以下、図1~図10Cを参照して、本発明の実施形態について説明する。本実施形態に係るアームレスト装置は、車室内に配置された車両用シートに対し適用される。本実施形態では、車両用シートを有する車両が、自動運転機能を有する自動運転車両として構成される。なお、自動運転車両は、ドライバによる運転操作が不要な自動運転モードでの走行だけでなく、ドライバの運転操作による手動運転モードでの走行も可能である。
自動運転車両は、車両制御システムにより走行動作が制御される。自動運転モードにおいて、車両制御システムは、GPS受信機等により測定された自車両の現在位置と、カメラ、レーダ(RADAR)、ライダ(LIDAR)等により検出された自車両の周囲の状況とに基づいて、予め入力された目的地に至るまでの目標車速、目標加速度を含む走行ルートを決定する。そして、走行ルートに従って車両が走行するように走行用アクチュエータをドライバの操作によらずに自動的に制御する。一方、手動運転モードにおいては、車両制御システムは、ドライバによるアクセルペダル、ブレーキペダル、ステアリングホイール等の操作に応じて走行用アクチュエータを制御する。走行用アクチュエータには、例えばスロットルバルブの開度を変更するスロットル用アクチュエータ、変速機の変速比を変更する変速機用アクチュエータ、制動装置を作動するブレーキ用アクチュエータ、転舵装置を作動する操舵用アクチュエータなどが含まれる。
車両制御システムは、自動運転モード時の自動運転レベルを指令する運転レベル指令スイッチを有する。自動運転レベルとは、どの程度まで運転を自動化するかの指標である。自動運転レベルは、例えばSAEインターナショナルにより定められたSAEJ3016に基づきレベル0~レベル5に分類される。具体的には、レベル0は、自動化なしの運転レベルであり、レベル0では、全ての運転操作を人間(ドライバ)が行う。
レベル1は、加速、操舵および制動のいずれかの操作をシステムが行う運転レベル(運転支援)である。すなわち、レベル1では、特定の条件下で、アクセル、ブレーキ、ハンドルのいずれかの操作を車両制御システムが周囲の状況に応じて制御し、それ以外の全ての運転操作を人間が行う。レベル2は、加速、操舵および制動のうち複数の操作を一度にシステムが行う運転レベル(部分運転自動化)である。レベル2までは、人間に周囲の監視義務がある。
レベル3は、加速、操作および制動の全てを車両制御システムが行い、車両制御システムが要請したときのみドライバが対応する運転レベル(条件付き自動運転)である。レベル3以降では、車両制御システムが周囲を監視し、人間に周囲の監視義務はない。レベル4は、特定の状況で、車両制御システムが全ての運転操作を行い、車両制御システムが運転を継続できない場合でも人間は交代しなくてもよい運転レベル(高度自動運転)である。したがって、レベル4以降では、非常時であっても車両制御システムが対応する。レベル5は、全ての条件下で、車両制御システムが自律的に自動走行をする運転レベル(完全自動運転)である。
以上のように運転レベルを変更可能な自動運転車両に用いて好適なアームレスト装置について、以下説明する。
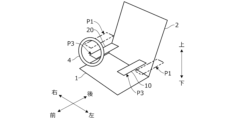
図1は、本発明の実施形態に係るアームレスト装置50が適用される車両用シート100(以下単にシートと呼ぶ)の構成を示す斜視図であり、特に手動運転モード時のシート100の構成を示す。以下では、便宜上、図示のようにシート100に着座する乗員を基準にして前後方向、左右方向および上下方向を定義し、この定義に従い各部の構成を説明する。シート100の前後方向、左右方向および上下方向は、車両200の前後方向(長さ方向)、左右方向(車幅方向)および上下方向(高さ方向)に一致する。図1では、車両右側の運転席用シート100を示し、運転席用シート100に適用されるアームレスト装置の構成を主に説明する。
図1に示すように、シート100は、乗員の臀部を支持するシートクッション1と、乗員の背部を支持するシートバック2と、シートバック2の上部に設けられ、乗員の頭部を支持するヘッドレスト3とを備える。シートクッション1は、前後方向および左右方向に延在し、全体が平面視略矩形状を呈する。シートバック2は、上下方向および左右方向に延在し、全体が正面視略矩形状を呈する。シートバック2は、シートクッション1の後端部に前後方向に傾動可能に支持される。
シートバック2の左側には、平面視略矩形状で前後方向細長に形成されたシートアームレスト10が設けられる。シートアームレスト10は、ベース部材13上に支持された上下一対の上板11および下板12を有する。ベース部材13は、前後方向に延在する略直方体形状を呈し、その後端部がシートバック2の左側面2aに固定される。シートアームレスト10は、本実施形態に係るアームレスト装置50の一部を構成する。
下板12は、その後端面がシートバック2の座面2bよりも前方に位置するようにベース部材13の前側上面に載置される。下板12は、ベース部材13に設けられた支持機構14を介して図1の初期位置から右方かつ上方に移動可能に支持される。下板12の後端面が座面2bよりも前方に位置するため、下板12はシートバック2と干渉せずに右方に移動可能である。なお、下板12をベース部材13の上面に沿って前方に移動可能に設け、下板12を前方に移動させた後に、右方かつ上方に移動させるようにしてもよい。この場合、下板12を前方に移動させる前の初期位置で、下板12の後端面が座面2bより後方に位置してもよい。
上板11は、下板12と左右方向同一幅を有し、下板12上に載置される。シートアームレスト10は、図1の初期位置に位置するとき、上板11の後端面が下板12の後面面と同一鉛直面上に位置する。したがって、上板11は、シートバック2と干渉することなく下板12と一体にベース部材13に対し右方かつ上方に移動可能である。上板11は、スライド機構15を介して下板12に対し前方に移動可能に支持され、上板11が前方に移動すると、上板11の後端部は下板12の後端部よりも前方に位置する。シートアームレスト10は、さらに上板11の前端部に回動可能に支持された略矩形状のテーブル16を備える。テーブル16は、図1の初期位置ではシート100の左側方に格納される。
シート100の右側には、開閉可能なドア110が設けられ、ドア110を介して乗員は車両200に乗降する。ドア110の内壁(側壁)111には、乗員が操作するドア開閉用のドアハンドル112と、ドアアームレスト20とが設けられる。図示は省略するが、内壁111には、ウインドウ113の開閉指令やドア110のロック装置の作動指令等を入力する操作スイッチと、ドア110を把持するドア把持部と、ドリンクホルダ等も設けられる。
ドアアームレスト20は、平面視略矩形状で前後方向細長に形成される。ドアアームレスト20は、ベース部材23上に支持された上下一対の上板21および下板22を有する。ベース部材23は、内壁111から車室内側に膨出して設けられ、内部に空洞が形成される。ドアアームレスト20は、本実施形態に係るアームレスト装置50の一部を構成する。
下板22は、その後端面がシートバック2の座面2bよりも前方に位置し、ベース部材23の上面に載置される。下板22は、ベース部材23に設けられた支持機構24を介して図1の初期位置から左方かつ上方に移動可能に支持される。下板22の後端面が座面2bよりも前方に位置するため、下板22はシートバック2と干渉せずに左方に移動可能である。なお、下板22がシートバック2と干渉せずに右方に移動可能であるとき、下板22の後端面が座面2bより後方に位置してもよい。
上板21は、下板22と左右方向同一幅を有し、下板22上に載置される。ドアアームレスト20は、図1の初期位置に位置するとき、上板21の後端面が下板22の後面面と同一鉛直面上に位置する。したがって、上板21は、シートバック2と干渉することなく、下22と一体に移動にベース部材23に対し左方かつ上方に移動可能である。上板21は、スライド機構25を介して下板22に対し前方に移動可能に支持され、上板21が前方に移動すると、上板21の後端部は下板22の後端部よりも前方に位置する。
図2は、ドアアームレスト20の支持構造を概略的に示す斜視図であり、図3は、図2のアームレスト20を左右方向に延在する鉛直面(図2のIII-III線)に沿って切断した断面図(横断面図)、図4は、前後方向に延在する鉛直面(図2のIV-IV線)に沿って切断した断面図(縦断面図)である。なお、図2~図4において、ベース部材23の図示は省略する。
図2~図4に示すように、支持機構24は、ベース部材23の内部空間に配置されたリンク機構を有する。リンク機構は、左右一対の棒状の前ロッド241,242と、左右一対の棒状の後ロッド243,244とを有する。これらのロッド241~244の長さは互いに等しく、かつこれらのロッド241~244は、互いに平行に設けられる。前ロッド241,242は側面視で互いに重なって位置し、後ロッド243,244も側面視で互いに重なって位置する。
下板22の底部には、前後方向に延在する左右一対の回転軸245,246が回転可能に支持される。ベース部材23の底部には、前後方向に延在する左右一対の回転軸247,248が回転可能に支持される。回転軸245~248は互いに平行に配置される。左側の前ロッド241および後ロッド243の上端部は、それぞれ回転軸245に相対回転可能に支持される。左側の前ロッド241のおよび後ロッド243の下端部は、それぞれ回転軸247に相対回転可能に支持される。右側の前ロッド242および後ロッド244の上端部は、それぞれ回転軸246に相対回転可能に支持される。
右側の前ロッド242および後ロッド244の下端部は、それぞれ回転軸248に固定される。回転軸248の端部には、電動モータなどのアクチュエータ31が設けられ、アクチュエータ31の駆動により回転軸248が回転し、回転軸248の回転に伴い右側の前ロッド242および後ロッド244が回転軸248を支点にして左右方向に回動する。
回転軸245から回転軸246までの距離および回転軸247から回転軸248までの距離は互いに等しい。このため、支持機構24は、左右一対の前ロッド241,242を2辺とする正面視平行四辺形リンクを構成するとともに、左右一対の後ロッド243,244を2辺とする正面視平行四辺形リンクを構成する。なお、ロッド241,243を共通の回転軸245,247により支持するとともに、ロッド242,244を共通の回転軸246,248により支持するのではなく、ロッド241,243を互いに別々の回転軸で支持するとともに、ロッド242,244を互いに別々の回転軸で支持してもよい。これにより回転軸の前後方向の長さを短くできる。
ドアアームレスト20が初期位置P1(図3の実線)に位置するときには、回転軸247よりも回転軸245の方が右方に位置し、回転軸248よりも回転軸246の方が右方に位置する。したがって、前ロッド241,242および後ロッド243,244は、それぞれ上方にかけて右方に傾斜して延在する。この状態からアクチュエータ31の駆動により、右側の前ロッド242および後ロッド244を例えば鉛直状態(図3の二点鎖線)になるまで矢印Aに示すように前方に回動すると、左側の前ロッド241および後ロッド243も同時に左方に回動する。その結果、ドアアームレスト20(上板21、下板22)が初期位置P1よりも左方かつ上方の内側位置P2(図3の二点鎖線)に移動する。
図2に示すように、ドアアームレスト20の上板21は、内側位置P2から下板22に対し前方に突出した前進位置P3に、スライド機構25を介し移動可能に構成される。図3に示すように、上板21の下面および下板22の上面は、それぞれ断面凹状に形成される。上板21は、前後方向に延在する左右一対の側板211,211を有し、下板22は、前後方向に延在する左右一対の側板221,221を有する。側板211,211は側板221,221の外側に、側板221,221に沿って前後方向に摺動可能に嵌合される。上板21の底面の凹部の中央部には下方に向けて突出部212が設けられる。突出部212は前後方向に延在し、その下端面に凹凸状のギア部213が形成される
ギア部213の下方には、ギア部213に噛合するようにピニオン222が配置される。下板22の凹部の上面には、電動モータなどのアクチュエータ32が固設され、ピニオン222の回転軸はアクチュエータ32により回転可能に支持される。ギア部213、ピニオン222、アクチュエータ32は、スライド機構25を構成する。
図4に示すように、ドアアームレスト20が初期位置P1(実線)から内側位置P2(二点鎖線)に移動した後、アクチュエータ32が回転駆動すると、上板21は、左右の側板211が左右の側板221にガイドされながら、矢印Bに示すように前方の前進位置P3(二点鎖線)に移動する。この状態では、ドアアームレスト20の前後方向の全長、すなわち下板22の後端面から上板21の前端面までの長さが長くなり、ドアアームレスト20が伸長する。
図示は省略するが、シート100の左側のシートアームレスト10の支持機構14およびスライド機構15は、ドアアームレスト20の支持機構24およびスライド機構25と同様に構成される。すなわち、シートアームレスト10(上板11、下板12)は、支持機構14を介して電動モータなどのアクチュエータの駆動により、ベース部材13に対し初期位置から右方かつ上方の内側位置に移動する。さらに、上板11は、スライド機構15を介して電動モータなどのアクチュエータの駆動により、下板12に対し内側位置から前方の前進位置に移動する。
図5は、シートアームレスト10の前端部に設けられる略矩形の板状のテーブル16の構成を示すシート100の側面図であり、図6は、平面図である。図5,6では、シートアームレスト10とドアアームレスト20とがシート100の前方に突出した前進位置P3に位置している。テーブル16は、上板11の前端部の回動機構17を介して回動可能である。
図5,6に示すように、シートアームレスト10の上板11の前端部には、保持板部161が設けられる。保持板部161の右側には回動部材162が配置され、回動部材162には、左方に向けて回動部材162と一体のピン162aが突設される。保持板部161には貫通孔が設けられ、貫通孔にピン162aが挿着される。ピン162aの端部には電動モータなどのアクチュエータ33が連結され、アクチュエータ33の駆動によりテーブル16は、ピン162aを支点に、図5の二点鎖線に示す、先端部がシートアームレスト10の下方に配置される位置(格納位置P4)と、図5の実線に示す、先端部がシートアームレスト10の上方に配置される位置(鉛直位置P5)との間で回動可能である。
テーブル16の基端部には、後方に向けてテーブル16と一体のピン16bが突設される。ピン16bは、回動部材162を貫通してその端部に電動モータなどのアクチュエータ34が連結され、アクチュエータ34の駆動によりテーブル16は、ピン16bを支点にして、図5の実線の鉛直位置P5と図6の水平位置P6との間で回動可能である。右側のドアアームレスト20には、テーブル16の右端部が載置される載置部165が設けられる。載置部165は、ドアアームレスト20の上板21の内側に収納可能である。
テーブル16は、ステアリングホイール4に沿って湾曲する湾曲部16aを有する。湾曲部16aは、テーブル16を図6の水平位置P6に回動させた際にステアリングホイール4と干渉しないように形成される逃げ部である。テーブル16を使用する際には、図5の格納位置P4に格納されたテーブル16を、矢印Aに示すようにピン162aを中心に鉛直位置P5に回動させた後、矢印Bに示すようにピン16bを中心に水平位置P6に回動させ、テーブル16の先端部をドアアームレスト20の載置部165に載置させる。なお、テーブル16を載置部で固定するロック機構を設けてもよい。
テーブル16の右端部を固定する載置部165を平面視板状に構成するとともに、載置部165を所定の回動角度で回動可能な構成としてもよい。例えば載置部165は、左右方向に延在する回動軸を介してドアアームレスト20に連結され、回動軸を中心に、所定の回動範囲で回動可能に設けられる。これにより、テーブル16を所定の角度に傾斜させることができるので、例えばシート100をリクライニングさせた状態のときに、テーブル16の角度を調整し、本やスマートフォン等の情報端末を乗員の見やすい位置に設定することができる。このため、自動運転状態における乗員の快適性を向上することができる。
本実施形態に係るアームレスト装置50は、以上のように構成されたアームレスト(シートアームレスト10とドアアームレスト20)を有し、アームレストは自動的に移動可能に構成される。図7は、本発明の実施形態に係るアームレスト装置50の制御構成を示すブロック図である。図7に示すように、アームレスト装置50は、アームレスト10,20の制御に係るコントローラ51と、CAN(Controller Area Network)等の車載ネットワークを介してそれぞれコントローラ51に接続された、手動自動切換スイッチ52と、運転レベル指令スイッチ53と、動作選択スイッチ54と、ドアアームレスト駆動用アクチュエータAC1と、シートアームレスト駆動用アクチュエータAC2と、テーブル駆動用アクチュエータAC3とを有する。
手動自動切換スイッチ52は、例えばドライバが手動操作可能なスイッチとして構成され、スイッチ操作に応じて、自動運転機能を有効化した自動運転モードまたは自動運転機能を無効化した手動運転モードへの切換指令を出力する。手動自動切換スイッチ52の操作によらず、所定の走行条件が成立したときに、手動運転モードから自動運転モードへの切換、あるいは自動運転モードから手動運転モードへの切換が指令されるようにしてもよい。すなわち、手動自動切換スイッチ52が自動的に切り換わることで、モード切換が手動ではなく自動で行われるようにしてもよい。
運転レベル指令スイッチ53は、例えばドライバが手動操作可能なスイッチとして構成され、スイッチの操作に応じてレベル0~5のいずれかの自動運転レベルが指令される。車両制御システムが周囲の状況等により自度運転が可能な条件が満たされているか否かを判定し、判定結果に応じて運転レベル指令スイッチ53を自動で切り換え、レベル0~5のいずれかを指令するように構成することもできる。
動作選択スイッチ54は、例えばドライバが手動操作可能なスイッチとして構成され、動作選択スイッチ54の操作に応じてアームレスト10,20の所定位置への変位の許可または禁止を指令する。例えばシートアームレスト10およびドアアームレスト20の初期位置P1からの変位の許可または禁止を指令する。シートアームレスト10が前進位置P3に変位した状態において、シートアームレスト10の一部であるテーブル16が格納位置P4から水平位置P6へ変位することの許可または禁止を指令するようにしてもよい。
ドアアームレスト駆動用アクチュエータAC1は、ドアアームレスト20を初期位置P1から前進位置P3へ駆動するためのアクチュエータである。具体的には、ドアアームレスト駆動用アクチュエータAC1は、支持機構24に設けられ、ドアアームレスト20をベース部材23の左方かつ上方に移動させるアクチュエータ31(例えば電動モータ)と、スライド機構25に設けられ、ドアアームレスト20の上板21を下板22に対し前進させるアクチュエータ32(例えば電動モータ)とを有する。
シートアームレスト駆動用アクチュエータAC2は、シートアームレスト10を初期位置P1から前進位置P3へ駆動するためのアクチュエータである。具体的には、シートアームレスト駆動用アクチュエータAC2は、支持機構14に設けられ、シートアームレスト10をベース部材13の右方かつ上方に移動させるアクチュエータ(例えば電動モータ)と、スライド機構15に設けられ、シートアームレスト10の上板11を下板12に対し前進させるアクチュエータ(例えば電動モータ)とを有する。
テーブル駆動用アクチュエータAC3は、テーブル16を格納位置P4から水平位置P6へ駆動するためのアクチュエータである。具体的には、テーブル駆動用アクチュエータAC3は、回動機構17に設けられ、回動部材162と一体のピン162aを回転駆動してテーブル16を格納位置P4から鉛直位置P5に回動させるアクチュエータ33(例えば電動モータ)と、テーブル16と一体のピン16bを回転駆動してテーブル16を鉛直位置P5から水平位置P6に回動させるアクチュエータ34(例えば電動モータ)とを有する。
コントローラ51は、電子制御回路(ECU)であり、動作回路としてのCPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)等の記憶部および入出力インタフェース(I/Oインタフェース)、その他の周辺回路を備えたマイクロコンピュータを含んで構成される。コントローラ51は、手動自動切換スイッチ52と運転レベル指令スイッチ53と動作選択スイッチ54とからの入力信号に基づいて所定の処理を実行し、アクチュエータAC1~AC3にそれぞれ制御信号を出力する。
図8は、予め記憶されたプログラムに従いコントローラ51で実行される処理の一例を示すフローチャートである。このフローチャートに示す処理は、例えば車両の電源キースイッチのオンにより開始される。
まず、ステップS1で、手動自動切換スイッチ52からの信号に基づいて運転モードが自動運転モードであるか否かを判定する。ステップS1で否定、すなわち手動運転モードであると判定されると、ステップS2に進み、アームレスト10,20を初期位置P1に位置するようにアクチュエータAC1~AC3を制御する。ステップS1で肯定されるとステップS3に進み、運転レベル指令スイッチ53からの信号に基づいて運転レベルが所定運転レベル以上であるか否かを判定する。所定運転レベルとしては、例えばレベル4が設定される。
ステップS3で肯定されると、ステップS5に進み、否定されるとステップS4に進む。ステップS4では、アームレスト10,20が前進位置P3に位置し、かつ、テーブル16が格納位置P4に位置するようにアクチュエータAC1~AC3を制御する。ステップS5では、動作選択スイッチ54からの信号に基づいてアームレスト10,20とテーブル16の動作禁止が指令されたか否かを判定する。ステップS5で肯定されるとステップS2に進み、否定されるとステップS6に進む。ステップS6では、アームレスト10,20が前進位置P3に位置し、かつ、テーブル16が水平位置P6に位置するようにアクチュエータAC1~AC3を制御する。
本実施形態に係るアームレスト装置50の動作をより具体的に説明する。図9A,9Bは、それぞれアームレスト装置50の動作の一例を示す斜視図である。手動運転モードで走行中は、シートアームレスト10とドアアームレスト20とは、それぞれ図9A,9Bの二点鎖線で示す初期位置P1にある(ステップS2)。
運転モードが自動運転モードに切り換わると、運転レベルに応じてアームレスト10,20の形態が変化する。例えば運転レベルがレベル3であるときは、図9Aに示すように、ドアアームレスト20は左方かつ上方かつ前方の前進位置P3に変位し、シートアームレスト10は右方かつ上方かつ前方の前進位置P3に変位する(ステップS4)。これによりドライバは、アームレスト10,20上に腕部を載置することで、ステアリングホイール4の近傍に手(指等)を配置することができる。これにより緊急時等に容易かつ迅速に対処することができる。
すなわち、レベル3の自動運転では、ドライバはステアリングホイール4から手を離してはいるものの、緊急時等に即座にステアリングホイール4を操作可能なようにステアリングホイール4の近傍に手を置いておく必要があり、このことがドライバにとって負担となりやすい。この点、アームレスト10,20の先端部を車両内側かつ前方かつ上方に変位させることで、ドライバはステアリングホイール4の近傍に手を配置することが容易であり、自動運転モード時のドライバの疲労を軽減することができる。
運転レベルがレベル4以上であるときは、図9Bに示すように、ドアアームレスト20は左方かつ上方かつ前方の前進位置P3に変位し、シートアームレスト10は右方かつ上方かつ前方の前進位置P3に変位する(ステップS4)。さらにドアアームレスト20の先端部のテーブル16が水平位置P6に変位する(ステップS6)。これによりドライバはアームレスト10,20上に腕を載置しつつテーブル16上に手や物を置いて、各種の作業などを行うことができる。
すなわち、レベル4の自動運転では、緊急時に車両制御システムが対応するため、ドライバは緊急時に備えてステアリングホイール4の近傍に手を配置する必要がない。したがって、仮に運転操作の妨げになる位置にテーブル16が置かれても問題はなく、ドライバはテーブル16を作業台や補助台などとして好適に用いることができる。テーブル16が配置されることで、自動運転時のドライバの快適性が向上する。テーブル16は左右両端部が左右のアームレスト10,20により支持されるため、剛性が高い。
レベル4の自動運転モードで走行中であっても、動作選択スイッチ54の操作によりドライバが動作禁止を選択しているときには、アームレスト10,20は初期位置P1に保持される(ステップS5→ステップS2)。このため、アームレスト10,20がシート100の内側に変位することはなく、ドライバは腕部をアームレスト10,20に置いてゆったりとした姿勢で乗車することができる。すなわち、レベル3の自動運転と異なりレベル4の自動運転では、ドライバ毎に所望の姿勢が異なるが、動作選択スイッチ54の操作に応じてドライバの好みでシートアームレスト10の動作を変更することで、ドライバは所望の姿勢を容易にとることができる。
本実施形態によれば以下のような作用効果を奏することができる。
(1)本実施形態に係るアームレスト装置50は、自動運転機能を有する自動運転車両のシート100に着座する乗員の腕部を支持するアームレスト10,20を備える。アームレスト(例えばシートアームレスト10)は、自動運転時において、その先端部が自動運転前の初期位置P1よりも前方かつシート幅方向内側の前進位置P3にある形態(第1形態と呼ぶ)と、アームレスト10の先端部であるテーブル16が水平位置P6に位置する形態(第2形態と呼ぶ)とに変更可能に構成される(図9A,9B)。このように自動運転時にアームレスト10が複数の形態をとりうることで、運転レベルに応じたアームレスト10の最適な動作が可能である。
(2)アームレスト(例えばシートアームレスト10)は、自動運転レベルが所定レベル(例えばレベル4)未満であるとき、第1形態に変更可能に構成され、自動運転レベルが所定レベル以上であるとき、第2形態に変更可能に構成される(図9A,9B)。自動運転車両は、自動運転時の運転レベルに応じてドライバに対する要求が異なることがあるが、本実施形態では運転レベルに応じてアームレストの形態を変更するので、例えば緊急時に備えて手をステアリングホイール4の近傍に配置する等、運転レベルに応じた要求をドライバは容易に満たすことができる。
(3)アームレスト装置50は、アームレスト(例えばシートアームレスト10)の先端部(上板11またはテーブル16の先端部)が第1形態に対応する前進位置P3または第2形態に対応する水平位置P6に変位するようにアームレスト10を移動可能に支持する支持部、すなわち支持機構14、スライド機構15、回動機構17をさらに備える(図1,5)。これによりアームレスト10の先端部の位置を、互いに異なる位置に容易に変位させることができる。
(4)アームレスト(例えばシートアームレスト10)は、その先端部が第1形態に対応する前進位置P3または第2形態に対応する水平位置P6に変位するように伸長可能に設けられる(図9A,9B)。これにより、第1形態および第2形態において、腕部や手を載置可能なアームレスト10の面積が拡大し、乗員の快適性が向上する。
(5)アームレスト(例えばシートアームレスト10)の先端部を前進位置P3または水平位置P6に変位させるアクチュエータAC1~AC3をさらに備える(図7)。これにより運転レベル等に応じてアームレスト10を自動的に動作させることができる。
(6)アームレスト10,20の前進位置P3は、さらに初期位置P1よりも上方の位置である(図9A)。このため、自動運転モードにおいてドライバの手をステアリングホイール4に容易に近づけることができる。
(7)アームレスト10,20は、シート100の左右両側に設けられ、左側のシートアームレスト10の先端部であるテーブル16が水平位置P6に位置し、右側のドアアームレスト20の先端部が前進位置P3に位置するとき、左右のアームレスト10,20同士が互いに連結されるように構成される(図9B)。これによりアームレスト全体の剛性を高めることができる。
(8)アームレスト10は、その先端部にシート100(シートバック2)の前方に形成されるテーブル16を備え、左右のアームレスト10,20同士は、テーブル16を介して互いに連結される(図6)。これによりテーブル16の剛性を高めることができ、テーブル16上に重量物を安定して載置することができる。
(9)アームレスト10,20の前進位置P3への変位の許可および禁止を指令する動作選択スイッチ54をさらに備える(図7)。これにより乗員の選択に応じてアームレスト10,20が変位するようになり、乗員毎の要求を容易に満たすことができ、乗員の快適性が向上する。
上記実施形態は種々の形態に変形することができる。以下、変形例について説明する。上記実施形態では、シートアームレスト10の先端部が初期位置P1から第1形態に対応する前進位置P3(第1位置)および第2形態に対応する水平位置P6(第2位置)に変位するようにしたが、自動運転時において、その先端部が自動運転前の初期位置よりも前方かつシート幅方向内側に位置する第1形態と、第1形態とはアームレストの先端部の位置が異なる第2形態とに変更可能に構成されるのであれば、アームレストの動作形態は上述したものに限らない。
図10Aはアームレスト装置の第1変形例を示す平面図である。図10Aでは、シートアームレスト10の代わりに、ドアアームレスト20の先端部に、回動機構17と同様の回動機構を介して格納位置から鉛直位置、水平位置へと回動可能なテーブル26が設けられる。図10Aは、レベル4以上でのアームレストの形態(第2形態)の一例を示しており、レベル3以下では、アームレストは例えば図9Aに示すのと同様の形態(第1形態)となる。図10Aに示すように、シートアームレスト10の先端部は前進位置P3に位置し、ドアアームレスト20の先端部のテーブル26は水平位置P6に位置する。このとき、シートアームレスト10の先端部から右方に突設された板状の載置部261上に、テーブル26が支持される。
図10Bは、アームレスト装置の第2変形例を示す平面図である。図10Bでは、シートアームレスト10の先端部およびドアアームレスト20の先端部に、それぞれ回動機構を介して格納位置から鉛直位置、水平位置へと回動可能なテーブル18,28が設けられる。図10Bは、レベル4以上でのアームレストの形態(第2形態)の一例を示しており、レベル3以下では、アームレストは例えば図9Aに示すのと同様の形態(第1形態)となる。図10Bに示すように、シートアームレスト10の先端部のテーブル18とドアアームレスト20の先端部のテーブル28はそれぞれ水平位置P6に位置する。このとき、テーブル18,28は互いに連結される。
図10Cは、アームレスト装置の第3変形例を示す平面図である。なお、図10Cはドアアームレスト20の上板21の位置を示し、シートアームレスト10の図示を省略する。シートアームレスト10は、例えばドアアームレスト20に対し左右対称に設けられる。図10Cでは、ドアアームレスト20の第1位置は、図9Bと同様、初期位置P1の前方かつ左方の前進位置P3(二点鎖線)である。一方、第2位置P7は、第1位置の前方かつ左方(実線)または前方かつ右方(実線)のいずれかである。この場合、第1位置(前進位置P3)と第2位置P7とは同一高さであっても異なる高さであってもよい。
なお、第1位置と第2位置とが、前後方向同一位置で、左右方向および上下方向の少なくともいずれかで異なる位置であってもよい。第1位置と第2位置とが、左右方向同一位置で、前後方向および上下方向の少なくともいずれかで異なる位置であってもよい。すなわち、第1位置と異なる位置であれば、第2位置はいずれの位置であってもよい。例えば第2位置が第1位置よりも後方や下方であってもよい。第2位置が初期位置P1と同一であってもよい。上記実施形態では、シートアームレスト10の先端部のテーブル16を水平位置P6に回動させて、前進位置P3(第1位置)と異なる水平位置P6(第2位置)としたが、図10Cに示すようにテーブルを省略して、第1位置と第2位置とを異ならせてもよい。
上記実施形態では、自動運転レベルがレベル4未満であるとき、アームレスト(例えばシートアームレスト10)を第1形態(前進位置P3)に変更し、レベル4以上であるとき、第2形態(水平位置P6)に変更するようにしたが、運転レベル以外の態様に基づいてアームレストを第1形態と第2形態とに変更するようにしてもよい。上記実施形態では、シートアームレスト10の移動に関し、支持機構14、スライド機構15、回動機構17によりシートアームレスト10を第1位置または第2位置に移動可能に支持するようにしたが、支持部の構成はこれに限らない。例えばドアアームレスト20の移動に関し、ドア110の内壁111に前後方向にレールを延設し、ドアアームレスト20をレールに沿って前後方向に移動するようにしてもよい。前進位置P3において、アームレスト10,20が前方かつ車両内側のみに変位し、上方へ変位しないように支持部を構成してもよい。上記実施形態では、平行四辺形リンクを用いてアームレストを変位させるようにしたが、他のリンク機構や規制部材を用いて、アームレストの上面が水平となるように変位を規制してもよい。
上記実施形態では、上下一対の板部材によりアームレスト10,20を構成したが、アームレストの構成はこれに限らない。上記実施形態では、下板12,22に対し上板11,21を前方にスライドさせることにより、アームレスト10,20を伸長可能に設けたが、アームレストの長さを変えずに、アームレスト全体を変位させるようにしてもよい。腕部を搭載する部分が上板11,21のみである場合、上板11,21のみをアームレストとして扱ってもよい。上記実施形態では、アームレスト10,20を動作させるために電動モータなどのアクチュエータAC1~AC3を用いたが、アクチュエータの構成は上述したものに限らない。アクチュエータを用いずに、手動でアームレストを動作させるようにしてもよい。この場合、アームレストの支持部にロック機構を設けるとともに、運転レベル等に応じてロック機構を作動させ、アームレストの初期位置から第1形態への変更および第1形態から第2形態への変更を許可または禁止するようにしてもよい。
上記実施形態では、左右のアームレスト10,20をそれぞれ初期位置から移動可能に設けたが、左右いずれか一方のアームレストのみを移動可能としてもよい。例えばドアアームレスト20のみを第1位置および第2位置に移動可能に設けるとともに、シートアームレスト10をシートバックの側面2aに左右方向の回転軸を支点に回動可能に設けるようにしてもよい。上記実施形態では、テーブル16を介して左右のアームレスト10,20を連結するようにしたが、テーブルを介さずに左右のアームレストを連結するようにしてもよい。上記実施形態では、動作選択スイッチ54の操作に応じて、アームレスト10の形態が第2形態へ変更することを許可または禁止するようにしたが、移動指令部の構成はこれに限らない。移動指令部の操作に応じて第1形態への変更を許可または禁止するようにしてもよい。
上記実施形態では、シート100の左側面2aにシートアームレスト10を設けたが、右側面(ドア側)に、鉛直姿勢である格納位置と水平姿勢である使用位置との間を回動可能なシートアームレストを設けるようにしてもよい。この場合、レベル4以上の自動運転モードが設定され、乗員によりシート100を後方にリクライニングする操作がなされたときに、ドア側のシートアームレストを格納位置から使用位置に回動する電動モータを設けてもよい。乗員の腕部が載置可能な部分の面積が拡張するように、アームレスト10,20内にサブアームレストを前方にスライド移動させるように設けてもよい。
所定の自動運転モードが設定された場合に、シート100に着座する乗員の上腕(肩の関節と肘ひじの関節との間の部分)を下方から支持する補助アームレストを、シート100に設けるようにしてもよい。補助アームレストとしては、例えば、シート100の土手部(乗員をホールドするようにシート100の左右両端部から前方に突出した部分)に回動自在に設けられる回動式補助アームレストを採用することができる。回動式補助アームレストは、手動運転モードが設定されている場合、ドライバに触れない位置に格納される。車両の運転モードが手動運転モードから所定レベルの自動運転モードに切り替えられると、回動式補助アームレストは、回動して乗員の上腕を下方から支持する支持位置に配置される。この構成によれば、所定レベル(例えばレベル3)の自動運転モードにおいて、補助アームレストによって上腕を支持することができるため、ドライバの疲労を軽減することができる。また、ドライバは、スマートフォン等の情報端末の操作を容易に行うことも可能であり、快適性を向上することができる。
補助アームレストの構成は、上記回動式補助アームレストに限定されない。例えば、シートバック2の左右両端部に前方に突設される土手部の一部に膨張可能な膨張部を設け、この膨張部を補助アームレストとして用いてもよい。車両の運転モードが手動運転モードに設定されている場合、膨張部は収縮状態であり、所定レベルの自動運転モードに切り替えられると、膨張式補助アームレストが膨張し、膨張部によりドライバの上腕を下方から支持する。この場合も、ドライバの疲労を軽減することができる。
アームレスト(例えばシートアームレスト10)を電動モータ等により左右方向の回転軸を支点に回動可能に構成するとともに、アームレストの先端部に電動モータ等により回動可能に取り付けられる補助アームレストを設けてもよい。この補助アームレストは、車両の運転モードが手動運転モードに設定されている場合、アームレストの先端部から前方に延在するように配置される。車両の運転モードが例えばレベル3の自動運転モードに設定されると、電動モータ等によりアームレストが格納状態まで移動し、さらに、補助アームレストが電動モータ等により90度回転し、ドライバの上腕を下方から支持する。この場合も、ドライバの疲労を軽減することができる。
自動運転モードが設定された場合に操作可能となる入出力装置をアームレスト10,20に設けてもよい。入出力装置は、例えば、方向指示灯、前照灯、ワイパー等を操作するためのスイッチ、自動運転に関する切替操作部、各種情報を表示するとともに乗員の手指等の接触を検知するタッチセンサを有する操作パネル、その他、各種操作入力を行うための操作部等を含む。入出力装置は、例えば、アームレストの先端部における上面または側面に設けられるトラックボール、タッチパネル等により構成することができる。入出力装置は、乗員を撮影するカメラによる撮像データを用いたジェスチャーコントロール機能を備えた装置を用いてもよく、乗員の音声を認識する音声認識機能を備えてもよい。
アームレスト10,20に照明部を設けてもよい。照明部は、アームレストの動作、車両の運転モードに応じて点灯、消灯が制御される。例えば、照明部は、自動運転モードから手動運転モードに切り替えられるときに、点滅するように制御され、手動運転モードに切り替えられることをドライバに報知する。また、照明部は、アームレストが移動する際、移動中であることを認識させるために点滅したり、移動方向を認識させるように点灯部が移動したりするように構成してもよい。また、照明部は、例えばレベル3やレベル4以上の自動運転モードが設定されている場合に、乗員の手元にある対象物を照らすように制御される。さらに、照明部は、例えば乗員が車両を乗り降りする際に点灯するように制御される。なお、照明部は、任意の場所を照らすことができるように、移動可能に設けられることが好ましい。
アームレスト10,20は、自動運転時の運転レベルに応じて、乗員の腕部が載置される部位の幅を変更可能に構成することもできる。例えば、シートアームレストの使用状態において、所定レベル(例えばレベル4以上)の自動運転モードが設定され、乗員によりシート100をリクライニングさせる操作が行われると、アームレストの長手方向に沿って延びる軸を中心に90度程度アームレストを回動させる。これにより、所定レベル未満の自動運転モードであるときに側面であった部位が、上面に位置し、乗員の腕部を載せることが可能になる。つまり、所定レベル未満のときにおけるアームレストの側面の幅が、上面の幅よりも大きくなるように、アームレストを縦長の矩形断面形状に形成しておくことで、所定レベル以上の自動運転モードが設定されたときに、乗員の腕部を支持する部位の幅を拡張することができる。このように、自動運転レベル、および/またはリクライニングの操作に応じて、アームレストにおける乗員の腕部が載置される部位の幅を可変可能に構成することにより、車両内での快適性を向上することができる。自動運転モードから手動運転モードへの切換時に、アームレストを可動してステアリングホイールにドライバの腕部を誘導させるようにしてもよい。
アームレスト10,20に液晶パネル等の表示装置を設けてもよい。さらに、シート100のリクライニングの角度に応じて、表示装置の表示画面の角度を変更するようにしてもよい。表示装置には、例えばアームレスト内に配策されるハーネスを介して車両後方を撮影する車載カメラからの情報が入力され、表示装置には、例えば車両の後方の映像を表示することができる。これにより、自動運転状態のときに、乗員はアームレストの表示装置の表示画面によって、車両の後方の様子を確認することができる。
アームレスト10,20に車内カメラを取り付けるようにしてもよい。この場合、例えばアームレストに設けられた車内カメラにより撮影されたドライバの画像情報が車内状況監視用のECUに出力され、ドライバがモニタリングされる。アームレストにスマートフォン等の情報端末を保持するホルダや情報端末の充電が可能な充電器を設けてもよい。
手動運転モードが設定されている場合のアームレスト10,20の可動範囲に比べて、自動運転モードが設定されている場合のアームレストの可動範囲が大きくなるように、可動範囲を調整可能な装置を設けてもよい。あるいは、自動運転モードにおける運転レベルが所定レベル未満の場合のアームレストの可動範囲に比べて、所定レベル以上の場合のアームレストの可動範囲が大きくなるように、可動範囲を調整可能な装置を設けてもよい。これにより、例えば手動運転状態のときに、アームレストが意図せずに動くなどして、運転の妨げになるようなことが防止され、自動運転状態のときに、アームレストを任意の位置に移動させ、快適性を向上することができる。
上記実施形態のように、シート100の左右にシートアームレストが設けられる形態では、ドア110側のシートアームレストが乗員の乗り降りの際に妨げとなる場合がある。このため、ドア110の開閉スイッチの操作に連動して、ドア側のシートアームレスト10の先端部が車外に位置するようにシートアームレストを回動させ、乗員の乗り降りの経路を確保するようにしてもよい。この場合、シートアームレストの先端部に設けられた照明部を点滅、あるいは点灯させ、後方の他車両のドライバに対し、ドア110が開閉され、シートアームレストが車外に突出している状態であることを報知することが好ましい。シートアームレストが車内から車外に向かって側方に延在して配置されるので、乗員が乗り降りする際につかまることができる。つまり、乗員が乗り降りする際のサポート部材として、シートアームレストを用いることができる。
上記実施形態では、自動運転機能を有する自動運転車両に、アームレスト装置を適用したが、本発明のアームレスト装置は、自動運転機能を有しない車両にも適用することができる。上記実施形態では、車両用シートを乗物用シートの一例として説明したが、本発明は、種々の乗物における乗物用シートに適用可能である。
以上の説明はあくまで一例であり、本発明の特徴を損なわない限り、上述した実施形態および変形例により本発明が限定されるものではない。上記実施形態と変形例の1つまたは複数を任意に組み合わせることも可能であり、変形例同士を組み合わせることも可能である。