JP7435613B2 - Mobile equipment and processing systems - Google Patents
Mobile equipment and processing systems Download PDFInfo
- Publication number
- JP7435613B2 JP7435613B2 JP2021543829A JP2021543829A JP7435613B2 JP 7435613 B2 JP7435613 B2 JP 7435613B2 JP 2021543829 A JP2021543829 A JP 2021543829A JP 2021543829 A JP2021543829 A JP 2021543829A JP 7435613 B2 JP7435613 B2 JP 7435613B2
- Authority
- JP
- Japan
- Prior art keywords
- stage
- moving
- processing
- workpiece
- axis direction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012545 processing Methods 0.000 title claims description 493
- 238000000034 method Methods 0.000 claims description 64
- 230000003287 optical effect Effects 0.000 claims description 64
- 238000005259 measurement Methods 0.000 claims description 56
- 230000008569 process Effects 0.000 claims description 43
- 238000007667 floating Methods 0.000 claims description 28
- 230000001678 irradiating effect Effects 0.000 claims description 14
- 238000006073 displacement reaction Methods 0.000 description 59
- 238000003754 machining Methods 0.000 description 31
- 239000000470 constituent Substances 0.000 description 28
- 238000010521 absorption reaction Methods 0.000 description 20
- 238000005286 illumination Methods 0.000 description 20
- 239000000126 substance Substances 0.000 description 18
- 230000000694 effects Effects 0.000 description 16
- 239000007789 gas Substances 0.000 description 16
- 230000006870 function Effects 0.000 description 14
- 230000002265 prevention Effects 0.000 description 14
- 238000004590 computer program Methods 0.000 description 12
- 230000004308 accommodation Effects 0.000 description 11
- 230000002093 peripheral effect Effects 0.000 description 10
- 239000000463 material Substances 0.000 description 9
- 238000005520 cutting process Methods 0.000 description 8
- 125000006850 spacer group Chemical group 0.000 description 7
- 230000005484 gravity Effects 0.000 description 6
- 230000007246 mechanism Effects 0.000 description 6
- 230000010287 polarization Effects 0.000 description 6
- 230000008859 change Effects 0.000 description 5
- 230000008878 coupling Effects 0.000 description 5
- 238000010168 coupling process Methods 0.000 description 5
- 238000005859 coupling reaction Methods 0.000 description 5
- 230000001681 protective effect Effects 0.000 description 5
- 238000003860 storage Methods 0.000 description 5
- 238000009826 distribution Methods 0.000 description 4
- 238000003672 processing method Methods 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 238000005305 interferometry Methods 0.000 description 3
- 239000004065 semiconductor Substances 0.000 description 3
- IJGRMHOSHXDMSA-UHFFFAOYSA-N Atomic nitrogen Chemical compound N#N IJGRMHOSHXDMSA-UHFFFAOYSA-N 0.000 description 2
- 239000004698 Polyethylene Substances 0.000 description 2
- 238000002679 ablation Methods 0.000 description 2
- 230000002411 adverse Effects 0.000 description 2
- 239000004918 carbon fiber reinforced polymer Substances 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 229910001873 dinitrogen Inorganic materials 0.000 description 2
- 238000003384 imaging method Methods 0.000 description 2
- 239000011261 inert gas Substances 0.000 description 2
- 230000015654 memory Effects 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 239000012768 molten material Substances 0.000 description 2
- 229920000573 polyethylene Polymers 0.000 description 2
- 239000002699 waste material Substances 0.000 description 2
- 229910000737 Duralumin Inorganic materials 0.000 description 1
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 1
- NIXOWILDQLNWCW-UHFFFAOYSA-N acrylic acid group Chemical group C(C=C)(=O)O NIXOWILDQLNWCW-UHFFFAOYSA-N 0.000 description 1
- 229910045601 alloy Inorganic materials 0.000 description 1
- 239000000956 alloy Substances 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 201000009310 astigmatism Diseases 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 230000000052 comparative effect Effects 0.000 description 1
- 239000002131 composite material Substances 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000005553 drilling Methods 0.000 description 1
- 238000010894 electron beam technology Methods 0.000 description 1
- 239000003517 fume Substances 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000010884 ion-beam technique Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- -1 polyethylene Polymers 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 230000003595 spectral effect Effects 0.000 description 1
- 238000000859 sublimation Methods 0.000 description 1
- 230000008022 sublimation Effects 0.000 description 1
- KKEYFWRCBNTPAC-UHFFFAOYSA-L terephthalate(2-) Chemical compound [O-]C(=O)C1=CC=C(C([O-])=O)C=C1 KKEYFWRCBNTPAC-UHFFFAOYSA-L 0.000 description 1
- 238000002366 time-of-flight method Methods 0.000 description 1
- 238000012876 topography Methods 0.000 description 1
- 239000011364 vaporized material Substances 0.000 description 1
Images


































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/08—Devices involving relative movement between laser beam and workpiece
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q1/00—Members which are comprised in the general build-up of a form of machine, particularly relatively large fixed members
- B23Q1/25—Movable or adjustable work or tool supports
- B23Q1/26—Movable or adjustable work or tool supports characterised by constructional features relating to the co-operation of relatively movable members; Means for preventing relative movement of such members
- B23Q1/38—Movable or adjustable work or tool supports characterised by constructional features relating to the co-operation of relatively movable members; Means for preventing relative movement of such members using fluid bearings or fluid cushion supports
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q1/00—Members which are comprised in the general build-up of a form of machine, particularly relatively large fixed members
- B23Q1/25—Movable or adjustable work or tool supports
- B23Q1/44—Movable or adjustable work or tool supports using particular mechanisms
- B23Q1/56—Movable or adjustable work or tool supports using particular mechanisms with sliding pairs only, the sliding pairs being the first two elements of the mechanism
- B23Q1/60—Movable or adjustable work or tool supports using particular mechanisms with sliding pairs only, the sliding pairs being the first two elements of the mechanism two sliding pairs only, the sliding pairs being the first two elements of the mechanism
- B23Q1/62—Movable or adjustable work or tool supports using particular mechanisms with sliding pairs only, the sliding pairs being the first two elements of the mechanism two sliding pairs only, the sliding pairs being the first two elements of the mechanism with perpendicular axes, e.g. cross-slides
Description
本発明は、例えば、物体を移動させる移動体装置及び物体を加工する加工システムの技術分野に関する。 The present invention relates to, for example, the technical field of moving body devices that move objects and processing systems that process objects.
特許文献1には、レーザ光を物体に照射して物体を加工する加工装置が記載されている。このような物体の加工に関する技術分野では、物体の加工精度の向上が望まれている。
第1の態様によれば、第1面を有する第1部材と、前記第1面から第1方向に離れた第2面内で移動可能に設けられる第2部材と、前記第2部材に設けられ、前記第2部材を前記第1面上に浮上させる浮上部材と、前記第1方向と交差する第2方向に移動する移動部材を有する移動装置と、前記移動部材と前記第2部材とを連結する連結部材とを備え、前記連結部材の前記第1方向に関する剛性は、前記第2面と平行な方向に関する剛性よりも低い移動体装置が提供される。 According to the first aspect, a first member having a first surface, a second member provided movably within a second surface separated from the first surface in a first direction, and a second member provided on the second member. a floating member that floats the second member above the first surface; a moving device that includes a moving member that moves in a second direction intersecting the first direction; and a moving device that includes the moving member and the second member. and a connecting member that connects, and the rigidity of the connecting member in the first direction is lower than the rigidity in a direction parallel to the second surface.
第2の態様によれば、物体を載置する載置装置と、前記載置装置に載置された前記物体を加工する加工装置と、前記載置装置に載置された前記物体を計測する計測装置とを備え、前記載置装置は、第1部材の第1面から第1方向に離れた第2面内で移動可能に設けられる第2部材と、前記第2部材に設けられ、前記第2部材を前記第1面上に浮上させる浮上部材とを備える加工システムが提供される。 According to the second aspect, a mounting device for mounting an object, a processing device for processing the object mounted on the mounting device, and a processing device for measuring the object mounted on the mounting device. a measuring device; the mounting device includes a second member movably provided in a second surface spaced apart in the first direction from the first surface of the first member; and a measuring device provided on the second member; and a floating member that floats a second member above the first surface.
本発明の作用及び他の利得は次に説明する実施するための形態から明らかにされる。 The operation and other advantages of the present invention will become apparent from the detailed description below.
以下、図面を参照して移動体装置、載置装置、加工システム及び加工方法の実施形態について説明する。以下では、ワークWを加工する加工システムSYSを一例として用いて、移動体装置、載置装置、加工システム及び加工方法の実施形態を説明する。 Hereinafter, embodiments of a mobile device, a mounting device, a processing system, and a processing method will be described with reference to the drawings. Below, embodiments of a moving body device, a mounting device, a processing system, and a processing method will be described using a processing system SYS that processes a workpiece W as an example.
また、以下の説明では、互いに直交するX軸、Y軸及びZ軸から定義されるXYZ直交座標系を用いて、加工システムSYSを構成する各種構成要素の位置関係について説明する。尚、以下の説明では、説明の便宜上、X軸方向及びY軸方向のそれぞれが水平方向(つまり、水平面内の所定方向)であり、Z軸方向が鉛直方向(つまり、水平面に直交する方向であり、実質的には上下方向或いは重力方向)であるものとする。また、X軸、Y軸及びZ軸周りの回転方向(言い換えれば、傾斜方向)を、それぞれ、θX方向、θY方向及びθZ方向と称する。ここで、Z軸方向を重力方向としてもよい。また、XY平面を水平方向としてもよい。 Furthermore, in the following description, the positional relationships of various components constituting the processing system SYS will be explained using an XYZ orthogonal coordinate system defined by mutually orthogonal X, Y, and Z axes. In the following explanation, for convenience of explanation, each of the X-axis direction and the Y-axis direction is a horizontal direction (that is, a predetermined direction within a horizontal plane), and the Z-axis direction is a vertical direction (that is, a direction perpendicular to the horizontal plane). It is assumed that the vertical direction is substantially the vertical direction or the direction of gravity). Further, the rotation directions (in other words, the tilt directions) around the X-axis, Y-axis, and Z-axis are referred to as the θX direction, the θY direction, and the θZ direction, respectively. Here, the Z-axis direction may be the direction of gravity. Further, the XY plane may be set in the horizontal direction.
(1)第1実施形態の加工システムSYS
初めに、第1実施形態の加工システムSYS(以降、第1実施形態の加工システムSYSを、“加工システムSYSa”と称する)について説明する。 (1) Processing system SYS of the first embodiment
First, the processing system SYS of the first embodiment (hereinafter, the processing system SYS of the first embodiment will be referred to as the "processing system SYSa") will be described.
(1-1)第1実施形態の加工システムSYSaの全体構造
初めに、図1を参照しながら、第1実施形態の加工システムSYSaの全体構造について説明する。図1は、第1実施形態の加工システムSYSaの全体構造を示す断面図である。尚、図面の簡略化のために、図1は、加工システムSYSaの一部の構成要素については、その断面を示していない。 (1-1) Overall structure of the processing system SYSa of the first embodiment First, the overall structure of the processing system SYSa of the first embodiment will be described with reference to FIG. FIG. 1 is a cross-sectional view showing the overall structure of the processing system SYSa according to the first embodiment. Note that, in order to simplify the drawing, FIG. 1 does not show the cross section of some of the components of the processing system SYSa.
図1に示すように、加工システムSYSaは、加工装置1と、計測装置2と、ステージ装置3と、筐体4と、駆動系5と、駆動系6と、制御装置7とを備える。
As shown in FIG. 1, the processing system SYSa includes a
加工装置1は、制御装置7の制御下で、ワークWを加工可能である。ワークWは、例えば、金属であってもよいし、合金(例えば、ジュラルミン等)であってもよいし、半導体(例えば、シリコン)であってもよいし、樹脂(例えば、アクリルやPET(ポリエチレンテレフタラート)であってもよいし、CFRP(Carbon Fiber Reinforced Plastic)等の複合材料であってもよいし、ガラスであってもよいし、それ以外の任意の材料から構成される物体であってもよい。
The
加工装置1は、ワークWを加工するために、ワークWに対して加工光ELを照射する。加工光ELは、ワークWに照射されることでワークWを加工可能である限りは、どのような種類の光であってもよい。第1実施形態では、加工光ELがレーザ光である例を用いて説明を進めるが、加工光ELは、レーザ光とは異なる種類の光であってもよい。更に、加工光ELの波長は、ワークWに照射されることでワークWを加工可能である限りは、どのような波長であってもよい。例えば、加工光ELは、可視光であってもよいし、不可視光(例えば、赤外光及び紫外光の少なくとも一方等)であってもよい。
The
第1実施形態では、加工装置1は、ワークWに加工光ELを照射して、ワークWの一部を除去する除去加工を行うものとする。但し、後述するように、加工装置1は、除去加工とは異なる加工(例えば、付加加工又はマーキング加工)を行ってもよい。除去加工は、ワークWの一部を除去して平面を形成する平面加工、ワークWの一部を除去して曲面を形成する曲面加工、ワークの一部を除去して穴を形成する穴あけ加工、ワークの一部を除去してポケットを形成するポケット加工、ワークを切断する切断加工、及び、任意の文字若しくは任意のパターンを形成する(言い換えれば、刻む)彫刻加工(言い換えれば、刻印加工)の少なくとも一つを含んでいてもよい。
In the first embodiment, the
ここで、図2(a)から図2(c)のそれぞれを参照しながら、加工光ELを用いた除去加工の一例について説明する。図2(a)から図2(c)のそれぞれは、ワークWに対して行われる除去加工の様子を示す断面図である。図2(a)に示すように、加工装置1は、ワークWの表面に設定(言い換えれば、形成)される照射領域EAに対して加工光ELを照射する。照射領域EAに加工光ELが照射されると、ワークWのうち照射領域EAに近接する部分に、加工光ELのエネルギが伝達される。加工光ELのエネルギに起因した熱が伝達されると、加工光ELのエネルギに起因した熱によって、ワークWのうち照射領域EAに近接する部分を構成する材料が溶融する。溶融した材料は、液滴となって飛散する。或いは、溶融した材料は、加工光ELのエネルギに起因した熱によって蒸発する。その結果、ワークWのうち照射領域EAに近接する部分が除去される。つまり、図2(b)に示すように、ワークWの表面に凹部(一例として溝部)が形成される。この場合、加工装置1は、いわゆる熱加工の原理を利用して、ワークWを加工しているといえる。更に、加工光ELがワークWの表面を走査すると、ワークWの表面上で照射領域EAが移動する。その結果、図2(c)に示すように、加工光ELの走査軌跡(つまり、照射領域EAの移動軌跡)に沿って、ワークWの表面が少なくとも部分的に除去される。つまり、加工光ELの走査軌跡(つまり、照射領域EAの移動軌跡)に沿って、ワークWの表面が実質的に削り取られる。このため、加工装置1は、除去加工したい領域に対応する所望の走査軌跡に沿って加工光ELにワークWの表面上を走査させることで、ワークWのうち除去加工したい部分を適切に除去することができる。
Here, an example of removal processing using processing light EL will be described with reference to FIGS. 2(a) to 2(c). Each of FIGS. 2(a) to 2(c) is a cross-sectional view showing how the removal process is performed on the workpiece W. As shown in FIG. 2(a), the
一方で、加工光ELの特性によっては、加工装置1は、非熱加工(例えば、アブレーション加工)の原理を利用して、ワークWを加工することも可能である。つまり、加工装置1は、ワークWに対して非熱加工(例えば、アブレーション加工)を行ってもよい。例えば、発光時間がピコ秒以下(或いは、場合によっては、ナノ秒又はフェムト秒以下)のパルス光が加工光ELとして用いられると、ワークWのうち照射領域EAに近接する部分を構成する材料は、瞬時に蒸発及び飛散する。尚、発光時間がピコ秒以下(或いは、場合によっては、ナノ秒又はフェムト秒以下)のパルス光が加工光ELとして用いられる場合、ワークWのうち照射領域EAに近接する部分を構成する材料は、溶融状態を経ずに昇華することもある。このため、非熱加工によって加工されるワークWの様子を示す断面図である図3(a)から図3(c)に示すように、加工システムSYSaは、加工光ELのエネルギに起因した熱によるワークWへの影響を極力抑制しながら、ワークWの表面に凹部(言い換えれば、溝部)が形成可能となる。
On the other hand, depending on the characteristics of the processing light EL, the
尚、このような除去加工を行う加工装置1の構造については、後に図4等を参照しながら詳述するため、ここでの詳細な説明は省略する。
Note that the structure of the
再び図1において、計測装置2は、制御装置7の制御下で、計測対象物を計測可能である。計測対象物は、例えばワークWを含む。例えば、計測装置2は、ワークWの状態を計測可能な装置であってもよい。ワークWの状態は、ワークWの位置を含んでいてもよい。ワークWの位置は、ワークWの表面の位置を含んでいてもよい。ワークWの表面の位置は、ワークWの表面を細分化した各部位のX軸方向、Y軸方向及びZ軸方向の少なくとも一つにおける位置を含んでいてもよい。ワークWの状態は、ワークWの形状(例えば、3次元形状)を含んでいてもよい。ワークWの形状は、ワークWの表面の形状を含んでいてもよい。ワークWの表面の形状は、上述したワークWの表面の位置に加えて又は代えて、ワークWの表面を細分化した各部位の向き(例えば、各部位の法線の向きであり、X軸、Y軸及びZ軸の少なくとも一つに対する各部位の傾斜量と実質的に等価)を含んでいてもよい。ワークWの状態は、ワークWのサイズ(例えば、X軸方向、Y軸方向及びZ軸方向の少なくとも一つにおけるサイズ)を含んでいてもよい。計測装置2の計測結果に関する計測情報は、計測装置2から制御装置7に出力される。
Referring again to FIG. 1, the measuring
計測装置2の一例として、ワークWの表面にスリット光を投影すると共に投影されたスリット光の形状を計測する光切断法を用いてワークWを計測する計測装置があげられる。計測装置2の他の一例として、ワークWを介した白色光とワークWを介していない白色光との干渉パターンを計測する白色干渉法を用いてワークWを計測する計測装置があげられる。尚、ここで言う白色光は、単色光に対して波長幅(スペクトル幅)を持つ光を意味していてもよい。但し、計測装置2は、光切断法及び白色干渉法とは異なるその他の方法を用いて、ワークWを計測してもよい。その他の方法の一例として、ワークWの表面に光パターンを投影し、投影されたパターンの形状を計測するパターン投影法、ワークWの表面に光を投射し且つ投射された光が戻ってくるまでの時間からワークWまでの距離を測定する動作をワークW上の複数の位置で行うタイム・オブ・フライト法、モアレトポグラフィ法(具体的には、格子照射法若しくは格子投影法)、ホログラフィック干渉法、オートコリメーション法、ステレオ法、非点収差法、臨界角法、及び、ナイフエッジ法の少なくとも一つがあげられる。いずれの場合においても、計測装置2は、計測光(例えば、スリット光又は白色光)を射出する光源と、計測光が照射されたワークWからの光(例えば、計測光の反射光)を受光する受光器とを備えていてもよい。受光器は、単一のフォトディテクタを含んでいてもよいし、一次元方向に配列された複数のフォトディテクタを含んでいてもよいし、二次元方向に配列された複数のフォトディテクタを含んでいてもよい。
An example of the measuring
ステージ装置3は、加工装置1及び計測装置2の下方(つまり、-Z側)に配置される(つまり、設けられる)。ステージ装置3は、定盤31と、ステージ32とを備える。定盤31は、筐体4の底面F上(或いは、筐体4が載置される床面等の支持面上)に配置される。定盤31上には、ステージ32が配置される。ステージ32は、ステージ32の下面(つまり、-Z側を向いた面)322が定盤31の上面(つまり、+Z側を向いた面)311に対向するように、定盤31上に配置される。特に、後に詳述するように、ステージ32は、ステージ32の下面322が定盤31の上面311からZ軸方向に沿って離れるように、定盤31上に配置される。筐体4の底面或いは筐体4が載置される床面等の支持面と定盤31との間には、定盤31の振動のステージ32への伝達を低減するための不図示の防振装置が設置されていてもよい。更に、定盤31上には(特に、定盤31の上面311上には)、加工装置1及び計測装置2を支持する支持フレーム8が配置されていてもよい。加工装置1及び計測装置2(更には、ステージ32)は、同じ定盤31によって支持されていてもよい。但し、加工装置1の少なくとも一部が、定盤31上に配置されていなくてもよい。計測装置2の少なくとも一部が、定盤31上に配置されていなくてもよい。加工装置1の少なくとも一部と、計測装置2の少なくとも一部とが、それぞれ異なる定盤(或いは、その他の支持面)上に配置されていてもよい。尚、ステージ装置3は、定盤31を備えていてもよい。この場合、筐体4の構造体上に、ステージ32が配置されていてもよい。
The
ステージ32は、石英ガラスから構成されていてもよいし、その他の材料(例えば、金属、セラミックス等)から構成されていてもよい。ステージ32上には、ワークWが載置される。具体的には、ステージ32の上面は、ワークWを載置可能な載置面321を含む。載置面321は、XY平面に平行な面である。載置面321は、下面322とは逆側の面である。ワークWは、載置面321上に載置される。このため、ステージ32は、ワークWが載置される載置部材として用いられる。この際、ステージ32は、載置されたワークWを保持しなくてもよい。ステージ32は、載置されたワークWに、ワークWを保持するための外力を加えなくてもよい。ワークWは、外力を加えられることなくステージ32上に載置されてもよい。或いは、ステージ32は、載置されたワークWを保持してもよい。ステージ32は、載置されたワークWに、ワークWを保持するための外力を加えてもよい。ワークWは、外力を加えられた状態でステージ32上に載置されてもよい。この場合、ステージ32は、ワークWを保持する保持部材として用いられてもよい。例えば、ステージ32は、ワークWを真空吸着及び/又は静電吸着することで、ワークWを保持してもよい。尚、ワークWが載置されるステージ32をステージ装置3が備えているがゆえに、ステージ装置3は、載置装置と称されてもよい。
The
ステージ32は、制御装置7の制御下で、ワークWが載置されたまま定盤31上(特に、定盤31の上面311上)を移動可能である。この際、定盤31の上面311は、ステージ32の移動に関するガイド面として用いられてもよい。ステージ32は、定盤31、加工装置1及び計測装置2の少なくとも一つに対して移動可能である。ステージ32は、X軸方向及びY軸方向のそれぞれに沿って移動可能である。この場合、ステージ32は、XY平面に平行なステージ走り面に沿って移動可能である。尚、ステージ32は、X軸方向及びY軸方向の少なくとも一つに加えて又は代えて、Z軸方向、θX方向、θY方向及びθZ方向の少なくとも一つに沿って移動可能であってもよい。尚、移動可能な(つまり、移動体である)ステージ32をステージ装置3が備えているがゆえに、ステージ装置3は、移動体装置と称されてもよい。
The
尚、このようなステージ32を移動させることが可能なステージ装置3の構造については、後に図6等を参照しながら詳述するため、ここでの詳細な説明は省略する。
Note that the structure of the
筐体4は、筐体4の外部の空間に対して隔てられた内部の収容空間SPに、加工装置1、計測装置2及びステージ装置3を収容する。つまり、第1実施形態では、加工装置1、計測装置2及びステージ装置3は、同じ筐体4に配置されている。加工装置1、計測装置2及びステージ装置3は、同じ収容空間SPに配置されている。ステージ装置3のステージ32にワークWが載置されている場合には、筐体4は、その内部の収容空間SPにワークWを収容する。つまり、加工装置1、計測装置2及びワークWは、同じ収容空間SPに配置されている。但し、加工装置1の少なくとも一部が収容空間SPに配置されていなくてもよい。加工装置1の少なくとも一部が、筐体4の外部に配置されていなくてもよい。計測装置2の少なくとも一部が収容空間SPに配置されていなくてもよい。計測装置2の少なくとも一部が、筐体4の外部に配置されていなくてもよい。ステージ装置3の少なくとも一部が収容空間SPに配置されていなくてもよい。ステージ装置3の少なくとも一部が、筐体4の外部に配置されていなくてもよい。
The
駆動系5は、制御装置7の制御下で、加工装置1を移動させる。駆動系5は、定盤31、ステージ32及びステージ32に載置されたワークWの少なくとも一つに対して加工装置1を移動させる。駆動系5は、計測装置2に対して加工装置1を移動させてもよい。駆動系5は、加工装置1を、X軸方向、Y軸方向、Z軸方向、θX方向、θY方向及びθZ方向の少なくとも一つに沿って移動させる。駆動系5は、例えば、モータ等を含む。更に、加工システムSYSaは、駆動系5が移動させる加工装置1の位置を計測可能な位置計測器51を備えている。位置計測器51は、例えば、エンコーダ及びレーザ干渉計のうちの少なくとも一方を含んでいてもよい。
The
駆動系5が加工装置1を移動させると、ワークW上において、照射領域EAが移動する。更に、駆動系5が加工装置1を移動させると、ワークW上において、加工ショット領域PSA(後述する図5参照))もまた移動する。従って、駆動系5は、加工装置1を移動させることで、ワークWと照射領域EA及び加工ショット領域PSAのそれぞれとの位置関係を変更可能である。尚、第1実施形態における「加工ショット領域PSA」は、加工装置1と加工対象物(例えば、ワークW)との位置関係を固定した状態で(つまり、変更することなく)加工装置1による加工が行われる領域(言い換えれば、範囲)を示す。典型的には、加工ショット領域PSAは、後述する図5に示すように、加工装置1と加工対象物との位置関係を固定した状態で加工装置1が備えるガルバノミラー141によって偏向される加工光ELの走査範囲と一致する又は当該走査範囲よりも狭い領域になるように設定される。言い換えれば、加工ショット領域PSAは、加工装置1と加工対象物との位置関係を固定した状態で加工光ELが照射される照射領域EAが移動可能な範囲と一致する又は当該範囲よりも狭い領域になるように設定される。このため、加工ショット領域PSAは、加工装置1を基準に定まる領域(つまり、加工装置1と所定の位置関係を有する領域)になる。
When the
但し、ステージ32が移動可能であるがゆえに、加工装置1が移動可能でなくても、ワークWと照射領域EA及び加工ショット領域PSAのそれぞれとの位置関係を変更可能である。このため、加工装置1が移動可能でなくてもよい。この場合、加工システムSYSaは、駆動系5を備えていなくてもよい。加工装置1が移動しない場合には、加工システムSYSは、位置計測器51を備えていなくてもよい。
However, since the
また、第1実施形態においては、ステージ32がX軸方向及びY軸方向のそれぞれに移動可能であるため、加工装置1はZ軸方向に移動可能であってもよい。このとき、加工装置1のZ軸方向への移動によって、加工光ELのフォーカス位置が制御されてもよい。加工装置1のZ軸への移動によって、観察装置16のピント位置が制御されてもよい。
Further, in the first embodiment, since the
駆動系6は、制御装置7の制御下で、計測装置2を移動させる。駆動系6は、定盤31、ステージ32及びステージ32に載置されたワークWの少なくとも一つに対して計測装置2を移動させる。駆動系6は、加工装置1に対して計測装置2を移動させてもよい。駆動系6は、計測装置2を、X軸方向、Y軸方向、Z軸方向、θX方向、θY方向及びθZ方向の少なくとも一つに沿って移動させる。駆動系6は、例えば、モータ等を含む。更に、加工システムSYSaは、駆動系6が移動させる計測装置2の位置を計測可能な位置計測器61を備えている。位置計測器61は、例えば、エンコーダ及びレーザ干渉計のうちの少なくとも一方を含んでいてもよい。
The drive system 6 moves the measuring
駆動系6が計測装置2を移動させると、ワークW上において、計測ショット領域MSAが移動する。従って、駆動系6は、計測装置2を移動させることで、ワークWと計測ショット領域MSAとの位置関係を変更可能である。尚、第1実施形態における「計測ショット領域MSA」は、計測装置2と計測対象物(例えば、ワークW)との位置関係を固定した状態で(つまり、変更することなく)計測装置2による計測が行われる領域(言い換えれば、範囲)を示す。例えば、計測装置2が光切断法を用いる計測装置である場合には、典型的には、計測ショット領域MSAは、計測装置2と計測対象物との位置関係を固定した状態で光切断法に用いられるスリット光を照射可能な範囲(例えば、スリット光の走査範囲)と一致するように又は当該範囲よりも狭い範囲になるように設定されてもよい。例えば、計測装置2が白色干渉法を用いる計測装置である場合には、典型的には、計測ショット領域MSAは、計測装置2と計測対象物との位置関係を固定した状態で白色干渉法に用いられる白色光を照射可能な範囲(例えば、白色光の走査範囲)と一致するように又は当該範囲よりも狭い範囲になるように設定されてもよい。計測ショット領域MSAは、計測装置2と計測対象物との位置関係を固定した状態でスリット光及び/又は白色光が照射されたワークWからの光を受光する受光器の受光面(例えば、単一のフォトディテクタ、又は、一次元方向若しくは二次元方向に配列された複数のフォトディテクタの受光面)に対応する範囲になるように設定されてもよい。このため、計測ショット領域MSAは、計測装置2を基準に定まる領域(つまり、計測装置2と所定の位置関係を有する領域)になる。このような計測ショット領域MSAを、計測装置2の計測可能範囲又は計測可能フィールドと称してもよい。
When the drive system 6 moves the measuring
但し、ステージ32が移動可能であるがゆえに、計測装置2が移動可能でなくても、ワークWと計測ショット領域MSAとの位置関係を変更可能である。このため、計測装置2が移動可能でなくてもよい。この場合、加工システムSYSaは、駆動系6を備えていなくてもよい。計測装置2が移動しない場合には、加工システムSYSは、位置計測器61を備えていなくてもよい。
However, since the
また、第1実施形態においては、ステージ32がX軸方向及びY軸方向のそれぞれに移動可能であるため、計測装置2はZ軸方向に移動可能であってもよい。このとき、計測装置2のZ軸方向への移動によって、計測装置2のピント位置が制御されてもよい。
Further, in the first embodiment, since the
制御装置7は、加工システムSYSaの動作を制御する。制御装置7は、例えば、演算装置と記憶装置とを含んでいてもよい。演算装置は、例えば、CPU(Central Processing Unit)及びGPU(Graphics Processing Unit))の少なくとも一方を含んでいてもよい。制御装置7は、演算装置がコンピュータプログラムを実行することで、加工システムSYSaの動作を制御する装置として機能する。このコンピュータプログラムは、制御装置7が行うべき後述する動作を制御装置7(例えば、演算装置)に行わせる(つまり、実行させる)ためのコンピュータプログラムである。つまり、このコンピュータプログラムは、加工システムSYSaに後述する動作を行わせるように制御装置7を機能させるためのコンピュータプログラムである。演算装置が実行するコンピュータプログラムは、制御装置7が備える記憶装置(つまり、記録媒体)に記録されていてもよいし、制御装置7に内蔵された又は制御装置7に外付け可能な任意の記憶媒体(例えば、ハードディスクや半導体メモリ)に記録されていてもよい。或いは、演算装置は、実行するべきコンピュータプログラムを、ネットワークインタフェースを介して、制御装置7の外部の装置からダウンロードしてもよい。
The
制御装置7は、加工システムSYSaの内部に設けられていなくてもよく、例えば、加工システムSYSa外にサーバ等として設けられていてもよい。この場合、制御装置7と加工システムSYSaとは、有線及び/又は無線のネットワーク(或いは、データバス及び/又は通信回線)で接続されていてもよい。有線のネットワークとして、例えばIEEE1394、RS-232x、RS-422、RS-423、RS-485及びUSBの少なくとも一つに代表されるシリアルバス方式のインタフェースを用いるネットワークが用いられてもよい。有線のネットワークとして、パラレルバス方式のインタフェースを用いるネットワークが用いられてもよい。有線のネットワークとして、10BASE-T、100BASE-TX及び1000BASE-Tの少なくとも一つに代表されるイーサネット(登録商標)に準拠したインタフェースを用いるネットワークが用いられてもよい。無線のネットワークとして、電波を用いたネットワークが用いられてもよい。電波を用いたネットワークの一例として、IEEE802.1xに準拠したネットワーク(例えば、無線LAN及びBluetooth(登録商標)の少なくとも一方)があげられる。無線のネットワークとして、赤外線を用いたネットワークが用いられてもよい。無線のネットワークとして、光通信を用いたネットワークが用いられてもよい。この場合、制御装置7と加工システムSYSaとはネットワークを介して各種の情報の送受信が可能となるように構成されていてもよい。また、制御装置7は、ネットワークを介して加工システムSYSaにコマンドや制御パラメータ等の情報を送信可能であってもよい。加工システムSYSaは、制御装置7からのコマンドや制御パラメータ等の情報を、上記ネットワークを介して受信する受信装置を備えていてもよい。或いは、制御装置7が行う処理のうちの一部を行う第1制御装置が加工システムSYSaの内部に設けられている一方で、制御装置7が行う処理のうちの他の一部を行う第2制御装置が加工システムSYSaの外部に設けられていてもよい。
The
尚、演算装置が実行するコンピュータプログラムを記録する記録媒体としては、CD-ROM、CD-R、CD-RWやフレキシブルディスク、MO、DVD-ROM、DVD-RAM、DVD-R、DVD+R、DVD-RW、DVD+RW及びBlu-ray(登録商標)等の光ディスク、磁気テープ等の磁気媒体、光磁気ディスク、USBメモリ等の半導体メモリ、及び、その他プログラムを格納可能な任意の媒体の少なくとも一つが用いられてもよい。記録媒体には、コンピュータプログラムを記録可能な機器(例えば、コンピュータプログラムがソフトウェア及びファームウェア等の少なくとも一方の形態で実行可能な状態に実装された汎用機器又は専用機器)が含まれていてもよい。更に、コンピュータプログラムに含まれる各処理や機能は、制御装置7(典型的にはコンピュータ)がコンピュータプログラムを実行することで制御装置7内に実現される論理的な処理ブロックによって実現されてもよいし、制御装置7が備える所定のゲートアレイ(FPGA、ASIC)等のハードウェアによって実現されてもよいし、論理的な処理ブロックとハードウェアの一部の要素を実現する部分的ハードウェアモジュールとが混在する形式で実現してもよい。
Note that recording media for recording computer programs executed by arithmetic units include CD-ROM, CD-R, CD-RW, flexible disk, MO, DVD-ROM, DVD-RAM, DVD-R, DVD+R, and DVD-. At least one of optical disks such as RW, DVD+RW, and Blu-ray (registered trademark), magnetic media such as magnetic tape, magneto-optical disks, semiconductor memories such as USB memory, and other arbitrary media capable of storing programs is used. It's okay. The recording medium may include a device capable of recording a computer program (for example, a general-purpose device or a dedicated device in which a computer program is implemented in an executable state in the form of at least one of software and firmware). Furthermore, each process or function included in the computer program may be realized by a logical processing block that is realized within the
(1-2)加工装置1の構造
続いて、図4を参照しながら、加工装置1の構造について説明する。図4は、加工装置1の構造を示す断面図である。 (1-2) Structure of
図4に示すように、加工装置1は、加工装置1の構造を示す断面図である図4に示すように、光源11と、光学系12と、ダイクロイックミラー13と、光学系14と、戻り光防止装置15と、観察装置16とを備えている。尚、図4に示す加工装置1の構造はあくまで一例である。このため、加工装置1は、加工光ELを用いてワークWを加工可能である限りは、どのような構造を有していてもよい。つまり、加工装置1は、光源11と、光学系12と、ダイクロイックミラー13と、光学系14と、戻り光防止装置15と、観察装置16との少なくとも一つを必ずしも備えていなくてもよい。
As shown in FIG. 4, which is a cross-sectional view showing the structure of the
光源11は、加工光ELを生成可能である。加工光ELがレーザ光である場合には、光源11は、例えば、レーザダイオードであってもよい。更に、光源11は、パルス発振可能な光源であってもよい。この場合、光源11は、パルス光(例えば、発光時間がピコ秒以下のパルス光)を加工光ELとして生成可能である。光源11は、生成した加工光ELを、光学系12に向けて射出する。尚、光源11は直線偏光状態の加工光ELを射出してもよい。
The light source 11 can generate processing light EL. When the processing light EL is a laser beam, the light source 11 may be, for example, a laser diode. Furthermore, the light source 11 may be a light source capable of pulse oscillation. In this case, the light source 11 can generate pulsed light (for example, pulsed light whose emission time is less than picoseconds) as the processing light EL. The light source 11 emits the generated processing light EL toward the
光学系12は、光源11から射出された加工光ELが入射する光学系である。光学系12は、光学系12に入射した加工光ELを、戻り光防止装置15に向けて射出する光学系である。つまり、光学系12は、光源11から射出された加工光ELを、戻り光防止装置15に導く光学系である。
The
光学系12は、光源11から射出された加工光ELの状態を制御すると共に、状態が制御された加工光ELを、戻り光防止装置15に向けて射出してもよい。例えば、光学系12は、加工光ELのビーム径(つまり、加工光ELの進行方向に交差する面内における加工光ELのサイズ)を制御してもよい。光学系12は、加工光ELのビーム径を制御することで、ワークWの表面における加工光ELのビーム径(つまり、スポット径)を制御してもよい。この場合、光学系12は、ビームエキスパンダ121を備えていてもよい。例えば、光学系12は、光学系12から射出される加工光の収斂度或いは発散度を制御してもよい。これにより、加工光ELのフォーカス位置(例えば、いわゆるベストフォーカス位置)が制御される。この場合、光学系12は、フォーカスレンズ122を備えていてもよい。フォーカスレンズ122は、1以上のレンズで構成され、その少なくとも一部のレンズの光軸方向に沿った位置を調整することで、加工光ELの収斂度又は発散度を変更して加工光ELのフォーカス位置を調整するための光学素子である。尚、フォーカスレンズ122は、ビームエキスパンダ121と一体化されていてもよいし、ビームエキスパンダ121と別体であってもよい。例えば、光学系12は、加工光ELの進行方向に交差する面内における加工光ELの強度分布を制御してもよい。この場合、光学系12は、加工光ELの強度分布を制御可能な強度分布制御部材123を備えていてもよい。尚、光学系12によって制御される加工光ELの状態は、加工光ELのフォーカス位置、加工光ELのビーム径、加工光ELの収斂度、加工光ELの発散度及び加工光ELの強度分布に加えて又は代えて、加工光ELのパルス長、加工光ELのパルス数、加工光ELの強度、加工光ELの進行方向及び加工光ELの偏光状態の少なくとも一つを含んでいてもよい。
The
ダイクロイックミラー13は、光学系12から戻り光防止装置15を介してダイクロイックミラー13に入射する加工光ELを、光学系14に導く。ダイクロイックミラー13は、加工光EL及び当該加工光ELと異なる波長の観察光(照明光IL及び反射光ILr)のうち一方を反射し他方を透過する。図4に示す例では、ダイクロイックミラー13は、加工光ELを光学系14に向けて反射することで加工光ELを光学系14に導いている。但し、ダイクロイックミラー13は、加工光ELを通過させることで加工光ELを光学系14に導いてもよい。
The
光学系14は、ダイクロイックミラー13からの加工光ELを、ワークWに照射する(つまり、ワークWに導く)ための光学系である。加工光ELをワークWに照射するために、光学系14は、ガルバノミラー141と、fθレンズ142とを備える。ガルバノミラー141は、fθレンズ142からの加工光ELがワークWを走査する(つまり、加工光ELが照射される照射領域EAがワークWの表面を移動する)ように、加工光ELを偏向する。尚、光学系14は、ガルバノミラー141に加えて又は代えて、ポリゴンミラーを用いて加工光ELを偏向してもよい。ガルバノミラー141は、光学系14の構造を示す斜視図である図5に示すように、X走査ミラー141Xと、Y走査ミラー141Yとを備える。X走査ミラー141Xは、加工光ELをY走査ミラー141Yに向けて反射する。X走査ミラー141Xは、θY方向(つまり、Y軸周りの回転方向)を軸として揺動又は回転可能である。X走査ミラー141Xの揺動又は回転により、加工光ELは、ワークWの表面をX軸方向に沿って走査する。X走査ミラー141Xの揺動又は回転により、照射領域EAは、ワークWの表面上をX軸方向に沿って移動する。Y走査ミラー141Yは、加工光ELをfθレンズ142に向けて反射する。Y走査ミラー141Yは、θX方向(つまり、X軸周りの回転方向)を軸として揺動又は回転可能である。Y走査ミラー141Yの揺動又は回転により、加工光ELは、ワークWの表面をY軸方向に沿って走査する。Y走査ミラー141Yの揺動又は回転により、照射領域EAは、ワークWの表面上をY軸方向に沿って移動する。fθレンズ142は、ガルバノミラー141からの加工光ELをワークW上に集光するための光学素子である。尚、X走査ミラー141Xは、θY方向(つまり、Y軸周りの回転方向)から若干傾いた方向を軸として揺動又は回転可能であってもよい。Y走査ミラー141Yは、θX方向(つまり、X軸周りの回転方向)から若干傾いた方向を軸として揺動又は回転可能であってもよい。尚、第1実施形態では、fθレンズ142が射出面側(ワークW側)テレセントリックな光学系であるが、fθレンズ142としては、テレセントリックな光学系でなくてもよい。fθレンズ142が射出面側(ワークW側)テレセントリックな光学系である場合には、ワークWの厚み(Z軸方向のサイズ)が変わっても加工光ELのXY面内で照射位置が変わらないという利点がある。
The
再び図4において、戻り光防止装置15は、ワークWによって反射した加工光ELである戻り光ELrが光学系12及び光源11へと戻ることを防止する。一方で、戻り光防止装置15は、光学系12が射出した加工光ELをダイクロイックミラー13へと導く(つまり、ワークWへと導く)。戻り光ELrが光学系12及び光源11へと戻ることを防止しながら加工光ELをダイクロイックミラー13へと導くために、戻り光防止装置15は、例えば、偏光を利用してもよい。このような偏光を利用する戻り光防止装置15を用いる場合には、光源11は、例えば、直線偏光状態の加工光ELを射出してもよい。戻り光防止装置15は、例えば、1/2波長板151と、偏光ビームスプリッタ152と、1/4波長板153と、1/2波長板154と、ビームディフューザー155とを備えている。1/2波長板151は、光学系12からの加工光ELの偏光方向を変更する。例えば、1/2波長板151は、光学系12からの加工光ELの偏光方向を、偏光ビームスプリッタ152を通過可能な方向に変更する。1/2波長板151を通過した加工光ELは、偏光ビームスプリッタ152を通過する。ここでは、説明の便宜上、偏光ビームスプリッタ152が、偏光ビームスプリッタ152の偏光分離面に対してp偏光を通過させる一方でs偏光を反射させる例を用いて説明を進める。つまり、偏光ビームスプリッタ152を通過した加工光ELがp偏光である例を用いて説明を進める。偏光ビームスプリッタ152を通過した加工光ELは、1/4波長板153を通過して円偏光になる。1/4波長板153を通過した加工光ELは、1/2波長板154を通過してその偏光の楕円度が調整される。円偏光になった加工光ELは、ダイクロイックミラー13に入射する。このため、戻り光防止装置15は、加工光ELをダイクロイックミラー13へと導くことができる。一方で、戻り光防止装置15に入射した戻り光ELrは、1/2波長板154を介して1/4波長板153に入射する。このとき、戻り光ELrは、ワークWの表面で反射された加工光ELであるため、戻り光ELrの回転方向は、加工光ELの回転方向に対して反転している。このため、1/2波長板154及び1/4波長板153を通過した戻り光ELrは、s偏光になる。その結果、1/4波長板153を通過した戻り光ELrは、偏光ビームスプリッタ152によって反射される。偏光ビームスプリッタ152が反射した戻り光ELrは、ビームディフューザー155によって吸収される。このため、戻り光防止装置15は、戻り光ELrが光学系12及び光源11へと戻ることを防止することができる。尚、直線偏光状態の加工光でワークWを加工する場合には、1/4波長板154とワークWとの間の光路中に1/4波長板を配置してもよい。また、1/4波長板153を光路から外して、直線偏光状態の加工光でワークWを加工してもよい。
Referring again to FIG. 4, the return
観察装置16は、ワークWの表面の状態を光学的に観察可能である。例えば、図4は、観察装置16がワークWの表面の状態を光学的に撮像可能な例を示している。この場合、観察装置16は、光源161と、ビームスプリッタ162と、ノッチフィルタ163と、撮像素子164とを備えていてもよい。光源161は、照明光ILを生成する。照明光ILは、可視光であるが、不可視光であってもよい。但し、照明光ILの波長は、加工光ELの波長とは異なる。特に、照明光ILの波長は、ダイクロイックミラー13を通過可能な波長に設定される。光源161は、生成した照明光ILを、ビームスプリッタ162に向けて射出する。ビームスプリッタ162は、光源161からの照明光ILの少なくとも一部を、ノッチフィルタ163に向けて反射する。ノッチフィルタ163は、入射する照明光ILのうち一部の波長帯域の光のみを減衰させるフィルタである。尚、入射する照明光ILのうち一部の波長帯域の光のみを透過させるバンドパスフィルタを、ノッチフィルタ163に加えて又は代えて用いてもよい。このノッチフィルタ163は、ノッチフィルタ163を通過する照明光ILの波長帯域を、ダイクロイックミラー13を透過できる波長帯域に制限する。ビームスプリッタ162が反射した照明光ILは、ノッチフィルタ163を介してダイクロイックミラー13に入射する。ダイクロイックミラー13に入射した照明光ILは、ダイクロイックミラー13を通過する。その結果、照明光ILは、光学系14を介してワークWの表面に照射される。つまり、照明光ILは、加工光ELの光路と少なくとも部分的に重複する光路を介してワークWの表面に照射される。照明光ILは、光源11からの加工光ELをワークWに導く光学系の一部(図4に示す例では、ダイクロイックミラー13及び光学系14)を介してワークWの表面に照射される。従って、図4に示す例では、光源11からの加工光ELをワークWに導く光学系の一部が、光源161からの照明光ILをワークWに導く光学系の一部として共用されている。但し、光源11からの加工光ELをワークWに導く光学系と、光源161からの照明光ILをワークWに導く光学系とが、光学的に分離されていてもよい。ワークWの表面に照射された照明光ILの少なくとも一部は、ワークWの表面で反射される。その結果、ワークWによって反射した照明光ILは、反射光ILrとして光学系14に入射する。反射光ILrは、光学系14を介して観察装置16に入射する。観察装置16に入射した反射光ILrは、ノッチフィルタ163を介してビームスプリッタ162に入射する。尚、照明光ILと反射光ILrとを観察光と称してもよい。尚、ノッチフィルタ163は、観察光と波長が異なる加工光ELが観察装置16の内部(特に、撮像素子164)に入射することを防止するための遮光部材として用いられてもよい。ビームスプリッタ162に入射した反射光ILrの少なくとも一部は、ビームスプリッタ162を通過して撮像素子164に入射する。その結果、観察装置16は、ワークWの表面の状態を光学的に撮像することができる。
The
観察装置16の観察結果(具体的には、撮像結果)は、ワークWの状態を特定可能な情報を含んでいる。従って、観察装置16は、ワークWを計測するための計測装置として用いられてもよい。特に、観察装置16の観察結果(具体的には、撮像結果)は、ワークWの形状(例えば、ワークWの表面の形状)を特定可能な情報を含んでいる。従って、観察装置16は、ワークWの形状を計測するための計測装置として用いられてもよい。この場合、加工装置1の一部が、ワークWを計測するための計測装置(図4に示す例では、観察装置16)の少なくとも一部と共用されていると言える。
The observation results (specifically, the imaging results) of the
(1-3)ステージ装置3の構造
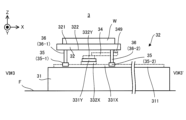
続いて、図6から図10を参照しながら、第1実施形態のステージ装置3の構造について説明する。図6は、第1実施形態のステージ装置3を示す上面図である。図7は、図6に示すステージ装置3のVI#1-VI#1’断面図である。図8は、図6に示すステージ装置3のVI#2-VI#2’断面図である。図9は、図6に示すステージ装置3のVI#3-VI#3’断面図である。図10は、図6に示すステージ装置3のVI#4-VI#4’断面図である。 (1-3) Structure of
図6から図10に示すように、ステージ装置3は、上述した定盤31及びステージ32に加えて、ステージ駆動系33と、連結部材34と、エアベアリング35とを備えている。
As shown in FIGS. 6 to 10, the
ステージ駆動系33は、ステージ32をX軸方向及びY軸方向のそれぞれに沿って移動させるための装置である。この場合、ステージ駆動系33は、ステージ32のZ軸方向の位置を制御しなくてもよい。ステージ駆動系33は、主としてステージ32をX軸方向に沿って移動させるためのXステージ駆動系33Xと、主としてステージ32をY軸方向に沿って移動させるためのYステージ駆動系33Yとを備える。Xステージ駆動系33X及びYステージ駆動系33Yは、定盤31とステージ32との間に配置される。具体的には、Xステージ駆動系33X及びYステージ駆動系33Yは、定盤31の上面311とステージ32の下面322との間に配置される。
The
Xステージ駆動系33Xは、Xレール部材(Xガイド部材)331Xと、Xスライド部材332Xとを備える。Xレール部材331Xは、定盤31上に配置される。Xレール部材331Xは、X軸方向に沿って延びる部材である。Xレール部材331Xは、X軸方向に長手方向を有する部材である。Xスライド部材332Xは、Xレール部材331Xに取り付けられている。Xスライド部材332Xは、Xレール部材331Xに沿って移動可能な移動部材である。つまり、Xスライド部材332Xは、Xスライド部材332XがXレール部材331Xに沿って移動可能となるように、Xレール部材331Xに取り付けられている。この場合、Xスライド部材332Xは、Xブロック部材と称してもよい。Xレール部材331XがX軸方向に沿って延びる部材であるため、Xスライド部材332Xは、X軸方向に沿って移動可能である。Xスライド部材332Xは、Xステージ駆動系33Xが備える不図示のモータ(例えば、リニアモータ)の動力を用いて移動可能である。つまり、Xステージ駆動系33Xは、いわゆる直動ガイドを含む駆動系である。尚、Xステージ駆動系33Xは、移動装置と称されてもよい。
The X
Yステージ駆動系33Yは、Xステージ駆動系33X上に位置する。具体的には、Yステージ駆動系33Yは、Yレール部材(Yガイド部材)331Yと、Yスライド部材332Yとを備える。Yレール部材331Yは、Xスライド部材332X上に配置される。Yレール部材331Yは、Xスライド部材332Xと連結される。Yレール部材331Yは、Y軸方向に沿って延びる部材である。Yレール部材331Yは、Y軸方向に長手方向を有する部材である。Yスライド部材332Yは、Yレール部材331Yに取り付けられている。Yスライド部材332Yは、Yレール部材331Yに沿って移動可能な移動部材である。つまり、Yスライド部材332Yは、Yスライド部材332YがYレール部材331Yに沿って移動可能となるように、Yレール部材331Yに取り付けられている。この場合、Yスライド部材332Yは、Yブロック部材と称してもよい。Yレール部材331YがY軸方向に沿って延びる部材であるため、Yスライド部材332Yは、Y軸方向に沿って移動可能である。Yレール部材は、Yステージ駆動系33Yが備える不図示のモータ(例えば、リニアモータ)の動力を用いて移動可能である。つまり、Yステージ駆動系33Yは、いわゆる直動ガイドを含む駆動系である。尚、Yステージ駆動系33Yは、移動装置と称されてもよい。
Y
Yレール部材331YがXスライド部材332X上に配置されているため、Xスライド部材332XのX軸方向の移動に伴って、Yレール部材331Yもまた、X軸方向に沿って移動可能である。Yレール部材331YがX軸方向に沿って移動すると、Yレール部材331Yに取り付けられているYスライド部材332Yもまた、X軸方向に沿って移動する。このため、Yスライド部材332Yは、X軸方向及びY軸方向のそれぞれに沿って移動可能な移動部材である。
Since the
連結部材34は、Yスライド部材332Yからステージ32に向かって延びる(つまり、延在する)部材である。連結部材34は、Yスライド部材332Yと連結部材34とが連結される位置から、ステージ32と連結部材34とが連結される位置に向かって延びる部材である。連結部材34は、Yスライド部材332Yのうちの連結部材34と連結される連結部分3321Y(図7)から、ステージ32のうちの連結部材34と連結される連結部分323(図7)に向かって延びる部材である。
The connecting
連結部材34は、Yスライド部材332Yとステージ32とを連結する。具体的には、連結部材34は、連結部材34のうちの連結部分341(図7)を介してYスライド部材332Y(特に、その連結部分3321Y)に連結される。図6から図10に示す例では、連結部材34の連結部分341は、Yスライド部材332Yの上面(つまり、+Z側を向いた面)に連結されているが、Yスライド部材332Yの任意の部分に連結されてもよい。連結部材34は、連結部材34の連結部分342(図7)を介してステージ32(特に、その連結部分323)に連結される。図6から図10に示す例では、連結部材34の連結部分342は、ステージ32の下面322に連結されているが、ステージ32の任意の部分に連結されてもよい。
The connecting
第1実施形態では、連結部材34は、ステージ32の下方の空間(一例として、ステージ32の下面322と定盤31の上面311との間の空間)の少なくとも一部を介して、Yスライド部材332Yとステージ32とを連結する。連結部材34は、ステージ32の下方の空間においてYスライド部材332Yからステージ32に向かって延びる。連結部材34は、ステージ32の下方の空間に配置される。連結部材34は、ステージ32の下面322と定盤31の上面311との間に配置される。この場合、連結部材34のうちの連結部分342以外の部分がステージ32(特に、下面322)と接触しないように、連結部分342は、スペーサ349を介してステージ32に連結されている。スペーサ349は、Z軸方向において連結部材34とステージ32との間に所定の間隙を形成可能なサイズを有している。但し、連結部分342は、スペーサ349を介することなくステージ32に連結されていてもよい。尚、連結部分342又はスペーサ349は、ステージ32の周辺部でステージ32と連結されているが、他の場所で連結されていてもよい。例えば、ステージ32の中心位置近傍或いは重心位置近傍で連結されていてもよい。ここで、ステージ32の中心位置(重心位置)近傍は、ステージ32の中心(重心)とステージ32の端部とを結ぶ線分の1/2の位置よりも中心(重心)側の位置とすることができる。
In the first embodiment, the connecting
ステージ32の下方の空間の少なくとも一部において連結部材34がYスライド部材332Yとステージ32とを連結する場合、Yスライド部材332Yの少なくとも一部とステージ32の少なくとも一部とは、Z軸方向に沿って隣接していてもよい。Yスライド部材332Yの少なくとも一部とステージ32の少なくとも一部とは、Z軸方向に沿って重複していてもよい。Yスライド部材332Yの少なくとも一部とステージ32の少なくとも一部とは、Z軸方向に沿って対向していてもよい。Yスライド部材332YのZ軸方向における位置は、ステージ32のZ軸方向における位置とは異なっていてもよい。Yスライド部材332Yの少なくとも一部のXY平面に沿った方向における位置は、ステージ32の少なくとも一部のXY平面に沿った方向における位置と同じになっていてもよい。より具体的には、Yスライド部材332Yの少なくとも一部は、ステージ32の少なくとも一部の下方の空間に配置されていてもよい。ステージ32の少なくとも一部は、Yスライド部材332Yの少なくとも一部の上方の空間に配置されていてもよい。
When the connecting
Yスライド部材332Yとステージ32とが連結部材34によって連結されているため、Yスライド部材332YがX軸方向に沿って移動すると、Yスライド部材332Yに対して連結部材34を介して連結されたステージ32もまた、X軸方向に沿って移動する。Yスライド部材332YがY軸方向に沿って移動すると、Yスライド部材332Yに対して連結部材34を介して連結されたステージ32もまた、Y軸方向に沿って移動する。つまり、ステージ32は、Yスライド部材332Yの移動に伴ってX軸方向及びY軸方向のそれぞれに沿って移動可能となる。つまり、ステージ32は、XY平面に沿ったステージ走り面内で移動可能となる。
Since the
但し、Yスライド部材332Yとステージ32とを連結する連結部材34のX軸方向における剛性が低すぎると、連結部材34がX軸方向における変位を吸収するばねとして機能してしまいかねない。その結果、Yスライド部材332YがX軸方向に沿った移動した場合であっても、ステージ32がX軸方向に沿って移動しない可能性がある。或いは、ステージ32のX軸方向に沿った移動量が、Yスライド部材332YのX軸方向に沿った移動量から想定される移動量よりも少なくなってしまう可能性がある。このため、連結部材34のX軸方向における剛性は、Yスライド部材332YのX軸方向に沿った移動に伴って、Yスライド部材332YのX軸方向における移動態様から想定される移動態様でステージ32がX軸方向に沿って移動するという移動条件#Xを満たすことが可能な程度に高い値に設定されていてもよい。移動態様は、移動の向きを含んでいてもよい。つまり、移動条件#Xは、Yスライド部材332Y及びステージ32のX軸方向における移動の向きに関する条件を含んでいてもよい。例えば、移動条件#Xは、ステージ32のX軸方向における移動の向きが、Yスライド部材332YのX軸方向における移動の向きと同じになるという移動条件#X1を含んでいてもよい。より具体的には、移動条件#Xは、Yスライド部材332Yが+X側に向かって移動した場合に、ステージ32が+X側に向かって移動するという移動条件#X11、及び、Yスライド部材332Yが-X側に向かって移動した場合に、ステージ32が-X側に向かって移動するという移動条件#X12の少なくとも一つを含んでいてもよい。移動態様は、移動の向きに加えて又は代えて、移動量を含んでいてもよい。つまり、移動条件#Xは、Yスライド部材332Y及びステージ32のX軸方向における移動量に関する条件を含んでいてもよい。例えば、移動条件#Xは、ステージ32のX軸方向に沿った移動量が、Yスライド部材332YのX軸方向に沿った移動量に比例するという移動条件#X2を含んでいてもよい。移動態様は、移動の向き及び移動量の少なくとも一方に加えて又は代えて、移動速度(つまり、単位時間当たりの移動量)を含んでいてもよい。つまり、移動条件#Xは、Yスライド部材332Y及びステージ32のX軸方向における移動速度に関する条件を含んでいてもよい。例えば、移動条件#Xは、ステージ32のX軸方向に沿った移動速度が、Yスライド部材332YのX軸方向に沿った移動速度に比例するという移動条件#X3を含んでいてもよい。
However, if the rigidity of the connecting
同様に、Yスライド部材332Yとステージ32とを連結する連結部材34のY軸方向における剛性が低すぎると、連結部材34がY軸方向における変位を吸収するばねとして機能してしまいかねない。その結果、Yスライド部材332YがY軸方向に沿って移動した場合であっても、ステージ32がY軸方向に沿って移動しない可能性がある。或いは、ステージ32のY軸方向に沿った移動量が、Yスライド部材332YのY軸方向に沿った移動量から想定される移動量よりも少なくなってしまう可能性がある。このため、連結部材34のY軸方向における剛性は、Yスライド部材332YのY軸方向に沿った移動に伴って、Yスライド部材332YのY軸方向における移動態様から想定される移動態様でステージ32がY軸方向に沿って移動するという移動条件#Yを満たすことが可能な程度に高い値に設定されていてもよい。移動態様は、上述したように、移動の向き、移動量及び移動速度の少なくとも一つを含んでいてもよい。つまり、移動条件#Yは、Yスライド部材332Y及びステージ32のY軸方向における移動の向きに関する条件、Yスライド部材332Y及びステージ32のY軸方向における移動量に関する条件、及び、Yスライド部材332Y及びステージ32のY軸方向における移動速度に関する条件の少なくともひとつを含んでいてもよい。例えば、移動条件#Yは、ステージ32のY軸方向における移動の向きが、Yスライド部材332YのY軸方向における移動の向きと同じになるという移動条件#Y1を含んでいてもよい。より具体的には、移動条件#Yは、Yスライド部材332Yが+Y側に向かって移動した場合に、ステージ32が+Y側に向かって移動するという移動条件#Y11、及び、Yスライド部材332Yが-Y側に向かって移動した場合に、ステージ32が-Y側に向かって移動するという移動条件#Y12の少なくとも一つを含んでいてもよい。例えば、移動条件#Yは、ステージ32のY軸方向に沿った移動量が、Yスライド部材332YのY軸方向に沿った移動量に比例するという移動条件#Y2を含んでいてもよい。例えば、移動条件#Yは、ステージ32のY軸方向に沿った移動速度が、Yスライド部材332YのY軸方向に沿った移動速度に比例するという移動条件#Y3を含んでいてもよい。
Similarly, if the rigidity of the connecting
一方で、Yスライド部材332Yとステージ32とを連結する連結部材34のZ軸方向における剛性が高すぎると、Yスライド部材332YのZ軸方向に沿った変位が、連結部材34を介してステージ32に伝達されてしまう。このようなステージ32のZ軸方向に沿った変位は、ステージ32に載置されたワークWの加工精度の悪化につながりかねない。このため、連結部材34のZ軸方向における剛性は、Yスライド部材332YのZ軸方向に沿った変位を吸収するようにZ軸方向において変形する(例えば、歪む、たわむ、又は、曲がる)という変位吸収条件を満たすことが可能な程度に低い値に設定されていてもよい。この場合、連結部材34は、典型的には、Z軸方向において変位する。特に、連結部材34は、ステージ32がステージ走り面に沿って移動するときにZ軸方向において変位する。その結果、ステージ32は、Yスライド部材332YのZ軸方向に沿った変位による影響を受けることなく、ステージ走り面に沿って適切に移動可能となる。尚、第1実施形態における「Yスライド部材332Yの変位の吸収」は、Yスライド部材332Yの変位がステージ32に伝達しなくなるように、Yスライド部材332Yの変位を連結部材34で打ち消すことのみならず、Yスライド部材332Yからステージ32に伝達された変位がワークWの加工精度に殆ど影響を与えないほどに小さくなるように、Yスライド部材332Yの変位を連結部材34で低減することも含む。
On the other hand, if the rigidity in the Z-axis direction of the connecting
連結部材34は、典型的には、X軸方向及びY軸方向のそれぞれにおける剛性が、Z軸方向における剛性よりも高い部材となる。連結部材34は、典型的には、Z軸方向における剛性が、X軸方向及びY軸方向のそれぞれにおける剛性よりも低い部材となる。言い換えると、連結部材34は、ある方向における剛性が別の方向における剛性よりも高くなるフレクシャな部材であってもよい。この場合、X軸方向及びY軸方向のそれぞれにおける剛性が、Z軸方向における剛性よりも高くない比較例の連結部材と比較して、連結部材34の剛性は、上述した移動条件#X、移動条件#Y及び変位吸収条件を満たしやすくなる。
The connecting
連結部材34は、例えば、X軸方向又はY軸方向(或いは、XY平面に沿った任意の方向)に沿って延びる部材であってもよい。連結部材34は、長手形状を有する部材であってもよい。連結部材34は、Z軸方向の厚みに対してX軸方向及びY軸方向の少なくとも一方の長さが十分に大きい部材であってもよい。連結部材34は、厚みに対する長さの比であるアスペクト比が相対的に高い部材であってもよい。図6から図10に示す例では、連結部材34は、X軸方向に沿って延びる部材(つまり、X軸方向が長手方向となる部材)である。この場合、連結部材34の剛性は、上述した移動条件#X、移動条件#Y及び変位吸収条件を満たしやすくなる。
The connecting
連結部材34がX軸方向又はY軸方向(或いは、XY平面に沿った任意の方向)に沿って延びる部材である場合には、連結部材34の連結部分341及び342は、それぞれ、連結部材34の一方の端部及び他方の端部であってもよい。この場合、連結部分341が連結されるYスライド部材332Yの連結部分3321Yと、連結部分342が連結されるステージ32の連結部分323とは、連結部材34が延びる方向に沿って離れる。つまり、連結部材34は、Yスライド部材332Yの連結部分3321Yと、X軸方向又はY軸方向(或いは、XY平面に沿った任意の方向)に沿った位置が連結部分3321Yとは異なるステージ32の連結部分323とを連結する。
When the connecting
連結部材34は、弾性体を含んでいてもよい。連結部材34は、弾性体である弾性部材を含んでいてもよい。例えば、連結部材34は、弾性体の一例であるバネを含んでいてもよい。バネの一例として、線バネ(言い換えれば、コイルバネ)、板バネ、棒バネ(言い換えれば、トーションバー)及び渦巻きバネの少なくとも一つがあげられる。連結部材34が板バネを含む場合には、当該板バネは、XY平面又はXY平面と平行な面に沿った板状の形状を有していてもよい。板バネは、ステージ走り面又はステージ走り面と平行な面に沿った板状の形状を有していてもよい。或いは、例えば、連結部材34は、バネに加えて又は代えて、弾性体の他の一例であるゴムを含んでいてもよい。このように連結部材34が弾性体を含んでいる場合、連結部材34が弾性体を含んでいない場合と比較して、連結部材34の剛性が特に変位吸収条件を満たしやすくなる。尚、弾性体を含む連結部材34は、弾性部材と称されてもよい。
The connecting
但し、上述したように、連結部材34がX軸方向又はY軸方向(或いは、XY平面に沿った任意の方向)に沿って延びる部材であれば、連結部材34の剛性が移動条件#X、移動条件#Y及び変位吸収条件を満たしやすくなる。このため、連結部材34がバネを含む場合には、連結部材34が含むバネは、X軸方向又はY軸方向(或いは、XY平面に沿った任意の方向)に沿って延びる形状を有するバネであってもよい。このようなバネの一例として、板状の形状を有するバネ(いわゆる、板バネ)があげられる。
However, as described above, if the connecting
エアベアリング35は、ステージ32を支持する部材である。具体的には、エアベアリング35は、Z軸方向においてステージ32を支持する。エアベアリング35は、定盤31(例えば、定盤31の上面311)とステージ32との間のZ軸方向における相対位置を維持するように、Z軸方向においてステージ32を支持する。エアベアリング35は、定盤31(例えば、定盤31の上面311)とステージ32との間のZ軸方向における位置関係が所望の位置関係となるように、Z軸方向においてステージ32を支持する。エアベアリング35は、定盤31に対してステージ32が意図せずZ軸方向に沿って移動しないように(つまり、Z軸方向におけるステージ32の位置ずれが生じないように)、Z軸方向においてステージ32を支持する。
The
第1実施形態では、ステージ装置3は、複数のエアベアリング35を備えている。図6から図10に示す例では、ステージ装置3は、3つのエアベアリング35(具体的には、エアベアリング35-1から35-3)を備えている。但し、ステージ装置3は、単一のエアベアリング35を備えていてもよいし、2つのエアベアリング35を備えていてもよいし、4つ以上のエアベアリング35を備えていてもよい。
In the first embodiment, the
エアベアリング35は、ステージ32に配置されている。典型的には、エアベアリング35は、ステージ32に固定されている。特に、エアベアリング35は、ステージ32の下面322に配置されている。具体的には、エアベアリング35は、取付部材36を介してステージ32に設けられている。但し、エアベアリング35は、取付部材36を介することなく、ステージ32に直接的に設けられていてもよい。図6から図10に示す例では、エアベアリング35-1は、取付部材36-1を介してステージ32に取り付けられており、エアベアリング35-2は、脚部材36-2を介してステージ32に取り付けられており、エアベアリング35-3は、取付部材36-3を介してステージ32に取り付けられている。尚、エアベアリング35は取付部材36に固定されていて3もよいし、単にはめ込まれていてもよい。
取付部材36は、ステージ32の下面322からステージ32の下方に配置されるエアベアリング35に向かって延びる部材である。但し、取付部材36は、エアベアリング35をステージ32に取り付けられる限りは、どのような構造を有していてもよい。尚、図6から図10に示す例では、エアベアリング35-3とステージ32との間に他の部材(具体的には、図10に示すように、Yレール部材331Y)が配置されている。言い換えれば、エアベアリング35-3は、Yレール部材331YとZ軸方向において重なる位置に配置されている。このため、エアベアリング35-3をステージ32に取り付けるための取付部材36-3は、エアベアリング35-3とステージ32との間に配置されている他の部材(具体的には、図10に示すように、Yレール部材331Y)を避けながら、ステージ32の下面322からエアベアリング35-3に向かって延びる形状を有している。図10に示す例では、取付部材36-3は、ステージ32の下面322からYレール部材331Yの左右一方側を通過して下方に延びる部材と、ステージ32の下面322からYレール部材331Yの左右他方側を通過して下方に延びる部材と、これら2つの部材を連結すると共にエアベアリング35が配置される部材とを含んでいる。
The mounting
エアベアリング35は、定盤31(特に、その上面311)に対向するように配置される。エアベアリング35は、定盤31に対して非接触な状態でステージ32を支持する。具体的には、エアベアリング35は、エアベアリング35の気体噴出口から気体を噴出することで、定盤31(特に、その上面311)との間に薄い気体膜を形成する。形成された気体膜は、ガスベアリングとして機能可能である。その結果、エアベアリング35は、定盤31に対して浮上した状態になる。このため、エアベアリング35が配置されているステージ32もまた、定盤31に対して浮上した状態になる。つまり、エアベアリング35は、ステージ32を定盤31(特に、その上面311)上に浮上させる浮上部材として機能可能である。尚、エアベアリング35の気体噴出口から噴出される気体は、空気であってもよいし、CDA(クリーン・ドライ・エア)であってもよいし、別の種類の気体であってもよい。例えば、筐体4の内部が窒素ガス等の不活性ガスで満たされる場合には、エアベアリング35の気体噴出口から窒素ガス等の不活性ガスを噴出してもよい。つまり、エアベアリング35が設けられる周囲の雰囲気と同じ種類のガスを、エアベアリング35の気体噴出口から噴出してもよい。
The
ステージ32は、エアベアリング35によって支持された状態で、Xスライド部材332X及びYスライド部材332Yの移動に伴ってX軸方向及びY軸方向のそれぞれに沿って移動する。この際、エアベアリング35がステージ32に配置されているため、エアベアリング35もまた、ステージ32の移動に伴ってX軸方向及びY軸方向のそれぞれに沿って移動する。つまり、エアベアリング35は、定盤31に対向し且つ定盤31との間に気体膜を形成した状態で、X軸方向及びY軸方向のそれぞれに沿って移動する。
The
但し、上述したように、エアベアリング35が対向する定盤31には、Xレール部材331Xが配置されている。この場合、Xレール部材331Xがエアベアリング35の移動にとって障害になる可能性がある。具体的には、図6に示すように、Yスライド部材332Yの移動に伴ってステージ32(更には、エアベアリング35)がY軸方向に沿って移動すると、エアベアリング35がXレール部材331Xに接触する可能性がある。そこで、エアベアリング35は、ステージ32が移動した場合であってもXレール部材331Xに接触することがない適切な位置に配置される。具体的には、エアベアリング35は、ステージ32が+Y側に最大限移動した場合であってもXレール部材331Xに接触することがなく、且つ、ステージ32が-Y側に最大限移動した場合であってもXレール部材331Xに接触することがない適切な位置に配置される。より具体的には、エアベアリング35は、ステージ32が+Y側に最大限移動した場合であってもZ軸方向においてXレール部材331Xの少なくとも一部を重なることがなく、且つ、ステージ32が-Y側に最大限移動した場合であってもZ軸方向においてXレール部材331Xの少なくとも一部と重なることがない適切な位置に配置される。図6に示す例では、3つのエアベアリング35-1から35-3は、Y軸方向に沿ってエアベアリング35-1及び35-2とエアベアリング35-3とがXレール部材331Xを間に挟み込むように配置されている。
However, as described above, the
更に、図6に示す例では、3つのエアベアリング35-1から35-3は、Y軸方向に沿ってエアベアリング35-1とエアベアリング35-2とがYレール部材331Yを間に挟み込むように配置されている。このように少なくとも二つのエアベアリング35がYレール部材331Yを間に挟み込み且つ少なくとも二つのエアベアリング35がXレール部材331Xを間に挟み込むように複数のエアベアリング35が配置される場合、複数のエアベアリング35の全てが直線状に並ぶことはない。その結果、ステージ32が三点以上で支持されるがゆえに、3つのエアベアリング35-1から35-3が支持するステージ32の安定性が向上する。
Furthermore, in the example shown in FIG. 6, the three air bearings 35-1 to 35-3 are arranged such that the air bearing 35-1 and the air bearing 35-2 sandwich the
ステージ32が移動すると、ステージ32(更には、ステージ32に載置されたワークW)と加工装置1と計測装置2との位置関係が変わる。つまり、ステージ32が移動すると、加工装置1及び計測装置2に対するステージ32(更には、ステージ32に載置されたワークW)の位置が変わる。従って、ステージ32を移動させることは、ステージ32(更には、ステージ32に載置されたワークW)と加工装置1と計測装置2との位置関係を変更することと等価であるとみなしてもよい。
When the
ステージ32は、加工装置1がワークWを加工する加工期間の少なくとも一部において加工ショット領域PSA内にワークWの少なくとも一部が位置するように、移動してもよい。ステージ32は、加工期間の少なくとも一部においてワークW上に加工ショット領域PSAが位置するように、移動してもよい。加工ショット領域PSA内にワークWの少なくとも一部が位置する(つまり、ワークW上に加工ショット領域PSAが位置する)場合には、加工装置1は、加工ショット領域PSA内に位置するワークWの少なくとも一部に加工光ELを照射することができる。その結果、ワークWの少なくとも一部は、ステージ32上に載置された状態(或いは、ステージ32に保持された状態)で、加工装置1が照射する加工光ELによって加工される。尚、ワークWの全体が加工ショット領域PSA内に位置することができない程度にワークWが大きい場合には、ワークWの複数個所(例えば、XY平面に沿った面内における複数個所)で加工装置1による加工が順に行われてもよい。具体的には、まず、ステージ駆動系33により、ワークWのうちの第1部分が加工ショット領域PSAに含まれるように、ステージ32がステージ走り面に沿って移動する(更には、必要に応じて、後述する駆動系5によって加工装置1が移動してもよい、以下この段落において同じ)。その後、ステージ32が静止した状態で、加工装置1は、第1部分を含む加工ショット領域PSA内を照射領域EAが移動するように加工光ELを照射することで、第1部分を加工する。その後、ステージ駆動系33により、ワークWのうちの第1部分とは異なる第2部分が加工ショット領域PSAに含まれるように、ステージ32がステージ走り面に沿って移動する。その後、ステージ32が静止した状態で、加工装置1は、第2部分を含む加工ショット領域PSA内を照射領域EAが移動するように加工光ELを照射することで、第2部分を加工する。以降、ワークWの加工が完了するまで同様の動作が繰り返されてもよい。
The
ステージ32は、計測装置2がワークWを計測する計測期間の少なくとも一部において計測ショット領域MSA内にワークWの少なくとも一部が位置するように、移動してもよい。ステージ32は、計測期間の少なくとも一部においてワークW上に計測ショット領域MSAが位置するように、移動してもよい。計測ショット領域MSA内にワークWの少なくとも一部が位置する(つまり、ワークW上に計測ショット領域MSAが位置する)場合には、計測装置2は、計測ショット領域MSA内に位置するワークWの少なくとも一部を計測することができる。つまり、ワークWの少なくとも一部は、ステージ32上に載置された状態(或いは、ステージ32に保持された状態)で、計測装置2によって計測される。尚、ワークWの全体が計測ショット領域MSA内に位置することができない程度にワークWが大きい場合には、ワークWの複数個所(例えば、XY平面に沿った面内における複数個所)で計測装置2による計測が順に行われてもよい。具体的には、まず、ステージ駆動系33により、ワークWのうちの第1部分が計測ショット領域MSAに含まれるように、ステージ32がステージ走り面に沿って移動する(更には、必要に応じて、後述する駆動系6によって計測装置2が移動してもよい、以下この段落において同じ)。その後、ステージ32が静止した状態で、計測装置2は、第1部分を含む計測ショット領域MSAを計測することで、第1部分を計測する。その後、ステージ駆動系33により、ワークWのうちの第1部分とは異なる第2部分が計測ショット領域MSAに含まれるように、ステージ32がステージ走り面に沿って移動する。その後、ステージ32が静止した状態で、計測装置2は、第2部分を含む計測ショット領域MSAを計測することで、第2部分を計測する。以降、ワークWの計測が完了するまで同様の動作が繰り返されてもよい。尚、光切断法を用いる計測装置2では、計測ショット領域MSAは典型的には所定方向に伸びたスリット形状であるため、当該スリットの長手方向と交差する方向に沿ってワークWをステージ32によって移動させつつワークWの計測が行われてもよい。
The
ステージ32は、ステージ32上にワークWが載置された状態で、加工ショット領域PSAと計測ショット領域MSAとの間で移動してもよい。ステージ32は、ステージ32上にワークWが載置された状態で、ワークWが加工ショット領域PSAと計測ショット領域MSAとの間で移動するように移動してもよい。つまり、ワークWは、加工装置1がワークWを加工する加工期間及び計測装置2がワークWを計測する計測期間に加えて、ワークWが加工ショット領域PSAと計測ショット領域MSAとの間を移動する移動期間中もまた、ステージ32に載置されたままであってもよい。ワークWは、加工装置1によるワークWの加工と計測装置2によるワークWの計測との間で、ステージ32に載置されたままであってもよい。ワークWは、加工装置1によるワークWの加工から計測装置2によるワークWの計測までの間で、ステージ32に載置されたままであってもよい。ワークWは、計測装置2によるワークWの計測から加工装置1によるワークWの加工までの間で、ステージ32に載置されたままであってもよい。言い換えれば、加工装置1によるワークWの加工が完了してから計測装置2によるワークWの計測が開始されるまでの間に又は計測装置2によるワークWの計測が完了してから加工装置1によるワークWの加工が開始されるまでの間に、ステージ32からワークWが取り外されなくてもよい。
The
尚、ステージ32は、加工装置1によるワークWの加工が完了した後に、加工ショット領域PSAから計測ショット領域MSAへと移動してもよい。この場合、計測装置2は、加工装置1がワークWを加工した後に、ワークWを計測してもよい。加工装置1は、計測装置2がワークWを計測する前に、ワークWを加工してもよい。計測装置2の計測結果は、加工装置1によるワークWの加工品質を評価するために用いられてもよい。
Note that the
また、ステージ32は、計測装置2がワークWの計測を完了した後に、計測ショット領域MSAから加工ショット領域PSAへと移動してもよい。この場合、計測装置2は、加工装置1がワークWを加工する前に、ワークWを計測してもよい。加工装置1は、計測装置2がワークWを計測した後に、ワークWを加工してもよい。計測装置2の計測結果は、加工装置1によるワークWの加工動作を制御するために用いられてもよい。
Further, the
ステージ32がワークWを保持している場合は、加工期間の少なくとも一部においてステージ32がワークWを保持する保持態様と、計測期間の少なくとも一部においてステージ32がワークWを保持する保持態様とが同じであってもよい。保持態様の一例として、ステージ32がワークWを保持する力があげられる。但し、加工期間の少なくとも一部においてステージ32がワークWを保持する保持態様と、計測期間の少なくとも一部においてステージ32がワークWを保持する保持態様とが異なっていてもよい。また、ステージ32がワークWを保持することに加えて又は代えて、ワークWに重り(ウエイト)を載せてもよい。特に、ワークWが軽量である場合及び/又は小型である場合には、重りが有効である。
When the
ステージ32が移動する場合には、ステージ装置3は、ステージ32の位置を計測するため位置計測器39(図1参照)を備えていてもよい。位置計測器39は、例えば、エンコーダ及びレーザ干渉計のうちの少なくとも一方を含んでいてもよい。
When the
(1-4)技術的効果
以上説明したように、第1実施形態の加工システムSYSaは、加工装置1と計測装置2との双方を備えている。特に、加工システムSYSaは、加工装置1と計測装置2とを、ステージ装置3が収容される(つまり、ワークWが収容される)筐体4内に備えている。このため、加工装置1がワークWを加工してから加工されたワークWを計測装置2が計測するまでの間に、ステージ32からワークWを取り外さなくてもよい。同様に、計測装置2がワークWを計測してから計測されたワークWを加工装置1が加工するまでの間に、ステージ32からワークWを取り外さなくてもよい。このため、加工装置1がワークWを加工してから加工されたワークWを計測装置2が計測するまでの間に及び/又は計測装置2がワークWを計測してから計測されたワークWを加工装置1が加工するまでの間にステージ32からワークWを取り外す必要がある場合と比較して、ワークWのステージ32からの取り外し及びワークWのステージ32への再載置が不要な分だけワークWの加工に関するスループットが向上する。更には、ワークWのステージ32への再載置に伴って必要になりかねないアライメント動作(例えば、ステージ32に対するワークWの位置合わせ動作)を行わなくてもよいがゆえに、その分もワークWの加工に関するスループットが向上する。更には、ワークWの載置や取り外しに起因する加工誤差や計測誤差の影響が低減可能となる。 (1-4) Technical Effects As explained above, the processing system SYSa of the first embodiment includes both the
また、加工システムSYSaが加工装置1と計測装置2との双方を備えているがゆえに、加工システムSYSaは、加工装置1が加工したワークWの状態を計測装置2で計測しながら、ワークWを加工することができる。その結果、加工システムSYSaは、ワークWの状態が所望の状態から乖離している(例えば、ワークWの加工量が適切でない及び/又はワークWの加工位置が適切でない)場合には、ワークWの状態が所望の状態に近づくように又は一致するように、加工装置1を即座に制御することができる。例えば、加工システムSYSaは、ワークWの加工量が適切でない及び/又はワークWの加工位置が適切でない場合には、ワークWの加工量が適切になるように及び/又はワークWの加工位置が適切になるように、加工装置1を即座に制御することができる。このため、加工装置1が加工したワークWの状態を計測装置2で計測することなくワークWを加工する場合と比較して、加工システムSYSaは、ワークWをより高精度に加工することができる。
In addition, since the processing system SYSa includes both the
また、加工装置1が加工光ELを用いてワークWを加工するがゆえに、ワークWが切削部材等を用いて加工される場合と比較して、ワークWの切削くずが発生しにくい。このため、加工装置1と計測装置2とを同じ筐体4内に配置したとしても、切削くずによって計測装置2の適切な動作が妨げられることは殆どない。
Further, since the
また、加工装置1が加工光ELを用いてワークWを加工するがゆえに、ワークWが切削部材等を用いて加工される場合と比較して、ワークWに相対的に大きな外力が作用することはない。このため、ステージ32は、ワークWを相対的に大きな保持力で保持しなくてもよくなる。その結果、ステージ32には、加工装置1がワークWを加工する場合及び計測装置2がワークWを計測する場合の双方において実質的に同じ状態でワークWが載置可能となる。このため、計測装置2は、加工装置1がワークWを加工している場合と同様の状態でステージ32に載置されているワークWを計測することができる。つまり、計測装置2は、加工装置1がワークWを加工している場合に相対的に強い保持力でワークWがステージ32によって保持されている場合と比較して、相対的に強い力に起因して生じ得るワークWの微小な歪みの影響を受けることなく、ワークWを相対的に高精度に計測することができる。また、加工装置1は、ワークWの歪みの影響を低減した状態でワークWを高精度に加工することができる。
Furthermore, since the
また、第1実施形態では、ステージ32は、ステージ駆動系33(具体的には、Xステージ駆動系33X及びYステージ駆動系33Yであり、特に、Yスライド部材332Y)に対して連結部材34を介して連結されている。連結部材34の剛性が移動条件#Xを満たす場合には、ステージ32は、Yスライド部材332YのX軸方向に沿った移動に合わせて、X軸方向に沿って適切に移動可能となる。連結部材34の剛性が移動条件#Yを満たす場合には、ステージ32は、Yスライド部材332YのY軸方向に沿った移動に合わせて、Y軸方向に沿って適切に移動可能となる。このため、ステージ32は、制御装置7の制御下で、X軸方向及びY軸方向のそれぞれに沿って精度よく移動可能となる。このため、ステージ32とステージ駆動系33とが連結部材34を介して連結されている場合においても、ワークWの加工精度が悪化することはない。
Further, in the first embodiment, the
また、連結部材34の剛性が変位吸収条件を満たしている場合には、ステージ駆動系33のZ軸方向の変位(特に、Yスライド部材332YのZ軸方向の変位)が、連結部材34によって吸収される。つまり、ステージ駆動系33のZ軸方向の変位がステージ32に伝達しなくなるか、又は、ステージ駆動系33からステージ32に伝達された変位がワークWの加工精度に殆ど影響を与えないほどに小さくなる。このステージ駆動系33の変位の吸収について、図11及び図12を参照しながら説明する。図11は、Yスライド部材332Yが+Z側に変位する様子を示す断面図である。図12は、Yスライド部材332Yが-Z側に変位する様子を示す断面図である。
Further, when the rigidity of the connecting
図11に示すように、ステージ32がステージ走り面に沿って移動しているときにYスライド部材332Yが+Z側に変位すると、連結部材34のうちYスライド部材332Yに連結されている連結部分341もまた、+Z側に変位する。尚、ここで言う「Yスライド部材332Yの変位」とは、Yスライド部材332Yの基準位置に対してYスライド部材332Yの位置がずれている状態を意味する。この場合であっても、連結部材34の剛性が変位吸収条件を満たしている場合には、連結部分341を+Z側に変位させるようにYスライド部材332Yから連結部分341に伝達された力は、連結部材34のうちステージ32に連結されている連結部分342に対してそのまま伝達されることはない。つまり、変位吸収条件を満たす連結部材34は、連結部分341を+Z側に変位させるようにYスライド部材332Yから連結部分341に伝達された力が、連結部分342に対して伝達されることを抑制可能となる。その結果、連結部分342が連結部分341と同じように+Z側に変位することはない。具体的には、連結部分342は、+Z側に変位しない(つまり、Z軸方向に沿って移動しない)。或いは、連結部分342が+Z側に変位したとしても(つまり、Z軸方向に沿って移動したとしても)、その移動量は、連結部分341の移動量よりも小さくなる。典型的には、連結部分342は、ワークWの加工精度に殆ど影響を与えない程度しか+Z側に変位することはない。
As shown in FIG. 11, when the
同様に、図12に示すように、ステージ32がステージ走り面に沿って移動しているときにYスライド部材332Yが-Z側に変位すると、連結部分341もまた、-Z側に変位する。この場合であっても、連結部材34の剛性が変位吸収条件を満たしている場合には、連結部分341を-Z側に変位させるようにYスライド部材332Yから連結部分341に伝達された力は、連結部分342に対してそのまま伝達されることはない。つまり、変位吸収条件を満たす連結部材34は、連結部分341を-Z側に変位させるようにYスライド部材332Yから連結部分341に伝達された力が、連結部分342に対して伝達されることを抑制可能となる。その結果、連結部分342が連結部分341と同じように-Z側に変位することはない。具体的には、連結部分342は、-Z側に変位しない(つまり、Z軸方向に沿って移動しない)。或いは、連結部分342が-Z側に変位したとしても、その移動量は、連結部分341の移動量よりも小さくなる。典型的には、連結部分342は、ワークWの加工精度に殆ど影響を与えない程度しか-Z側に変位することはない。
Similarly, as shown in FIG. 12, when the
尚、連結部分342が連結部分341と同じようにZ軸方向において変位することはない状態は、実質的には、Z軸方向において連結部分342と連結部分341とが別々に移動可能な状態であるとも言える。
Note that the state in which the connecting
このように、第1実施形態では、ステージ駆動系33のZ軸方向の変位が、連結部材34によって吸収される。従って、ステージ駆動系33のZ軸方向の変位に起因して、ワークWの加工精度に影響を与えるほどにステージ32がZ軸方向に沿って意図せず移動することはない。このため、ステージ駆動系33のZ軸方向の変位が連結部材34によって吸収されない場合と比較して、ワークWの加工精度が向上する。
In this way, in the first embodiment, the displacement of the
また、ステージ駆動系33のZ軸方向の変位が連結部材34によって吸収されるほどに連結部材34のZ軸方向の剛性が低い場合であっても、ステージ32は、Z軸方向においてエアベアリング35によって支持されている。従って、ステージ32とステージ駆動系33とを連結する連結部材34のZ軸方向の剛性が相対的に低い場合であっても、エアベアリング35がステージ32を支持しているがゆえに、ワークWの加工精度に影響を与えるほどにステージ32がZ軸方向に沿って意図せず移動することはない。つまり、連結部材34とエアベアリング35(特に、エアベアリング35が形成する気体膜)とによって、ステージ32と定盤31との位置関係(例えば、ステージ32と定盤31の上面311との位置関係)が維持されるため、ワークWの加工精度が向上する。
Further, even if the rigidity of the connecting
第1実施形態では、ステージ32のZ軸方向における位置を定盤31(定盤31の上面311)基準で位置決めしており、ステージ駆動系33によってステージ32に与えられるZ変位に関する悪影響を連結部材34によって低減しているため、ワークWの加工精度、特にZ方向における加工精度が向上する。
In the first embodiment, the position of the
尚、ステージ32に与えられるZ変位に関する悪影響は、ステージ駆動系33起因のものでなくてもよい。また、ステージ32に与えられるZ変位に関する悪影響は、振動であってもよい。
It should be noted that the adverse effect regarding the Z displacement exerted on the
(2)第2実施形態の加工システムSYSb
続いて、第2実施形態の加工システムSYS(以降、第2実施形態の加工システムSYSを、“加工システムSYSb”と称する)について説明する。第2実施形態の加工システムSYSbは、上述した第1実施形態の加工システムSYSaと比較して、ステージ装置3に代えてステージ装置3bを備えているという点で異なる。加工システムSYSbのその他の特徴は、加工システムSYSaのその他の特徴と同一であってもよい。従って、以下では、図13を参照しながら、第2実施形態のステージ装置3bについて説明する。図13は、第2実施形態のステージ装置3bを示す上面図である。尚、以降の説明では、既に説明済みの構成要件については、同一の参照符号を付してその詳細な説明については省略する。 (2) Processing system SYSb of the second embodiment
Next, the processing system SYS of the second embodiment (hereinafter, the processing system SYS of the second embodiment will be referred to as the "processing system SYSb") will be described. The processing system SYSb of the second embodiment differs from the processing system SYSa of the first embodiment described above in that it includes a
図13に示すように、ステージ装置3bは、ステージ装置3と比較して、エアベアリング35-3とステージ32との間に他の部材(例えば、Yレール部材331Y)が配置されていないという点において異なる。つまり、第2実施形態では、ステージ装置3bは、エアベアリング35-3をステージ32に取り付けるための取付部材36-3が、エアベアリング35-3とステージ32との間に配置されている他の部材を避けながらステージ32の下面322からエアベアリング35-3に向かって延びる形状を有していなくてもよいという点で異なる。言い換えれば、第2実施形態では、全てのエアベアリング35が、Yレール部材331YとZ軸方向において重ならない位置に配置されている。ステージ装置3bのその他の特徴は、ステージ装置3のその他の特徴と同一であってもよい。
As shown in FIG. 13, the
このような第2実施形態の加工システムSYSbは、上述した第1実施形態の加工システムSYSaが享受可能な効果と同様の効果を享受することができる。 The processing system SYSb of the second embodiment can enjoy the same effects as the processing system SYSa of the first embodiment described above.
尚、図13に示す例では、ステージ装置3bは、取付部材36-4を介してステージ32に取り付けられるエアベアリング35-4を更に備えている。エアベアリング35-4は、主として、ステージ32を支持するための力のバランスをとる趣旨で配置されている。但し、ステージ装置3bは、エアベアリング35-4を備えていなくてもよい。
In the example shown in FIG. 13, the
(3)第3実施形態の加工システムSYSc
続いて、第3実施形態の加工システムSYS(以降、第3実施形態の加工システムSYSを、“加工システムSYSc”と称する)について説明する。第3実施形態の加工システムSYScは、上述した第1実施形態の加工システムSYSaと比較して、ステージ装置3に代えてステージ装置3cを備えているという点で異なる。加工システムSYScのその他の特徴は、加工システムSYSaのその他の特徴と同一であってもよい。従って、以下では、図14及び図15を参照しながら、第3実施形態のステージ装置3cについて説明する。図14は、第3実施形態のステージ装置3cを示す上面図である。図15は、第3実施形態のステージ装置3cを示す断面図である。 (3) Processing system SYSc of third embodiment
Next, the processing system SYS of the third embodiment (hereinafter, the processing system SYS of the third embodiment will be referred to as the "processing system SYSc") will be described. The processing system SYSc of the third embodiment differs from the processing system SYSa of the first embodiment described above in that it includes a
図14及び図15に示すように、ステージ装置3cは、複数の連結部材34を備えているという点において、複数の連結部材34を備えていなくてもよい(例えば、単一の連結部材34を備えている)ステージ装置3とは異なる。図14及び図15に示す例では、ステージ装置3cは、2つの連結部材34(具体的には、連結部材34-1及び34-2)を備えているが、3つ以上の連結部材34を備えていてもよい。ステージ装置3cのその他の特徴は、ステージ装置3のその他の特徴と同一であってもよい。
As shown in FIGS. 14 and 15, the
このような第3実施形態の加工システムSYScは、上述した第1実施形態の加工システムSYSaが享受可能な効果と同様の効果を享受することができる。 The processing system SYSc of the third embodiment can enjoy the same effects as the processing system SYSa of the first embodiment described above.
尚、第3実施形態においても、第2実施形態で説明した構成要件(例えば、エアベアリング35-3とステージ32との間に他の部材(例えば、Yレール部材331Y)が配置されていないという構成要件)が採用されてもよい。
Note that the third embodiment also has the structural requirements described in the second embodiment (for example, that no other member (for example, the
(4)第4実施形態の加工システムSYSd
続いて、第4実施形態の加工システムSYS(以降、第4実施形態の加工システムSYSを、“加工システムSYSd”と称する)について説明する。第4実施形態の加工システムSYSdは、上述した第1実施形態の加工システムSYSaと比較して、ステージ装置3に代えてステージ装置3dを備えているという点で異なる。加工システムSYSdのその他の特徴は、加工システムSYSaのその他の特徴と同一であってもよい。従って、以下では、図16を参照しながら、第4実施形態のステージ装置3dについて説明する。図16は、第4実施形態のステージ装置3dを示す上面図である。 (4) Processing system SYSd of the fourth embodiment
Next, the processing system SYS of the fourth embodiment (hereinafter, the processing system SYS of the fourth embodiment will be referred to as the "processing system SYSd") will be described. The processing system SYSd of the fourth embodiment differs from the processing system SYSa of the first embodiment described above in that it includes a
図16に示すように、ステージ装置3dは、上述したステージ装置3と比較して、連結部材34に代えて、連結部材34dを備えているという点で異なる。ステージ装置3dのその他の特徴は、ステージ装置3のその他の特徴と同一であってもよい。連結部材34dは、連結部材34と比較して、X軸方向及びY軸方向の双方に沿って広がる(つまり、XY平面に沿って広がる)部材であるという点で異なる。連結部材34dは、厚みに対するX軸方向の長さの比であるアスペクト比と厚みに対するY軸方向の長さの比であるアスペクト比の双方が相対的に高い部材であってもよい。この場合、連結部材34dの剛性は、上述した移動条件#X及び移動条件#Yの双方を満たしやすくなる。更に、この場合であっても、連結部材34は、Z軸方向の厚みに対してX軸方向及びY軸方向それぞれの長さが十分に大きい部材である場合には、連結部材34dの剛性は、上述した変位吸収条件を満たすことができる点に変わりはない。連結部材34dのその他の特徴は、連結部材34のその他の特徴と同一であってもよい。
As shown in FIG. 16, the
連結部材34dは、板バネであってもよい。このとき、連結部材34dは、XY平面又はXY平面と平行な面に沿った板状の形状を有していてもよい。連結部材34dは、ステージ走り面又はステージ走り面と平行な面に沿った板状の形状を有していてもよい。
The connecting
このような第4実施形態の加工システムSYSdは、上述した第1実施形態の加工システムSYSaが享受可能な効果と同様の効果を享受することができる。 The processing system SYSd of the fourth embodiment can enjoy the same effects as the processing system SYSa of the first embodiment described above.
尚、第4実施形態においても、第2実施形態で説明した構成要件及び第3実施形態で説明した構成要件(例えば、複数の連結部材34に関する構成要件)の少なくとも一つが採用されてもよい。 In the fourth embodiment, at least one of the constituent features described in the second embodiment and the constituent features described in the third embodiment (for example, the constituent features regarding the plurality of connecting members 34) may be adopted.
(5)第5実施形態の加工システムSYSe
続いて、第5実施形態の加工システムSYS(以降、第5実施形態の加工システムSYSを、“加工システムSYSe”と称する)について説明する。第5実施形態の加工システムSYSeは、上述した第1実施形態の加工システムSYSaと比較して、ステージ装置3に代えてステージ装置3eを備えているという点で異なる。加工システムSYSeのその他の特徴は、加工システムSYSaのその他の特徴と同一であってもよい。従って、以下では、図17及び図18を参照しながら、第5実施形態のステージ装置3eについて説明する。図17及び図18のそれぞれは、第5実施形態のステージ装置3eを示す断面図である。 (5) Processing system SYSe of the fifth embodiment
Next, the processing system SYS of the fifth embodiment (hereinafter, the processing system SYS of the fifth embodiment will be referred to as the "processing system SYSe") will be described. The processing system SYSe of the fifth embodiment differs from the processing system SYSa of the first embodiment described above in that it includes a
図17及び図18に示すように、ステージ装置3eは、上述したステージ装置3と比較して、Xレール部材331Xが定盤31に埋設されているという点で異なる。ステージ装置3eのその他の特徴は、ステージ装置3のその他の特徴と同一であってもよい。
As shown in FIGS. 17 and 18, the
Xレール部材331Xは、Xレール部材331Xの上面が定盤31の上面311よりも+Z側に位置しない(つまり、上方に位置しない)ように、定盤31に埋設されている。Xレール部材331Xは、Xレール部材331Xの上面が定盤31の上面311よりも+Z側に突き出ないように、定盤31に埋設されている。この際、Xレール部材331Xの上面のZ軸方向における位置は、定盤31の上面311のZ軸方向における位置と同じであってもよい。つまり、Xレール部材331Xの上面は、定盤31の上面311と同じ高さに配置されていてもよい。或いは、Xレール部材331Xの上面のZ軸方向における位置は、定盤31の上面311のZ軸方向における位置よりも-Z側に(つまり、下方に)位置していてもよい。つまり、Xレール部材331Xの上面は、定盤31の上面311よりも低い位置に配置されていてもよい。
The
このようにXレール部材331Xが定盤31に埋設されると、Xレール部材331Xがエアベアリング35の移動にとって障害になることがなくなる。具体的には、図18に示すように、Yスライド部材332Yの移動に伴ってステージ32(更には、エアベアリング35)がY軸方向に沿って移動したとしても、エアベアリング35がXレール部材331Xに接触することがなくなる。つまり、第5実施形態では、Xレール部材331Xを含むステージ駆動系33は、エアベアリング35の移動に干渉しない(つまり、エアベアリング35の移動にとって障害とならない)位置に配置される。
When the
このため、ステージ32の下面322上の限定的な位置(例えば、ステージ32が移動した場合であってもZ軸方向においてXレール部材331Xと重ならないようにエアベアリング35を配置可能な位置)にエアベアリング35を配置しなくてもよくなる。つまり、ステージ32が移動した場合にZ軸方向においてXレール部材331Xとエアベアリング35とが重なるような位置に、エアベアリング35を配置することができる。ステージ32が移動した場合にZ軸方向においてXレール部材331Xと重なるように、エアベアリング35を配置することができる。このため、エアベアリング35の配置位置の自由度が増加する。
Therefore, the
このような第5実施形態の加工システムSYSeは、上述した第1実施形態の加工システムSYSaが享受可能な効果と同様の効果を享受することができると共に、エアベアリング35の配置位置の自由度を増加させることができる。更には、エアベアリング35の配置位置の自由度が増加したことにより、ステージ32のサイズが過度に大きくなることを防止することも可能となる。一例として、上述したようにXレール部材331Xがエアベアリング35のY軸方向における移動(つまり、ステージ32のY軸方向における移動)にとって障害となる場合には、ステージ32のY軸方向の移動ストローク量を確保するために、Y軸方向におけるエアベアリング35とXレール部材331Xとの間の距離を相対的に大きくすることが望まれる(図6参照)。この場合、エアベアリング35が配置されるステージ32のY軸方向のサイズ(つまり、長さ)が大きくなるほど、Y軸方向におけるエアベアリング35とXレール部材331Xとの間の距離が大きくなる。しかしながら、この場合には、ワークWのY軸方向のサイズと比較してステージ32のY軸方向のサイズがかなり大きくなってしまう可能性がある。つまり、ステージ32のY軸方向の移動ストローク量を確保するというメリットと引き換えに、ステージ32のサイズが増大してしまうというデメリットが顕在化する。しかるに、第5実施形態では、エアベアリング35の配置の自由度が増加するがゆえに、Y軸方向におけるエアベアリング35とXレール部材331Xとの間の距離を相対的に大きくしなくても、ステージ32のY軸方向の移動ストローク量を確保することができる。
The machining system SYSe of the fifth embodiment can enjoy the same effects as the machining system SYSa of the first embodiment described above, and can also increase the degree of freedom in the arrangement position of the
尚、Xスライド部材332Xは、定盤31に埋設されていなくてもよい。或いは、Xスライド部材332Xは、定盤31に埋設されていてもよい。例えば、Xスライド部材332Xの上面が定盤31の上面311よりも+Z側に位置しないように、Xスライド部材332Xが定盤31に埋設されていてもよい。この際、Xスライド部材332Xの上面のZ軸方向における位置は、定盤31の上面311のZ軸方向における位置と同じであってもよい。Xスライド部材332Xの上面が定盤31の上面311よりも+Z側に位置しない場合には、Xスライド部材332Xがエアベアリング35の移動にとって障害になることがなくなる。尚、Xスライド部材332Xがエアベアリング35の移動にとって障害になるケースは、Xスライド部材332Xに配置されているYレール部材331YとZ軸方向において重なる位置にエアベアリング35が配置されるケースである。つまり、Xスライド部材332Xは、Yレール部材331YとZ軸方向において重なる位置に配置されているエアベアリング35のY軸方向における移動にとって障害になる可能性がある。一方で、Xスライド部材332Xは、Yレール部材331YとZ軸方向において重ならない位置に配置されているエアベアリング35のY軸方向における移動にとっては、障害になることはない。図6に示す例で言えば、Xスライド部材332Xは、エアベアリング35-3のY軸方向における移動にとって障害となる可能性はある。一方で、図6に示す例で言えば、Xスライド部材332Xは、エアベアリング35-1及び35-2のそれぞれのY軸方向における移動にとって障害となることはない。
Note that the
尚、第5実施形態においても、第2実施形態から第3実施形態で説明した構成要件及び第4実施形態で説明した構成要件(例えば、連結部材34dに関する構成要件)の少なくとも一つが採用されてもよい。
Note that the fifth embodiment also employs at least one of the constituent features explained in the second to third embodiments and the constituent features explained in the fourth embodiment (for example, the constituent features regarding the connecting
(6)第6実施形態の加工システムSYSf
続いて、第6実施形態の加工システムSYS(以降、第6実施形態の加工システムSYSを、“加工システムSYSf”と称する)について説明する。第6実施形態の加工システムSYSfは、上述した第1実施形態の加工システムSYSaと比較して、ステージ装置3に代えてステージ装置3fを備えているという点で異なる。加工システムSYSfのその他の特徴は、加工システムSYSaのその他の特徴と同一であってもよい。従って、以下では、図19及び図20を参照しながら、第6実施形態のステージ装置3fについて説明する。図19及び図20のそれぞれは、第6実施形態のステージ装置3fを示す断面図である。 (6) Processing system SYSf of the sixth embodiment
Next, the processing system SYS of the sixth embodiment (hereinafter, the processing system SYS of the sixth embodiment will be referred to as the "processing system SYSf") will be described. The processing system SYSf of the sixth embodiment differs from the processing system SYSa of the first embodiment described above in that it includes a
図19及び図20に示すように、ステージ装置3fは、上述したステージ装置3と比較して、Xレール部材331Xが定盤31から上方に離れた位置に配置されているという点で異なる。具体的には、ステージ装置3fは、支持部材37fを備えている。図19に示す例では、ステージ装置3fは、2つの支持部材37fを備えているが、支持部材37fの数が2つに限定されることはない。支持部材37fは、定盤31(例えば、定盤31の上面311)に配置されている。支持部材37fは、定盤31から上方に向かって延びる部材である。支持部材37fは、Xレール部材331Xを下方から支持する。図19に示す例では、2つの支持部材37fは、Xレール部材331Xの両端部又はその近傍においてXレール部材331Xを下方から支持する。その結果、Xレール部材331Xは、定盤31から上方に離れた位置に配置される。
As shown in FIGS. 19 and 20, the
ステージ装置3fは更に、上述したステージ装置3と比較して、ステージ32に代えてステージ32fを備えているという点で異なる。ステージ装置3fのその他の特徴は、ステージ装置3のその他の特徴と同一であってもよい。
The
ステージ32fは、天井部材324fと、底部材325fと、側壁部材326fとを備えている。天井部材324fは、XY平面に平行な板状の部材である。天井部材324fの上面にワークWが載置される。天井部材324fの下面に、スペーサ349を介して連結部材34が連結される。このため、ステージ32fは、上述したステージ32と同様に、Yスライド部材332Yの移動に伴ってX軸方向及びY軸方向のそれぞれにそって移動可能である。底部材325fは、XY平面に平行な板状の部材である。底部材325fは、天井部材324fの下方に配置される。底部材325fの下面には、取付部材36を介してエアベアリング35が配置される。このため、ステージ32fは、ステージ32と同様に、Z軸方向においてエアベアリング35によって支持される。側壁部材326fは、XZ平面に平行な板状の部材である。側壁部材326fは、天井部材324fと底部材325fとを連結する部材である。具体的には、ステージ32fは、天井部材324fの+Y側の外縁と底部材325fの+Y側の外縁とを連結する側壁部材326f-1と、天井部材324fの-Y側の外縁と底部材325fの-Y側の外縁とを連結する側壁部材326f-2とを備えている。その結果、天井部材324fと底部材325fと側壁部材326fとを備えるステージ32fは、筒状の形状を有する。
The
天井部材324fと底部材325fと側壁部材326fとによって囲まれた内部空間327fは、ステージ駆動系33の少なくとも一部を収容する(つまり、配置する)ための収容空間として用いられる。図19及び図20に示す例では、内部空間327fには、Xレール部材331Xの一部、Xスライド部材332X、Yレール部材331Yの一部、及び、Yスライド部材332Yが収容されている。このため、第6実施形態では、Xスライド部材332Xは、内部空間327fに収容された状態でX軸方向に沿って移動する。Yスライド部材332Yは、内部空間327fに収容された状態でY軸方向に沿って移動する。更に、内部空間327fには、連結部材34が収容されている。従って、第6実施形態では、連結部材34は、内部空間327fにおいてYスライド部材332Yとステージ32f(特に、天井部材324f)とを連結する。
The
上述したようにステージ32fが筒状の形状を有しているため、内部空間327fは、内部空間327fの端部たる開口3281fを介してステージ32fの外部の空間に繋がっている。具体的には、内部空間327fは、内部空間327fの+X側の端部たる開口3281f-1を介してステージ32fの外部の空間に繋がっている。内部空間327fは、内部空間327fの-X側の端部たる開口3281f-2を介してステージ32fの外部の空間に繋がっている。Xレール部材331Xは、この開口3281f-1及び3281f-2を介して内部空間327fからステージ32fの外部の空間に延びる。Xレール部材331Xが開口3281f-1及び3281f-2を介して内部空間327fからステージ32fの外部の空間に延びるために、開口3281f-1と開口3281f-2とを結ぶ軸は、Xレール部材331Xが延びる方向(つまり、X軸方向)に平行になる。その結果、Xレール部材331XがX軸方向に延びる部材(特に、相対的に長い部材)であったとしても、Xレール部材331Xがステージ32fの移動にとって障害となることはない。つまり、ステージ32fは、Xレール部材331Xが開口3281f-1及び3281f-2を介して内部空間327fからステージ32fの外部の空間に延びる状態を維持しながら、X軸方向に沿って移動可能となる。ステージ32fは、Xレール部材331Xがステージ32fに接触しない状態を維持しながら、X軸方向に沿って移動可能となる。
As described above, since the
側壁部材326fには、開口3282fが形成されている。具体的には、側壁部材326f-1には、開口3282f-1が形成されており、側壁部材326f-2には、開口3282f-2が形成されている。Yレール部材331Yは、この開口3282f-1及び3282f-2を介して内部空間327fからステージ32fの外部の空間に延びる。Yレール部材331Yが開口3282f-1及び3282f-2を介して内部空間327fからステージ32fの外部の空間に延びるために、開口3282f-1と開口3282f-2とを結ぶ軸は、Yレール部材331Yが延びる方向(つまり、Y軸方向)に平行になる。その結果、Yレール部材331YがY軸方向に延びる部材(特に、相対的に長い部材)であったとしても、Yレール部材331Yがステージ32fの移動にとって障害となることはない。つまり、ステージ32fは、Yレール部材331Yが開口3282f-1及び3282f-2を介して内部空間327fからステージ32fの外部の空間に延びる状態を維持しながら、Y軸方向に沿って移動可能となる。ステージ32fは、Yレール部材331Yがステージ32fに接触しない(特に、側壁部材326fに接触しない)状態を維持しながら、Y軸方向に沿って移動可能となる。
An
このようにXレール部材331Xが定盤31から上方に離れた位置に配置され且つステージ32fの底部材325f(具体的には、ステージ駆動系33よりも下方に位置する部材)にエアベアリング35が配置されると、Xレール部材331Xがエアベアリング35の移動にとって障害になることがなくなる。具体的には、Yスライド部材332Yの移動に伴ってステージ32(更には、エアベアリング35)がY軸方向に沿って移動したとしても、Xレール部材331Xが定盤31上に配置されていないがゆえに、定盤31との間に薄い気体膜を形成した状態で移動するエアベアリング35がXレール部材331Xに接触することがなくなる。つまり、第6実施形態では、Xレール部材331Xを含むステージ駆動系33は、エアベアリング35の移動に干渉しない(つまり、エアベアリング35の移動にとって障害とならない)位置に配置される。このため、第5実施形態においても、第6実施形態と同様に、エアベアリング35の配置位置の自由度が増加する。
In this way, the
このような第6実施形態の加工システムSYSfは、上述した第1実施形態の加工システムSYSaが享受可能な効果と同様の効果を享受することができると共に、エアベアリング35の配置位置の自由度を増加させることができる。
The machining system SYSf of the sixth embodiment can enjoy the same effects as the machining system SYSa of the first embodiment described above, and also has a greater degree of freedom in the arrangement position of the
尚、第6実施形態においても、第2実施形態から第4実施形態で説明した構成要件及び第5実施形態で説明した構成要件(例えば、Xレール部材331Xの定盤31への埋設に関する構成要件)の少なくとも一つが採用されてもよい。
Note that, also in the sixth embodiment, the constituent features described in the second to fourth embodiments and the constituent features explained in the fifth embodiment (for example, the constituent features regarding embedding the
(7)第7実施形態の加工システムSYSg
続いて、第7実施形態の加工システムSYS(以降、第7実施形態の加工システムSYSを、“加工システムSYSg”と称する)について説明する。第7実施形態の加工システムSYSgは、上述した第1実施形態の加工システムSYSaと比較して、ステージ装置3に代えてステージ装置3gを備えているという点で異なる。加工システムSYSgのその他の特徴は、加工システムSYSaのその他の特徴と同一であってもよい。従って、以下では、図21及び図22を参照しながら、第7実施形態のステージ装置3gについて説明する。図21は、第7実施形態のステージ装置3gを示す上面図である。図22は、図21に示すステージ装置3gのXXI-XXI’断面図である。 (7) Processing system SYSg of the seventh embodiment
Next, the processing system SYS of the seventh embodiment (hereinafter, the processing system SYS of the seventh embodiment will be referred to as the "processing system SYSg") will be described. The processing system SYSg of the seventh embodiment differs from the processing system SYSa of the first embodiment described above in that it includes a
図21及び図22に示すように、ステージ装置3gは、上述したステージ装置3と比較して、保護部材38gを備えているという点で異なる。ステージ装置3gのその他の特徴は、ステージ装置3のその他の特徴と同一であってもよい。
As shown in FIGS. 21 and 22, the
保護部材38gは、Xスライド部材332X上に配置されている。このため、保護部材38gは、Xスライド部材332Xの移動に伴って、Xスライド部材332Xに配置されているYステージ駆動系33Yと共にX軸方向に沿って移動する。
The
保護部材38gは、Yステージ駆動系33Yの周辺に配置される。具体的には、保護部材38gは、Yステージ駆動系33Yの少なくとも一部を取り囲むように配置される。保護部材38gは、Yレール部材331Y及びYスライド部材332Yの少なくとも一部を取り囲むように配置される。つまり、Yレール部材331Y及びYスライド部材332Yの少なくとも一部は、保護部材38gが取り囲む空間38SPに配置される。この場合、保護部材38gが取り囲む空間38SPには、当該空間38SPの外部の空間(具体的には、筐体4の内部の収容空間SP)からの物質が侵入する可能性が相対的に小さくなる。例えば、収容空間SPには、ワークWに対する加工に伴って生ずる生成物が存在する可能性がある。このような生成物の一例として、加工光ELの照射によって生ずる物質(例えば、溶融又は蒸発したワークWの材料を含むヒューム)があげられる。例えば、収容空間SPには、ワークWに対する加工のために収容空間SPに供給される必要物が存在する可能性がある。このような必要物の一例として、後述するように加工システムSYSgが付加加工を行う場合において収容空間SPに供給される材料(つまり、付加加工用の材料)があげられる。第7実施形態では、このような生成物及び/又は必要物を含む物質(以降、説明の便宜上、“侵入物質”と称する)が収容空間SPから空間38SPに侵入する可能性が相対的に小さくなる。このため、保護部材38gは、空間38SPに対する侵入物質の侵入を低減する部材として機能可能である。
The
上述したように、空間38SPには、Yレール部材331Y及びYスライド部材332Yの少なくとも一部が配置されている。このため、Yレール部材331Y及びYスライド部材332Yが配置されている空間の少なくとも一部に侵入物質が侵入する可能性が相対的に小さくなる。その結果、侵入物質がYレール部材331Y及びYスライド部材332Yの少なくとも一部に付着する可能性が相対的に小さくなる。このため、保護部材38gは、Yレール部材331Y及びYスライド部材332Yの少なくとも一部に対する侵入物質の付着を低減する部材として機能してもよい。仮にYレール部材331Y及び/又はYスライド部材332Yに侵入物質が付着すると、Yレール部材331Yに沿ったYスライド部材332Yの適切な移動が妨げられる可能性がある。しかるに、第7実施形態では、保護部材38gが配置されているがゆえに、保護部材38gが配置されていない場合と比較して、Yレール部材331Yに沿ったYスライド部材332Yの適切な移動が妨げられる可能性は小さくなる。このため、Yスライド部材332Y(更には、Yスライド部材332Yに連結されているステージ32)は、Y軸方向に沿って適切に移動可能となる。
As described above, at least a portion of the
尚、保護部材38gには、開口38APが形成されていてもよい。開口38APは、連結部材34が通過する空間として用いられてもよい。つまり、連結部材34は、開口38APを介して、空間38SPに配置されているYスライド部材332Yから、空間38SPの外部に位置するステージ32に向かって延びていてもよい。
Note that an opening 38AP may be formed in the
図21及び図22は、上述したように機能する保護部材38gの構造の一具体例が記載されている。図21及び図22に示す例では、保護部材38gは、保護部材381gと、保護部材382gと、保護部材383gとを備えている。
21 and 22 show a specific example of the structure of the
保護部材381gは、Xスライド部材332X上に配置されている。保護部材381gは、Xスライド部材332Xから+Z側に(つまり、上方に)向かって延びる部材である。保護部材381gは、Yレール部材331Yの左右一方側(図22に示す例では、-X側)に配置される。保護部材381gは、Yレール部材331Yとの間に間隙を確保しながらYレール部材331Yに沿って延びる。つまり、保護部材381gは、Y軸方向に沿って延びる部材である。このような保護部材381gは、空間38SPを規定する側壁部材として用いられる。
The
保護部材382gは、保護部材381gの+Z側の端部(つまり、外縁)から側方(図22に示す例では、+X側)に向かって延びる部材である。保護部材382gは、Yレール部材331Y及びYスライド部材332Yの少なくとも一部の上方に配置される。保護部材382gは、Yレール部材331Y及びYスライド部材332Yとの間に間隙を確保しながらYレール部材331Yに沿って延びる。つまり、保護部材382gは、Y軸方向に沿って延びる部材である。このような保護部材382gは、空間38SPを規定する天井部材として用いられる。
The
保護部材383gは、Xスライド部材332Xから+Z側に(つまり、上方に)向かって延びる部材である。保護部材383gは、Yレール部材331Yの左右他方側(図22に示す例では、+X側)に配置される。保護部材383gは、保護部材381gとの間にYレール部材331Yの少なくとも一部を挟み込むように配置される。保護部材383gは、Yレール部材331Yとの間に間隙を確保しながらYレール部材331Yに沿って延びる。つまり、保護部材383gは、Y軸方向に沿って延びる部材である。このような保護部材383gは、空間38SPを規定する側壁部材として用いられる。
The
保護部材382gと保護部材383gとの間の間隙は、連結部材34が通過する開口38APとして用いられる。保護部材382g及び383gのそれぞれがY軸方向に沿って延びる部材であるため、開口38APは、Y軸方向が長手方向となる長手形状を有する開口となる。その結果、Yレール部材331Yに沿ってYスライド部材332Yが移動したとしても、Yスライド部材332Yの移動に伴ってYスライド部材332Yと移動する連結部材34が保護部材382g及び383gに接触することはない。
The gap between the
このような第7実施形態の加工システムSYSgは、上述した第1実施形態の加工システムSYSaが享受可能な効果と同様の効果を享受することができると共に、Yスライド部材332Y(更には、ステージ32)を相対的にスムーズに及び/又は精度よく移動させることができる。
The processing system SYSg of the seventh embodiment can enjoy the same effects as the processing system SYSa of the first embodiment described above, and the
尚、ステージ装置3gは、保護部材38gに加えて又は代えて、Xレール部材331X及びXスライド部材332Xの少なくとも一部に対する侵入物質の付着を低減する部材を備えていてもよい。ステージ装置3gは、侵入物質の付着を低減したい構成要件(例えば、ステージ駆動系33、駆動系5及び駆動系6の少なくとも一部)が配置されている空間への侵入物質の侵入を低減する部材を備えていてもよい。
In addition to or in place of the
第7実施形態においても、第2実施形態から第5実施形態で説明した構成要件及び第6実施形態で説明した構成要件(例えば、定盤31から離れた位置に配置されるXレール部材331Xに関する構成要件)の少なくとも一つが採用されてもよい。
Also in the seventh embodiment, the constituent features explained in the second to fifth embodiments and the constituent features explained in the sixth embodiment (for example, regarding the
(8)第8実施形態の加工システムSYSh
続いて、第8実施形態の加工システムSYS(以降、第8実施形態の加工システムSYSを、“加工システムSYSh”と称する)について説明する。第8実施形態の加工システムSYShは、上述した第1実施形態の加工システムSYSaと比較して、ステージ装置3に代えてステージ装置3hを備えているという点で異なる。加工システムSYShのその他の特徴は、加工システムSYSaのその他の特徴と同一であってもよい。従って、以下では、図23を参照しながら、第8実施形態のステージ装置3hについて説明する。図23は、第8実施形態のステージ装置3hを示す上面図である。 (8) Processing system SYSh of the eighth embodiment
Next, the processing system SYS of the eighth embodiment (hereinafter, the processing system SYS of the eighth embodiment will be referred to as "processing system SYSh") will be described. The processing system SYSh of the eighth embodiment differs from the processing system SYSa of the first embodiment described above in that it includes a
図23に示すように、ステージ装置3hは、上述したステージ装置3と比較して、連結部材34に代えて連結部材34hを備えているという点で異なる。ステージ装置3hのその他の特徴は、ステージ装置3のその他の特徴と同一であってもよい。
As shown in FIG. 23, the
連結部材34hは、連結部材34と比較して、弾性ヒンジとして機能可能な構造を有しているという点で異なる。連結部材34hのその他の特徴は、連結部材34のその他の特徴と同一であってもよい。
The connecting
弾性ヒンジとして機能するために、連結部材34hは、連結部分341hと、連結部分342hと、中間部分343hと、切れ欠き部分344hと、切れ欠き部分345hとを含む。連結部分341hは、上述した連結部分341と同様に、連結部材34hのうちYスライド部材332Yに連結される部分である。連結部分342hは、上述した連結部分342と同様に、連結部材34hのうちステージ32に連結される部分である。中間部分343hは、連結部材34hのうち連結部分341hと連結部分342hとの間に位置する部分である。切れ欠き部分344hは、連結部材34hのうち連結部分341hと中間部分343hとをつなぐ部分である。切れ欠き部分345hは、連結部材34hのうち連結部分342hと中間部分343hとをつなぐ部分である。切れ欠き部分344h及び345hのそれぞれには、切れ欠きが形成されている。
In order to function as an elastic hinge, the connecting
このような弾性ヒンジとして機能可能な連結部材34hもまた、上述した連結部材34と同様に、変位吸収条件を満たす剛性を有することになる。つまり、ステージ駆動系33のZ軸方向の変位(特に、Yスライド部材332YのZ軸方向の変位)が、連結部材34hによって吸収される。この連結部材34hによるステージ駆動系33の変位の吸収について、図24及び図25を参照しながら説明する。図24は、第8実施形態においてYスライド部材332Yが+Z側に変位する様子を示す断面図である。図25は、第8実施形態においてYスライド部材332Yが-Z側に変位する様子を示す断面図である。
The connecting
図24に示すように、ステージ32がステージ走り面に沿って移動しているときにYスライド部材332Yが+Z側に変位すると、連結部材34hのうちYスライド部材332Yに連結されている連結部分341hもまた、+Z側に変位する。この場合、連結部分341hを+Z側に変位させるようにYスライド部材332Yから連結部分341hに伝達された力に起因して、弾性ヒンジとして機能可能な連結部材34hが変形(具体的には、弾性変形)する。具体的には、連結部材34hは、ステージ32に連結されている連結部分342hが+Z側に変位しないように又はワークWの加工精度に殆ど影響を与えない程度しか連結部分342hが+Z側に変位しないように変形する。同様に、図25に示すように、ステージ32がステージ走り面に沿って移動しているときにYスライド部材332Yが-Z側に変位すると、連結部分341hもまた、-Z側に変位する。この場合であっても、連結部材34hは、連結部分342hが-Z側に変位しないように又はワークWの加工精度に殆ど影響を与えない程度しか連結部分342hが-Z側に変位しないように変形する。従って、第8実施形態においても、第1実施形態と同様に、ステージ駆動系33のZ軸方向の変位に起因して、ワークWの加工精度に影響を与えるほどにステージ32がZ軸方向に沿って意図せず移動することはない。このため、ステージ駆動系33のZ軸方向の変位が連結部材34hによって吸収されない場合と比較して、ワークWの加工精度が向上する。
As shown in FIG. 24, when the
このような第8実施形態の加工システムSYShは、上述した第1実施形態の加工システムSYSaが享受可能な効果と同様の効果を享受することができる。 The processing system SYSh of the eighth embodiment can enjoy the same effects as the processing system SYSa of the first embodiment described above.
尚、第8実施形態においても、第2実施形態から第6実施形態で説明した構成要件及び第7実施形態で説明した構成要件(例えば、保護部材38gに関する構成要件)の少なくとも一つが採用されてもよい。
Note that the eighth embodiment also employs at least one of the constituent features explained in the second to sixth embodiments and the constituent features explained in the seventh embodiment (for example, constituent features regarding the
(9)第9実施形態の加工システムSYSi
続いて、第9実施形態の加工システムSYS(以降、第9実施形態の加工システムSYSを、“加工システムSYSi”と称する)について説明する。第9実施形態の加工システムSYSiは、上述した第1実施形態の加工システムSYSaと比較して、ステージ装置3に代えてステージ装置3iを備えているという点で異なる。加工システムSYSiのその他の特徴は、加工システムSYSaのその他の特徴と同一であってもよい。従って、以下では、図26を参照しながら、第9実施形態のステージ装置3iについて説明する。図26は、第9実施形態のステージ装置3iを示す上面図である。 (9) Processing system SYSi of the ninth embodiment
Next, the processing system SYS of the ninth embodiment (hereinafter, the processing system SYS of the ninth embodiment will be referred to as the "processing system SYSi") will be described. The processing system SYSi of the ninth embodiment differs from the processing system SYSa of the first embodiment described above in that it includes a
図26に示すように、ステージ装置3iは、上述したステージ装置3と比較して、連結部材34に代えて連結部材34iを備えているという点で異なる。ステージ装置3iのその他の特徴は、ステージ装置3のその他の特徴と同一であってもよい。
As shown in FIG. 26, the
連結部材34iは、連結部材34と比較して、リンク機構を構成しているという点で異なる。連結部材34iのその他の特徴は、連結部材34のその他の特徴と同一であってもよい。
The connecting
リンク機構を構成するために、連結部材34iは、連結部分341iと、連結部分342iと、中間部分343iとを含む。連結部分341iは、上述した連結部分341と同様に、連結部材34iのうちYスライド部材332Yに連結される部分である。連結部分342iは、上述した連結部分342と同様に、連結部材34iのうちステージ32に連結される部分である。中間部分343iは、連結部材34iのうち連結部分341iと連結部分342iとの間に位置する部分である。連結部分341i、連結部分342i及び中間部分343iのそれぞれは、リンク機構におけるリンクに相当する。連結部分341iと中間部分343iとは、ジョイント344iを介して接続されている。連結部分341iは、ジョイント344iによって規定される回転軸(特に、XY平面に平行な回転軸であり、図26に示す例ではY軸)周りに回転可能である。中間部分343iは、ジョイント344iによって規定される回転軸周りに回転可能である。連結部分341iと中間部分343iとは、互いに別々に回転可能(つまり、移動可能)である。連結部分342iと中間部分343iとは、ジョイント345iを介して接続されている。連結部分342iは、ジョイント345iによって規定される回転軸(特に、XY平面に平行な回転軸であり、図26に示す例ではY軸)周りに回転可能である。中間部分343iは、ジョイント344iによって規定される回転軸周りに回転可能である。連結部分342iと中間部分343iとは、互いに別々に回転可能(つまり、移動可能)である。
To configure the link mechanism, the connecting
このようなリンク機構を構成する連結部材34iは、上述した変位吸収条件を満たす剛性を有していようが有していなかろうが、Yスライド部材332YのZ軸方向に沿った変位を吸収することができる。つまり、ステージ駆動系33のZ軸方向の変位(特に、Yスライド部材332YのZ軸方向の変位)が、連結部材34iによって吸収される。この連結部材34iによるステージ駆動系33の変位の吸収について、図27及び図28を参照しながら説明する。図27は、第9実施形態においてYスライド部材332Yが+Z側に変位する様子を示す断面図である。図28は、第9実施形態においてYスライド部材332Yが-Z側に変位する様子を示す断面図である。
The connecting
図27に示すように、ステージ32がステージ走り面に沿って移動しているときにYスライド部材332Yが+Z側に変位すると、連結部材34iのうちYスライド部材332Yに連結されている連結部分341iもまた、+Z側に変位する。この場合、連結部分341iと中間部分343iとを接続するジョイント344iもまた、+Z側に変位する。一方で、連結部分341iと中間部分343iと連結部分342iとが互いに別々に移動可能であるがゆえに、中間部分343iの一端に形成されたジョイント344iが+Z側に変位した場合であっても、中間部分343iの他端に形成されたジョイント345iは、+Z側に変位しない。或いは、ジョイント345iが仮に+Z側に変位したとしても、その変位量は極めて小さい。なぜならば、中間部分343iの一端を+Z側に変位させるように中間部分343iに伝達された力は、中間部分343iをジョイント345iが規定する回転軸周りに回転させるための力として利用されるからである。その結果、ジョイント345iを介して中間部分343iの他端に接続された連結部分342i(つまり、ステージ32に連結された連結部分342i)は、+Z側に変位しないか又はワークWの加工精度に殆ど影響を与えない程度しか連結部分342hが+Z側に変位しない。ステージ32がステージ走り面に沿って移動しているときにYスライド部材332Yが-Z側に変位する場合も同様に、図28に示すように、中間部分343iの他端に形成されたジョイント345iは、-Z側に変位しない。或いは、ジョイント345iが仮に-Z側に変位したとしても、その変位量は極めて小さい。その結果、ステージ32に連結された連結部分342iは、-Z側に変位しないか又はワークWの加工精度に殆ど影響を与えない程度しか連結部分342hが+Z側に変位しない。従って、第9実施形態においても、第1実施形態と同様に、ステージ駆動系33のZ軸方向の変位に起因して、ワークWの加工精度に影響を与えるほどにステージ32がZ軸方向に沿って意図せず移動することはない。このため、ステージ駆動系33のZ軸方向の変位が連結部材34iによって吸収されない場合と比較して、ワークWの加工精度が向上する。
As shown in FIG. 27, when the
このような第9実施形態の加工システムSYSiは、上述した第1実施形態の加工システムSYSaが享受可能な効果と同様の効果を享受することができる。 The processing system SYSi of the ninth embodiment can enjoy the same effects as the processing system SYSa of the first embodiment described above.
尚、第9実施形態においても、第2実施形態から第7実施形態で説明した構成要件及び第8実施形態で説明した構成要件(例えば、連結部材34hに関する構成要件)の少なくとも一つが採用されてもよい。
Note that the ninth embodiment also employs at least one of the constituent features explained in the second to seventh embodiments and the constituent features explained in the eighth embodiment (for example, constituent features regarding the connecting
(10)第10実施形態の加工システムSYSj
続いて、第10実施形態の加工システムSYS(以降、第10実施形態の加工システムSYSを、“加工システムSYSj”と称する)について説明する。第10実施形態の加工システムSYSjは、上述した第1実施形態の加工システムSYSaと比較して、ステージ装置3に代えてステージ装置3jを備えているという点で異なる。加工システムSYSjのその他の特徴は、加工システムSYSaのその他の特徴と同一であってもよい。従って、以下では、図29を参照しながら、第10実施形態のステージ装置3jについて説明する。図29は、第10実施形態のステージ装置3jを示す上面図である。 (10) Processing system SYSj of the tenth embodiment
Next, the processing system SYS according to the tenth embodiment (hereinafter, the processing system SYS according to the tenth embodiment will be referred to as "processing system SYSj") will be described. The processing system SYSj of the tenth embodiment differs from the processing system SYSa of the first embodiment described above in that it includes a stage device 3j instead of the
図29に示すように、ステージ装置3jは、上述したステージ装置3と比較して、連結部材34に代えて連結部材34jを備えているという点で異なる。ステージ装置3jのその他の特徴は、ステージ装置3のその他の特徴と同一であってもよい。
As shown in FIG. 29, the stage device 3j differs from the
連結部材34jは、連結部材34と比較して、直動ガイドを利用してYスライド部材332YのZ軸方向に沿った変位を吸収するという点で異なる。連結部材34jのその他の特徴は、連結部材34のその他の特徴と同一であってもよい。
The connecting
連結部材34jは、連結部分341jと、連結部分342jと、スライド部分343jと、レール部分344jとを含む。連結部分341jは、上述した連結部分341と同様に、連結部材34jのうちYスライド部材332Yに連結される部分である。連結部分342jは、上述した連結部分342と同様に、連結部材34jのうちステージ32に連結される部分である。スライド部分343jは、連結部分341jに連結されている。レール部分344jは、連結部分342jに連結されている。レール部分344jは、Z軸方向に沿って延びる部材である。スライド部分343jは、レール部分344jに沿って移動可能となるように、レール部分344jに取り付けられている。このため、スライド部分343jは、Z軸方向に沿って移動可能となる。このように、連結部材34jは、スライド部分343j及びレール部分344jを含む直動ガイドを含んでいる。
The connecting
このような直動ガイドを含む連結部材34jは、上述した変位吸収条件を満たす剛性を有していようが有していなかろうが、Yスライド部材332YのZ軸方向に沿った変位を吸収することができる。つまり、ステージ駆動系33のZ軸方向の変位(特に、Yスライド部材332YのZ軸方向の変位)が、連結部材34jによって吸収される。この連結部材34jによるステージ駆動系33の変位の吸収について、図30及び図31を参照しながら説明する。図30は、第10実施形態においてYスライド部材332Yが+Z側に変位する様子を示す断面図である。図31は、第10実施形態においてYスライド部材332Yが-Z側に変位する様子を示す断面図である。
The connecting
図30に示すように、ステージ32がステージ走り面に沿って移動しているときにYスライド部材332Yが+Z側に変位すると、連結部材34jのうちYスライド部材332Yに連結されている連結部分341jもまた、+Z側に変位する。その結果、連結部分341jに連結されているスライド部分343jもまた、+Z側に変位する。一方で、スライド部分343jが+Z側に変位したとしても、スライド部分343jが取り付けられているレール部分344jが+Z側に変位することはない。このため、レール部分344jに連結された連結部分342j(つまり、ステージ32に連結された連結部分342j)もまた、+Z側に変位することはない。ステージ32がステージ走り面に沿って移動しているときにYスライド部材332Yが-Z側に変位する場合も同様に、図31に示すように、連結部分341j及びスライド部分343jが-Z側に変位する一方で、レール部分344j及び連結部分342jが-Z側に変位することはない。従って、第10実施形態においても、第1実施形態と同様に、ステージ駆動系33のZ軸方向の変位に起因して、ワークWの加工精度に影響を与えるほどにステージ32がZ軸方向に沿って意図せず移動することはない。このため、ステージ駆動系33のZ軸方向の変位が連結部材34jによって吸収されない場合と比較して、ワークWの加工精度が向上する。
As shown in FIG. 30, when the
このような第10実施形態の加工システムSYSjは、上述した第1実施形態の加工システムSYSaが享受可能な効果と同様の効果を享受することができる。 The processing system SYSj of the tenth embodiment can enjoy the same effects as the processing system SYSa of the first embodiment described above.
尚、第10実施形態においても、第2実施形態から第8実施形態で説明した構成要件及び第9実施形態で説明した構成要件(例えば、連結部材34iに関する構成要件)の少なくとも一つが採用されてもよい。
Note that the tenth embodiment also employs at least one of the constituent features explained in the second to eighth embodiments and the constituent features explained in the ninth embodiment (for example, the constituent features regarding the connecting
(11)第11実施形態の加工システムSYSk
続いて、第11実施形態の加工システムSYS(以降、第11実施形態の加工システムSYSを、“加工システムSYSk”と称する)について説明する。第11実施形態の加工システムSYSkは、上述した第1実施形態の加工システムSYSaと比較して、ステージ装置3に代えてステージ装置3kを備えているという点で異なる。加工システムSYSkのその他の特徴は、加工システムSYSaのその他の特徴と同一であってもよい。従って、以下では、図32及び図33を参照しながら、第11実施形態のステージ装置3kについて説明する。図32は、第11実施形態のステージ装置3kを示す上面図である。図33は、図32に示すステージ装置3kのXXXII-XXXII’断面図である。 (11) Processing system SYSk of the eleventh embodiment
Next, a processing system SYS according to the eleventh embodiment (hereinafter, the processing system SYS according to the eleventh embodiment will be referred to as "processing system SYSk") will be described. The processing system SYSk of the eleventh embodiment differs from the processing system SYSa of the first embodiment described above in that it includes a
図32及び図33に示すように、ステージ装置3kは、上述したステージ装置3と比較して、連結部材34とステージ32とステージ駆動系33との位置関係が異なるという点で異なる。具体的には、上述したステージ装置3では、連結部材34は、ステージ32の下方の空間の少なくとも一部を介して、Yスライド部材332Yとステージ32とを連結する。つまり、ステージ32の下方にステージ駆動系33が配置されており、且つ、連結部材34は、ステージ32の下方の空間においてYスライド部材332Yからステージ32に向かって延びる。一方で、第11実施形態のステージ装置3kでは、連結部材34は、ステージ32の側方の空間の少なくとも一部を介して、Yスライド部材332Yとステージ32とを連結する。つまり、第11実施形態のステージ装置3kでは、ステージ32の側方にステージ駆動系33が配置されており(つまり、XY平面に沿った方向においてステージ32の位置とステージ駆動系33の位置とが異なり)、連結部材34は、ステージ32の側方の空間を介してYスライド部材332Yからステージ32に向かって延びる。ステージ装置3kのその他の特徴は、ステージ装置3のその他の特徴と同一であってもよい。
As shown in FIGS. 32 and 33, the
このような第11実施形態の加工システムSYSkは、上述した第1実施形態の加工システムSYSaが享受可能な効果と同様の効果を享受することができる。 The processing system SYSk of the eleventh embodiment can enjoy the same effects as the processing system SYSa of the first embodiment described above.
尚、図32及び図33に示す例では、連結部材34は、スペーサ349を介することなくステージ32に連結されているが、スペーサ349を介してステージ32に連結されていてもよい。エアベアリング35は、取付部材36を介することなくステージ32に取り付けられているが、取付部材36を介してステージ32に取り付けられていてもよい。
In the example shown in FIGS. 32 and 33, the connecting
第11実施形態においても、第2実施形態から第9実施形態で説明した構成要件及び第10実施形態で説明した構成要件(例えば、連結部材34jに関する構成要件)の少なくとも一つが採用されてもよい。
Also in the eleventh embodiment, at least one of the constituent features explained in the second to ninth embodiments and the constituent features explained in the tenth embodiment (for example, constituent features regarding the connecting
(12)第12実施形態の加工システムSYSl
続いて、第12実施形態の加工システムSYS(以降、第12実施形態の加工システムSYSを、“加工システムSYSl”と称する)について説明する。第12実施形態の加工システムSYSlは、上述した第11実施形態の加工システムSYSkと比較して、ステージ装置3kに代えてステージ装置3lを備えているという点で異なる。加工システムSYSlのその他の特徴は、加工システムSYSkのその他の特徴と同一であってもよい。従って、以下では、図34及び図35を参照しながら、第12実施形態のステージ装置3lについて説明する。図34は、第12実施形態のステージ装置3lを示す上面図である。図35は、図34に示すステージ装置3lのXXXIV-XXXIV’断面図である。 (12) Processing system SYSl of the twelfth embodiment
Next, a processing system SYS according to the twelfth embodiment (hereinafter, the processing system SYS according to the twelfth embodiment will be referred to as "processing system SYSl") will be described. The processing system SYSl of the twelfth embodiment differs from the processing system SYSk of the eleventh embodiment described above in that it includes a stage device 3l instead of the
図34及び図35に示すように、ステージ装置3lは、上述したステージ装置3kと比較して、ステージ駆動系33を複数備えているという点で異なっている。図34及び図35に示す例では、ステージ装置3lは、ステージ32の左右一方側(例えば、+Y側)に配置されるステージ駆動系33と、ステージ32の左右他方側(例えば、-Y側)に配置されるステージ駆動系33とを備えている。尚、以下の説明では、ステージ32の左右一方側に配置されるステージ駆動系33に関する構成要件の参照符号の末尾に「-1」を付与すると共にステージ32の左右他方側に配置されるステージ駆動系33に関する構成要件の参照符号の末尾に「-2」を付与することで、この両者を区別する。
As shown in FIGS. 34 and 35, the stage device 3l is different from the
更に、ステージ装置3lは、上述したステージ装置3kと比較して、複数のステージ駆動系33がそれぞれ備える複数のYスライド部材332Yとステージ32とをそれぞれ連結する複数の連結部材34を備えている。図34及び図35に示す例では、ステージ装置3lは、ステージ駆動系33-1が備えるYスライド部材332Y-1とステージ32とを連結する連結部材34(以降、“連結部材34-1”と称する)と、ステージ駆動系33-2が備えるYスライド部材332Y-2とステージ32とを連結する連結部材34(以降、“連結部材34-2”と称する)とを備える。
Furthermore, compared to the
ステージ装置3lのその他の特徴は、ステージ装置3lのその他の特徴と同一であってもよい。 Other features of the stage device 3l may be the same as other features of the stage device 3l.
このような第12実施形態の加工システムSYSlは、上述した第11実施形態の加工システムSYSkが享受可能な効果と同様の効果を享受することができる。 The processing system SYSl of the twelfth embodiment can enjoy the same effects as the processing system SYSk of the eleventh embodiment described above.
尚、ステージ装置3lは、ステージ駆動系33を複数備える一方で、単一の連結部材34を備えていてもよい。ステージ装置3lは、単一のステージ駆動系33を備える一方で、複数の連結部材34を備えていてもよい(第3実施形態参照)。
Note that the stage device 3l may include a plurality of
上述した第1実施形態のステージ装置3から第10実施形態のステージ装置jのそれぞれもまた、第12実施形態のステージ装置3lと同様に、複数のステージ駆動系33を備えていてもよい。上述した第1実施形態のステージ装置3から第10実施形態のステージ装置jのそれぞれもまた、第12実施形態のステージ装置3lと同様に、複数のステージ駆動系33にそれぞれ対応する複数の連結部材34を備えていてもよい。
Each of the
第12実施形態においても、第1実施形態から第10実施形態で説明した構成要件の少なくとも一つが採用されてもよい。 Also in the twelfth embodiment, at least one of the constituent elements described in the first to tenth embodiments may be adopted.
(13)その他の変形例
上述した説明では、ステージ駆動系33が、直動ガイドを含むステージ駆動系である。しかしながら、ステージ駆動系33は、ステージ32をX軸方向及びY軸方向のそれぞれに沿って移動させることができる限りは、どのような駆動系であってもよい。この場合であっても、ステージ駆動系33が備えるX軸方向及び/又はY軸方向に沿って移動する移動部材とステージ32とが上述した連結部材34を介して連結される限りは、上述した効果が享受可能となる。 (13) Other Modifications In the above description, the
上述した説明では、ステージ装置3は、Z軸方向においてステージ32を支持するための支持部材として、エアベアリング35を備えている。しかしながら、ステージ装置3は、Z軸方向においてステージ32を支持するための支持部材として、エアベアリング35とは異なる支持部材を備えていてもよい。この支持部材は、定盤31に対して非接触な状態で(或いは、ステージ32に対して非接触な状態で)ステージ32を支持する支持部材であってもよい。
In the above description, the
上述した説明では、加工装置1は、ワークWに加工光ELを照射して、ワークWの一部を除去する除去加工を行っている。しかしながら、加工装置1は、除去加工に加えて又は代えて、ワークWに加工光ELを照射して、除去加工とは異なる加工を行ってもよい。例えば、加工装置1は、ワークWに加工光ELを照射して、ワークWに付加加工を行ってもよい。例えば、加工装置1は、ワークWの表面の少なくとも一部の特性を加工光ELの照射によって変えて、ワークWの表面に所望のパターン(例えば、文字パターン、図形パターン又は任意のパターン)を形成するマーキング加工を行ってもよい。
In the above description, the
上述した説明では、加工システムSYSは、計測装置2を備えているが、計測装置2を備えていなくてもよい。
In the above description, the processing system SYS includes the measuring
上述した説明では、加工装置1は、エネルギビームの一例である加工光ELをワークWに照射することで、ワークWを加工している。しかしながら、加工装置1は、光とは異なる任意のエネルギビームをワークWに照射して、ワークWを加工してもよい。この場合、加工装置1は、光源11に加えて又は代えて、任意のエネルギビームを照射可能なビーム照射装置を備えていてもよい。任意のエネルギビームは、限定されないが、電子ビーム、イオンビーム等の荷電粒子ビーム又は電磁波を含んでいてもよい。
In the above description, the
上述した説明では、ワークWを加工する加工システムSYSがステージ装置3を備えている。しかしながら、ワークW(或いは、任意の物体)を用いて何らかの動作又は処理を行う任意の装置が、ワークW(或いは、任意の物体)が載置される載置装置として、上述したステージ装置3を備えていてもよい。
In the above description, the processing system SYS that processes the workpiece W includes the
上述した説明では、ステージ装置3にワークWが載置されている。しかしながら、ステージ装置3上に加工装置1及び/又は計測装置2を設けてもよい。
In the above description, the workpiece W is placed on the
(14)付記
以上説明した実施形態に関して、更に以下の付記を開示する。
[付記1]
物体が載置される載置部材と、
支持方向において前記載置部材を支持する支持部材と、
前記支持方向に交差する移動方向に沿って移動可能な移動部材を含む移動装置と、
前記移動部材と前記載置部材とを連結する連結部材と
を備え、
前記連結部材のうち前記移動部材に連結される第1部分と前記連結部材のうち前記載置部材に連結される第2部分とは、前記支持方向に関して別々に移動可能である
載置装置。
[付記2]
前記支持方向に関して前記第1部分が第1移動量だけ移動する期間中に、前記支持方向に関して前記第2部分が前記第1移動量よりも少ない第2移動量しか移動しない
付記1に記載の載置装置。
[付記3]
前記支持方向に関して前記第1部分が移動する期間中に、前記支持方向に関して前記第2部分が移動しない
付記1又は2に記載の載置装置。
[付記4]
前記連結部材は、前記支持方向における前記移動部材の移動に起因して前記移動部材から前記連結部材に加わる力が、前記連結部材を介して前記載置部材へ伝達することを抑制する
付記1から3のいずれか一項に記載の載置装置。
[付記5]
物体が載置される載置部材と、
支持方向において前記載置部材を支持する支持部材と、
前記支持方向に交差する移動方向に沿って移動可能な移動部材を含む移動装置と、
前記移動部材と前記載置部材とを連結する連結部材と
を備え、
前記連結部材は、前記支持方向における前記移動部材の移動に起因して前記移動部材から前記連結部材に加わる力が、前記連結部材を介して前記載置部材へ伝達することを抑制する
載置装置。
[付記6]
前記連結部材は、前記移動方向における剛性が前記支持方向における剛性よりも高い部材である
付記1から5のいずれか一項に記載の物体載置装置。
[付記7]
物体が載置される載置部材と、
支持方向において前記載置部材を支持する支持部材と、
前記支持方向に交差する移動方向に沿って移動可能な移動部材を含む移動装置と、
前記移動部材と前記載置部材とを連結する連結部材と
を備え、
前記連結部材は、前記移動方向における剛性が前記支持方向における剛性よりも高い部材である
物体載置装置。
[付記8]
前記載置部材は、前記連結部材を介して前記載置部材に連結される前記移動部材の移動に伴って前記移動方向に沿って移動可能であり、
前記連結部材の前記移動方向における剛性は、前記移動部材の前記移動方向に沿った移動に伴って、前記移動部材の前記移動方向における移動態様から想定される所望の移動態様で前記載置部材が前記移動方向に沿って移動するという移動条件を満たす
付記1から7のいずれか一項に記載の物体載置装置。
[付記9]
前記移動態様は、移動の向き、移動量及び移動速度の少なくとも一つを含む
付記8に記載の物体載置装置。
[付記10]
前記移動条件は、(i)前記移動部材の前記移動方向における移動の向きが、前記載置部材の前記移動方向における移動の向きと一致するという条件、(ii)前記移動部材の前記移動方向における移動量が、前記載置部材の前記移動方向における移動量と比例するという条件、及び、(iii)前記移動部材の前記移動方向における移動速度が、前記載置部材の前記移動方向における移動速度と一致するという条件の少なくとも一つを含む
付記8又は9に記載の物体載置装置。
[付記11]
前記連結部材の前記支持方向における剛性は、前記移動部材の前記支持方向に沿った変位を吸収するように前記支持方向において変形するという変位吸収条件を満たす
付記1から10のいずれか一項に記載の物体載置装置。
[付記12]
前記連結部材は、弾性体を含む
付記1から11のいずれか一項に記載の載置装置。
[付記13]
物体が載置される載置部材と、
支持方向において前記載置部材を支持する支持部材と、
前記支持方向に交差する移動方向に沿って移動可能な移動部材を含む移動装置と、
前記移動部材と前記載置部材とを連結し且つ弾性体を含む連結部材と
を備える載置装置。
[付記14]
前記弾性体は、バネ及び弾性ヒンジの少なくとも一つを含む
付記12又は13に記載の載置装置。
[付記15]
前記バネは、板バネを含む
付記14に記載の載置装置。
[付記16]
前記連結部材は、前記移動部材に連結される第1部分と、前記載置部材に連結される第2部分と、第1ジョイントを介して前記第1部分と連結され且つ前記第2ジョイントを介して前記第2部分と連結される第3部分とを含み、
前記第1及び第3部分は、前記ジョイントを介して、前記支持方向に交差する軸周りに別々に移動可能であり、
前記第2及び第3部分は、前記第2ジョイントを介して、前記支持方向に交差する軸周りに別々に移動可能である
付記1から15のいずれか一項に記載の載置装置。
[付記17]
前記第1及び第3部分は、前記第1リンク機構を回転中心として、前記支持方向に交差する軸周りに別々に回転可能であり、
前記第2及び第3部分は、前記第2リンク機構を回転中心として、前記支持方向に交差する軸周りに別々に回転可能である
付記16に記載の載置装置。
[付記18]
前記連結部材は、前記移動部材に連結される第1部分と、前記載置部材に連結される第2部分と、前記支持方向に沿って延在すると共に前記第2部分と連結される第3部分を含んでおり、
前記第1部分は、前記第3部分に沿って前記第3部分に対して移動可能である
付記1から15のいずれか一項に記載の載置装置。
[付記19]
前記連結部材は、前記移動部材から前記載置部材に向かって延在する
付記1から18のいずれか一項に記載の載置装置。
[付記20]
前記連結部材は、前記移動部材の一の部分から前記載置部材の他の部分に向かって延在する
付記1から19のいずれか一項に記載の載置装置。
[付記21]
前記連結部材は、前記支持方向に交差する方向に沿って延在する
付記1から20のいずれか一項に記載の載置装置。
[付記22]
前記連結部材は、板状の形状又は長手形状の部材を含む
付記1から21のいずれか一項に記載の載置装置。
[付記23]
前記載置部材の少なくとも一部と前記移動部材の少なくとも一部とは、前記支持方向に沿って隣接する
付記1から22のいずれか一項に記載の載置装置。
[付記24]
前記載置部材と前記移動部材とは、前記支持方向に関して異なる位置に配置される
付記1から23のいずれか一項に記載の載置装置。
[付記25]
前記載置部材の少なくとも一部と前記移動部材の少なくとも一部とは、前記支持方向に交差する方向に関して同じ位置に配置される
付記1から24のいずれか一項に記載の載置装置。
[付記26]
前記載置部材の少なくとも一部は、前記支持方向に沿って前記移動部材の少なくとも一部に対向する
付記1から25のいずれか一項に記載の載置装置。
[付記27]
前記連結部材は、前記移動部材の一の部分と、前記支持方向に交差する方向に関する位置が前記一の部分とは異なる前記載置部材の他の部分とを連結する
付記1から26のいずれか一項に記載の載置装置。
[付記28]
前記支持方向は、鉛直方向であり、
前記載置部材の少なくとも一部は、前記移動部材の少なくとも一部の上方に位置する
付記1から27のいずれか一項に記載の載置装置。
[付記29]
前記連結部材は、前記載置部材の少なくとも一部の下方の空間を介して前記移動部材と前記載置部材とを連結する
付記28に記載の載置装置。
[付記30]
前記連結部材の少なくとも一部は、前記載置部材の少なくとも一部の下方の空間に配置される
付記28又は29に記載の載置装置。
[付記31]
前記載置部材と前記移動部材とは、前記支持方向に交差する方向に関して異なる位置に配置される
付記1から30に記載の載置装置。
[付記32]
前記支持方向は、鉛直方向であり、
前記載置部材は、前記移動部材の側方に位置する
付記1から31のいずれか一項に記載の載置装置。
[付記33]
前記連結部材は、前記載置部材の少なくとも一部の側方の空間を介して前記移動部材と前記載置部材とを連結する
付記32に記載の載置装置。
[付記34]
前記連結部材の少なくとも一部は、前記載置部材の少なくとも一部の側方の空間に配置される
付記32又は33に記載の載置装置。
[付記35]
前記載置部材は、前記連結部材を介して前記載置部材に連結される前記移動部材の移動に伴って前記移動方向に沿って移動可能である
付記1から34のいずれか一項に記載の載置装置。
[付記36]
前記載置部材を支持する前記支持部材は、前記連結部材を介して前記載置部材に連結される前記移動部材の移動に伴って前記移動方向に沿って移動可能である
付記1から35のいずれか一項に記載の載置装置。
[付記37]
前記移動装置は、前記支持部材の移動に干渉しない位置に配置される
付記36に記載の載置装置。
[付記38]
前記支持部材は、対向部材に対向した状態で移動し、
前記移動装置の少なくとも一部は、前記対向部材の表面から前記移動方向に交差する方向に沿って突き出ないように、前記対向部材に埋設される
付記37に記載の載置装置。
[付記39]
前記移動装置は、前記支持方向に交差する第1の移動方向に沿って延在する第1の延在部材と、前記第1の延在部材に沿って移動可能な第1の移動部材と、前記第1の移動方向に交差する第2の移動方向に沿って延在し且つ前記第1の移動部材に接続される第2の延在部材と、前記第2の延在部材に沿って移動可能であって且つ前記連結部材によって前記載置部材に連結される第2の移動部材とを含み、
前記第1の延在部材が、前記対向部材の表面から前記移動方向に交差する方向に沿って突き出ないように前記対向部材に埋設される
付記38に記載の載置装置。
[付記40]
前記支持部材は、対向部材に対向した状態で移動し、
前記移動装置の少なくとも一部は、前記対向部材の表面から前記移動方向に交差する方向に沿って離れた位置に配置される
付記37に記載の載置装置。
[付記41]
前記載置部材には、内部空間が形成されており、
前記移動装置の少なくとも一部は、前記内部空間に配置される
付記40に記載の載置装置。
[付記42]
前記載置部材には、内部空間が形成されており、
前記移動部材は、前記内部空間を移動可能である
付記40又は41に記載の物体載置装置。
[付記43]
前記移動装置は、前記支持方向に交差する第1の移動方向に沿って延在する第1の延在部材と、前記第1の延在部材に沿って移動可能な第1の移動部材と、前記第1の移動方向に交差する第2の移動方向に沿って延在し且つ前記第1の移動部材に接続される第2の延在部材と、前記第2の延在部材に沿って移動可能であって且つ前記連結部材によって前記載置部材に連結される第2の移動部材とを含み、
前記第1及び第2の延在部材の少なくとも一部が、前記内部空間に配置され、
前記第1及び第2の移動部材の少なくとも一部が、前記内部空間を移動可能である
付記40から42のいずれか一項に記載の載置装置。
[付記44]
前記載置部材には、前記内部空間につながる開口が形成されており、
前記第1及び第2の延在部材の少なくとも一方は、前記開口を介して、前記内部空間から前記載置部材の外部の空間に延在可能である
付記43に記載の載置装置。
[付記45]
前記載置部材は、前記対向部材の表面に対向可能な第1の外面と、前記第1の外面とは異なる第2の外面とを備え、
前記第1の外面に、前記支持部材が配置され、
前記第2の外面に、前記物体が載置される
付記40から44のいずれか一項に記載の載置装置。
[付記46]
前記移動装置の少なくとも一部を取り囲む周辺部材を更に備える
付記1から45のいずれか一項に記載の載置装置。
[付記47]
前記周辺部材は、前記移動装置の少なくとも一部に対する物質の付着を低減する
付記46に記載の載置装置。
[付記48]
前記周辺部材は、前記移動部材が移動する空間の少なくとも一部への物質の侵入を低減する
付記46又は47に記載の載置装置。
[付記49]
前記移動装置は、前記移動方向に沿って延在する延在部材と、前記延在部材に沿って移動可能な前記移動部材とを備え、
前記周辺部材は、前記延在部材の少なくとも一部を取り囲む
付記46から48のいずれか一項に記載の載置装置。
[付記50]
前記移動装置は、前記移動方向に沿って延在する延在部材と、前記延在部材に沿って移動可能な前記移動部材とを備え、
前記延在部材の少なくとも一部を取り囲む周辺部材を更に備える
付記1から49のいずれか一項に記載の載置装置。
[付記51]
前記周辺部材は、前記延在部材の少なくとも一部に対する物質の付着を低減する
付記49又は50に記載の載置装置。
[付記52]
前記周辺部材は、前記延在部材が存在する空間の少なくとも一部への物質の侵入を低減する
付記49から51のいずれか一項に記載の載置装置。
[付記53]
前記物質は、前記物体の加工に伴って生ずる物質を含む
付記47、48、51又は52に記載の載置装置。
[付記54]
前記周辺部材には、開口が形成されている
付記46から53のいずれか一項に記載の載置装置。
[付記55]
前記連結部材は、前記開口を介して、前記周辺部材が取り囲む空間から前記周辺部材の外部の空間に向かって延在する
付記54に記載の載置装置。
[付記56]
前記支持部材は、前記支持方向における基準面と前記載置部材との間の相対位置を維持するように前記載置部材を支持する
付記1から55のいずれか一項に記載の載置装置。
[付記57]
前記支持部材は、前記基準面に対して非接触な状態で前記載置部材を支持する
付記1から56のいずれか一項に記載の載置装置。
[付記58]
前記支持部材は、前記載置部材に配置されている
付記57に記載の載置装置。
[付記59]
前記支持部材は、前記基準面との間に気体膜を形成して前記基準面に対して前記載置部材を浮上させることで、前記載置部材を支持する
付記57又は58に記載の載置装置。
[付記60]
前記支持部材は、対向部材に対向し、
前記基準面は、前記対向部材の表面を含む
付記56から59のいずれか一項に記載の載置装置。
[付記61]
前記連結部材を複数備える
請求項1から60のいずれか一項に記載の物体載置装置。
[付記62]
前記支持部材は、エアベアリングを含む
付記1から61のいずれか一項に記載の載置装置。
[付記63]
前記連結部材を複数備える
付記1から62のいずれか一項に記載の載置装置。
[付記64]
前記支持方向は、鉛直方向である
付記1から63のいずれか一項に記載の載置装置。
[付記65]
前記移動方向は、水平面に沿った方向である
付記1から64のいずれか一項に記載の載置装置。
[付記66]
付記1から65のいずれか一項に記載の載置装置と、
前記物体を加工する加工装置と
を備える加工システム。
[付記67]
付記1から65のいずれか一項に記載の載置装置に載置された前記物体を加工する加工方法。
[付記68]
第1面を有する第1部材と、
前記第1面から第1方向に離れた第2部材を有する載置装置と、
前記第2部材を前記第1面上で移動する移動装置と、
物体にエネルギビームを照射することにより前記物体を加工する加工装置と、
前記物体を計測する計測装置と
を備え、
前記載置装置は、前記第2部材に設けられ、前記第2部材を前記第1面上に浮上させる浮上部材を有し、
前記移動装置は、前記浮上部材により前記第1面上で浮上された前記第2部材を、前記第1方向と交差する方向に移動し、
前記加工装置と前記計測装置とのうち少なくとも1つは前記第2部材に設けられる
加工システム。
[付記69]
前記加工装置は、前記物体に前記エネルギビームを照射する照射光学装置を備える
付記68に記載の加工システム。
[付記70]
前記加工装置によって加工される前記物体の部位を計測する計測装置を更に備える
付記68又は69に記載の加工システム。
[付記71]
前記計測装置は、前記第1方向に関する前記物体の表面の位置を計測する
付記70に記載の加工システム。
[付記72]
前記計測装置は、前記第1面と平行な面内において複数箇所で計測する
付記71に記載の加工システム。
[付記73]
前記移動装置は、移動部材を有し、
前記第2部材と前記移動部材は、連結部材で連結され、
前記移動装置は、前記移動部材を移動することにより、前記第2部材を、前記第1面上で、前記第1方向と交差する方向に移動する
付記68から72のいずれか一項に記載の加工システム。
[付記74]
前記第2部材は、前記第1面をガイド面として、前記第1面上で、前記第1方向と交差する方向に移動し、
前記移動部材は、前記第1部材とは異なるガイド部材上で移動する
付記73に記載の加工システム。
[付記75]
前記移動装置は、前記移動部材の前記第1方向の位置を制御しない
付記73又は74に記載の加工システム。
[付記76]
前記連結部材の前記第1方向に関する剛性は、前記第1方向と交差する方向に関する剛性よりも低い
付記73から75のいずれか一項に記載の加工システム。
[付記77]
前記浮上部材は、前記浮上部材と前記第1面との間にガスベアリングを形成し、
前記連結部材と前記ガスベアリングにより、前記第2部材と前記第1面との位置関係を維持する
付記73から76のいずれか一項に記載の加工システム。 (14) Additional Notes Regarding the embodiments described above, the following additional notes are further disclosed.
[Additional note 1]
a mounting member on which an object is mounted;
a support member that supports the mounting member in the support direction;
a moving device including a moving member movable along a moving direction intersecting the supporting direction;
a connecting member connecting the moving member and the placing member;
A first portion of the connection member connected to the moving member and a second portion of the connection member connected to the placement member are movable separately in the support direction.
[Additional note 2]
[Additional note 3]
The mounting device according to
[Additional note 4]
The connecting member suppresses a force applied from the moving member to the connecting member due to movement of the moving member in the supporting direction from being transmitted to the mounting member via the connecting member. 3. The mounting device according to any one of 3.
[Additional note 5]
a mounting member on which an object is mounted;
a support member that supports the mounting member in the support direction;
a moving device including a moving member movable along a moving direction intersecting the supporting direction;
a connecting member connecting the moving member and the placing member;
The connecting member suppresses a force applied from the moving member to the connecting member due to movement of the moving member in the support direction from being transmitted to the mounting member via the connecting member. .
[Additional note 6]
The object mounting device according to any one of
[Additional note 7]
a mounting member on which an object is mounted;
a support member that supports the mounting member in the support direction;
a moving device including a moving member movable along a moving direction intersecting the supporting direction;
a connecting member connecting the moving member and the placing member;
The connecting member is a member having higher rigidity in the moving direction than in the supporting direction.
[Additional note 8]
The mounting member is movable along the moving direction as the moving member connected to the mounting member via the connecting member moves,
The rigidity of the connecting member in the moving direction is such that, as the moving member moves along the moving direction, the mounting member moves in a desired moving manner assumed from the moving manner of the moving member in the moving direction. The object mounting device according to any one of
[Additional note 9]
The object mounting device according to
[Additional note 10]
The movement conditions include (i) a condition that the movement direction of the movement member in the movement direction matches the movement direction of the mounting member in the movement direction; (ii) a condition that the movement direction of the movement member in the movement direction the amount of movement is proportional to the amount of movement of the placement member in the movement direction, and (iii) the movement speed of the movement member in the movement direction is equal to the movement speed of the placement member in the movement direction; The object mounting device according to
[Additional note 11]
According to any one of
[Additional note 12]
The mounting device according to any one of
[Additional note 13]
a mounting member on which an object is mounted;
a support member that supports the mounting member in the support direction;
a moving device including a moving member movable along a moving direction intersecting the supporting direction;
A mounting device comprising: a connecting member that connects the moving member and the mounting member and includes an elastic body.
[Additional note 14]
The mounting device according to
[Additional note 15]
The mounting device according to
[Additional note 16]
The connecting member includes a first portion connected to the movable member, a second portion connected to the placement member, and connected to the first portion via a first joint and connected to the second portion via the second joint. a third portion connected to the second portion;
The first and third portions are separately movable via the joint around an axis intersecting the support direction,
The mounting device according to any one of
[Additional note 17]
The first and third portions are separately rotatable around an axis intersecting the support direction, with the first link mechanism as a rotation center,
The mounting device according to
[Additional note 18]
The connecting member includes a first portion connected to the moving member, a second portion connected to the placement member, and a third portion extending along the support direction and connected to the second portion. contains a part,
The mounting device according to any one of
[Additional note 19]
The mounting device according to any one of
[Additional note 20]
The mounting device according to any one of
[Additional note 21]
The mounting device according to any one of
[Additional note 22]
The mounting device according to any one of
[Additional note 23]
23. The mounting device according to any one of
[Additional note 24]
The mounting device according to any one of
[Additional note 25]
25. The mounting device according to any one of
[Additional note 26]
26. The mounting device according to any one of
[Additional note 27]
The connecting member connects one part of the movable member and another part of the mounting member whose position in a direction intersecting the support direction is different from that of the one part. The mounting device according to
[Additional note 28]
The support direction is a vertical direction,
28. The mounting device according to any one of
[Additional note 29]
The mounting device according to attachment 28, wherein the connecting member connects the moving member and the mounting member through a space below at least a portion of the mounting member.
[Additional note 30]
The mounting device according to appendix 28 or 29, wherein at least a portion of the connecting member is arranged in a space below at least a portion of the mounting member.
[Additional note 31]
31. The mounting device according to
[Additional note 32]
The support direction is a vertical direction,
The mounting device according to any one of
[Additional note 33]
The mounting device according to
[Additional note 34]
The mounting device according to
[Additional note 35]
The mounting member is movable along the movement direction in accordance with movement of the moving member connected to the mounting member via the connection member. Mounting device.
[Appendix 36]
Any of
[Additional note 37]
The mounting device according to
[Appendix 38]
The support member moves while facing the opposing member,
The mounting device according to attachment 37, wherein at least a portion of the moving device is embedded in the opposing member so as not to protrude from the surface of the opposing member in a direction intersecting the moving direction.
[Additional note 39]
The moving device includes a first extending member extending along a first moving direction intersecting the supporting direction, and a first moving member movable along the first extending member. a second extending member extending along a second moving direction intersecting the first moving direction and connected to the first moving member; and a second extending member moving along the second moving member. a second moving member capable of moving and connected to the mounting member by the connecting member;
39. The mounting device according to attachment 38, wherein the first extending member is embedded in the opposing member so as not to protrude from the surface of the opposing member in a direction intersecting the moving direction.
[Additional note 40]
The support member moves while facing the opposing member,
The mounting device according to attachment 37, wherein at least a portion of the moving device is disposed at a position away from the surface of the opposing member in a direction intersecting the moving direction.
[Additional note 41]
The mounting member has an internal space formed therein;
The mounting device according to attachment 40, wherein at least a portion of the moving device is arranged in the internal space.
[Additional note 42]
The mounting member has an internal space formed therein;
The object mounting device according to attachment 40 or 41, wherein the moving member is movable in the internal space.
[Additional note 43]
The moving device includes a first extending member extending along a first moving direction intersecting the supporting direction, and a first moving member movable along the first extending member. a second extending member extending along a second moving direction intersecting the first moving direction and connected to the first moving member; and a second extending member moving along the second moving member. a second moving member capable of moving and connected to the mounting member by the connecting member;
At least a portion of the first and second extending members are arranged in the internal space,
The mounting device according to any one of appendices 40 to 42, wherein at least a portion of the first and second moving members are movable in the internal space.
[Additional note 44]
The mounting member has an opening connected to the internal space,
The mounting device according to attachment 43, wherein at least one of the first and second extending members can extend from the internal space to a space outside the mounting member through the opening.
[Additional note 45]
The mounting member includes a first outer surface that can face the surface of the opposing member, and a second outer surface that is different from the first outer surface,
the support member is disposed on the first outer surface,
The mounting device according to any one of appendices 40 to 44, wherein the object is mounted on the second outer surface.
[Additional note 46]
The mounting device according to any one of
[Additional note 47]
47. The mounting device according to attachment 46, wherein the peripheral member reduces adhesion of substances to at least a portion of the moving device.
[Additional note 48]
The mounting device according to attachment 46 or 47, wherein the peripheral member reduces intrusion of substances into at least a portion of the space in which the moving member moves.
[Additional note 49]
The moving device includes an extending member extending along the moving direction, and the moving member movable along the extending member,
The mounting device according to any one of appendices 46 to 48, wherein the peripheral member surrounds at least a portion of the extension member.
[Additional note 50]
The moving device includes an extending member extending along the moving direction, and the moving member movable along the extending member,
50. The mounting device according to any one of
[Additional note 51]
The mounting device according to attachment 49 or 50, wherein the peripheral member reduces adhesion of substances to at least a portion of the elongated member.
[Additional note 52]
The mounting device according to any one of appendices 49 to 51, wherein the peripheral member reduces intrusion of substances into at least a portion of the space in which the extension member exists.
[Additional note 53]
The mounting device according to
[Additional note 54]
The mounting device according to any one of appendices 46 to 53, wherein an opening is formed in the peripheral member.
[Additional note 55]
55. The mounting device according to attachment 54, wherein the connecting member extends from a space surrounded by the peripheral member to a space outside the peripheral member through the opening.
[Additional note 56]
56. The mounting device according to any one of
[Additional note 57]
57. The mounting device according to any one of
[Additional note 58]
The mounting device according to attachment 57, wherein the support member is arranged on the mounting member.
[Additional note 59]
The mounting according to attachment 57 or 58, wherein the support member supports the mounting member by forming a gas film between the supporting member and the reference surface and floating the mounting member with respect to the reference surface. Device.
[Additional note 60]
The support member faces the opposing member,
The mounting device according to any one of Supplementary Notes 56 to 59, wherein the reference plane includes a surface of the opposing member.
[Additional note 61]
The object mounting device according to any one of
[Additional note 62]
The mounting device according to any one of
[Additional note 63]
The mounting device according to any one of
[Additional note 64]
The mounting device according to any one of
[Additional note 65]
65. The mounting device according to any one of
[Additional note 66]
The mounting device according to any one of
A processing system comprising: a processing device that processes the object;
[Additional note 67]
A processing method for processing the object placed on the mounting device according to any one of
[Additional note 68]
a first member having a first surface;
a mounting device having a second member spaced apart from the first surface in a first direction;
a moving device that moves the second member on the first surface;
a processing device that processes the object by irradiating the object with an energy beam;
and a measuring device that measures the object,
The mounting device includes a floating member that is provided on the second member and floats the second member above the first surface,
The moving device moves the second member floated on the first surface by the floating member in a direction intersecting the first direction,
At least one of the processing device and the measuring device is provided in the second member. Processing system.
[Additional note 69]
The processing system according to attachment 68, wherein the processing device includes an irradiation optical device that irradiates the object with the energy beam.
[Additional note 70]
The processing system according to attachment 68 or 69, further comprising a measuring device that measures a part of the object processed by the processing device.
[Additional note 71]
The processing system according to attachment 70, wherein the measuring device measures the position of the surface of the object with respect to the first direction.
[Additional note 72]
The processing system according to attachment 71, wherein the measuring device measures at multiple locations within a plane parallel to the first surface.
[Additional note 73]
The moving device has a moving member,
the second member and the moving member are connected by a connecting member;
The moving device moves the second member on the first surface in a direction intersecting the first direction by moving the moving member. processing system.
[Additional note 74]
The second member moves on the first surface in a direction intersecting the first direction, using the first surface as a guide surface,
The processing system according to attachment 73, wherein the moving member moves on a guide member different from the first member.
[Additional note 75]
The processing system according to attachment 73 or 74, wherein the moving device does not control the position of the moving member in the first direction.
[Additional note 76]
The processing system according to any one of attachments 73 to 75, wherein the rigidity of the connecting member in the first direction is lower than the rigidity in a direction intersecting the first direction.
[Additional note 77]
The floating member forms a gas bearing between the floating member and the first surface,
The processing system according to any one of appendices 73 to 76, wherein the connection member and the gas bearing maintain the positional relationship between the second member and the first surface.
上述の各実施形態の構成要件の少なくとも一部は、上述の各実施形態の構成要件の少なくとも他の一部と適宜組み合わせることができる。上述の各実施形態の構成要件のうちの一部が用いられなくてもよい。また、法令で許容される限りにおいて、上述の各実施形態で引用した全ての公開公報及び米国特許の開示を援用して本文の記載の一部とする。 At least some of the constituent features of each of the above-described embodiments can be combined as appropriate with at least some of the other constituent features of each of the above-described embodiments. Some of the constituent elements of each embodiment described above may not be used. In addition, to the extent permitted by law, the disclosures of all publications and US patents cited in each of the above-mentioned embodiments are incorporated into the description of the main text.
本発明は、上述した実施例に限られるものではなく、特許請求の範囲及び明細書全体から読み取れる発明の要旨或いは思想に反しない範囲で適宜変更可能であり、そのような変更を伴う移動体装置、載置装置、加工システム及び加工方法もまた本発明の技術的範囲に含まれるものである。 The present invention is not limited to the embodiments described above, and can be modified as appropriate within the scope of the claims and the overall spirit or idea of the invention as can be seen from the entire specification. , a mounting device, a processing system, and a processing method are also included in the technical scope of the present invention.
SYS 加工システム
1 加工装置
2 計測装置
3 ステージ装置
32 ステージ
31 定盤
32 ステージ
33 ステージ駆動系
33X Xステージ駆動系
331X Xレール部材
332X Xスライド部材
33Y Yステージ駆動系
331Y Yレール部材
332Y Yスライド部材
34 連結部材
35 エアベアリング
36 取付部材
4 筐体
7 制御装置
W ワーク
EL 加工光
Claims (28)
前記第1面から第1方向に離れた少なくとも第2面内で移動可能に設けられる第2部材と、
前記第2部材に設けられ、前記第2部材を前記第1面上に浮上させる浮上部材と、
前記第1方向と交差する第2方向に延びたガイドに沿って移動部材を移動させるアクチュエータを備える移動装置と、
前記移動部材と前記第2部材とを連結する連結部材と
を備え、
前記連結部材の前記第1方向に関する剛性は、前記第2面と平行な方向に関する剛性よりも低く、
前記移動部材は前記ガイドに接触しつつ前記第2方向に移動する
移動体装置。 a first member having a first surface;
a second member that is movable within at least a second surface that is spaced from the first surface in a first direction;
a floating member provided on the second member and floating the second member above the first surface;
a moving device including an actuator that moves a moving member along a guide extending in a second direction intersecting the first direction;
a connecting member connecting the moving member and the second member;
The rigidity of the connecting member in the first direction is lower than the rigidity in a direction parallel to the second surface,
The moving member moves in the second direction while contacting the guide.
Mobile device.
前記第1面から第1方向に離れた少なくとも第2面内で移動可能に設けられる第2部材と、
前記第2部材に設けられ、前記第2部材を前記第1面上に浮上させる浮上部材と、
前記第1方向と交差する第2方向に延びたガイドに沿って移動部材を移動させるアクチュエータを備える移動装置と、
前記移動部材と前記第2部材とを連結する連結部材と
を備え、
前記連結部材の前記第1方向に関する剛性は、前記第2面と平行な方向に関する剛性よりも低く、
前記連結部材のうち前記第2部材に連結される第1部分と前記連結部材のうち前記移動部材に連結される第2部分とは、前記第1方向に関して別々に移動可能である
移動体装置。 a first member having a first surface;
a second member that is movable within at least a second surface that is spaced from the first surface in a first direction;
a floating member provided on the second member and floating the second member above the first surface;
a moving device including an actuator that moves a moving member along a guide extending in a second direction intersecting the first direction;
a connecting member connecting the moving member and the second member;
Equipped with
The rigidity of the connecting member in the first direction is lower than the rigidity in a direction parallel to the second surface,
A first portion of the connecting member connected to the second member and a second portion of the connecting member connected to the movable member are movable separately in the first direction.
前記第1面から第1方向に離れた少なくとも第2面内で移動可能に設けられる第2部材と、
前記第2部材に設けられ、前記第2部材を前記第1面上に浮上させる浮上部材と、
前記第1方向と交差する第2方向に延びたガイドに沿って移動部材を移動させるアクチュエータを備える移動装置と、
前記移動部材と前記第2部材とを連結する連結部材と
を備え、
前記連結部材の前記第1方向に関する剛性は、前記第2面と平行な方向に関する剛性よりも低く、
前記移動部材は、前記第2方向に移動するときに前記第1方向に変位する
移動体装置。 a first member having a first surface;
a second member that is movable within at least a second surface that is spaced from the first surface in a first direction;
a floating member provided on the second member and floating the second member above the first surface;
a moving device including an actuator that moves a moving member along a guide extending in a second direction intersecting the first direction;
a connecting member connecting the moving member and the second member;
Equipped with
The rigidity of the connecting member in the first direction is lower than the rigidity in a direction parallel to the second surface,
The movable body device is configured such that the movable member is displaced in the first direction when moving in the second direction.
請求項1から3のいずれか一項に記載の移動体装置。 The movable body device according to any one of claims 1 to 3 , wherein the connecting member includes a plate-like member extending along the second surface or a plane parallel to the second surface.
請求項1から4のいずれか一項に記載の移動体装置。 The mobile device according to any one of claims 1 to 4 , wherein the connecting member includes an elastic member that is an elastic body.
前記移動部材は、第1移動部材であり、
前記第1及び第2方向と交差する第3方向に移動する第2移動部材を有する第2移動装置を更に備える
請求項1から5のいずれか一項に記載の移動体装置。 The mobile device is a first mobile device,
The moving member is a first moving member,
Further comprising a second moving device having a second moving member that moves in a third direction intersecting the first and second directions.
The mobile device according to any one of claims 1 to 5 .
前記第2移動装置は、前記第3方向に長手方向を有する
請求項6に記載の移動体装置。 The first moving device has a longitudinal direction in the second direction,
The mobile device according to claim 6 , wherein the second moving device has a longitudinal direction in the third direction.
請求項6又は7に記載の移動体装置。 The moving body device according to claim 6 or 7 , wherein the first moving device is located on the second moving device.
請求項6から8のいずれか一項に記載の移動体装置。 The movable body device according to any one of claims 6 to 8 , wherein the second moving device is arranged on the first member.
請求項6から9のいずれか一項に記載の移動体装置。 The mobile device according to any one of claims 6 to 9 , wherein the first and second moving devices are arranged between the first and second members.
前記第1及び第2移動装置は、前記第2部材の前記部位と前記第1面との間に配置される
請求項6から10のいずれか一項に記載の移動体装置。 The second member includes a portion facing toward the first surface of the first member and away from the first surface,
The movable body device according to any one of claims 6 to 10 , wherein the first and second moving devices are arranged between the portion of the second member and the first surface.
前記第2移動装置は、前記第1および第2浮上部材の間に配置される
請求項6から11のいずれか一項に記載の移動体装置。 The floating member includes a first floating member and a second floating member,
The mobile device according to any one of claims 6 to 11 , wherein the second moving device is arranged between the first and second floating members.
前記第1移動装置は、前記第1及び第3浮上部材の間に配置される
請求項6から12のいずれか一項に記載の移動体装置。 The floating member further includes a third floating member,
The mobile device according to any one of claims 6 to 12 , wherein the first moving device is arranged between the first and third floating members.
請求項1から13のいずれか一項に記載の移動体装置。 The mobile device according to any one of claims 1 to 13 , wherein the connecting member is arranged between the second member and the first surface.
請求項1から14のいずれか一項に記載の移動体装置。 The moving body device according to any one of claims 1 to 14 , wherein the moving device is arranged between the first and second members.
前記移動装置は、前記第2部材の前記部位と前記第1面との間に配置される
請求項1から15のいずれか一項に記載の移動体装置。 The second member includes a portion facing toward the first surface of the first member and away from the first surface,
The moving body device according to any one of claims 1 to 15 , wherein the moving device is arranged between the portion of the second member and the first surface.
前記移動装置は、前記第1および第2浮上部材の間に配置される
請求項1から16のいずれか一項に記載の移動体装置。 The floating member includes a first floating member and a second floating member,
The moving body device according to any one of claims 1 to 16 , wherein the moving device is arranged between the first and second floating members.
前記移動体装置の前記第2部材上に載置される物体を加工する加工装置と
を備える加工システム。 A mobile device according to any one of claims 1 to 17 ,
A processing system comprising: a processing device that processes an object placed on the second member of the mobile device.
前記移動部材を静止させた状態で、前記第2部材に載置された前記物体上で前記エネルギビームの照射位置を移動することにより前記物体上の第1領域を加工し、
前記第1領域の加工完了後、前記移動部材の移動により前記第2部材を前記第1面上で前記第1方向と交差する方向に移動し、
前記移動部材の移動後に、前記移動部材を静止させた状態で、前記第2部材に載置された前記物体上で前記エネルギビームの照射位置を移動することにより前記物体上の第2領域を加工する
請求項18に記載の加工システム。 The processing device processes the object by irradiating the object with an energy beam,
Processing a first region on the object by moving the irradiation position of the energy beam on the object placed on the second member while the moving member is stationary;
After the processing of the first region is completed, the second member is moved on the first surface in a direction intersecting the first direction by movement of the moving member,
After the movable member is moved, a second region on the object is processed by moving the irradiation position of the energy beam on the object placed on the second member while the movable member is kept stationary. The processing system according to claim 18 .
前記物体の計測後、前記移動部材の移動により前記第2部材を前記第1面上で、前記第1方向と交差する方向に移動し、
前記移動部材の移動後に、前記計測装置の計測結果に基づいて、前記加工装置で前記物体を加工する
請求項18又は19に記載の加工システム。 measuring the object placed on the second member with the measuring device;
After measuring the object, moving the second member on the first surface by moving the moving member in a direction intersecting the first direction,
The processing system according to claim 18 or 19 , wherein the processing device processes the object based on the measurement result of the measurement device after the moving member moves.
前記移動部材は、前記第1部材とは異なるガイド部材上で移動する
請求項18から20のいずれか一項に記載の加工システム。 The second member moves on the first surface in a direction intersecting the first direction, using the first surface as a guide surface,
The processing system according to any one of claims 18 to 20 , wherein the moving member moves on a guide member different from the first member.
請求項18から21のいずれか一項に記載の加工システム。 The processing system according to any one of claims 18 to 21 , wherein the moving device does not control the position of the moving member in the first direction.
前記連結部材と前記ガスベアリングにより、前記第2部材と前記第1面との位置関係を維持する
請求項18から22のいずれか一項に記載の加工システム。 The floating member forms a gas bearing between the floating member and the first surface,
The processing system according to any one of claims 18 to 22 , wherein the connecting member and the gas bearing maintain a positional relationship between the second member and the first surface.
前記加工装置は、前記物体に前記エネルギビームを照射する照射光学装置を備える
請求項18から23のいずれか一項に記載の加工システム。 The processing device processes the object by irradiating the object with an energy beam,
The processing system according to any one of claims 18 to 23 , wherein the processing device includes an irradiation optical device that irradiates the object with the energy beam.
請求項18から24のいずれか一項に記載の加工システム。 The processing system according to any one of claims 18 to 24 , wherein the object is placed on the second member without applying any external force.
請求項18から25のいずれか一項に記載の加工システム。 The processing system according to any one of claims 18 to 25 , further comprising a measuring device that measures a part of the object processed by the processing device.
請求項26に記載の加工システム。 The processing system according to claim 26 , wherein the measuring device measures the position of the surface of the object with respect to the first direction.
請求項27に記載の加工システム。 The processing system according to claim 27 , wherein the measuring device measures at multiple locations within a plane parallel to the first surface.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2019/034507 WO2021044505A1 (en) | 2019-09-03 | 2019-09-03 | Object transfer apparatus and processing system |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2021044505A1 JPWO2021044505A1 (en) | 2021-03-11 |
| JPWO2021044505A5 JPWO2021044505A5 (en) | 2022-05-10 |
| JP7435613B2 true JP7435613B2 (en) | 2024-02-21 |
Family
ID=74851984
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021543829A Active JP7435613B2 (en) | 2019-09-03 | 2019-09-03 | Mobile equipment and processing systems |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7435613B2 (en) |
| WO (1) | WO2021044505A1 (en) |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007266585A (en) | 2006-03-02 | 2007-10-11 | Sumitomo Heavy Ind Ltd | Stage apparatus |
| JP2015196222A (en) | 2014-04-01 | 2015-11-09 | 日本精工株式会社 | Table device, and carrying device |
| JP2015204317A (en) | 2014-04-11 | 2015-11-16 | 株式会社ニコン | Mobile body device, exposure equipment, and device manufacturing method |
| JP2015232718A (en) | 2009-08-20 | 2015-12-24 | 株式会社ニコン | Object processing apparatus, exposure apparatus and exposure method, and device manufacturing method |
| JP2016002610A (en) | 2014-06-16 | 2016-01-12 | トヨタ自動車株式会社 | Stage device |
| JP2016026881A (en) | 2014-06-23 | 2016-02-18 | 三菱電機株式会社 | Laser beam machining device |
| JP2016166924A (en) | 2015-03-09 | 2016-09-15 | 株式会社ニューフレアテクノロジー | Stage equipment |
| WO2017099087A1 (en) | 2015-12-07 | 2017-06-15 | 株式会社ニコン | Exposure device, exposure device control method, and device manufacturing method |
-
2019
- 2019-09-03 JP JP2021543829A patent/JP7435613B2/en active Active
- 2019-09-03 WO PCT/JP2019/034507 patent/WO2021044505A1/en active Application Filing
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007266585A (en) | 2006-03-02 | 2007-10-11 | Sumitomo Heavy Ind Ltd | Stage apparatus |
| JP2015232718A (en) | 2009-08-20 | 2015-12-24 | 株式会社ニコン | Object processing apparatus, exposure apparatus and exposure method, and device manufacturing method |
| JP2015196222A (en) | 2014-04-01 | 2015-11-09 | 日本精工株式会社 | Table device, and carrying device |
| JP2015204317A (en) | 2014-04-11 | 2015-11-16 | 株式会社ニコン | Mobile body device, exposure equipment, and device manufacturing method |
| JP2016002610A (en) | 2014-06-16 | 2016-01-12 | トヨタ自動車株式会社 | Stage device |
| JP2016026881A (en) | 2014-06-23 | 2016-02-18 | 三菱電機株式会社 | Laser beam machining device |
| JP2016166924A (en) | 2015-03-09 | 2016-09-15 | 株式会社ニューフレアテクノロジー | Stage equipment |
| WO2017099087A1 (en) | 2015-12-07 | 2017-06-15 | 株式会社ニコン | Exposure device, exposure device control method, and device manufacturing method |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2021044505A1 (en) | 2021-03-11 |
| WO2021044505A1 (en) | 2021-03-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7235054B2 (en) | Machining system and machining method | |
| JP2024045133A (en) | processing equipment | |
| JP2024026496A (en) | Processing systems and robot systems | |
| JP7435613B2 (en) | Mobile equipment and processing systems | |
| JP7310829B2 (en) | Machining system and machining method | |
| JP7435626B2 (en) | Beam processing equipment | |
| WO2021245861A1 (en) | Processing apparatus | |
| JP7468614B2 (en) | Processing System | |
| WO2021210104A1 (en) | Processing system and measurement member | |
| JP7035558B2 (en) | Rider device | |
| WO2021220477A1 (en) | Processing system | |
| WO2023233514A1 (en) | Processing system | |
| JPH01162235A (en) | Optical head | |
| WO2023228401A1 (en) | Machining system | |
| JP7475952B2 (en) | Laser processing head and laser processing device | |
| WO2021220456A1 (en) | Processing system | |
| JP2004206760A (en) | Optical head | |
| WO2020090915A1 (en) | Laser machining device | |
| CN117940735A (en) | Movement error calculation system, machine tool, calculation device, calibration method, and optical measurement device | |
| KR20230002363A (en) | Laser processing head and laser processing device | |
| JP2005121447A (en) | Autocollimator | |
| JPH06180847A (en) | Device for detecting objective lens displacement | |
| US20090141613A1 (en) | Hologram apparatus | |
| JP2009098129A (en) | Beam irradiation apparatus | |
| JPH02148419A (en) | Optical head |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220225 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230328 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20230526 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230713 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20231003 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231206 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20231218 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240109 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240122 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7435613 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |