KR20120077458A - 소형 제어회로 설계 및 방수기법이 적용된 물고기형 수중 로봇 - Google Patents
소형 제어회로 설계 및 방수기법이 적용된 물고기형 수중 로봇 Download PDFInfo
- Publication number
- KR20120077458A KR20120077458A KR1020100139413A KR20100139413A KR20120077458A KR 20120077458 A KR20120077458 A KR 20120077458A KR 1020100139413 A KR1020100139413 A KR 1020100139413A KR 20100139413 A KR20100139413 A KR 20100139413A KR 20120077458 A KR20120077458 A KR 20120077458A
- Authority
- KR
- South Korea
- Prior art keywords
- fish
- plate
- frames
- underwater robot
- case
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 241000251468 Actinopterygii Species 0.000 claims abstract description 26
- 238000004078 waterproofing Methods 0.000 claims abstract description 21
- 238000000034 method Methods 0.000 claims abstract description 19
- 239000004593 Epoxy Substances 0.000 claims abstract description 6
- 239000007788 liquid Substances 0.000 claims abstract description 3
- 238000002347 injection Methods 0.000 claims description 10
- 239000007924 injection Substances 0.000 claims description 10
- 239000000126 substance Substances 0.000 claims description 6
- 229920001296 polysiloxane Polymers 0.000 claims description 3
- 230000007797 corrosion Effects 0.000 abstract description 5
- 238000005260 corrosion Methods 0.000 abstract description 5
- 229910052710 silicon Inorganic materials 0.000 abstract description 3
- 239000010703 silicon Substances 0.000 abstract description 3
- 230000008878 coupling Effects 0.000 abstract 1
- 238000010168 coupling process Methods 0.000 abstract 1
- 238000005859 coupling reaction Methods 0.000 abstract 1
- 238000013461 design Methods 0.000 description 11
- 230000007257 malfunction Effects 0.000 description 5
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 4
- 238000010586 diagram Methods 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 241001522296 Erithacus rubecula Species 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 239000002480 mineral oil Substances 0.000 description 1
- 235000010446 mineral oil Nutrition 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 239000003921 oil Substances 0.000 description 1
- 239000002699 waste material Substances 0.000 description 1
Images
Classifications
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63H—TOYS, e.g. TOPS, DOLLS, HOOPS OR BUILDING BLOCKS
- A63H23/00—Toy boats; Floating toys; Other aquatic toy devices
- A63H23/10—Other water toys, floating toys, or like buoyant toys
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63H—TOYS, e.g. TOPS, DOLLS, HOOPS OR BUILDING BLOCKS
- A63H23/00—Toy boats; Floating toys; Other aquatic toy devices
- A63H23/10—Other water toys, floating toys, or like buoyant toys
- A63H23/14—Special drives
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/005—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators using batteries, e.g. as a back-up power source
Landscapes
- Engineering & Computer Science (AREA)
- Manipulator (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
Abstract
Description
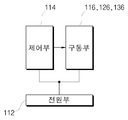
도 2는 도 1에 도시된 물고기 수중 로봇의 내부 구성을 개략적으로 보여주는 블록도이다.
Claims (6)
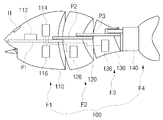
- 복수의 기어를 통해 물리적으로 연결된 복수의 프레임으로 이루어진 물고기형 수중 로봇에 있어서,
상기 복수의 프레임 중 어느 한 프레임에 구비되는 제어부; 및
상기 복수의 프레임에 각각 구비되고, 상기 제어부와 방수 케이블로 각각 연결된 복수의 구동 모터를 포함하는 구동부
를 포함하는 물고기형 수중 로봇.
- 제1항에 있어서, 상기 복수의 구동 모터는 제1 내지 제3 구동 모터를 포함하고, 상기 방수 케이블은 제1 내지 제3 방수 케이블을 포함하고,
상기 복수의 프레임은,
상기 제어부와 상기 제1 구동모터가 배치된 제1 플레이트와, 상기 제1 플레이트와 결합되어 상기 제어부를 커버하는 제1 케이스를 포함하는 제1 프레임;
상기 제1 플레이트와 제1 기어를 통해 연결되는 제2 플레이트와, 상기 제2 플레이트상에 배치되어 상기 제어부와 제2 방수 케이블로 연결되는 상기 제2 구동모터를 커버하는 제2 케이스를 포함하는 제2 프레임; 및
상기 제2 플레이트와 제2 기어를 통해 연결되는 제3 플레이트와, 상기 제3 플레이트 상에 배치되어 상기 제어부와 제3 방수 케이블로 연결되는 상기 제3 구동 모터를 커버하는 제3 케이스를 포함하는 제3 프레임을 포함하는 것을 특징으로 하는 물고기형 수중 로봇.
- 제2항에 있어서, 상기 제1 프레임은,
상기 제1 플레이트 상에 배치된 충전 가능한 배터리가 더 구비되고,
상기 제1 케이스는,
측면에 전원 주입구가 형성되어, 상기 전원 주입구를 통해 외부로부터 상기 배터리에 전원을 충전시키고, 충전완료된 경우, 약품처리 없이 O-ring 타입으로 상기 전원 주입구를 방수 처리하는 것을 특징으로 하는 물고기형 수중 로봇
- 제3항에 있어서, 상기 제1 케이스는,
물고기의 머리 형상인 것을 특징으로 하는 물고기형 수중 로봇.
- 제3항에 있어서, 상기 배터리는,
유선 충전 방식에 따라 외부로부터 전력을 공급받아 충전되는 것을 특징으로 하는 물고기형 수중 로봇.
- 제2항에 있어서, 상기 제1 내지 제3 케이스와 상기 제1 내지 제3 플레이트는 결합부위에 액체 실리콘을 이용하여 1차 방수 처리하고, 에폭시를 이용하여 2차 방수 처리하는 것을 특징으로 하는 물고기형 수중 로봇.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020100139413A KR101236479B1 (ko) | 2010-12-30 | 2010-12-30 | 소형 제어회로 설계 및 방수기법이 적용된 물고기형 수중 로봇 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020100139413A KR101236479B1 (ko) | 2010-12-30 | 2010-12-30 | 소형 제어회로 설계 및 방수기법이 적용된 물고기형 수중 로봇 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20120077458A true KR20120077458A (ko) | 2012-07-10 |
| KR101236479B1 KR101236479B1 (ko) | 2013-02-22 |
Family
ID=46710940
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020100139413A Active KR101236479B1 (ko) | 2010-12-30 | 2010-12-30 | 소형 제어회로 설계 및 방수기법이 적용된 물고기형 수중 로봇 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101236479B1 (ko) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016200092A1 (ko) * | 2015-06-09 | 2016-12-15 | (주)아이로 | 물고기 로봇 |
| US9937986B1 (en) | 2016-11-10 | 2018-04-10 | AIRO Inc. | Multi-joint fish robot capable of rapid acceleration propulsion |
| CN108279676A (zh) * | 2015-06-19 | 2018-07-13 | 缪雪峰 | 微型无缆游动机器人及其控制方法 |
| KR20190023830A (ko) | 2017-08-30 | 2019-03-08 | 황요섭 | 무볼팅 방수구조가 적용된 수중 로봇 |
| KR102087716B1 (ko) * | 2018-11-01 | 2020-03-11 | (주)아이로 | 로봇물고기 |
| CN112870737A (zh) * | 2021-03-16 | 2021-06-01 | 上海海洋大学 | 一种观赏性水下仿生金龙鱼 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002136776A (ja) * | 2000-11-02 | 2002-05-14 | Mitsubishi Heavy Ind Ltd | 魚ロボット及び水中通信装置 |
| JP4255477B2 (ja) | 2006-02-07 | 2009-04-15 | Mhiソリューションテクノロジーズ株式会社 | 魚状ロボット |
| KR100802354B1 (ko) * | 2006-11-23 | 2008-02-13 | 건국대학교 산학협력단 | 압전세라믹 작동기로 구동되는 물고기 로봇 |
-
2010
- 2010-12-30 KR KR1020100139413A patent/KR101236479B1/ko active Active
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016200092A1 (ko) * | 2015-06-09 | 2016-12-15 | (주)아이로 | 물고기 로봇 |
| CN108279676A (zh) * | 2015-06-19 | 2018-07-13 | 缪雪峰 | 微型无缆游动机器人及其控制方法 |
| US9937986B1 (en) | 2016-11-10 | 2018-04-10 | AIRO Inc. | Multi-joint fish robot capable of rapid acceleration propulsion |
| KR20190023830A (ko) | 2017-08-30 | 2019-03-08 | 황요섭 | 무볼팅 방수구조가 적용된 수중 로봇 |
| KR102087716B1 (ko) * | 2018-11-01 | 2020-03-11 | (주)아이로 | 로봇물고기 |
| CN112870737A (zh) * | 2021-03-16 | 2021-06-01 | 上海海洋大学 | 一种观赏性水下仿生金龙鱼 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101236479B1 (ko) | 2013-02-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101236479B1 (ko) | 소형 제어회로 설계 및 방수기법이 적용된 물고기형 수중 로봇 | |
| CN109421505B (zh) | 用于为机动车辆储存电能的装置 | |
| CN103081046B (zh) | 蓄电装置及具备其的工程机械 | |
| US20120208048A1 (en) | Batteries for power tools and methods of mounting battery terminals to battery housings | |
| JP2012085504A (ja) | 低電圧及び高電圧統合電圧分配装置 | |
| CN110419118B (zh) | 用于机动车的动力电池的模块化系统 | |
| ATE427576T1 (de) | Vorrichtung und verfahren fur das aufladen einer batterie uber kapazitiver kopplung | |
| CN108349404B (zh) | 用于机动车的高压电池和机动车 | |
| FR3060231B1 (fr) | Appareil d'alimentation d'energie pour vehicules electriques | |
| CN107380381A (zh) | 一种可漂浮的潜水系统 | |
| WO2020067395A1 (ja) | 雄型接続子、それを備える収容装置 | |
| JP2018144524A (ja) | 電動車両のバッテリパック | |
| BG1635U1 (bg) | Пластмасова капачка за капсулован акумулатор | |
| CN101725261B (zh) | 无缆遥控自容式电源泳池自动清洁机 | |
| JP2017050093A (ja) | 電池パック | |
| CN107499478B (zh) | 一种作业型水下机器人电子舱 | |
| CN2924010Y (zh) | 用于采矿机械的驱动装置 | |
| CN202069834U (zh) | 磁力接触充电震动按摩器及其充电器 | |
| JP2023136163A (ja) | リレー駆動制御装置、制御方法、及び制御プログラム | |
| WO2005073077A3 (de) | Energieversorgungseinrichtung für ein u-boot | |
| KR20160070599A (ko) | 음향신호 추적형 다종 물고기로봇의 군집유영장치 및 방법 | |
| CN106160355B (zh) | 带有集成控制器的纯电动车电机 | |
| CN106716772A (zh) | 蓄电装置 | |
| CN106558798A (zh) | 用于电池箱的连接器总成、电池箱及电池装置 | |
| CN119029611A (zh) | 一种可主从分离的水下潜航器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20101230 |
|
| PA0201 | Request for examination | ||
| PG1501 | Laying open of application | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20120816 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20130206 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20130218 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20130218 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20151215 Start annual number: 4 End annual number: 4 |
|
| FPAY | Annual fee payment |
Payment date: 20170120 Year of fee payment: 5 |
|
| PR1001 | Payment of annual fee |
Payment date: 20170120 Start annual number: 5 End annual number: 5 |
|
| FPAY | Annual fee payment |
Payment date: 20180102 Year of fee payment: 6 |
|
| PR1001 | Payment of annual fee |
Payment date: 20180102 Start annual number: 6 End annual number: 6 |
|
| FPAY | Annual fee payment |
Payment date: 20190102 Year of fee payment: 7 |
|
| PR1001 | Payment of annual fee |
Payment date: 20190102 Start annual number: 7 End annual number: 7 |
|
| FPAY | Annual fee payment |
Payment date: 20191223 Year of fee payment: 8 |
|
| PR1001 | Payment of annual fee |
Payment date: 20191223 Start annual number: 8 End annual number: 8 |
|
| PR1001 | Payment of annual fee |
Payment date: 20201228 Start annual number: 9 End annual number: 9 |
|
| PR1001 | Payment of annual fee |
Payment date: 20220103 Start annual number: 10 End annual number: 10 |
|
| PR1001 | Payment of annual fee |
Payment date: 20230102 Start annual number: 11 End annual number: 11 |
|
| PR1001 | Payment of annual fee |
Payment date: 20241223 Start annual number: 13 End annual number: 13 |