JP7470878B2 - 車両、操舵制御のためのシステム、方法、プログラム、プログラムを記録した記録媒体、自動走行システム - Google Patents
車両、操舵制御のためのシステム、方法、プログラム、プログラムを記録した記録媒体、自動走行システム Download PDFInfo
- Publication number
- JP7470878B2 JP7470878B2 JP2023555994A JP2023555994A JP7470878B2 JP 7470878 B2 JP7470878 B2 JP 7470878B2 JP 2023555994 A JP2023555994 A JP 2023555994A JP 2023555994 A JP2023555994 A JP 2023555994A JP 7470878 B2 JP7470878 B2 JP 7470878B2
- Authority
- JP
- Japan
- Prior art keywords
- detection sensor
- vehicle
- electromagnetic induction
- induction line
- center
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 22
- 238000001514 detection method Methods 0.000 claims description 258
- 230000005674 electromagnetic induction Effects 0.000 claims description 160
- 230000006698 induction Effects 0.000 claims description 111
- 238000004590 computer program Methods 0.000 claims description 11
- 230000001360 synchronised effect Effects 0.000 claims description 6
- 238000010586 diagram Methods 0.000 description 24
- 238000004891 communication Methods 0.000 description 17
- 244000025254 Cannabis sativa Species 0.000 description 7
- 238000013459 approach Methods 0.000 description 7
- 238000012937 correction Methods 0.000 description 7
- 230000006870 function Effects 0.000 description 7
- 239000013256 coordination polymer Substances 0.000 description 6
- 102100039216 Dolichyl-diphosphooligosaccharide-protein glycosyltransferase subunit 2 Human genes 0.000 description 5
- 101100479019 Encephalitozoon intestinalis SWP2 gene Proteins 0.000 description 5
- 101000670093 Homo sapiens Dolichyl-diphosphooligosaccharide-protein glycosyltransferase subunit 2 Proteins 0.000 description 5
- 101100519877 Schizosaccharomyces pombe (strain 972 / ATCC 24843) phf2 gene Proteins 0.000 description 5
- 230000006399 behavior Effects 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 230000007423 decrease Effects 0.000 description 2
- 230000005684 electric field Effects 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 239000002689 soil Substances 0.000 description 2
- 241001124569 Lycaenidae Species 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 239000003337 fertilizer Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000010363 phase shift Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
Images













Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Guiding Agricultural Machines (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
図1は、本発明の1つの実施形態に係る、芝刈り機の自動走行に必要となる装置類の全体概要図である。本実施形態では、RTK-GPS方式(Real Time Kinematic GPS:干渉測位方式)を用いて、現在位置の計測を行いながらゴルフ場の芝刈り作業を行う芝刈り機1の例を示す。
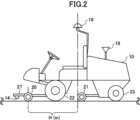
図2は芝刈り機1を側面から見た外観図である。図3は、本発明の1つの実施形態に係る芝刈り機の主要部の上面概念図である。上述した制御装置11、車速センサ12、方位角速度センサ13、駆動制御部17、及び走行駆動機構及び作業駆動機構は、芝刈り機1の機体10に内蔵されている。
図1に戻り、制御装置11のGPS受信部101は、GPSアンテナ18で受信したGPSデータを制御情報生成部107へ出力する。送受信部102は、通信アンテナ19を介して、制御情報生成部107と基地局3との間の通信を可能にし、通信アンテナ19で受信した芝刈り機1の位置情報の誤差を補正するための補正情報を制御情報生成部107に出力する。制御情報生成部107は、GPSアンテナ18で受信したGPSデータと通信アンテナ19で受信した芝刈り機1の位置情報の誤差を補正するための補正情報に基づいて、芝刈り機1の現在位置を表す位置情報を生成する。また、送受信部102は、有線若しくは無線、又はLAN(Local Area Network)若しくは公衆通信回線を問わず任意のネットワークに接続されることができる。
次に、本発明の一実施形態に係る操舵制御システム及び方法について説明する。まず、その原理について説明する。図4は、電磁誘導線からの誘導線検出センサのずれと電磁誘導線と誘導線検出センサの位置関係の関係を示す図である。図5は、電磁誘導線上を自動走行する際の幾何学的関係を示す図である。図6から図9は、ピボットの軌跡と中央誘導線検出センサの軌跡の関係を示す図である。図10は、本発明の1つの実施形態に係る操舵制御処理の例のフローチャートである。
まず、中央誘導線検出センサ15が、ピボットPv上にある場合を考えてみる。
まず、ピボットPvから最も近い配置について検討する。図7を参照して、l=tv[m]、すなわち、中央誘導線検出センサ15が、芝刈り機1の中央線C上でピボットPvから距離tv[m]だけ離れて配置されている場合を考える。ピボットPvの初期位置をP2、中央誘導線検出センサ15の初期位置をP3とする。初期位置において、中央誘導線検出センサ15は、電磁誘導線E上の位置にあり、中央誘導線検出センサ15はずれを検出しないので、操舵制御システム60は操舵を行わず、芝刈り機1は直進する。1制御サイクル後、すなわちt秒後のピボットPv及び中央誘導線検出センサ15は、初期位置P2、P3からそれぞれtv[m]だけ、初期位置での芝刈り機1の中心線に沿って前方に直進したP3、P4の位置となる。
次に、ピボットPvから最も遠い配置について検討する。図9を参照して、
次に、本発明の一実施形態に係る自動走行システムについて説明する。図11は、走行経路の一例を示す図である。図12は、本発明の1つの実施形態に係る自動走行システムの全体構成を示す図である。図13は、電磁誘導線に供給される交流電流と同期信号の一例を示す図である。図14は、隣接する閉ループ電磁誘導線の交流電流の位相が揃っている場合とずれている場合の電界強度の比較図である。
10・・・本体
11・・・制御装置
12・・・車速センサ
13・・・方位角速度センサ
14・・・左側誘導線検出センサ
15・・・中央誘導線検出センサ
16・・・右側誘導線検出センサ
17・・・駆動制御部
18・・・GPSアンテナ
19・・・通信アンテナ
20・・・刈り刃(前方)
21・・・刈り刃(後方)
22・・・駆動輪
23・・・操舵輪
24・・・操作入力部
25・・・表示部
26・・・音声出力部
27・・・ステー
101・・・GPS受信部
102・・・送受信部
105・・・車両情報受信部
106・・・駆動指令部
107・・・制御情報生成部
108・・・記憶部
109・・・リムーバブル記録媒体インタフェース部
112・・・主制御部
3・・・基地局
31・・・GPS受信装置
32・・・送受信装置
35・・・GPSアンテナ
36・・・通信アンテナ
40・・・リムーバブル記録媒体
5・・・自動走行システム
51・・・第1の電源装置
511・・・第1の交流電流生成部
513・・・同期信号生成部
52・・・第2の電源装置
521・・・第2の交流電流生成部
60・・・操舵制御システム
Pv・・・ピボット
R・・・最小旋回半径
C・・・芝刈り機の中心線
D・・・最大検出距離、ずれ許容幅
E・・・電磁誘導線
CP・・・カート道
H・・・ホール
W・・・車庫
TP・・・走行経路
SWP1、SWP2・・・切り換えポイント
CL1・・・第1の閉ループ電磁誘導線
CL1P・・・第1の閉ループ電磁誘導線CL1の第1の部分
CL2・・・第2の閉ループ電磁誘導線
CL2P・・・第2の閉ループ電磁誘導線CL1の第1の部分
Claims (17)
- 電磁誘導線から発生する磁界を検出して前記電磁誘導線に沿って自動走行可能な車両のための操舵制御システムであって、
前記車両に取り付けられた複数の誘導線検出センサと、
制御サイクル毎に、前記複数の誘導線検出センサにより取得された検出データから算出した前記車両の前記電磁誘導線からのずれに基づいて、そのずれを打ち消すように前記車両を旋回させ、又は前記車両を直進させるような走行制御信号を生成し、出力する制御装置と、
を備え、
前記複数の誘導線検出センサのずれ検出基準点が、前記車両の旋回中心となるピボットから水平方向の距離l[m]だけ前方側に離れた位置に配置されており、
前記距離l[m]は、前記制御サイクルをt[秒]、前記車両が前記電磁誘導線上を走行する時の速度をv[m/秒]、前記ずれ検出基準点の前記電磁誘導線からの水平方向のずれ許容幅をD[m]、前記車両の最小旋回半径をR[m]としたとき、tv[m]以上かつ
以下である操舵制御システム。
- 前記複数の誘導線検出センサとして、一組の中央誘導線検出センサ、左側誘導線検出センサ、及び右側誘導線検出センサのみを有し、
前記ずれ検出基準点が前記車両の中央線上に配置され、中央誘導線検出センサが前記すれ検出基準点に配置され、前記左側誘導線検出センサ及び前記右側誘導線検出センサが、前記車両の中央線に垂直で前記中央誘導線検出センサを通る直線上に、前記中央誘導線検出センサの左側と右側にそれぞれ配置されている請求項1に記載の操舵制御システム。 - 前記ずれ許容幅は、前記中央誘導線検出センサから、前記中央誘導線検出センサの前記磁界を検出可能な最大の水平方向の距離である最大検出距離である請求項2に記載の操舵制御システム。
- 前記車両は、前輪と後輪とを備え、
前記前輪が、駆動輪であり、前記後輪が、操舵輪であり、
前記前輪の車軸の中心が前記ピボットである請求項1~3のいずれか1項に記載の操舵制御システム。 - 請求項1~4のいずれか1項に記載の前記操舵制御システムから出力される前記走行制御信号に基づいて自己の走行を駆動する走行駆動機構を含む車両。
- 前記車両は芝刈り機である請求項5に記載の車両。
- 電磁誘導線から発生する磁界を検出して前記電磁誘導線に沿って自動走行可能な車両のための操舵制御方法であって、
前記車両には、複数の誘導線検出センサが取り付けられており、
制御サイクル毎に、前記複数の誘導線検出センサにより取得された検出データから算出した前記車両の前記電磁誘導線からのずれに基づいて、そのずれを打ち消すように前記車両を旋回させ、又は前記車両を直進させるような走行制御信号を生成し、出力し、
前記複数の誘導線検出センサのずれ検出基準点が、前記車両の旋回中心となるピボットから水平方向の距離l[m]だけ前方側に離れた位置に配置されており、
前記距離l[m]は、前記制御サイクルをt[秒]、前記車両が前記電磁誘導線上を走行する時の速度をv[m/秒]、前記ずれ検出基準点の前記電磁誘導線からの水平方向のずれ許容幅をD[m]、前記車両の最小旋回半径をR[m]としたとき、tv[m]以上かつ
以下である操舵制御方法。
- 前記複数の誘導線検出センサとして、一組の中央誘導線検出センサ、左側誘導線検出センサ、及び右側誘導線検出センサのみを有し、
前記ずれ検出基準点が前記車両の中央線上に配置され、中央誘導線検出センサが前記すれ検出基準点に配置され、前記左側誘導線検出センサ及び前記右側誘導線検出センサが、前記車両の中央線に垂直で前記中央誘導線検出センサを通る直線上に、前記中央誘導線検出センサの左側と右側にそれぞれ配置されている請求項7に記載の操舵制御方法。 - 前記ずれ許容幅は、前記中央誘導線検出センサから、前記中央誘導線検出センサの前記磁界を検出可能な最大の水平方向の距離である最大検出距離である請求項8に記載の操舵制御方法。
- 前記車両は、前輪と後輪とを備え、
前記前輪が、駆動輪であり、前記後輪が、操舵輪であり、
前記前輪の車軸の中心が前記ピボットである請求項7~9のいずれか1項に記載の操舵制御方法。 - 請求項7~10のいずれか1項に記載の操舵制御方法をコンピュータに実行させるためのコンピュータプログラム。
- 請求項11に記載のコンピュータプログラムを記録したコンピュータ読み取り可能な記録媒体。
- 電磁誘導線から発生する磁界を検出して前記電磁誘導線に沿って自動走行可能な車両のための自動走行システムであって、
互いに交差せず互いに隣接して配置された、複数の閉ループ電磁誘導線と、
前記複数の閉ループ電磁誘導線にそれぞれ対応する電源装置と、
を含み、
前記複数の閉ループ電磁誘導線の各々の一部が、走行経路を形成するように、互いに隣接して配置され、
前記複数の閉ループ電磁誘導線毎に対応する電源装置がそれぞれ接続され、前記電源装置から前記複数の閉ループ電磁誘導線に同じ周波数の低周波の交流電流が供給される、
自動走行システム。 - 前記同じ周波数の低周波の交流電流は、同期が取られている請求項13に記載の自動走行システム。
- 前記車両は、自動走行モードとして、受信した測位信号に基づいて自動走行を行う測位モードと、電磁誘導線から発生する磁界を検出して前記電磁誘導線に沿って自動走行を行う電磁誘導モードを有し、
前記電磁誘導線が敷設されていない経路は、前記測位モードで自動走行が行われる請求項13又は14に記載の自動走行システム。 - 走行経路のうちの、測位信号を受信できない、又は測位信号の受信強度が弱い部分に前記電磁誘導線が敷設されている請求項13~15のいずれか1項に記載の自動走行システム。
- 前記車両は、請求項5又は6に記載の車両である請求項13~16のいずれか1項に記載の自動走行システム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/039882 WO2023073882A1 (ja) | 2021-10-28 | 2021-10-28 | 車両、操舵制御のためのシステム、方法、プログラム、プログラムを記録した記録媒体、自動走行システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2023073882A1 JPWO2023073882A1 (ja) | 2023-05-04 |
| JPWO2023073882A5 JPWO2023073882A5 (ja) | 2024-02-15 |
| JP7470878B2 true JP7470878B2 (ja) | 2024-04-18 |
Family
ID=86157515
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023555994A Active JP7470878B2 (ja) | 2021-10-28 | 2021-10-28 | 車両、操舵制御のためのシステム、方法、プログラム、プログラムを記録した記録媒体、自動走行システム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7470878B2 (ja) |
| WO (1) | WO2023073882A1 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3192406B2 (ja) | 1999-02-22 | 2001-07-30 | シャープ株式会社 | Cctv装置 |
| JP5345056B2 (ja) | 2006-06-30 | 2013-11-20 | コンステリウム ロールド プロダクツ−レイヴンズウッド,エルエルシー | 熱処理可能な高強度アルミニウム合金 |
| JP2020140424A (ja) | 2019-02-28 | 2020-09-03 | 日本車輌製造株式会社 | 搬送車および搬送車の操舵制御プログラム |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62175813A (ja) * | 1986-01-30 | 1987-08-01 | Komatsu Ltd | 無人車輌の曲線経路誘導方法 |
| JP2987858B2 (ja) * | 1989-12-22 | 1999-12-06 | 日本電気株式会社 | 搬送車の走行制御方法 |
| JPH05345056A (ja) * | 1992-06-17 | 1993-12-27 | Kubota Corp | ゴルフカート |
| JP4036290B2 (ja) * | 2002-08-28 | 2008-01-23 | 日本輸送機株式会社 | 無人搬送システム、及び無人搬送方法 |
-
2021
- 2021-10-28 WO PCT/JP2021/039882 patent/WO2023073882A1/ja active Application Filing
- 2021-10-28 JP JP2023555994A patent/JP7470878B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3192406B2 (ja) | 1999-02-22 | 2001-07-30 | シャープ株式会社 | Cctv装置 |
| JP5345056B2 (ja) | 2006-06-30 | 2013-11-20 | コンステリウム ロールド プロダクツ−レイヴンズウッド,エルエルシー | 熱処理可能な高強度アルミニウム合金 |
| JP2020140424A (ja) | 2019-02-28 | 2020-09-03 | 日本車輌製造株式会社 | 搬送車および搬送車の操舵制御プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2023073882A1 (ja) | 2023-05-04 |
| WO2023073882A1 (ja) | 2023-05-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2728604C2 (ru) | Система и способ отслеживания полосы для внедорожного транспортного средства и внедорожное транспортное средство | |
| US11696525B2 (en) | Automatic travel work machine, automatic travel grass mower, grass mower, and grass mower automatic travel system | |
| EP3403155B1 (en) | Self-propellered robotic tool navigation | |
| JP3467136B2 (ja) | 自律走行車の走行制御装置 | |
| EP1915894B1 (en) | Method and apparatus for creating curved swath patterns for farm machinery | |
| US8954216B2 (en) | Work machine and components thereof | |
| US20080103690A1 (en) | Nudge compensation for curved swath paths | |
| US8031086B2 (en) | Method and system for determining a position of a vehicle | |
| US8060269B2 (en) | Swath line creation including slope compensation for an automatic guidance system of a work vehicle | |
| US10378896B2 (en) | Method and system for planning the path of an agricultural vehicle | |
| CA2308605C (en) | A corner irrigation system including a gps guidance system | |
| US9821847B2 (en) | Method for guiding an off-road vehicle along a curved path | |
| CN113448327A (zh) | 一种自动行走设备的运行控制方法及自动行走设备 | |
| JP7470878B2 (ja) | 車両、操舵制御のためのシステム、方法、プログラム、プログラムを記録した記録媒体、自動走行システム | |
| JPH09120313A (ja) | 作業車の誘導制御装置 | |
| JP3236487B2 (ja) | 作業車の誘導制御装置 | |
| SE2050629A1 (en) | Method of providing a position estimate of a robotic tool, a robotic tool, and a robotic tool system | |
| US20220312669A1 (en) | Work machine system and work machine | |
| JPH09149706A (ja) | 自律走行車の走行制御装置 | |
| JP3564201B2 (ja) | 自律走行作業車の自己位置検出装置 | |
| JP6342764B2 (ja) | 自動走行車両 | |
| JPH09305229A (ja) | 移動体自動運転装置 | |
| JP6456083B2 (ja) | 自動走行車両 | |
| CN113515113A (zh) | 一种自动行走设备的运行控制方法及自动行走设备 | |
| JP2021006818A (ja) | 経路探索プログラムと、経路探索システムと、この経路探索システムを組み込んだ作業車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231215 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231215 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20231215 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240307 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240408 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7470878 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |