JP5934219B2 - 脳神経外科手術用デバイス及び関連したシステム及び方法 - Google Patents
脳神経外科手術用デバイス及び関連したシステム及び方法 Download PDFInfo
- Publication number
- JP5934219B2 JP5934219B2 JP2013527362A JP2013527362A JP5934219B2 JP 5934219 B2 JP5934219 B2 JP 5934219B2 JP 2013527362 A JP2013527362 A JP 2013527362A JP 2013527362 A JP2013527362 A JP 2013527362A JP 5934219 B2 JP5934219 B2 JP 5934219B2
- Authority
- JP
- Japan
- Prior art keywords
- catheter
- neurosurgical
- neurosurgical catheter
- disrupter
- lumen
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320016—Endoscopic cutting instruments, e.g. arthroscopes, resectoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320016—Endoscopic cutting instruments, e.g. arthroscopes, resectoscopes
- A61B17/32002—Endoscopic cutting instruments, e.g. arthroscopes, resectoscopes with continuously rotating, oscillating or reciprocating cutting instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/3205—Excision instruments
- A61B17/3207—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions
- A61B17/320783—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions through side-hole, e.g. sliding or rotating cutter inside catheter
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/10—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis
- A61B90/11—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis with guides for needles or instruments, e.g. arcuate slides or ball joints
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M39/00—Tubes, tube connectors, tube couplings, valves, access sites or the like, specially adapted for medical use
- A61M39/02—Access sites
- A61M39/0247—Semi-permanent or permanent transcutaneous or percutaneous access sites to the inside of the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/3205—Excision instruments
- A61B17/3207—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions
- A61B17/320725—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions with radially expandable cutting or abrading elements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/3205—Excision instruments
- A61B17/3207—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions
- A61B17/320758—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions with a rotating cutting instrument, e.g. motor driven
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
- A61B2017/00318—Steering mechanisms
- A61B2017/00331—Steering mechanisms with preformed bends
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320016—Endoscopic cutting instruments, e.g. arthroscopes, resectoscopes
- A61B17/32002—Endoscopic cutting instruments, e.g. arthroscopes, resectoscopes with continuously rotating, oscillating or reciprocating cutting instruments
- A61B2017/320024—Morcellators, e.g. having a hollow cutting tube with an annular cutter for morcellating and removing tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B2017/320064—Surgical cutting instruments with tissue or sample retaining means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/3205—Excision instruments
- A61B17/3207—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions
- A61B17/320758—Atherectomy devices working by cutting or abrading; Similar devices specially adapted for non-vascular obstructions with a rotating cutting instrument, e.g. motor driven
- A61B2017/320775—Morcellators, impeller or propeller like means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/10—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis
- A61B2090/103—Cranial plugs for access to brain
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2217/00—General characteristics of surgical instruments
- A61B2217/002—Auxiliary appliance
- A61B2217/005—Auxiliary appliance with suction drainage system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0808—Detecting organic movements or changes, e.g. tumours, cysts, swellings for diagnosis of the brain
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/485—Diagnostic techniques involving measuring strain or elastic properties
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M39/00—Tubes, tube connectors, tube couplings, valves, access sites or the like, specially adapted for medical use
- A61M39/02—Access sites
- A61M39/0247—Semi-permanent or permanent transcutaneous or percutaneous access sites to the inside of the body
- A61M2039/025—Semi-permanent or permanent transcutaneous or percutaneous access sites to the inside of the body through bones or teeth, e.g. through the skull
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M39/00—Tubes, tube connectors, tube couplings, valves, access sites or the like, specially adapted for medical use
- A61M39/02—Access sites
- A61M39/0247—Semi-permanent or permanent transcutaneous or percutaneous access sites to the inside of the body
- A61M2039/0261—Means for anchoring port to the body, or ports having a special shape or being made of a specific material to allow easy implantation/integration in the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M39/00—Tubes, tube connectors, tube couplings, valves, access sites or the like, specially adapted for medical use
- A61M39/02—Access sites
- A61M39/0247—Semi-permanent or permanent transcutaneous or percutaneous access sites to the inside of the body
- A61M2039/027—Semi-permanent or permanent transcutaneous or percutaneous access sites to the inside of the body having a particular valve, seal or septum
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M39/00—Tubes, tube connectors, tube couplings, valves, access sites or the like, specially adapted for medical use
- A61M39/02—Access sites
- A61M39/0247—Semi-permanent or permanent transcutaneous or percutaneous access sites to the inside of the body
- A61M2039/0273—Semi-permanent or permanent transcutaneous or percutaneous access sites to the inside of the body for introducing catheters into the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M39/00—Tubes, tube connectors, tube couplings, valves, access sites or the like, specially adapted for medical use
- A61M39/02—Access sites
- A61M39/0247—Semi-permanent or permanent transcutaneous or percutaneous access sites to the inside of the body
- A61M2039/0279—Semi-permanent or permanent transcutaneous or percutaneous access sites to the inside of the body for introducing medical instruments into the body, e.g. endoscope, surgical tools
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M39/00—Tubes, tube connectors, tube couplings, valves, access sites or the like, specially adapted for medical use
- A61M39/02—Access sites
- A61M39/0247—Semi-permanent or permanent transcutaneous or percutaneous access sites to the inside of the body
- A61M2039/0288—Semi-permanent or permanent transcutaneous or percutaneous access sites to the inside of the body protectors, caps or covers therefor
Description
従来のカテーテル導入法は、代表的には、例えば血管形成術等の血管の用途で使用されていた。血管の用途では、血管が体内でのカテーテル導入経路を形成する。血管内で移動するため、カテーテルは、代表的には、可撓性でなければならず、血管の湾曲に従って徐々に曲がらなければならない。ターゲットに到達する上で必要とされるように血管枝部を通してナビゲートするため、操向可能カテーテルを使用できる。血管の用途とは異なり、CNS組織のカテーテル導入法は、代表的には、所定の解剖学的経路なしで前進される。その結果、CNS組織のカテーテル導入法を行うための従来のアプローチは、多くの場合、剛性カニューレを通る直線状経路を使用することに限られていた。これは、言語中枢組織及び脳構造を迂回して非直線状経路を介してナビゲートしなければCNSのターゲット部分にアクセスできない場合、不適切である。
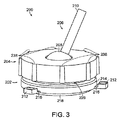
本技術の幾つかの実施例に従って形成されたデバイス及びシステムは、迅速に、正確に、安全に、及び低侵襲性で経頭蓋アクセスを行うように形成された、頭蓋骨マウント等のカテーテル導入口を含んでいてもよい。図3乃至図8は、本技術の一実施例に従って形成された頭蓋骨マウント200及びその部分を示す。頭蓋骨マウント200は、ベース202、キャップ204、及び調節自在の導入口206を含む。図3及び図4に示すように、調節自在の導入口206は、球状部分208及び方向部分210を含む。球状部分208は、調節自在の導入口206を特定の位置に係止するため、ベース202とキャップ204との間に捕捉される。球形自在継手と同様に、球状部分208をベース202とキャップ204との間に係止する前に、方向部分210の角度及び半径方向位置を定めるように球状部分の位置を調節できる。方向部分210をこれ以上傾けることができないようにキャップ204がブロックする角度が最大角度である。頭蓋骨マウント200では、最大角度は約30°である。本技術の幾つかの実施例に従って形成された変形例のカテーテル導入口は、調節自在の導入口と固定部分との間の半径方向移動範囲がこれよりも大きくてもよいし、小さくてもよい。
本技術の幾つかの実施例に従って形成されたカテーテルは、CNS内のターゲット領域を治療するための機能的構造を備えていてもよい。例えば、このようなカテーテルの遠位部分は、周囲組織への損傷を最少にして材料を除去するように形成されていてもよい。これは、健康な組織で発生する凝血塊を除去するのに特に有用である。周囲組織は、例えば、凝血塊を激しくちぎり取る又は引っ張ることによって損傷する。除去対象の凝血塊は、カテーテルと比べて比較的大きいことが多い。カテーテルの外部で凝血塊を切り分けるには激しい機械的作用が必要とされ、これは、周囲組織を損傷するおそれがある。凝血塊の表面は、多くの場合、一体性が高く、そのため、無傷の凝血塊表面に吸引作用を加えると、凝血塊を必要なだけ破壊して除去可能な小片にせずに凝血塊を過度に引っ張るおそれがある。このような方法とは異なり、本技術の幾つかの実施例に従って形成されたカテーテルは、例えば、カテーテルの内腔近くの、又はカテーテルの内腔内に突出した対象物の部分を切り離すことによって、対象物の表面を注意深く破壊する。別の態様では、又はこれに加えて、カテーテルは、別の形態の機械的作用(例えば、カテーテル内腔内に又はカテーテルの僅かに外側に加えられた作用)を使用して対象物の表面を破壊するように形成されていてもよい。凝血塊の材料は、例えば、通常は、破壊された表面を通して最少量の吸引力でカテーテルに吸い込まれる。
カテーテル導入口を通してカニューレ又はカテーテルをナビゲートするため、並びに周囲組織を監視するため、X線透視法又は超音波検査を含むデータ収集を使用できる。本技術の幾つかの実施例は、脳及び周囲構造のずれを実時間で斟酌するデータ収集システムを含む。他のデータ収集は、実時間で、又は遅延して行うことができる。本技術の幾つかの実施例で使用されたX線透視法は、CT−X線透視法、フラットパネルCT−X線透視法、及び3D二方向X線透視法を含む当該技術分野で周知の任意の種類のX線透視法を含む。本技術の幾つかの実施例に従って形成されたカテーテルは、撮影を補助するため、送出導管を介して造影剤(例えば血管内造影剤)を送出するように形成されていてもよい。X線透視法又は超音波検査を組み合わせるのが特に有効である。例えば、X線透視法を主にナビゲーションに使用でき、超音波検査(例えばAモード超音波検査)を確認又は小規模撮影に使用できる。超音波検査エレメントがカテーテルのチップに取り付けられた超音波検査システムは、手術中に大規模撮影(例えばX線透視法)を補助するため、縁部を正確に検出できる(例えば脳組織と凝血塊材料との間の界面の縁部を1mm以下の精度で検出できる)。
102 脳組織
103 言語中枢部分
104 カニューレ
106 開口部
108 頭蓋骨
110 経路
112 ターゲット領域
114 栓塞子
116 直線状部分
118 角形成部材
120 カテーテル
Claims (18)
- 脳神経外科手術用カテーテルにおいて、
前記カテーテルの遠位端部分に設けられた表面ディスラプタを含み、前記表面ディスラプタは、凝血塊表面を機械的に破壊するように構成されており、
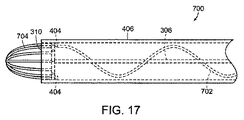
前記表面ディスラプタの近位側に設けられた細長い可撓性の細断器を更に含み、前記細断器は、内腔内で摺動自在かつ回転自在であり、吸引により前記内腔内に近位方向に引き込まれた凝血塊材料を細断するように構成されている、脳神経外科手術用カテーテル。 - 請求項1に記載の脳神経外科手術用カテーテルにおいて、
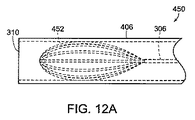
前記表面ディスラプタは、前記内腔内で折り畳まれた状態にあり、前記内腔の遠位端から延ばされるときに拡張状態に拡張するように構成されている、脳神経外科手術用カテーテル。 - 請求項1に記載の脳神経外科手術用カテーテルにおいて、
前記表面ディスラプタは、前記凝血塊表面に接触するように位置決めされた二つ又はそれ以上の円弧状ワイヤを含む、脳神経外科手術用カテーテル。 - 請求項1に記載の脳神経外科手術用カテーテルにおいて、
前記表面ディスラプタは、回転楕円体又は回転楕円体の一部の形状をなしている、脳神経外科手術用カテーテル。 - 請求項1に記載の脳神経外科手術用カテーテルにおいて、
前記表面ディスラプタは、前記凝血塊表面に接触するように位置決めされた研磨表面を含む、脳神経外科手術用カテーテル。 - 請求項1に記載の脳神経外科手術用カテーテルにおいて、更に、
前記細断器の近位側に設けられた細長い可撓性ドライバーを含み、前記ドライバーは、前記内腔内で摺動自在かつ回転自在である、脳神経外科手術用カテーテル。 - 請求項1に記載の脳神経外科手術用カテーテルにおいて、更に、
超音波トランスジューサを含む、脳神経外科手術用カテーテル。 - 請求項7に記載の脳神経外科手術用カテーテルにおいて、
前記カテーテルは、前記カテーテルの前記遠位部分のチップに設けられたチップ超音波トランスジューサ、及び前記カテーテルの前記遠位部分の横壁に設けられた二つ又はそれ以上の半径方向超音波トランスジューサを含む、脳神経外科手術用カテーテル。 - 請求項1に記載の脳神経外科手術用カテーテルにおいて、
前記内腔内で前記細断器を軸線方向に移動させることによって、前記表面ディスラプタは、前記内腔内で軸線方向に移動される、脳神経外科用カテーテル。 - 請求項1に記載の脳神経外科手術用カテーテルにおいて、
前記細断器は、螺旋形状である、脳神経外科手術用カテーテル。 - 請求項1に記載の脳神経外科手術用カテーテルにおいて、
前記表面ディスラプタは、前記凝血塊表面を切り離すことによって前記凝血塊表面を機械的に破壊するように構成されている、脳神経外科手術用カテーテル。 - 請求項1に記載の脳神経外科手術用カテーテルにおいて、
前記表面ディスラプタは、鈍い遠位端を有する、脳神経外科手術用カテーテル。 - 請求項1に記載の脳神経外科手術用カテーテルにおいて、
前記表面ディスラプタは、細断された凝血塊材料を前記内腔を通して近位方向に引く、脳神経外科手術用カテーテル。 - 請求項1に記載の脳神経外科手術用カテーテルにおいて、
前記細断器は、ワイヤ鞭である、脳神経外科手術用カテーテル。 - 請求項14に記載の脳神経外科手術用カテーテルにおいて、
前記ワイヤ鞭は、弾性的に螺旋形状に移動する、脳神経外科手術用カテーテル。 - 請求項2に記載の脳神経外科手術用カテーテルにおいて、
前記表面ディスラプタの前記拡張状態は、前記表面ディスラプタの弛緩された状態である、脳神経外科手術用カテーテル。 - 請求項3に記載の脳神経外科手術用カテーテルにおいて、
前記表面ディスラプタは、泡立て器形状である、脳神経外科手術用カテーテル。 - 請求項6に記載の脳神経外科手術用カテーテルにおいて、
前記カテーテルの径は、前記細断器から前記ドライバーに向かって小さくなる、脳神経外科手術用カテーテル。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US38003010P | 2010-09-03 | 2010-09-03 | |
| US61/380,030 | 2010-09-03 | ||
| PCT/US2011/050443 WO2012031275A2 (en) | 2010-09-03 | 2011-09-02 | Neurosurgical devices and associated systems and methods |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016092980A Division JP2016154934A (ja) | 2010-09-03 | 2016-05-06 | 脳神経外科手術用デバイス及び関連したシステム及び方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013536740A JP2013536740A (ja) | 2013-09-26 |
| JP2013536740A5 JP2013536740A5 (ja) | 2014-10-16 |
| JP5934219B2 true JP5934219B2 (ja) | 2016-06-15 |
Family
ID=44651998
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013527362A Expired - Fee Related JP5934219B2 (ja) | 2010-09-03 | 2011-09-02 | 脳神経外科手術用デバイス及び関連したシステム及び方法 |
| JP2016092980A Pending JP2016154934A (ja) | 2010-09-03 | 2016-05-06 | 脳神経外科手術用デバイス及び関連したシステム及び方法 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016092980A Pending JP2016154934A (ja) | 2010-09-03 | 2016-05-06 | 脳神経外科手術用デバイス及び関連したシステム及び方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20130158578A1 (ja) |
| EP (1) | EP2611370A2 (ja) |
| JP (2) | JP5934219B2 (ja) |
| WO (1) | WO2012031275A2 (ja) |
Families Citing this family (56)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7981128B2 (en) | 2006-06-30 | 2011-07-19 | Atheromed, Inc. | Atherectomy devices and methods |
| US8361094B2 (en) | 2006-06-30 | 2013-01-29 | Atheromed, Inc. | Atherectomy devices and methods |
| US9492192B2 (en) * | 2006-06-30 | 2016-11-15 | Atheromed, Inc. | Atherectomy devices, systems, and methods |
| US20080045986A1 (en) | 2006-06-30 | 2008-02-21 | Atheromed, Inc. | Atherectomy devices and methods |
| EP3308725B1 (en) | 2006-06-30 | 2023-06-14 | Atheromed, Inc. | Contra-rotating cutting assembly and atherectomy device |
| US20090018566A1 (en) | 2006-06-30 | 2009-01-15 | Artheromed, Inc. | Atherectomy devices, systems, and methods |
| GB0616411D0 (en) | 2006-08-18 | 2006-09-27 | Renishaw Plc | Neurosurgical instruments |
| US8070762B2 (en) | 2007-10-22 | 2011-12-06 | Atheromed Inc. | Atherectomy devices and methods |
| JP2014521462A (ja) | 2011-08-05 | 2014-08-28 | シルク・ロード・メディカル・インコーポレイテッド | 急性虚血性脳卒中を治療するための方法及びシステム |
| CN103957825B (zh) | 2011-10-13 | 2018-12-07 | 阿瑟罗迈德公司 | 粥样斑块切除装置、系统和方法 |
| US10751513B2 (en) | 2012-07-24 | 2020-08-25 | Renishaw Plc | Neurosurgical apparatus and methods |
| US9271867B2 (en) | 2012-12-17 | 2016-03-01 | Abbott Medical Optics Inc. | Vitrectomy surgical apparatus with regulating of material processed |
| US9498376B2 (en) | 2012-12-17 | 2016-11-22 | Abbott Medical Optics Inc. | Vitrectomy surgical apparatus with cut timing based on pressures encountered |
| US9486358B2 (en) | 2012-12-17 | 2016-11-08 | Abbott Medical Optics Inc. | Vitrectomy surgical apparatus |
| US20140330286A1 (en) | 2013-04-25 | 2014-11-06 | Michael P. Wallace | Methods and Devices for Removing Obstructing Material From the Human Body |
| US20140324080A1 (en) * | 2013-04-25 | 2014-10-30 | Michael P. Wallace | Intracerebral hemorrhage treatment |
| US9265512B2 (en) | 2013-12-23 | 2016-02-23 | Silk Road Medical, Inc. | Transcarotid neurovascular catheter |
| US11547446B2 (en) | 2014-01-13 | 2023-01-10 | Trice Medical, Inc. | Fully integrated, disposable tissue visualization device |
| WO2015164459A1 (en) | 2014-04-23 | 2015-10-29 | Abbott Medical Optics Inc. | Vitrectomy surgical apparatus employing multisensor pressure feedback |
| JP2016083298A (ja) * | 2014-10-28 | 2016-05-19 | テルモ株式会社 | 血栓吸引カテーテルおよびその使用方法 |
| US11065019B1 (en) | 2015-02-04 | 2021-07-20 | Route 92 Medical, Inc. | Aspiration catheter systems and methods of use |
| DE202016009165U1 (de) | 2015-02-04 | 2023-04-26 | Route 92 Medical, Inc. | System für schnelle Aspirationsthrombektomie |
| US10426497B2 (en) | 2015-07-24 | 2019-10-01 | Route 92 Medical, Inc. | Anchoring delivery system and methods |
| EP4252992A3 (en) | 2016-02-24 | 2024-01-10 | Incept, LLC | Enhanced flexibility neurovascular catheter |
| CA3016336A1 (en) | 2016-03-17 | 2017-09-21 | Trice Medical, Inc. | Clot evacuation and visualization devices and methods of use |
| JP6946265B2 (ja) * | 2016-03-23 | 2021-10-06 | テルモ株式会社 | 医療デバイス |
| CN109310483B (zh) | 2016-04-15 | 2021-11-23 | 史赛克欧洲运营有限责任公司 | 具有旋转的制动器和展开到设置套管锁的骨头内的锚固件的套管锁 |
| US11298041B2 (en) | 2016-08-30 | 2022-04-12 | The Regents Of The University Of California | Methods for biomedical targeting and delivery and devices and systems for practicing the same |
| CN110381855B (zh) | 2017-01-06 | 2023-07-04 | 因赛普特有限责任公司 | 用于动脉瘤治疗装置的抗血栓涂层 |
| EP3568186B1 (en) | 2017-01-10 | 2022-09-14 | Route 92 Medical, Inc. | Aspiration catheter systems |
| US11690645B2 (en) | 2017-05-03 | 2023-07-04 | Medtronic Vascular, Inc. | Tissue-removing catheter |
| CN114948106A (zh) | 2017-05-03 | 2022-08-30 | 美敦力瓦斯科尔勒公司 | 具有导丝隔离衬套的组织移除导管 |
| US10569058B2 (en) * | 2017-05-12 | 2020-02-25 | Ep Dynamics, Inc. | Introducer sheaths |
| US11096758B2 (en) * | 2017-05-23 | 2021-08-24 | Boston Scientific Limited | Surgical guidance systems, devices, and methods |
| EP3406195A1 (en) * | 2017-05-24 | 2018-11-28 | Koninklijke Philips N.V. | Device and a corresponding method for providing spatial information of an interventional device in a live 2d x-ray image |
| FR3067611B1 (fr) * | 2017-06-19 | 2022-12-23 | Hopitaux Paris Assist Publique | Procede pour le traitement d'un tissu cerebral |
| CN111132626B (zh) | 2017-07-17 | 2024-01-30 | 沃雅戈治疗公司 | 轨迹阵列引导系统 |
| JP2021522885A (ja) | 2018-05-01 | 2021-09-02 | インセプト・リミテッド・ライアビリティ・カンパニーIncept,Llc | 血管内部位から閉塞性物質を除去する装置および方法 |
| US11395665B2 (en) | 2018-05-01 | 2022-07-26 | Incept, Llc | Devices and methods for removing obstructive material, from an intravascular site |
| CN115999019A (zh) | 2018-05-17 | 2023-04-25 | 92号医疗公司 | 抽吸导管系统和使用方法 |
| US11471582B2 (en) | 2018-07-06 | 2022-10-18 | Incept, Llc | Vacuum transfer tool for extendable catheter |
| WO2020010310A1 (en) | 2018-07-06 | 2020-01-09 | Imperative Care, Inc. | Sealed neurovascular extendable catheter |
| US11419610B2 (en) | 2018-08-17 | 2022-08-23 | Empress Medical, Inc. | Device and method for passing tension member around tissue mass |
| CN112770680A (zh) | 2018-08-17 | 2021-05-07 | 安普列斯医疗公司 | 用于压迫肿瘤的装置和方法 |
| EP3880096A1 (en) | 2018-11-16 | 2021-09-22 | Medtronic Vascular Inc. | Tissue-removing catheter |
| US11766539B2 (en) | 2019-03-29 | 2023-09-26 | Incept, Llc | Enhanced flexibility neurovascular catheter |
| IL265963A (en) * | 2019-04-09 | 2020-10-28 | Tamar Robotics Ltd | Needle with steering mechanism and tip navigation |
| US11819236B2 (en) | 2019-05-17 | 2023-11-21 | Medtronic Vascular, Inc. | Tissue-removing catheter |
| CN113347916A (zh) | 2019-10-15 | 2021-09-03 | 因普瑞缇夫护理公司 | 用于多变量卒中检测的系统和方法 |
| US11457936B2 (en) | 2019-12-18 | 2022-10-04 | Imperative Care, Inc. | Catheter system for treating thromboembolic disease |
| EP4076611A4 (en) | 2019-12-18 | 2023-11-15 | Imperative Care, Inc. | METHODS AND SYSTEMS FOR THE TREATMENT OF VENOUS THROMBOEMBOLIC DISEASE |
| US11638637B2 (en) | 2019-12-18 | 2023-05-02 | Imperative Care, Inc. | Method of removing embolic material with thrombus engagement tool |
| JP2023517575A (ja) | 2020-03-10 | 2023-04-26 | インパラティブ、ケア、インク. | 可撓性を増強した神経血管カテーテル |
| US11207497B1 (en) | 2020-08-11 | 2021-12-28 | Imperative Care, Inc. | Catheter with enhanced tensile strength |
| US11304723B1 (en) | 2020-12-17 | 2022-04-19 | Avantec Vascular Corporation | Atherectomy devices that are self-driving with controlled deflection |
| WO2023278495A2 (en) | 2021-06-28 | 2023-01-05 | Inquis Medical, Inc. | Apparatuses and methods for controlling removal of obstructive material |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5041082A (en) * | 1986-06-16 | 1991-08-20 | Samuel Shiber | Mechanical atherectomy system and method |
| JP2949783B2 (ja) * | 1990-06-04 | 1999-09-20 | オリンパス光学工業株式会社 | 体腔内処置装置 |
| US5360432A (en) * | 1992-10-16 | 1994-11-01 | Shturman Cardiology Systems, Inc. | Abrasive drive shaft device for directional rotational atherectomy |
| US20060074442A1 (en) * | 2000-04-06 | 2006-04-06 | Revascular Therapeutics, Inc. | Guidewire for crossing occlusions or stenoses |
| US6059731A (en) * | 1998-08-19 | 2000-05-09 | Mayo Foundation For Medical Education And Research | Simultaneous side-and-end viewing underfluid catheter |
| US6217520B1 (en) * | 1998-12-02 | 2001-04-17 | Acuson Corporation | Diagnostic medical ultrasound system and method for object of interest extraction |
| US7708749B2 (en) * | 2000-12-20 | 2010-05-04 | Fox Hollow Technologies, Inc. | Debulking catheters and methods |
| US6533749B1 (en) * | 1999-09-24 | 2003-03-18 | Medtronic Xomed, Inc. | Angled rotary tissue cutting instrument with flexible inner member |
| US6764498B2 (en) * | 1999-12-09 | 2004-07-20 | Hans Alois Mische | Methods and devices for treatment of neurological disorders |
| US7004961B2 (en) * | 2003-01-09 | 2006-02-28 | Edward Wong | Medical device and method for temperature control and treatment of the brain and spinal cord |
| WO2006002343A2 (en) * | 2004-06-24 | 2006-01-05 | Bcu International | Method and medical device for rapid and accurate entry through soft tissue and bone |
| US7806871B2 (en) * | 2005-05-09 | 2010-10-05 | Boston Scientific Scimed, Inc. | Method and device for tissue removal and for delivery of a therapeutic agent or bulking agent |
| EP1901666A4 (en) * | 2005-07-11 | 2010-01-06 | Kyphon Inc | DEVICE AND METHOD FOR REMOVING TISSUES IN A SPINE |
| US20080033465A1 (en) * | 2006-08-01 | 2008-02-07 | Baxano, Inc. | Multi-Wire Tissue Cutter |
| US8628549B2 (en) * | 2006-06-30 | 2014-01-14 | Atheromed, Inc. | Atherectomy devices, systems, and methods |
| WO2008103839A2 (en) * | 2007-02-22 | 2008-08-28 | Spine View, Inc. | Expandable rotating device and method for tissue aspiration |
| IL191443A0 (en) * | 2007-05-14 | 2008-12-29 | Arnon Agmon | A guide for placement of catheter into brain and a method of utilizing the same |
| US20090099581A1 (en) * | 2007-05-24 | 2009-04-16 | Kim Daniel H | Methods and apparatus for treating vascular occlusions |
| US8906053B2 (en) * | 2007-11-12 | 2014-12-09 | Medtronic Xomed, Inc. | Systems and methods for surgical removal of brain tumors |
| US20090138031A1 (en) * | 2007-11-24 | 2009-05-28 | Tsukernik Vladimir B | Thrombectomy catheter with a helical cutter |
| US20100130850A1 (en) * | 2008-11-25 | 2010-05-27 | Pakter Robert L | Flexible Core Surgical Device |
-
2011
- 2011-09-02 EP EP11757491.3A patent/EP2611370A2/en not_active Withdrawn
- 2011-09-02 WO PCT/US2011/050443 patent/WO2012031275A2/en active Application Filing
- 2011-09-02 JP JP2013527362A patent/JP5934219B2/ja not_active Expired - Fee Related
- 2011-09-02 US US13/820,739 patent/US20130158578A1/en not_active Abandoned
-
2016
- 2016-05-06 JP JP2016092980A patent/JP2016154934A/ja active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016154934A (ja) | 2016-09-01 |
| WO2012031275A2 (en) | 2012-03-08 |
| WO2012031275A3 (en) | 2012-08-09 |
| JP2013536740A (ja) | 2013-09-26 |
| EP2611370A2 (en) | 2013-07-10 |
| US20130158578A1 (en) | 2013-06-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5934219B2 (ja) | 脳神経外科手術用デバイス及び関連したシステム及び方法 | |
| US20200214739A1 (en) | Medical device having visual puncture apparatus | |
| EP2077760B1 (en) | Image guided catheters | |
| EP1397074B1 (en) | Tissue-retaining system for ultrasound medical treatment | |
| US9211163B1 (en) | Apparatus and method for minimally invasive intracranial hematoma evacuation with real-time assessment of clot reduction | |
| US20130317296A1 (en) | Dilator with direct visualization | |
| KR20100047870A (ko) | 척추에 접근하여 시각화하기 위한 풍선 캐뉼라 시스템 및 관련 방법 | |
| CA2981434C (en) | System and method for guided port insertion to minimize trauma | |
| CN115551439A (zh) | 定义和改变患者处理时使用的探针运动范围的系统和方法 | |
| US20230061534A1 (en) | Minimally invasive histotripsy systems and methods | |
| US20170065752A1 (en) | System and method for guided removal from an in vivo subject | |
| Mohanty et al. | Initial experience with endoscopic side cutting aspiration system in pure neuroendoscopic excision of large intraventricular tumors | |
| AU2022218591A1 (en) | Guidewire navigation system with direct visualization feature | |
| CN115363709A (zh) | 一种可调弯的血管内超声引导式穿刺方法 | |
| CN113907875A (zh) | 自主超声引导内窥镜 | |
| US20230052455A1 (en) | Tether-free robotic system to perform a remote microsurgery in the central nervous system (cns) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140901 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140901 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150518 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150520 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20150820 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151120 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160404 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160506 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5934219 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |