JP7621688B2 - 制御システム - Google Patents
制御システム Download PDFInfo
- Publication number
- JP7621688B2 JP7621688B2 JP2023556224A JP2023556224A JP7621688B2 JP 7621688 B2 JP7621688 B2 JP 7621688B2 JP 2023556224 A JP2023556224 A JP 2023556224A JP 2023556224 A JP2023556224 A JP 2023556224A JP 7621688 B2 JP7621688 B2 JP 7621688B2
- Authority
- JP
- Japan
- Prior art keywords
- teeth
- fluid pressure
- motor
- load
- control system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B02—CRUSHING, PULVERISING, OR DISINTEGRATING; PREPARATORY TREATMENT OF GRAIN FOR MILLING
- B02C—CRUSHING, PULVERISING, OR DISINTEGRATING IN GENERAL; MILLING GRAIN
- B02C1/00—Crushing or disintegrating by reciprocating members
- B02C1/02—Jaw crushers or pulverisers
- B02C1/025—Jaw clearance or overload control
-
- H02J7/90—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B02—CRUSHING, PULVERISING, OR DISINTEGRATING; PREPARATORY TREATMENT OF GRAIN FOR MILLING
- B02C—CRUSHING, PULVERISING, OR DISINTEGRATING IN GENERAL; MILLING GRAIN
- B02C1/00—Crushing or disintegrating by reciprocating members
- B02C1/02—Jaw crushers or pulverisers
- B02C1/04—Jaw crushers or pulverisers with single-acting jaws
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B02—CRUSHING, PULVERISING, OR DISINTEGRATING; PREPARATORY TREATMENT OF GRAIN FOR MILLING
- B02C—CRUSHING, PULVERISING, OR DISINTEGRATING IN GENERAL; MILLING GRAIN
- B02C25/00—Control arrangements specially adapted for crushing or disintegrating
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J1/00—Circuit arrangements for DC mains or DC distribution networks
- H02J1/10—Parallel operation of DC sources
- H02J1/106—Parallel operation of DC sources for load balancing, symmetrisation, or sharing
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/34—Parallel operation in networks using both storage and other DC sources, e.g. providing buffering
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using DC to AC converters or inverters with pulse width modulation
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/40—Dippers; Buckets ; Grab devices, e.g. manufacturing processes for buckets, form, geometry or material of buckets
- E02F3/407—Dippers; Buckets ; Grab devices, e.g. manufacturing processes for buckets, form, geometry or material of buckets with ejecting or other unloading device
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/96—Dredgers; Soil-shifting machines mechanically-driven with arrangements for alternate or simultaneous use of different digging elements
- E02F3/965—Dredgers; Soil-shifting machines mechanically-driven with arrangements for alternate or simultaneous use of different digging elements of metal-cutting or concrete-crushing implements
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2058—Electric or electro-mechanical or mechanical control devices of vehicle sub-units
- E02F9/2091—Control of energy storage means for electrical energy, e.g. battery or capacitors
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2058—Electric or electro-mechanical or mechanical control devices of vehicle sub-units
- E02F9/2095—Control of electric, electro-mechanical or mechanical equipment not otherwise provided for, e.g. ventilators, electro-driven fans
-
- H02J2105/40—
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/02—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the kind of motor
- H02P25/022—Synchronous motors
- H02P25/024—Synchronous motors controlled by supply frequency
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Food Science & Technology (AREA)
- Mechanical Engineering (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
- Secondary Cells (AREA)
- Direct Current Feeding And Distribution (AREA)
Description
本実施形態に係る制御システムについて、図1ないし図4を用いて説明する。本実施形態に係る制御システムは、建設機器の電源を制御するものであり、特にハイブリット型のクラッシャを含む建設機器の電源制御に関するものである。ハイブリッド型のクラッシャは、発電機や商用電源などの外部電源からの供給電力と、二次電池などのバッテリ電源からの供給電力を駆動エネルギーとするものであり、駆動部の負荷が大きい場合などに外部電源からの電力供給に加えてバッテリ電源からの電力供給で補給を行うものである。逆に駆動部の負荷が小さく外部電源に余裕がある場合には、余剰電力をバッテリ電源に蓄電しておくことでエネルギーを有効活用する。
本実施形態に係る制御システムについて、図5ないし図8を用いて説明する。本実施形態に係る制御システムは、前記第1の実施形態の場合と同様に、ハイブリット型のクラッシャによる破砕作業等を行う場合の駆動制御システムについて説明するが、ここでは、建設機器の駆動部をIPMモータで高性能に動作させつつ、当該IPMモータを制御するためのインバータを保護する制御システムについて説明する。なお、本実施形態において前記第1の実施形態と重複する説明は省略する。
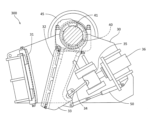
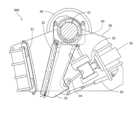
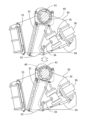
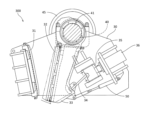
本実施形態に係る制御システムについて、図9ないし図17を用いて説明する。本実施形態においては、建設機器としてジョークラッシャを用いた場合の制御について説明する。なお、本実施形態において前記各実施形態と重複する説明は省略する。
11 駆動部
11a IPMモータ
12 インバータ
13 コンバータ
14 リチウムイオンバッテリ
15 PLC
15a 油圧制御部
16 直流母線
17 BMS
18 計測部
19 交流電源
20 高調波フィルタモジュール
21 容量入力情報
22 情報取得部
23 駆動制御部
24 バッテリ制御部
25 演算部
30 本体フレーム
31 不動歯
32 動歯
33 スイングジョー
34 トッグルプレート
35 トッグルブロック
36 流体圧シリンダ
37 電動機
38 流体圧モータ
39 制御部
39a 流体圧制御手段
39b 電動機制御手段
39c 流体圧制御機構部
40 回転軸
41 偏心軸部
45 フライホイール
50 テンションロッド
150 動作制御部
300 破砕装置
Claims (13)
- 建設機器を駆動する駆動部と、
当該駆動部に接続され、当該駆動部に供給される電力の変換を行うインバータと、
前記駆動部を駆動するための電力を交流電源から受け取って直流電力に変換するコンバータと、
前記駆動部の駆動状態に応じて前記コンバータで変換された直流電力を充電し、又は前記駆動部の駆動状態に応じて当該駆動部に電力供給する二次電池と、
前記二次電池の状態及び前記交流電源の出力容量に基づいて、前記コンバータの変換電圧を設定するPLCとを備え、
前記二次電池がリチウムイオン電池であり、前記PLCは、前記リチウムイオン電池が電圧変動しにくい範囲の電圧値に前記コンバータの変換電圧を設定することを特徴とする制御システム。 - 建設機器を駆動する駆動部と、
当該駆動部に接続され、当該駆動部に供給される電力の変換を行うインバータと、
前記駆動部を駆動するための電力を交流電源から受け取って直流電力に変換するコンバータと、
前記駆動部の駆動状態に応じて前記コンバータで変換された直流電力を充電し、又は前記駆動部の駆動状態に応じて当該駆動部に電力供給する二次電池と、
前記二次電池の状態及び前記交流電源の出力容量に基づいて、前記コンバータの変換電圧を設定するPLCとを備え、
前記PLCは、前記交流電源の出力容量に基づいて、前記コンバータの変換電圧の上限値を演算して設定することを特徴とする制御システム。 - 請求項2に記載の制御システムにおいて、
前記駆動部の消費電力が前記コンバータの変換電圧の上限値を超える場合に、前記二次電池から前記駆動部に電力が供給される制御システム。 - 請求項1又は2に記載の制御システムにおいて、
前記PLCが、前記駆動部が無負荷状態である場合に前記二次電池のモジュール間のバランス制御を行う制御システム。 - 請求項1又は2に記載の制御システムにおいて、
前記建設機器への急激な負荷変動に応じて当該建設機器の駆動部を駆動させるIPMモータを備え、
前記二次電池は、前記インバータに直流母線で接続し、前記駆動部に電力を供給するための給電領域と前記駆動部からの急激な負荷変動による回生エネルギーを吸収して前記インバータを保護する保護充電領域とを有することを特徴とする制御システム。 - 請求項5に記載の制御システムにおいて、
前記二次電池の前記給電領域と前記保護充電領域とを前記直流母線の電圧値で調整する電圧調整手段を備える制御システム。 - 請求項5に記載の制御システムにおいて、
前記インバータが前記IPMモータを制御するための周波数及び/又は電圧値の設定が上限値に調整されている制御システム。 - 請求項5に記載の制御システムにおいて、
前記IPMモータが駆動する駆動部がクラッシャーのフライホイールであり、当該フライホイールの動作に合わせて駆動する破砕歯に掛かる負荷変動の回生エネルギーが前記二次電池に吸収される制御システム。 - 請求項1又は2に記載の制御システムにおいて、
前記建設機器が、本体フレームに固定される不動歯と、当該不動歯に対向して配置される動歯と、当該動歯を取り付けられて少なくとも揺動可能に本体フレームに配設されるスイングジョーとを備え、不動歯に対して動歯をスイングジョーと共に動かして、不動歯と動歯との間に入れた破砕対象物を破砕する、ジョークラッシャである破砕装置を含み、
当該破砕装置が、
前記スイングジョーの本体フレームに対する可動範囲の位置決めを行って、前記不動歯と動歯の間隔を調整可能とする調整部と、
破砕時における動歯に対する負荷の変動に対応して、少なくとも前記調整部を制御する制御部とを備え、
破砕可能な破砕対象物又は破砕不能な異物によって、動歯に対し負荷が増大すると、前記制御部が、少なくとも前記調整部で不動歯と動歯との間隔を広げるようにし、負荷の増大の原因となった破砕対象物の破砕後、又は、異物の不動歯と動歯間からの排出後、調整部を元の状態に復帰させることを特徴とする制御システム。 - 前記請求項9に記載の制御システムにおいて、
前記スイングジョー及び動歯を動かす電動機と、
当該電動機と別途にスイングジョーを動かせる流体圧モータとを備え、
前記制御部が、破砕不能な異物によって、動歯に対し負荷が増大すると、前記調整部で不動歯と動歯との間隔を広げるより前に、電動機による駆動を停止させると共に、流体圧モータを正逆回転駆動させて前記スイングジョーを動かし、不動歯と動歯との間隔を繰り返し変化させ、負荷上昇の原因となった異物が不動歯と動歯との間から排出されやすくすることを特徴とする制御システム。 - 前記請求項9に記載の制御システムにおいて、
前記調整部が、前記スイングジョーに対し前記不動歯のある側とは反対側となる所定箇所に配設される流体圧シリンダとされ、当該流体圧シリンダの一端と他端との間隔を変えて前記スイングジョーを位置決めし、前記不動歯と動歯の間隔を調整可能とされ、
前記制御部が、動歯に対し負荷が増大すると、前記調整部としての流体圧シリンダの一端と他端との間隔を縮小させて前記スイングジョーを動かし、不動歯と動歯との間隔を広げるようにし、負荷の増大の原因となった破砕対象物の破砕後、又は、異物の不動歯と動歯間からの排出後、流体圧シリンダを元の状態に復帰させることを特徴とする制御システム。 - 前記請求項11に記載の制御システムにおいて、
前記制御部が、
動歯に対し負荷が増大して、スイングジョーを通じて前記流体圧シリンダの一端と他端との間隔を縮小しようとする力が強まり、流体圧シリンダに通じる流体圧回路の流体圧が高くなると、流体圧シリンダの一端と他端との間隔の一時的な縮小を伴いつつ流体を制御して、動歯に対する負荷を抑制可能とする流体圧制御手段と、
前記電動機に流れる電流を検出し、検出した電流値が、不動歯と動歯との間に破砕不能な異物が入って動歯に対し過負荷となる状況に対応した、あらかじめ設定された所定の条件を満たす場合には、電動機の駆動を停止させる一方、検出した電流値が前記条件を満たさない場合には、電動機の駆動を継続させる電動機制御手段とを備え、
前記流体圧制御手段が、破砕可能な破砕対象物によって動歯に対し過渡的に負荷が増大すると、前記電動機制御手段で検出される電動機の電流値が前記条件を満たす状態に到らない程度に、流体圧シリンダに通じる流体圧回路の流体を制御して流体圧シリンダの一端と他端との間隔を一時的に縮小させることを特徴とする制御システム。 - 前記請求項9に記載の制御システムにおいて、
前記制御部の電動機制御手段が、動歯に対する負荷の上昇が生じた状態における電動機に流れる電流値であって、過負荷の状況に対応した前記条件を満たす場合の電流値より小さい所定の電流値を、第二の閾値としてあらかじめ設定し、
前記電動機制御手段が、電動機に流れる電流を検出し、検出した電流値が前記条件を満たさない場合で、且つ前記第二の閾値を超える場合には、電動機の駆動を継続させつつ、破砕装置に破砕対象物を供給するフィーダを停止させることを特徴とする制御システム。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021175560 | 2021-10-27 | ||
| JP2021175560 | 2021-10-27 | ||
| JP2022031212 | 2022-03-01 | ||
| JP2022031212 | 2022-03-01 | ||
| PCT/JP2022/036191 WO2023074238A1 (ja) | 2021-10-27 | 2022-09-28 | 制御システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2023074238A1 JPWO2023074238A1 (ja) | 2023-05-04 |
| JP7621688B2 true JP7621688B2 (ja) | 2025-01-27 |
Family
ID=86159803
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023556224A Active JP7621688B2 (ja) | 2021-10-27 | 2022-09-28 | 制御システム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20240226905A1 (ja) |
| EP (1) | EP4425735A4 (ja) |
| JP (1) | JP7621688B2 (ja) |
| CA (1) | CA3223176A1 (ja) |
| MX (1) | MX2023015171A (ja) |
| WO (1) | WO2023074238A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2025176933A1 (en) * | 2024-02-22 | 2025-08-28 | Metso Finland Oy | Method of operating a mineral material processing plant with braking energy recovery |
| CN118218104A (zh) * | 2024-05-20 | 2024-06-21 | 哈尔滨和泰电力设备有限公司 | 一种清箅破碎机及控制方法 |
| CN118925907A (zh) * | 2024-09-23 | 2024-11-12 | 包头市昶泰矿业有限责任公司 | 基于plc控制的破碎机自动给料系统 |
| CN120539820B (zh) * | 2025-06-16 | 2026-02-13 | 山东山矿机械有限公司 | 一种液压鄂式破碎机过铁量检测方法及系统 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002330554A (ja) | 2001-04-27 | 2002-11-15 | Kobelco Contstruction Machinery Ltd | ハイブリッド車両の電力制御装置および当該電力制御装置を備えたハイブリッド建設機械 |
| JP2009011021A (ja) | 2007-06-26 | 2009-01-15 | Sumitomo Heavy Industries Engineering-Service Co Ltd | ハイブリット電源装置 |
| JP2009284717A (ja) | 2008-05-26 | 2009-12-03 | Mazda Motor Corp | 自動車のバッテリ制御方法及びその装置 |
| WO2011034130A1 (ja) | 2009-09-16 | 2011-03-24 | 三菱重工業株式会社 | 電力供給制御システム |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4093517B2 (ja) | 1999-09-02 | 2008-06-04 | 株式会社小松製作所 | 破砕装置の歯先隙間調整装置及びその調整方法 |
| JP7217019B2 (ja) | 2019-12-03 | 2023-02-02 | 株式会社中山ホールディングス | 破砕機駆動装置 |
| JP2021090261A (ja) | 2019-12-03 | 2021-06-10 | 株式会社中山鉄工所 | 破砕機駆動装置 |
-
2022
- 2022-09-28 CA CA3223176A patent/CA3223176A1/en active Pending
- 2022-09-28 JP JP2023556224A patent/JP7621688B2/ja active Active
- 2022-09-28 EP EP22886570.5A patent/EP4425735A4/en active Pending
- 2022-09-28 US US18/572,177 patent/US20240226905A1/en active Pending
- 2022-09-28 MX MX2023015171A patent/MX2023015171A/es unknown
- 2022-09-28 WO PCT/JP2022/036191 patent/WO2023074238A1/ja not_active Ceased
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002330554A (ja) | 2001-04-27 | 2002-11-15 | Kobelco Contstruction Machinery Ltd | ハイブリッド車両の電力制御装置および当該電力制御装置を備えたハイブリッド建設機械 |
| JP2009011021A (ja) | 2007-06-26 | 2009-01-15 | Sumitomo Heavy Industries Engineering-Service Co Ltd | ハイブリット電源装置 |
| JP2009284717A (ja) | 2008-05-26 | 2009-12-03 | Mazda Motor Corp | 自動車のバッテリ制御方法及びその装置 |
| WO2011034130A1 (ja) | 2009-09-16 | 2011-03-24 | 三菱重工業株式会社 | 電力供給制御システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2023074238A1 (ja) | 2023-05-04 |
| US20240226905A1 (en) | 2024-07-11 |
| EP4425735A4 (en) | 2025-09-24 |
| EP4425735A1 (en) | 2024-09-04 |
| CA3223176A1 (en) | 2023-05-04 |
| MX2023015171A (es) | 2024-01-23 |
| WO2023074238A1 (ja) | 2023-05-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7621688B2 (ja) | 制御システム | |
| JP5186586B2 (ja) | 駆動制御装置、電気機器及び駆動制御方法 | |
| EP2672023B1 (en) | Slewing-type working machine | |
| CN101745457A (zh) | 用于轮齿式破碎机的模糊控制系统及控制方法 | |
| JP2000319932A (ja) | ショベル | |
| CN109414700B (zh) | 串联混合驱动的移动式废物粉碎设备 | |
| JP2014121662A (ja) | 破砕システムおよびその運転方法 | |
| EP2677147B1 (en) | Power source apparatus and hybrid construction machine equipped with same | |
| JP4947926B2 (ja) | 電力貯蔵手段を具備した自家発電設備の運転方法及び自家発電設備 | |
| JP7217019B2 (ja) | 破砕機駆動装置 | |
| KR20140087932A (ko) | 배터리 에너지 저장 시스템 및 그의 제어 방법 | |
| CN115382653A (zh) | 废钢喂料机的喂料控制方法 | |
| CN201079745Y (zh) | 有弧篦格板的锤式破碎机 | |
| CN211051689U (zh) | 一种破碎机 | |
| CN113097974A (zh) | 粉碎机 | |
| JP5552403B2 (ja) | 負荷状態に合わせた電気機器の回転数制御を用いた電動機駆動トルク制御装置及び電動機駆動トルク制御方法 | |
| JP2012110846A (ja) | 二軸型破砕機及び二軸型破砕機の制御方法 | |
| JP2023131703A (ja) | 砕石生成システム | |
| US20260008422A1 (en) | Electrical Powertrain System for Mobile Crushers | |
| CN215917672U (zh) | 一种大处理量rdf单轴机 | |
| CN208407107U (zh) | 颚式液压破碎斗 | |
| CN221909036U (zh) | 一种预碎机 | |
| CN105911914A (zh) | 一种粉磨站中给料机和上料皮带的控制方法及控制系统 | |
| KR102277233B1 (ko) | 드라이 진공 펌프의 정전대응 배터리 장치 | |
| CN202893478U (zh) | 破碎机进出料自动控制装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20231207 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241015 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241128 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241210 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250107 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7621688 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |