JP7421040B2 - 制御装置及び復帰処理方法 - Google Patents
制御装置及び復帰処理方法 Download PDFInfo
- Publication number
- JP7421040B2 JP7421040B2 JP2022513736A JP2022513736A JP7421040B2 JP 7421040 B2 JP7421040 B2 JP 7421040B2 JP 2022513736 A JP2022513736 A JP 2022513736A JP 2022513736 A JP2022513736 A JP 2022513736A JP 7421040 B2 JP7421040 B2 JP 7421040B2
- Authority
- JP
- Japan
- Prior art keywords
- value
- measured value
- control
- control device
- change rate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000011084 recovery Methods 0.000 title claims description 21
- 238000003672 processing method Methods 0.000 title claims description 8
- 238000000034 method Methods 0.000 claims description 30
- 230000005856 abnormality Effects 0.000 claims description 6
- 238000010586 diagram Methods 0.000 description 6
- 238000005259 measurement Methods 0.000 description 2
- 238000011112 process operation Methods 0.000 description 2
- 238000009529 body temperature measurement Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D23/00—Control of temperature
- G05D23/19—Control of temperature characterised by the use of electric means
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Feedback Control In General (AREA)
Description
このような復帰処理に関する従来技術が、特許文献1によって開示されている。
特許文献1は、分析装置における温度制御であり、制御対象が決まっているものと考えられる。このような場合、上記処理を行うための“一定のしきい値”である目標値と測定値との差の基準値については、随時の変更は必要ないと言える。
しかしながら、例えば制御対象が変更されるような装置の場合、“一定のしきい値”を、制御対象の特性を考慮して適宜設定する必要がある。例えば、制御対象の熱容量の大小等の相違により、停電時間が同じであっても低下する温度は異なることになるため、これを考慮して“一定のしきい値”を決める必要がある。
このように、制御対象の変更等に応じて、初期条件での制御と再起動条件での制御を切り替えるための基準値の設定変更を手動でしなければならない点は、ユーザーにとって煩雑なものであった。
制御対象を、測定値と目標値に基づいて制御する制御装置であって、停電などの電源異常からの復帰処理として、復帰時の測定値と目標値の差分が動作切替基準値を超えた場合には初期条件での制御処理を行い、復帰時の測定値と目標値の差分が動作切替基準値以下であった場合には再起動条件での制御処理を行う復帰処理部を備え、前記動作切替基準値が、前記制御対象の測定値変化率に基準時間を乗じた値であることを特徴とする制御装置。
操作量を変化させた際の測定値の単位時間当たりの変化量に基づいて前記測定値変化率を取得する測定値変化率取得部を備えることを特徴とする構成1に記載の制御装置。
前記測定値変化率の取得処理を、操作量を最大から最小にした際の測定値の単位時間当たりの変化量に基づいて行う、又は、操作量を最小から最大にした際の測定値の単位時間当たりの変化量に基づいて行うことを特徴とする構成2に記載の制御装置。
前記操作量を最大から最小にした際の測定値の単位時間当たりの変化量と、前記操作量を最小から最大にした際の測定値の単位時間当たりの変化量と、の平均値に基づいて、前記測定値変化率の取得処理を行うことを特徴とする構成3に記載の制御装置。
前記測定値変化率の取得処理を、操作量が定常状態である状態から操作量を最小にした際の測定値の単位時間当たりの変化量に基づいて行うことを特徴とする構成2に記載の制御装置。
操作量を変化させた際の測定値の単位時間当たりの変化量の最大値を取得し、当該最大値に基づいて前記測定値変化率を取得することを特徴とする構成2から5の何れかに記載の制御装置。
前記制御対象を測定値と目標値に基づいて制御する処理がPI制御又はPID制御によって行われ、前記測定値変化率の取得処理が、PI定数又はPID定数を決めるオートチューニング処理時に行われることを特徴とする構成2から4の何れかに記載の制御装置。
前記動作切替基準値に、比例制御の比例帯に係数をかけた上限値が設定されていることを特徴とする構成7に記載の制御装置。
前記動作切替基準値が、前記制御対象の測定値変化率に、基準時間から無駄時間を減算したものを乗じた値であることを特徴とする構成1から8の何れかに記載の制御装置。
前記基準時間が入力される入力部を備えることを特徴とする構成1から9の何れかに記載の制御装置。
電源異常からの復帰時の測定値と目標値の差分が動作切替基準値を超えた場合には初期条件での制御処理を行い、電源異常からの復帰時の測定値と目標値の差分が動作切替基準値以下であった場合には再起動条件での制御処理を行う、停電などの電源異常からの復帰処理方法であって、前記動作切替基準値が、制御対象の測定値変化率に基準時間を乗じた値であることを特徴とする復帰処理方法。
本実施形態の温度制御装置1は、制御対象2の温度を制御するための装置であり、ここではヒータ21によって加熱される温度制御対象22の温度を制御するものを例として説明する。
温度制御装置1は、目標値SVと制御対象の測定値PVの偏差に基づくPID制御によって、制御対象2の温度を制御するものであり、停電などの電源異常からの復帰処理として、復帰時の測定値と目標値の差分に応じて、初期条件での制御処理と再起動条件での制御処理を切り替えるものである。“制御対象の測定値”とは、温度測定部23によって測定される温度制御対象22の温度情報である。
温度制御装置1は、その大まかな構成として、演算部11と、記憶部12と、入力部13を備えている。
停電などの電源異常からの復帰処理として、復帰時の測定値と目標値の差分が動作切替基準値を超えた場合には初期条件での制御処理を行い、復帰時の測定値と目標値の差分が動作切替基準値以下であった場合には再起動条件での制御処理を行わせる復帰処理部111と、
操作量を変化させた際の測定値の単位時間当たりの変化量に基づいて測定値変化率を取得する測定値変化率取得部112と、
目標値SVと制御対象の測定値PVの偏差に基づくPID演算による操作量の算出処理を行うPID演算部113と、
PID演算のためのPID定数の算出を行うオートチューニング部114と、
を備えている。
なお、図1では機能ごとに構成を分けて記載しているが、必ずしもハード的にこれらの構成に分かれていることを示すものではなく、例えば、演算部11がPLC、MCU、マイコン等の周知のデバイスを用いて構成されて各構成がソフトウェア的に実装されるものであってもよい。以下で説明するように、本実施形態では各構成がソフトウェア的に実装されるものを例としている。もちろん各構成がハード的に構成されるものであってよく、例えばFPGA等を利用して構成されるものや、ASICなどによって専用のハードとして構成されるもの等であってもよい。
入力部13は、ユーザーによって設定される基準時間の入力を受けるものであり、例えば、ユーザーが設定作業を行う操作部や、外部装置からデータの入力を受ける受信部等によって構成される。
以下、当該特徴に関する温度制御装置1の処理動作について、図3、4のフローチャートを参照しつつ説明する。
なお、図3、4の処理は、必要に応じて記憶部12にデータを読み書きしつつ、演算部11によって実行されるものである。即ち、ここでは、復帰処理部111、測定値変化率取得部112、PID演算部113、オートチューニング部114が、ソフトウェア的に実装されるものを例としている。
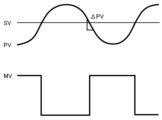
オートチューニングは、PID定数を算出するために行われる処理であり、図2に示されるように、測定値PVが目標値SVに至った時をトリガとして、操作量MVを最大(100%)と最小(0%)に切り替えて出力する処理が行われる(リミットサイクル法)。なお、オートチューニングについては、利用できる任意のオートチューニングを用いることができる。オートチューニング機能自体については、本発明と直接的に関係するものではないため、ここでのこれ以上の説明を省略する。
基準時間は、ユーザーによって設定される値であり、記憶部12に記憶されている。上限値Lは、本実施形態では比例制御の比例帯に基づく値を用いており、本実施形態では比例帯/10の値を上限値Lとしている。上限値Lは、演算部11によって、PID制御のための設定値である比例帯に対して係数を乗算して算出され、記憶部12に記憶されている。
一方、ΔPVmaxに基準時間を乗じた値が上限値Lを超えている場合には、上限値であるLを動作切替基準値Sとして記憶部12に記憶する(ステップ302:Yes→ステップ304)。即ち、動作切替基準値Sには、比例制御の比例帯に係数をかけた上限値が設定される。動作切替基準値Sが大きくなり過ぎるのは適当でないため、上限値を設けているものである。動作切替基準値Sが大きくなり過ぎると、再起動条件を使用することが適当でない場合にまで再起動条件にて制御が行われてしまうことになるため、これを防止するものである。比例帯に係数をかけた値を上限値Lとして用いることで、制御対象に応じて変動する上限値とすることができ、好ましい。
目標値SVと測定値PVの偏差が動作切替基準値S以下であった場合には、再起動条件でのPID制御を行い(ステップ401:Yes→ステップ402)、目標値SVと測定値PVの偏差が動作切替基準値Sを超えてた場合には、初期条件でのPID制御を行う(ステップ401:No→ステップ403)。
“再起動条件”とは、より早く制御対象を目標温度で安定させるための制御条件であり、例えば、PI制御やPID制御における積分出力を所定値に設定するものである。本実施形態では、各制御サイクルで使用される制御出力を更新、保持(記憶)しており、ステップ402では、停電発生時(停電直前)に使用していた制御出力と同等の出力となるように、目標値SVと制御対象の測定値PVの偏差に基づく出力を基に積分出力を設定しPID制御を行うものである。より具体的には、1.「停電が発生する直前に保持していた制御出力」と2.「現在の目標値SVと制御対象の測定値PVの偏差に基づく出力(比例出力)」から、3.「積分出力」を演算し、設定する。1=2+3となるように積分値を決めるものである。
一方、“初期条件でのPID制御”では、積分出力をゼロにしてPID制御を行うものとなる。 ここでは制御出力を保持(記憶)しておくものを例としているが、積分出力を保持し、その値を所定値に設定する構成でもよい。
ここでは、操作量が定常状態になっている状態において停電が起こった場合を例としており、再起動条件での制御への切り替えが無い場合に比べ、本実施形態のごとく再起動条件での制御への切り替えがある場合には、短い時間のうちに安定状態に復帰していることがわかる。
なお、目標値SVと測定値PVの偏差が図5で示される動作切替基準値Sの範囲を超えている場合には、再起動条件を使用することが適当でないため、初期条件での制御を行うようにしている(ステップ401:No→ステップ403)。
従って、ユーザーは、基準時間(どの程度の停電時間を基準とするか)の設定において、そのイメージを感覚的につかみやすい。なお、基準時間設定は、制御対象が変わる毎に設定変更する必要はない(勿論、変更するものであってもよい)。
例えば、上記“操作量を最大から最小にした際の測定値の単位時間当たりの変化量”と“操作量を最小から最大にした際の測定値の単位時間当たりの変化量”をそれぞれ複数取得し、これらの絶対値の平均値を測定値変化率とするものや、“操作量を最大から最小にした際の測定値の単位時間当たりの変化量”と“操作量を最小から最大にした際の測定値の単位時間当たりの変化量”の絶対値のそれぞれの最大値の平均値を測定値変化率としてもよい。
例えば、通常の温度制御処理において、操作量MVを変化させた際に、測定値PVの単位時間当たりの変化量を取得し、これを測定値変化率として設定するようにしてよい。このようなものの具体例の一つとして、通常の温度制御処理において、温度制御の終了に伴い、定常状態から操作量MVを最小にした際に、測定値PVの単位時間当たりの変化量を取得し、これを測定値変化率として設定するようにしてもよい。このように、定常状態から操作量MVを最小にした際の測定値PVの単位時間当たりの変化量を測定値変化率とすることにより、図5で示したような定常状態における停電の発生に対して、より適切な値を設定することができる。
また、“再起動条件”として、再起動後のPID制御の積分出力を、停電発生時に使用していた値で開始するものを例としているが、本発明をこれに限るものではない。例えば、特許文献1で開示されている方法を用いるようなものであってよい。“再起動条件”はそれぞれの制御方法の違い等に応じて、適宜定められるものであってよい。
また、数値の比較処理において、“以上”であるか“超える”であるか、及び“未満”であるか“以下”であるか等の違いは、本発明の基本的な概念に相違を与えるものではない。
11...演算部
111...復帰処理部
112...測定値変化率取得部
113...PID演算部
114...オートチューニング部
12...記憶部
13...入力部
2...制御対象
Claims (10)
- 制御対象を、測定値と目標値に基づいて制御する制御装置であって、
停電などの電源異常からの復帰処理として、復帰時の測定値と目標値の差分が動作切替基準値を超えた場合には初期条件での制御処理を行い、復帰時の測定値と目標値の差分が動作切替基準値以下であった場合には再起動条件での制御処理を行う復帰処理部を備え、
前記動作切替基準値が、前記制御対象の測定値変化率に、ユーザによって設定された基準時間を乗じた値であり、
前記制御対象を測定値と目標値に基づいて制御する処理がPI制御又はPID制御によって行われ、前記測定値変化率の取得処理が、PI定数又はPID定数を決めるオートチューニング処理時に行われることを特徴とする制御装置。 - 操作量を変化させた際の測定値の単位時間当たりの変化量に基づいて前記測定値変化率を取得する測定値変化率取得部を備えることを特徴とする請求項1に記載の制御装置。
- 前記測定値変化率の取得処理を、操作量を最大から最小にした際の測定値の単位時間当たりの変化量に基づいて行う、又は、操作量を最小から最大にした際の測定値の単位時間当たりの変化量に基づいて行うことを特徴とする請求項2に記載の制御装置。
- 前記操作量を最大から最小にした際の測定値の単位時間当たりの変化量と、前記操作量を最小から最大にした際の測定値の単位時間当たりの変化量と、の平均値に基づいて、前記測定値変化率の取得処理を行うことを特徴とする請求項3に記載の制御装置。
- 前記測定値変化率の取得処理を、操作量が定常状態である状態から操作量を最小にした際の測定値の単位時間当たりの変化量に基づいて行うことを特徴とする請求項2に記載の制御装置。
- 操作量を変化させた際の測定値の単位時間当たりの変化量の最大値を取得し、当該最大値に基づいて前記測定値変化率を取得することを特徴とする請求項2から5の何れかに記載の制御装置。
- 前記動作切替基準値に、比例制御の比例帯に係数をかけた上限値が設定されていることを特徴とする請求項1から6の何れかに記載の制御装置。
- 前記動作切替基準値が、前記制御対象の測定値変化率に、基準時間から無駄時間を減算したものを乗じた値であることを特徴とする請求項1から7の何れかに記載の制御装置。
- 前記基準時間が入力される入力部を備えることを特徴とする請求項1から8の何れかに記載の制御装置。
- 電源異常からの復帰時の測定値と目標値の差分が動作切替基準値を超えた場合には初期条件での制御処理を行い、電源異常からの復帰時の測定値と目標値の差分が動作切替基準値以下であった場合には再起動条件での制御処理を行う、停電などの電源異常からの復帰処理方法であって、
前記動作切替基準値が、制御対象の測定値変化率に、ユーザによって設定された基準時間を乗じた値であり、
前記制御対象を測定値と目標値に基づいて制御する処理がPI制御又はPID制御によって行われ、前記測定値変化率の取得処理が、PI定数又はPID定数を決めるオートチューニング処理時に行われることを特徴とする復帰処理方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2020/015642 WO2021205534A1 (ja) | 2020-04-07 | 2020-04-07 | 制御装置及び復帰処理方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2021205534A1 JPWO2021205534A1 (ja) | 2021-10-14 |
| JP7421040B2 true JP7421040B2 (ja) | 2024-01-24 |
Family
ID=78023010
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022513736A Active JP7421040B2 (ja) | 2020-04-07 | 2020-04-07 | 制御装置及び復帰処理方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7421040B2 (ja) |
| WO (1) | WO2021205534A1 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20070080235A1 (en) | 2005-10-07 | 2007-04-12 | Ace Glass Incorporated | Temperature controller backup device |
| JP2015090605A (ja) | 2013-11-06 | 2015-05-11 | 東ソー株式会社 | 温調可能な分析装置 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2503543Y2 (ja) * | 1989-01-23 | 1996-07-03 | オムロン株式会社 | 温度調節器 |
| JPH0359706A (ja) * | 1989-07-28 | 1991-03-14 | Kyocera Corp | 被加熱体の温度制御方式 |
| JP3275316B2 (ja) * | 1991-03-18 | 2002-04-15 | オムロン株式会社 | 制御システム |
| JPH05341801A (ja) * | 1992-06-09 | 1993-12-24 | Yokogawa Electric Corp | 調節計 |
-
2020
- 2020-04-07 WO PCT/JP2020/015642 patent/WO2021205534A1/ja active Application Filing
- 2020-04-07 JP JP2022513736A patent/JP7421040B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20070080235A1 (en) | 2005-10-07 | 2007-04-12 | Ace Glass Incorporated | Temperature controller backup device |
| JP2015090605A (ja) | 2013-11-06 | 2015-05-11 | 東ソー株式会社 | 温調可能な分析装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2021205534A1 (ja) | 2021-10-14 |
| JPWO2021205534A1 (ja) | 2021-10-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5627106B2 (ja) | 制御装置および制御方法 | |
| JP2003216202A (ja) | Pid選択機能を備えた調節計 | |
| JPH07191710A (ja) | コントローラ | |
| US6959219B2 (en) | Control apparatus having a limit cycle auto-tuning function | |
| CN107196581B (zh) | 用于微调伺服马达的控制装置、方法及计算机可读介质 | |
| US20140121853A1 (en) | Feedback control method, feedback control apparatus, and feedback control program | |
| JP6974143B2 (ja) | 制御装置および制御方法 | |
| JP7421040B2 (ja) | 制御装置及び復帰処理方法 | |
| TW201640239A (zh) | 控制裝置及控制方法 | |
| US7668606B2 (en) | Control device for controlling a control object at a ratio of on-time to off-time for a time-proportional output | |
| US7092770B2 (en) | Feedback control method and feedback control device | |
| JP4974242B2 (ja) | パラメータ調整装置および調整方法 | |
| JP7388849B2 (ja) | 制御パラメータ調整装置および方法 | |
| JP7388848B2 (ja) | 制御パラメータ調整装置および方法 | |
| JP6248764B2 (ja) | ボイラシステム | |
| JP2020021298A (ja) | 制御装置および制御方法 | |
| JP6751244B2 (ja) | オートチューニング装置 | |
| JP2017062542A (ja) | 制御装置および制御方法 | |
| JP6417175B2 (ja) | 評価装置および評価方法 | |
| JP2007264720A (ja) | 状態判定装置および状態判定方法 | |
| US20230405700A1 (en) | Control device, non-transitory computer-readable storage medium, and control method | |
| JP2004126733A (ja) | 調節計 | |
| JP2023181975A (ja) | 制御装置、プログラム、及び制御方法 | |
| JP6974131B2 (ja) | 推定装置および方法 | |
| WO2022034658A1 (ja) | 制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220524 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230718 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230822 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20231121 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20231215 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7421040 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |