前記課題を解決するためになされた第1の発明は、車椅子利用者を含む歩行者が所持する歩行者装置であって、車載装置およびサーバ装置との間で情報を送受信する通信部と、前記車載装置との間で送受信した情報に基づいて衝突の危険性を判定して、歩行者に対する注意喚起を制御する制御部と、を備え、前記制御部は、自歩行者が支援対象者である場合に、自歩行者の現在の移動状態情報に基づいて、自歩行者が通行遅滞状態であるか否かを判定し、自歩行者が通行遅滞状態である場合には、自歩行者に関する歩行者情報を前記サーバ装置に送信する構成とする。
これによると、サーバ装置において、支援対象者の通行を支援するために必要な情報として、支援対象者が通行に手間取る場所の情報を効率よく収集することができる。
また、第2の発明は、前記通信部は、歩車間通信により前記車載装置と通信を行い、前記制御部は、前記歩行者情報を含むメッセージを前記通信部から前記車載装置に送信する構成とする。
これによると、歩行者情報を、車載装置を介してサーバ装置に送信することができる。
また、第3の発明は、前記通信部は、路歩間通信により路側装置と通信を行い、前記制御部は、前記歩行者情報を含むメッセージを前記通信部から前記路側装置に送信する構成とする。
これによると、歩行者情報を、路側装置を介してサーバ装置に送信することができる。
また、第4の発明は、前記制御部は、自歩行者が危険行動をとったか否かを判定し、自歩行者が危険行動をとった旨の通知と、自歩行者が通行遅滞状態である旨の通知とを識別する通知識別情報を含むメッセージを、前記通信部から送信する構成とする。
これによると、歩者間通信(路歩間通信)のメッセージを送信する際に、通行遅滞通知のメッセージと危険行動通知のメッセージとが混同されることを避けることができる。
また、第5の発明は、前記制御部は、自歩行者が長時間滞留状態であるか否かを判定し、自歩行者が長時間滞留状態である場合には、長時間滞留状態である旨の情報を前記歩行者情報に付加して前記サーバ装置に送信する構成とする。
これによると、長時間滞留状態である場合には、歩行者が体調不良で動けない状態でいる可能性が高いため、高齢者などの支援対象者の見守りに活用することができる。
また、第6の発明は、前記制御部は、自歩行者が外国人であるか否かに関する情報を前記歩行者情報に付加して送信する構成とする。
これによると、外国人である歩行者の情報を収集することができる。これにより、分析結果を、外国人を対象にした案内に活用することができる。
また、第7の発明は、前記制御部は、自歩行者が通行遅滞状態である場合でも、現在位置が所定の通知除外地点である場合には、前記歩行者情報を前記サーバ装置に送信しない構成とする。
これによると、自歩行者が所定の場所(例えばバス停)で待ち状態である場合には、歩行者情報をサーバ装置に送信しないため、通行の困難性に関係ない事情で通行遅滞状態となった場合を分析対象から除外して、分析精度を高めることができる。
また、第8の発明は、前記制御部は、自歩行者が通行遅滞状態である場合でも、自歩行者の近傍に登録者がいる場合には、前記歩行者情報を前記サーバ装置に送信しない構成とする。
これによると、自歩行者の近傍に知人がいて、その知人と会話しながらゆっくりと歩行していると想定される場合には、歩行者情報をサーバ装置に送信しないため、通行の困難性に関係ない事情で通行遅滞状態となった場合を分析対象から除外して、分析精度を高めることができる。
また、第9の発明は、前記制御部は、自歩行者が支援対象者であり、かつ、通行遅滞状態でない場合に、自歩行者の現在位置が、過去に支援対象者が通行遅滞状態となった地点に一致する場合には、自歩行者を比較対象者として、自歩行者の属性情報を含む前記歩行者情報を前記サーバ装置に送信する構成とする。
これによると、サーバ装置において、支援対象者に該当する歩行者の中で、通行遅滞状態となった歩行者の情報と、通行遅滞状態とならなかった歩行者(比較対象者)の情報とを収集することができるため、通行遅滞状態が発生する原因を歩行者の属性に応じて分析することができる。
また、第10の発明は、前記制御部は、自歩行者が通行遅滞状態でない場合に、自歩行者の現在位置が、過去に支援対象者が通行遅滞状態となった地点に一致する場合には、自歩行者を比較対象者として、前記歩行者情報を前記サーバ装置に送信する構成とする。
これによると、サーバ装置において、支援対象者で通行遅滞状態となった歩行者の情報と、支援対象者以外の一般の歩行者の情報とを収集することができるため、通行遅滞状態の判定基準の妥当性を評価して、通行遅滞状態の判定精度を高めることができる。
また、第11の発明は、前記制御部は、前記移動状態情報として、所定時間あたりの移動距離に基づいて、自歩行者が通行遅滞状態であるか否かを判定する構成とする。
これによると、自歩行者の通行遅滞状態を精度よく判定することができる。
また、第12の発明は、さらに、環境センサ、モーションセンサ、および生体センサの少なくともいずれかのセンサを備え、前記制御部は、前記移動状態情報と、前記センサの検出結果とに基づいて、自歩行者が通行遅滞状態であるか否かを判定する構成とする。
これによると、自歩行者の通行遅滞状態を精度よく判定することができる。
また、第13の発明は、車両に搭載される車載装置であって、車椅子利用者を含む歩行者が所持する歩行者装置およびサーバ装置との間で情報を送受信する通信部と、前記歩行者装置との間で送受信した情報に基づいて衝突の危険性を判定して、自車両の運転者に対する注意喚起を制御する制御部と、を備え、前記制御部は、自車両の運転者が支援対象者である場合に、自車両の現在の移動状態情報に基づいて、自車両が運転遅滞状態であるか否かを判定し、自車両が運転遅滞状態である場合には、自車両に関する車両情報を前記サーバ装置に送信する構成とする。
これによると、サーバ装置において、支援対象者の運転を支援するために必要な情報として、支援対象者が運転に手間取る場所の情報を効率よく収集することができる。
また、第14の発明は、道路を通行する車椅子利用者を含む歩行者の通行状況に関する情報を収集する情報収集システムであって、歩行者が所持する歩行者装置と、この歩行者装置から収集した情報を管理するサーバ装置と、を備え、前記歩行者装置は、車載装置および前記サーバ装置との間で情報を送受信する通信部と、前記車載装置との間で送受信した情報に基づいて衝突の危険性を判定して、歩行者に対する注意喚起を制御する制御部と、を備え、前記制御部は、自歩行者が支援対象者である場合に、自歩行者の現在の移動状態情報に基づいて、自歩行者が通行遅滞状態であるか否かを判定し、自歩行者が通行遅滞状態である場合には、自歩行者に関する歩行者情報を前記サーバ装置に送信する構成とする。
これによると、第1の発明と同様に、支援対象者の通行を支援するために必要な情報を効率よく収集することができる。
また、第15の発明は、道路を通行する車椅子利用者を含む歩行者の通行状況に関する情報を収集する情報収集方法であって、歩行者が所持し、車載装置との間で情報を送受信して衝突の危険性を判定して、歩行者に対する注意喚起を行う歩行者装置が、自歩行者が支援対象者である場合に、自歩行者の現在の移動状態情報に基づいて、自歩行者が通行遅滞状態であるか否かを判定し、自歩行者が通行遅滞状態である場合には、自歩行者に関する歩行者情報をサーバ装置に送信する構成とする。
これによると、第1の発明と同様に、支援対象者の通行を支援するために必要な情報を効率よく収集することができる。
以下、本発明の実施の形態を、図面を参照しながら説明する。
(第1実施形態)
図1は、第1実施形態に係る通信システムの全体構成図である。
この通信システムは、歩行者が携帯する歩行者端末1(歩行者装置)および携帯情報端末2と、車両に搭載される車載端末3(車載装置)およびカーナビゲーション4(経路案内装置)と、路側機5(路側装置)と、管理サーバ6(サーバ装置)と、を備えている。
歩行者端末1と車載端末3との間では歩車間通信が行われ、歩行者端末1と路側機5との間では路歩間通信が行われる。また、路側機5と車載端末3との間では路車間通信が行われる。この歩車間通信、路歩間通信および路車間通信は、同様のITS無線通信であり、共通の仕様(データ構成)に基づくメッセージが送受信される。このITS通信は、ITS(Intelligent Transport System:高度道路交通システム)を利用した安全運転支援無線システムで採用されている周波数帯(例えば700MHz帯や5.8GHz帯、5.9GHz帯)を利用した無線通信である。また、メッセージはブロードキャストで送信されるが、メッセージに宛先となる装置の識別情報(端末ID)を付加することで、特定の装置を対象とした情報を送信することができる。
歩行者端末1は、ITS通信(歩車間通信)により車載端末3との間で、位置情報などを含むメッセージを送受信して、自歩行者と車両との衝突の危険性を判定する。また、本実施形態では、歩行者端末1が、歩行者の情報を管理サーバ6に提供するため、歩行者の情報を含むメッセージを車載端末3や路側機5に送信する。
携帯情報端末2は、スマートフォン、携帯電話、タブレット端末、ウェアラブル端末などである。この携帯情報端末2は、歩行者端末1と接続され、歩行者端末1からの指示に応じて、歩行者に対する注意喚起の動作(例えば音声出力や振動出力など)を行う。なお、歩行者端末1と携帯情報端末2とは単一の装置として一体化されたものであってもよい。
車載端末3は、ITS通信(歩車間通信)により歩行者端末1との間で、位置情報などを含むメッセージを送受信して、歩行者と自車両との衝突の危険性を判定する。また、本実施形態では、車載端末3が、セルラー通信の基地局7および広域ネットワークを介して管理サーバ6と接続され、歩行者端末1と管理サーバ6との間での情報のやり取りを中継し、歩行者端末1から受信した歩行者の情報を管理サーバ6に送信する。
カーナビゲーション4は、運転者に対して経路案内を行う。このカーナビゲーション4は、車載端末3と接続され、車載端末3からの指示に応じて、運転者に対する注意喚起の動作(例えば音声出力や画面表示など)を行う。なお、車載端末3とカーナビゲーション4とは単一の装置として一体化されたものであってもよい。
路側機5は、道路に設置され、交通情報などの各種の情報を歩行者端末1や車載端末3に配信する。また、本実施形態では、路側機5が、セルラー通信の基地局7および広域ネットワークを介して管理サーバ6と接続され、歩行者端末1と管理サーバ6との間での情報のやり取りを中継し、歩行者端末1から受信した歩行者の情報を管理サーバ6に送信する。
管理サーバ6は、歩行者端末1から歩行者の情報を収集して管理し、その歩行者の情報に基づいて各種の分析処理を行う。
なお、本実施形態では、歩行者端末1と管理サーバ6との間での情報のやり取りを車載端末3や路側機5で中継するようにしたが、両方で同時に中継する必要はなく、いずれか一方で中継すればよい。例えば、歩行者端末1の周辺に路側機5があれば路側機5を利用し、歩行者端末1の周辺に路側機5がなければ車載端末3を利用すればよい。
また、歩行者端末1と管理サーバ6との間での情報のやり取りを車載端末3や路側機5で中継しない構成も可能である。例えば、歩行者端末1にセルラー通信や無線LANの機能を搭載し、または、携帯情報端末2に搭載されたセルラー通信や無線LANの機能を利用するようにしてもよい。
次に、第1実施形態に係る通信システムにおける情報収集について説明する。図2は、通信システムにおける情報収集の概要を示す説明図である。
道路には、階段や急な坂道や段差などにより、高齢者や車椅子利用者などが通行に非常に手間取る場所がある。本実施形態では、このような通行に手間取る場所(通行遅滞地点)に関する情報を取得するため、歩行者端末1において、自歩行者が通行に手間取っている状態(通行遅滞状態)か否かを判定し、通行遅滞状態であると、自歩行者に関する歩行者情報(位置情報および属性情報など)を管理サーバ6に送信する。
これにより、管理サーバ6では、通行遅滞状態となった歩行者の歩行者情報を収集することができ、この歩行者情報に基づいて、高齢者や車椅子利用者などが通行に手間取る場所(通行遅滞地点)を設定して、各種の分析を行うことにより、その分析結果を、支援対象者の通行を支援するシステムに活用することができる。例えば、通行遅滞地点の情報を支援対象者に提供し、また、通行遅滞地点を除外した経路を支援対象者に案内することで、支援対象者の円滑な通行を確保することができる。
また、支援対象者に対する経路案内以外にも、本発明は活用可能である。例えば、バス停やタクシー乗り場の見直しに活用可能である。バス停やタクシー乗り場への経路に、通行遅滞地点が含まれている場合、経路にできるだけ通行遅滞地点が含まれない場所に、バス停やタクシー乗り場を変更することが可能である。
なお、支援対象者に対する案内は歩行者端末1や携帯情報端末2で行えばよいが、道路に設置されたデジタルサイネージを利用するようにしてもよい。
次に、第1実施形態に係る歩行者端末1の概略構成について説明する。図3は、歩行者端末1の概略構成を示すブロック図である。
歩行者端末1は、測位部11と、ITS通信部12(歩車間通信部、路歩間通信部)と、入出力部13と、記憶部14と、制御部15と、を備えている。
測位部11は、GPS(Global Positioning System)、QZSS(Quasi-Zenith Satellite System)などの衛星測位システムにより自装置の位置を測定して、自装置の位置情報(緯度、経度)を取得する。
ITS通信部12は、車載端末3との間でITS通信(歩車間通信)によりメッセージを送受信する。また、ITS通信部12は、路側機5との間でITS通信(歩路間通信)によりメッセージを送受信する。
入出力部13は、携帯情報端末2との間で情報の入出力を行う。この入出力部13から出力される情報に基づいて、携帯情報端末2において、歩行者に対する注意喚起の動作が行われる。
記憶部14は、地図情報や、制御部15を構成するプロセッサで実行されるプログラムなどを記憶する。また、記憶部14は、自装置の端末IDや、自歩行者の属性に関する情報(歩行者属性情報)を記憶する。なお、歩行者属性情報とは、利用者が高齢者であることや、利用者が杖を利用していることや、車椅子を利用していることを表す情報である。
制御部15は、メッセージ制御部21と、衝突判定部22と、注意喚起制御部23と、危険行動判定部24と、支援対象者判定部25と、通行遅滞状態判定部26と、を備えている。この制御部15は、プロセッサで構成され、制御部15の各部は、記憶部14に記憶されたプログラムをプロセッサで実行することで実現される。
メッセージ制御部21は、車載端末3および路側機5との間でのメッセージの送受信を制御する。本実施形態では、メッセージの内容が適宜に変更され、自歩行者が危険エリアに進入すると、歩者間通信の通常のメッセージを送信し、自歩行者が危険行動をとった場合には、危険行動通知のメッセージを送信し、自歩行者が通行遅滞状態になると、通行遅滞通知のメッセージを送信する。
衝突判定部22は、測位部11で取得した自歩行者の位置情報と、車載端末3から受信したメッセージに含まれる車両の位置情報とに基づいて、自歩行者に車両が衝突する危険性があるか否かを判定する。
注意喚起制御部23は、衝突判定部22の判定結果に応じて、自歩行者に対する注意喚起を実施する。本実施形態では、携帯情報端末2を制御して、歩行者に対する注意喚起の動作(例えば音声出力や振動など)を携帯情報端末2に行わせる。
危険行動判定部24は、測位部11で取得した自歩行者の位置情報、および記憶部14に記憶された地図情報などに基づいて、歩行者が道路上で危険行動をとったか否かを判定する。この危険行動とは、不注意な道路横断、例えば青信号以外で交差点を横断する行動や、無理な道路横断、例えば横断歩道以外で道路を横断する行動などである。
この危険行動判定部24で自歩行者が危険行動をとったものと判定されると、メッセージ制御部21において、危険行動通知のメッセージを生成してITS通信部12から送信する。
支援対象者判定部25は、記憶部14に記憶された歩行者属性情報に基づいて、自歩行者が支援対象者であるか否かを判定する。ここで、支援対象者とは、道路を通行する際に何らかの事情で通行に手間取るために、経路案内などの支援が望まれる歩行者であり、例えば高齢者、身体の不自由な人、車椅子利用者などである。
なお、自歩行者が支援対象者であることを登録する操作を行って、自歩行者が支援対象者であることを表す情報を歩行者属性情報として記憶部14に記憶しておくようにしてもよい。
通行遅滞状態判定部26は、測位部11で取得した自歩行者の位置情報に基づいて、自歩行者の現在の移動状態情報を取得して、その移動状態情報に基づいて、自歩行者が通行に手間取っている状態(通行遅滞状態)であるか否かを判定する。具体的には、まず、直近の所定時間(単位時間)における移動距離(速度情報)を算出する。また、過去の所定期間における移動距離の標準値(例えば平均値)を算出する。そして、移動距離の標準値に所定の係数aを乗算した値(a×標準値)をしきい値として、次式のように、直近の所定時間における移動距離がしきい値より大きいか否かを判定する。
移動距離>a×標準値
ここで、係数aは適宜に設定すればよいが、例えば0.5に設定してもよい。
この通行遅滞状態判定部26で自歩行者が通行遅滞状態であると判定されると、メッセージ制御部21において、通行遅滞通知のメッセージを生成してITS通信部12から送信する。
次に、第1実施形態に係る車載端末3の概略構成について説明する。図4は、車載端末3の概略構成を示すブロック図である。
車載端末3は、測位部31と、ITS通信部32(歩車間通信部)と、セルラー通信部33と、入出力部34と、記憶部35と、制御部36と、を備えている。
測位部31は、GPS、QZSSなどの衛星測位システムにより自装置の位置を測定して、自装置の位置情報を取得する。
ITS通信部32は、歩行者端末1との間でITS通信(歩車間通信)によりメッセージを送受信する。
セルラー通信部33は、基地局7との間でセルラー通信を行う。このセルラー通信部33により、基地局7およびネットワークを介して管理サーバ6と情報をやり取りすることができる。
記憶部35は、地図情報や、制御部36を構成するプロセッサで実行されるプログラムなどを記憶する。
制御部36は、メッセージ制御部41と、衝突判定部42と、注意喚起制御部43と、転送制御部44と、を備えている。この制御部36は、プロセッサで構成され、制御部36の各部は、記憶部35に記憶されたプログラムをプロセッサで実行することで実現される。
メッセージ制御部41は、歩行者端末1との間でのメッセージの送受信を制御する。
衝突判定部42は、測位部31で取得した自車両の位置情報と、歩行者端末1から受信したメッセージに含まれる歩行者の位置情報とに基づいて、歩行者に自車両が衝突する危険性があるか否かを判定する。
注意喚起制御部43は、衝突判定部42の判定結果に応じて、自車両の運転者に対する注意喚起を行う。本実施形態では、カーナビゲーション4を制御して、運転者に対する注意喚起の動作(例えば音声出力や画面表示など)をカーナビゲーション4に行わせる。また、注意喚起制御部43は、歩行者端末1から危険行動通知のメッセージを受信すると、運転者に対する注意喚起の制御を行う。
転送制御部44は、歩行者端末1から送信される通行遅滞通知のメッセージを受信すると、その通行遅滞通知のメッセージに含まれる情報(通行遅滞情報)をセルラー通信部33から管理サーバ6に送信する。
なお、本実施形態では、車載端末3が、セルラー通信を利用して管理サーバ6と情報のやり取りを行うようにしたが、無線LAN通信を利用するようにしてもよい。
次に、第1実施形態に係る路側機5の概略構成について説明する。図5は、路側機5の概略構成を示すブロック図である。
路側機5は、ITS通信部51(歩車間通信部)と、セルラー通信部52と、記憶部53と、制御部54と、を備えている。
ITS通信部51は、歩行者端末1との間でITS通信(路歩間通信)によりメッセージを送受信する。
セルラー通信部52は、基地局7との間でセルラー通信を行う。このセルラー通信部52により、基地局7およびネットワークを介して管理サーバ6と情報をやり取りすることができる。
記憶部35は、制御部36を構成するプロセッサで実行されるプログラムなどを記憶する。
制御部54は、メッセージ制御部61と、転送制御部62と、を備えている。この制御部54は、プロセッサで構成され、制御部54の各部は、記憶部53に記憶されたプログラムをプロセッサで実行することで実現される。
メッセージ制御部61は、歩行者端末1との間でのメッセージの送受信を制御する。
転送制御部62は、歩行者端末1から送信される通行遅滞通知のメッセージを受信すると、その通行遅滞通知のメッセージに含まれる情報(通行遅滞情報)をセルラー通信部52から管理サーバ6に送信する。
なお、本実施形態では、路側機5が、セルラー通信を利用して管理サーバ6と情報のやり取りを行うようにしたが、無線LAN通信を利用するようにしてもよい。また、セルラー通信の代わりに有線ネットワークを利用するようにしてもよい。
次に、第1実施形態に係る管理サーバ6の概略構成について説明する。図6は、管理サーバ6の概略構成を示すブロック図である。
管理サーバ6は、通信部71と、記憶部72と、制御部73と、を備えている。
通信部71は、ネットワークに接続され、ネットワークおよびセルラー通信の基地局7を介して車載端末3および路側機5と情報をやり取りする。
記憶部72は、制御部73を構成するプロセッサで実行されるプログラムなどを記憶する。また、記憶部72は、歩行者端末1から収集した歩行者情報(位置情報および属性情報など)を記憶する。
制御部73は、歩行者情報管理部81と、分析処理部82と、システム管理部83と、を備えている。この制御部73は、プロセッサで構成され、制御部73の各部は、記憶部72に記憶されたプログラムをプロセッサで実行することで実現される。
歩行者情報管理部81は、歩行者端末1から収集した歩行者情報を管理する。
分析処理部82は、通行遅滞状態となった歩行者の歩行者情報に基づいて、支援対象者が通行に手間取る場所(通行遅滞地点)を設定して、各種の分析を行う。この分析結果は、支援対象者の通行を支援するシステムに活用することができる。
システム管理部83は、本通信システムを構成する各装置の動作を管理し、例えば、歩行者端末1に対して、メッセージの送信などの各種の動作に関する指示を行う。
なお、本実施形態では、歩行者端末1において通行遅滞状態の判定を行うようにしたが、管理サーバ6において通行遅滞状態の判定を行うようにしてもよい。この場合、支援対象者である歩行者の歩行者端末1から定期的に位置情報を管理サーバ6に送信すればよい。
また、管理サーバ6がダイナミックマップ(統合型地図情報)を管理するものとして、管理サーバ6からダイナミックマップを歩行者端末1や車載端末3に配信するようにしてもよい。この場合、歩行者の通行遅滞状態などに関する情報は、例えば準静的情報としてダイナミックマップに登録することができる。
なお、ダイナミックマップでは、各種の情報が、情報の更新頻度に応じて階層化されて登録される。具体的には、静的情報と準静的情報と準動的情報と動的情報との4つの階層がある。静的情報は、例えば1ヶ月程度の間隔で更新される情報であり、例えば路面情報、車線情報および3次元構造物に関する情報などが含まれる。準静的情報は、例えば1時間程度の間隔で更新される情報であり、例えば交通規制情報、道路工事情報および広域気象情報などが含まれる。準動的情報は、例えば1分間程度の間隔で更新される情報であり、例えば事故情報、渋滞情報および狭域気象情報などが含まれる。動的情報は、例えば1秒間程度の間隔で更新される情報であり、例えば周辺車両情報、歩行者情報および信号情報などITSの先読み情報などが含まれる。このダイナミックマップは、自動運転(自律走行、運転支援)において、車両を安全かつ迅速に目標地点まで移動させるために利用される。
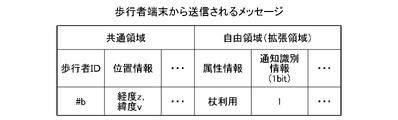
次に、第1実施形態に係る歩行者端末1から送信されるメッセージについて説明する。図7は、歩行者端末1から送信されるメッセージの内容を示す説明図である。
歩行者端末1では、メッセージ制御部21において、ITS通信(歩車間通信および歩路間通信)のメッセージを生成して、そのメッセージをITS通信部12から送信する。このメッセージは、ITS通信のメッセージのフォーマットにしたがって生成され、メッセージには、所定の情報を格納する共通領域と、ユーザが任意の情報を格納することができる自由領域(拡張領域)とがある。
共通領域には、歩行者ID(歩行者端末1の端末ID)、自装置の位置情報(経度および緯度)などの所定の情報が格納される。また、本実施形態では、自由領域に、歩行者属性情報および通知識別情報などが格納される。
歩行者属性情報は、利用者が高齢者であることや、利用者が杖を利用していることや、車椅子を利用していることを表す情報である。
通知識別情報は、車載端末3や路側機5において、歩行者端末1から送信されるメッセージを受信した際に、メッセージが危険行動通知と通行遅滞通知とのいずれであるかを識別する情報であり、歩行者が危険行動を行った場合には「0」となり、歩行者が通行遅滞状態であるには「1」となる。
次に、第1実施形態に係る歩行者端末1の動作手順について説明する。図8は、歩行者端末1の動作手順を示すフロー図である。
歩行者端末1では、まず、測位部11において、自歩行者の位置情報を取得する(ST101)。次に、危険行動判定部24において、自歩行者が危険行動をとったか否かを判定する(ST102)。
ここで、自歩行者が危険行動をとった場合には(ST102でYes)、メッセージ制御部21において、危険行動通知のメッセージを生成してITS通信部12から送信する(ST103)。
一方、自歩行者が危険行動をとっていない場合には(ST102でNo)、次に、支援対象者判定部25において、自歩行者が支援対象者(高齢者など)に該当するか否かを判定する(ST104)。
ここで、自歩行者が支援対象者である場合には(ST104でYes)、次に、通行遅滞状態判定部26において、現在の移動状態情報を取得する(ST105)。そして、現在の移動状態情報に基づいて、自歩行者が通行遅滞状態であるか否かを判定する(ST106)。
ここで、自歩行者が通行遅滞状態である場合には(ST106でYes)、メッセージ制御部21において、通行遅滞通知のメッセージを生成してITS通信部12から送信する(ST107)。
一方、自歩行者が支援対象者でない場合や(ST104でNo)、自歩行者が通行遅滞状態でない場合には(ST106でNo)、メッセージはなにも送信されない。
なお、車載端末3や路側機5では、歩行者端末1から通行遅滞通知のメッセージを受信すると、そのメッセージに含まれる情報、すなわち、歩行者ID、位置情報(経度、緯度)、歩行者属性情報(杖利用など)を通行遅滞情報として管理サーバ6に送信する。
(第2実施形態)
次に、第2実施形態について説明する。なお、ここで特に言及しない点は前記の実施形態と同様である。
前記の実施形態では、支援対象者に該当する歩行者が通行遅滞状態である場合に、その歩行者の情報を管理サーバ6に提供するようにしたが、歩行者自身の事情により、その場所から動かない場合も通行遅滞状態となる。特に、ある場所に歩行者が長時間滞留している場合には、歩行者が体調不良のためにその場所から動けない状態の可能性が高い。
そこで、本実施形態では、歩行者が同じ場所に長時間滞留している場合には、その旨の情報を管理サーバ6に提供する。具体的には、通行遅滞通知のメッセージに、自歩行者が長時間滞留状態であることを表す滞留状態情報を付加して送信する。これにより、管理サーバ6において、歩行者の長時間滞留状態に関する情報を収集することができ、この情報を支援対象者の保護者(家族など)に提供することで、高齢者等の支援対象者の見守りに活用することができる。
次に、第2実施形態に係る歩行者端末1の概略構成について説明する。図9は、歩行者端末1の概略構成を示すブロック図である。
歩行者端末1の制御部15は、滞留状態判定部27を備えている。その他は第1実施形態(図3参照)と同様である。
滞留状態判定部27は、測位部11で取得した自歩行者の位置情報に基づいて、自歩行者が長時間滞留状態であるか否か、すなわち、ある場所に長時間滞留しているか否かを判定する。具体的には、自歩行者が同一地点に所定時間以上継続して滞留した場合に長時間滞留状態と判定する。
メッセージ制御部21は、支援対象者判定部25において自歩行者が支援対象者と判定され、かつ、通行遅滞状態判定部26において自歩行者が通行遅滞状態であると判定されると、通行遅滞通知のメッセージをITS通信部12から送信する。このとき、滞留状態判定部27において自歩行者が長時間滞留状態であると判定されると、自歩行者が長時間滞留状態であることを表す滞留状態情報を、通行遅滞通知のメッセージに付加する。
次に、第2実施形態に係る歩行者端末1から送信されるメッセージについて説明する。図10は、歩行者端末1から送信されるメッセージの内容を示す説明図である。
本実施形態では、メッセージの自由領域に、歩行者属性情報および通知識別情報の他に、滞留状態情報が格納される。この滞留状態情報は、自歩行者が長時間滞留状態である場合には「1」となり、自歩行者が長時間滞留状態でない場合には「0」となる。
(第3実施形態)
次に、第3実施形態について説明する。なお、ここで特に言及しない点は前記の実施形態と同様である。
前記の実施形態では、高齢者、身体の不自由な人、車椅子を利用している人などを支援対象者として、その支援対象者に該当する歩行者が通行遅滞状態である場合に、その歩行者の情報を管理サーバ6に提供するようにしたが、本実施形態では、外国人を支援対象者として、外国人である歩行者が通行遅滞状態である場合に、その歩行者の情報(位置情報、属性情報など)を管理サーバ6に提供する。
これにより、管理サーバ6では、外国人である歩行者の情報を収集して、外国人を対象にした分析を行うことができる。例えば、統計処理により、外国人である歩行者が頻繁に通行遅滞状態となる地点を抽出して、その地点の周辺状況を検討することで、道路の案内設備(例えば案内板や交通標識など)が外国人にわかりにくいなどの知見を得ることができ、このような分析結果を、外国人を対象にした案内業務や案内設備の整備などに活用することができる。
次に、第3実施形態に係る歩行者端末1から送信されるメッセージについて説明する。図11は、歩行者端末1から送信されるメッセージの内容を示す説明図である。
本実施形態では、前記の実施形態と同様に、メッセージの自由領域に歩行者属性情報が格納されるが、この歩行者属性情報には、杖を利用する等の他に、自歩行者の国籍情報が含まれる。この国籍情報は、歩行者登録操作の際に予め記憶部14に記憶されており、メッセージ制御部21では、記憶部14から国籍情報を取得して、その国籍情報を通行遅滞通知のメッセージに付加する。
なお、国籍情報は、歩行者が邦人(例えば日本人)と外国人とのいずれであるかに関する情報(1bit)とすればよいが、国籍がある国を識別する情報(2bit以上)としてもよい。
(第4実施形態)
次に、第4実施形態について説明する。なお、ここで特に言及しない点は前記の実施形態と同様である。
前記の実施形態では、支援対象者に該当する歩行者が通行遅滞状態である場合に、その歩行者の情報を管理サーバ6に提供するようにし、特に第2実施形態では、ある場所に歩行者が長時間滞留している場合に、歩行者が体調不良の可能性が高いことから、長時間滞留情報を管理サーバ6に送信するようにしたが、特に問題とならない事情で、歩行者が同じ場所に長時間滞留している場合がある。例えば、踏切で遮断機が開くのを待っている場合や、信号機が青信号に変わるのを待っている場合や、バス停でバスの到着を待っている場合には、歩行者が同じ場所から長時間動かない状態となる。このような場合も通行遅滞状態とすると、誤った分析が行われ、また、分析結果の精度が低下する。
そこで、本実施形態では、歩行者が長時間待たされる可能性がある地点(例えば踏切、信号機のある横断歩道、バス停など)を通知除外地点として地図情報に登録し、自歩行者が通知除外地点にいる場合には、通知対象から除外する。すなわち、自歩行者が、支援対象者に該当し、かつ、通行遅滞状態である場合でも、自歩行者の現在位置が通知除外地点である場合には、通行遅滞通知のメッセージを送信しない。
次に、第4実施形態に係る歩行者端末1の概略構成について説明する。図12は、歩行者端末1の概略構成を示すブロック図である。
歩行者端末1の制御部15は、通知除外地点判定部28を備えている。その他は第1実施形態(図3参照)と同様である。
通知除外地点判定部28は、測位部11で取得した歩行者の位置情報と、記憶部14に記憶された地図情報とに基づいて、自歩行者の現在位置が通知除外地点か否かを判定する。この通知除外地点判定部28において自歩行者の現在位置が通知除外地点であると判定されると、通行遅滞通知のメッセージは送信されない。
次に、第4実施形態に係る歩行者端末1の動作手順について説明する。図13は、歩行者端末1の動作手順を示すフロー図である。
歩行者端末1では、まず、測位部11において、自歩行者の位置情報を取得する(ST101)。次に、危険行動判定部24において、自歩行者が危険行動をとったか否かを判定する(ST102)。
ここで、自歩行者が危険行動をとった場合には(ST102でYes)、メッセージ制御部21において、危険行動通知のメッセージを生成してITS通信部12から送信する(ST103)。
一方、自歩行者が危険行動をとっていない場合には(ST102でNo)、次に、支援対象者判定部25において、自歩行者が支援対象者(高齢者など)に該当するか否かを判定する(ST104)。
ここで、自歩行者が支援対象者である場合には(ST104でYes)、次に、通行遅滞状態判定部26において、現在の移動状態情報を取得する(ST105)。そして、現在の移動状態情報に基づいて、自歩行者が通行遅滞状態であるか否かを判定する(ST106)。
ここで、自歩行者が通行遅滞状態である場合には(ST106でYes)、次に、通知除外地点判定部28において、自歩行者の現在位置が通知除外地点か否かを判定する(ST111)。
ここで、自歩行者の現在位置が通知除外地点でない場合には(ST111でNo)、メッセージ制御部21において、通行遅滞通知のメッセージを生成してITS通信部12から送信する(ST107)。
一方、自歩行者が支援対象者でない場合や(ST104でNo)、自歩行者が通行遅滞状態でない場合や(ST106でNo)、自歩行者の現在位置が通知除外地点である場合には(ST111でYes)、メッセージはなにも送信されない。
(第5実施形態)
次に、第5実施形態について説明する。なお、ここで特に言及しない点は前記の実施形態と同様である。
前記の実施形態では、支援対象者に該当する歩行者が通行遅滞状態である場合に、その歩行者の情報を管理サーバ6に送信するようにしたが、本実施形態では、支援対象者に該当する歩行者が通行遅滞状態である場合でも、その歩行者の近傍に知人(家族や友人など)がいる場合には、その歩行者の情報を管理サーバ6に送信しないようにする。
歩行者の近傍に知人がいる場合には、立ち止まってその知人と会話していたり、その知人と会話しながらゆっくりと歩行していたりする可能性が高い。この場合、歩行者の移動状態が緩慢となるため、歩行者が通行遅滞状態と判定される。しかしながら、この場合、道路状況と関係ない要因で時間がかかっているに過ぎないため、歩行者が通行遅滞状態であることの通知は適切でなく、管理サーバ6で誤った分析が行われる。そこで、本実施形態では、歩行者の近傍に知人がいる場合には、通行遅滞状態と判定された場合でも、通知の対象外として、通行遅滞通知のメッセージを送信しない。
次に、第5実施形態に係る歩行者端末1の概略構成について説明する。図14は、歩行者端末1の概略構成を示すブロック図である。
歩行者端末1は、近距離通信部16を備えている。また、歩行者端末1の制御部15は、登録者近接判定部29を備えている。その他は第1実施形態(図3参照)と同様である。
近距離通信部16は、他の歩行者端末1との間でBluetooth(登録商標)などの近距離通信を行う。本実施形態では、近傍に存在する他の歩行者端末1との間で端末ID(ユーザID)を交換する。
記憶部14は、自歩行者の知人となる歩行者が所持する他の歩行者端末1の端末ID(ユーザID)を事前に登録する操作に応じて、その知人となる歩行者の歩行者端末1の端末IDを記憶する。
登録者近接判定部29は、自歩行者の近傍に、その歩行者の知人となる別の歩行者(登録者)がいるか否かを判定する。具体的には、近距離通信部16により、近傍にある他の歩行者端末1からその歩行者端末1の端末IDを取得すると、その端末IDが、予め登録された端末IDと一致するか否かを判定し、端末IDが一致する場合には、自歩行者の近傍に登録者(知人)がいると判定する。
なお、本実施形態では、他の歩行者端末1との間で近距離通信により端末IDを交換するようにしたが、歩行者端末1のITS通信部12では、他の歩行者端末1からブロードキャストで送信されるメッセージを受信できるため、そのメッセージに含まれる端末IDと歩行者の位置情報とに基づいて、知人となる別の歩行者が近傍にいるか否かを判定するようにしてもよい。
次に、第5実施形態に係る歩行者端末1の動作手順について説明する。図15は、歩行者端末1の動作手順を示すフロー図である。
歩行者端末1では、まず、測位部11において、自歩行者の位置情報を取得する(ST101)。次に、危険行動判定部24において、自歩行者が危険行動をとったか否かを判定する(ST102)。
ここで、自歩行者が危険行動をとった場合には(ST102でYes)、メッセージ制御部21において、危険行動通知のメッセージを生成してITS通信部12から送信する(ST103)。
一方、自歩行者が危険行動をとっていない場合には(ST102でNo)、次に、支援対象者判定部25において、自歩行者が支援対象者(高齢者など)に該当するか否かを判定する(ST104)。
ここで、自歩行者が支援対象者である場合には(ST104でYes)、次に、通行遅滞状態判定部26において、現在の移動状態情報を取得する(ST105)。そして、現在の移動状態情報に基づいて、自歩行者が通行遅滞状態であるか否かを判定する(ST106)。
ここで、自歩行者が通行遅滞状態である場合には(ST106でYes)、次に、登録者近接判定部29において、自歩行者の近傍に登録者(知人)がいるか否かを判定する(ST121)。
ここで、自歩行者の近傍に登録者がいない場合には(ST121でNo)、メッセージ制御部21において、通行遅滞通知のメッセージを生成してITS通信部12から送信する(ST107)。
一方、自歩行者が支援対象者でない場合や(ST104でNo)、自歩行者が通行遅滞状態でない場合や(ST106でNo)、自歩行者の近傍に登録者がいる場合には(ST121でYes)、メッセージはなにも送信されない。
なお、ある場所に歩行者が長時間滞留している場合でも、その歩行者の近傍に知人(家族や友人など)がいる場合には、立ち止まってその知人と会話している可能性が高いため、その歩行者の情報を支援対象者の保護者(家族など)に提供はしない。
(第6実施形態)
次に、第6実施形態について説明する。なお、ここで特に言及しない点は前記の実施形態と同様である。
第5実施形態では、歩行者端末1において、自歩行者の近傍に知人(登録者)がいるか否かを判定し、自歩行者の近傍に知人がいる場合には、自歩行者が通行遅滞状態でも、通行遅滞通知のメッセージを送信しないようにしたが、本実施形態では、管理サーバ6から歩行者端末1に通知停止指示を送信して、歩行者端末1において通行遅滞通知のメッセージを送信しないように制御する。
次に、第6実施形態に係る歩行者端末1の動作手順について説明する。図16は、歩行者端末1の動作手順を示すフロー図である。
歩行者端末1では、まず、測位部11において、自歩行者の位置情報を取得する(ST101)。次に、危険行動判定部24において、自歩行者が危険行動をとったか否かを判定する(ST102)。
ここで、自歩行者が危険行動をとった場合には(ST102でYes)、メッセージ制御部21において、危険行動通知のメッセージを生成してITS通信部12から送信する(ST103)。
一方、自歩行者が危険行動をとっていない場合には(ST102でNo)、次に、支援対象者判定部25において、自歩行者が支援対象者(高齢者など)に該当するか否かを判定する(ST104)。
ここで、自歩行者が支援対象者である場合には(ST104でYes)、次に、通行遅滞状態判定部26において、現在の移動状態情報を取得する(ST105)。そして、現在の移動状態情報に基づいて、自歩行者が通行遅滞状態であるか否かを判定する(ST106)。
ここで、自歩行者が通行遅滞状態である場合には(ST106でYes)、次に、管理サーバ6からの通知停止指示を受信したか否かを判定する(ST131)。
ここで、管理サーバ6からの通知停止指示を受信していない(ST131でNo)、メッセージ制御部21において、通行遅滞通知のメッセージを生成してITS通信部12から送信する(ST107)。
一方、自歩行者が支援対象者でない場合や(ST104でNo)、自歩行者が通行遅滞状態でない場合や(ST106でNo)、管理サーバ6からの通知停止指示を受信している場合には(ST131でYes)、メッセージはなにも送信されない。
次に、第6実施形態に係る管理サーバ6の動作手順について説明する。図17は、管理サーバ6の動作手順を示すフロー図である。
管理サーバ6では、まず、歩行者端末1からの通行遅滞情報を受信すると(ST201でYes)、通行遅滞情報を受信した歩行者端末1が複数あるか否かを判定する(ST202)。
ここで、通行遅滞情報を受信した歩行者端末1が複数ある場合には(ST202でYes)、次に、通行遅滞情報を受信した歩行者端末1が互いに近接しているか否かを判定する(ST203)。具体的には、複数の歩行者端末1の間の距離が所定値未満か否かを判定する。
ここで、通行遅滞情報を受信した歩行者端末1が互いに近接している場合には(ST203でYes)、通行遅滞通知を行わないように指示する通知停止指示を、歩行者端末1に送信する(ST204)。あるいは、通行遅滞情報を受信した歩行者端末1が互いに同じような行動履歴の場合に、通行遅滞通知を行わないように指示する通知停止指示を、歩行者端末1に送信してもよい。
歩行者端末1からの通行遅滞情報を受信しない場合や(ST201でNo)、通行遅滞情報を受信した歩行者端末1が1つしかない場合や(ST202でNo)、通行遅滞情報を受信した歩行者端末1が互いに近接していない場合には(ST203でNo)、特に処理は行われない。
なお、本実施形態では、複数の歩行者端末1から通行遅滞情報を受信し、かつ、その複数の歩行者端末1が互いに近接している場合に、管理サーバ6から通知停止指示を歩行者端末1に送信するようにしたが、知人として登録された歩行者の端末ID(ユーザID)を管理サーバ6で記憶し、近接する歩行者端末1が知人のものか否かを判定して、近接する歩行者端末1が知人のものである場合に、通知停止指示を歩行者端末1に送信するようにしてもよい。
(第7実施形態)
次に、第7実施形態について説明する。なお、ここで特に言及しない点は前記の実施形態と同様である。
前記の実施形態では、支援対象者に該当する歩行者が通行遅滞状態である場合に、その歩行者の情報を管理サーバ6に送信するようにしたが、本実施形態では、支援対象者に該当する歩行者が、通行遅滞状態でない場合に、過去に支援対象者が通行遅滞状態となった地点(通行遅滞地点)にいる場合には、その歩行者を比較対象者として、その歩行者の情報(位置情報、属性情報)を管理サーバ6に送信する。
本実施形態では、まず、管理サーバ6において、過去に支援対象者が通行遅滞状態となった地点(通行遅滞地点)の位置情報を蓄積し、この通行遅滞地点の位置情報を歩行者端末1に提供する。
歩行者端末1は、支援対象者に該当する自歩行者が、通行遅滞状態となると、自歩行者の情報(位置情報および属性情報)を管理サーバ6に送信する。具体的には、通行遅滞通知のメッセージをITS通信で送信する。また、通行遅滞状態でない場合でも、現在位置が通行遅滞地点であれば、比較対象者として、自歩行者の情報を管理サーバ6に送信する。具体的には、比較対象通知のメッセージをITS通信で送信する。
これにより、管理サーバ6では、支援対象者に該当する歩行者の中で、通行遅滞状態となった歩行者の情報と、通行遅滞状態とならなかった歩行者(比較対象者)の情報とを収集することができる。そして、通行遅滞状態となった歩行者の情報と、通行遅滞状態とならなかった歩行者(比較対象者)の情報とを比較することで、通行遅滞状態が発生する原因を分析することができる。
このとき、歩行者の属性に着目して分析を行うと、通行遅滞地点でどのような属性の歩行者が通行遅滞状態となるかを把握することができる。例えば、道路に小さい段差がある場合、杖を利用している場合には問題なく通行できても、車椅子を利用している場合には、段差を通過するのに手間取る場合がある。このように同じ場所でも、歩行者の属性(杖利用、車椅子利用)に応じて、通行遅滞状態となる場合と通行遅滞状態とならない場合とがあり、このような相違点から、現場の問題点を把握することができる。また、支援対象者に対して、歩行者の属性に応じた適切な支援が可能になる。例えば、段差のある通行遅滞地点は、車椅子を利用していない歩行者には案内するが、車椅子を利用している歩行者には案内しないようにする。
また、気象条件に着目して分析を行うと、通行遅滞地点でどのような気象条件のときに通行遅滞状態が発生するかを把握することができる。例えば、通常は特に歩行に支障のない道路でも、降雨や降雪の最中やその直後では歩きにくい状態となる場合がある。具体的には、降雨中やその直後において、水溜りができるなどによって、歩きにくい状態となることがある。また、降雪中やその直後において、道に雪が溜まる場合や道が凍結するなどによって、歩きにくい状態となることがある。このように同じ場所でも、気象条件に応じて、通行遅滞状態となる場合と通行遅滞状態とならない場合とがあり、このような相違点から、現場の問題点を把握することができる。また、支援対象者に対して、最近の気象条件に応じた適切な支援が可能になる。例えば、特定の気象条件の場合に通行遅滞状態が発生する場所は、該当する気象条件の場合には案内しないようにする。
次に、第7実施形態に係る歩行者端末1から送信されるメッセージについて説明する。図18は、歩行者端末1から送信されるメッセージの内容を示す説明図である。
本実施形態では、自歩行者が比較対象者となる場合、比較対象通知のメッセージを送信する。この比較対象通知のメッセージでは、自由領域に、歩行者属性情報、通知識別情報、および滞留状態情報の他に、比較対象情報が格納される。この比較対象情報は、自歩行者が比較対象者である場合には「1」となり、自歩行者が比較対象者でない場合には「0」となる。
次に、第7実施形態に係る歩行者端末1の動作手順について説明する。図19は、歩行者端末1の動作手順を示すフロー図である。
歩行者端末1では、まず、測位部11において、自歩行者の位置情報を取得する(ST101)。次に、危険行動判定部24において、自歩行者が危険行動をとったか否かを判定する(ST102)。
ここで、自歩行者が危険行動をとった場合には(ST102でYes)、メッセージ制御部21において、危険行動通知のメッセージを生成してITS通信部12から送信する(ST103)。
一方、自歩行者が危険行動をとっていない場合には(ST102でNo)、次に、支援対象者判定部25において、自歩行者が支援対象者(高齢者など)に該当するか否かを判定する(ST104)。
ここで、自歩行者が支援対象者である場合には(ST104でYes)、次に、通行遅滞状態判定部26において、現在の移動状態情報を取得する(ST105)。そして、現在の移動状態情報に基づいて、自歩行者が通行遅滞状態であるか否かを判定する(ST106)。
ここで、自歩行者が通行遅滞状態である場合には(ST106でYes)、メッセージ制御部21において、通行遅滞通知のメッセージを生成してITS通信部12から送信する(ST107)。
一方、自歩行者が通行遅滞状態でない場合には(ST106でNo)、次に、自歩行者の現在位置が通行遅滞地点であるか否かを判定する(ST141)。
ここで、自歩行者の現在位置が通行遅滞地点である場合には(ST141でYes)、自歩行者を比較対象者として、メッセージ制御部21において、比較対象通知のメッセージを生成してITS通信部12から送信する(ST132)。
一方、自歩行者が支援対象者でない場合や(ST104でNo)、自歩行者が対象地点にいない場合には(ST141でNo)、メッセージはなにも送信されない。
(第8実施形態)
次に、第8実施形態について説明する。なお、ここで特に言及しない点は前記の実施形態と同様である。
第7実施形態では、支援対象者に該当する歩行者が、通行遅滞状態でない場合に、通行遅滞地点にいる場合には、その歩行者を比較対象者として、その歩行者の情報(位置情報、属性情報)を管理サーバ6に送信するようにしたが、本実施形態では、支援対象者に該当しない一般の歩行者を、通行遅滞地点にいることを条件に比較対象者として、その歩行者の情報(位置情報など)を管理サーバ6に送信する。
これにより、管理サーバ6では、支援対象者で通行遅滞状態となった歩行者の情報と、一般の歩行者の情報とを収集することができる。そして、支援対象者で通行遅滞状態となった歩行者の情報と、一般の歩行者の情報とを比較することで、通行遅滞状態を判定するしきい値(判定基準)の妥当性を評価することができ、これにより通行遅滞状態の判定精度を高めることができる。
次に、第8実施形態に係る歩行者端末1の動作手順について説明する。図20は、歩行者端末1の動作手順を示すフロー図である。
歩行者端末1では、まず、測位部11において、自歩行者の位置情報を取得する(ST101)。次に、危険行動判定部24において、自歩行者が危険行動をとったか否かを判定する(ST102)。
ここで、自歩行者が危険行動をとった場合には(ST102でYes)、メッセージ制御部21において、危険行動通知のメッセージを生成してITS通信部12から送信する(ST103)。
一方、自歩行者が危険行動をとっていない場合には(ST102でNo)、次に、支援対象者判定部25において、自歩行者が支援対象者(高齢者など)に該当するか否かを判定する(ST104)。
ここで、自歩行者が支援対象者である場合には(ST104でYes)、次に、通行遅滞状態判定部26において、現在の移動状態情報を取得する(ST105)。そして、現在の移動状態情報に基づいて、自歩行者が通行遅滞状態であるか否かを判定する(ST106)。
ここで、自歩行者が通行遅滞状態である場合には(ST106でYes)、メッセージ制御部21において、通行遅滞通知のメッセージを生成してITS通信部12から送信する(ST107)。
一方、自歩行者が支援対象者でない場合や(ST104でNo)、自歩行者が通行遅滞状態でない場合には(ST106でNo)、次に、自歩行者が通行遅滞地点にいるか否かを判定する(ST141)。
ここで、自歩行者が通行遅滞地点にいる場合には(ST141でYes)、自歩行者を比較対象者として、メッセージ制御部21において、比較対象通知のメッセージを生成してITS通信部12から送信する(ST132)。
一方、自歩行者が通行遅滞地点にいない場合には(ST141でNo)、メッセージはなにも送信されない。
(第9実施形態)
次に、第9実施形態について説明する。なお、ここで特に言及しない点は前記の実施形態と同様である。
前記の実施形態では、歩行者の移動状態情報(所定時間の移動距離)に基づいて通行遅滞状態の判定を行うようにしたが、本実施形態では、移動状態以外の歩行者の状態を検出する各種のセンサを歩行者端末1に設けて、そのセンサの検出結果を補助的に利用して通行遅滞状態の判定を行う。
次に、第9実施形態に係る歩行者端末1の概略構成について説明する。図21は、歩行者端末1の概略構成を示すブロック図である。
歩行者端末1は、環境センサ17と、モーションセンサ18と、生体センサ19と、を備えている。その他は第1実施形態(図3参照)と同様である。
歩行者端末1の通行遅滞状態判定部26は、歩行者の移動状態情報と、環境センサ17、モーションセンサ18および生体センサ19の各検出結果とに基づいて、自歩行者が通行遅滞状態であるか否かを判定する。
ここで、環境センサ17は、歩行者の環境状態を検出するものであり、例えば気圧センサとすると、その検出結果から測定される高度の変化状況に基づいて、歩行者が階段や坂道を通行していることを検知できる。
また、モーションセンサ18は、歩行者の身体の動きを検出するものであり、例えば加速度センサとすると、その検出結果による歩行者の動作の変化状況に基づいて、歩行者が階段や段差を通行していることを検知できる。
また、生体センサ19は、歩行者の身体状態を検出するものであり、例えば脈拍センサとすると、その検出結果から測定される心拍数の変化状況に基づいて、歩行者が苦労していることを検知できる。
なお、本実施形態では、環境センサ17、モーションセンサ18および生体センサ19を歩行者端末1に設けたが、これらのセンサ17~19を備えたウェアラブル端末を歩行者の身体に装着するようにしてもよい。この場合、特に生体センサの検出精度を高めることができる。
また、通行遅滞状態の判定結果のみを歩行者端末1から管理サーバ6に提供するようにしてもよいが、通行遅滞状態の判定結果に加えてセンサ17~19の検出結果も管理サーバ6に提供するようにしてもよい。また、歩行者の移動状態情報(所定時間の移動距離)とセンサ17~19の検出結果とを管理サーバ6に提供して、管理サーバ6において通行遅滞状態の判定を行うようにしてもよい。
歩行者の移動状態情報(所定時間の移動距離)とセンサ情報を併用する利点として、支援対象者が通行遅滞となる場所以外に、支援対象者に対して危険と思われる場所を避けた経路を案内することも可能である。例えば、比較的高速で歩道を走行する自転車が多い場所や、急に走り出すなどの行動をとる児童が多い場所などは、特に支援対象者に対して危険である。このような場面に支援対象者が直面すると、心拍数の変化などが生じると考えられるため、脈拍センサ情報などを収集することで、心拍数の変化などが生じる場所を避けた経路を案内することが可能である。また、歩行者の移動状態情報(所定時間の移動距離)とセンサ情報以外にも、自転車や児童の行動履歴情報や速度情報なども収集することで、更に精度よく支援対象者に対して危険と思われる場所を抽出することが可能となる。
(第10実施形態)
次に、第10実施形態について説明する。なお、ここで特に言及しない点は前記の実施形態と同様である。図22は、第10実施形態に係る通信システムの全体構成図である。
前記の実施形態では、支援対象者に該当する歩行者が、歩行する場合や車椅子を利用する場合に、通行に手間取っている状態(通行遅滞状態)になると、その歩行者の情報を管理サーバ6に提供するようにしたが、本実施形態では、支援対象者が車両を運転している場合に、運転に手間取っている状態(運転遅滞状態)になると、その運転者(車両)の情報を管理サーバ6に提供する。
車載端末3では、高齢者などの支援対象者に該当する運転者が運転する場合に、運転遅滞状態であるか否かを判定し、運転遅滞状態である場合には、運転者(車両)の情報(位置情報など)を管理サーバ6に送信する。なお、車載端末3から路側機を経由して管理サーバ6に送信するようにしてもよい。
また、車載端末3では、運転遅滞状態でなく、かつ、車両の現在位置が、過去に別の運転者が運転遅滞状態となった地点(運転遅滞地点)に一致する場合には、運転者を比較対象者として、その運転者(車両)の情報(位置情報など)を管理サーバ6に送信する。また、支援対象者に該当するか否かに関係なく、車両の現在位置が運転遅滞地点に一致する場合には、その運転者を比較対象者として、その運転者(車両)の情報(位置情報など)を管理サーバ6に送信する。
また、例えば交差点の右折や信号のない道路での右左折などのように右左折に時間を要する場所や、渋滞が多発する場所などにおいては、特に支援対象者は所要の運転がし難く、運転遅滞状態となる可能性が高い。このような場所では、所定場所に滞留する時間が長くなると思われる。このため、滞留時間が長い場所は避けた経路を、支援対象者に案内してもよい。
管理サーバ6では、支援対象者が運転する車両と、比較対象者が運転する車両とで、移動状態情報(所定時間の移動距離)を比較して、両者の差分が大きい場所を、支援対象者が運転し難い場所(運転遅滞地点)に設定して、各種の分析を行う。これにより、分析結果を、支援対象者の運転を支援するシステムに活用することができる。例えば、運転遅滞地点に関する情報を支援対象者に提供し、また、運転遅滞地点を除外した経路を支援対象者に案内することで、支援対象者が円滑に運転を行うことができる。
なお、本実施形態では、車載端末3において、自車両の運転者が支援対象者に該当するか否かを判別するため、運転者の属性情報や、運転者が支援対象者に該当する旨の情報を、車載端末3に登録するとよい。
また、本実施形態では、支援対象者が車両を運転している場合について説明したが、同様に自転車、自動二輪、シニアカー、電動車椅子などを運転している場合についても、本発明は同様に適用可能である。
以上のように、本出願において開示する技術の例示として、実施形態を説明した。しかしながら、本開示における技術は、これに限定されず、変更、置き換え、付加、省略などを行った実施形態にも適用できる。また、上記の実施形態で説明した各構成要素を組み合わせて、新たな実施形態とすることも可能である。