JP7088092B2 - バランス訓練装置およびバランス訓練装置の制御プログラム - Google Patents
バランス訓練装置およびバランス訓練装置の制御プログラム Download PDFInfo
- Publication number
- JP7088092B2 JP7088092B2 JP2019047890A JP2019047890A JP7088092B2 JP 7088092 B2 JP7088092 B2 JP 7088092B2 JP 2019047890 A JP2019047890 A JP 2019047890A JP 2019047890 A JP2019047890 A JP 2019047890A JP 7088092 B2 JP7088092 B2 JP 7088092B2
- Authority
- JP
- Japan
- Prior art keywords
- trainee
- difficulty level
- training
- difficulty
- state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus ; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus ; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/001—Apparatus for applying movements to the whole body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus ; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/005—Moveable platform, e.g. vibrating or oscillating platform for standing, sitting, laying, leaning
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0087—Electric or electronic controls for exercising apparatus of groups A63B21/00 - A63B23/00, e.g. controlling load
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B26/00—Exercising apparatus not covered by groups A63B1/00 - A63B25/00
- A63B26/003—Exercising apparatus not covered by groups A63B1/00 - A63B25/00 for improving balance or equilibrium
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1635—Hand or arm, e.g. handle
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1657—Movement of interface, i.e. force application means
- A61H2201/1664—Movement of interface, i.e. force application means linear
- A61H2201/1669—Movement of interface, i.e. force application means linear moving along the body in a reciprocating manner
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2203/00—Additional characteristics concerning the patient
- A61H2203/04—Position of the patient
- A61H2203/0406—Standing on the feet
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2230/00—Measuring physical parameters of the user
- A61H2230/62—Posture
- A61H2230/625—Posture used as a control parameter for the apparatus
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0062—Monitoring athletic performances, e.g. for determining the work of a user on an exercise apparatus, the completed jogging or cycling distance
- A63B2024/0068—Comparison to target or threshold, previous performance or not real time comparison to other individuals
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0087—Electric or electronic controls for exercising apparatus of groups A63B21/00 - A63B23/00, e.g. controlling load
- A63B2024/0096—Electric or electronic controls for exercising apparatus of groups A63B21/00 - A63B23/00, e.g. controlling load using performance related parameters for controlling electronic or video games or avatars
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B71/00—Games or sports accessories not covered in groups A63B1/00 - A63B69/00
- A63B71/02—Games or sports accessories not covered in groups A63B1/00 - A63B69/00 for large-room or outdoor sporting games
- A63B71/023—Supports, e.g. poles
- A63B2071/025—Supports, e.g. poles on rollers or wheels
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B71/00—Games or sports accessories not covered in groups A63B1/00 - A63B69/00
- A63B71/06—Indicating or scoring devices for games or players, or for other sports activities
- A63B2071/0675—Input for modifying training controls during workout
- A63B2071/0683—Input by handheld remote control
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B71/00—Games or sports accessories not covered in groups A63B1/00 - A63B69/00
- A63B71/06—Indicating or scoring devices for games or players, or for other sports activities
- A63B2071/0694—Visual indication, e.g. Indicia
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2208/00—Characteristics or parameters related to the user or player
- A63B2208/02—Characteristics or parameters related to the user or player posture
- A63B2208/0204—Standing on the feet
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/05—Image processing for measuring physical parameters
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/20—Distances or displacements
- A63B2220/24—Angular displacement
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/50—Force related parameters
- A63B2220/51—Force
- A63B2220/52—Weight, e.g. weight distribution
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/50—Force related parameters
- A63B2220/56—Pressure
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/80—Special sensors, transducers or devices therefor
- A63B2220/807—Photo cameras
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/80—Special sensors, transducers or devices therefor
- A63B2220/83—Special sensors, transducers or devices therefor characterised by the position of the sensor
- A63B2220/833—Sensors arranged on the exercise apparatus or sports implement
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/80—Special sensors, transducers or devices therefor
- A63B2220/83—Special sensors, transducers or devices therefor characterised by the position of the sensor
- A63B2220/836—Sensors arranged on the body of the user
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2225/00—Miscellaneous features of sport apparatus, devices or equipment
- A63B2225/50—Wireless data transmission, e.g. by radio transmitters or telemetry
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2230/00—Measuring physiological parameters of the user
- A63B2230/04—Measuring physiological parameters of the user heartbeat characteristics, e.g. ECG, blood pressure modulations
- A63B2230/06—Measuring physiological parameters of the user heartbeat characteristics, e.g. ECG, blood pressure modulations heartbeat rate only
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2230/00—Measuring physiological parameters of the user
- A63B2230/40—Measuring physiological parameters of the user respiratory characteristics
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B71/00—Games or sports accessories not covered in groups A63B1/00 - A63B69/00
- A63B71/0054—Features for injury prevention on an apparatus, e.g. shock absorbers
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B71/00—Games or sports accessories not covered in groups A63B1/00 - A63B69/00
- A63B71/06—Indicating or scoring devices for games or players, or for other sports activities
- A63B71/0619—Displays, user interfaces and indicating devices, specially adapted for sport equipment, e.g. display mounted on treadmills
- A63B71/0622—Visual, audio or audio-visual systems for entertaining, instructing or motivating the user
Landscapes
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Physical Education & Sports Medicine (AREA)
- Epidemiology (AREA)
- Pain & Pain Management (AREA)
- Rehabilitation Therapy (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Rehabilitation Tools (AREA)
Description
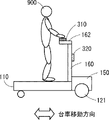
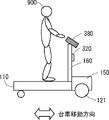
図1は、実施の形態1にかかるバランス訓練装置の一例としての訓練装置100の概略斜視図である。訓練装置100は、片麻痺などの障害を持つ障害者が歩行に必要な重心移動を習得するためや、足関節に障害を抱える患者が足関節機能を回復させるための装置である。例えば、足関節機能を回復させたい訓練者900がバランスを取りつつ訓練装置100に搭乗を続けようとすると、訓練装置100は、訓練者900の足関節にリハビリ効果を期待できる程度の負荷を与えることができる。
v=S×F(t,A,T1,T2) ・・・ (1)
実施の形態2では、訓練の難易度を変化させる訓練者900の姿勢の乱れの判定方法の別の方法を説明する。そこで、図7に実施の形態2にかかる訓練装置における訓練の難易度の変化を説明するタイミングチャートを示す。
実施の形態3では、訓練の難易度を下げるだけではなく、上げるための処理を加えた動作方法について説明する。そこで、図8に実施の形態3にかかる訓練装置100の動作を説明するフローチャートを示す。
実施の形態4では、訓練の難易度を変化させる訓練者900の姿勢の乱れの判定方法の別の方法を説明する。そこで、図10に実施の形態4にかかる訓練装置における訓練の難易度の変化を説明するタイミングチャートを示す。
その他の実施の形態では、姿勢検知センサ250の配置及び姿勢検知センサ250として利用可能なセンサの別の形態について説明する。以下の説明では、各形態について、実施の形態5~8として説明する。
110 移動台車
121 駆動輪
122 キャスタ
130 搭乗プレート
140 荷重センサ
150 コントロールボックス
160 フレーム
161 開扉
162 手すり
170 表示パネル
200 演算処理部
201 荷重算出部
202 範囲設定部
203 移動制御部
204 難易度設定部
210 駆動輪ユニット
220 操作受付部
230 表示制御部
240 メモリ
241 課題ゲーム
242 揺動パターン
250 姿勢検知センサ
310 手すりスイッチ
320 訓練スイッチ
330 手すりスイッチ
340 手すり
350 圧力センサ
360 生体センサ
370 受信部
380 カメラ
900 訓練者
Claims (5)
- 駆動部を駆動することにより移動面上を移動可能な移動台車と、
前記駆動部を駆動して、予め設定された揺動パターンに従って前記移動台車を移動させる移動制御部と、
前記移動台車に立つ訓練者の状態の乱れが所定の範囲から外れたことを検出する姿勢検知センサと、
前記姿勢検知センサから通知される前記訓練者の状態の検出結果に基づき、前記揺動パターンを変更して移動台車を移動させる訓練の難易度を変更することを前記移動制御部に指示する難易度設定部と、を有し、
前記難易度設定部は、
前記姿勢検知センサから通知される前記訓練者の状態の崩れが前記所定の範囲外となった状態の継続時間が第1の規定値を超えた場合に前記難易度を低下させ、
前記姿勢検知センサから通知される前記訓練者の状態の崩れが前記所定の範囲外となった状態の継続時間が前記第1の規定値よりも大きな第3の規定値を超えた場合に前記移動制御部に前記訓練を中止することを指示するバランス訓練装置。 - 前記姿勢検知センサは、前記移動台車に取り付けられる手すりに設けられる手すりスイッチ、前記手すりと前記手すりを支持する支柱との間に設けられる圧力センサ、前記訓練者の身体の一部に取り付けられ前記訓練者の生態情報を検知する生体センサ、前記移動台車に取り付けられ前記訓練者の姿勢を撮影するカメラ、の少なくとも1つを含む請求項1に記載のバランス訓練装置。
- 前記難易度設定部は、前記姿勢検知センサから通知される前記訓練者の状態の崩れが前記所定の範囲外となった状態の時間の積算値が、予め決まった長さの判定閾値期間内の所定の割合を超えた場合に前記難易度を低下させる請求項1又は2に記載のバランス訓練装置。
- 前記難易度設定部は、前記姿勢検知センサから通知される前記訓練者の状態の崩れが前記所定の範囲内である状態の継続時間が、第2の規定値に基づき設定される難易度上昇判定期間以上となった場合に前記難易度を上昇させる請求項1乃至3のいずれか1項記載のバランス訓練装置。
- 移動面上を移動する移動台車に訓練者が立ってバランス訓練を行うバランス訓練装置の制御プログラムであって、
前記移動台車を移動させる駆動部を駆動して、予め設定された揺動パターンに従って前記移動台車を移動させる移動制御ステップと、
前記訓練者の状態の乱れが所定の範囲から外れたことを検出する姿勢検知ステップと、
前記姿勢検知ステップにおいて通知される前記訓練者の状態の検出結果に基づき、前記揺動パターンを変更して前記移動台車を移動させる訓練の難易度を変更する難易度設定ステップと、をコンピュータに実行させ、
前記難易度設定ステップにおいて、
前記姿勢検知ステップにおいて通知される前記訓練者の状態の崩れが前記所定の範囲外となった状態の継続時間が第1の規定値を超えた場合に前記難易度を低下させ、
前記姿勢検知ステップにおいて通知される前記訓練者の状態の崩れが前記所定の範囲外となった状態の継続時間が前記第1の規定値よりも大きな第3の規定値を超えた場合に前記移動制御ステップを中止することを指示するバランス訓練装置の制御プログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019047890A JP7088092B2 (ja) | 2019-03-15 | 2019-03-15 | バランス訓練装置およびバランス訓練装置の制御プログラム |
| US16/806,474 US11376471B2 (en) | 2019-03-15 | 2020-03-02 | Balance training apparatus and control program of balance training apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019047890A JP7088092B2 (ja) | 2019-03-15 | 2019-03-15 | バランス訓練装置およびバランス訓練装置の制御プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020146327A JP2020146327A (ja) | 2020-09-17 |
| JP7088092B2 true JP7088092B2 (ja) | 2022-06-21 |
Family
ID=72423872
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019047890A Active JP7088092B2 (ja) | 2019-03-15 | 2019-03-15 | バランス訓練装置およびバランス訓練装置の制御プログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US11376471B2 (ja) |
| JP (1) | JP7088092B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7243651B2 (ja) * | 2020-02-12 | 2023-03-22 | トヨタ自動車株式会社 | バランス訓練システム、その制御方法、及び、制御プログラム |
| US11771614B2 (en) * | 2020-03-12 | 2023-10-03 | Doris Keene | Walking assistance assembly |
| KR102429466B1 (ko) * | 2020-10-29 | 2022-08-04 | 주식회사 블루웨일 | 다기능 3d 바디스캔장치 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018121911A (ja) | 2017-02-01 | 2018-08-09 | トヨタ自動車株式会社 | 訓練システム |
| JP2019024579A (ja) | 2017-07-25 | 2019-02-21 | パナソニックIpマネジメント株式会社 | リハビリテーション支援システム、リハビリテーション支援方法及びプログラム |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20090240172A1 (en) * | 2003-11-14 | 2009-09-24 | Treno Corporation | Vestibular rehabilitation unit |
| US8622747B2 (en) * | 2005-04-28 | 2014-01-07 | Simbex Llc | Training system and method using a dynamic perturbation platform |
| US20120094814A1 (en) * | 2007-09-01 | 2012-04-19 | Balancesense Llc | Method and apparatus for vibrotactile motional training employing cognitive spatial activity |
| US9149222B1 (en) * | 2008-08-29 | 2015-10-06 | Engineering Acoustics, Inc | Enhanced system and method for assessment of disequilibrium, balance and motion disorders |
| US9526946B1 (en) * | 2008-08-29 | 2016-12-27 | Gary Zets | Enhanced system and method for vibrotactile guided therapy |
| US20150328497A1 (en) * | 2012-11-28 | 2015-11-19 | Northeastern University | Virtually-interfaced robotic ankle & balance trainer |
| JP6260811B2 (ja) | 2013-11-22 | 2018-01-17 | 株式会社テック技販 | リハビリ支援装置 |
| WO2015120186A1 (en) * | 2014-02-05 | 2015-08-13 | President And Fellows Of Harvard College | Systems, methods, and devices for assisting walking for developmentally-delayed toddlers |
| US10398938B2 (en) * | 2014-05-30 | 2019-09-03 | Isotechnology Pty Ltd | System and method for facilitating patient rehabilitation |
| US20160228746A1 (en) * | 2015-02-09 | 2016-08-11 | Udai Jayakumar | Gait training apparatus and methodfor preventing or limiting injuries |
| TWI634885B (zh) * | 2016-01-06 | 2018-09-11 | 國立交通大學 | 用於控制行走輔具的方法 |
| US10117602B1 (en) * | 2016-04-09 | 2018-11-06 | Bertec Corporation | Balance and/or gait perturbation system and a method for testing and/or training a subject using the same |
| US20180289579A1 (en) * | 2017-04-11 | 2018-10-11 | The Trustees Of Columbia University In The City Of New York | Powered Walking Assistant and Associated Systems and Methods |
-
2019
- 2019-03-15 JP JP2019047890A patent/JP7088092B2/ja active Active
-
2020
- 2020-03-02 US US16/806,474 patent/US11376471B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018121911A (ja) | 2017-02-01 | 2018-08-09 | トヨタ自動車株式会社 | 訓練システム |
| JP2019024579A (ja) | 2017-07-25 | 2019-02-21 | パナソニックIpマネジメント株式会社 | リハビリテーション支援システム、リハビリテーション支援方法及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020146327A (ja) | 2020-09-17 |
| US11376471B2 (en) | 2022-07-05 |
| US20200289893A1 (en) | 2020-09-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7088092B2 (ja) | バランス訓練装置およびバランス訓練装置の制御プログラム | |
| JP6384436B2 (ja) | バランス訓練装置及びその制御方法 | |
| JP7052762B2 (ja) | バランス訓練装置およびバランス訓練装置の制御プログラム | |
| EP3299002B1 (en) | Walking assistance device | |
| JP2011031669A (ja) | 移動体制御システム、その制御方法及び制御プログラム | |
| JP2014182318A (ja) | バランス訓練システム及びその制御方法 | |
| JP7081540B2 (ja) | バランス訓練装置、制御方法およびプログラム | |
| JP2003290302A (ja) | 歩行補助装置およびその制御プログラム | |
| JP7052764B2 (ja) | バランス訓練装置およびバランス訓練装置の制御プログラム | |
| US11400346B2 (en) | Balance training apparatus and control program for balance training apparatus | |
| JP6891803B2 (ja) | 歩行補助装置 | |
| US11395941B2 (en) | Balance training system and control method for balance training system | |
| JPH1099388A (ja) | 歩行訓練機 | |
| JP7070480B2 (ja) | バランス訓練装置 | |
| JP7052763B2 (ja) | バランス訓練装置およびバランス訓練装置の制御プログラム | |
| JP2020146326A (ja) | バランス訓練装置 | |
| JP6780547B2 (ja) | バランス訓練装置 | |
| JP2020146329A (ja) | バランス訓練装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210624 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220301 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220414 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220510 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220523 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7088092 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |