JP7150488B2 - 画像投射装置およびその制御方法 - Google Patents
画像投射装置およびその制御方法 Download PDFInfo
- Publication number
- JP7150488B2 JP7150488B2 JP2018108164A JP2018108164A JP7150488B2 JP 7150488 B2 JP7150488 B2 JP 7150488B2 JP 2018108164 A JP2018108164 A JP 2018108164A JP 2018108164 A JP2018108164 A JP 2018108164A JP 7150488 B2 JP7150488 B2 JP 7150488B2
- Authority
- JP
- Japan
- Prior art keywords
- time
- image
- image projection
- projection device
- projector
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N9/00—Details of colour television systems
- H04N9/12—Picture reproducers
- H04N9/31—Projection devices for colour picture display, e.g. using electronic spatial light modulators [ESLM]
- H04N9/3141—Constructional details thereof
- H04N9/3147—Multi-projection systems
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N9/00—Details of colour television systems
- H04N9/12—Picture reproducers
- H04N9/31—Projection devices for colour picture display, e.g. using electronic spatial light modulators [ESLM]
- H04N9/3141—Constructional details thereof
- H04N9/315—Modulator illumination systems
- H04N9/3155—Modulator illumination systems for controlling the light source
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B21/00—Projectors or projection-type viewers; Accessories therefor
- G03B21/14—Details
- G03B21/20—Lamp housings
- G03B21/206—Control of light source other than position or intensity
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G3/00—Control arrangements or circuits, of interest only in connection with visual indicators other than cathode-ray tubes
- G09G3/001—Control arrangements or circuits, of interest only in connection with visual indicators other than cathode-ray tubes using specific devices not provided for in groups G09G3/02 - G09G3/36, e.g. using an intermediate record carrier such as a film slide; Projection systems; Display of non-alphanumerical information, solely or in combination with alphanumerical information, e.g. digital display on projected diapositive as background
- G09G3/002—Control arrangements or circuits, of interest only in connection with visual indicators other than cathode-ray tubes using specific devices not provided for in groups G09G3/02 - G09G3/36, e.g. using an intermediate record carrier such as a film slide; Projection systems; Display of non-alphanumerical information, solely or in combination with alphanumerical information, e.g. digital display on projected diapositive as background to project the image of a two-dimensional display, such as an array of light emitting or modulating elements or a CRT
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N9/00—Details of colour television systems
- H04N9/12—Picture reproducers
- H04N9/31—Projection devices for colour picture display, e.g. using electronic spatial light modulators [ESLM]
- H04N9/3102—Projection devices for colour picture display, e.g. using electronic spatial light modulators [ESLM] using two-dimensional electronic spatial light modulators
- H04N9/312—Driving therefor
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N9/00—Details of colour television systems
- H04N9/12—Picture reproducers
- H04N9/31—Projection devices for colour picture display, e.g. using electronic spatial light modulators [ESLM]
- H04N9/3179—Video signal processing therefor
- H04N9/3182—Colour adjustment, e.g. white balance, shading or gamut
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N9/00—Details of colour television systems
- H04N9/12—Picture reproducers
- H04N9/31—Projection devices for colour picture display, e.g. using electronic spatial light modulators [ESLM]
- H04N9/3191—Testing thereof
- H04N9/3194—Testing thereof including sensor feedback
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G2320/00—Control of display operating conditions
- G09G2320/06—Adjustment of display parameters
- G09G2320/0626—Adjustment of display parameters for control of overall brightness
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Hardware Design (AREA)
- Theoretical Computer Science (AREA)
- Controls And Circuits For Display Device (AREA)
- Control Of Indicators Other Than Cathode Ray Tubes (AREA)
- Projection Apparatus (AREA)
- Transforming Electric Information Into Light Information (AREA)
- Video Image Reproduction Devices For Color Tv Systems (AREA)
Description
また、本発明の他の一側面としての画像投射装置は、他の画像投射装置と通信可能であり、第1の内部時刻を有する。該画像投射装置は、通信により他の画像投射装置が有する第2の内部時刻の情報を取得する時刻取得手段と、第1の内部時刻と第2の内部時刻との差を算出し、該差を用いて、第1の動作と第2の動作が行われる動作時刻を設定する制御手段とを有する。画像投射装置および他の画像投射装置はそれぞれ、映像信号に応じて画像投射を行うとともに、投射画像の輝度を取得する特徴量取得手段を有する。第1の動作および第2の動作はそれぞれ、画像投射装置および他の画像投射装置において画像投射光の光量または投射画像の色を輝度に応じて調整する動作であることを特徴とする。
また、本発明の他の一側面としての制御方法は、他の画像投射装置と通信可能であり、第1の 内部時刻を有する画像投射装置に適用される。該制御方法は、通信により他の画像投射装置が有する第2の内部時刻の情報を取得するステップと、第1の内部時刻と第2の内部時刻との差を算出し、該差を用いて、第1の動作と第2の動作が行われる動作時刻を設定するステップとを有する。画像投射装置および他の画像投射装置はそれぞれ、映像信号に応じて画像投射を行うとともに、投射画像の輝度を取得する。第1の動作および第2の動作はそれぞれ、画像投射装置および他の画像投射装置において画像投射光の光量または投射画像の色を輝度に応じて調整する動作であることを特徴とする。
例えば、T1=0として、スレーブ時刻がマスター時刻に対して5msだけずれていて(進んでいて)、マスタープロジェクタとスレーブプロジェクタ間でのコマンド送受信にそれぞれ1msの時間を要し、スレーブプロジェクタがマスタープロジェクタから時刻計測コマンドを受信してからスレーブ時刻情報を返信するまでに3msの時間だけ要したとする。この場合、T1=0、T2=5+1=6、T3=6+3=9、T4=5となり、これを式(1)に代入すると、
ΔT={(6-0)-(5-9)}/2=5
となり、スレーブ時刻がマスター時刻に対してΔT=5msだけずれている(進んでいる)ことが算出される。
(但し、mは1以上の整数)
式(2)は、スレーブ時刻としての垂直同期信号Vsyncのタイミングを表す一般式である。
Tvx=Tv1+n×Tvs (3)
(但し、nは1以上の整数)
また、同期時刻算出部250は、マスタープロジェクタの撮像部280がスレーブプロジェクタによる画像投射に同期して投射画像の撮像を行うマスター時刻であるマスター撮像時刻(第2の動作時刻)Tcxを以下の式(4)を用いて算出する。
Step-41にて投射時刻指定コマンドを受信したスレーブプロジェクタは、Step-45において、スレーブ投射時刻Tvxから所定の校正パターン画像を投射させるための動作(後述する投射準備動作および投射動作)を開始させる。
Tcx=Tv1+n×Tvs+ΔT (5)
(但し、nは1以上の整数)
マスタープロジェクタ(制御部210)は、Step-50aにおいて、マスター投射時刻Tvxから校正パターン画像を投射させるための動作(投射準備動作および投射動作)を開始させる。
Tb1=Ta1-ΔT
の関係を有する。
Tvs-ΔTs1+ΔTs2
だけ遅延させる。各プロジェクタにおける垂直同期信号Vsyncのタイミング制御は、上述したタイミング調整部(時刻取得手段およびタイミング制御手段)132が行う。
(その他の実施例)
本発明は、上述の実施形態の1以上の機能を実現するプログラムを、ネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサーがプログラムを読出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
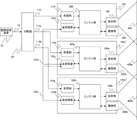
100a,100b スレーブプロジェクタ
210 制御部
160 投射部
280 撮像部
Claims (8)
- 他の画像投射装置と通信可能であり、第1の内部時刻を有する画像投射装置であって、
前記通信により前記他の画像投射装置が有する第2の内部時刻の情報を取得する時刻取得手段と、
前記第1の内部時刻と前記第2の内部時刻との差を算出し、該差を用いて、第1の動作と第2の動作が行われる動作時刻を設定する制御手段とを有し、
前記第1の動作は、前記画像投射装置および前記他の画像投射装置のうち一方の画像投射装置による画像投射であり、
前記第2の動作は、撮像手段による前記一方の画像投射装置からの投射画像の撮像、または、分光手段による前記一方の画像投射装置からの画像投射光の分光測定であることを特徴とする画像投射装置。 - 前記一方の画像投射装置は、入力された映像信号に応じて光源からの光を変調する光変調素子を線順次駆動走査方式または面順次駆動走査方式により駆動して投射画像を順次更新し、
前記動作時刻は、前記投射画像の各更新が完了する時刻であることを特徴とする請求項1に記載の画像投射装置。 - 他の画像投射装置と通信可能であり、第1の内部時刻を有する画像投射装置であって、
前記通信により前記他の画像投射装置が有する第2の内部時刻の情報を取得する時刻取得手段と、
前記第1の内部時刻と前記第2の内部時刻との差を算出し、該差を用いて、第1の動作と第2の動作が行われる動作時刻を設定する制御手段とを有し、
前記画像投射装置および前記他の画像投射装置はそれぞれ、映像信号に応じて画像投射を行うとともに、投射画像の輝度を取得する特徴量取得手段を有しており、
前記第1の動作および前記第2の動作はそれぞれ、前記画像投射装置および前記他の画像投射装置において画像投射光の光量または前記投射画像の色を前記輝度に応じて調整する動作であることを特徴とする画像投射装置。 - 前記他の画像投射装置は、所定周期を有するタイミング信号の発生ごとに投射画像を更新し、
前記動作時刻は、前記タイミング信号の発生時刻であることを特徴とする請求項1から3のいずれか一項に記載の画像投射装置。 - 前記制御手段は、前記第2の動作により得られた結果を用いて、前記画像投射装置および前記他の画像投射装置のうち少なくとも一方からの投射画像の輝度または色を調整することを特徴とする請求項1から4のいずれか一項に記載の画像投射装置。
- 他の画像投射装置と通信可能であり、第1の内部時刻を有する画像投射装置の制御方法であって、
前記通信により前記他の画像投射装置が有する第2の内部時刻の情報を取得するステップと、
前記第1の内部時刻と前記第2の内部時刻との差を算出し、該差を用いて、第1の動作と第2の動作が行われる動作時刻を設定するステップとを有し、
前記第1の動作は、前記画像投射装置および前記他の画像投射装置のうち一方の画像投射装置による画像投射であり、
前記第2の動作は、撮像手段による前記一方の画像投射装置からの投射画像の撮像、または、分光手段による前記一方の画像投射装置からの画像投射光の分光測定であることを特徴とする画像投射装置の制御方法。 - 他の画像投射装置と通信可能であり、第1の内部時刻を有する画像投射装置の制御方法であって、
前記通信により前記他の画像投射装置が有する第2の内部時刻の情報を取得するステップと、
前記第1の内部時刻と前記第2の内部時刻との差を算出し、該差を用いて、第1の動作と第2の動作が行われる動作時刻を設定するステップとを有し、
前記画像投射装置および前記他の画像投射装置はそれぞれ、映像信号に応じて画像投射を行うとともに、投射画像の輝度を取得し、
前記第1の動作および前記第2の動作はそれぞれ、前記画像投射装置および前記他の画像投射装置において画像投射光の光量または前記投射画像の色を前記輝度に応じて調整する動作であることを特徴とする画像投射装置の制御方法。 - 他の画像投射装置と通信可能であり、第1の内部時刻を有する画像投射装置のコンピュータに、請求項6または7に記載の制御方法に従う処理を実行させることを特徴とするコンピュータプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018108164A JP7150488B2 (ja) | 2018-06-05 | 2018-06-05 | 画像投射装置およびその制御方法 |
| US16/427,547 US10757381B2 (en) | 2018-06-05 | 2019-05-31 | Image projection apparatus and its control method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018108164A JP7150488B2 (ja) | 2018-06-05 | 2018-06-05 | 画像投射装置およびその制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019211645A JP2019211645A (ja) | 2019-12-12 |
| JP7150488B2 true JP7150488B2 (ja) | 2022-10-11 |
Family
ID=68693395
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018108164A Active JP7150488B2 (ja) | 2018-06-05 | 2018-06-05 | 画像投射装置およびその制御方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10757381B2 (ja) |
| JP (1) | JP7150488B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110087047B (zh) * | 2016-03-28 | 2021-05-14 | 麦克赛尔株式会社 | 投影型影像显示装置 |
| JP2019078786A (ja) * | 2017-10-20 | 2019-05-23 | セイコーエプソン株式会社 | 画像投射システム、プロジェクター、及び画像投射システムの制御方法 |
| AT524138A1 (de) * | 2020-09-02 | 2022-03-15 | Stops & Mops Gmbh | Verfahren zur Emulation eines mit einer Maske teilabgedeckten Scheinwerfers |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001054131A (ja) | 1999-05-31 | 2001-02-23 | Olympus Optical Co Ltd | カラー画像表示システム |
| JP2012147225A (ja) | 2011-01-12 | 2012-08-02 | Seiko Epson Corp | プロジェクター、プロジェクターシステム、プロジェクターのデータ出力方法およびプロジェクターシステムのデータ出力方法 |
| JP2016133608A (ja) | 2015-01-19 | 2016-07-25 | キヤノン株式会社 | 表示装置、表示システム及び表示方法 |
| JP2017200060A (ja) | 2016-04-27 | 2017-11-02 | キヤノン株式会社 | 投影型表示装置及びその制御方法 |
| JP2018036478A (ja) | 2016-08-31 | 2018-03-08 | 株式会社リコー | 画像投影システム、情報処理装置、画像投影方法及びプログラム |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5404989B2 (ja) | 2005-12-28 | 2014-02-05 | パナソニック株式会社 | 映像表示装置およびマルチディスプレイ装置 |
| KR101713366B1 (ko) * | 2010-09-10 | 2017-03-07 | 인텔 코포레이션 | 이미지 투사 방법 및 장치 |
| JP2016004086A (ja) | 2014-06-13 | 2016-01-12 | 株式会社リコー | 画像投影装置、画像投影方法、及び、マルチプロジェクションシステム |
| JP6798108B2 (ja) | 2016-01-20 | 2020-12-09 | セイコーエプソン株式会社 | 画像投射システム、及び、画像投射システムの制御方法 |
| JP7015981B2 (ja) | 2016-02-02 | 2022-02-04 | パナソニックIpマネジメント株式会社 | 投写画像調整システム及び投写画像調整方法 |
| JP6840980B2 (ja) | 2016-10-13 | 2021-03-10 | 株式会社リコー | 電子機器、表示システム、時刻同期方法、及びプログラム |
| JP6946647B2 (ja) * | 2017-01-11 | 2021-10-06 | セイコーエプソン株式会社 | 表示装置および制御方法 |
-
2018
- 2018-06-05 JP JP2018108164A patent/JP7150488B2/ja active Active
-
2019
- 2019-05-31 US US16/427,547 patent/US10757381B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001054131A (ja) | 1999-05-31 | 2001-02-23 | Olympus Optical Co Ltd | カラー画像表示システム |
| JP2012147225A (ja) | 2011-01-12 | 2012-08-02 | Seiko Epson Corp | プロジェクター、プロジェクターシステム、プロジェクターのデータ出力方法およびプロジェクターシステムのデータ出力方法 |
| JP2016133608A (ja) | 2015-01-19 | 2016-07-25 | キヤノン株式会社 | 表示装置、表示システム及び表示方法 |
| JP2017200060A (ja) | 2016-04-27 | 2017-11-02 | キヤノン株式会社 | 投影型表示装置及びその制御方法 |
| JP2018036478A (ja) | 2016-08-31 | 2018-03-08 | 株式会社リコー | 画像投影システム、情報処理装置、画像投影方法及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019211645A (ja) | 2019-12-12 |
| US10757381B2 (en) | 2020-08-25 |
| US20190373228A1 (en) | 2019-12-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6701669B2 (ja) | 画像投射システム、プロジェクター、及び、画像投射システムの制御方法 | |
| US7692866B2 (en) | Display systems with and methods for multiple source colour illumination | |
| US20040140982A1 (en) | Image projection with display-condition compensation | |
| JP2013238780A (ja) | 画像投影装置及びその制御方法並びにプログラム | |
| JP7150488B2 (ja) | 画像投射装置およびその制御方法 | |
| CN103543581B (zh) | 投影仪及投影仪的发光控制方法 | |
| WO2010116837A1 (ja) | マルチプロジェクションディスプレイシステム及び画面形成方法 | |
| JP2005020581A (ja) | 画像表示装置における補正データ取得方法およびキャリブレーションシステム | |
| US11303862B2 (en) | Projector, display system, image correction method, and colorimetric method | |
| HK1231656A1 (zh) | 一种投影仪的控制方法及适用於该方法的投影仪 | |
| CN101448166A (zh) | 背投装置和多显示系统 | |
| JP2017129728A (ja) | 画質補正方法、及び、画像投射システム | |
| JP2012003213A (ja) | 投写型表示装置 | |
| JP2012018214A (ja) | 投写型映像表示装置 | |
| US11323673B2 (en) | Method for operating control apparatus, and projector | |
| JP5082137B2 (ja) | 投射型画像表示装置、画像表示システム、および色むら補正方法 | |
| JP2016111689A (ja) | 画像読取装置 | |
| JP2003018502A (ja) | 投射型表示装置 | |
| JP6665543B2 (ja) | プロジェクター、及び、撮像画像の補正方法 | |
| JP6565224B2 (ja) | プロジェクター、及び、プロジェクターの制御方法 | |
| JP6813037B2 (ja) | プロジェクター、表示システム、プロジェクターの制御方法、及び画像補正方法 | |
| JP2009109962A (ja) | リアプロジェクタ装置及びマルチディスプレイシステム | |
| JP6866915B2 (ja) | 画像投射システム、及び画像投射システムの制御方法 | |
| JP2008310156A (ja) | リアプロジェクタ装置 | |
| JP2020113811A (ja) | 測色方法、画像表示方法、測色装置、画像表示装置及び画像表示システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210524 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220328 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220405 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220602 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220614 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220805 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220830 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220928 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7150488 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |