JP7026645B2 - 凝血塊の排出及び視覚化装置及び使用方法 - Google Patents
凝血塊の排出及び視覚化装置及び使用方法 Download PDFInfo
- Publication number
- JP7026645B2 JP7026645B2 JP2018568173A JP2018568173A JP7026645B2 JP 7026645 B2 JP7026645 B2 JP 7026645B2 JP 2018568173 A JP2018568173 A JP 2018568173A JP 2018568173 A JP2018568173 A JP 2018568173A JP 7026645 B2 JP7026645 B2 JP 7026645B2
- Authority
- JP
- Japan
- Prior art keywords
- clot
- drainer
- distal end
- visualization
- elongated body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00174—Optical arrangements characterised by the viewing angles
- A61B1/00181—Optical arrangements characterised by the viewing angles for multiple fixed viewing angles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
- A61B1/000095—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope for image enhancement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/0002—Operational features of endoscopes provided with data storages
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00064—Constructional details of the endoscope body
- A61B1/00071—Insertion part of the endoscope body
- A61B1/0008—Insertion part of the endoscope body characterised by distal tip features
- A61B1/00087—Tools
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00154—Holding or positioning arrangements using guiding arrangements for insertion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00174—Optical arrangements characterised by the viewing angles
- A61B1/00179—Optical arrangements characterised by the viewing angles for off-axis viewing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/012—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor
- A61B1/015—Control of fluid supply or evacuation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
- A61B1/07—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements using light-conductive means, e.g. optical fibres
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/12—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with cooling or rinsing arrangements
- A61B1/126—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with cooling or rinsing arrangements provided with means for cleaning in-use
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/313—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for introducing through surgical openings, e.g. laparoscopes
- A61B1/317—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for introducing through surgical openings, e.g. laparoscopes for bones or joints, e.g. osteoscopes, arthroscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/22—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/22—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for
- A61B17/22004—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for using mechanical vibrations, e.g. ultrasonic shock waves
- A61B17/22012—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for using mechanical vibrations, e.g. ultrasonic shock waves in direct contact with, or very close to, the obstruction or concrement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3478—Endoscopic needles, e.g. for infusion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3494—Trocars; Puncturing needles with safety means for protection against accidental cutting or pricking, e.g. limiting insertion depth, pressure sensors
- A61B17/3496—Protecting sleeves or inner probes; Retractable tips
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0891—Detecting organic movements or changes, e.g. tumours, cysts, swellings for diagnosis of blood vessels
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/12—Diagnosis using ultrasonic, sonic or infrasonic waves in body cavities or body tracts, e.g. by using catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/10—Balloon catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/0046—Surgical instruments, devices or methods, e.g. tourniquets with a releasable handle; with handle and operating part separable
- A61B2017/00473—Distal part, e.g. tip or head
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00867—Material properties shape memory effect
- A61B2017/00871—Material properties shape memory effect polymeric
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00902—Material properties transparent or translucent
- A61B2017/00907—Material properties transparent or translucent for light
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/22—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for
- A61B2017/22051—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for with an inflatable part, e.g. balloon, for positioning, blocking, or immobilisation
- A61B2017/22062—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for with an inflatable part, e.g. balloon, for positioning, blocking, or immobilisation to be filled with liquid
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/22—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for
- A61B2017/22051—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for with an inflatable part, e.g. balloon, for positioning, blocking, or immobilisation
- A61B2017/22065—Functions of balloons
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/22—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for
- A61B2017/22072—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for with an instrument channel, e.g. for replacing one instrument by the other
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/22—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for
- A61B2017/22079—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for with suction of debris
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B2017/320044—Blunt dissectors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B2017/320044—Blunt dissectors
- A61B2017/320048—Balloon dissectors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3417—Details of tips or shafts, e.g. grooves, expandable, bendable; Multiple coaxial sliding cannulas, e.g. for dilating
- A61B17/3421—Cannulas
- A61B2017/3445—Cannulas used as instrument channel for multiple instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3417—Details of tips or shafts, e.g. grooves, expandable, bendable; Multiple coaxial sliding cannulas, e.g. for dilating
- A61B2017/3454—Details of tips
- A61B2017/3456—Details of tips blunt
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2217/00—General characteristics of surgical instruments
- A61B2217/002—Auxiliary appliance
- A61B2217/005—Auxiliary appliance with suction drainage system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2217/00—General characteristics of surgical instruments
- A61B2217/002—Auxiliary appliance
- A61B2217/007—Auxiliary appliance with irrigation system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/10—Balloon catheters
- A61M2025/1043—Balloon catheters with special features or adapted for special applications
- A61M2025/1084—Balloon catheters with special features or adapted for special applications having features for increasing the shape stability, the reproducibility or for limiting expansion, e.g. containments, wrapped around fibres, yarns or strands
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2210/00—Anatomical parts of the body
- A61M2210/06—Head
- A61M2210/0693—Brain, cerebrum
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2230/00—Measuring parameters of the user
- A61M2230/20—Blood composition characteristics
- A61M2230/201—Glucose concentration
Description
本出願は、2016年3月17日に出願された米国仮特許出願第62/309,918号及び2017年3月10日に出願された米国仮特許出願第62/470,095号に基づく優先権を主張するものであり、これらの開示内容は、その全てを本明細書に組み込むものとする。これらに対して優先権を持つかこれらを優先権の基礎とする関連するすべての出願は、参照として、その全てを本明細書に組み込むものとする。
ハンドピースと、
ハンドルに固定された近位端と、遠位端との間の長手方向軸に沿って延びる細長い本体と、
組織及び/又は凝血塊を視覚化するように構成された細長い本体に沿って、又はその中に配置された視覚化要素と、
細長い管状体の少なくとも一部分に沿って長さ方向に伸びる内腔であって、内腔を通して凝固物を除去するために吸引及び/又は灌注を行うように構成された内腔と、
を具備する。
統合された凝血塊排出装置を患者の脳内の凝血塊に隣接する位置に送り込むステップであって、前記凝血塊排出装置は、近位端と遠位端との間で長手方向軸に沿って伸びる細長い本体を具備し、前記遠位端は、前記凝血塊に隣接して配置されることを特徴とし、
凝血塊排出装置に組み込まれ、細長い本体に沿って、又は細長い本体内に配置された視覚化要素を利用して、組織及び/又は凝血塊を視覚化するステップと、
前記凝血塊排出装置の遠位端又はその近くの開口を通して、吸引及び/又は灌注を利用して凝血塊を除去するステップと、
を具備することができる。
。
(光学イントロデューサ及び別個の凝血塊排出装置を利用するシステム及び方法)
(取外し可能な非外傷性先端を有する凝血塊排出装置を利用するシステム及び方法)
(統合されたイントロデューサ/凝血塊排出装置を使用するシステム及び方法)
(膨張可能なバルーンを有する統合されたイントロデューサ/凝血塊排出装置を使用するシステム及び方法)
(内視鏡を、イントロデューサを収容するのに適合させるためのシステム及び方法)
(凝血塊排出装置の別の例)
Claims (10)
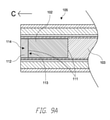
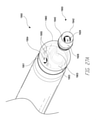
- 近位端及び遠位端を有する細長い本体であって、前記細長い本体は、1つ以上の内腔を具備し、前記1つ以上の内腔は、前記細長い本体の長さ方向の少なくとも一部に沿って延びる排出内腔を具備し、前記細長い本体は、前記細長い本体の遠位端又は遠位端の近くで、前記排出内腔と流体連通する遠位開口を具備する、細長い本体と、
患者の内部で捉えた画像を送信するために前記細長い本体の遠位端又はその近傍に配置された視覚化要素と、
前記排出内腔内に取り外し可能に挿入され、前記遠位開口を閉鎖するように構成された栓子と、
を具備し、
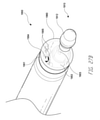
前記細長い本体の遠位端の少なくとも一部は、前記細長い本体の遠位端を通じて前記視覚化要素により視覚化が可能となるように、少なくとも部分的に透明であることを特徴とする排出装置。 - 前記栓子が前記排出内腔内に取り外し可能に挿入され、前記遠位開口を閉鎖したとき、前記排出装置は、非外傷性先端を形成することを特徴とする、請求項1に記載の排出装置。
- 前記排出内腔は、患者の内部領域で吸引を行うように構成されていることを特徴とする、請求項1又は請求項2に記載の排出装置。
- 前記細長い本体が、患者の内部領域に灌注用流体を送り込むように構成された灌注内腔を具備することを特徴とする、請求項1乃至請求項3のいずれか1項に記載の排出装置。
- 前記細長い本体は、前記視覚化要素に灌注流体を送り込むように構成された灌注内腔を具備することを特徴とする、請求項1乃至請求項4のいずれか1項に記載の排出装置。
- 前記細長い本体は、患者の内部領域に光を照射するように構成された照明要素をさらに具備することを特徴とする、請求項1乃至請求項5のいずれか1項に記載の排出装置。
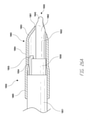
- 前記細長い本体は、内腔と遠位端に配置された先端とを有する実質的に管状の本体を備え、前記先端は、前記管状の本体の周囲の一部から、実質的に前記管状の本体の長手方向軸に沿って整列して前記管状の本体の遠位端の遠位に配置されている点まで伸びるように構成されていることを特徴とする、請求項1乃至請求項6のいずれか1項に記載の排出装置。
- 前記先端は、患者の内部領域から前記排出内腔に向かって組織を掬い取るように構成されていることを特徴とする、請求項7に記載の排出装置。
- 前記栓子の前記遠位端は、概ねドーム形又は円錐形の形状を有する先端を具備することを特徴とする、請求項1乃至請求項8のいずれか1項に記載の排出装置。
- 第1の視覚化要素及び第2の視覚化要素を具備し、前記第1の視覚化要素及び第2の視覚化要素のうちの一方が前記細長い本体内に配置され、前記第1の視覚化要素及び第2の視覚化要素のうちの他の一方が、前記細長い本体の先端に配置されていることを特徴とする、請求項1乃至請求項9のいずれか1項に記載の排出装置。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662309918P | 2016-03-17 | 2016-03-17 | |
| US62/309,918 | 2016-03-17 | ||
| US201762470095P | 2017-03-10 | 2017-03-10 | |
| US62/470,095 | 2017-03-10 | ||
| PCT/US2017/022794 WO2017161177A1 (en) | 2016-03-17 | 2017-03-16 | Clot evacuation and visualization devices and methods of use |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019515762A JP2019515762A (ja) | 2019-06-13 |
| JP2019515762A5 JP2019515762A5 (ja) | 2020-04-16 |
| JP7026645B2 true JP7026645B2 (ja) | 2022-02-28 |
Family
ID=58489059
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018568173A Active JP7026645B2 (ja) | 2016-03-17 | 2017-03-16 | 凝血塊の排出及び視覚化装置及び使用方法 |
Country Status (9)
| Country | Link |
|---|---|
| US (2) | US10716585B2 (ja) |
| EP (1) | EP3429487A1 (ja) |
| JP (1) | JP7026645B2 (ja) |
| CN (1) | CN109152584B (ja) |
| AU (1) | AU2017233052A1 (ja) |
| BR (1) | BR112018068833A2 (ja) |
| CA (1) | CA3016336A1 (ja) |
| IL (1) | IL261749A (ja) |
| WO (1) | WO2017161177A1 (ja) |
Families Citing this family (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7335180B2 (en) | 2003-11-24 | 2008-02-26 | Flowcardia, Inc. | Steerable ultrasound catheter |
| US7758510B2 (en) | 2003-09-19 | 2010-07-20 | Flowcardia, Inc. | Connector for securing ultrasound catheter to transducer |
| RU2640564C2 (ru) | 2012-08-02 | 2018-01-09 | Бард Периферэл Васкьюлар | Ультразвуковая катетерная система |
| US11191886B2 (en) * | 2013-06-14 | 2021-12-07 | The Cleveland Clinic Foundation | Motion-assisted systems, devices and methods for minimizing obstruction of medical devices |
| US10342579B2 (en) | 2014-01-13 | 2019-07-09 | Trice Medical, Inc. | Fully integrated, disposable tissue visualization device |
| US11547446B2 (en) | 2014-01-13 | 2023-01-10 | Trice Medical, Inc. | Fully integrated, disposable tissue visualization device |
| WO2017027749A1 (en) | 2015-08-11 | 2017-02-16 | Trice Medical, Inc. | Fully integrated, disposable tissue visualization device |
| CN109152584B (zh) | 2016-03-17 | 2022-03-04 | 特里斯医疗有限公司 | 凝块排出和可视化装置及使用方法 |
| EP3506817A4 (en) | 2016-08-30 | 2020-07-22 | The Regents of The University of California | METHOD FOR BIOMEDICAL TARGETING AND RELEASE, AND DEVICES AND SYSTEMS FOR IMPLEMENTING THEM |
| US11096560B2 (en) | 2016-09-23 | 2021-08-24 | Meditrina, Inc. | Endoscope with multiple image sensors |
| US20180140321A1 (en) * | 2016-11-23 | 2018-05-24 | C. R. Bard, Inc. | Catheter With Retractable Sheath And Methods Thereof |
| US10582983B2 (en) | 2017-02-06 | 2020-03-10 | C. R. Bard, Inc. | Ultrasonic endovascular catheter with a controllable sheath |
| US11835707B2 (en) * | 2017-05-04 | 2023-12-05 | Massachusetts Institute Of Technology | Scanning optical imaging device |
| JP7229989B2 (ja) | 2017-07-17 | 2023-02-28 | ボイジャー セラピューティクス インコーポレイテッド | 軌道アレイガイドシステム |
| MA49642A (fr) * | 2017-07-17 | 2020-05-27 | 3Nt Medical Ltd | Système de visualisation d'oreille |
| CN109512473A (zh) * | 2017-09-20 | 2019-03-26 | 史军 | 带可视穿刺装置的医疗设备 |
| US20190110674A1 (en) * | 2017-10-18 | 2019-04-18 | Douglas P. Allen | Surgical access device incorporating scope cleaner |
| US20190246884A1 (en) * | 2018-02-14 | 2019-08-15 | Suzhou Acuvu Medical Technology Co. Ltd | Endoscopy system with off-center direction of view |
| CN112040880A (zh) | 2018-02-15 | 2020-12-04 | 米奈特朗尼克斯神经有限公司 | 用于进入中枢神经系统的医疗装置 |
| WO2019191705A1 (en) * | 2018-03-29 | 2019-10-03 | Trice Medical, Inc. | Fully integrated endoscope with biopsy capabilities and methods of use |
| EP3829413A4 (en) * | 2018-08-27 | 2022-05-18 | Meditrina, Inc. | ENDOSCOPE AND METHOD OF USE |
| US11298506B2 (en) * | 2018-09-17 | 2022-04-12 | Stryker Corporation | Intra-ventricular infusion and evacuation catheter for treatment of intracerebral hemorrhage (ICH) |
| US11089947B2 (en) * | 2018-11-15 | 2021-08-17 | Biosense Webster (Israel) Ltd. | Catheter with irrigator and/or aspirator and with fiber-optic brain-clot analyzer |
| US11077288B2 (en) | 2018-11-15 | 2021-08-03 | Biosense Webster (Israel) Ltd. | Flushing balloon catheter for observation and removal of clots under vessel bifurcation conditions |
| US11937785B2 (en) * | 2018-12-05 | 2024-03-26 | Hoya Corporation | Endoscope, distal tip piece, and method of manufacturing endoscope |
| US11723745B2 (en) | 2018-12-06 | 2023-08-15 | Rebound Therapeutics Corporation | Cannula and proximally mounted camera with an imaging control system for rotating images |
| WO2020121373A1 (ja) * | 2018-12-10 | 2020-06-18 | オリンパス株式会社 | 画像記録装置 |
| WO2020123589A1 (en) * | 2018-12-11 | 2020-06-18 | University Of Washington | Systems and methods for synchronized suction-injection angioscope |
| US10492670B1 (en) * | 2018-12-18 | 2019-12-03 | 3Nt Medical Ltd. | Ear visualization and treatment system |
| WO2020142846A1 (en) | 2019-01-09 | 2020-07-16 | Vena Medical Holdings Corp. | Cerebrovascular pathology viewing and treatment apparatus |
| GB2617516B (en) * | 2019-04-30 | 2024-02-14 | Terumo Cardiovascular Sys Corp | Endoscopic vessel harvester with gyrosensor for rotating camera view |
| US20220265312A1 (en) * | 2019-07-29 | 2022-08-25 | Bionaut Labs Ltd. | Devices for safe and reliable access to sub arachnoid and subdural space |
| CN110558922B (zh) * | 2019-09-02 | 2021-11-23 | 西安交通大学医学院第一附属医院 | 一种带有吸引装置的神经内镜及其使用方法 |
| US11501255B2 (en) | 2020-05-01 | 2022-11-15 | Monday.com Ltd. | Digital processing systems and methods for virtual file-based electronic white board in collaborative work systems |
| EP4161346A2 (en) * | 2020-06-05 | 2023-04-12 | Cook Medical Technologies LLC | Medical scopes for delivering therapeutic agents |
| US11259695B2 (en) | 2020-07-21 | 2022-03-01 | Meditrina, Inc. | Endoscope and method of use |
| KR20240004440A (ko) * | 2021-04-01 | 2024-01-11 | 레스넨트, 엘엘씨 | 정형외과용 관절경 광학 캐뉼라 시스템 |
| WO2022251739A1 (en) * | 2021-05-28 | 2022-12-01 | Morejon Orlando V | Targeted suction catheter |
| WO2023007494A1 (en) * | 2021-07-26 | 2023-02-02 | Ergogi Ltd | External work/suction channel and clot trimmer passing therethrough |
| CN113647889A (zh) * | 2021-09-15 | 2021-11-16 | 中国科学院长春光学精密机械与物理研究所 | 内窥镜一次性多用套管 |
| CN115381386B (zh) * | 2022-08-29 | 2024-04-09 | 湖南省华芯医疗器械有限公司 | 一种远端可翻转的摄像模组、内窥镜及内窥镜的控制方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002512836A (ja) | 1998-04-29 | 2002-05-08 | エンボル−エックス・インコーポレイテッド | アジャスタブル血液濾過システム |
| US20060030785A1 (en) | 2004-05-11 | 2006-02-09 | Inrad, Inc. | Core biopsy device |
| US20070083100A1 (en) | 2005-07-20 | 2007-04-12 | Sebastian Schulz-Stubner | Ventriculostomy Catheter with In Situ Ultrasound Capability |
| US20140012083A1 (en) | 2012-07-05 | 2014-01-09 | Pavilion Medical Innovations, Llc | Endoscopic Cannulas and Methods of Using the Same |
Family Cites Families (153)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH062122B2 (ja) * | 1987-12-02 | 1994-01-12 | オリンパス光学工業株式会社 | 脳手術装置 |
| US5395312A (en) * | 1991-10-18 | 1995-03-07 | Desai; Ashvin | Surgical tool |
| US5607443A (en) | 1992-06-02 | 1997-03-04 | General Surgical Innovations, Inc. | Expansible tunneling apparatus for creating an anatomic working space with laparoscopic observation |
| US5540711A (en) | 1992-06-02 | 1996-07-30 | General Surgical Innovations, Inc. | Apparatus and method for developing an anatomic space for laparoscopic procedures with laparoscopic visualization |
| US5334150A (en) | 1992-11-17 | 1994-08-02 | Kaali Steven G | Visually directed trocar for laparoscopic surgical procedures and method of using same |
| US5467762A (en) | 1993-09-13 | 1995-11-21 | United States Surgical Corporation | Optical trocar |
| CA2149290C (en) | 1994-05-26 | 2006-07-18 | Carl T. Urban | Optical trocar |
| US5591192A (en) | 1995-02-01 | 1997-01-07 | Ethicon Endo-Surgery, Inc. | Surgical penetration instrument including an imaging element |
| US5738628A (en) | 1995-03-24 | 1998-04-14 | Ethicon Endo-Surgery, Inc. | Surgical dissector and method for its use |
| JP2937101B2 (ja) * | 1995-12-08 | 1999-08-23 | 健一 赤石 | 内視鏡装置 |
| US6010449A (en) | 1997-02-28 | 2000-01-04 | Lumend, Inc. | Intravascular catheter system for treating a vascular occlusion |
| US6024751A (en) * | 1997-04-11 | 2000-02-15 | Coherent Inc. | Method and apparatus for transurethral resection of the prostate |
| DE19726141A1 (de) | 1997-06-19 | 1999-01-28 | Daum Gmbh | Neurotrokar |
| US6178346B1 (en) | 1998-10-23 | 2001-01-23 | David C. Amundson | Infrared endoscopic imaging in a liquid with suspended particles: method and apparatus |
| US6660013B2 (en) | 1999-10-05 | 2003-12-09 | Omnisonics Medical Technologies, Inc. | Apparatus for removing plaque from blood vessels using ultrasonic energy |
| US6599237B1 (en) * | 2000-01-10 | 2003-07-29 | Errol O. Singh | Instrument and method for facilitating endoscopic examination and surgical procedures |
| US6975898B2 (en) | 2000-06-19 | 2005-12-13 | University Of Washington | Medical imaging, diagnosis, and therapy using a scanning single optical fiber system |
| US6740102B2 (en) * | 2001-09-28 | 2004-05-25 | Ethicon, Inc. | Vessel harvesting retractor with bilateral electrosurgical ligation |
| US6462365B1 (en) | 2001-11-06 | 2002-10-08 | Omnivision Technologies, Inc. | Active pixel having reduced dark current in a CMOS image sensor |
| US20050014995A1 (en) | 2001-11-09 | 2005-01-20 | David Amundson | Direct, real-time imaging guidance of cardiac catheterization |
| CA2503081A1 (en) | 2002-10-23 | 2004-05-06 | Intellimed Surgical Solutions, Llc | Direct vision port site dissector |
| US6818962B2 (en) | 2002-10-25 | 2004-11-16 | Omnivision International Holding Ltd | Image sensor having integrated thin film infrared filter |
| US20050020914A1 (en) | 2002-11-12 | 2005-01-27 | David Amundson | Coronary sinus access catheter with forward-imaging |
| US7186249B1 (en) | 2003-01-16 | 2007-03-06 | Alfiero Balzano | Thermally conductive surgical probe |
| US20050154262A1 (en) | 2003-04-01 | 2005-07-14 | Banik Michael S. | Imaging system for video endoscope |
| US20050222499A1 (en) | 2003-04-01 | 2005-10-06 | Banik Michael S | Interface for video endoscope system |
| US7209601B2 (en) | 2003-07-22 | 2007-04-24 | Omnivision Technologies, Inc. | CMOS image sensor using high frame rate with frame addition and movement compensation |
| US7022965B2 (en) | 2003-07-22 | 2006-04-04 | Omnivision Tehnologies, Inc. | Low voltage active CMOS pixel on an N-type substrate with complete reset |
| US20060058837A1 (en) | 2004-09-10 | 2006-03-16 | Arani Bose | System and method for treating ischemic stroke |
| US8366735B2 (en) | 2004-09-10 | 2013-02-05 | Penumbra, Inc. | System and method for treating ischemic stroke |
| US9655633B2 (en) | 2004-09-10 | 2017-05-23 | Penumbra, Inc. | System and method for treating ischemic stroke |
| US7193198B2 (en) | 2004-10-01 | 2007-03-20 | Omnivision Technologies, Inc. | Image sensor and pixel that has variable capacitance output or floating node |
| US7154137B2 (en) | 2004-10-12 | 2006-12-26 | Omnivision Technologies, Inc. | Image sensor and pixel having a non-convex photodiode |
| US7355228B2 (en) | 2004-10-15 | 2008-04-08 | Omnivision Technologies, Inc. | Image sensor pixel having photodiode with multi-dopant implantation |
| US9387010B2 (en) | 2004-10-28 | 2016-07-12 | Nico Corporation | Surgical access assembly and method of using same |
| US9770261B2 (en) | 2004-10-28 | 2017-09-26 | Nico Corporation | Surgical access assembly and method of using same |
| US9579121B2 (en) | 2004-10-28 | 2017-02-28 | Nico Corporation | Holding arrangement for a surgical access system |
| US9216015B2 (en) | 2004-10-28 | 2015-12-22 | Vycor Medical, Inc. | Apparatus and methods for performing brain surgery |
| US9265523B2 (en) | 2011-10-24 | 2016-02-23 | Nico Corporation | Surgical access system with navigation element and method of using same |
| US9161820B2 (en) | 2004-10-28 | 2015-10-20 | Nico Corporation | Surgical access assembly and method of using same |
| US20080109026A1 (en) | 2004-10-28 | 2008-05-08 | Strategic Technology Assessment Group | Apparatus and Methods for Performing Brain Surgery |
| US7196314B2 (en) | 2004-11-09 | 2007-03-27 | Omnivision Technologies, Inc. | Image sensor and pixel having an anti-reflective coating over the photodiode |
| US7345330B2 (en) | 2004-12-09 | 2008-03-18 | Omnivision Technologies, Inc. | Local interconnect structure and method for a CMOS image sensor |
| US20060206178A1 (en) * | 2005-03-11 | 2006-09-14 | Kim Daniel H | Percutaneous endoscopic access tools for the spinal epidural space and related methods of treatment |
| US7828720B2 (en) | 2005-04-20 | 2010-11-09 | Nico Corporation | Surgical adapter |
| US20060287583A1 (en) | 2005-06-17 | 2006-12-21 | Pool Cover Corporation | Surgical access instruments for use with delicate tissues |
| US20120330196A1 (en) | 2005-06-24 | 2012-12-27 | Penumbra Inc. | Methods and Apparatus for Removing Blood Clots and Tissue from the Patient's Head |
| US20070129652A1 (en) | 2005-11-15 | 2007-06-07 | Henry Nita | Methods and apparatus for intracranial ultrasound therapies |
| US7717853B2 (en) | 2005-06-24 | 2010-05-18 | Henry Nita | Methods and apparatus for intracranial ultrasound delivery |
| US20110160621A1 (en) | 2005-06-24 | 2011-06-30 | Henry Nita | Methods and apparatus for dissolving intracranial blood clots |
| US20120078140A1 (en) | 2005-06-24 | 2012-03-29 | Penumbra, Inc. | Method and Apparatus for Removing Blood Clots and Tissue from the Patient's Head |
| US20110319927A1 (en) | 2005-06-24 | 2011-12-29 | Penumbra, Inc. | Methods and apparatus for removing blood clots from intracranial aneurysms |
| US20110313328A1 (en) | 2005-06-24 | 2011-12-22 | Penumbra, Inc. | Methods and apparatus for dissolving blockages in intracranial catheters |
| US7344910B2 (en) | 2005-09-27 | 2008-03-18 | Omnivision Technologies, Inc. | Self-aligned photodiode for CMOS image sensor and method of making |
| US7871392B2 (en) | 2006-01-12 | 2011-01-18 | Integra Lifesciences (Ireland) Ltd. | Endoscopic ultrasonic surgical aspirator for use in fluid filled cavities |
| US7268335B2 (en) | 2006-01-27 | 2007-09-11 | Omnivision Technologies, Inc. | Image sensing devices, image sensor modules, and associated methods |
| US20120150147A1 (en) | 2010-12-08 | 2012-06-14 | Penumbra, Inc. | System and method for treating ischemic stroke |
| CN101415380B (zh) | 2006-04-07 | 2012-06-20 | 半影公司 | 动脉瘤阻塞装置 |
| US9615832B2 (en) | 2006-04-07 | 2017-04-11 | Penumbra, Inc. | Aneurysm occlusion system and method |
| US20090281386A1 (en) * | 2006-04-19 | 2009-11-12 | Acosta Pablo G | Devices, system and methods for minimally invasive abdominal surgical procedures |
| US20070260273A1 (en) | 2006-05-08 | 2007-11-08 | Ethicon Endo-Surgery, Inc. | Endoscopic Translumenal Surgical Systems |
| US20080015478A1 (en) | 2006-07-17 | 2008-01-17 | Arani Bose | Counter pulsation system and method for stroke recovery treatment |
| US7927272B2 (en) | 2006-08-04 | 2011-04-19 | Avantis Medical Systems, Inc. | Surgical port with embedded imaging device |
| US20100286477A1 (en) | 2009-05-08 | 2010-11-11 | Ouyang Xiaolong | Internal tissue visualization system comprising a rf-shielded visualization sensor module |
| US20080167527A1 (en) * | 2007-01-09 | 2008-07-10 | Slenker Dale E | Surgical systems and methods for biofilm removal, including a sheath for use therewith |
| US20080183192A1 (en) | 2007-01-26 | 2008-07-31 | Laurimed Llc | Contralateral insertion method to treat herniation with device using visualization components |
| US8690864B2 (en) | 2007-03-09 | 2014-04-08 | Covidien Lp | System and method for controlling tissue treatment |
| GB0708761D0 (en) * | 2007-05-04 | 2007-06-13 | Evexar Medical Ltd | Improvements in and relating to medical instruments |
| US20080319355A1 (en) | 2007-06-20 | 2008-12-25 | Henry Nita | Ischemic stroke therapy |
| EP2494932B1 (en) | 2007-06-22 | 2020-05-20 | Ekos Corporation | Apparatus for treatment of intracranial hemorrhages |
| US20090030400A1 (en) | 2007-07-25 | 2009-01-29 | Arani Bose | System and method for intracranial access |
| US20090062872A1 (en) | 2007-08-27 | 2009-03-05 | Singfatt Chin | Balloon cannula system for accessing and visualizing spine and related methods |
| CA2699375C (en) | 2007-09-12 | 2016-04-19 | Promex Technologies, Llc | Surgical cutting instrument |
| US8066757B2 (en) | 2007-10-17 | 2011-11-29 | Mindframe, Inc. | Blood flow restoration and thrombus management methods |
| US8333796B2 (en) | 2008-07-15 | 2012-12-18 | Penumbra, Inc. | Embolic coil implant system and implantation method |
| US20100022824A1 (en) | 2008-07-22 | 2010-01-28 | Cybulski James S | Tissue modification devices and methods of using the same |
| FR2935252B1 (fr) * | 2008-09-01 | 2011-03-04 | Axess Vision Technology | Instrument pour endoscope. |
| US20100081873A1 (en) | 2008-09-30 | 2010-04-01 | AiHeart Medical Technologies, Inc. | Systems and methods for optical viewing and therapeutic intervention in blood vessels |
| US8206315B2 (en) | 2008-09-30 | 2012-06-26 | Suros Surgical Systems, Inc. | Real-time pathology |
| US20150157387A1 (en) | 2008-11-12 | 2015-06-11 | Trice Medical, Inc. | Tissue visualization and modification devices and methods |
| US20110276113A1 (en) | 2010-04-12 | 2011-11-10 | Cybulski James S | RF Tissue Modulation Devices and Methods of Using the Same |
| US20100121139A1 (en) | 2008-11-12 | 2010-05-13 | Ouyang Xiaolong | Minimally Invasive Imaging Systems |
| US20100121142A1 (en) | 2008-11-12 | 2010-05-13 | Ouyang Xiaolong | Minimally Invasive Imaging Device |
| US9504247B2 (en) | 2008-12-16 | 2016-11-29 | Nico Corporation | System for collecting and preserving tissue cores |
| US8357175B2 (en) | 2008-12-16 | 2013-01-22 | Nico Corporation | Positioning system for tissue removal device |
| US8460327B2 (en) | 2008-12-16 | 2013-06-11 | Nico Corporation | Tissue removal device for neurosurgical and spinal surgery applications |
| US20100152762A1 (en) | 2008-12-16 | 2010-06-17 | Mark Joseph L | Tissue removal system with multi-directional foot actuator assembly for neurosurgical and spinal surgery applications |
| US8430825B2 (en) | 2008-12-16 | 2013-04-30 | Nico Corporation | Tissue removal device for neurosurgical and spinal surgery applications |
| US9931105B2 (en) | 2008-12-16 | 2018-04-03 | Nico Corporation | System and method of taking and collecting tissue cores for treatment |
| US9216031B2 (en) | 2008-12-16 | 2015-12-22 | Nico Corporation | Tissue removal device with adjustable fluid supply sleeve for neurosurgical and spinal surgery applications |
| US8496599B2 (en) | 2008-12-16 | 2013-07-30 | Nico Corporation | Tissue removal device for neurosurgical and spinal surgery applications |
| US10368890B2 (en) | 2008-12-16 | 2019-08-06 | Nico Corporation | Multi-functional surgical device for neurosurgical and spinal surgery applications |
| US8702738B2 (en) | 2008-12-16 | 2014-04-22 | Nico Corporation | Tissue removal device for neurosurgical and spinal surgery applications |
| US10080578B2 (en) | 2008-12-16 | 2018-09-25 | Nico Corporation | Tissue removal device with adjustable delivery sleeve for neurosurgical and spinal surgery applications |
| US8657841B2 (en) | 2008-12-16 | 2014-02-25 | Nico Corporation | Tissue removal device for neurosurgical and spinal surgery applications |
| US9279751B2 (en) | 2008-12-16 | 2016-03-08 | Nico Corporation | System and method of taking and collecting tissue cores for treatment |
| US9820480B2 (en) | 2008-12-16 | 2017-11-21 | Nico Corporation | System for collecting and preserving tissue cores |
| US20100204672A1 (en) | 2009-02-12 | 2010-08-12 | Penumra, Inc. | System and method for treating ischemic stroke |
| US8903476B2 (en) | 2009-03-08 | 2014-12-02 | Oprobe, Llc | Multi-function optical probe system for medical and veterinary applications |
| WO2010111785A1 (en) | 2009-03-31 | 2010-10-07 | Sunnybrook Health Science Centre | Medical device with means to improve transmission of torque along a rotational drive shaft |
| US8343035B2 (en) | 2009-04-20 | 2013-01-01 | Spine View, Inc. | Dilator with direct visualization |
| US20100284580A1 (en) | 2009-05-07 | 2010-11-11 | Ouyang Xiaolong | Tissue visualization systems and methods for using the same |
| US8911487B2 (en) | 2009-09-22 | 2014-12-16 | Penumbra, Inc. | Manual actuation system for deployment of implant |
| US9814392B2 (en) | 2009-10-30 | 2017-11-14 | The Johns Hopkins University | Visual tracking and annotaton of clinically important anatomical landmarks for surgical interventions |
| US20130237753A1 (en) | 2009-11-06 | 2013-09-12 | Nico Corporation | Surgical interface for use with endoscope |
| KR20120101676A (ko) | 2009-11-06 | 2012-09-14 | 니코 코포레이션 | 내시경과 함께 사용되는 수술용 어댑터 |
| US9226774B2 (en) * | 2009-12-17 | 2016-01-05 | Covidien Lp | Visual obturator with tip openings |
| US20110184454A1 (en) | 2010-01-27 | 2011-07-28 | Penumbra, Inc. | Embolic implants |
| US8486097B2 (en) | 2010-02-04 | 2013-07-16 | Nico Corporation | Tissue cutting device |
| US8986334B2 (en) | 2010-02-04 | 2015-03-24 | Nico Corporation | Tissue removal device with tissue grip |
| US8230867B2 (en) | 2010-02-04 | 2012-07-31 | Nico Corporation | Method for performing a surgical procedure |
| US20120078285A1 (en) | 2010-04-01 | 2012-03-29 | Penumbra, Inc. | Balloon catheter for intravascular therapies |
| JP5934219B2 (ja) | 2010-09-03 | 2016-06-15 | ユニヴァーシティ オブ ワシントン | 脳神経外科手術用デバイス及び関連したシステム及び方法 |
| DE102010060877B4 (de) | 2010-11-29 | 2013-08-29 | Reiner Kunz | Trokaranordnung |
| WO2013049837A1 (en) | 2011-09-30 | 2013-04-04 | Medicalcue, Inc. | Umbilical probe measurement systems |
| US8584853B2 (en) | 2012-02-16 | 2013-11-19 | Biomedical Enterprises, Inc. | Method and apparatus for an orthopedic fixation system |
| US9901245B2 (en) | 2012-02-22 | 2018-02-27 | Carter J. Kovarik | Selectively bendable remote gripping tool |
| US9757147B2 (en) | 2012-04-11 | 2017-09-12 | Nico Corporation | Surgical access system with navigation element and method of using same |
| US9883881B2 (en) | 2012-05-31 | 2018-02-06 | Nico Corporation | Motor driven surgical instrument with fluid control circuit |
| US9775672B2 (en) | 2012-08-31 | 2017-10-03 | Nico Corporation | Bi-polar surgical instrument |
| US10383680B2 (en) | 2012-08-31 | 2019-08-20 | Nico Corporation | Bi-polar surgical instrument |
| US10342564B2 (en) | 2012-09-27 | 2019-07-09 | Nico Corporation | Variable aspiration control device |
| US9445831B2 (en) | 2012-09-27 | 2016-09-20 | Nico Corporation | Variable aspiration control device |
| US9795440B2 (en) | 2012-12-06 | 2017-10-24 | Nico Corporation | Single lumen cautery forceps |
| US9737648B2 (en) | 2012-12-06 | 2017-08-22 | Nico Corporation | Aspirating cautery forceps |
| US10022520B2 (en) | 2012-12-17 | 2018-07-17 | Nico Corporation | Surgical access system |
| US20140180377A1 (en) | 2012-12-20 | 2014-06-26 | Penumbra, Inc. | Aneurysm occlusion system and method |
| AU2014226487A1 (en) * | 2013-03-05 | 2015-09-03 | Nico Corporation | Surgical access assembly and method of using same |
| US20140276024A1 (en) | 2013-03-12 | 2014-09-18 | Volcano Corporation | Imaging and delivering thrombolytic agents to biological material inside a vessel |
| US10149695B2 (en) | 2013-03-15 | 2018-12-11 | Nico Corporation | Microsurgical instruments |
| US10398458B2 (en) | 2013-03-15 | 2019-09-03 | Nico Corporation | Microsurgical instruments |
| CA2902771C (en) | 2013-03-15 | 2018-08-14 | Synaptive Medical (Barbados) Inc. | Context aware surgical systems |
| US20140324080A1 (en) | 2013-04-25 | 2014-10-30 | Michael P. Wallace | Intracerebral hemorrhage treatment |
| US20150038902A1 (en) | 2013-08-05 | 2015-02-05 | Nico Corporation | Infusion therapy device |
| WO2015074045A2 (en) | 2013-11-18 | 2015-05-21 | Jeremy Stigall | Therapeutic delivery catheter with imaging and tissue characterization |
| EP3087424A4 (en) | 2013-12-23 | 2017-09-27 | Camplex, Inc. | Surgical visualization systems |
| US10342579B2 (en) | 2014-01-13 | 2019-07-09 | Trice Medical, Inc. | Fully integrated, disposable tissue visualization device |
| US9370295B2 (en) | 2014-01-13 | 2016-06-21 | Trice Medical, Inc. | Fully integrated, disposable tissue visualization device |
| US20150297097A1 (en) | 2014-01-14 | 2015-10-22 | Volcano Corporation | Vascular access evaluation and treatment |
| US11224437B2 (en) | 2014-01-14 | 2022-01-18 | Penumbra, Inc. | Soft embolic implant |
| WO2015108973A1 (en) | 2014-01-14 | 2015-07-23 | Volcano Corporation | Methods and systems for clearing thrombus from a vascular access site |
| US20150313634A1 (en) * | 2014-05-05 | 2015-11-05 | Rainbow Medical Ltd. | Pericardial access device |
| JP2017515593A (ja) | 2014-05-13 | 2017-06-15 | ビコール メディカル,インコーポレイティド | 手術用導入器のための案内システム取付け部材 |
| JP2017521224A (ja) | 2014-07-23 | 2017-08-03 | ロバート・トリマルケ | 最小侵襲神経手術のためのアクセスポートの改良 |
| US10105161B2 (en) * | 2014-08-15 | 2018-10-23 | Covidien Lp | Obturator having an insufflation pathway and an instrument guide |
| CN105266748B (zh) * | 2014-09-23 | 2017-04-12 | 中国人民解放军第二军医大学 | 防组织损伤内窥镜闭孔器 |
| US10456061B2 (en) | 2014-11-12 | 2019-10-29 | Nico Corporation | Holding arrangement for a surgical access system |
| US9943321B2 (en) | 2014-12-16 | 2018-04-17 | Penumbra, Inc. | Methods and devices for removal of thromboembolic material |
| US20160166265A1 (en) | 2014-12-16 | 2016-06-16 | Penumbra Inc. | Methods and Devices for Removal of Thromboembolic Material |
| US10307181B2 (en) | 2015-03-12 | 2019-06-04 | Cameron Anthony Piron | System and method for guided port insertion to minimize trauma |
| US10357280B2 (en) | 2015-04-30 | 2019-07-23 | Nico Corporation | Navigating introducer for tissue access system |
| WO2017027749A1 (en) | 2015-08-11 | 2017-02-16 | Trice Medical, Inc. | Fully integrated, disposable tissue visualization device |
| CN109152584B (zh) | 2016-03-17 | 2022-03-04 | 特里斯医疗有限公司 | 凝块排出和可视化装置及使用方法 |
-
2017
- 2017-03-16 CN CN201780030659.3A patent/CN109152584B/zh active Active
- 2017-03-16 CA CA3016336A patent/CA3016336A1/en not_active Abandoned
- 2017-03-16 EP EP17715563.7A patent/EP3429487A1/en active Pending
- 2017-03-16 JP JP2018568173A patent/JP7026645B2/ja active Active
- 2017-03-16 WO PCT/US2017/022794 patent/WO2017161177A1/en active Application Filing
- 2017-03-16 BR BR112018068833A patent/BR112018068833A2/pt not_active Application Discontinuation
- 2017-03-16 AU AU2017233052A patent/AU2017233052A1/en not_active Abandoned
- 2017-03-17 US US15/461,994 patent/US10716585B2/en active Active
-
2018
- 2018-09-13 IL IL261749A patent/IL261749A/en unknown
-
2020
- 2020-07-20 US US16/933,338 patent/US20210000495A1/en not_active Abandoned
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002512836A (ja) | 1998-04-29 | 2002-05-08 | エンボル−エックス・インコーポレイテッド | アジャスタブル血液濾過システム |
| US20060030785A1 (en) | 2004-05-11 | 2006-02-09 | Inrad, Inc. | Core biopsy device |
| US20070083100A1 (en) | 2005-07-20 | 2007-04-12 | Sebastian Schulz-Stubner | Ventriculostomy Catheter with In Situ Ultrasound Capability |
| US20140012083A1 (en) | 2012-07-05 | 2014-01-09 | Pavilion Medical Innovations, Llc | Endoscopic Cannulas and Methods of Using the Same |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3429487A1 (en) | 2019-01-23 |
| US20170265879A1 (en) | 2017-09-21 |
| IL261749A (en) | 2018-10-31 |
| BR112018068833A2 (pt) | 2019-01-22 |
| JP2019515762A (ja) | 2019-06-13 |
| CN109152584B (zh) | 2022-03-04 |
| CN109152584A (zh) | 2019-01-04 |
| CA3016336A1 (en) | 2017-09-21 |
| AU2017233052A1 (en) | 2018-09-20 |
| US10716585B2 (en) | 2020-07-21 |
| US20210000495A1 (en) | 2021-01-07 |
| WO2017161177A1 (en) | 2017-09-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7026645B2 (ja) | 凝血塊の排出及び視覚化装置及び使用方法 | |
| EP3773235B1 (en) | Fully integrated endoscope with biopsy capabilities | |
| AU2019253909B2 (en) | Fully integrated, disposable tissue visualization device | |
| US10945588B2 (en) | Fully integrated, disposable tissue visualization device | |
| US10342579B2 (en) | Fully integrated, disposable tissue visualization device | |
| EP2632318B1 (en) | Apparatus for hysteroscopy and endometrial biopsy | |
| US11547446B2 (en) | Fully integrated, disposable tissue visualization device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200303 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200303 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210212 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210302 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20210514 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20210730 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210824 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220118 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220215 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7026645 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R154 | Certificate of patent or utility model (reissue) |
Free format text: JAPANESE INTERMEDIATE CODE: R154 |