JP7440397B2 - ブラシレスモータ - Google Patents
ブラシレスモータ Download PDFInfo
- Publication number
- JP7440397B2 JP7440397B2 JP2020199218A JP2020199218A JP7440397B2 JP 7440397 B2 JP7440397 B2 JP 7440397B2 JP 2020199218 A JP2020199218 A JP 2020199218A JP 2020199218 A JP2020199218 A JP 2020199218A JP 7440397 B2 JP7440397 B2 JP 7440397B2
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- wiring
- connection
- phase
- coils
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Landscapes
- Brushless Motors (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
Description
ステータコア41は、積層された複数の鋼板によって環状に形成されている。ステータコア41は、ハウジング10のブラケット12に固定されている。ステータコア41には、電気的な絶縁材料によって形成されたインシュレータ43が装着されている。インシュレータ43は、例えばPBT樹脂(ポリブチレンテレフタレート)等の合成樹脂によって形成されている。
本実施形態のブラシレスモータ30では、界磁マグネット51がロータ50の外周に設けられ、ロータ50がステータ40の内側に配置されている。すなわち、本実施形態のブラシレスモータ30は、インナーロータ型のブラシレスモータである。
位置検出センサ61は、界磁マグネット51の検出(磁界変化)に応じた信号を出力する。位置検出センサ61から出力された信号は、基板60及び2つのコネクタ付きケーブル16,17のうち第二コネクタ付きケーブル17を介して不図示のコントローラ等に入力される。
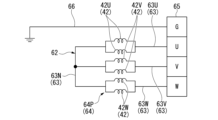
本実施形態における接続パターン62は、図4に例示するように、スター結線方式で複数のコイル42を結線する。具体的に、接続パターン62は、U相コイル42Uに接続されるU相用配線63Uと、V相コイル42Vに接続されるV相用配線63Vと、W相コイル42Wに接続されるW相用配線63Wと、U相コイル42U、V相コイル42V及びW相コイル42Wに接続される中性点用配線63Nと、を有する。
接続コネクタ65は、図2に示すように、第一面60aと反対側に向く基板60に第二面60b(カバー11の底壁13に対向する面)に設けられ、前述した第一コネクタ付きケーブル16に接続される。これにより、外部の電力を、第一コネクタ付きケーブル16、及び、基板60の接続パターン62(U相用配線63U、V相用配線63V、W相用配線63W、中性点用配線63N)を介して複数のコイル42に供給することができる。
接続パターン62のU相用配線63Uは、基板60の第一層L1と第三層L3とに跨って形成されている。U相用配線63Uは、基板60の中央部分を通るように帯状に延びている。U相用配線63Uの両端の端末結線部63Tは、U相用配線63Uの他の部分よりも径方向外側に位置する。
接続パターン62のV相用配線63Vは、基板60の第一層L1と第二層L2とに跨って形成されている。V相用配線63Vは、基板60の中央部分を通るように帯状に延びている。V相用配線63Vの両端の端末結線部63Tは、V相用配線63Vの他の部分よりも径方向外側に位置する。
接続パターン62の中性点用配線63Nは、基板60の第四層L4のみに形成されている。中性点用配線63Nは、基板60の外周部において周方向に延びる円環状に形成されている。中性点用配線63Nの6つの端末結線部63Tは、円環状の部分から径方向外側に延びている。U相用配線63U、V相用配線63V、W相用配線63Wの端末結線部63Tは、それぞれ中性点用配線63Nの円環状の部分と交差し、当該円環状の部分よりも径方向外側に位置する。
センサ用配線67は、基板60の第一層L1、第二層L2及び第四層L4に形成されている。センサ用配線67は、第四層L4において中性点用配線63Nの径方向内側の領域に形成されている。
なお、図5においては、第三層L3に形成されたU相用配線63U及びグランド用配線66(図6(c)参照)を省略している。
以下、図7~9を参照して、別のコイル42の結線パターン64と、当該結線パターン64を構成する別の基板60の接続パターン62について説明する。なお、図4~6と同じ構成要素については、同じ符号を付してその説明を省略する。
接続パターン62の第一U相用配線63U1は、基板60の第四層L4のみに形成され、基板60の外周部において周方向に延びる円弧状に形成されている。第一U相用配線63U1の両端の端末結線部63Tは、その円弧状の部分から径方向外側に延びている。第二U相用配線63U2は、基板60の第一層L1のみに形成され、基板60の外周部において延びる帯状に形成されている。第二U相用配線63U2の一端の端末結線部63Tは、第二U相用配線63U2の他の部分よりも径方向外側に位置する。
なお、図8においては、第三層L3に形成された第一W相用配線63W1及びグランド用配線66(図9(c)参照)を省略している。
減速機構70は、アウターギヤ71、インナーギヤ72、出力回転体73等によって構成されるハイポサイクロイド減速機構であって、ブラシレスモータ30(ロータ軸52)から出力される動力の回転速度を減じて出力する。本実施形態における減速機構70の減速比は10:1~40:1の範囲内のいずれかの比率である。減速機構70の出力回転体73は、電動歩行補助車の車輪に(ホイール)に連結される。
Claims (3)
- 周方向に配列された複数のコイルを有するステータと、
界磁マグネットを有し、前記ステータに対して回転するロータと、
前記ステータに装着され、複数の前記コイルにそれぞれ接続される接続パターンを有する基板と、を備え、
前記接続パターンは、複数の前記コイルにそれぞれ接続されることで前記コイルの結線パターンを構成し、
前記基板は、多層配線基板であり、
前記接続パターンは、前記基板の厚さ方向に並ぶ複数の層にそれぞれ形成された複数の接続配線によって構成され、
複数の前記接続配線はそれぞれ、前記基板の外周部で前記コイルに接続される端末結線部を有し、
複数の前記端末結線部は、前記基板の厚さ方向において互いに重ならないように、前記基板の周方向に間隔を開けて配列され、
前記ステータには、互いに異なる前記接続パターンを有することで互いに異なる前記コイルの結線パターンを構成し得る複数種類の前記基板を、選択的に装着可能であることを特徴とするブラシレスモータ。 - 周方向に配列された複数のコイルを有するステータと、
界磁マグネットを有し、前記ステータに対して回転するロータと、
前記ステータに装着され、前記ロータの回転位置を検出する位置検出センサを有する基板と、を備え、
前記基板には、複数の前記コイルにそれぞれ接続されて前記コイルの結線パターンを構成する接続パターンが設けられ、
前記基板は、多層配線基板であり、
前記接続パターンは、前記基板の厚さ方向に並ぶ複数の層にそれぞれ形成された複数の接続配線によって構成され、
複数の前記接続配線はそれぞれ、前記基板の外周部で前記コイルに接続される端末結線部を有し、
複数の前記端末結線部は、前記基板の厚さ方向において互いに重ならないように、前記基板の周方向に間隔を開けて配列されていることを特徴とするブラシレスモータ。 - 前記位置検出センサは、前記界磁マグネットを検出することを特徴とする請求項2に記載のブラシレスモータ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020199218A JP7440397B2 (ja) | 2020-11-30 | 2020-11-30 | ブラシレスモータ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020199218A JP7440397B2 (ja) | 2020-11-30 | 2020-11-30 | ブラシレスモータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022086919A JP2022086919A (ja) | 2022-06-09 |
| JP7440397B2 true JP7440397B2 (ja) | 2024-02-28 |
Family
ID=81894560
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020199218A Active JP7440397B2 (ja) | 2020-11-30 | 2020-11-30 | ブラシレスモータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7440397B2 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002058186A (ja) | 2000-08-07 | 2002-02-22 | Matsushita Seiko Co Ltd | Dcモータ |
| JP2010187434A (ja) | 2009-02-10 | 2010-08-26 | Minebea Co Ltd | モータ |
| JP2014003799A (ja) | 2012-06-18 | 2014-01-09 | Sanyo Denki Co Ltd | ブラシレスモータ |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0731115A (ja) * | 1993-07-02 | 1995-01-31 | Matsushita Electric Ind Co Ltd | Dcブラシレスモータ |
-
2020
- 2020-11-30 JP JP2020199218A patent/JP7440397B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002058186A (ja) | 2000-08-07 | 2002-02-22 | Matsushita Seiko Co Ltd | Dcモータ |
| JP2010187434A (ja) | 2009-02-10 | 2010-08-26 | Minebea Co Ltd | モータ |
| JP2014003799A (ja) | 2012-06-18 | 2014-01-09 | Sanyo Denki Co Ltd | ブラシレスモータ |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022086919A (ja) | 2022-06-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102326320B (zh) | 电机和动力转向装置 | |
| US8138644B2 (en) | Motor | |
| US10326321B2 (en) | Stator and motor using the same | |
| CN109428407B (zh) | 定子芯 | |
| CN108206598B (zh) | 电机装置及其定子 | |
| JP7060595B2 (ja) | カバー組立体、モータおよびこれを含む電動式操向装置 | |
| CN108631477B (zh) | 电动机 | |
| CN102422510A (zh) | 同步电机 | |
| WO2018135375A1 (ja) | 電動モータ | |
| CN108631473B (zh) | 电动机 | |
| JP5459561B2 (ja) | 回転電機 | |
| JP3663401B2 (ja) | 回転電機 | |
| WO2005034307A1 (ja) | 電磁モータ | |
| JP7194631B2 (ja) | ステータ、モータ、及びワイパモータ | |
| JP7440397B2 (ja) | ブラシレスモータ | |
| JP5906029B2 (ja) | 電動モータ | |
| WO2011148501A1 (ja) | ステータ | |
| JP2019037103A (ja) | ステータ及びモータ | |
| WO2009048181A1 (en) | Motor | |
| WO2017145613A1 (ja) | アキシャルギャップ型回転電機 | |
| JP5487733B2 (ja) | スイッチング素子一体型回転電機 | |
| CN109586479B (zh) | 马达和电动助力转向装置 | |
| US20260074574A1 (en) | Motor | |
| JPH0614773B2 (ja) | ブラシレスモ−タ | |
| JP7700661B2 (ja) | 回転電機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230328 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231114 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20231116 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231220 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240206 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240215 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7440397 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |