unit), ABS(20,Anti Brake System) 및 MDPS(30,Motor Driven Power Steering)와 CAN네트워크(200)로 상호 통신하고, HDC구현 시 배터리 전압레벨에 따라 모터(13)의 토크를 단독으로 제어하거나 ABS(20)와 분담하여 제어하는 운용 알고리즘을 구현하는 MCU(12,Motor Control Unit)가 포함됨으로써, 험한 비탈길에서 내리막 주행이 운전자의 브레이크 페달(52)의 조작 없이도 부드럽고 안전하게 구현되는 특징을 갖는다.
Description
본 발명은 전기자동차에 관한 것으로, 특히 험한 비탈길에서 내리막 주행을 부드럽게 하여 안전을 확보해주는 하강주행제어(HDC; Hill Decent Control)가 브레이크 페달의 조작 없이도 구현될 수 있는 스마트 전기자동차 및 이의 운용방법에 관한 것이다.
일반적으로 자동차는 고속주행이나 저속주행 또는 주차 이동이든 다양한 외부환경의 지배를 받으면서 운행될 수밖에 없고, 운전자는 이러한 다양한 외부환경에 대해 적극적으로 대응해 자동차를 제어함으로써 어떠한 사고 없이 안전운행을 하게 된다.
하지만, 자동차의 안전운행 여부가 운전자 개개인의 운전 실력과 상황대처능력에 전적으로 의존되면, 생활필수품으로 취급되고 있는 자동차에 대한 운전 미숙자의 접근성이 제한될 수밖에 없다.
그러므로, 운전자의 적극적인 대처 없이도 안전운행이 확보될 수 있도록 발전된 전자 및 제어기술을 기반으로 한 다양한 차량제어기술들이 자동차에 적용됨으로써, 자동차에 대한 운전 미숙자의 접근성을 높이고 특히 운전 능숙자의 제어편리성도 함께 높여 주게 된다.
통상, 상기와 같은 다양한 차량제어기술들을 적용한 자동차는 스마트 자동차로 칭한다.
스마트 자동차에 적용된 차량제어기술의 예로서, 스마트주행제어(ASCC; Advanced Smart Cruse Control)와, 비상제동제어(AEBS; Auto Emergence Braking System), 등판주행제어(HSA; Hill Start Assist), 하강주행제어(HDC; Hill Decent Control), 주차조향제어(SPAS; Smart Parking Assist System) 및 주차보조제어(PAS; Parking Assist System)를 들 수 있다.
상기 스마트주행제어(ASCC)는 주행 시 운전자의 페달조작 없이 주행속도를 자동으로 유지하면서 선행차량과 차간거리도 유지해 안전을 확보해주는 기능이다.
상기 비상제동제어(AEBS)는 주행 시 운전자의 조작 없이도 선행차량과 형성하는 차간거리를 안전하게 확보해주는 기능이다.
상기 등판주행제어(HSA)는 오르막길에서 정지 후 출발할 때 밀림방지로 안전을 확보해주는 기능이고, 상기 하강주행제어(HDC)는 험한 비탈길에서 내리막 주행을 부드럽게 하여 안전을 확보해주는 기능이다.
상기 주차조향제어(SPAS)는 주차 시 변속레버의 시프트 변속 없이도 편리한 후방 주차기능이고, 상기 주차보조제어(PAS)는 돌발적인 장애물의 등장에 대해서도 신속하게 대응해주는 후방 주차기능이다.
이하, 상기 스마트주행제어(ASCC)는 ASCC로 칭하고, 상기 비상제동제어(AEBS)는 AEBS로 칭하며, 상기 등판주행제어(HSA)는 HSA로 칭하고, 상기 하강주행제어(HDC)는 HDC로 칭하고, 상기 주차조향제어(SPAS)는 SPAS로 칭하고, 상기 주차보조제어(PAS)는 PAS로 칭한다.
그러나, ASCC와, AEBS, HSA, HDC, SPAS 및 PAS와 같은 스마트 기능들은 실차에 적용되기 위해선 자동차의 운행에 관련된 전자기기와 협조 제어되도록 특화되어야 하고, 이러한 측면은 친환경차량으로 현재 크게 부각되고 있는 전기자동차에 대한 실차 적용성을 크게 제한하게 된다.
이중 가장 큰 이유는 전기자동차는 내연기관타입 자동차와 달리 변속기(Transmission)가 없음에 기인된다.
일례로, 주행속도를 변화시키기 위해 변속레버를 조작하면, 내연기관타입 자동차에서는 변속레버의 조작이 변속기의 기어단 변환을 가져오는데 반해, 전기자동차에서는 기어단 변환이 아닌 모터 토크 변환을 가져온다.
이에 따라, 전기자동차가 스마트 전기자동차로 개발 및 상품화되기 위해선 ASCC와, AEBS, HSA, HDC, SPAS 및 PAS등이 동력원인 모터와 연계되도록 특화되어야 하고, 특히 모터의 토크제어를 스마트 기능에 맞춰 최적화할 수 있는 기술의 개발이 요구될 수밖에 없다.
상기 특허문헌은 후륜용 모터가 구비된 하이브리드 자동차에서 조향각(또는 선회각)을 기반으로 한 모터 토크의 최적 제어가 구현됨으로써, 하이브리드 차량에서도 스마트 개념(Smart Concept)이 적용될 수 있음을 나타낸다.
이를 위해, 상기 특허문헌은 운전자 요구파워와 차량 속도 및 배터리 SOC를 기반으로 모터보조 수행여부가 판단되고, 조향각과 조향각 변화율 및 차량 속도를 모니터링한 후 조향각이 기준값 이상인지(급선회)여부가 판단되며, 기준값 이상의 조향각에 따른 최대 및 최소계수와 조향각 변화율에 따른 최대 및 최소계수를 계산한 다음 필요한 모터 보조량이 결정되고, 결정된 모터 보조량에 운전자 요구파워와 차량 속도 및 배터리 SOC 조건들을 합산함으로써 모터 토크가 최적 제어된다.
그러므로, 상기 특허문헌은 모터의 토크제어를 통해서 주행시 운전자의 조작 없이도 주행안전을 확보해주는 ASCC와 같은 스마트 기능이 구현될 수 있고, 이로부터 모터를 동력원으로 하는 전기자동차가 스마트 전기 자동차로 개발될 수 있음을 나타낸다.
하지만, 전기자동차가 스마트 전기자동차로 개발되기 위해선 모터의 토크제어만으로는 충분할 수 없고, 특히 전기자동차의 운행에 관련된 전자기기와 협조 제어되기 위한 모터 토크 제어기술이 더 요구될 수밖에 없다.
이에 상기와 같은 점을 감안하여 발명된 본 발명은 주행시 운전자의 페달조작 없이 주행속도를 자동으로 유지하면서 선행차량과 차간거리도 유지해 안전을 확보해주는 ASCC나 또는 주행시 운전자의 조작 없이도 선행차량과 형성하는 차간거리를 안전하게 확보해주는 AEBS나 또는 오르막길에서 정지후 출발할 때 밀림방지로 안전을 확보해주는 HSA나 또는 험한 비탈길에서 내리막 주행을 부드럽게 하여 안전을 확보해주는 HDC나 또는 주차 시 변속레버의 시프트 변속 없이도 편리한 후방 주차기능을 제공해주는 SPAS나 또는 돌발적인 장애물의 등장에 대해서도 토크제어로 신속하게 대응해주는 편리한 후방주차기능을 제공해주는 PAS와 같은 스마트 기능이 구현됨으로써, 내연기관 자동차와 같이 스마트 차량제어기술이 적용되어 상품화될 수 있는 스마트 전기자동차 및 이의 운용방법을 제공하는데 목적이 있다.
또한, 상기와 같은 점을 감안하여 발명된 본 발명은 험한 비탈길에서 내리막 주행을 부드럽게 하여 안전을 확보해주는 HDC가 브레이크 페달의 조작 없이도 구현될 수 있는 스마트 전기자동차 및 이의 운용방법을 제공하는데 또 다른 목적이 있다.
상기와 같은 목적을 달성하기 위한 본 발명의 스마트 전기자동차는 배터리 전력을 이용해 동력을 발생하는 모터와, 차량을 최상위레벨에서 제어하는 VCU(Vehicle Control Unit)와, 차량 제동을 수행하는 ABS(Anti Brake System)와, 차량 조향을 수행하는 MDPS(Motor Driven Power Steering)와, 차량의 상태를 운전자에게 보여주는 HMI(Human Machine Interface)과 상호 통신하는 CAN네트워크와;
차량의 변속단을 변경하는 변속레버와;
차량 가속을 위한 가속페달과 차량 제동을 위한 브레이크페달과;
상기 CAN네트워크로 상호 통신하고, HDC버튼의 조작신호와 틸트센서의 경사각 검출신호가 처리되는 LIN네트워크를 갖추고, 상기 CAN네트워크를 이용한 상호 통신으로 험한 비탈길에서 내리막 주행을 부드럽게 하여 안전을 확보해주는 하강주행제어(HDC; Hill Decent Control)가 수행되는 SCU(Smart Control Unit)와;
상기 CAN네트워크로 상호 통신하고, 상기 하강주행제어 실행시 상기 배터리 전압레벨에 따라 제어되는 상기 모터의 토크를 단독으로 제어하거나 상기 ABS와 분담하여 제어하는 운용 알고리즘을 갖춘 MCU(Motor Control Unit); 가 포함된 것을 특징으로 한다.
상기 운용 알고리즘은 하강주행제어에 더해 주행시 운전자의 조작 없이도 주행안전을 확보해주는 스마트주행제어모드와, 운전자의 조작 없이도 선행차량과 형성하는 차간거리를 안전하게 확보해주는 비상제동제어모드와, 오르막길에서 정지후 출발할 때 밀림방지로 안전을 확보해주는 등판주행제어모드와, 주차 시 변속레버의 시프트 변속 없이도 편리한 후방 주차기능을 제공해주는 주차조향제어모드와, 후방 주차 시 돌발적인 장애물의 등장에 대해서도 토크제어로 신속하게 대응해주는 주차보조제어모드가 더 포함되는 것을 특징으로 한다.
또한, 상기와 같은 목적을 달성하기 위한 본 발명의 스마트 전기자동차의 운용방법은 버튼의 온(On)조작신호를 감지한 SCU(Smart Control Unit)가 험한 비탈길에서 내리막 주행을 부드럽게 하여 안전을 확보해주는 하강주행제어(HDC; Hill Decent Control)를 준비하는 스마트하강주행진입단계;
차량을 최상위레벨에서 제어하는 VCU(Vehicle Control Unit)가 CAN네트워크를 이용해 상기 SCU와 상호 통신하여 상기 하강주행제어의 시작을 인식하고, 틸트센서에서 제공되는 경사각 정보로 도로의 경사각을 판단하는 스마트하강주행준비단계;
상기 경사각이 기준레벨(Reference Level)을 초과하면, 상기 VCU가 모터를 제어하는 MCU(Motor Control Unit)와 상기 CAN네트워크를 이용해 상호 통신하고, 상기 MCU의 연산된 모터속도가 상기 VCU로 제공되고, 상기 VCU는 상기 연산된 모터속도로부터 보상토크를 계산해 상기 MCU로 다시 제공하며, 상기 MCU는 상기 보상토크로 상기 모터의 토크를 제어하는 스마트하강주행제어단계;
배터리의 충전상태가 체크되고, 하강주행을 위한 감속에서 운전자의 조작 없이도 상기 배터리의 충전상태에 따라 회생제동이 구현되는 회생제동제어단계; 상기 SCU에서 상기 버튼의 오프(Off)조작신호를 감지하거나 상기 VCU에서 브레이크페달의 신호가 감지되면, 상기 하강주행제어가 중지되는 스마트하강주행중지단계;
가 포함되어 실행되는 것을 특징으로 한다.
상기 스마트하강주행제어단계에서, 상기 VCU에는 상기 보상토크를 상기 MCU로 다시 제공하도록 PI(Proportion and Integration)타입 속도PI제어기가 포함되고, 상기 MCU에는 상기 모터속도를 상기 VCU로 제공하도록 3상PWM블록과 3상을 2상으로 변환하는 3/2변환기 및 2상을 3상으로 변환하는 2/3변환기와 PI(Proportion and Integration)타입 전류PI제어기가 포함된다.
상기 회생제동제어단계에서, 상기 배터리의 충전상태가 과 방전이나 과 충전이 아닌 정상 충전 상태일 때 상기 회생제동이 구현되고, 상기 배터리의 충전상태가 과 방전이나 과 충전 상태일 때 상기 회생제동이 구현되지 않는다.
상기 배터리의 충전상태는 전압레벨로 판단된다.
상기 회생제동이 구현되면, 상기 MCU는 상기 보상토크를 참조값(Reference Value)으로 하고, 인버터 제어만으로 상기 모터의 토크를 제어하는 반면; 상기 회생제동이 구현되지 않으면, 상기 MCU의 인버터가 담당하는 인버터토크와 ABS(Anti Brake System)가 담당하는 ABS토크로 분담되고, 토크가 제로(Zero)가 될 때 까지 선형(Linear)적으로 토크 제한치를 낮추도록 제어된다.
상기 스마트하강주행중지단계에서, 상기 버튼의 오프(Off)조작신호와 상기 브레이크페달의 신호는 오어(Or)조건이다.
이러한 본 발명은 내연기관 자동차와 같이 스마트 차량제어기술이 전기자동차에서 실용화됨으로써, 실질적인 스마트 전기자동차를 통해 상품성이 크게 높아지고 운전자에게는 험한 비탈길에서 내리막 주행시에도 스마트 기능을 활용한 드라이빙 편의성이 제공되는 효과가 있다.
또한, 본 발명은 모터의 토크제어로직 최적화로 HDC가 구현됨으로써 브레이크 페달 조작에 따른 운전자의 불편이 해소될 수 있는 효과도 있다.
또한, 본 발명은 모터의 토크제어로직 최적화만으로 HDC가 작동됨으로써, 스마트 전기자동차 구축 시 기기에 대한 설계 변경 없이 그대로 적용될 수 있어 비용 상승 요인이 제거되는 효과도 있다.
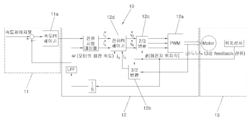
도 1은 본 발명에 따른 스마트 전기자동차의 구성도이고, 도 2는 본 발명에 따른 운용 알고리즘을 구현하기 위한 VCU(Vehicle Control Unit)과 MCU(Motor Control Unit) 및 모터의 제어블록도이며, 도 3은 본 발명에 따른 스마트 전기자동차에 적용된 운용 알고리즘이고, 도 4는 본 발명에 따른 스마트 전기자동차의 험한 비탈길에서 내리막 주행을 부드럽게 하여 안전을 확보해주는 하강주행제어(HDC; Hill Decent Control)를 위한 제어로직이며, 도 5는 본 발명에 따른 하강주행제어(HDC; Hill Decent Control)가 실행되는 스마트 전기자동차의 작동상태이고, 도 6은 본 발명에 따른 하강주행제어(HDC; Hill Decent Control)시 고전압 배터리의 전압레벨(Voltage Level)로 회생제동에너지를 제한하기 위한 토크 제한치 곡선선도이다.
이하 본 발명의 실시예를 첨부된 예시도면을 참조로 상세히 설명하며, 이러한 실시예는 일례로서 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자가 여러 가지 상이한 형태로 구현될 수 있으므로, 여기에서 설명하는 실시예에 한정되지 않는다.
도 1은 본 실시예에 따른 스마트 전기자동차의 구성을 나타낸다.
도시된 바와 같이, 스마트 전기자동차(1)는 고전압 배터리 전력을 이용해 동력을 발생하는 동력유닛(10)과, 차량 제동을 수행하는 ABS(20, Anti Brake System)와, 차량 조향을 수행하는 MDPS(30, Motor Driven Power Steering)와, 차량 주행속도 변경을 위한 변속레버(40)와, 차량을 가속 및 감속하기 위한 페달유닛(50)과, 운전석을 이루어 다양한 정보들을 디스플레이하는 HMI(60,Human Machine Interface)와, 주행도로의 노면상태를 검출하여 제공하는 노면검출센서(70)와, 주행환경변화에 능동적으로 대처함으로써 운전자의 적극적인 대처 없이도 안전운행을 확보해 주는 SCU(100, Smart Control Unit)과, 동력유닛(10)이 SCU(100)과 상호통신하기 위한 CAN네트워크(200)와, SCU(100)의 내부 통신을 위한 LIN네트워크(300)를 포함된다.
상기 동력유닛(10)은 차량 제어를 위한 최상위 레벨에서 변속단 정보와 차량 가속 및 차량 감속 정보가 포함된 다양한 정보로 차량을 제어하는 VCU(11, Vehicle Control Unit)와, VCU(11)에 연계되어 모터 토크를 제어하는 MCU(12, Motor Control Unit)와, MCU(12)의 제어로 모터 출력이 변화되는 모터(13)로 구성된다.
이러한 구성은 일반적인 전기자동차에 구비된 동력유닛의 구성과 동일하다.
하지만, 본 실시예에서 상기 VCU(11)는 스마트 전기자동차를 구현하도록 모터(13)를 제어하는 토크제어로직이 더 구현되는 차이가 있다.
상기 VCU(11)에서 구현되는 토크제어로직은 스마트 기능인 ASCC나 또는 AEBS나 또는 HSA나 또는 HDC나 또는 SPAS나 또는 PAS를 위한 알고리즘과 연계되고, 이는 이후 상세히 기술된다.
전술된 바와 같이, 상기 ASCC는 주행 시 운전자의 페달조작 없이 주행속도를 자동으로 유지하면서 선행차량과 차간거리도 유지해 안전을 확보해주는 스마트주행제어(ASCC; Advanced Smart Cruse Control)기능이다.
상기 AEBS는 주행 시 운전자의 조작 없이도 선행차량과 형성하는 차간거리를 안전하게 확보해주는 비상제동제어(AEBS; Auto Emergence Braking System)기능이다.
상기 HSA는 오르막길에서 정지 후 출발할 때 밀림방지로 안전을 확보해주는 등판주행제어(HSA; Hill Start Assist)기능이고, 상기 HDC는 험한 비탈길에서 내리막 주행을 부드럽게 하여 안전을 확보해주는 하강주행제어(HDC; Hill Decent Control)기능이다.
상기 SPAS는 주차 시 변속레버의 시프트 변속 없이도 편리한 후방 주차기능을 제공하는 주차조향제어(SPAS; Smart Parking Assist System)기능이고, 상기 PAS는 후방 주차 시 돌발적인 장애물의 등장에 대해서도 토크제어로 신속하게 대응해주는 주차보조제어(PAS; Parking Assist System)기능이다.
이하, 상기 스마트주행제어(ASCC)는 ASCC로 칭하고, 상기 비상제동제어(AEBS)는 AEBS로 칭하며, 상기 등판주행제어(HSA)는 HSA로 칭하고, 상기 하강주행제어(HDC)는 HDC로 칭하고, 상기 주차조향제어(SPAS)는 SPAS로 칭하고, 상기 주차보조제어(PAS)는 PAS로 칭한다.
도 2는 본 실시예에 따른 VCU(11)과 MCU(12) 및 모터(13)가 제어블록을 나타낸다.
도시된 바와 같이, 제어블록은 VCU(11)가 담당하는 역할과 MCU(12)가 담당하는 역할이 서로 분담되도록 구성되고, 상기 VCU(11)에는 PI(Proportion and Integration)타입 속도PI제어기(11a)가 포함되고, 상기 MCU(12)에는 3상PWM 제어를 위한 3상PWM블록(12a)과, 3상을 2상으로 변환하는 3/2변환기(12b)와, 2상을 3상으로 변환하는 2/3변환기(12c)와, PI(Proportion and Integration)타입 전류PI제어기(12d)가 포함된다.
이로 인해 스마트 기능이 이루어지면, MCU(12)에서는 속도가 연산되어 VCU(11)로 제공되고, VCU(11)에서는 MCU(12)에서 제공된 속도정보를 속도PI제어기(11a)의 피드백 정보로 사용해 지령 속도가 계산된 후 CAN네크워크(200)로 ASCC를 담당하는 SCU(110) 및 MDPS(30)와 상호 통신함으로써 계산된 지령 속도가 최종적으로 확정된다.
반면, 스마트 기능이 해제되면, VCU(11)가 담당하던 속도제어 기능은 비활성화 된다.
한편, 상기 ABS(20, Anti Brake System)는 휠락(Wheel Lock)을 방지하면서 제동을 수행하고, 상기 MDPS(30, Motor Driven Power Steering)는 전동식 조향장치이며, 상기 변속레버(40)는 운전자의 시프트(Shift) 및 셀렉트(Select)로 변속단을 변경하도록 시프트레버를 갖춘 변속수단으로서, 이는 일반적인 전기자동차의 구성과 동일하다.
상기 페달유닛(50)은 차량을 가속하기 위한 가속페달(51)과, 차량을 감속하기 위한 브레이크페달(52)로 구성되고, 이는 일반적인 전기자동차의 구성과 동일하다.
상기 HMI(60,Human Machine Interface)는 차량의 모든 주행상태와 함께 스마트유닛(100)을 통해 구현되는 모든 스마트 기능을 시각 및 청각으로 운전자에게 제공되도록, 일반적인 클러스터(Cluster)에 더해 디스플레이 화면과 부저등이 더 포함된다.
상기 노면검출센서(70)는 오르막길 주행 또는 내리막길 주행 상태가 판단되도록 주행도로의 노면 경사를 검출해 VCU(11)로 제공하는 틸트센서(71)와, 오르막길을 올라가기 위한 스마트 등판모드나 또는 내리막길을 내려가기 위한 스마트 하강모드가 선택될 수 있는 HDC버튼(72)으로 구성된다.
상기 틸트센서(71)의 정보와 상기 HDC버튼(72)의 신호가 VCU(11)로 제공되도록 회로가 구성되지만, 필요시 SCU(100)로 제공되도록 회로가 구성될 수 있다.
본 실시예에서 HDC버튼(72)의 신호가 VCU(11)나 또는 SCU(100)에 입력됨으로써 스마트 기능중 하나인 오르막길 주행시 안전을 확보하는 HSA가 구현되고, 또한 내리막길 주행시 안전을 확보하는 HDC가 구현될 수 있다.
통상, HSA나 HDC는 이를 위한 전용 컨트롤러로서 DSC(Decent Smart Controller)가 적용될 수 있고, SCU(100)을 구성하는 SC(110, Smart Controller)가 상기 DSC(Decent Smart Controller)를 대체할 수 있다.
한편, 상기 SCU(100)는 운전자 의지와 주행차량이 처한 외부조건에 대한 정보를 받아들여 스마트 기능이 구현되는 SC(110, Smart Controller)와, 주행차량이 처한 외부조건에 대한 정보를 검출해 SC(110)로 제공하기 위한 물체감지센서(120)와, 운전자 의지 정보를 SC(110)로 제공하기 위한 모드버튼(130)으로 구성된다.
상기 SC(110)는 ASCC와, AEBS, HSA, HDC, SPAS 및 PAS가 모두 구현될 수 있는 범용 컨트롤러로 작용한다.
하지만, 필요에 따라 상기 SC(110)는 ASCC나 또는 AEBS나 또는 HSA나 또는 HDC나 또는 SPAS나 또는 PAS가 각각 개별적으로 구현하는 컨트롤러로 작용할 수 도 있다.
일례로, ASCC에는 SC(110)대신 ASCC ECU가 적용될 수 있고, AEBS에는 SC(110)대신 ABS ECU가 적용될 수 있으며, HSA와 HDC에는 SC(110)대신 DSC ECU가 적용될 수 있고, SPAS에는 SC(110)대신 SPAS ECU가 적용될 수 있으며, PAS에는 SC(110)대신 PAS ECU가 적용될 수 있다.
그러므로, 본 실시예에서는 ASCC나 또는 AEBS나 또는 HSA나 또는 HDC나 또는 SPAS나 또는 PAS가 전기자동차용으로 별도 개발될 필요가 없고, 내연기관 자동차에 기 적용된 ASCC나 또는 AEBS나 또는 HSA나 또는 HDC나 또는 SPAS나 또는 PAS를 어떠한 기기적인 설계변경이 없이도 전기자동차에 그대로 적용될 수 있다.
한편, 상기 물체감지센서(120)는 차량의 측면에 대한 주변정보를 검출해 SCU(110)로 전송하는 사이드센서(121)와, 차량의 전방과 후방에 대한 주변정보 를 검출해 SCU(110)로 전송하는 전후방센서(122)로 구성된다.
여기서, 상기 사이드센서(121)와 상기 전후방센서(122)는 초음파센서나 레이다가 적용될 수 있으며, 통상 동일한 작용 및 효과가 달성될 수 있는 경우 제한되지 않는다.
상기 모드버튼(130)은 후진 주차 시 스마트 기능이 구현되도록 시작신호를 SC(110)로 전송하도록 ASCC 셋스위치와 레버등이 포함된 SPAS버튼(131)과, 크루즈 주행시 스마트 기능이 구현되도록 시작신호를 SC(110)로 전송하는 ASCC버튼(132)과, 비상제동시 스마트 기능이 구현되도록 시작신호를 SC(110)로 전송하는 AEBS버튼(133)을 포함한다.
여기서, 상기 SPAS버튼(131)은 SPAS 와 PAS와 연계되고, 상기 ASCC버튼(132)은 ASCC와 연계되며, 상기 AEBS버튼(133)은 AEBS와 연계된다.
상기 CAN네트워크(200)는 VCU(11)와, MCU(12), ABS(20), MDPS(30), HMI(60) 및 SC(110)사이의 내부와 외부 통신을 담당하고, 상기 LIN네트워크(300)는 SC(110)와 사이드센서(121) 및 전후방센서(122)사이의 내부 통신을 담당한다.
이를 위한 통신 프로토콜은 정해진 조건에 따라 서로 규약된다.
한편, 도 3은 본 실시예에 따른 스마트 전기자동차에 적용된 운용 알고리즘으로서, 이러한 운용 알고리즘은 VCU(11)나 또는 SC(110)에 탑재될 수 있다.
상기 운용 알고리즘은 S10의 키온(Key-On)을 통해 실행 상태로 전환되고, 운전자 의지로 입력된 S20의 모드작동신호는 S30에서 운용될 실행모드로 선택된다.
여기서, 상기 모드작동신호는 SPAS버튼(131)과, ASCC버튼(132), AEBS버튼(133) 및 HDC버튼(72)의 신호로부터 제공된다.
상기 운용 알고리즘의 실행모드는 S40의 크루즈모드와, S50의 제동모드와, S60의 하강모드와, S70의 등판모드와, S80의 주차모드 및 S90의 장애물모드로 구분된다.
본 실시예에서 정의된 상기 크루즈모드는 ASCC 구현을 위한 알고리즘이고, 상기 제동모드는 AEBS 구현을 위한 알고리즘이며, 상기 하강모드는 HDC 구현을 위한 알고리즘이고, 상기 등판모드는 HSA 구현을 위한 알고리즘이며, 상기 주차모드는 SPAS 구현을 위한 알고리즘이고, 상기 장매물모드는 PAS 구현을 위한 알고리즘이다.
상기 운용 알고리즘의 실행모드는 S100과 같이 운전자 의지를 통해 모드중지신호가 입력됨으로써 중지되고, 상기 운용 알고리즘이 중지되면 S200과 같이 또 다른 모드작동신호가 입력되기 전까지 대기상태로 유지된다.
한편, 도 4는 스마트 전기자동차에 적용된 HDC를 위한 로직으로서, 상기 HDC는 험한 비탈길에서 내리막 주행을 부드럽게 하여 안전을 확보해주는 스마트 기능을 나타낸다.
S60은 스마트 전기자동차에서 구현되는 다양한 스마트 기능 중 하강모드를 의미하고, 상기 하강모드는 S610내지 S660을 통해 실행되는 HDC로 구현된다.
S610은 HDC가 구현되는 단계로서, 이를 위해 SC(110)는 HDC버튼(72)의 조작으로 활성화되고, VCU(11)는 틸트센서(71)에서 제공되는 정보를 입력받는 상태가 된다.
이러한 상태는 도 5에 도시된 바와 같이 HDC버튼(72)의 온(On)신호(a)가 SC(110)로 입력되고, 더불어 틸트센서(71)에서 발생되는 경사각 정보(b)가 VCU(11)로 입력되며, VCU(11)가 SC(110)와 CAN네트워크(200)로 상호통신(d)함으로써 SC(110)의 활성화 상태를 인식한다.
이때, 상기 SC(110)는 DSC 컨트롤러일 수 있다.
S610에서 VCU(11)는 틸트센서(71)에서 제공된 경사각 정보(b)를 이용해 차량이 주행하는 도로의 경사각 정도를 판단하며, 이를 위해 틸트센서(71)에서 제공된 경사각 크기가 미리 설정된 기준레벨(Reference Level)을 초과하는지 판단한다.
S620은 S610의 체크 결과 경사각 > 기준레벨(Reference Level)로 판단됨으로써, VCU(11)가 모터(13)의 토크를 제어하는 스마트 하강주행제어가 구현되고, 이는 S621과 S622의 과정을 거침으로써 구현된다.
S621은 VCU(11)가 MCU(12)에서 연산된 모터속도를 제공받는 모터속도피드백(e)으로서, 이는 도 5에 도시된 바와 같이 MCU(12)가 CAN네트워크(200)를 통해 VCU(11)와 통신함으로써 실행된다.
S622은 VCU(11)가 MCU(12)에서 제공된 모터속도로부터 보상토크를 계산한 후 이를 MCU(12)에 제공하는 보상토크전달(f)로서, 이는 도 5에 도시된 바와 같이 MCU(12)가 CAN네트워크(200)를 통해 VCU(11)와 통신함으로써 실행된다.
이와 같이 VCU(11)가 MCU(12)와 연계된 피드백제어(Feedback Control)를 수행함으로써 모터(13)의 출력토크는 실시간으로 보상될 수 있다.
도 2를 참조하면, HDC의 작동 시 MCU(12)에서는 속도가 연산되어 VCU(11)로 제공되고, VCU(11)에서는 MCU(12)에서 제공된 속도정보를 속도PI제어기(11a)의 피드백 정보로 사용해 지령 속도가 계산된 후 CAN네크워크(200)로 HDC를 담당하는 SCU(110) 및 MDPS(30)와 상호 통신함으로써 계산된 지령 속도가 최종적으로 확정된다.
반면, HDC의 작동이 해제되면, VCU(11)가 담당하던 속도제어 기능은 비활성화 된다.
한편, S630은 고전압배터리의 충전상태에 따라 회생 운전시 회생량을 제한하도록 모터토크를 달리 제어하는 회생제동제어단계로서, 이를 위해 고전압 배터리의 전압레벨(Voltage Level)이 적용된다.
상기 전압레벨(Voltage Level)은 전압레벨1(Voltage Level 1)과 전압레벨2(Voltage Level 2)로 구분한다.
도 6은 회생제동 구간이 고전압 배터리의 전압레벨(Voltage Level)을 이용해 설정되는 예로서, X축은 고전압 배터리의 전압이고, Y축은 토크이며, 각각의 전압레벨(V1,V2,V3,V4)에 따라 인버터로 제한되는 토크 제한치가 예시되어 있다.
여기서, 상기 전압레벨(V1,V2,V3,V4)은 고전압배터리의 용량이 다르므로 고전압배터리의 각 용량에 맞게 설정된다.
일례로, Sec1(V1-V2)구간은 고전압 배터리의 과 방전 상태이고, Sec2(V2-V3)구간은 고전압 배터리의 정상상태이며, Sec3(V3-V4)구간은 고전압 배터리의 과 충전 상태로 구분할 수 있다.
상기 Sec1(V1-V2)구간과 상기 Sec3(V3-V4)구간은 토크가 제로(Zero)가 될때 까지 선형(Linear)적으로 토크 제한치를 낮추어야 하는 상태를 의미하고, 반면 상기 Sec2(V2-V3)구간은 회생제동에너지를 최대회생까지 낼 수 있는 상태를 의미한다.
여기서, 상기 Sec1(V1-V2)구간에서 측정된 전압레벨은 전압레벨1(Voltage Level 1)으로 정의되고, 상기 Sec3(V3-V4)구간에서 측정된 전압레벨은 전압레벨2(Voltage Level 2)로 정의한다.
S640은 고전압배터리 전압레벨이 정상상태인 경우로서, 이는 고전압배터리의 상태가 Sec2(V2-V3)구간에 위치됨으로써 차량의 감속에 따른 제동시 회생제동에너지를 최대회생까지 낼 수 있도록 모터토크가 제어될 수 있음을 나타낸다.
이러한 상태는 도 4에 도시된 바와 같이 MCU(12)가 인버터를 이용해 모터(13)를 제어하는 인버터제어(g)로서, 모터(13)의 토크제어는 기 산출된 보상토크를 참조값(Reference Value)으로 하는 MCU(12)의 인버터 제어만으로 이루어진다.
반면, S650은 고전압배터리 전압레벨이 전압레벨1(Voltage Level 1)보다 큰 값(> 전압레벨1)이거나 또는 전압레벨2(Voltage Level 2)보다 작은 값(< 전압레벨2)인 경우로서, 이는 고전압배터리의 상태가 Sec1(V1-V2)구간이나 또는 Sec3(V3-V4)구간에 위치됨으로써 제동 시 회생제동에너지를 고려하지 않고 모터토크가 제어되어야 함을 나타낸다.
이러한 상태는 도 5에 도시된 바와 같이 MCU(12)가 ABS(20)와 함께 연계되어 모터(13)를 제어하는 ABS협조제어(h)로서, 모터(13)의 토크제어는 MCU(12)의 인버터가 담당하는 인버터토크와 ABS(20)가 담당하는 ABS토크로 분담되고, 토크가 제로(Zero)가 될때 까지 선형(Linear)적으로 토크 제한치를 낮추도록 제어된다.
한편, S660은 VCU(11)에서 HDC 기능의 중지를 인식하는 단계로서, 이를 위해 HDC버튼(80)의 오프(Off)나 또는 브레이크의 조작여부가 적용된다.
이러한 상태는 도 5에 도시된 바와 같이 HDC버튼(72)의 오프(Off)신호(i)가 SC(110)에 입력되거나 또는 브레이크페달(52)의 조작으로 인해 브레이크신호(j)가 VCU(11)에 입력되는 경우이다.
S660에서 HDC 기능의 중지가 요정되면, S490과 같이 HDC 기능이 중지됨으로써 스마트 기능이 구현되지 않는 상태로 전환되고, 이 상태에서 VCC(11)와 MCU(12)는 스마트 기능이 배제된 일반적인 조건으로 모터(13)의 토크를 제어한다.
전술된 바와 같이, 본 실시예에 따른 스마트 전기자동차는 틸트센서(71)와 HDC버튼(72)과 연계되어 험한 비탈길에서 내리막 주행을 부드럽게 하여 안전을 확보해주는 하강주행제어(HDC; Hill Decent Control)가 구현되는 SCU(100,Smart Control Unit)와, VCU(11,Vehicle Control Unit), ABS(20,Anti Brake System) 및 MDPS(30,Motor Driven Power Steering)와 CAN네트워크(200)로 상호 통신하고, HDC구현 시 배터리 전압레벨에 따라 모터(13)의 토크를 단독으로 제어하거나 ABS(20)와 분담하여 제어하는 운용 알고리즘을 구현하는 MCU(12,Motor Control Unit)가 포함됨으로써, 험한 비탈길에서 내리막 주행이 운전자의 브레이크 페달(52)의 조작 없이도 부드럽고 안전하게 구현될 수 있다.
1 : 스마트 전기자동차
10 : 동력유닛 11 : VCU(Vehicle Control Unit)
12 : MCU(Motor Control Unit)
13 : 모터 20 : ABS(Anti Brake System)
30 : MDPS(Motor Driven Power Steering)
40 : 변속레버
50 : 페달유닛 51 : 가속페달
52 : 브레이크페달 60 : HMI(Human Machine Interface)
70 : 노면검출센서
71 : 틸트센서 72 : HDC버튼
100 : SCU(Smart Control Unit)
110 : SC(Smart Controller)
120 : 물체감지센서 121 : 사이드센서
122 : 전후방센서
130 : 모드버튼 131 : SPAS버튼
132 : ASCC버튼 133 : AEBS버튼
200 : CAN네트워크 300 : LIN네트워크
10 : 동력유닛 11 : VCU(Vehicle Control Unit)
12 : MCU(Motor Control Unit)
13 : 모터 20 : ABS(Anti Brake System)
30 : MDPS(Motor Driven Power Steering)
40 : 변속레버
50 : 페달유닛 51 : 가속페달
52 : 브레이크페달 60 : HMI(Human Machine Interface)
70 : 노면검출센서
71 : 틸트센서 72 : HDC버튼
100 : SCU(Smart Control Unit)
110 : SC(Smart Controller)
120 : 물체감지센서 121 : 사이드센서
122 : 전후방센서
130 : 모드버튼 131 : SPAS버튼
132 : ASCC버튼 133 : AEBS버튼
200 : CAN네트워크 300 : LIN네트워크
Claims (8)
- 배터리 전력을 이용해 동력을 발생하는 모터와, 차량을 최상위레벨에서 제어하는 VCU(Vehicle Control Unit)와, 차량 제동을 수행하는 ABS(Anti Brake System)와, 차량 조향을 수행하는 MDPS(Motor Driven Power Steering)와, 차량의 상태를 운전자에게 보여주는 HMI(Human Machine Interface)과 상호 통신하는 CAN네트워크와;
차량의 변속단을 변경하는 변속레버와;
차량 가속을 위한 가속페달과 차량 제동을 위한 브레이크페달과;
상기 CAN네트워크로 상호 통신하고, HDC버튼의 조작신호와 틸트센서의 경사각 검출신호가 처리되는 LIN네트워크를 갖추고, 상기 CAN네트워크를 이용한 상호 통신으로 험한 비탈길에서 내리막 주행을 부드럽게 하여 안전을 확보해주는 하강주행제어(HDC; Hill Decent Control)가 수행되는 SCU(Smart Control Unit)와;
상기 CAN네트워크로 상호 통신하고, 상기 하강주행제어 실행시 상기 배터리 전압레벨에 따라 제어되는 상기 모터의 토크를 단독으로 제어하거나 상기 ABS와 분담하여 제어하는 운용 알고리즘을 갖춘 MCU(Motor Control Unit);
가 포함된 것을 특징으로 하는 스마트 전기자동차.
- 청구항 1에 있어서, 상기 운용 알고리즘은 하강주행제어에 더해 주행시 운전자의 조작 없이도 주행안전을 확보해주는 스마트주행제어모드와, 운전자의 조작 없이도 선행차량과 형성하는 차간거리를 안전하게 확보해주는 비상제동제어모드와, 오르막길에서 정지후 출발할 때 밀림방지로 안전을 확보해주는 등판주행제어모드와, 주차 시 변속레버의 시프트 변속 없이도 편리한 후방 주차기능을 제공해주는 주차조향제어모드와, 후방 주차 시 돌발적인 장애물의 등장에 대해서도 토크제어로 신속하게 대응해주는 주차보조제어모드가
더 포함되는 것을 특징으로 하는 스마트 전기자동차.
- 버튼의 온(On)조작신호를 감지한 SCU(Smart Control Unit)가 험한 비탈길에서 내리막 주행을 부드럽게 하여 안전을 확보해주는 하강주행제어(HDC; Hill Decent Control)를 준비하는 스마트하강주행진입단계;
차량을 최상위레벨에서 제어하는 VCU(Vehicle Control Unit)가 CAN네트워크를 이용해 상기 SCU와 상호 통신하여 상기 하강주행제어의 시작을 인식하고, 틸트센서에서 제공되는 경사각 정보로 도로의 경사각을 판단하는 스마트하강주행준비단계;
상기 경사각이 기준레벨(Reference Level)을 초과하면, 상기 VCU가 모터를 제어하는 MCU(Motor Control Unit)와 상기 CAN네트워크를 이용해 상호 통신하고, 상기 MCU의 연산된 모터속도가 상기 VCU로 제공되고, 상기 VCU는 상기 연산된 모터속도로부터 보상토크를 계산해 상기 MCU로 다시 제공하며, 상기 MCU는 상기 보상토크로 상기 모터의 토크를 제어하는 스마트하강주행제어단계;
배터리의 충전상태가 체크되고, 하강주행을 위한 감속에서 운전자의 조작 없이도 상기 배터리의 충전상태에 따라 회생제동이 구현되는 회생제동제어단계;
상기 SCU에서 상기 버튼의 오프(Off)조작신호를 감지하거나 상기 VCU에서 브레이크페달의 신호가 감지되면, 상기 하강주행제어가 중지되는 스마트하강주행중지단계;
가 포함되어 실행되는 것을 특징으로 하는 스마트 전기자동차의 운용방법.
- 청구항 3에 있어서, 상기 스마트하강주행제어단계에서, 상기 VCU에는 상기 보상토크를 상기 MCU로 다시 제공하도록 PI(Proportion and Integration)타입 속도PI제어기가 포함되고, 상기 MCU에는 상기 모터속도를 상기 VCU로 제공하도록 3상PWM블록과 3상을 2상으로 변환하는 3/2변환기 및 2상을 3상으로 변환하는 2/3변환기와 PI(Proportion and Integration)타입 전류PI제어기가 포함된 것을 특징으로 하는 스마트 전기자동차의 운용방법.
- 청구항 3에 있어서, 상기 회생제동제어단계에서, 상기 배터리의 충전상태가 과 방전이나 과 충전이 아닌 정상 충전 상태일 때 상기 회생제동이 구현되고, 상기 배터리의 충전상태가 과 방전이나 과 충전 상태일 때 상기 회생제동이 구현되지 않는 것을 특징으로 하는 스마트 전기자동차의 운용방법.
- 청구항 5에 있어서, 상기 배터리의 충전상태는 전압레벨로 판단되는 것을 특징으로 하는 스마트 전기자동차의 운용방법.
- 청구항 5에 있어서, 상기 회생제동이 구현되면, 상기 MCU는 상기 보상토크를 참조값(Reference Value)으로 하고, 인버터 제어만으로 상기 모터의 토크를 제어하는 반면;
상기 회생제동이 구현되지 않으면, 상기 MCU의 인버터가 담당하는 인버터토크와 ABS(Anti Brake System)가 담당하는 ABS토크로 분담되고, 토크가 제로(Zero)가 될 때 까지 선형(Linear)적으로 토크 제한치를 낮추도록 제어되는 것을 특징으로 하는 스마트 전기자동차의 운용방법.
- 청구항 3에 있어서, 상기 스마트하강주행중지단계에서, 상기 버튼의 오프(Off)조작신호와 상기 브레이크페달의 신호는 오어(Or)조건인 것을 특징으로 하는 스마트 전기자동차의 운용방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120065492A KR20130142348A (ko) | 2012-06-19 | 2012-06-19 | 스마트 전기자동차 및 이의 운용방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120065492A KR20130142348A (ko) | 2012-06-19 | 2012-06-19 | 스마트 전기자동차 및 이의 운용방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20130142348A true KR20130142348A (ko) | 2013-12-30 |
Family
ID=49985954
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020120065492A KR20130142348A (ko) | 2012-06-19 | 2012-06-19 | 스마트 전기자동차 및 이의 운용방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20130142348A (ko) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111376728A (zh) * | 2018-12-29 | 2020-07-07 | 比亚迪汽车工业有限公司 | 基于陡坡缓降控制系统的控制方法、控制系统及电动车 |
| US10758906B2 (en) | 2016-02-18 | 2020-09-01 | Genobio, Inc. | Cell separation chip and system |
| CN113212184A (zh) * | 2021-06-15 | 2021-08-06 | 奇瑞新能源汽车股份有限公司 | 电动车辆的陡坡缓降控制方法、装置及电动车辆 |
| CN113650504A (zh) * | 2021-07-16 | 2021-11-16 | 一汽奔腾轿车有限公司 | 一种电动车制动能量回收和滑行能量回收协调控制的方法 |
-
2012
- 2012-06-19 KR KR1020120065492A patent/KR20130142348A/ko not_active Application Discontinuation
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10758906B2 (en) | 2016-02-18 | 2020-09-01 | Genobio, Inc. | Cell separation chip and system |
| CN111376728A (zh) * | 2018-12-29 | 2020-07-07 | 比亚迪汽车工业有限公司 | 基于陡坡缓降控制系统的控制方法、控制系统及电动车 |
| CN113212184A (zh) * | 2021-06-15 | 2021-08-06 | 奇瑞新能源汽车股份有限公司 | 电动车辆的陡坡缓降控制方法、装置及电动车辆 |
| CN113650504A (zh) * | 2021-07-16 | 2021-11-16 | 一汽奔腾轿车有限公司 | 一种电动车制动能量回收和滑行能量回收协调控制的方法 |
| CN113650504B (zh) * | 2021-07-16 | 2024-01-19 | 一汽奔腾轿车有限公司 | 一种电动车制动能量回收和滑行能量回收协调控制的方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2749446B1 (en) | Regenerative brake control device | |
| EP2589508B1 (en) | Creeping-cut control apparatus for electrically driven vehicle | |
| US9321370B2 (en) | Control method of electric vehicle | |
| US11180149B2 (en) | Vehicle and method for controlling the same | |
| CN103043056B (zh) | 控制车轮轴扭矩的方法和用于其的控制系统 | |
| EP2589509B1 (en) | Creep cut-off control device for electric vehicle | |
| US20220080942A1 (en) | Control Unit for Providing a One-Pedal Feel and/or a Creep Function | |
| CN108515971A (zh) | 一种巡航功能控制方法、系统、装置及可读存储介质 | |
| KR101935055B1 (ko) | 스마트 전기자동차 및 이의 운용방법 | |
| CN111605407B (zh) | 电动车辆的控制装置 | |
| KR20130142348A (ko) | 스마트 전기자동차 및 이의 운용방법 | |
| KR20140004439A (ko) | 스마트 전기자동차 및 이의 운용방법 | |
| KR101977416B1 (ko) | 스마트 전기자동차 및 이의 운용방법 | |
| KR20130142347A (ko) | 스마트 전기자동차 및 이의 운용방법 | |
| JP2013215063A (ja) | 電気自動車のクリープ制御装置 | |
| KR101977414B1 (ko) | 스마트 전기자동차 및 이의 운용방법 | |
| KR101977415B1 (ko) | 스마트 전기자동차 및 이의 운용방법 | |
| KR102302278B1 (ko) | 스마트 전기자동차 및 그 동작 방법 | |
| JPH10304508A (ja) | 電気自動車のモータ制御装置 | |
| JP2006151020A (ja) | 加減速度制御装置 | |
| JP2007056933A (ja) | 車両の左右トルク配分制御装置 | |
| JP5598103B2 (ja) | 電動車両のモータロック対策制御装置 | |
| JP2013135483A (ja) | 車両の制動力制御装置 | |
| JP2006006078A (ja) | 電気自動車の制御装置 | |
| CN117662750A (zh) | 一种车辆调速控制方法、装置、存储介质和车辆 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WITN | Withdrawal due to no request for examination |