JP7114635B2 - カテーテル用ハンドルおよびそれを備えたカテーテル - Google Patents
カテーテル用ハンドルおよびそれを備えたカテーテル Download PDFInfo
- Publication number
- JP7114635B2 JP7114635B2 JP2019568858A JP2019568858A JP7114635B2 JP 7114635 B2 JP7114635 B2 JP 7114635B2 JP 2019568858 A JP2019568858 A JP 2019568858A JP 2019568858 A JP2019568858 A JP 2019568858A JP 7114635 B2 JP7114635 B2 JP 7114635B2
- Authority
- JP
- Japan
- Prior art keywords
- rotating member
- handle
- wire
- catheter
- space
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000005192 partition Methods 0.000 claims description 50
- 239000004020 conductor Substances 0.000 claims description 25
- 238000003780 insertion Methods 0.000 claims description 12
- 230000037431 insertion Effects 0.000 claims description 12
- 238000013459 approach Methods 0.000 claims description 6
- 238000000638 solvent extraction Methods 0.000 claims description 5
- WABPQHHGFIMREM-UHFFFAOYSA-N lead(0) Chemical compound [Pb] WABPQHHGFIMREM-UHFFFAOYSA-N 0.000 description 10
- 229920003002 synthetic resin Polymers 0.000 description 9
- 239000000057 synthetic resin Substances 0.000 description 9
- -1 polyethylene Polymers 0.000 description 8
- 229920005989 resin Polymers 0.000 description 6
- 239000011347 resin Substances 0.000 description 6
- 229910045601 alloy Inorganic materials 0.000 description 5
- 239000000956 alloy Substances 0.000 description 5
- 229910052751 metal Inorganic materials 0.000 description 5
- 239000002184 metal Substances 0.000 description 5
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 4
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 4
- YCKRFDGAMUMZLT-UHFFFAOYSA-N Fluorine atom Chemical compound [F] YCKRFDGAMUMZLT-UHFFFAOYSA-N 0.000 description 3
- 239000004677 Nylon Substances 0.000 description 3
- 239000004698 Polyethylene Substances 0.000 description 3
- 239000004743 Polypropylene Substances 0.000 description 3
- HZEWFHLRYVTOIW-UHFFFAOYSA-N [Ti].[Ni] Chemical compound [Ti].[Ni] HZEWFHLRYVTOIW-UHFFFAOYSA-N 0.000 description 3
- 238000005452 bending Methods 0.000 description 3
- 210000004204 blood vessel Anatomy 0.000 description 3
- 229920001971 elastomer Polymers 0.000 description 3
- 229920000840 ethylene tetrafluoroethylene copolymer Polymers 0.000 description 3
- 239000011737 fluorine Substances 0.000 description 3
- 229910052731 fluorine Inorganic materials 0.000 description 3
- 229910001000 nickel titanium Inorganic materials 0.000 description 3
- 229920001778 nylon Polymers 0.000 description 3
- 229920011301 perfluoro alkoxyl alkane Polymers 0.000 description 3
- 229920006122 polyamide resin Polymers 0.000 description 3
- 229920000573 polyethylene Polymers 0.000 description 3
- 229920005672 polyolefin resin Polymers 0.000 description 3
- 229920001155 polypropylene Polymers 0.000 description 3
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 3
- 239000004810 polytetrafluoroethylene Substances 0.000 description 3
- 238000003825 pressing Methods 0.000 description 3
- 229910001220 stainless steel Inorganic materials 0.000 description 3
- 229910000975 Carbon steel Inorganic materials 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- 239000004696 Poly ether ether ketone Substances 0.000 description 2
- 239000004721 Polyphenylene oxide Substances 0.000 description 2
- PPBRXRYQALVLMV-UHFFFAOYSA-N Styrene Chemical compound C=CC1=CC=CC=C1 PPBRXRYQALVLMV-UHFFFAOYSA-N 0.000 description 2
- 206010003119 arrhythmia Diseases 0.000 description 2
- 230000006793 arrhythmia Effects 0.000 description 2
- 125000003118 aryl group Chemical group 0.000 description 2
- JUPQTSLXMOCDHR-UHFFFAOYSA-N benzene-1,4-diol;bis(4-fluorophenyl)methanone Chemical compound OC1=CC=C(O)C=C1.C1=CC(F)=CC=C1C(=O)C1=CC=C(F)C=C1 JUPQTSLXMOCDHR-UHFFFAOYSA-N 0.000 description 2
- 239000010962 carbon steel Substances 0.000 description 2
- 239000011162 core material Substances 0.000 description 2
- 239000000806 elastomer Substances 0.000 description 2
- 230000012447 hatching Effects 0.000 description 2
- 239000011810 insulating material Substances 0.000 description 2
- 229910052742 iron Inorganic materials 0.000 description 2
- 239000007769 metal material Substances 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 229920009441 perflouroethylene propylene Polymers 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 229910052697 platinum Inorganic materials 0.000 description 2
- 229920001225 polyester resin Polymers 0.000 description 2
- 239000004645 polyester resin Substances 0.000 description 2
- 229920000570 polyether Polymers 0.000 description 2
- 229920002530 polyetherether ketone Polymers 0.000 description 2
- 229920001721 polyimide Polymers 0.000 description 2
- 239000009719 polyimide resin Substances 0.000 description 2
- 229920000346 polystyrene-polyisoprene block-polystyrene Polymers 0.000 description 2
- 239000010935 stainless steel Substances 0.000 description 2
- 229920006132 styrene block copolymer Polymers 0.000 description 2
- 229920001935 styrene-ethylene-butadiene-styrene Polymers 0.000 description 2
- 244000043261 Hevea brasiliensis Species 0.000 description 1
- 229920000459 Nitrile rubber Polymers 0.000 description 1
- BQCADISMDOOEFD-UHFFFAOYSA-N Silver Chemical compound [Ag] BQCADISMDOOEFD-UHFFFAOYSA-N 0.000 description 1
- 238000010317 ablation therapy Methods 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 229920001400 block copolymer Polymers 0.000 description 1
- MTAZNLWOLGHBHU-UHFFFAOYSA-N butadiene-styrene rubber Chemical compound C=CC=C.C=CC1=CC=CC=C1 MTAZNLWOLGHBHU-UHFFFAOYSA-N 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 229920001973 fluoroelastomer Polymers 0.000 description 1
- 210000001035 gastrointestinal tract Anatomy 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 239000010931 gold Substances 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- 150000002576 ketones Chemical class 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000002844 melting Methods 0.000 description 1
- 230000008018 melting Effects 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 229920003052 natural elastomer Polymers 0.000 description 1
- 229920001194 natural rubber Polymers 0.000 description 1
- 229920001643 poly(ether ketone) Polymers 0.000 description 1
- 229920002635 polyurethane Polymers 0.000 description 1
- 239000004814 polyurethane Substances 0.000 description 1
- 229920005749 polyurethane resin Polymers 0.000 description 1
- 239000004800 polyvinyl chloride Substances 0.000 description 1
- 229920000915 polyvinyl chloride Polymers 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 229920002379 silicone rubber Polymers 0.000 description 1
- 239000004945 silicone rubber Substances 0.000 description 1
- 238000002560 therapeutic procedure Methods 0.000 description 1
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 1
- 210000000626 ureter Anatomy 0.000 description 1
- 150000003673 urethanes Chemical class 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images





Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0133—Tip steering devices
- A61M25/0136—Handles therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
- A61B18/14—Probes or electrodes therefor
- A61B18/1492—Probes or electrodes therefor having a flexible, catheter-like structure, e.g. for heart ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0133—Tip steering devices
- A61M25/0147—Tip steering devices with movable mechanical means, e.g. pull wires
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/09—Guide wires
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00345—Vascular system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00345—Vascular system
- A61B2018/00351—Heart
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00577—Ablation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00839—Bioelectrical parameters, e.g. ECG, EEG
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/0091—Handpieces of the surgical instrument or device
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3966—Radiopaque markers visible in an X-ray image
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/02—General characteristics of the apparatus characterised by a particular materials
- A61M2205/0233—Conductive materials, e.g. antistatic coatings for spark prevention
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- General Health & Medical Sciences (AREA)
- Anesthesiology (AREA)
- Pulmonology (AREA)
- Biophysics (AREA)
- Hematology (AREA)
- Surgery (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Plasma & Fusion (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Otolaryngology (AREA)
- Cardiology (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Media Introduction/Drainage Providing Device (AREA)
Description
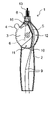
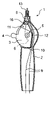
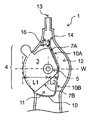
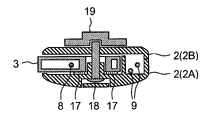
2:ハンドル本体、2A:第1ハンドル部材、2B:第2ハンドル部材
3:回転部材
4:操作部
5:回転軸
6:ワイヤ係止部
7A:第1直線部、7B:第2直線部
8:ワイヤ
9:導線
10:仕切り部、10A:第1仕切り直線部、10B:第2仕切り直線部
11:第1空間
12:第2空間
13:接続口
14:分岐部
15:ワイヤ挿入空間
16:ワイヤ案内部材
17:弾性部材
18:ボルト
19:把手(ナット)
21:カテーテル
22:カテーテルチューブ
23,23A,23B:電極
Claims (12)
- ワイヤと導線が内部に配置されたカテーテルチューブを接続して操作するためのカテーテル用ハンドルであって、
前記ハンドルは、前記カテーテルチューブの近位側が接続されるハンドル本体と、前記ハンドル本体に対して回転自在に設けられ、前記ワイヤの近位側が固定される回転部材とを有し、
前記回転部材は、前記ハンドルの遠近方向と幅方向に対して垂直な回転軸を有し、前記ハンドル本体の外側から回転操作可能な操作部を備え、
前記ハンドル本体内には、前記回転部材の回転軸方向からの平面視で、前記回転部材が回転移動可能な第1空間と導線を配置するための第2空間が設けられ、前記第2空間が、前記第1空間よりも遠位側から前記第1空間よりも近位側にかけて設けられており、
前記回転部材の回転軸を挟んで、前記操作部は、前記ハンドルの前記幅方向の一方側に設けられ、前記第2空間は、前記ハンドルの前記幅方向の他方側に設けられており、
前記回転部材は、前記第1空間に配置され前記回転軸を中心に回転移動したいずれかの状態で、前記回転軸中心を通り前記幅方向に延びる仮想直線上において、前記回転軸中心から前記幅方向の前記一方側の前記回転部材の外縁までの長さL1が、前記回転軸中心から前記幅方向の前記他方側の前記回転部材の外縁までの長さL2よりも長いことを特徴とするカテーテル用ハンドル。 - 前記ハンドル本体は、遠位側に、前記カテーテルチューブを接続する接続口を有し、
前記回転軸中心は、前記幅方向において、前記接続口と重なる位置にあるか、前記接続口よりも前記幅方向の前記他方側に位置する請求項1に記載のカテーテル用ハンドル。 - 前記回転部材は、前記ワイヤの近位側を固定するワイヤ係止部を備えており、
前記ワイヤ係止部の前記回転軸中心からの長さが、前記操作部の前記回転軸中心からの長さよりも短い請求項1または2に記載のカテーテル用ハンドル。 - 前記ワイヤ係止部は、前記回転部材の前記回転軸中心よりも近位側に位置する請求項3に記載のカテーテル用ハンドル。
- 前記回転部材は、前記回転軸中心から前記回転部材の外縁までの最長長さLに対して、前記回転軸中心から前記回転部材の外縁までの長さが0.5L以下となる角度領域を有し、前記角度領域が前記回転部材の前記回転軸中心の120°以上の範囲である請求項1~4のいずれか一項に記載のカテーテル用ハンドル。
- 前記第1空間と前記第2空間の境界に仕切り部が設けられている請求項1~5のいずれか一項に記載のカテーテル用ハンドル。
- 前記回転部材は、前記回転軸を中心とする回転移動によって、前記回転部材の外縁の一部が前記仕切り部の一部に接する請求項6に記載のカテーテル用ハンドル。
- 前記仕切り部は、第1仕切り直線部と第2仕切り直線部とを有し、
前記回転部材の外縁は、第1直線部と第2直線部とを有し、
前記回転部材の前記回転軸を中心とする回転移動によって、前記第1直線部が前記第1仕切り直線部に近づき、前記第2直線部が前記第2仕切り直線部から離れる、または、前記第2直線部が前記第2仕切り直線部に近づき、前記第1直線部が前記第1仕切り直線部から離れる請求項6または7に記載のカテーテル用ハンドル。 - 前記回転部材と前記ハンドル本体との間には弾性部材が設けられ、
前記回転部材は、前記弾性部材を介して前記ハンドル本体に対して回転軸方向に押圧可能である請求項1~8のいずれか一項に記載のカテーテル用ハンドル。 - 前記ハンドル本体は、前記回転部材より遠位側に、前記ハンドル本体の遠位側から挿入された前記ワイヤと前記導線を分岐するための分岐部を有し、
前記分岐部において、前記ハンドル本体内に、前記第1空間に連通したワイヤ挿入空間が設けられている請求項1~9のいずれか一項に記載のカテーテル用ハンドル。 - 前記ワイヤ挿入空間には、前記ワイヤを通すための開口を有するワイヤ案内部材が設けられ、
前記ワイヤ案内部材の開口は、遠位側の開口径が近位側の開口径よりも大きい請求項10に記載のカテーテル用ハンドル。 - 請求項1~11のいずれか一項に記載のカテーテル用ハンドルと、
前記ハンドル本体の遠位側に接続されたカテーテルチューブと、
遠位側が前記カテーテルチューブに固定され、近位側が前記回転部材に固定されたワイヤと、
遠位側が前記カテーテルチューブに固定され、近位側が前記第2空間を通って前記回転部材の近位側に延在する導線とを有することを特徴とするカテーテル。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018015107 | 2018-01-31 | ||
| JP2018015107 | 2018-01-31 | ||
| PCT/JP2018/038241 WO2019150664A1 (ja) | 2018-01-31 | 2018-10-15 | カテーテル用ハンドルおよびそれを備えたカテーテル |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2019150664A1 JPWO2019150664A1 (ja) | 2021-01-14 |
| JP7114635B2 true JP7114635B2 (ja) | 2022-08-08 |
Family
ID=67478105
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019568858A Active JP7114635B2 (ja) | 2018-01-31 | 2018-10-15 | カテーテル用ハンドルおよびそれを備えたカテーテル |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US12005200B2 (ja) |
| JP (1) | JP7114635B2 (ja) |
| CN (1) | CN111655322B (ja) |
| WO (1) | WO2019150664A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USD994880S1 (en) * | 2021-11-02 | 2023-08-08 | Abiomed, Inc. | Medical device housing |
| CN116636921A (zh) * | 2022-02-24 | 2023-08-25 | 奥林巴斯医疗株式会社 | 处置器具 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5199950A (en) | 1990-12-07 | 1993-04-06 | Willy Rusch Ag | Medical instrument |
| US20080009791A1 (en) | 2005-07-11 | 2008-01-10 | Cohen Todd J | Remotely controlled catheter insertion system |
| WO2014156284A1 (ja) | 2013-03-29 | 2014-10-02 | 日本ライフライン株式会社 | 医療機器 |
| US20160325076A1 (en) | 2015-05-07 | 2016-11-10 | St. Jude Medical, Cardiology Division, Inc. | Medical device including a variable torque assembly for device deflection |
| US20170291008A1 (en) | 2016-04-08 | 2017-10-12 | St. Jude Medical, Cardiology Division, Inc. | Mapping variable loop catheter handle |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1824339B (zh) * | 2005-02-21 | 2011-05-11 | 住友电木株式会社 | 医疗用器具 |
| US8777929B2 (en) * | 2005-06-28 | 2014-07-15 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Auto lock for catheter handle |
| CN101291695A (zh) * | 2005-10-17 | 2008-10-22 | 株式会社钟化 | 医疗用导管及其制造方法 |
| US8556850B2 (en) * | 2008-12-31 | 2013-10-15 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Shaft and handle for a catheter with independently-deflectable segments |
| US20120130218A1 (en) * | 2010-11-23 | 2012-05-24 | Kauphusman James V | Medical devices having an electroanatomical system imaging element mounted thereon |
| JP5614848B2 (ja) * | 2011-07-12 | 2014-10-29 | 日本ライフライン株式会社 | カテーテル用ハンドル |
| JP5535260B2 (ja) * | 2012-03-19 | 2014-07-02 | 日本ライフライン株式会社 | カテーテル用ハンドル |
| WO2013150871A1 (ja) * | 2012-04-06 | 2013-10-10 | オリンパスメディカルシステムズ株式会社 | 挿入機器 |
| US9174024B1 (en) * | 2013-03-15 | 2015-11-03 | St. Jude Medical Luxembourg Holdings S.À.R.L. | Steering control mechanisms for catheters |
| JP6113682B2 (ja) * | 2014-03-18 | 2017-04-12 | 日本ライフライン株式会社 | 医療機器用ハンドルおよび医療機器 |
| CN107185062A (zh) * | 2017-07-14 | 2017-09-22 | 仝兆锋 | 一种专用于神经外科导管装置 |
-
2018
- 2018-10-15 WO PCT/JP2018/038241 patent/WO2019150664A1/ja not_active Ceased
- 2018-10-15 CN CN201880088103.4A patent/CN111655322B/zh active Active
- 2018-10-15 JP JP2019568858A patent/JP7114635B2/ja active Active
- 2018-10-15 US US16/965,562 patent/US12005200B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5199950A (en) | 1990-12-07 | 1993-04-06 | Willy Rusch Ag | Medical instrument |
| US20080009791A1 (en) | 2005-07-11 | 2008-01-10 | Cohen Todd J | Remotely controlled catheter insertion system |
| WO2014156284A1 (ja) | 2013-03-29 | 2014-10-02 | 日本ライフライン株式会社 | 医療機器 |
| US20160325076A1 (en) | 2015-05-07 | 2016-11-10 | St. Jude Medical, Cardiology Division, Inc. | Medical device including a variable torque assembly for device deflection |
| US20170291008A1 (en) | 2016-04-08 | 2017-10-12 | St. Jude Medical, Cardiology Division, Inc. | Mapping variable loop catheter handle |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111655322A (zh) | 2020-09-11 |
| US12005200B2 (en) | 2024-06-11 |
| WO2019150664A1 (ja) | 2019-08-08 |
| CN111655322B (zh) | 2022-05-03 |
| US20210046285A1 (en) | 2021-02-18 |
| JPWO2019150664A1 (ja) | 2021-01-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12465200B2 (en) | Steerable micro-endoscope having an electro-surgery tool | |
| JP6157792B2 (ja) | 医療用マニピュレータ | |
| US5571085A (en) | Steerable open lumen catheter | |
| CN102892453B (zh) | 磁性导引导管 | |
| EP1364677A2 (en) | Electrode array catheter | |
| JP2009522080A (ja) | 脈管ガイドワイヤコントロール装置 | |
| JP2020505084A (ja) | シースの可視化 | |
| US9861432B2 (en) | Rotation mechanism for bipolar and monopolar devices | |
| CN113660911B (zh) | 医疗器械 | |
| US10905446B2 (en) | Caculus removing device | |
| CN111683716A (zh) | 导管及其制造方法 | |
| US10064679B2 (en) | Endoscopic shank instrument | |
| JP7114635B2 (ja) | カテーテル用ハンドルおよびそれを備えたカテーテル | |
| JP5697273B2 (ja) | 先端偏向操作可能カテーテル | |
| JP2015173945A (ja) | 医療機器用ハンドルおよび医療機器 | |
| CN104507536B (zh) | 组合的短程治疗和电化学治疗导管 | |
| KR100896750B1 (ko) | 생체 삽입용 의료기구 | |
| CN117561035A (zh) | 医疗系统、装置以及相关的方法 | |
| CN114502074B (zh) | 导管及其制造方法 | |
| JP7659558B2 (ja) | 電極カテーテル | |
| WO2022127905A1 (zh) | 可调弯穿刺装置及穿刺系统 | |
| CN110536652B (zh) | 内窥镜用高频处置仪 | |
| JP6710066B2 (ja) | カテーテル用ハンドルおよびそれを備えたカテーテル | |
| JP7669366B2 (ja) | 電極カテーテル | |
| JP7701213B2 (ja) | 電極カテーテル |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210906 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220719 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220727 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7114635 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |