JP7242515B2 - 容器入り飲料の微生物検査方法 - Google Patents
容器入り飲料の微生物検査方法 Download PDFInfo
- Publication number
- JP7242515B2 JP7242515B2 JP2019223730A JP2019223730A JP7242515B2 JP 7242515 B2 JP7242515 B2 JP 7242515B2 JP 2019223730 A JP2019223730 A JP 2019223730A JP 2019223730 A JP2019223730 A JP 2019223730A JP 7242515 B2 JP7242515 B2 JP 7242515B2
- Authority
- JP
- Japan
- Prior art keywords
- container
- forming tool
- spout forming
- spout
- beverage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Landscapes
- Measuring Or Testing Involving Enzymes Or Micro-Organisms (AREA)
Description
また、微生物検査方法では、容器が瓶や缶等の樹脂製容器でない場合には、容器から飲料を採取し難いという問題があった。
また、容器内の飲料を採取する際には、注ぎ口形成具により容器を穿孔することで、注ぎ口を形成して容易に飲料の採取ができる。
使用した注ぎ口形成具は、殺菌することで再使用できる。
缶の底に注ぎ口を形成しているので、プルトップ式の缶でもプルタブが邪魔にならないから、注ぎ口を形成しやすい。
第1実施の形態にかかる容器入り飲料の微生物検査方法は、メンブレンフィルター(MF)法による検査方法である。
図2に示すように、微生物検査施設1は、容器殺菌ブース3と、クリーンルーム(検査ブース)5と前室7とに分離してあり、容器殺菌ブース3、クリーンルーム5及び前室7で処理したのち、シャーレ取出工程S7-3及び培養工程S8で、容器内の飲料をシャーレに入れた培地で培養した後、コロニーの有無を検査する。本実施の形態では、一般細菌(水生菌を含む)、真菌(カビ、酵母)を検査する。
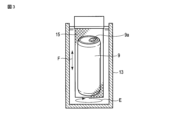
図3に示すように、検査対象となる容器入り飲料は缶入り飲料であり、容器9は天面にプルタブ9aを有するプルトップ式の缶である。また、検査対象となる容器入り飲料は製造ラインからサンプリングした製造後の缶入り飲料であり、飲料の種類は特に限定されないが、例えば、コーヒー系飲料や果樹系飲料である。
図2に示すように、この微生物検査施設1には、ロボットアーム11が設けられており、所定の工程をこのロボットアームで実施している。
ロボットアーム11の姿勢、動き、把持部12や係止具35等の駆動や制御は、予めプログラムしたマイクロコンピュータにより制御されている。
図2に示すように、準備段階では、前室7で培地6を含むシャーレ8(図9参照)を準備しT1、無菌水準備T2、メンブレン準備T3、ファンネル(ろ過器)準備T4をしておく。これらの準備T1~T4は人手で行う。
容器殺菌工程S1では、容器入り飲料の容器9の外面を薬液で殺菌する。検査対象となる容器9は工場で製造後のものをサンプリングして予め並べて配置してあり、ロボットアーム11(図10参照)が所定の容器9を把持して容器9を移動して、籠15(図3参照)に立設した状態で入れ、籠15を図3に示すように、容器用薬液水槽13に浸漬する。容器用薬液水槽13は、殺菌薬液を満たした水槽である。薬液水槽内13では、容器9は全体を殺菌水槽13内に水没している。薬液の薬剤は、過酸化水素や次亜塩素酸等である。
薬液水槽13では、水槽13内を撹拌し又は水流により、矢印Eで示すように薬液を流動させている。更に、籠15は、矢印Fで示すように、薬液水槽13内で上下に間欠動作させている。籠15の上下動作は、ロボットアーム11が籠15を把持して行う。
容器殺菌工程S1の薬液殺菌後に、ロボットアーム11は籠15を薬液水槽13から引き上げた後、籠15内の容器9をつかみ、容器9を熱風吹き付け工程S2のテーブルに立設する。
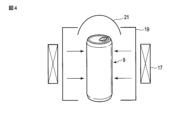
図4に示すように、熱風吹き付け工程S2では、テーブルに立設した容器9の側面からヒータ17で加熱した無菌風を送風機19から吹き付ける。熱風の温度は50℃~70℃であり、好ましくは65℃~70℃である。65℃~70℃であれば、効率よく滅菌や水滴除去ができる。また、容器9にはフード21を被せて、吹き付けた熱風が容器9の全体にあたって滞留し易くしている。
注ぎ口形成工程では、容器9内の飲料を注ぎ出す為の孔を容器9にあける。
本実施の形態では、図5に示すように、熱風吹き付け後のテーブルに載置した容器9を逆さに反転し、容器9の底面9bを上にして底面9bの上から加熱した熱材(注ぎ口形成具)23を差し仕込んで穿孔する。容器9の反転は、ロボットアーム11が容器9を把持して行う。熱材23は本実施の形態では棒材である。熱材23は常設の穿孔装置41で行う。穿孔装置41はシリンダー及びピストンの駆動機構で熱材23を上下動し、例えば熱材23は内蔵された電熱線で加熱している。
容器9の底面9bは熱材23により溶融して穿孔される。尚、容器9の底面9bを穿孔するときには、ロボットアーム11で容器9を保持している。一般に、缶飲料は空寸が小さい為、穿孔の際に熱材23に容器9内の飲料が接触して、飲料がこげて付着することがある。したがって、穿孔後の熱材23は洗浄及び殺菌する必要があるので、熱材23の洗浄及び殺菌(注ぎ口形成具殺菌工程S3-1及び乾燥・滅菌工程S3-2)については、後述する。
一方、図2に示すように、ロボットアーム11は、マニホールド25(図7参照)へファンネル27(図7参照)設置S4-1をした後、準備したメンブレン29(図8参照)を取り出しS4-2、ファンネル27にメンブレン29(図7参照)を設置するS4-3。設置したメンブレン29には、チューブ(図示せず)から無菌水を注入する(S4-4)。
図7に示すように、ロボットアーム11は、容器9を把持して注ぎ口9c(図5参照)を形成した底面9bが下に向くように傾斜させてファンネル27に容器9内の飲料を注ぎ、ろ過する。
図8に示すように、ろ過後、ロボットアーム11により、ファンネル27の周壁27aを基台27bから外し、ロボットアーム11が保持する切断刃31でメンブレン29を2枚の半月状のメンブレン片29a、29bに切断する。
ファンネル27の基台27bには、その縁部27cに切断刃31の挿入溝33が形成されている。本実施の形態では、挿入溝33は縁部27cの対向する位置に2箇所形成されている。挿入溝33により、切断刃31でメンブレン29を引き切るときに切断刃31が縁部27cと干渉することなく、縁部27cを越えて引き操作できる。
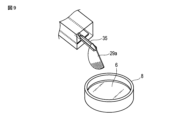
図9に示すように、ロボットアーム11は、ファンネル27の基台27bに載置されている一方のメンブレン片29aを係止具35で把持してメンブレン片29aを採取し(図2のS6-2)、シャーレ8の培地6に貼付する。係止具35は、例えばピンセットである。尚、メンブレン片29aをシャーレ8の培地6に添付する前に、シャーレ8の蓋を開けておく(図2のS7-1)。
その後、シャーレ8に蓋を被せる(図2のS7-2)。シャーレ8の蓋の開閉は、テーブル上に設けた自動機構により蓋を開閉するが、ロボットアーム11が行っても良い。
同様に、他方のメンブレン片29bも係止具35で把持し、他の種類の培地を入れたシャーレ8に貼付し、その後シャーレ8に蓋を被せる(図2のS7-2)。
蓋を被せた各シャーレ8は、そのまま取り出してS7-3培養器で培養する。培養後、コロニーの有無を観察する。
一方、注ぎ口形成工程S3で使用した熱材(注ぎ口形成具)23は、注ぎ口形成具殺菌工程で殺菌し、次に乾燥・滅菌工程S3-2で乾燥滅菌する。
図6(a)に示すように、注ぎ口形成具殺菌工程S3-1では、注ぎ口形成工程S3において、熱材23で容器9に注ぎ口を形成後、ロボットアーム11が熱材23を保持して、注ぎ口形成具用薬液水槽26に移動し、熱材23を浸漬して、殺菌及び洗浄し、次に乾燥・滅菌工程S3-2でロボットアーム11が熱材23を保持したまま、乾燥及び滅菌する。乾燥・滅菌は、図6(b)に示すように、電気滅菌器43で加熱して乾燥・滅菌する。電気滅菌器43としては、例えば、ループシネレータ(ヤマト科学株式会社製)を用いる。尚、熱材23を保持するロボットアーム11に代えて、上述の注ぎ口形成工程S3で用いた穿孔装置41が熱材23を保持して移動し、注ぎ口形成具殺菌工程S3-1及び乾燥・滅菌工程S3-2を実施しても良い。
本実施の形態によれば、容器殺菌工程S1で容器9の外面を薬液で殺菌すると共に熱風吹き付け工程S2で無菌処理された熱風で外面を乾燥及び殺菌し、注ぎ口形成工程S3で穿孔した孔から容器内の飲料を採取し、メンブレン29でろ過するので、メンブレンフィルターろ過法(MF法)による微生物検査方法において、容器外面に付着した菌の混入を防止できる。
また、ロボットアーム11により、容器9の移送及び容器9に対する各作業S1~S7ができるので、密閉されたクリーンルーム内で自動化ができる。
容器用薬液水槽13内では、薬液を流動させているので、容器外面に衝突させ薬液を乱流にでき、更に、容器9として缶において、プルタブ9aや缶の巻締部等の凹凸があっても外面全体に殺菌液の浸透性を高めることができる。
また、注ぎ口形成具として熱材23を容器の底面9bに差し込むだけで容易に穿孔して注ぎ口9cを形成でき且つ注ぎ口9cの殺菌を図ることができる。
メンブレン29の切断を、ファンネル27上で且つ切断刃(メス)31で直接行うことにより、ハサミ等の裁断機でファン熱29を切断する場合に比較して、機器がメンブレン29に接触する部分を最小にでき、菌の残存を抑えると共に無菌状態の維持が可能になる。また、切断刃31としてメスを使用することで、サイズが小さく使い捨ても可能であるから使い勝手が良い。
切断刃31は、一回切断作業をする毎に熱滅菌をすることが好ましい。この場合、切断刃31の熱滅菌はロボットアーム11に内蔵した熱滅菌装置で行っても良いし、別に設けた熱滅菌装置で行っても良い。また、切断刃31は、注ぎ口形成具用薬液水槽26に浸漬して殺菌しても良い。
図11を参照して本発明の第2実施の形態を説明する。
この第2実施の形態では、検査対象としての容器入り飲料の容器9が缶であり且つ容器9を缶切り(注ぎ口形成具)45で注ぎ口形成を行う場合と、検査対象としての容器入り飲料の容器9が瓶であり且つ容器9を栓抜き(注ぎ口形成具)47で王冠9dを外して注ぎ口形成を行う場合を示している。
図11の(a)に示すように、缶切り45と栓抜き47は、前の微生物検査の注ぎ口形成工程S3で使用したものであり、注ぎ口形成具殺菌工程S3-1及び乾燥・滅菌工程S3-2後のものであり、電気滅菌器43に収納されている。
(b)に示すように、電気滅菌器43に収納されている缶切り45((a)参照)をロボットアーム11が取り出し、(b)及び(c)に示すように、注ぎ口形成工程S3(図1参照)において、缶切り45で容器9に注ぎ口9cを形成する。この第2実施の形態では、容器9は、ロボットアーム11とは別に設けた挟持装置のアーム49で反転した後、挟持しているが、他のロボットアーム11で保持しても良い。
一方、缶切り45は、ロボットアーム11で保持し、缶切り45を容器9の底面に押し当てて揺動することで注ぎ口9cを形成する。
図11(c)で拡大して示しているのは、缶切り45に飲料液nが付着して汚れた様子を示している。
(f)で保持している栓抜き47は、上述した缶切り45と同様に、電気滅菌器43に収納されてあった栓抜きである((a)参照)。この注ぎ口形成工程S3で栓抜き47を使用する場合にも、容器9の揺れ等により、栓抜き47に飲料液n((c)参照)が付着する場合がある。
注ぎ口形成具殺菌工程S3-1の後、乾燥・滅菌工程S3-2で熱風による滅菌を行う。(e)では、注ぎ口形成具殺菌工程S3-1の後の缶切り45及び栓抜き4はロボットアーム11が、搬送コンベア51に装着する。搬送コンベア51は、装着された缶切り45及び栓抜き4を、ヒータ17を備える送風機19へ移動する。
そして、乾燥・滅菌工程S3-2終了後の缶切り45及び栓抜き4は、ロボットアーム11により、(a)に示すように、電気滅菌器43に収納され、次の使用に供される。
尚、容器用薬液水槽13には、容器(缶、瓶)9毎に対応する籠15に入れて浸漬している。
この第2実施の形態によれば、上述した第1実施の形態と同様の作用効果を奏することができると共に、容器9が缶及び瓶というように、容器9の種類が異なる場合でも、ロボットアーム11による自動化した微生物検査ができる。
また、注ぎ口形成具用薬液水槽26の薬液を容器用薬液水槽13に流して使用しているので、薬液の効率的使用ができ、薬液の無駄を防止できる。
その後、(b)で示すように、他方のロボットアーム53は栓抜き47を吊り下げた状態で移動し、(c)に示すように、搬送コンベア57に挟持部12を係止した後、挟持部12を他方のロボットアーム53から取り外して、搬送コンベア57に引き渡す。搬送コンベア57では、挟持部12を取り付けたまま下方に駆動して、注ぎ口形成具用薬液水槽26に栓抜き47を浸漬した後、上方に駆動した後、矢印Rに示すように180度回転して向きを変え、栓抜き47を水平状態に保持する。その状態で送風機19の熱風に当てる。
尚、挟持部12では栓抜き47を固定している向きを回動可能で、且つ所定の向きで固定できるように構成してある。
図14及び図15に示すように、第1実施の形態のメンブレン設置S4(図1及び図2参照)、メンブレンろ過工程S5(図1及び図2参照)、メンブレン切断工程S6(図1及び図2参照)、培地に貼付工程S7(図1及び図2参照)に代えて、注ぎ口形成工程S3の後、容器9から飲料をシャーレに採取する工程S5、そのシャーレに液体培地を注入する工程S6-1、シャーレに蓋をする工程S7-2を有する。
この第3実施の形態では、混釈法による微生物検査においても、第1実施の形態と同様の作用効果を奏することができる。
例えば、容器殺菌工程S1は、ロボットアーム11が籠15を上下動させることに限らず、籠15を上下動させる機構はロボットアーム11とは別に設けても良い。
容器9は、容器9が缶である場合には、プルタブ9aがない缶であっても良い。この場合には、注ぎ口9cは、缶の上面に形成しても良い。また、プルタブ9aがある場合には、プルタブ9aを避けた位置に注ぎ口9cを形成しても良い。
また、容器9がキャップを有するボトルタイプの缶である場合に、缶はキャップを回転して外してもよい。この場合には、ロボットアーム11でキャップを回転させてキャプを外し、注ぎ口を形成し、メンブレンろ過工程S5では、容器9の口部から容器9内の飲料をファンネル27に注いでろ過する。尚、容器9がボトルタイプの缶の場合、第1実施形態と同様にキャップを装着したままキャップに熱材23を押し当てて、穿孔して注ぎ口を形成しても良い。
容器殺菌工程S1では、薬液に限らず、紫外線(UV)照射により容器9の外面を殺菌しても良い。
9a プルタブ
9b 底面
9c 注ぎ口
11 ロボットアーム
13 容器用薬液水槽
23 熱材(注ぎ口形成具)
26 注ぎ口形成具用薬液水槽
45 缶切り(注ぎ口形成具)
47 栓抜き(注ぎ口形成具)
51 搬送コンベア
Claims (6)
- 容器入り飲料の容器の外面を薬液で殺菌する容器殺菌工程と、
前記容器入り飲料の前記容器の外面に無菌処理された熱風を吹き付ける熱風吹き付け工程と、
前記容器に注ぎ口を形成する注ぎ口形成工程と、
前記容器に形成した注ぎ口から飲料を採取する飲料採取工程と、
前記採取した飲料から微生物を培養する培養工程と、を備える容器入り飲料の微生物検査方法において、
前記容器は缶であり、
前記注ぎ口形成工程は、缶の底を上に向けて缶の底に注ぎ口形成具で注ぎ口を形成しており、
前記注ぎ口形成具は缶切り又は加熱した熱材であり、缶の底に上から缶切り又は熱材を差し入れて穿孔しており、
前記注ぎ口形成工程で使用した前記注ぎ口形成具を殺菌する注ぎ口形成具殺菌工程を、更に備えることを特徴とする容器入り飲料の微生物検査方法。 - 前記注ぎ口形成具殺菌工程は、注ぎ口形成具を注ぎ口形成具用薬液水槽に浸漬して殺菌し、次に前記注ぎ口形成具用薬液水槽から取り出して乾燥した後に、他の容器の前記注ぎ口形成工程で使用することを特徴とする請求項1に記載の容器入り飲料の微生物検査方法。
- 前記容器殺菌工程は容器用薬液水槽に容器を浸漬して殺菌しており、前記注ぎ口形成具用薬液水槽内の薬液を前記容器用薬液水槽に流入していることを特徴とする請求項2に記載の容器入り飲料の微生物検査方法。
- 少なくとも前記注ぎ口形成工程及び前記飲料採取工程は、ロボットアームを備えるクリーンルーム内で実行しており、
前記ロボットアームが、前記容器又は前記注ぎ口形成具を把持して、前記容器を穿孔することを特徴とする請求項1~3のいずれか一項に記載の容器入り飲料の微生物検査方法。 - 前記注ぎ口形成具殺菌工程は、前記クリーンルーム内で実行しており、前記ロボットアームが前記注ぎ口形成具を搬送コンベアに取り付けた後、搬送コンベアにより注ぎ口形成具用薬液水槽に浸漬し及び浸漬後取り出すことを特徴とする請求項4に記載の容器入り飲料の微生物検査方法。
- 前記注ぎ口形成具殺菌工程は、前記注ぎ口形成具を前記注ぎ口形成具用薬液水槽に浸漬して取り出した後に、熱風を吹き付けて乾燥・滅菌することを特徴とする請求項5に記載の容器入り飲料の微生物検査方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019223730A JP7242515B2 (ja) | 2019-12-11 | 2019-12-11 | 容器入り飲料の微生物検査方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019223730A JP7242515B2 (ja) | 2019-12-11 | 2019-12-11 | 容器入り飲料の微生物検査方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021090391A JP2021090391A (ja) | 2021-06-17 |
| JP7242515B2 true JP7242515B2 (ja) | 2023-03-20 |
Family
ID=76310786
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019223730A Active JP7242515B2 (ja) | 2019-12-11 | 2019-12-11 | 容器入り飲料の微生物検査方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7242515B2 (ja) |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001228064A (ja) | 2000-02-18 | 2001-08-24 | Daiwa Can Co Ltd | 無菌状態監視用サンプリング装置 |
| JP2008220307A (ja) | 2007-03-14 | 2008-09-25 | Daiwa Can Co Ltd | 容器詰め製品の内容物検査方法 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06174732A (ja) * | 1992-12-10 | 1994-06-24 | Nittetsu Mining Co Ltd | 自動サンプリング・培地分注方法及び装置 |
-
2019
- 2019-12-11 JP JP2019223730A patent/JP7242515B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001228064A (ja) | 2000-02-18 | 2001-08-24 | Daiwa Can Co Ltd | 無菌状態監視用サンプリング装置 |
| JP2008220307A (ja) | 2007-03-14 | 2008-09-25 | Daiwa Can Co Ltd | 容器詰め製品の内容物検査方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021090391A (ja) | 2021-06-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1460126B1 (en) | Microorganisms sampling method and microorganism sampling device | |
| US9085792B2 (en) | Methods for inoculating culture media on Petri dishes by means of vibration frequencies | |
| JP7106422B2 (ja) | ボトル入り飲料の微生物検査方法 | |
| US10918033B2 (en) | Device and method for propagating plants | |
| JP2009189362A (ja) | 細胞培養装置 | |
| CN109640764A (zh) | 用于获取蛋液的装置 | |
| JP7242515B2 (ja) | 容器入り飲料の微生物検査方法 | |
| CN109731860B (zh) | 软式内镜消毒灭菌装置 | |
| JP2015510398A (ja) | 植物インフィルトレーション装置 | |
| JPH05338629A (ja) | ミネラルウォーターの無菌充填方法および無菌充填装置 | |
| CN215374640U (zh) | 植物检疫用样本提取设备 | |
| CN112300908A (zh) | 一种微生物样本前处理接种及培养模块 | |
| JP2005278566A (ja) | 無菌培養方法及びその装置 | |
| JP2020065468A (ja) | ろ過装置及び微生物検査方法 | |
| TWI616525B (zh) | 初代細胞萃取設備及其使用方法 | |
| JP2005218376A (ja) | 生体組織片からの細胞単離装置 | |
| JP2020178572A (ja) | 容器入り飲料の微生物検査方法及び飲料製造装置 | |
| JP2004286568A (ja) | 微生物採取方法及び微生物採取装置 | |
| CN111071580A (zh) | 一种培养平板灌装系统及其灌装方法 | |
| TW201815511A (zh) | 細胞層片之切斷方法 | |
| JP2515317B2 (ja) | バイアルの自動無菌試験装置 | |
| CN209361392U (zh) | 一种取样管杀菌消毒箱 | |
| EP0611820B1 (en) | Method of inoculating a liquid and inoculation vessel and device for the application of the method | |
| CN217566561U (zh) | 一种配置消毒棉球的简易装置 | |
| JPH03240482A (ja) | 液体培地へのコロニーの移植方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211202 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221025 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20221026 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221201 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230207 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230308 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7242515 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |